
自車位置認識システム、自車位置認識プログラム、及び自車位置認識方法
【課題】複数の地物で構成された地物群について、画像認識処理における認識対象を決定するための認識率を適切に決定することが可能な技術を実現する。
【解決手段】単一の地物又は予め定められた複数の地物で構成された地物群を認識地物単位として、画像認識に成功する割合である認識率を、地物の種別毎に予め定められた予想認識率ERに基づき認識地物単位毎に決定する認識率決定部26と、認識地物単位のそれぞれの認識率に基づいて、画像認識処理において認識対象とする認識地物単位を選択する認識対象選択部25と、を備え、認識率決定部26は、道路幅方向に分かれて配置された地物群からなる特定認識地物単位については、当該特定認識地物単位を構成する地物の予想認識率ERに基づき定まる暫定認識率を、当該特定認識地物単位を構成する複数の地物の道路幅方向の配置形態に応じた補正係数Cにより補正して、認識率を決定する。
【解決手段】単一の地物又は予め定められた複数の地物で構成された地物群を認識地物単位として、画像認識に成功する割合である認識率を、地物の種別毎に予め定められた予想認識率ERに基づき認識地物単位毎に決定する認識率決定部26と、認識地物単位のそれぞれの認識率に基づいて、画像認識処理において認識対象とする認識地物単位を選択する認識対象選択部25と、を備え、認識率決定部26は、道路幅方向に分かれて配置された地物群からなる特定認識地物単位については、当該特定認識地物単位を構成する地物の予想認識率ERに基づき定まる暫定認識率を、当該特定認識地物単位を構成する複数の地物の道路幅方向の配置形態に応じた補正係数Cにより補正して、認識率を決定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自車両に備えられたカメラによる撮影画像を用いて自車位置を認識する自車位置認識システム、自車位置認識プログラム、及び自車位置認識方法に関する。
【背景技術】
【0002】
上記のような自車位置認識システムの従来技術として、例えば特開2009−58429号公報(特許文献1)に記載された技術がある。特許文献1には、カメラによる撮影画像に含まれる地物の画像認識処理を行い、画像認識の結果と当該地物の位置情報とに基づき、推定自車位置を補正する技術が記載されている。この際、画像認識処理において認識対象とされる地物は、各地物の画像認識に成功する割合である認識率に基づいて決定される。具体的には、認識対象となり得る複数の地物が狭い間隔で配置されている場合に、認識率が高い地物を認識対象の地物として決定する。これにより、画像認識処理に係る演算負荷を軽減しつつ、一定距離あたりの地物の認識率を高めることが可能となっている。
【0003】
ところで、例えば特開2009−109341号公報(特許文献2)に記載されているように、複数の地物(特許文献2の例では一対の横断歩道標示)で構成された地物群を画像認識処理における認識対象とする技術が知られている。しかしながら、特許文献1には、このような地物群を認識対象とする場合についての記載がなく、当然ながら、画像認識処理における認識対象を決定するための地物群に対する認識率の決定方法に言及した記載もない。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−58429号公報
【特許文献2】特開2009−109341号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
そこで、複数の地物で構成された地物群について、画像認識処理における認識対象を決定するための認識率を適切に決定することが可能な技術の実現が望まれる。
【課題を解決するための手段】
【0006】
本発明に係る、自車両の推定位置である推定自車位置を取得する推定自車位置取得部と、前記自車両に備えられたカメラにより撮影された撮影画像を取得し、当該撮影画像に含まれる地物の画像認識処理を行う画像処理部と、地物の位置情報を含む道路情報を取得する道路情報取得部と、前記画像認識処理による地物の認識結果と前記道路情報に含まれる地物の位置情報とに基づき前記推定自車位置を補正する推定自車位置補正部と、を備えた自車位置認識システムの特徴構成は、単一の地物又は予め定められた複数の地物で構成された地物群を認識地物単位として、画像認識に成功する割合である認識率を、地物の種別毎に予め定められた予想認識率に基づき前記認識地物単位毎に決定する認識率決定部と、前記認識地物単位のそれぞれの認識率に基づいて、複数の前記認識地物単位の中から前記画像認識処理において認識対象とする前記認識地物単位を選択する認識対象選択部と、を備え、前記認識率決定部は、道路幅方向に分かれて配置された地物群からなる前記認識地物単位である特定認識地物単位については、当該特定認識地物単位を構成する地物の前記予想認識率に基づき定まる暫定認識率を、当該特定認識地物単位を構成する複数の地物の道路幅方向の配置形態に応じた補正係数により補正して、前記認識率を決定する点にある。
【0007】
上記の特徴構成によれば、道路幅方向に分かれて配置された地物群からなる特定認識地物単位の認識率を、当該特定認識地物単位を構成する複数の地物のそれぞれの形態(形状等)に応じて定まる暫定認識率を基準としつつ、補正係数による補正を行って決定することができる。この際、補正係数に関係する配置形態の方向は、車両の通常走行時における進行方向に直交する方向である道路幅方向であり、この道路幅方向は、カメラによる撮影画像中の認識対象の地物の位置や大きさに与える影響の大きい方向であり、また、当該撮影画像中への他の地物の含まれやすさに与える影響の大きい方向でもある。上記の構成では、このような方向の配置形態を考慮して暫定認識率を補正することができるため、暫定認識率をそのまま特定認識地物単位の認識率として決定する場合に比べ、認識率を適切に決定することが可能となる。すなわち、複数の地物で構成された地物群について、画像認識処理における認識対象を決定するための認識率を適切に決定することが可能となる。
【0008】
ここで、前記配置形態は、自車線の幅、道路幅、又は前記特定認識地物単位を構成する複数の地物間の道路幅方向の距離の何れかである形態特徴量に応じて定まり、前記形態特徴量は前記道路情報に含まれ、前記補正係数は、前記形態特徴量が大きくなるに従って前記認識率を低くするように補正する値とされると好適である。
【0009】
この構成によれば、形態特徴量が大きくなると、特定認識地物単位を構成する少なくとも一部の地物についての画像認識の成功率が低くなる傾向があることを考慮して、そのような場合の特定認識地物単位の認識率を低く設定することができる。
なお、このような傾向があることは、以下の理由による。すなわち、道路上や道路周辺に設けられる地物は、一般的に、車線の幅や道路幅に対して所定の位置関係で設けられる場合が多い。そのため、特定認識地物単位が設けられている道路では、車線の幅や道路幅が広くなると、一般的に、特定認識地物単位を構成する複数の地物間の道路幅方向の距離も長くなる。よって、形態特徴量が、自車線の幅、道路幅、又は特定認識地物単位を構成する複数の地物間の道路幅方向の距離のいずれであっても、形態特徴量が大きくなるに従って、少なくとも一部の地物について、カメラによる撮影画像中における中央部からの距離が長くなり、或いは、カメラによる撮影画像中での大きさが小さくなり、結果、当該地物についての画像認識の成功率が一般的に低下する。
【0010】
また、前記配置形態は、前記特定認識地物単位を構成する複数の地物の道路幅方向の間に他の地物が存在するか否かに応じて定まり、前記他の地物が存在する場合の前記補正係数が、当該他の地物が存在しない場合の前記補正係数に比べて前記認識率を低くするように補正する値とされると好適である。
【0011】
特定認識地物単位を構成する複数の地物の道路幅方向の間に他の地物が存在すると、当該他の地物がカメラによる撮影画像中に含まれる可能性が高くなる。このため、特定認識地物単位を構成する少なくとも一部の地物が、他の形状の地物と誤認識されやすくなる可能性がある。この構成によれば、このことを考慮して、上記他の地物が存在する場合の特定認識地物単位の認識率を低く設定することができる。
【0012】
また、前記暫定認識率は、前記特定認識地物単位を構成する複数の地物のそれぞれの前記予想認識率を互いに乗算した値であり、前記認識率は、前記暫定認識率に前記補正係数を乗算した値であると好適である。
【0013】
この構成によれば、暫定認識率や認識率を簡素な構成で導出することができるため、必要に応じてこれらを演算して導出する場合に、当該演算に係る負荷を低減することができる。また、暫定認識率や認識率を予め演算して記憶装置に整備しておく場合には、当該整備に係るコストを低減することができる。
【0014】
以上の各構成を備えた本発明に係る自車位置認識システムの技術的特徴は、自車位置認識プログラムや自車位置認識方法にも適用可能であり、本発明はそのようなプログラムや方法も権利の対象とすることができる。
【0015】
その場合における、自車位置認識プログラムの特徴構成は、自車両の推定位置である推定自車位置を取得する推定自車位置取得機能と、前記自車両に備えられたカメラにより撮影された撮影画像を取得し、当該撮影画像に含まれる地物の画像認識処理を行う画像処理機能と、地物の位置情報を含む道路情報を取得する道路情報取得機能と、前記画像認識処理による地物の認識結果と前記道路情報に含まれる地物の位置情報とに基づき前記推定自車位置を補正する推定自車位置補正機能と、を実現させるための自車位置認識プログラムであって、単一の地物又は予め定められた複数の地物で構成された地物群を認識地物単位として、画像認識に成功する割合である認識率を、地物の種別毎に予め定められた予想認識率に基づき前記認識地物単位毎に決定する認識率決定機能と、前記認識地物単位のそれぞれの認識率に基づいて、複数の前記認識地物単位の中から前記画像認識処理において認識対象とする前記認識地物単位を選択する認識対象選択機能と、をコンピュータに実現させ、前記認識率決定機能は、道路幅方向に分かれて配置された地物群からなる前記認識地物単位である特定認識地物単位については、当該特定認識地物単位を構成する地物の前記予想認識率に基づき定まる暫定認識率を、当該特定認識地物単位を構成する複数の地物の道路幅方向の配置形態に応じた補正係数により補正して、前記認識率を決定する機能である点にある。
【0016】
また、自車位置認識方法の特徴構成は、自車両の推定位置である推定自車位置を取得する推定自車位置取得ステップと、前記自車両に備えられたカメラにより撮影された撮影画像を取得し、当該撮影画像に含まれる地物の画像認識処理を行う画像処理ステップと、地物の位置情報を含む道路情報を取得する道路情報取得ステップと、前記画像認識処理による地物の認識結果と前記道路情報に含まれる地物の位置情報とに基づき前記推定自車位置を補正する推定自車位置補正ステップと、を備えた自車位置認識方法であって、単一の地物又は予め定められた複数の地物で構成された地物群を認識地物単位として、画像認識に成功する割合である認識率を、地物の種別毎に予め定められた予想認識率に基づき前記認識地物単位毎に決定する認識率決定ステップと、前記認識地物単位のそれぞれの認識率に基づいて、複数の前記認識地物単位の中から前記画像認識処理において認識対象とする前記認識地物単位を選択する認識対象選択ステップと、を備え、前記認識率決定ステップでは、道路幅方向に分かれて配置された地物群からなる前記認識地物単位である特定認識地物単位については、当該特定認識地物単位を構成する地物の前記予想認識率に基づき定まる暫定認識率を、当該特定認識地物単位を構成する複数の地物の道路幅方向の配置形態に応じた補正係数により補正して、前記認識率を決定する点にある。
【0017】
当然ながら、これらの自車位置認識プログラムや自車位置認識方法も上述した自車位置認識システムに係る作用効果を得ることができ、更に、その好適な構成の例として挙げたいくつかの付加的技術を組み込むことが可能である。
【図面の簡単な説明】
【0018】
【図1】本発明の実施形態に係るナビゲーション装置の概略構成を示す模式図である。
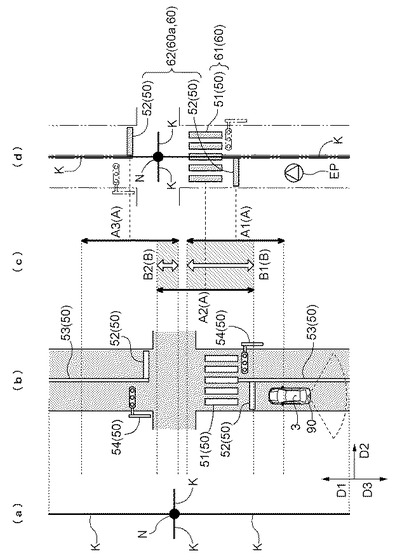
【図2】本発明の実施形態に係る車両の走行状況の一例を示す模式図であり、(a)はノードとリンクが表す道路ネットワークを示し、(b)は(a)に対応する道路及び当該道路に設けられた地物を示し、(c)は認識範囲及び重複領域を示し、(d)は(b)に対応する道路における車両側で認識されている自車位置を示す。
【図3】本発明の実施形態に係る地物の配置形態の一例を示す模式図である。
【図4】本発明の実施形態に係る地物の配置形態の別の一例を示す模式図である。
【図5】本発明の実施形態に係る予想認識率記憶部に記憶されている情報の一例を示す概念図である。
【図6】本発明の実施形態に係る補正係数記憶部に記憶されている情報の一例を示す概念図である。
【図7】本発明の実施形態に係る認識地物単位探索処理の手順の一例を示すフローチャートである。
【図8】本発明の実施形態に係る認識対象選択処理の手順の一例を示すフローチャートである。
【図9】本発明の実施形態に係る自車位置認識処理の手順の一例を示すフローチャートである。
【発明を実施するための形態】
【0019】
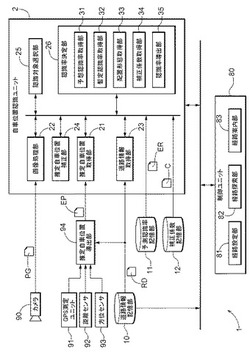
本発明の実施形態について、図面を参照して説明する。ここでは、本発明に係る自車位置認識システムを、車載用のナビゲーション装置に適用した場合を例として説明する。本実施形態に係るナビゲーション装置1は、図1に示すように自車位置認識ユニット2を備え、この自車位置認識ユニット2を中核として自車位置認識システムが構築されている。
【0020】
以下の説明における「進行方向D1」及び「反進行方向D3」(図2参照)は、自車両3(以下、「車両3」という場合がある。)の前進走行時を基準として定義している。よって、「進行方向D1」は車両3の前方へ向かう方向を指し、「反進行方向D3」は車両3の後方へ向かう方向を指す。
【0021】
1.ナビゲーション装置の概略構成
図1に示すように、ナビゲーション装置1は、自車位置認識ユニット2と、制御ユニット80と、推定自車位置導出部94と、道路情報記憶部10と、予想認識率記憶部11と、補正係数記憶部12と、を備えている。自車位置認識ユニット2及び制御ユニット80は、複数の機能部を備えている。
【0022】
ナビゲーション装置1が備える各機能部は、互いに共通の或いはそれぞれ独立のCPU等の演算処理装置を中核部材として、入力されたデータに対して種々の処理を行うための機能部がハードウェア又はソフトウェア(プログラム)或いはその両方により実装されて構成されている。また、これらの機能部は、通信線を介して互いに情報の受け渡しを行うことができるように構成されているとともに、各記憶部10〜12からデータを抽出可能に構成されている。ここで、各機能部がソフトウェア(プログラム)により構成される場合には、当該ソフトウェアは、演算処理装置が参照可能な記憶装置に記憶される。
【0023】
道路情報記憶部10、予想認識率記憶部11、及び補正係数記憶部12は、記憶装置により構成されるデータベースである。この記憶装置は、例えば、ハードディスクドライブやフラッシュメモリ等のように、情報を記憶及び書き換え可能な記録媒体をハードウェア構成として備える。なお、各記憶部10〜12は、それぞれ独立のハードウェアを有していても良いし、共通のハードウェアに備えられていても良い。
【0024】
制御ユニット80は、経路設定部81、経路探索部82、及び経路案内部83を備えている。経路設定部81は、例えば自車位置等の出発地、入力された目的地、通過地点や走行条件(高速道路の使用有無など)を設定する機能部である。経路探索部82は、経路設定部81によって設定された条件に基づき、出発地から目的地までの案内経路を探索するための演算処理(経路探索処理)を行う機能部である。経路案内部83は、経路探索部82により探索された出発地から目的地までの経路に従って、モニタ(図示せず)の表示画面による案内標示やスピーカ(図示せず)による音声案内等により、運転者に対して適切な経路案内を行うための演算処理(経路案内処理)を行う機能部である。
【0025】
道路情報記憶部10には、上記の経路探索処理や経路案内処理を実行する際や、モニタへの地図表示処理を実行する際等に参照される道路情報RD(道路地図データ)が記憶(格納)されている。本実施形態では、道路情報RDは、図2(a)に概念的に示すように、緯度及び経度で表現された地図上の位置情報を有する多数のノードNの情報と、2つのノードNを連結して道路に対応する経路を構成する多数のリンクKの情報とを有して構成されている。ノードNは、例えば、道路の交差点、折曲点、分岐点等に設定される。
【0026】
道路情報RDには、各リンクKのリンク情報(リンク属性)として、道路種別情報(高速道路、有料道路、国道、県道等の種別)やリンク長さ情報等が含まれている。また、道路情報RDには、2つのノードNの間(すなわちリンクK上)に配置されてリンクKの詳細形状を表す形状補間点の情報や、道路幅W2(図3、図4参照)の情報も含まれている。道路幅W2の情報は、例えば、道路幅W2を数値で直接的に表した情報や、道路幅W2をレーン数により間接的に表した情報とされる。
【0027】
また、道路情報RDには、道路上や道路周辺に設けられた各種の地物50の情報(地物情報)が含まれている。道路情報記憶部10に地物情報が格納される地物50には、道路標示が含まれるとともに、道路との相対位置が固定されている立体的な構造物も含まれる。ここで、道路標示とは、ペイント等により路面に設けられた規制や指示のための記号や文字である。道路標示には、例えば、横断歩道であることを示す標示(横断歩道標示51、図2(b)参照)、停止線を表す標示(停止線標示52、図2(b)参照)、区画線(中央線や車線境界線(レーンマーク)等)を表す標示(区画線標示53、図2(b)参照)、前方に横断歩道があることを示す標示(横断歩道予告標示)、交差点の形状を示す十字状やT字状の標示(交差点形状標示)等が含まれる。また、立体的な構造物には、例えば、分離帯、縁石、側溝等のような車線を形成するための立体物に加えて、信号機54(図2(b)参照)、標識、陸橋、トンネル等の各種立体物が含まれる。
【0028】
地物情報には、少なくとも地物50の位置情報と属性情報とが含まれる。ここで、位置情報は、地物50の地図上の位置(緯度及び経度)を表す情報であり、基本的に、地物50の代表点(例えば地物50の長さ方向及び幅方向の中心)の位置を表す情報とされる。また、属性情報は、地物50の属性を表す情報であり、本例では、属性情報には種別情報と形態情報とが含まれている。種別情報は、地物50の種別を表す情報であり、基本的に、同じ形状の地物50が1つの種別として規定されている。本実施形態では、地物50の種別には、図5に示すように、「横断歩道標示」、「停止線標示」、及び「信号機」が含まれ、更に、「区画線標示」も含まれる。また、形態情報は、地物50の形態を表す情報であり、地物50の形状や大きさ等の情報を有している。
【0029】
上記のような道路情報RDは、データベース化され、道路情報記憶部10の仕様に応じた形態で格納されている。例えば、道路情報RDが、互いに関連付けられた複数のレイヤに分かれて道路情報記憶部10に格納された構成とすることができる。具体的には、ノードNとリンクKにより道路間の接続情報を示すレイヤ(道路ネットワークレイヤ)、形状補間点や道路幅W2の情報を示すレイヤ(道路形状レイヤ)、及び、道路に関する詳細な情報(道路上や道路周辺に設けられた各種地物50の情報等)を示すレイヤ(道路属性レイヤ)を含む少なくとも3つのレイヤに分かれて道路情報RDが備えられた構成とすることができる。
【0030】
推定自車位置導出部94は、車両3に備えられたGPS測定ユニット91、距離センサ92、及び方位センサ93の出力に基づき、自車両3の推定位置である推定自車位置EPを導出する機能部である。具体的には、推定自車位置導出部94は、GPS測定ユニット91から取得したGPS(Global Positioning System)信号を解析し、自車両3の現在位置(緯度及び経度)を導出し、GPS位置データを得る。また、推定自車位置導出部94は、距離センサ92や方位センサ93から取得した移動距離情報と方位情報とに基づいて推測航法位置を導出し、推測航法位置データを得る。そして、推定自車位置導出部94は、GPS位置データと推測航法位置データとから公知の方法により自車両3の推定位置である推定自車位置EPを導出する演算を行い、導出した推定自車位置EPの情報を自車位置認識ユニット2へ出力する。
【0031】
上記のように導出される推定自車位置EPは、測定誤差を含んだ情報となっており、場合によっては道路上から外れてしまう。本実施形態では、このような場合には道路情報記憶部10に記憶された道路地図データに基づき、推定自車位置導出部94が推定自車位置EPを道路地図に示される道路上に合わせるための補正(マップマッチング処理)を行い、当該補正後の推定自車位置EPの情報が自車位置認識ユニット2へ出力される。
【0032】
自車位置認識ユニット2は、推定自車位置導出部94から取得した推定自車位置EPを補正するための各機能部22〜26を備えている。自車位置認識ユニット2の構成については、後の「2.自車位置認識ユニットの構成」の項で詳細に説明するが、自車位置認識ユニット2は、車両3に備えられたカメラ90(図1、図2参照)による撮影画像PGを用いて推定自車位置EPを補正することで、推定自車位置EPよりも高精度に自車位置を認識することが可能となっている。
【0033】
本実施形態では、図2(b)に示すように、カメラ90は車両3の後方を撮影するバックカメラ(リアカメラ)とされ、カメラ90による撮影画像PGには車両3の後方(反進行方向D3側)の路面が含まれる。具体的には、本実施形態では、カメラ90は主に路面が撮影されるように光軸に俯角(例えば30度程度)を有して車両3に設置されており、推定自車位置EPの補正のための画像認識において対象となる地物50は、路面に設けられた道路標示とされる。また、本実施形態では、カメラ90は、路面に直交する方向に見て、光軸が車両3の前後方向と平行になるように設置されている。
【0034】
2.自車位置認識ユニットの構成
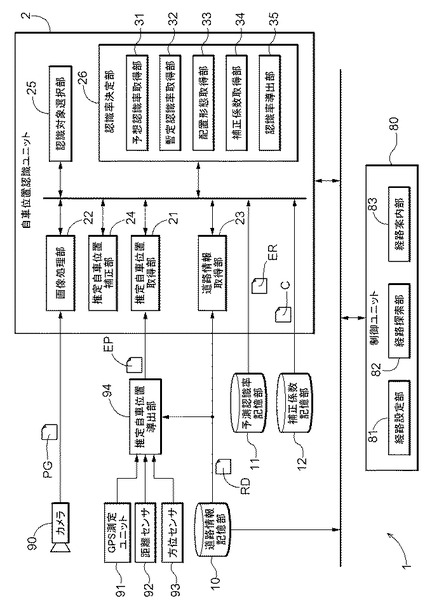
次に、本発明の要部である自車位置認識ユニット2の構成について説明する。図1に示すように、自車位置認識ユニット2は、推定自車位置取得部21、画像処理部22、道路情報取得部23、推定自車位置補正部24、認識対象選択部25、及び認識率決定部26を備えている。
【0035】
2−1.推定自車位置取得部の構成
推定自車位置取得部21は、自車両3の推定位置である推定自車位置EPを取得する機能部である。本実施形態では、推定自車位置導出部94が導出した推定自車位置EPが推定自車位置取得部21に入力されることで、推定自車位置取得部21が推定自車位置EPを取得する。
【0036】
2−2.画像処理部の構成
画像処理部22は、車両3に備えられたカメラ90により撮影された撮影画像PGを取得し、当該撮影画像PGに含まれる地物50の画像認識処理を行う機能部である。すなわち、画像処理部22は、画像取得機能と画像認識機能とを有している。画像処理部22は、図6に一例を示すような認識地物単位60を認識対象として画像認識処理を行う。ここで、認識地物単位60は、単一の地物50、又は予め定められた複数の地物50で構成された地物群(地物セット)である。図6に示す例では、第一認識地物単位61及び第三認識地物単位63のそれぞれが、単一の地物50で構成されている。一方、第二認識地物単位62及び第四認識地物単位64のそれぞれは、互いに異なる位置に配置された複数の地物50からなる地物群で構成されている。
【0037】
具体的には、第一認識地物単位61は、単一の横断歩道標示51で構成され、第三認識地物単位63は、単一の停止線標示52で構成されている。また、第二認識地物単位62及び第四認識地物単位64のそれぞれは、同一種別の複数(本例では2つ)の地物50からなる地物群で構成されており、具体的には、第二認識地物単位62は、2つの停止線標示52からなる地物群で構成され、第四認識地物単位64は、2つの信号機54からなる地物群で構成されている。
【0038】
なお、認識地物単位60は、画像認識が成功した場合に少なくとも進行方向D1に沿う方向の位置を特定することが可能な形態の地物50により構成される。そのため、区画線標示53(図2(b)参照)のような進行方向D1に沿って連続的に或いは断続的に設けられる地物50は、基本的に、認識地物単位60を構成しない。また、各地物50は、基本的に単独で認識地物単位60を構成するが、図2に示す2つの停止線標示52や2つの信号機54のように、進行方向D1に沿った方向に近接して配置された同一種別の複数の地物50(地物群)については、誤認識を抑制すべく、当該複数の地物50をセットとして1つの認識地物単位60が構成されるように、認識地物単位60の形成規則が定められている。ここで、「近接して配置」とは、進行方向D1に沿う方向の間隔が所定距離以下であること、或いは、地物群が占める進行方向D1に沿う方向の幅が所定距離以下であることを意味する。この所定距離は、推定自車位置EPに含まれ得る誤差の最大値に基づき設定することができ、例えば、10メートル以上であって100メートル以下の範囲内の値とすることができる。
【0039】
画像処理部22の画像認識処理において認識対象とされる認識地物単位60は、後述する認識対象選択部25により選択される。そして、画像処理部22は、認識対象の当該認識地物単位60を構成する地物50(すなわち、認識対象の地物50)について設定された認識範囲A(図2参照)内の撮影画像PGを取得し、認識対象の地物50の画像認識を行う。ここで、認識範囲A内の撮影画像PGは、本実施形態では、推定自車位置EPが当該認識範囲Aに含まれる状態でカメラ90により撮影された撮影画像PGとされる。なお、推定自車位置EPと車両3へのカメラ90の設置形態(取付位置、取付角度、画角等)とに基づき定まる、撮影画像PGにおける進行方向D1側の端部に相当する位置(すなわち、当該端部に写っている位置)が、認識範囲Aに含まれる撮影画像PGを、当該認識範囲A内の撮影画像PGとすることもできる。
【0040】
そして、画像処理部22は、認識対象の認識地物単位60を構成する全て(単一又は複数)の地物50の画像認識に成功した場合に、当該認識地物単位60の画像認識に成功したと判定し、判定結果の情報を推定自車位置補正部24へ出力する。画像処理部22による画像認識処理は、例えば、撮影画像PGから取得される輪郭情報と、道路情報RDに含まれる認識対象の地物50の形態情報とに基づくパターンマッチング(テンプレートマッチング)手法を用いて行う構成とすることができる。
【0041】
ところで、上記の認識範囲Aは、図2に示すように、地物50のそれぞれに対して個別に設定されるリンクKに沿った方向(進行方向D1に沿った方向)の範囲であり、各地物50の位置情報に基づき設定される。この認識範囲Aの大きさは、リンクKに沿った方向の推定自車位置EPの誤差を考慮して設定すると好適であり、例えば、認識範囲Aの大きさを、推定自車位置EPに含まれ得る誤差の最大値の2倍或いは2倍以上の値に設定することができる。このような認識範囲Aを設定することで、認識対象の地物50の現実の位置(進行方向D1に沿う方向の位置)を、高い確率で認識範囲A内に収めることが可能となっている。この点に関して、以下、図2を参照して説明する。
【0042】
図2(b)は、道路の実際の状態を表す図であり、車両3の道路上の位置は現実の位置として表している。図2(a)は、図2(b)に示す道路に対応する道路情報RDを示している。一方、図2(d)は、図2(b)で示す道路において、推定自車位置EPに基づき車両3側で認識されている地図データ上の自車位置を示しており、この例では、推定自車位置EPに含まれる誤差により、推定自車位置EPが車両3の現実の位置(図2(b))に対して反進行方向D3側にずれている。なお、図2(d)においては、説明の都合上、推定自車位置EPが図2(b)の車両3と同じ進行方向D1の位置となるように、道路情報RDを進行方向D1側にずらして示している。
【0043】
このような場合、推定自車位置EP及び道路情報RD(具体的には地物50の位置情報)に基づき車両3側で特定される各地物50の位置は、図2(d)に示すように、現実の位置(図2(b))に対して進行方向D1側にずれる。この際、認識範囲Aの大きさを適切に設定することで、推定自車位置EPに基づき設定される認識範囲A内に、対応する地物50の現実の位置が含まれるようにすることができる。
【0044】
図2に示す例では、横断歩道標示51に対して反進行方向D3側の停止線標示52の現実の位置が、当該停止線標示52について設定された第一認識範囲A1に含まれ、横断歩道標示51の現実の位置が、当該横断歩道標示51について設定された第二認識範囲A2に含まれ、横断歩道標示51に対して進行方向D1側の停止線標示52の現実の位置が、当該停止線標示52について設定された第三認識範囲A3に含まれている。
【0045】
なお、カメラ90による所定の時間間隔毎の撮影画像PGは、図示しないバッファメモリに一時的に記憶される。画像処理部22は、認識対象の地物50についての認識範囲A内の撮影画像PGをこのバッファメモリから取得し、当該地物50の画像認識を行う。なお、認識範囲Aの大きさは、例えば、推定自車位置EPに含まれ得る誤差等に基づき設定された固定値とすることができ、また、車速や推定自車位置補正部24による前回の補正からの走行距離等に応じて可変に設定される構成とすることもできる。なお、図2に示す例では、認識範囲Aは、進行方向D1に沿った方向の中央部に対応する地物50が位置するように設定されている。
【0046】
2−3.道路情報取得部の構成
道路情報取得部23は、地物50の位置情報を含む道路情報RDを取得する機能部である。本実施形態では、道路情報取得部23は、道路情報RDを道路情報記憶部10から抽出して取得し、道路情報取得部23が取得した道路情報RDは、認識対象選択部25による認識地物単位60の選択処理、認識率決定部26による認識率決定処理、推定自車位置補正部24による推定自車位置補正処理を含む、自車位置認識ユニット2で実行される各種処理において利用される。
【0047】
道路情報取得部23は、道路情報記憶部10に位置情報が記憶されている複数の認識地物単位60の中から、認識対象選択部25による選択の対象となり得る認識地物単位60(すなわち、選択候補の認識地物単位60)の地物情報(具体的には、当該認識地物単位60を構成する各地物50の地物情報)を取得する。本実施形態では、道路情報取得部23は、推定自車位置取得部21が取得した推定自車位置EPに基づき車両3に対して前方(進行方向D1側)に所定の探索範囲を設定し、当該探索範囲内に存在する選択候補の認識地物単位60の地物情報を取得する。この地物情報の取得は、少なくとも推定自車位置EPが当該選択候補の認識地物単位60についての認識範囲A内に進入するまでの間に行われる。
【0048】
ここで、選択候補の認識地物単位60は、予め存在位置が把握されている認識地物単位60であって、将来的に撮影される撮影画像PGに画像認識が可能な状態で含まれ得る形態の認識地物単位60とされる。本実施形態では、上記のように、カメラ90は主に車両後方の路面を撮影するため、信号機54のような立体的な地物50の画像認識は現実的に困難である。そのため、図2に示す例では、図2(d)に示すように、第一認識地物単位61及び第二認識地物単位62が選択候補の認識地物単位60となる。
【0049】
なお、本実施形態では、各地物50についての認識地物単位60の情報が予め道路情報記憶部10に記憶されているが、道路情報取得部23が、道路情報記憶部10に記憶されている各地物50の地物情報と認識地物単位60の形成規則とに基づき、上記探索範囲内に存在する地物50の地物情報を取得する毎に、当該地物50についての認識地物単位60を設定する構成とすることもできる。
【0050】
2−4.認識対象選択部の構成
認識対象選択部25は、認識地物単位60のそれぞれの認識率Rに基づいて、複数の認識地物単位60の中から、画像処理部22の画像認識処理において認識対象とする認識地物単位60を選択する機能部である。なお、認識率Rは、認識地物単位60の画像認識に成功する割合を表す指標(成功率の推定値)であり、後述する認識率決定部26により決定される。本実施形態では、認識対象選択部25は、道路情報取得部23が地物情報を取得した選択候補の認識地物単位60の中から、認識対象とする認識地物単位60を選択する。
【0051】
そして、本実施形態では、選択候補の認識地物単位60が複数ある場合に、図2(c)に示すように、認識範囲A同士が重複する重複領域B内の撮影画像PGについては、複数(本例では2つ)の認識地物単位60の中から1つの認識地物単位60を選択して、当該認識地物単位60を構成する地物50の画像認識を行う。この際、認識率Rが最も高い認識地物単位60が選択される。また、認識範囲Aに重複領域Bが含まれる場合であっても、当該認識範囲Aに他の認識範囲Aと重複しない非重複領域がある場合、当該非重複領域内の撮影画像PGについては、認識対象選択部25により選択された認識地物単位60であるか否かにかかわらず、当該非重複領域に対応する地物50の画像認識を行う。図示は省略するが、認識範囲Aに重複領域Bが含まれない場合、当該認識範囲A内の撮影画像PGについては、当該認識範囲Aに対応する地物50の画像認識を行う。
【0052】
よって、図2に示す例では、第一認識地物単位61の認識率Rが第二認識地物単位62の認識率Rより高い場合、第二認識範囲A2内の撮影画像PGについては、横断歩道標示51を対象地物として画像認識が行われ、第一認識範囲A1における第一重複領域B1を除く領域内の撮影画像PG、及び第三認識範囲A3における第二重複領域B2を除く領域内の撮影画像PGについては、停止線標示52を対象地物として画像認識が行われる。逆に、第一認識地物単位61の認識率Rが第二認識地物単位62の認識率Rより低い場合、第一認識範囲A1内の撮影画像PG、及び第三認識範囲A3内の撮影画像PGについては、停止線標示52を対象地物として画像認識が行われ、第二認識範囲A2における第一重複領域B1及び第二重複領域B2を除く領域内の撮影画像PGについては、横断歩道標示51を対象地物として画像認識が行われる。
【0053】
2−5.推定自車位置補正部の構成
推定自車位置補正部24は、画像処理部22の画像認識処理による地物50(認識地物単位60)の認識結果と道路情報RDに含まれる地物50の位置情報とに基づき、推定自車位置EPを補正する機能部である。すなわち、推定自車位置補正部24は、画像処理部22による認識地物単位60の画像認識が成功した場合に、当該認識地物単位60を構成する地物50の位置情報を用いて、推定自車位置EPを補正する。本例では、推定自車位置補正部24は、推定自車位置EPの補正を、少なくとも進行方向D1に沿った方向において行う。
【0054】
具体的には、推定自車位置補正部24は、車両3へのカメラ90の設置形態に基づき、認識地物単位60の画像認識に成功した撮影画像PGの取得時における、自車両3と当該認識地物単位60との位置関係を演算する。この際、撮影画像PG中における認識地物単位60の位置や大きさ等が考慮される。推定自車位置補正部24は、上記位置関係の演算結果と、道路情報取得部23が取得した道路情報RDに含まれる認識地物単位60の地物情報(具体的には位置情報)とに基づく演算により、当該地物情報に基づく高精度の自車位置(地物依拠自車位置)を取得する。
【0055】
なお、カメラ90の設定形態によっては、認識地物単位60の画像認識に成功した撮影画像PGの取得時における自車両3の位置を、当該認識地物単位60の位置と同一視することも可能である。この場合、上記の地物依拠自車位置は、当該認識地物単位60の位置と同一とされる。また、画像認識に成功した認識地物単位60が複数の地物50の群で構成される場合には、例えば、最も進行方向D1側に位置する地物50の位置情報のみを用いて上記の地物依拠自車位置を取得する構成とすることができ、また、複数の地物50のそれぞれについて導出される地物依拠自車位置の平均値を、最終的な地物依拠自車位置とすることもできる。
【0056】
そして、推定自車位置補正部24は、取得した地物依拠自車位置を推定自車位置EPと置き換えることで、推定自車位置EPの補正を行う。なお、単に位置を置き換えるのではなく、認識地物単位60の画像認識に成功した撮影画像PGの撮影時からの走行距離(距離センサ92から取得可能)を考慮して自車位置の調整を行う構成とすることも可能である。
【0057】
2−6.認識率決定部の構成
認識率決定部26は、画像認識に成功する割合である認識率Rを、地物50の種別毎に予め定められた予想認識率ERに基づき認識地物単位60毎に決定する機能部である。このような機能を実現すべく、認識率決定部26は、本例では、予想認識率取得部31、暫定認識率取得部32、配置形態取得部33、補正係数取得部34、及び認識率導出部35を備えている。
【0058】
2−6−1.予想認識率取得部の構成
予想認識率取得部31は、認識地物単位60を構成する各地物50の予想認識率ERを取得する機能部である。本実施形態では、予想認識率ERは、地物種別と関連付けられて予想認識率記憶部11に記憶されており、予想認識率取得部31は、予想認識率記憶部11から予想認識率ERを抽出して取得する。
【0059】
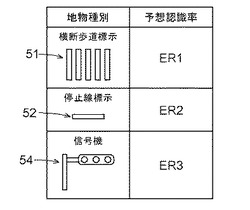
ここで、予想認識率ERは、地物50の種別毎に予め定められた、画像認識の平均的な成功率(成功確率)を表し、0以上であって1以下の値に設定される。本実施形態では、予想認識率ERは、地物種別に応じた地物50の形態や配置傾向等によって、地物種別毎に一意に決定されている。図5に示す例では、横断歩道標示51、停止線標示52、及び信号機54のそれぞれの予想認識率ERが、「ER1」、「ER2」、及び「ER3」に設定されている。例えば、「ER1」を「0.6」とし、「ER2」を「0.8」とすることができる。
【0060】
2−6−2.暫定認識率取得部の構成
暫定認識率取得部32は、認識地物単位60を構成する地物50の予想認識率ERに基づき定まる暫定認識率TRを取得する機能部である。本実施形態では、暫定認識率取得部32は、予想認識率取得部31が取得した予想認識率ERに基づき演算を行い、認識地物単位60の暫定認識率TRを取得する。
【0061】
具体的には、暫定認識率取得部32は、認識地物単位60を構成する複数の地物50のそれぞれの予想認識率ERを互いに乗算することで、暫定認識率TRを導出する。すなわち、暫定認識率TRは、認識地物単位60を構成する複数の地物50のそれぞれの予想認識率ERを互いに乗算した値とされ、当該認識地物単位60を構成する地物50の種別及び個数に基づき一意に定まる。図6に示す例では、第一認識地物単位61の暫定認識率TRは「ER1」となり、第二認識地物単位62の暫定認識率TRは「ER2×ER2」となり、第三認識地物単位63の暫定認識率TRは「ER2」となり、第四認識地物単位64の暫定認識率TRは「ER3×ER3」となる。このように、認識地物単位60が1つの地物50により構成される場合には、当該地物50の予想認識率ERがそのまま暫定認識率TRとなる。
【0062】
2−6−3.配置形態取得部の構成
配置形態取得部33は、認識地物単位60を構成する地物50についての配置形態を取得する機能部である。この「配置形態」は、特定の認識地物単位60である特定認識地物単位60aの認識率Rを適切に補正するための指標であり、この配置形態に応じた補正係数Cにより、暫定認識率TRが補正される。なお、「補正」には、結果として暫定認識率TRと同じ値が認識率Rとして決定される場合も含む。また、本実施形態では、特定認識地物単位60aを含む全ての認識地物単位60について、配置形態に応じた補正係数Cに基づき認識率Rが決定される。
【0063】
ここで、「特定認識地物単位60a」とは、道路幅方向D2に分かれて配置された地物群からなる認識地物単位60である。具体的には、特定認識地物単位60aは、自車両3が走行中の車線である自車線と、当該自車線に隣接する車線(例えば対向車線)との境界部の両側に分かれて配置された同一種別の複数の地物50により構成される。図2に示す例では、第二認識地物単位62が、同一種別の2つの地物50(具体的には停止線標示52)により構成された特定認識地物単位60aとなる。また、上述したように、本実施形態では、認識対象選択部25による選択の対象とはならないが、図2に示す道路においては、一対の信号機54が構成する第四認識地物単位64(図6参照)も、同一種別の2つの地物50(具体的には信号機54)により構成された特定認識地物単位60aとなり得る。
【0064】
また、図2に示す例では、特定認識地物単位60aとしての第二認識地物単位62を構成する複数(本例では2つ)の地物50(停止線標示52)は、他の地物50(横断歩道標示51や区画線標示53)を挟んだ両側に設けられているとともに、交差点(ノードN)を挟んだ両側に設けられている。また、これら複数の地物50は、進行方向D1に沿った方向に近接して配置されているとともに、隣接する車線に分かれて配置されている。
【0065】
ところで、このように道路幅方向D2に分かれて配置された地物群からなる特定認識地物単位60aを画像認識の対象とする場合、画像認識の成功率は、一般的に、当該特定認識地物単位60aを構成する複数の地物50の道路幅方向D2の配置形態に依存する。この点について、図3及び図4を参照して説明する。
【0066】
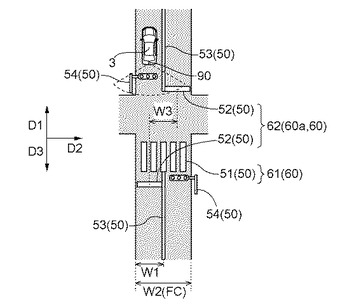
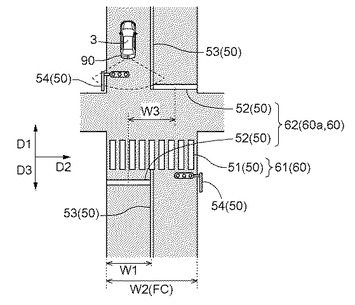
図3は図2(b)と同じ道路を示し、図4は、図3に示す道路の道路幅W2を広くしたものに相当する。ここで、特定認識地物単位60aとしての第二認識地物単位62が画像認識の対象である場合を想定すると、図3と図4との比較から明らかなように、道路幅W2が大きくなるに従って、自車線に隣接する車線(本例では対向車線)に設けられている停止線標示52の画像認識の成功率が一般的に低下することが分かる。これは、道路幅方向D2が、車両3の進行方向D1に直交する方向であるとともに、カメラ90の光軸に交差(本例では直交)する方向であるためである。そこで、本実施形態では、配置形態を定める形態特徴量FCとして道路幅W2を考慮し、暫定認識率TRを補正するための補正係数Cを、道路幅W2が大きくなるに従って認識率Rを低くするように補正する値に設定している。
【0067】
また、図3から分かるように、特定認識地物単位60aを構成する複数の地物50(本例では一対の停止線標示52)の道路幅方向D2の間に他の地物50(本例では区画線標示53)が存在すると、別の種別の地物50との間で形状の区別がつきにくくなり、特定認識地物単位60aに対する画像認識の成功率が一般的に低下することが分かる。そこで、本実施形態では、配置形態として更に特定認識地物単位60aを構成する複数の地物50の道路幅方向D2の間に他の地物50(以下、単に「介在地物」という場合がある。)が存在するか否かを考慮し、介在地物が存在する場合の補正係数Cを、当該介在地物が存在しない場合の補正係数Cに比べて認識率Rを低くするように補正する値に設定している。
【0068】
上記のように、本実施形態では、配置形態を定める情報として、形態特徴量FCとしての道路幅W2の情報と、介在地物(図3、図4に示す例では区画線標示53)の有無の情報とを考慮する。そのため、本実施形態では、配置形態取得部33は、道路幅W2の情報と介在地物の有無の情報とを、道路情報記憶部10を介して道路情報記憶部10から取得する。
【0069】
2−6−4.補正係数取得部の構成
補正係数取得部34は、配置形態取得部33が取得した配置形態の情報に基づき補正係数Cを取得する機能部である。本実施形態では、補正係数Cは、認識地物単位60の種別に関連付けられるとともに配置形態にも関連付けられて補正係数記憶部12に記憶されており、補正係数取得部34は、補正係数記憶部12から補正係数Cを抽出して取得する。本実施形態では、補正係数Cは0以上であって1以下の値とされ、後述するように、補正係数Cの値が小さくなるほど認識率導出部35により導出される認識率Rが低くなる。なお、補正係数Cは、予め定められた固定値とすることも、地物情報等に基づいて可変に設定される可変値とすることも可能である。
【0070】
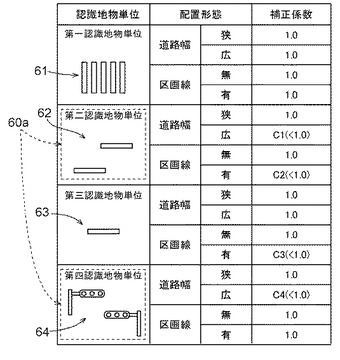
図6は、配置形態として道路幅W2(形態特徴量FCの一例)及び区画線標示53(介在地物の一例)の有無に関連付けられた補正係数Cの一例を示す。この例では、特定認識地物単位60aではない第一認識地物単位61については、配置形態によらずに暫定認識率TRの値をそのまま認識率Rとすべく、補正係数Cが全ての配置形態について「1」に設定されている。
【0071】
第一認識地物単位61と同様に特定認識地物単位60aではない第三認識地物単位63についても、補正係数Cは基本的に「1」に設定される。しかし、停止線標示52と区画線標示53とは互いに延在方向が直交するため、第三認識地物単位63については、区画線標示53が有る場合に、別の種別の地物50(例えば十字状やT字状の交差点形状標示等)との間で形状の区別がつきにくくなる。そのため、本例では、第三認識地物単位63についての区画線標示53が有る場合の補正係数Cである第三補正係数C3を、「1」より小さい値に設定している。
【0072】
特定認識地物単位60aである第二認識地物単位62については、基本的に、配置形態に応じて補正係数Cが異なる値に設定される。図6に示す例では、道路幅W2を所定の基準幅に比べて広い場合と狭い場合との2つの場合に分類し、道路幅W2が広い場合の補正係数Cである第一補正係数C1を、道路幅W2が狭い場合の補正係数C(本例では「1」)よりも小さい値に設定している。また、区画線標示53が有る場合の補正係数Cである第二補正係数C2を、区画線標示53が無い場合の補正係数C(本例では「1」)よりも小さい値に設定している。第一補正係数C1や第二補正係数C2は、例えば「0.7」とすることができる。なお、道路幅W2が狭い場合の補正係数Cや、区画線標示53が無い場合の補正係数Cを、「1」より小さい値に設定することも可能である。
【0073】
第二認識地物単位62と同様に特定認識地物単位60aである第四認識地物単位64についても、基本的に、配置形態に応じて補正係数Cが異なる値に設定される。しかし、信号機54は、画像認識において路面と容易に区別可能な高さに配置されるため、信号機54と区画線標示53とを区別することは一般的に容易である。そのため、本例では、第四認識地物単位64についての区画線標示53が有る場合の補正係数Cは「1」とし、道路幅W2が広い場合の補正係数Cである第四補正係数C4のみを、「1」より小さい値に設定している。
【0074】
2−6−5.認識率導出部の構成
認識率導出部35は、暫定認識率TRと補正係数Cとに基づき、認識地物単位60の認識率Rを導出する機能部である。本実施形態では、暫定認識率TRに補正係数Cを乗算することで、認識率Rを導出する。すなわち、認識率Rは、暫定認識率TRに補正係数Cを乗算した値とされる。これにより、認識率導出部35により導出される特定認識地物単位60aについての認識率Rは、暫定認識率TRを、当該特定認識地物単位60aを構成する複数の地物50の道路幅方向D2の配置形態に応じた補正係数Cにより補正した値とされる。
【0075】
本実施形態では、図6に示すように、配置形態として道路幅W2(形態特徴量FCの一例)と区画線標示53(介在地物の一例)の有無との2つが考慮されるため、認識率Rの導出に際しては、道路幅W2に応じて選択される補正係数Cと、区画線標示53の有無に応じて選択される補正係数Cとの双方を暫定認識率TRに乗算して認識率Rを導出する。例えば、道路幅W2が広く区画線標示53がある場合の第二認識地物単位62の認識率Rは、「ER2×ER2×C1×C2」として導出される。
【0076】
3.動作処理の手順
次に、図7〜図9を参照して、本実施形態に係る自車位置認識ユニット2において実行される自車位置認識処理の手順、すなわち、自車位置認識方法について説明する。以下に説明する自車位置認識処理の手順は、上記のナビゲーション装置1(自車位置認識ユニット2)の各機能部を構成するハードウェア又はソフトウェア(プログラム)或いはその両方により実行される。上記の各機能部がプログラムにより構成される場合には、ナビゲーション装置1が有する演算処理装置が、上記の各機能部を構成するプログラムを実行するコンピュータとして動作する。
【0077】
なお、図7は、道路情報取得部23により実行される、認識対象選択部25による選択の対象となり得る認識地物単位60(選択候補の認識地物単位60)を探索する認識地物単位探索処理の手順を示すフローチャートであり、図8は、図7のステップ#04の認識対象選択処理の手順を示すフローチャートである。また、図9は、図7に示す認識地物単位探索処理の結果に基づき実行される自車位置認識処理の手順を示すフローチャートである。図7及び図9のそれぞれの処理は、所定のタイミングで繰り返し実行されるとともに、並行に実行される。
【0078】
3−1.認識地物単位探索処理の手順
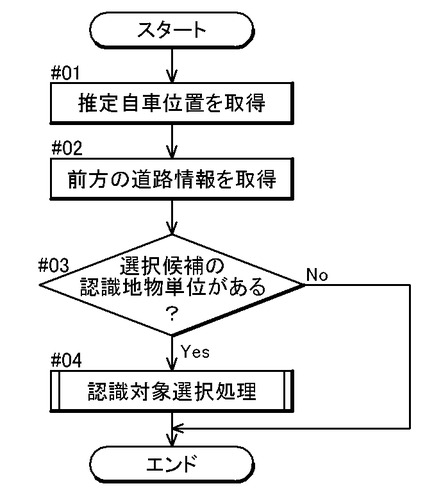
図7に示すように、推定自車位置取得部21により推定自車位置EPが取得されると(ステップ#01)、道路情報取得部23は、当該推定自車位置EPに基づき車両3の前方に設定される探索範囲内の道路情報RDを取得し、当該探索範囲内において認識対象選択部25による選択の対象となり得る選択候補の認識地物単位60の探索を行う(ステップ#02)。そして、探索範囲内に選択候補の認識地物単位60があった場合には(ステップ#03:Yes)、図8に基づき後に説明する認識対象選択処理を実行する(ステップ#04)。一方、探索範囲内に選択候補の認識地物単位60がなかった場合には(ステップ#03:No)、処理は終了する。
【0079】
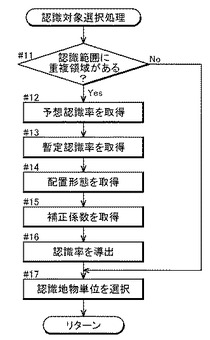
3−2.認識対象選択処理の手順
図8に示すように、認識対象選択部25は、まず、選択候補の認識地物単位60のそれぞれの認識範囲Aの情報に基づき、認識範囲A同士が重複する重複領域Bがあるか否かの判定を行う(ステップ#11)。なお、認識範囲Aの情報は、道路情報記憶部10に記憶された道路情報RDに基づき取得される。認識範囲Aに重複領域Bがある場合には(ステップ#11:Yes)、予想認識率ERの取得(ステップ#12)、暫定認識率TRの取得(ステップ#13)、配置形態の取得(ステップ#14)、補正係数Cの取得(ステップ#15)、認識率Rの導出(ステップ#16)の各処理が順に実行されて各認識地物単位60についての認識率Rが決定され、処理はステップ17に進む。なお、ステップ#12〜ステップ#15の各処理の順序は、適宜入れ替えることが可能である。一方、認識範囲Aに重複領域Bがない場合には(ステップ#11:No)、処理は直接ステップ#17に進む。
【0080】
認識地物単位60の選択処理(ステップ#17)では、ステップ#11において重複領域Bがあると判定されていた場合には、認識率Rが最も高い認識地物単位60を、認識対象の認識地物単位60として選択する。一方、ステップ#11において重複領域Bがないと判定されていた場合には、図7のステップ#03で探索された選択候補の認識地物単位60をそのまま、認識対象の認識地物単位60として選択する。
【0081】
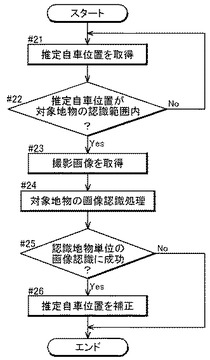
3−3.自車位置認識処理の手順
図9に示すように、推定自車位置取得部21により推定自車位置EPが取得されると(ステップ#21)、当該推定自車位置EPが対象地物の認識範囲A内に位置するか否かの判定が実行される(ステップ#22)。ここで、「対象地物」は、図7のステップ#03で探索された認識地物単位60を構成する地物50であり、図2に示す例では、横断歩道標示51及び一対の停止線標示52である(図2(d)参照)。
【0082】
推定自車位置EPが何れかの対象地物の認識範囲A内である場合には(ステップ#22:Yes)、当該認識範囲A内の撮影画像PGが取得され(ステップ#23)、対象地物の画像認識処理が実行される(ステップ#24)。ステップ#24の処理では、ステップ#23で取得された撮影画像PGが重複領域B(図2に示す例では第一重複領域B1又は第二重複領域B2)内の撮影画像PGである場合には、図8のステップ#17で選択された認識地物単位60を構成する地物50を対象地物として、画像認識処理を実行する。なお、本実施形態では、上述したように、重複領域Bを含む認識範囲Aについて、当該認識範囲Aにおける重複領域Bを除く領域内の撮影画像PGについては、図8のステップ#17で選択された認識地物単位60であるか否かにかかわらず、当該認識範囲Aに対応する地物50を対象地物として、画像認識処理を実行する。
【0083】
そして、認識地物単位60の画像認識に成功した場合、すなわち、認識地物単位60を構成する全て(単一又は複数)の地物50の画像認識に成功した場合には(ステップ#25:Yes)、当該認識地物単位60を構成する地物50の位置情報を用いて推定自車位置EPを補正する(ステップ#26)。一方、認識地物単位60の画像認識に成功していない場合(認識地物単位60を構成する一部の地物50のみの画像認識に成功している状態を含む)には(ステップ#25:No)、処理は終了し、ステップ#21からの処理が再度実行される。
【0084】
4.その他の実施形態
最後に、本発明に係る自車位置認識システムの、その他の実施形態について説明する。なお、以下のそれぞれの実施形態で開示される構成は、矛盾が生じない限り、他の実施形態で開示される構成と組み合わせて適用することが可能である。
【0085】
(1)上記の実施形態では、配置形態を定める形態特徴量FCが道路幅W2である構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、形態特徴量FCを、自車線の幅である車線幅W1(図3、図4参照)、又は特定認識地物単位60aを構成する複数の地物50間の道路幅方向D2の距離である地物間距離W3(図3、図4参照)とすることができる。このような構成においても、図3と図4との比較から明らかなように、車線幅W1や地物間距離W3が大きくなるに従って、特定認識地物単位60aに対する画像認識の成功率が一般的に低下することが分かる。よって、このような構成においても、上記の実施形態と同様、補正係数Cが、当該形態特徴量FCが大きくなるに従って認識率Rを低くするように補正する値とすると良い。この際、車線幅W1や地物間距離W3を特定するための情報が、道路情報RDに含まれた構成とすることができる。
【0086】
(2)上記の実施形態では、配置形態を定める情報として、形態特徴量FC(具体的には道路幅W2)の情報と、特定認識地物単位60aを構成する複数の地物50の道路幅方向D2の間に他の地物50が存在するか否かの情報との双方が考慮される構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、配置形態を定める情報として、何れか一方のみ(例えば形態特徴量FCのみ)の情報が考慮される構成とすることもできる。
【0087】
(3)上記の実施形態では、推定自車位置EPの補正のための画像認識において対象となる地物50が、路面に設けられた道路標示である構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、信号機54のような立体的な地物50を、推定自車位置EPの補正のために利用することも可能である。この場合、車両3へのカメラ90の設置形態は、当該立体的な地物50の画像認識が可能となるように設定される。
【0088】
(4)上記の実施形態では、選択候補の認識地物単位60のそれぞれの認識範囲A同士が重複する場合に、認識対象選択部25により選択されなかった認識地物単位60についても、当該認識地物単位60についての認識範囲Aに他の認識範囲Aと重複しない非重複領域がある場合には、当該非重複領域内の撮影画像PGに対して画像認識が実行される構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、認識対象選択部25により選択されなかった認識地物単位60については、何れの領域についても画像認識を実行しない構成とすることもできる。
【0089】
(5)上記の実施形態では、選択候補の認識地物単位60のそれぞれの認識範囲A同士が重複する場合に、認識対象選択部25による認識地物単位60の選択が実行される構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、認識範囲Aが互いに重複しない複数の選択候補の認識地物単位60の間でも、認識地物単位60の選択が行われる構成とすることもできる。このような構成とすることで、所定の距離内において選択される認識地物単位60の個数を制限することができる。
【0090】
(6)上記の実施形態では、カメラ90が車両3の後方を撮影するバックカメラである構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、カメラ90が車両3の前方を撮影するフロントカメラや、車両3の側方を撮影するサイドカメラとされた構成とすることも可能である。
【0091】
(7)上記の実施形態では、形態特徴量FC(本例では道路幅W2)が2つの場合に分類される構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、形態特徴量FCを、3つの場合に分類する等、形態特徴量FCが3つ以上の場合に分類される構成とすることも、本発明の好適な実施形態の1つである。このような場合においても、形態特徴量FCが大きくなるに従って補正係数Cが小さく設定される構成とすると好適である。
【0092】
(8)上記の実施形態では、補正係数Cが、形態特徴量FCの大きさや介在地物の有無によって異なる値とされる構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、補正係数Cがその他の要因によっても調整される構成とすることもできる。このような要因として、画像認識の成功率に影響を与える各種の要因を考慮することができ、例えば、地物50のかすれの状態や、地物50に対する日照の状態(例えば日向と日陰のいずれに含まれるか等)、或いは気象条件や時刻等に応じて、異なる値の補正係数Cが用いられる構成とすることができる。このような要因に関する情報は、例えば、地物50の位置情報と同様に道路情報記憶部10に備えられ、当該道路情報記憶部10から取得される構成とすることができる。
【0093】
(9)上記の実施形態では、暫定認識率取得部32が予想認識率ERに基づく演算により暫定認識率TRを取得する構成を例として説明したが、予想認識率ERに基づき予め決定された暫定認識率TRが記憶装置に記憶されており、当該記憶装置を参照して暫定認識率取得部32が暫定認識率TRを取得する構成とすることもできる。また、地物50の種別及び個数と暫定認識率TRとの関係を規定した暫定認識率マップが記憶装置に記憶されており、暫定認識率取得部32が当該暫定認識率マップを参照して、認識地物単位60を構成する地物50の種別及び個数に基づき、対応する暫定認識率TRを取得する構成とすることもできる。
【0094】
(10)上記の実施形態では、認識率導出部35が、暫定認識率TRと補正係数Cとに基づく演算により認識率Rを導出する構成を例として説明したが、暫定認識率TR及び補正係数Cと認識率Rとの関係を規定した認識率マップが記憶装置に記憶されており、認識率導出部35が当該認識率マップを参照して、暫定認識率TRと補正係数Cとに基づき、対応する認識率Rを取得する構成とすることもできる。
【0095】
(11)上記の実施形態では、認識率Rが、暫定認識率TRに補正係数Cを乗算した値とされる構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、認識率Rが、暫定認識率TRに補正係数Cを除算した値とされる構成とすることもできる。この場合、補正係数Cの値が大きくなるほど認識率導出部35により導出される認識率Rが低くなる。また、認識率Rが、暫定認識率TRに補正係数Cを加算或いは減算した値とされる構成とすることも可能である。
【0096】
(12)上記の実施形態では、本発明に係る自車位置認識システムを車載用のナビゲーション装置1に適用した場合を例として説明したが、このようなナビゲーション装置1は、車両3に固定的に搭載されたものに限らず、任意に移動可能なポータブルナビゲーション装置であって、使用時にのみ車両3に持ち込まれるようなものであっても良い。
【0097】
(13)上記の実施形態では、本発明に係る自車位置認識システムをナビゲーション装置1に適用した場合を例として説明したが、本発明に係る自車位置認識システムを、車両に備えられるその他の装置(走行制御装置等)に適用することも可能である。
【0098】
(14)上記の実施形態において説明した機能部の割り当ては単なる一例であり、複数の機能部を組み合わせたり、1つの機能部をさらに区分けしたりすることも可能である。また、上記の実施形態では、自車位置認識ユニット2を構成する各機能部、及び各記憶部10〜12が車両3に備えられる構成を例として説明したが、自車位置認識ユニット2の少なくとも一部の機能部や、記憶部10〜12の少なくとも一部が、車両3の外部(例えばサーバ装置等)に設けられ、インターネット等の通信ネットワークを介して情報や信号の送受信が行われる構成とすることもできる。
【0099】
(15)その他の構成に関しても、本明細書において開示された実施形態は全ての点で例示であって、本発明の実施形態はこれに限定されない。すなわち、本願の特許請求の範囲に記載されていない構成に関しては、本発明の目的を逸脱しない範囲内で適宜改変することが可能である。
【産業上の利用可能性】
【0100】
本発明は、自車両に備えられたカメラによる撮影画像を用いて自車位置を認識する自車位置認識システム、自車位置認識プログラム、及び自車位置認識方法に好適に利用することができる。
【符号の説明】
【0101】
3:車両(自車両)
21:推定自車位置取得部
22:画像処理部
23:道路情報取得部
24:推定自車位置補正部
25:認識対象選択部
26:認識率決定部
50:地物
60:認識地物単位
60a:特定認識地物単位
90:カメラ
C:補正係数
EP:推定自車位置
ER:予想認識率
FC:形態特徴量
PG:撮影画像
RD:道路情報
W1:車線幅(自車線の幅)
W2:道路幅
W3:地物間距離(地物間の道路幅方向の距離)
D2:道路幅方向
【技術分野】
【0001】
本発明は、自車両に備えられたカメラによる撮影画像を用いて自車位置を認識する自車位置認識システム、自車位置認識プログラム、及び自車位置認識方法に関する。
【背景技術】
【0002】
上記のような自車位置認識システムの従来技術として、例えば特開2009−58429号公報(特許文献1)に記載された技術がある。特許文献1には、カメラによる撮影画像に含まれる地物の画像認識処理を行い、画像認識の結果と当該地物の位置情報とに基づき、推定自車位置を補正する技術が記載されている。この際、画像認識処理において認識対象とされる地物は、各地物の画像認識に成功する割合である認識率に基づいて決定される。具体的には、認識対象となり得る複数の地物が狭い間隔で配置されている場合に、認識率が高い地物を認識対象の地物として決定する。これにより、画像認識処理に係る演算負荷を軽減しつつ、一定距離あたりの地物の認識率を高めることが可能となっている。
【0003】
ところで、例えば特開2009−109341号公報(特許文献2)に記載されているように、複数の地物(特許文献2の例では一対の横断歩道標示)で構成された地物群を画像認識処理における認識対象とする技術が知られている。しかしながら、特許文献1には、このような地物群を認識対象とする場合についての記載がなく、当然ながら、画像認識処理における認識対象を決定するための地物群に対する認識率の決定方法に言及した記載もない。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−58429号公報
【特許文献2】特開2009−109341号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
そこで、複数の地物で構成された地物群について、画像認識処理における認識対象を決定するための認識率を適切に決定することが可能な技術の実現が望まれる。
【課題を解決するための手段】
【0006】
本発明に係る、自車両の推定位置である推定自車位置を取得する推定自車位置取得部と、前記自車両に備えられたカメラにより撮影された撮影画像を取得し、当該撮影画像に含まれる地物の画像認識処理を行う画像処理部と、地物の位置情報を含む道路情報を取得する道路情報取得部と、前記画像認識処理による地物の認識結果と前記道路情報に含まれる地物の位置情報とに基づき前記推定自車位置を補正する推定自車位置補正部と、を備えた自車位置認識システムの特徴構成は、単一の地物又は予め定められた複数の地物で構成された地物群を認識地物単位として、画像認識に成功する割合である認識率を、地物の種別毎に予め定められた予想認識率に基づき前記認識地物単位毎に決定する認識率決定部と、前記認識地物単位のそれぞれの認識率に基づいて、複数の前記認識地物単位の中から前記画像認識処理において認識対象とする前記認識地物単位を選択する認識対象選択部と、を備え、前記認識率決定部は、道路幅方向に分かれて配置された地物群からなる前記認識地物単位である特定認識地物単位については、当該特定認識地物単位を構成する地物の前記予想認識率に基づき定まる暫定認識率を、当該特定認識地物単位を構成する複数の地物の道路幅方向の配置形態に応じた補正係数により補正して、前記認識率を決定する点にある。
【0007】
上記の特徴構成によれば、道路幅方向に分かれて配置された地物群からなる特定認識地物単位の認識率を、当該特定認識地物単位を構成する複数の地物のそれぞれの形態(形状等)に応じて定まる暫定認識率を基準としつつ、補正係数による補正を行って決定することができる。この際、補正係数に関係する配置形態の方向は、車両の通常走行時における進行方向に直交する方向である道路幅方向であり、この道路幅方向は、カメラによる撮影画像中の認識対象の地物の位置や大きさに与える影響の大きい方向であり、また、当該撮影画像中への他の地物の含まれやすさに与える影響の大きい方向でもある。上記の構成では、このような方向の配置形態を考慮して暫定認識率を補正することができるため、暫定認識率をそのまま特定認識地物単位の認識率として決定する場合に比べ、認識率を適切に決定することが可能となる。すなわち、複数の地物で構成された地物群について、画像認識処理における認識対象を決定するための認識率を適切に決定することが可能となる。
【0008】
ここで、前記配置形態は、自車線の幅、道路幅、又は前記特定認識地物単位を構成する複数の地物間の道路幅方向の距離の何れかである形態特徴量に応じて定まり、前記形態特徴量は前記道路情報に含まれ、前記補正係数は、前記形態特徴量が大きくなるに従って前記認識率を低くするように補正する値とされると好適である。
【0009】
この構成によれば、形態特徴量が大きくなると、特定認識地物単位を構成する少なくとも一部の地物についての画像認識の成功率が低くなる傾向があることを考慮して、そのような場合の特定認識地物単位の認識率を低く設定することができる。
なお、このような傾向があることは、以下の理由による。すなわち、道路上や道路周辺に設けられる地物は、一般的に、車線の幅や道路幅に対して所定の位置関係で設けられる場合が多い。そのため、特定認識地物単位が設けられている道路では、車線の幅や道路幅が広くなると、一般的に、特定認識地物単位を構成する複数の地物間の道路幅方向の距離も長くなる。よって、形態特徴量が、自車線の幅、道路幅、又は特定認識地物単位を構成する複数の地物間の道路幅方向の距離のいずれであっても、形態特徴量が大きくなるに従って、少なくとも一部の地物について、カメラによる撮影画像中における中央部からの距離が長くなり、或いは、カメラによる撮影画像中での大きさが小さくなり、結果、当該地物についての画像認識の成功率が一般的に低下する。
【0010】
また、前記配置形態は、前記特定認識地物単位を構成する複数の地物の道路幅方向の間に他の地物が存在するか否かに応じて定まり、前記他の地物が存在する場合の前記補正係数が、当該他の地物が存在しない場合の前記補正係数に比べて前記認識率を低くするように補正する値とされると好適である。
【0011】
特定認識地物単位を構成する複数の地物の道路幅方向の間に他の地物が存在すると、当該他の地物がカメラによる撮影画像中に含まれる可能性が高くなる。このため、特定認識地物単位を構成する少なくとも一部の地物が、他の形状の地物と誤認識されやすくなる可能性がある。この構成によれば、このことを考慮して、上記他の地物が存在する場合の特定認識地物単位の認識率を低く設定することができる。
【0012】
また、前記暫定認識率は、前記特定認識地物単位を構成する複数の地物のそれぞれの前記予想認識率を互いに乗算した値であり、前記認識率は、前記暫定認識率に前記補正係数を乗算した値であると好適である。
【0013】
この構成によれば、暫定認識率や認識率を簡素な構成で導出することができるため、必要に応じてこれらを演算して導出する場合に、当該演算に係る負荷を低減することができる。また、暫定認識率や認識率を予め演算して記憶装置に整備しておく場合には、当該整備に係るコストを低減することができる。
【0014】
以上の各構成を備えた本発明に係る自車位置認識システムの技術的特徴は、自車位置認識プログラムや自車位置認識方法にも適用可能であり、本発明はそのようなプログラムや方法も権利の対象とすることができる。
【0015】
その場合における、自車位置認識プログラムの特徴構成は、自車両の推定位置である推定自車位置を取得する推定自車位置取得機能と、前記自車両に備えられたカメラにより撮影された撮影画像を取得し、当該撮影画像に含まれる地物の画像認識処理を行う画像処理機能と、地物の位置情報を含む道路情報を取得する道路情報取得機能と、前記画像認識処理による地物の認識結果と前記道路情報に含まれる地物の位置情報とに基づき前記推定自車位置を補正する推定自車位置補正機能と、を実現させるための自車位置認識プログラムであって、単一の地物又は予め定められた複数の地物で構成された地物群を認識地物単位として、画像認識に成功する割合である認識率を、地物の種別毎に予め定められた予想認識率に基づき前記認識地物単位毎に決定する認識率決定機能と、前記認識地物単位のそれぞれの認識率に基づいて、複数の前記認識地物単位の中から前記画像認識処理において認識対象とする前記認識地物単位を選択する認識対象選択機能と、をコンピュータに実現させ、前記認識率決定機能は、道路幅方向に分かれて配置された地物群からなる前記認識地物単位である特定認識地物単位については、当該特定認識地物単位を構成する地物の前記予想認識率に基づき定まる暫定認識率を、当該特定認識地物単位を構成する複数の地物の道路幅方向の配置形態に応じた補正係数により補正して、前記認識率を決定する機能である点にある。
【0016】
また、自車位置認識方法の特徴構成は、自車両の推定位置である推定自車位置を取得する推定自車位置取得ステップと、前記自車両に備えられたカメラにより撮影された撮影画像を取得し、当該撮影画像に含まれる地物の画像認識処理を行う画像処理ステップと、地物の位置情報を含む道路情報を取得する道路情報取得ステップと、前記画像認識処理による地物の認識結果と前記道路情報に含まれる地物の位置情報とに基づき前記推定自車位置を補正する推定自車位置補正ステップと、を備えた自車位置認識方法であって、単一の地物又は予め定められた複数の地物で構成された地物群を認識地物単位として、画像認識に成功する割合である認識率を、地物の種別毎に予め定められた予想認識率に基づき前記認識地物単位毎に決定する認識率決定ステップと、前記認識地物単位のそれぞれの認識率に基づいて、複数の前記認識地物単位の中から前記画像認識処理において認識対象とする前記認識地物単位を選択する認識対象選択ステップと、を備え、前記認識率決定ステップでは、道路幅方向に分かれて配置された地物群からなる前記認識地物単位である特定認識地物単位については、当該特定認識地物単位を構成する地物の前記予想認識率に基づき定まる暫定認識率を、当該特定認識地物単位を構成する複数の地物の道路幅方向の配置形態に応じた補正係数により補正して、前記認識率を決定する点にある。
【0017】
当然ながら、これらの自車位置認識プログラムや自車位置認識方法も上述した自車位置認識システムに係る作用効果を得ることができ、更に、その好適な構成の例として挙げたいくつかの付加的技術を組み込むことが可能である。
【図面の簡単な説明】
【0018】
【図1】本発明の実施形態に係るナビゲーション装置の概略構成を示す模式図である。
【図2】本発明の実施形態に係る車両の走行状況の一例を示す模式図であり、(a)はノードとリンクが表す道路ネットワークを示し、(b)は(a)に対応する道路及び当該道路に設けられた地物を示し、(c)は認識範囲及び重複領域を示し、(d)は(b)に対応する道路における車両側で認識されている自車位置を示す。
【図3】本発明の実施形態に係る地物の配置形態の一例を示す模式図である。
【図4】本発明の実施形態に係る地物の配置形態の別の一例を示す模式図である。
【図5】本発明の実施形態に係る予想認識率記憶部に記憶されている情報の一例を示す概念図である。
【図6】本発明の実施形態に係る補正係数記憶部に記憶されている情報の一例を示す概念図である。
【図7】本発明の実施形態に係る認識地物単位探索処理の手順の一例を示すフローチャートである。
【図8】本発明の実施形態に係る認識対象選択処理の手順の一例を示すフローチャートである。
【図9】本発明の実施形態に係る自車位置認識処理の手順の一例を示すフローチャートである。
【発明を実施するための形態】
【0019】
本発明の実施形態について、図面を参照して説明する。ここでは、本発明に係る自車位置認識システムを、車載用のナビゲーション装置に適用した場合を例として説明する。本実施形態に係るナビゲーション装置1は、図1に示すように自車位置認識ユニット2を備え、この自車位置認識ユニット2を中核として自車位置認識システムが構築されている。
【0020】
以下の説明における「進行方向D1」及び「反進行方向D3」(図2参照)は、自車両3(以下、「車両3」という場合がある。)の前進走行時を基準として定義している。よって、「進行方向D1」は車両3の前方へ向かう方向を指し、「反進行方向D3」は車両3の後方へ向かう方向を指す。
【0021】
1.ナビゲーション装置の概略構成
図1に示すように、ナビゲーション装置1は、自車位置認識ユニット2と、制御ユニット80と、推定自車位置導出部94と、道路情報記憶部10と、予想認識率記憶部11と、補正係数記憶部12と、を備えている。自車位置認識ユニット2及び制御ユニット80は、複数の機能部を備えている。
【0022】
ナビゲーション装置1が備える各機能部は、互いに共通の或いはそれぞれ独立のCPU等の演算処理装置を中核部材として、入力されたデータに対して種々の処理を行うための機能部がハードウェア又はソフトウェア(プログラム)或いはその両方により実装されて構成されている。また、これらの機能部は、通信線を介して互いに情報の受け渡しを行うことができるように構成されているとともに、各記憶部10〜12からデータを抽出可能に構成されている。ここで、各機能部がソフトウェア(プログラム)により構成される場合には、当該ソフトウェアは、演算処理装置が参照可能な記憶装置に記憶される。
【0023】
道路情報記憶部10、予想認識率記憶部11、及び補正係数記憶部12は、記憶装置により構成されるデータベースである。この記憶装置は、例えば、ハードディスクドライブやフラッシュメモリ等のように、情報を記憶及び書き換え可能な記録媒体をハードウェア構成として備える。なお、各記憶部10〜12は、それぞれ独立のハードウェアを有していても良いし、共通のハードウェアに備えられていても良い。
【0024】
制御ユニット80は、経路設定部81、経路探索部82、及び経路案内部83を備えている。経路設定部81は、例えば自車位置等の出発地、入力された目的地、通過地点や走行条件(高速道路の使用有無など)を設定する機能部である。経路探索部82は、経路設定部81によって設定された条件に基づき、出発地から目的地までの案内経路を探索するための演算処理(経路探索処理)を行う機能部である。経路案内部83は、経路探索部82により探索された出発地から目的地までの経路に従って、モニタ(図示せず)の表示画面による案内標示やスピーカ(図示せず)による音声案内等により、運転者に対して適切な経路案内を行うための演算処理(経路案内処理)を行う機能部である。
【0025】
道路情報記憶部10には、上記の経路探索処理や経路案内処理を実行する際や、モニタへの地図表示処理を実行する際等に参照される道路情報RD(道路地図データ)が記憶(格納)されている。本実施形態では、道路情報RDは、図2(a)に概念的に示すように、緯度及び経度で表現された地図上の位置情報を有する多数のノードNの情報と、2つのノードNを連結して道路に対応する経路を構成する多数のリンクKの情報とを有して構成されている。ノードNは、例えば、道路の交差点、折曲点、分岐点等に設定される。
【0026】
道路情報RDには、各リンクKのリンク情報(リンク属性)として、道路種別情報(高速道路、有料道路、国道、県道等の種別)やリンク長さ情報等が含まれている。また、道路情報RDには、2つのノードNの間(すなわちリンクK上)に配置されてリンクKの詳細形状を表す形状補間点の情報や、道路幅W2(図3、図4参照)の情報も含まれている。道路幅W2の情報は、例えば、道路幅W2を数値で直接的に表した情報や、道路幅W2をレーン数により間接的に表した情報とされる。
【0027】
また、道路情報RDには、道路上や道路周辺に設けられた各種の地物50の情報(地物情報)が含まれている。道路情報記憶部10に地物情報が格納される地物50には、道路標示が含まれるとともに、道路との相対位置が固定されている立体的な構造物も含まれる。ここで、道路標示とは、ペイント等により路面に設けられた規制や指示のための記号や文字である。道路標示には、例えば、横断歩道であることを示す標示(横断歩道標示51、図2(b)参照)、停止線を表す標示(停止線標示52、図2(b)参照)、区画線(中央線や車線境界線(レーンマーク)等)を表す標示(区画線標示53、図2(b)参照)、前方に横断歩道があることを示す標示(横断歩道予告標示)、交差点の形状を示す十字状やT字状の標示(交差点形状標示)等が含まれる。また、立体的な構造物には、例えば、分離帯、縁石、側溝等のような車線を形成するための立体物に加えて、信号機54(図2(b)参照)、標識、陸橋、トンネル等の各種立体物が含まれる。
【0028】
地物情報には、少なくとも地物50の位置情報と属性情報とが含まれる。ここで、位置情報は、地物50の地図上の位置(緯度及び経度)を表す情報であり、基本的に、地物50の代表点(例えば地物50の長さ方向及び幅方向の中心)の位置を表す情報とされる。また、属性情報は、地物50の属性を表す情報であり、本例では、属性情報には種別情報と形態情報とが含まれている。種別情報は、地物50の種別を表す情報であり、基本的に、同じ形状の地物50が1つの種別として規定されている。本実施形態では、地物50の種別には、図5に示すように、「横断歩道標示」、「停止線標示」、及び「信号機」が含まれ、更に、「区画線標示」も含まれる。また、形態情報は、地物50の形態を表す情報であり、地物50の形状や大きさ等の情報を有している。
【0029】
上記のような道路情報RDは、データベース化され、道路情報記憶部10の仕様に応じた形態で格納されている。例えば、道路情報RDが、互いに関連付けられた複数のレイヤに分かれて道路情報記憶部10に格納された構成とすることができる。具体的には、ノードNとリンクKにより道路間の接続情報を示すレイヤ(道路ネットワークレイヤ)、形状補間点や道路幅W2の情報を示すレイヤ(道路形状レイヤ)、及び、道路に関する詳細な情報(道路上や道路周辺に設けられた各種地物50の情報等)を示すレイヤ(道路属性レイヤ)を含む少なくとも3つのレイヤに分かれて道路情報RDが備えられた構成とすることができる。
【0030】
推定自車位置導出部94は、車両3に備えられたGPS測定ユニット91、距離センサ92、及び方位センサ93の出力に基づき、自車両3の推定位置である推定自車位置EPを導出する機能部である。具体的には、推定自車位置導出部94は、GPS測定ユニット91から取得したGPS(Global Positioning System)信号を解析し、自車両3の現在位置(緯度及び経度)を導出し、GPS位置データを得る。また、推定自車位置導出部94は、距離センサ92や方位センサ93から取得した移動距離情報と方位情報とに基づいて推測航法位置を導出し、推測航法位置データを得る。そして、推定自車位置導出部94は、GPS位置データと推測航法位置データとから公知の方法により自車両3の推定位置である推定自車位置EPを導出する演算を行い、導出した推定自車位置EPの情報を自車位置認識ユニット2へ出力する。
【0031】
上記のように導出される推定自車位置EPは、測定誤差を含んだ情報となっており、場合によっては道路上から外れてしまう。本実施形態では、このような場合には道路情報記憶部10に記憶された道路地図データに基づき、推定自車位置導出部94が推定自車位置EPを道路地図に示される道路上に合わせるための補正(マップマッチング処理)を行い、当該補正後の推定自車位置EPの情報が自車位置認識ユニット2へ出力される。
【0032】
自車位置認識ユニット2は、推定自車位置導出部94から取得した推定自車位置EPを補正するための各機能部22〜26を備えている。自車位置認識ユニット2の構成については、後の「2.自車位置認識ユニットの構成」の項で詳細に説明するが、自車位置認識ユニット2は、車両3に備えられたカメラ90(図1、図2参照)による撮影画像PGを用いて推定自車位置EPを補正することで、推定自車位置EPよりも高精度に自車位置を認識することが可能となっている。
【0033】
本実施形態では、図2(b)に示すように、カメラ90は車両3の後方を撮影するバックカメラ(リアカメラ)とされ、カメラ90による撮影画像PGには車両3の後方(反進行方向D3側)の路面が含まれる。具体的には、本実施形態では、カメラ90は主に路面が撮影されるように光軸に俯角(例えば30度程度)を有して車両3に設置されており、推定自車位置EPの補正のための画像認識において対象となる地物50は、路面に設けられた道路標示とされる。また、本実施形態では、カメラ90は、路面に直交する方向に見て、光軸が車両3の前後方向と平行になるように設置されている。
【0034】
2.自車位置認識ユニットの構成
次に、本発明の要部である自車位置認識ユニット2の構成について説明する。図1に示すように、自車位置認識ユニット2は、推定自車位置取得部21、画像処理部22、道路情報取得部23、推定自車位置補正部24、認識対象選択部25、及び認識率決定部26を備えている。
【0035】
2−1.推定自車位置取得部の構成
推定自車位置取得部21は、自車両3の推定位置である推定自車位置EPを取得する機能部である。本実施形態では、推定自車位置導出部94が導出した推定自車位置EPが推定自車位置取得部21に入力されることで、推定自車位置取得部21が推定自車位置EPを取得する。
【0036】
2−2.画像処理部の構成
画像処理部22は、車両3に備えられたカメラ90により撮影された撮影画像PGを取得し、当該撮影画像PGに含まれる地物50の画像認識処理を行う機能部である。すなわち、画像処理部22は、画像取得機能と画像認識機能とを有している。画像処理部22は、図6に一例を示すような認識地物単位60を認識対象として画像認識処理を行う。ここで、認識地物単位60は、単一の地物50、又は予め定められた複数の地物50で構成された地物群(地物セット)である。図6に示す例では、第一認識地物単位61及び第三認識地物単位63のそれぞれが、単一の地物50で構成されている。一方、第二認識地物単位62及び第四認識地物単位64のそれぞれは、互いに異なる位置に配置された複数の地物50からなる地物群で構成されている。
【0037】
具体的には、第一認識地物単位61は、単一の横断歩道標示51で構成され、第三認識地物単位63は、単一の停止線標示52で構成されている。また、第二認識地物単位62及び第四認識地物単位64のそれぞれは、同一種別の複数(本例では2つ)の地物50からなる地物群で構成されており、具体的には、第二認識地物単位62は、2つの停止線標示52からなる地物群で構成され、第四認識地物単位64は、2つの信号機54からなる地物群で構成されている。
【0038】
なお、認識地物単位60は、画像認識が成功した場合に少なくとも進行方向D1に沿う方向の位置を特定することが可能な形態の地物50により構成される。そのため、区画線標示53(図2(b)参照)のような進行方向D1に沿って連続的に或いは断続的に設けられる地物50は、基本的に、認識地物単位60を構成しない。また、各地物50は、基本的に単独で認識地物単位60を構成するが、図2に示す2つの停止線標示52や2つの信号機54のように、進行方向D1に沿った方向に近接して配置された同一種別の複数の地物50(地物群)については、誤認識を抑制すべく、当該複数の地物50をセットとして1つの認識地物単位60が構成されるように、認識地物単位60の形成規則が定められている。ここで、「近接して配置」とは、進行方向D1に沿う方向の間隔が所定距離以下であること、或いは、地物群が占める進行方向D1に沿う方向の幅が所定距離以下であることを意味する。この所定距離は、推定自車位置EPに含まれ得る誤差の最大値に基づき設定することができ、例えば、10メートル以上であって100メートル以下の範囲内の値とすることができる。
【0039】
画像処理部22の画像認識処理において認識対象とされる認識地物単位60は、後述する認識対象選択部25により選択される。そして、画像処理部22は、認識対象の当該認識地物単位60を構成する地物50(すなわち、認識対象の地物50)について設定された認識範囲A(図2参照)内の撮影画像PGを取得し、認識対象の地物50の画像認識を行う。ここで、認識範囲A内の撮影画像PGは、本実施形態では、推定自車位置EPが当該認識範囲Aに含まれる状態でカメラ90により撮影された撮影画像PGとされる。なお、推定自車位置EPと車両3へのカメラ90の設置形態(取付位置、取付角度、画角等)とに基づき定まる、撮影画像PGにおける進行方向D1側の端部に相当する位置(すなわち、当該端部に写っている位置)が、認識範囲Aに含まれる撮影画像PGを、当該認識範囲A内の撮影画像PGとすることもできる。
【0040】
そして、画像処理部22は、認識対象の認識地物単位60を構成する全て(単一又は複数)の地物50の画像認識に成功した場合に、当該認識地物単位60の画像認識に成功したと判定し、判定結果の情報を推定自車位置補正部24へ出力する。画像処理部22による画像認識処理は、例えば、撮影画像PGから取得される輪郭情報と、道路情報RDに含まれる認識対象の地物50の形態情報とに基づくパターンマッチング(テンプレートマッチング)手法を用いて行う構成とすることができる。
【0041】
ところで、上記の認識範囲Aは、図2に示すように、地物50のそれぞれに対して個別に設定されるリンクKに沿った方向(進行方向D1に沿った方向)の範囲であり、各地物50の位置情報に基づき設定される。この認識範囲Aの大きさは、リンクKに沿った方向の推定自車位置EPの誤差を考慮して設定すると好適であり、例えば、認識範囲Aの大きさを、推定自車位置EPに含まれ得る誤差の最大値の2倍或いは2倍以上の値に設定することができる。このような認識範囲Aを設定することで、認識対象の地物50の現実の位置(進行方向D1に沿う方向の位置)を、高い確率で認識範囲A内に収めることが可能となっている。この点に関して、以下、図2を参照して説明する。
【0042】
図2(b)は、道路の実際の状態を表す図であり、車両3の道路上の位置は現実の位置として表している。図2(a)は、図2(b)に示す道路に対応する道路情報RDを示している。一方、図2(d)は、図2(b)で示す道路において、推定自車位置EPに基づき車両3側で認識されている地図データ上の自車位置を示しており、この例では、推定自車位置EPに含まれる誤差により、推定自車位置EPが車両3の現実の位置(図2(b))に対して反進行方向D3側にずれている。なお、図2(d)においては、説明の都合上、推定自車位置EPが図2(b)の車両3と同じ進行方向D1の位置となるように、道路情報RDを進行方向D1側にずらして示している。
【0043】
このような場合、推定自車位置EP及び道路情報RD(具体的には地物50の位置情報)に基づき車両3側で特定される各地物50の位置は、図2(d)に示すように、現実の位置(図2(b))に対して進行方向D1側にずれる。この際、認識範囲Aの大きさを適切に設定することで、推定自車位置EPに基づき設定される認識範囲A内に、対応する地物50の現実の位置が含まれるようにすることができる。
【0044】
図2に示す例では、横断歩道標示51に対して反進行方向D3側の停止線標示52の現実の位置が、当該停止線標示52について設定された第一認識範囲A1に含まれ、横断歩道標示51の現実の位置が、当該横断歩道標示51について設定された第二認識範囲A2に含まれ、横断歩道標示51に対して進行方向D1側の停止線標示52の現実の位置が、当該停止線標示52について設定された第三認識範囲A3に含まれている。
【0045】
なお、カメラ90による所定の時間間隔毎の撮影画像PGは、図示しないバッファメモリに一時的に記憶される。画像処理部22は、認識対象の地物50についての認識範囲A内の撮影画像PGをこのバッファメモリから取得し、当該地物50の画像認識を行う。なお、認識範囲Aの大きさは、例えば、推定自車位置EPに含まれ得る誤差等に基づき設定された固定値とすることができ、また、車速や推定自車位置補正部24による前回の補正からの走行距離等に応じて可変に設定される構成とすることもできる。なお、図2に示す例では、認識範囲Aは、進行方向D1に沿った方向の中央部に対応する地物50が位置するように設定されている。
【0046】
2−3.道路情報取得部の構成
道路情報取得部23は、地物50の位置情報を含む道路情報RDを取得する機能部である。本実施形態では、道路情報取得部23は、道路情報RDを道路情報記憶部10から抽出して取得し、道路情報取得部23が取得した道路情報RDは、認識対象選択部25による認識地物単位60の選択処理、認識率決定部26による認識率決定処理、推定自車位置補正部24による推定自車位置補正処理を含む、自車位置認識ユニット2で実行される各種処理において利用される。
【0047】
道路情報取得部23は、道路情報記憶部10に位置情報が記憶されている複数の認識地物単位60の中から、認識対象選択部25による選択の対象となり得る認識地物単位60(すなわち、選択候補の認識地物単位60)の地物情報(具体的には、当該認識地物単位60を構成する各地物50の地物情報)を取得する。本実施形態では、道路情報取得部23は、推定自車位置取得部21が取得した推定自車位置EPに基づき車両3に対して前方(進行方向D1側)に所定の探索範囲を設定し、当該探索範囲内に存在する選択候補の認識地物単位60の地物情報を取得する。この地物情報の取得は、少なくとも推定自車位置EPが当該選択候補の認識地物単位60についての認識範囲A内に進入するまでの間に行われる。
【0048】
ここで、選択候補の認識地物単位60は、予め存在位置が把握されている認識地物単位60であって、将来的に撮影される撮影画像PGに画像認識が可能な状態で含まれ得る形態の認識地物単位60とされる。本実施形態では、上記のように、カメラ90は主に車両後方の路面を撮影するため、信号機54のような立体的な地物50の画像認識は現実的に困難である。そのため、図2に示す例では、図2(d)に示すように、第一認識地物単位61及び第二認識地物単位62が選択候補の認識地物単位60となる。
【0049】
なお、本実施形態では、各地物50についての認識地物単位60の情報が予め道路情報記憶部10に記憶されているが、道路情報取得部23が、道路情報記憶部10に記憶されている各地物50の地物情報と認識地物単位60の形成規則とに基づき、上記探索範囲内に存在する地物50の地物情報を取得する毎に、当該地物50についての認識地物単位60を設定する構成とすることもできる。
【0050】
2−4.認識対象選択部の構成
認識対象選択部25は、認識地物単位60のそれぞれの認識率Rに基づいて、複数の認識地物単位60の中から、画像処理部22の画像認識処理において認識対象とする認識地物単位60を選択する機能部である。なお、認識率Rは、認識地物単位60の画像認識に成功する割合を表す指標(成功率の推定値)であり、後述する認識率決定部26により決定される。本実施形態では、認識対象選択部25は、道路情報取得部23が地物情報を取得した選択候補の認識地物単位60の中から、認識対象とする認識地物単位60を選択する。
【0051】
そして、本実施形態では、選択候補の認識地物単位60が複数ある場合に、図2(c)に示すように、認識範囲A同士が重複する重複領域B内の撮影画像PGについては、複数(本例では2つ)の認識地物単位60の中から1つの認識地物単位60を選択して、当該認識地物単位60を構成する地物50の画像認識を行う。この際、認識率Rが最も高い認識地物単位60が選択される。また、認識範囲Aに重複領域Bが含まれる場合であっても、当該認識範囲Aに他の認識範囲Aと重複しない非重複領域がある場合、当該非重複領域内の撮影画像PGについては、認識対象選択部25により選択された認識地物単位60であるか否かにかかわらず、当該非重複領域に対応する地物50の画像認識を行う。図示は省略するが、認識範囲Aに重複領域Bが含まれない場合、当該認識範囲A内の撮影画像PGについては、当該認識範囲Aに対応する地物50の画像認識を行う。
【0052】
よって、図2に示す例では、第一認識地物単位61の認識率Rが第二認識地物単位62の認識率Rより高い場合、第二認識範囲A2内の撮影画像PGについては、横断歩道標示51を対象地物として画像認識が行われ、第一認識範囲A1における第一重複領域B1を除く領域内の撮影画像PG、及び第三認識範囲A3における第二重複領域B2を除く領域内の撮影画像PGについては、停止線標示52を対象地物として画像認識が行われる。逆に、第一認識地物単位61の認識率Rが第二認識地物単位62の認識率Rより低い場合、第一認識範囲A1内の撮影画像PG、及び第三認識範囲A3内の撮影画像PGについては、停止線標示52を対象地物として画像認識が行われ、第二認識範囲A2における第一重複領域B1及び第二重複領域B2を除く領域内の撮影画像PGについては、横断歩道標示51を対象地物として画像認識が行われる。
【0053】
2−5.推定自車位置補正部の構成
推定自車位置補正部24は、画像処理部22の画像認識処理による地物50(認識地物単位60)の認識結果と道路情報RDに含まれる地物50の位置情報とに基づき、推定自車位置EPを補正する機能部である。すなわち、推定自車位置補正部24は、画像処理部22による認識地物単位60の画像認識が成功した場合に、当該認識地物単位60を構成する地物50の位置情報を用いて、推定自車位置EPを補正する。本例では、推定自車位置補正部24は、推定自車位置EPの補正を、少なくとも進行方向D1に沿った方向において行う。
【0054】
具体的には、推定自車位置補正部24は、車両3へのカメラ90の設置形態に基づき、認識地物単位60の画像認識に成功した撮影画像PGの取得時における、自車両3と当該認識地物単位60との位置関係を演算する。この際、撮影画像PG中における認識地物単位60の位置や大きさ等が考慮される。推定自車位置補正部24は、上記位置関係の演算結果と、道路情報取得部23が取得した道路情報RDに含まれる認識地物単位60の地物情報(具体的には位置情報)とに基づく演算により、当該地物情報に基づく高精度の自車位置(地物依拠自車位置)を取得する。
【0055】
なお、カメラ90の設定形態によっては、認識地物単位60の画像認識に成功した撮影画像PGの取得時における自車両3の位置を、当該認識地物単位60の位置と同一視することも可能である。この場合、上記の地物依拠自車位置は、当該認識地物単位60の位置と同一とされる。また、画像認識に成功した認識地物単位60が複数の地物50の群で構成される場合には、例えば、最も進行方向D1側に位置する地物50の位置情報のみを用いて上記の地物依拠自車位置を取得する構成とすることができ、また、複数の地物50のそれぞれについて導出される地物依拠自車位置の平均値を、最終的な地物依拠自車位置とすることもできる。
【0056】
そして、推定自車位置補正部24は、取得した地物依拠自車位置を推定自車位置EPと置き換えることで、推定自車位置EPの補正を行う。なお、単に位置を置き換えるのではなく、認識地物単位60の画像認識に成功した撮影画像PGの撮影時からの走行距離(距離センサ92から取得可能)を考慮して自車位置の調整を行う構成とすることも可能である。
【0057】
2−6.認識率決定部の構成
認識率決定部26は、画像認識に成功する割合である認識率Rを、地物50の種別毎に予め定められた予想認識率ERに基づき認識地物単位60毎に決定する機能部である。このような機能を実現すべく、認識率決定部26は、本例では、予想認識率取得部31、暫定認識率取得部32、配置形態取得部33、補正係数取得部34、及び認識率導出部35を備えている。
【0058】
2−6−1.予想認識率取得部の構成
予想認識率取得部31は、認識地物単位60を構成する各地物50の予想認識率ERを取得する機能部である。本実施形態では、予想認識率ERは、地物種別と関連付けられて予想認識率記憶部11に記憶されており、予想認識率取得部31は、予想認識率記憶部11から予想認識率ERを抽出して取得する。
【0059】
ここで、予想認識率ERは、地物50の種別毎に予め定められた、画像認識の平均的な成功率(成功確率)を表し、0以上であって1以下の値に設定される。本実施形態では、予想認識率ERは、地物種別に応じた地物50の形態や配置傾向等によって、地物種別毎に一意に決定されている。図5に示す例では、横断歩道標示51、停止線標示52、及び信号機54のそれぞれの予想認識率ERが、「ER1」、「ER2」、及び「ER3」に設定されている。例えば、「ER1」を「0.6」とし、「ER2」を「0.8」とすることができる。
【0060】
2−6−2.暫定認識率取得部の構成
暫定認識率取得部32は、認識地物単位60を構成する地物50の予想認識率ERに基づき定まる暫定認識率TRを取得する機能部である。本実施形態では、暫定認識率取得部32は、予想認識率取得部31が取得した予想認識率ERに基づき演算を行い、認識地物単位60の暫定認識率TRを取得する。
【0061】
具体的には、暫定認識率取得部32は、認識地物単位60を構成する複数の地物50のそれぞれの予想認識率ERを互いに乗算することで、暫定認識率TRを導出する。すなわち、暫定認識率TRは、認識地物単位60を構成する複数の地物50のそれぞれの予想認識率ERを互いに乗算した値とされ、当該認識地物単位60を構成する地物50の種別及び個数に基づき一意に定まる。図6に示す例では、第一認識地物単位61の暫定認識率TRは「ER1」となり、第二認識地物単位62の暫定認識率TRは「ER2×ER2」となり、第三認識地物単位63の暫定認識率TRは「ER2」となり、第四認識地物単位64の暫定認識率TRは「ER3×ER3」となる。このように、認識地物単位60が1つの地物50により構成される場合には、当該地物50の予想認識率ERがそのまま暫定認識率TRとなる。
【0062】
2−6−3.配置形態取得部の構成
配置形態取得部33は、認識地物単位60を構成する地物50についての配置形態を取得する機能部である。この「配置形態」は、特定の認識地物単位60である特定認識地物単位60aの認識率Rを適切に補正するための指標であり、この配置形態に応じた補正係数Cにより、暫定認識率TRが補正される。なお、「補正」には、結果として暫定認識率TRと同じ値が認識率Rとして決定される場合も含む。また、本実施形態では、特定認識地物単位60aを含む全ての認識地物単位60について、配置形態に応じた補正係数Cに基づき認識率Rが決定される。
【0063】
ここで、「特定認識地物単位60a」とは、道路幅方向D2に分かれて配置された地物群からなる認識地物単位60である。具体的には、特定認識地物単位60aは、自車両3が走行中の車線である自車線と、当該自車線に隣接する車線(例えば対向車線)との境界部の両側に分かれて配置された同一種別の複数の地物50により構成される。図2に示す例では、第二認識地物単位62が、同一種別の2つの地物50(具体的には停止線標示52)により構成された特定認識地物単位60aとなる。また、上述したように、本実施形態では、認識対象選択部25による選択の対象とはならないが、図2に示す道路においては、一対の信号機54が構成する第四認識地物単位64(図6参照)も、同一種別の2つの地物50(具体的には信号機54)により構成された特定認識地物単位60aとなり得る。
【0064】
また、図2に示す例では、特定認識地物単位60aとしての第二認識地物単位62を構成する複数(本例では2つ)の地物50(停止線標示52)は、他の地物50(横断歩道標示51や区画線標示53)を挟んだ両側に設けられているとともに、交差点(ノードN)を挟んだ両側に設けられている。また、これら複数の地物50は、進行方向D1に沿った方向に近接して配置されているとともに、隣接する車線に分かれて配置されている。
【0065】
ところで、このように道路幅方向D2に分かれて配置された地物群からなる特定認識地物単位60aを画像認識の対象とする場合、画像認識の成功率は、一般的に、当該特定認識地物単位60aを構成する複数の地物50の道路幅方向D2の配置形態に依存する。この点について、図3及び図4を参照して説明する。
【0066】
図3は図2(b)と同じ道路を示し、図4は、図3に示す道路の道路幅W2を広くしたものに相当する。ここで、特定認識地物単位60aとしての第二認識地物単位62が画像認識の対象である場合を想定すると、図3と図4との比較から明らかなように、道路幅W2が大きくなるに従って、自車線に隣接する車線(本例では対向車線)に設けられている停止線標示52の画像認識の成功率が一般的に低下することが分かる。これは、道路幅方向D2が、車両3の進行方向D1に直交する方向であるとともに、カメラ90の光軸に交差(本例では直交)する方向であるためである。そこで、本実施形態では、配置形態を定める形態特徴量FCとして道路幅W2を考慮し、暫定認識率TRを補正するための補正係数Cを、道路幅W2が大きくなるに従って認識率Rを低くするように補正する値に設定している。
【0067】
また、図3から分かるように、特定認識地物単位60aを構成する複数の地物50(本例では一対の停止線標示52)の道路幅方向D2の間に他の地物50(本例では区画線標示53)が存在すると、別の種別の地物50との間で形状の区別がつきにくくなり、特定認識地物単位60aに対する画像認識の成功率が一般的に低下することが分かる。そこで、本実施形態では、配置形態として更に特定認識地物単位60aを構成する複数の地物50の道路幅方向D2の間に他の地物50(以下、単に「介在地物」という場合がある。)が存在するか否かを考慮し、介在地物が存在する場合の補正係数Cを、当該介在地物が存在しない場合の補正係数Cに比べて認識率Rを低くするように補正する値に設定している。
【0068】
上記のように、本実施形態では、配置形態を定める情報として、形態特徴量FCとしての道路幅W2の情報と、介在地物(図3、図4に示す例では区画線標示53)の有無の情報とを考慮する。そのため、本実施形態では、配置形態取得部33は、道路幅W2の情報と介在地物の有無の情報とを、道路情報記憶部10を介して道路情報記憶部10から取得する。
【0069】
2−6−4.補正係数取得部の構成
補正係数取得部34は、配置形態取得部33が取得した配置形態の情報に基づき補正係数Cを取得する機能部である。本実施形態では、補正係数Cは、認識地物単位60の種別に関連付けられるとともに配置形態にも関連付けられて補正係数記憶部12に記憶されており、補正係数取得部34は、補正係数記憶部12から補正係数Cを抽出して取得する。本実施形態では、補正係数Cは0以上であって1以下の値とされ、後述するように、補正係数Cの値が小さくなるほど認識率導出部35により導出される認識率Rが低くなる。なお、補正係数Cは、予め定められた固定値とすることも、地物情報等に基づいて可変に設定される可変値とすることも可能である。
【0070】
図6は、配置形態として道路幅W2(形態特徴量FCの一例)及び区画線標示53(介在地物の一例)の有無に関連付けられた補正係数Cの一例を示す。この例では、特定認識地物単位60aではない第一認識地物単位61については、配置形態によらずに暫定認識率TRの値をそのまま認識率Rとすべく、補正係数Cが全ての配置形態について「1」に設定されている。
【0071】
第一認識地物単位61と同様に特定認識地物単位60aではない第三認識地物単位63についても、補正係数Cは基本的に「1」に設定される。しかし、停止線標示52と区画線標示53とは互いに延在方向が直交するため、第三認識地物単位63については、区画線標示53が有る場合に、別の種別の地物50(例えば十字状やT字状の交差点形状標示等)との間で形状の区別がつきにくくなる。そのため、本例では、第三認識地物単位63についての区画線標示53が有る場合の補正係数Cである第三補正係数C3を、「1」より小さい値に設定している。
【0072】
特定認識地物単位60aである第二認識地物単位62については、基本的に、配置形態に応じて補正係数Cが異なる値に設定される。図6に示す例では、道路幅W2を所定の基準幅に比べて広い場合と狭い場合との2つの場合に分類し、道路幅W2が広い場合の補正係数Cである第一補正係数C1を、道路幅W2が狭い場合の補正係数C(本例では「1」)よりも小さい値に設定している。また、区画線標示53が有る場合の補正係数Cである第二補正係数C2を、区画線標示53が無い場合の補正係数C(本例では「1」)よりも小さい値に設定している。第一補正係数C1や第二補正係数C2は、例えば「0.7」とすることができる。なお、道路幅W2が狭い場合の補正係数Cや、区画線標示53が無い場合の補正係数Cを、「1」より小さい値に設定することも可能である。
【0073】
第二認識地物単位62と同様に特定認識地物単位60aである第四認識地物単位64についても、基本的に、配置形態に応じて補正係数Cが異なる値に設定される。しかし、信号機54は、画像認識において路面と容易に区別可能な高さに配置されるため、信号機54と区画線標示53とを区別することは一般的に容易である。そのため、本例では、第四認識地物単位64についての区画線標示53が有る場合の補正係数Cは「1」とし、道路幅W2が広い場合の補正係数Cである第四補正係数C4のみを、「1」より小さい値に設定している。
【0074】
2−6−5.認識率導出部の構成
認識率導出部35は、暫定認識率TRと補正係数Cとに基づき、認識地物単位60の認識率Rを導出する機能部である。本実施形態では、暫定認識率TRに補正係数Cを乗算することで、認識率Rを導出する。すなわち、認識率Rは、暫定認識率TRに補正係数Cを乗算した値とされる。これにより、認識率導出部35により導出される特定認識地物単位60aについての認識率Rは、暫定認識率TRを、当該特定認識地物単位60aを構成する複数の地物50の道路幅方向D2の配置形態に応じた補正係数Cにより補正した値とされる。
【0075】
本実施形態では、図6に示すように、配置形態として道路幅W2(形態特徴量FCの一例)と区画線標示53(介在地物の一例)の有無との2つが考慮されるため、認識率Rの導出に際しては、道路幅W2に応じて選択される補正係数Cと、区画線標示53の有無に応じて選択される補正係数Cとの双方を暫定認識率TRに乗算して認識率Rを導出する。例えば、道路幅W2が広く区画線標示53がある場合の第二認識地物単位62の認識率Rは、「ER2×ER2×C1×C2」として導出される。
【0076】
3.動作処理の手順
次に、図7〜図9を参照して、本実施形態に係る自車位置認識ユニット2において実行される自車位置認識処理の手順、すなわち、自車位置認識方法について説明する。以下に説明する自車位置認識処理の手順は、上記のナビゲーション装置1(自車位置認識ユニット2)の各機能部を構成するハードウェア又はソフトウェア(プログラム)或いはその両方により実行される。上記の各機能部がプログラムにより構成される場合には、ナビゲーション装置1が有する演算処理装置が、上記の各機能部を構成するプログラムを実行するコンピュータとして動作する。
【0077】
なお、図7は、道路情報取得部23により実行される、認識対象選択部25による選択の対象となり得る認識地物単位60(選択候補の認識地物単位60)を探索する認識地物単位探索処理の手順を示すフローチャートであり、図8は、図7のステップ#04の認識対象選択処理の手順を示すフローチャートである。また、図9は、図7に示す認識地物単位探索処理の結果に基づき実行される自車位置認識処理の手順を示すフローチャートである。図7及び図9のそれぞれの処理は、所定のタイミングで繰り返し実行されるとともに、並行に実行される。
【0078】
3−1.認識地物単位探索処理の手順
図7に示すように、推定自車位置取得部21により推定自車位置EPが取得されると(ステップ#01)、道路情報取得部23は、当該推定自車位置EPに基づき車両3の前方に設定される探索範囲内の道路情報RDを取得し、当該探索範囲内において認識対象選択部25による選択の対象となり得る選択候補の認識地物単位60の探索を行う(ステップ#02)。そして、探索範囲内に選択候補の認識地物単位60があった場合には(ステップ#03:Yes)、図8に基づき後に説明する認識対象選択処理を実行する(ステップ#04)。一方、探索範囲内に選択候補の認識地物単位60がなかった場合には(ステップ#03:No)、処理は終了する。
【0079】
3−2.認識対象選択処理の手順
図8に示すように、認識対象選択部25は、まず、選択候補の認識地物単位60のそれぞれの認識範囲Aの情報に基づき、認識範囲A同士が重複する重複領域Bがあるか否かの判定を行う(ステップ#11)。なお、認識範囲Aの情報は、道路情報記憶部10に記憶された道路情報RDに基づき取得される。認識範囲Aに重複領域Bがある場合には(ステップ#11:Yes)、予想認識率ERの取得(ステップ#12)、暫定認識率TRの取得(ステップ#13)、配置形態の取得(ステップ#14)、補正係数Cの取得(ステップ#15)、認識率Rの導出(ステップ#16)の各処理が順に実行されて各認識地物単位60についての認識率Rが決定され、処理はステップ17に進む。なお、ステップ#12〜ステップ#15の各処理の順序は、適宜入れ替えることが可能である。一方、認識範囲Aに重複領域Bがない場合には(ステップ#11:No)、処理は直接ステップ#17に進む。
【0080】
認識地物単位60の選択処理(ステップ#17)では、ステップ#11において重複領域Bがあると判定されていた場合には、認識率Rが最も高い認識地物単位60を、認識対象の認識地物単位60として選択する。一方、ステップ#11において重複領域Bがないと判定されていた場合には、図7のステップ#03で探索された選択候補の認識地物単位60をそのまま、認識対象の認識地物単位60として選択する。
【0081】
3−3.自車位置認識処理の手順
図9に示すように、推定自車位置取得部21により推定自車位置EPが取得されると(ステップ#21)、当該推定自車位置EPが対象地物の認識範囲A内に位置するか否かの判定が実行される(ステップ#22)。ここで、「対象地物」は、図7のステップ#03で探索された認識地物単位60を構成する地物50であり、図2に示す例では、横断歩道標示51及び一対の停止線標示52である(図2(d)参照)。
【0082】
推定自車位置EPが何れかの対象地物の認識範囲A内である場合には(ステップ#22:Yes)、当該認識範囲A内の撮影画像PGが取得され(ステップ#23)、対象地物の画像認識処理が実行される(ステップ#24)。ステップ#24の処理では、ステップ#23で取得された撮影画像PGが重複領域B(図2に示す例では第一重複領域B1又は第二重複領域B2)内の撮影画像PGである場合には、図8のステップ#17で選択された認識地物単位60を構成する地物50を対象地物として、画像認識処理を実行する。なお、本実施形態では、上述したように、重複領域Bを含む認識範囲Aについて、当該認識範囲Aにおける重複領域Bを除く領域内の撮影画像PGについては、図8のステップ#17で選択された認識地物単位60であるか否かにかかわらず、当該認識範囲Aに対応する地物50を対象地物として、画像認識処理を実行する。
【0083】
そして、認識地物単位60の画像認識に成功した場合、すなわち、認識地物単位60を構成する全て(単一又は複数)の地物50の画像認識に成功した場合には(ステップ#25:Yes)、当該認識地物単位60を構成する地物50の位置情報を用いて推定自車位置EPを補正する(ステップ#26)。一方、認識地物単位60の画像認識に成功していない場合(認識地物単位60を構成する一部の地物50のみの画像認識に成功している状態を含む)には(ステップ#25:No)、処理は終了し、ステップ#21からの処理が再度実行される。
【0084】
4.その他の実施形態
最後に、本発明に係る自車位置認識システムの、その他の実施形態について説明する。なお、以下のそれぞれの実施形態で開示される構成は、矛盾が生じない限り、他の実施形態で開示される構成と組み合わせて適用することが可能である。
【0085】
(1)上記の実施形態では、配置形態を定める形態特徴量FCが道路幅W2である構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、形態特徴量FCを、自車線の幅である車線幅W1(図3、図4参照)、又は特定認識地物単位60aを構成する複数の地物50間の道路幅方向D2の距離である地物間距離W3(図3、図4参照)とすることができる。このような構成においても、図3と図4との比較から明らかなように、車線幅W1や地物間距離W3が大きくなるに従って、特定認識地物単位60aに対する画像認識の成功率が一般的に低下することが分かる。よって、このような構成においても、上記の実施形態と同様、補正係数Cが、当該形態特徴量FCが大きくなるに従って認識率Rを低くするように補正する値とすると良い。この際、車線幅W1や地物間距離W3を特定するための情報が、道路情報RDに含まれた構成とすることができる。
【0086】
(2)上記の実施形態では、配置形態を定める情報として、形態特徴量FC(具体的には道路幅W2)の情報と、特定認識地物単位60aを構成する複数の地物50の道路幅方向D2の間に他の地物50が存在するか否かの情報との双方が考慮される構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、配置形態を定める情報として、何れか一方のみ(例えば形態特徴量FCのみ)の情報が考慮される構成とすることもできる。
【0087】
(3)上記の実施形態では、推定自車位置EPの補正のための画像認識において対象となる地物50が、路面に設けられた道路標示である構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、信号機54のような立体的な地物50を、推定自車位置EPの補正のために利用することも可能である。この場合、車両3へのカメラ90の設置形態は、当該立体的な地物50の画像認識が可能となるように設定される。
【0088】
(4)上記の実施形態では、選択候補の認識地物単位60のそれぞれの認識範囲A同士が重複する場合に、認識対象選択部25により選択されなかった認識地物単位60についても、当該認識地物単位60についての認識範囲Aに他の認識範囲Aと重複しない非重複領域がある場合には、当該非重複領域内の撮影画像PGに対して画像認識が実行される構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、認識対象選択部25により選択されなかった認識地物単位60については、何れの領域についても画像認識を実行しない構成とすることもできる。
【0089】
(5)上記の実施形態では、選択候補の認識地物単位60のそれぞれの認識範囲A同士が重複する場合に、認識対象選択部25による認識地物単位60の選択が実行される構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、認識範囲Aが互いに重複しない複数の選択候補の認識地物単位60の間でも、認識地物単位60の選択が行われる構成とすることもできる。このような構成とすることで、所定の距離内において選択される認識地物単位60の個数を制限することができる。
【0090】
(6)上記の実施形態では、カメラ90が車両3の後方を撮影するバックカメラである構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、カメラ90が車両3の前方を撮影するフロントカメラや、車両3の側方を撮影するサイドカメラとされた構成とすることも可能である。
【0091】
(7)上記の実施形態では、形態特徴量FC(本例では道路幅W2)が2つの場合に分類される構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、形態特徴量FCを、3つの場合に分類する等、形態特徴量FCが3つ以上の場合に分類される構成とすることも、本発明の好適な実施形態の1つである。このような場合においても、形態特徴量FCが大きくなるに従って補正係数Cが小さく設定される構成とすると好適である。
【0092】
(8)上記の実施形態では、補正係数Cが、形態特徴量FCの大きさや介在地物の有無によって異なる値とされる構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、補正係数Cがその他の要因によっても調整される構成とすることもできる。このような要因として、画像認識の成功率に影響を与える各種の要因を考慮することができ、例えば、地物50のかすれの状態や、地物50に対する日照の状態(例えば日向と日陰のいずれに含まれるか等)、或いは気象条件や時刻等に応じて、異なる値の補正係数Cが用いられる構成とすることができる。このような要因に関する情報は、例えば、地物50の位置情報と同様に道路情報記憶部10に備えられ、当該道路情報記憶部10から取得される構成とすることができる。
【0093】
(9)上記の実施形態では、暫定認識率取得部32が予想認識率ERに基づく演算により暫定認識率TRを取得する構成を例として説明したが、予想認識率ERに基づき予め決定された暫定認識率TRが記憶装置に記憶されており、当該記憶装置を参照して暫定認識率取得部32が暫定認識率TRを取得する構成とすることもできる。また、地物50の種別及び個数と暫定認識率TRとの関係を規定した暫定認識率マップが記憶装置に記憶されており、暫定認識率取得部32が当該暫定認識率マップを参照して、認識地物単位60を構成する地物50の種別及び個数に基づき、対応する暫定認識率TRを取得する構成とすることもできる。
【0094】
(10)上記の実施形態では、認識率導出部35が、暫定認識率TRと補正係数Cとに基づく演算により認識率Rを導出する構成を例として説明したが、暫定認識率TR及び補正係数Cと認識率Rとの関係を規定した認識率マップが記憶装置に記憶されており、認識率導出部35が当該認識率マップを参照して、暫定認識率TRと補正係数Cとに基づき、対応する認識率Rを取得する構成とすることもできる。
【0095】
(11)上記の実施形態では、認識率Rが、暫定認識率TRに補正係数Cを乗算した値とされる構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、認識率Rが、暫定認識率TRに補正係数Cを除算した値とされる構成とすることもできる。この場合、補正係数Cの値が大きくなるほど認識率導出部35により導出される認識率Rが低くなる。また、認識率Rが、暫定認識率TRに補正係数Cを加算或いは減算した値とされる構成とすることも可能である。
【0096】
(12)上記の実施形態では、本発明に係る自車位置認識システムを車載用のナビゲーション装置1に適用した場合を例として説明したが、このようなナビゲーション装置1は、車両3に固定的に搭載されたものに限らず、任意に移動可能なポータブルナビゲーション装置であって、使用時にのみ車両3に持ち込まれるようなものであっても良い。
【0097】
(13)上記の実施形態では、本発明に係る自車位置認識システムをナビゲーション装置1に適用した場合を例として説明したが、本発明に係る自車位置認識システムを、車両に備えられるその他の装置(走行制御装置等)に適用することも可能である。
【0098】
(14)上記の実施形態において説明した機能部の割り当ては単なる一例であり、複数の機能部を組み合わせたり、1つの機能部をさらに区分けしたりすることも可能である。また、上記の実施形態では、自車位置認識ユニット2を構成する各機能部、及び各記憶部10〜12が車両3に備えられる構成を例として説明したが、自車位置認識ユニット2の少なくとも一部の機能部や、記憶部10〜12の少なくとも一部が、車両3の外部(例えばサーバ装置等)に設けられ、インターネット等の通信ネットワークを介して情報や信号の送受信が行われる構成とすることもできる。
【0099】
(15)その他の構成に関しても、本明細書において開示された実施形態は全ての点で例示であって、本発明の実施形態はこれに限定されない。すなわち、本願の特許請求の範囲に記載されていない構成に関しては、本発明の目的を逸脱しない範囲内で適宜改変することが可能である。
【産業上の利用可能性】
【0100】
本発明は、自車両に備えられたカメラによる撮影画像を用いて自車位置を認識する自車位置認識システム、自車位置認識プログラム、及び自車位置認識方法に好適に利用することができる。
【符号の説明】
【0101】
3:車両(自車両)
21:推定自車位置取得部
22:画像処理部
23:道路情報取得部
24:推定自車位置補正部
25:認識対象選択部
26:認識率決定部
50:地物
60:認識地物単位
60a:特定認識地物単位
90:カメラ
C:補正係数
EP:推定自車位置
ER:予想認識率
FC:形態特徴量
PG:撮影画像
RD:道路情報
W1:車線幅(自車線の幅)
W2:道路幅
W3:地物間距離(地物間の道路幅方向の距離)
D2:道路幅方向
【特許請求の範囲】
【請求項1】
自車両の推定位置である推定自車位置を取得する推定自車位置取得部と、前記自車両に備えられたカメラにより撮影された撮影画像を取得し、当該撮影画像に含まれる地物の画像認識処理を行う画像処理部と、地物の位置情報を含む道路情報を取得する道路情報取得部と、前記画像認識処理による地物の認識結果と前記道路情報に含まれる地物の位置情報とに基づき前記推定自車位置を補正する推定自車位置補正部と、を備えた自車位置認識システムであって、
単一の地物又は予め定められた複数の地物で構成された地物群を認識地物単位として、画像認識に成功する割合である認識率を、地物の種別毎に予め定められた予想認識率に基づき前記認識地物単位毎に決定する認識率決定部と、
前記認識地物単位のそれぞれの前記認識率に基づいて、複数の前記認識地物単位の中から前記画像認識処理において認識対象とする前記認識地物単位を選択する認識対象選択部と、を備え、
前記認識率決定部は、道路幅方向に分かれて配置された地物群からなる前記認識地物単位である特定認識地物単位については、当該特定認識地物単位を構成する地物の前記予想認識率に基づき定まる暫定認識率を、当該特定認識地物単位を構成する複数の地物の道路幅方向の配置形態に応じた補正係数により補正して、前記認識率を決定する自車位置認識システム。
【請求項2】
前記配置形態は、自車線の幅、道路幅、又は前記特定認識地物単位を構成する複数の地物間の道路幅方向の距離の何れかである形態特徴量に応じて定まり、
前記形態特徴量は前記道路情報に含まれ、
前記補正係数は、前記形態特徴量が大きくなるに従って前記認識率を低くするように補正する値とされる請求項1に記載の自車位置認識システム。
【請求項3】
前記配置形態は、前記特定認識地物単位を構成する複数の地物の道路幅方向の間に他の地物が存在するか否かに応じて定まり、
前記他の地物が存在する場合の前記補正係数が、当該他の地物が存在しない場合の前記補正係数に比べて前記認識率を低くするように補正する値とされる請求項1又は2に記載の自車位置認識システム。
【請求項4】
前記暫定認識率は、前記特定認識地物単位を構成する複数の地物のそれぞれの前記予想認識率を互いに乗算した値であり、
前記認識率は、前記暫定認識率に前記補正係数を乗算した値である請求項1から3のいずれか一項に記載の自車位置認識システム。
【請求項5】
自車両の推定位置である推定自車位置を取得する推定自車位置取得機能と、前記自車両に備えられたカメラにより撮影された撮影画像を取得し、当該撮影画像に含まれる地物の画像認識処理を行う画像処理機能と、地物の位置情報を含む道路情報を取得する道路情報取得機能と、前記画像認識処理による地物の認識結果と前記道路情報に含まれる地物の位置情報とに基づき前記推定自車位置を補正する推定自車位置補正機能と、を実現させるための自車位置認識プログラムであって、
単一の地物又は予め定められた複数の地物で構成された地物群を認識地物単位として、画像認識に成功する割合である認識率を、地物の種別毎に予め定められた予想認識率に基づき前記認識地物単位毎に決定する認識率決定機能と、
前記認識地物単位のそれぞれの前記認識率に基づいて、複数の前記認識地物単位の中から前記画像認識処理において認識対象とする前記認識地物単位を選択する認識対象選択機能と、をコンピュータに実現させ、
前記認識率決定機能は、道路幅方向に分かれて配置された地物群からなる前記認識地物単位である特定認識地物単位については、当該特定認識地物単位を構成する地物の前記予想認識率に基づき定まる暫定認識率を、当該特定認識地物単位を構成する複数の地物の道路幅方向の配置形態に応じた補正係数により補正して、前記認識率を決定する機能である自車位置認識プログラム。
【請求項6】
自車両の推定位置である推定自車位置を取得する推定自車位置取得ステップと、前記自車両に備えられたカメラにより撮影された撮影画像を取得し、当該撮影画像に含まれる地物の画像認識処理を行う画像処理ステップと、地物の位置情報を含む道路情報を取得する道路情報取得ステップと、前記画像認識処理による地物の認識結果と前記道路情報に含まれる地物の位置情報とに基づき前記推定自車位置を補正する推定自車位置補正ステップと、を備えた自車位置認識方法であって、
単一の地物又は予め定められた複数の地物で構成された地物群を認識地物単位として、画像認識に成功する割合である認識率を、地物の種別毎に予め定められた予想認識率に基づき前記認識地物単位毎に決定する認識率決定ステップと、
前記認識地物単位のそれぞれの前記認識率に基づいて、複数の前記認識地物単位の中から前記画像認識処理において認識対象とする前記認識地物単位を選択する認識対象選択ステップと、を備え、
前記認識率決定ステップでは、道路幅方向に分かれて配置された地物群からなる前記認識地物単位である特定認識地物単位については、当該特定認識地物単位を構成する地物の前記予想認識率に基づき定まる暫定認識率を、当該特定認識地物単位を構成する複数の地物の道路幅方向の配置形態に応じた補正係数により補正して、前記認識率を決定する自車位置認識方法。
【請求項1】
自車両の推定位置である推定自車位置を取得する推定自車位置取得部と、前記自車両に備えられたカメラにより撮影された撮影画像を取得し、当該撮影画像に含まれる地物の画像認識処理を行う画像処理部と、地物の位置情報を含む道路情報を取得する道路情報取得部と、前記画像認識処理による地物の認識結果と前記道路情報に含まれる地物の位置情報とに基づき前記推定自車位置を補正する推定自車位置補正部と、を備えた自車位置認識システムであって、
単一の地物又は予め定められた複数の地物で構成された地物群を認識地物単位として、画像認識に成功する割合である認識率を、地物の種別毎に予め定められた予想認識率に基づき前記認識地物単位毎に決定する認識率決定部と、
前記認識地物単位のそれぞれの前記認識率に基づいて、複数の前記認識地物単位の中から前記画像認識処理において認識対象とする前記認識地物単位を選択する認識対象選択部と、を備え、
前記認識率決定部は、道路幅方向に分かれて配置された地物群からなる前記認識地物単位である特定認識地物単位については、当該特定認識地物単位を構成する地物の前記予想認識率に基づき定まる暫定認識率を、当該特定認識地物単位を構成する複数の地物の道路幅方向の配置形態に応じた補正係数により補正して、前記認識率を決定する自車位置認識システム。
【請求項2】
前記配置形態は、自車線の幅、道路幅、又は前記特定認識地物単位を構成する複数の地物間の道路幅方向の距離の何れかである形態特徴量に応じて定まり、
前記形態特徴量は前記道路情報に含まれ、
前記補正係数は、前記形態特徴量が大きくなるに従って前記認識率を低くするように補正する値とされる請求項1に記載の自車位置認識システム。
【請求項3】
前記配置形態は、前記特定認識地物単位を構成する複数の地物の道路幅方向の間に他の地物が存在するか否かに応じて定まり、
前記他の地物が存在する場合の前記補正係数が、当該他の地物が存在しない場合の前記補正係数に比べて前記認識率を低くするように補正する値とされる請求項1又は2に記載の自車位置認識システム。
【請求項4】
前記暫定認識率は、前記特定認識地物単位を構成する複数の地物のそれぞれの前記予想認識率を互いに乗算した値であり、
前記認識率は、前記暫定認識率に前記補正係数を乗算した値である請求項1から3のいずれか一項に記載の自車位置認識システム。
【請求項5】
自車両の推定位置である推定自車位置を取得する推定自車位置取得機能と、前記自車両に備えられたカメラにより撮影された撮影画像を取得し、当該撮影画像に含まれる地物の画像認識処理を行う画像処理機能と、地物の位置情報を含む道路情報を取得する道路情報取得機能と、前記画像認識処理による地物の認識結果と前記道路情報に含まれる地物の位置情報とに基づき前記推定自車位置を補正する推定自車位置補正機能と、を実現させるための自車位置認識プログラムであって、
単一の地物又は予め定められた複数の地物で構成された地物群を認識地物単位として、画像認識に成功する割合である認識率を、地物の種別毎に予め定められた予想認識率に基づき前記認識地物単位毎に決定する認識率決定機能と、
前記認識地物単位のそれぞれの前記認識率に基づいて、複数の前記認識地物単位の中から前記画像認識処理において認識対象とする前記認識地物単位を選択する認識対象選択機能と、をコンピュータに実現させ、
前記認識率決定機能は、道路幅方向に分かれて配置された地物群からなる前記認識地物単位である特定認識地物単位については、当該特定認識地物単位を構成する地物の前記予想認識率に基づき定まる暫定認識率を、当該特定認識地物単位を構成する複数の地物の道路幅方向の配置形態に応じた補正係数により補正して、前記認識率を決定する機能である自車位置認識プログラム。
【請求項6】
自車両の推定位置である推定自車位置を取得する推定自車位置取得ステップと、前記自車両に備えられたカメラにより撮影された撮影画像を取得し、当該撮影画像に含まれる地物の画像認識処理を行う画像処理ステップと、地物の位置情報を含む道路情報を取得する道路情報取得ステップと、前記画像認識処理による地物の認識結果と前記道路情報に含まれる地物の位置情報とに基づき前記推定自車位置を補正する推定自車位置補正ステップと、を備えた自車位置認識方法であって、
単一の地物又は予め定められた複数の地物で構成された地物群を認識地物単位として、画像認識に成功する割合である認識率を、地物の種別毎に予め定められた予想認識率に基づき前記認識地物単位毎に決定する認識率決定ステップと、
前記認識地物単位のそれぞれの前記認識率に基づいて、複数の前記認識地物単位の中から前記画像認識処理において認識対象とする前記認識地物単位を選択する認識対象選択ステップと、を備え、
前記認識率決定ステップでは、道路幅方向に分かれて配置された地物群からなる前記認識地物単位である特定認識地物単位については、当該特定認識地物単位を構成する地物の前記予想認識率に基づき定まる暫定認識率を、当該特定認識地物単位を構成する複数の地物の道路幅方向の配置形態に応じた補正係数により補正して、前記認識率を決定する自車位置認識方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−50411(P2013−50411A)
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願番号】特願2011−189361(P2011−189361)
【出願日】平成23年8月31日(2011.8.31)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願日】平成23年8月31日(2011.8.31)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]