
自車位置認識システム、自車位置認識プログラム、及び自車位置認識方法
【課題】画像認識処理における認識対象を決定するための地物の認識率を、当該地物の撮影時の自車両の速度を考慮して決定することが可能な技術を実現する。
【解決手段】道路情報RDを取得する道路情報取得部23bと、地物が配置された道路区間である地物配置区間に推定自車位置EPが進入する前に、少なくとも道路情報RDに基づいて、地物配置区間内での自車両の速度推移の予測を示す予測速度推移を決定する予測速度推移決定部27と、地物情報FTと予測速度推移とに基づいて、地物配置区間に含まれる地物の画像認識に成功する割合である認識率を決定する認識率決定部26と、画像認識処理において認識対象とする地物を認識率に基づき決定する認識対象決定部25と、を備える。
【解決手段】道路情報RDを取得する道路情報取得部23bと、地物が配置された道路区間である地物配置区間に推定自車位置EPが進入する前に、少なくとも道路情報RDに基づいて、地物配置区間内での自車両の速度推移の予測を示す予測速度推移を決定する予測速度推移決定部27と、地物情報FTと予測速度推移とに基づいて、地物配置区間に含まれる地物の画像認識に成功する割合である認識率を決定する認識率決定部26と、画像認識処理において認識対象とする地物を認識率に基づき決定する認識対象決定部25と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自車両に備えられたカメラによる撮影画像を用いて自車位置を認識する自車位置認識システム、自車位置認識プログラム、及び自車位置認識方法に関する。
【背景技術】
【0002】
上記のような自車位置認識システムの従来技術として、例えば特開2009−58429号公報(特許文献1)に記載された技術がある。特許文献1には、カメラによる撮影画像に含まれる地物の画像認識処理を行い、画像認識の結果と当該地物の位置情報とに基づき、推定自車位置を補正する技術が記載されている。この際、画像認識処理において認識対象とされる地物は、各地物の画像認識に成功する割合である認識率に基づいて決定される。具体的には、認識対象となり得る複数の地物が狭い間隔で配置されている場合に、認識率が高い地物を認識対象の地物として選択する。これにより、画像認識処理に係る演算負荷を低減しつつ、一定距離あたりの地物の認識率を高めることが可能となっている。
【0003】
ところで、地物を撮影するカメラは車両に備えられているため、画像認識の手法や画像認識装置の性能等によっては、同じ種別の地物に対する認識率が、当該地物の撮影時の自車両の速度に応じて変化することが想定される。しかし、このような自車両の速度に関して、特許文献1では特段の認識がなされていなかった。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−58429号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
そこで、画像認識処理における認識対象を決定するための地物の認識率を、当該地物の撮影時の自車両の速度を考慮して決定することが可能な技術の実現が望まれる。
【課題を解決するための手段】
【0006】
本発明に係る、自車両の推定位置である推定自車位置を取得する推定自車位置取得部と、前記自車両に備えられたカメラにより撮影された撮影画像を取得し、当該撮影画像に含まれる地物の画像認識処理を行う画像処理部と、地物の位置情報及び種別情報を含む地物情報を取得する地物情報取得部と、前記画像認識処理による地物の認識結果と前記地物情報に含まれる地物の位置情報とに基づき前記推定自車位置を補正する推定自車位置補正部と、を備えた自車位置認識システムの特徴構成は、道路情報を取得する道路情報取得部と、地物が配置された道路区間である地物配置区間に前記推定自車位置が進入する前に、少なくとも前記道路情報に基づいて、前記地物配置区間内での前記自車両の速度推移の予測を示す予測速度推移を決定する予測速度推移決定部と、前記地物情報と前記予測速度推移とに基づいて、前記地物配置区間に含まれる地物の画像認識に成功する割合である認識率を決定する認識率決定部と、前記画像認識処理において認識対象とする地物を前記認識率に基づき決定する認識対象決定部と、を備える点にある。
【0007】
上記の特徴構成によれば、地物の認識率を、地物情報に加えて、当該地物の撮影時の自車両の速度(速度の時間微分である加速度を含む)にも基づき決定することができる。この際、本発明では、一時停止義務のある交差点では車両が停止することが予測される等のように、自車両の速度推移が道路情報によって予測できることに着目して、認識率の決定に用いられる自車両の速度を、推定自車位置が地物配置区間に進入する前に道路情報に基づき決定される予測速度推移から得る構成を採用している。これにより、地物の撮影時の自車両の速度に応じた実際の認識率に近い認識率を、事前に推定することが可能となっている。
このように、上記の特徴構成によれば、画像認識処理における認識対象を決定するための地物の認識率を、当該地物の撮影時の自車両の速度を考慮して、事前に適切に決定することが可能となっている。
【0008】
ここで、前記道路情報は、交差点の有無及び交差点の種別を特定するための情報を含み、前記予測速度推移決定部は、前記地物配置区間に交差点が含まれる場合には、当該交差点を通過する際の前記自車両の速度が当該交差点の種別に応じた種別依存速度となるように前記予測速度推移を決定する構成とすると好適である。
【0009】
具体的には、例えば、前記地物配置区間に含まれる前記交差点への進入前に前記自車両が走行する走行道路が、前記交差点において当該走行道路に交差する他の道路に対する優先道路である場合の前記種別依存速度が、前記他の道路が前記走行道路に対する優先道路である場合の前記種別依存速度よりも高い値に決定される構成とすることができる。
【0010】
このような構成によれば、交差点の通行に際して予想される自車両の挙動を適切に考慮して予測速度推移を決定することができ、当該予測速度推移に基づき決定される認識率の信頼性を高めることができる。
【0011】
上記の各構成の自車位置認識システムにおいて、前記予測速度推移に基づいて、前記画像処理部による地物の画像認識処理を行う際の前記自車両の速度に起因する前記認識率に関する補正係数である速度要因補正係数を決定する補正係数決定部を更に備え、前記認識率決定部は、地物の種別に応じて予め定められた基準認識率を、前記速度要因補正係数により補正した値を前記認識率に決定する構成とすると好適である。
【0012】
この構成によれば、認識率を簡素な構成で導出することができるため、必要に応じて認識率を演算して決定する場合に、当該演算に係る負荷を低減することができる。また、認識率を予め演算して記憶装置に整備しておく場合には、当該整備に係るコストを低減することができる。
【0013】
上記のように、前記基準認識率を前記速度要因補正係数により補正した値を前記認識率に決定する構成において、前記補正係数決定部は、前記予測速度推移が示す前記自車両の加速度が高くなるに従って前記認識率を低くするように前記速度要因補正係数を決定する構成とすると好適である。
【0014】
この構成によれば、自車両の加速度が高くなるに従って速度の検出精度が低くなる傾向がある速度検出システムを用いる場合に、認識率を適切に決定することが可能となる。
【0015】
また、上記のように、前記基準認識率を前記速度要因補正係数により補正した値を前記認識率に決定する構成において、前記補正係数決定部は、前記予測速度推移が示す前記自車両の速度が低くなるに従って前記認識率を低くするように前記速度要因補正係数を決定する構成とすると好適である。
【0016】
この構成によれば、例えば車速パルスセンサ等の、自車両の速度が低くなるに従って速度の検出精度が低くなる傾向があるセンサを用いる場合に、認識率を適切に決定することが可能となる。
【0017】
また、上記のように、前記基準認識率を前記速度要因補正係数により補正した値を前記認識率に決定する構成において、前記認識率決定部は、路面上に設けられた地物であって、前記画像認識処理における認識対象部分の全体に亘って道路の延在方向の位置に関わらず同じ形状である地物については、前記速度要因補正係数による補正量を低減して前記認識率を決定する構成とすると好適である。
【0018】
この構成によれば、同一地物内で道路の延在方向に沿って異なる位置にある部分の位置関係が、当該地物の画像認識の成否に大きく影響しない地物について、現状により即した認識率を決定することが可能となる。
【0019】
上記の各構成の自車位置認識システムにおいて、道路の延在方向に分かれて配置されるとともに、隣り合う地物の当該延在方向に沿った間隔が所定距離以下である一群の地物については、当該一群の地物を構成する全ての地物を含むように前記地物配置区間が設定される構成とすると好適である。
【0020】
この構成によれば、予測速度推移決定部が決定した予測速度推移に基づき、一群の地物を構成する各地物の認識率を決定することができるため、認識率を決定するための構成の簡素化を図ることができる。
【0021】
以上の各構成を備えた本発明に係る自車位置認識システムの技術的特徴は、自車位置認識プログラムや自車位置認識方法にも適用可能であり、本発明はそのようなプログラムや方法も権利の対象とすることができる。
【0022】
その場合における、自車位置認識プログラムの特徴構成は、自車両の推定位置である推定自車位置を取得する推定自車位置取得機能と、前記自車両に備えられたカメラにより撮影された撮影画像を取得し、当該撮影画像に含まれる地物の画像認識処理を行う画像処理機能と、地物の位置情報及び種別情報を含む地物情報を取得する地物情報取得機能と、前記画像認識処理による地物の認識結果と前記地物情報に含まれる地物の位置情報とに基づき前記推定自車位置を補正する推定自車位置補正機能と、を実現させるための自車位置認識プログラムであって、道路情報を取得する道路情報取得機能と、地物が配置された道路区間である地物配置区間に前記推定自車位置が進入する前に、少なくとも前記道路情報に基づいて、前記地物配置区間内での前記自車両の速度推移の予測を示す予測速度推移を決定する予測速度推移決定機能と、前記地物情報と前記予測速度推移とに基づいて、前記地物配置区間に含まれる地物の画像認識に成功する割合である認識率を決定する認識率決定機能と、前記画像認識処理において認識対象とする地物を前記認識率に基づき決定する認識対象決定機能と、をコンピュータに実現させる点にある。
【0023】
また、自車位置認識方法の特徴構成は、自車両の推定位置である推定自車位置を取得する推定自車位置取得ステップと、前記自車両に備えられたカメラにより撮影された撮影画像を取得し、当該撮影画像に含まれる地物の画像認識処理を行う画像処理ステップと、地物の位置情報及び種別情報を含む地物情報を取得する地物情報取得ステップと、前記画像認識処理による地物の認識結果と前記地物情報に含まれる地物の位置情報とに基づき前記推定自車位置を補正する推定自車位置補正ステップと、を備えた自車位置認識方法であって、道路情報を取得する道路情報取得ステップと、地物が配置された道路区間である地物配置区間に前記推定自車位置が進入する前に、少なくとも前記道路情報に基づいて、前記地物配置区間内での前記自車両の速度推移の予測を示す予測速度推移を決定する予測速度推移決定ステップと、前記地物情報と前記予測速度推移とに基づいて、前記地物配置区間に含まれる地物の画像認識に成功する割合である認識率を決定する認識率決定ステップと、前記画像認識処理において認識対象とする地物を前記認識率に基づき決定する認識対象決定ステップと、を備える点にある。
【0024】
当然ながら、これらの自車位置認識プログラムや自車位置認識方法も上述した自車位置認識システムに係る作用効果を得ることができ、更に、その好適な構成の例として挙げたいくつかの付加的技術を組み込むことが可能である。
【図面の簡単な説明】
【0025】
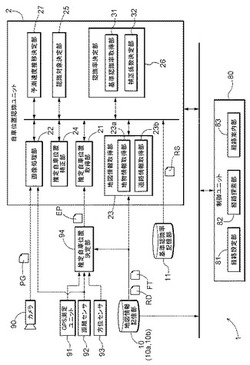
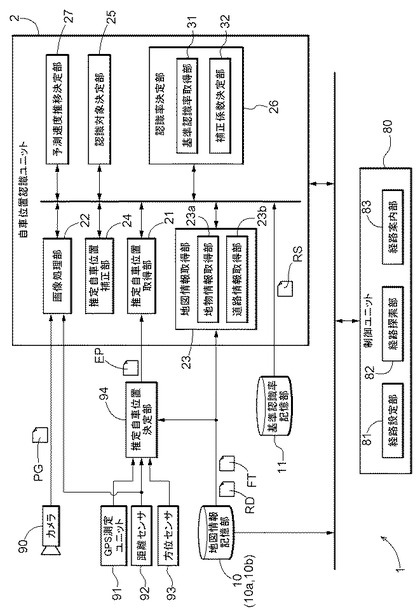
【図1】本発明の実施形態に係るナビゲーション装置の概略構成を示す模式図である。
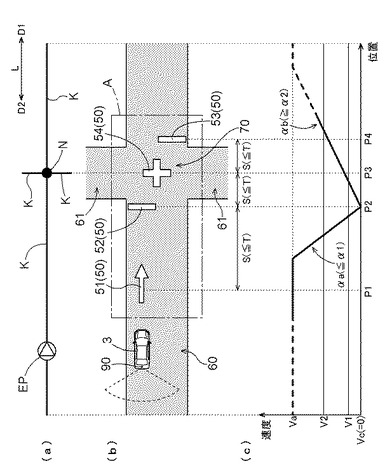
【図2】本発明の実施形態に係る車両の走行状況の一例を示す模式図であり、(a)はノードとリンクとが表す道路ネットワークを示し、(b)は(a)に対応する道路及び当該道路に設けられた地物を示し、(c)は(b)に示す地物配置区間内での予測速度推移を示す。
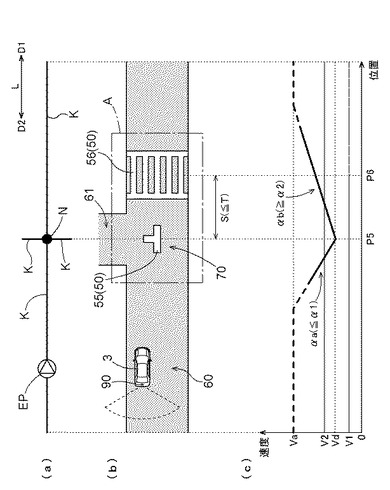
【図3】本発明の実施形態に係る車両の走行状況の別の一例を示す模式図であり、(a)はノードとリンクとが表す道路ネットワークを示し、(b)は(a)に対応する道路及び当該道路に設けられた地物を示し、(c)は(b)に示す地物配置区間内での予測速度推移を示す。
【図4】本発明の実施形態に係る速度予測値設定規則の一例を示す図である。
【図5】本発明の実施形態に係る加速度予測値設定規則の一例を示す図である。
【図6】本発明の実施形態に係る基準認識率記憶部に記憶されている情報の一例を示す概念図である。
【図7】本発明の実施形態に係る速度減点値設定規則の一例を示す図である。
【図8】本発明の実施形態に係る加速度減点値設定規則の一例を示す図である。
【図9】本発明の実施形態に係る自車位置認識処理の全体手順の一例を示すフローチャートである。
【図10】本発明の実施形態に係る推定自車位置補正処理の手順の一例を示すフローチャートである。
【発明を実施するための形態】
【0026】
本発明の実施形態について、図面を参照して説明する。ここでは、本発明に係る自車位置認識システムを、車載用のナビゲーション装置に適用した場合を例として説明する。本実施形態に係るナビゲーション装置1は、図1に示すように自車位置認識ユニット2を備え、この自車位置認識ユニット2を中核として自車位置認識システムが構築されている。
【0027】
以下の説明における「進行方向前方D1」及び「進行方向後方D2」(図2、図3参照)は、自車両3(以下、「車両3」という場合がある。)が道路の延在方向L(道路長さ方向)に沿って前進走行している状態を基準として定義している。よって、「進行方向前方D1」は車両3の前方へ向かう方向を指し、「進行方向後方D2」は車両3の後方へ向かう方向を指す。
【0028】
1.ナビゲーション装置の概略構成
図1に示すように、ナビゲーション装置1は、自車位置認識ユニット2と、制御ユニット80と、推定自車位置決定部94と、地図情報記憶部10と、基準認識率記憶部11と、を備えている。自車位置認識ユニット2及び制御ユニット80は、複数の機能部を備えている。
【0029】
ナビゲーション装置1が備える各機能部は、互いに共通の或いはそれぞれ独立のCPU等の演算処理装置を中核部材として、入力されたデータに対して種々の処理を行うための機能部がハードウェア又はソフトウェア(プログラム)或いはその両方により実装されて構成されている。また、これらの機能部は、通信線を介して互いに情報の受け渡しを行うことができるように構成されているとともに、各記憶部10,11からデータを抽出可能に構成されている。ここで、各機能部がソフトウェア(プログラム)により構成される場合には、当該ソフトウェアは、演算処理装置が参照可能な記憶装置に記憶される。
【0030】
地図情報記憶部10及び基準認識率記憶部11は、記憶装置により構成されるデータベースである。この記憶装置は、例えば、ハードディスクドライブやフラッシュメモリ等のように、情報を記憶及び書き換え可能な記録媒体をハードウェア構成として備える。なお、各記憶部10,11は、それぞれ独立のハードウェアを有していても良いし、共通のハードウェアに備えられていても良い。
【0031】
制御ユニット80は、経路設定部81、経路探索部82、及び経路案内部83を備えている。経路設定部81は、例えば自車位置等の出発地、入力された目的地、通過地点や走行条件(高速道路の使用有無など)を設定する機能部である。経路探索部82は、経路設定部81によって設定された条件に基づき、出発地から目的地までの案内経路を探索するための演算処理(経路探索処理)を行う機能部である。経路案内部83は、経路探索部82により探索された出発地から目的地までの経路に従って、モニタ(図示せず)の表示画面による案内標示やスピーカ(図示せず)による音声案内等により、運転者に対して適切な経路案内を行うための演算処理(経路案内処理)を行う機能部である。
【0032】
地図情報記憶部10には、上記の経路探索処理や経路案内処理を実行する際や、モニタへの地図表示処理を実行する際等に参照される地図情報(道路地図データ)が記憶(格納)されている。具体的には、地図情報は、道路ネットワークを表す道路情報RDと、この道路情報RDに関連付けられた地物情報FTとを有して構成されている。すなわち、地図情報記憶部10は、道路情報RDを記憶する道路情報記憶部10bと、地物情報FTを記憶する地物情報記憶部10aとが一体的に形成されたものである。
【0033】
道路情報RDは、図2(a)に概念的に示すように、緯度及び経度で表現された地図上の位置情報を有する多数のノードNの情報と、2つのノードNを連結して道路に対応する経路を構成する多数のリンクKの情報とを有して構成されている。ノードNは、例えば、道路の交差点70(図2、図3参照)、折曲点、分岐点等に設定される。なお、交差点70は、合流地点や分岐地点を含む。道路情報RDには、ノードNの属性に関するノード情報と、リンクKの属性に関するリンク情報とが含まれている。そして、交差点70に設定されたノードNについては、当該ノードNのノード情報として、交差点種別の情報と信号機の有無の情報とが含まれている。このように、道路情報RDは、交差点70の有無及び交差点70の種別を特定するための情報を含んでいる。
【0034】
本例では、交差点種別には、交差点70の優先関係に基づく優先度種別が含まれ、この優先度種別の情報を参照することで、信号機の無い交差点70に接続される道路の間での通行に関する優先順位の情報を取得することが可能となっている。また、リンク情報には、2つのノードNの間(すなわちリンクK上)に配置されてリンクKの詳細形状を表す形状補間点、道路幅、道路種別(高速道路、有料道路、国道、県道等の種別)、制限速度(最高速度)、リンク長さ等の情報が含まれている。
【0035】
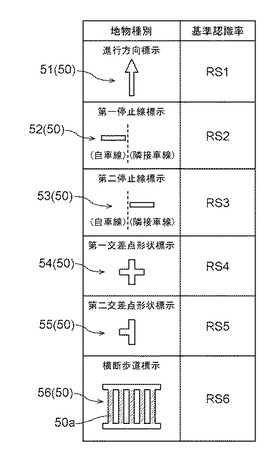
地物情報FTは、道路上や道路周辺に設けられた各種の地物50の情報である。地図情報記憶部10に地物情報FTが格納される地物50には道路標示が含まれ、本実施形態では更に、道路との相対位置が固定されている立体的な構造物(例えば、標識、信号機等)も含まれる。ここで、道路標示とは、ペイント等により路面に設けられた規制や指示のための記号や文字である。道路標示には、例えば、図6に示すように、進行方向を示す標示(進行方向標示51)、停止線を示す標示(自車線に設けられた第一停止線標示52、隣接車線(対向車線等)に設けられた第二停止線標示53)、交差点70の形状を示す標示(十字状の第一交差点形状標示54、T字状の第二交差点形状標示55)、横断歩道であることを示す標示(横断歩道標示56)等が含まれる。
【0036】
地物情報FTには、地物50の位置情報と種別情報とが含まれる。ここで、位置情報は、地物50の地図上の位置(緯度及び経度)を表す情報であり、本例では、ノードNや上記形状補間点を基準とした情報とされている。この位置情報は、基本的に、地物50の代表点(例えば地物50の長さ方向及び幅方向の中心)の位置を表す情報とされる。また、種別情報は、地物50の種別を表す情報であり、本例では、形状、色彩、道路幅方向の配置を含む形態が同一の地物50が、1つの種別として規定されている。具体的には、図6に示すように、互いに異なる形状の地物50が異なる種別に分類されているとともに、第一停止線標示52と第二停止線標示53とのように、同一形状であっても上記形態が異なるもの(具体的には、進行方向車線とは異なる車線に配置されているもの)は、異なる種別に分類されている。
【0037】
上記のような道路情報RD及び地物情報FTを有する地図情報は、データベース化され、地図情報記憶部10の仕様に応じた形態で格納されている。例えば、地図情報が、互いに関連付けられた複数のレイヤに分かれて地図情報記憶部10に格納された構成とすることができる。具体的には、道路間の接続情報を示す道路ネットワークレイヤ、道路形状を示す道路形状レイヤ、及び、道路上や道路周辺に設けられた各種の地物50の情報を示す地物レイヤを含む少なくとも3つのレイヤに分かれて地図情報が備えられた構成とすることができる。この場合、道路情報RDは、道路ネットワークレイヤ及び道路形状レイヤに格納された情報により構成され、地物情報FTは、地物レイヤに格納された情報により構成される。
【0038】
推定自車位置決定部94は、車両3に備えられたGPS測定ユニット91、距離センサ92、及び方位センサ93の出力に基づき、自車両3の推定位置である推定自車位置EPを決定する機能部である。具体的には、推定自車位置決定部94は、GPS測定ユニット91から取得したGPS(Global Positioning System)信号を解析することで、自車両3の現在位置(緯度及び経度)を導出してGPS位置データを得る。また、推定自車位置決定部94は、距離センサ92や方位センサ93から取得した移動距離情報と方位情報とに基づいて推測航法位置を導出して推測航法位置データを得る。そして、推定自車位置決定部94は、GPS位置データと推測航法位置データとから公知の方法により自車両3の推定位置である推定自車位置EPを導出する演算を行って推定自車位置EPを決定し、決定した推定自車位置EPの情報を自車位置認識ユニット2へ出力する。
【0039】
上記のように決定される推定自車位置EPは、測定誤差を含んだ情報となっており、場合によっては道路上から外れてしまう。本実施形態では、このような場合には地図情報記憶部10に記憶された道路地図データに基づき、推定自車位置決定部94が推定自車位置EPを道路地図に示される道路上に合わせるための補正(マップマッチング処理)を行い、当該補正後の推定自車位置EPの情報が自車位置認識ユニット2へ出力される。
【0040】
自車位置認識ユニット2は、推定自車位置決定部94から取得した推定自車位置EPを補正するための各機能部22〜27を備えている。自車位置認識ユニット2の構成については、後の「2.自車位置認識ユニットの構成」の項で詳細に説明するが、自車位置認識ユニット2は、車両3に備えられたカメラ90(図1〜図3参照)による撮影画像PGを用いて推定自車位置EPを補正することで、推定自車位置決定部94が決定する推定自車位置EPよりも高精度に、自車位置を認識することが可能となっている。
【0041】
本実施形態では、図2(b)、図3(b)に示すように、カメラ90は車両3の後方を撮影するバックカメラ(リアカメラ)とされ、カメラ90による撮影画像PGには車両3の後方(進行方向後方D2側)の路面が含まれる。具体的には、本実施形態では、カメラ90は主に路面が撮影されるように光軸に俯角(例えば30度程度)を有して車両3に設置されており、推定自車位置EPの補正のための画像認識において対象となる地物50は、路面に設けられた道路標示とされる。
【0042】
2.自車位置認識ユニットの構成
次に、本発明の要部である自車位置認識ユニット2の構成について説明する。図1に示すように、自車位置認識ユニット2は、推定自車位置取得部21、画像処理部22、地図情報取得部23、推定自車位置補正部24を備えるとともに、更に、予測速度推移決定部27、認識率決定部26、認識対象決定部25を備えている。
【0043】
2−1.推定自車位置取得部の構成
推定自車位置取得部21は、自車両3の推定位置である推定自車位置EPを取得する機能部である。本実施形態では、推定自車位置決定部94が決定した推定自車位置EPが推定自車位置取得部21に入力されることで、推定自車位置取得部21が推定自車位置EPを取得する。
【0044】
2−2.画像処理部の構成
画像処理部22は、自車両3に備えられたカメラ90により撮影された撮影画像PGを取得し、当該撮影画像PGに含まれる地物50の画像認識処理を行う機能部である。すなわち、画像処理部22は、画像取得機能と画像認識機能とを有している。画像処理部22による画像処理は、推定自車位置EPが、画像認識処理を行う範囲として道路の延在方向Lに沿って設定された画像認識区間内に位置する場合に実行される。この画像認識区間は、本実施形態では、後述する地物配置区間Aと基本的には一致する。
【0045】
画像処理部22による画像認識処理において認識対象とされる地物50は、画像認識された場合(すなわち画像認識に成功した場合)に少なくとも道路の延在方向Lの位置を特定することが可能な地物50とされる。そのため、区画線標示(図示せず)のような道路の延在方向Lに沿って連続的に或いは断続的に設けられる地物50は、基本的に、認識対象の地物50とはならない。図6に、認識対象とされ得る地物50の一例を示す。なお、図6に示す各地物50は、単一の道路標示から構成されているが、複数(例えば2つ)の道路標示により構成される地物50を、画像認識処理において認識対象とすることも可能である。画像認識処理において認識対象とする地物50は、後述する認識対象決定部25により決定される。
【0046】
カメラ90による所定の時間間隔毎の撮影画像PG(例えば、毎秒15〜30フレームの撮影画像PG)は図示しないバッファメモリに一時的に記憶され、画像処理部22は、このバッファメモリから撮影画像PGを取得する。本実施形態では、画像処理部22は、認識対象の地物50が撮影された複数のフレームを合成して、当該地物50の画像認識を行う。この際、画像処理部22は、距離センサ92から取得した車速情報に基づき、認識対象の地物50の撮影時の車速(自車両3の速度)に応じてフレームの合成を行う。画像処理部22による画像認識処理は、本実施形態では、撮影画像PGから取得される輪郭情報と、地物情報FTに含まれる認識対象の地物50の形状情報とに基づくパターンマッチング(テンプレートマッチング)手法を用いて実行される。
【0047】
上記のように、画像処理部22による画像認識処理において用いられる車速は、距離センサ92の検出結果に基づくものである。そして、本実施形態では、距離センサ92として、ドライブシャフトやホイール等が一定量回転する毎にパルス信号を出力する車速パルスセンサを用いたものが採用されている。そのため、距離センサ92による車速の検出精度(分解能)は、車速が低くなるに従って全体として低下する。また、画像処理部22が取得する車速と、当該取得の時点における現実の車速との間には、制御遅れ或いは検出遅れ等に起因して差異が生じ、当該差異の大きさは、自車両3の加速度が正方向側(加速側)又は負方向側(減速側)に高くなる(すなわち、絶対値が大きくなる)に従って一般的に大きくなる。
【0048】
よって、本実施形態では、画像処理部22が取得する車速に含まれ得る誤差の最大値は、車速が低くなるに従って大きくなるとともに、加速度が高くなるに従って大きくなる傾向がある。そして、車速に誤差が含まれると、複数のフレームを合成して得られる地物50の形状は、実際の地物50の形状を、道路の延在方向Lに沿って長く或いは短くした形状となる。このため、地物50の画像認識に成功する割合である認識率Rは、車速に含まれる誤差が大きくなるに従って低下するという傾向を有することになる。すなわち、地物50の撮影時における車速が低くなるに従って当該地物50の認識率Rが低下するとともに、地物50の撮影時における自車両3の加速度が高くなるに従って当該地物50の認識率Rが低下するという傾向が生じる。本実施形態では、このような認識率Rの自車両3の速度や加速度に応じた変化の傾向を考慮して、認識率決定部26が各地物50の認識率Rを決定するという構成を採用することで、各地物50についての認識率Rを適切に決定することが可能となっている。認識率決定部26の構成については後述する。
【0049】
2−3.地図情報取得部の構成
地図情報取得部23は、地物情報FT及び道路情報RDを取得する機能部である。本実施形態では、地図情報取得部23は、地図情報記憶部10を参照して地物情報FTや道路情報RDを取得する。具体的には、地図情報取得部23は、地図情報記憶部10(道路情報記憶部10b)を参照して道路情報RDを取得する道路情報取得部23bを備え、道路情報取得部23bが取得した道路情報RDは、予測速度推移決定部27による予測速度推移決定処理を含む、自車位置認識ユニット2で実行される各種処理において利用される。また、地図情報取得部23は、地図情報記憶部10(地物情報記憶部10a)を参照して地物情報FTを取得する地物情報取得部23aを備え、地物情報取得部23aが取得した地物情報FTは、画像処理部22による画像認識処理、推定自車位置補正部24による推定自車位置補正処理、認識率決定部26による認識率決定処理を含む、自車位置認識ユニット2で実行される各種処理において利用される。
【0050】
2−4.推定自車位置補正部の構成
推定自車位置補正部24は、画像処理部22の画像認識処理による地物50の認識結果と地物情報FTに含まれる地物50の位置情報とに基づき、推定自車位置EPを補正する機能部である。すなわち、推定自車位置補正部24は、画像処理部22による地物50の画像認識が成功した場合に、当該地物50の位置情報を用いて推定自車位置EPを補正する。本例では、推定自車位置補正部24は、推定自車位置EPの補正を、少なくとも道路の延在方向Lにおいて行う。
【0051】
具体的には、推定自車位置補正部24は、車両3へのカメラ90の設置形態に基づき、画像認識された地物50の位置と、当該地物50の撮影時の自車両3の位置との間の位置関係を演算する。この際、撮影画像PG中における地物50の位置や大きさ等が考慮される。そして、推定自車位置補正部24は、上記位置関係の演算結果と、地図情報取得部23が取得した地物情報FT(具体的には位置情報)とに基づく演算により、当該地物情報FTに基づく高精度の自車位置(地物依拠自車位置)を取得する。なお、上記位置関係の演算を行わずに、予め定めた固定的な位置関係を用いることも可能である。例えば、地物50の撮影時の自車両3の位置を、当該地物50の位置とすることや、当該地物50の位置に対して道路の延在方向Lに沿って所定距離(固定値)だけ離れた位置とすることが可能である。
【0052】
推定自車位置補正部24は、取得した地物依拠自車位置を推定自車位置EPと置き換えることで、推定自車位置EPの補正を行う。なお、単に位置を置き換えるのではなく、地物50の撮影時からの走行距離(距離センサ92から取得可能)を考慮して自車位置の調整を行う構成とすることも可能である。
【0053】
2−5.予測速度推移決定部の構成
予測速度推移決定部27は、道路情報RDに基づいて、地物50が配置された道路区間である地物配置区間A内での自車両3の速度推移の予測を示す予測速度推移を決定する機能部である。この予測速度推移の決定は、推定自車位置EPが当該予測速度推移の決定対象の地物配置区間Aに進入する前に実行される。すなわち、地物配置区間Aは、車両3に対して進行方向前方D1に設定される。また、予測速度推移決定部27が決定した予測速度推移は、後述する認識率決定部26による認識率Rの決定に用いられ、この認識率Rに基づき、画像処理部22により実行される画像認識処理において認識対象とする地物50が、認識対象決定部25により決定される。そのため、地物配置区間Aは、当該画像認識処理において認識対象となり得る地物50(本例では図6に示すような道路標示)を含むように設定される。
【0054】
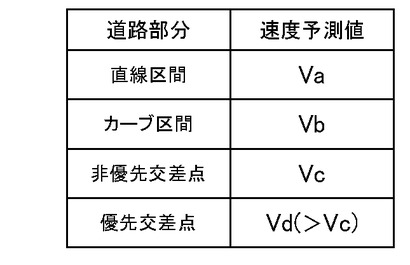
予測速度推移決定部27は、地図情報取得部23が取得した地物配置区間Aの道路情報RDに基づき、当該地物配置区間A内での予測速度推移を決定する。本実施形態では、速度予測値設定規則と加速度予測値設定規則とからなる予測速度推移設定規則に基づき、予測速度推移決定部27が予測速度推移を決定する。ここで、速度予測値設定規則は、道路上における各道路部分(区間又は地点)における速度予測値を規定する規則であり、加速度予測値設定規則は、速度予測値の異なる道路部分同士の接続部における加速度予測値を設定する規則である。
【0055】
図4は、速度予測値設定規則の一例を示す図であり、この例では、速度予測値が、「直線区間」、「カーブ区間」、「非優先交差点」、及び「優先交差点」の4つの道路部分(道路形態)について規定されている。ここで、直線区間は、道路の曲率半径が所定の基準値以上(無限大を含む)の区間であり、カーブ区間は、道路の曲率が当該基準値より小さな区間である。この基準値は、制限速度に基づき設定される値とすることができ、例えば、車両3が制限速度で走行(旋回を含む)した場合に車両3に作用する横加速度が所定値(例えば0.2〔G〕等、Gは重力加速度)となる曲率半径を上記基準値とすることができる。また、優先交差点は、交差点への進入前に自車両3が走行する走行道路60(図2、図3参照)が、当該交差点において走行道路60に交差する他の道路61(図2、図3参照)に対する優先道路である交差点であり、非優先交差点は、他の道路61が走行道路60に対する優先道路である交差点である。
【0056】
直線区間に対応する速度予測値である第一予測速度Vaは、制限速度に基づく値とすることができ、例えば、制限速度と同じ値としたり、制限速度に所定値を乗算した値又は加算した値とすることができる。なお、この場合の所定値(乗算値又は加算値)は、学習値とすることが可能である。制限速度に関する情報は、地図情報記憶部10に記憶された道路情報RDに基づき取得される構成とすることも、道路側に設置された通信装置との間の路車間通信により得た情報に基づき取得される構成とすることもできる。カーブ区間に対応する速度予測値である第二予測速度Vbは、道路の曲率半径に基づく推奨車速とすることができる。この推奨車速は、例えば、車両3に作用する横加速度が所定値(例えば0.2〔G〕等)となる速度とすることができ、この場合、曲率半径が小さくなるに従って第二予測速度Vbは低い値に設定される。
【0057】
非優先交差点に対応する速度予測値である第三予測速度Vcは、基本的に、優先交差点に対応する速度予測値である第四予測速度Vdよりも小さな値に設定される。具体的には、第三予測速度Vcは、設定対象の非優先交差点が一時停止義務のある交差点(例えば、図2に示す第一停止線標示52の設けられた交差点70)である場合には、零に設定される。また、第四予測速度Vdは、例えば、設定対象の優先交差点が設けられた道路区間(直線区間或いはカーブ区間)の速度予測値と同じ値に設定したり、当該速度予測値から所定値を減算した値又は1以下の所定値を乗算した値に設定することができる。この場合の所定値(減算値又は乗算値)は、学習値とすることが可能である。本実施形態では、第三予測速度Vc及び第四予測速度Vdが、本発明における「種別依存速度」に相当する。
【0058】
なお、速度予測値設定規則に規定される速度予測値を、固定値ではなく学習値とすることも可能である。また、速度予測値設定規則に規定される速度予測値が、個人別や道路部分別(区間別又は地点別)に個別に設定される構成とすることもできる。このような場合には、ある非優先交差点についての第三予測速度Vcを、ある優先交差点についての第四予測速度Vdと同じ値に設定したり、当該第四予測速度Vdよりも大きな値に設定することもできる。
【0059】
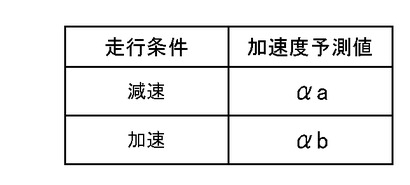
図5は、加速度予測値設定規則の一例を示す図であり、この例では、加速度予測値が、「減速」及び「加速」の2つの走行条件について規定されている。減速に対応する加速度予測値である第一予測加速度αa(<0)や、加速に対応する加速度予測値である第二予測加速度αb(>0)は、運転者の一般的傾向に基づき設定される値とすることができ、例えば、絶対値が0.1〔G〕や0.2〔G〕等となる加速度とすることができる。この加速度予測値についても、上記速度予測値と同様に、固定値ではなく学習値としたり、個人別や道路部分別(区間別又は地点別)に個別に設定される構成とすることも可能である。
【0060】
上記のような構成を備えるため、地物配置区間Aに交差点70が含まれる場合には、当該交差点70を通過する際の自車両3の速度が当該交差点70の種別に応じた種別依存速度(図4の例では第三予測速度Vc又は第四予測速度Vd)となるように予測速度推移が決定される。また、地物配置区間Aに含まれる交差点70への進入前に自車両3が走行する走行道路60が、当該交差点70において走行道路60に交差する他の道路61に対する優先道路である場合の種別依存速度である第四予測速度Vdは、他の道路61が走行道路60に対する優先道路である場合の種別依存速度である第三予測速度Vcよりも高い値に決定される。
【0061】
予測速度推移決定部27が決定する予測速度推移の具体例について、図2及び図3を参照して説明する。図2(b)は、自車両3の進行方向前方D1側に交差点70があり、当該交差点70が非優先交差点である状況を表す図であり、図2(a)は、図2(b)に対応する道路ネットワーク情報を表している。図2(a)及び図2(b)の双方は、推定自車位置EPに基づき車両3側で認識されている道路情報RDを示している。そのため、図示は省略するが、車両3に対する各地物50の実際の位置(延在方向Lの位置)は、図2(b)に示す位置から、推定自車位置EPに含まれる誤差に応じて延在方向Lに沿ってずらした位置となる。
【0062】
図2(b)に示す例では、車両3の進行方向前方D1側にある、進行方向標示51、第一停止線標示52、第一交差点形状標示54、及び第二停止線標示53を全て含むように、地物配置区間Aが設定されている。これら4つの地物50(進行方向標示51、第一停止線標示52、第一交差点形状標示54、及び第二停止線標示53)は、道路の延在方向Lに分かれて配置されるとともに、隣り合う地物50の当該延在方向Lに沿った間隔Sが所定距離T以下となっている。すなわち、本実施形態では、地物配置区間Aは、道路の延在方向Lに分かれて配置されるとともに、隣り合う地物50の当該延在方向Lに沿った間隔Sが所定距離T以下である一群の地物については、当該一群の地物を構成する全ての地物50を含むように、延在方向Lに延びる連続区間として設定される。
【0063】
ここで、所定距離Tは、例えば、推定自車位置EPに含まれ得る誤差の最大値に基づき設定することができ、例えば、10〔m〕以上であって100〔m〕以下の範囲内の値とすることができる。なお、この所定距離Tは、車速に応じて可変に設定することも可能である。また、推定自車位置EPに含まれ得る誤差の最大値は、推定自車位置補正部24による前回の補正からの走行距離に応じて変化し得るため、この変化を考慮して前回の補正からの走行距離に応じて所定距離Tを可変に設定することも可能である。また、地物50間の間隔Sは、図2に示す例では、地物50の延在方向Lにおける中央部同士の間隔としているが、地物50の延在方向Lにおける互いに近い側の端部同士の間隔(すなわち、地物50に占有されない部分の道路長さ)とすることもできる。
【0064】
ここで、地物配置区間Aに含まれる地物50の中で最も進行方向後方D2側に位置する地物50(図2に示す例では進行方向標示51)を「第一対象地物」とし、地物配置区間Aに含まれる地物50の中で最も進行方向前方D1側に位置する地物50(図2に示す例では第二停止線標示53)を「第二対象地物」とする。図2に示す例では、地物配置区間Aの進行方向後方D2側の端部は、第一対象地物の進行方向後方D2側の端部に対して進行方向後方D2側に第一所定距離だけ離間した位置に設定され、地物配置区間Aの進行方向前方D1側の端部は、第二対象地物の進行方向前方D1側の端部に対して進行方向前方D1側に第二所定距離だけ離間した位置に設定されている。このように第一所定距離や第二所定距離を設定するのは、上述したように、本実施形態では、地物配置区間Aが、画像認識処理を実行する範囲である画像認識区間に一致するためであり、第一所定距離や第二所定距離は、推定自車位置EPに含まれ得る誤差の最大値に基づく値(例えば、当該最大値と同じ値、当該最大値の2倍の値等)に設定することが可能である。
【0065】
図2(c)は、図2(b)で示す例において、図4に示す速度予測値設定規則、及び図5に示す加速度予測値設定規則に基づき決定される予測速度推移を示している。この例では、第一停止線標示52の設置地点である第二地点P2において、車速が非優先交差点に対応する第三予測速度Vc(本例では零)となるとともに、当該第二地点P2に対して進行方向後方D2側から近づく際の減速に係る加速度が「αa」となり、当該第二地点P2から進行方向前方D1側に離れる際の加速に係る加速度が「αb」となるように、予測速度推移が決定されている。このように予測速度推移が決定されるため、本実施形態では、予測速度推移における加減速の開始地点や終了地点は、交差点70の位置、加速度予測値(図5参照)、速度予測値(図4参照)に基づき定まる。
【0066】
図3は、図2とは異なる走行状況を示した図であり、図3(a)、図3(b)、図3(c)が、それぞれ、図2(a)、図2(b)、図2(c)に対応する。この図3に示す例では、自車両3の進行方向前方D1側にある交差点70は非優先交差点ではなく優先交差点であり、車両3の進行方向前方D1側にある第二交差点形状標示55と横断歩道標示56とを含むように、地物配置区間Aが設定されている。
【0067】
ところで、図2及び図3に示すように、地物配置区間Aは、基本的に、交差点70を車両3が直進するものとして設定されるため、地物配置区間Aの交差点70を挟んだ両側の各部分の延在方向は、互いに平行となる。なお、経路案内部83が経路案内を行っている場合には、案内経路に沿うように地物配置区間Aが設定される構成とすることができる。このような構成では、案内経路によっては、地物配置区間Aが交差点70において屈曲するように設定され、この場合、地物配置区間Aの交差点70を挟んだ両側の各部分の延在方向は互いに交差する方向となる。
【0068】
2−6.認識率決定部の構成
認識率決定部26は、地物情報FTと予測速度推移とに基づいて、地物配置区間Aに含まれる地物50の認識率Rを決定する機能部である。ここで、認識率Rは、地物50の画像認識に成功する割合を表す指標(成功率の推定値)である。このような認識率Rの決定機能を実現すべく、認識率決定部26は、基準認識率取得部31と補正係数決定部32とを備え、認識率決定部26は、基準認識率取得部31が取得した基準認識率RSを、補正係数決定部32が決定した補正係数Cにより補正した値を認識率Rに決定するように構成されている。本実施形態では、認識率決定部26は、基準認識率RSに補正係数Cを乗算する演算により、認識率Rを導出して決定する。なお、本実施形態では、認識率決定部26は、地物配置区間Aに含まれる地物50であって画像処理部22による画像認識処理において認識対象となり得る地物50(本例では図6に示すような道路標示)の全てについて、認識率Rを決定する。
【0069】
2−6−1.基準認識率取得部の構成
基準認識率取得部31は、認識率Rの決定対象の地物50についての基準認識率RSを取得する機能部である。本実施形態では、基準認識率RSは、地物50の種別と関連付けられて基準認識率記憶部11に記憶されており、基準認識率取得部31は、基準認識率記憶部11を参照して必要な基準認識率RSを取得する。
【0070】
ここで、基準認識率RSは、地物50の種別に応じて予め定められた、画像認識の平均的な成功率(成功確率)を表し、0以上であって1以下の値に設定される。図6に示す例では、進行方向標示51、第一停止線標示52、第二停止線標示53、第一交差点形状標示54、第二交差点形状標示55、及び横断歩道標示56のそれぞれの基準認識率RSが、「RS1」、「RS2」、「RS3」、「RS4」、「RS5」、及び「RS6」に設定されている。例えば、RS1を「0.6」、RS2を「0.8」、RS3を「0.7」、RS4を「0.7」、RS5を「0.8」、RS6を「0.7」に設定することができる。
【0071】
2−6−2.補正係数決定部の構成
補正係数決定部32は、予測速度推移決定部27が決定した予測速度推移に基づいて補正係数Cを決定する機能部である。この補正係数Cは、基準認識率RSを補正するための補正係数であり、具体的には、画像処理部22による地物50の画像認識処理を行う際の自車両3の速度に起因する補正を行うための補正係数である。本実施形態では、補正係数Cが、本発明における「速度要因補正係数」に相当する。
【0072】
上述したように、本実施形態では、地物50の認識率Rには、当該地物50の撮影時における車速が低くなるに従って低下するとともに、当該地物50の撮影時における自車両3の加速度が高くなるに従って低下するという傾向が生じる。この傾向に鑑み、本実施形態では、補正係数決定部32は、予測速度推移が示す自車両3の速度が低くなるに従って認識率Rを低くするように補正係数Cを決定するとともに、予測速度推移が示す自車両3の加速度が高くなるに従って認識率Rを低くするように補正係数Cを決定する。そして、本実施形態では上記のように、認識率Rは、基準認識率RSに補正係数Cを乗算した値とされる。そのため、補正係数Cは、予測速度推移が示す自車両3の速度が低くなるに従って小さくなる値に決定されるとともに、予測速度推移が示す自車両3の加速度が高くなるに従って小さくなる値に決定される。
【0073】
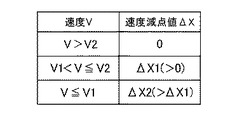
補正係数決定部32は、補正係数設定規則に基づき補正係数Cを決定する。この際、自車両3の車速や加速度に対する上記のような傾向を考慮して補正係数Cを決定すべく、本実施形態では、補正係数設定規則は、速度減点値設定規則と加速度減点値設定規則とから構成されている。ここで、速度減点値設定規則は、図7に一例を示すように、速度Vに対応付けて速度減点値ΔXを規定しており、速度Vが低くなるに従って大きな速度減点値ΔXが規定されている。図7に示す例では、速度Vが3つの速度域に区分されており、第二基準速度V2より大きな速度Vに対しては速度減点値ΔXとして「0」が規定され、第二基準速度V2以下であるとともに第一基準速度V1(<V2)より大きな速度Vに対しては速度減点値ΔXとして正の値の「ΔX1」が規定され、第一基準速度V1以下の速度Vに対しては速度減点値ΔXとしてΔX1より大きな「ΔX2」が規定されている。例えば、V1を10〔km/h〕、V2を20〔km/h〕、ΔX1を「0.1」、ΔX2を「0.2」とすることができる。
【0074】
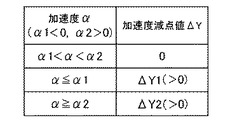
また、加速度減点値設定規則は、図8に一例を示すように、加速度αに対応づけて加速度減点値ΔYを規定しており、加速度αが加速側或いは減速側に高くなる(すなわち、絶対値が大きくなる)に従って大きな加速度減点値ΔYが規定されている。図8に示す例では、加速度αが3つの加速度域に区分されており、第一基準加速度α1(<0)より大きく第二基準加速度α2(>0)より小さな加速度αに対しては加速度減点値ΔYとして「0」が規定され、第一基準加速度α1以下の加速度αについては加速度減点値ΔYとして正の値の「ΔY1」が規定され、第二基準加速度α2以上の加速度αについては加速度減点値ΔYとして正の値の「ΔY2」が規定されている。例えば、α1及びα2の双方を0.1〔G〕、ΔY1及びΔY2の双方を「0.1」とすることができる。
【0075】
そして、補正係数決定部32は、認識率Rの決定対象の地物50の配置位置における予測速度推移が示す自車両3の速度及び加速度に対応する速度減点値ΔX及び加速度減点値ΔYを図7及び図8に基づき決定し、補正係数Cを、「1」からΔX及びΔYの双方を減算した値(1−ΔX−ΔY)に決定する。
【0076】
図2に示す例について具体的に説明すると、進行方向標示51の配置位置である第一地点P1において、予測速度推移が示す速度は「Va」であるとともに、予測速度推移が示す加速度は「0」である。そして、図2に示す例ではVa>V2であるため、速度減点値ΔX及び加速度減点値ΔYの双方は「0」となり、補正係数Cは「1」に決定される。よって、進行方向標示51の認識率Rは、その基準認識率RSである「RS1」と同一の値に決定される。一方、第一停止線標示52については、当該第一停止線標示52の配置位置である第二地点P2において、予測速度推移が示す速度は「Vc」であるとともに、予測速度推移が示すか加速度は「αa」である。そして、図2に示す例ではVc<V1であるとともにαa≦α1であるため、速度減点値ΔXは「ΔX2」となり、加速度減点値ΔYは「ΔY1」となる。よって、第一停止線標示52の認識率Rは、その基準認識率RSである「RS2」よりも小さな値に決定される。
【0077】
具体的な数値例を用いて更に説明すると、RS1=0.6、RS2=0.8、ΔX2=0.2、ΔY1=0.1である場合には、進行方向標示51については、基準認識率RS及び認識率Rの双方が「0.6」となる。一方、第一停止線標示52については、基準認識率RSが「0.8」であるのに対し、補正係数Cが「0.7」となるため認識率Rは「0.56」となる。よって、基準認識率RS同士を比較した場合には第一停止線標示52の方が値が大きくなるのに対し、予測速度推移が考慮された認識率R同士を比較した場合には進行方向標示51の方が値が大きくなる。
【0078】
ところで、本実施形態では、画像認識処理における認識対象部分の全体に亘って道路の延在方向Lの位置に関わらず同じ形状である地物50(以下、「特定地物」という。)については、認識率決定部26は、補正係数Cによる補正量を低減して認識率Rを決定する例外処理を実行するように構成されている。具体的には、図6に示す横断歩道標示56は、符号「50a」で示すハッチング部分が画像認識処理における認識対象部分とされ、当該認識対象部分50aを除く部分(道路の延在方向Lに直交する道路幅方向に延びる部分)は、画像認識の成否の判定には考慮されない。すなわち、この横断歩道標示56は上記の特定地物とされ、認識率Rの決定に際して、補正係数Cによる補正量を低減する例外処理が実行される。例えば、図3に示す横断歩道標示56については、例外処理を実行しない場合の補正係数Cは、(1−ΔY2)となるが、例外処理が実行されることで、補正係数Cの値が、(1−ΔY2)より大きく1以下の値(例えば「1」)に決定される。
【0079】
このような例外処理を実行する理由について以下に説明する。上記のように、本実施形態では、認識対象の地物50が撮影された複数のフレームを、撮影時の車速に応じて合成して画像認識を行うため、車速に誤差が含まれると、合成して得られる地物50の形状が、実際の地物の形状を、道路の延在方向Lに沿って長く或いは短くした形状となる。この点に関し、上記の特定地物の場合には、同一地物内で延在方向Lに沿って異なる位置にある部分の位置関係についてのパターンマッチング処理における一致度の判定要件を他の地物50に比べて緩和しても、画像認識を適切に行うことができる。このような理由で、本実施形態では、上記の特定地物については例外処理を実行する構成を採用している。
【0080】
なお、図6に示す例では、第一停止線標示52及び第二停止線標示53も、上記の特定地物となり得るため、横断歩道標示56と同様に、上記例外処理が実行される構成とすることができる。なお、上記の特定地物について上記例外処理が実行されない構成とすることも可能である。
【0081】
2−7.認識対象決定部の構成
認識対象決定部25は、画像処理部22による画像認識処理において認識対象とする地物50(以下、「認識対象地物」という。)を認識率Rに基づき決定する機能部である。本実施形態では、地物配置区間A内に、認識率決定部26により認識率Rが決定された地物50が複数存在する場合には、認識率Rが最も高い地物50を、認識対象地物に決定する。また、本実施形態では、地物配置区間A内に、認識率決定部26により認識率Rが決定された地物50が1つだけ存在する場合には、当該地物50を認識対象地物に決定する。
【0082】
なお、認識対象地物として選択するための認識率Rの条件として下限値を設定し、認識率Rが当該下限値以上の地物50が地物配置区間A内に存在しない場合には、何れの地物50も認識対象地物として選択しない構成とすることも可能である。また、地物配置区間A内において1つの地物50が画像認識された場合に、当該地物配置区間Aに含まれる他の地物50についての画像認識を更に行う構成とすることも可能である。
【0083】
3.動作処理の手順
次に、図9及び図10を参照して、本実施形態に係る自車位置認識ユニット2において実行される自車位置認識処理の手順、すなわち、自車位置認識方法について説明する。以下に説明する自車位置認識処理の手順は、上記のナビゲーション装置1(自車位置認識ユニット2)の各機能部を構成するハードウェア又はソフトウェア(プログラム)或いはその両方により実行される。上記の各機能部がプログラムにより構成される場合には、ナビゲーション装置1が有する演算処理装置が、上記の各機能部を構成するプログラムを実行するコンピュータとして動作する。なお、図10は、図9のステップ#04の推定自車位置補正処理の手順を示すフローチャートである。
【0084】
3−1.自車位置認識処理の全体手順
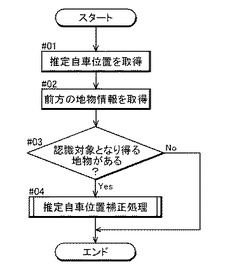
図9に示すように、推定自車位置取得部21が推定自車位置EPを取得すると(ステップ#01)、地図情報取得部23が、車両3の前方に設定される所定の探索範囲内に配置された地物50の情報(地物情報FT)を取得し、当該探索範囲内において、画像処理部22による画像認識処理において認識対象となり得る地物50の探索を行う(ステップ#02)。そして、探索範囲内に認識対象となり得る地物50があった場合には(ステップ#03:Yes)、図10に基づき後に説明する推定自車位置補正処理を実行する(ステップ#04)。一方、探索範囲内に認識対象となり得る地物50がなかった場合には(ステップ#03:No)、処理は終了する。なお、この自車位置認識処理は、所定のタイミングで繰り返し実行される。
【0085】
3−2.推定自車位置補正処理の手順
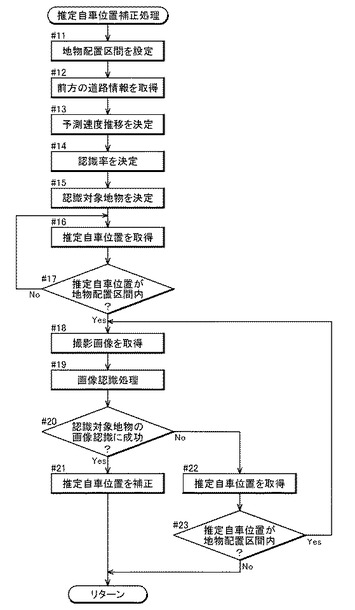
次に、図10を参照して、図9のステップ#04における推定自車位置補正処理について説明する。図9のステップ#02で取得された地物情報FTに基づき地物配置区間Aが設定された後(ステップ#11)、車両3の前方にある当該地物配置区間Aの道路情報RDが地図情報取得部23により取得される(ステップ#12)。そして、この道路情報RDに基づき、予測速度推移決定部27が当該地物配置区間A内での予測速度推移を決定する(ステップ#13)。次に、認識率決定部26が、ステップ#13にて決定された予測速度推移と、図9のステップ#02で取得された地物情報FTとに基づき、認識率Rを決定し(ステップ#14)、当該決定された認識率Rに基づき、認識対象決定部25が、画像処理部22による画像認識処理において認識対象とする地物50である認識対象地物を決定する(ステップ#15)。そして、この決定された認識対象地物についての画像認識処理が、ステップ#16以降の処理で実行される。
【0086】
具体的には、推定自車位置取得部21が取得した推定自車位置EP(ステップ#16)が、画像認識処理を行う範囲である画像認識区間(本例では、地物配置区間Aと同一)に進入すると(ステップ#17:Yes)、画像処理部22が、撮影画像PGを取得するとともに(ステップ#18)、ステップ#15にて決定された認識対象地物の画像認識処理を実行する(ステップ#19)。そして、認識対象地物が画像認識された場合(画像認識に成功した場合)には(ステップ#20:Yes)、当該認識対象地物の地物情報FTに基づき、推定自車位置EPの補正処理が実行される(ステップ#21)。一方、認識対象地物が画像認識されなかった場合(画像認識に失敗した場合)には(ステップ#20:No)、推定自車位置取得部21が取得する推定自車位置EP(ステップ#22)が地物配置区間A内に位置することを条件に(ステップ#23:Yes)、ステップ#18からの処理が繰り返し実行される。
【0087】
4.その他の実施形態
最後に、本発明に係る自車位置認識システムの、その他の実施形態について説明する。なお、以下のそれぞれの実施形態で開示される構成は、矛盾が生じない限り、他の実施形態で開示される構成と組み合わせて適用することが可能である。
【0088】
(1)上記の実施形態で参照した図4に示す例では、速度予測値設定規則が、4つに区分された道路部分のそれぞれについての速度予測値を規定する構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、速度予測値設定規則が、2つ、3つ、或いは5つ以上に区分された道路部分のそれぞれについての速度予測値を規定する構成とすることもできる。例えば、速度予測値設定規則が、「非交差点区間(巡航区間)」、「非優先交差点」、及び「優先交差点」の3つの道路部分についての速度予測値を規定する構成とすることも可能である。この場合、「非交差点区間」は、図4の「直線区間」と「カーブ区間」とを統合したものに相当し、「非交差点区間」に対応する速度予測値は、上述した「直線区間」や「カーブ区間」に対応する速度予測値と同様に設定することが可能である。また、例えば、直線区間やカーブ区間について規定される速度予測値が更に細分化され、車線数や道路の勾配、或いは横断歩道の有無等にも基づいて、速度予測値が規定された構成とすることもできる。さらに、交差点70以外の特定の地点(例えば、踏切や料金所等)についての速度予測値が規定された構成とすることもできる。
【0089】
(2)上記の実施形態で参照した図5に示す例では、加速度予測値設定規則により、2つの走行条件(「減速」及び「加速」)についての加速度予測値が規定された構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、「減速」及び「加速」の少なくとも一方を細分化し、加速度予測値設定規則が、3つ以上の走行条件についての加速度予測値を規定する構成とすることも可能である。例えば、加速度予測値設定規則が、減速について「第一減速」及び「第二減速」の2つに対応する加速度予測値を規定する場合には、交差点種別や横断歩道の有無等に基づき、「第一減速」及び「第二減速」のいずれかが選択される構成とすることができる。加速についても同様である。
【0090】
(3)上記の実施形態で参照した図7に示す例では、速度Vが3つの速度域に区分された構成を例として説明したが、速度Vが2つ或いは4つ以上の速度域に区分された構成とすることも可能である。同様に、上記の実施形態で参照した図8に示す例では、加速度αが3つの加速度域に区分された構成を例として説明したが、加速度αが2つ或いは4つ以上の加速度域に区分された構成とすることも可能である。
【0091】
(4)上記の実施形態では、補正係数決定部32が、図7に示すような速度減点値設定規則と、図8に示すような加速度減点値設定規則とに基づき、補正係数Cを決定する構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、補正係数決定部32が、以下の式(1)に基づき補正係数Cを導出して、補正係数Cを決定する構成とすることもできる。
C=1−Z1/V−Z2×α・・・(1)
ここで、「V」は自車両3の速度を表し、「α」は自車両3の加速度を表す。また、「Z1」及び「Z2」は、速度及び加速度についての重み付け係数であり、例えば、ナビゲーション装置1の性能に基づいて設定される構成とすることができる。また、「Z1」及び「Z2」を、学習値とすることも可能である。
また、自車両3の速度及び加速度と補正係数Cとの関係を規定した補正係数マップが記憶装置に記憶されており、当該記憶装置を参照して補正係数決定部32が補正係数Cを決定する構成とすることも可能である。
【0092】
(5)上記の実施形態では、補正係数決定部32が、予測速度推移が示す自車両3の速度及び加速度の双方に基づき補正係数Cを決定する構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、補正係数決定部32が、予測速度推移が示す自車両3の速度及び加速度のいずれか一方のみ(例えば速度のみ)に基づき補正係数Cを決定する構成とすることもできる。
【0093】
(6)上記の実施形態では、予測速度推移における加減速の開始地点や終了地点が、交差点70の位置、加速度予測値(図5参照)、及び速度予測値(図4参照)に基づき定まる構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、加減速の開始地点或いは終了地点に関する設定規則が備えられ、予測速度推移における加速度が、予め定められた規則ではなく、交差点70の位置、加減速の開始地点或いは終了地点、及び速度予測値(図4参照)に基づき定まる構成とすることも可能である。
【0094】
(7)上記の実施形態では、予測速度推移決定部27が、道路情報RDに基づいて地物配置区間A内での予測速度推移を決定する構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、少なくとも道路情報RDに基づくのであれば、予測速度推移決定部27が更に別の単数又は複数の情報にも基づいて予測速度推移を決定する構成とすることも可能である。例えば、予測速度推移決定部27が、道路情報RDと自車両3の現在の走行状態(例えば車速等)との双方に基づいて、或いは、道路情報RDと地物配置区間Aにおける渋滞情報との双方に基づいて、予測速度推移を決定する構成とすることができる。
【0095】
(8)上記の実施形態では、基準認識率RSが、地物50の種別に応じて予め定められた構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、基準認識率RSが、地物50の種別に加えて単数又は複数の他の情報にも基づき定められた構成とすることも可能である。このような他の情報は、例えば、地物50のかすれの状態の情報、地物50に対する日照の状態(例えば日向と日陰のいずれに含まれるか等)の情報、或いは気象条件や時刻等の情報とすることができる。
【0096】
(9)上記の実施形態では、予測速度推移決定部27が、地物配置区間Aに交差点70が含まれる場合には、当該交差点70を通過する際の自車両3の速度が当該交差点70の種別に応じた種別依存速度となるように予測速度推移を決定する構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、予測速度推移の決定に際し、交差点70の有無を考慮しない構成とすることも可能である。
【0097】
(10)上記の実施形態では、認識率決定部26が、基準認識率RSに補正係数Cを乗算する演算により、認識率Rを導出して決定する構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、基準認識率RS及び補正係数Cと認識率Rとの関係を規定した認識率マップが記憶装置に記憶されており、当該記憶装置を参照して認識率決定部26が認識率Rを決定する構成とすることもできる。また、上記の実施形態では、認識率Rが、基準認識率RSに補正係数Cを乗算した値とされる構成を例として説明したが、認識率Rが、基準認識率RSに補正係数Cを除算した値とされる構成や、認識率Rが、基準認識率RSに補正係数Cを加算或いは減算した値とされる構成とすることも可能である。
【0098】
(11)上記の実施形態では、地物配置区間Aが、道路の延在方向Lに分かれて配置されるとともに、隣り合う地物50の当該延在方向Lに沿った間隔Sが所定距離T以下である一群の地物については、当該一群の地物を構成する全ての地物50を含むように設定される構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、画像認識処理を行う範囲である認識要求範囲が、道路の延在方向Lに沿うように地物50毎に設定される構成では、隣り合う地物50の認識要求範囲同士が互いに重複する一群の地物について、当該一群の地物を構成する全ての地物50を含むように地物配置区間Aが設定される構成とすることができる。
【0099】
(12)上記の実施形態では、画像認識処理を行う範囲を定める画像認識区間が、地物配置区間Aと一致する構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、画像認識区間が、地物配置区間Aとは独立に設定される構成とすることも可能である。この場合、地物配置区間Aを、地物50が占める道路区間に合わせて設定する(すなわち、上述した第一所定距離や第二所定距離を零に設定する)ことも可能である。また、この場合、画像認識区間は、例えば、上記認識要求範囲に基づき設定される構成とすることができる。
【0100】
(13)上記の実施形態では、推定自車位置EPの補正のための画像認識において対象となる地物50が、路面に設けられた道路標示である構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、信号機のような立体的な地物50を、推定自車位置EPの補正のために利用することも可能である。この場合、車両3へのカメラ90の設置形態は、当該立体的な地物50の画像認識が可能となるように設定される。
【0101】
(14)上記の実施形態では、カメラ90が車両3の後方を撮影するバックカメラである構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、カメラ90が車両3の前方を撮影するフロントカメラや、車両3の側方を撮影するサイドカメラとされた構成とすることも可能である。
【0102】
(15)上記の実施形態では、本発明に係る自車位置認識システムを車載用のナビゲーション装置1に適用した場合を例として説明したが、このようなナビゲーション装置1は、車両3に固定的に搭載されたものに限らず、任意に移動可能なポータブルナビゲーション装置であって、使用時にのみ車両3に持ち込まれるようなものであっても良い。
【0103】
(16)上記の実施形態では、本発明に係る自車位置認識システムをナビゲーション装置1に適用した場合を例として説明したが、本発明に係る自車位置認識システムを、車両に備えられるその他の装置(走行制御装置等)に適用することも可能である。
【0104】
(17)上記の実施形態において説明した機能部の割り当ては単なる一例であり、複数の機能部を組み合わせたり、1つの機能部をさらに区分けしたりすることも可能である。ま
た、上記の実施形態では、自車位置認識ユニット2を構成する各機能部、及び各記憶部10,11が車両3に備えられる構成を例として説明したが、自車位置認識ユニット2の少なくとも一部の機能部や、記憶部10,11の少なくとも一部が、車両3の外部(例えばサーバ装置等)に設けられ、インターネット等の通信ネットワークを介して情報や信号の送受信が行われる構成とすることもできる。
【0105】
(18)その他の構成に関しても、本明細書において開示された実施形態は全ての点で例示であって、本発明の実施形態はこれに限定されない。すなわち、本願の特許請求の範囲に記載されていない構成に関しては、本発明の目的を逸脱しない範囲内で適宜改変することが可能である。
【産業上の利用可能性】
【0106】
本発明は、自車両に備えられたカメラによる撮影画像を用いて自車位置を認識する自車位置認識システム、自車位置認識プログラム、及び自車位置認識方法に好適に利用することができる。
【符号の説明】
【0107】
3:車両(自車両)
21:推定自車位置取得部
22:画像処理部
23a:地物情報取得部
23b:道路情報取得部
24:推定自車位置補正部
25:認識対象決定部
26:認識率決定部
27:予測速度推移決定部
31:基準認識率取得部
32:補正係数決定部
50:地物
50a:認識対象部分
60:走行道路
61:他の道路
70:交差点
90:カメラ
A:地物配置区間
C:補正係数(速度要因補正係数)
EP:推定自車位置
FT:地物情報
L:延在方向
PG:撮影画像
R:認識率
RD:道路情報
RS:基準認識率
S:間隔
T:所定距離
Vc:第三予測速度(種別依存速度)
Vd:第四予測速度(種別依存速度)
【技術分野】
【0001】
本発明は、自車両に備えられたカメラによる撮影画像を用いて自車位置を認識する自車位置認識システム、自車位置認識プログラム、及び自車位置認識方法に関する。
【背景技術】
【0002】
上記のような自車位置認識システムの従来技術として、例えば特開2009−58429号公報(特許文献1)に記載された技術がある。特許文献1には、カメラによる撮影画像に含まれる地物の画像認識処理を行い、画像認識の結果と当該地物の位置情報とに基づき、推定自車位置を補正する技術が記載されている。この際、画像認識処理において認識対象とされる地物は、各地物の画像認識に成功する割合である認識率に基づいて決定される。具体的には、認識対象となり得る複数の地物が狭い間隔で配置されている場合に、認識率が高い地物を認識対象の地物として選択する。これにより、画像認識処理に係る演算負荷を低減しつつ、一定距離あたりの地物の認識率を高めることが可能となっている。
【0003】
ところで、地物を撮影するカメラは車両に備えられているため、画像認識の手法や画像認識装置の性能等によっては、同じ種別の地物に対する認識率が、当該地物の撮影時の自車両の速度に応じて変化することが想定される。しかし、このような自車両の速度に関して、特許文献1では特段の認識がなされていなかった。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−58429号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
そこで、画像認識処理における認識対象を決定するための地物の認識率を、当該地物の撮影時の自車両の速度を考慮して決定することが可能な技術の実現が望まれる。
【課題を解決するための手段】
【0006】
本発明に係る、自車両の推定位置である推定自車位置を取得する推定自車位置取得部と、前記自車両に備えられたカメラにより撮影された撮影画像を取得し、当該撮影画像に含まれる地物の画像認識処理を行う画像処理部と、地物の位置情報及び種別情報を含む地物情報を取得する地物情報取得部と、前記画像認識処理による地物の認識結果と前記地物情報に含まれる地物の位置情報とに基づき前記推定自車位置を補正する推定自車位置補正部と、を備えた自車位置認識システムの特徴構成は、道路情報を取得する道路情報取得部と、地物が配置された道路区間である地物配置区間に前記推定自車位置が進入する前に、少なくとも前記道路情報に基づいて、前記地物配置区間内での前記自車両の速度推移の予測を示す予測速度推移を決定する予測速度推移決定部と、前記地物情報と前記予測速度推移とに基づいて、前記地物配置区間に含まれる地物の画像認識に成功する割合である認識率を決定する認識率決定部と、前記画像認識処理において認識対象とする地物を前記認識率に基づき決定する認識対象決定部と、を備える点にある。
【0007】
上記の特徴構成によれば、地物の認識率を、地物情報に加えて、当該地物の撮影時の自車両の速度(速度の時間微分である加速度を含む)にも基づき決定することができる。この際、本発明では、一時停止義務のある交差点では車両が停止することが予測される等のように、自車両の速度推移が道路情報によって予測できることに着目して、認識率の決定に用いられる自車両の速度を、推定自車位置が地物配置区間に進入する前に道路情報に基づき決定される予測速度推移から得る構成を採用している。これにより、地物の撮影時の自車両の速度に応じた実際の認識率に近い認識率を、事前に推定することが可能となっている。
このように、上記の特徴構成によれば、画像認識処理における認識対象を決定するための地物の認識率を、当該地物の撮影時の自車両の速度を考慮して、事前に適切に決定することが可能となっている。
【0008】
ここで、前記道路情報は、交差点の有無及び交差点の種別を特定するための情報を含み、前記予測速度推移決定部は、前記地物配置区間に交差点が含まれる場合には、当該交差点を通過する際の前記自車両の速度が当該交差点の種別に応じた種別依存速度となるように前記予測速度推移を決定する構成とすると好適である。
【0009】
具体的には、例えば、前記地物配置区間に含まれる前記交差点への進入前に前記自車両が走行する走行道路が、前記交差点において当該走行道路に交差する他の道路に対する優先道路である場合の前記種別依存速度が、前記他の道路が前記走行道路に対する優先道路である場合の前記種別依存速度よりも高い値に決定される構成とすることができる。
【0010】
このような構成によれば、交差点の通行に際して予想される自車両の挙動を適切に考慮して予測速度推移を決定することができ、当該予測速度推移に基づき決定される認識率の信頼性を高めることができる。
【0011】
上記の各構成の自車位置認識システムにおいて、前記予測速度推移に基づいて、前記画像処理部による地物の画像認識処理を行う際の前記自車両の速度に起因する前記認識率に関する補正係数である速度要因補正係数を決定する補正係数決定部を更に備え、前記認識率決定部は、地物の種別に応じて予め定められた基準認識率を、前記速度要因補正係数により補正した値を前記認識率に決定する構成とすると好適である。
【0012】
この構成によれば、認識率を簡素な構成で導出することができるため、必要に応じて認識率を演算して決定する場合に、当該演算に係る負荷を低減することができる。また、認識率を予め演算して記憶装置に整備しておく場合には、当該整備に係るコストを低減することができる。
【0013】
上記のように、前記基準認識率を前記速度要因補正係数により補正した値を前記認識率に決定する構成において、前記補正係数決定部は、前記予測速度推移が示す前記自車両の加速度が高くなるに従って前記認識率を低くするように前記速度要因補正係数を決定する構成とすると好適である。
【0014】
この構成によれば、自車両の加速度が高くなるに従って速度の検出精度が低くなる傾向がある速度検出システムを用いる場合に、認識率を適切に決定することが可能となる。
【0015】
また、上記のように、前記基準認識率を前記速度要因補正係数により補正した値を前記認識率に決定する構成において、前記補正係数決定部は、前記予測速度推移が示す前記自車両の速度が低くなるに従って前記認識率を低くするように前記速度要因補正係数を決定する構成とすると好適である。
【0016】
この構成によれば、例えば車速パルスセンサ等の、自車両の速度が低くなるに従って速度の検出精度が低くなる傾向があるセンサを用いる場合に、認識率を適切に決定することが可能となる。
【0017】
また、上記のように、前記基準認識率を前記速度要因補正係数により補正した値を前記認識率に決定する構成において、前記認識率決定部は、路面上に設けられた地物であって、前記画像認識処理における認識対象部分の全体に亘って道路の延在方向の位置に関わらず同じ形状である地物については、前記速度要因補正係数による補正量を低減して前記認識率を決定する構成とすると好適である。
【0018】
この構成によれば、同一地物内で道路の延在方向に沿って異なる位置にある部分の位置関係が、当該地物の画像認識の成否に大きく影響しない地物について、現状により即した認識率を決定することが可能となる。
【0019】
上記の各構成の自車位置認識システムにおいて、道路の延在方向に分かれて配置されるとともに、隣り合う地物の当該延在方向に沿った間隔が所定距離以下である一群の地物については、当該一群の地物を構成する全ての地物を含むように前記地物配置区間が設定される構成とすると好適である。
【0020】
この構成によれば、予測速度推移決定部が決定した予測速度推移に基づき、一群の地物を構成する各地物の認識率を決定することができるため、認識率を決定するための構成の簡素化を図ることができる。
【0021】
以上の各構成を備えた本発明に係る自車位置認識システムの技術的特徴は、自車位置認識プログラムや自車位置認識方法にも適用可能であり、本発明はそのようなプログラムや方法も権利の対象とすることができる。
【0022】
その場合における、自車位置認識プログラムの特徴構成は、自車両の推定位置である推定自車位置を取得する推定自車位置取得機能と、前記自車両に備えられたカメラにより撮影された撮影画像を取得し、当該撮影画像に含まれる地物の画像認識処理を行う画像処理機能と、地物の位置情報及び種別情報を含む地物情報を取得する地物情報取得機能と、前記画像認識処理による地物の認識結果と前記地物情報に含まれる地物の位置情報とに基づき前記推定自車位置を補正する推定自車位置補正機能と、を実現させるための自車位置認識プログラムであって、道路情報を取得する道路情報取得機能と、地物が配置された道路区間である地物配置区間に前記推定自車位置が進入する前に、少なくとも前記道路情報に基づいて、前記地物配置区間内での前記自車両の速度推移の予測を示す予測速度推移を決定する予測速度推移決定機能と、前記地物情報と前記予測速度推移とに基づいて、前記地物配置区間に含まれる地物の画像認識に成功する割合である認識率を決定する認識率決定機能と、前記画像認識処理において認識対象とする地物を前記認識率に基づき決定する認識対象決定機能と、をコンピュータに実現させる点にある。
【0023】
また、自車位置認識方法の特徴構成は、自車両の推定位置である推定自車位置を取得する推定自車位置取得ステップと、前記自車両に備えられたカメラにより撮影された撮影画像を取得し、当該撮影画像に含まれる地物の画像認識処理を行う画像処理ステップと、地物の位置情報及び種別情報を含む地物情報を取得する地物情報取得ステップと、前記画像認識処理による地物の認識結果と前記地物情報に含まれる地物の位置情報とに基づき前記推定自車位置を補正する推定自車位置補正ステップと、を備えた自車位置認識方法であって、道路情報を取得する道路情報取得ステップと、地物が配置された道路区間である地物配置区間に前記推定自車位置が進入する前に、少なくとも前記道路情報に基づいて、前記地物配置区間内での前記自車両の速度推移の予測を示す予測速度推移を決定する予測速度推移決定ステップと、前記地物情報と前記予測速度推移とに基づいて、前記地物配置区間に含まれる地物の画像認識に成功する割合である認識率を決定する認識率決定ステップと、前記画像認識処理において認識対象とする地物を前記認識率に基づき決定する認識対象決定ステップと、を備える点にある。
【0024】
当然ながら、これらの自車位置認識プログラムや自車位置認識方法も上述した自車位置認識システムに係る作用効果を得ることができ、更に、その好適な構成の例として挙げたいくつかの付加的技術を組み込むことが可能である。
【図面の簡単な説明】
【0025】
【図1】本発明の実施形態に係るナビゲーション装置の概略構成を示す模式図である。
【図2】本発明の実施形態に係る車両の走行状況の一例を示す模式図であり、(a)はノードとリンクとが表す道路ネットワークを示し、(b)は(a)に対応する道路及び当該道路に設けられた地物を示し、(c)は(b)に示す地物配置区間内での予測速度推移を示す。
【図3】本発明の実施形態に係る車両の走行状況の別の一例を示す模式図であり、(a)はノードとリンクとが表す道路ネットワークを示し、(b)は(a)に対応する道路及び当該道路に設けられた地物を示し、(c)は(b)に示す地物配置区間内での予測速度推移を示す。
【図4】本発明の実施形態に係る速度予測値設定規則の一例を示す図である。
【図5】本発明の実施形態に係る加速度予測値設定規則の一例を示す図である。
【図6】本発明の実施形態に係る基準認識率記憶部に記憶されている情報の一例を示す概念図である。
【図7】本発明の実施形態に係る速度減点値設定規則の一例を示す図である。
【図8】本発明の実施形態に係る加速度減点値設定規則の一例を示す図である。
【図9】本発明の実施形態に係る自車位置認識処理の全体手順の一例を示すフローチャートである。
【図10】本発明の実施形態に係る推定自車位置補正処理の手順の一例を示すフローチャートである。
【発明を実施するための形態】
【0026】
本発明の実施形態について、図面を参照して説明する。ここでは、本発明に係る自車位置認識システムを、車載用のナビゲーション装置に適用した場合を例として説明する。本実施形態に係るナビゲーション装置1は、図1に示すように自車位置認識ユニット2を備え、この自車位置認識ユニット2を中核として自車位置認識システムが構築されている。
【0027】
以下の説明における「進行方向前方D1」及び「進行方向後方D2」(図2、図3参照)は、自車両3(以下、「車両3」という場合がある。)が道路の延在方向L(道路長さ方向)に沿って前進走行している状態を基準として定義している。よって、「進行方向前方D1」は車両3の前方へ向かう方向を指し、「進行方向後方D2」は車両3の後方へ向かう方向を指す。
【0028】
1.ナビゲーション装置の概略構成
図1に示すように、ナビゲーション装置1は、自車位置認識ユニット2と、制御ユニット80と、推定自車位置決定部94と、地図情報記憶部10と、基準認識率記憶部11と、を備えている。自車位置認識ユニット2及び制御ユニット80は、複数の機能部を備えている。
【0029】
ナビゲーション装置1が備える各機能部は、互いに共通の或いはそれぞれ独立のCPU等の演算処理装置を中核部材として、入力されたデータに対して種々の処理を行うための機能部がハードウェア又はソフトウェア(プログラム)或いはその両方により実装されて構成されている。また、これらの機能部は、通信線を介して互いに情報の受け渡しを行うことができるように構成されているとともに、各記憶部10,11からデータを抽出可能に構成されている。ここで、各機能部がソフトウェア(プログラム)により構成される場合には、当該ソフトウェアは、演算処理装置が参照可能な記憶装置に記憶される。
【0030】
地図情報記憶部10及び基準認識率記憶部11は、記憶装置により構成されるデータベースである。この記憶装置は、例えば、ハードディスクドライブやフラッシュメモリ等のように、情報を記憶及び書き換え可能な記録媒体をハードウェア構成として備える。なお、各記憶部10,11は、それぞれ独立のハードウェアを有していても良いし、共通のハードウェアに備えられていても良い。
【0031】
制御ユニット80は、経路設定部81、経路探索部82、及び経路案内部83を備えている。経路設定部81は、例えば自車位置等の出発地、入力された目的地、通過地点や走行条件(高速道路の使用有無など)を設定する機能部である。経路探索部82は、経路設定部81によって設定された条件に基づき、出発地から目的地までの案内経路を探索するための演算処理(経路探索処理)を行う機能部である。経路案内部83は、経路探索部82により探索された出発地から目的地までの経路に従って、モニタ(図示せず)の表示画面による案内標示やスピーカ(図示せず)による音声案内等により、運転者に対して適切な経路案内を行うための演算処理(経路案内処理)を行う機能部である。
【0032】
地図情報記憶部10には、上記の経路探索処理や経路案内処理を実行する際や、モニタへの地図表示処理を実行する際等に参照される地図情報(道路地図データ)が記憶(格納)されている。具体的には、地図情報は、道路ネットワークを表す道路情報RDと、この道路情報RDに関連付けられた地物情報FTとを有して構成されている。すなわち、地図情報記憶部10は、道路情報RDを記憶する道路情報記憶部10bと、地物情報FTを記憶する地物情報記憶部10aとが一体的に形成されたものである。
【0033】
道路情報RDは、図2(a)に概念的に示すように、緯度及び経度で表現された地図上の位置情報を有する多数のノードNの情報と、2つのノードNを連結して道路に対応する経路を構成する多数のリンクKの情報とを有して構成されている。ノードNは、例えば、道路の交差点70(図2、図3参照)、折曲点、分岐点等に設定される。なお、交差点70は、合流地点や分岐地点を含む。道路情報RDには、ノードNの属性に関するノード情報と、リンクKの属性に関するリンク情報とが含まれている。そして、交差点70に設定されたノードNについては、当該ノードNのノード情報として、交差点種別の情報と信号機の有無の情報とが含まれている。このように、道路情報RDは、交差点70の有無及び交差点70の種別を特定するための情報を含んでいる。
【0034】
本例では、交差点種別には、交差点70の優先関係に基づく優先度種別が含まれ、この優先度種別の情報を参照することで、信号機の無い交差点70に接続される道路の間での通行に関する優先順位の情報を取得することが可能となっている。また、リンク情報には、2つのノードNの間(すなわちリンクK上)に配置されてリンクKの詳細形状を表す形状補間点、道路幅、道路種別(高速道路、有料道路、国道、県道等の種別)、制限速度(最高速度)、リンク長さ等の情報が含まれている。
【0035】
地物情報FTは、道路上や道路周辺に設けられた各種の地物50の情報である。地図情報記憶部10に地物情報FTが格納される地物50には道路標示が含まれ、本実施形態では更に、道路との相対位置が固定されている立体的な構造物(例えば、標識、信号機等)も含まれる。ここで、道路標示とは、ペイント等により路面に設けられた規制や指示のための記号や文字である。道路標示には、例えば、図6に示すように、進行方向を示す標示(進行方向標示51)、停止線を示す標示(自車線に設けられた第一停止線標示52、隣接車線(対向車線等)に設けられた第二停止線標示53)、交差点70の形状を示す標示(十字状の第一交差点形状標示54、T字状の第二交差点形状標示55)、横断歩道であることを示す標示(横断歩道標示56)等が含まれる。
【0036】
地物情報FTには、地物50の位置情報と種別情報とが含まれる。ここで、位置情報は、地物50の地図上の位置(緯度及び経度)を表す情報であり、本例では、ノードNや上記形状補間点を基準とした情報とされている。この位置情報は、基本的に、地物50の代表点(例えば地物50の長さ方向及び幅方向の中心)の位置を表す情報とされる。また、種別情報は、地物50の種別を表す情報であり、本例では、形状、色彩、道路幅方向の配置を含む形態が同一の地物50が、1つの種別として規定されている。具体的には、図6に示すように、互いに異なる形状の地物50が異なる種別に分類されているとともに、第一停止線標示52と第二停止線標示53とのように、同一形状であっても上記形態が異なるもの(具体的には、進行方向車線とは異なる車線に配置されているもの)は、異なる種別に分類されている。
【0037】
上記のような道路情報RD及び地物情報FTを有する地図情報は、データベース化され、地図情報記憶部10の仕様に応じた形態で格納されている。例えば、地図情報が、互いに関連付けられた複数のレイヤに分かれて地図情報記憶部10に格納された構成とすることができる。具体的には、道路間の接続情報を示す道路ネットワークレイヤ、道路形状を示す道路形状レイヤ、及び、道路上や道路周辺に設けられた各種の地物50の情報を示す地物レイヤを含む少なくとも3つのレイヤに分かれて地図情報が備えられた構成とすることができる。この場合、道路情報RDは、道路ネットワークレイヤ及び道路形状レイヤに格納された情報により構成され、地物情報FTは、地物レイヤに格納された情報により構成される。
【0038】
推定自車位置決定部94は、車両3に備えられたGPS測定ユニット91、距離センサ92、及び方位センサ93の出力に基づき、自車両3の推定位置である推定自車位置EPを決定する機能部である。具体的には、推定自車位置決定部94は、GPS測定ユニット91から取得したGPS(Global Positioning System)信号を解析することで、自車両3の現在位置(緯度及び経度)を導出してGPS位置データを得る。また、推定自車位置決定部94は、距離センサ92や方位センサ93から取得した移動距離情報と方位情報とに基づいて推測航法位置を導出して推測航法位置データを得る。そして、推定自車位置決定部94は、GPS位置データと推測航法位置データとから公知の方法により自車両3の推定位置である推定自車位置EPを導出する演算を行って推定自車位置EPを決定し、決定した推定自車位置EPの情報を自車位置認識ユニット2へ出力する。
【0039】
上記のように決定される推定自車位置EPは、測定誤差を含んだ情報となっており、場合によっては道路上から外れてしまう。本実施形態では、このような場合には地図情報記憶部10に記憶された道路地図データに基づき、推定自車位置決定部94が推定自車位置EPを道路地図に示される道路上に合わせるための補正(マップマッチング処理)を行い、当該補正後の推定自車位置EPの情報が自車位置認識ユニット2へ出力される。
【0040】
自車位置認識ユニット2は、推定自車位置決定部94から取得した推定自車位置EPを補正するための各機能部22〜27を備えている。自車位置認識ユニット2の構成については、後の「2.自車位置認識ユニットの構成」の項で詳細に説明するが、自車位置認識ユニット2は、車両3に備えられたカメラ90(図1〜図3参照)による撮影画像PGを用いて推定自車位置EPを補正することで、推定自車位置決定部94が決定する推定自車位置EPよりも高精度に、自車位置を認識することが可能となっている。
【0041】
本実施形態では、図2(b)、図3(b)に示すように、カメラ90は車両3の後方を撮影するバックカメラ(リアカメラ)とされ、カメラ90による撮影画像PGには車両3の後方(進行方向後方D2側)の路面が含まれる。具体的には、本実施形態では、カメラ90は主に路面が撮影されるように光軸に俯角(例えば30度程度)を有して車両3に設置されており、推定自車位置EPの補正のための画像認識において対象となる地物50は、路面に設けられた道路標示とされる。
【0042】
2.自車位置認識ユニットの構成
次に、本発明の要部である自車位置認識ユニット2の構成について説明する。図1に示すように、自車位置認識ユニット2は、推定自車位置取得部21、画像処理部22、地図情報取得部23、推定自車位置補正部24を備えるとともに、更に、予測速度推移決定部27、認識率決定部26、認識対象決定部25を備えている。
【0043】
2−1.推定自車位置取得部の構成
推定自車位置取得部21は、自車両3の推定位置である推定自車位置EPを取得する機能部である。本実施形態では、推定自車位置決定部94が決定した推定自車位置EPが推定自車位置取得部21に入力されることで、推定自車位置取得部21が推定自車位置EPを取得する。
【0044】
2−2.画像処理部の構成
画像処理部22は、自車両3に備えられたカメラ90により撮影された撮影画像PGを取得し、当該撮影画像PGに含まれる地物50の画像認識処理を行う機能部である。すなわち、画像処理部22は、画像取得機能と画像認識機能とを有している。画像処理部22による画像処理は、推定自車位置EPが、画像認識処理を行う範囲として道路の延在方向Lに沿って設定された画像認識区間内に位置する場合に実行される。この画像認識区間は、本実施形態では、後述する地物配置区間Aと基本的には一致する。
【0045】
画像処理部22による画像認識処理において認識対象とされる地物50は、画像認識された場合(すなわち画像認識に成功した場合)に少なくとも道路の延在方向Lの位置を特定することが可能な地物50とされる。そのため、区画線標示(図示せず)のような道路の延在方向Lに沿って連続的に或いは断続的に設けられる地物50は、基本的に、認識対象の地物50とはならない。図6に、認識対象とされ得る地物50の一例を示す。なお、図6に示す各地物50は、単一の道路標示から構成されているが、複数(例えば2つ)の道路標示により構成される地物50を、画像認識処理において認識対象とすることも可能である。画像認識処理において認識対象とする地物50は、後述する認識対象決定部25により決定される。
【0046】
カメラ90による所定の時間間隔毎の撮影画像PG(例えば、毎秒15〜30フレームの撮影画像PG)は図示しないバッファメモリに一時的に記憶され、画像処理部22は、このバッファメモリから撮影画像PGを取得する。本実施形態では、画像処理部22は、認識対象の地物50が撮影された複数のフレームを合成して、当該地物50の画像認識を行う。この際、画像処理部22は、距離センサ92から取得した車速情報に基づき、認識対象の地物50の撮影時の車速(自車両3の速度)に応じてフレームの合成を行う。画像処理部22による画像認識処理は、本実施形態では、撮影画像PGから取得される輪郭情報と、地物情報FTに含まれる認識対象の地物50の形状情報とに基づくパターンマッチング(テンプレートマッチング)手法を用いて実行される。
【0047】
上記のように、画像処理部22による画像認識処理において用いられる車速は、距離センサ92の検出結果に基づくものである。そして、本実施形態では、距離センサ92として、ドライブシャフトやホイール等が一定量回転する毎にパルス信号を出力する車速パルスセンサを用いたものが採用されている。そのため、距離センサ92による車速の検出精度(分解能)は、車速が低くなるに従って全体として低下する。また、画像処理部22が取得する車速と、当該取得の時点における現実の車速との間には、制御遅れ或いは検出遅れ等に起因して差異が生じ、当該差異の大きさは、自車両3の加速度が正方向側(加速側)又は負方向側(減速側)に高くなる(すなわち、絶対値が大きくなる)に従って一般的に大きくなる。
【0048】
よって、本実施形態では、画像処理部22が取得する車速に含まれ得る誤差の最大値は、車速が低くなるに従って大きくなるとともに、加速度が高くなるに従って大きくなる傾向がある。そして、車速に誤差が含まれると、複数のフレームを合成して得られる地物50の形状は、実際の地物50の形状を、道路の延在方向Lに沿って長く或いは短くした形状となる。このため、地物50の画像認識に成功する割合である認識率Rは、車速に含まれる誤差が大きくなるに従って低下するという傾向を有することになる。すなわち、地物50の撮影時における車速が低くなるに従って当該地物50の認識率Rが低下するとともに、地物50の撮影時における自車両3の加速度が高くなるに従って当該地物50の認識率Rが低下するという傾向が生じる。本実施形態では、このような認識率Rの自車両3の速度や加速度に応じた変化の傾向を考慮して、認識率決定部26が各地物50の認識率Rを決定するという構成を採用することで、各地物50についての認識率Rを適切に決定することが可能となっている。認識率決定部26の構成については後述する。
【0049】
2−3.地図情報取得部の構成
地図情報取得部23は、地物情報FT及び道路情報RDを取得する機能部である。本実施形態では、地図情報取得部23は、地図情報記憶部10を参照して地物情報FTや道路情報RDを取得する。具体的には、地図情報取得部23は、地図情報記憶部10(道路情報記憶部10b)を参照して道路情報RDを取得する道路情報取得部23bを備え、道路情報取得部23bが取得した道路情報RDは、予測速度推移決定部27による予測速度推移決定処理を含む、自車位置認識ユニット2で実行される各種処理において利用される。また、地図情報取得部23は、地図情報記憶部10(地物情報記憶部10a)を参照して地物情報FTを取得する地物情報取得部23aを備え、地物情報取得部23aが取得した地物情報FTは、画像処理部22による画像認識処理、推定自車位置補正部24による推定自車位置補正処理、認識率決定部26による認識率決定処理を含む、自車位置認識ユニット2で実行される各種処理において利用される。
【0050】
2−4.推定自車位置補正部の構成
推定自車位置補正部24は、画像処理部22の画像認識処理による地物50の認識結果と地物情報FTに含まれる地物50の位置情報とに基づき、推定自車位置EPを補正する機能部である。すなわち、推定自車位置補正部24は、画像処理部22による地物50の画像認識が成功した場合に、当該地物50の位置情報を用いて推定自車位置EPを補正する。本例では、推定自車位置補正部24は、推定自車位置EPの補正を、少なくとも道路の延在方向Lにおいて行う。
【0051】
具体的には、推定自車位置補正部24は、車両3へのカメラ90の設置形態に基づき、画像認識された地物50の位置と、当該地物50の撮影時の自車両3の位置との間の位置関係を演算する。この際、撮影画像PG中における地物50の位置や大きさ等が考慮される。そして、推定自車位置補正部24は、上記位置関係の演算結果と、地図情報取得部23が取得した地物情報FT(具体的には位置情報)とに基づく演算により、当該地物情報FTに基づく高精度の自車位置(地物依拠自車位置)を取得する。なお、上記位置関係の演算を行わずに、予め定めた固定的な位置関係を用いることも可能である。例えば、地物50の撮影時の自車両3の位置を、当該地物50の位置とすることや、当該地物50の位置に対して道路の延在方向Lに沿って所定距離(固定値)だけ離れた位置とすることが可能である。
【0052】
推定自車位置補正部24は、取得した地物依拠自車位置を推定自車位置EPと置き換えることで、推定自車位置EPの補正を行う。なお、単に位置を置き換えるのではなく、地物50の撮影時からの走行距離(距離センサ92から取得可能)を考慮して自車位置の調整を行う構成とすることも可能である。
【0053】
2−5.予測速度推移決定部の構成
予測速度推移決定部27は、道路情報RDに基づいて、地物50が配置された道路区間である地物配置区間A内での自車両3の速度推移の予測を示す予測速度推移を決定する機能部である。この予測速度推移の決定は、推定自車位置EPが当該予測速度推移の決定対象の地物配置区間Aに進入する前に実行される。すなわち、地物配置区間Aは、車両3に対して進行方向前方D1に設定される。また、予測速度推移決定部27が決定した予測速度推移は、後述する認識率決定部26による認識率Rの決定に用いられ、この認識率Rに基づき、画像処理部22により実行される画像認識処理において認識対象とする地物50が、認識対象決定部25により決定される。そのため、地物配置区間Aは、当該画像認識処理において認識対象となり得る地物50(本例では図6に示すような道路標示)を含むように設定される。
【0054】
予測速度推移決定部27は、地図情報取得部23が取得した地物配置区間Aの道路情報RDに基づき、当該地物配置区間A内での予測速度推移を決定する。本実施形態では、速度予測値設定規則と加速度予測値設定規則とからなる予測速度推移設定規則に基づき、予測速度推移決定部27が予測速度推移を決定する。ここで、速度予測値設定規則は、道路上における各道路部分(区間又は地点)における速度予測値を規定する規則であり、加速度予測値設定規則は、速度予測値の異なる道路部分同士の接続部における加速度予測値を設定する規則である。
【0055】
図4は、速度予測値設定規則の一例を示す図であり、この例では、速度予測値が、「直線区間」、「カーブ区間」、「非優先交差点」、及び「優先交差点」の4つの道路部分(道路形態)について規定されている。ここで、直線区間は、道路の曲率半径が所定の基準値以上(無限大を含む)の区間であり、カーブ区間は、道路の曲率が当該基準値より小さな区間である。この基準値は、制限速度に基づき設定される値とすることができ、例えば、車両3が制限速度で走行(旋回を含む)した場合に車両3に作用する横加速度が所定値(例えば0.2〔G〕等、Gは重力加速度)となる曲率半径を上記基準値とすることができる。また、優先交差点は、交差点への進入前に自車両3が走行する走行道路60(図2、図3参照)が、当該交差点において走行道路60に交差する他の道路61(図2、図3参照)に対する優先道路である交差点であり、非優先交差点は、他の道路61が走行道路60に対する優先道路である交差点である。
【0056】
直線区間に対応する速度予測値である第一予測速度Vaは、制限速度に基づく値とすることができ、例えば、制限速度と同じ値としたり、制限速度に所定値を乗算した値又は加算した値とすることができる。なお、この場合の所定値(乗算値又は加算値)は、学習値とすることが可能である。制限速度に関する情報は、地図情報記憶部10に記憶された道路情報RDに基づき取得される構成とすることも、道路側に設置された通信装置との間の路車間通信により得た情報に基づき取得される構成とすることもできる。カーブ区間に対応する速度予測値である第二予測速度Vbは、道路の曲率半径に基づく推奨車速とすることができる。この推奨車速は、例えば、車両3に作用する横加速度が所定値(例えば0.2〔G〕等)となる速度とすることができ、この場合、曲率半径が小さくなるに従って第二予測速度Vbは低い値に設定される。
【0057】
非優先交差点に対応する速度予測値である第三予測速度Vcは、基本的に、優先交差点に対応する速度予測値である第四予測速度Vdよりも小さな値に設定される。具体的には、第三予測速度Vcは、設定対象の非優先交差点が一時停止義務のある交差点(例えば、図2に示す第一停止線標示52の設けられた交差点70)である場合には、零に設定される。また、第四予測速度Vdは、例えば、設定対象の優先交差点が設けられた道路区間(直線区間或いはカーブ区間)の速度予測値と同じ値に設定したり、当該速度予測値から所定値を減算した値又は1以下の所定値を乗算した値に設定することができる。この場合の所定値(減算値又は乗算値)は、学習値とすることが可能である。本実施形態では、第三予測速度Vc及び第四予測速度Vdが、本発明における「種別依存速度」に相当する。
【0058】
なお、速度予測値設定規則に規定される速度予測値を、固定値ではなく学習値とすることも可能である。また、速度予測値設定規則に規定される速度予測値が、個人別や道路部分別(区間別又は地点別)に個別に設定される構成とすることもできる。このような場合には、ある非優先交差点についての第三予測速度Vcを、ある優先交差点についての第四予測速度Vdと同じ値に設定したり、当該第四予測速度Vdよりも大きな値に設定することもできる。
【0059】
図5は、加速度予測値設定規則の一例を示す図であり、この例では、加速度予測値が、「減速」及び「加速」の2つの走行条件について規定されている。減速に対応する加速度予測値である第一予測加速度αa(<0)や、加速に対応する加速度予測値である第二予測加速度αb(>0)は、運転者の一般的傾向に基づき設定される値とすることができ、例えば、絶対値が0.1〔G〕や0.2〔G〕等となる加速度とすることができる。この加速度予測値についても、上記速度予測値と同様に、固定値ではなく学習値としたり、個人別や道路部分別(区間別又は地点別)に個別に設定される構成とすることも可能である。
【0060】
上記のような構成を備えるため、地物配置区間Aに交差点70が含まれる場合には、当該交差点70を通過する際の自車両3の速度が当該交差点70の種別に応じた種別依存速度(図4の例では第三予測速度Vc又は第四予測速度Vd)となるように予測速度推移が決定される。また、地物配置区間Aに含まれる交差点70への進入前に自車両3が走行する走行道路60が、当該交差点70において走行道路60に交差する他の道路61に対する優先道路である場合の種別依存速度である第四予測速度Vdは、他の道路61が走行道路60に対する優先道路である場合の種別依存速度である第三予測速度Vcよりも高い値に決定される。
【0061】
予測速度推移決定部27が決定する予測速度推移の具体例について、図2及び図3を参照して説明する。図2(b)は、自車両3の進行方向前方D1側に交差点70があり、当該交差点70が非優先交差点である状況を表す図であり、図2(a)は、図2(b)に対応する道路ネットワーク情報を表している。図2(a)及び図2(b)の双方は、推定自車位置EPに基づき車両3側で認識されている道路情報RDを示している。そのため、図示は省略するが、車両3に対する各地物50の実際の位置(延在方向Lの位置)は、図2(b)に示す位置から、推定自車位置EPに含まれる誤差に応じて延在方向Lに沿ってずらした位置となる。
【0062】
図2(b)に示す例では、車両3の進行方向前方D1側にある、進行方向標示51、第一停止線標示52、第一交差点形状標示54、及び第二停止線標示53を全て含むように、地物配置区間Aが設定されている。これら4つの地物50(進行方向標示51、第一停止線標示52、第一交差点形状標示54、及び第二停止線標示53)は、道路の延在方向Lに分かれて配置されるとともに、隣り合う地物50の当該延在方向Lに沿った間隔Sが所定距離T以下となっている。すなわち、本実施形態では、地物配置区間Aは、道路の延在方向Lに分かれて配置されるとともに、隣り合う地物50の当該延在方向Lに沿った間隔Sが所定距離T以下である一群の地物については、当該一群の地物を構成する全ての地物50を含むように、延在方向Lに延びる連続区間として設定される。
【0063】
ここで、所定距離Tは、例えば、推定自車位置EPに含まれ得る誤差の最大値に基づき設定することができ、例えば、10〔m〕以上であって100〔m〕以下の範囲内の値とすることができる。なお、この所定距離Tは、車速に応じて可変に設定することも可能である。また、推定自車位置EPに含まれ得る誤差の最大値は、推定自車位置補正部24による前回の補正からの走行距離に応じて変化し得るため、この変化を考慮して前回の補正からの走行距離に応じて所定距離Tを可変に設定することも可能である。また、地物50間の間隔Sは、図2に示す例では、地物50の延在方向Lにおける中央部同士の間隔としているが、地物50の延在方向Lにおける互いに近い側の端部同士の間隔(すなわち、地物50に占有されない部分の道路長さ)とすることもできる。
【0064】
ここで、地物配置区間Aに含まれる地物50の中で最も進行方向後方D2側に位置する地物50(図2に示す例では進行方向標示51)を「第一対象地物」とし、地物配置区間Aに含まれる地物50の中で最も進行方向前方D1側に位置する地物50(図2に示す例では第二停止線標示53)を「第二対象地物」とする。図2に示す例では、地物配置区間Aの進行方向後方D2側の端部は、第一対象地物の進行方向後方D2側の端部に対して進行方向後方D2側に第一所定距離だけ離間した位置に設定され、地物配置区間Aの進行方向前方D1側の端部は、第二対象地物の進行方向前方D1側の端部に対して進行方向前方D1側に第二所定距離だけ離間した位置に設定されている。このように第一所定距離や第二所定距離を設定するのは、上述したように、本実施形態では、地物配置区間Aが、画像認識処理を実行する範囲である画像認識区間に一致するためであり、第一所定距離や第二所定距離は、推定自車位置EPに含まれ得る誤差の最大値に基づく値(例えば、当該最大値と同じ値、当該最大値の2倍の値等)に設定することが可能である。
【0065】
図2(c)は、図2(b)で示す例において、図4に示す速度予測値設定規則、及び図5に示す加速度予測値設定規則に基づき決定される予測速度推移を示している。この例では、第一停止線標示52の設置地点である第二地点P2において、車速が非優先交差点に対応する第三予測速度Vc(本例では零)となるとともに、当該第二地点P2に対して進行方向後方D2側から近づく際の減速に係る加速度が「αa」となり、当該第二地点P2から進行方向前方D1側に離れる際の加速に係る加速度が「αb」となるように、予測速度推移が決定されている。このように予測速度推移が決定されるため、本実施形態では、予測速度推移における加減速の開始地点や終了地点は、交差点70の位置、加速度予測値(図5参照)、速度予測値(図4参照)に基づき定まる。
【0066】
図3は、図2とは異なる走行状況を示した図であり、図3(a)、図3(b)、図3(c)が、それぞれ、図2(a)、図2(b)、図2(c)に対応する。この図3に示す例では、自車両3の進行方向前方D1側にある交差点70は非優先交差点ではなく優先交差点であり、車両3の進行方向前方D1側にある第二交差点形状標示55と横断歩道標示56とを含むように、地物配置区間Aが設定されている。
【0067】
ところで、図2及び図3に示すように、地物配置区間Aは、基本的に、交差点70を車両3が直進するものとして設定されるため、地物配置区間Aの交差点70を挟んだ両側の各部分の延在方向は、互いに平行となる。なお、経路案内部83が経路案内を行っている場合には、案内経路に沿うように地物配置区間Aが設定される構成とすることができる。このような構成では、案内経路によっては、地物配置区間Aが交差点70において屈曲するように設定され、この場合、地物配置区間Aの交差点70を挟んだ両側の各部分の延在方向は互いに交差する方向となる。
【0068】
2−6.認識率決定部の構成
認識率決定部26は、地物情報FTと予測速度推移とに基づいて、地物配置区間Aに含まれる地物50の認識率Rを決定する機能部である。ここで、認識率Rは、地物50の画像認識に成功する割合を表す指標(成功率の推定値)である。このような認識率Rの決定機能を実現すべく、認識率決定部26は、基準認識率取得部31と補正係数決定部32とを備え、認識率決定部26は、基準認識率取得部31が取得した基準認識率RSを、補正係数決定部32が決定した補正係数Cにより補正した値を認識率Rに決定するように構成されている。本実施形態では、認識率決定部26は、基準認識率RSに補正係数Cを乗算する演算により、認識率Rを導出して決定する。なお、本実施形態では、認識率決定部26は、地物配置区間Aに含まれる地物50であって画像処理部22による画像認識処理において認識対象となり得る地物50(本例では図6に示すような道路標示)の全てについて、認識率Rを決定する。
【0069】
2−6−1.基準認識率取得部の構成
基準認識率取得部31は、認識率Rの決定対象の地物50についての基準認識率RSを取得する機能部である。本実施形態では、基準認識率RSは、地物50の種別と関連付けられて基準認識率記憶部11に記憶されており、基準認識率取得部31は、基準認識率記憶部11を参照して必要な基準認識率RSを取得する。
【0070】
ここで、基準認識率RSは、地物50の種別に応じて予め定められた、画像認識の平均的な成功率(成功確率)を表し、0以上であって1以下の値に設定される。図6に示す例では、進行方向標示51、第一停止線標示52、第二停止線標示53、第一交差点形状標示54、第二交差点形状標示55、及び横断歩道標示56のそれぞれの基準認識率RSが、「RS1」、「RS2」、「RS3」、「RS4」、「RS5」、及び「RS6」に設定されている。例えば、RS1を「0.6」、RS2を「0.8」、RS3を「0.7」、RS4を「0.7」、RS5を「0.8」、RS6を「0.7」に設定することができる。
【0071】
2−6−2.補正係数決定部の構成
補正係数決定部32は、予測速度推移決定部27が決定した予測速度推移に基づいて補正係数Cを決定する機能部である。この補正係数Cは、基準認識率RSを補正するための補正係数であり、具体的には、画像処理部22による地物50の画像認識処理を行う際の自車両3の速度に起因する補正を行うための補正係数である。本実施形態では、補正係数Cが、本発明における「速度要因補正係数」に相当する。
【0072】
上述したように、本実施形態では、地物50の認識率Rには、当該地物50の撮影時における車速が低くなるに従って低下するとともに、当該地物50の撮影時における自車両3の加速度が高くなるに従って低下するという傾向が生じる。この傾向に鑑み、本実施形態では、補正係数決定部32は、予測速度推移が示す自車両3の速度が低くなるに従って認識率Rを低くするように補正係数Cを決定するとともに、予測速度推移が示す自車両3の加速度が高くなるに従って認識率Rを低くするように補正係数Cを決定する。そして、本実施形態では上記のように、認識率Rは、基準認識率RSに補正係数Cを乗算した値とされる。そのため、補正係数Cは、予測速度推移が示す自車両3の速度が低くなるに従って小さくなる値に決定されるとともに、予測速度推移が示す自車両3の加速度が高くなるに従って小さくなる値に決定される。
【0073】
補正係数決定部32は、補正係数設定規則に基づき補正係数Cを決定する。この際、自車両3の車速や加速度に対する上記のような傾向を考慮して補正係数Cを決定すべく、本実施形態では、補正係数設定規則は、速度減点値設定規則と加速度減点値設定規則とから構成されている。ここで、速度減点値設定規則は、図7に一例を示すように、速度Vに対応付けて速度減点値ΔXを規定しており、速度Vが低くなるに従って大きな速度減点値ΔXが規定されている。図7に示す例では、速度Vが3つの速度域に区分されており、第二基準速度V2より大きな速度Vに対しては速度減点値ΔXとして「0」が規定され、第二基準速度V2以下であるとともに第一基準速度V1(<V2)より大きな速度Vに対しては速度減点値ΔXとして正の値の「ΔX1」が規定され、第一基準速度V1以下の速度Vに対しては速度減点値ΔXとしてΔX1より大きな「ΔX2」が規定されている。例えば、V1を10〔km/h〕、V2を20〔km/h〕、ΔX1を「0.1」、ΔX2を「0.2」とすることができる。
【0074】
また、加速度減点値設定規則は、図8に一例を示すように、加速度αに対応づけて加速度減点値ΔYを規定しており、加速度αが加速側或いは減速側に高くなる(すなわち、絶対値が大きくなる)に従って大きな加速度減点値ΔYが規定されている。図8に示す例では、加速度αが3つの加速度域に区分されており、第一基準加速度α1(<0)より大きく第二基準加速度α2(>0)より小さな加速度αに対しては加速度減点値ΔYとして「0」が規定され、第一基準加速度α1以下の加速度αについては加速度減点値ΔYとして正の値の「ΔY1」が規定され、第二基準加速度α2以上の加速度αについては加速度減点値ΔYとして正の値の「ΔY2」が規定されている。例えば、α1及びα2の双方を0.1〔G〕、ΔY1及びΔY2の双方を「0.1」とすることができる。
【0075】
そして、補正係数決定部32は、認識率Rの決定対象の地物50の配置位置における予測速度推移が示す自車両3の速度及び加速度に対応する速度減点値ΔX及び加速度減点値ΔYを図7及び図8に基づき決定し、補正係数Cを、「1」からΔX及びΔYの双方を減算した値(1−ΔX−ΔY)に決定する。
【0076】
図2に示す例について具体的に説明すると、進行方向標示51の配置位置である第一地点P1において、予測速度推移が示す速度は「Va」であるとともに、予測速度推移が示す加速度は「0」である。そして、図2に示す例ではVa>V2であるため、速度減点値ΔX及び加速度減点値ΔYの双方は「0」となり、補正係数Cは「1」に決定される。よって、進行方向標示51の認識率Rは、その基準認識率RSである「RS1」と同一の値に決定される。一方、第一停止線標示52については、当該第一停止線標示52の配置位置である第二地点P2において、予測速度推移が示す速度は「Vc」であるとともに、予測速度推移が示すか加速度は「αa」である。そして、図2に示す例ではVc<V1であるとともにαa≦α1であるため、速度減点値ΔXは「ΔX2」となり、加速度減点値ΔYは「ΔY1」となる。よって、第一停止線標示52の認識率Rは、その基準認識率RSである「RS2」よりも小さな値に決定される。
【0077】
具体的な数値例を用いて更に説明すると、RS1=0.6、RS2=0.8、ΔX2=0.2、ΔY1=0.1である場合には、進行方向標示51については、基準認識率RS及び認識率Rの双方が「0.6」となる。一方、第一停止線標示52については、基準認識率RSが「0.8」であるのに対し、補正係数Cが「0.7」となるため認識率Rは「0.56」となる。よって、基準認識率RS同士を比較した場合には第一停止線標示52の方が値が大きくなるのに対し、予測速度推移が考慮された認識率R同士を比較した場合には進行方向標示51の方が値が大きくなる。
【0078】
ところで、本実施形態では、画像認識処理における認識対象部分の全体に亘って道路の延在方向Lの位置に関わらず同じ形状である地物50(以下、「特定地物」という。)については、認識率決定部26は、補正係数Cによる補正量を低減して認識率Rを決定する例外処理を実行するように構成されている。具体的には、図6に示す横断歩道標示56は、符号「50a」で示すハッチング部分が画像認識処理における認識対象部分とされ、当該認識対象部分50aを除く部分(道路の延在方向Lに直交する道路幅方向に延びる部分)は、画像認識の成否の判定には考慮されない。すなわち、この横断歩道標示56は上記の特定地物とされ、認識率Rの決定に際して、補正係数Cによる補正量を低減する例外処理が実行される。例えば、図3に示す横断歩道標示56については、例外処理を実行しない場合の補正係数Cは、(1−ΔY2)となるが、例外処理が実行されることで、補正係数Cの値が、(1−ΔY2)より大きく1以下の値(例えば「1」)に決定される。
【0079】
このような例外処理を実行する理由について以下に説明する。上記のように、本実施形態では、認識対象の地物50が撮影された複数のフレームを、撮影時の車速に応じて合成して画像認識を行うため、車速に誤差が含まれると、合成して得られる地物50の形状が、実際の地物の形状を、道路の延在方向Lに沿って長く或いは短くした形状となる。この点に関し、上記の特定地物の場合には、同一地物内で延在方向Lに沿って異なる位置にある部分の位置関係についてのパターンマッチング処理における一致度の判定要件を他の地物50に比べて緩和しても、画像認識を適切に行うことができる。このような理由で、本実施形態では、上記の特定地物については例外処理を実行する構成を採用している。
【0080】
なお、図6に示す例では、第一停止線標示52及び第二停止線標示53も、上記の特定地物となり得るため、横断歩道標示56と同様に、上記例外処理が実行される構成とすることができる。なお、上記の特定地物について上記例外処理が実行されない構成とすることも可能である。
【0081】
2−7.認識対象決定部の構成
認識対象決定部25は、画像処理部22による画像認識処理において認識対象とする地物50(以下、「認識対象地物」という。)を認識率Rに基づき決定する機能部である。本実施形態では、地物配置区間A内に、認識率決定部26により認識率Rが決定された地物50が複数存在する場合には、認識率Rが最も高い地物50を、認識対象地物に決定する。また、本実施形態では、地物配置区間A内に、認識率決定部26により認識率Rが決定された地物50が1つだけ存在する場合には、当該地物50を認識対象地物に決定する。
【0082】
なお、認識対象地物として選択するための認識率Rの条件として下限値を設定し、認識率Rが当該下限値以上の地物50が地物配置区間A内に存在しない場合には、何れの地物50も認識対象地物として選択しない構成とすることも可能である。また、地物配置区間A内において1つの地物50が画像認識された場合に、当該地物配置区間Aに含まれる他の地物50についての画像認識を更に行う構成とすることも可能である。
【0083】
3.動作処理の手順
次に、図9及び図10を参照して、本実施形態に係る自車位置認識ユニット2において実行される自車位置認識処理の手順、すなわち、自車位置認識方法について説明する。以下に説明する自車位置認識処理の手順は、上記のナビゲーション装置1(自車位置認識ユニット2)の各機能部を構成するハードウェア又はソフトウェア(プログラム)或いはその両方により実行される。上記の各機能部がプログラムにより構成される場合には、ナビゲーション装置1が有する演算処理装置が、上記の各機能部を構成するプログラムを実行するコンピュータとして動作する。なお、図10は、図9のステップ#04の推定自車位置補正処理の手順を示すフローチャートである。
【0084】
3−1.自車位置認識処理の全体手順
図9に示すように、推定自車位置取得部21が推定自車位置EPを取得すると(ステップ#01)、地図情報取得部23が、車両3の前方に設定される所定の探索範囲内に配置された地物50の情報(地物情報FT)を取得し、当該探索範囲内において、画像処理部22による画像認識処理において認識対象となり得る地物50の探索を行う(ステップ#02)。そして、探索範囲内に認識対象となり得る地物50があった場合には(ステップ#03:Yes)、図10に基づき後に説明する推定自車位置補正処理を実行する(ステップ#04)。一方、探索範囲内に認識対象となり得る地物50がなかった場合には(ステップ#03:No)、処理は終了する。なお、この自車位置認識処理は、所定のタイミングで繰り返し実行される。
【0085】
3−2.推定自車位置補正処理の手順
次に、図10を参照して、図9のステップ#04における推定自車位置補正処理について説明する。図9のステップ#02で取得された地物情報FTに基づき地物配置区間Aが設定された後(ステップ#11)、車両3の前方にある当該地物配置区間Aの道路情報RDが地図情報取得部23により取得される(ステップ#12)。そして、この道路情報RDに基づき、予測速度推移決定部27が当該地物配置区間A内での予測速度推移を決定する(ステップ#13)。次に、認識率決定部26が、ステップ#13にて決定された予測速度推移と、図9のステップ#02で取得された地物情報FTとに基づき、認識率Rを決定し(ステップ#14)、当該決定された認識率Rに基づき、認識対象決定部25が、画像処理部22による画像認識処理において認識対象とする地物50である認識対象地物を決定する(ステップ#15)。そして、この決定された認識対象地物についての画像認識処理が、ステップ#16以降の処理で実行される。
【0086】
具体的には、推定自車位置取得部21が取得した推定自車位置EP(ステップ#16)が、画像認識処理を行う範囲である画像認識区間(本例では、地物配置区間Aと同一)に進入すると(ステップ#17:Yes)、画像処理部22が、撮影画像PGを取得するとともに(ステップ#18)、ステップ#15にて決定された認識対象地物の画像認識処理を実行する(ステップ#19)。そして、認識対象地物が画像認識された場合(画像認識に成功した場合)には(ステップ#20:Yes)、当該認識対象地物の地物情報FTに基づき、推定自車位置EPの補正処理が実行される(ステップ#21)。一方、認識対象地物が画像認識されなかった場合(画像認識に失敗した場合)には(ステップ#20:No)、推定自車位置取得部21が取得する推定自車位置EP(ステップ#22)が地物配置区間A内に位置することを条件に(ステップ#23:Yes)、ステップ#18からの処理が繰り返し実行される。
【0087】
4.その他の実施形態
最後に、本発明に係る自車位置認識システムの、その他の実施形態について説明する。なお、以下のそれぞれの実施形態で開示される構成は、矛盾が生じない限り、他の実施形態で開示される構成と組み合わせて適用することが可能である。
【0088】
(1)上記の実施形態で参照した図4に示す例では、速度予測値設定規則が、4つに区分された道路部分のそれぞれについての速度予測値を規定する構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、速度予測値設定規則が、2つ、3つ、或いは5つ以上に区分された道路部分のそれぞれについての速度予測値を規定する構成とすることもできる。例えば、速度予測値設定規則が、「非交差点区間(巡航区間)」、「非優先交差点」、及び「優先交差点」の3つの道路部分についての速度予測値を規定する構成とすることも可能である。この場合、「非交差点区間」は、図4の「直線区間」と「カーブ区間」とを統合したものに相当し、「非交差点区間」に対応する速度予測値は、上述した「直線区間」や「カーブ区間」に対応する速度予測値と同様に設定することが可能である。また、例えば、直線区間やカーブ区間について規定される速度予測値が更に細分化され、車線数や道路の勾配、或いは横断歩道の有無等にも基づいて、速度予測値が規定された構成とすることもできる。さらに、交差点70以外の特定の地点(例えば、踏切や料金所等)についての速度予測値が規定された構成とすることもできる。
【0089】
(2)上記の実施形態で参照した図5に示す例では、加速度予測値設定規則により、2つの走行条件(「減速」及び「加速」)についての加速度予測値が規定された構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、「減速」及び「加速」の少なくとも一方を細分化し、加速度予測値設定規則が、3つ以上の走行条件についての加速度予測値を規定する構成とすることも可能である。例えば、加速度予測値設定規則が、減速について「第一減速」及び「第二減速」の2つに対応する加速度予測値を規定する場合には、交差点種別や横断歩道の有無等に基づき、「第一減速」及び「第二減速」のいずれかが選択される構成とすることができる。加速についても同様である。
【0090】
(3)上記の実施形態で参照した図7に示す例では、速度Vが3つの速度域に区分された構成を例として説明したが、速度Vが2つ或いは4つ以上の速度域に区分された構成とすることも可能である。同様に、上記の実施形態で参照した図8に示す例では、加速度αが3つの加速度域に区分された構成を例として説明したが、加速度αが2つ或いは4つ以上の加速度域に区分された構成とすることも可能である。
【0091】
(4)上記の実施形態では、補正係数決定部32が、図7に示すような速度減点値設定規則と、図8に示すような加速度減点値設定規則とに基づき、補正係数Cを決定する構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、補正係数決定部32が、以下の式(1)に基づき補正係数Cを導出して、補正係数Cを決定する構成とすることもできる。
C=1−Z1/V−Z2×α・・・(1)
ここで、「V」は自車両3の速度を表し、「α」は自車両3の加速度を表す。また、「Z1」及び「Z2」は、速度及び加速度についての重み付け係数であり、例えば、ナビゲーション装置1の性能に基づいて設定される構成とすることができる。また、「Z1」及び「Z2」を、学習値とすることも可能である。
また、自車両3の速度及び加速度と補正係数Cとの関係を規定した補正係数マップが記憶装置に記憶されており、当該記憶装置を参照して補正係数決定部32が補正係数Cを決定する構成とすることも可能である。
【0092】
(5)上記の実施形態では、補正係数決定部32が、予測速度推移が示す自車両3の速度及び加速度の双方に基づき補正係数Cを決定する構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、補正係数決定部32が、予測速度推移が示す自車両3の速度及び加速度のいずれか一方のみ(例えば速度のみ)に基づき補正係数Cを決定する構成とすることもできる。
【0093】
(6)上記の実施形態では、予測速度推移における加減速の開始地点や終了地点が、交差点70の位置、加速度予測値(図5参照)、及び速度予測値(図4参照)に基づき定まる構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、加減速の開始地点或いは終了地点に関する設定規則が備えられ、予測速度推移における加速度が、予め定められた規則ではなく、交差点70の位置、加減速の開始地点或いは終了地点、及び速度予測値(図4参照)に基づき定まる構成とすることも可能である。
【0094】
(7)上記の実施形態では、予測速度推移決定部27が、道路情報RDに基づいて地物配置区間A内での予測速度推移を決定する構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、少なくとも道路情報RDに基づくのであれば、予測速度推移決定部27が更に別の単数又は複数の情報にも基づいて予測速度推移を決定する構成とすることも可能である。例えば、予測速度推移決定部27が、道路情報RDと自車両3の現在の走行状態(例えば車速等)との双方に基づいて、或いは、道路情報RDと地物配置区間Aにおける渋滞情報との双方に基づいて、予測速度推移を決定する構成とすることができる。
【0095】
(8)上記の実施形態では、基準認識率RSが、地物50の種別に応じて予め定められた構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、基準認識率RSが、地物50の種別に加えて単数又は複数の他の情報にも基づき定められた構成とすることも可能である。このような他の情報は、例えば、地物50のかすれの状態の情報、地物50に対する日照の状態(例えば日向と日陰のいずれに含まれるか等)の情報、或いは気象条件や時刻等の情報とすることができる。
【0096】
(9)上記の実施形態では、予測速度推移決定部27が、地物配置区間Aに交差点70が含まれる場合には、当該交差点70を通過する際の自車両3の速度が当該交差点70の種別に応じた種別依存速度となるように予測速度推移を決定する構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、予測速度推移の決定に際し、交差点70の有無を考慮しない構成とすることも可能である。
【0097】
(10)上記の実施形態では、認識率決定部26が、基準認識率RSに補正係数Cを乗算する演算により、認識率Rを導出して決定する構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、基準認識率RS及び補正係数Cと認識率Rとの関係を規定した認識率マップが記憶装置に記憶されており、当該記憶装置を参照して認識率決定部26が認識率Rを決定する構成とすることもできる。また、上記の実施形態では、認識率Rが、基準認識率RSに補正係数Cを乗算した値とされる構成を例として説明したが、認識率Rが、基準認識率RSに補正係数Cを除算した値とされる構成や、認識率Rが、基準認識率RSに補正係数Cを加算或いは減算した値とされる構成とすることも可能である。
【0098】
(11)上記の実施形態では、地物配置区間Aが、道路の延在方向Lに分かれて配置されるとともに、隣り合う地物50の当該延在方向Lに沿った間隔Sが所定距離T以下である一群の地物については、当該一群の地物を構成する全ての地物50を含むように設定される構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、画像認識処理を行う範囲である認識要求範囲が、道路の延在方向Lに沿うように地物50毎に設定される構成では、隣り合う地物50の認識要求範囲同士が互いに重複する一群の地物について、当該一群の地物を構成する全ての地物50を含むように地物配置区間Aが設定される構成とすることができる。
【0099】
(12)上記の実施形態では、画像認識処理を行う範囲を定める画像認識区間が、地物配置区間Aと一致する構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、画像認識区間が、地物配置区間Aとは独立に設定される構成とすることも可能である。この場合、地物配置区間Aを、地物50が占める道路区間に合わせて設定する(すなわち、上述した第一所定距離や第二所定距離を零に設定する)ことも可能である。また、この場合、画像認識区間は、例えば、上記認識要求範囲に基づき設定される構成とすることができる。
【0100】
(13)上記の実施形態では、推定自車位置EPの補正のための画像認識において対象となる地物50が、路面に設けられた道路標示である構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、信号機のような立体的な地物50を、推定自車位置EPの補正のために利用することも可能である。この場合、車両3へのカメラ90の設置形態は、当該立体的な地物50の画像認識が可能となるように設定される。
【0101】
(14)上記の実施形態では、カメラ90が車両3の後方を撮影するバックカメラである構成を例として説明した。しかし、本発明の実施形態はこれに限定されるものではなく、カメラ90が車両3の前方を撮影するフロントカメラや、車両3の側方を撮影するサイドカメラとされた構成とすることも可能である。
【0102】
(15)上記の実施形態では、本発明に係る自車位置認識システムを車載用のナビゲーション装置1に適用した場合を例として説明したが、このようなナビゲーション装置1は、車両3に固定的に搭載されたものに限らず、任意に移動可能なポータブルナビゲーション装置であって、使用時にのみ車両3に持ち込まれるようなものであっても良い。
【0103】
(16)上記の実施形態では、本発明に係る自車位置認識システムをナビゲーション装置1に適用した場合を例として説明したが、本発明に係る自車位置認識システムを、車両に備えられるその他の装置(走行制御装置等)に適用することも可能である。
【0104】
(17)上記の実施形態において説明した機能部の割り当ては単なる一例であり、複数の機能部を組み合わせたり、1つの機能部をさらに区分けしたりすることも可能である。ま
た、上記の実施形態では、自車位置認識ユニット2を構成する各機能部、及び各記憶部10,11が車両3に備えられる構成を例として説明したが、自車位置認識ユニット2の少なくとも一部の機能部や、記憶部10,11の少なくとも一部が、車両3の外部(例えばサーバ装置等)に設けられ、インターネット等の通信ネットワークを介して情報や信号の送受信が行われる構成とすることもできる。
【0105】
(18)その他の構成に関しても、本明細書において開示された実施形態は全ての点で例示であって、本発明の実施形態はこれに限定されない。すなわち、本願の特許請求の範囲に記載されていない構成に関しては、本発明の目的を逸脱しない範囲内で適宜改変することが可能である。
【産業上の利用可能性】
【0106】
本発明は、自車両に備えられたカメラによる撮影画像を用いて自車位置を認識する自車位置認識システム、自車位置認識プログラム、及び自車位置認識方法に好適に利用することができる。
【符号の説明】
【0107】
3:車両(自車両)
21:推定自車位置取得部
22:画像処理部
23a:地物情報取得部
23b:道路情報取得部
24:推定自車位置補正部
25:認識対象決定部
26:認識率決定部
27:予測速度推移決定部
31:基準認識率取得部
32:補正係数決定部
50:地物
50a:認識対象部分
60:走行道路
61:他の道路
70:交差点
90:カメラ
A:地物配置区間
C:補正係数(速度要因補正係数)
EP:推定自車位置
FT:地物情報
L:延在方向
PG:撮影画像
R:認識率
RD:道路情報
RS:基準認識率
S:間隔
T:所定距離
Vc:第三予測速度(種別依存速度)
Vd:第四予測速度(種別依存速度)
【特許請求の範囲】
【請求項1】
自車両の推定位置である推定自車位置を取得する推定自車位置取得部と、前記自車両に備えられたカメラにより撮影された撮影画像を取得し、当該撮影画像に含まれる地物の画像認識処理を行う画像処理部と、地物の位置情報及び種別情報を含む地物情報を取得する地物情報取得部と、前記画像認識処理による地物の認識結果と前記地物情報に含まれる地物の位置情報とに基づき前記推定自車位置を補正する推定自車位置補正部と、を備えた自車位置認識システムであって、
道路情報を取得する道路情報取得部と、
地物が配置された道路区間である地物配置区間に前記推定自車位置が進入する前に、少なくとも前記道路情報に基づいて、前記地物配置区間内での前記自車両の速度推移の予測を示す予測速度推移を決定する予測速度推移決定部と、
前記地物情報と前記予測速度推移とに基づいて、前記地物配置区間に含まれる地物の画像認識に成功する割合である認識率を決定する認識率決定部と、
前記画像認識処理において認識対象とする地物を前記認識率に基づき決定する認識対象決定部と、を備える自車位置認識システム。
【請求項2】
前記道路情報は、交差点の有無及び交差点の種別を特定するための情報を含み、
前記予測速度推移決定部は、前記地物配置区間に交差点が含まれる場合には、当該交差点を通過する際の前記自車両の速度が当該交差点の種別に応じた種別依存速度となるように前記予測速度推移を決定する請求項1に記載の自車位置認識システム。
【請求項3】
前記地物配置区間に含まれる前記交差点への進入前に前記自車両が走行する走行道路が、前記交差点において当該走行道路に交差する他の道路に対する優先道路である場合の前記種別依存速度が、前記他の道路が前記走行道路に対する優先道路である場合の前記種別依存速度よりも高い値に決定される請求項2に記載の自車位置認識システム。
【請求項4】
前記予測速度推移に基づいて、前記画像処理部による地物の画像認識処理を行う際の前記自車両の速度に起因する前記認識率に関する補正係数である速度要因補正係数を決定する補正係数決定部を更に備え、
前記認識率決定部は、地物の種別に応じて予め定められた基準認識率を、前記速度要因補正係数により補正した値を前記認識率に決定する請求項1から3のいずれか一項に記載の自車位置認識システム。
【請求項5】
前記補正係数決定部は、前記予測速度推移が示す前記自車両の加速度が高くなるに従って前記認識率を低くするように前記速度要因補正係数を決定する請求項4に記載の自車位置認識システム。
【請求項6】
前記補正係数決定部は、前記予測速度推移が示す前記自車両の速度が低くなるに従って前記認識率を低くするように前記速度要因補正係数を決定する請求項4又は5に記載の自車位置認識システム。
【請求項7】
前記認識率決定部は、路面上に設けられた地物であって、前記画像認識処理における認識対象部分の全体に亘って道路の延在方向の位置に関わらず同じ形状である地物については、前記速度要因補正係数による補正量を低減して前記認識率を決定する請求項4から6のいずれか一項に記載の自車位置認識システム。
【請求項8】
道路の延在方向に分かれて配置されるとともに、隣り合う地物の当該延在方向に沿った間隔が所定距離以下である一群の地物については、当該一群の地物を構成する全ての地物を含むように前記地物配置区間が設定される請求項1から7のいずれか一項に記載の自車位置認識システム。
【請求項9】
自車両の推定位置である推定自車位置を取得する推定自車位置取得機能と、前記自車両に備えられたカメラにより撮影された撮影画像を取得し、当該撮影画像に含まれる地物の画像認識処理を行う画像処理機能と、地物の位置情報及び種別情報を含む地物情報を取得する地物情報取得機能と、前記画像認識処理による地物の認識結果と前記地物情報に含まれる地物の位置情報とに基づき前記推定自車位置を補正する推定自車位置補正機能と、を実現させるための自車位置認識プログラムであって、
道路情報を取得する道路情報取得機能と、
地物が配置された道路区間である地物配置区間に前記推定自車位置が進入する前に、少なくとも前記道路情報に基づいて、前記地物配置区間内での前記自車両の速度推移の予測を示す予測速度推移を決定する予測速度推移決定機能と、
前記地物情報と前記予測速度推移とに基づいて、前記地物配置区間に含まれる地物の画像認識に成功する割合である認識率を決定する認識率決定機能と、
前記画像認識処理において認識対象とする地物を前記認識率に基づき決定する認識対象決定機能と、をコンピュータに実現させるための自車位置認識プログラム。
【請求項10】
自車両の推定位置である推定自車位置を取得する推定自車位置取得ステップと、前記自車両に備えられたカメラにより撮影された撮影画像を取得し、当該撮影画像に含まれる地物の画像認識処理を行う画像処理ステップと、地物の位置情報及び種別情報を含む地物情報を取得する地物情報取得ステップと、前記画像認識処理による地物の認識結果と前記地物情報に含まれる地物の位置情報とに基づき前記推定自車位置を補正する推定自車位置補正ステップと、を備えた自車位置認識方法であって、
道路情報を取得する道路情報取得ステップと、
地物が配置された道路区間である地物配置区間に前記推定自車位置が進入する前に、少なくとも前記道路情報に基づいて、前記地物配置区間内での前記自車両の速度推移の予測を示す予測速度推移を決定する予測速度推移決定ステップと、
前記地物情報と前記予測速度推移とに基づいて、前記地物配置区間に含まれる地物の画像認識に成功する割合である認識率を決定する認識率決定ステップと、
前記画像認識処理において認識対象とする地物を前記認識率に基づき決定する認識対象決定ステップと、を備える自車位置認識方法。
【請求項1】
自車両の推定位置である推定自車位置を取得する推定自車位置取得部と、前記自車両に備えられたカメラにより撮影された撮影画像を取得し、当該撮影画像に含まれる地物の画像認識処理を行う画像処理部と、地物の位置情報及び種別情報を含む地物情報を取得する地物情報取得部と、前記画像認識処理による地物の認識結果と前記地物情報に含まれる地物の位置情報とに基づき前記推定自車位置を補正する推定自車位置補正部と、を備えた自車位置認識システムであって、
道路情報を取得する道路情報取得部と、
地物が配置された道路区間である地物配置区間に前記推定自車位置が進入する前に、少なくとも前記道路情報に基づいて、前記地物配置区間内での前記自車両の速度推移の予測を示す予測速度推移を決定する予測速度推移決定部と、
前記地物情報と前記予測速度推移とに基づいて、前記地物配置区間に含まれる地物の画像認識に成功する割合である認識率を決定する認識率決定部と、
前記画像認識処理において認識対象とする地物を前記認識率に基づき決定する認識対象決定部と、を備える自車位置認識システム。
【請求項2】
前記道路情報は、交差点の有無及び交差点の種別を特定するための情報を含み、
前記予測速度推移決定部は、前記地物配置区間に交差点が含まれる場合には、当該交差点を通過する際の前記自車両の速度が当該交差点の種別に応じた種別依存速度となるように前記予測速度推移を決定する請求項1に記載の自車位置認識システム。
【請求項3】
前記地物配置区間に含まれる前記交差点への進入前に前記自車両が走行する走行道路が、前記交差点において当該走行道路に交差する他の道路に対する優先道路である場合の前記種別依存速度が、前記他の道路が前記走行道路に対する優先道路である場合の前記種別依存速度よりも高い値に決定される請求項2に記載の自車位置認識システム。
【請求項4】
前記予測速度推移に基づいて、前記画像処理部による地物の画像認識処理を行う際の前記自車両の速度に起因する前記認識率に関する補正係数である速度要因補正係数を決定する補正係数決定部を更に備え、
前記認識率決定部は、地物の種別に応じて予め定められた基準認識率を、前記速度要因補正係数により補正した値を前記認識率に決定する請求項1から3のいずれか一項に記載の自車位置認識システム。
【請求項5】
前記補正係数決定部は、前記予測速度推移が示す前記自車両の加速度が高くなるに従って前記認識率を低くするように前記速度要因補正係数を決定する請求項4に記載の自車位置認識システム。
【請求項6】
前記補正係数決定部は、前記予測速度推移が示す前記自車両の速度が低くなるに従って前記認識率を低くするように前記速度要因補正係数を決定する請求項4又は5に記載の自車位置認識システム。
【請求項7】
前記認識率決定部は、路面上に設けられた地物であって、前記画像認識処理における認識対象部分の全体に亘って道路の延在方向の位置に関わらず同じ形状である地物については、前記速度要因補正係数による補正量を低減して前記認識率を決定する請求項4から6のいずれか一項に記載の自車位置認識システム。
【請求項8】
道路の延在方向に分かれて配置されるとともに、隣り合う地物の当該延在方向に沿った間隔が所定距離以下である一群の地物については、当該一群の地物を構成する全ての地物を含むように前記地物配置区間が設定される請求項1から7のいずれか一項に記載の自車位置認識システム。
【請求項9】
自車両の推定位置である推定自車位置を取得する推定自車位置取得機能と、前記自車両に備えられたカメラにより撮影された撮影画像を取得し、当該撮影画像に含まれる地物の画像認識処理を行う画像処理機能と、地物の位置情報及び種別情報を含む地物情報を取得する地物情報取得機能と、前記画像認識処理による地物の認識結果と前記地物情報に含まれる地物の位置情報とに基づき前記推定自車位置を補正する推定自車位置補正機能と、を実現させるための自車位置認識プログラムであって、
道路情報を取得する道路情報取得機能と、
地物が配置された道路区間である地物配置区間に前記推定自車位置が進入する前に、少なくとも前記道路情報に基づいて、前記地物配置区間内での前記自車両の速度推移の予測を示す予測速度推移を決定する予測速度推移決定機能と、
前記地物情報と前記予測速度推移とに基づいて、前記地物配置区間に含まれる地物の画像認識に成功する割合である認識率を決定する認識率決定機能と、
前記画像認識処理において認識対象とする地物を前記認識率に基づき決定する認識対象決定機能と、をコンピュータに実現させるための自車位置認識プログラム。
【請求項10】
自車両の推定位置である推定自車位置を取得する推定自車位置取得ステップと、前記自車両に備えられたカメラにより撮影された撮影画像を取得し、当該撮影画像に含まれる地物の画像認識処理を行う画像処理ステップと、地物の位置情報及び種別情報を含む地物情報を取得する地物情報取得ステップと、前記画像認識処理による地物の認識結果と前記地物情報に含まれる地物の位置情報とに基づき前記推定自車位置を補正する推定自車位置補正ステップと、を備えた自車位置認識方法であって、
道路情報を取得する道路情報取得ステップと、
地物が配置された道路区間である地物配置区間に前記推定自車位置が進入する前に、少なくとも前記道路情報に基づいて、前記地物配置区間内での前記自車両の速度推移の予測を示す予測速度推移を決定する予測速度推移決定ステップと、
前記地物情報と前記予測速度推移とに基づいて、前記地物配置区間に含まれる地物の画像認識に成功する割合である認識率を決定する認識率決定ステップと、
前記画像認識処理において認識対象とする地物を前記認識率に基づき決定する認識対象決定ステップと、を備える自車位置認識方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−83576(P2013−83576A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2011−224180(P2011−224180)
【出願日】平成23年10月11日(2011.10.11)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願日】平成23年10月11日(2011.10.11)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]