
自車両位置特定装置
【課題】 複数出口付領域から自車両が退出した場合に、退出した出口を精度よく推定することができ、もって自車両位置を精度よく特定することができる自車両位置特定装置を提供する。
【解決手段】車車間通信ECU1は、車車間通信情報処理部11において、自車両VSの走行開始を判断する。また、車車間情報処理部11は、他車両V1から送信される他車両情報に基づいて他車両の位置を取得する。退出出口推定部14は、他車両の位置に基づいて、自車両VSが退出した出口が、複数の出口のいずれであるかを推定する。
【解決手段】車車間通信ECU1は、車車間通信情報処理部11において、自車両VSの走行開始を判断する。また、車車間情報処理部11は、他車両V1から送信される他車両情報に基づいて他車両の位置を取得する。退出出口推定部14は、他車両の位置に基づいて、自車両VSが退出した出口が、複数の出口のいずれであるかを推定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自車両の位置を特定する自車両位置特定装置に係り、特に、駐車場から出発した際の自車両の位置を特定する場合に用いて好適な自車両位置特定装置に関する。
【背景技術】
【0002】
車両に搭載されるナビゲーション装置においては、自車両の現在位置である自車両位置を特定して、特定した自車両位置に基づいて経路案内などの処理が行われる。このような自車両を特定する装置として、従来、駐車場の自動料金収受システムにおけるDSRC(Dedicated Short RangeCommunication、専用狭域)通信を用いた現在位置算出装置がある(たとえば特許文献1参照)。
【0003】
この現在位置算出装置は、GPS信号などに基づいて見掛け上の現在位置を算出し、駐車場の自動料金収受システムとの間でDSRC通信を行った場合に、現在位置を修正するというものである。たとえば、走行中に駐車場の近傍の道路を走行中の車両が曲がった場合に、DSRC通信を行っていなければ、車両は道路を走行していると判断し、DSRC通信を行っていれば、車両の現在位置を駐車場内に修正する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−289653号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記特許文献1に記載された現在位置算出装置は、駐車場に進入する場合のほか、駐車場から退出する場合についても、自車両の位置を駐車場から道路に修正する形で利用することもできる。しかし、上記特許文献1に開示された現在位置算出装置では、駐車場に自動料金収受システムが設けられていない場合には利用することができなかった。このため、たとえば駐車場などの複数の出口が設けられた領域(以下「複数出口付領域」という)がある場合に、自車両がどの出口から退出したかを誤って認識してしまい、現在位置を精度よく特定することができない場合があるという問題があった。
【0006】
そこで、本発明の課題は、複数出口付領域から自車両が退出した場合に、退出した出口を精度よく推定することができ、もって自車両位置を精度よく特定することができる自車両位置特定装置を提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決した本発明に係る自車両位置特定装置は、自車両の現在位置である自車両位置を特定する自車両位置特定装置であって、複数の出口が設けられた領域である複数出口付領域における自車両の走行開始を判断する走行開始判断手段と、自車両の周囲における他車両が送信する他車両の位置を取得する他車両位置取得手段と、他車両位置取得手段によって取得された他車両の位置に基づいて、自車両が退出した出口が、複数の出口のいずれであるかを推定する退出出口推定手段と、退出出口推定手段による推定結果に基づいて、自車両位置を特定することを特徴とする。
【0008】
本発明に係る自車両位置特定装置においては、駐車場等の複数の出口が設けられた複数出口付領域から自車両が退出した出口を推定し、その推定結果に基づいて自車両位置を特定している。このため、自車両が退出した出口を誤って認識することを防止することができる。したがって、複数出口付領域から自車両が退出した場合に、退出した出口を精度よく推定することができ、もって自車両位置を精度よく特定することができる。
【0009】
ここで、複数の出口のそれぞれに対して、出口から退出した際における車両が走行する確率が高い領域である高確率走行路領域をそれぞれ取得する高確率走行路領域取得手段と、高確率走行路領域における他車両の数を取得する走行車両数取得手段と、高確率走行路領域における他車両の数に基づいて、自車両の位置が含まれる高確率走行路領域を判定する自車両走行領域判定手段と、をさらに備え、退出出口推定手段は、自車両走行領域判定手段における判定結果に基づいて、自車両が退出した出口が、複数の出口のいずれであるかを推定する態様とすることができる。
【0010】
本発明に係る自車両位置特定装置においては、出口から退出した際における車両が走行する確率が高い高確率走行路領域における他車両の数に基づいて、自車両の位置が含まれる高確率走行路領域を判定し、その判定結果に基づいて自車両が退出した出口を推定している。このため、たとえば複数出口付領域に自動領域収受システムが設けられていない場合等においても、自車両が退出した出口を精度よく推定することができる。
【0011】
また、他車両位置取得手段で取得された他車両の存在領域を検出する他車両存在領域検出手段と、他車両存在領域の時間変化を記憶する他車両存在領域時間変化記憶手段と、をさらに備え、退出出口推定手段は、他車両存在領域の時間変化に基づいて、自車両が退出した出口が、複数の出口のいずれであるかを推定する態様とすることができる。
【0012】
このように、他車両存在領域の時間変化に基づいて、自車両が退出した出口を推定することにより、たとえば複数出口付領域に自動領域収受システムが設けられていない場合等においても、自車両が退出した出口を精度よく推定することができる。
【0013】
さらに、自車両の走行履歴を取得する走行履歴取得手段をさらに備え、退出出口推定手段による推定結果および走行履歴取得手段に取得された走行履歴に基づいて、自車両の位置を特定する態様とすることができる。
【0014】
このように、自車両の走行履歴に基づいて自車両位置を特定することにより、自車両の位置を精度よく特定することができる。
【発明の効果】
【0015】
本発明に係る自車両位置特定装置によれば、複数出口付領域から自車両が退出した場合に、退出した出口を精度よく推定することができ、もって自車両位置を精度よく特定することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の実施形態に係る自車両位置特定装置を備える車両のブロック構成図である。
【図2】本発明の実施形態に係る車車間通信ECUにおける処理手順を示すフローチャートである。
【図3】駐車場における出口とその周辺道路との関係を模式的に示す模式図である。
【図4】(a)は、駐車場における出口と他車両存在領域を模式的に示す模式図、(b)は、(a)の所定時間後を示す模式図である。
【発明を実施するための形態】
【0017】
以下、添付図面を参照して本発明の実施形態について説明する。なお、図面の説明において同一の要素には同一の符号を付し、重複する説明を省略する。また、図示の便宜上、図面の寸法比率は説明のものと必ずしも一致しない。本実施形態に係る自車両位置特定装置は、たとえばナビゲーション装置によって道案内をする際に、自車両の位置を特定する際に用いられる。
【0018】
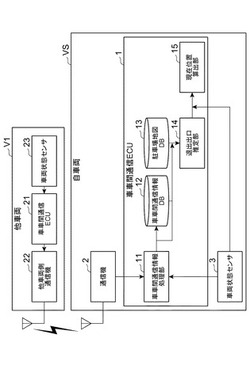
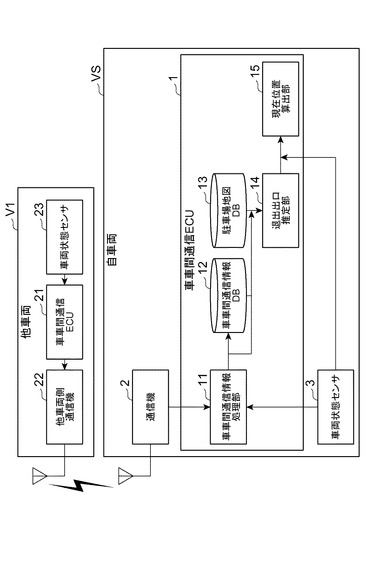
図1は、本発明の実施形態に係る自車両位置特定装置を備える車両のブロック構成図である。図1に示すように、本実施形態に係る自車両VSは、自車両位置特定装置となる車車間通信ECU(Electronic Control Unit)1、通信機2、および車両状態センサ3を備えている。さらに、他車両V1には、自車両VSと同様の車車間通信報ECU21、通信機(以下「他車両側通信機」という)22、および車両状態センサ23が設けられている。
【0019】
また、自車両VSにおける車車間通信ECU1には、車車間通信情報処理部11、車車間通信情報データベース(以下「DB」という)12、および駐車場地図DB13が設けられている。さらに、車車間通信ECU1には、退出出口推定部14および現在位置算出部15が設けられている。
【0020】
通信機2は、他車両V1に設けられた他車両側通信機22との間で双方向通信が可能とされている。通信機2は、他車両V1における他車両側通信機22から送信される各種情報を受信する。さらに、通信機2は、受信した各種情報を車車間通信ECU1における車車間通信情報処理部11に送信する。他車両側通信機22から送信される各種情報には、他車両V1の位置情報である他車両位置情報および他車両位置情報を取得した際の精度に関する精度情報が含まれる。
【0021】
車両状態センサ3は、車速センサやヨーレートセンサなどを備えて構成されており、車両状態を検出している。ここで、車両状態には、自車両VSの走行速度、走行方向などが含まれる。車両状態センサ3は、検出した自車両VSの車両状態を車車間通信ECU1における車車間通信情報処理部11および現在位置算出部15に車両状態情報として送信する。
【0022】
車車間通信ECU1における車車間通信情報処理部11は、通信機2を介して他車両側通信機22から送信される各種情報のうち、他車両V1の位置に関する他車両位置情報に基づいて、他車両V1の他車両位置情報を地図上にマッピングする。また、他車両位置情報には、精度情報が付加されている。車車間通信情報処理部11は、他車両位置取得手段を構成する。
【0023】
車車間通信情報処理部11は、マッピングした他車両位置を車車間通信情報DB12に記憶させる。さらに、車車間通信情報処理部11は、車両が走行を開始した後、最初に他車両位置情報を受信した場合には、他車両位置情報受信開始情報を退出出口推定部14に出力する。車両の走行の開始については、車両状態センサ3から出力される車速情報に基づいて判断する。車車間通信情報処理部11は、走行開始判断手段を構成する。
【0024】
車車間通信情報DB12は、車車間通信情報処理部11から他車両位置情報が送信されるたびに、送信された他車両位置情報を記憶している。このため、車車間通信情報DB12には、複数の他車両位置情報が記憶されている。車車間通信情報DB12は、退出出口推定部14の読み出しに応じて、記憶している他車両位置情報を退出出口推定部14に出力する。
【0025】
駐車場地図DB13には、地図上における複数出口付領域である駐車場の位置に関する駐車場位置情報やその駐車場における出口の位置に関する出口位置情報が記憶されている。また、複数の出口がある場合には、それぞれの出口に関する出口位置情報が記憶されている。さらに、駐車場地図DB13は、出口から退出した車両が車車間通信を行うと想定される領域であり、本発明の高確率走行路領域となる通信想定エリアに関する想定エリア情報をそれぞれの出口に対して記憶している。
【0026】
駐車場地図DB13は、退出出口推定部14の読み出に応じて、記憶している駐車場位置情報および出口位置情報を退出出口推定部14に出力する。また、駐車場地図DB13は、出口位置情報を出力する際、出口位置情報に対応する想定エリア情報を合わせて退出出口推定部14に出力する。
【0027】
退出出口推定部14は、車車間通信情報処理部11から他車両位置情報受信開始情報を出力されたら、車車間通信情報DB12に記憶されている他車両位置情報を読み出す。同時に。駐車場地図DB13に記憶されている駐車場位置情報および出口位置情報を読み出す。
【0028】
退出出口推定部14は、読み出した駐車場位置情報から、自車両が利用していた駐車場を特定する。また、車車間通信情報DB12から読み出した他車両位置情報および駐車場地図DB13から読み出した出口位置情報と想定エリア情報に基づいて、自車両が駐車場を退出する際に利用した退出出口を推定する。退出出口推定部14は、推定結果となる退出出口に関する退出出口情報を現在位置算出部15に出力する。退出出口推定部14は、走行車両数取得手段、自車両走行領域判定手段、高確率走行路領域検出手段、および退出出口推定手段を構成する。
【0029】
現在位置算出部15は、車両状態センサ3から送信された車両状態情報に基づいて、自車両VSの走行履歴を算出する。ここでの走行履歴には、自車両が走行した際の走行軌跡が含まれる。さらに、現在位置算出部15は、算出した自車両の走行履歴および退出出口推定部14から出力された退出出口情報に基づいて、自車両の現在位置を算出する。現在位置算出部15は、走行履歴取得手段を構成する。
【0030】
さらに、現在位置算出部15は、GPS(Global Positioning System)装置を備えており、GPS衛星から送信されるGPS信号を用いて自車両の現在位置を算出している。ここでの自車両の現在位置の算出の際には、マップマッチングなどによる補正を行って自車両の現在位置を補正している。現在位置算出部15では、走行履歴に基づいて算出した自車両の現在位置またはGPS信号を用いて算出した自車両の現在位置のいずれかを実際の自車両の現在位置として採用している。
【0031】
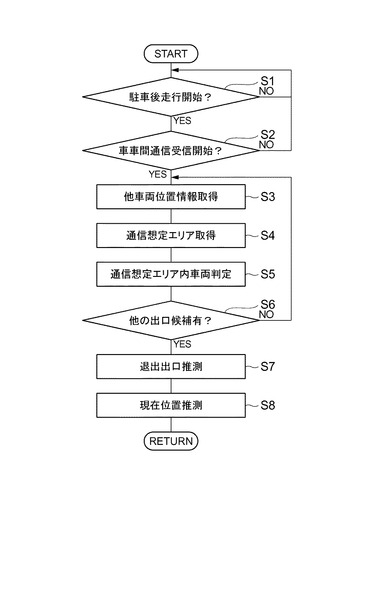
次に、本実施形態に係る車車間通信ECU1における処理手順について説明する。図2は、車車間通信ECUにおける処理手順を示すフローチャートである。図2に示すように、車車間通信ECU1においては、最初に、自車両VSが駐車場からの走行を開始したか否かを判断する(S1)。自車両VSが駐車場からの走行を開始したか否かについては、現在位置算出部15において、現在位置が駐車場であり、かつ走行速度が0から増加したか否かにより判断する。
【0032】
その結果、自車両VSが駐車場からの走行を開始していないと判断した場合には、ステップS1に戻って処理を繰り返す。一方、自車両VSが駐車場からの走行を開始したと判断した場合には、自車両VSが周囲を走行する他車両V1との間で車車間通信を開始したか否かを判断する(S2)。
【0033】
ここで、車車間通信を開始していないと判断した場合には、ステップS1に戻り、処理を繰り返す。一方、車車間通信を開始したと判断した場合には、退出出口推定部14は、車車間通信情報DB12から他車両位置情報を読み出して取得し(S3)、次に、駐車場地図DB13から退出出口情報および想定エリア情報を読み出して、通信想定エリアを取得する(S4)。
【0034】
続いて、退出出口推定部14において、通信想定エリア内の車両判定を行う(S5)。この車両判定では、自車両が退出したと推定される特定の出口の候補である出口候補を決定する。それから決定した出口候補に対応する通信想定エリア内における他車両位置情報を送信している他車両の数を計測する。
【0035】
その後、他車両の数を計測していない他の出口候補の有無を判断する(S6)。ここで、他の出口候補がある場合には、ステップS4に戻り、他の出口候補についての通信想定エリアを取得する。それから、取得した通信想定エリアにおける他車両の数を計測する。こうして、他車両の数の計測が済んでいない通信想定エリアがなくなるまで同様の作業を行う。
【0036】
また、他の出口候補がなくなり、すべての出口候補に対して通信想定エリアにおける他車両の数の計測が済んだら、自車両が退出した出口の推測を行う(S7)。自車両が退出した出口の推測では、複数の通信想定エリアにおける他車両の数を比較し、この比較結果から自車両の現在位置を推測する。たとえば、複数の通信想定エリアにおける他車両の数を比較した結果、他車両がもっとも多い通信想定エリアを算出し、この通信想定エリアに対応する出口から自車両が退出したと推測する。
【0037】
たとえば、図3に示すように、駐車場Pに第1出口E1および第2出口E2の2つの出口があり、第1出口E1は、第1道路R1に面しており、第2出口E2は第2道路R2に面しているとする。このとき、自車両VSが駐車場Pから退出する際、第1出口E1から退出した場合には、第1道路R1を通行することになる。
【0038】
自車両VSが第1道路R1を通行する場合、第1通信想定エリア41内における他車両V1と多くの車車間通信を行うと考えられる。一方、自車両VSが駐車場Pから退出する際、第2出口E2から退出した場合には、第2道路R2を通行することになる。自車両VSが第2道路R2を通行する場合、第2通信想定エリア42内における他車両V1と多くの車車間通信を行うと考えられる。
【0039】
そこで、ステップS7において、第1通信想定エリア41内における自車両と車車間通信を行う他車両の数と、第2通信想定エリア42内における自車両と車車間通信を行う他車両の数とを比較する。その結果、第1通信想定エリア41内における他車両の数が多いと判断した場合には、自車両VSが退出した退出出口を第1出口E1と判断する。一方、第2通信想定エリア42内における他車両の数が多いと判断した場合には、自車両VSが退出した退出出口を第2出口E2と判断する。
【0040】
こうして退出出口を判断したら、現在位置算出部15において、自車両VSの現在位置を算出する(S8)。現在位置を算出する際には、現在位置算出部15において、車両状態センサ3から送信された車両状態情報に基づいて、自車両VSの走行履歴を算出する。ここで算出した走行履歴と、退出出口推定部14で推定した退出出口情報に基づいて、車両の現在位置を算出する。こうして、車車間通信ECU1における処理を終了する。
【0041】
このように、本実施形態に係る車車間通信ECU1においては、駐車場Pから自車両VSが退出した退出出口を複数の退出出口の中から推定し、その推定結果に基づいて自車両位置を特定している。このため、自車両VSが退出した退出出口を誤って認識することを防止することができる。したがって駐車場Pから自車両VSが退出した場合に、退出出口を精度よく推定することができ、もって自車両位置を精度よく算出して特定することができる。
【0042】
また、退出出口から退出した際における自車両VSが走行する確率が高い通信想定エリアにおける他車両V1の数に基づいて、自車両VSの位置が含まれる通信想定エリアを推定し、その推定結果に基づいて自車両が退出した出口を推定している。このため、たとえば駐車場Pに自動領域収受システムが設けられていない場合等においても、自車両が退出した出口を精度よく特定することができる。
【0043】
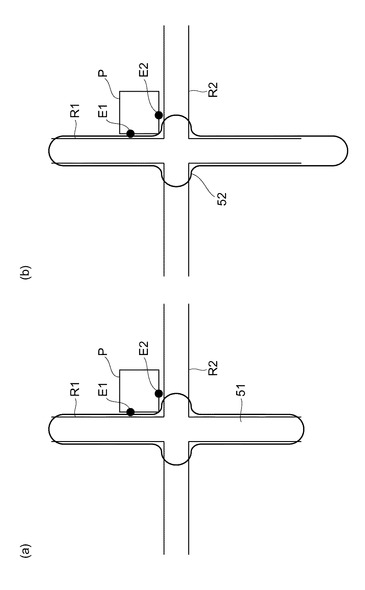
以上、本発明の好適な実施形態について説明したが、本発明は上記の実施形態に限定されるものではない。たとえば、上記実施形態においては、退出出口を推定する際に、予め記憶された通信想定エリアを利用しているが、他の態様とすることもできる。たとえば、駐車場から退出した後に自車両が車車間通信を行っている他車両の位置をマップ化し、自車両が車車間通信を行っている他車両が存在する他車両存在領域を取得する。この他車両存在領域の時間変化を記憶しておき、他車両存在領域の時間変化に基づいて退出出口を推定する態様とすることもできる。
【0044】
具体的に、図4(a)に示すように、自車両VSが駐車場Pから退出する際、第1出口E1から退出した場合には、他車両存在エリア51内において他車両V1からの他車両情報が送信されたとする。しかし、この状態では、自車両VSが第1出口E1から退出したのではなく、第2出口E2から退出した可能性もある。
【0045】
そこで、他車両存在領域の経時変化を参照する。たとえば、t秒後には、図4(b)に示すように、次時間他車両通信エリア52が、図4(a)に示す他車両存在エリア51よりも第1道路R1に沿って長くなるように広がっていたとする。この場合には、自車両VSは、第1道路R1を走行していると考えられ、第1出口E1を退出したと推定することができる。
【0046】
このように、他車両存在領域の経時変化に基づいて、自車両VSの退出出口を推定することもできる。他車両存在領域の経時変化に基づいて自車両VSの退出出口を推定する際には、所定時間、たとえば1秒ごと他車両存在領域を比較し、その変化を参照することができる。
【0047】
また、上記実施形態においては、複数出口付領域として駐車場を例示しているが、駐車場以外の領域、たとえばインターチェンジなどとする態様とすることができる。さらに、上記実施形態においては、通信想定エリアを推定する際に、通信想定エリア内における他車両の数を単純に比較しているが、他の態様とすることもできる。たとえば、通信想定エリア内における交通量に対する他車両の数を比較する態様とすることができる。また、退出出口を推定するにあたり、他車両位置情報に付加されている精度情報を利用することもできる。たとえば、他車両位置の精度が高い他車両位置情報について、他車両位置の精度が低い他車両位置情報よりも優位に扱う態様とすることができる。
【符号の説明】
【0048】
1…車車間通信ECU、2…通信機、3…車両状態センサ、11…車車間通信情報処理部、12…車車間通信情報DB、13…駐車場地図DB、14…退出出口推定部、15…現在位置算出部、21…車車間通信報ECU、22…他車両側通信機、23…車両状態センサ、41…通信想定エリア、42…通信想定エリア、51…他車両存在エリア、52…次時間他車両通信エリア、E1…第1出口、E2…第2出口、P…駐車場、R1…第1道路、R2…第2道路、V1…他車両、VS…自車両。
【技術分野】
【0001】
本発明は、自車両の位置を特定する自車両位置特定装置に係り、特に、駐車場から出発した際の自車両の位置を特定する場合に用いて好適な自車両位置特定装置に関する。
【背景技術】
【0002】
車両に搭載されるナビゲーション装置においては、自車両の現在位置である自車両位置を特定して、特定した自車両位置に基づいて経路案内などの処理が行われる。このような自車両を特定する装置として、従来、駐車場の自動料金収受システムにおけるDSRC(Dedicated Short RangeCommunication、専用狭域)通信を用いた現在位置算出装置がある(たとえば特許文献1参照)。
【0003】
この現在位置算出装置は、GPS信号などに基づいて見掛け上の現在位置を算出し、駐車場の自動料金収受システムとの間でDSRC通信を行った場合に、現在位置を修正するというものである。たとえば、走行中に駐車場の近傍の道路を走行中の車両が曲がった場合に、DSRC通信を行っていなければ、車両は道路を走行していると判断し、DSRC通信を行っていれば、車両の現在位置を駐車場内に修正する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−289653号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記特許文献1に記載された現在位置算出装置は、駐車場に進入する場合のほか、駐車場から退出する場合についても、自車両の位置を駐車場から道路に修正する形で利用することもできる。しかし、上記特許文献1に開示された現在位置算出装置では、駐車場に自動料金収受システムが設けられていない場合には利用することができなかった。このため、たとえば駐車場などの複数の出口が設けられた領域(以下「複数出口付領域」という)がある場合に、自車両がどの出口から退出したかを誤って認識してしまい、現在位置を精度よく特定することができない場合があるという問題があった。
【0006】
そこで、本発明の課題は、複数出口付領域から自車両が退出した場合に、退出した出口を精度よく推定することができ、もって自車両位置を精度よく特定することができる自車両位置特定装置を提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決した本発明に係る自車両位置特定装置は、自車両の現在位置である自車両位置を特定する自車両位置特定装置であって、複数の出口が設けられた領域である複数出口付領域における自車両の走行開始を判断する走行開始判断手段と、自車両の周囲における他車両が送信する他車両の位置を取得する他車両位置取得手段と、他車両位置取得手段によって取得された他車両の位置に基づいて、自車両が退出した出口が、複数の出口のいずれであるかを推定する退出出口推定手段と、退出出口推定手段による推定結果に基づいて、自車両位置を特定することを特徴とする。
【0008】
本発明に係る自車両位置特定装置においては、駐車場等の複数の出口が設けられた複数出口付領域から自車両が退出した出口を推定し、その推定結果に基づいて自車両位置を特定している。このため、自車両が退出した出口を誤って認識することを防止することができる。したがって、複数出口付領域から自車両が退出した場合に、退出した出口を精度よく推定することができ、もって自車両位置を精度よく特定することができる。
【0009】
ここで、複数の出口のそれぞれに対して、出口から退出した際における車両が走行する確率が高い領域である高確率走行路領域をそれぞれ取得する高確率走行路領域取得手段と、高確率走行路領域における他車両の数を取得する走行車両数取得手段と、高確率走行路領域における他車両の数に基づいて、自車両の位置が含まれる高確率走行路領域を判定する自車両走行領域判定手段と、をさらに備え、退出出口推定手段は、自車両走行領域判定手段における判定結果に基づいて、自車両が退出した出口が、複数の出口のいずれであるかを推定する態様とすることができる。
【0010】
本発明に係る自車両位置特定装置においては、出口から退出した際における車両が走行する確率が高い高確率走行路領域における他車両の数に基づいて、自車両の位置が含まれる高確率走行路領域を判定し、その判定結果に基づいて自車両が退出した出口を推定している。このため、たとえば複数出口付領域に自動領域収受システムが設けられていない場合等においても、自車両が退出した出口を精度よく推定することができる。
【0011】
また、他車両位置取得手段で取得された他車両の存在領域を検出する他車両存在領域検出手段と、他車両存在領域の時間変化を記憶する他車両存在領域時間変化記憶手段と、をさらに備え、退出出口推定手段は、他車両存在領域の時間変化に基づいて、自車両が退出した出口が、複数の出口のいずれであるかを推定する態様とすることができる。
【0012】
このように、他車両存在領域の時間変化に基づいて、自車両が退出した出口を推定することにより、たとえば複数出口付領域に自動領域収受システムが設けられていない場合等においても、自車両が退出した出口を精度よく推定することができる。
【0013】
さらに、自車両の走行履歴を取得する走行履歴取得手段をさらに備え、退出出口推定手段による推定結果および走行履歴取得手段に取得された走行履歴に基づいて、自車両の位置を特定する態様とすることができる。
【0014】
このように、自車両の走行履歴に基づいて自車両位置を特定することにより、自車両の位置を精度よく特定することができる。
【発明の効果】
【0015】
本発明に係る自車両位置特定装置によれば、複数出口付領域から自車両が退出した場合に、退出した出口を精度よく推定することができ、もって自車両位置を精度よく特定することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の実施形態に係る自車両位置特定装置を備える車両のブロック構成図である。
【図2】本発明の実施形態に係る車車間通信ECUにおける処理手順を示すフローチャートである。
【図3】駐車場における出口とその周辺道路との関係を模式的に示す模式図である。
【図4】(a)は、駐車場における出口と他車両存在領域を模式的に示す模式図、(b)は、(a)の所定時間後を示す模式図である。
【発明を実施するための形態】
【0017】
以下、添付図面を参照して本発明の実施形態について説明する。なお、図面の説明において同一の要素には同一の符号を付し、重複する説明を省略する。また、図示の便宜上、図面の寸法比率は説明のものと必ずしも一致しない。本実施形態に係る自車両位置特定装置は、たとえばナビゲーション装置によって道案内をする際に、自車両の位置を特定する際に用いられる。
【0018】
図1は、本発明の実施形態に係る自車両位置特定装置を備える車両のブロック構成図である。図1に示すように、本実施形態に係る自車両VSは、自車両位置特定装置となる車車間通信ECU(Electronic Control Unit)1、通信機2、および車両状態センサ3を備えている。さらに、他車両V1には、自車両VSと同様の車車間通信報ECU21、通信機(以下「他車両側通信機」という)22、および車両状態センサ23が設けられている。
【0019】
また、自車両VSにおける車車間通信ECU1には、車車間通信情報処理部11、車車間通信情報データベース(以下「DB」という)12、および駐車場地図DB13が設けられている。さらに、車車間通信ECU1には、退出出口推定部14および現在位置算出部15が設けられている。
【0020】
通信機2は、他車両V1に設けられた他車両側通信機22との間で双方向通信が可能とされている。通信機2は、他車両V1における他車両側通信機22から送信される各種情報を受信する。さらに、通信機2は、受信した各種情報を車車間通信ECU1における車車間通信情報処理部11に送信する。他車両側通信機22から送信される各種情報には、他車両V1の位置情報である他車両位置情報および他車両位置情報を取得した際の精度に関する精度情報が含まれる。
【0021】
車両状態センサ3は、車速センサやヨーレートセンサなどを備えて構成されており、車両状態を検出している。ここで、車両状態には、自車両VSの走行速度、走行方向などが含まれる。車両状態センサ3は、検出した自車両VSの車両状態を車車間通信ECU1における車車間通信情報処理部11および現在位置算出部15に車両状態情報として送信する。
【0022】
車車間通信ECU1における車車間通信情報処理部11は、通信機2を介して他車両側通信機22から送信される各種情報のうち、他車両V1の位置に関する他車両位置情報に基づいて、他車両V1の他車両位置情報を地図上にマッピングする。また、他車両位置情報には、精度情報が付加されている。車車間通信情報処理部11は、他車両位置取得手段を構成する。
【0023】
車車間通信情報処理部11は、マッピングした他車両位置を車車間通信情報DB12に記憶させる。さらに、車車間通信情報処理部11は、車両が走行を開始した後、最初に他車両位置情報を受信した場合には、他車両位置情報受信開始情報を退出出口推定部14に出力する。車両の走行の開始については、車両状態センサ3から出力される車速情報に基づいて判断する。車車間通信情報処理部11は、走行開始判断手段を構成する。
【0024】
車車間通信情報DB12は、車車間通信情報処理部11から他車両位置情報が送信されるたびに、送信された他車両位置情報を記憶している。このため、車車間通信情報DB12には、複数の他車両位置情報が記憶されている。車車間通信情報DB12は、退出出口推定部14の読み出しに応じて、記憶している他車両位置情報を退出出口推定部14に出力する。
【0025】
駐車場地図DB13には、地図上における複数出口付領域である駐車場の位置に関する駐車場位置情報やその駐車場における出口の位置に関する出口位置情報が記憶されている。また、複数の出口がある場合には、それぞれの出口に関する出口位置情報が記憶されている。さらに、駐車場地図DB13は、出口から退出した車両が車車間通信を行うと想定される領域であり、本発明の高確率走行路領域となる通信想定エリアに関する想定エリア情報をそれぞれの出口に対して記憶している。
【0026】
駐車場地図DB13は、退出出口推定部14の読み出に応じて、記憶している駐車場位置情報および出口位置情報を退出出口推定部14に出力する。また、駐車場地図DB13は、出口位置情報を出力する際、出口位置情報に対応する想定エリア情報を合わせて退出出口推定部14に出力する。
【0027】
退出出口推定部14は、車車間通信情報処理部11から他車両位置情報受信開始情報を出力されたら、車車間通信情報DB12に記憶されている他車両位置情報を読み出す。同時に。駐車場地図DB13に記憶されている駐車場位置情報および出口位置情報を読み出す。
【0028】
退出出口推定部14は、読み出した駐車場位置情報から、自車両が利用していた駐車場を特定する。また、車車間通信情報DB12から読み出した他車両位置情報および駐車場地図DB13から読み出した出口位置情報と想定エリア情報に基づいて、自車両が駐車場を退出する際に利用した退出出口を推定する。退出出口推定部14は、推定結果となる退出出口に関する退出出口情報を現在位置算出部15に出力する。退出出口推定部14は、走行車両数取得手段、自車両走行領域判定手段、高確率走行路領域検出手段、および退出出口推定手段を構成する。
【0029】
現在位置算出部15は、車両状態センサ3から送信された車両状態情報に基づいて、自車両VSの走行履歴を算出する。ここでの走行履歴には、自車両が走行した際の走行軌跡が含まれる。さらに、現在位置算出部15は、算出した自車両の走行履歴および退出出口推定部14から出力された退出出口情報に基づいて、自車両の現在位置を算出する。現在位置算出部15は、走行履歴取得手段を構成する。
【0030】
さらに、現在位置算出部15は、GPS(Global Positioning System)装置を備えており、GPS衛星から送信されるGPS信号を用いて自車両の現在位置を算出している。ここでの自車両の現在位置の算出の際には、マップマッチングなどによる補正を行って自車両の現在位置を補正している。現在位置算出部15では、走行履歴に基づいて算出した自車両の現在位置またはGPS信号を用いて算出した自車両の現在位置のいずれかを実際の自車両の現在位置として採用している。
【0031】
次に、本実施形態に係る車車間通信ECU1における処理手順について説明する。図2は、車車間通信ECUにおける処理手順を示すフローチャートである。図2に示すように、車車間通信ECU1においては、最初に、自車両VSが駐車場からの走行を開始したか否かを判断する(S1)。自車両VSが駐車場からの走行を開始したか否かについては、現在位置算出部15において、現在位置が駐車場であり、かつ走行速度が0から増加したか否かにより判断する。
【0032】
その結果、自車両VSが駐車場からの走行を開始していないと判断した場合には、ステップS1に戻って処理を繰り返す。一方、自車両VSが駐車場からの走行を開始したと判断した場合には、自車両VSが周囲を走行する他車両V1との間で車車間通信を開始したか否かを判断する(S2)。
【0033】
ここで、車車間通信を開始していないと判断した場合には、ステップS1に戻り、処理を繰り返す。一方、車車間通信を開始したと判断した場合には、退出出口推定部14は、車車間通信情報DB12から他車両位置情報を読み出して取得し(S3)、次に、駐車場地図DB13から退出出口情報および想定エリア情報を読み出して、通信想定エリアを取得する(S4)。
【0034】
続いて、退出出口推定部14において、通信想定エリア内の車両判定を行う(S5)。この車両判定では、自車両が退出したと推定される特定の出口の候補である出口候補を決定する。それから決定した出口候補に対応する通信想定エリア内における他車両位置情報を送信している他車両の数を計測する。
【0035】
その後、他車両の数を計測していない他の出口候補の有無を判断する(S6)。ここで、他の出口候補がある場合には、ステップS4に戻り、他の出口候補についての通信想定エリアを取得する。それから、取得した通信想定エリアにおける他車両の数を計測する。こうして、他車両の数の計測が済んでいない通信想定エリアがなくなるまで同様の作業を行う。
【0036】
また、他の出口候補がなくなり、すべての出口候補に対して通信想定エリアにおける他車両の数の計測が済んだら、自車両が退出した出口の推測を行う(S7)。自車両が退出した出口の推測では、複数の通信想定エリアにおける他車両の数を比較し、この比較結果から自車両の現在位置を推測する。たとえば、複数の通信想定エリアにおける他車両の数を比較した結果、他車両がもっとも多い通信想定エリアを算出し、この通信想定エリアに対応する出口から自車両が退出したと推測する。
【0037】
たとえば、図3に示すように、駐車場Pに第1出口E1および第2出口E2の2つの出口があり、第1出口E1は、第1道路R1に面しており、第2出口E2は第2道路R2に面しているとする。このとき、自車両VSが駐車場Pから退出する際、第1出口E1から退出した場合には、第1道路R1を通行することになる。
【0038】
自車両VSが第1道路R1を通行する場合、第1通信想定エリア41内における他車両V1と多くの車車間通信を行うと考えられる。一方、自車両VSが駐車場Pから退出する際、第2出口E2から退出した場合には、第2道路R2を通行することになる。自車両VSが第2道路R2を通行する場合、第2通信想定エリア42内における他車両V1と多くの車車間通信を行うと考えられる。
【0039】
そこで、ステップS7において、第1通信想定エリア41内における自車両と車車間通信を行う他車両の数と、第2通信想定エリア42内における自車両と車車間通信を行う他車両の数とを比較する。その結果、第1通信想定エリア41内における他車両の数が多いと判断した場合には、自車両VSが退出した退出出口を第1出口E1と判断する。一方、第2通信想定エリア42内における他車両の数が多いと判断した場合には、自車両VSが退出した退出出口を第2出口E2と判断する。
【0040】
こうして退出出口を判断したら、現在位置算出部15において、自車両VSの現在位置を算出する(S8)。現在位置を算出する際には、現在位置算出部15において、車両状態センサ3から送信された車両状態情報に基づいて、自車両VSの走行履歴を算出する。ここで算出した走行履歴と、退出出口推定部14で推定した退出出口情報に基づいて、車両の現在位置を算出する。こうして、車車間通信ECU1における処理を終了する。
【0041】
このように、本実施形態に係る車車間通信ECU1においては、駐車場Pから自車両VSが退出した退出出口を複数の退出出口の中から推定し、その推定結果に基づいて自車両位置を特定している。このため、自車両VSが退出した退出出口を誤って認識することを防止することができる。したがって駐車場Pから自車両VSが退出した場合に、退出出口を精度よく推定することができ、もって自車両位置を精度よく算出して特定することができる。
【0042】
また、退出出口から退出した際における自車両VSが走行する確率が高い通信想定エリアにおける他車両V1の数に基づいて、自車両VSの位置が含まれる通信想定エリアを推定し、その推定結果に基づいて自車両が退出した出口を推定している。このため、たとえば駐車場Pに自動領域収受システムが設けられていない場合等においても、自車両が退出した出口を精度よく特定することができる。
【0043】
以上、本発明の好適な実施形態について説明したが、本発明は上記の実施形態に限定されるものではない。たとえば、上記実施形態においては、退出出口を推定する際に、予め記憶された通信想定エリアを利用しているが、他の態様とすることもできる。たとえば、駐車場から退出した後に自車両が車車間通信を行っている他車両の位置をマップ化し、自車両が車車間通信を行っている他車両が存在する他車両存在領域を取得する。この他車両存在領域の時間変化を記憶しておき、他車両存在領域の時間変化に基づいて退出出口を推定する態様とすることもできる。
【0044】
具体的に、図4(a)に示すように、自車両VSが駐車場Pから退出する際、第1出口E1から退出した場合には、他車両存在エリア51内において他車両V1からの他車両情報が送信されたとする。しかし、この状態では、自車両VSが第1出口E1から退出したのではなく、第2出口E2から退出した可能性もある。
【0045】
そこで、他車両存在領域の経時変化を参照する。たとえば、t秒後には、図4(b)に示すように、次時間他車両通信エリア52が、図4(a)に示す他車両存在エリア51よりも第1道路R1に沿って長くなるように広がっていたとする。この場合には、自車両VSは、第1道路R1を走行していると考えられ、第1出口E1を退出したと推定することができる。
【0046】
このように、他車両存在領域の経時変化に基づいて、自車両VSの退出出口を推定することもできる。他車両存在領域の経時変化に基づいて自車両VSの退出出口を推定する際には、所定時間、たとえば1秒ごと他車両存在領域を比較し、その変化を参照することができる。
【0047】
また、上記実施形態においては、複数出口付領域として駐車場を例示しているが、駐車場以外の領域、たとえばインターチェンジなどとする態様とすることができる。さらに、上記実施形態においては、通信想定エリアを推定する際に、通信想定エリア内における他車両の数を単純に比較しているが、他の態様とすることもできる。たとえば、通信想定エリア内における交通量に対する他車両の数を比較する態様とすることができる。また、退出出口を推定するにあたり、他車両位置情報に付加されている精度情報を利用することもできる。たとえば、他車両位置の精度が高い他車両位置情報について、他車両位置の精度が低い他車両位置情報よりも優位に扱う態様とすることができる。
【符号の説明】
【0048】
1…車車間通信ECU、2…通信機、3…車両状態センサ、11…車車間通信情報処理部、12…車車間通信情報DB、13…駐車場地図DB、14…退出出口推定部、15…現在位置算出部、21…車車間通信報ECU、22…他車両側通信機、23…車両状態センサ、41…通信想定エリア、42…通信想定エリア、51…他車両存在エリア、52…次時間他車両通信エリア、E1…第1出口、E2…第2出口、P…駐車場、R1…第1道路、R2…第2道路、V1…他車両、VS…自車両。
【特許請求の範囲】
【請求項1】
自車両の現在位置である自車両位置を特定する自車両位置特定装置であって、
複数の出口が設けられた領域である複数出口付領域における前記自車両の走行開始を判断する走行開始判断手段と、
前記自車両の周囲における他車両が送信する前記他車両の位置を取得する他車両位置取得手段と、
前記他車両位置取得手段によって取得された他車両の位置に基づいて、前記自車両が退出した出口が、前記複数の出口のいずれであるかを推定する退出出口推定手段と、
前記退出出口推定手段による推定結果に基づいて、自車両位置を特定することを特徴とする自車両位置特定装置。
【請求項2】
前記複数の出口のそれぞれに対して、前記出口から退出した際における車両が走行する確率が高い領域である高確率走行路領域をそれぞれ取得する高確率走行路領域取得手段と、
前記高確率走行路領域における前記他車両の数を取得する走行車両数取得手段と、
前記高確率走行路領域における前記他車両の数に基づいて、前記自車両の位置が含まれる高確率走行路領域を判定する自車両走行領域判定手段と、をさらに備え、
前記退出出口推定手段は、前記自車両走行領域判定手段における判定結果に基づいて、前記自車両が退出した出口が、前記複数の出口のいずれであるかを推定する請求項1に記載の自車両位置特定装置。
【請求項3】
前記他車両位置取得手段で取得された他車両の存在領域を検出する他車両存在領域検出手段と、
前記他車両存在領域の時間変化を記憶する他車両存在領域時間変化記憶手段と、をさらに備え、
前記退出出口推定手段は、前記他車両存在領域の時間変化に基づいて、前記自車両が退出した出口が、前記複数の出口のいずれであるかを推定する請求項1に記載の自車両位置特定装置。
【請求項4】
前記自車両の走行履歴を取得する走行履歴取得手段をさらに備え、
前記退出出口推定手段による推定結果および走行履歴取得手段に取得された走行履歴に基づいて、前記自車両の位置を特定する請求項1〜請求項3のうちのいずれか1項に記載の自車両位置特定装置。
【請求項1】
自車両の現在位置である自車両位置を特定する自車両位置特定装置であって、
複数の出口が設けられた領域である複数出口付領域における前記自車両の走行開始を判断する走行開始判断手段と、
前記自車両の周囲における他車両が送信する前記他車両の位置を取得する他車両位置取得手段と、
前記他車両位置取得手段によって取得された他車両の位置に基づいて、前記自車両が退出した出口が、前記複数の出口のいずれであるかを推定する退出出口推定手段と、
前記退出出口推定手段による推定結果に基づいて、自車両位置を特定することを特徴とする自車両位置特定装置。
【請求項2】
前記複数の出口のそれぞれに対して、前記出口から退出した際における車両が走行する確率が高い領域である高確率走行路領域をそれぞれ取得する高確率走行路領域取得手段と、
前記高確率走行路領域における前記他車両の数を取得する走行車両数取得手段と、
前記高確率走行路領域における前記他車両の数に基づいて、前記自車両の位置が含まれる高確率走行路領域を判定する自車両走行領域判定手段と、をさらに備え、
前記退出出口推定手段は、前記自車両走行領域判定手段における判定結果に基づいて、前記自車両が退出した出口が、前記複数の出口のいずれであるかを推定する請求項1に記載の自車両位置特定装置。
【請求項3】
前記他車両位置取得手段で取得された他車両の存在領域を検出する他車両存在領域検出手段と、
前記他車両存在領域の時間変化を記憶する他車両存在領域時間変化記憶手段と、をさらに備え、
前記退出出口推定手段は、前記他車両存在領域の時間変化に基づいて、前記自車両が退出した出口が、前記複数の出口のいずれであるかを推定する請求項1に記載の自車両位置特定装置。
【請求項4】
前記自車両の走行履歴を取得する走行履歴取得手段をさらに備え、
前記退出出口推定手段による推定結果および走行履歴取得手段に取得された走行履歴に基づいて、前記自車両の位置を特定する請求項1〜請求項3のうちのいずれか1項に記載の自車両位置特定装置。
【図1】


【図2】
【図3】

【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−154792(P2012−154792A)
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願番号】特願2011−14164(P2011−14164)
【出願日】平成23年1月26日(2011.1.26)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000004260)株式会社デンソー (27,639)
【出願人】(000237592)富士通テン株式会社 (3,383)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願日】平成23年1月26日(2011.1.26)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000004260)株式会社デンソー (27,639)
【出願人】(000237592)富士通テン株式会社 (3,383)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]