
自走式管内検査カメラ装置
【課題】管路内に段差等の障害物が存在しても、その障害物を容易に乗り越えて走行でき、管路内の検査が迅速に行なえるとともに、構成が簡単で小型化が図れる自走式管内検査カメラ装置を提供する。
【解決手段】検査対象管内を走行可能な走行ユニット11と、走行ユニット11に搭載され検査対象管内を観察するカメラユニット35と、走行ユニット11の左右両側に、かつ前後方向に離間して左右対称的に設けられ、スイング軸18を中心として上下方向に揺動自在な少なくとも2対のスイングユニット17a,17bと、各スイングユニット17a,17bの前後方向の両端部に設けられた車輪21a,21bと、走行ユニット11に搭載された駆動モータ23と、駆動モータ23の回転力をスイング軸18を介して各車輪21a,21bに伝達させて走行ユニット11を走行させるとともにスイングユニット17a,17bをスイング軸18を中心として揺動させる回転トルクを作用させる回転力伝動機構34とを具備したことを特徴とする。
【解決手段】検査対象管内を走行可能な走行ユニット11と、走行ユニット11に搭載され検査対象管内を観察するカメラユニット35と、走行ユニット11の左右両側に、かつ前後方向に離間して左右対称的に設けられ、スイング軸18を中心として上下方向に揺動自在な少なくとも2対のスイングユニット17a,17bと、各スイングユニット17a,17bの前後方向の両端部に設けられた車輪21a,21bと、走行ユニット11に搭載された駆動モータ23と、駆動モータ23の回転力をスイング軸18を介して各車輪21a,21bに伝達させて走行ユニット11を走行させるとともにスイングユニット17a,17bをスイング軸18を中心として揺動させる回転トルクを作用させる回転力伝動機構34とを具備したことを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば水道管、下水管、ガス管などを検査する際に適用して好適な自走式管内検査カメラ装置に関する。
【背景技術】
【0002】
工場、化学プラントあるいは山間地等の不整地において、巡回検査や非常時作業等の目的のために移動を可能にした能動適応型走行車が知られている(例えば、特許文献1参照。)。
この走行車は、車体の左右両側部に2対のクローラ(キャタピラー)が、その長さ方向の中間部を支点として揺動可能に設けられている。クローラの駆動系は、中央出力軸と偏心出力軸を備えるとともに、両出力軸を回転させるモータが独立して設けられている。
【0003】
そして、両モータの回転速度を制御することにより、クローラをその長さ方向に推進させる場合とクローラをその中間部を支点として揺動させる場合の2つの自由度を実現させ、不整地であっても走行を可能にしたものである。
また、急激に衝撃を受けることなく階段を昇降できる自走車が知られている(例えば、特許文献2参照。)。
この自走車は、車体の左右両側部に前後方向に離間して2対のクローラと複数個の車輪とを備えている。そして、水平面を走行する際には車輪で走行し、階段の傾斜面を昇降する際にはクローラを階段の傾斜面に沿うように揺動させて昇降できるようにしたものである。
【特許文献1】特公平2−03754号公報
【特許文献2】特開平7−40865号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
前記特許文献1のものは、車体の左右両側部に設けた2対のクローラの駆動系が中央出力軸と偏心出力軸の両出力軸を回転させるモータが独立して設けられ、両モータの回転速度を制御して水平面の推進と不整地の走行を可能にしたものである。したがって、複数個のモータを必要と構成が複雑となるとともに、モータの駆動制御が煩雑となっている。
特許文献2のものは、水平面を走行する際には車輪で走行し、階段の傾斜面を昇降する際にはクローラを階段の傾斜面に沿うように揺動させて昇降できるようにしたものであり、車体に対してクローラを揺動及び昇降させる構成が複雑である。
【0005】
したがって、特許文献1,2のものは、装置が大型化し、カメラユニット等を搭載し、例えば水道管、下水管、ガス管などの狭い管路内を検査する管内検査カメラ装置には適さない構成である。
本発明は、前述のような事情に着目してなされたもので、その目的とするところは、管路内に段差等の障害物が存在しても、その障害物を容易に乗り越えて走行でき、管路内の検査が迅速に行なえるとともに、構成が簡単で小型化が図れる自走式管内検査カメラ装置を提供することにある。
【課題を解決するための手段】
【0006】
前記目的を達成するために、本発明の自走式管内検査カメラ装置は、検査対象管内を走行可能な走行ユニットと、前記走行ユニットに搭載され前記検査対象管内を観察するカメラユニットと、前記走行ユニットの左右両側に、かつ前後方向に離間して左右対称的に設けられ、スイング軸を中心として上下方向に揺動自在な少なくとも2対のスイングユニットと、前記各スイングユニットの前後方向の両端部に設けられた車輪と、前記走行ユニットに搭載された駆動モータと、前記駆動モータの回転力を前記スイング軸を介して前記各車輪に伝達させて前記走行ユニットを走行させるとともに前記スイングユニットに前記スイング軸を中心として回転トルクを作用させる回転力伝動機構とを具備したことを特徴とする。
【0007】
前記走行ユニットは、好ましくは、前記各車輪が前記回転力伝動機構を介して駆動される総輪駆動方式であることを特徴とする。
【0008】
前記回転力伝動機構は、好ましくは、前記走行ユニットの左右両側に対称的に配置された前記スイング軸を含む歯車群であることを特徴とする。
【0009】
前記駆動モータは、好ましくは、前記走行ユニットの中央部に1台搭載され、該走行ユニットに左右対称的に配置された前記スイングユニット及び車輪に回転トルクを伝動させる動力伝達系を有していることを特徴とする。
【0010】
前記スイングユニットは、好ましくは、前記スイング軸と一体に回転する第1の歯車、前記スイング軸を中心として上下方向に揺動自在であり、両端部に前記車輪を設けたスイングレバー及びこのスイングレバーの両端部に設けられ前記第1の歯車と噛合して前記車輪に回転力を伝達させる第2の歯車とからなり、走行中に、前記車輪に回転力を拘束する外力が作用すると、前記スイング軸を中心として前記スイングレバーを揺動させる回転トルクが作用することを特徴とする。
【0011】
前記スイングユニットは、さらに好ましくは、前記スイング軸と一体に回転する第1の歯車、前記スイング軸を中心として上下方向に揺動自在であり、両端部に前記車輪を設けたスイングレバー及びこのスイングレバーの両端部に設けられ前記第1の歯車と噛合して前記車輪に回転力を伝達させる第2の歯車とからなり、走行中に、前記車輪が障害物に接触して回転が停止すると、前記スイング軸を中心として前記スイングレバーを前記車輪の回転方向と逆方向に揺動させる回転トルクが作用し、前記車輪は前記障害物を乗り越えることを特徴とする。
【発明の効果】
【0012】
本発明によれば、走行中に、車輪が障害物に接触して回転が停止すると、スイング軸を中心としてスイングユニットが車輪の回転方向と逆方向に揺動し、回転トルクが作用して障害物を乗り上げることができる。したがって、管路内に段差等の障害物が存在しても、その障害物を容易に乗り越えて走行でき、管路内の検査が迅速に行なえるとともに、構成が簡単で小型化が図れるという効果がある。
【発明を実施するための最良の形態】
【0013】
以下、図面を参照して本発明の実施形態を説明する。
【実施例】
【0014】
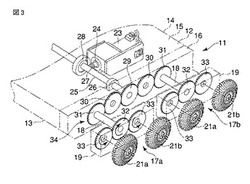
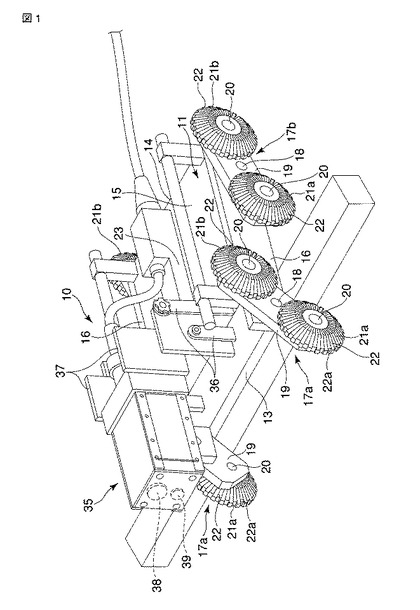
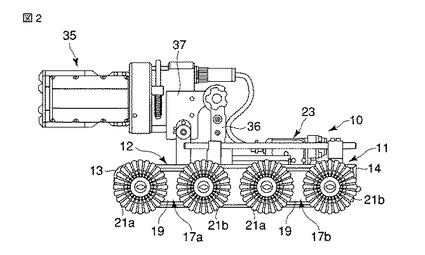
図1は本発明の実施形態に係る自走式管内検査カメラ装置の斜視図、図2は同じく側面図である。図1及び図2に基づいて自走式管内検査カメラ装置10は、水道管、下水管、ガス管等の検査対象管内を走行して管路内を検査する装置であり、外部から遠隔操作により走行できるようになっている。
走行ユニット11を構成する車体12は、前部13及び後部14を有する矩形平板状のメインフレーム15の左右両側部にはサイドフレーム16が設けられている。サイドフレーム16には車体12の前後方向に離間して2対のスイングユニット17a,17bが左右対称的に設けられている。
【0015】
これらスイングユニット17a,17bにはサイドフレーム16に回転自在に軸支されたスイング軸18を中心として上下方向に揺動自在なスイングレバー19が設けられている。このスイングレバー19の長手方向の両端部には回転軸20が軸支され、この回転軸20には車輪21(前車輪21a,後車輪21b)が嵌着されている。したがって、各スイングユニット17a,17bには前車輪21a,後車輪21bが設けられており、これら前車輪21a,後車輪21bは同一径のゴムタイヤ22を有し、ゴムタイヤ22には管路の内壁面とのスリップを防止するために外周部及び外側部には凹凸部22aが形成されている。
【0016】
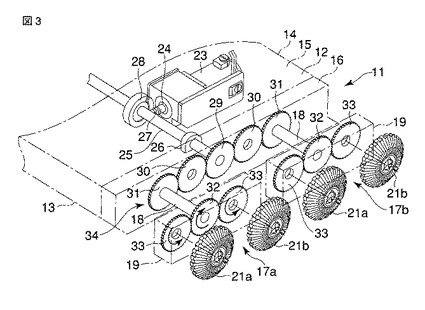
図3に示すよう、前記メインフレーム15の中央部における上面には正逆回転可能な駆動モータ23がその回転軸24を車体12の前部13に向けて搭載されている。さらに、メインフレーム15には回転軸24と直交するように車体12の横方向に駆動軸25が架設され、この駆動軸25は軸受台26によって回転自在に支持されている。回転軸24にはウォーム27が嵌着され、駆動軸25の中間部にはウォーム27と噛合するウォームホィール28が嵌着されている。そして、回転軸24の回転力がウォーム27とウォームホィール28を介して駆動軸25に伝動するようになっている。
駆動軸25の両端部はサイドフレーム16の内部まで延長しており、この駆動軸25の端部には駆動歯車29が嵌着されている。サイドフレーム16には駆動歯車29を挟んで車体12の前後に中間歯車30を介して従動歯車31が噛合した状態で設けられている。そして、これら従動歯車31は前記スイング軸18の一端部に嵌着されている。そして、駆動軸25の回転力が駆動歯車29、中間歯車30及び従動歯車31を介してスイング軸18に伝動するようになっている。
スイング軸18の他端部、つまりスイングユニット17a,17bの内部における中間部には第1の平歯車32が嵌着され、この第1の平歯車32は前車輪21a,後車輪21bを支持する回転軸20の嵌着された第2の平歯車33と噛合している。そして、スイング軸18の回転力が第1の平歯車32を介して第2の平歯車33に伝動して全ての前車輪21a,後車輪21bが駆動する総輪駆動方式になっており、さらに、スイング軸18を中心としてスイングレバー19を揺動させるように回転トルクを作用させる回転力伝動機構34を構成している。
【0017】
さらに、図1及び図2に示すように、前記メインフレーム15の上面における前部13には管路内を観察して検査するカメラユニット35が搭載されている。すなわち、メインフレーム15の上面には支持部材36が立設され、この支持部材36にはカメラ支持部材37が固定されている。カメラ支持部材37には管路内の前方及び側部を撮影するカメラヘッド38が設けられている。カメラユニット35には光学系(カメラレンズ)及びカラーCCDを有する撮像部が直視方向と側視方向との間で視方向切替可能に設けられ、さらにカメラユニット35には直視用集光照明部、直斜視用拡散照明部及び側視用拡散照明部により構成される照明ユニット39が設けられている。
【0018】
次に、前述のように構成された自走式管内検査カメラ装置の作用について説明する。
自走式管内検査カメラ装置10を検査対象物としての管路内にセットし、遠隔操作によって自走式管内検査カメラ装置10を前進させるべく駆動モータ23を駆動させると、回転軸24が回転する。回転軸24の回転力はウォーム27とウォームホィール28を介して駆動軸25に伝動し、駆動歯車29は図3に示す矢印方向に回転する。
駆動歯車29の回転は中間歯車30を介して従動歯車31に伝動し、従動歯車31と一体にスイング軸18が図3に示す矢印方向に回転する。スイング軸18の回転力は第1の平歯車32を介して前後の第2の平歯車33に伝動し、スイングユニット17a,17bの回転軸20を介して前車輪21a,後車輪21bが駆動する。したがって、自走式管内検査カメラ装置10は検査対象物としての管路内を総輪駆動で前進する。
このとき、照明ユニット39によって管路内を照明し、カメラユニット35によって管路内の前方及び側部を撮影することができ、管路の内壁の亀裂、腐食あるいは異物の付着等を観察することができる。
【0019】
ところで、管路内は平滑であるとは限らず、配管の接続管、溶接部あるいは配線等によって段差ができていたり、障害物が存在している場合がある。つまり、障害物によって自走式管内検査カメラ装置10の通常の走行が妨げられる場合がある。
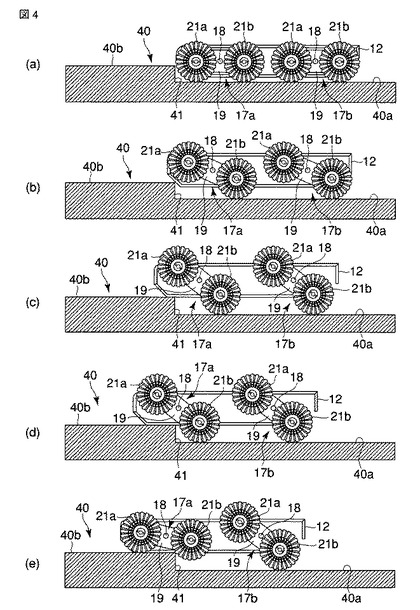
図4は管路内40の途中に段差からなる障害物41が存在する場合を示し、障害物41を挟んで手前側が低路面40aで、先側が高路面40bを示す。自走式管内検査カメラ装置10が管路内40を走行中に、図4(a)に示すように、車体12の前部側のスイングユニット17aで、しかも前車輪21aが障害物41に当接すると、前車輪21a,後車輪21bの前進しようとする矢印方向の回転が妨げられる。
このとき、駆動歯車29の回転は中間歯車30を介して従動歯車31に伝動し、スイング軸18には回転力が加わっているため、スイング軸18を中心としてスイングレバー19に前車輪21a,後車輪21bの回転方向と逆方向に揺動させる回転トルクが作用する。したがって、図4(b)に示すように、スイングユニット17a,17bのスイングレバー19はスイング軸18を中心として矢印方向a方向に揺動し、前部側のスイングユニット17aの前車輪21aは障害物41を乗り上げる方向に上昇し、後部側のスイングユニット17bの前車輪21aも同方向に上昇する。
このとき、前部側のスイングユニット17aの後車輪21b及び後部側のスイングユニット17bの後車輪21bは低路面40aに接地している。したがって、前車輪21a,後車輪21bの矢印方向の回転によって、図4(c)に示すように、車体12が前進するため、前部側のスイングユニット17aの前車輪21aは障害物41を乗り上げる。車体12がさらに前進すると、前部側のスイングユニット17aの後車輪21bが障害物41と当接するが、スイングレバー19がスイング軸18を中心として矢印方向a方向に揺動して前部側のスイングユニット17aの後車輪21b及び後部側のスイングユニット17bの後車輪21bを低路面40aに対して強い接地力によって前進する。
【0020】
したがって、図4(d)(e)に示すように、前部側のスイングユニット17aの後車輪21bは障害物41を乗り上げて前進する。そして、前部側のスイングユニット17aの前車輪21a,後車輪21bが高路面40bに接地し、後部側のスイングユニット17bの前車輪21a,後車輪21bが低路面40aを接地しながら前進し、後部側のスイングユニット17bの後車輪21bが障害物41に当接するが、高路面40bに接地している前部側のスイングユニット17aの前車輪21a,後車輪21bの牽引力も加わって後車輪21bは障害物41を容易に乗り上げることができる。
【0021】
このように管路内40の途中に段差からなる障害物41が存在しても、スイング軸18には回転力が加わっているため、スイング軸18を中心としてスイングレバー19に前車輪21a,後車輪21bの回転方向と逆方向に揺動させる回転トルクが作用する。そして、前部側及び後部側のスイングユニット17a,17bの前車輪21aは障害物41を乗り上げる方向に上昇することになり、このとき、後車輪21bは常に低路面40aに接地するため車体12が前進できることになる。
【0022】
なお、前記実施例においては、車体に2対のスイングユニットを設けたが、2対に限定されるものではなく、スイングユニットを3対以上設けてもよい。
また、駆動モータの回転力を車輪に伝動する回転力伝動機構として歯車によって回転力を伝動するようにしたが、タイミングベルトによって回転力を伝動するようにしてもよい。
【0023】
なお、本発明は、前記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、前記実施形態に開示されている複数の構成要素の適宜な組合せにより種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態に亘る構成要素を適宜組合わせてもよい。
【図面の簡単な説明】
【0024】
【図1】本発明の実施形態に係る自走式管内検査カメラ装置の斜視図。
【図2】同実施形態に係る自走式管内検査カメラ装置の側面図。
【図3】同実施形態に係る自走式管内検査カメラ装置の回転力伝動機構の斜視図。
【図4】同実施形態に係る自走式管内検査カメラ装置が障害物を乗り越えて前進する状態を示し、(a)〜(e)はスイングユニットの側面図。
【符号の説明】
【0025】
10…自走式管内検査カメラ装置、11…走行ユニット、17a,17b…スイングユニット、18…スイング軸、21…車輪、23…駆動モータ、34…回転力伝動機構、35…カメラユニット
【技術分野】
【0001】
本発明は、例えば水道管、下水管、ガス管などを検査する際に適用して好適な自走式管内検査カメラ装置に関する。
【背景技術】
【0002】
工場、化学プラントあるいは山間地等の不整地において、巡回検査や非常時作業等の目的のために移動を可能にした能動適応型走行車が知られている(例えば、特許文献1参照。)。
この走行車は、車体の左右両側部に2対のクローラ(キャタピラー)が、その長さ方向の中間部を支点として揺動可能に設けられている。クローラの駆動系は、中央出力軸と偏心出力軸を備えるとともに、両出力軸を回転させるモータが独立して設けられている。
【0003】
そして、両モータの回転速度を制御することにより、クローラをその長さ方向に推進させる場合とクローラをその中間部を支点として揺動させる場合の2つの自由度を実現させ、不整地であっても走行を可能にしたものである。
また、急激に衝撃を受けることなく階段を昇降できる自走車が知られている(例えば、特許文献2参照。)。
この自走車は、車体の左右両側部に前後方向に離間して2対のクローラと複数個の車輪とを備えている。そして、水平面を走行する際には車輪で走行し、階段の傾斜面を昇降する際にはクローラを階段の傾斜面に沿うように揺動させて昇降できるようにしたものである。
【特許文献1】特公平2−03754号公報
【特許文献2】特開平7−40865号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
前記特許文献1のものは、車体の左右両側部に設けた2対のクローラの駆動系が中央出力軸と偏心出力軸の両出力軸を回転させるモータが独立して設けられ、両モータの回転速度を制御して水平面の推進と不整地の走行を可能にしたものである。したがって、複数個のモータを必要と構成が複雑となるとともに、モータの駆動制御が煩雑となっている。
特許文献2のものは、水平面を走行する際には車輪で走行し、階段の傾斜面を昇降する際にはクローラを階段の傾斜面に沿うように揺動させて昇降できるようにしたものであり、車体に対してクローラを揺動及び昇降させる構成が複雑である。
【0005】
したがって、特許文献1,2のものは、装置が大型化し、カメラユニット等を搭載し、例えば水道管、下水管、ガス管などの狭い管路内を検査する管内検査カメラ装置には適さない構成である。
本発明は、前述のような事情に着目してなされたもので、その目的とするところは、管路内に段差等の障害物が存在しても、その障害物を容易に乗り越えて走行でき、管路内の検査が迅速に行なえるとともに、構成が簡単で小型化が図れる自走式管内検査カメラ装置を提供することにある。
【課題を解決するための手段】
【0006】
前記目的を達成するために、本発明の自走式管内検査カメラ装置は、検査対象管内を走行可能な走行ユニットと、前記走行ユニットに搭載され前記検査対象管内を観察するカメラユニットと、前記走行ユニットの左右両側に、かつ前後方向に離間して左右対称的に設けられ、スイング軸を中心として上下方向に揺動自在な少なくとも2対のスイングユニットと、前記各スイングユニットの前後方向の両端部に設けられた車輪と、前記走行ユニットに搭載された駆動モータと、前記駆動モータの回転力を前記スイング軸を介して前記各車輪に伝達させて前記走行ユニットを走行させるとともに前記スイングユニットに前記スイング軸を中心として回転トルクを作用させる回転力伝動機構とを具備したことを特徴とする。
【0007】
前記走行ユニットは、好ましくは、前記各車輪が前記回転力伝動機構を介して駆動される総輪駆動方式であることを特徴とする。
【0008】
前記回転力伝動機構は、好ましくは、前記走行ユニットの左右両側に対称的に配置された前記スイング軸を含む歯車群であることを特徴とする。
【0009】
前記駆動モータは、好ましくは、前記走行ユニットの中央部に1台搭載され、該走行ユニットに左右対称的に配置された前記スイングユニット及び車輪に回転トルクを伝動させる動力伝達系を有していることを特徴とする。
【0010】
前記スイングユニットは、好ましくは、前記スイング軸と一体に回転する第1の歯車、前記スイング軸を中心として上下方向に揺動自在であり、両端部に前記車輪を設けたスイングレバー及びこのスイングレバーの両端部に設けられ前記第1の歯車と噛合して前記車輪に回転力を伝達させる第2の歯車とからなり、走行中に、前記車輪に回転力を拘束する外力が作用すると、前記スイング軸を中心として前記スイングレバーを揺動させる回転トルクが作用することを特徴とする。
【0011】
前記スイングユニットは、さらに好ましくは、前記スイング軸と一体に回転する第1の歯車、前記スイング軸を中心として上下方向に揺動自在であり、両端部に前記車輪を設けたスイングレバー及びこのスイングレバーの両端部に設けられ前記第1の歯車と噛合して前記車輪に回転力を伝達させる第2の歯車とからなり、走行中に、前記車輪が障害物に接触して回転が停止すると、前記スイング軸を中心として前記スイングレバーを前記車輪の回転方向と逆方向に揺動させる回転トルクが作用し、前記車輪は前記障害物を乗り越えることを特徴とする。
【発明の効果】
【0012】
本発明によれば、走行中に、車輪が障害物に接触して回転が停止すると、スイング軸を中心としてスイングユニットが車輪の回転方向と逆方向に揺動し、回転トルクが作用して障害物を乗り上げることができる。したがって、管路内に段差等の障害物が存在しても、その障害物を容易に乗り越えて走行でき、管路内の検査が迅速に行なえるとともに、構成が簡単で小型化が図れるという効果がある。
【発明を実施するための最良の形態】
【0013】
以下、図面を参照して本発明の実施形態を説明する。
【実施例】
【0014】
図1は本発明の実施形態に係る自走式管内検査カメラ装置の斜視図、図2は同じく側面図である。図1及び図2に基づいて自走式管内検査カメラ装置10は、水道管、下水管、ガス管等の検査対象管内を走行して管路内を検査する装置であり、外部から遠隔操作により走行できるようになっている。
走行ユニット11を構成する車体12は、前部13及び後部14を有する矩形平板状のメインフレーム15の左右両側部にはサイドフレーム16が設けられている。サイドフレーム16には車体12の前後方向に離間して2対のスイングユニット17a,17bが左右対称的に設けられている。
【0015】
これらスイングユニット17a,17bにはサイドフレーム16に回転自在に軸支されたスイング軸18を中心として上下方向に揺動自在なスイングレバー19が設けられている。このスイングレバー19の長手方向の両端部には回転軸20が軸支され、この回転軸20には車輪21(前車輪21a,後車輪21b)が嵌着されている。したがって、各スイングユニット17a,17bには前車輪21a,後車輪21bが設けられており、これら前車輪21a,後車輪21bは同一径のゴムタイヤ22を有し、ゴムタイヤ22には管路の内壁面とのスリップを防止するために外周部及び外側部には凹凸部22aが形成されている。
【0016】
図3に示すよう、前記メインフレーム15の中央部における上面には正逆回転可能な駆動モータ23がその回転軸24を車体12の前部13に向けて搭載されている。さらに、メインフレーム15には回転軸24と直交するように車体12の横方向に駆動軸25が架設され、この駆動軸25は軸受台26によって回転自在に支持されている。回転軸24にはウォーム27が嵌着され、駆動軸25の中間部にはウォーム27と噛合するウォームホィール28が嵌着されている。そして、回転軸24の回転力がウォーム27とウォームホィール28を介して駆動軸25に伝動するようになっている。
駆動軸25の両端部はサイドフレーム16の内部まで延長しており、この駆動軸25の端部には駆動歯車29が嵌着されている。サイドフレーム16には駆動歯車29を挟んで車体12の前後に中間歯車30を介して従動歯車31が噛合した状態で設けられている。そして、これら従動歯車31は前記スイング軸18の一端部に嵌着されている。そして、駆動軸25の回転力が駆動歯車29、中間歯車30及び従動歯車31を介してスイング軸18に伝動するようになっている。
スイング軸18の他端部、つまりスイングユニット17a,17bの内部における中間部には第1の平歯車32が嵌着され、この第1の平歯車32は前車輪21a,後車輪21bを支持する回転軸20の嵌着された第2の平歯車33と噛合している。そして、スイング軸18の回転力が第1の平歯車32を介して第2の平歯車33に伝動して全ての前車輪21a,後車輪21bが駆動する総輪駆動方式になっており、さらに、スイング軸18を中心としてスイングレバー19を揺動させるように回転トルクを作用させる回転力伝動機構34を構成している。
【0017】
さらに、図1及び図2に示すように、前記メインフレーム15の上面における前部13には管路内を観察して検査するカメラユニット35が搭載されている。すなわち、メインフレーム15の上面には支持部材36が立設され、この支持部材36にはカメラ支持部材37が固定されている。カメラ支持部材37には管路内の前方及び側部を撮影するカメラヘッド38が設けられている。カメラユニット35には光学系(カメラレンズ)及びカラーCCDを有する撮像部が直視方向と側視方向との間で視方向切替可能に設けられ、さらにカメラユニット35には直視用集光照明部、直斜視用拡散照明部及び側視用拡散照明部により構成される照明ユニット39が設けられている。
【0018】
次に、前述のように構成された自走式管内検査カメラ装置の作用について説明する。
自走式管内検査カメラ装置10を検査対象物としての管路内にセットし、遠隔操作によって自走式管内検査カメラ装置10を前進させるべく駆動モータ23を駆動させると、回転軸24が回転する。回転軸24の回転力はウォーム27とウォームホィール28を介して駆動軸25に伝動し、駆動歯車29は図3に示す矢印方向に回転する。
駆動歯車29の回転は中間歯車30を介して従動歯車31に伝動し、従動歯車31と一体にスイング軸18が図3に示す矢印方向に回転する。スイング軸18の回転力は第1の平歯車32を介して前後の第2の平歯車33に伝動し、スイングユニット17a,17bの回転軸20を介して前車輪21a,後車輪21bが駆動する。したがって、自走式管内検査カメラ装置10は検査対象物としての管路内を総輪駆動で前進する。
このとき、照明ユニット39によって管路内を照明し、カメラユニット35によって管路内の前方及び側部を撮影することができ、管路の内壁の亀裂、腐食あるいは異物の付着等を観察することができる。
【0019】
ところで、管路内は平滑であるとは限らず、配管の接続管、溶接部あるいは配線等によって段差ができていたり、障害物が存在している場合がある。つまり、障害物によって自走式管内検査カメラ装置10の通常の走行が妨げられる場合がある。
図4は管路内40の途中に段差からなる障害物41が存在する場合を示し、障害物41を挟んで手前側が低路面40aで、先側が高路面40bを示す。自走式管内検査カメラ装置10が管路内40を走行中に、図4(a)に示すように、車体12の前部側のスイングユニット17aで、しかも前車輪21aが障害物41に当接すると、前車輪21a,後車輪21bの前進しようとする矢印方向の回転が妨げられる。
このとき、駆動歯車29の回転は中間歯車30を介して従動歯車31に伝動し、スイング軸18には回転力が加わっているため、スイング軸18を中心としてスイングレバー19に前車輪21a,後車輪21bの回転方向と逆方向に揺動させる回転トルクが作用する。したがって、図4(b)に示すように、スイングユニット17a,17bのスイングレバー19はスイング軸18を中心として矢印方向a方向に揺動し、前部側のスイングユニット17aの前車輪21aは障害物41を乗り上げる方向に上昇し、後部側のスイングユニット17bの前車輪21aも同方向に上昇する。
このとき、前部側のスイングユニット17aの後車輪21b及び後部側のスイングユニット17bの後車輪21bは低路面40aに接地している。したがって、前車輪21a,後車輪21bの矢印方向の回転によって、図4(c)に示すように、車体12が前進するため、前部側のスイングユニット17aの前車輪21aは障害物41を乗り上げる。車体12がさらに前進すると、前部側のスイングユニット17aの後車輪21bが障害物41と当接するが、スイングレバー19がスイング軸18を中心として矢印方向a方向に揺動して前部側のスイングユニット17aの後車輪21b及び後部側のスイングユニット17bの後車輪21bを低路面40aに対して強い接地力によって前進する。
【0020】
したがって、図4(d)(e)に示すように、前部側のスイングユニット17aの後車輪21bは障害物41を乗り上げて前進する。そして、前部側のスイングユニット17aの前車輪21a,後車輪21bが高路面40bに接地し、後部側のスイングユニット17bの前車輪21a,後車輪21bが低路面40aを接地しながら前進し、後部側のスイングユニット17bの後車輪21bが障害物41に当接するが、高路面40bに接地している前部側のスイングユニット17aの前車輪21a,後車輪21bの牽引力も加わって後車輪21bは障害物41を容易に乗り上げることができる。
【0021】
このように管路内40の途中に段差からなる障害物41が存在しても、スイング軸18には回転力が加わっているため、スイング軸18を中心としてスイングレバー19に前車輪21a,後車輪21bの回転方向と逆方向に揺動させる回転トルクが作用する。そして、前部側及び後部側のスイングユニット17a,17bの前車輪21aは障害物41を乗り上げる方向に上昇することになり、このとき、後車輪21bは常に低路面40aに接地するため車体12が前進できることになる。
【0022】
なお、前記実施例においては、車体に2対のスイングユニットを設けたが、2対に限定されるものではなく、スイングユニットを3対以上設けてもよい。
また、駆動モータの回転力を車輪に伝動する回転力伝動機構として歯車によって回転力を伝動するようにしたが、タイミングベルトによって回転力を伝動するようにしてもよい。
【0023】
なお、本発明は、前記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、前記実施形態に開示されている複数の構成要素の適宜な組合せにより種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態に亘る構成要素を適宜組合わせてもよい。
【図面の簡単な説明】
【0024】
【図1】本発明の実施形態に係る自走式管内検査カメラ装置の斜視図。
【図2】同実施形態に係る自走式管内検査カメラ装置の側面図。
【図3】同実施形態に係る自走式管内検査カメラ装置の回転力伝動機構の斜視図。
【図4】同実施形態に係る自走式管内検査カメラ装置が障害物を乗り越えて前進する状態を示し、(a)〜(e)はスイングユニットの側面図。
【符号の説明】
【0025】
10…自走式管内検査カメラ装置、11…走行ユニット、17a,17b…スイングユニット、18…スイング軸、21…車輪、23…駆動モータ、34…回転力伝動機構、35…カメラユニット
【特許請求の範囲】
【請求項1】
検査対象管内を走行可能な走行ユニットと、
前記走行ユニットに搭載され前記検査対象管内を観察するカメラユニットと、
前記走行ユニットの左右両側に、かつ前後方向に離間して左右対称的に設けられ、スイング軸を中心として上下方向に揺動自在な少なくとも2対のスイングユニットと、
前記各スイングユニットの前後方向の両端部に設けられた車輪と、
前記走行ユニットに搭載された駆動モータと、
前記駆動モータの回転力を前記スイング軸を介して前記各車輪に伝達させて前記走行ユニットを走行させるとともに前記スイングユニットに前記スイング軸を中心として回転トルクを作用させる回転力伝動機構と、
を具備したことを特徴とする自走式管内検査カメラ装置。
【請求項2】
前記走行ユニットは、前記各車輪が前記回転力伝動機構を介して駆動される総輪駆動方式であることを特徴とする請求項1に記載の自走式管内検査カメラ装置。
【請求項3】
前記回転力伝動機構は、前記走行ユニットの左右両側に対称的に配置された前記スイング軸を含む歯車群であることを特徴とする請求項1に記載の自走式管内検査カメラ装置。
【請求項4】
前記駆動モータは、前記走行ユニットの中央部に1台搭載され、該走行ユニットに左右対称的に配置された前記スイングユニット及び車輪に回転トルクを伝動させる動力伝達系を有していることを特徴とする請求項1に記載の自走式管内検査カメラ装置。
【請求項5】
前記スイングユニットは、前記スイング軸と一体に回転する第1の歯車、前記スイング軸を中心として上下方向に揺動自在であり、両端部に前記車輪を設けたスイングレバー及びこのスイングレバーの両端部に設けられ前記第1の歯車と噛合して前記車輪に回転力を伝達させる第2の歯車とからなり、走行中に、前記車輪に回転力を拘束する外力が作用すると、前記スイング軸を中心として前記スイングレバーを揺動させる回転トルクが作用することを特徴とする請求項1に記載の自走式管内検査カメラ装置。
【請求項6】
前記スイングユニットは、前記スイング軸と一体に回転する第1の歯車、前記スイング軸を中心として上下方向に揺動自在であり、両端部に前記車輪を設けたスイングレバー及びこのスイングレバーの両端部に設けられ前記第1の歯車と噛合して前記車輪に回転力を伝達させる第2の歯車とからなり、走行中に、前記車輪が障害物に接触して回転が停止すると、前記スイング軸を中心として前記スイングレバーを前記車輪の回転方向と逆方向に揺動させる回転トルクが作用し、前記車輪は前記障害物を乗り越えることを特徴とする請求項1に記載の自走式管内検査カメラ装置。
【請求項1】
検査対象管内を走行可能な走行ユニットと、
前記走行ユニットに搭載され前記検査対象管内を観察するカメラユニットと、
前記走行ユニットの左右両側に、かつ前後方向に離間して左右対称的に設けられ、スイング軸を中心として上下方向に揺動自在な少なくとも2対のスイングユニットと、
前記各スイングユニットの前後方向の両端部に設けられた車輪と、
前記走行ユニットに搭載された駆動モータと、
前記駆動モータの回転力を前記スイング軸を介して前記各車輪に伝達させて前記走行ユニットを走行させるとともに前記スイングユニットに前記スイング軸を中心として回転トルクを作用させる回転力伝動機構と、
を具備したことを特徴とする自走式管内検査カメラ装置。
【請求項2】
前記走行ユニットは、前記各車輪が前記回転力伝動機構を介して駆動される総輪駆動方式であることを特徴とする請求項1に記載の自走式管内検査カメラ装置。
【請求項3】
前記回転力伝動機構は、前記走行ユニットの左右両側に対称的に配置された前記スイング軸を含む歯車群であることを特徴とする請求項1に記載の自走式管内検査カメラ装置。
【請求項4】
前記駆動モータは、前記走行ユニットの中央部に1台搭載され、該走行ユニットに左右対称的に配置された前記スイングユニット及び車輪に回転トルクを伝動させる動力伝達系を有していることを特徴とする請求項1に記載の自走式管内検査カメラ装置。
【請求項5】
前記スイングユニットは、前記スイング軸と一体に回転する第1の歯車、前記スイング軸を中心として上下方向に揺動自在であり、両端部に前記車輪を設けたスイングレバー及びこのスイングレバーの両端部に設けられ前記第1の歯車と噛合して前記車輪に回転力を伝達させる第2の歯車とからなり、走行中に、前記車輪に回転力を拘束する外力が作用すると、前記スイング軸を中心として前記スイングレバーを揺動させる回転トルクが作用することを特徴とする請求項1に記載の自走式管内検査カメラ装置。
【請求項6】
前記スイングユニットは、前記スイング軸と一体に回転する第1の歯車、前記スイング軸を中心として上下方向に揺動自在であり、両端部に前記車輪を設けたスイングレバー及びこのスイングレバーの両端部に設けられ前記第1の歯車と噛合して前記車輪に回転力を伝達させる第2の歯車とからなり、走行中に、前記車輪が障害物に接触して回転が停止すると、前記スイング軸を中心として前記スイングレバーを前記車輪の回転方向と逆方向に揺動させる回転トルクが作用し、前記車輪は前記障害物を乗り越えることを特徴とする請求項1に記載の自走式管内検査カメラ装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2008−89516(P2008−89516A)
【公開日】平成20年4月17日(2008.4.17)
【国際特許分類】
【出願番号】特願2006−273356(P2006−273356)
【出願日】平成18年10月4日(2006.10.4)
【出願人】(000220620)東芝テリー株式会社 (116)
【Fターム(参考)】
【公開日】平成20年4月17日(2008.4.17)
【国際特許分類】
【出願日】平成18年10月4日(2006.10.4)
【出願人】(000220620)東芝テリー株式会社 (116)
【Fターム(参考)】
[ Back to top ]