
自走式台車移動機
【課題】人力に頼ることなくリフトアップした鉄道車両から取り外した台車を台車検修場まで牽引するのに適した自走式台車移動機を提案すること。
【解決手段】自走式台車移動機1は、左駆動輪5、右駆動輪7を個別に駆動可能な左右2系統の車輪駆動機構と、これらを駆動するための左右の2系統のバッテリユニット22、23を備えている。バッテリユニット22、23は12Vの汎用バッテリを複数台直列接続したものであり、多重ブースタ31、32によってモータ駆動電力まで昇圧している。左右の2系統の車輪駆動機構、駆動電源を備えているので、一方に故障、不具合が発生した場合であっても、他方を用いて自走式台車移動機1による台車移動作業を継続でき、作業の安全性、作業効率を高めることができる。汎用バッテリを用いることにより製造コスト、メンテナンスコストを低減できる。
【解決手段】自走式台車移動機1は、左駆動輪5、右駆動輪7を個別に駆動可能な左右2系統の車輪駆動機構と、これらを駆動するための左右の2系統のバッテリユニット22、23を備えている。バッテリユニット22、23は12Vの汎用バッテリを複数台直列接続したものであり、多重ブースタ31、32によってモータ駆動電力まで昇圧している。左右の2系統の車輪駆動機構、駆動電源を備えているので、一方に故障、不具合が発生した場合であっても、他方を用いて自走式台車移動機1による台車移動作業を継続でき、作業の安全性、作業効率を高めることができる。汎用バッテリを用いることにより製造コスト、メンテナンスコストを低減できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、リフトアップした鉄道車両から取り外した台車を所定の検修場まで牽引するために用いるバッテリ搭載型の自走式台車移動機に関する。
【背景技術】
【0002】
鉄道車両の車両基地において鉄道車両の保守などを行う場合には、鉄道車両をリフトアップし、その車体の底から台車を取り外し、取り外した台車を車両の下から移動した後に、取り外した台車の代わりに車体搬送用仮台車を車体の下に配置し、当該車体搬送用仮台車に車体を載せて車体検修場まで移動させるようにしている。このような車体搬送用仮台車は特許文献1に開示されている。
【0003】
これに対して車体から取り外した台車を台車研修場まで移動させる作業は人手に頼って行っている。すなわち、鉄道車両をリフトアップしてその車体の底から取り外した台車を、ローラーコンベヤを用いて台車検修場まで人手により移動している。あるいは、取り外した台車を人力によって軌道レールに沿って台車検修場まで移動している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平05−131901号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
台車の移動作業は、リフトアップした鉄道車両の車体から取り外した台車を車体の下から取り出す作業なので危険が伴う。また、各車両から取り外した複数台の台車を台車検修場まで移動する必要があるので重労働であり、作業効率も悪い。
【0006】
本発明の課題は、この点に鑑みて、人力に頼ることなく安全に、リフトアップした鉄道車両から取り外した台車を台車検修場まで牽引するのに適した自走式台車移動機を提案することにある。
【課題を解決するための手段】
【0007】
上記の課題を解決するために、本発明は、
リフトアップした鉄道車両の車体から取り外された台車を軌道レールに沿って台車検修場まで牽引するために用いる自走式台車移動機であって、
車体フレームと、
車体フレームの前側あるいは後側の部位に、それぞれの駆動軸が回転自在の状態で支持されている左駆動輪および右駆動輪と、
車体フレームの後側あるいは前側に配置された左従動輪および右従動輪と、
左駆動輪および右駆動輪を個別に回転駆動可能な2系統の車輪駆動機構と、
2系統の車輪駆動機構のそれぞれの駆動電源として用いるために車体フレームに搭載されている2系統のバッテリ電源とを有していることを特徴としている。
【0008】
ここで、2系統の車輪駆動機構の駆動源として、左駆動輪を回転駆動するために車体フレームに搭載されている第1のギヤ付きモータ、および、右駆動輪を回転駆動するために車体フレームに搭載されている第2のギヤ付きモータを用いることができる。
【0009】
また、2系統のバッテリ電源として、第1のギヤ付きモータの駆動電源として用いる複数個の12Vバッテリが直列接続された構成の第1のバッテリユニットと、第2のギヤ付きモータの駆動電源として用いる複数個の12Vバッテリが直列接続された構成の第2のバッテリユニットを用いることができる。汎用の12Vバッテリを用いることにより、自走式台車移動機の製造コストを下げることができ、バッテリ電源の保守、バッテリ交換などを廉価に行うことができる。
【0010】
汎用の12Vバッテリを用いる場合には、多重ブースタを用いて、モータの駆動電力として要求される電圧までバッテリ電圧を上げるようにすればよい。このようにすれば、直列接続する12Vバッテリの個数を減らすことができ、バッテリ設置スペースが少なくて済むので、自走式台車移動機の小型化、低コスト化に有利である。
【0011】
また、故障時、保守点検時などにおける部品の取り外し作業を簡単に行うことができるようにするために、左駆動輪の駆動軸および右駆動輪の駆動軸は、それぞれ、車体フレームに対して締結ボルトを用いて着脱可能に取り付けられている左ベアリングボックスおよび右ベアリングボックスによって回転自在の状態で支持されていることが望ましい。このようにすれば、左右の駆動輪の取り外し、取り付けを簡単に行うことができる。
【0012】
一方、台車の牽引作業を安全に行うためには、車体フレームに搭載されている操作盤と、遠隔操縦用のリモートコントローラと、操作盤およびリモートコントローラからの操縦指令に基づき、左駆動輪および右駆動輪の回転駆動制御を行うために車体フレームに搭載されている制御盤とを有していることが望ましい。
【0013】
リモートコントローラによって遠隔操縦を行うことができるようにしておけば、リフトアップした鉄道車両の車体から取り外した台車を自走式台車移動機に連結した後は、リモートコントローラによって自走式台車移動機をリフトアップされた鉄道車両の下から外れた位置まで移動させることができ、作業員がリフトアップ状態の車体に下において台車の移動作業を行う必要がないので安全である。台車が車体の下から外れた位置まで移動した後は、作業員が自走式台車移動機に載って操作盤を操作することにより、遠隔操縦を行う場合よりも自走式台車移動機を円滑かつ安全に操縦できる。
【発明の効果】
【0014】
本発明の自走式台車移動機は、左右の2系統のバッテリ電源と、左右の2系統の車輪駆動機構を備えている。したがって、一方の電源系統あるいは車輪駆動機構に故障、不具合が発生した場合であっても、他方のバッテリ電源および車輪駆動機構を用いて一つの駆動輪を回転駆動させることができる。よって、一方の系統が故障あるいは不具合が発生した場合でも他方の系統を用いて台車移動作業を継続して行うことができるので、作業の安全性および作業効率を高めることができる。
【図面の簡単な説明】
【0015】
【図1】本発明の実施の形態に係る自走式台車移動機を示す平面図および側面図であり、モータ台車を牽引している状態を示す。
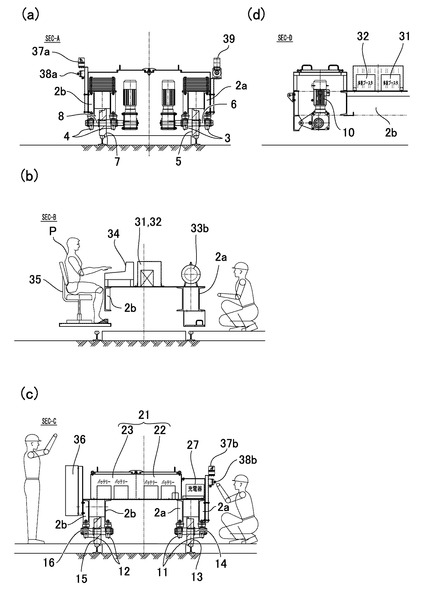
【図2】自走式台車移動機を図1の位置Aで切断した場合の断面構成図、位置Bで切断した場合の断面構成図、位置Cで切断した場合の断面構成図、および、位置Dで切断した場合の断面構成図である。
【図3】自動式台車移動機の左駆動輪の部分を示す正面図、側面図および底面図である。
【図4】自走式台車移動機の左従動輪の部分を示す正面図および側面図である。
【図5】自走式台車移動機の制御系を示す概略ブロック図である。
【発明を実施するための形態】
【0016】
以下に、図面を参照して本発明を適用した自走式台車移動機の実施の形態を説明する。本実施の形態に係る自走式台車移動機は、新幹線車両から取り外したモータ台車を牽引して台車検修場に移動させる台車移動作業に用いるのに適している。
【0017】
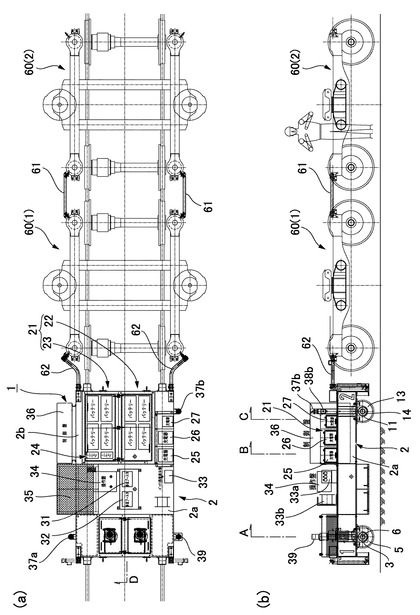
図1(a)、(b)は自走式台車移動機の平面図および側面図であり、図2(a)〜(d)は図1の位置A〜Dで切断した部分の断面構成を示す説明図である。これらの図を参照して説明すると、自走式台車移動機1は前後方向に長い矩形枠状の車体フレーム2を備えており、車体フレーム2のフレーム左側枠2aおよびフレーム右側枠2bにおける前側の部位の下面には、それぞれ、一対の左ベアリングボックス3および一対の右ベアリングボックス4が取り付けられている。例えば、これらのベアリングボックス3、4はプランマーブロックである。左ベアリングボックス3によって左駆動輪5(鉄輪)の駆動軸6が回転自在の状態で支持されており、右ベアリングボックス4によって右駆動輪7(鉄輪)の駆動軸8が回転自在の状態で支持されている。
【0018】
左駆動輪5の駆動軸6の車幅方向の内側には、ギヤ付きACモータ9が下向き姿勢で垂直に配置されており、駆動軸6の内側の軸端がギヤ付きACモータ9の出力軸(図示せず)に連結されている。同様に、右駆動輪7の駆動軸8の車幅方向の内側には、ギヤ付きACモータ10が下向き姿勢で垂直に配置されており、駆動軸8の内側の軸端がギヤ付きACモータ10の出力軸(図示せず)に連結されている。
【0019】
このように、自走式台車移動機1には、左右の2系統の車輪駆動機構が搭載されている。すなわち、左側の系統の車輪駆動機構は、左ベアリングボックス3、左駆動輪5、駆動軸6、ギヤ付きACモータ9から構成されており、右側の系統の車輪駆動機構は、右ベアリングボックス4、右駆動輪7、駆動軸8、ギヤ付きACモータ10から構成されている。したがって、一方の車輪駆動機構が故障し、あるいは構成部品に不具合が発生した場合においても、他方の車輪駆動機構を用いて新幹線車両から取り外したモータ台車を牽引して台車検修場に搬送する作業を中断することなく行うことができる。
【0020】
また、リフトアップした新幹線車両の下において自走式台車移動機1が故障により立ち往生してしまい、その撤去作業をリフトアップ状態の新幹線車両の下で行うという危険を伴う作業も不要になるので作業の安全性を確保できる。さらに、故障あるいは不具合の発生した側の部品のみを交換あるいは修理すればよいので、部品交換作業、修理作業を簡単に行うことができ、メンテナンス費用も低く抑えることができる。
【0021】
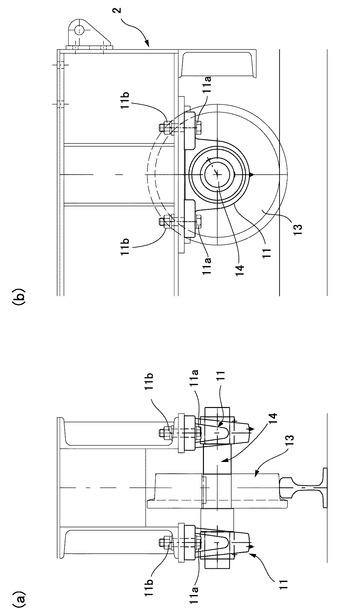
次に、車体フレーム2のフレーム左側枠2a、右側枠2bの後側の部位の下面にも、それぞれ、一対の左ベアリングボックス11および一対の右ベアリングボックス12が取り付けられている。左ベアリングボックス11によって左従動輪13(鉄輪)の車軸14が回転自在状態で支持されており、右ベアリングボックス12によって右従動輪15(鉄輪)の車軸16が回転自在の状態で支持されている。
【0022】
一方、図1から分かるように、車体フレーム2には、その後側の部位に、2系統の車輪駆動機構のそれぞれの駆動電源として用いるための2系統のバッテリ電源21が搭載されている。2系統のバッテリ電源21は、左側のギヤ付きACモータ9の駆動電源として用いるバッテリユニット22と、右側のギヤ付きACモータ10の駆動電源として用いるバッテリユニット23を備えている。それぞれのバッテリユニット22、23は、汎用の12V鉛バッテリを直列に複数台、本例では4台接続した48Vの駆動電源である。鉛バッテリの代わりにリチウムイオンバッテリ等を用いることもできる。
【0023】
本例では、この2系統の駆動用のバッテリ電源21に加えて、更に一系統の制御用バッテリ電源24が搭載されている。この制御用バッテリ電源24は2個の汎用12Vバッテリから構成されている。また、車体フレーム2におけるバッテリ電源21の左側の端には、それぞれの系統のバッテリユニットを充電するための3台の充電器25、26、27が搭載されている。
【0024】
車体フレーム2におけるバッテリ電源21の前側の部位には、図1および図2(b)に示すように、その中央部分にバッテリ電源昇圧用の2台の多重ブースタ31、32が搭載されている。これらの左側には各系統のバッテリ残量を表示するためのバッテリ残量表示器33aおよび充電器用コードリール33bが搭載されている。
【0025】
次に、車体フレーム2におけるバッテリ電源21の右側の部位には、操作盤34および運転席35が配置されている。運転席35の後側の部位、すなわち、バッテリ電源21の右側には各部の制御を司る制御盤36が搭載されている。また、車体フレーム2のフレーム右側枠2bの前端側の部位には図1、図2(a)に示すように、パトライト37aおよび非常停止ボタン38aが配置されている。同様に、フレーム左側枠2aの後端側の部位には図1、図2(c)に示すように、パトライト37bおよび非常停止ボタン38bが配置されている。さらに、フレーム左側枠2aの前端側の部位には図1、図2(a)に示すように、赤、緑に点灯切替可能な信号灯39が取り付けられている。
【0026】
次に、図3は左駆動輪5の部分を示す正面図、側面図および底面図である。故障時、保守点検時などにおいて、車体フレーム2から部品を取り外す作業を簡単に行うことができるようにすることが望ましい。このために、左駆動輪5の駆動軸6を回転自在の状態で支持している一対の左ベアリングボックス3は、それぞれ、車体フレーム2に対して前後2本の締結ボルト41およびナット42を用いて着脱可能に取り付けられている。駆動軸6の内側の軸端部は、ギヤ付きACモータ9の側のギヤボックス9a内の出力軸9bに同軸状態に連結固定されている。ギヤボックス9aは、ボルト・ナットによって、取り付け用ブラケット9cを介して車体フレーム2の側に着脱可能な状態で連結されている。したがって、左駆動輪5、駆動軸6、左ベアリングボックス3およびギヤ付きACモータ9からなるユニットを、車体フレーム2から簡単に取り外すことができる。右駆動輪7の側も同様に構成されており、その取り外しが簡単である。
【0027】
また、図4に示す正面図および側面図から分かるように、左従動輪13の一対の左ベアリングボックス11も前後2本のボルト・ナット11a、11bによって着脱可能な状態で車体フレーム2に取り付けられている。右従動輪15の部分も同様に構成されている。このように、左右の駆動輪5、7の部分、左右の従動輪13、15の部分の取り外し、取り付けを簡単に行うことができるので便利である。また、部品交換時における取り外し部品の部品点数を減らすことができ、部品交換作業を効率良く行うことができ、費用も低く抑えることができる。
【0028】
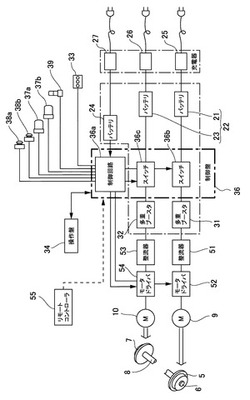
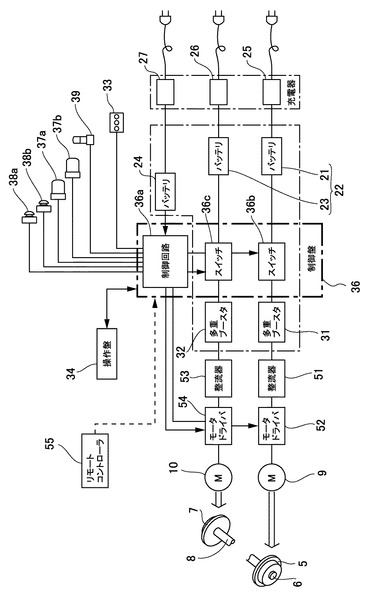
次に、図5は自走式台車移動機1の制御系を示す概略ブロック図である。この図に示すように、左右の車輪駆動機構を駆動するための2系統の駆動電力源および駆動制御系を備えている。すなわち、左右の車輪駆動機構を駆動するための駆動電力源として、バッテリユニット22、23を備えており、ここから出力される2系統の48Vの直流電流の供給制御が、制御盤36の制御回路36aによって切り替え制御される電力供給制御用のスイッチ36b、36cによって行われる。
【0029】
左側の駆動制御系では、48Vの直流電流が制御盤36のスイッチ36bを介して多重ブースタ31に供給されて、ギヤ付きACモータ10の駆動電圧である288Vまで昇圧される。多重ブースタ31としては、例えば、株式会社ニプロン製の多重ブースタ方式DC−DC昇圧コンバータを用いることができる。昇圧後の直流電流はDC−ACコンバータ、例えばシリコン整流器51を介して交流電流に変換された後にモータドライバ52に供給される。モータドライバ52は制御盤36の制御の下でギヤ付きACモータ9を駆動する。ギヤ付きACモータ9によって左駆動輪5が回転駆動される。
【0030】
同様に、右側の車輪駆動機構を駆動するための駆動電力源はバッテリ電源21のバッテリユニット23を備えており、ここから出力される48Vの直流電流の供給制御が制御盤36によって行われる。右側の駆動制御系では、48Vの直流電流は制御盤36のスイッチ36cを介して多重ブースタ32に供給されて、ギヤ付きACモータ10の駆動電圧である288Vまで昇圧される。昇圧後の直流電流はDC−ACコンバータ、例えばシリコン整流器53を介して交流電流に変換された後にモータドライバ54に供給される。モータドライバ54は制御盤36の制御の下でギヤ付きACモータ10を駆動する。ギヤ付きACモータ10によって右駆動輪7が回転駆動される。
【0031】
このように、本例では、駆動電力源として、12Vの汎用バッテリを直列接続した構成のバッテリユニット22、23を用いており、これを多重ブースタ31、32によってモータ駆動電力まで昇圧している。汎用の12Vバッテリを用いることにより、自走式台車移動機1の製造コストを下げることができ、バッテリ電源21の保守、バッテリ交換などを廉価に行うことができる。
【0032】
また、多重ブースタ31、32を用いて、ACモータの駆動電力として要求される電圧までバッテリ電圧を上げているので、直列接続する12Vバッテリの個数を減らすことができる。したがって、バッテリ交換時の部品点数が少なくて済むのでバッテリ交換費用を低く抑えることができる。また、バッテリ設置スペースが少なくて済むので、自走式台車移動機1の小型化、低コスト化に有利である。
【0033】
さらに、2系統の駆動電源および駆動制御系を備えているので、一方の系に故障あるいは不具合が発生した場合においても正常な系を用いて自走式台車移動機1を移動させることができる。よって、自走式台車移動機1がリフトアップした新幹線車両の下に立ち往生してしまった場合などにおいて作業員が危険な状態で回復作業を行う必要がない。また、故障あるいは不具合の発生した側の部品のみを交換すればよいので、部品交換作業が容易であり、メンテナンス費用も低く抑えることができる。
【0034】
ここで、モータ台車の牽引作業を安全に行うためには、車体フレーム2に搭載されている操作盤34に加えて、遠隔操縦用のリモートコントローラ55を備えていることが望ましい。この場合には、制御盤36は、操作盤34およびリモートコントローラ55からの操縦指令に基づき、左駆動輪5および右駆動輪7の回転駆動制御を行う。
【0035】
この場合のモータ台車の牽引作業は次のように行うことができる。まず、図1に示すように、リフトアップした新幹線車両の車体(図示せず)から取り外したモータ台車60(1)、60(2)・・・を相互に連結材61で連結すると共に、先頭のモータ台車60(1)を連結材62で自走式台車移動機1に連結する。
【0036】
この後は、リモートコントローラ55(図5参照)による遠隔操作によって、自走式台車移動機1をリフトアップした新幹線車両の車体の下から外れた位置まで移動させる。このようにすれば、作業員がリフトアップ状態の車体に下において自走式台車移動機1を操縦してモータ台車60(1)、60(2)・・・の移動作業を行う必要がないので安全である。次に、自走式台車移動機1およびモータ台車60(1)、60(2)・・・が車体の下から外れた位置まで移動した後は、図2(b)に示すように作業員Pが自走式台車移動機1の運転席35に座って操作盤34を操作することにより、遠隔操縦を行う場合よりも自走式台車移動機1を円滑かつ安全に操縦して、台車検修場まで牽引することができる。
【符号の説明】
【0037】
1 自走式台車移動機
2 車体フレーム
2a フレーム左側枠
2b フレーム右側枠
3 左ベアリングボックス
4 右ベアリングボックス
5 左駆動輪
6 駆動軸
7 右駆動輪
8 駆動軸
9、10 ギヤ付きACモータ
9a ギヤボックス
9b 出力軸
9c 取付け用ブラケット
11 左ベアリングボックス
11a 締結ボルト
11b ナット
12 右ベアリングボックス
13 左従動輪
14 車軸
15 右従動輪
16 車軸
21 バッテリ電源
22、23 バッテリユニット
24 制御用バッテリ電源
25、26、27 充電器
31、32 多重ブースタ
33 バッテリ残量表示器
34 操作盤
35 運転席
36 制御盤
36a 制御回路
36b、36c スイッチ
37a、37b パトライト
38a、38b 非常停止ボタン
39 信号灯
41 締結ボルト
42 ナット
51、53 シリコン整流器
52、54 モータドライバ
55 リモートコントローラ
60(1)、60(2) モータ台車
61、62 連結材
P 作業員
【技術分野】
【0001】
本発明は、リフトアップした鉄道車両から取り外した台車を所定の検修場まで牽引するために用いるバッテリ搭載型の自走式台車移動機に関する。
【背景技術】
【0002】
鉄道車両の車両基地において鉄道車両の保守などを行う場合には、鉄道車両をリフトアップし、その車体の底から台車を取り外し、取り外した台車を車両の下から移動した後に、取り外した台車の代わりに車体搬送用仮台車を車体の下に配置し、当該車体搬送用仮台車に車体を載せて車体検修場まで移動させるようにしている。このような車体搬送用仮台車は特許文献1に開示されている。
【0003】
これに対して車体から取り外した台車を台車研修場まで移動させる作業は人手に頼って行っている。すなわち、鉄道車両をリフトアップしてその車体の底から取り外した台車を、ローラーコンベヤを用いて台車検修場まで人手により移動している。あるいは、取り外した台車を人力によって軌道レールに沿って台車検修場まで移動している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平05−131901号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
台車の移動作業は、リフトアップした鉄道車両の車体から取り外した台車を車体の下から取り出す作業なので危険が伴う。また、各車両から取り外した複数台の台車を台車検修場まで移動する必要があるので重労働であり、作業効率も悪い。
【0006】
本発明の課題は、この点に鑑みて、人力に頼ることなく安全に、リフトアップした鉄道車両から取り外した台車を台車検修場まで牽引するのに適した自走式台車移動機を提案することにある。
【課題を解決するための手段】
【0007】
上記の課題を解決するために、本発明は、
リフトアップした鉄道車両の車体から取り外された台車を軌道レールに沿って台車検修場まで牽引するために用いる自走式台車移動機であって、
車体フレームと、
車体フレームの前側あるいは後側の部位に、それぞれの駆動軸が回転自在の状態で支持されている左駆動輪および右駆動輪と、
車体フレームの後側あるいは前側に配置された左従動輪および右従動輪と、
左駆動輪および右駆動輪を個別に回転駆動可能な2系統の車輪駆動機構と、
2系統の車輪駆動機構のそれぞれの駆動電源として用いるために車体フレームに搭載されている2系統のバッテリ電源とを有していることを特徴としている。
【0008】
ここで、2系統の車輪駆動機構の駆動源として、左駆動輪を回転駆動するために車体フレームに搭載されている第1のギヤ付きモータ、および、右駆動輪を回転駆動するために車体フレームに搭載されている第2のギヤ付きモータを用いることができる。
【0009】
また、2系統のバッテリ電源として、第1のギヤ付きモータの駆動電源として用いる複数個の12Vバッテリが直列接続された構成の第1のバッテリユニットと、第2のギヤ付きモータの駆動電源として用いる複数個の12Vバッテリが直列接続された構成の第2のバッテリユニットを用いることができる。汎用の12Vバッテリを用いることにより、自走式台車移動機の製造コストを下げることができ、バッテリ電源の保守、バッテリ交換などを廉価に行うことができる。
【0010】
汎用の12Vバッテリを用いる場合には、多重ブースタを用いて、モータの駆動電力として要求される電圧までバッテリ電圧を上げるようにすればよい。このようにすれば、直列接続する12Vバッテリの個数を減らすことができ、バッテリ設置スペースが少なくて済むので、自走式台車移動機の小型化、低コスト化に有利である。
【0011】
また、故障時、保守点検時などにおける部品の取り外し作業を簡単に行うことができるようにするために、左駆動輪の駆動軸および右駆動輪の駆動軸は、それぞれ、車体フレームに対して締結ボルトを用いて着脱可能に取り付けられている左ベアリングボックスおよび右ベアリングボックスによって回転自在の状態で支持されていることが望ましい。このようにすれば、左右の駆動輪の取り外し、取り付けを簡単に行うことができる。
【0012】
一方、台車の牽引作業を安全に行うためには、車体フレームに搭載されている操作盤と、遠隔操縦用のリモートコントローラと、操作盤およびリモートコントローラからの操縦指令に基づき、左駆動輪および右駆動輪の回転駆動制御を行うために車体フレームに搭載されている制御盤とを有していることが望ましい。
【0013】
リモートコントローラによって遠隔操縦を行うことができるようにしておけば、リフトアップした鉄道車両の車体から取り外した台車を自走式台車移動機に連結した後は、リモートコントローラによって自走式台車移動機をリフトアップされた鉄道車両の下から外れた位置まで移動させることができ、作業員がリフトアップ状態の車体に下において台車の移動作業を行う必要がないので安全である。台車が車体の下から外れた位置まで移動した後は、作業員が自走式台車移動機に載って操作盤を操作することにより、遠隔操縦を行う場合よりも自走式台車移動機を円滑かつ安全に操縦できる。
【発明の効果】
【0014】
本発明の自走式台車移動機は、左右の2系統のバッテリ電源と、左右の2系統の車輪駆動機構を備えている。したがって、一方の電源系統あるいは車輪駆動機構に故障、不具合が発生した場合であっても、他方のバッテリ電源および車輪駆動機構を用いて一つの駆動輪を回転駆動させることができる。よって、一方の系統が故障あるいは不具合が発生した場合でも他方の系統を用いて台車移動作業を継続して行うことができるので、作業の安全性および作業効率を高めることができる。
【図面の簡単な説明】
【0015】
【図1】本発明の実施の形態に係る自走式台車移動機を示す平面図および側面図であり、モータ台車を牽引している状態を示す。
【図2】自走式台車移動機を図1の位置Aで切断した場合の断面構成図、位置Bで切断した場合の断面構成図、位置Cで切断した場合の断面構成図、および、位置Dで切断した場合の断面構成図である。
【図3】自動式台車移動機の左駆動輪の部分を示す正面図、側面図および底面図である。
【図4】自走式台車移動機の左従動輪の部分を示す正面図および側面図である。
【図5】自走式台車移動機の制御系を示す概略ブロック図である。
【発明を実施するための形態】
【0016】
以下に、図面を参照して本発明を適用した自走式台車移動機の実施の形態を説明する。本実施の形態に係る自走式台車移動機は、新幹線車両から取り外したモータ台車を牽引して台車検修場に移動させる台車移動作業に用いるのに適している。
【0017】
図1(a)、(b)は自走式台車移動機の平面図および側面図であり、図2(a)〜(d)は図1の位置A〜Dで切断した部分の断面構成を示す説明図である。これらの図を参照して説明すると、自走式台車移動機1は前後方向に長い矩形枠状の車体フレーム2を備えており、車体フレーム2のフレーム左側枠2aおよびフレーム右側枠2bにおける前側の部位の下面には、それぞれ、一対の左ベアリングボックス3および一対の右ベアリングボックス4が取り付けられている。例えば、これらのベアリングボックス3、4はプランマーブロックである。左ベアリングボックス3によって左駆動輪5(鉄輪)の駆動軸6が回転自在の状態で支持されており、右ベアリングボックス4によって右駆動輪7(鉄輪)の駆動軸8が回転自在の状態で支持されている。
【0018】
左駆動輪5の駆動軸6の車幅方向の内側には、ギヤ付きACモータ9が下向き姿勢で垂直に配置されており、駆動軸6の内側の軸端がギヤ付きACモータ9の出力軸(図示せず)に連結されている。同様に、右駆動輪7の駆動軸8の車幅方向の内側には、ギヤ付きACモータ10が下向き姿勢で垂直に配置されており、駆動軸8の内側の軸端がギヤ付きACモータ10の出力軸(図示せず)に連結されている。
【0019】
このように、自走式台車移動機1には、左右の2系統の車輪駆動機構が搭載されている。すなわち、左側の系統の車輪駆動機構は、左ベアリングボックス3、左駆動輪5、駆動軸6、ギヤ付きACモータ9から構成されており、右側の系統の車輪駆動機構は、右ベアリングボックス4、右駆動輪7、駆動軸8、ギヤ付きACモータ10から構成されている。したがって、一方の車輪駆動機構が故障し、あるいは構成部品に不具合が発生した場合においても、他方の車輪駆動機構を用いて新幹線車両から取り外したモータ台車を牽引して台車検修場に搬送する作業を中断することなく行うことができる。
【0020】
また、リフトアップした新幹線車両の下において自走式台車移動機1が故障により立ち往生してしまい、その撤去作業をリフトアップ状態の新幹線車両の下で行うという危険を伴う作業も不要になるので作業の安全性を確保できる。さらに、故障あるいは不具合の発生した側の部品のみを交換あるいは修理すればよいので、部品交換作業、修理作業を簡単に行うことができ、メンテナンス費用も低く抑えることができる。
【0021】
次に、車体フレーム2のフレーム左側枠2a、右側枠2bの後側の部位の下面にも、それぞれ、一対の左ベアリングボックス11および一対の右ベアリングボックス12が取り付けられている。左ベアリングボックス11によって左従動輪13(鉄輪)の車軸14が回転自在状態で支持されており、右ベアリングボックス12によって右従動輪15(鉄輪)の車軸16が回転自在の状態で支持されている。
【0022】
一方、図1から分かるように、車体フレーム2には、その後側の部位に、2系統の車輪駆動機構のそれぞれの駆動電源として用いるための2系統のバッテリ電源21が搭載されている。2系統のバッテリ電源21は、左側のギヤ付きACモータ9の駆動電源として用いるバッテリユニット22と、右側のギヤ付きACモータ10の駆動電源として用いるバッテリユニット23を備えている。それぞれのバッテリユニット22、23は、汎用の12V鉛バッテリを直列に複数台、本例では4台接続した48Vの駆動電源である。鉛バッテリの代わりにリチウムイオンバッテリ等を用いることもできる。
【0023】
本例では、この2系統の駆動用のバッテリ電源21に加えて、更に一系統の制御用バッテリ電源24が搭載されている。この制御用バッテリ電源24は2個の汎用12Vバッテリから構成されている。また、車体フレーム2におけるバッテリ電源21の左側の端には、それぞれの系統のバッテリユニットを充電するための3台の充電器25、26、27が搭載されている。
【0024】
車体フレーム2におけるバッテリ電源21の前側の部位には、図1および図2(b)に示すように、その中央部分にバッテリ電源昇圧用の2台の多重ブースタ31、32が搭載されている。これらの左側には各系統のバッテリ残量を表示するためのバッテリ残量表示器33aおよび充電器用コードリール33bが搭載されている。
【0025】
次に、車体フレーム2におけるバッテリ電源21の右側の部位には、操作盤34および運転席35が配置されている。運転席35の後側の部位、すなわち、バッテリ電源21の右側には各部の制御を司る制御盤36が搭載されている。また、車体フレーム2のフレーム右側枠2bの前端側の部位には図1、図2(a)に示すように、パトライト37aおよび非常停止ボタン38aが配置されている。同様に、フレーム左側枠2aの後端側の部位には図1、図2(c)に示すように、パトライト37bおよび非常停止ボタン38bが配置されている。さらに、フレーム左側枠2aの前端側の部位には図1、図2(a)に示すように、赤、緑に点灯切替可能な信号灯39が取り付けられている。
【0026】
次に、図3は左駆動輪5の部分を示す正面図、側面図および底面図である。故障時、保守点検時などにおいて、車体フレーム2から部品を取り外す作業を簡単に行うことができるようにすることが望ましい。このために、左駆動輪5の駆動軸6を回転自在の状態で支持している一対の左ベアリングボックス3は、それぞれ、車体フレーム2に対して前後2本の締結ボルト41およびナット42を用いて着脱可能に取り付けられている。駆動軸6の内側の軸端部は、ギヤ付きACモータ9の側のギヤボックス9a内の出力軸9bに同軸状態に連結固定されている。ギヤボックス9aは、ボルト・ナットによって、取り付け用ブラケット9cを介して車体フレーム2の側に着脱可能な状態で連結されている。したがって、左駆動輪5、駆動軸6、左ベアリングボックス3およびギヤ付きACモータ9からなるユニットを、車体フレーム2から簡単に取り外すことができる。右駆動輪7の側も同様に構成されており、その取り外しが簡単である。
【0027】
また、図4に示す正面図および側面図から分かるように、左従動輪13の一対の左ベアリングボックス11も前後2本のボルト・ナット11a、11bによって着脱可能な状態で車体フレーム2に取り付けられている。右従動輪15の部分も同様に構成されている。このように、左右の駆動輪5、7の部分、左右の従動輪13、15の部分の取り外し、取り付けを簡単に行うことができるので便利である。また、部品交換時における取り外し部品の部品点数を減らすことができ、部品交換作業を効率良く行うことができ、費用も低く抑えることができる。
【0028】
次に、図5は自走式台車移動機1の制御系を示す概略ブロック図である。この図に示すように、左右の車輪駆動機構を駆動するための2系統の駆動電力源および駆動制御系を備えている。すなわち、左右の車輪駆動機構を駆動するための駆動電力源として、バッテリユニット22、23を備えており、ここから出力される2系統の48Vの直流電流の供給制御が、制御盤36の制御回路36aによって切り替え制御される電力供給制御用のスイッチ36b、36cによって行われる。
【0029】
左側の駆動制御系では、48Vの直流電流が制御盤36のスイッチ36bを介して多重ブースタ31に供給されて、ギヤ付きACモータ10の駆動電圧である288Vまで昇圧される。多重ブースタ31としては、例えば、株式会社ニプロン製の多重ブースタ方式DC−DC昇圧コンバータを用いることができる。昇圧後の直流電流はDC−ACコンバータ、例えばシリコン整流器51を介して交流電流に変換された後にモータドライバ52に供給される。モータドライバ52は制御盤36の制御の下でギヤ付きACモータ9を駆動する。ギヤ付きACモータ9によって左駆動輪5が回転駆動される。
【0030】
同様に、右側の車輪駆動機構を駆動するための駆動電力源はバッテリ電源21のバッテリユニット23を備えており、ここから出力される48Vの直流電流の供給制御が制御盤36によって行われる。右側の駆動制御系では、48Vの直流電流は制御盤36のスイッチ36cを介して多重ブースタ32に供給されて、ギヤ付きACモータ10の駆動電圧である288Vまで昇圧される。昇圧後の直流電流はDC−ACコンバータ、例えばシリコン整流器53を介して交流電流に変換された後にモータドライバ54に供給される。モータドライバ54は制御盤36の制御の下でギヤ付きACモータ10を駆動する。ギヤ付きACモータ10によって右駆動輪7が回転駆動される。
【0031】
このように、本例では、駆動電力源として、12Vの汎用バッテリを直列接続した構成のバッテリユニット22、23を用いており、これを多重ブースタ31、32によってモータ駆動電力まで昇圧している。汎用の12Vバッテリを用いることにより、自走式台車移動機1の製造コストを下げることができ、バッテリ電源21の保守、バッテリ交換などを廉価に行うことができる。
【0032】
また、多重ブースタ31、32を用いて、ACモータの駆動電力として要求される電圧までバッテリ電圧を上げているので、直列接続する12Vバッテリの個数を減らすことができる。したがって、バッテリ交換時の部品点数が少なくて済むのでバッテリ交換費用を低く抑えることができる。また、バッテリ設置スペースが少なくて済むので、自走式台車移動機1の小型化、低コスト化に有利である。
【0033】
さらに、2系統の駆動電源および駆動制御系を備えているので、一方の系に故障あるいは不具合が発生した場合においても正常な系を用いて自走式台車移動機1を移動させることができる。よって、自走式台車移動機1がリフトアップした新幹線車両の下に立ち往生してしまった場合などにおいて作業員が危険な状態で回復作業を行う必要がない。また、故障あるいは不具合の発生した側の部品のみを交換すればよいので、部品交換作業が容易であり、メンテナンス費用も低く抑えることができる。
【0034】
ここで、モータ台車の牽引作業を安全に行うためには、車体フレーム2に搭載されている操作盤34に加えて、遠隔操縦用のリモートコントローラ55を備えていることが望ましい。この場合には、制御盤36は、操作盤34およびリモートコントローラ55からの操縦指令に基づき、左駆動輪5および右駆動輪7の回転駆動制御を行う。
【0035】
この場合のモータ台車の牽引作業は次のように行うことができる。まず、図1に示すように、リフトアップした新幹線車両の車体(図示せず)から取り外したモータ台車60(1)、60(2)・・・を相互に連結材61で連結すると共に、先頭のモータ台車60(1)を連結材62で自走式台車移動機1に連結する。
【0036】
この後は、リモートコントローラ55(図5参照)による遠隔操作によって、自走式台車移動機1をリフトアップした新幹線車両の車体の下から外れた位置まで移動させる。このようにすれば、作業員がリフトアップ状態の車体に下において自走式台車移動機1を操縦してモータ台車60(1)、60(2)・・・の移動作業を行う必要がないので安全である。次に、自走式台車移動機1およびモータ台車60(1)、60(2)・・・が車体の下から外れた位置まで移動した後は、図2(b)に示すように作業員Pが自走式台車移動機1の運転席35に座って操作盤34を操作することにより、遠隔操縦を行う場合よりも自走式台車移動機1を円滑かつ安全に操縦して、台車検修場まで牽引することができる。
【符号の説明】
【0037】
1 自走式台車移動機
2 車体フレーム
2a フレーム左側枠
2b フレーム右側枠
3 左ベアリングボックス
4 右ベアリングボックス
5 左駆動輪
6 駆動軸
7 右駆動輪
8 駆動軸
9、10 ギヤ付きACモータ
9a ギヤボックス
9b 出力軸
9c 取付け用ブラケット
11 左ベアリングボックス
11a 締結ボルト
11b ナット
12 右ベアリングボックス
13 左従動輪
14 車軸
15 右従動輪
16 車軸
21 バッテリ電源
22、23 バッテリユニット
24 制御用バッテリ電源
25、26、27 充電器
31、32 多重ブースタ
33 バッテリ残量表示器
34 操作盤
35 運転席
36 制御盤
36a 制御回路
36b、36c スイッチ
37a、37b パトライト
38a、38b 非常停止ボタン
39 信号灯
41 締結ボルト
42 ナット
51、53 シリコン整流器
52、54 モータドライバ
55 リモートコントローラ
60(1)、60(2) モータ台車
61、62 連結材
P 作業員
【特許請求の範囲】
【請求項1】
リフトアップした鉄道車両の車体から取り外された台車を軌道レールに沿って台車検修場まで牽引するために用いる自走式台車移動機であって、
車体フレームと、
車体フレームの前側あるいは後側の部位に、それぞれの駆動軸が回転自在の状態で支持されている左駆動輪および右駆動輪と、
車体フレームの後側あるいは前側に配置された左従動輪および右従動輪と、
左駆動輪および右駆動輪を個別に回転駆動可能な2系統の車輪駆動機構と、
2系統の車輪駆動機構のそれぞれの駆動電源として用いるために車体フレームに搭載されている2系統のバッテリ電源とを有していることを特徴とする自走式台車移動機。
【請求項2】
請求項1において、
2系統の車輪駆動機構は、左駆動輪を回転駆動するために車体フレームに搭載されている第1のギヤ付きモータ、および、右駆動輪を回転駆動するために車体フレームに搭載されている第2のギヤ付きモータを備えていることを特徴とする自走式台車移動機。
【請求項3】
請求項1または2において、
2系統の前記バッテリ電源は、第1のギヤ付きモータの駆動電源として用いる複数個の12Vバッテリが直列接続された構成の第1のバッテリユニットと、第2のギヤ付きモータの駆動電源として用いる複数個の12Vバッテリが直列接続された構成の第2のバッテリユニットとを備えていることを特徴とする自走式台車移動機。
【請求項4】
請求項3において、
第1のバッテリユニットのバッテリ出力を昇圧して第1のギヤ付きモータを駆動するための駆動電圧を得るための第1の多重ブースタと、
第2のバッテリユニットのバッテリ出力を昇圧して第2のギヤ付きモータを駆動するための駆動電力を得るための第2の多重ブースタとを有していることを特徴とする自走式台車移動機。
【請求項5】
請求項1ないし4のうちのいずれかの項において、
左駆動輪の駆動軸および右駆動輪の駆動軸は、それぞれ、車体フレームに対して締結ボルトを用いて着脱可能に取り付けられている左ベアリングボックスおよび右ベアリングボックスによって回転自在の状態で支持されていることを特徴とする自走式台車移動機。
【請求項6】
請求項1ないし5のうちのいずれかの項において、
車体フレームに搭載されている操作盤と、
遠隔操縦用のリモートコントローラと、
操作盤およびリモートコントローラからの操縦指令に基づき、左駆動輪および右駆動輪の回転駆動制御を行うために車体フレームに搭載されている制御盤とを有していることを特徴とする自走式台車移動機。
【請求項7】
請求項6に記載の自走式台車移動機を用いて、リフトアップされた鉄道車両の車体から取り外された台車を軌道レールに沿って台車検修場まで牽引する台車移動方法であって、
リフトアップされた鉄道車両の車体から取り外された台車を自走式台車移動機に連結し、
リモートコントローラによって自走式台車移動機をリフトアップされた鉄道車両の下から外れた位置まで移動させ、
しかる後に、車体フレームに載った作業員が操作盤を操作しながら、自走式台車移動機を所定の台車検修場まで牽引することを特徴とする台車移動方法。
【請求項1】
リフトアップした鉄道車両の車体から取り外された台車を軌道レールに沿って台車検修場まで牽引するために用いる自走式台車移動機であって、
車体フレームと、
車体フレームの前側あるいは後側の部位に、それぞれの駆動軸が回転自在の状態で支持されている左駆動輪および右駆動輪と、
車体フレームの後側あるいは前側に配置された左従動輪および右従動輪と、
左駆動輪および右駆動輪を個別に回転駆動可能な2系統の車輪駆動機構と、
2系統の車輪駆動機構のそれぞれの駆動電源として用いるために車体フレームに搭載されている2系統のバッテリ電源とを有していることを特徴とする自走式台車移動機。
【請求項2】
請求項1において、
2系統の車輪駆動機構は、左駆動輪を回転駆動するために車体フレームに搭載されている第1のギヤ付きモータ、および、右駆動輪を回転駆動するために車体フレームに搭載されている第2のギヤ付きモータを備えていることを特徴とする自走式台車移動機。
【請求項3】
請求項1または2において、
2系統の前記バッテリ電源は、第1のギヤ付きモータの駆動電源として用いる複数個の12Vバッテリが直列接続された構成の第1のバッテリユニットと、第2のギヤ付きモータの駆動電源として用いる複数個の12Vバッテリが直列接続された構成の第2のバッテリユニットとを備えていることを特徴とする自走式台車移動機。
【請求項4】
請求項3において、
第1のバッテリユニットのバッテリ出力を昇圧して第1のギヤ付きモータを駆動するための駆動電圧を得るための第1の多重ブースタと、
第2のバッテリユニットのバッテリ出力を昇圧して第2のギヤ付きモータを駆動するための駆動電力を得るための第2の多重ブースタとを有していることを特徴とする自走式台車移動機。
【請求項5】
請求項1ないし4のうちのいずれかの項において、
左駆動輪の駆動軸および右駆動輪の駆動軸は、それぞれ、車体フレームに対して締結ボルトを用いて着脱可能に取り付けられている左ベアリングボックスおよび右ベアリングボックスによって回転自在の状態で支持されていることを特徴とする自走式台車移動機。
【請求項6】
請求項1ないし5のうちのいずれかの項において、
車体フレームに搭載されている操作盤と、
遠隔操縦用のリモートコントローラと、
操作盤およびリモートコントローラからの操縦指令に基づき、左駆動輪および右駆動輪の回転駆動制御を行うために車体フレームに搭載されている制御盤とを有していることを特徴とする自走式台車移動機。
【請求項7】
請求項6に記載の自走式台車移動機を用いて、リフトアップされた鉄道車両の車体から取り外された台車を軌道レールに沿って台車検修場まで牽引する台車移動方法であって、
リフトアップされた鉄道車両の車体から取り外された台車を自走式台車移動機に連結し、
リモートコントローラによって自走式台車移動機をリフトアップされた鉄道車両の下から外れた位置まで移動させ、
しかる後に、車体フレームに載った作業員が操作盤を操作しながら、自走式台車移動機を所定の台車検修場まで牽引することを特徴とする台車移動方法。
【図1】


【図2】
【図3】

【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−76575(P2012−76575A)
【公開日】平成24年4月19日(2012.4.19)
【国際特許分類】
【出願番号】特願2010−222908(P2010−222908)
【出願日】平成22年9月30日(2010.9.30)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.パトライト
【出願人】(000148380)株式会社前田製作所 (14)
【出願人】(507293505)株式会社ケイ・エス・ケイ (2)
【出願人】(000158725)岐阜工業株式会社 (56)
【公開日】平成24年4月19日(2012.4.19)
【国際特許分類】
【出願日】平成22年9月30日(2010.9.30)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.パトライト
【出願人】(000148380)株式会社前田製作所 (14)
【出願人】(507293505)株式会社ケイ・エス・ケイ (2)
【出願人】(000158725)岐阜工業株式会社 (56)
[ Back to top ]