
自車位置認識システム、自車位置認識プログラム、及び自車位置認識方法
【課題】車両の進行方位が道路の延在方位と異なる場合であっても推定自車位置を適切に補正することが可能な自車位置認識システム及び自車位置認識プログラムを実現する。
【解決手段】道路の延在方位EDに平行な方位を基準方位SDとして設けられた路面上の地物を対象地物Mとして、撮影画像に含まれる対象地物Mの画像認識処理を行う画像認識部と、画像認識部により認識された対象地物Mと自車両100との相対方位RDと、自車両100の進行方位MDとに基づき、対象地物Mの基準方位SDを特定する基準方位特定部と、推定自車位置EPの周辺の道路情報に基づき、基準方位特定部により特定された基準方位SDと延在方位EDが一致する道路上の位置である地物方位一致位置P0を検出し、当該地物方位一致位置P0に基づき推定自車位置EPを補正する地物利用自車位置補正部と、を備える。
【解決手段】道路の延在方位EDに平行な方位を基準方位SDとして設けられた路面上の地物を対象地物Mとして、撮影画像に含まれる対象地物Mの画像認識処理を行う画像認識部と、画像認識部により認識された対象地物Mと自車両100との相対方位RDと、自車両100の進行方位MDとに基づき、対象地物Mの基準方位SDを特定する基準方位特定部と、推定自車位置EPの周辺の道路情報に基づき、基準方位特定部により特定された基準方位SDと延在方位EDが一致する道路上の位置である地物方位一致位置P0を検出し、当該地物方位一致位置P0に基づき推定自車位置EPを補正する地物利用自車位置補正部と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自車両の推定位置である推定自車位置を取得する推定自車位置取得部と、自車両の進行方位を取得する進行方位取得部と、道路の延在方位に関する情報を含む道路情報を取得する道路情報取得部と、路面の撮影画像を取得する路面画像取得部と、を備えた自車位置認識システム、自車両の推定位置である推定自車位置を取得する推定自車位置取得機能と、自車両の進行方位を取得する進行方位取得機能と、道路の延在方位に関する情報を含む道路情報を取得する道路情報取得機能と、路面の撮影画像を取得する路面画像取得機能と、を実現させるための自車位置認識プログラム、及び、自車両の推定位置である推定自車位置を取得する推定自車位置取得ステップと、自車両の進行方位を取得する進行方位取得ステップと、道路の延在方位に関する情報を含む道路情報を取得する道路情報取得ステップと、路面の撮影画像を取得する路面画像取得ステップと、を備えた自車位置認識方法に関する。
【背景技術】
【0002】
自車両の位置を認識する自車位置認識システムは、例えば車両用のナビゲーション装置等に備えられる。下記の特許文献1には、マップマッチング処理を行うことで推定自車位置を補正し、自車の走行位置を地図データの道路上に合わせる機能を備えたナビゲーション装置が記載されている。ところで、特許文献1の段落0015、0016にも記載のように、車両の進行方位が道路(道路情報が備えるリンク)の延在方位と異なる場合には、マップマッチング処理を行うと却って自車位置がずれてしまう場合がある。そこで、特許文献1に記載の構成では、車両の進行方位が道路の延在方位と異なるものとなり得るような場合(例えば環状交差点に進入した場合)には、マップマッチング処理の実行を停止する構成としている。
【0003】
しかしながら、このようにマップマッチング処理の実行を停止した場合には、推定自車位置の補正が行えないため、自車両が、地図データの道路上から外れた位置や道路上であっても実際とは異なった位置に表示されるおそれがあり、経路案内等が適切に行われない可能性がある。そのため、上記特許文献1に記載の構成では、ナビゲーション装置の使用者の利便性が低下するおそれがある。
【0004】
また、下記の特許文献2には、車両が環状道路を走行中の場合における推定自車位置の補正に関する技術が記載されている。しかしながら、特許文献2には車両の進行方位が道路の延在方位と異なる場合があり得ることに言及した記載はなく、当然ながら、上記の利便性の問題を解決するための手段について何ら示されていない。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−132922号公報
【特許文献2】特開2006−292928号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
そこで、車両の進行方位が道路の延在方位と異なる場合であっても推定自車位置を適切に補正することが可能な自車位置認識システム及び自車位置認識プログラムの実現が望まれる。
【課題を解決するための手段】
【0007】
本発明に係る、自車両の推定位置である推定自車位置を取得する推定自車位置取得部と、自車両の進行方位を取得する進行方位取得部と、道路の延在方位に関する情報を含む道路情報を取得する道路情報取得部と、路面の撮影画像を取得する路面画像取得部と、を備えた自車位置認識システムの特徴構成は、道路の延在方位に平行な方位を基準方位として設けられた路面上の地物を対象地物として、前記撮影画像に含まれる前記対象地物の画像認識処理を行う画像認識部と、前記画像認識部により認識された前記対象地物と自車両との相対方位と、自車両の進行方位とに基づき、前記対象地物の前記基準方位を特定する基準方位特定部と、前記推定自車位置の周辺の前記道路情報に基づき、前記基準方位特定部により特定された前記基準方位と延在方位が一致する道路上の位置である地物方位一致位置を検出し、当該地物方位一致位置に基づき前記推定自車位置を補正する地物利用自車位置補正部と、を備えた点にある。
【0008】
なお、本願では、方位に関して「一致」とは、完全に一致する場合だけでなく、比較の対象となる2つの方位のそれぞれの導出方法(特定方法)に応じた範囲内で、当該2つの方位がずれている場合を含む概念として用いている。
【0009】
上記の特徴構成によれば、基準方位特定部により特定される対象地物の基準方位は、当該対象地物が設けられた地点における道路の延在方位と一致する。従って、車線変更等により自車両の進行方位が道路の延在方位とは異なるような場合であっても、対象地物の基準方位を特定することで車両が位置する付近での道路の延在方位を特定することができ、当該延在方位と地図情報とに基づき検出される地物方位一致位置に基づき、推定自車位置を適切に補正することができる。
【0010】
ここで、前記推定自車位置の周辺の前記道路情報に含まれる道路の延在方位と自車両の進行方位とに基づき前記推定自車位置を補正する通常自車位置補正部を更に備え、少なくとも前記推定自車位置が環状道路を有する交差点である環状交差点内にある場合に、前記地物利用自車位置補正部による前記推定自車位置の補正を行う構成とすると好適である。
【0011】
この構成によれば、自車両の進行方位が道路の延在方位と異なる可能性が他の道路に比べて高くなり得る環状交差点において、推定自車位置を適切に補正することができる。
【0012】
また、路面に直交する軸を中心とする180度未満の回転対称性を有さない形状の路面上の地物を前記対象地物とすると好適である。
【0013】
また、道路の延在方位に対して平行な直線成分、及び道路の延在方位に対して直交する直線成分の少なくとも何れかを有する形状の路面上の地物を前記対象地物としても好適である。
【0014】
これらの構成によれば、画像認識により対象地物の基準方位を検出することが比較的容易になるため、画像認識処理の演算負荷を低減することができるとともに、対象地物の基準方位をより正確に検出することが可能となる。
【0015】
また、前記地物利用自車位置補正部は、前記画像認識部により認識された前記対象地物と自車両との距離にも基づいて前記推定自車位置を補正する構成とすると好適である。
【0016】
この構成によれば、推定自車位置の補正処理に要する時間や、路面の撮影画像の撮影時における自車両と対象地物との距離が長いような場合であっても、推定自車位置を適切に補正することが可能となる。
【0017】
以上の各構成を備えた本発明に係る自車位置認識システムの技術的特徴は、自車位置認識プログラムや自車位置認識方法にも適用可能であり、そのため、本発明は、そのようなプログラムや方法も権利の対象とすることができる。
【0018】
その場合における、自車両の推定位置である推定自車位置を取得する推定自車位置取得機能と、自車両の進行方位を取得する進行方位取得機能と、道路の延在方位に関する情報を含む道路情報を取得する道路情報取得機能と、路面の撮影画像を取得する路面画像取得機能と、を実現させるための自車位置認識プログラムの特徴構成は、道路の延在方位に平行な方位を基準方位として設けられた路面上の地物を対象地物として、前記撮影画像に含まれる前記対象地物の画像認識処理を行う画像認識機能と、前記画像認識機能により認識された前記対象地物と自車両との相対方位と、自車両の進行方位とに基づき、前記対象地物の前記基準方位を特定する基準方位特定機能と、前記推定自車位置の周辺の前記道路情報に基づき、前記基準方位特定機能により特定された前記基準方位と延在方位が一致する道路上の位置である地物方位一致位置を検出し、当該地物方位一致位置に基づき前記推定自車位置を補正する地物利用自車位置補正機能と、をコンピュータに実現させる点にある。
【0019】
また、自車両の推定位置である推定自車位置を取得する推定自車位置取得ステップと、自車両の進行方位を取得する進行方位取得ステップと、道路の延在方位に関する情報を含む道路情報を取得する道路情報取得ステップと、路面の撮影画像を取得する路面画像取得ステップと、を備えた自車位置認識方法の特徴構成は、道路の延在方位に平行な方位を基準方位として設けられた路面上の地物を対象地物として、前記撮影画像に含まれる前記対象地物の画像認識処理を行う画像認識ステップと、前記画像認識ステップにて認識された前記対象地物と自車両との相対方位と、自車両の進行方位とに基づき、前記対象地物の前記基準方位を特定する基準方位特定ステップと、前記推定自車位置の周辺の前記道路情報に基づき、前記基準方位特定ステップにて特定された前記基準方位と延在方位が一致する道路上の位置である地物方位一致位置を検出する地物方位一致位置検出ステップと、前記地物方位一致位置検出ステップにて検出された前記地物方位一致位置に基づき前記推定自車位置を補正する地物利用自車位置補正ステップと、を備える点にある。
【0020】
当然ながら、これらの自車位置認識プログラムや自車位置認識方法も上述した自車位置認識システムに係る作用効果を得ることができ、更に、その好適な構成の例として挙げたいくつかの付加的技術を組み込むことが可能である。
【図面の簡単な説明】
【0021】
【図1】本発明の実施形態に係る自車位置認識システムの概念を示す模式図である。
【図2】本発明の実施形態に係るナビゲーション装置の概略構成を示す模式図である。
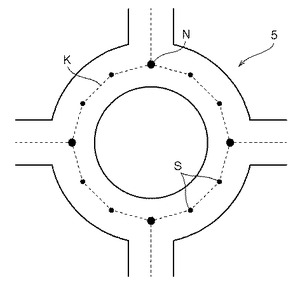
【図3】本発明の実施形態に係る環状交差点の例を示す模式図である。
【図4】本発明の実施形態に係る道路情報の例を示す模式図である。
【図5】本発明の実施形態に係る対象地物の例を示す模式図である。
【図6】本発明の実施形態に係る対象地物の例を示す模式図である。
【図7】本発明の実施形態に係る推定自車位置補正処理の手順を示すフローチャートである。
【図8】本発明の実施形態に係る地物利用自車位置補正処理の手順を示すフローチャートである。
【発明を実施するための形態】
【0022】
本発明の実施形態について図面に基づいて説明する。ここでは、本発明に係る自車位置認識システムを、車載用のナビゲーション装置に適用した場合を例として説明する。本実施形態に係るナビゲーション装置1は、自車位置認識ユニット3を備え(図2参照)、この自車位置認識ユニット3を中核として自車位置認識システムが構築されている。以下、本実施形態に係る自車位置認識システム(ナビゲーション装置1)の構成について、「自車位置認識システムの概略構成」、「ナビゲーション装置の概略構成」、「自車位置認識ユニットの構成」、「動作処理の手順」の順に詳細に説明する。
【0023】
1.自車位置認識システムの概略構成
まず、本実施形態に係る自車位置認識システムの概略構成について、図1を参照して説明する。なお、図1では、車両(以下、「自車両」という場合がある。)100が車線変更を行っている場面を想定している。車両100は、自車位置認識ユニット3を有するナビゲーション装置1(図2参照)を備えている。このナビゲーション装置1は、後述するように、自車両100の推定位置である推定自車位置EPを算出する機能を備えている。また、車両100にはカメラ16(図2参照)が備えられている。本例では、カメラ16は、車両100の後方の路面を撮影するバックカメラ(リアカメラ)とされている。
【0024】
自車位置認識ユニット3は、路面上の地物の方位に基づく推定自車位置EPの補正処理(地物利用自車位置補正処理)の機能が有効に設定されている場合に、カメラ16が撮影した路面の撮影画像を取得し、道路の延在方位EDに平行な方位を基準方位SDとして設けられた路面上の地物を対象地物として、当該撮影画像に含まれる対象地物の画像認識処理を行う(ステップ#01)。なお、本実施形態では、道路標示Mを対象地物としている。また、本実施形態では、推定自車位置EPが環状交差点5(図3に一例を示す)内にある場合に、地物利用自車位置補正処理の機能が有効に設定されるように構成されている。
【0025】
そして、道路標示Mの画像認識に成功した場合には、自車位置認識ユニット3は、画像認識により取得した道路標示Mと自車両100との相対方位RDと、自車両の進行方位MDとに基づき、道路標示Mの基準方位SDを特定する(ステップ#02)。ここで特定される道路標示Mの基準方位SDは、当該道路標示Mが設けられた地点における道路の延在方位EDと一致するため、基準方位SDを特定することで、車両100が位置する付近での道路(道路上における車両100が位置する部分)の延在方位EDを特定することができる。また、自車位置認識ユニット3は、道路標示Mの画像認識に成功した場合には、推定自車位置EPの周辺の道路情報(道路地図データ)RIを道路地図データベース12から取得する(ステップ#03)。
【0026】
自車位置認識ユニット3は、推定自車位置EPの周辺の道路情報RIに基づき、上記のようして特定された基準方位SDと延在方位EDが一致する道路上(道路地図データ上)の位置である地物方位一致位置P0を検出する(ステップ#04)。そして、自車位置認識ユニット3は、上記のようにして求められた地物方位一致位置P0に基づき、推定自車位置EPを補正する(ステップ#05)。本例では、自車位置認識ユニット3は、地物方位一致位置P0を推定自車位置EPと置き換えることで、推定自車位置EPの補正を行う。本発明では、上記のように推定自車位置EPの補正を行う構成とすることで、例えば車線変更等により自車両100の進行方位MDが道路の延在方位EDとは異なるような場合であっても、車両100が位置する付近での道路の延在方位EDを対象地物(本例では道路標示M)の方位に基づき特定することができ、当該延在方位EDに基づき推定自車位置EPを適切に補正することが可能となっている。
【0027】
一方、自車位置認識ユニット3は、地物利用自車位置補正処理を実行しない場合(本例では、推定自車位置EPが環状交差点5内にない場合)には、路面上の地物の方位に基づかない推定自車位置EPの補正処理(通常自車位置補正処理)を実行するように構成されている。
【0028】
2.ナビゲーション装置の概略構成
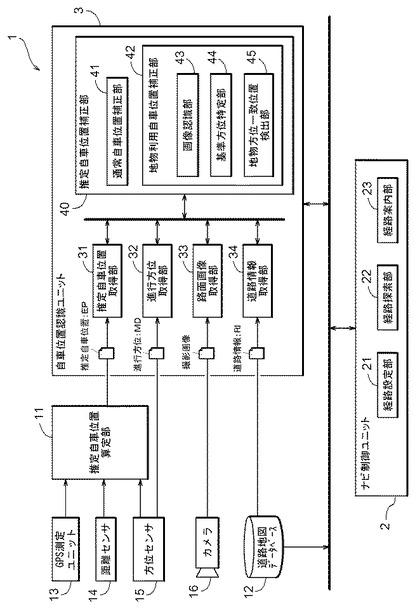
次に、上述した自車位置認識システムを実現するナビゲーション装置1の概略構成について、図2を参照して説明する。図2に示すように、ナビゲーション装置1は、ナビ制御ユニット2と、自車位置認識ユニット3と、推定自車位置算定部11と、道路地図データベース12と、を備えている。ナビ制御ユニット2及び自車位置認識ユニット3は、後述する複数の機能部を備えている。
【0029】
そして、ナビゲーション装置1が備える各機能部は、互いに共通の或いはそれぞれ独立のCPU等の演算処理装置を中核部材として、入力されたデータに対して種々の処理を行うための機能部がハードウェア又はソフトウェア(プログラム)或いはその両方により実装されて構成されている。また、これらの各機能部は、デジタル転送バス等の通信線を介して互いに情報の受け渡しを行うことができるように構成されているとともに、道路地図データベース12からデータ(道路情報RI)を抽出可能に構成されている。ここで、各機能部がソフトウェア(プログラム)により構成される場合には、当該ソフトウェアは、演算処理装置が参照可能なRAMやROM等の記憶手段に記憶される。
【0030】
また、道路地図データベース12は、記憶装置により構成される。この記憶装置は、例えば、ハードディスクドライブ、フラッシュメモリ等のように、情報を記憶及び書き換え可能な記録媒体をハードウェア構成として備える。
【0031】
ナビ制御ユニット2は、経路設定部21、経路探索部22、及び経路案内部23を備えている。経路設定部21は、例えば自車位置等の出発地、入力された目的地、通過地点や走行条件(高速道路の使用有無など)を設定する機能部である。経路探索部22は、経路設定部21によって設定された条件に基づき出発地から目的地までの案内経路を探索するための演算処理(経路探索処理)を行う機能部である。経路案内部23は、経路探索部22により探索された出発地から目的地までの経路に従って、モニタ(図示せず)の表示画面による案内表示やスピーカ(図示せず)による音声案内等により、運転者に対して適切な経路案内を行うための演算処理(経路案内処理)を行う機能部である。
【0032】
道路地図データベース12は、上記の経路探索処理や経路案内処理を実行する際や、モニタへの地図表示処理を実行する際等に参照される道路情報(道路地図データ)RIを格納している。道路情報RIは、道路の延在方位EDに関する情報を含み、本例では、図4に一例を示すように、ノードN及びリンクKにより道路を表現する情報とされている。ノードNは、例えば道路の交差点、折曲点、分岐点等に設定される。なお、図4は、図3に一例を示す環状交差点5に対応する道路情報RIを概念的に表したものである。
【0033】
補足説明すると、道路情報RIは、緯度及び経度で表現された地図上の位置情報を有する多数のノードNの情報と、2つのノードNを連結して道路に対応する経路を構成する多数のリンクKの情報とを有して構成されている。すなわち、本例では、リンクKの情報が、道路の延在方位EDに関する情報を表す。道路情報RIは、各リンクKのリンク情報(リンク属性)として、道路の種別(高速道路、有料道路、国道、県道等の種別)やリンク長さ等の情報を有している。本実施形態では、リンク情報には、当該リンクKが環状交差点5を形成する環状交差点リンクであるか否かの情報も含まれている。道路情報RIは、さらに、2つのノードNの間(リンクK上)に配置されてリンクKの詳細形状を表す形状補間点Sの情報や道路幅の情報を有している。
【0034】
なお、上記のような道路情報RIは、データベース化され、道路地図データベース12の仕様に応じた形態で格納されている。例えば、道路情報RIが、互いに関連付けられた複数のレイヤに分かれて道路地図データベース12に格納された構成とすることができる。具体的には、ノードNとリンクKにより道路間の接続情報を示すレイヤ(道路ネットワークレイヤ)、形状補間点Sや道路幅の情報を示すレイヤ(道路形状レイヤ)、及び、道路に関する詳細な情報(道路上や道路周辺に設けられた各種地物の情報等)を示すレイヤ(道路属性レイヤ)を含む少なくとも3つのレイヤに分かれて道路情報RIが備えられた構成とすることができる。
【0035】
推定自車位置算定部11は、車両100に備えられたGPS測定ユニット13、距離センサ14、及び方位センサ15の出力に基づき、自車両100の推定位置である推定自車位置EPを算定する機能部である。GPS測定ユニット13は、GPS衛星からのGPS信号を受信し、当該GPS信号を推定自車位置算定部11へ出力する。また、距離センサ14は、車両100の車速や移動距離を検出し、検出結果としての車速及び移動距離の情報を推定自車位置算定部11へ出力する。方位センサ15は、例えば、ジャイロセンサ、地磁気センサ(電子コンパス)等により構成され、その検出結果としての方位の情報を推定自車位置算定部11へ出力する。
【0036】
推定自車位置算定部11は、GPS信号を解析し、車両100の現在位置(緯度及び経度)を算定し、GPS位置データを得る。また、推定自車位置算定部11は、刻々と送られてくる移動距離情報と方位情報とに基づいて推測航法位置を演算し、推測航法位置データを得る。そして、推定自車位置算定部11は、GPS位置データと推測航法位置データとから公知の方法により車両100の推定位置である推定自車位置EPを算定する演算を行う。なお、推定自車位置算定部11が、GPS位置データ及び推測航法位置データの何れか一方のみを用いて推定自車位置EPを算定する構成とすることも可能である。
【0037】
自車位置認識ユニット3は、詳細は後述するが、推定自車位置算定部11が算定した推定自車位置EPを補正するための推定自車位置補正部40を備えている。本実施形態に係るナビゲーション装置1は、この自車位置認識ユニット3を備えることで、測定誤差が含まれ得る推定自車位置EPを適切に補正し、推定自車位置EPが道路上から外れるような場合でも、自車位置を道路地図に示される道路上に適切に補正(マップマッチング)することが可能となっている。
【0038】
3.自車位置認識ユニットの構成
次に、本発明の要部である自車位置認識ユニット3の構成について説明する。図2に示すように、自車位置認識ユニット3は、推定自車位置取得部31、進行方位取得部32、路面画像取得部33、道路情報取得部34、及び推定自車位置補正部40を備えている。
【0039】
3−1.推定自車位置取得部の構成
推定自車位置取得部31は、自車両100の推定位置である推定自車位置EPを取得する機能部である。本実施形態では、推定自車位置算定部11が算定した推定自車位置EPが推定自車位置取得部31に入力されることで、推定自車位置取得部31が推定自車位置EPを取得するように構成されている。
【0040】
なお、推定自車位置取得部31に推定自車位置EPの導出過程の情報が入力され、推定自車位置取得部31が当該情報に基づき推定自車位置EPを導出し、推定自車位置EPを取得する構成とすることもできる。例えば、推定自車位置取得部31に、GPS位置データと推測航法位置データとが入力される構成とすることができる。また、推定自車位置取得部31に、GPS測定ユニット13、距離センサ14、方位センサ15の検出結果が入力される構成とすることもできる。
【0041】
3−2.進行方位取得部の構成
進行方位取得部32は、自車両100の進行方位MDを取得する機能部である。具体的には、進行方位取得部32は、絶対方位での自車両100の進行方位MDを取得する。本例では、方位センサ15は絶対方位を検出可能な地磁気センサ(電子コンパス)とされ、方位センサ15の検出結果(絶対角度)が進行方位取得部32に入力されるように構成されている。そして、進行方位取得部32は、方位センサ15から入力された検出結果を自車両100の進行方位MDとすることで、進行方位MDを取得する。なお、「絶対方位」とは、絶対座標系(例えば地理座標系)での予め定められた方位(例えば地磁気の方向)を基準として一意に定まる方位を意味する。上述したように、本実施形態では、道路情報RIは、緯度及び経度で表現されたノードNの情報を含む。よって、本実施形態では、道路情報RIに含まれる道路の延在方位EDに関する情報は、絶対方位での延在方位EDに関する情報とされている。
【0042】
なお、方位センサ15が相対角度を検出するジャイロセンサとされる場合には、進行方位取得部32が方位センサ15の検出結果(相対角度)と以前の進行方位MDとに基づき、現在の進行方位MDを導出して取得する構成とすることができる。また、方位センサ15が相対角度を検出するジャイロセンサとされる場合に、推定自車位置算定部11が方位センサ15の検出結果と以前の進行方位MDとに基づき現在の進行方位MDを導出し、当該導出された進行方位MDを進行方位取得部32が取得する構成とすることもできる。
【0043】
3−3.路面画像取得部の構成
路面画像取得部33は、路面の撮影画像を取得する機能部である。上記のように車両100には路面を撮影するためのカメラ16が備えられており、路面画像取得部33は、カメラ16により撮影された路面の撮影画像を取得する。本例ではカメラ16はバックカメラとされており、路面画像取得部33は車両100の後方の路面の撮影画像を取得する。
【0044】
路面画像取得部33が取得した撮影画像は、後述する地物利用自車位置補正部42による地物利用自車位置補正処理に用いられる。よって、本実施形態では、路面画像取得部33は、地物利用自車位置補正処理の機能が有効に設定されている場合に、所定のタイミングで路面の撮影画像を取得する。この所定のタイミングは、例えば、所定の時間間隔毎(例えば1秒毎等)に設定したり、車両100が所定の距離(例えば1メートル等)を進む毎に設定したりすることができる。そして、路面画像取得部33が取得した撮影画像は、地物利用自車位置補正部42が備える画像認識部43へ出力される。
【0045】
3−4.道路情報取得部の構成
道路情報取得部34は、道路の延在方位EDに関する情報を含む道路情報RIを取得する機能部である。上記のように、本実施形態では道路情報RIを記憶した道路地図データベース12がナビゲーション装置1に備えられており、道路情報取得部34は、道路情報RIを道路地図データベース12から抽出して取得する。
【0046】
道路情報取得部34が取得した道路情報RIは、後述する推定自車位置補正部40(通常自車位置補正部41及び地物利用自車位置補正部42)による推定自車位置補正処理に用いられる。よって、本実施形態では、道路情報取得部34は、通常自車位置補正部41や地物利用自車位置補正部42からの要求に応じて、道路地図データベース12から道路情報RIを取得する。
【0047】
3−5.推定自車位置補正部の構成
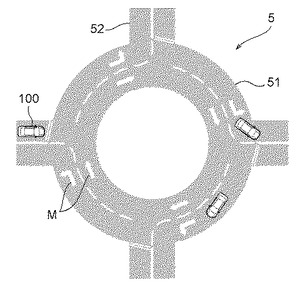
推定自車位置補正部40は、推定自車位置取得部31が取得した推定自車位置EPを補正する機能部、すなわち、推定自車位置補正処理を実行する機能部である。推定自車位置補正部40は、通常自車位置補正部41と地物利用自車位置補正部42とを備えている。そして、本実施形態では、推定自車位置補正部40は、推定自車位置EPが環状道路(周回道路)51を有する交差点である環状交差点5(図3参照)内にある場合に、地物利用自車位置補正処理の機能を有効に設定し、地物利用自車位置補正部42による推定自車位置EPの補正を行う。また、推定自車位置補正部40は、推定自車位置EPが環状交差点5内にない場合には、通常自車位置補正処理の機能を有効に設定し、通常自車位置補正部41による推定自車位置EPの補正を行う。
【0048】
なお、本実施形態では、上記のように、リンク情報(リンク属性)には、当該リンクKが環状交差点リンクであるか否かの情報が含まれている。そのため、推定自車位置補正部40は、当該リンク情報に基づき、推定自車位置EPが環状交差点5内にあるか否かを判定する。具体的には、推定自車位置EPが環状交差点リンク或いは当該環状交差点リンクの近傍の座標範囲内に進入している場合に、推定自車位置EPが環状交差点5内にあると判定する構成とすることができる。なお、環状交差点5が備える環状道路51を含む座標範囲を環状交差点5毎に予め定めておき、推定自車位置EPが当該座標範囲内にある場合に、推定自車位置EPが環状交差点5内にあると判定する構成とすることもできる。
【0049】
3−5−1.通常自車位置補正部の構成
通常自車位置補正部41は、推定自車位置EPの周辺の道路情報RIに含まれる道路の延在方位EDと自車両100の進行方位MDとに基づき推定自車位置EPを補正する機能部、すなわち、通常自車位置補正処理を実行する機能部である。この際、通常自車位置補正部41は、推定自車位置取得部31が取得した推定自車位置EPの情報を取得するととともに、道路情報取得部34が取得した当該推定自車位置EPの周辺の道路情報RIを取得する。
【0050】
本実施形態では、通常自車位置補正部41は、路面上の地物の方位に基づかない推定自車位置EPの補正処理(通常自車位置補正処理)を実行する。このような通常自車位置補正処理としては、マップマッチング(自車位置を道路地図に示される道路上に合わせるための補正)を行うための公知の手法(マップマッチング法)を採用することができる。詳細な説明は省略するが、例えば、上記特許文献1の段落0009〜0013に記載のパターンマッチング法や投影法を採用して、通常自車位置補正部41による推定自車位置EPの補正を行う構成とすることができる。
【0051】
なお、通常自車位置補正部41が通常自車位置補正処理を実行する際に必要となる道路情報RIの範囲はマップマッチングの手法により異なり、通常自車位置補正部41は、採用するマップマッチング法を実行するために必要な範囲の道路情報RIを道路情報取得部34を介して道路地図データベース12から取得する。
【0052】
通常自車位置補正部41による推定自車位置EPの補正は、通常自車位置補正処理の機能が有効に設定されている場合(本例では、推定自車位置EPが環状交差点5内にない場合)に、所定のタイミングで実行される。この所定のタイミングは、所定の時間間隔毎(例えば1秒、2秒、5秒毎等)に設定したり、車両100が所定の距離(例えば1メートル、2メートル、5メートル等)を進む毎に設定したりすることができる。また、所定のタイミングを、推定自車位置EPが新たなリンクK或いは当該新たなリンクK近傍の座標範囲内に進入する毎に設定したり、推定自車位置EPと道路地図に示される道路とのズレが所定の閾値を超える毎に設定したりすることもできる。
【0053】
3−5−2.地物利用自車位置補正部の構成
地物利用自車位置補正部42は、推定自車位置EPの周辺の道路情報RIに含まれる道路の延在方位EDと路面上の地物の基準方位SDとに基づき推定自車位置EPを補正する機能部、すなわち、地物利用自車位置補正処理を実行する機能部である。地物利用自車位置補正部42は、図2に示すように、画像認識部43と、基準方位特定部44と、地物方位一致位置検出部45とを備えている。そして、地物利用自車位置補正部42は、地物方位一致位置検出部45が検出した地物方位一致位置P0に基づき推定自車位置EPを補正するように構成されている。
【0054】
3−5−2−1.画像認識部の構成
画像認識部43は、道路の延在方位EDに平行な方位を基準方位SDとして設けられた路面上の地物を対象地物として、撮影画像に含まれる対象地物の画像認識処理を行う機能部である。具体的には、画像認識部43は、路面画像取得部33が取得した路面の撮影画像を用い、当該撮影画像に対して二値化処理やエッジ検出処理等を行うことで、当該撮影画像に含まれている地物の輪郭情報を抽出する。その後、画像認識部43は、抽出された地物の輪郭情報と、対象地物の形態の特徴量とのパターンマッチングを行い、対象地物の形態と一致する輪郭情報の抽出処理を行う。そして、対象地物の形態と一致する輪郭情報が抽出された場合には、当該輪郭情報を対象地物として認識し、対象地物の画像認識に成功したと判定する。本実施形態では、このような画像認識部43による道路標示Mの認識処理は、路面画像取得部33から新たな撮影画像を取得する度に実行される。
【0055】
そして、画像認識部43は、対象地物の画像認識に成功した場合には、当該認識された対象地物と自車両100との相対方位RDを導出する。すなわち、画像認識部43は、自車両100の進行方位MDを基準とする対象地物の相対的な(相対方位での)基準方位SDを導出する。ここで、撮影画像中における自車両100の方位(すなわち進行方位MD)は、車両100の進行方位MDによらず撮影画像中において一定の方向(図1に示す例では上下方向)となる。また、撮影画像中における対象地物の基準方位SDは、対象地物として認識された輪郭情報から取得することができる。よって、対象地物の画像認識に成功した場合には、図1に概念的に示すように、撮影画像中における自車両100の方位(進行方位MD)を表す線分と対象地物の基準方位SDを表す線分とが成す角度に基づき、相対方位RDを導出することができる。なお、詳細な説明は省略するが、カメラ16は路面よりも高い位置に設置されるため、相対方位RDの導出時には、路面に対する撮影角度も考慮される。そして、導出された相対方位RDは、基準方位特定部44へ出力される。
【0056】
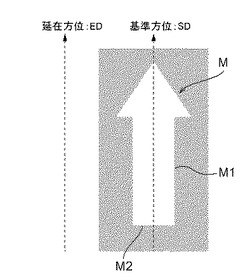
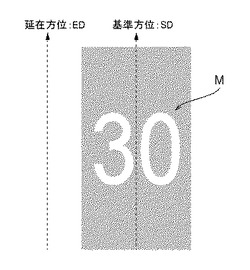
上述したように、本実施形態では、道路の延在方位EDに平行な方位を基準方位SDとして設けられた道路標示Mを対象地物としている。ここで、「道路標示M」とは、ペイント等により路面に設けられた規制や指示のための記号や文字である。例えば、進行方向等を表す矢印状の標示(矢印標示、図5参照)、速度(例えば最高速度)等の文字を表す文字標示(図6参照)、横断歩道であることを示す標示(図示せず)、区画線(中央線や車線境界線(レーンマーク)等)を表す標示(図示せず)等が、道路標示Mに含まれる。
【0057】
そして、路面上に設けられた地物(本例では道路標示M)は、道路に対する向きが予め定められているため、画像認識により得られた輪郭情報が表す形状と向きとから、基準方位SDを導出することができる。なお、図5に示すような直線状の矢印標示では、矢印の指す方向が一般的に基準方位SDとされる。また、図6に示すような文字標示では、文字の下から上へ向かう向きが一般的に基準方位SDとされる。
【0058】
本発明で対象とする対象地物にはあらゆる形状のものが含まれるが、画像認識により対象地物の基準方位SDを検出することが容易な形状の地物を対象地物とするのが好ましい。具体的には、路面に直交する軸を中心とする180度未満の回転対称性を有さない形状の路面上の地物を対象地物とすると好適である。例えば、図5及び図6に示すように、路面に直交する軸(紙面に直交する軸)を中心とする回転対称性を有さない形状の地物や、図示は省略するが、路面に直交する軸を中心とする180度の回転対称性を有する形状(例えば、I字状)の地物を対象地物とすることができる。
【0059】
また、道路の延在方位EDに対して平行な直線成分M1、及び道路の延在方位EDに対して直交する直線成分M2の少なくとも何れかを有する形状の路面上の地物を対象地物としても好適である。図5に例示する地物は、道路の延在方位EDに対して平行な直線成分M1、及び道路の延在方位EDに対して直交する直線成分M2の双方を有する形状を備えている。このような構成でも、画像認識により対象地物の基準方位SDを検出することが容易となる。
【0060】
なお、図5に示す例では、形状に関する上述した双方の要件を満たす形状、すなわち、路面に直交する軸を中心とする180度未満の回転対称性を有さない形状であって、更に、道路の延在方位EDに対して平行な直線成分M1、及び道路の延在方位EDに対して直交する直線成分M2の少なくとも何れかを有する形状となっている。一方、図6に示す例では、形状に関する上述した双方の要件の一方のみを満たす形状、すなわち、路面に直交する軸を中心とする180度未満の回転対称性を有さない形状ではあるが、道路の延在方位EDに対して平行な直線成分M1や、道路の延在方位EDに対して直交する直線成分M2を有意には備えない形状となっている。なお、図示は省略するが、形状に関する上述した双方の要件の他方のみを満たす形状、すなわち、路面に直交する軸を中心とする180度未満(例えば90度や45度)の回転対称性を有する形状ではあるが、道路の延在方位EDに対して平行な直線成分M1、及び道路の延在方位EDに対して直交する直線成分M2の少なくとも何れかを有する形状の地物を対象地物とすることもできる。
【0061】
ところで、本発明では、対象地物の情報(種別や配設位置等)が道路地図データベース12に備えられている必要性は必ずしもないが、道路地図データベース12に対象地物の情報が備えられている場合には、画像認識部43による対象地物の画像認識処理を実行する際に、当該対象地物の情報を参照する構成とすることができる。このような構成とした場合には、対象地物の画像認識及び相対方位RDの導出をより容易に行うことが可能となり、画像認識部43の構成の簡素化を図ることができる。
【0062】
3−5−2−2.基準方位特定部の構成
基準方位特定部44は、画像認識部43により認識された対象地物と自車両100との相対方位RD(すなわち、自車両の進行方位MDを基準とする相対方位での基準方位SD)と、自車両100の進行方位MDとに基づき、画像認識部43により認識された対象地物の基準方位SDを特定する機能部である。上記のように、基準方位特定部44には、画像認識部43が対象地物(本例では道路標示M)の画像認識に成功した場合に、当該対象地物の相対方位RDに関する情報が入力される。
【0063】
基準方位特定部44は、対象地物の相対方位RDを取得した場合には、車両100の進行方位MDを進行方位取得部32から取得する。本実施形態では、基準方位特定部44は、対象地物を含む撮影画像の撮影時又は路面画像取得部33による当該撮影画像の取得時における車両100の進行方位MDを取得する。そして、基準方位特定部44は、相対方位RDの符号(方向)を考慮して進行方位MDと相対方位RDとを加算或いは減算することで、対象地物の基準方位SDを特定する。すなわち、ここで特定される基準方位SDは、進行方位MDと同じ座標系での方位となる。そして、特定された基準方位SDは、地物方位一致位置検出部45へ出力される。なお、上述したように、進行方位取得部32が取得する車両100の進行方位MDは、絶対方位での進行方位MDであるため、基準方位特定部44にて特定される対象地物の基準方位SDも、絶対方位での基準方位SDとなる。すなわち、基準方位特定部44は、進行方位MDを基準とする相対方位での基準方位SDを、絶対方位での基準方位SDに変換する。これにより、基準方位SDを、同じく絶対方位で表された道路情報RIから得られる道路の延在方位EDと比較することが可能となる。
【0064】
ところで、基準方位SDは、対象地物が設けられた地点における道路の延在方位EDと一致する。すなわち、本発明によれば、例えば車線変更等により自車両100の進行方位MDが道路の延在方位EDとは異なるような場合であっても、対象地物(本例では道路標示M)の基準方位SDを特定することで、車両100が位置する付近での道路の延在方位EDを特定することが可能となっている。
【0065】
3−5−2−3.地物方位一致位置検出部の構成
地物方位一致位置検出部45は、推定自車位置EPの周辺の道路情報RIに基づき、基準方位SDと延在方位EDが一致する道路上の位置である地物方位一致位置P0を検出する機能部である。上記のように、地物方位一致位置検出部45には、基準方位特定部44が特定した基準方位SDの情報が入力される。そして、地物方位一致位置検出部45は、基準方位SDを取得すると、当該基準方位SDと推定自車位置EPの周辺の道路情報RIとに基づき、地物方位一致位置P0を導出する。なお、これまでに述べたように、この基準方位SDは、当該対象地物が設けられた地点における道路の延在方位EDと一致する。
【0066】
具体的には、地物方位一致位置検出部45は、基準方位特定部44より基準方位SDが入力されると、推定自車位置取得部31が取得した推定自車位置EPの周辺の道路情報RIを、道路情報取得部34を介して道路地図データベース12から取得する。本実施形態では、地物方位一致位置検出部45は、対象地物を含む撮影画像の撮影時又は路面画像取得部33による当該撮影画像の取得時における推定自車位置EPの周辺の道路情報RIを取得する。なお、取得する道路情報RIの範囲は、例えば、推定自車位置EPに含まれ得る誤差の最大値に基づき設定することができる。具体的には、取得する道路情報RIの範囲を、推定自車位置EPを中心とし、半径が上記誤差の最大値に一致する円形状領域の内側とすることができる。
【0067】
また、本実施形態では、上記のように、推定自車位置EPが環状道路51を有する交差点である環状交差点5内にある場合に、地物利用自車位置補正部42による推定自車位置EPの補正を行うように構成されている。よって、取得する道路情報RIの範囲を、環状交差点5を構成する環状道路51の全体や一部を含む範囲とすることもできる。この場合の「一部」としては、例えば、自車位置を中心として両側に均等な長さ(距離)の道路が含まれるような環状道路51の部分(例えば、半円弧状の部分)とすることができる。
【0068】
地物方位一致位置検出部45は、取得した道路情報RIに含まれる道路の延在方位EDを特定する。本実施形態では、上記のように、道路情報RIは、各道路に対応するリンクK(図4参照)の情報を有しており、地物方位一致位置検出部45は、当該リンクKの方位に基づき道路の延在方位EDを特定する。そして、地物方位一致位置検出部45は、基準方位SDと延在方位EDが一致する道路上(道路地図データ上)の位置を検出して、当該位置を地物方位一致位置P0とする。なお、地物方位一致位置検出部45が基準方位SDと延在方位EDが一致する道路上(道路地図データ上)の位置を検出できなかった場合には、今回の撮影画像に基づく推定自車位置EPの補正は行われない。
【0069】
なお、リンクKが表す道路が一方通行の道路(例えば、図3に示す環状道路51)である場合には、リンク情報(リンク属性)に道路の進行方向に関する情報が含まれる場合がある。このような場合、地物方位一致位置検出部45が、取得した道路情報RIに含まれる道路の延在方位EDをベクトルで取得し、方向も考慮して基準方位SDと延在方位EDが一致する道路上(道路地図データ上)の位置を検出する構成とすると好適である。
【0070】
ところで、本実施形態では、図4に示すように、リンクKの形状が、道路の延在方位EDに沿って隣接する2つのノードNや形状補間点Sの間を直線的に連結するものとされている。そのため、図3に示す環状道路51のように道路の延在方位EDが連続的に変化する場合でも、図4に示すようにリンクKの形状は段階的に変化する。このような場合、地物方位一致位置検出部45が道路情報RIから取得する道路の延在方位EDも、段階的に変化するものとなる。
【0071】
上記のような道路の延在方位EDの導出方法に鑑みて、本実施形態では、地物方位一致位置検出部45は、地物方位一致位置P0を検出する際に、基準方位SDと道路の延在方位EDとが完全に一致しない場合であっても、当該2つの方位の間のずれが所定の範囲内である場合には、基準方位SDと道路の延在方位EDとが一致すると判定するように構成されている。なお、基準方位SDとのずれが所定の範囲内の延在方位EDを有する道路上の位置(地点)が複数ある場合には、当該ずれが最も小さい位置(地点)を選択する構成とすることができる。この際、推定自車位置EPとの間の距離も考慮し、当該距離が短いものの優先度を高くすることもできる。
【0072】
ところで、上記のようにして求められる地物方位一致位置P0は、道路の延在方位EDに沿って隣接する2つのノードNや形状補間点Sの間を連結する直線(すなわちリンクKの全部或いは一部)上の位置まで特定されたものではない。地物方位一致位置P0をさらに特定する場合には、当該直線(線分)の中点を地物方位一致位置P0とすることができる。また、前回求めた推定自車位置EPからリンクKに沿って、前回推定自車位置EPを求めた時点から現在までの車両100の移動距離だけ移動させた位置が当該直線上にある場合には、当該位置を地物方位一致位置P0とすることができる。或いは、基準方位SDと道路の延在方位EDとの一致度に応じて、完全に一致する場合に当該直線の中点を地物方位一致位置P0とし、ずれがある場合には、一致度の低下度合に応じて当該直線の中点から当該直線の端に向かって移動させた地点を地物方位一致位置P0とする構成とすることもできる。
【0073】
なお、道路情報RIに道路の曲率に関する情報が含まれている場合には、道路の延在方位EDに沿って隣接する2つのノードNや形状補間点Sの間を結ぶ曲線を当該曲率に基づき想定し、当該曲線の接線方向を道路の延在方位EDとすることで、道路情報RIから取得する道路の延在方位EDを連続的に変化するものとすることができる。道路の曲率に関する情報としては、対象の道路が環状交差点5である場合には、当該環状交差点5の径に関する情報とすることができる。そして、このような場合には、方位のずれに関する上記所定の範囲を小さくすることができ、例えば、上記所定の範囲を一点として、基準方位SDと道路の延在方位EDとが完全に一致する場合に、基準方位SDと道路の延在方位EDとが一致すると判定するように構成することもできる。
【0074】
具体的には、例えば、対象の道路が一定の曲率で湾曲する道路である場合に、道路情報RIが当該対象の道路についての曲率半径及び曲率中心(湾曲に沿う仮想円の中心)の情報を備えていれば、これらの曲率半径及び曲率中心から定まる曲線(円弧)の接線方向を道路の延在方位EDとすることができる。また、例えば、対象の道路が一定の曲率で湾曲する道路である場合に、道路情報RIが当該対象の道路についての曲率及び距離(道路の長さ)の情報を備えていれば、これらの曲率及び距離から定まる曲線(円弧)の接線方向を道路の延在方位EDとすることができる。なお、このような場合には、道路情報RIが少なくとも対象の道路について、ノードNやリンクKに関する情報を備えない構成とすることも可能である。
【0075】
そして、地物方位一致位置検出部45が検出した地物方位一致位置P0に基づき、地物利用自車位置補正部42は、推定自車位置取得部31が取得した推定自車位置EPを補正する。本実施形態では、地物方位一致位置検出部45は、地物方位一致位置P0を推定自車位置EPと置き換えることで、推定自車位置EPの補正を行う。これにより、例えば車線変更等により自車両100の進行方位MDが道路の延在方位EDとは異なるような場合であっても、対象地物(本例では道路標示M)の基準方位SDを特定することで車両100が位置する付近での道路の延在方位EDを特定して、当該延在方位EDに基づき推定自車位置EPを適切に補正することが可能となっている。
【0076】
なお、図3に示す例では、環状交差点5が備える環状道路51は円形となっているが、環状道路51には円形以外のもの(楕円形等)も含まれる。また、環状道路51は、全体として環状に形成されているあらゆる形状の道路を含み、例えば多角形状に形成された道路も環状道路51に含まれる。また、図3に示す例では、環状道路51は一方通行の道路であるが、環状道路51が対面通行が可能な道路であっても良い。
【0077】
4.動作処理の手順
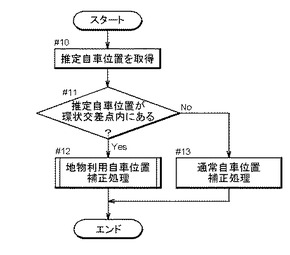
次に、図7、図8を参照して、本実施形態に係る自車位置認識ユニット3において実行される推定自車位置補正処理(自車位置認識処理)の手順、すなわち推定自車位置補正方法(自車位置認識方法)について説明する。以下に説明する推定自車位置補正処理の手順は、上記のナビゲーション装置1(自車位置認識ユニット3)の各機能部を構成するハードウェア又はソフトウェア(プログラム)或いはその両方により実行される。上記の各機能部がプログラムにより構成される場合には、ナビゲーション装置1が有する演算処理装置が、上記の各機能部を構成するプログラムを実行するコンピュータとして動作する。なお、図8は、図7のステップ#12の地物利用自車位置補正処理の手順を示すフローチャートである。
【0078】
4−1.推定自車位置補正処理の全体の手順
図7に示すように、推定自車位置取得部31が推定自車位置EPを取得すると(ステップ#10)、当該推定自車位置EPが環状交差点5内にあるか否かが判定される(ステップ#11)。そして、推定自車位置EPが環状交差点5内にある場合には(ステップ#11:Yes)、地物利用自車位置補正部42による地物利用自車位置補正処理が実行される(ステップ#12)。なお、地物利用自車位置補正処理については、後に図8のフローチャートに基づいて詳細に説明する。
【0079】
一方、推定自車位置EPが環状交差点5内にない場合には(ステップ#11:No)、通常自車位置補正部41による通常自車位置補正処理が実行される(ステップ#13)。この通常自車位置補正処理では、道路情報取得部34が取得した推定自車位置EPの周辺の道路情報RIに含まれる道路の延在方位EDと自車両100の進行方位MDとに基づき、公知のマップマッチング法に基づき推定自車位置EPの補正が行われる。
【0080】
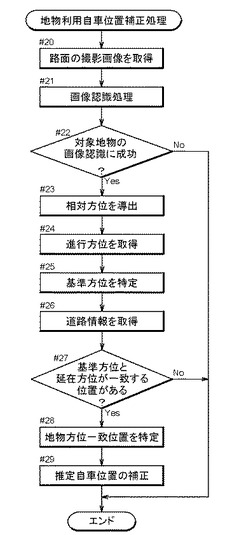
4−2.地物利用自車位置補正処理の手順
次に、図8を参照して地物利用自車位置補正処理の手順について説明する。地物利用自車位置補正処理では、まず初めに、路面画像取得部33により路面の撮影画像が取得される(ステップ#20)。そして、この取得された撮影画像に対して、画像認識部43が対象地物(本例では道路標示M)の画像認識処理を行う(ステップ#21)。この画像認識処理の結果、対象地物の画像認識に成功しなかった場合には(ステップ#22:No)、処理は終了する。
【0081】
一方、対象地物の画像認識に成功した場合には(ステップ#22:Yes)、画像認識部43は、認識された当該対象地物と自車両100との相対方位RDを導出する(ステップ#23)。次に、進行方位取得部32が車両100の進行方位MDを取得する(ステップ#24)。そして、基準方位特定部44は、画像認識部43が導出した相対方位RDと、進行方位取得部32が取得した車両100の進行方位MDとに基づき、画像認識部43により認識された対象地物の基準方位SDを特定する(ステップ#25)。
【0082】
基準方位SDが特定されると、地物方位一致位置検出部45は、推定自車位置EPの周辺の道路情報RIを道路情報取得部34を介して道路地図データベース12から取得する(ステップ#26)。そして、地物方位一致位置検出部45は、基準方位SDと延在方位EDが一致する位置が、取得した道路情報RIに含まれる道路上にあるか否かを判定する(ステップ#27)。そして、基準方位SDと延在方位EDが一致する位置があった場合には(ステップ#27:Yes)、当該位置を地物方位一致位置P0として特定(検出)する(ステップ#28)。地物利用自車位置補正部42は、この地物方位一致位置P0に基づき、推定自車位置EPを補正する(ステップ#29)。なお、本例では、地物方位一致位置P0を推定自車位置EPと置き換えることで、推定自車位置EPの補正を行う。
【0083】
一方、ステップ#27において基準方位SDと延在方位EDが一致する位置がなかった場合には(ステップ#27:No)、処理は終了する。
【0084】
5.その他の実施形態
最後に、本発明に係るその他の実施形態を説明する。なお、以下の各々の実施形態で開示される特徴は、その実施形態でのみ利用できるものではなく、矛盾が生じない限り、別の実施形態にも適用可能である。
【0085】
(1)上記の実施形態では、地物方位一致位置検出部45が、地物方位一致位置P0を推定自車位置EPと置き換えることで、推定自車位置EPの補正を行う構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、画像認識部43により認識された対象地物と自車両100との距離にも基づいて、すなわち、地物方位一致位置P0と、画像認識部43により認識された対象地物と自車両100との距離と、に基づいて推定自車位置EPを補正する構成とすることもできる。ここで、画像認識部43により認識された対象地物と自車両100との距離は、路面の撮影画像の撮影時の自車両100と対象地物との距離、及び、撮影時から補正処理完了までの自車両100の走行距離の少なくとも一方を含むものとすることができる。なお、路面の撮影画像の撮影時の自車両100と対象地物との距離は、撮影画像中における対象地物の位置、カメラ16の方位や車載位置等から算出することができる。また、撮影時から補正処理完了までの自車両100の走行距離は、距離センサ14等で取得することができる。
【0086】
(2)上記の実施形態では、画像認識部43が相対方位RDを導出し、当該導出された相対方位RDと進行方位MDとに基づき基準方位特定部44が基準方位SDを特定する構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、相対方位RDを直接的に導出することなく画像認識結果から直接、基準方位SDを特定する構成とすることもできる。このような構成では、例えば、画像認識部43に進行方位MDの情報が入力され、画像認識部43が、当該進行方位MDの情報と画像認識結果とから直接、基準方位SDを特定する構成とすることができる。すなわち、本発明における「画像認識部43により認識された対象地物と自車両100との相対方位RDと、自車両100の進行方位MDとに基づき、対象地物の基準方位SDを特定する」とは、相対方位RDを直接的に導出する構成だけでなく、相対方位RDを直接的には導出せず、基準方位SDを特定する過程で相対方位RDを概念的に利用する構成を含む。
【0087】
(3)上記の実施形態では、推定自車位置補正部40が、推定自車位置EPが環状交差点5内にある場合に、地物利用自車位置補正部42による推定自車位置EPの補正を行い、それ以外の場合には、通常自車位置補正部41による推定自車位置EPの補正を行う構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、推定自車位置補正部40が、推定自車位置EPが環状交差点5内にない場合にも、地物利用自車位置補正部42による推定自車位置EPの補正を行う構成とすることも可能である。例えば、所定の曲率半径以下の道路(交差点を含む)や、所定の数(例えば、2,3,4等)以上の車線(レーン)を備える道路においても、地物利用自車位置補正部42による推定自車位置EPの補正を行う構成とすることができる。
【0088】
(4)上記の実施形態では、推定自車位置補正部40が、推定自車位置EPが環状交差点5内にある場合に、地物利用自車位置補正部42による推定自車位置EPの補正を行う構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、推定自車位置補正部40が、推定自車位置EPが環状交差点5内にある場合に、通常自車位置補正部41による推定自車位置EPの補正を行う構成とすることも可能である。また、環状交差点5を環状道路51の外径と内径との差(すなわち、環状道路51の幅)、環状道路51の曲率、或いは環状道路51に接続される接続道路52の個数等により環状交差点5を2つのグループに分類し、推定自車位置EPが一方のグループに属する環状交差点5内にある場合には、地物利用自車位置補正部42による推定自車位置EPの補正を行い、推定自車位置EPが他方のグループに属する環状交差点5内にある場合には、通常自車位置補正部41による推定自車位置EPの補正を行う構成とすることもできる。
【0089】
(5)上記の実施形態では、対象地物となる路面上の地物が道路標示Mである構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、道路の延在方位EDに平行な方位を基準方位SDとして設けられた道路標示M以外の路面上の地物を対象地物とすることも可能である。例えば、縁石や側溝等のような路面上に設けられた構造物を対象地物とすることが可能である。
【0090】
(6)上記の実施形態では、カメラ16が、車両100の後方の路面を撮影するバックカメラである構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、カメラ16を、車両100の前方の路面を撮影するフロントカメラとすることもできる。また、カメラ16を、車両100に対して前方側の斜め方向や後方側の斜め方向、或いは車両100の側方の路面を撮影するカメラとすることも可能である。
【0091】
(7)上記の実施形態では、リンクKの情報(リンク属性)に、当該リンクKが環状交差点5を形成する環状交差点リンクであるか否かの情報が含まれている構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、ノードNの情報(ノード属性)として、当該ノードNが環状交差点5を形成する環状交差点ノードであるか否かの情報が含まれている構成とすることができる。このような構成では、推定自車位置EPが環状交差点ノード或いは当該環状交差点ノード近傍の座標範囲内に到達したか否かに基づき、推定自車位置EPが環状交差点5内にあるか否かを判定する構成とすることができる。
【0092】
(8)上記の実施形態において説明した機能部の割り当ては単なる一例であり、複数の機能部を組み合わせたり、1つの機能部をさらに区分けしたりすることも可能である。
【0093】
(9)上記の実施形態では、本発明に係る自車位置認識システムを、ナビゲーション装置1に適用した場合を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、本発明に係る自車位置認識システムを、車両100に備えられるナビゲーション装置以外の装置(走行制御装置等)に適用することも可能である。
【0094】
(10)上記の実施形態では、自車位置認識ユニット3や道路地図データベース12が車両100に備えられる構成を例として説明したが、自車位置認識ユニット3の少なくとも一部の機能部や道路地図データベース12が、車両100の外部に設けられ、インターネット等の通信ネットワークを介して情報や信号の送受信が行われる構成とすることもできる。
【0095】
(11)その他の構成に関しても、本明細書において開示された実施形態は全ての点で例示であって、本発明の実施形態はこれに限定されない。すなわち、本願の特許請求の範囲に記載された構成及びこれと均等な構成を備えている限り、特許請求の範囲に記載されていない構成の一部を適宜改変した構成も、当然に本発明の技術的範囲に属する。
【産業上の利用可能性】
【0096】
本発明は、自車両の推定位置である推定自車位置を取得する推定自車位置取得部と、自車両の進行方位を取得する進行方位取得部と、道路の延在方位に関する情報を含む道路情報を取得する道路情報取得部と、路面の撮影画像を取得する路面画像取得部と、を備えた自車位置認識システム、自車両の推定位置である推定自車位置を取得する推定自車位置取得機能と、自車両の進行方位を取得する進行方位取得機能と、道路の延在方位に関する情報を含む道路情報を取得する道路情報取得機能と、路面の撮影画像を取得する路面画像取得機能と、を実現させるための自車位置認識プログラム、及び、自車両の推定位置である推定自車位置を取得する推定自車位置取得ステップと、自車両の進行方位を取得する進行方位取得ステップと、道路の延在方位に関する情報を含む道路情報を取得する道路情報取得ステップと、路面の撮影画像を取得する路面画像取得ステップと、を備えた自車位置認識方法に好適に利用することができる。
【符号の説明】
【0097】
5:環状交差点
31:推定自車位置取得部
32:進行方位取得部
33:路面画像取得部
34:道路情報取得部
41:通常自車位置補正部
42:地物利用自車位置補正部
43:画像認識部
44:基準方位特定部
51:環状道路
100:車両(自車両)
ED:延在方位
EP:推定自車位置
M:道路標示(対象地物)
MD:進行方位
P0:地物方位一致位置
RD:相対方位
RI:道路情報
SD:基準方位
【技術分野】
【0001】
本発明は、自車両の推定位置である推定自車位置を取得する推定自車位置取得部と、自車両の進行方位を取得する進行方位取得部と、道路の延在方位に関する情報を含む道路情報を取得する道路情報取得部と、路面の撮影画像を取得する路面画像取得部と、を備えた自車位置認識システム、自車両の推定位置である推定自車位置を取得する推定自車位置取得機能と、自車両の進行方位を取得する進行方位取得機能と、道路の延在方位に関する情報を含む道路情報を取得する道路情報取得機能と、路面の撮影画像を取得する路面画像取得機能と、を実現させるための自車位置認識プログラム、及び、自車両の推定位置である推定自車位置を取得する推定自車位置取得ステップと、自車両の進行方位を取得する進行方位取得ステップと、道路の延在方位に関する情報を含む道路情報を取得する道路情報取得ステップと、路面の撮影画像を取得する路面画像取得ステップと、を備えた自車位置認識方法に関する。
【背景技術】
【0002】
自車両の位置を認識する自車位置認識システムは、例えば車両用のナビゲーション装置等に備えられる。下記の特許文献1には、マップマッチング処理を行うことで推定自車位置を補正し、自車の走行位置を地図データの道路上に合わせる機能を備えたナビゲーション装置が記載されている。ところで、特許文献1の段落0015、0016にも記載のように、車両の進行方位が道路(道路情報が備えるリンク)の延在方位と異なる場合には、マップマッチング処理を行うと却って自車位置がずれてしまう場合がある。そこで、特許文献1に記載の構成では、車両の進行方位が道路の延在方位と異なるものとなり得るような場合(例えば環状交差点に進入した場合)には、マップマッチング処理の実行を停止する構成としている。
【0003】
しかしながら、このようにマップマッチング処理の実行を停止した場合には、推定自車位置の補正が行えないため、自車両が、地図データの道路上から外れた位置や道路上であっても実際とは異なった位置に表示されるおそれがあり、経路案内等が適切に行われない可能性がある。そのため、上記特許文献1に記載の構成では、ナビゲーション装置の使用者の利便性が低下するおそれがある。
【0004】
また、下記の特許文献2には、車両が環状道路を走行中の場合における推定自車位置の補正に関する技術が記載されている。しかしながら、特許文献2には車両の進行方位が道路の延在方位と異なる場合があり得ることに言及した記載はなく、当然ながら、上記の利便性の問題を解決するための手段について何ら示されていない。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−132922号公報
【特許文献2】特開2006−292928号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
そこで、車両の進行方位が道路の延在方位と異なる場合であっても推定自車位置を適切に補正することが可能な自車位置認識システム及び自車位置認識プログラムの実現が望まれる。
【課題を解決するための手段】
【0007】
本発明に係る、自車両の推定位置である推定自車位置を取得する推定自車位置取得部と、自車両の進行方位を取得する進行方位取得部と、道路の延在方位に関する情報を含む道路情報を取得する道路情報取得部と、路面の撮影画像を取得する路面画像取得部と、を備えた自車位置認識システムの特徴構成は、道路の延在方位に平行な方位を基準方位として設けられた路面上の地物を対象地物として、前記撮影画像に含まれる前記対象地物の画像認識処理を行う画像認識部と、前記画像認識部により認識された前記対象地物と自車両との相対方位と、自車両の進行方位とに基づき、前記対象地物の前記基準方位を特定する基準方位特定部と、前記推定自車位置の周辺の前記道路情報に基づき、前記基準方位特定部により特定された前記基準方位と延在方位が一致する道路上の位置である地物方位一致位置を検出し、当該地物方位一致位置に基づき前記推定自車位置を補正する地物利用自車位置補正部と、を備えた点にある。
【0008】
なお、本願では、方位に関して「一致」とは、完全に一致する場合だけでなく、比較の対象となる2つの方位のそれぞれの導出方法(特定方法)に応じた範囲内で、当該2つの方位がずれている場合を含む概念として用いている。
【0009】
上記の特徴構成によれば、基準方位特定部により特定される対象地物の基準方位は、当該対象地物が設けられた地点における道路の延在方位と一致する。従って、車線変更等により自車両の進行方位が道路の延在方位とは異なるような場合であっても、対象地物の基準方位を特定することで車両が位置する付近での道路の延在方位を特定することができ、当該延在方位と地図情報とに基づき検出される地物方位一致位置に基づき、推定自車位置を適切に補正することができる。
【0010】
ここで、前記推定自車位置の周辺の前記道路情報に含まれる道路の延在方位と自車両の進行方位とに基づき前記推定自車位置を補正する通常自車位置補正部を更に備え、少なくとも前記推定自車位置が環状道路を有する交差点である環状交差点内にある場合に、前記地物利用自車位置補正部による前記推定自車位置の補正を行う構成とすると好適である。
【0011】
この構成によれば、自車両の進行方位が道路の延在方位と異なる可能性が他の道路に比べて高くなり得る環状交差点において、推定自車位置を適切に補正することができる。
【0012】
また、路面に直交する軸を中心とする180度未満の回転対称性を有さない形状の路面上の地物を前記対象地物とすると好適である。
【0013】
また、道路の延在方位に対して平行な直線成分、及び道路の延在方位に対して直交する直線成分の少なくとも何れかを有する形状の路面上の地物を前記対象地物としても好適である。
【0014】
これらの構成によれば、画像認識により対象地物の基準方位を検出することが比較的容易になるため、画像認識処理の演算負荷を低減することができるとともに、対象地物の基準方位をより正確に検出することが可能となる。
【0015】
また、前記地物利用自車位置補正部は、前記画像認識部により認識された前記対象地物と自車両との距離にも基づいて前記推定自車位置を補正する構成とすると好適である。
【0016】
この構成によれば、推定自車位置の補正処理に要する時間や、路面の撮影画像の撮影時における自車両と対象地物との距離が長いような場合であっても、推定自車位置を適切に補正することが可能となる。
【0017】
以上の各構成を備えた本発明に係る自車位置認識システムの技術的特徴は、自車位置認識プログラムや自車位置認識方法にも適用可能であり、そのため、本発明は、そのようなプログラムや方法も権利の対象とすることができる。
【0018】
その場合における、自車両の推定位置である推定自車位置を取得する推定自車位置取得機能と、自車両の進行方位を取得する進行方位取得機能と、道路の延在方位に関する情報を含む道路情報を取得する道路情報取得機能と、路面の撮影画像を取得する路面画像取得機能と、を実現させるための自車位置認識プログラムの特徴構成は、道路の延在方位に平行な方位を基準方位として設けられた路面上の地物を対象地物として、前記撮影画像に含まれる前記対象地物の画像認識処理を行う画像認識機能と、前記画像認識機能により認識された前記対象地物と自車両との相対方位と、自車両の進行方位とに基づき、前記対象地物の前記基準方位を特定する基準方位特定機能と、前記推定自車位置の周辺の前記道路情報に基づき、前記基準方位特定機能により特定された前記基準方位と延在方位が一致する道路上の位置である地物方位一致位置を検出し、当該地物方位一致位置に基づき前記推定自車位置を補正する地物利用自車位置補正機能と、をコンピュータに実現させる点にある。
【0019】
また、自車両の推定位置である推定自車位置を取得する推定自車位置取得ステップと、自車両の進行方位を取得する進行方位取得ステップと、道路の延在方位に関する情報を含む道路情報を取得する道路情報取得ステップと、路面の撮影画像を取得する路面画像取得ステップと、を備えた自車位置認識方法の特徴構成は、道路の延在方位に平行な方位を基準方位として設けられた路面上の地物を対象地物として、前記撮影画像に含まれる前記対象地物の画像認識処理を行う画像認識ステップと、前記画像認識ステップにて認識された前記対象地物と自車両との相対方位と、自車両の進行方位とに基づき、前記対象地物の前記基準方位を特定する基準方位特定ステップと、前記推定自車位置の周辺の前記道路情報に基づき、前記基準方位特定ステップにて特定された前記基準方位と延在方位が一致する道路上の位置である地物方位一致位置を検出する地物方位一致位置検出ステップと、前記地物方位一致位置検出ステップにて検出された前記地物方位一致位置に基づき前記推定自車位置を補正する地物利用自車位置補正ステップと、を備える点にある。
【0020】
当然ながら、これらの自車位置認識プログラムや自車位置認識方法も上述した自車位置認識システムに係る作用効果を得ることができ、更に、その好適な構成の例として挙げたいくつかの付加的技術を組み込むことが可能である。
【図面の簡単な説明】
【0021】
【図1】本発明の実施形態に係る自車位置認識システムの概念を示す模式図である。
【図2】本発明の実施形態に係るナビゲーション装置の概略構成を示す模式図である。
【図3】本発明の実施形態に係る環状交差点の例を示す模式図である。
【図4】本発明の実施形態に係る道路情報の例を示す模式図である。
【図5】本発明の実施形態に係る対象地物の例を示す模式図である。
【図6】本発明の実施形態に係る対象地物の例を示す模式図である。
【図7】本発明の実施形態に係る推定自車位置補正処理の手順を示すフローチャートである。
【図8】本発明の実施形態に係る地物利用自車位置補正処理の手順を示すフローチャートである。
【発明を実施するための形態】
【0022】
本発明の実施形態について図面に基づいて説明する。ここでは、本発明に係る自車位置認識システムを、車載用のナビゲーション装置に適用した場合を例として説明する。本実施形態に係るナビゲーション装置1は、自車位置認識ユニット3を備え(図2参照)、この自車位置認識ユニット3を中核として自車位置認識システムが構築されている。以下、本実施形態に係る自車位置認識システム(ナビゲーション装置1)の構成について、「自車位置認識システムの概略構成」、「ナビゲーション装置の概略構成」、「自車位置認識ユニットの構成」、「動作処理の手順」の順に詳細に説明する。
【0023】
1.自車位置認識システムの概略構成
まず、本実施形態に係る自車位置認識システムの概略構成について、図1を参照して説明する。なお、図1では、車両(以下、「自車両」という場合がある。)100が車線変更を行っている場面を想定している。車両100は、自車位置認識ユニット3を有するナビゲーション装置1(図2参照)を備えている。このナビゲーション装置1は、後述するように、自車両100の推定位置である推定自車位置EPを算出する機能を備えている。また、車両100にはカメラ16(図2参照)が備えられている。本例では、カメラ16は、車両100の後方の路面を撮影するバックカメラ(リアカメラ)とされている。
【0024】
自車位置認識ユニット3は、路面上の地物の方位に基づく推定自車位置EPの補正処理(地物利用自車位置補正処理)の機能が有効に設定されている場合に、カメラ16が撮影した路面の撮影画像を取得し、道路の延在方位EDに平行な方位を基準方位SDとして設けられた路面上の地物を対象地物として、当該撮影画像に含まれる対象地物の画像認識処理を行う(ステップ#01)。なお、本実施形態では、道路標示Mを対象地物としている。また、本実施形態では、推定自車位置EPが環状交差点5(図3に一例を示す)内にある場合に、地物利用自車位置補正処理の機能が有効に設定されるように構成されている。
【0025】
そして、道路標示Mの画像認識に成功した場合には、自車位置認識ユニット3は、画像認識により取得した道路標示Mと自車両100との相対方位RDと、自車両の進行方位MDとに基づき、道路標示Mの基準方位SDを特定する(ステップ#02)。ここで特定される道路標示Mの基準方位SDは、当該道路標示Mが設けられた地点における道路の延在方位EDと一致するため、基準方位SDを特定することで、車両100が位置する付近での道路(道路上における車両100が位置する部分)の延在方位EDを特定することができる。また、自車位置認識ユニット3は、道路標示Mの画像認識に成功した場合には、推定自車位置EPの周辺の道路情報(道路地図データ)RIを道路地図データベース12から取得する(ステップ#03)。
【0026】
自車位置認識ユニット3は、推定自車位置EPの周辺の道路情報RIに基づき、上記のようして特定された基準方位SDと延在方位EDが一致する道路上(道路地図データ上)の位置である地物方位一致位置P0を検出する(ステップ#04)。そして、自車位置認識ユニット3は、上記のようにして求められた地物方位一致位置P0に基づき、推定自車位置EPを補正する(ステップ#05)。本例では、自車位置認識ユニット3は、地物方位一致位置P0を推定自車位置EPと置き換えることで、推定自車位置EPの補正を行う。本発明では、上記のように推定自車位置EPの補正を行う構成とすることで、例えば車線変更等により自車両100の進行方位MDが道路の延在方位EDとは異なるような場合であっても、車両100が位置する付近での道路の延在方位EDを対象地物(本例では道路標示M)の方位に基づき特定することができ、当該延在方位EDに基づき推定自車位置EPを適切に補正することが可能となっている。
【0027】
一方、自車位置認識ユニット3は、地物利用自車位置補正処理を実行しない場合(本例では、推定自車位置EPが環状交差点5内にない場合)には、路面上の地物の方位に基づかない推定自車位置EPの補正処理(通常自車位置補正処理)を実行するように構成されている。
【0028】
2.ナビゲーション装置の概略構成
次に、上述した自車位置認識システムを実現するナビゲーション装置1の概略構成について、図2を参照して説明する。図2に示すように、ナビゲーション装置1は、ナビ制御ユニット2と、自車位置認識ユニット3と、推定自車位置算定部11と、道路地図データベース12と、を備えている。ナビ制御ユニット2及び自車位置認識ユニット3は、後述する複数の機能部を備えている。
【0029】
そして、ナビゲーション装置1が備える各機能部は、互いに共通の或いはそれぞれ独立のCPU等の演算処理装置を中核部材として、入力されたデータに対して種々の処理を行うための機能部がハードウェア又はソフトウェア(プログラム)或いはその両方により実装されて構成されている。また、これらの各機能部は、デジタル転送バス等の通信線を介して互いに情報の受け渡しを行うことができるように構成されているとともに、道路地図データベース12からデータ(道路情報RI)を抽出可能に構成されている。ここで、各機能部がソフトウェア(プログラム)により構成される場合には、当該ソフトウェアは、演算処理装置が参照可能なRAMやROM等の記憶手段に記憶される。
【0030】
また、道路地図データベース12は、記憶装置により構成される。この記憶装置は、例えば、ハードディスクドライブ、フラッシュメモリ等のように、情報を記憶及び書き換え可能な記録媒体をハードウェア構成として備える。
【0031】
ナビ制御ユニット2は、経路設定部21、経路探索部22、及び経路案内部23を備えている。経路設定部21は、例えば自車位置等の出発地、入力された目的地、通過地点や走行条件(高速道路の使用有無など)を設定する機能部である。経路探索部22は、経路設定部21によって設定された条件に基づき出発地から目的地までの案内経路を探索するための演算処理(経路探索処理)を行う機能部である。経路案内部23は、経路探索部22により探索された出発地から目的地までの経路に従って、モニタ(図示せず)の表示画面による案内表示やスピーカ(図示せず)による音声案内等により、運転者に対して適切な経路案内を行うための演算処理(経路案内処理)を行う機能部である。
【0032】
道路地図データベース12は、上記の経路探索処理や経路案内処理を実行する際や、モニタへの地図表示処理を実行する際等に参照される道路情報(道路地図データ)RIを格納している。道路情報RIは、道路の延在方位EDに関する情報を含み、本例では、図4に一例を示すように、ノードN及びリンクKにより道路を表現する情報とされている。ノードNは、例えば道路の交差点、折曲点、分岐点等に設定される。なお、図4は、図3に一例を示す環状交差点5に対応する道路情報RIを概念的に表したものである。
【0033】
補足説明すると、道路情報RIは、緯度及び経度で表現された地図上の位置情報を有する多数のノードNの情報と、2つのノードNを連結して道路に対応する経路を構成する多数のリンクKの情報とを有して構成されている。すなわち、本例では、リンクKの情報が、道路の延在方位EDに関する情報を表す。道路情報RIは、各リンクKのリンク情報(リンク属性)として、道路の種別(高速道路、有料道路、国道、県道等の種別)やリンク長さ等の情報を有している。本実施形態では、リンク情報には、当該リンクKが環状交差点5を形成する環状交差点リンクであるか否かの情報も含まれている。道路情報RIは、さらに、2つのノードNの間(リンクK上)に配置されてリンクKの詳細形状を表す形状補間点Sの情報や道路幅の情報を有している。
【0034】
なお、上記のような道路情報RIは、データベース化され、道路地図データベース12の仕様に応じた形態で格納されている。例えば、道路情報RIが、互いに関連付けられた複数のレイヤに分かれて道路地図データベース12に格納された構成とすることができる。具体的には、ノードNとリンクKにより道路間の接続情報を示すレイヤ(道路ネットワークレイヤ)、形状補間点Sや道路幅の情報を示すレイヤ(道路形状レイヤ)、及び、道路に関する詳細な情報(道路上や道路周辺に設けられた各種地物の情報等)を示すレイヤ(道路属性レイヤ)を含む少なくとも3つのレイヤに分かれて道路情報RIが備えられた構成とすることができる。
【0035】
推定自車位置算定部11は、車両100に備えられたGPS測定ユニット13、距離センサ14、及び方位センサ15の出力に基づき、自車両100の推定位置である推定自車位置EPを算定する機能部である。GPS測定ユニット13は、GPS衛星からのGPS信号を受信し、当該GPS信号を推定自車位置算定部11へ出力する。また、距離センサ14は、車両100の車速や移動距離を検出し、検出結果としての車速及び移動距離の情報を推定自車位置算定部11へ出力する。方位センサ15は、例えば、ジャイロセンサ、地磁気センサ(電子コンパス)等により構成され、その検出結果としての方位の情報を推定自車位置算定部11へ出力する。
【0036】
推定自車位置算定部11は、GPS信号を解析し、車両100の現在位置(緯度及び経度)を算定し、GPS位置データを得る。また、推定自車位置算定部11は、刻々と送られてくる移動距離情報と方位情報とに基づいて推測航法位置を演算し、推測航法位置データを得る。そして、推定自車位置算定部11は、GPS位置データと推測航法位置データとから公知の方法により車両100の推定位置である推定自車位置EPを算定する演算を行う。なお、推定自車位置算定部11が、GPS位置データ及び推測航法位置データの何れか一方のみを用いて推定自車位置EPを算定する構成とすることも可能である。
【0037】
自車位置認識ユニット3は、詳細は後述するが、推定自車位置算定部11が算定した推定自車位置EPを補正するための推定自車位置補正部40を備えている。本実施形態に係るナビゲーション装置1は、この自車位置認識ユニット3を備えることで、測定誤差が含まれ得る推定自車位置EPを適切に補正し、推定自車位置EPが道路上から外れるような場合でも、自車位置を道路地図に示される道路上に適切に補正(マップマッチング)することが可能となっている。
【0038】
3.自車位置認識ユニットの構成
次に、本発明の要部である自車位置認識ユニット3の構成について説明する。図2に示すように、自車位置認識ユニット3は、推定自車位置取得部31、進行方位取得部32、路面画像取得部33、道路情報取得部34、及び推定自車位置補正部40を備えている。
【0039】
3−1.推定自車位置取得部の構成
推定自車位置取得部31は、自車両100の推定位置である推定自車位置EPを取得する機能部である。本実施形態では、推定自車位置算定部11が算定した推定自車位置EPが推定自車位置取得部31に入力されることで、推定自車位置取得部31が推定自車位置EPを取得するように構成されている。
【0040】
なお、推定自車位置取得部31に推定自車位置EPの導出過程の情報が入力され、推定自車位置取得部31が当該情報に基づき推定自車位置EPを導出し、推定自車位置EPを取得する構成とすることもできる。例えば、推定自車位置取得部31に、GPS位置データと推測航法位置データとが入力される構成とすることができる。また、推定自車位置取得部31に、GPS測定ユニット13、距離センサ14、方位センサ15の検出結果が入力される構成とすることもできる。
【0041】
3−2.進行方位取得部の構成
進行方位取得部32は、自車両100の進行方位MDを取得する機能部である。具体的には、進行方位取得部32は、絶対方位での自車両100の進行方位MDを取得する。本例では、方位センサ15は絶対方位を検出可能な地磁気センサ(電子コンパス)とされ、方位センサ15の検出結果(絶対角度)が進行方位取得部32に入力されるように構成されている。そして、進行方位取得部32は、方位センサ15から入力された検出結果を自車両100の進行方位MDとすることで、進行方位MDを取得する。なお、「絶対方位」とは、絶対座標系(例えば地理座標系)での予め定められた方位(例えば地磁気の方向)を基準として一意に定まる方位を意味する。上述したように、本実施形態では、道路情報RIは、緯度及び経度で表現されたノードNの情報を含む。よって、本実施形態では、道路情報RIに含まれる道路の延在方位EDに関する情報は、絶対方位での延在方位EDに関する情報とされている。
【0042】
なお、方位センサ15が相対角度を検出するジャイロセンサとされる場合には、進行方位取得部32が方位センサ15の検出結果(相対角度)と以前の進行方位MDとに基づき、現在の進行方位MDを導出して取得する構成とすることができる。また、方位センサ15が相対角度を検出するジャイロセンサとされる場合に、推定自車位置算定部11が方位センサ15の検出結果と以前の進行方位MDとに基づき現在の進行方位MDを導出し、当該導出された進行方位MDを進行方位取得部32が取得する構成とすることもできる。
【0043】
3−3.路面画像取得部の構成
路面画像取得部33は、路面の撮影画像を取得する機能部である。上記のように車両100には路面を撮影するためのカメラ16が備えられており、路面画像取得部33は、カメラ16により撮影された路面の撮影画像を取得する。本例ではカメラ16はバックカメラとされており、路面画像取得部33は車両100の後方の路面の撮影画像を取得する。
【0044】
路面画像取得部33が取得した撮影画像は、後述する地物利用自車位置補正部42による地物利用自車位置補正処理に用いられる。よって、本実施形態では、路面画像取得部33は、地物利用自車位置補正処理の機能が有効に設定されている場合に、所定のタイミングで路面の撮影画像を取得する。この所定のタイミングは、例えば、所定の時間間隔毎(例えば1秒毎等)に設定したり、車両100が所定の距離(例えば1メートル等)を進む毎に設定したりすることができる。そして、路面画像取得部33が取得した撮影画像は、地物利用自車位置補正部42が備える画像認識部43へ出力される。
【0045】
3−4.道路情報取得部の構成
道路情報取得部34は、道路の延在方位EDに関する情報を含む道路情報RIを取得する機能部である。上記のように、本実施形態では道路情報RIを記憶した道路地図データベース12がナビゲーション装置1に備えられており、道路情報取得部34は、道路情報RIを道路地図データベース12から抽出して取得する。
【0046】
道路情報取得部34が取得した道路情報RIは、後述する推定自車位置補正部40(通常自車位置補正部41及び地物利用自車位置補正部42)による推定自車位置補正処理に用いられる。よって、本実施形態では、道路情報取得部34は、通常自車位置補正部41や地物利用自車位置補正部42からの要求に応じて、道路地図データベース12から道路情報RIを取得する。
【0047】
3−5.推定自車位置補正部の構成
推定自車位置補正部40は、推定自車位置取得部31が取得した推定自車位置EPを補正する機能部、すなわち、推定自車位置補正処理を実行する機能部である。推定自車位置補正部40は、通常自車位置補正部41と地物利用自車位置補正部42とを備えている。そして、本実施形態では、推定自車位置補正部40は、推定自車位置EPが環状道路(周回道路)51を有する交差点である環状交差点5(図3参照)内にある場合に、地物利用自車位置補正処理の機能を有効に設定し、地物利用自車位置補正部42による推定自車位置EPの補正を行う。また、推定自車位置補正部40は、推定自車位置EPが環状交差点5内にない場合には、通常自車位置補正処理の機能を有効に設定し、通常自車位置補正部41による推定自車位置EPの補正を行う。
【0048】
なお、本実施形態では、上記のように、リンク情報(リンク属性)には、当該リンクKが環状交差点リンクであるか否かの情報が含まれている。そのため、推定自車位置補正部40は、当該リンク情報に基づき、推定自車位置EPが環状交差点5内にあるか否かを判定する。具体的には、推定自車位置EPが環状交差点リンク或いは当該環状交差点リンクの近傍の座標範囲内に進入している場合に、推定自車位置EPが環状交差点5内にあると判定する構成とすることができる。なお、環状交差点5が備える環状道路51を含む座標範囲を環状交差点5毎に予め定めておき、推定自車位置EPが当該座標範囲内にある場合に、推定自車位置EPが環状交差点5内にあると判定する構成とすることもできる。
【0049】
3−5−1.通常自車位置補正部の構成
通常自車位置補正部41は、推定自車位置EPの周辺の道路情報RIに含まれる道路の延在方位EDと自車両100の進行方位MDとに基づき推定自車位置EPを補正する機能部、すなわち、通常自車位置補正処理を実行する機能部である。この際、通常自車位置補正部41は、推定自車位置取得部31が取得した推定自車位置EPの情報を取得するととともに、道路情報取得部34が取得した当該推定自車位置EPの周辺の道路情報RIを取得する。
【0050】
本実施形態では、通常自車位置補正部41は、路面上の地物の方位に基づかない推定自車位置EPの補正処理(通常自車位置補正処理)を実行する。このような通常自車位置補正処理としては、マップマッチング(自車位置を道路地図に示される道路上に合わせるための補正)を行うための公知の手法(マップマッチング法)を採用することができる。詳細な説明は省略するが、例えば、上記特許文献1の段落0009〜0013に記載のパターンマッチング法や投影法を採用して、通常自車位置補正部41による推定自車位置EPの補正を行う構成とすることができる。
【0051】
なお、通常自車位置補正部41が通常自車位置補正処理を実行する際に必要となる道路情報RIの範囲はマップマッチングの手法により異なり、通常自車位置補正部41は、採用するマップマッチング法を実行するために必要な範囲の道路情報RIを道路情報取得部34を介して道路地図データベース12から取得する。
【0052】
通常自車位置補正部41による推定自車位置EPの補正は、通常自車位置補正処理の機能が有効に設定されている場合(本例では、推定自車位置EPが環状交差点5内にない場合)に、所定のタイミングで実行される。この所定のタイミングは、所定の時間間隔毎(例えば1秒、2秒、5秒毎等)に設定したり、車両100が所定の距離(例えば1メートル、2メートル、5メートル等)を進む毎に設定したりすることができる。また、所定のタイミングを、推定自車位置EPが新たなリンクK或いは当該新たなリンクK近傍の座標範囲内に進入する毎に設定したり、推定自車位置EPと道路地図に示される道路とのズレが所定の閾値を超える毎に設定したりすることもできる。
【0053】
3−5−2.地物利用自車位置補正部の構成
地物利用自車位置補正部42は、推定自車位置EPの周辺の道路情報RIに含まれる道路の延在方位EDと路面上の地物の基準方位SDとに基づき推定自車位置EPを補正する機能部、すなわち、地物利用自車位置補正処理を実行する機能部である。地物利用自車位置補正部42は、図2に示すように、画像認識部43と、基準方位特定部44と、地物方位一致位置検出部45とを備えている。そして、地物利用自車位置補正部42は、地物方位一致位置検出部45が検出した地物方位一致位置P0に基づき推定自車位置EPを補正するように構成されている。
【0054】
3−5−2−1.画像認識部の構成
画像認識部43は、道路の延在方位EDに平行な方位を基準方位SDとして設けられた路面上の地物を対象地物として、撮影画像に含まれる対象地物の画像認識処理を行う機能部である。具体的には、画像認識部43は、路面画像取得部33が取得した路面の撮影画像を用い、当該撮影画像に対して二値化処理やエッジ検出処理等を行うことで、当該撮影画像に含まれている地物の輪郭情報を抽出する。その後、画像認識部43は、抽出された地物の輪郭情報と、対象地物の形態の特徴量とのパターンマッチングを行い、対象地物の形態と一致する輪郭情報の抽出処理を行う。そして、対象地物の形態と一致する輪郭情報が抽出された場合には、当該輪郭情報を対象地物として認識し、対象地物の画像認識に成功したと判定する。本実施形態では、このような画像認識部43による道路標示Mの認識処理は、路面画像取得部33から新たな撮影画像を取得する度に実行される。
【0055】
そして、画像認識部43は、対象地物の画像認識に成功した場合には、当該認識された対象地物と自車両100との相対方位RDを導出する。すなわち、画像認識部43は、自車両100の進行方位MDを基準とする対象地物の相対的な(相対方位での)基準方位SDを導出する。ここで、撮影画像中における自車両100の方位(すなわち進行方位MD)は、車両100の進行方位MDによらず撮影画像中において一定の方向(図1に示す例では上下方向)となる。また、撮影画像中における対象地物の基準方位SDは、対象地物として認識された輪郭情報から取得することができる。よって、対象地物の画像認識に成功した場合には、図1に概念的に示すように、撮影画像中における自車両100の方位(進行方位MD)を表す線分と対象地物の基準方位SDを表す線分とが成す角度に基づき、相対方位RDを導出することができる。なお、詳細な説明は省略するが、カメラ16は路面よりも高い位置に設置されるため、相対方位RDの導出時には、路面に対する撮影角度も考慮される。そして、導出された相対方位RDは、基準方位特定部44へ出力される。
【0056】
上述したように、本実施形態では、道路の延在方位EDに平行な方位を基準方位SDとして設けられた道路標示Mを対象地物としている。ここで、「道路標示M」とは、ペイント等により路面に設けられた規制や指示のための記号や文字である。例えば、進行方向等を表す矢印状の標示(矢印標示、図5参照)、速度(例えば最高速度)等の文字を表す文字標示(図6参照)、横断歩道であることを示す標示(図示せず)、区画線(中央線や車線境界線(レーンマーク)等)を表す標示(図示せず)等が、道路標示Mに含まれる。
【0057】
そして、路面上に設けられた地物(本例では道路標示M)は、道路に対する向きが予め定められているため、画像認識により得られた輪郭情報が表す形状と向きとから、基準方位SDを導出することができる。なお、図5に示すような直線状の矢印標示では、矢印の指す方向が一般的に基準方位SDとされる。また、図6に示すような文字標示では、文字の下から上へ向かう向きが一般的に基準方位SDとされる。
【0058】
本発明で対象とする対象地物にはあらゆる形状のものが含まれるが、画像認識により対象地物の基準方位SDを検出することが容易な形状の地物を対象地物とするのが好ましい。具体的には、路面に直交する軸を中心とする180度未満の回転対称性を有さない形状の路面上の地物を対象地物とすると好適である。例えば、図5及び図6に示すように、路面に直交する軸(紙面に直交する軸)を中心とする回転対称性を有さない形状の地物や、図示は省略するが、路面に直交する軸を中心とする180度の回転対称性を有する形状(例えば、I字状)の地物を対象地物とすることができる。
【0059】
また、道路の延在方位EDに対して平行な直線成分M1、及び道路の延在方位EDに対して直交する直線成分M2の少なくとも何れかを有する形状の路面上の地物を対象地物としても好適である。図5に例示する地物は、道路の延在方位EDに対して平行な直線成分M1、及び道路の延在方位EDに対して直交する直線成分M2の双方を有する形状を備えている。このような構成でも、画像認識により対象地物の基準方位SDを検出することが容易となる。
【0060】
なお、図5に示す例では、形状に関する上述した双方の要件を満たす形状、すなわち、路面に直交する軸を中心とする180度未満の回転対称性を有さない形状であって、更に、道路の延在方位EDに対して平行な直線成分M1、及び道路の延在方位EDに対して直交する直線成分M2の少なくとも何れかを有する形状となっている。一方、図6に示す例では、形状に関する上述した双方の要件の一方のみを満たす形状、すなわち、路面に直交する軸を中心とする180度未満の回転対称性を有さない形状ではあるが、道路の延在方位EDに対して平行な直線成分M1や、道路の延在方位EDに対して直交する直線成分M2を有意には備えない形状となっている。なお、図示は省略するが、形状に関する上述した双方の要件の他方のみを満たす形状、すなわち、路面に直交する軸を中心とする180度未満(例えば90度や45度)の回転対称性を有する形状ではあるが、道路の延在方位EDに対して平行な直線成分M1、及び道路の延在方位EDに対して直交する直線成分M2の少なくとも何れかを有する形状の地物を対象地物とすることもできる。
【0061】
ところで、本発明では、対象地物の情報(種別や配設位置等)が道路地図データベース12に備えられている必要性は必ずしもないが、道路地図データベース12に対象地物の情報が備えられている場合には、画像認識部43による対象地物の画像認識処理を実行する際に、当該対象地物の情報を参照する構成とすることができる。このような構成とした場合には、対象地物の画像認識及び相対方位RDの導出をより容易に行うことが可能となり、画像認識部43の構成の簡素化を図ることができる。
【0062】
3−5−2−2.基準方位特定部の構成
基準方位特定部44は、画像認識部43により認識された対象地物と自車両100との相対方位RD(すなわち、自車両の進行方位MDを基準とする相対方位での基準方位SD)と、自車両100の進行方位MDとに基づき、画像認識部43により認識された対象地物の基準方位SDを特定する機能部である。上記のように、基準方位特定部44には、画像認識部43が対象地物(本例では道路標示M)の画像認識に成功した場合に、当該対象地物の相対方位RDに関する情報が入力される。
【0063】
基準方位特定部44は、対象地物の相対方位RDを取得した場合には、車両100の進行方位MDを進行方位取得部32から取得する。本実施形態では、基準方位特定部44は、対象地物を含む撮影画像の撮影時又は路面画像取得部33による当該撮影画像の取得時における車両100の進行方位MDを取得する。そして、基準方位特定部44は、相対方位RDの符号(方向)を考慮して進行方位MDと相対方位RDとを加算或いは減算することで、対象地物の基準方位SDを特定する。すなわち、ここで特定される基準方位SDは、進行方位MDと同じ座標系での方位となる。そして、特定された基準方位SDは、地物方位一致位置検出部45へ出力される。なお、上述したように、進行方位取得部32が取得する車両100の進行方位MDは、絶対方位での進行方位MDであるため、基準方位特定部44にて特定される対象地物の基準方位SDも、絶対方位での基準方位SDとなる。すなわち、基準方位特定部44は、進行方位MDを基準とする相対方位での基準方位SDを、絶対方位での基準方位SDに変換する。これにより、基準方位SDを、同じく絶対方位で表された道路情報RIから得られる道路の延在方位EDと比較することが可能となる。
【0064】
ところで、基準方位SDは、対象地物が設けられた地点における道路の延在方位EDと一致する。すなわち、本発明によれば、例えば車線変更等により自車両100の進行方位MDが道路の延在方位EDとは異なるような場合であっても、対象地物(本例では道路標示M)の基準方位SDを特定することで、車両100が位置する付近での道路の延在方位EDを特定することが可能となっている。
【0065】
3−5−2−3.地物方位一致位置検出部の構成
地物方位一致位置検出部45は、推定自車位置EPの周辺の道路情報RIに基づき、基準方位SDと延在方位EDが一致する道路上の位置である地物方位一致位置P0を検出する機能部である。上記のように、地物方位一致位置検出部45には、基準方位特定部44が特定した基準方位SDの情報が入力される。そして、地物方位一致位置検出部45は、基準方位SDを取得すると、当該基準方位SDと推定自車位置EPの周辺の道路情報RIとに基づき、地物方位一致位置P0を導出する。なお、これまでに述べたように、この基準方位SDは、当該対象地物が設けられた地点における道路の延在方位EDと一致する。
【0066】
具体的には、地物方位一致位置検出部45は、基準方位特定部44より基準方位SDが入力されると、推定自車位置取得部31が取得した推定自車位置EPの周辺の道路情報RIを、道路情報取得部34を介して道路地図データベース12から取得する。本実施形態では、地物方位一致位置検出部45は、対象地物を含む撮影画像の撮影時又は路面画像取得部33による当該撮影画像の取得時における推定自車位置EPの周辺の道路情報RIを取得する。なお、取得する道路情報RIの範囲は、例えば、推定自車位置EPに含まれ得る誤差の最大値に基づき設定することができる。具体的には、取得する道路情報RIの範囲を、推定自車位置EPを中心とし、半径が上記誤差の最大値に一致する円形状領域の内側とすることができる。
【0067】
また、本実施形態では、上記のように、推定自車位置EPが環状道路51を有する交差点である環状交差点5内にある場合に、地物利用自車位置補正部42による推定自車位置EPの補正を行うように構成されている。よって、取得する道路情報RIの範囲を、環状交差点5を構成する環状道路51の全体や一部を含む範囲とすることもできる。この場合の「一部」としては、例えば、自車位置を中心として両側に均等な長さ(距離)の道路が含まれるような環状道路51の部分(例えば、半円弧状の部分)とすることができる。
【0068】
地物方位一致位置検出部45は、取得した道路情報RIに含まれる道路の延在方位EDを特定する。本実施形態では、上記のように、道路情報RIは、各道路に対応するリンクK(図4参照)の情報を有しており、地物方位一致位置検出部45は、当該リンクKの方位に基づき道路の延在方位EDを特定する。そして、地物方位一致位置検出部45は、基準方位SDと延在方位EDが一致する道路上(道路地図データ上)の位置を検出して、当該位置を地物方位一致位置P0とする。なお、地物方位一致位置検出部45が基準方位SDと延在方位EDが一致する道路上(道路地図データ上)の位置を検出できなかった場合には、今回の撮影画像に基づく推定自車位置EPの補正は行われない。
【0069】
なお、リンクKが表す道路が一方通行の道路(例えば、図3に示す環状道路51)である場合には、リンク情報(リンク属性)に道路の進行方向に関する情報が含まれる場合がある。このような場合、地物方位一致位置検出部45が、取得した道路情報RIに含まれる道路の延在方位EDをベクトルで取得し、方向も考慮して基準方位SDと延在方位EDが一致する道路上(道路地図データ上)の位置を検出する構成とすると好適である。
【0070】
ところで、本実施形態では、図4に示すように、リンクKの形状が、道路の延在方位EDに沿って隣接する2つのノードNや形状補間点Sの間を直線的に連結するものとされている。そのため、図3に示す環状道路51のように道路の延在方位EDが連続的に変化する場合でも、図4に示すようにリンクKの形状は段階的に変化する。このような場合、地物方位一致位置検出部45が道路情報RIから取得する道路の延在方位EDも、段階的に変化するものとなる。
【0071】
上記のような道路の延在方位EDの導出方法に鑑みて、本実施形態では、地物方位一致位置検出部45は、地物方位一致位置P0を検出する際に、基準方位SDと道路の延在方位EDとが完全に一致しない場合であっても、当該2つの方位の間のずれが所定の範囲内である場合には、基準方位SDと道路の延在方位EDとが一致すると判定するように構成されている。なお、基準方位SDとのずれが所定の範囲内の延在方位EDを有する道路上の位置(地点)が複数ある場合には、当該ずれが最も小さい位置(地点)を選択する構成とすることができる。この際、推定自車位置EPとの間の距離も考慮し、当該距離が短いものの優先度を高くすることもできる。
【0072】
ところで、上記のようにして求められる地物方位一致位置P0は、道路の延在方位EDに沿って隣接する2つのノードNや形状補間点Sの間を連結する直線(すなわちリンクKの全部或いは一部)上の位置まで特定されたものではない。地物方位一致位置P0をさらに特定する場合には、当該直線(線分)の中点を地物方位一致位置P0とすることができる。また、前回求めた推定自車位置EPからリンクKに沿って、前回推定自車位置EPを求めた時点から現在までの車両100の移動距離だけ移動させた位置が当該直線上にある場合には、当該位置を地物方位一致位置P0とすることができる。或いは、基準方位SDと道路の延在方位EDとの一致度に応じて、完全に一致する場合に当該直線の中点を地物方位一致位置P0とし、ずれがある場合には、一致度の低下度合に応じて当該直線の中点から当該直線の端に向かって移動させた地点を地物方位一致位置P0とする構成とすることもできる。
【0073】
なお、道路情報RIに道路の曲率に関する情報が含まれている場合には、道路の延在方位EDに沿って隣接する2つのノードNや形状補間点Sの間を結ぶ曲線を当該曲率に基づき想定し、当該曲線の接線方向を道路の延在方位EDとすることで、道路情報RIから取得する道路の延在方位EDを連続的に変化するものとすることができる。道路の曲率に関する情報としては、対象の道路が環状交差点5である場合には、当該環状交差点5の径に関する情報とすることができる。そして、このような場合には、方位のずれに関する上記所定の範囲を小さくすることができ、例えば、上記所定の範囲を一点として、基準方位SDと道路の延在方位EDとが完全に一致する場合に、基準方位SDと道路の延在方位EDとが一致すると判定するように構成することもできる。
【0074】
具体的には、例えば、対象の道路が一定の曲率で湾曲する道路である場合に、道路情報RIが当該対象の道路についての曲率半径及び曲率中心(湾曲に沿う仮想円の中心)の情報を備えていれば、これらの曲率半径及び曲率中心から定まる曲線(円弧)の接線方向を道路の延在方位EDとすることができる。また、例えば、対象の道路が一定の曲率で湾曲する道路である場合に、道路情報RIが当該対象の道路についての曲率及び距離(道路の長さ)の情報を備えていれば、これらの曲率及び距離から定まる曲線(円弧)の接線方向を道路の延在方位EDとすることができる。なお、このような場合には、道路情報RIが少なくとも対象の道路について、ノードNやリンクKに関する情報を備えない構成とすることも可能である。
【0075】
そして、地物方位一致位置検出部45が検出した地物方位一致位置P0に基づき、地物利用自車位置補正部42は、推定自車位置取得部31が取得した推定自車位置EPを補正する。本実施形態では、地物方位一致位置検出部45は、地物方位一致位置P0を推定自車位置EPと置き換えることで、推定自車位置EPの補正を行う。これにより、例えば車線変更等により自車両100の進行方位MDが道路の延在方位EDとは異なるような場合であっても、対象地物(本例では道路標示M)の基準方位SDを特定することで車両100が位置する付近での道路の延在方位EDを特定して、当該延在方位EDに基づき推定自車位置EPを適切に補正することが可能となっている。
【0076】
なお、図3に示す例では、環状交差点5が備える環状道路51は円形となっているが、環状道路51には円形以外のもの(楕円形等)も含まれる。また、環状道路51は、全体として環状に形成されているあらゆる形状の道路を含み、例えば多角形状に形成された道路も環状道路51に含まれる。また、図3に示す例では、環状道路51は一方通行の道路であるが、環状道路51が対面通行が可能な道路であっても良い。
【0077】
4.動作処理の手順
次に、図7、図8を参照して、本実施形態に係る自車位置認識ユニット3において実行される推定自車位置補正処理(自車位置認識処理)の手順、すなわち推定自車位置補正方法(自車位置認識方法)について説明する。以下に説明する推定自車位置補正処理の手順は、上記のナビゲーション装置1(自車位置認識ユニット3)の各機能部を構成するハードウェア又はソフトウェア(プログラム)或いはその両方により実行される。上記の各機能部がプログラムにより構成される場合には、ナビゲーション装置1が有する演算処理装置が、上記の各機能部を構成するプログラムを実行するコンピュータとして動作する。なお、図8は、図7のステップ#12の地物利用自車位置補正処理の手順を示すフローチャートである。
【0078】
4−1.推定自車位置補正処理の全体の手順
図7に示すように、推定自車位置取得部31が推定自車位置EPを取得すると(ステップ#10)、当該推定自車位置EPが環状交差点5内にあるか否かが判定される(ステップ#11)。そして、推定自車位置EPが環状交差点5内にある場合には(ステップ#11:Yes)、地物利用自車位置補正部42による地物利用自車位置補正処理が実行される(ステップ#12)。なお、地物利用自車位置補正処理については、後に図8のフローチャートに基づいて詳細に説明する。
【0079】
一方、推定自車位置EPが環状交差点5内にない場合には(ステップ#11:No)、通常自車位置補正部41による通常自車位置補正処理が実行される(ステップ#13)。この通常自車位置補正処理では、道路情報取得部34が取得した推定自車位置EPの周辺の道路情報RIに含まれる道路の延在方位EDと自車両100の進行方位MDとに基づき、公知のマップマッチング法に基づき推定自車位置EPの補正が行われる。
【0080】
4−2.地物利用自車位置補正処理の手順
次に、図8を参照して地物利用自車位置補正処理の手順について説明する。地物利用自車位置補正処理では、まず初めに、路面画像取得部33により路面の撮影画像が取得される(ステップ#20)。そして、この取得された撮影画像に対して、画像認識部43が対象地物(本例では道路標示M)の画像認識処理を行う(ステップ#21)。この画像認識処理の結果、対象地物の画像認識に成功しなかった場合には(ステップ#22:No)、処理は終了する。
【0081】
一方、対象地物の画像認識に成功した場合には(ステップ#22:Yes)、画像認識部43は、認識された当該対象地物と自車両100との相対方位RDを導出する(ステップ#23)。次に、進行方位取得部32が車両100の進行方位MDを取得する(ステップ#24)。そして、基準方位特定部44は、画像認識部43が導出した相対方位RDと、進行方位取得部32が取得した車両100の進行方位MDとに基づき、画像認識部43により認識された対象地物の基準方位SDを特定する(ステップ#25)。
【0082】
基準方位SDが特定されると、地物方位一致位置検出部45は、推定自車位置EPの周辺の道路情報RIを道路情報取得部34を介して道路地図データベース12から取得する(ステップ#26)。そして、地物方位一致位置検出部45は、基準方位SDと延在方位EDが一致する位置が、取得した道路情報RIに含まれる道路上にあるか否かを判定する(ステップ#27)。そして、基準方位SDと延在方位EDが一致する位置があった場合には(ステップ#27:Yes)、当該位置を地物方位一致位置P0として特定(検出)する(ステップ#28)。地物利用自車位置補正部42は、この地物方位一致位置P0に基づき、推定自車位置EPを補正する(ステップ#29)。なお、本例では、地物方位一致位置P0を推定自車位置EPと置き換えることで、推定自車位置EPの補正を行う。
【0083】
一方、ステップ#27において基準方位SDと延在方位EDが一致する位置がなかった場合には(ステップ#27:No)、処理は終了する。
【0084】
5.その他の実施形態
最後に、本発明に係るその他の実施形態を説明する。なお、以下の各々の実施形態で開示される特徴は、その実施形態でのみ利用できるものではなく、矛盾が生じない限り、別の実施形態にも適用可能である。
【0085】
(1)上記の実施形態では、地物方位一致位置検出部45が、地物方位一致位置P0を推定自車位置EPと置き換えることで、推定自車位置EPの補正を行う構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、画像認識部43により認識された対象地物と自車両100との距離にも基づいて、すなわち、地物方位一致位置P0と、画像認識部43により認識された対象地物と自車両100との距離と、に基づいて推定自車位置EPを補正する構成とすることもできる。ここで、画像認識部43により認識された対象地物と自車両100との距離は、路面の撮影画像の撮影時の自車両100と対象地物との距離、及び、撮影時から補正処理完了までの自車両100の走行距離の少なくとも一方を含むものとすることができる。なお、路面の撮影画像の撮影時の自車両100と対象地物との距離は、撮影画像中における対象地物の位置、カメラ16の方位や車載位置等から算出することができる。また、撮影時から補正処理完了までの自車両100の走行距離は、距離センサ14等で取得することができる。
【0086】
(2)上記の実施形態では、画像認識部43が相対方位RDを導出し、当該導出された相対方位RDと進行方位MDとに基づき基準方位特定部44が基準方位SDを特定する構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、相対方位RDを直接的に導出することなく画像認識結果から直接、基準方位SDを特定する構成とすることもできる。このような構成では、例えば、画像認識部43に進行方位MDの情報が入力され、画像認識部43が、当該進行方位MDの情報と画像認識結果とから直接、基準方位SDを特定する構成とすることができる。すなわち、本発明における「画像認識部43により認識された対象地物と自車両100との相対方位RDと、自車両100の進行方位MDとに基づき、対象地物の基準方位SDを特定する」とは、相対方位RDを直接的に導出する構成だけでなく、相対方位RDを直接的には導出せず、基準方位SDを特定する過程で相対方位RDを概念的に利用する構成を含む。
【0087】
(3)上記の実施形態では、推定自車位置補正部40が、推定自車位置EPが環状交差点5内にある場合に、地物利用自車位置補正部42による推定自車位置EPの補正を行い、それ以外の場合には、通常自車位置補正部41による推定自車位置EPの補正を行う構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、推定自車位置補正部40が、推定自車位置EPが環状交差点5内にない場合にも、地物利用自車位置補正部42による推定自車位置EPの補正を行う構成とすることも可能である。例えば、所定の曲率半径以下の道路(交差点を含む)や、所定の数(例えば、2,3,4等)以上の車線(レーン)を備える道路においても、地物利用自車位置補正部42による推定自車位置EPの補正を行う構成とすることができる。
【0088】
(4)上記の実施形態では、推定自車位置補正部40が、推定自車位置EPが環状交差点5内にある場合に、地物利用自車位置補正部42による推定自車位置EPの補正を行う構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、推定自車位置補正部40が、推定自車位置EPが環状交差点5内にある場合に、通常自車位置補正部41による推定自車位置EPの補正を行う構成とすることも可能である。また、環状交差点5を環状道路51の外径と内径との差(すなわち、環状道路51の幅)、環状道路51の曲率、或いは環状道路51に接続される接続道路52の個数等により環状交差点5を2つのグループに分類し、推定自車位置EPが一方のグループに属する環状交差点5内にある場合には、地物利用自車位置補正部42による推定自車位置EPの補正を行い、推定自車位置EPが他方のグループに属する環状交差点5内にある場合には、通常自車位置補正部41による推定自車位置EPの補正を行う構成とすることもできる。
【0089】
(5)上記の実施形態では、対象地物となる路面上の地物が道路標示Mである構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、道路の延在方位EDに平行な方位を基準方位SDとして設けられた道路標示M以外の路面上の地物を対象地物とすることも可能である。例えば、縁石や側溝等のような路面上に設けられた構造物を対象地物とすることが可能である。
【0090】
(6)上記の実施形態では、カメラ16が、車両100の後方の路面を撮影するバックカメラである構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、カメラ16を、車両100の前方の路面を撮影するフロントカメラとすることもできる。また、カメラ16を、車両100に対して前方側の斜め方向や後方側の斜め方向、或いは車両100の側方の路面を撮影するカメラとすることも可能である。
【0091】
(7)上記の実施形態では、リンクKの情報(リンク属性)に、当該リンクKが環状交差点5を形成する環状交差点リンクであるか否かの情報が含まれている構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、ノードNの情報(ノード属性)として、当該ノードNが環状交差点5を形成する環状交差点ノードであるか否かの情報が含まれている構成とすることができる。このような構成では、推定自車位置EPが環状交差点ノード或いは当該環状交差点ノード近傍の座標範囲内に到達したか否かに基づき、推定自車位置EPが環状交差点5内にあるか否かを判定する構成とすることができる。
【0092】
(8)上記の実施形態において説明した機能部の割り当ては単なる一例であり、複数の機能部を組み合わせたり、1つの機能部をさらに区分けしたりすることも可能である。
【0093】
(9)上記の実施形態では、本発明に係る自車位置認識システムを、ナビゲーション装置1に適用した場合を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、本発明に係る自車位置認識システムを、車両100に備えられるナビゲーション装置以外の装置(走行制御装置等)に適用することも可能である。
【0094】
(10)上記の実施形態では、自車位置認識ユニット3や道路地図データベース12が車両100に備えられる構成を例として説明したが、自車位置認識ユニット3の少なくとも一部の機能部や道路地図データベース12が、車両100の外部に設けられ、インターネット等の通信ネットワークを介して情報や信号の送受信が行われる構成とすることもできる。
【0095】
(11)その他の構成に関しても、本明細書において開示された実施形態は全ての点で例示であって、本発明の実施形態はこれに限定されない。すなわち、本願の特許請求の範囲に記載された構成及びこれと均等な構成を備えている限り、特許請求の範囲に記載されていない構成の一部を適宜改変した構成も、当然に本発明の技術的範囲に属する。
【産業上の利用可能性】
【0096】
本発明は、自車両の推定位置である推定自車位置を取得する推定自車位置取得部と、自車両の進行方位を取得する進行方位取得部と、道路の延在方位に関する情報を含む道路情報を取得する道路情報取得部と、路面の撮影画像を取得する路面画像取得部と、を備えた自車位置認識システム、自車両の推定位置である推定自車位置を取得する推定自車位置取得機能と、自車両の進行方位を取得する進行方位取得機能と、道路の延在方位に関する情報を含む道路情報を取得する道路情報取得機能と、路面の撮影画像を取得する路面画像取得機能と、を実現させるための自車位置認識プログラム、及び、自車両の推定位置である推定自車位置を取得する推定自車位置取得ステップと、自車両の進行方位を取得する進行方位取得ステップと、道路の延在方位に関する情報を含む道路情報を取得する道路情報取得ステップと、路面の撮影画像を取得する路面画像取得ステップと、を備えた自車位置認識方法に好適に利用することができる。
【符号の説明】
【0097】
5:環状交差点
31:推定自車位置取得部
32:進行方位取得部
33:路面画像取得部
34:道路情報取得部
41:通常自車位置補正部
42:地物利用自車位置補正部
43:画像認識部
44:基準方位特定部
51:環状道路
100:車両(自車両)
ED:延在方位
EP:推定自車位置
M:道路標示(対象地物)
MD:進行方位
P0:地物方位一致位置
RD:相対方位
RI:道路情報
SD:基準方位
【特許請求の範囲】
【請求項1】
自車両の推定位置である推定自車位置を取得する推定自車位置取得部と、自車両の進行方位を取得する進行方位取得部と、道路の延在方位に関する情報を含む道路情報を取得する道路情報取得部と、路面の撮影画像を取得する路面画像取得部と、を備えた自車位置認識システムであって、
道路の延在方位に平行な方位を基準方位として設けられた路面上の地物を対象地物として、前記撮影画像に含まれる前記対象地物の画像認識処理を行う画像認識部と、
前記画像認識部により認識された前記対象地物と自車両との相対方位と、自車両の進行方位とに基づき、前記対象地物の前記基準方位を特定する基準方位特定部と、
前記推定自車位置の周辺の前記道路情報に基づき、前記基準方位特定部により特定された前記基準方位と延在方位が一致する道路上の位置である地物方位一致位置を検出し、当該地物方位一致位置に基づき前記推定自車位置を補正する地物利用自車位置補正部と、
を備えた自車位置認識システム。
【請求項2】
前記推定自車位置の周辺の前記道路情報に含まれる道路の延在方位と自車両の進行方位とに基づき前記推定自車位置を補正する通常自車位置補正部を更に備え、
少なくとも前記推定自車位置が環状道路を有する交差点である環状交差点内にある場合に、前記地物利用自車位置補正部による前記推定自車位置の補正を行う請求項1に記載の自車位置認識システム。
【請求項3】
路面に直交する軸を中心とする180度未満の回転対称性を有さない形状の路面上の地物を前記対象地物とする請求項1又は2に記載の自車位置認識システム。
【請求項4】
道路の延在方位に対して平行な直線成分、及び道路の延在方位に対して直交する直線成分の少なくとも何れかを有する形状の路面上の地物を前記対象地物とする請求項1から3のいずれか一項に記載の自車位置認識システム。
【請求項5】
前記地物利用自車位置補正部は、前記画像認識部により認識された前記対象地物と自車両との距離にも基づいて前記推定自車位置を補正する請求項1から4のいずれか一項に記載の自車位置認識システム。
【請求項6】
自車両の推定位置である推定自車位置を取得する推定自車位置取得機能と、自車両の進行方位を取得する進行方位取得機能と、道路の延在方位に関する情報を含む道路情報を取得する道路情報取得機能と、路面の撮影画像を取得する路面画像取得機能と、を実現させるための自車位置認識プログラムであって、
道路の延在方位に平行な方位を基準方位として設けられた路面上の地物を対象地物として、前記撮影画像に含まれる前記対象地物の画像認識処理を行う画像認識機能と、
前記画像認識機能により認識された前記対象地物と自車両との相対方位と、自車両の進行方位とに基づき、前記対象地物の前記基準方位を特定する基準方位特定機能と、
前記推定自車位置の周辺の前記道路情報に基づき、前記基準方位特定機能により特定された前記基準方位と延在方位が一致する道路上の位置である地物方位一致位置を検出し、当該地物方位一致位置に基づき前記推定自車位置を補正する地物利用自車位置補正機能と、
をコンピュータに実現させるための自車位置認識プログラム。
【請求項7】
自車両の推定位置である推定自車位置を取得する推定自車位置取得ステップと、自車両の進行方位を取得する進行方位取得ステップと、道路の延在方位に関する情報を含む道路情報を取得する道路情報取得ステップと、路面の撮影画像を取得する路面画像取得ステップと、を備えた自車位置認識方法であって、
道路の延在方位に平行な方位を基準方位として設けられた路面上の地物を対象地物として、前記撮影画像に含まれる前記対象地物の画像認識処理を行う画像認識ステップと、
前記画像認識ステップにて認識された前記対象地物と自車両との相対方位と、自車両の進行方位とに基づき、前記対象地物の前記基準方位を特定する基準方位特定ステップと、
前記推定自車位置の周辺の前記道路情報に基づき、前記基準方位特定ステップにて特定された前記基準方位と延在方位が一致する道路上の位置である地物方位一致位置を検出する地物方位一致位置検出ステップと、
前記地物方位一致位置検出ステップにて検出された前記地物方位一致位置に基づき前記推定自車位置を補正する地物利用自車位置補正ステップと、
を備える自車位置認識方法。
【請求項1】
自車両の推定位置である推定自車位置を取得する推定自車位置取得部と、自車両の進行方位を取得する進行方位取得部と、道路の延在方位に関する情報を含む道路情報を取得する道路情報取得部と、路面の撮影画像を取得する路面画像取得部と、を備えた自車位置認識システムであって、
道路の延在方位に平行な方位を基準方位として設けられた路面上の地物を対象地物として、前記撮影画像に含まれる前記対象地物の画像認識処理を行う画像認識部と、
前記画像認識部により認識された前記対象地物と自車両との相対方位と、自車両の進行方位とに基づき、前記対象地物の前記基準方位を特定する基準方位特定部と、
前記推定自車位置の周辺の前記道路情報に基づき、前記基準方位特定部により特定された前記基準方位と延在方位が一致する道路上の位置である地物方位一致位置を検出し、当該地物方位一致位置に基づき前記推定自車位置を補正する地物利用自車位置補正部と、
を備えた自車位置認識システム。
【請求項2】
前記推定自車位置の周辺の前記道路情報に含まれる道路の延在方位と自車両の進行方位とに基づき前記推定自車位置を補正する通常自車位置補正部を更に備え、
少なくとも前記推定自車位置が環状道路を有する交差点である環状交差点内にある場合に、前記地物利用自車位置補正部による前記推定自車位置の補正を行う請求項1に記載の自車位置認識システム。
【請求項3】
路面に直交する軸を中心とする180度未満の回転対称性を有さない形状の路面上の地物を前記対象地物とする請求項1又は2に記載の自車位置認識システム。
【請求項4】
道路の延在方位に対して平行な直線成分、及び道路の延在方位に対して直交する直線成分の少なくとも何れかを有する形状の路面上の地物を前記対象地物とする請求項1から3のいずれか一項に記載の自車位置認識システム。
【請求項5】
前記地物利用自車位置補正部は、前記画像認識部により認識された前記対象地物と自車両との距離にも基づいて前記推定自車位置を補正する請求項1から4のいずれか一項に記載の自車位置認識システム。
【請求項6】
自車両の推定位置である推定自車位置を取得する推定自車位置取得機能と、自車両の進行方位を取得する進行方位取得機能と、道路の延在方位に関する情報を含む道路情報を取得する道路情報取得機能と、路面の撮影画像を取得する路面画像取得機能と、を実現させるための自車位置認識プログラムであって、
道路の延在方位に平行な方位を基準方位として設けられた路面上の地物を対象地物として、前記撮影画像に含まれる前記対象地物の画像認識処理を行う画像認識機能と、
前記画像認識機能により認識された前記対象地物と自車両との相対方位と、自車両の進行方位とに基づき、前記対象地物の前記基準方位を特定する基準方位特定機能と、
前記推定自車位置の周辺の前記道路情報に基づき、前記基準方位特定機能により特定された前記基準方位と延在方位が一致する道路上の位置である地物方位一致位置を検出し、当該地物方位一致位置に基づき前記推定自車位置を補正する地物利用自車位置補正機能と、
をコンピュータに実現させるための自車位置認識プログラム。
【請求項7】
自車両の推定位置である推定自車位置を取得する推定自車位置取得ステップと、自車両の進行方位を取得する進行方位取得ステップと、道路の延在方位に関する情報を含む道路情報を取得する道路情報取得ステップと、路面の撮影画像を取得する路面画像取得ステップと、を備えた自車位置認識方法であって、
道路の延在方位に平行な方位を基準方位として設けられた路面上の地物を対象地物として、前記撮影画像に含まれる前記対象地物の画像認識処理を行う画像認識ステップと、
前記画像認識ステップにて認識された前記対象地物と自車両との相対方位と、自車両の進行方位とに基づき、前記対象地物の前記基準方位を特定する基準方位特定ステップと、
前記推定自車位置の周辺の前記道路情報に基づき、前記基準方位特定ステップにて特定された前記基準方位と延在方位が一致する道路上の位置である地物方位一致位置を検出する地物方位一致位置検出ステップと、
前記地物方位一致位置検出ステップにて検出された前記地物方位一致位置に基づき前記推定自車位置を補正する地物利用自車位置補正ステップと、
を備える自車位置認識方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−122760(P2012−122760A)
【公開日】平成24年6月28日(2012.6.28)
【国際特許分類】
【出願番号】特願2010−271622(P2010−271622)
【出願日】平成22年12月6日(2010.12.6)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成24年6月28日(2012.6.28)
【国際特許分類】
【出願日】平成22年12月6日(2010.12.6)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]