
自走式処理機

【課題】一旦、エンジン回転数がアイドル回転数に落ちた場合でも、十分な破砕能力を発揮できる状態で破砕処理を行うことができる自走式処理機を提供する。
【解決手段】エンジン93により駆動される油圧ポンプ94から供給される圧油により駆動されて被処理物の処理を行う破砕装置12と、機体外部からの被処理物が投入される投入部から破砕装置12に被処理物を搬送する送りコンベヤ11と、破砕装置12からの処理物を機体外部に排出する排出コンベヤ3と、送りコンベヤ11の動作を指示するボタン83Da1,83Da2,83Da3とを備えた自走式処理機において、ボタン83Da1,83Da2,83Da3による送りコンベヤ11の始動指示に連動して、エンジン94の回転数をアイドル回転数から予め定めた作業回転数に復帰させる。
【解決手段】エンジン93により駆動される油圧ポンプ94から供給される圧油により駆動されて被処理物の処理を行う破砕装置12と、機体外部からの被処理物が投入される投入部から破砕装置12に被処理物を搬送する送りコンベヤ11と、破砕装置12からの処理物を機体外部に排出する排出コンベヤ3と、送りコンベヤ11の動作を指示するボタン83Da1,83Da2,83Da3とを備えた自走式処理機において、ボタン83Da1,83Da2,83Da3による送りコンベヤ11の始動指示に連動して、エンジン94の回転数をアイドル回転数から予め定めた作業回転数に復帰させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、木材破砕機、ジョークラッシャ、シュレッダ、土質改良機等の被処理物を処理する自走式処理機に関する。
【背景技術】
【0002】
自走式処理機は、作業現場で生じる被処理物に対して所定の処理を施し、工事の円滑化やコスト削減、或いは、被処理物の改質等を図るものであり、木材破砕機、ジョークラッシャ、シュレッダ、土質改良機などが知られている。
【0003】
このような自走式処理機として、例えば、特許文献1(特許第3967497号公報)には、破砕装置及びこの破砕装置による破砕作業に関連する作業を行う補助機械を含む複数の機器と、これら複数の機器をそれぞれ駆動する複数の油圧アクチュエータと、これら複数の油圧アクチュエータへの圧油を吐出する少なくとも1つの油圧ポンプと、前記油圧ポンプを駆動するエンジンと、前記複数の油圧アクチュエータをそれぞれ操作する複数の操作手段とを有し、被破砕物である建設現場で発生する大小さまざまな岩石・建設廃材等を、運搬する前にその現場で所定の大きさに破砕する自走式破砕機が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3967497号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記従来技術の自走式破砕機は、破砕装置等の各機器が無負荷となる待機時間にエンジン回転数を低下させることによって、エネルギロスの低減や騒音の低減、排気ガス量の低減を図っており、複数の機器のうちの破砕装置を含む所定の機器のうち動作状態にあるものがすべて被破砕物に対し破砕又は破砕作業に関連する作業を行っている実運転状態であるかそのような作業を行っていない空運転状態であるかを検出し、空運転状態であることが検出された場合にエンジンの回転数を予め設定したアイドル回転数に制御するように構成されている。
【0006】
しかしながら、上記従来技術のような自走式処理機において、エンジン回転数がアイドル回転数に制御された状態で被破砕物が投入されると、破砕装置が十分な破砕能力を発揮できない状態で破砕処理を行うことになり、破砕装置の過負荷や処理物の品質のバラツキなどの発生が懸念される。
【0007】
本発明は上記に鑑みてなされたものであり、一旦、エンジン回転数がアイドル回転数に落ちた場合でも、十分な破砕能力を発揮できる状態で破砕処理を行うことができる自走式処理機を提供することを目的とする。
【課題を解決するための手段】
【0008】
(1)上記目的を達成するために、本発明は、エンジンと、前記エンジンにより駆動される油圧ポンプと、前記油圧ポンプから供給される圧油により駆動されて被処理物の処理を行う処理装置と、機体外部からの前記被処理物が投入される投入部から前記処理装置に前記被処理物を搬送する搬送手段と、前記処理装置からの処理物を機体外部に排出する排出手段と、前記搬送手段の動作を指示する搬送動作指示手段と、前記搬送動作指示手段による前記搬送手段の始動指示に連動して、前記エンジンの回転数をアイドル回転数から予め定めた作業回転数に復帰させる制御を行う制御手段とを備えたものとする。
【0009】
これにより、十分な破砕能力を発揮できる状態での破砕処理を行うことができ、処理物の品質のバラツキを抑制することができる。
【0010】
(2)上記(1)において、好ましくは、前記制御手段は、前記搬送動作指示手段による前記搬送手段の停止指示に連動して、前記エンジンの回転数を予め定めたアイドル回転数に制御するものとする。
【0011】
(3)上記(2)において、好ましくは、前記制御手段は、前記制御手段は、前記搬送動作指示手段による前記搬送手段の停止指示から予め定めた時間が経過すると、前記エンジンの回転数を予め定めたアイドル回転数に制御するものとする。
【0012】
(4)上記(2)において、好ましくは、前記制御手段は、前記搬送動作指示手段を長押しすることにより前記搬送手段の停止指示信号が予め定めた時間発せられると、前記エンジンの回転数を予め定めたアイドル回転数に制御するものとする。
【発明の効果】
【0013】
本発明によれば、一旦、エンジン回転数がアイドル回転数に落ちた場合でも、被破砕物投入前にエンジン回転数を予め定めた作業回転数に復帰させるので、十分な破砕能力を発揮できる状態で破砕処理を行うことができる。
【図面の簡単な説明】
【0014】
【図1】第1の実施の形態に係る自走式木材破砕機の全体構成を示す側面図である。
【図2】第1の実施の形態に係る自走式木材破砕機の全体構成を示す平面図である。
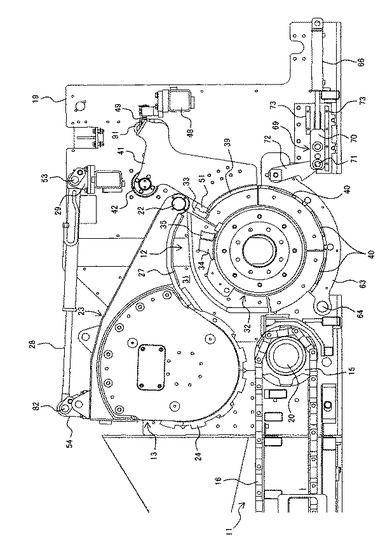
【図3】図1に示した自走式木材破砕機に備えられた破砕装置近傍の詳細構造を示す透視側面図である。
【図4】操作盤の扉開放時の外観構造を示す図である。
【図5】無線操作装置の外観構造を示す図である。
【図6】本実施の形態の自走式木材破砕機に備えられた制御装置の機能ブロック図である。
【図7】操作盤の表示部にエンジンアイドル中のメッセージが表示された場合を示す図である。
【図8】第1の実施の形態の制御装置によるフィーダ停止制御を示す処理フローである。
【図9】第2の実施の形態の変形例の制御装置によるフィーダ停止制御を示す処理フローである。
【発明を実施するための形態】
【0015】
以下、自走式処理機の一例として自走式木材破砕機を例にとり、図面を参照しつつ詳細に説明する。
【0016】
<第1の実施の形態>
本発明の第1の実施の形態を図1〜図8を参照しつつ説明する。
【0017】
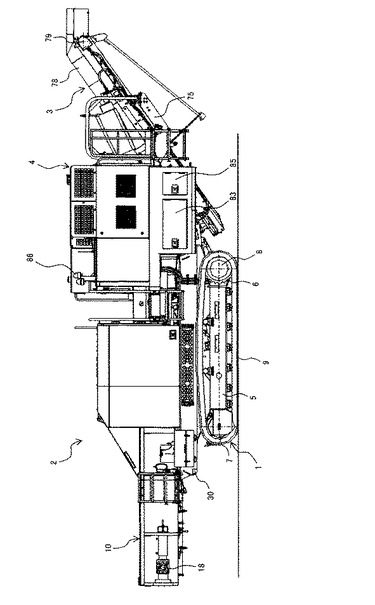
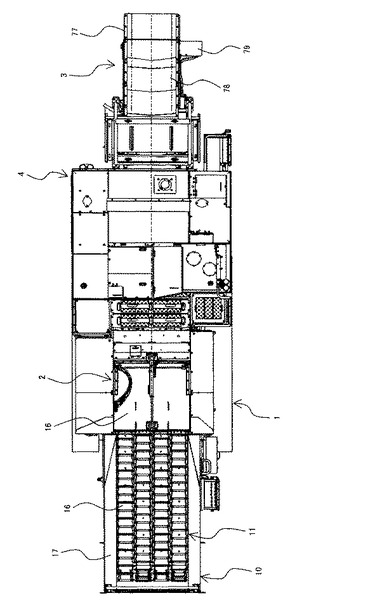
図1は、本実施の形態に係る自走式木材破砕機の全体構成を示す側面図であり、図2はその平面図である。また、図3は、図1に示した自走式木材破砕機に備えられた破砕装置12近傍の詳細構造を示す透視側面図である。なお、以下において、図1及び図2中における左・右に対応する方向を木材破砕機の後・前とする。
【0018】
図1及び図2において、本実施の形態の自走式木材破砕機は、自力走行を可能にする走行体1、走行体1上に設けられ、受け入れた被破砕物を破砕する破砕機能構成部2、破砕機能構成部2で破砕された破砕物を搬送し機外に排出する排出コンベヤ3、搭載した各機器の動力源であるエンジンや各部駆動装置への圧油の吐出を行う油圧ポンプ94(後の図4参照)等を備えた動力装置(パワーユニット)4等によって概略構成されている。
【0019】
走行体1は、トラックフレーム5と、このトラックフレーム5の前後両端部に設けた駆動輪6及び従動輪7と、出力軸を駆動輪6の軸に連結した駆動装置(走行用油圧モータ)8と、駆動輪6及び従動輪7に掛け回した履帯(無限軌道履帯)9とで構成されている。また、トラックフレーム5上には本体フレーム30が設けられており、この本体フレーム30によって、破砕機能構成部2、排出コンベヤ3及び動力装置4等が支持されている。なお、走行体1は、図示したクローラ式に代えて、複数のタイヤで構成されるホイール式等にしても良い。
【0020】
破砕機能構成部2は、投入される被破砕物を受け入れるホッパ10と、このホッパ10内に収容配置された被破砕物の搬送手段としての送りコンベヤ11(図2参照)と、この送りコンベヤ11によって導入された被破砕物に破砕処理を施す処理装置である破砕装置12(図3参照)と、この破砕装置12の手前で破砕装置12に導入される被破砕物を送りコンベヤ11に押し付ける押圧ローラ装置13(図3参照)とを備えている。
【0021】
送りコンベヤ11は、後述する破砕ロータ32側(破砕機前方側)に設けられたスプロケット状の駆動輪15と、その反対側(破砕機後方側)に設けた図示しない従動輪と、これら搬送方向両端部に設けた駆動輪15及び従動輪の間に巻回され、幅方向に複数列(例えば4列、図2参照)列設された搬送体(搬送ベルト、チェーンベルト)16とを備えている。
【0022】
従動輪は、ホッパ10の側壁体17後部に設けた軸受18によって支持され、駆動輪15は、側壁体17の前方側に設けた破砕装置12の側面フレーム(破砕機フレーム)19(図3参照)に設けた軸受84によって支持されている。これにより、送りコンベヤ11は、上記ホッパ10内の下部、すなわちホッパ10の側壁体17の内側から破砕ロータ32(後述)近傍にかけ、ほぼ水平に延設されホッパ10及び破砕装置12の側面フレーム19内に収納配置されている。
【0023】
送りコンベヤ11の駆動輪15の回転軸20は、軸受よりも幅方向外側に設けた駆動装置(図示せず)の出力軸にカップリング等を介して連結している。送りコンベヤ11は、その図示しない駆動装置で駆動輪15を回転駆動させることにより、駆動輪15及び従動輪の間で搬送体16を循環駆動させる。
【0024】
押圧ローラ装置13は、破砕ロータ32(後述)の後方側に近接するように、かつ、送りコンベヤ11の上部にその搬送面に対向するように設けられており、送りコンベヤ11上を搬送される被破砕物を上部から押さえ込みながら破砕ロータ32に向かって破砕物を導入する。この押圧ローラ装置13は、破砕装置12の上方において側面フレーム19に設けた軸受(図示せず)によってその回動軸22が軸支され、これにより鉛直面内を回動自在に(図3中上下方向に揺動自在に)支持された支持部材(アーム)23と、この支持部材23に対し回転自在に設けられた押えローラ24と、支持部材23を回動駆動する油圧シリンダ28とを備えている。
【0025】
支持部材23は、一端に回動軸22を備え、他端(先端側の一端)に押えローラ24を備えている。支持部材23の下部側の端面(破砕ロータ32の上部に対向する端面)は円弧状に湾曲して形成されており、この湾曲部には、後述する破砕室31の一部を構成する湾曲板27が取付けられている。一方、支持部材23の押えローラ24取付け部分は、押えローラ24の径よりも小径の円弧状に形成されており、押えローラ24の外周面が支持部材23から突出した構成となっている。押えローラ24の幅方向(図3中の紙面直交方向)の寸法は、送りコンベヤ11の搬送面の幅と同等かそれよりも大きく設定されている。
【0026】
押えローラ24は、その胴部内に駆動装置(図示せず)を内蔵しており、この駆動装置によって、送りコンベヤ11の搬送面上を搬送される被破砕物の搬送速度とほぼ同じ周速度で回転駆動され、押え込んだ送りコンベヤ11上の被破砕物を送りコンベヤ11と協動して破砕室31に導入するようになっている。
【0027】
油圧シリンダ28は、そのボトム側先端部を側面フレーム19に固定したブラケット29にピン53を介して回動可能に連結され、そのロッド側先端部を支持部材23の後方側(図3中左側)先端部に設けられたブラケット54にピン82を介して回動可能に連結されている。この油圧シリンダ28の伸縮動作により、押圧ローラ装置13を回動軸22を中心に回動させ、送りコンベヤ11に対して上げ下げさせ、離間又は近接させることが可能なようになっている。
【0028】
図3に示すように、破砕装置12は、本体フレーム30の長手方向ほぼ中央部に位置し、破砕室31内で高速回転する破砕ロータ32と、この破砕ロータ32の径方向外側に設けられたアンビル(固定刃)33とを備えている。破砕ロータ32の周囲には、送りコンベヤ11及び押えローラ24によって被破砕物が供給される部分(破砕装置12の後方部分)から破砕ロータ32の正転方向(図3中の時計回り方向、破砕物流通方向)に、支持部材23に取り付けられた湾曲板27、ハウジング41(後述)に取り付けられたアンビル33と湾曲板39、及び、スクリーン(篩部材)40が破砕ロータ32を包囲するように設けられており、これら湾曲板27、アンビル33、湾曲板39、スクリーン40等によって破砕ロータ32周りに破砕片が周回する円筒状の空間である上記破砕室31が概ね画定されている。
【0029】
破砕ロータ32は、破砕装置12の側面フレーム19、又は本体フレーム30上に設けた図示しない支持部材等に設けた軸受(図示せず)に回転自在に支持されており、その外周部には、複数の支持部材34と、各支持部材34の正転方向前面側にボルト等(図示せず)で取り付けられた破砕ビット(衝突板、或いは破砕刃等)35とを備えている。破砕ビット35は、破砕ロータ32が正転方向に回転する際に、その刃面が支持部材34に先行するように配置されており、この刃面により被破砕物を打撃する。なお、図3においては、1組の破砕ビット35及び支持部材34を代表して示す。
【0030】
ハウジング41は、前出の押圧ローラ装置13の回動軸22の上方にて側面フレーム19に設けられた図示しない軸受に支持された回動軸42を支点に前後方向に回動可能に支持されており、油圧シリンダ50により回動駆動される。そして、このハウジング41の破砕室31側にアンビル33及び湾曲板39が配置されている。
【0031】
アンビル33は、ハウジング41における上記湾曲板39の取り付け部よりも破砕ロータ32の正転方向上流側(以下、上流側と称する)に支持部材51を介して取り付けられており、破砕室31に導入された被破砕物が衝突する衝突面が破砕ロータ32の回転に伴って破砕室31内を周回する破砕片(被破砕物)に対向するように配置されている。支持部材51及びアンビル33は、図示しないボルト等でハウジング41に取り付けられている。
【0032】
ハウジング41の前端部は、破砕機側面カバー19に固定した支持部材48にシアピン49を介して連結されており、破砕作業時には、アンビル33が破砕室31に臨む姿勢で固定、保持されている。ハウジング41を破砕姿勢とした状態での破砕処理(以下、通常破砕処理と称する)中に、アンビル33に過大な負荷が作用してシアピン98にも許容を超える負荷がかかった場合には、シアピン98が破断してハウジング41の拘束が解かれ、アンビル33が破砕室31から退避するようにハウジング41が回動軸42を中心に回動することにより、各部の損傷が防止される。なお、このときのハウジング41の回動退避は図示しないリミットスイッチ等により検出されるようになっており、回動退避の検出時の検出信号はコントローラに送られ、破砕ロータ32の駆動装置を停止させる指令信号が出力されるようになっている。
【0033】
スクリーン40は、ハウジング41が破砕姿勢である場合の湾曲板39の破砕物流通方向下流側、かつ破砕ロータ32の径方向外側に設けられ、破砕ロータ32と同心の円にほぼ沿って湾曲している。また、スクリーン40は、破砕ロータ32に対向する内径面から反対面に貫通し、破砕物を破砕機外に排出する複数の排出孔(図示せず)を有している。この図示しない排出孔の孔径より小さくなった破砕物が破砕機外に排出される。
【0034】
破砕ロータ32の下方には、スクリーン40を破砕ロータ32の外周側位置に保持する枠型のスクリーン支持部材(スクリーンホルダ)63が設けられている。このスクリーン支持部材63は、後端部が回動軸64を介して側面フレーム19、又は本体フレーム30上に設けた図示しない支持部材等に固定され、回動軸64を中心に上下方向に回動する構成となっており、前端部に設けられたリンク機構69により破砕ロータ32に対して進退駆動される。
【0035】
リンク機構69は、ボトム側端部を側面カバー19に回動可能に連結された油圧シリンダ66の伸縮動作をスクリーン支持部材63の破砕ロータ32に対する進退動作に変換するものであり、油圧シリンダ66のロッド側端部に設けられ、油圧シリンダ66の伸縮方向に沿って移動するスライドリンク70と、一方側端部(図2中上側端部)を上記スクリーン支持部材63の周方向他方側端部(図2中右側端部)に回動可能に連結され、他方側端部(図2中下側端部)をピン71を介してスライドリンク70と回動自在に連結された保持リンク72とを備えている。また、73は上記スライドリンク70の移動方向をガイドすると共に、スライドリンク70が保持リンク72から受ける縦荷重を支持するガイド部材である。
【0036】
破砕作業時には、油圧シリンダ66が伸長してリンク機構69のスライドリンク70と保持リンク72とがほぼ直角に折れ曲がった状態となり、スクリーン支持部材63が破砕ロータ32に最も近づいた位置に位置する状態となる。この状態から油圧シリンダ66が縮短するにつれてスライドリンク70と保持リンク72とが回動して徐々に開き、スクリーン支持部材63が徐々に破砕ロータ32から離間する方向に移動する(下降する)。そして、油圧シリンダ66が最も縮短した状態になると、スライドリンク70と保持リンク72とがほぼ伸びきった状態となり、スクリーン支持部材63が破砕ロータ32から最も遠い位置に位置する状態となる。このように、リンク機構69によってスクリーン支持部材63が回動軸64を中心に下方へ回動下降されると、側面フレーム19の下部に形成した切り欠き部(図示せず)からスクリーン支持部材63に載置されたスクリーン40を側方に引き抜くことができ、容易にスクリーン40を交換することができる。
【0037】
排出コンベヤ3は、排出側(前方側)寄りの部分において、動力装置4から突出して設けた支持部材75に支持されており、その反対側(後方側)部分が本体フレーム30に支持されている。これにより、排出コンベヤ3は、破砕装置12の下方から動力装置4の下方を通され、動力装置4の下方から破砕機前方側外方へ上り傾斜となるように配置されている。排出コンベヤ3は、長手方向(前後方向)両端に設けた駆動輪と従動輪(共に図示せず)との間に巻回したコンベヤベルト(図示せず)上に設けたコンベヤカバー78を備えている。また、排出コンベヤ3の駆動輪(図示せず)は、軸受の幅方向外側に設けた駆動装置(排出コンベヤ用油圧モータ)79の出力軸にカップリング等を介して連結されており、この駆動装置79を回転駆動させることにより、駆動輪及び従動輪の間でコンベヤベルトを循環駆動させるようになっている。また、排出コンベヤ3の搬送経路上には磁選機(図示せず)が設けられており、運搬の途中で破砕物に混入している釘や鉄片等の金属を吸着して取り除き最終的に搬出するようになっている。
【0038】
動力装置4は、本体フレーム30の長手方向前方側の端部上に搭載されており、その下方側面には、木材破砕機の走行や破砕処理に関する操作・設定、モニタリング等を行うための操作盤83と、無線操作装置84(後述)等が収納された収納ボックス85とが設けられている。また、動力装置4の上方には、機体の各種状態をオペレータに報知するためのパトライト86が設けられている。
【0039】
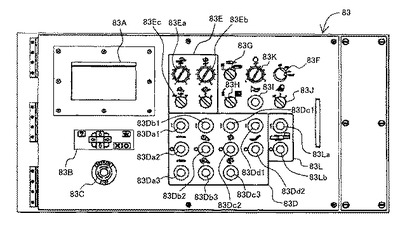
図4は、操作盤の扉開放時の外観構造を示す図であり、図5は無線操作装置の外観構造を示す図である。
【0040】
図4に示すように、操作盤83には、表示部83A、入力部83B、緊急停止スイッチ83C、作動装置類の起動停止指示部83D、供給・破砕動作操作部83E、メインスイッチ83F、運転モード選択スイッチ83G、操作手段の選択スイッチ83H、警報ボタン83I、照明ボタン83J、エンジン回転数設定スイッチ83K、連動運転操作部83L等が備えられている。
【0041】
表示部83Aは、機体の稼動状況や各種データ、案内、メッセージ等を表示するもので、タッチパネル機能等によって各種入力操作も可能である。この表示部83Aに表示するメッセージとしては、エンジン93をアイドル回転数に制御するエンジンアイドル制御中のメッセージ(後の図7参照)等がある。入力部83Bは、表示部83Aに表示された設定画面等においてカーソルの移動や選択・決定、ヘルプ画面の呼び出し等を行う。
【0042】
緊急停止スイッチ83Cは、緊急時に機体の各作動装置を即時的に停止させるスイッチである。メインスイッチ83Fは、電気系統のON/OFFやエンジンの始動等を操作する。運転モード選択スイッチ83Gは、走行操作を行う走行モード、破砕作業を行う作業モード、メンテナンスに設定するメンテナンスモードのいずれかを選択する。選択スイッチ83Hは、操作手段として当該操作盤83とリモコン(不図示)のいずれかを有効とするかを設定する。警報ボタン83Iは警報音を鳴らす指示を、照明ボタン83Jは照明の光量設定や消灯の指示をする。エンジン回転数設定スイッチ83Kは、エンジンの回転数をダイヤルの回転により設定する。
【0043】
起動停止指示部83Dには、送りコンベヤ11の停止・正転方向起動・逆転方向起動を各指示する停止ボタン83Da1・正転起動ボタン83Da2・逆転起動ボタン83Da3、押圧ローラ装置13の停止・正転方向起動・逆転方向起動を各指示する停止ボタン83Db1・正転起動ボタン83Db2・逆転起動ボタン83Db3、破砕ロータ15の停止・正転方向起動・逆転方向起動を各指示する停止ボタン83Dc1・正転起動ボタン83Dc2・逆転起動ボタン83Dc3、排出コンベヤ3の起動・停止を各指示する起動ボタン83Dd1・停止ボタン83Dd2が配置されている。
【0044】
また、供給・破砕動作操作部83Eには、フィーダ(送りコンベヤ11及び押圧ローラ装置13)の正転方向の動作速度の調整用のフィーダ速度調整ダイヤル(フィーダ速度調整手段)83Ea、破砕ロータ15の正転方向の回転速度の調整用の破砕ロータ速度調整ダイヤル83Eb、押圧ローラ装置13を上げ下げする油圧シリンダ28のロック/フリーの切り換え等を行うためのシリンダ動作切換スイッチ83Ecが配置されている。
【0045】
図5に示すように、無線操作装置84には、無線操作装置84の電源の入/切を各指示する電源入ボタン84A・電源切ボタン84B、フィーダ(送りコンベヤ11及び押圧ローラ装置13)の正転方向起動・逆転方向起動・停止を各指示する正転起動ボタン84C・逆転起動ボタン84D・停止ボタン84E、押圧ローラ装置13の上げ下げを各指示する上昇ボタン84F・押圧ボタン84G、無線操作装置84の各ボタン84A〜84Gの役割の切り換えを行うためのボタン操作切換ボタン84H、自走式木材破砕機のエンジンを含む全機能の停止を指示する全停止ボタン84Iが配置されている。
【0046】
ボタン操作切換ボタン84Hの操作により、電源入ボタン84Aは警報ボタン、正転起動ボタン84C・逆転起動ボタン84Dは走行体右側履帯の前進ボタン・後進ボタン、上昇ボタン84F・押圧ボタン84Gは走行体左側履帯の前進ボタン・後進ボタンの機能にそれぞれ切り換えられる。
【0047】
図6は、本実施の形態の自走式木材破砕機に備えられた制御装置の機能ブロック図である。
【0048】
図6において、制御装置90は、操作盤83や無線操作装置84からボタンやスイッチなどの操作により出力された指示信号が入力される入力回路90aと、入力回路90aに入力された指示信号に基づいて各種演算を行うCPU90bと、CPU90bでの演算結果を指示信号として、油圧ポンプ94から送りコンベヤ11や押圧ローラ装置13の押えローラ24の駆動装置(図示せず)に供給される圧油の流れを制御する各電磁弁(図示せず)を有する電磁弁群92に出力する出力回路90cと、エンジンコントローラ91等の他の制御系との信号の授受を行うための通信回路90dとを備えている。なお、図示しないが、CPU90bは各種情報の記憶などの各種機能も有している。
【0049】
エンジンコントローラ91は、入力回路91a、CPU91b、出力回路91c、及び、通信回路91dを有している。エンジンコントローラ91は、制御装置90からのエンジン回転数に関する指示信号を受信すると、その指示信号に基づいてエンジン93に設けられたインジェクタ93aの制御信号を生成し、エンジン93での燃料噴射量を調整することにより、エンジン回転数を制御する。
【0050】
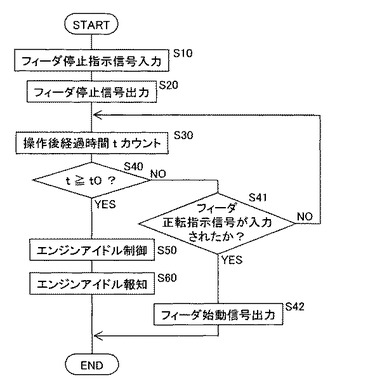
図8は、フィーダ停止時の制御装置によるエンジン回転数制御を示す処理フローである。
【0051】
図8において、制御装置90は、まず、オペレータにより操作盤83又は無線操作装置94からフィーダ停止指示信号(操作盤83では、停止ボタンDa1操作時の送りコンベヤ停止指示信号)が入力されると(ステップS10)、フィーダの駆動装置への圧油を制御してフィーダを停止するよう電磁弁群92にフィーダ停止指示信号を出力し(ステップS20)、操作後経過時間tのカウントを開始する(ステップS30)。そして、操作後経過時間tが予め定めた基準時間t0よりも長いかどうかを判定し(ステップS40)、判定結果がYESの場合は、エンジン93の回転数を予め定めたアイドル回転数に制御する指示信号をエンジンコントローラ91に出力してエンジンアイドル制御を行い(ステップS50)、操作盤83の表示部83Aへのメッセージ(図7参照)の表示やパトライト86の点灯などによりエンジンアイドル制御中であることをオペレータに報知し(ステップS60)、処理を終了する。また、ステップS40での判定結果がNOの場合は、操作盤83又は無線操作装置94によりフィーダ正転指示信号(操作盤83では、正転起動ボタン83Da2操作時の送りコンベヤ正転起動指示信号)が入力されたかどうかを判定し(ステップS41)、判定結果がYESの場合は、フィーダの駆動装置への圧油を制御してフィーダを正転駆動するよう電磁弁群92に指示信号を出力し(ステップS42)、処理を終了する。また、ステップS41での判定結果がNOの場合は、ステップS40での判定結果がYESになるまで、ステップS30,S41の処理を繰り返す。
【0052】
以上のように構成した本実施の形態における動作を説明する。
【0053】
操作盤83又は無線操作装置84を操作して、送りコンベヤ11、押圧ローラ装置13、破砕ロータ32、及び、排出コンベヤ3を駆動した状態で、グラップル等の適宜の作業具を備えた重機(油圧ショベル等)等によってホッパ10内に被破砕物を投入すると、被破砕物が送りコンベヤ11の搬送ベルト16上に載置され、循環駆動する搬送ベルト16によって破砕装置12に向かって搬送される。被破砕物が押圧ローラ装置13付近まで搬送されると、押えローラ24が被破砕物上に乗り上げ、押えローラ24の自重により被破砕物が送りコンベヤ11の搬送面に押し付けられる格好となる。このようにして押えローラ24は、送りコンベヤ11との間に被破砕物を挟持した状態で、送りコンベヤ11と協働して破砕室31へ被破砕物を導入する。その際、被破砕物は押えローラ24と送りコンベヤ11とに挟持された部分を支点に片持ち梁状に破砕室31内に向かって突出する。
【0054】
破砕室31内に突出した被破砕物には高速回転する破砕ロータ32の破砕ビット35が下方から衝突し、これにより被破砕物が粗破砕される。このように粗破砕されて破砕室31内に跳ね上げられた被破片はアンビル33に衝突し、その衝撃力によりさらに細かく破砕される。破砕片はその後も破砕ロータ32の回転に伴って破砕室31内を周回し破砕ビット35、アンビル33、破砕室31の内壁面等と衝突して破砕される。そして、周回する破砕片のうちスクリーン40の排出孔を通過する大きさに細粒化されたものが順次スクリーン40を通過して破砕室31から排出される。破砕室31から排出された破砕物は、排出コンベヤ3上に落下して排出コンベヤ3によって搬送され機外に排出される。
【0055】
このような自走式木材破砕機において、操作盤83の停止ボタン83Da1を押下することにより、送りコンベヤ11の停止を指示すると、送りコンベヤ11が停止されて破砕装置12への被破砕物の搬送が停止され(図8のステップS10,S20)、その後、予め設定した時間(基準時間t0)が経過すると、エンジンの回転数が予め定めたアイドル回転数に制御される(図8のステップS40,S50)。このとき、操作盤83の表示部83Aへのメッセージ(図7参照)の表示やパトライト86の点灯などによりエンジンアイドル制御中であることをオペレータに報知する(図8のステップS60)。その後、正転起動ボタン83Da2を押下することにより、送りコンベヤ11の正転駆動を指示すると、エンジン93のアイドル回転数での制御が解除されて通常作業時(破砕作業時)の回転数(作業回転数)に制御され、送りコンベヤ11が正転方向に駆動されて、破砕装置12への被破砕物の搬送が開始される。
【0056】
同様に、無線操作装置84の停止ボタン84Eを押下することにより、送りコンベヤ11の停止を指示すると、送りコンベヤ11が停止されて破砕装置12への被破砕物の搬送が停止され(図8のステップS10,S20)、その後、予め設定した時間(基準時間t0)が経過すると、エンジンの回転数が予め定めたアイドル回転数に制御される(図8のステップS40,S50)。このとき、操作盤83の表示部83Aへのメッセージ(図7参照)の表示やパトライト86の点灯などによりエンジンアイドル制御中であることをオペレータに報知する(図8のステップS60)。その後、正転起動ボタン84Cを押下することにより、送りコンベヤ11の正転駆動を指示すると、エンジン93のアイドル回転数での制御が解除されて通常作業時(破砕作業時)の回転数(作業回転数)に制御され、送りコンベヤ11が正転方向に駆動されて、破砕装置12への被破砕物の搬送が開始される。
【0057】
操作盤83の停止ボタン83Da1又は無線操作装置84の停止ボタン84Eの押下後から基準時間t0が経過する前に正転起動ボタン83Da2又は正転起動ボタン84Cを押下すると、送りコンベヤ11が正転方向に駆動されて、破砕装置12への被破砕物の搬送が開始されるとともに、エンジンの回転数が予め定めたアイドル回転数とならず、通常作業時(破砕処理時)の回転数(作業回転数)に維持される。
【0058】
なお、破砕処理中において、万一、破砕ビット35とアンビル33の間に石や金属などの異物が噛み込んだ場合には、破砕ビット35からアンビル33に過大な負荷が加わり、その負荷がハウジング41と支持部材48を連結するシアピン49に伝わる。このように、アンビル33に過大な負荷が作用してシアピン49にも許容を超える負荷がかかった場合には、シアピン49が破断してハウジング41の拘束が解かれ、アンビル33が破砕室31から退避するようにハウジング41が回動軸42を中心に回動する。また、図示しないセンサなどにより、ハウジング41の回動退避を検出すると、木材破砕機は被破砕物の破砕動作、すなわち、被破砕物の搬入(送りコンベヤ11の動作)及び破砕ロータ32の回転等を停止する。
【0059】
以上のように構成した本実施の形態における効果を説明する。
【0060】
従来技術における自走式破砕機は、破砕装置等の各機器が無負荷となる待機時間にエンジン回転数を低下させることによって、エネルギロスの低減や騒音の低減、排気ガス量の低減を図っており、複数の機器のうちの破砕装置を含む所定の機器のうち動作状態にあるものがすべて被破砕物に対し破砕又は破砕作業に関連する作業を行っている実運転状態であるかそのような作業を行っていない空運転状態であるかを検出し、空運転状態であることが検出された場合にエンジンの回転数を予め設定したアイドル回転数に制御するように構成されている。しかしながら、上記従来技術のような自走式処理機において、エンジン回転数がアイドル回転数に制御された状態で被破砕物が投入されると、破砕装置が十分な破砕能力を発揮できない状態で破砕処理を行うことになり、破砕装置の過負荷や処理物の品質のバラツキなどの発生が懸念される。
【0061】
これに対し本実施の形態においては、送りコンベヤ11の停止・正転方向起動・逆転方向起動を各指示するボタン83Da1,83Da2,83Da3や、フィーダ(送りコンベヤ11及び押圧ローラ装置13)の正転方向起動・逆転方向起動・停止を各指示するボタン84C,84D,84Eなどの操作による指示に基づいて、エンジン93の回転数を予め定めたアイドル回転数から予め定めた作業回転数に制御するように構成したので、一旦、エンジン回転数がアイドル回転数に落ちた場合でも、十分な破砕能力を発揮できる状態での破砕処理を行うことができるので、処理物の品質のバラツキを抑制することができる。
【0062】
すなわち、正転起動ボタン83Da2、又は、正転起動ボタン84Cを押下することにより、送りコンベヤ11の正転駆動を指示すると、エンジン93のアイドル回転数での制御が解除されて通常作業時(破砕作業時)の回転数に制御されるように構成し、送りコンベヤ11の正転駆動による破砕装置12への被破砕物の投入前に破砕装置12の破砕ロータ32の回転数が十分に復旧した状態にすることが可能となり、十分な破砕能力を発揮できる状態での破砕処理を行うことができ、処理物の品質のバラツキを抑制することができる。
【0063】
また、従来技術のような自走式処理機においては、実際には空運転状態であっても、その動作状態によっては実運転状態であると判定されることが懸念され、この場合には、エンジン回転数をアイドル回転数に低下させる制御が行われず、エネルギロスの低減や騒音の低減、排気ガス量の低減を図ることができないという問題点もあった。これに対し、本実施の形態においては、操作盤83の停止ボタン83Da1、又は、無線操作装置84の停止ボタン84Eを押下することによる送りコンベヤ11の停止指示以降に、エンジン93の回転数を予め定めたアイドル回転数に制御するように構成したので、より確実にエンジン回転数をアイドル回転数に低下させることができる。
【0064】
<第2の実施の形態>
本発明の第2の実施の形態を図9を参照しつつ説明する。
【0065】
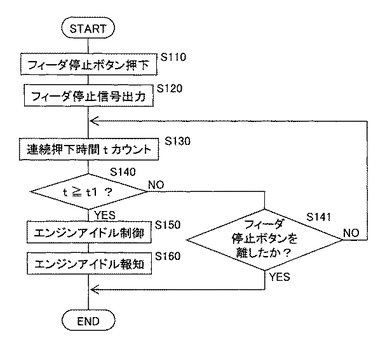
図9は、本実施の形態における制御装置によるフィーダ停止制御を示す処理フローである。図中、第1の実施の形態と同様の構成には同じ符号を付し説明を省略する。
【0066】
図9において、制御装置90は、まず、操作盤83又は無線操作装置94のフィーダ停止ボタン(停止ボタンDa1,84E)の押下によりフィーダ停止指示信号(操作盤83では、停止ボタンDa1操作時の送りコンベヤ停止指示信号)が入力されると(ステップS110)、フィーダの駆動装置への圧油を制御してフィーダを停止するよう電磁弁群92に指示信号を出力し(ステップS120)、フィーダ停止ボタンの連続押下時間tのカウントを開始する(ステップS130)。そして、操作後経過時間tが予め定めた基準時間t1よりも長いかどうかを判定し(ステップS140)、判定結果がYESの場合は、エンジン93の回転数を予め定めたアイドル回転数に制御する指示信号をエンジンコントローラ91に出力してエンジンアイドル制御を行い(ステップS150)、操作盤83の表示部83Aへのメッセージ(図7参照)の表示やパトライト86の点灯などによりエンジンアイドル制御中であることをオペレータに報知し(ステップS160)、処理を終了する。また、ステップS140での判定結果がNOの場合は、操作盤83又は無線操作装置94のフィーダ停止ボタンを離したかどうかを判定し(ステップS141)、判定結果がYESの場合は、処理を終了する。また、ステップS141での判定結果がNOの場合は、ステップS130,S140の処理を繰り返す。
【0067】
その他の構成は、第1の実施の形態と同様である。
【0068】
以上のように構成した本実施の形態においても第1の実施の形態と同様の効果を得ることができる。
【符号の説明】
【0069】
1 走行体
2 破砕機能構成部
3 排出コンベヤ
4 動力装置(パワーユニット)
10 ホッパ
11 送りコンベヤ
12 破砕装置
13 押圧ローラ装置
16 搬送体(搬送ベルト、チェーンベルト)
19 側面フレーム(破砕機フレーム)
24 押えローラ
28 油圧シリンダ
31 破砕室
32 破砕ロータ
33 アンビル(固定刃)
35 破砕ビット
39 湾曲板
40 スクリーン(篩部材)
41 ハウジング
83 操作盤
84 無線操作装置
85 収納ボックス
86 パトライト
【技術分野】
【0001】
本発明は、木材破砕機、ジョークラッシャ、シュレッダ、土質改良機等の被処理物を処理する自走式処理機に関する。
【背景技術】
【0002】
自走式処理機は、作業現場で生じる被処理物に対して所定の処理を施し、工事の円滑化やコスト削減、或いは、被処理物の改質等を図るものであり、木材破砕機、ジョークラッシャ、シュレッダ、土質改良機などが知られている。
【0003】
このような自走式処理機として、例えば、特許文献1(特許第3967497号公報)には、破砕装置及びこの破砕装置による破砕作業に関連する作業を行う補助機械を含む複数の機器と、これら複数の機器をそれぞれ駆動する複数の油圧アクチュエータと、これら複数の油圧アクチュエータへの圧油を吐出する少なくとも1つの油圧ポンプと、前記油圧ポンプを駆動するエンジンと、前記複数の油圧アクチュエータをそれぞれ操作する複数の操作手段とを有し、被破砕物である建設現場で発生する大小さまざまな岩石・建設廃材等を、運搬する前にその現場で所定の大きさに破砕する自走式破砕機が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3967497号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記従来技術の自走式破砕機は、破砕装置等の各機器が無負荷となる待機時間にエンジン回転数を低下させることによって、エネルギロスの低減や騒音の低減、排気ガス量の低減を図っており、複数の機器のうちの破砕装置を含む所定の機器のうち動作状態にあるものがすべて被破砕物に対し破砕又は破砕作業に関連する作業を行っている実運転状態であるかそのような作業を行っていない空運転状態であるかを検出し、空運転状態であることが検出された場合にエンジンの回転数を予め設定したアイドル回転数に制御するように構成されている。
【0006】
しかしながら、上記従来技術のような自走式処理機において、エンジン回転数がアイドル回転数に制御された状態で被破砕物が投入されると、破砕装置が十分な破砕能力を発揮できない状態で破砕処理を行うことになり、破砕装置の過負荷や処理物の品質のバラツキなどの発生が懸念される。
【0007】
本発明は上記に鑑みてなされたものであり、一旦、エンジン回転数がアイドル回転数に落ちた場合でも、十分な破砕能力を発揮できる状態で破砕処理を行うことができる自走式処理機を提供することを目的とする。
【課題を解決するための手段】
【0008】
(1)上記目的を達成するために、本発明は、エンジンと、前記エンジンにより駆動される油圧ポンプと、前記油圧ポンプから供給される圧油により駆動されて被処理物の処理を行う処理装置と、機体外部からの前記被処理物が投入される投入部から前記処理装置に前記被処理物を搬送する搬送手段と、前記処理装置からの処理物を機体外部に排出する排出手段と、前記搬送手段の動作を指示する搬送動作指示手段と、前記搬送動作指示手段による前記搬送手段の始動指示に連動して、前記エンジンの回転数をアイドル回転数から予め定めた作業回転数に復帰させる制御を行う制御手段とを備えたものとする。
【0009】
これにより、十分な破砕能力を発揮できる状態での破砕処理を行うことができ、処理物の品質のバラツキを抑制することができる。
【0010】
(2)上記(1)において、好ましくは、前記制御手段は、前記搬送動作指示手段による前記搬送手段の停止指示に連動して、前記エンジンの回転数を予め定めたアイドル回転数に制御するものとする。
【0011】
(3)上記(2)において、好ましくは、前記制御手段は、前記制御手段は、前記搬送動作指示手段による前記搬送手段の停止指示から予め定めた時間が経過すると、前記エンジンの回転数を予め定めたアイドル回転数に制御するものとする。
【0012】
(4)上記(2)において、好ましくは、前記制御手段は、前記搬送動作指示手段を長押しすることにより前記搬送手段の停止指示信号が予め定めた時間発せられると、前記エンジンの回転数を予め定めたアイドル回転数に制御するものとする。
【発明の効果】
【0013】
本発明によれば、一旦、エンジン回転数がアイドル回転数に落ちた場合でも、被破砕物投入前にエンジン回転数を予め定めた作業回転数に復帰させるので、十分な破砕能力を発揮できる状態で破砕処理を行うことができる。
【図面の簡単な説明】
【0014】
【図1】第1の実施の形態に係る自走式木材破砕機の全体構成を示す側面図である。
【図2】第1の実施の形態に係る自走式木材破砕機の全体構成を示す平面図である。
【図3】図1に示した自走式木材破砕機に備えられた破砕装置近傍の詳細構造を示す透視側面図である。
【図4】操作盤の扉開放時の外観構造を示す図である。
【図5】無線操作装置の外観構造を示す図である。
【図6】本実施の形態の自走式木材破砕機に備えられた制御装置の機能ブロック図である。
【図7】操作盤の表示部にエンジンアイドル中のメッセージが表示された場合を示す図である。
【図8】第1の実施の形態の制御装置によるフィーダ停止制御を示す処理フローである。
【図9】第2の実施の形態の変形例の制御装置によるフィーダ停止制御を示す処理フローである。
【発明を実施するための形態】
【0015】
以下、自走式処理機の一例として自走式木材破砕機を例にとり、図面を参照しつつ詳細に説明する。
【0016】
<第1の実施の形態>
本発明の第1の実施の形態を図1〜図8を参照しつつ説明する。
【0017】
図1は、本実施の形態に係る自走式木材破砕機の全体構成を示す側面図であり、図2はその平面図である。また、図3は、図1に示した自走式木材破砕機に備えられた破砕装置12近傍の詳細構造を示す透視側面図である。なお、以下において、図1及び図2中における左・右に対応する方向を木材破砕機の後・前とする。
【0018】
図1及び図2において、本実施の形態の自走式木材破砕機は、自力走行を可能にする走行体1、走行体1上に設けられ、受け入れた被破砕物を破砕する破砕機能構成部2、破砕機能構成部2で破砕された破砕物を搬送し機外に排出する排出コンベヤ3、搭載した各機器の動力源であるエンジンや各部駆動装置への圧油の吐出を行う油圧ポンプ94(後の図4参照)等を備えた動力装置(パワーユニット)4等によって概略構成されている。
【0019】
走行体1は、トラックフレーム5と、このトラックフレーム5の前後両端部に設けた駆動輪6及び従動輪7と、出力軸を駆動輪6の軸に連結した駆動装置(走行用油圧モータ)8と、駆動輪6及び従動輪7に掛け回した履帯(無限軌道履帯)9とで構成されている。また、トラックフレーム5上には本体フレーム30が設けられており、この本体フレーム30によって、破砕機能構成部2、排出コンベヤ3及び動力装置4等が支持されている。なお、走行体1は、図示したクローラ式に代えて、複数のタイヤで構成されるホイール式等にしても良い。
【0020】
破砕機能構成部2は、投入される被破砕物を受け入れるホッパ10と、このホッパ10内に収容配置された被破砕物の搬送手段としての送りコンベヤ11(図2参照)と、この送りコンベヤ11によって導入された被破砕物に破砕処理を施す処理装置である破砕装置12(図3参照)と、この破砕装置12の手前で破砕装置12に導入される被破砕物を送りコンベヤ11に押し付ける押圧ローラ装置13(図3参照)とを備えている。
【0021】
送りコンベヤ11は、後述する破砕ロータ32側(破砕機前方側)に設けられたスプロケット状の駆動輪15と、その反対側(破砕機後方側)に設けた図示しない従動輪と、これら搬送方向両端部に設けた駆動輪15及び従動輪の間に巻回され、幅方向に複数列(例えば4列、図2参照)列設された搬送体(搬送ベルト、チェーンベルト)16とを備えている。
【0022】
従動輪は、ホッパ10の側壁体17後部に設けた軸受18によって支持され、駆動輪15は、側壁体17の前方側に設けた破砕装置12の側面フレーム(破砕機フレーム)19(図3参照)に設けた軸受84によって支持されている。これにより、送りコンベヤ11は、上記ホッパ10内の下部、すなわちホッパ10の側壁体17の内側から破砕ロータ32(後述)近傍にかけ、ほぼ水平に延設されホッパ10及び破砕装置12の側面フレーム19内に収納配置されている。
【0023】
送りコンベヤ11の駆動輪15の回転軸20は、軸受よりも幅方向外側に設けた駆動装置(図示せず)の出力軸にカップリング等を介して連結している。送りコンベヤ11は、その図示しない駆動装置で駆動輪15を回転駆動させることにより、駆動輪15及び従動輪の間で搬送体16を循環駆動させる。
【0024】
押圧ローラ装置13は、破砕ロータ32(後述)の後方側に近接するように、かつ、送りコンベヤ11の上部にその搬送面に対向するように設けられており、送りコンベヤ11上を搬送される被破砕物を上部から押さえ込みながら破砕ロータ32に向かって破砕物を導入する。この押圧ローラ装置13は、破砕装置12の上方において側面フレーム19に設けた軸受(図示せず)によってその回動軸22が軸支され、これにより鉛直面内を回動自在に(図3中上下方向に揺動自在に)支持された支持部材(アーム)23と、この支持部材23に対し回転自在に設けられた押えローラ24と、支持部材23を回動駆動する油圧シリンダ28とを備えている。
【0025】
支持部材23は、一端に回動軸22を備え、他端(先端側の一端)に押えローラ24を備えている。支持部材23の下部側の端面(破砕ロータ32の上部に対向する端面)は円弧状に湾曲して形成されており、この湾曲部には、後述する破砕室31の一部を構成する湾曲板27が取付けられている。一方、支持部材23の押えローラ24取付け部分は、押えローラ24の径よりも小径の円弧状に形成されており、押えローラ24の外周面が支持部材23から突出した構成となっている。押えローラ24の幅方向(図3中の紙面直交方向)の寸法は、送りコンベヤ11の搬送面の幅と同等かそれよりも大きく設定されている。
【0026】
押えローラ24は、その胴部内に駆動装置(図示せず)を内蔵しており、この駆動装置によって、送りコンベヤ11の搬送面上を搬送される被破砕物の搬送速度とほぼ同じ周速度で回転駆動され、押え込んだ送りコンベヤ11上の被破砕物を送りコンベヤ11と協動して破砕室31に導入するようになっている。
【0027】
油圧シリンダ28は、そのボトム側先端部を側面フレーム19に固定したブラケット29にピン53を介して回動可能に連結され、そのロッド側先端部を支持部材23の後方側(図3中左側)先端部に設けられたブラケット54にピン82を介して回動可能に連結されている。この油圧シリンダ28の伸縮動作により、押圧ローラ装置13を回動軸22を中心に回動させ、送りコンベヤ11に対して上げ下げさせ、離間又は近接させることが可能なようになっている。
【0028】
図3に示すように、破砕装置12は、本体フレーム30の長手方向ほぼ中央部に位置し、破砕室31内で高速回転する破砕ロータ32と、この破砕ロータ32の径方向外側に設けられたアンビル(固定刃)33とを備えている。破砕ロータ32の周囲には、送りコンベヤ11及び押えローラ24によって被破砕物が供給される部分(破砕装置12の後方部分)から破砕ロータ32の正転方向(図3中の時計回り方向、破砕物流通方向)に、支持部材23に取り付けられた湾曲板27、ハウジング41(後述)に取り付けられたアンビル33と湾曲板39、及び、スクリーン(篩部材)40が破砕ロータ32を包囲するように設けられており、これら湾曲板27、アンビル33、湾曲板39、スクリーン40等によって破砕ロータ32周りに破砕片が周回する円筒状の空間である上記破砕室31が概ね画定されている。
【0029】
破砕ロータ32は、破砕装置12の側面フレーム19、又は本体フレーム30上に設けた図示しない支持部材等に設けた軸受(図示せず)に回転自在に支持されており、その外周部には、複数の支持部材34と、各支持部材34の正転方向前面側にボルト等(図示せず)で取り付けられた破砕ビット(衝突板、或いは破砕刃等)35とを備えている。破砕ビット35は、破砕ロータ32が正転方向に回転する際に、その刃面が支持部材34に先行するように配置されており、この刃面により被破砕物を打撃する。なお、図3においては、1組の破砕ビット35及び支持部材34を代表して示す。
【0030】
ハウジング41は、前出の押圧ローラ装置13の回動軸22の上方にて側面フレーム19に設けられた図示しない軸受に支持された回動軸42を支点に前後方向に回動可能に支持されており、油圧シリンダ50により回動駆動される。そして、このハウジング41の破砕室31側にアンビル33及び湾曲板39が配置されている。
【0031】
アンビル33は、ハウジング41における上記湾曲板39の取り付け部よりも破砕ロータ32の正転方向上流側(以下、上流側と称する)に支持部材51を介して取り付けられており、破砕室31に導入された被破砕物が衝突する衝突面が破砕ロータ32の回転に伴って破砕室31内を周回する破砕片(被破砕物)に対向するように配置されている。支持部材51及びアンビル33は、図示しないボルト等でハウジング41に取り付けられている。
【0032】
ハウジング41の前端部は、破砕機側面カバー19に固定した支持部材48にシアピン49を介して連結されており、破砕作業時には、アンビル33が破砕室31に臨む姿勢で固定、保持されている。ハウジング41を破砕姿勢とした状態での破砕処理(以下、通常破砕処理と称する)中に、アンビル33に過大な負荷が作用してシアピン98にも許容を超える負荷がかかった場合には、シアピン98が破断してハウジング41の拘束が解かれ、アンビル33が破砕室31から退避するようにハウジング41が回動軸42を中心に回動することにより、各部の損傷が防止される。なお、このときのハウジング41の回動退避は図示しないリミットスイッチ等により検出されるようになっており、回動退避の検出時の検出信号はコントローラに送られ、破砕ロータ32の駆動装置を停止させる指令信号が出力されるようになっている。
【0033】
スクリーン40は、ハウジング41が破砕姿勢である場合の湾曲板39の破砕物流通方向下流側、かつ破砕ロータ32の径方向外側に設けられ、破砕ロータ32と同心の円にほぼ沿って湾曲している。また、スクリーン40は、破砕ロータ32に対向する内径面から反対面に貫通し、破砕物を破砕機外に排出する複数の排出孔(図示せず)を有している。この図示しない排出孔の孔径より小さくなった破砕物が破砕機外に排出される。
【0034】
破砕ロータ32の下方には、スクリーン40を破砕ロータ32の外周側位置に保持する枠型のスクリーン支持部材(スクリーンホルダ)63が設けられている。このスクリーン支持部材63は、後端部が回動軸64を介して側面フレーム19、又は本体フレーム30上に設けた図示しない支持部材等に固定され、回動軸64を中心に上下方向に回動する構成となっており、前端部に設けられたリンク機構69により破砕ロータ32に対して進退駆動される。
【0035】
リンク機構69は、ボトム側端部を側面カバー19に回動可能に連結された油圧シリンダ66の伸縮動作をスクリーン支持部材63の破砕ロータ32に対する進退動作に変換するものであり、油圧シリンダ66のロッド側端部に設けられ、油圧シリンダ66の伸縮方向に沿って移動するスライドリンク70と、一方側端部(図2中上側端部)を上記スクリーン支持部材63の周方向他方側端部(図2中右側端部)に回動可能に連結され、他方側端部(図2中下側端部)をピン71を介してスライドリンク70と回動自在に連結された保持リンク72とを備えている。また、73は上記スライドリンク70の移動方向をガイドすると共に、スライドリンク70が保持リンク72から受ける縦荷重を支持するガイド部材である。
【0036】
破砕作業時には、油圧シリンダ66が伸長してリンク機構69のスライドリンク70と保持リンク72とがほぼ直角に折れ曲がった状態となり、スクリーン支持部材63が破砕ロータ32に最も近づいた位置に位置する状態となる。この状態から油圧シリンダ66が縮短するにつれてスライドリンク70と保持リンク72とが回動して徐々に開き、スクリーン支持部材63が徐々に破砕ロータ32から離間する方向に移動する(下降する)。そして、油圧シリンダ66が最も縮短した状態になると、スライドリンク70と保持リンク72とがほぼ伸びきった状態となり、スクリーン支持部材63が破砕ロータ32から最も遠い位置に位置する状態となる。このように、リンク機構69によってスクリーン支持部材63が回動軸64を中心に下方へ回動下降されると、側面フレーム19の下部に形成した切り欠き部(図示せず)からスクリーン支持部材63に載置されたスクリーン40を側方に引き抜くことができ、容易にスクリーン40を交換することができる。
【0037】
排出コンベヤ3は、排出側(前方側)寄りの部分において、動力装置4から突出して設けた支持部材75に支持されており、その反対側(後方側)部分が本体フレーム30に支持されている。これにより、排出コンベヤ3は、破砕装置12の下方から動力装置4の下方を通され、動力装置4の下方から破砕機前方側外方へ上り傾斜となるように配置されている。排出コンベヤ3は、長手方向(前後方向)両端に設けた駆動輪と従動輪(共に図示せず)との間に巻回したコンベヤベルト(図示せず)上に設けたコンベヤカバー78を備えている。また、排出コンベヤ3の駆動輪(図示せず)は、軸受の幅方向外側に設けた駆動装置(排出コンベヤ用油圧モータ)79の出力軸にカップリング等を介して連結されており、この駆動装置79を回転駆動させることにより、駆動輪及び従動輪の間でコンベヤベルトを循環駆動させるようになっている。また、排出コンベヤ3の搬送経路上には磁選機(図示せず)が設けられており、運搬の途中で破砕物に混入している釘や鉄片等の金属を吸着して取り除き最終的に搬出するようになっている。
【0038】
動力装置4は、本体フレーム30の長手方向前方側の端部上に搭載されており、その下方側面には、木材破砕機の走行や破砕処理に関する操作・設定、モニタリング等を行うための操作盤83と、無線操作装置84(後述)等が収納された収納ボックス85とが設けられている。また、動力装置4の上方には、機体の各種状態をオペレータに報知するためのパトライト86が設けられている。
【0039】
図4は、操作盤の扉開放時の外観構造を示す図であり、図5は無線操作装置の外観構造を示す図である。
【0040】
図4に示すように、操作盤83には、表示部83A、入力部83B、緊急停止スイッチ83C、作動装置類の起動停止指示部83D、供給・破砕動作操作部83E、メインスイッチ83F、運転モード選択スイッチ83G、操作手段の選択スイッチ83H、警報ボタン83I、照明ボタン83J、エンジン回転数設定スイッチ83K、連動運転操作部83L等が備えられている。
【0041】
表示部83Aは、機体の稼動状況や各種データ、案内、メッセージ等を表示するもので、タッチパネル機能等によって各種入力操作も可能である。この表示部83Aに表示するメッセージとしては、エンジン93をアイドル回転数に制御するエンジンアイドル制御中のメッセージ(後の図7参照)等がある。入力部83Bは、表示部83Aに表示された設定画面等においてカーソルの移動や選択・決定、ヘルプ画面の呼び出し等を行う。
【0042】
緊急停止スイッチ83Cは、緊急時に機体の各作動装置を即時的に停止させるスイッチである。メインスイッチ83Fは、電気系統のON/OFFやエンジンの始動等を操作する。運転モード選択スイッチ83Gは、走行操作を行う走行モード、破砕作業を行う作業モード、メンテナンスに設定するメンテナンスモードのいずれかを選択する。選択スイッチ83Hは、操作手段として当該操作盤83とリモコン(不図示)のいずれかを有効とするかを設定する。警報ボタン83Iは警報音を鳴らす指示を、照明ボタン83Jは照明の光量設定や消灯の指示をする。エンジン回転数設定スイッチ83Kは、エンジンの回転数をダイヤルの回転により設定する。
【0043】
起動停止指示部83Dには、送りコンベヤ11の停止・正転方向起動・逆転方向起動を各指示する停止ボタン83Da1・正転起動ボタン83Da2・逆転起動ボタン83Da3、押圧ローラ装置13の停止・正転方向起動・逆転方向起動を各指示する停止ボタン83Db1・正転起動ボタン83Db2・逆転起動ボタン83Db3、破砕ロータ15の停止・正転方向起動・逆転方向起動を各指示する停止ボタン83Dc1・正転起動ボタン83Dc2・逆転起動ボタン83Dc3、排出コンベヤ3の起動・停止を各指示する起動ボタン83Dd1・停止ボタン83Dd2が配置されている。
【0044】
また、供給・破砕動作操作部83Eには、フィーダ(送りコンベヤ11及び押圧ローラ装置13)の正転方向の動作速度の調整用のフィーダ速度調整ダイヤル(フィーダ速度調整手段)83Ea、破砕ロータ15の正転方向の回転速度の調整用の破砕ロータ速度調整ダイヤル83Eb、押圧ローラ装置13を上げ下げする油圧シリンダ28のロック/フリーの切り換え等を行うためのシリンダ動作切換スイッチ83Ecが配置されている。
【0045】
図5に示すように、無線操作装置84には、無線操作装置84の電源の入/切を各指示する電源入ボタン84A・電源切ボタン84B、フィーダ(送りコンベヤ11及び押圧ローラ装置13)の正転方向起動・逆転方向起動・停止を各指示する正転起動ボタン84C・逆転起動ボタン84D・停止ボタン84E、押圧ローラ装置13の上げ下げを各指示する上昇ボタン84F・押圧ボタン84G、無線操作装置84の各ボタン84A〜84Gの役割の切り換えを行うためのボタン操作切換ボタン84H、自走式木材破砕機のエンジンを含む全機能の停止を指示する全停止ボタン84Iが配置されている。
【0046】
ボタン操作切換ボタン84Hの操作により、電源入ボタン84Aは警報ボタン、正転起動ボタン84C・逆転起動ボタン84Dは走行体右側履帯の前進ボタン・後進ボタン、上昇ボタン84F・押圧ボタン84Gは走行体左側履帯の前進ボタン・後進ボタンの機能にそれぞれ切り換えられる。
【0047】
図6は、本実施の形態の自走式木材破砕機に備えられた制御装置の機能ブロック図である。
【0048】
図6において、制御装置90は、操作盤83や無線操作装置84からボタンやスイッチなどの操作により出力された指示信号が入力される入力回路90aと、入力回路90aに入力された指示信号に基づいて各種演算を行うCPU90bと、CPU90bでの演算結果を指示信号として、油圧ポンプ94から送りコンベヤ11や押圧ローラ装置13の押えローラ24の駆動装置(図示せず)に供給される圧油の流れを制御する各電磁弁(図示せず)を有する電磁弁群92に出力する出力回路90cと、エンジンコントローラ91等の他の制御系との信号の授受を行うための通信回路90dとを備えている。なお、図示しないが、CPU90bは各種情報の記憶などの各種機能も有している。
【0049】
エンジンコントローラ91は、入力回路91a、CPU91b、出力回路91c、及び、通信回路91dを有している。エンジンコントローラ91は、制御装置90からのエンジン回転数に関する指示信号を受信すると、その指示信号に基づいてエンジン93に設けられたインジェクタ93aの制御信号を生成し、エンジン93での燃料噴射量を調整することにより、エンジン回転数を制御する。
【0050】
図8は、フィーダ停止時の制御装置によるエンジン回転数制御を示す処理フローである。
【0051】
図8において、制御装置90は、まず、オペレータにより操作盤83又は無線操作装置94からフィーダ停止指示信号(操作盤83では、停止ボタンDa1操作時の送りコンベヤ停止指示信号)が入力されると(ステップS10)、フィーダの駆動装置への圧油を制御してフィーダを停止するよう電磁弁群92にフィーダ停止指示信号を出力し(ステップS20)、操作後経過時間tのカウントを開始する(ステップS30)。そして、操作後経過時間tが予め定めた基準時間t0よりも長いかどうかを判定し(ステップS40)、判定結果がYESの場合は、エンジン93の回転数を予め定めたアイドル回転数に制御する指示信号をエンジンコントローラ91に出力してエンジンアイドル制御を行い(ステップS50)、操作盤83の表示部83Aへのメッセージ(図7参照)の表示やパトライト86の点灯などによりエンジンアイドル制御中であることをオペレータに報知し(ステップS60)、処理を終了する。また、ステップS40での判定結果がNOの場合は、操作盤83又は無線操作装置94によりフィーダ正転指示信号(操作盤83では、正転起動ボタン83Da2操作時の送りコンベヤ正転起動指示信号)が入力されたかどうかを判定し(ステップS41)、判定結果がYESの場合は、フィーダの駆動装置への圧油を制御してフィーダを正転駆動するよう電磁弁群92に指示信号を出力し(ステップS42)、処理を終了する。また、ステップS41での判定結果がNOの場合は、ステップS40での判定結果がYESになるまで、ステップS30,S41の処理を繰り返す。
【0052】
以上のように構成した本実施の形態における動作を説明する。
【0053】
操作盤83又は無線操作装置84を操作して、送りコンベヤ11、押圧ローラ装置13、破砕ロータ32、及び、排出コンベヤ3を駆動した状態で、グラップル等の適宜の作業具を備えた重機(油圧ショベル等)等によってホッパ10内に被破砕物を投入すると、被破砕物が送りコンベヤ11の搬送ベルト16上に載置され、循環駆動する搬送ベルト16によって破砕装置12に向かって搬送される。被破砕物が押圧ローラ装置13付近まで搬送されると、押えローラ24が被破砕物上に乗り上げ、押えローラ24の自重により被破砕物が送りコンベヤ11の搬送面に押し付けられる格好となる。このようにして押えローラ24は、送りコンベヤ11との間に被破砕物を挟持した状態で、送りコンベヤ11と協働して破砕室31へ被破砕物を導入する。その際、被破砕物は押えローラ24と送りコンベヤ11とに挟持された部分を支点に片持ち梁状に破砕室31内に向かって突出する。
【0054】
破砕室31内に突出した被破砕物には高速回転する破砕ロータ32の破砕ビット35が下方から衝突し、これにより被破砕物が粗破砕される。このように粗破砕されて破砕室31内に跳ね上げられた被破片はアンビル33に衝突し、その衝撃力によりさらに細かく破砕される。破砕片はその後も破砕ロータ32の回転に伴って破砕室31内を周回し破砕ビット35、アンビル33、破砕室31の内壁面等と衝突して破砕される。そして、周回する破砕片のうちスクリーン40の排出孔を通過する大きさに細粒化されたものが順次スクリーン40を通過して破砕室31から排出される。破砕室31から排出された破砕物は、排出コンベヤ3上に落下して排出コンベヤ3によって搬送され機外に排出される。
【0055】
このような自走式木材破砕機において、操作盤83の停止ボタン83Da1を押下することにより、送りコンベヤ11の停止を指示すると、送りコンベヤ11が停止されて破砕装置12への被破砕物の搬送が停止され(図8のステップS10,S20)、その後、予め設定した時間(基準時間t0)が経過すると、エンジンの回転数が予め定めたアイドル回転数に制御される(図8のステップS40,S50)。このとき、操作盤83の表示部83Aへのメッセージ(図7参照)の表示やパトライト86の点灯などによりエンジンアイドル制御中であることをオペレータに報知する(図8のステップS60)。その後、正転起動ボタン83Da2を押下することにより、送りコンベヤ11の正転駆動を指示すると、エンジン93のアイドル回転数での制御が解除されて通常作業時(破砕作業時)の回転数(作業回転数)に制御され、送りコンベヤ11が正転方向に駆動されて、破砕装置12への被破砕物の搬送が開始される。
【0056】
同様に、無線操作装置84の停止ボタン84Eを押下することにより、送りコンベヤ11の停止を指示すると、送りコンベヤ11が停止されて破砕装置12への被破砕物の搬送が停止され(図8のステップS10,S20)、その後、予め設定した時間(基準時間t0)が経過すると、エンジンの回転数が予め定めたアイドル回転数に制御される(図8のステップS40,S50)。このとき、操作盤83の表示部83Aへのメッセージ(図7参照)の表示やパトライト86の点灯などによりエンジンアイドル制御中であることをオペレータに報知する(図8のステップS60)。その後、正転起動ボタン84Cを押下することにより、送りコンベヤ11の正転駆動を指示すると、エンジン93のアイドル回転数での制御が解除されて通常作業時(破砕作業時)の回転数(作業回転数)に制御され、送りコンベヤ11が正転方向に駆動されて、破砕装置12への被破砕物の搬送が開始される。
【0057】
操作盤83の停止ボタン83Da1又は無線操作装置84の停止ボタン84Eの押下後から基準時間t0が経過する前に正転起動ボタン83Da2又は正転起動ボタン84Cを押下すると、送りコンベヤ11が正転方向に駆動されて、破砕装置12への被破砕物の搬送が開始されるとともに、エンジンの回転数が予め定めたアイドル回転数とならず、通常作業時(破砕処理時)の回転数(作業回転数)に維持される。
【0058】
なお、破砕処理中において、万一、破砕ビット35とアンビル33の間に石や金属などの異物が噛み込んだ場合には、破砕ビット35からアンビル33に過大な負荷が加わり、その負荷がハウジング41と支持部材48を連結するシアピン49に伝わる。このように、アンビル33に過大な負荷が作用してシアピン49にも許容を超える負荷がかかった場合には、シアピン49が破断してハウジング41の拘束が解かれ、アンビル33が破砕室31から退避するようにハウジング41が回動軸42を中心に回動する。また、図示しないセンサなどにより、ハウジング41の回動退避を検出すると、木材破砕機は被破砕物の破砕動作、すなわち、被破砕物の搬入(送りコンベヤ11の動作)及び破砕ロータ32の回転等を停止する。
【0059】
以上のように構成した本実施の形態における効果を説明する。
【0060】
従来技術における自走式破砕機は、破砕装置等の各機器が無負荷となる待機時間にエンジン回転数を低下させることによって、エネルギロスの低減や騒音の低減、排気ガス量の低減を図っており、複数の機器のうちの破砕装置を含む所定の機器のうち動作状態にあるものがすべて被破砕物に対し破砕又は破砕作業に関連する作業を行っている実運転状態であるかそのような作業を行っていない空運転状態であるかを検出し、空運転状態であることが検出された場合にエンジンの回転数を予め設定したアイドル回転数に制御するように構成されている。しかしながら、上記従来技術のような自走式処理機において、エンジン回転数がアイドル回転数に制御された状態で被破砕物が投入されると、破砕装置が十分な破砕能力を発揮できない状態で破砕処理を行うことになり、破砕装置の過負荷や処理物の品質のバラツキなどの発生が懸念される。
【0061】
これに対し本実施の形態においては、送りコンベヤ11の停止・正転方向起動・逆転方向起動を各指示するボタン83Da1,83Da2,83Da3や、フィーダ(送りコンベヤ11及び押圧ローラ装置13)の正転方向起動・逆転方向起動・停止を各指示するボタン84C,84D,84Eなどの操作による指示に基づいて、エンジン93の回転数を予め定めたアイドル回転数から予め定めた作業回転数に制御するように構成したので、一旦、エンジン回転数がアイドル回転数に落ちた場合でも、十分な破砕能力を発揮できる状態での破砕処理を行うことができるので、処理物の品質のバラツキを抑制することができる。
【0062】
すなわち、正転起動ボタン83Da2、又は、正転起動ボタン84Cを押下することにより、送りコンベヤ11の正転駆動を指示すると、エンジン93のアイドル回転数での制御が解除されて通常作業時(破砕作業時)の回転数に制御されるように構成し、送りコンベヤ11の正転駆動による破砕装置12への被破砕物の投入前に破砕装置12の破砕ロータ32の回転数が十分に復旧した状態にすることが可能となり、十分な破砕能力を発揮できる状態での破砕処理を行うことができ、処理物の品質のバラツキを抑制することができる。
【0063】
また、従来技術のような自走式処理機においては、実際には空運転状態であっても、その動作状態によっては実運転状態であると判定されることが懸念され、この場合には、エンジン回転数をアイドル回転数に低下させる制御が行われず、エネルギロスの低減や騒音の低減、排気ガス量の低減を図ることができないという問題点もあった。これに対し、本実施の形態においては、操作盤83の停止ボタン83Da1、又は、無線操作装置84の停止ボタン84Eを押下することによる送りコンベヤ11の停止指示以降に、エンジン93の回転数を予め定めたアイドル回転数に制御するように構成したので、より確実にエンジン回転数をアイドル回転数に低下させることができる。
【0064】
<第2の実施の形態>
本発明の第2の実施の形態を図9を参照しつつ説明する。
【0065】
図9は、本実施の形態における制御装置によるフィーダ停止制御を示す処理フローである。図中、第1の実施の形態と同様の構成には同じ符号を付し説明を省略する。
【0066】
図9において、制御装置90は、まず、操作盤83又は無線操作装置94のフィーダ停止ボタン(停止ボタンDa1,84E)の押下によりフィーダ停止指示信号(操作盤83では、停止ボタンDa1操作時の送りコンベヤ停止指示信号)が入力されると(ステップS110)、フィーダの駆動装置への圧油を制御してフィーダを停止するよう電磁弁群92に指示信号を出力し(ステップS120)、フィーダ停止ボタンの連続押下時間tのカウントを開始する(ステップS130)。そして、操作後経過時間tが予め定めた基準時間t1よりも長いかどうかを判定し(ステップS140)、判定結果がYESの場合は、エンジン93の回転数を予め定めたアイドル回転数に制御する指示信号をエンジンコントローラ91に出力してエンジンアイドル制御を行い(ステップS150)、操作盤83の表示部83Aへのメッセージ(図7参照)の表示やパトライト86の点灯などによりエンジンアイドル制御中であることをオペレータに報知し(ステップS160)、処理を終了する。また、ステップS140での判定結果がNOの場合は、操作盤83又は無線操作装置94のフィーダ停止ボタンを離したかどうかを判定し(ステップS141)、判定結果がYESの場合は、処理を終了する。また、ステップS141での判定結果がNOの場合は、ステップS130,S140の処理を繰り返す。
【0067】
その他の構成は、第1の実施の形態と同様である。
【0068】
以上のように構成した本実施の形態においても第1の実施の形態と同様の効果を得ることができる。
【符号の説明】
【0069】
1 走行体
2 破砕機能構成部
3 排出コンベヤ
4 動力装置(パワーユニット)
10 ホッパ
11 送りコンベヤ
12 破砕装置
13 押圧ローラ装置
16 搬送体(搬送ベルト、チェーンベルト)
19 側面フレーム(破砕機フレーム)
24 押えローラ
28 油圧シリンダ
31 破砕室
32 破砕ロータ
33 アンビル(固定刃)
35 破砕ビット
39 湾曲板
40 スクリーン(篩部材)
41 ハウジング
83 操作盤
84 無線操作装置
85 収納ボックス
86 パトライト
【特許請求の範囲】
【請求項1】
エンジンと、
前記エンジンにより駆動される油圧ポンプと、
前記油圧ポンプから供給される圧油により駆動されて被処理物の処理を行う処理装置と、
機体外部からの前記被処理物が投入される投入部から前記処理装置に前記被処理物を搬送する搬送手段と、
前記処理装置からの処理物を機体外部に排出する排出手段と、
前記搬送手段の動作を指示する搬送動作指示手段と、
前記搬送動作指示手段による前記搬送手段の始動指示に連動して、前記エンジンの回転数をアイドル回転数から予め定めた作業回転数に復帰させる制御を行う制御手段と
を備えたことを特徴とする自走式処理機。
【請求項2】
請求項1記載の自走式処理機において、
前記制御手段は、前記搬送動作指示手段による前記搬送手段の停止指示に連動して、前記エンジンの回転数を予め定めたアイドル回転数に制御することを特徴とする自走式処理機。
【請求項3】
請求項2記載の自走式処理機において、
前記制御手段は、前記搬送動作指示手段による前記搬送手段の停止指示から予め定めた時間が経過すると、前記エンジンの回転数を予め定めたアイドル回転数に制御することを特徴とする自走式処理機。
【請求項4】
請求項2記載の自走式処理機において、
前記制御手段は、前記搬送動作指示手段を長押しすることにより前記搬送手段の停止指示信号が予め定めた時間発せられると、前記エンジンの回転数を予め定めたアイドル回転数に制御することを特徴とする自走式処理機。
【請求項1】
エンジンと、
前記エンジンにより駆動される油圧ポンプと、
前記油圧ポンプから供給される圧油により駆動されて被処理物の処理を行う処理装置と、
機体外部からの前記被処理物が投入される投入部から前記処理装置に前記被処理物を搬送する搬送手段と、
前記処理装置からの処理物を機体外部に排出する排出手段と、
前記搬送手段の動作を指示する搬送動作指示手段と、
前記搬送動作指示手段による前記搬送手段の始動指示に連動して、前記エンジンの回転数をアイドル回転数から予め定めた作業回転数に復帰させる制御を行う制御手段と
を備えたことを特徴とする自走式処理機。
【請求項2】
請求項1記載の自走式処理機において、
前記制御手段は、前記搬送動作指示手段による前記搬送手段の停止指示に連動して、前記エンジンの回転数を予め定めたアイドル回転数に制御することを特徴とする自走式処理機。
【請求項3】
請求項2記載の自走式処理機において、
前記制御手段は、前記搬送動作指示手段による前記搬送手段の停止指示から予め定めた時間が経過すると、前記エンジンの回転数を予め定めたアイドル回転数に制御することを特徴とする自走式処理機。
【請求項4】
請求項2記載の自走式処理機において、
前記制御手段は、前記搬送動作指示手段を長押しすることにより前記搬送手段の停止指示信号が予め定めた時間発せられると、前記エンジンの回転数を予め定めたアイドル回転数に制御することを特徴とする自走式処理機。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】

【図7】

【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−66862(P2013−66862A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2011−208123(P2011−208123)
【出願日】平成23年9月22日(2011.9.22)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.パトライト
【出願人】(000005522)日立建機株式会社 (2,611)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成23年9月22日(2011.9.22)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.パトライト
【出願人】(000005522)日立建機株式会社 (2,611)
【Fターム(参考)】
[ Back to top ]