
自走式検査機
【課題】移動式処理機により生成される処理物の品質向上に寄与することができる移動式検査機を提供する。
【解決手段】被処理物の発生現場にて移動式処理機の被処理物又は処理物を検査する移動式検査機であって、下部車体上に設けた動力装置及びホッパと、ホッパの下方位置から延在するコンベヤ40と、ホッパに受け入れた被検査物の検査データを検出する検出部500と、検出部500よりも下流側の位置で被検査物をコンベヤ40上から除去する選別装置60と、検出部500で検出された検査データを基に算出された被検査物の特徴量を記憶部592から読み出した設定値と比較し、コンベヤ40上の被検査物の品質の良否を判定する判定部564と、判定部564から入力された品質不良の被検査物の情報を基に選別装置60を制御する選別装置コントローラ580とを備える。
【解決手段】被処理物の発生現場にて移動式処理機の被処理物又は処理物を検査する移動式検査機であって、下部車体上に設けた動力装置及びホッパと、ホッパの下方位置から延在するコンベヤ40と、ホッパに受け入れた被検査物の検査データを検出する検出部500と、検出部500よりも下流側の位置で被検査物をコンベヤ40上から除去する選別装置60と、検出部500で検出された検査データを基に算出された被検査物の特徴量を記憶部592から読み出した設定値と比較し、コンベヤ40上の被検査物の品質の良否を判定する判定部564と、判定部564から入力された品質不良の被検査物の情報を基に選別装置60を制御する選別装置コントローラ580とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被処理物の発生現場にて移動式処理機に供給される被処理物又は移動式処理機で処理された処理物を検査する移動式検査機に関する。
【背景技術】
【0002】
岩石やビル解体に伴うコンクリートガラを破砕処理する破砕処理や建設発生土に土質改良材を混合処理する土質改良処理等、被処理物に所定の処理を施す処理プラントは従前より様々なものが存在する。こうした固定式の処理プラントにおいては、処理物の品質を高めるために、一連の処理工程の中に検査工程を置くことがある。被処理物(コンクリートガラ)から再生骨材を製造するのに、処理前の被処理物をCCDカメラで撮影し、撮影により取得した色調データを基に被処理物の品質を推定し破砕機の運転条件を調整するもの(特許文献1等)等がその一例である。
【0003】
【特許文献1】特開2006−167646号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
近年、自走式、牽引走行式等を含む移動式処理機(例えば、自走式破砕機や自走式土質改良機)が数多く開発されている。こうした移動式処理機は発生現場に搬入して被処理物の近くで運転することができることが大きなメリットであり、大量の被処理物を現場から離れた処理プラントで処理する場合に比べ、被処理物の運搬が不要であるため処理費用の大幅な低減が可能である。
【0005】
しかしながら、移動式処理機はトレーラ等による輸送性を確保するため一般道路の輸送制限により大きさが制約され、搭載する各機器が固定式処理プラントのそれに比べて必然的に小型になる。そのため、移動式処理機は、一般的に大量の被処理物を処理する上では固定式の処理プラントに比較して不利である。
【0006】
そこで本発明は、移動式処理機により生成される処理物の品質向上に寄与することができる移動式検査機を提供することを目的とする。
【課題を解決するための手段】
【0007】
(1)上記目的を達成するために、本発明は、被処理物の発生現場にて移動式処理機に供給される被処理物又は前記移動式処理機で処理された処理物を被検査物として検査する移動式検査機であって、下部車体と、前記下部車体上に設けた動力装置と、前記下部車体上の一方側に設けた被検査物の受け入れ部と、前記受け入れ部の下方位置から前記下部車体の他方側に向かって延在したコンベヤと、前記受け入れ部を介して受け入れた被検査物の検査データを検出する検出部と、前記コンベヤ上の前記検出部よりも下流側の位置に設けられ、被検査物を前記コンベヤ上から除去し選別する選別装置と、被検査物の良否判定の基準とする特徴量に対し目標品質に応じて予め設定した設定値を記憶した記憶部と、前記検出部で検出された検査データを基に算出された被検査物の前記特徴量を前記記憶部から読み出した設定値と比較し、前記コンベヤ上の被検査物の品質の良否を判定する判定部と、前記判定部から入力された品質不良の被検査物の情報を基に前記選別装置を制御し、前記コンベヤにより搬送される品質不良の被検査物を良品と分別する選別装置コントローラとを備えたことを特徴とする。
【0008】
(2)上記(1)において、好ましくは、被検査物の断面画像を前記検査データとして取得するX線断面撮像装置を有する前記検出部と、前記検出部で取得された複数の断面画像から被検査物の各粒子の各断面画像を抽出する画像処理部と、前記画像処理部により抽出された個々の粒子の各断面画像を基に被検査物の各粒子の質量を前記特徴量として算出し、算出した特徴量を前記設定値と比較して被検査物の品質の良否を判定する前記判定部とを備えたことを特徴とする。
【0009】
(3)上記(1)において、好ましくは、前記コンベヤ上の被検査物の俯瞰撮影画像を前記検査データとして取得するカメラを有する前記検出部と、前記検出部で取得された画像を基に前記特徴量として算出された被検査物の粒度分布を前記設定値と比較して被検査物の品質の良否を判定する前記判定部とを備えたことを特徴とする。
【0010】
(4)上記(1)において、好ましくは、前記コンベヤ上の被検査物に向けて照射した電磁波の反射成分を前記検査データとして取得する電磁波検出器を有する前記検出部と、前記検出部で取得された電磁波を基に前記特徴量として算出された被検査物の含水率を前記設定値と比較して被検査物の品質の良否を判定する前記判定部とを備えたことを特徴とする。
【0011】
(5)上記(1)において、好ましくは、前記移動式処理機に備えられた通信部との間で検査結果及び制御信号を授受する通信部を備えたことを特徴とする。
【発明の効果】
【0012】
本発明によれば、移動式処理機により生成される処理物の品質向上に寄与することができる。
【発明を実施するための最良の形態】
【0013】
以下に図面を用いて本発明の実施の形態を説明する。
本発明の移動式検査機は、被処理物の発生現場にて移動式処理機械とタンデムに配置して処理システムを構成し、移動式処理機に供給される被処理物又は移動式処理機で処理された処理物を検査(非破壊検査)するのに好適である。
【0014】
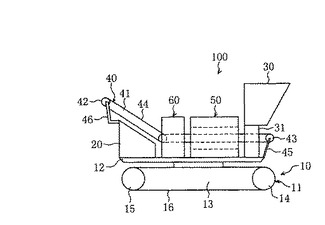
図1は本発明の移動式検査機の第1の実施の形態の概略構成を表す側面図である。
第1の実施の形態に係る移動式検査機は、移動式処理機の前段又は後段に配置することで、処理工程の一連の流れの中で被検査物(被処理物又は処理物)の品質を検査することができるものであり、例えば自走式破砕機等の移動式破砕機(ジョークラッシャ)の後段に配置した場合、移動式破砕機で破砕したコンクリートガラを検査して品質に応じて選別することで、製品としての再生路盤材の品質向上に寄与する。
【0015】
図1に示したように、本実施の形態の移動式検査機100は、下部車体としての走行体10と、搭載した各機器に動力を供給する動力装置20と、被検査物を受け入れる受け入れ部としてのホッパ30と、被検査物を搬送する搬送手段であるコンベヤ40と、被検査物の品質を検査する検査部50と、コンベヤ40上の品質不良の被検査物を選別する選別装置60とを備えている。
【0016】
走行体10は、左右一対の走行装置11、及び走行装置11の上部にほぼ水平に設けた一対の本体フレーム12で構成されている。走行装置11は、本体フレーム12の下部に連設したトラックフレーム13と、トラックフレーム13の前後両端に設けた従動輪(アイドラ)14及び駆動輪15と、従動輪14及び駆動輪15に掛け回した無限軌道履帯16と、駆動輪15に連結した図示しない駆動装置とを備えている。また、本体フレーム12とトラックフレーム13を旋回フレーム(図示せず)及び旋回モータ(図示せず)を介して接続し、旋回モータを駆動することによって本体フレーム12がトラックフレーム13に対して旋回する構成としても良い。
【0017】
ホッパ30は、上方拡開形状に形成され上下が開口した枠型の部材であり、支持部材31を介して本体フレーム12の長手方向一方側(図1中右側)に支持されている。
【0018】
コンベヤ40は、ホッパ30の下方位置から走行体10の他方側(図1中の左側)に向かって延在しており、ホッパ30の下方位置から本体フレーム12の長手方向一方側に向かって水平に延在し、検査部50、選別装置60を通過した後の下流側の部分は屈曲している。この屈曲後の下流側の部分は、動力装置20の上方を通過し、搬送方向に向かって上る方向に傾斜している。また、コンベヤ40は、コンベヤフレーム41と、コンベヤフレーム41の前後両端に設けた駆動輪42及び従動輪43と、駆動輪42及び従動輪43に掛け回したコンベヤベルト44と、駆動輪42に連結した図示しない駆動装置とを備えている。コンベヤフレーム41は、支持部材45,46を介してそれぞれ本体フレーム12及び動力装置20に支持されている。本実施の形態において、コンベヤ40は、全体が本体フレーム12より上側に位置しているが、本体フレーム12よりも下方を通し、ホッパ30の下方位置から来て動力装置20の下を通過する辺りから上り傾斜になるように、本体フレーム12や動力装置20から吊り下げる構成としても良い。また、コンベヤベルト44は、対向するホッパ30から導出される被検査物のこぼれを抑制すべく、ホッパ30の下部開口よりも幅を広くしてある。
【0019】
また、図1では特に図示していないが、コンベヤ40の例えばコンベアベルト44の内側の空間には、コンベアベルト44の位置を検出するパルス検出器47(後述する図4参照)が設けられている。パルス検出器47は、例えばLED等からの照射光や音の反射成分を検出する方式のものを用いることができる。この場合、コンベヤベルト44の搬送面の裏側に一定間隔の既知の数の凹凸を形成しておき、そこに照射した光や音の反射成分を検出してパルス変換して出力するようにすると、パルス信号のカウントによってコンベヤベルト44の循環移動量が算出される。また、予め各凹凸にアドレスを与えておけば、コンベアベルト44の各点の現在位置を算出することもできる。
【0020】
動力装置20は、本体フレーム12の長手方向他方側(図1中左側)端部に支持されており、特に図示していないが、エンジン(原動機)やエンジンにより駆動する油圧ポンプ、油圧ポンプからの圧油の流れを制御する制御弁装置等を内蔵している。同じく図示していないが、移動式検査機100には、例えば動力装置20の内部或いは動力装置20の近傍に電源(バッテリ)が設けられている。
【0021】
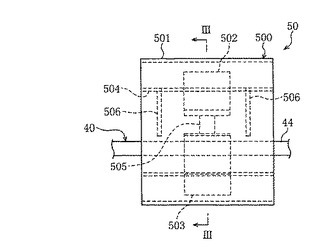
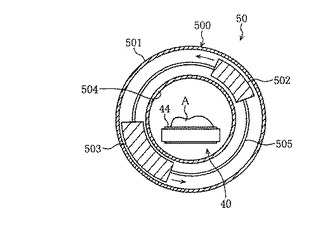
図2は検査部50の側面図、図3は図2中のIII−III断面による断面図である。
図2において、本実施の形態の検査部50は、被処理物の断面画像を取得して画像処理し良品か不良品かを判断し選別する機能を果たす箇所であり、被検査物の画像を取得する検出部500と、検出部500で取得した画像に基づく被検査物の良品判定結果に応じて選別装置60を駆動制御する制御演算部550(後の図4参照)とを備えている。
【0022】
検出部500はX線断面撮像装置であり、検出部500の本体をなす筐体501と、X線を照射するX線照射部502と、X線照射部502から照射されたX線を検出するX線検出部503とを備えている。筐体501は、中央部分に円筒状に形成された開口部504を有するドーナツ状の箱型部材である。開口部504には、コンベヤ40が貫通しており、コンベヤ40により搬送される被検査物がコンベヤ40の搬送速度で開口部504を通過するようになっている。このとき、搬送する被検査物が開口部504の中心を通過するように、コンベヤ40は、コンベヤベルト44の搬送面が開口部504の中心よりも下側に設定距離だけオフセットするように配置されている。また、開口部504には、X線照射部502のコンベヤ搬送方向の上流側及び下流側に、筐体501からのX線の漏洩を防ぐカーテン506を設けてある。
【0023】
上記X線照射部502及びX線検出部503は、筐体501内でリング状のガントリ505によって連結されており、特に図示していないが、筐体501の外側の内壁面に設けたリング状(開口部504と同心状)の図示しないガイドレールにスライド可能に係合している。これらX線照射部502及びX線検出部503は、筐体501の開口部504の中心を挟んで対向している。また、特に図示していないが、ガントリ505には、X線照射部502及びX線検出部503が係合するガイドレールに沿って走行する駆動装置が取り付けられている。この駆動装置を駆動することにより、リング状のガイドレールを駆動装置が走行し、対向配置されたX線照射部502とX線検出部503とが、ガントリ505とともに筐体501内で開口部504の中心周りに回転する。この回転動作に伴ってX線照射部502からX線を照射することにより、コンベヤ40上を搬送される被処理物Aを透過したX線がX線検出部503で検出されるようになっている。X線照射量は断面画像の撮像をする上で必要最小限に抑えることが望ましい。
【0024】
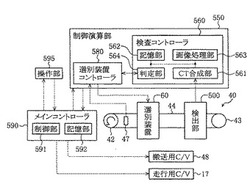
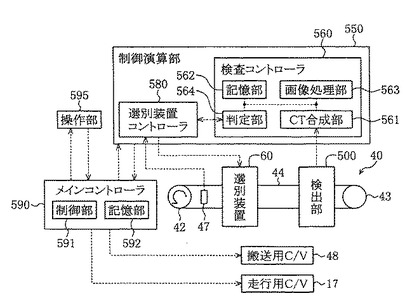
図4は制御演算部550の構成を表すブロック図である。
図4において、制御演算部550は、検出部500のX線検出部503からの検出信号を基に被検査物の品質を判定する検査コントローラ560と、検査コントローラ560からの良否判定(詳細は後述)の結果に従って選別装置60を制御する選別装置コントローラ580とを備えている。
【0025】
検査コントローラ560は、検出部500のX線検出部503からのX線検出信号を基に検出部500を通過した被検査物の断面画像を合成(構築)するCT合成部561と、合成した画像データを記憶する記憶部562と、記憶部562に記憶された各合成画像を処理し被検査物の個々の粒子の断面画像データを抽出する画像処理部563と、画像処理部563で抽出された断面画像データを基に被検査物の個々の粒子の品質を判定する判定部564とを備えている。
【0026】
選別装置コントローラ580は、コンベヤ40に設けたパルス検出器47からのパルス信号を入力し、この入力信号を基にコンベヤベルト44の位相を演算し監視している。このとき、選別装置コントローラ580に入力されるパルス信号は、選別装置コントローラ580を介して随時検査コントローラ560にも入力される。CT合成部561では、X線検出部503から入力されるX線検出信号に、これと同時に入力されたパルス信号が対応付けられ、合成する断面画像にその断面画像が取得されたコンベヤベルト44上の位置情報が付される。したがって、記憶部562には、コンベヤベルト44上の位置情報付きの被検査物の断面画像が蓄積される。すなわち、判定部564から出力される被検査物の良否判定結果には、その判定の基となった断面画像の位置情報が伴う。
【0027】
これにより、選別装置コントローラ580では、判定部564からの良否判定結果を基にコンベアベルト44上の被検査物を除去すべきか否かを認識し、除去すべき被検査物(不良品)については、そのコンベアベルト44上の位置情報と自己で管理しているコンベアベルト44の位相とに基づき、不良品が選別装置60を通過する際に選別装置60に駆動指令信号を出力して不良品をコンベアベルト44上から除去する。
【0028】
なお、検査コントローラ560の記憶部562には、少なくとも検出部500の撮像位置から選別装置60を通過するまでの断面画像及びその位置情報が入る容量が要求される。容量が多い分には機能上問題ないが、最小限の容量に止める場合はデータ蓄積量が一定の値を超えた後、古いデータを記憶した領域から順にデータを上書きしていくようにする。
【0029】
また、移動式検査機100には、制御演算部550とは別に移動式検査機100の全体を制御するメインコントローラ590が設けられている。このメインコントローラ590は、走行系や搬送系等の動作を制御する制御部591の他、判定部564における被検査物の品質の判定基準となる設定値を記憶する記憶部592を有する。制御部591は、操作者による操作に伴う操作部595からの操作信号を基に、走行系や搬送系等への指令信号を演算し出力する。本例では、走行用、搬送用の駆動装置(図示せず)にそれぞれ油圧モータを想定しているので、制御部591から走行系、搬送系に出力される指令信号は、走行体10の走行モータ、コンベヤ40のコンベヤモータへの圧油の流れ(流量及び方向)をそれぞれ制御する走行用コントロールバルブ17、搬送用コントロールバルブ48のソレノイド駆動部に対する指令信号である。電動モータ等を用いて走行系、搬送系を電動式にした場合、制御部591から走行系、搬送系に出力される指令信号は、走行体10の走行モータ、コンベヤ40のコンベヤモータの制御部に出力される構成となる。
【0030】
また、メインコントローラ590の記憶部592に記憶される設定値は、各被検査物の検査対象項目(品質判定の基準、換言すれば品質を評価するパラメータとなる項目)に対して目標品質に応じて予め設定された制御しきい値である。判定部564は、前述の良否判定の際、この記憶部592から該当の設定値を読み出し、画像処理部563からの画像処理結果を設定値と比較して良否判定する。なお、本例では、被検査物の断面画像を画像処理して粒子単位の断層像を抽出することができるので、各粒子の質量(後述)、外径(形や大きさ)、体積、位置、粒度分布、球形度、球形度分布等を精度良く算出することができる。例えば粒度を品質の判定基準とする場合、特徴量として粒子の外径を算出し、それに対して目標品質(目標粒度)に準ずる設定値を設定しておけば、その設定値との比較により品質を判定することができる。質量や体積、分布等の他の項目についても同様である。
【0031】
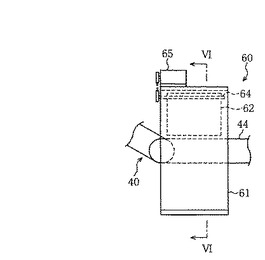
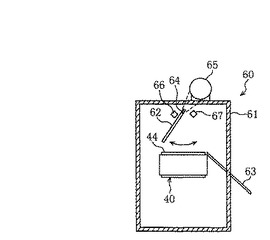
図5は選別装置60の側面図、図6は図5のVI−VI断面による断面図である。
選別装置60は、コンベヤ40上の検出部500よりも搬送方向下流側の位置に設けられており、コンベヤ40を覆うように設けた装置本体をなす筐体61と、被検査物をコンベヤベルト44上から選別し除去する選別羽根62と、選別羽根62で選別された被検査物をガイドするシュート63とを備えている。
【0032】
筐体61は、コンベヤ40による被検査物の搬送方向両側が開口した枠型の部材であり、本体フレーム12上に搭載されている。
【0033】
選別羽根62は、コンベヤベルト44の上方に位置するように、基端部(上端部)が筐体61の天井部に支軸64を介して回動自在に支持されている。支軸64は選別羽根62に対して固定されており、筐体61の例えば上部に搭載した電動の駆動モータ65(油圧でも良い)の出力軸に、駆動伝達機構(スプロケット、ギヤ等)を介して連結されている。この駆動モータ65は前述した選別装置コントローラ580からの駆動指令信号により駆動する。支軸64は被検査物の搬送方向に延在しており、駆動モータ65が駆動すると支軸64の回転に伴って選別羽根62はコンベアベルト44に直交する方向に揺動する。
【0034】
このとき、選別羽根62の揺動するストロークはリミットスイッチ66,67により制限されている。通常時、選別羽根62が先端部をコンベヤベルト44の幅方向一方側(図6中左側)にある位置で待機しているが、選別装置コントローラ580からの駆動指令信号が駆動モータ65に入力されると、駆動モータ65が駆動して選別羽根62がコンベヤベルト44の幅方向他方側(図6中右側)に揺動する。その後、選別羽根62が進行方向に対向するリミットスイッチ67を押すと、リミットスイッチ67からの信号が選別装置コントローラ580に入力される。リミットスイッチ67からの信号が入力されると、選別装置コントローラ580は駆動モータ65への駆動指令信号を逆転駆動の指令信号に切り換え、選別羽根62をコンベアベルト44の幅方向一方側に揺動させる(復帰させる)。その後、選別羽根62がリミットスイッチ66に到達し、リミットスイッチ66からの信号が選別装置コントローラ580に入力されると、選別装置コントローラ580は駆動モータ65への駆動指令信号の出力を停止し待機位置で停止させる。このようにリミットスイッチ66,67と組み合わせて選別羽根62を往復揺動させる場合、駆動モータ65に直流モータを用いることができる。リミットスイッチ66,67を省略し、駆動モータ65にサーボモータ等の回転角度を精度良く制御できるものを用い、選別羽根62を所定角度で折り返し往復揺動させるようにしても良い。
【0035】
また、選別羽根62の長さは、先端部(下端部)の軌跡がコンベアベルト44の搬送面に摺接又は近接する程度に調節されている。したがって、選別羽根62が待機位置から揺動すると、選別羽根62に干渉するコンベヤベルト44上の被検査物が側方に押し退けられ、シュート63に落とされる。選別羽根62は上記の如く往復運動するため、選別対象の被検査物をシュート63に向かって掻き落とした後、速やかに待機位置に復帰する。
【0036】
シュート63のシュート面(被検査物が滑り落ちる面)は、少なくとも被検査物を受け入れる部分においては、コンベヤ40による被検査物の搬送方向にとった寸法が選別羽根62よりも大きい。つまり、シュート63の上流側端部は選別羽根62の上流側端面よりも上流側に位置し、シュート63の下流側端部は選別羽根62の下流側端面よりも下流側に位置する。シュート63は、そのシュート面の上端部がコンベヤベルト44の選別羽根62の回動方向一方側(本例では図6中の右側)の側部に近接し、そこから下り傾斜となる姿勢で筐体61に支持されている。筐体61には、シュート63のシュート面に対向する図示しない開口部が設けられており、シュート63を流れ落ちる被検査物が開口部を通って筐体61の外部に排出される。このようにして、判定部564により品質不良と判定された被検査物は、選別装置60により選別されコンベヤ40上から取り除かれるようになっている。
【0037】
次に上記構成の本実施の形態の移動式検査機100の動作を説明する。
まず、移動式検査機100を現場内で適宜走行させ所定の位置に設置する。ここでは一例として、自走式破砕機(ジョークラッシャ)の後段に配置して自走式破砕機から排出される破砕物の粒単体の質量を検査し、破砕物の粒単体が目標質量以下となるように破砕処理されているかどうかを基準に良否判定する場合を説明する。
【0038】
自走式破砕機の排出コンベヤから放出された被検査物(破砕物)は、ホッパ30に導入され、ホッパ30を介してコンベヤ40上に導かれる。被検査物は、循環駆動するコンベヤ40により搬送され、検出部500を通過する。検出部500を通過する際、被検査物の断面画像が撮像され、制御演算部550において断面画像を基に被検査物の品質が良否判定される。その結果、良品と判定された被検査物はそのまま搬送され、選別装置60を通過して最終的にコンベヤ40の放出端から放出される。一方、制御演算部550により品質不良と判定された被検査物は、選別装置60に導入された際に選別羽根62によりコンベヤベルト44上から払い除けられ、シュート63を介して良品と分別されて排出される。
【0039】
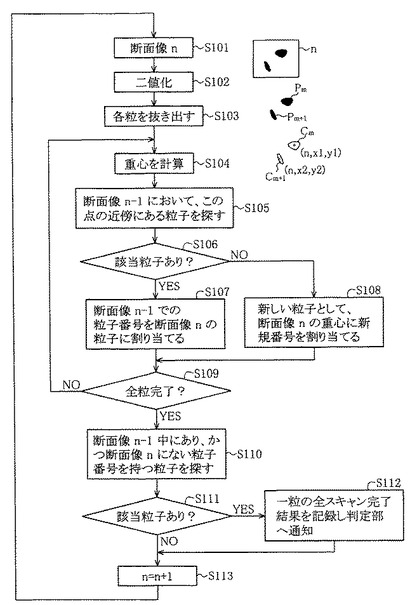
ここで、図7は画像処理部563による画像処理アルゴリズムの一例を表すフローチャートである。
【0040】
画像処理部563は、まずCT合成部561で合成された被検査物のコンベヤ40上の特定位置の断面画像nを記憶部562から読み出して(ステップS101)、断面画像nの各画素の輝度を予め設定された閾値し二値化処理し(ステップS102)、輝度の高い空間部分を除去し輝度が閾値よりも低い粒子Pm,Pm+1,・・・の画像データを抽出する(ステップS103)。
【0041】
次に、粒子Pm,Pm+1,・・・のうち、ステップS103で抽出した画像データを基に断面画像上の座標系での粒子Pmの重心座標Cmを算出する(ステップS104)。粒子Pmの重心座標Cmを算出したら、断面画像nの1つ前(上流側の隣接位置)の解析済みの断面画像n−1に粒子Pmと重心座標が近い(予め設定した距離(閾値)以内にある)粒子を検索し(ステップS105)、該当粒子があるかどうかを判定する(ステップS106)。
【0042】
該当粒子がある場合、断面画像n−1の該当粒子の粒子番号を粒子Pmに割り当ててステップS109に手順を進める(ステップS107)。該当粒子がない場合、新規の粒子番号を粒子Pmに割り当ててステップS109に手順を進める(ステップS108)。ステップS109では、ステップS103で抽出した粒子の全てについて、ここまでの処理が完了したかどうかを判定し、同様の処理が未完了な粒子がある場合、手順をステップS104に戻し、断層像n中の次の粒子Pm+1を対象として同じ手順を繰り返す。断面画像n中の全粒子についてここまでの処理が完了した場合、手順をステップS110に移行する。
【0043】
ステップS110に手順を移すと、画像処理部563は、断面画像n−1中にあって断面画像nには存在しない粒子番号が付与された粒子を検索し、ステップS111において該当粒子があるかどうかを判定する。ここで発見される該当粒子は、その全ての断面画像について解析が完了した粒子である。該当粒子がある場合、ステップ112の手順を経由し、該当粒子の各断面の解析結果(断面画像やその重心座標等)を記憶部562に記憶し、この該当粒子の解析が完了した旨を伝える信号を判定部564に出力し、ステップS113に手順を移す。ステップS111で該当粒子が見つからない場合、ステップS112を介さずそのままステップS113に手順を移す。ステップS113では、断面画像nについて以上の解析処理を完了し、断面画像nの1つ後(下流側の隣接位置)の未解析の断面画像n+1を解析対象に変え(n=n+1とし)、ステップS101に手順を戻す。
【0044】
このように、画像処理部563は、コンベヤ40が駆動している間、ステップS101〜S113の処理を繰り返し実行し、連続して撮像されるコンベヤ40上の被検査物の断面画像を順次解析処理し、粒毎のスキャンデータを記憶部562に記録する。
【0045】
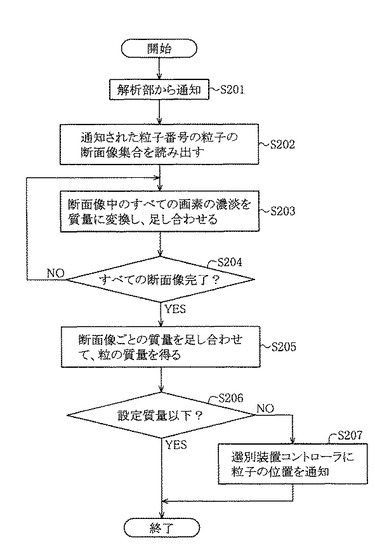
また、図8は判定部564による良否判定アルゴリズムの一例を表すフローチャートである。
本例において、判定部564は画像処理部563で抽出された粒子の各画像データを基に、粒子毎にその特徴量、例えば質量、体積、球形度等の情報を取得し、各粒子の座標データ等と合わせて粒度分布や粒質量分布、球形度分布等を算出することができる。そして、これらのうち良否判定に用いる特徴量を、良否判定の基準として予めメインコントローラ590の記憶部592に記憶した設定値(閾値)と比較し、品質の良否判定を粒子毎に実行する。
【0046】
すなわち、判定部564は、まず先のステップS112の手順で画像処理部563からスキャン完了の信号を入力したら(ステップS201)、その信号に対応する粒子番号の粒子の各断面画像データの集合を記憶部562から読み出す(ステップS202)。断面画像の画像データを読み出したら、その画像1枚1枚について各画素の濃淡(輝度)を質量に変換し、現在判定の対象としている粒子の各断面画像につき、各画素の質量変換値の合計値をそれぞれ算出する(ステップS203)。このステップS203における輝度から質量への変換処理は、予め実測する等して求めておいた画素の輝度と質量との関係に基づいて実行される。
【0047】
続くステップS204に手順を移すと、判定部564は、現在判定の対象としている粒子の全ての断面画像につき、質量変換値の合計値の算出が完了したかどうかを判定し、質量変換値の合計値が得られていない画像が残っていればステップS203に手順を戻す。ステップS204で当該粒子の全画像について質量変換値の合計値の算出が完了していれば、次のステップS205に手順を移し、各画像の合計質量変換値の合計値を算出し、現在判定の対象としている粒子の質量を推定する。
【0048】
対象の粒子単体の質量を算出したら、判定部564は、メインコントローラ590の記憶部592から読み出した設定値(目標粒度に準ずる)と算出値とを比較し、算出値が設定値以下であるかどうかを判定する(ステップS206)。算出値が設定値より大きければ、判定部564は現在判定の対象としている粒子は品質不良と判断して手順をステップS207に移し、その粒子のコンベヤベルト44上の位置を選別装置コントローラ580に通知する。粒子の質量の算出値が設定値以下で、ステップS206の判定が満たされた場合、判定部564は選別装置コントローラ580への通知を省略して図8の判定の手順を終了する。
【0049】
判定部564は、画像処理部563からスキャン終了の通知を受けたら、それらの粒子のそれぞれを対象として、以上のステップS201〜S207の処理を逐次実行する。選別装置コントローラ580は、ステップS207で出力された粒子の位置情報を受けたら、そのコンベアベルト44上の位置が選別羽根62による払い除け位置に到達する際に選別装置60を駆動させ、品質不良と判定された粒子をコンベアベルト44上から除去する。設定粒度以下の粒子については粒子位置が通知されないので、その付近に品質不良の粒子がなければ、選別羽根62によりコンベアベルト44上から除去されることなく選別装置60を通過し、コンベヤ40の放出端から排出される。
【0050】
以上の本実施の形態によれば、廃棄物再資源化等の処理において、被処理物又は処理物の品質を検査し、不良判定されたものについては自動的に除去することができるので、不良品割合を低減させることで処理物の品質を向上させることができる。しかも、下部車体10上に必要機器を搭載してユニット化することによりトレーラ等による輸送性が確保されているので、被処理物の発生現場への搬入も容易である。さらに、移動式であるため現場内での設置位置の変更も容易であり、所望の位置に設置し易い。したがって、被処理物の発生現場において移動式処理機と組み合わせてシステムを構成することも容易であり、移動式処理機による処理物の品質向上に寄与し、移動式処理機とともに現場で処理システムを構成するので被処理物を現場外に持ち出して処理する場合に比して処理コストも大きく下げられる。また、移動式であるので、移動式処理機とともにシステムを構築する場合、システムのレイアウトの自由度も高い。
【0051】
また、本実施の形態では、移動式検査機100を移動式処理機の後段に配置して品質基準から外れる処理物(生産物)を除去し処理物の品質を安定化させる運用例を説明したが、移動式検査機100を移動式処理機の前段に配置した場合、例えば移動式処理機の処理に不適な品質の被処理物を移動式検査機100で除去することで、異物や処理困難な性状の処理物が移動式処理機に供給されることを未然に抑制することができるので、処理物の品質向上に加え、移動式処理機の故障を未然に抑制する効果も期待できる。
【0052】
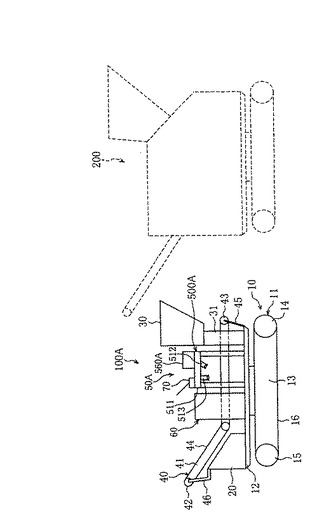
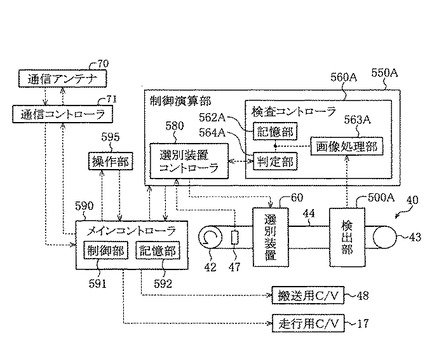
図9は本発明の移動式検査機の第2の実施の形態を用いた処理システムの概略構成を表す側面図、図10は本発明の移動式検査機の第2の実施の形態に備えられた制御演算部550Aのブロック図、図11は本発明の移動式検査機の第2の実施の形態とともに処理システムを構成する移動式処理機の制御系の概略構成を表すブロック図である。図9及び図10における既出図面と同様の部分は、既出図面と同符号を付して説明を省略する。
【0053】
本実施の形態の移動式検査機100Aが第1の実施の形態の移動式検査機100と相違する点は、その検査部50Aの構成と、移動式処理機200との通信手段を設けたことにある。図9に示した処理システムは、移動式処理機200を移動式検査機100Aの前段に配置し、移動式処理機200による処理物(生産物)の品質を検査するものである。本実施の形態は、例えば移動式処理機200を自走式木材破砕機とした場合、破砕木材(木材チップ)が目的の粒度分布に納まっているかどうかを品質の良否判定基準とし、品質不良の破砕木材を除去したり、品質検査の結果を自走式木材破砕機にフィードバックして破砕木材の品質を木目細かく制御したりするのに好適である。
【0054】
図9及び図10に示すように、検査部50Aは、第1の実施の形態の移動式検査機100における検査部とほぼ同位置に設けられており、被検査物の画像を取得する検出部500Aと、検出部500Aで取得された画像データを基に被検査物の品質を判定する制御演算部550A(図10参照)と、移動式処理機200と通信するための通信アンテナ70とを備えている。
【0055】
検出部500Aは、図9に示すように、本体フレーム12上にコンベヤ40を跨ぐようにして固定された枠型の支持架台511と、コンベアベルト44上の被検査物を俯瞰撮影するカメラ512と、カメラ512の撮影箇所を照らす照明513とを備えている。これらカメラ512、照明513、検査コントローラ560A(後述)、通信アンテナ70は、支持架台511に支持されている。
【0056】
カメラ512は、例えばCCDカメラ等で構成することができ、コンベヤベルト44上の被検査物を設定の時間周期で連続的に撮影する。カメラ512により取得された被検査物の画像データは検査コントローラ560Aに出力される。また照明513の光量は、カメラ512の撮影箇所が適当な照度となるように調節される。
【0057】
制御演算部550Aは、図10に示すように、カメラ512からの画像データを基に被検査物の品質を判定する検査コントローラ560Aと、検査コントローラ560Aからの良否判定結果に従って選別装置60を制御する選別装置コントローラ580(第1の実施の形態と同様)とを備えている。
【0058】
検査コントローラ560Aは、検出部500Aのカメラ512からの画像データを記憶する記憶部562Aと、記憶部562Aに記憶された各画像データを画像処理する画像処理部563Aと、画像処理部563Aで抽出された画像データを基に被検査物の品質を判定する判定部564Aとを備えている。
【0059】
画像処理部563Aでは、カメラ512から入力される画像データに、これと同時にパルス検出器47から入力されたパルス信号が対応付けられ、各画像にその画像が取得されたコンベヤベルト44上の位置情報が付されて記憶部562に記憶される。カメラ512で取得される画像データは水平方向に一定の広さを持つ二次元的なデータであるので、この画像の撮影位置のコンベアベルト44上の位置情報と画像内の座標とを基に、画像内の各被検査物のコンベアベルト44上の位置を算出することができる。そして、画像処理部563Aでは、例えば記憶部562Aに記憶された各画像データが二値化処理され、俯瞰した被検査物の個々の粒子の画像データが抽出され、個々の粒子の画像データがその重心位置(或いは代表点)の座標情報とともに記憶部562Aに記憶される。
【0060】
判定部564Aでは、画像処理部563Aで処理された画像データを基に各粒子の大きさを算出し、算出した各粒子の大きさと座標情報を基に被検査物の粒度分布を算出する。また、その形状を基に鎹や釘等の異物も判別される。そして、算出した粒度分布をメインコントローラ590の記憶部592から読み出した設定値(設定粒度)と比較し、設定値よりも粒度が大きな破砕木材や異物が分布する箇所がある場合には、第1の実施の形態と同様、その箇所の情報を選別装置コントローラ580に通知し、選別装置コントローラ580によってコンベヤベルト44上から除去する。
【0061】
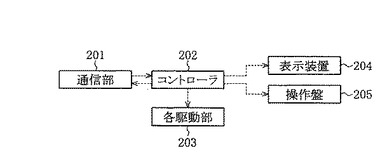
また、上記通信アンテナ70は、通信コントローラ71を介してメインコントローラ590に接続している。通信コントローラ71は、親機(ここでは、移動式処理機200や移動式処理機200に被破砕木材を投入する図示しない油圧ショベル等をさす)の通信部201(図11参照)との接続を確立する際、親機側の通信部201からのブロードキャスト(接続要求信号)に呼応してそれら通信部201と接続する。接続確立後は、親機側から通信部201を介して送信されてくる指令信号を受け、それをメインコントローラ590に出力する。また、制御演算部550Aで異物が判別された場合、通信コントローラ71は、警告信号を生成して通信アンテナ70を介して親機側に送信する。
【0062】
親機から通信コントローラ71に入力される指令信号は、情報送信を命令する信号(情報送信命令)と機械制御を命令する信号(機械制御命令)に大別される。情報送信命令は、移動式検査機100Aの現在の状態、例えばコンベヤ40の搬送速度、燃料残量、被検査物の品質検査結果(粒度分布、画像データ等)の親機側への送信を指令する信号である。機械制御命令は、移動式検査機100Aの構成機器の動作、例えばコンベヤ40の駆動、停止、又は搬送速度、検査部50Aの処理の実行又は停止等を指令する信号である。
【0063】
メインコントローラ590は、通信コントローラ71を介して情報送信命令が入力されると、記憶部562A,592から目的の情報を読み出して通信コントローラ71に出力し、通信コントローラ71は、通信アンテナ70を介してそれを親機に送信する。また、通信コントローラ71を介して機械制御命令が入力されると、メインコントローラ590は、入力された機械制御命令の指令値に準じて制御部591により該当機器(搬送用コントロールバルブ48等)への指令信号を生成し出力する。親機側からの機械制御命令により、移動式検査機100Aの選別装置60を駆動させることもできる。
【0064】
親機(移動式処理機)側では、そのコントローラ202により、受信した移動式検査機100Aからの粒度分布情報を目標粒度と比較し、処理装置や処理装置への被破砕木材の供給装置等を含む各作動装置の駆動部203に指令信号を出力し、破砕物の粒度と移動式検査機100Aからの粒度分布情報との偏差が小さくなるように各作動装置の動作速度を自動的かつ動的に制御する。またコントローラ202は、操作者の所定の操作により操作盤205から出力される操作信号を入力した場合、移動式検査機100Aからの入力情報を表示装置204に表示させる。
【0065】
本実施の形態においても、第1の実施の形態と同様の効果を得ることができる。また、処理システムを構成する他の機械と情報通信し、検査結果を他の機械にフィードバックしたり他の機械と動作を連携したりすることができるので、生産物の品質や作業効率のより一層の向上が期待できる。また、操作者は、表示装置204に品質検査の結果を表示させることによって、親機側で被処理物の処理状態を監視したり、移動式処理機の運転状態を手動で調節したりすることもできる。
【0066】
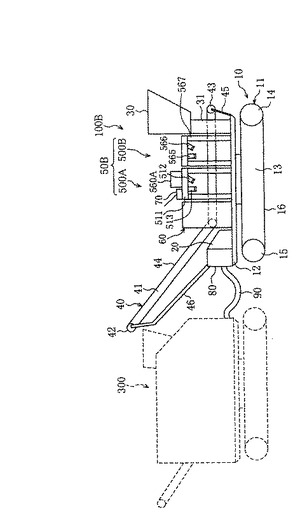
図12は本発明の移動式検査機の第3の実施の形態を用いた処理システムの概略構成を表す側面図である。図12における既出図面と同様の部分は、既出図面と同符号を付して説明を省略する。
【0067】
本実施の形態の移動式検査機100Bが第2の実施の形態の移動式検査機100Aと相違する点は、被検査物の含水率を計測する含水率計測器手段を追加設置したこと、及び外部からの供給動力を受け各機器に分配する動力分配部80を備えたことにある。図12に示した処理システムは、移動式処理機300の前段に移動式検査機100Bを配置して移動式処理機300に供給される被処理物の品質(性状)を処理前に検査し、その結果を基に移動式処理機300における被処理物の処理条件を制御する構成となっている。本実施の形態は、例えば移動式処理機300を自走式土質改良機とした場合、処理対象土砂の含水率に応じて土砂への土質改良材の添加量を制御することで改良土の品質を安定化するのに好適である。移動式処理機300では、移動式検査機100Bのコンベヤ40から放出された検査済みの被処理物(土砂)を受け入れ、これに土質改良材供給装置(図示せず)により土質改良材を添加し、混合装置(図示せず)によって被処理物と土質改良材とを混合処理し改良土として排出する。
【0068】
上記動力分配部80は、動力装置20における下部車体10の他方側(図12中左側)に隣接するように本体フレーム12上に設けられており、動力伝導ケーブル90を介して移動式処理機300の図示しない動力出力部に接続している。動力分配部80は、動力伝導ケーブル90を介して移動式処理機300から供給される電力を入力し、移動式検査機100Bに搭載された各電動装置に供給する。このとき、動力分配部80により、移動式処理機300からの供給電力が動力装置20からの電力と交互に各電動装置に供給される、或いはそれぞれ割り振られた供給先に移動式処理機300からの供給電力と動力装置20からの電力が分配されるようにしても良い。
【0069】
また、本実施の形態における検査部50Bは、検出部500Aに加え、被検査物の含水率を検出する検出部500Bを備えている。検出部500Bは、図12に示すように、本体フレーム12上にコンベヤ40を跨ぐようにして固定された枠型の支持架台567と、コンベアベルト44上の被検査物に電磁波(例えば近赤外線)を照射する電磁波照射器565と、電磁波照射器565から照射された電磁波の反射波(反射成分)を検出する電磁波検出器566とを備えている。電磁波照射器565、電磁波検出器566は、支持架台567により支持されている。また、検出部500B自体はホッパ30と選別装置60の間に位置し、検出部500Aの上流側に設置されている。但し、検出部500A,500Bの位置関係は必ずしも限定されず、検出部500Aの下流側に検出部500Bを設けても良いし、共用の支持架台にカメラ512、照明513、電磁波照射器565、電磁波検出器566を設けて検出部500A,500Bの配置を同じ支持架台に集約しても良い。
【0070】
電磁波照射器565により照射された電磁波は、コンベヤベルト44上の被検査物で反射し、その反射が電磁波検出器566により検出され、制御演算部(図示せず)に出力される。図示しない制御演算部は、図10に示した制御演算部550Aに、電磁波検出器566から入力した電磁波(反射波)の減衰を基にコンベアベルト44上の被検査物の含水率を算出する演算部を追加した構成で、演算部により算出された含水率は、通信コントローラ71、通信アンテナ70を介して移動式処理機300の通信部(図示せず)に送信される。この含水率の送信は、前出の情報送信命令のように移動式処理機300側からの要求に呼応する方式でも良いし、移動式検査機100B側から随時又は一定の時間間隔で送信する方式でも良い。移動式処理機300側では、予め一定品質を確保するために与えられた土砂の含水率に対する土質改良材の添加量の関係の下、移動式処理機300側のコントローラにより、移動式検査機100Bから受け取った被処理物の含水率の情報を基に土質改良材供給装置の駆動速度が制御され、被処理物に対する土質改良材の添加量が調整される。
【0071】
本実施の形態によれば、第2の実施の形態と同様の効果に加え、処理に先駆けて被検査物の含水率の情報を取得することにより、移動式処理機300側の被処理物の処理条件を好適に制御することができる。また、移動式検査機100Bによって移動式処理機300に供給される被処理物から異物を除去することができるので、移動式処理機300の処理装置等における異物の噛み込み等のトラブルを未然に抑制することができる。
【0072】
加えて、別置きの装置、すなわち本実施の形態では移動式処理機300から動力伝導ケーブル90を介して供給された動力を自己の駆動装置に供給することができるので、エネルギー残量に余裕のないとき等には外部からの供給動力で稼動することができる。他の移動式処理機とともに処理システムを構成する本発明の移動式検査機では、ともに処理システムを構成する移動式処理機が近くに配置されるので、このように動力の供給を受けることができる構成とすることで各機のエネルギー効率に応じて柔軟にエネルギーを分配することができる。
【0073】
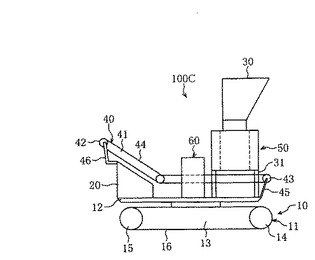
図13は本発明の移動式検査機の第4の実施の形態の概略構成を表す側面図である。図13における既出図面と同様の部分は、既出図面と同符号を付して説明を省略する。
【0074】
本実施の形態の移動式検査機100Cが第1の実施の形態の移動式検査機100と相違する点は、検出部50の設置状態にある。本実施の形態において、検出部50は、開口部504(図2及び図3参照)を上下に向けた姿勢でホッパ30の下部に位置するように支持部材31によって本体フレーム12に支持されている。すなわち、ホッパ30から導出されコンベヤ40上に落下中の被検査物を開口部504に通し、落下中の被検査物の断面画像を取得する。被検査物の断面画像とコンベヤ40上の位置情報との対応付けは、例えば断面画像取得時の検出部50(例えば開口部504の中心)の下方位置を当該断面画像の付属位置情報とする。
【0075】
このような構成としても同様の効果を得ることができる。また、第2及び第3の実施の形態においても、それぞれ検査物500A,500Bを、ホッパ30からコンベヤ40上に落下する被検査物の検査データを検出するように設置しても良い。
【0076】
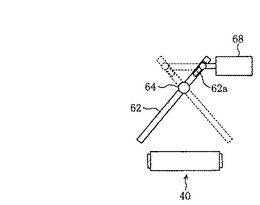
図14は本発明の移動式検査機の第5の実施の形態に備えられた選別装置の要部を抽出して表した概略図である。図14はコンベヤ40による被検査物の搬送方向から見た構成を図示している。本図における既出図面と同様の部分は、既出図面と同符号を付して説明を省略する。
【0077】
本実施の形態の移動式検査機が第1の実施の形態の移動式検査機100と相違する点は、選別装置の構成にある。本実施の形態における選別装置は、図14に示したように選別羽根62は基端部分に支軸64よりも上方に延びる操作部62aを有しており、この操作部62aにほぼ水平な姿勢のシリンダ68(油圧でも電動でも可)のロッド先端部を回動自在に連結することにより、シリンダ68の伸縮動作に伴って選別羽根62が往復揺動する構成である。選別羽根62の揺動範囲はシリンダ68の伸縮量による。シリンダ68は、第1の実施の形態における駆動モータ65(図5及び図6参照)に相当する。このような装置構成としても、同様の効果を得ることができる。
【0078】
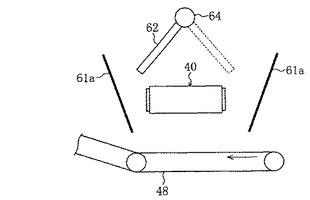
図15は本発明の移動式検査機の第6の実施の形態に備えられた選別装置の要部を抽出して表した概略図である。図15はコンベヤ40による被検査物の搬送方向から見た構成を図示している。本図における既出図面と同様の部分は、既出図面と同符号を付して説明を省略する。
【0079】
本実施の形態の移動式検査機が第1の実施の形態の移動式検査機100と相違する点は、選別装置の構成にある。本実施の形態における選別装置は、図15に示したようにコンベヤ40の幅方向の両側に位置する筐体61aの両側面の内壁部が下方に向かって縮径するシュート状に形成されている。この筐体61aの下部開口の下方には、コンベヤ40による被検査物の搬送方向(紙面直交方向)にとった寸法が筐体61aの下部開口よりも幅広のコンベヤベルトを有するサイドコンベヤ48が、コンベヤ40と直交する方向に延在している。
【0080】
つまり、第1の実施の形態では選別羽根62で選別された被検査物がシュート63で機外に外出される構成であったのに対し、本実施の形態では選別された被検査物がサイドコンベヤ48により良品と分別されて排出される構成である。サイドコンベヤ48は上り傾斜になっており排出高さが確保されている。またサイドコンベヤ48の実質的な構成はコンベヤ40とほぼ同様である。
【0081】
さらに、本実施の形態の場合、筐体61aの両側壁がコンベヤ40からサイドコンベヤ48に対して選別された被検査物を導くガイド手段として機能するので、選別羽根62の往復動作のどちらの動作で払い除けられた被検査物も安定にサイドコンベヤ48上に導かれる。このような装置構成としても、同様の効果を得ることができる。
【0082】
図16は本発明の移動式検査機の第7の実施の形態に備えられた選別装置の要部を抽出して表した概略図である。図16は側面側から見た構成を示している。本図における既出図面と同様の部分は、既出図面と同符号を付して説明を省略する。
【0083】
本実施の形態の移動式検査機が第1の実施の形態の移動式検査機100と相違する点は以下に説明する3点である。
【0084】
第1の相違点は、ホッパ30で受け入れた被検査物を搬送し良品を搬出するコンベヤが、ホッパ30と検出部50をカバーする上流側コンベヤ40a、及び選別装置により選別された良品を排出する下流側コンベヤ40bに分割されていることにある。これらコンベヤ40a,40bは、ともに本体フレーム12や動力装置20により適宜支持されている。上流側コンベヤ40aは、ホッパ30の下方から検出部50を通過する位置まで水平に延在している。下流側コンベヤ40bは、上流側コンベヤ40aの放出端の下方位置から上流側コンベヤ40aによる被検査物の搬送方向下流側に向かって上り傾斜に延在している。下流側コンベヤ40bの放出端の高さは第1の実施の形態におけるコンベヤ40と同程度である。
【0085】
第2の相違点は、選別装置により選別された不良品を良品と分別して排出するコンベヤ49を追加したことにある。コンベヤ49は、本体フレーム12により吊り下げ支持されている。コンベヤ49は、上流側コンベヤ40aの放出端の下方位置(本例では下流側コンベヤ40bの上流端よりも下方位置)から上流側コンベヤ40aによる被検査物の搬送方向上流側にほぼ水平に延在している。但し、コンベヤ49の延在方向は、下流側コンベヤ40bと互いの搬送する被検査物が分別して搬出される限りにおいては限定されない。機体側方に延在させる場合は上り傾斜としても良い。
【0086】
第3の相違点は、選別装置の構成にある。本実施の形態における選別装置は、図16に示したように選別板69が上流側コンベヤ40aと下流側コンベヤ40bとの間に斜め上方から抜き差し可能に構成されている。選別板69は、その先端部が上流側コンベヤ40aの放出端の前方側(図16中の左側)上方位置から同じく上流側コンベヤ40aの放出端の後方側(図16中の右側)下方位置まで移動するようにその面方向にスライドし、上限位置(実線参照)にあるときは上流側コンベヤ40aから放出される被検査物の流れから退避し、下限位置(点線参照)にあるときは上流側コンベヤ40aから放出される被検査物を遮るようになっている。詳細には図示していないが、選別板69は、筐体61に支持されたシリンダ等の駆動装置により図示した方向にスライドするようになっている。この駆動装置は、良品と判定された被検査物が上流側コンベヤ40aから放出される際には実線の位置に、不良品と判定された被検査物が上流側コンベヤ40aから放出される際には点線の位置にそれぞれ選別板69が移動するように制御される。
【0087】
すなわち、本実施の形態では、良品と判定された被検査物は上流側コンベヤ40aから放出されて下流側コンベヤ40bに移行して下流側コンベヤ40bから放出され、不良品と判定された被検査物は選別板69に遮られコンベヤ49上に導かれる。このような装置構成としても、同様の効果を得ることができる。
【0088】
図17は本発明の移動式検査機の第8の実施の形態に備えられた選別装置の要部を抽出して表した概略図である。図17は上方向から見た構成を図示している。本図における既出図面と同様の部分は、既出図面と同符号を付して説明を省略する。
【0089】
本実施の形態の移動式検査機が第1の実施の形態の移動式検査機100と相違する点は、選別装置の構成にある。本実施の形態における選別装置60Aは、所定の大きさの粒子を把持選別することができる多関節型のロボットアームで構成されている。この選別装置60Aは、検出部500の下流側部分にてコンベアベルト44の傍らに位置するように本体フレーム12上に設置され、不良と判定された被検査物の粒子を把持してコンベアベルト44上から取り除き、機外例えば機体側方の定位置に排出する。X線断面撮像装置を検出部に用いた場合、第1の実施の形態で説明したように粒子単位で品質の良否及びその位置が精度良く特定できるので、本例のようにロボットアームにより目標の品質を満足しない不良品を粒子単位で選別除去することができる。これにより、不良品とともに除去される良品の量を効果的に抑制することができる。
【0090】
なお、以上において、コンベヤ40上の被検査物の搬送量(例えばコンベヤベルト44上の被検査物の山の断面積)を調整する手段について得に説明しなかったが、コンベヤ40を一定速度に保ったまま被検査物の搬送量を調整する手段を設けることもできる。例えばホッパ30の下部をコンベヤベルト44に摺接するか近接する程度に近付け、搬送方向下流側のホッパ30の前壁部分にコンベヤベルト44に対向する被検査物出口を設ける構成とした場合、被検査物出口の開口面積(開口高さ)を調整するゲートをホッパ30に設けることで、コンベヤベルト44上の被検査物の断面積を制御して搬送量を調整することができる。開口面積を一定とすることで、定量供給が実現できる。
【0091】
また、各実施の形態の移動式検査機や、これとともに処理システムを構成する移動式処理機は、自力走行可能な下部車体(走行装置)を備えた自動式の機械とすることができるが、例えば非駆動の単なる台車状の下部車体を有し、牽引走行可能なタイプのものとしても良い。また、各実施の形態では、上流側に対して下流側が上り傾斜に屈曲したコンベヤ40を例に挙げて説明したが、ホッパ30の下方位置から放出端に向かって直線的に上り方向に傾斜したコンベヤとすることもできる。
【0092】
また、各実施の形態において移動式検査機とともに処理システムを構成する移動式処理機として、コンクリートガラ等の岩石材料を破砕する移動式破砕機(ジョークラッシャ等)、被破砕木材を破砕して木材チップを生産する移動式木材破砕機、土砂材料に土質改良材を混合して改良土を生成する移動式土質改良機等を例に挙げたが、これらに限られず、家電製品やゴムタイヤ、畳等の各種被破砕物を剪断破砕する移動式シュレッダの他、移動式インパクトクラッシャや移動式ロールクラッシャ、或いは補器的に使用される移動式スクリーン、移動式コンベヤ等とも処理システムを構成可能であり、それらの受け入れる被処理物又は排出する処理物を対象として、品質判定のパラメータとする項目の特徴量を検査して良否判定することができる。
【図面の簡単な説明】
【0093】
【図1】本発明の移動式検査機の第1の実施の形態の概略構成を表す側面図である。
【図2】本発明の移動式検査機の第1の実施の形態に備えられた検査部の側面図である。
【図3】図2中のIII−III断面による断面図である。
【図4】本発明の移動式検査機の第1の実施の形態に備えられた制御演算部の構成を表すブロック図である。
【図5】本発明の移動式検査機の第1の実施の形態に備えられた選別装置の側面図である。
【図6】図5のVI−VI断面による断面図である。
【図7】本発明の移動式検査機の第1の実施の形態に備えられた画像処理部による画像処理アルゴリズムの一例を表すフローチャートである。
【図8】本発明の移動式検査機の第1の実施の形態に備えられた判定部による良否判定アルゴリズムの一例を表すフローチャートである。
【図9】本発明の移動式検査機の第2の実施の形態を用いた処理システムの概略構成を表す側面図である。
【図10】本発明の移動式検査機の第2の実施の形態に備えられた制御演算部のブロック図である。
【図11】本発明の移動式検査機の第2の実施の形態とともに処理システムを構成する移動式処理機の制御系の概略構成を表すブロック図である。
【図12】本発明の移動式検査機の第3の実施の形態を用いた処理システムの概略構成を表す側面図である。
【図13】本発明の移動式検査機の第4の実施の形態の概略構成を表す側面図である。
【図14】本発明の移動式検査機の第5の実施の形態に備えられた選別装置の要部を抽出して表した概略図である。
【図15】本発明の移動式検査機の第6の実施の形態に備えられた選別装置の要部を抽出して表した概略図である。
【図16】本発明の移動式検査機の第7の実施の形態に備えられた選別装置の要部を抽出して表した概略図である。
【図17】本発明の移動式検査機の第8の実施の形態に備えられた選別装置の要部を抽出して表した概略図である。
【符号の説明】
【0094】
10 走行体
11 走行装置
20 動力装置
30 ホッパ
40 コンベヤ
40a 上流側コンベヤ
40b 下流側コンベヤ
48 サイドコンベヤ
49 コンベヤ
50 検査部
50A,B 検査部
60,60A 選別装置
61 筐体
62 選別羽根
63 シュート
64 支軸
65 駆動モータ
66,67 リミットスイッチ
69 選別板
70 通信アンテナ
71 通信コントローラ
80 動力分配部
90 動力伝導ケーブル
100,100A〜C 移動式検査機
200 移動式処理機
201 通信部
202 コントローラ
203 駆動部
300 移動式処理機
500,500A,B 検出部
501 筐体
502 X線照射部
503 X線検出部
512 カメラ
513 照明
550,550A 制御演算部
560,560A 検査コントローラ
561 CT合成部
562,562A 記憶部
563,563A 画像処理部
564,564A 判定部
565 電磁波照射器
566 電磁波検出器
580 選別装置コントローラ
590 メインコントローラ
591 制御部
592 記憶部
595 操作部
P 粒子
C 重心座標
【技術分野】
【0001】
本発明は、被処理物の発生現場にて移動式処理機に供給される被処理物又は移動式処理機で処理された処理物を検査する移動式検査機に関する。
【背景技術】
【0002】
岩石やビル解体に伴うコンクリートガラを破砕処理する破砕処理や建設発生土に土質改良材を混合処理する土質改良処理等、被処理物に所定の処理を施す処理プラントは従前より様々なものが存在する。こうした固定式の処理プラントにおいては、処理物の品質を高めるために、一連の処理工程の中に検査工程を置くことがある。被処理物(コンクリートガラ)から再生骨材を製造するのに、処理前の被処理物をCCDカメラで撮影し、撮影により取得した色調データを基に被処理物の品質を推定し破砕機の運転条件を調整するもの(特許文献1等)等がその一例である。
【0003】
【特許文献1】特開2006−167646号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
近年、自走式、牽引走行式等を含む移動式処理機(例えば、自走式破砕機や自走式土質改良機)が数多く開発されている。こうした移動式処理機は発生現場に搬入して被処理物の近くで運転することができることが大きなメリットであり、大量の被処理物を現場から離れた処理プラントで処理する場合に比べ、被処理物の運搬が不要であるため処理費用の大幅な低減が可能である。
【0005】
しかしながら、移動式処理機はトレーラ等による輸送性を確保するため一般道路の輸送制限により大きさが制約され、搭載する各機器が固定式処理プラントのそれに比べて必然的に小型になる。そのため、移動式処理機は、一般的に大量の被処理物を処理する上では固定式の処理プラントに比較して不利である。
【0006】
そこで本発明は、移動式処理機により生成される処理物の品質向上に寄与することができる移動式検査機を提供することを目的とする。
【課題を解決するための手段】
【0007】
(1)上記目的を達成するために、本発明は、被処理物の発生現場にて移動式処理機に供給される被処理物又は前記移動式処理機で処理された処理物を被検査物として検査する移動式検査機であって、下部車体と、前記下部車体上に設けた動力装置と、前記下部車体上の一方側に設けた被検査物の受け入れ部と、前記受け入れ部の下方位置から前記下部車体の他方側に向かって延在したコンベヤと、前記受け入れ部を介して受け入れた被検査物の検査データを検出する検出部と、前記コンベヤ上の前記検出部よりも下流側の位置に設けられ、被検査物を前記コンベヤ上から除去し選別する選別装置と、被検査物の良否判定の基準とする特徴量に対し目標品質に応じて予め設定した設定値を記憶した記憶部と、前記検出部で検出された検査データを基に算出された被検査物の前記特徴量を前記記憶部から読み出した設定値と比較し、前記コンベヤ上の被検査物の品質の良否を判定する判定部と、前記判定部から入力された品質不良の被検査物の情報を基に前記選別装置を制御し、前記コンベヤにより搬送される品質不良の被検査物を良品と分別する選別装置コントローラとを備えたことを特徴とする。
【0008】
(2)上記(1)において、好ましくは、被検査物の断面画像を前記検査データとして取得するX線断面撮像装置を有する前記検出部と、前記検出部で取得された複数の断面画像から被検査物の各粒子の各断面画像を抽出する画像処理部と、前記画像処理部により抽出された個々の粒子の各断面画像を基に被検査物の各粒子の質量を前記特徴量として算出し、算出した特徴量を前記設定値と比較して被検査物の品質の良否を判定する前記判定部とを備えたことを特徴とする。
【0009】
(3)上記(1)において、好ましくは、前記コンベヤ上の被検査物の俯瞰撮影画像を前記検査データとして取得するカメラを有する前記検出部と、前記検出部で取得された画像を基に前記特徴量として算出された被検査物の粒度分布を前記設定値と比較して被検査物の品質の良否を判定する前記判定部とを備えたことを特徴とする。
【0010】
(4)上記(1)において、好ましくは、前記コンベヤ上の被検査物に向けて照射した電磁波の反射成分を前記検査データとして取得する電磁波検出器を有する前記検出部と、前記検出部で取得された電磁波を基に前記特徴量として算出された被検査物の含水率を前記設定値と比較して被検査物の品質の良否を判定する前記判定部とを備えたことを特徴とする。
【0011】
(5)上記(1)において、好ましくは、前記移動式処理機に備えられた通信部との間で検査結果及び制御信号を授受する通信部を備えたことを特徴とする。
【発明の効果】
【0012】
本発明によれば、移動式処理機により生成される処理物の品質向上に寄与することができる。
【発明を実施するための最良の形態】
【0013】
以下に図面を用いて本発明の実施の形態を説明する。
本発明の移動式検査機は、被処理物の発生現場にて移動式処理機械とタンデムに配置して処理システムを構成し、移動式処理機に供給される被処理物又は移動式処理機で処理された処理物を検査(非破壊検査)するのに好適である。
【0014】
図1は本発明の移動式検査機の第1の実施の形態の概略構成を表す側面図である。
第1の実施の形態に係る移動式検査機は、移動式処理機の前段又は後段に配置することで、処理工程の一連の流れの中で被検査物(被処理物又は処理物)の品質を検査することができるものであり、例えば自走式破砕機等の移動式破砕機(ジョークラッシャ)の後段に配置した場合、移動式破砕機で破砕したコンクリートガラを検査して品質に応じて選別することで、製品としての再生路盤材の品質向上に寄与する。
【0015】
図1に示したように、本実施の形態の移動式検査機100は、下部車体としての走行体10と、搭載した各機器に動力を供給する動力装置20と、被検査物を受け入れる受け入れ部としてのホッパ30と、被検査物を搬送する搬送手段であるコンベヤ40と、被検査物の品質を検査する検査部50と、コンベヤ40上の品質不良の被検査物を選別する選別装置60とを備えている。
【0016】
走行体10は、左右一対の走行装置11、及び走行装置11の上部にほぼ水平に設けた一対の本体フレーム12で構成されている。走行装置11は、本体フレーム12の下部に連設したトラックフレーム13と、トラックフレーム13の前後両端に設けた従動輪(アイドラ)14及び駆動輪15と、従動輪14及び駆動輪15に掛け回した無限軌道履帯16と、駆動輪15に連結した図示しない駆動装置とを備えている。また、本体フレーム12とトラックフレーム13を旋回フレーム(図示せず)及び旋回モータ(図示せず)を介して接続し、旋回モータを駆動することによって本体フレーム12がトラックフレーム13に対して旋回する構成としても良い。
【0017】
ホッパ30は、上方拡開形状に形成され上下が開口した枠型の部材であり、支持部材31を介して本体フレーム12の長手方向一方側(図1中右側)に支持されている。
【0018】
コンベヤ40は、ホッパ30の下方位置から走行体10の他方側(図1中の左側)に向かって延在しており、ホッパ30の下方位置から本体フレーム12の長手方向一方側に向かって水平に延在し、検査部50、選別装置60を通過した後の下流側の部分は屈曲している。この屈曲後の下流側の部分は、動力装置20の上方を通過し、搬送方向に向かって上る方向に傾斜している。また、コンベヤ40は、コンベヤフレーム41と、コンベヤフレーム41の前後両端に設けた駆動輪42及び従動輪43と、駆動輪42及び従動輪43に掛け回したコンベヤベルト44と、駆動輪42に連結した図示しない駆動装置とを備えている。コンベヤフレーム41は、支持部材45,46を介してそれぞれ本体フレーム12及び動力装置20に支持されている。本実施の形態において、コンベヤ40は、全体が本体フレーム12より上側に位置しているが、本体フレーム12よりも下方を通し、ホッパ30の下方位置から来て動力装置20の下を通過する辺りから上り傾斜になるように、本体フレーム12や動力装置20から吊り下げる構成としても良い。また、コンベヤベルト44は、対向するホッパ30から導出される被検査物のこぼれを抑制すべく、ホッパ30の下部開口よりも幅を広くしてある。
【0019】
また、図1では特に図示していないが、コンベヤ40の例えばコンベアベルト44の内側の空間には、コンベアベルト44の位置を検出するパルス検出器47(後述する図4参照)が設けられている。パルス検出器47は、例えばLED等からの照射光や音の反射成分を検出する方式のものを用いることができる。この場合、コンベヤベルト44の搬送面の裏側に一定間隔の既知の数の凹凸を形成しておき、そこに照射した光や音の反射成分を検出してパルス変換して出力するようにすると、パルス信号のカウントによってコンベヤベルト44の循環移動量が算出される。また、予め各凹凸にアドレスを与えておけば、コンベアベルト44の各点の現在位置を算出することもできる。
【0020】
動力装置20は、本体フレーム12の長手方向他方側(図1中左側)端部に支持されており、特に図示していないが、エンジン(原動機)やエンジンにより駆動する油圧ポンプ、油圧ポンプからの圧油の流れを制御する制御弁装置等を内蔵している。同じく図示していないが、移動式検査機100には、例えば動力装置20の内部或いは動力装置20の近傍に電源(バッテリ)が設けられている。
【0021】
図2は検査部50の側面図、図3は図2中のIII−III断面による断面図である。
図2において、本実施の形態の検査部50は、被処理物の断面画像を取得して画像処理し良品か不良品かを判断し選別する機能を果たす箇所であり、被検査物の画像を取得する検出部500と、検出部500で取得した画像に基づく被検査物の良品判定結果に応じて選別装置60を駆動制御する制御演算部550(後の図4参照)とを備えている。
【0022】
検出部500はX線断面撮像装置であり、検出部500の本体をなす筐体501と、X線を照射するX線照射部502と、X線照射部502から照射されたX線を検出するX線検出部503とを備えている。筐体501は、中央部分に円筒状に形成された開口部504を有するドーナツ状の箱型部材である。開口部504には、コンベヤ40が貫通しており、コンベヤ40により搬送される被検査物がコンベヤ40の搬送速度で開口部504を通過するようになっている。このとき、搬送する被検査物が開口部504の中心を通過するように、コンベヤ40は、コンベヤベルト44の搬送面が開口部504の中心よりも下側に設定距離だけオフセットするように配置されている。また、開口部504には、X線照射部502のコンベヤ搬送方向の上流側及び下流側に、筐体501からのX線の漏洩を防ぐカーテン506を設けてある。
【0023】
上記X線照射部502及びX線検出部503は、筐体501内でリング状のガントリ505によって連結されており、特に図示していないが、筐体501の外側の内壁面に設けたリング状(開口部504と同心状)の図示しないガイドレールにスライド可能に係合している。これらX線照射部502及びX線検出部503は、筐体501の開口部504の中心を挟んで対向している。また、特に図示していないが、ガントリ505には、X線照射部502及びX線検出部503が係合するガイドレールに沿って走行する駆動装置が取り付けられている。この駆動装置を駆動することにより、リング状のガイドレールを駆動装置が走行し、対向配置されたX線照射部502とX線検出部503とが、ガントリ505とともに筐体501内で開口部504の中心周りに回転する。この回転動作に伴ってX線照射部502からX線を照射することにより、コンベヤ40上を搬送される被処理物Aを透過したX線がX線検出部503で検出されるようになっている。X線照射量は断面画像の撮像をする上で必要最小限に抑えることが望ましい。
【0024】
図4は制御演算部550の構成を表すブロック図である。
図4において、制御演算部550は、検出部500のX線検出部503からの検出信号を基に被検査物の品質を判定する検査コントローラ560と、検査コントローラ560からの良否判定(詳細は後述)の結果に従って選別装置60を制御する選別装置コントローラ580とを備えている。
【0025】
検査コントローラ560は、検出部500のX線検出部503からのX線検出信号を基に検出部500を通過した被検査物の断面画像を合成(構築)するCT合成部561と、合成した画像データを記憶する記憶部562と、記憶部562に記憶された各合成画像を処理し被検査物の個々の粒子の断面画像データを抽出する画像処理部563と、画像処理部563で抽出された断面画像データを基に被検査物の個々の粒子の品質を判定する判定部564とを備えている。
【0026】
選別装置コントローラ580は、コンベヤ40に設けたパルス検出器47からのパルス信号を入力し、この入力信号を基にコンベヤベルト44の位相を演算し監視している。このとき、選別装置コントローラ580に入力されるパルス信号は、選別装置コントローラ580を介して随時検査コントローラ560にも入力される。CT合成部561では、X線検出部503から入力されるX線検出信号に、これと同時に入力されたパルス信号が対応付けられ、合成する断面画像にその断面画像が取得されたコンベヤベルト44上の位置情報が付される。したがって、記憶部562には、コンベヤベルト44上の位置情報付きの被検査物の断面画像が蓄積される。すなわち、判定部564から出力される被検査物の良否判定結果には、その判定の基となった断面画像の位置情報が伴う。
【0027】
これにより、選別装置コントローラ580では、判定部564からの良否判定結果を基にコンベアベルト44上の被検査物を除去すべきか否かを認識し、除去すべき被検査物(不良品)については、そのコンベアベルト44上の位置情報と自己で管理しているコンベアベルト44の位相とに基づき、不良品が選別装置60を通過する際に選別装置60に駆動指令信号を出力して不良品をコンベアベルト44上から除去する。
【0028】
なお、検査コントローラ560の記憶部562には、少なくとも検出部500の撮像位置から選別装置60を通過するまでの断面画像及びその位置情報が入る容量が要求される。容量が多い分には機能上問題ないが、最小限の容量に止める場合はデータ蓄積量が一定の値を超えた後、古いデータを記憶した領域から順にデータを上書きしていくようにする。
【0029】
また、移動式検査機100には、制御演算部550とは別に移動式検査機100の全体を制御するメインコントローラ590が設けられている。このメインコントローラ590は、走行系や搬送系等の動作を制御する制御部591の他、判定部564における被検査物の品質の判定基準となる設定値を記憶する記憶部592を有する。制御部591は、操作者による操作に伴う操作部595からの操作信号を基に、走行系や搬送系等への指令信号を演算し出力する。本例では、走行用、搬送用の駆動装置(図示せず)にそれぞれ油圧モータを想定しているので、制御部591から走行系、搬送系に出力される指令信号は、走行体10の走行モータ、コンベヤ40のコンベヤモータへの圧油の流れ(流量及び方向)をそれぞれ制御する走行用コントロールバルブ17、搬送用コントロールバルブ48のソレノイド駆動部に対する指令信号である。電動モータ等を用いて走行系、搬送系を電動式にした場合、制御部591から走行系、搬送系に出力される指令信号は、走行体10の走行モータ、コンベヤ40のコンベヤモータの制御部に出力される構成となる。
【0030】
また、メインコントローラ590の記憶部592に記憶される設定値は、各被検査物の検査対象項目(品質判定の基準、換言すれば品質を評価するパラメータとなる項目)に対して目標品質に応じて予め設定された制御しきい値である。判定部564は、前述の良否判定の際、この記憶部592から該当の設定値を読み出し、画像処理部563からの画像処理結果を設定値と比較して良否判定する。なお、本例では、被検査物の断面画像を画像処理して粒子単位の断層像を抽出することができるので、各粒子の質量(後述)、外径(形や大きさ)、体積、位置、粒度分布、球形度、球形度分布等を精度良く算出することができる。例えば粒度を品質の判定基準とする場合、特徴量として粒子の外径を算出し、それに対して目標品質(目標粒度)に準ずる設定値を設定しておけば、その設定値との比較により品質を判定することができる。質量や体積、分布等の他の項目についても同様である。
【0031】
図5は選別装置60の側面図、図6は図5のVI−VI断面による断面図である。
選別装置60は、コンベヤ40上の検出部500よりも搬送方向下流側の位置に設けられており、コンベヤ40を覆うように設けた装置本体をなす筐体61と、被検査物をコンベヤベルト44上から選別し除去する選別羽根62と、選別羽根62で選別された被検査物をガイドするシュート63とを備えている。
【0032】
筐体61は、コンベヤ40による被検査物の搬送方向両側が開口した枠型の部材であり、本体フレーム12上に搭載されている。
【0033】
選別羽根62は、コンベヤベルト44の上方に位置するように、基端部(上端部)が筐体61の天井部に支軸64を介して回動自在に支持されている。支軸64は選別羽根62に対して固定されており、筐体61の例えば上部に搭載した電動の駆動モータ65(油圧でも良い)の出力軸に、駆動伝達機構(スプロケット、ギヤ等)を介して連結されている。この駆動モータ65は前述した選別装置コントローラ580からの駆動指令信号により駆動する。支軸64は被検査物の搬送方向に延在しており、駆動モータ65が駆動すると支軸64の回転に伴って選別羽根62はコンベアベルト44に直交する方向に揺動する。
【0034】
このとき、選別羽根62の揺動するストロークはリミットスイッチ66,67により制限されている。通常時、選別羽根62が先端部をコンベヤベルト44の幅方向一方側(図6中左側)にある位置で待機しているが、選別装置コントローラ580からの駆動指令信号が駆動モータ65に入力されると、駆動モータ65が駆動して選別羽根62がコンベヤベルト44の幅方向他方側(図6中右側)に揺動する。その後、選別羽根62が進行方向に対向するリミットスイッチ67を押すと、リミットスイッチ67からの信号が選別装置コントローラ580に入力される。リミットスイッチ67からの信号が入力されると、選別装置コントローラ580は駆動モータ65への駆動指令信号を逆転駆動の指令信号に切り換え、選別羽根62をコンベアベルト44の幅方向一方側に揺動させる(復帰させる)。その後、選別羽根62がリミットスイッチ66に到達し、リミットスイッチ66からの信号が選別装置コントローラ580に入力されると、選別装置コントローラ580は駆動モータ65への駆動指令信号の出力を停止し待機位置で停止させる。このようにリミットスイッチ66,67と組み合わせて選別羽根62を往復揺動させる場合、駆動モータ65に直流モータを用いることができる。リミットスイッチ66,67を省略し、駆動モータ65にサーボモータ等の回転角度を精度良く制御できるものを用い、選別羽根62を所定角度で折り返し往復揺動させるようにしても良い。
【0035】
また、選別羽根62の長さは、先端部(下端部)の軌跡がコンベアベルト44の搬送面に摺接又は近接する程度に調節されている。したがって、選別羽根62が待機位置から揺動すると、選別羽根62に干渉するコンベヤベルト44上の被検査物が側方に押し退けられ、シュート63に落とされる。選別羽根62は上記の如く往復運動するため、選別対象の被検査物をシュート63に向かって掻き落とした後、速やかに待機位置に復帰する。
【0036】
シュート63のシュート面(被検査物が滑り落ちる面)は、少なくとも被検査物を受け入れる部分においては、コンベヤ40による被検査物の搬送方向にとった寸法が選別羽根62よりも大きい。つまり、シュート63の上流側端部は選別羽根62の上流側端面よりも上流側に位置し、シュート63の下流側端部は選別羽根62の下流側端面よりも下流側に位置する。シュート63は、そのシュート面の上端部がコンベヤベルト44の選別羽根62の回動方向一方側(本例では図6中の右側)の側部に近接し、そこから下り傾斜となる姿勢で筐体61に支持されている。筐体61には、シュート63のシュート面に対向する図示しない開口部が設けられており、シュート63を流れ落ちる被検査物が開口部を通って筐体61の外部に排出される。このようにして、判定部564により品質不良と判定された被検査物は、選別装置60により選別されコンベヤ40上から取り除かれるようになっている。
【0037】
次に上記構成の本実施の形態の移動式検査機100の動作を説明する。
まず、移動式検査機100を現場内で適宜走行させ所定の位置に設置する。ここでは一例として、自走式破砕機(ジョークラッシャ)の後段に配置して自走式破砕機から排出される破砕物の粒単体の質量を検査し、破砕物の粒単体が目標質量以下となるように破砕処理されているかどうかを基準に良否判定する場合を説明する。
【0038】
自走式破砕機の排出コンベヤから放出された被検査物(破砕物)は、ホッパ30に導入され、ホッパ30を介してコンベヤ40上に導かれる。被検査物は、循環駆動するコンベヤ40により搬送され、検出部500を通過する。検出部500を通過する際、被検査物の断面画像が撮像され、制御演算部550において断面画像を基に被検査物の品質が良否判定される。その結果、良品と判定された被検査物はそのまま搬送され、選別装置60を通過して最終的にコンベヤ40の放出端から放出される。一方、制御演算部550により品質不良と判定された被検査物は、選別装置60に導入された際に選別羽根62によりコンベヤベルト44上から払い除けられ、シュート63を介して良品と分別されて排出される。
【0039】
ここで、図7は画像処理部563による画像処理アルゴリズムの一例を表すフローチャートである。
【0040】
画像処理部563は、まずCT合成部561で合成された被検査物のコンベヤ40上の特定位置の断面画像nを記憶部562から読み出して(ステップS101)、断面画像nの各画素の輝度を予め設定された閾値し二値化処理し(ステップS102)、輝度の高い空間部分を除去し輝度が閾値よりも低い粒子Pm,Pm+1,・・・の画像データを抽出する(ステップS103)。
【0041】
次に、粒子Pm,Pm+1,・・・のうち、ステップS103で抽出した画像データを基に断面画像上の座標系での粒子Pmの重心座標Cmを算出する(ステップS104)。粒子Pmの重心座標Cmを算出したら、断面画像nの1つ前(上流側の隣接位置)の解析済みの断面画像n−1に粒子Pmと重心座標が近い(予め設定した距離(閾値)以内にある)粒子を検索し(ステップS105)、該当粒子があるかどうかを判定する(ステップS106)。
【0042】
該当粒子がある場合、断面画像n−1の該当粒子の粒子番号を粒子Pmに割り当ててステップS109に手順を進める(ステップS107)。該当粒子がない場合、新規の粒子番号を粒子Pmに割り当ててステップS109に手順を進める(ステップS108)。ステップS109では、ステップS103で抽出した粒子の全てについて、ここまでの処理が完了したかどうかを判定し、同様の処理が未完了な粒子がある場合、手順をステップS104に戻し、断層像n中の次の粒子Pm+1を対象として同じ手順を繰り返す。断面画像n中の全粒子についてここまでの処理が完了した場合、手順をステップS110に移行する。
【0043】
ステップS110に手順を移すと、画像処理部563は、断面画像n−1中にあって断面画像nには存在しない粒子番号が付与された粒子を検索し、ステップS111において該当粒子があるかどうかを判定する。ここで発見される該当粒子は、その全ての断面画像について解析が完了した粒子である。該当粒子がある場合、ステップ112の手順を経由し、該当粒子の各断面の解析結果(断面画像やその重心座標等)を記憶部562に記憶し、この該当粒子の解析が完了した旨を伝える信号を判定部564に出力し、ステップS113に手順を移す。ステップS111で該当粒子が見つからない場合、ステップS112を介さずそのままステップS113に手順を移す。ステップS113では、断面画像nについて以上の解析処理を完了し、断面画像nの1つ後(下流側の隣接位置)の未解析の断面画像n+1を解析対象に変え(n=n+1とし)、ステップS101に手順を戻す。
【0044】
このように、画像処理部563は、コンベヤ40が駆動している間、ステップS101〜S113の処理を繰り返し実行し、連続して撮像されるコンベヤ40上の被検査物の断面画像を順次解析処理し、粒毎のスキャンデータを記憶部562に記録する。
【0045】
また、図8は判定部564による良否判定アルゴリズムの一例を表すフローチャートである。
本例において、判定部564は画像処理部563で抽出された粒子の各画像データを基に、粒子毎にその特徴量、例えば質量、体積、球形度等の情報を取得し、各粒子の座標データ等と合わせて粒度分布や粒質量分布、球形度分布等を算出することができる。そして、これらのうち良否判定に用いる特徴量を、良否判定の基準として予めメインコントローラ590の記憶部592に記憶した設定値(閾値)と比較し、品質の良否判定を粒子毎に実行する。
【0046】
すなわち、判定部564は、まず先のステップS112の手順で画像処理部563からスキャン完了の信号を入力したら(ステップS201)、その信号に対応する粒子番号の粒子の各断面画像データの集合を記憶部562から読み出す(ステップS202)。断面画像の画像データを読み出したら、その画像1枚1枚について各画素の濃淡(輝度)を質量に変換し、現在判定の対象としている粒子の各断面画像につき、各画素の質量変換値の合計値をそれぞれ算出する(ステップS203)。このステップS203における輝度から質量への変換処理は、予め実測する等して求めておいた画素の輝度と質量との関係に基づいて実行される。
【0047】
続くステップS204に手順を移すと、判定部564は、現在判定の対象としている粒子の全ての断面画像につき、質量変換値の合計値の算出が完了したかどうかを判定し、質量変換値の合計値が得られていない画像が残っていればステップS203に手順を戻す。ステップS204で当該粒子の全画像について質量変換値の合計値の算出が完了していれば、次のステップS205に手順を移し、各画像の合計質量変換値の合計値を算出し、現在判定の対象としている粒子の質量を推定する。
【0048】
対象の粒子単体の質量を算出したら、判定部564は、メインコントローラ590の記憶部592から読み出した設定値(目標粒度に準ずる)と算出値とを比較し、算出値が設定値以下であるかどうかを判定する(ステップS206)。算出値が設定値より大きければ、判定部564は現在判定の対象としている粒子は品質不良と判断して手順をステップS207に移し、その粒子のコンベヤベルト44上の位置を選別装置コントローラ580に通知する。粒子の質量の算出値が設定値以下で、ステップS206の判定が満たされた場合、判定部564は選別装置コントローラ580への通知を省略して図8の判定の手順を終了する。
【0049】
判定部564は、画像処理部563からスキャン終了の通知を受けたら、それらの粒子のそれぞれを対象として、以上のステップS201〜S207の処理を逐次実行する。選別装置コントローラ580は、ステップS207で出力された粒子の位置情報を受けたら、そのコンベアベルト44上の位置が選別羽根62による払い除け位置に到達する際に選別装置60を駆動させ、品質不良と判定された粒子をコンベアベルト44上から除去する。設定粒度以下の粒子については粒子位置が通知されないので、その付近に品質不良の粒子がなければ、選別羽根62によりコンベアベルト44上から除去されることなく選別装置60を通過し、コンベヤ40の放出端から排出される。
【0050】
以上の本実施の形態によれば、廃棄物再資源化等の処理において、被処理物又は処理物の品質を検査し、不良判定されたものについては自動的に除去することができるので、不良品割合を低減させることで処理物の品質を向上させることができる。しかも、下部車体10上に必要機器を搭載してユニット化することによりトレーラ等による輸送性が確保されているので、被処理物の発生現場への搬入も容易である。さらに、移動式であるため現場内での設置位置の変更も容易であり、所望の位置に設置し易い。したがって、被処理物の発生現場において移動式処理機と組み合わせてシステムを構成することも容易であり、移動式処理機による処理物の品質向上に寄与し、移動式処理機とともに現場で処理システムを構成するので被処理物を現場外に持ち出して処理する場合に比して処理コストも大きく下げられる。また、移動式であるので、移動式処理機とともにシステムを構築する場合、システムのレイアウトの自由度も高い。
【0051】
また、本実施の形態では、移動式検査機100を移動式処理機の後段に配置して品質基準から外れる処理物(生産物)を除去し処理物の品質を安定化させる運用例を説明したが、移動式検査機100を移動式処理機の前段に配置した場合、例えば移動式処理機の処理に不適な品質の被処理物を移動式検査機100で除去することで、異物や処理困難な性状の処理物が移動式処理機に供給されることを未然に抑制することができるので、処理物の品質向上に加え、移動式処理機の故障を未然に抑制する効果も期待できる。
【0052】
図9は本発明の移動式検査機の第2の実施の形態を用いた処理システムの概略構成を表す側面図、図10は本発明の移動式検査機の第2の実施の形態に備えられた制御演算部550Aのブロック図、図11は本発明の移動式検査機の第2の実施の形態とともに処理システムを構成する移動式処理機の制御系の概略構成を表すブロック図である。図9及び図10における既出図面と同様の部分は、既出図面と同符号を付して説明を省略する。
【0053】
本実施の形態の移動式検査機100Aが第1の実施の形態の移動式検査機100と相違する点は、その検査部50Aの構成と、移動式処理機200との通信手段を設けたことにある。図9に示した処理システムは、移動式処理機200を移動式検査機100Aの前段に配置し、移動式処理機200による処理物(生産物)の品質を検査するものである。本実施の形態は、例えば移動式処理機200を自走式木材破砕機とした場合、破砕木材(木材チップ)が目的の粒度分布に納まっているかどうかを品質の良否判定基準とし、品質不良の破砕木材を除去したり、品質検査の結果を自走式木材破砕機にフィードバックして破砕木材の品質を木目細かく制御したりするのに好適である。
【0054】
図9及び図10に示すように、検査部50Aは、第1の実施の形態の移動式検査機100における検査部とほぼ同位置に設けられており、被検査物の画像を取得する検出部500Aと、検出部500Aで取得された画像データを基に被検査物の品質を判定する制御演算部550A(図10参照)と、移動式処理機200と通信するための通信アンテナ70とを備えている。
【0055】
検出部500Aは、図9に示すように、本体フレーム12上にコンベヤ40を跨ぐようにして固定された枠型の支持架台511と、コンベアベルト44上の被検査物を俯瞰撮影するカメラ512と、カメラ512の撮影箇所を照らす照明513とを備えている。これらカメラ512、照明513、検査コントローラ560A(後述)、通信アンテナ70は、支持架台511に支持されている。
【0056】
カメラ512は、例えばCCDカメラ等で構成することができ、コンベヤベルト44上の被検査物を設定の時間周期で連続的に撮影する。カメラ512により取得された被検査物の画像データは検査コントローラ560Aに出力される。また照明513の光量は、カメラ512の撮影箇所が適当な照度となるように調節される。
【0057】
制御演算部550Aは、図10に示すように、カメラ512からの画像データを基に被検査物の品質を判定する検査コントローラ560Aと、検査コントローラ560Aからの良否判定結果に従って選別装置60を制御する選別装置コントローラ580(第1の実施の形態と同様)とを備えている。
【0058】
検査コントローラ560Aは、検出部500Aのカメラ512からの画像データを記憶する記憶部562Aと、記憶部562Aに記憶された各画像データを画像処理する画像処理部563Aと、画像処理部563Aで抽出された画像データを基に被検査物の品質を判定する判定部564Aとを備えている。
【0059】
画像処理部563Aでは、カメラ512から入力される画像データに、これと同時にパルス検出器47から入力されたパルス信号が対応付けられ、各画像にその画像が取得されたコンベヤベルト44上の位置情報が付されて記憶部562に記憶される。カメラ512で取得される画像データは水平方向に一定の広さを持つ二次元的なデータであるので、この画像の撮影位置のコンベアベルト44上の位置情報と画像内の座標とを基に、画像内の各被検査物のコンベアベルト44上の位置を算出することができる。そして、画像処理部563Aでは、例えば記憶部562Aに記憶された各画像データが二値化処理され、俯瞰した被検査物の個々の粒子の画像データが抽出され、個々の粒子の画像データがその重心位置(或いは代表点)の座標情報とともに記憶部562Aに記憶される。
【0060】
判定部564Aでは、画像処理部563Aで処理された画像データを基に各粒子の大きさを算出し、算出した各粒子の大きさと座標情報を基に被検査物の粒度分布を算出する。また、その形状を基に鎹や釘等の異物も判別される。そして、算出した粒度分布をメインコントローラ590の記憶部592から読み出した設定値(設定粒度)と比較し、設定値よりも粒度が大きな破砕木材や異物が分布する箇所がある場合には、第1の実施の形態と同様、その箇所の情報を選別装置コントローラ580に通知し、選別装置コントローラ580によってコンベヤベルト44上から除去する。
【0061】
また、上記通信アンテナ70は、通信コントローラ71を介してメインコントローラ590に接続している。通信コントローラ71は、親機(ここでは、移動式処理機200や移動式処理機200に被破砕木材を投入する図示しない油圧ショベル等をさす)の通信部201(図11参照)との接続を確立する際、親機側の通信部201からのブロードキャスト(接続要求信号)に呼応してそれら通信部201と接続する。接続確立後は、親機側から通信部201を介して送信されてくる指令信号を受け、それをメインコントローラ590に出力する。また、制御演算部550Aで異物が判別された場合、通信コントローラ71は、警告信号を生成して通信アンテナ70を介して親機側に送信する。
【0062】
親機から通信コントローラ71に入力される指令信号は、情報送信を命令する信号(情報送信命令)と機械制御を命令する信号(機械制御命令)に大別される。情報送信命令は、移動式検査機100Aの現在の状態、例えばコンベヤ40の搬送速度、燃料残量、被検査物の品質検査結果(粒度分布、画像データ等)の親機側への送信を指令する信号である。機械制御命令は、移動式検査機100Aの構成機器の動作、例えばコンベヤ40の駆動、停止、又は搬送速度、検査部50Aの処理の実行又は停止等を指令する信号である。
【0063】
メインコントローラ590は、通信コントローラ71を介して情報送信命令が入力されると、記憶部562A,592から目的の情報を読み出して通信コントローラ71に出力し、通信コントローラ71は、通信アンテナ70を介してそれを親機に送信する。また、通信コントローラ71を介して機械制御命令が入力されると、メインコントローラ590は、入力された機械制御命令の指令値に準じて制御部591により該当機器(搬送用コントロールバルブ48等)への指令信号を生成し出力する。親機側からの機械制御命令により、移動式検査機100Aの選別装置60を駆動させることもできる。
【0064】
親機(移動式処理機)側では、そのコントローラ202により、受信した移動式検査機100Aからの粒度分布情報を目標粒度と比較し、処理装置や処理装置への被破砕木材の供給装置等を含む各作動装置の駆動部203に指令信号を出力し、破砕物の粒度と移動式検査機100Aからの粒度分布情報との偏差が小さくなるように各作動装置の動作速度を自動的かつ動的に制御する。またコントローラ202は、操作者の所定の操作により操作盤205から出力される操作信号を入力した場合、移動式検査機100Aからの入力情報を表示装置204に表示させる。
【0065】
本実施の形態においても、第1の実施の形態と同様の効果を得ることができる。また、処理システムを構成する他の機械と情報通信し、検査結果を他の機械にフィードバックしたり他の機械と動作を連携したりすることができるので、生産物の品質や作業効率のより一層の向上が期待できる。また、操作者は、表示装置204に品質検査の結果を表示させることによって、親機側で被処理物の処理状態を監視したり、移動式処理機の運転状態を手動で調節したりすることもできる。
【0066】
図12は本発明の移動式検査機の第3の実施の形態を用いた処理システムの概略構成を表す側面図である。図12における既出図面と同様の部分は、既出図面と同符号を付して説明を省略する。
【0067】
本実施の形態の移動式検査機100Bが第2の実施の形態の移動式検査機100Aと相違する点は、被検査物の含水率を計測する含水率計測器手段を追加設置したこと、及び外部からの供給動力を受け各機器に分配する動力分配部80を備えたことにある。図12に示した処理システムは、移動式処理機300の前段に移動式検査機100Bを配置して移動式処理機300に供給される被処理物の品質(性状)を処理前に検査し、その結果を基に移動式処理機300における被処理物の処理条件を制御する構成となっている。本実施の形態は、例えば移動式処理機300を自走式土質改良機とした場合、処理対象土砂の含水率に応じて土砂への土質改良材の添加量を制御することで改良土の品質を安定化するのに好適である。移動式処理機300では、移動式検査機100Bのコンベヤ40から放出された検査済みの被処理物(土砂)を受け入れ、これに土質改良材供給装置(図示せず)により土質改良材を添加し、混合装置(図示せず)によって被処理物と土質改良材とを混合処理し改良土として排出する。
【0068】
上記動力分配部80は、動力装置20における下部車体10の他方側(図12中左側)に隣接するように本体フレーム12上に設けられており、動力伝導ケーブル90を介して移動式処理機300の図示しない動力出力部に接続している。動力分配部80は、動力伝導ケーブル90を介して移動式処理機300から供給される電力を入力し、移動式検査機100Bに搭載された各電動装置に供給する。このとき、動力分配部80により、移動式処理機300からの供給電力が動力装置20からの電力と交互に各電動装置に供給される、或いはそれぞれ割り振られた供給先に移動式処理機300からの供給電力と動力装置20からの電力が分配されるようにしても良い。
【0069】
また、本実施の形態における検査部50Bは、検出部500Aに加え、被検査物の含水率を検出する検出部500Bを備えている。検出部500Bは、図12に示すように、本体フレーム12上にコンベヤ40を跨ぐようにして固定された枠型の支持架台567と、コンベアベルト44上の被検査物に電磁波(例えば近赤外線)を照射する電磁波照射器565と、電磁波照射器565から照射された電磁波の反射波(反射成分)を検出する電磁波検出器566とを備えている。電磁波照射器565、電磁波検出器566は、支持架台567により支持されている。また、検出部500B自体はホッパ30と選別装置60の間に位置し、検出部500Aの上流側に設置されている。但し、検出部500A,500Bの位置関係は必ずしも限定されず、検出部500Aの下流側に検出部500Bを設けても良いし、共用の支持架台にカメラ512、照明513、電磁波照射器565、電磁波検出器566を設けて検出部500A,500Bの配置を同じ支持架台に集約しても良い。
【0070】
電磁波照射器565により照射された電磁波は、コンベヤベルト44上の被検査物で反射し、その反射が電磁波検出器566により検出され、制御演算部(図示せず)に出力される。図示しない制御演算部は、図10に示した制御演算部550Aに、電磁波検出器566から入力した電磁波(反射波)の減衰を基にコンベアベルト44上の被検査物の含水率を算出する演算部を追加した構成で、演算部により算出された含水率は、通信コントローラ71、通信アンテナ70を介して移動式処理機300の通信部(図示せず)に送信される。この含水率の送信は、前出の情報送信命令のように移動式処理機300側からの要求に呼応する方式でも良いし、移動式検査機100B側から随時又は一定の時間間隔で送信する方式でも良い。移動式処理機300側では、予め一定品質を確保するために与えられた土砂の含水率に対する土質改良材の添加量の関係の下、移動式処理機300側のコントローラにより、移動式検査機100Bから受け取った被処理物の含水率の情報を基に土質改良材供給装置の駆動速度が制御され、被処理物に対する土質改良材の添加量が調整される。
【0071】
本実施の形態によれば、第2の実施の形態と同様の効果に加え、処理に先駆けて被検査物の含水率の情報を取得することにより、移動式処理機300側の被処理物の処理条件を好適に制御することができる。また、移動式検査機100Bによって移動式処理機300に供給される被処理物から異物を除去することができるので、移動式処理機300の処理装置等における異物の噛み込み等のトラブルを未然に抑制することができる。
【0072】
加えて、別置きの装置、すなわち本実施の形態では移動式処理機300から動力伝導ケーブル90を介して供給された動力を自己の駆動装置に供給することができるので、エネルギー残量に余裕のないとき等には外部からの供給動力で稼動することができる。他の移動式処理機とともに処理システムを構成する本発明の移動式検査機では、ともに処理システムを構成する移動式処理機が近くに配置されるので、このように動力の供給を受けることができる構成とすることで各機のエネルギー効率に応じて柔軟にエネルギーを分配することができる。
【0073】
図13は本発明の移動式検査機の第4の実施の形態の概略構成を表す側面図である。図13における既出図面と同様の部分は、既出図面と同符号を付して説明を省略する。
【0074】
本実施の形態の移動式検査機100Cが第1の実施の形態の移動式検査機100と相違する点は、検出部50の設置状態にある。本実施の形態において、検出部50は、開口部504(図2及び図3参照)を上下に向けた姿勢でホッパ30の下部に位置するように支持部材31によって本体フレーム12に支持されている。すなわち、ホッパ30から導出されコンベヤ40上に落下中の被検査物を開口部504に通し、落下中の被検査物の断面画像を取得する。被検査物の断面画像とコンベヤ40上の位置情報との対応付けは、例えば断面画像取得時の検出部50(例えば開口部504の中心)の下方位置を当該断面画像の付属位置情報とする。
【0075】
このような構成としても同様の効果を得ることができる。また、第2及び第3の実施の形態においても、それぞれ検査物500A,500Bを、ホッパ30からコンベヤ40上に落下する被検査物の検査データを検出するように設置しても良い。
【0076】
図14は本発明の移動式検査機の第5の実施の形態に備えられた選別装置の要部を抽出して表した概略図である。図14はコンベヤ40による被検査物の搬送方向から見た構成を図示している。本図における既出図面と同様の部分は、既出図面と同符号を付して説明を省略する。
【0077】
本実施の形態の移動式検査機が第1の実施の形態の移動式検査機100と相違する点は、選別装置の構成にある。本実施の形態における選別装置は、図14に示したように選別羽根62は基端部分に支軸64よりも上方に延びる操作部62aを有しており、この操作部62aにほぼ水平な姿勢のシリンダ68(油圧でも電動でも可)のロッド先端部を回動自在に連結することにより、シリンダ68の伸縮動作に伴って選別羽根62が往復揺動する構成である。選別羽根62の揺動範囲はシリンダ68の伸縮量による。シリンダ68は、第1の実施の形態における駆動モータ65(図5及び図6参照)に相当する。このような装置構成としても、同様の効果を得ることができる。
【0078】
図15は本発明の移動式検査機の第6の実施の形態に備えられた選別装置の要部を抽出して表した概略図である。図15はコンベヤ40による被検査物の搬送方向から見た構成を図示している。本図における既出図面と同様の部分は、既出図面と同符号を付して説明を省略する。
【0079】
本実施の形態の移動式検査機が第1の実施の形態の移動式検査機100と相違する点は、選別装置の構成にある。本実施の形態における選別装置は、図15に示したようにコンベヤ40の幅方向の両側に位置する筐体61aの両側面の内壁部が下方に向かって縮径するシュート状に形成されている。この筐体61aの下部開口の下方には、コンベヤ40による被検査物の搬送方向(紙面直交方向)にとった寸法が筐体61aの下部開口よりも幅広のコンベヤベルトを有するサイドコンベヤ48が、コンベヤ40と直交する方向に延在している。
【0080】
つまり、第1の実施の形態では選別羽根62で選別された被検査物がシュート63で機外に外出される構成であったのに対し、本実施の形態では選別された被検査物がサイドコンベヤ48により良品と分別されて排出される構成である。サイドコンベヤ48は上り傾斜になっており排出高さが確保されている。またサイドコンベヤ48の実質的な構成はコンベヤ40とほぼ同様である。
【0081】
さらに、本実施の形態の場合、筐体61aの両側壁がコンベヤ40からサイドコンベヤ48に対して選別された被検査物を導くガイド手段として機能するので、選別羽根62の往復動作のどちらの動作で払い除けられた被検査物も安定にサイドコンベヤ48上に導かれる。このような装置構成としても、同様の効果を得ることができる。
【0082】
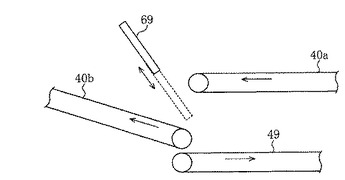
図16は本発明の移動式検査機の第7の実施の形態に備えられた選別装置の要部を抽出して表した概略図である。図16は側面側から見た構成を示している。本図における既出図面と同様の部分は、既出図面と同符号を付して説明を省略する。
【0083】
本実施の形態の移動式検査機が第1の実施の形態の移動式検査機100と相違する点は以下に説明する3点である。
【0084】
第1の相違点は、ホッパ30で受け入れた被検査物を搬送し良品を搬出するコンベヤが、ホッパ30と検出部50をカバーする上流側コンベヤ40a、及び選別装置により選別された良品を排出する下流側コンベヤ40bに分割されていることにある。これらコンベヤ40a,40bは、ともに本体フレーム12や動力装置20により適宜支持されている。上流側コンベヤ40aは、ホッパ30の下方から検出部50を通過する位置まで水平に延在している。下流側コンベヤ40bは、上流側コンベヤ40aの放出端の下方位置から上流側コンベヤ40aによる被検査物の搬送方向下流側に向かって上り傾斜に延在している。下流側コンベヤ40bの放出端の高さは第1の実施の形態におけるコンベヤ40と同程度である。
【0085】
第2の相違点は、選別装置により選別された不良品を良品と分別して排出するコンベヤ49を追加したことにある。コンベヤ49は、本体フレーム12により吊り下げ支持されている。コンベヤ49は、上流側コンベヤ40aの放出端の下方位置(本例では下流側コンベヤ40bの上流端よりも下方位置)から上流側コンベヤ40aによる被検査物の搬送方向上流側にほぼ水平に延在している。但し、コンベヤ49の延在方向は、下流側コンベヤ40bと互いの搬送する被検査物が分別して搬出される限りにおいては限定されない。機体側方に延在させる場合は上り傾斜としても良い。
【0086】
第3の相違点は、選別装置の構成にある。本実施の形態における選別装置は、図16に示したように選別板69が上流側コンベヤ40aと下流側コンベヤ40bとの間に斜め上方から抜き差し可能に構成されている。選別板69は、その先端部が上流側コンベヤ40aの放出端の前方側(図16中の左側)上方位置から同じく上流側コンベヤ40aの放出端の後方側(図16中の右側)下方位置まで移動するようにその面方向にスライドし、上限位置(実線参照)にあるときは上流側コンベヤ40aから放出される被検査物の流れから退避し、下限位置(点線参照)にあるときは上流側コンベヤ40aから放出される被検査物を遮るようになっている。詳細には図示していないが、選別板69は、筐体61に支持されたシリンダ等の駆動装置により図示した方向にスライドするようになっている。この駆動装置は、良品と判定された被検査物が上流側コンベヤ40aから放出される際には実線の位置に、不良品と判定された被検査物が上流側コンベヤ40aから放出される際には点線の位置にそれぞれ選別板69が移動するように制御される。
【0087】
すなわち、本実施の形態では、良品と判定された被検査物は上流側コンベヤ40aから放出されて下流側コンベヤ40bに移行して下流側コンベヤ40bから放出され、不良品と判定された被検査物は選別板69に遮られコンベヤ49上に導かれる。このような装置構成としても、同様の効果を得ることができる。
【0088】
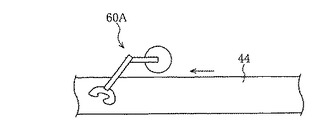
図17は本発明の移動式検査機の第8の実施の形態に備えられた選別装置の要部を抽出して表した概略図である。図17は上方向から見た構成を図示している。本図における既出図面と同様の部分は、既出図面と同符号を付して説明を省略する。
【0089】
本実施の形態の移動式検査機が第1の実施の形態の移動式検査機100と相違する点は、選別装置の構成にある。本実施の形態における選別装置60Aは、所定の大きさの粒子を把持選別することができる多関節型のロボットアームで構成されている。この選別装置60Aは、検出部500の下流側部分にてコンベアベルト44の傍らに位置するように本体フレーム12上に設置され、不良と判定された被検査物の粒子を把持してコンベアベルト44上から取り除き、機外例えば機体側方の定位置に排出する。X線断面撮像装置を検出部に用いた場合、第1の実施の形態で説明したように粒子単位で品質の良否及びその位置が精度良く特定できるので、本例のようにロボットアームにより目標の品質を満足しない不良品を粒子単位で選別除去することができる。これにより、不良品とともに除去される良品の量を効果的に抑制することができる。
【0090】
なお、以上において、コンベヤ40上の被検査物の搬送量(例えばコンベヤベルト44上の被検査物の山の断面積)を調整する手段について得に説明しなかったが、コンベヤ40を一定速度に保ったまま被検査物の搬送量を調整する手段を設けることもできる。例えばホッパ30の下部をコンベヤベルト44に摺接するか近接する程度に近付け、搬送方向下流側のホッパ30の前壁部分にコンベヤベルト44に対向する被検査物出口を設ける構成とした場合、被検査物出口の開口面積(開口高さ)を調整するゲートをホッパ30に設けることで、コンベヤベルト44上の被検査物の断面積を制御して搬送量を調整することができる。開口面積を一定とすることで、定量供給が実現できる。
【0091】
また、各実施の形態の移動式検査機や、これとともに処理システムを構成する移動式処理機は、自力走行可能な下部車体(走行装置)を備えた自動式の機械とすることができるが、例えば非駆動の単なる台車状の下部車体を有し、牽引走行可能なタイプのものとしても良い。また、各実施の形態では、上流側に対して下流側が上り傾斜に屈曲したコンベヤ40を例に挙げて説明したが、ホッパ30の下方位置から放出端に向かって直線的に上り方向に傾斜したコンベヤとすることもできる。
【0092】
また、各実施の形態において移動式検査機とともに処理システムを構成する移動式処理機として、コンクリートガラ等の岩石材料を破砕する移動式破砕機(ジョークラッシャ等)、被破砕木材を破砕して木材チップを生産する移動式木材破砕機、土砂材料に土質改良材を混合して改良土を生成する移動式土質改良機等を例に挙げたが、これらに限られず、家電製品やゴムタイヤ、畳等の各種被破砕物を剪断破砕する移動式シュレッダの他、移動式インパクトクラッシャや移動式ロールクラッシャ、或いは補器的に使用される移動式スクリーン、移動式コンベヤ等とも処理システムを構成可能であり、それらの受け入れる被処理物又は排出する処理物を対象として、品質判定のパラメータとする項目の特徴量を検査して良否判定することができる。
【図面の簡単な説明】
【0093】
【図1】本発明の移動式検査機の第1の実施の形態の概略構成を表す側面図である。
【図2】本発明の移動式検査機の第1の実施の形態に備えられた検査部の側面図である。
【図3】図2中のIII−III断面による断面図である。
【図4】本発明の移動式検査機の第1の実施の形態に備えられた制御演算部の構成を表すブロック図である。
【図5】本発明の移動式検査機の第1の実施の形態に備えられた選別装置の側面図である。
【図6】図5のVI−VI断面による断面図である。
【図7】本発明の移動式検査機の第1の実施の形態に備えられた画像処理部による画像処理アルゴリズムの一例を表すフローチャートである。
【図8】本発明の移動式検査機の第1の実施の形態に備えられた判定部による良否判定アルゴリズムの一例を表すフローチャートである。
【図9】本発明の移動式検査機の第2の実施の形態を用いた処理システムの概略構成を表す側面図である。
【図10】本発明の移動式検査機の第2の実施の形態に備えられた制御演算部のブロック図である。
【図11】本発明の移動式検査機の第2の実施の形態とともに処理システムを構成する移動式処理機の制御系の概略構成を表すブロック図である。
【図12】本発明の移動式検査機の第3の実施の形態を用いた処理システムの概略構成を表す側面図である。
【図13】本発明の移動式検査機の第4の実施の形態の概略構成を表す側面図である。
【図14】本発明の移動式検査機の第5の実施の形態に備えられた選別装置の要部を抽出して表した概略図である。
【図15】本発明の移動式検査機の第6の実施の形態に備えられた選別装置の要部を抽出して表した概略図である。
【図16】本発明の移動式検査機の第7の実施の形態に備えられた選別装置の要部を抽出して表した概略図である。
【図17】本発明の移動式検査機の第8の実施の形態に備えられた選別装置の要部を抽出して表した概略図である。
【符号の説明】
【0094】
10 走行体
11 走行装置
20 動力装置
30 ホッパ
40 コンベヤ
40a 上流側コンベヤ
40b 下流側コンベヤ
48 サイドコンベヤ
49 コンベヤ
50 検査部
50A,B 検査部
60,60A 選別装置
61 筐体
62 選別羽根
63 シュート
64 支軸
65 駆動モータ
66,67 リミットスイッチ
69 選別板
70 通信アンテナ
71 通信コントローラ
80 動力分配部
90 動力伝導ケーブル
100,100A〜C 移動式検査機
200 移動式処理機
201 通信部
202 コントローラ
203 駆動部
300 移動式処理機
500,500A,B 検出部
501 筐体
502 X線照射部
503 X線検出部
512 カメラ
513 照明
550,550A 制御演算部
560,560A 検査コントローラ
561 CT合成部
562,562A 記憶部
563,563A 画像処理部
564,564A 判定部
565 電磁波照射器
566 電磁波検出器
580 選別装置コントローラ
590 メインコントローラ
591 制御部
592 記憶部
595 操作部
P 粒子
C 重心座標
【特許請求の範囲】
【請求項1】
被処理物の発生現場にて移動式処理機に供給される被処理物又は前記移動式処理機で処理された処理物を被検査物として検査する移動式検査機であって、
下部車体と、
前記下部車体上に設けた動力装置と、
前記下部車体上の一方側に設けた被検査物の受け入れ部と、
前記受け入れ部の下方位置から前記下部車体の他方側に向かって延在したコンベヤと、
前記受け入れ部を介して受け入れた被検査物の検査データを検出する検出部と、
前記コンベヤ上の前記検出部よりも下流側の位置に設けられ、被検査物を前記コンベヤ上から除去し選別する選別装置と、
被検査物の良否判定の基準とする特徴量に対し目標品質に応じて予め設定した設定値を記憶した記憶部と、
前記検出部で検出された検査データを基に算出された被検査物の前記特徴量を前記記憶部から読み出した設定値と比較し、前記コンベヤ上の被検査物の品質の良否を判定する判定部と、
前記判定部から入力された品質不良の被検査物の情報を基に前記選別装置を制御し、前記コンベヤにより搬送される品質不良の被検査物を良品と分別する選別装置コントローラと
を備えたことを特徴とする移動式検査機。
【請求項2】
請求項1の移動式検査機において、
被検査物の断面画像を前記検査データとして取得するX線断面撮像装置を有する前記検出部と、
前記検出部で取得された複数の断面画像から被検査物の各粒子の各断面画像を抽出する画像処理部と、
前記画像処理部により抽出された個々の粒子の各断面画像を基に被検査物の各粒子の質量を前記特徴量として算出し、算出した特徴量を前記設定値と比較して被検査物の品質の良否を判定する前記判定部と
を備えたことを特徴とする移動式検査機。
【請求項3】
請求項1の移動式検査機において、
前記コンベヤ上の被検査物の俯瞰撮影画像を前記検査データとして取得するカメラを有する前記検出部と、
前記検出部で取得された画像を基に前記特徴量として算出された被検査物の粒度分布を前記設定値と比較して被検査物の品質の良否を判定する前記判定部と
を備えたことを特徴とする移動式検査機。
【請求項4】
請求項1の移動式検査機において、
前記コンベヤ上の被検査物に向けて照射した電磁波の反射成分を前記検査データとして取得する電磁波検出器を有する前記検出部と、
前記検出部で取得された電磁波を基に前記特徴量として算出された被検査物の含水率を前記設定値と比較して被検査物の品質の良否を判定する前記判定部と
を備えたことを特徴とする移動式検査機。
【請求項5】
請求項1の移動式検査機において、前記移動式処理機に備えられた通信部との間で検査結果及び制御信号を授受する通信部を備えたことを特徴とする移動式検査機。
【請求項1】
被処理物の発生現場にて移動式処理機に供給される被処理物又は前記移動式処理機で処理された処理物を被検査物として検査する移動式検査機であって、
下部車体と、
前記下部車体上に設けた動力装置と、
前記下部車体上の一方側に設けた被検査物の受け入れ部と、
前記受け入れ部の下方位置から前記下部車体の他方側に向かって延在したコンベヤと、
前記受け入れ部を介して受け入れた被検査物の検査データを検出する検出部と、
前記コンベヤ上の前記検出部よりも下流側の位置に設けられ、被検査物を前記コンベヤ上から除去し選別する選別装置と、
被検査物の良否判定の基準とする特徴量に対し目標品質に応じて予め設定した設定値を記憶した記憶部と、
前記検出部で検出された検査データを基に算出された被検査物の前記特徴量を前記記憶部から読み出した設定値と比較し、前記コンベヤ上の被検査物の品質の良否を判定する判定部と、
前記判定部から入力された品質不良の被検査物の情報を基に前記選別装置を制御し、前記コンベヤにより搬送される品質不良の被検査物を良品と分別する選別装置コントローラと
を備えたことを特徴とする移動式検査機。
【請求項2】
請求項1の移動式検査機において、
被検査物の断面画像を前記検査データとして取得するX線断面撮像装置を有する前記検出部と、
前記検出部で取得された複数の断面画像から被検査物の各粒子の各断面画像を抽出する画像処理部と、
前記画像処理部により抽出された個々の粒子の各断面画像を基に被検査物の各粒子の質量を前記特徴量として算出し、算出した特徴量を前記設定値と比較して被検査物の品質の良否を判定する前記判定部と
を備えたことを特徴とする移動式検査機。
【請求項3】
請求項1の移動式検査機において、
前記コンベヤ上の被検査物の俯瞰撮影画像を前記検査データとして取得するカメラを有する前記検出部と、
前記検出部で取得された画像を基に前記特徴量として算出された被検査物の粒度分布を前記設定値と比較して被検査物の品質の良否を判定する前記判定部と
を備えたことを特徴とする移動式検査機。
【請求項4】
請求項1の移動式検査機において、
前記コンベヤ上の被検査物に向けて照射した電磁波の反射成分を前記検査データとして取得する電磁波検出器を有する前記検出部と、
前記検出部で取得された電磁波を基に前記特徴量として算出された被検査物の含水率を前記設定値と比較して被検査物の品質の良否を判定する前記判定部と
を備えたことを特徴とする移動式検査機。
【請求項5】
請求項1の移動式検査機において、前記移動式処理機に備えられた通信部との間で検査結果及び制御信号を授受する通信部を備えたことを特徴とする移動式検査機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2009−172504(P2009−172504A)
【公開日】平成21年8月6日(2009.8.6)
【国際特許分類】
【出願番号】特願2008−12986(P2008−12986)
【出願日】平成20年1月23日(2008.1.23)
【出願人】(000005522)日立建機株式会社 (2,611)
【Fターム(参考)】
【公開日】平成21年8月6日(2009.8.6)
【国際特許分類】
【出願日】平成20年1月23日(2008.1.23)
【出願人】(000005522)日立建機株式会社 (2,611)
【Fターム(参考)】
[ Back to top ]