
自車位置選択方法及び装置
【課題】自立航法による自車位置を道路表示に一致させるマップマッチングを行う時、特に誘導経路を優先的にマッチングさせる際に、自立航法位置とは大きく異なる道路を走行しているように表示することのない「自車位置選択方法及び装置」とする。
【解決手段】自立航法により第1自立航法位置を演算し、この第1自立航法位置を近くの道路に投影して第1マッチング位置を求め、その後所定時間経過後に同様にして第2自立航法位置と第2マッチング位置を求める。第2マッチング位置が誘導経路上のとき、第1自立航法位置を基点として第2自立航法位置を先端とする自立航法位置移動ベクトルと、第1マッチング位置を基点として第2マッチング位置を先端とする誘導経路上位置移動ベクトルとを比較して、端間距離や比率、角度、長さや比率等の比較値を求め、これが予め設定したしきい値を超えるときには第2マッチング位置を現在位置として選択しない。
【解決手段】自立航法により第1自立航法位置を演算し、この第1自立航法位置を近くの道路に投影して第1マッチング位置を求め、その後所定時間経過後に同様にして第2自立航法位置と第2マッチング位置を求める。第2マッチング位置が誘導経路上のとき、第1自立航法位置を基点として第2自立航法位置を先端とする自立航法位置移動ベクトルと、第1マッチング位置を基点として第2マッチング位置を先端とする誘導経路上位置移動ベクトルとを比較して、端間距離や比率、角度、長さや比率等の比較値を求め、これが予め設定したしきい値を超えるときには第2マッチング位置を現在位置として選択しない。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は車両用ナビゲーション装置において、車両が誘導経路に沿って走行している時、自立航法やGPS航法によって得られた自車位置を、誘導経路上に誤ってマップマッチングする事がないようにした、自車位置選択方法、及びその方法を実施する装置に関する。
【背景技術】
【0002】
一般のナビゲーション装置においては、地図を描画するための地図データ及び施設等を検索するための施設情報データを記録したDVD、ハードディスク等の地図・情報データ記録媒体と、この地図・情報データ記録媒体のデータを取り込むデータ取込装置と、地図等を表示するモニタと、必要に応じてGPS受信機及び走行距離センサやジャイロ等を用いた自立航法装置を用い、現在位置及び進行方向の方位を検出する現在位置検出装置を有し、現在位置を含む地図データを地図・情報データ記録媒体から取り込み、この地図データに基づいて現在位置の周囲の地図画像をモニタの画面に描画すると共に、現在位置マークをモニタ画面に重ね合わせて表示し、ナビゲーション装置の移動に応じて地図画像をスクロール表示し、或いは地図画像を画面に固定し現在位置マークを移動させ、現在どこを移動しているのかを一目でわかるようにしている。
【0003】
DVD或いはハードディスク等の地図・情報データ記録媒体に記録されている地図データは、各種の縮尺レベルに応じて適当な大きさの経度幅及び緯度幅に区切られており、道路等は経度及び緯度で表現されたノードの座標集合として記憶されている。道路は2以上のノードの連結からなり、地図データは、道路リスト、ノードテーブル及び交差点構成ノードリスト等からなる道路レイヤ、及び地図画面上に道路、建築物、施設、公園及び河川等を表示するための背景レイヤ等の地図データと、市町村名などの行政区画名、道路名、交差点名及び施設の名前等の、文字や地図記号等を表示するための情報データなどから構成される。
【0004】
また、このナビゲーション装置においては、利用者が所望の目的地或いは経由地に向けて道路を間違うことなく容易に走行できるようにするための経路誘導機能を備えている。この経路誘導機能によれば、種々の手段により目的地を設定し、出発地から目的地まで、これらの地点を結ぶ経路の内各種の条件を加味して適切な経路を演算して提示するようになっている。また、利用者が選択した経路を誘導経路として記憶しておき、走行中、地図画像上に誘導経路を他の経路とは色を変えて太く描画して画面表示したり、誘導経路上の進路を変更すべき交差点に一定距離以内に近づいたときに、交差点を拡大表示し、進路を変更すべき方向を示す矢印等を描画して画面表示したり、音声で右左折の誘導を行うことで、利用者を目的地まで案内することができるようにしている。
【0005】
前記のようなナビゲーション装置において現在位置を地図上に表示することは基本的なことであり、その位置が正確であることは極めて重要なことである。車両の現在位置を検出するには、前記のようにGPS受信機を用いて現在位置を検出することができるが、GPSは必ずしも常に受信できるとは限らず、ビルの陰、トンネル内、山の陰等では正確な現在位置データを得ることができない。また、その位置データは近年精度は向上したものの、未だ必ずしも充分ではない。
【0006】
それに対して走行距離センサやジャイロ等を用いた自立航法によると、車輪の回転数や回転角のデータを用いて高速で走行距離を求めることができ、3次元方向検出可能な極小のジャイロを用いることによって相対的な走行方向の検出も容易であり、短距離での移動の検出には適している。しかしながら、この自立航法では前回検出した地点からの位置を累積するものであり、走行方向も前回検出した方位に対する変化を累積して検出するものであるため、次第に誤差が蓄積し、実際の位置からは次第にずれていってしまう。
【0007】
そのため広く用いられているナビゲーション装置では、上記のような自立航法による現在位置の測定を例えば50ms程度の短時間毎に行い、それを10回程度行った例えば500ms毎に、自立航法による現在位置を、周囲の適切と思われる道路上に合わせて表示するマップマッチングを行っている。マップマッチングの手法についても種々の手法が提案されているが、前記のようにして得られた現在位置から所定距離の範囲内の道路について、走行パターンと同じパターンの道路を現在走行している道路とするパターンマッチング手法や、現在位置から例えば100m等の所定の距離の範囲内に存在する道路に対して、最短距離の地点を求め、複数の道路候補があるときには、最も距離の短い道路上の前記地点を現在位置として地図画面上に表示する投影法等が用いられている。
【0008】
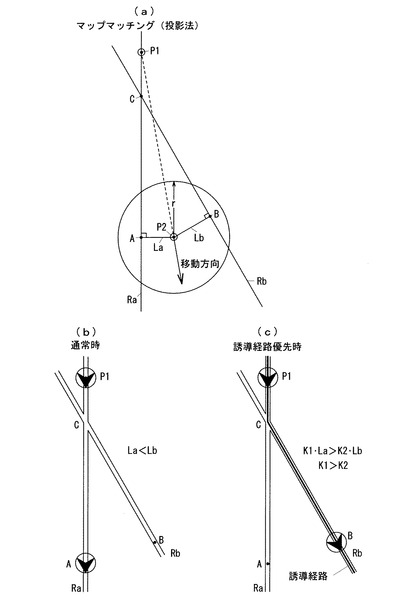
上記マップマッチング手法の内、現在広く用いられている前記投影法によると、図9(a)に示すように行う。即ち、道路Raと道路Rbとが交差点Cで交差している道路地図上で、最初道路Ra上のP1の位置に存在していた車両が、自立航法ではP2の位置に存在することになっている時、このP2の位置から例えば100m等の所定距離rの範囲内に存在する道路を検出し、ここで道路Raと道路Rbが存在することが検出された時、P2の位置からの各道路に対する最短距離の地点を得るために、各道路に直角の線を降ろして各道路上の地点A及びBを求める。このときの各垂直線の長さLaとLbを比較し、より短い方が実際の道路上の位置であるとして、図9(a)の例ではLa<Lbであることにより、同図(b)のように道路Ra上の地点Aを道路上の現在位置とする。
【0009】
投影法のマップマッチングでは上記のような処理を行い、その過程で自立航法で測定した現在位置では、所定距離以内に投影すべき道路が存在しなくなった時、GPSによるデータが適正である場合には、GPSを受信して現在位置を求め、これを自立航法の現在位置に替えて、その位置で前記と同様にマッチングさせる道路を選択し、地図の道路上に現在位置を表示している。
【0010】
更に、車両が誘導経路に沿って走行している時は、運転者は原則として提示した誘導経路に沿って走行しているものとし、所定距離以内に誘導経路が存在する時には原則として誘導経路の方を選択する。またその時、前記図9(c)のように、同図(a)の前記垂直線の長さLaとLbについて、そのまま比較するのではなく、適宜の重み付け係数K1、K2を掛け、その係数は誘導経路側を小さい値として、より自立航法位置に近いものとし、誘導経路が選択されやすくすることにより、「誘導経路優先」の手法を用いることが多い。図9(c)の例においては、同図(a)のように自立航法の現在位置P2が道路Raの方が近いにもかかわらず、前記手法によって予め設定されている誘導経路となっている道路Rbが選択され、その結果道路RbのBの位置にマップマッチングを行う例を示している。
【0011】
上記のようなマップマッチング時に所定距離内に複数の道路候補が存在する時、誘導経路の道路について重み付けを大きくし、優先的に現在位置を当該誘導経路の道路とする技術は、特開平8−68656号公報(特許文献1)に開示している。
【先行技術文献】
【特許文献】
【0012】
【特許文献1】特開平8−68656号公報
【発明の概要】
【発明が解決しようとする課題】
【0013】
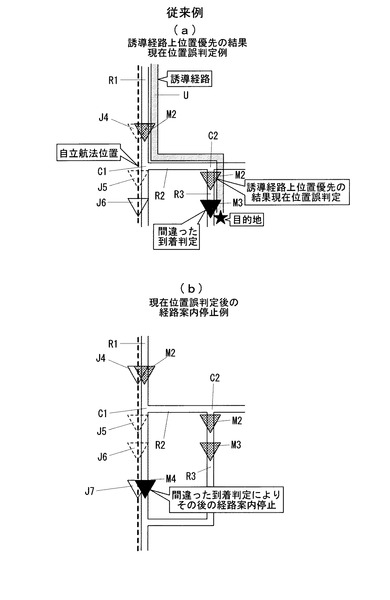
前記特許文献に記載しているようなマップマッチング手法においては、誘導経路に対して重み付けを大きくする結果、時には図8に示すような問題が生じることがある。図8(a)に示す例においては、車両が道路R1上を走行し自立航法によって当該道路上を破線で示すような自立航法位置データが得られる時、誘導経路Uが道路R1から交差点C1で分岐する道路R2を通り、その後直ちに交差点C2で分岐する道路R3を通って、当該道路R3に面している目的地に直ちに至る例を示している。
【0014】
ここで図8(a)における道路R1上の自立航法位置J4のデータによってマップマッチングしたマッチング位置M2から車両が走行し、例えば50ms毎に自立航法位置を更新し、500ms毎にマップマッチングを行う時、車両は本来は誘導経路Uに沿って交差点C1から左折し、道路R2を通らなければならないところ、これに気づかず交差点C1を直進してしまった時には、次のマップマッチングを交差点C1を過ぎた自立航法位置J5で行うと、この自立航法位置J5から例えば100m等の所定距離以内に道路R2から交差点C2で分岐する道路R3が存在し、特にこの道路R3が現在走行している道路R1とほぼ平行に位置していると共に、この道路が特に誘導経路であることによって、マップマッチング位置は誘導経路優先を採用し、マッチング位置M2に現在車両が存在すると認識してしまう。
【0015】
その後更にそのまま道路R1上を走行すると、自立航法位置J6においては、一旦前記のようにマップマッチングしたマッチング位置M2について、そのまま道路R1とほぼ平行な道路R3を走行しているものとして表示し、マッチング位置M3に車両が存在すると認識する。このマッチング位置M3がほぼ目的地であるときには、車両が目的地付近に到着したものとしてその後誘導経路の案内を停止する。
【0016】
そのため、以降は誘導経路優先は行われず、例えば図8(b)に示すように、自立航法による自立航法位置J7では、マップマッチングによって道路R1上のマッチング位置M4に現在存在するものとして正しく表示されるものの、前記のような間違った到着判定により、その後の経路案内は停止されるため、目的地表示も消えると共に先の目的地データもその後の走行には直ちに用いられることがないので、以降はどのようにして先に設定した目的地に走行したらよいかわからなくなる。そのため以降は再度目的地を設定して、新たな誘導経路を表示させる必要が生じる。
【0017】
上記のように、自立航法による自立航法位置を道路表示に一致させるマップマッチングを行う時、特に誘導経路について優先的にマッチングさせる場合は、全く違う道路を走行しているように表示してしまう問題を生じやすい。更に、その間違ったマッチング表示を行っている時、その自車位置表示によって目的地に到着した時、以降は目的地への案内は行われなくなってしまう問題も生じる。
【0018】
したがって本発明は、自立航法による自立航法位置を道路表示に一致させるマップマッチングを行う時、特に誘導経路について優先的にマッチングさせる際に、大きく異なる道路を走行しているように表示してしまう問題を解決し、間違ったマッチング表示を行っている時、その自車位置の認識によって目的地に到着した時、以降は目的地への案内は行われなくなってしまう問題も解決することを目的とする。
【課題を解決するための手段】
【0019】
本発明に係る自車位置選択方法は、前記課題を解決するため、自立航法により第1自立航法位置を演算し、当該第1自立航法位置を誘導経路を優先して近くの道路に投影し第1マッチング位置を求め、所定時間経過後に同様にして第2自立航法位置と第2マッチング位置を求め、前記第2マッチング位置が誘導経路上であるとき、前記第1自立航法位置を基点として前記第2自立航法位置を先端とする自立航法位置移動ベクトルと、前記第1マッチング位置を基点として前記第2マッチング位置を先端とする誘導経路上位置移動ベクトルとを求め、前記自立航法位置移動ベクトルと前記誘導経路上位置移動ベクトルとを比較して比較値を求め、当該比較値が予め設定したしきい値を超えるときには前記第2マッピング位置を現在位置としては選択しないことを特徴とする。
【0020】
本発明に係る他の自車位置選択方法は、前記自車位置選択方法において、前記自立航法位置移動ベクトルと誘導経路上位置移動ベクトルとの比較値は、両移動ベクトルの先端間の長さ自体であることを特徴とする。
【0021】
本発明に係る他の自車位置選択方法は、前記自車位置選択方法において、前記自立航法位置移動ベクトルと誘導経路上位置移動ベクトルとの比較値は、両移動ベクトルの先端間の長さと前記自立航法位置移動ベクトルの長さの比率であることを特徴とする。
【0022】
本発明に係る他の自車位置選択方法は、前記自車位置選択方法において、前記自立航法位置移動ベクトルと誘導経路上位置移動ベクトルとの比較値は、両移動ベクトルのなす角度であることを特徴とする。
【0023】
本発明に係る他の自車位置選択方法は、前記自車位置選択方法において、前記自立航法位置移動ベクトルと誘導経路上位置移動ベクトルとの比較値は、両移動ベクトルの長さの差であることを特徴とする。
【0024】
本発明に係る他の自車位置選択方法は、前記自車位置選択方法において、前記自立航法位置移動ベクトルと誘導経路上位置移動ベクトルとの比較値は、両移動ベクトルの長さの比率であることを特徴とする。
【0025】
本発明に係る自車位置選択方法は、前記課題を解決するため、自立航法により現在位置を演算する自立航法現在位置演算部と、前記自立航法位置演算部で演算した自立航法位置を、近くの道路に投影して道路上の現在位置を演算するマップマッチング演算部と、前記マップマッチング演算部で投影する道路が誘導経路であるとき、前記マップマッチングが適切であるか否かを判別する誘導経路上位置適否判別部とを備え、前記誘導経路上位値適否判別部には、前記自立航法現在位置演算部で演算した第1自立航法位置を基点とし、前記第1自立航法演算後の所定時間経過後に同様にして演算した第2自立航法位置を先端とする自立航法位置移動ベクトルを形成する自立航法位置移動ベクトル形成部と、前記マップマッチング演算部で演算した前記第1自立航法位置のマッチング位置を基点とし、前記第2自立航法位置の誘導経路へのマッチング位置を先端とする誘導経路上位置移動ベクトルを形成する誘導経路位置移動ベクトル形成部と、前記自立航法位置移動ベクトルと前記誘導経路上位置移動ベクトルとを比較した値と、予め設定したしきい値とを比較する両移動ベクトル比較処理部とを備え、前記両移動ベクトル比較処理部の処理で、前記比較値がしきい値を超えたとき、前記第2自立航法位置の誘導経路へのマッチング位置を採用しない現在位置選択部を備えたことを特徴とする。
【発明の効果】
【0026】
本発明は上記のように構成したので、自立航法による自車位置を道路表示に一致させるマップマッチングを行う時、特に誘導経路について優先的にマッチングさせる際に、大きく異なる道路を走行しているように表示してしまう問題を解決することができ、正しい自車位置表示を行うことができる。また、間違ったマッチング表示を行っている時、その自車位置表示によって目的地に到着した時、以降は目的地への案内は行われなくなってしまうことにより、その後の走行が困難になる問題も可決することができる。
【図面の簡単な説明】
【0027】
【図1】本発明の実施例の機能ブロック図である。
【図2】同実施例における自車位置選択処理の作動フロー図である。
【図3】図2の現在位置取得定常処理を行う作動フロー図である。
【図4】図2の自立航法位置と道路上位置の両ベクトルの比較処理を行う作動フロー図である。
【図5】本発明の作動例の説明図である。
【図6】本発明において自立航法位置と道路上位置の両ベクトルの各種比較処理を行う態様を示す説明図である。
【図7】本発明によって従来の問題点を解決した例を示す説明図である。
【図8】従来例の問題点を示す説明図である。
【図9】従来から行われている投影法マップマッチングと、その作動例を示す図である。
【発明を実施するための形態】
【実施例】
【0028】
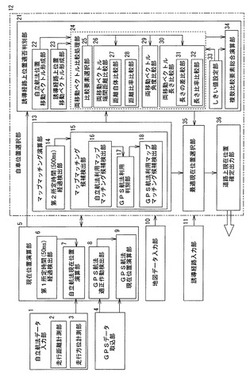
本発明の実施例を図面に沿って説明する。図1は本発明の機能ブロック図であり、本発明を各種の態様で実施できるようにした例を示し、本発明はこれらの機能ブロックの内適宜のものを選択して実施することができる。図1の自車位置選択装置においては、自車の現在位置を演算するに際して、自立航法データとGPSデータとを用い、自立航法データ入力部1では車速パルスを計測する等の走行距離計測部2と、ジャイロによる走行方位計測部3とを備えている。GPSデータ取込部4では、従来と同様のGPS航法によるデータを取り込んでいる。
【0029】
現在の車両位置を演算する現在位置演算部5には、例えば50ms等の第1所定時間が経過したことを検出する第1所定時間経過検出部6を備え、ここで第1所定時間経過したことを検出した時には、自立航法現在位置演算部7は、自立航法データ入力部で入力した走行距離計測部2のデータと、走行方位計測部3のデータによって、先に計測した位置に累積させながら現在位置を演算する。
【0030】
また、現在位置演算部5のGPS航法適正作動検出部8では、GPSデータ取込部4で取り込んだデータによって、受信できる衛星の数等により、現在のGPSデータは現在位置を計測するのに充分であるか否かを検出する。また、GPS航法現在位置演算部9ではGPS航法適正作動検出部8で現在適正に作動していることを出力している時には、GPSデータ取込部4で取り込んだデータによって現在位置を演算する。
【0031】
本発明の主要部となる自車位置選択部12にはマップマッチング演算部13を備え、ここでは例えば500ms等の第2所定時間経過したか否かを検出する第2所定時間経過検出部14を備えており、マップマッチング候補検出部15では、現在位演算部5で演算した現在位置を中心に、例えば100m等の所定距離内に存在する地図の道路の上における位置候補を検出するための、マップマッチング候補検出部16を備える。その中の自立航法利用マップマッチング候補検出部16では、自立航法現在位置演算部7で得られた自立航法による現在位置について、その現在位置から例えば100m以内等の所定距離内の全ての道路について、現在位置となりうる候補を検出する。その際には地図データ入力部10から、DVD、HDD等のデータ記録媒体から自車両位置近傍の地図データを取り込んで利用する。
【0032】
GPS航法利用判別部17では、例えば自立航法利用マップマッチング候補検出部16で、自立航法による現在位置から所定距離内に道路が存在しないことを検出した時のように、自立航法による現在位置の取得の継続によって大きな誤差を生じてきていることを検出した時に、GPS航法適正作動検出部8で現在GPSが適正に作動している事を検出している時のGPS航法現在位置演算部9のデータを用いて、GPS航法利用マップマッチング候補検出部18が、前記自立航法利用マップマッチング候補検出部16の作動の代わりにマップマッチング作動を行う。
【0033】
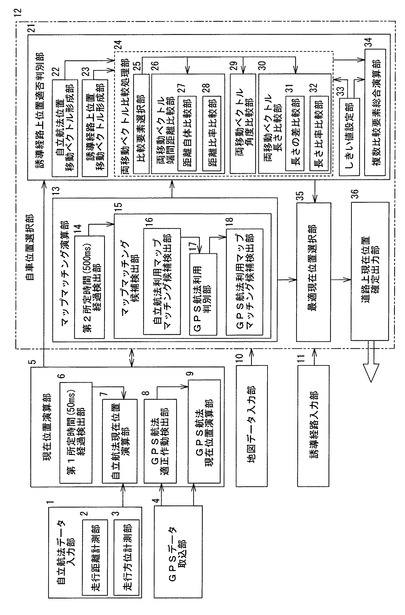
誘導経路上位値適否判別部21では、誘導経路入力部11から現在走行している誘導経路のデータを入力した時、最適現在位置選択部35が前記マップマッチング演算部13でマップマッチング候補を検出した中から最適な現在位置を選択する際、従来のように単に誘導経路となっている道路であるからということでその道路を優先的に選択してしまい、図8に示すような問題を生じることを防止する為の判別を行う。
【0034】
即ち、誘導経路上位置適否判別部21では、マップマッチング演算部13のマップマッチング候補検出部15で、自車位置が存在しうる候補の道路に誘導経路となっている道路が存在することを検出した時その信号を入力し、自立航法位置移動ベクトル形成部22で形成した、自立航法によって得られた移動ベクトルと、誘導経路上位置移動ベクトル形成部23で形成した、誘導経路上にマップマッチングした時の移動ベクトルとを、両移動ベクトル比較処理部24で比較することによって、誘導経路上にマップマッチングした位置が適切であるか否かを判別する。
【0035】
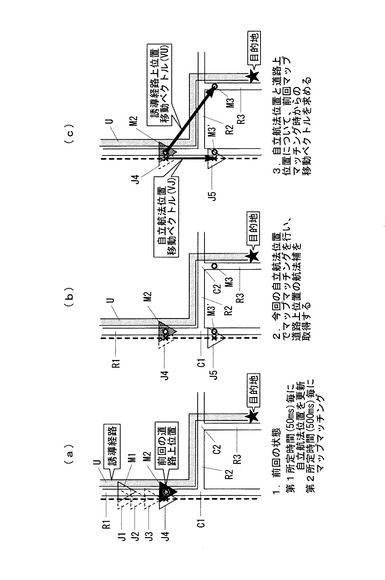
この時の処理は図5及び図6に示している。即ち、図5及び図6には、前記図8の従来例を説明した道路、及び走行の態様と同様の態様を示しており、車両が道路R1上を走行し自立航法によって当該道路上を破線で示すような自立航法位置データが得られる時、誘導経路Uが道路R1から交差点C1で分岐する道路R2を通り、その後直ちに交差点C2で分岐する道路R3を通って、道路R3に面している目的地に直ちに至る例を示している。
【0036】
ここで図5(a)における道路R1上の自立航法位置J1のデータによって道路R1に対してマップマッチングしたマッチング位置M1から、第1の所定時間毎に自立航法位置をJ2、J3と更新し、第2の所定時間毎にマップマッチングを行う時、図示の例では自立航法位置J4で道路R1のマッチング位置M2にマップマッチングした状態を示している。なお、この時の自立航法位置J4を第1自立航法位置とし、そのマップマッチング位置を第1マッチング位置とする。
【0037】
その後同様に自立航法による自立航法位置の更新を行い、図5(b)に示すように本来の誘導経路Uの通り走行せず、交差点C1を直進して自立航法位置J5に至った時再びマップマッチングを行う場合、誘導経路Uが存在する道路R3に対しては、マッチング位置M3がマップマッチング位置の候補となる。また、その際道路R1に対してもマップマッチング候補が存在し、図示の例ではマッチング位置M3’として示している。図示の例では道路R1に対するマッチング位置M3’は自立航法による自立航法位置J5とほぼ同じ位置に存在するものとしている。なお、この時の自立航法による位置である自立航法位置J5を第2自立航法位置とし、そのマップマッチング位置を第2マッチング位置とする。
【0038】
この時、図1の自立航法位置移動ベクトル形成部22では、図5(c)に自立航法位置移動ベクトルVJとして示すように、基点を前記第1自立航法位置である自立航法位置J4とし、先端を前記第2自立航法位置である自立航法位置J5とする位置移動ベクトルを形成する。また、誘導経路上位置移動ベクトル形成部23では、図5(c)に誘導経路上位置移動ベクトルVUとして示すように、基点を前記第1マッチング位置である前回のマッチング位置M2とし、先端を前記第2マッチング位置である道路R3上のマッチング位置M3とする移動位置ベクトルを形成する。
【0039】
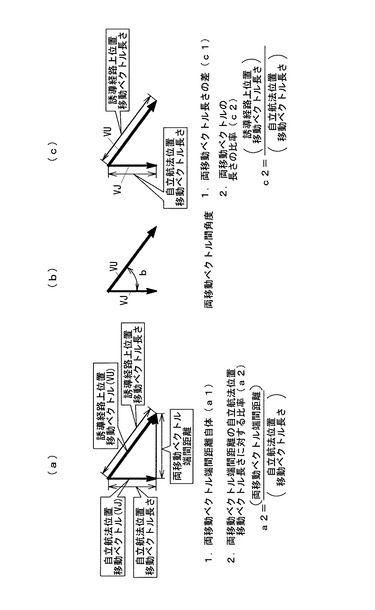
このような自立航法位置移動ベクトルVJと誘導経路位置移動ベクトルVUについて、図1の両移動ベクトル比較処理部24では、両移動ベクトル端間距離比較部26で図6(a)に示すように、また両移動ベクトル角度比較部30で図6(b)に示すように、更に両移動ベクトル長さ比較部30で図6(c)に示すように比較処理を行う。比較要素選択部25では、これらの各種比較部のうち、予め設定した任意の比較要素を選択しておき、その選択された比較部が作動するようにしている。
【0040】
また、それらの比較に際しては、予めしきい値設定部33で任意のしきい値を設定しておき、両ベクトルの比較結果がこの予め設定しているしきい位置を超えたか否かを判別する。また、比較要素選択部25で複数の比較部の比較結果を利用して誘導経路上位置の適否を判別するように設定した時には、複数比較要素総合値演算部34でそれらの比較要素を総合的に演算し、これについてもしきい値設定部33で予め設定してあるしきい値よりも大きいか否かを判別するようにしている。
【0041】
図1の両移動ベクトル端間距離比較部26には、両ベクトルの端間距離の距離自体を比較する距離自体比較部27と、両ベクトルの端間距離について、例えば自立航法位置移動ベクトルの長さに対する比率等の、距離の比率を比較する距離比率比較部28とを備えており、これについても予め比較要素選択部25でいずれかの作動を選択し、或いは両方を比較する作動を行わせる。
【0042】
両移動ベクトル端間距離比較部26の作動は図6(a)に示しており、その中の距離自体比較部27では同図中[1.両移動ベクトル端間距離自体(a1)]として示すように、自立航法位置移動ベクトルVJと誘導経路上位置移動ベクトルVUのベクトル先端間の距離自体の長さが、例えば地図上で15m等の所定のしきい値以内であるか否かを判別する。それに対して距離比率比較部28では、図6(a)に[2.両移動ベクトル端間距離の自立航法位置移動ベクトル長さに対する比率(a2)]として式で示すように演算し、その値が例えば2倍等の所定のしきい値以内であるか否かを判別する。
【0043】
図1の両移動ベクトル角度比較部29では、図6(b)に示すように、自立航法位置移動ベクトルVJと、誘導経路上位置移動ベクトルVUとのなす角度bを計測し、その角度が例えば45度等の所定の角度以内であるか否かを判別する。
【0044】
図1の両移動ベクトル長さ比較部30における長さの差比較部31の作動は図6(c)に[1.両移動ベクトル長さの差(c1)]として示すように、両移動ベクトルの長さの差を計測し、その値が例えば地図上で15m等の所定のしきい値以内であるか否かを判別する。それに対して長さ比率比較部32では、図6(c)の図中に[2.両移動ベクトルの長さの比率(c2)]として式で示すように、自立航法位置移動ベクトルVJの長さに対する誘導経路上位置移動ベクトルの長さの比率を演算し、その値が例えば1.5等のしきい値よりも短いか否かを判別する。
【0045】
複数比較要素総合遅延算部34では、前記各種の両移動ベクトル比較処理の内特定の一つだけではなく、例えば両移動ベクトル端間距離の距離比率比較部28と、両移動ベクトル角度比較部29の両比較結果を用いることにした場合、両方がしきい値以内であるか否かを判別する以外に、それぞれの比較値に所定の重み付け係数を掛けた値によって適否を判別する等の、複数の比較要素について、総合的に演算する。この時の総合的な演算についても、しきい値設定部33に予め設定した値以内にあるか否かを判別する。
【0046】
図1の最適現在位置選択部35では、誘導経路に沿って走行しているときには、誘導経路上位置が自立航法位置から所定距離以内に存在するとき、誘導経路上位置適否判別部21で前記のような適否判別を行って、誘導経路上位置は適切であると判別したときにこの位置を選択し、それ以外の時にはマップマッチング演算部13で演算した道路上の位置の中から最適現在位置を選択する。その選択した現在位置を道路上現在位置確定出力部36からモニタに現在位置表示を行うため出力する。
【0047】
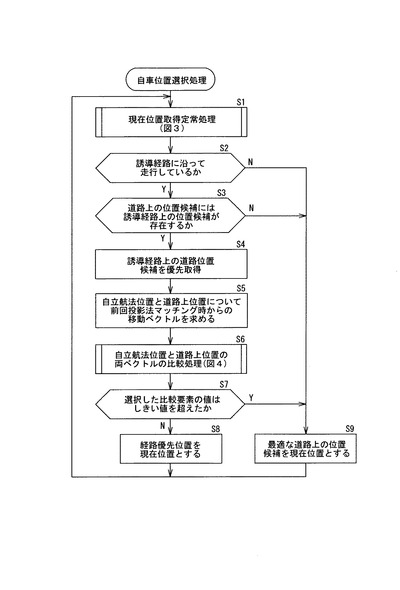
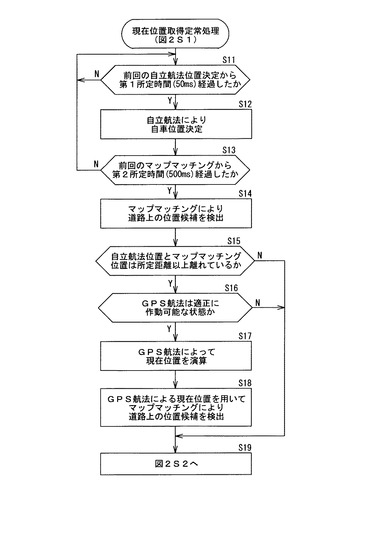
前記のような機能ブロックからなる本発明においては、例えば図2〜図4に示す作動フローにより実施することができる。図2には本発明の自車位置選択処理を行う全体の作動フローを示し、同図に示す自車位置選択処理においては、最初図3に示すような、本発明の主要部の作動を行うための従来から行われている、現在位置取得定常処理を行う(ステップS1)。即ち図3に示す現在位置取得定常処理においては、最初前回の自立航法位置から50ms等の第1所定時間が経過したか否かを判別する(ステップS11)。ここで未だ第1所定時間が経過していないと判別したときには、再びステップS11の作動を繰り返して、第1所定時間が経過するまで待機する。
【0048】
ステップS11で第1所定時間が経過したと判別したときには、自立航法により自車位置を決定する(ステップS12)。この処理は図1の現在位置演算部5における自立航法現在位置演算部7が、第1所定時間経過検出部6において50ms等の第1所定時間が経過したことを検出したとき、自立航法データ入力部1の走行距離計測部2と走行方位計測部3のデータによって、前回決定した自車位置からの距離と方位に基づいて新たな自車位置を決定することによって行われる。
【0049】
その後、前回のマップマッチングから500ms等の第2所定時間が経過したか否かを判別して(ステップS13)、未だ経過していないときには再びステップS11に戻って自立航法により自車位置を決定する作動を行いながら第2所定時間が経過するまで待機する。ステップS13で前回のマップマッチングから第2所定時間が経過したと判別したときには、マップマッチングにより道路上の位置候補を検出する(ステップS14)。この作動は図1のマップマッチング演算部13におけるマップマッチング候補検出部15が、第2所定時間経過検出部14で、500ms等の所定時間が経過したことを検出したとき、自立航法利用マップマッチング候補検出部16で、マップマッチングによる道路上の位置候補を検出することにより行う。
【0050】
次いで自立航法位置とマップマッチング位置は所定距離以上離れているか否かを判別する(ステップS15)。ここで自立航法位置とマップマッチング位置が例えば100m等の所定距離以上離れていると判別したときには、GPS航法は適正に作動可能な状態か否かを判別し(ステップS16)、適正に作動可能な状態にあると判別したときにはGPS航法によって現在位置を演算する(ステップS17)。その後GPS航法による現在位置を用いてマップマッチングにより道路上の位置候補を検出する(ステップS18)。
【0051】
この作動は図1のマップマッチング候補検出部15におけるGPS航法利用判別部17において、自立航法利用マップマッチング候補検出部16で例えば自立航法位置から100m等の所定距離以内にマッチングする道路が存在しないことを検出したときにGPS航法を利用するものと判別し、GPS航法現在位置演算部9で演算した現在位置に基づいてマップマッチングを行い、マップマッチング演算部13のGPS航法利用マップマッチング候補検出部18が、候補となる道路を検出する事により行う。
【0052】
図3の例においては、その後前記ステップS15において自立航法位置とマップマッチング位置は所定距離以上離れていない、即ち所定距離以内であると判別したとき、及びステップS16でGPS航法は適正に作動可能な状態になっていないと判別したときと共にステップS19において図2のステップS2に進む。
【0053】
図2のステップS2においては、ステップS1で前記図3に示す作動を行った後、誘導経路に沿って走行しているか否かを判別する。ここで誘導経路を走行していると判別したときには、道路上の位置候補には誘導経路上の位置候補が存在するか否かを判別する(ステップS3)。ここで誘導経路に沿って走行していると判別したときには、道路上の位置候補には誘導経路上に位置候補が存在するか否かを判別する(ステップS3)。ここではステップS1において前記のように自立航法或いはGPS航法で得られた自車位置について周囲の道路にマップマッチングを行うとき、マップマッチングを行う条件の道路を検出した際、その道路の中に誘導経路となっている道路が存在するか否かを判別する。
【0054】
ステップS3において、道路上の位置候補には誘導経路上の位置候補が存在すると判別したときには、誘導経路上の道路位置候補を優先取得する(ステップS7)。その後自立航法位置と道路上位置について、前回投影法マップマッチング時からの移動ベクトルを求める(ステップS5)。なお、ここでは自立航法位置として示しているが、前記のように自立航法を継続することにより誤差が大きくなったとき、GPS航法を利用して自立航法の位置に代える作動を行ったときには、その位置を用いることとなる。
【0055】
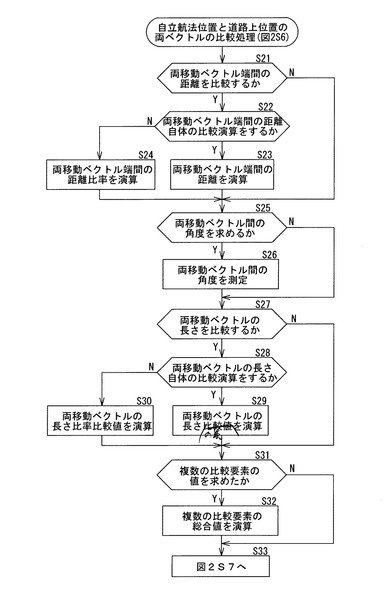
次いで図4に示すような、自立航法位置と道路上位置の両ベクトルの比較処理を行う(ステップS6)。図4に示す自立航法位置と道路上位置の両ベクトルの比較処理の例においては、最初前記図6(a)に示すような、両移動ベクトル端間の距離を比較する処理を行うか否かを判別し(ステップS21)、ここでこのような処理を行わないと判別したときには図6(b)のような、両移動ベクトル間の角度を求めるか否かを判別する(ステップS25)。ここでこのような処理を行わないと判別したときには、図6(c)のような、両移動ベクトルの長さを比較するか否かの判別をしている(ステップS27)。したがって、図4に示す例においては、図1の両移動ベクトル比較処理部24における比較要素選択部25で予め決めている処理を、前記作動フローのいずれかで処理することにより実行することができる。但し、それらの判別の順序、処理の順序は問わない。
【0056】
図4に示す例においては、ステップS21において両移動ベクトル端間の距離を比較すると判別したときには、両移動ベクトル端間の距離自体の比較演算をするか否かを判別している(ステップS22)。ここで両移動ベクトル端間の距離自体の比較演算を行うと判別したときにはステップS23において、両移動ベクトル端間の距離を演算する。ここで演算した両移動ベクトル端間の距離は、その後図2のステップS7において、しきい値を超えたか否かの判別が行われ、例えば地図上での距離が15mを超えたか否かを判別し、このしきい値を超えないときだけステップS8において経路優先位置を現在位置とする処理がなされる。
【0057】
図4のステップS22において両移動ベクトル端間の距離自体の比較演算を行わないと判別したときには、両移動ベクトル端間の距離比率を演算する(ステップS24)。ここで距離比率を演算したときには、その後図2のステップS7でしきい値と比較する場合には、例えば自立航法位置移動ベクトルの長さ対、両移動ベクトル端間の距離が、1対2に設定する、等の設定値との比較を行う。
【0058】
図6(a)に示すように両移動ベクトル端間の距離を比較する手法として、予め両移動ベクトル端間の距離自体を演算する場合と、両移動ベクトル端間距離の自立航法位置移動ベクトル長さに対する割合を演算する場合とが存在し、ステップS22ではいずれかを選択するようにしている。しかしながら、両移動ベクトル端間の距離自体を演算した値と、両移動ベクトル端間の距離比率を演算した値の両方の値で、経路優先位置を採用するか否かを検討する場合が存在するときには、図4のステップS23の後に両移動ベクトル端間の距離比率を演算するか否かの判別を用意し、ステップS22で両移動ベクトル端間の距離自体の比較演算を行わないと判別したとき、及びステップS23で両移動ベクトル端間の距離を演算した後と共に、前記両移動ベクトル端間の距離比率を演算するか否かの判別を行うようにし、その距離比率の演算を行うと判別したときには、続く処理で両移動ベクトルの端間の距離比率を演算し、その距離比率の演算を行わないと判別したときには前記演算処理を行ったときと共に図4のステップS25に進むように変更することによって実施することができる。
【0059】
図4に示す例においてはステップS21で両移動ベクトル端間の距離を比較しないと判別したとき、及びステップS23並びにステップS24の各処理を行ったときにはステップS25に進み、両移動ベクトル間の角度を求めるか否かの判別を行う。ここで両移動ベクトル間の角度を求めると判別したときには、図6(b)のように自立航法位置移動ベクトルVJと、誘導経路上位置移動ベクトルVU間の角度を測定する(ステップS26)。その後図2のステップS7でしきい値と比較する際には、例えば45度等の所定の角度と比較する。
【0060】
次いで前記ステップS25において両移動ベクトル間の角度を求めないと判別したときと共にステップS27に進み、両移動ベクトルの長さを比較するか否かを判別する。ここで両移動ベクトルの長さを比較すると判別したときには、ステップS29において両移動ベクトルの長さの差を演算する。ここで両移動ベクトルの長さの差を求めたときには、図2のステップS7でしきい値と比較する際は、例えば地図上で15m等の所定の値と比較することとなる。
【0061】
ステップS28で両移動ベクトルの長さ自体の比較演算を行わないと判別したときには、両移動ベクトルの長さの比率の比較値を演算する(ステップS30)。ここで両移動ベクトルの長さの比率を求めたときには、図2のステップS7でしきい値と比較する際は、例えば自立航法位置移動ベクトル長さ対誘導経路上位置移動ベクトルの長さが、2対3以上であるか否か等の判別を行う。
【0062】
その後図4の例においては、ステップS27で両移動ベクトルの長さを比較する処理を行わないと判別したときと共に、複数の比較要素の値を求めるか否かの判別を行っている。即ち図4の例においては前記のような各種の両ベクトルの比較処理を任意に選択して行うことができるようにすると共に、例えばステップS23で両移動ベクトル端間の距離を演算する処理と、ステップS26で両移動ベクトル間の角度を測定する処理を行ったとき、それらの複数の比較要素を総合的に演算することができるようにしている。
【0063】
それにより例えば前記の例では、ステップS23で両移動ベクトル端間の距離を演算したとき地図上距離で13mであり、ステップS26で両移動ベクトル間の角度を測定したとき40度であった場合、それぞれの値を指数化すると共に各々に重み付けの係数を掛けた値を演算する、等の処理を行う。ここで得られた値についても、図2のステップS7で予め設定したしきい値と比較して、誘導経路優先処理を行うか否かの判別に利用する。
【0064】
ステップS32の処理の後は、前記ステップS31で複数の比較要素の値を求めなかった、即ち各種比較要素の内1つだけを選択したときと共にステップS33において図2のステップS7に進む。ステップS7では前記図4のステップS23、S24、S26、S29、S30、及びS32で演算や測定をした値と、予めこれらに対応して設定したしきい値との比較を行い、しきい値を超えていないか、即ち誘導経路優先の処理を行っても良い条件の範囲であるか否かを判別する。ここで選択した比較要素の値がしきい値を超えてはいないと判別したときには、誘導経路優先位置を現在位置とする(ステップS8)。それに対してステップS7で選択した比較要素の値はしきい値を超えたと判別したとき、及びステップS2で誘導経路に沿って走行していないと判別したとき、並びにステップS3で道路上の位置候補には誘導経路上の位置候補が存在しないと判別したときと共に、ステップS9において最適な道路上の位置候補を現在位置とする。
【0065】
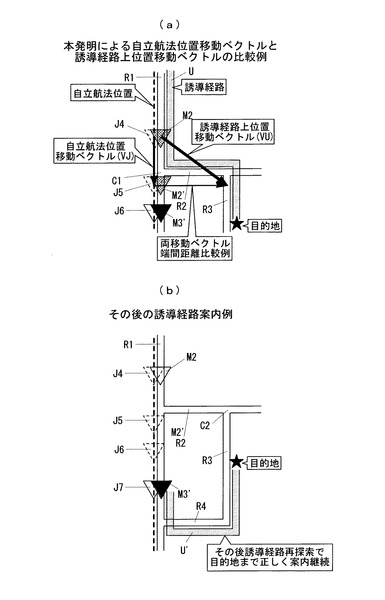
上記のような処理を行う結果、従来は図8(a)に示すように自立航法位置J5において、誘導経路Uの道路R3上のマッチング位置M2に自車位置を表示し、その後の走行により道路R3上の目的地に直ちに到達してしまったとき、同図(b)のように、間違った到着判定により自立航法位置J7でのマッチング位置M4以降の経路案内を停止してしまい、目的地表示もなくなってしまうことによってその後の走行が困難になる問題を、図7に示すような処理を行うことによって解決する。
【0066】
即ち、図7(a)には自立航法位置移動ベクトルVJと誘導経路上位置移動ベクトルVUについて、図6(a)に示す態様により、両移動ベクトルの端間距離を比較する例を示しており、この比較によって例えば両移動ベクトルの端間距離が、地図上で20mであり、予め設定したしきい値である15mを超えていたとき、誘導経路優先の処理を行うことは適切ではないと判別する。その結果自立航法位置J5において道路R1に対するマッチング位置M2’が誘導経路優先を行わない最適な道路上の位置候補であるとして自車位置をここに表示する。
【0067】
その後は図7(b)に示すように誘導経路Uが消去されると共に、自車位置J4において道路R1にマップマッチングを行い、マッチング位置M3’に自車位置を表示する。また、この過程で目的地に対する新たな誘導経路を再探索し、交差点C3で分岐する道路R4を通り、道路R3を通って目的地に至る誘導経路U’を表示する。それにより以降はこの再探索された誘導経路U’にしたがった案内が行われ、容易に目的地に到達することができ、図8(b)に示す従来の問題点を解消することができる。
【符号の説明】
【0068】
1 自立航法データ入力部
2 走行距離計測部
3 走行方位計測部
4 GPSデータ取込部
5 現在位置演算部
6 第1所定時間経過検出部
7 自立航法現在位置演算部
8 GPS航法適正作動検出部
9 GPS航法現在位置演算部
10 地図データ入力部
11 誘導経路入力部
12 自車位置選択部
13 マップマッチング演算部
14 第2所定時間経過検出部
15 マップマッチング候補検出部
16 自立航法利用マップマッチング候補検出部
17 GPS航法利用判別部
18 GPS航法利用マップマッチング候補検出部
21 誘導経路上位置適否判別部
22 自立航法位置移動ベクトル形成部
23 誘導経路上位置移動ベクトル形成部
24 両移動ベクトル比較処理部
25 比較要素選択部
26 両移動ベクトル端間距離比較部
27 距離自体比較部
28 距離比率比較部
29 両移動ベクトル角度比較部
30 両移動ベクトル長さ比較部
31 長さの差比較部
32 長さ比率比較部
33 しきい値設定部
34 複数比較要素総合演算部
35 最適現在位置選択部
36 道路上現在位置確定出力部
【技術分野】
【0001】
本発明は車両用ナビゲーション装置において、車両が誘導経路に沿って走行している時、自立航法やGPS航法によって得られた自車位置を、誘導経路上に誤ってマップマッチングする事がないようにした、自車位置選択方法、及びその方法を実施する装置に関する。
【背景技術】
【0002】
一般のナビゲーション装置においては、地図を描画するための地図データ及び施設等を検索するための施設情報データを記録したDVD、ハードディスク等の地図・情報データ記録媒体と、この地図・情報データ記録媒体のデータを取り込むデータ取込装置と、地図等を表示するモニタと、必要に応じてGPS受信機及び走行距離センサやジャイロ等を用いた自立航法装置を用い、現在位置及び進行方向の方位を検出する現在位置検出装置を有し、現在位置を含む地図データを地図・情報データ記録媒体から取り込み、この地図データに基づいて現在位置の周囲の地図画像をモニタの画面に描画すると共に、現在位置マークをモニタ画面に重ね合わせて表示し、ナビゲーション装置の移動に応じて地図画像をスクロール表示し、或いは地図画像を画面に固定し現在位置マークを移動させ、現在どこを移動しているのかを一目でわかるようにしている。
【0003】
DVD或いはハードディスク等の地図・情報データ記録媒体に記録されている地図データは、各種の縮尺レベルに応じて適当な大きさの経度幅及び緯度幅に区切られており、道路等は経度及び緯度で表現されたノードの座標集合として記憶されている。道路は2以上のノードの連結からなり、地図データは、道路リスト、ノードテーブル及び交差点構成ノードリスト等からなる道路レイヤ、及び地図画面上に道路、建築物、施設、公園及び河川等を表示するための背景レイヤ等の地図データと、市町村名などの行政区画名、道路名、交差点名及び施設の名前等の、文字や地図記号等を表示するための情報データなどから構成される。
【0004】
また、このナビゲーション装置においては、利用者が所望の目的地或いは経由地に向けて道路を間違うことなく容易に走行できるようにするための経路誘導機能を備えている。この経路誘導機能によれば、種々の手段により目的地を設定し、出発地から目的地まで、これらの地点を結ぶ経路の内各種の条件を加味して適切な経路を演算して提示するようになっている。また、利用者が選択した経路を誘導経路として記憶しておき、走行中、地図画像上に誘導経路を他の経路とは色を変えて太く描画して画面表示したり、誘導経路上の進路を変更すべき交差点に一定距離以内に近づいたときに、交差点を拡大表示し、進路を変更すべき方向を示す矢印等を描画して画面表示したり、音声で右左折の誘導を行うことで、利用者を目的地まで案内することができるようにしている。
【0005】
前記のようなナビゲーション装置において現在位置を地図上に表示することは基本的なことであり、その位置が正確であることは極めて重要なことである。車両の現在位置を検出するには、前記のようにGPS受信機を用いて現在位置を検出することができるが、GPSは必ずしも常に受信できるとは限らず、ビルの陰、トンネル内、山の陰等では正確な現在位置データを得ることができない。また、その位置データは近年精度は向上したものの、未だ必ずしも充分ではない。
【0006】
それに対して走行距離センサやジャイロ等を用いた自立航法によると、車輪の回転数や回転角のデータを用いて高速で走行距離を求めることができ、3次元方向検出可能な極小のジャイロを用いることによって相対的な走行方向の検出も容易であり、短距離での移動の検出には適している。しかしながら、この自立航法では前回検出した地点からの位置を累積するものであり、走行方向も前回検出した方位に対する変化を累積して検出するものであるため、次第に誤差が蓄積し、実際の位置からは次第にずれていってしまう。
【0007】
そのため広く用いられているナビゲーション装置では、上記のような自立航法による現在位置の測定を例えば50ms程度の短時間毎に行い、それを10回程度行った例えば500ms毎に、自立航法による現在位置を、周囲の適切と思われる道路上に合わせて表示するマップマッチングを行っている。マップマッチングの手法についても種々の手法が提案されているが、前記のようにして得られた現在位置から所定距離の範囲内の道路について、走行パターンと同じパターンの道路を現在走行している道路とするパターンマッチング手法や、現在位置から例えば100m等の所定の距離の範囲内に存在する道路に対して、最短距離の地点を求め、複数の道路候補があるときには、最も距離の短い道路上の前記地点を現在位置として地図画面上に表示する投影法等が用いられている。
【0008】
上記マップマッチング手法の内、現在広く用いられている前記投影法によると、図9(a)に示すように行う。即ち、道路Raと道路Rbとが交差点Cで交差している道路地図上で、最初道路Ra上のP1の位置に存在していた車両が、自立航法ではP2の位置に存在することになっている時、このP2の位置から例えば100m等の所定距離rの範囲内に存在する道路を検出し、ここで道路Raと道路Rbが存在することが検出された時、P2の位置からの各道路に対する最短距離の地点を得るために、各道路に直角の線を降ろして各道路上の地点A及びBを求める。このときの各垂直線の長さLaとLbを比較し、より短い方が実際の道路上の位置であるとして、図9(a)の例ではLa<Lbであることにより、同図(b)のように道路Ra上の地点Aを道路上の現在位置とする。
【0009】
投影法のマップマッチングでは上記のような処理を行い、その過程で自立航法で測定した現在位置では、所定距離以内に投影すべき道路が存在しなくなった時、GPSによるデータが適正である場合には、GPSを受信して現在位置を求め、これを自立航法の現在位置に替えて、その位置で前記と同様にマッチングさせる道路を選択し、地図の道路上に現在位置を表示している。
【0010】
更に、車両が誘導経路に沿って走行している時は、運転者は原則として提示した誘導経路に沿って走行しているものとし、所定距離以内に誘導経路が存在する時には原則として誘導経路の方を選択する。またその時、前記図9(c)のように、同図(a)の前記垂直線の長さLaとLbについて、そのまま比較するのではなく、適宜の重み付け係数K1、K2を掛け、その係数は誘導経路側を小さい値として、より自立航法位置に近いものとし、誘導経路が選択されやすくすることにより、「誘導経路優先」の手法を用いることが多い。図9(c)の例においては、同図(a)のように自立航法の現在位置P2が道路Raの方が近いにもかかわらず、前記手法によって予め設定されている誘導経路となっている道路Rbが選択され、その結果道路RbのBの位置にマップマッチングを行う例を示している。
【0011】
上記のようなマップマッチング時に所定距離内に複数の道路候補が存在する時、誘導経路の道路について重み付けを大きくし、優先的に現在位置を当該誘導経路の道路とする技術は、特開平8−68656号公報(特許文献1)に開示している。
【先行技術文献】
【特許文献】
【0012】
【特許文献1】特開平8−68656号公報
【発明の概要】
【発明が解決しようとする課題】
【0013】
前記特許文献に記載しているようなマップマッチング手法においては、誘導経路に対して重み付けを大きくする結果、時には図8に示すような問題が生じることがある。図8(a)に示す例においては、車両が道路R1上を走行し自立航法によって当該道路上を破線で示すような自立航法位置データが得られる時、誘導経路Uが道路R1から交差点C1で分岐する道路R2を通り、その後直ちに交差点C2で分岐する道路R3を通って、当該道路R3に面している目的地に直ちに至る例を示している。
【0014】
ここで図8(a)における道路R1上の自立航法位置J4のデータによってマップマッチングしたマッチング位置M2から車両が走行し、例えば50ms毎に自立航法位置を更新し、500ms毎にマップマッチングを行う時、車両は本来は誘導経路Uに沿って交差点C1から左折し、道路R2を通らなければならないところ、これに気づかず交差点C1を直進してしまった時には、次のマップマッチングを交差点C1を過ぎた自立航法位置J5で行うと、この自立航法位置J5から例えば100m等の所定距離以内に道路R2から交差点C2で分岐する道路R3が存在し、特にこの道路R3が現在走行している道路R1とほぼ平行に位置していると共に、この道路が特に誘導経路であることによって、マップマッチング位置は誘導経路優先を採用し、マッチング位置M2に現在車両が存在すると認識してしまう。
【0015】
その後更にそのまま道路R1上を走行すると、自立航法位置J6においては、一旦前記のようにマップマッチングしたマッチング位置M2について、そのまま道路R1とほぼ平行な道路R3を走行しているものとして表示し、マッチング位置M3に車両が存在すると認識する。このマッチング位置M3がほぼ目的地であるときには、車両が目的地付近に到着したものとしてその後誘導経路の案内を停止する。
【0016】
そのため、以降は誘導経路優先は行われず、例えば図8(b)に示すように、自立航法による自立航法位置J7では、マップマッチングによって道路R1上のマッチング位置M4に現在存在するものとして正しく表示されるものの、前記のような間違った到着判定により、その後の経路案内は停止されるため、目的地表示も消えると共に先の目的地データもその後の走行には直ちに用いられることがないので、以降はどのようにして先に設定した目的地に走行したらよいかわからなくなる。そのため以降は再度目的地を設定して、新たな誘導経路を表示させる必要が生じる。
【0017】
上記のように、自立航法による自立航法位置を道路表示に一致させるマップマッチングを行う時、特に誘導経路について優先的にマッチングさせる場合は、全く違う道路を走行しているように表示してしまう問題を生じやすい。更に、その間違ったマッチング表示を行っている時、その自車位置表示によって目的地に到着した時、以降は目的地への案内は行われなくなってしまう問題も生じる。
【0018】
したがって本発明は、自立航法による自立航法位置を道路表示に一致させるマップマッチングを行う時、特に誘導経路について優先的にマッチングさせる際に、大きく異なる道路を走行しているように表示してしまう問題を解決し、間違ったマッチング表示を行っている時、その自車位置の認識によって目的地に到着した時、以降は目的地への案内は行われなくなってしまう問題も解決することを目的とする。
【課題を解決するための手段】
【0019】
本発明に係る自車位置選択方法は、前記課題を解決するため、自立航法により第1自立航法位置を演算し、当該第1自立航法位置を誘導経路を優先して近くの道路に投影し第1マッチング位置を求め、所定時間経過後に同様にして第2自立航法位置と第2マッチング位置を求め、前記第2マッチング位置が誘導経路上であるとき、前記第1自立航法位置を基点として前記第2自立航法位置を先端とする自立航法位置移動ベクトルと、前記第1マッチング位置を基点として前記第2マッチング位置を先端とする誘導経路上位置移動ベクトルとを求め、前記自立航法位置移動ベクトルと前記誘導経路上位置移動ベクトルとを比較して比較値を求め、当該比較値が予め設定したしきい値を超えるときには前記第2マッピング位置を現在位置としては選択しないことを特徴とする。
【0020】
本発明に係る他の自車位置選択方法は、前記自車位置選択方法において、前記自立航法位置移動ベクトルと誘導経路上位置移動ベクトルとの比較値は、両移動ベクトルの先端間の長さ自体であることを特徴とする。
【0021】
本発明に係る他の自車位置選択方法は、前記自車位置選択方法において、前記自立航法位置移動ベクトルと誘導経路上位置移動ベクトルとの比較値は、両移動ベクトルの先端間の長さと前記自立航法位置移動ベクトルの長さの比率であることを特徴とする。
【0022】
本発明に係る他の自車位置選択方法は、前記自車位置選択方法において、前記自立航法位置移動ベクトルと誘導経路上位置移動ベクトルとの比較値は、両移動ベクトルのなす角度であることを特徴とする。
【0023】
本発明に係る他の自車位置選択方法は、前記自車位置選択方法において、前記自立航法位置移動ベクトルと誘導経路上位置移動ベクトルとの比較値は、両移動ベクトルの長さの差であることを特徴とする。
【0024】
本発明に係る他の自車位置選択方法は、前記自車位置選択方法において、前記自立航法位置移動ベクトルと誘導経路上位置移動ベクトルとの比較値は、両移動ベクトルの長さの比率であることを特徴とする。
【0025】
本発明に係る自車位置選択方法は、前記課題を解決するため、自立航法により現在位置を演算する自立航法現在位置演算部と、前記自立航法位置演算部で演算した自立航法位置を、近くの道路に投影して道路上の現在位置を演算するマップマッチング演算部と、前記マップマッチング演算部で投影する道路が誘導経路であるとき、前記マップマッチングが適切であるか否かを判別する誘導経路上位置適否判別部とを備え、前記誘導経路上位値適否判別部には、前記自立航法現在位置演算部で演算した第1自立航法位置を基点とし、前記第1自立航法演算後の所定時間経過後に同様にして演算した第2自立航法位置を先端とする自立航法位置移動ベクトルを形成する自立航法位置移動ベクトル形成部と、前記マップマッチング演算部で演算した前記第1自立航法位置のマッチング位置を基点とし、前記第2自立航法位置の誘導経路へのマッチング位置を先端とする誘導経路上位置移動ベクトルを形成する誘導経路位置移動ベクトル形成部と、前記自立航法位置移動ベクトルと前記誘導経路上位置移動ベクトルとを比較した値と、予め設定したしきい値とを比較する両移動ベクトル比較処理部とを備え、前記両移動ベクトル比較処理部の処理で、前記比較値がしきい値を超えたとき、前記第2自立航法位置の誘導経路へのマッチング位置を採用しない現在位置選択部を備えたことを特徴とする。
【発明の効果】
【0026】
本発明は上記のように構成したので、自立航法による自車位置を道路表示に一致させるマップマッチングを行う時、特に誘導経路について優先的にマッチングさせる際に、大きく異なる道路を走行しているように表示してしまう問題を解決することができ、正しい自車位置表示を行うことができる。また、間違ったマッチング表示を行っている時、その自車位置表示によって目的地に到着した時、以降は目的地への案内は行われなくなってしまうことにより、その後の走行が困難になる問題も可決することができる。
【図面の簡単な説明】
【0027】
【図1】本発明の実施例の機能ブロック図である。
【図2】同実施例における自車位置選択処理の作動フロー図である。
【図3】図2の現在位置取得定常処理を行う作動フロー図である。
【図4】図2の自立航法位置と道路上位置の両ベクトルの比較処理を行う作動フロー図である。
【図5】本発明の作動例の説明図である。
【図6】本発明において自立航法位置と道路上位置の両ベクトルの各種比較処理を行う態様を示す説明図である。
【図7】本発明によって従来の問題点を解決した例を示す説明図である。
【図8】従来例の問題点を示す説明図である。
【図9】従来から行われている投影法マップマッチングと、その作動例を示す図である。
【発明を実施するための形態】
【実施例】
【0028】
本発明の実施例を図面に沿って説明する。図1は本発明の機能ブロック図であり、本発明を各種の態様で実施できるようにした例を示し、本発明はこれらの機能ブロックの内適宜のものを選択して実施することができる。図1の自車位置選択装置においては、自車の現在位置を演算するに際して、自立航法データとGPSデータとを用い、自立航法データ入力部1では車速パルスを計測する等の走行距離計測部2と、ジャイロによる走行方位計測部3とを備えている。GPSデータ取込部4では、従来と同様のGPS航法によるデータを取り込んでいる。
【0029】
現在の車両位置を演算する現在位置演算部5には、例えば50ms等の第1所定時間が経過したことを検出する第1所定時間経過検出部6を備え、ここで第1所定時間経過したことを検出した時には、自立航法現在位置演算部7は、自立航法データ入力部で入力した走行距離計測部2のデータと、走行方位計測部3のデータによって、先に計測した位置に累積させながら現在位置を演算する。
【0030】
また、現在位置演算部5のGPS航法適正作動検出部8では、GPSデータ取込部4で取り込んだデータによって、受信できる衛星の数等により、現在のGPSデータは現在位置を計測するのに充分であるか否かを検出する。また、GPS航法現在位置演算部9ではGPS航法適正作動検出部8で現在適正に作動していることを出力している時には、GPSデータ取込部4で取り込んだデータによって現在位置を演算する。
【0031】
本発明の主要部となる自車位置選択部12にはマップマッチング演算部13を備え、ここでは例えば500ms等の第2所定時間経過したか否かを検出する第2所定時間経過検出部14を備えており、マップマッチング候補検出部15では、現在位演算部5で演算した現在位置を中心に、例えば100m等の所定距離内に存在する地図の道路の上における位置候補を検出するための、マップマッチング候補検出部16を備える。その中の自立航法利用マップマッチング候補検出部16では、自立航法現在位置演算部7で得られた自立航法による現在位置について、その現在位置から例えば100m以内等の所定距離内の全ての道路について、現在位置となりうる候補を検出する。その際には地図データ入力部10から、DVD、HDD等のデータ記録媒体から自車両位置近傍の地図データを取り込んで利用する。
【0032】
GPS航法利用判別部17では、例えば自立航法利用マップマッチング候補検出部16で、自立航法による現在位置から所定距離内に道路が存在しないことを検出した時のように、自立航法による現在位置の取得の継続によって大きな誤差を生じてきていることを検出した時に、GPS航法適正作動検出部8で現在GPSが適正に作動している事を検出している時のGPS航法現在位置演算部9のデータを用いて、GPS航法利用マップマッチング候補検出部18が、前記自立航法利用マップマッチング候補検出部16の作動の代わりにマップマッチング作動を行う。
【0033】
誘導経路上位値適否判別部21では、誘導経路入力部11から現在走行している誘導経路のデータを入力した時、最適現在位置選択部35が前記マップマッチング演算部13でマップマッチング候補を検出した中から最適な現在位置を選択する際、従来のように単に誘導経路となっている道路であるからということでその道路を優先的に選択してしまい、図8に示すような問題を生じることを防止する為の判別を行う。
【0034】
即ち、誘導経路上位置適否判別部21では、マップマッチング演算部13のマップマッチング候補検出部15で、自車位置が存在しうる候補の道路に誘導経路となっている道路が存在することを検出した時その信号を入力し、自立航法位置移動ベクトル形成部22で形成した、自立航法によって得られた移動ベクトルと、誘導経路上位置移動ベクトル形成部23で形成した、誘導経路上にマップマッチングした時の移動ベクトルとを、両移動ベクトル比較処理部24で比較することによって、誘導経路上にマップマッチングした位置が適切であるか否かを判別する。
【0035】
この時の処理は図5及び図6に示している。即ち、図5及び図6には、前記図8の従来例を説明した道路、及び走行の態様と同様の態様を示しており、車両が道路R1上を走行し自立航法によって当該道路上を破線で示すような自立航法位置データが得られる時、誘導経路Uが道路R1から交差点C1で分岐する道路R2を通り、その後直ちに交差点C2で分岐する道路R3を通って、道路R3に面している目的地に直ちに至る例を示している。
【0036】
ここで図5(a)における道路R1上の自立航法位置J1のデータによって道路R1に対してマップマッチングしたマッチング位置M1から、第1の所定時間毎に自立航法位置をJ2、J3と更新し、第2の所定時間毎にマップマッチングを行う時、図示の例では自立航法位置J4で道路R1のマッチング位置M2にマップマッチングした状態を示している。なお、この時の自立航法位置J4を第1自立航法位置とし、そのマップマッチング位置を第1マッチング位置とする。
【0037】
その後同様に自立航法による自立航法位置の更新を行い、図5(b)に示すように本来の誘導経路Uの通り走行せず、交差点C1を直進して自立航法位置J5に至った時再びマップマッチングを行う場合、誘導経路Uが存在する道路R3に対しては、マッチング位置M3がマップマッチング位置の候補となる。また、その際道路R1に対してもマップマッチング候補が存在し、図示の例ではマッチング位置M3’として示している。図示の例では道路R1に対するマッチング位置M3’は自立航法による自立航法位置J5とほぼ同じ位置に存在するものとしている。なお、この時の自立航法による位置である自立航法位置J5を第2自立航法位置とし、そのマップマッチング位置を第2マッチング位置とする。
【0038】
この時、図1の自立航法位置移動ベクトル形成部22では、図5(c)に自立航法位置移動ベクトルVJとして示すように、基点を前記第1自立航法位置である自立航法位置J4とし、先端を前記第2自立航法位置である自立航法位置J5とする位置移動ベクトルを形成する。また、誘導経路上位置移動ベクトル形成部23では、図5(c)に誘導経路上位置移動ベクトルVUとして示すように、基点を前記第1マッチング位置である前回のマッチング位置M2とし、先端を前記第2マッチング位置である道路R3上のマッチング位置M3とする移動位置ベクトルを形成する。
【0039】
このような自立航法位置移動ベクトルVJと誘導経路位置移動ベクトルVUについて、図1の両移動ベクトル比較処理部24では、両移動ベクトル端間距離比較部26で図6(a)に示すように、また両移動ベクトル角度比較部30で図6(b)に示すように、更に両移動ベクトル長さ比較部30で図6(c)に示すように比較処理を行う。比較要素選択部25では、これらの各種比較部のうち、予め設定した任意の比較要素を選択しておき、その選択された比較部が作動するようにしている。
【0040】
また、それらの比較に際しては、予めしきい値設定部33で任意のしきい値を設定しておき、両ベクトルの比較結果がこの予め設定しているしきい位置を超えたか否かを判別する。また、比較要素選択部25で複数の比較部の比較結果を利用して誘導経路上位置の適否を判別するように設定した時には、複数比較要素総合値演算部34でそれらの比較要素を総合的に演算し、これについてもしきい値設定部33で予め設定してあるしきい値よりも大きいか否かを判別するようにしている。
【0041】
図1の両移動ベクトル端間距離比較部26には、両ベクトルの端間距離の距離自体を比較する距離自体比較部27と、両ベクトルの端間距離について、例えば自立航法位置移動ベクトルの長さに対する比率等の、距離の比率を比較する距離比率比較部28とを備えており、これについても予め比較要素選択部25でいずれかの作動を選択し、或いは両方を比較する作動を行わせる。
【0042】
両移動ベクトル端間距離比較部26の作動は図6(a)に示しており、その中の距離自体比較部27では同図中[1.両移動ベクトル端間距離自体(a1)]として示すように、自立航法位置移動ベクトルVJと誘導経路上位置移動ベクトルVUのベクトル先端間の距離自体の長さが、例えば地図上で15m等の所定のしきい値以内であるか否かを判別する。それに対して距離比率比較部28では、図6(a)に[2.両移動ベクトル端間距離の自立航法位置移動ベクトル長さに対する比率(a2)]として式で示すように演算し、その値が例えば2倍等の所定のしきい値以内であるか否かを判別する。
【0043】
図1の両移動ベクトル角度比較部29では、図6(b)に示すように、自立航法位置移動ベクトルVJと、誘導経路上位置移動ベクトルVUとのなす角度bを計測し、その角度が例えば45度等の所定の角度以内であるか否かを判別する。
【0044】
図1の両移動ベクトル長さ比較部30における長さの差比較部31の作動は図6(c)に[1.両移動ベクトル長さの差(c1)]として示すように、両移動ベクトルの長さの差を計測し、その値が例えば地図上で15m等の所定のしきい値以内であるか否かを判別する。それに対して長さ比率比較部32では、図6(c)の図中に[2.両移動ベクトルの長さの比率(c2)]として式で示すように、自立航法位置移動ベクトルVJの長さに対する誘導経路上位置移動ベクトルの長さの比率を演算し、その値が例えば1.5等のしきい値よりも短いか否かを判別する。
【0045】
複数比較要素総合遅延算部34では、前記各種の両移動ベクトル比較処理の内特定の一つだけではなく、例えば両移動ベクトル端間距離の距離比率比較部28と、両移動ベクトル角度比較部29の両比較結果を用いることにした場合、両方がしきい値以内であるか否かを判別する以外に、それぞれの比較値に所定の重み付け係数を掛けた値によって適否を判別する等の、複数の比較要素について、総合的に演算する。この時の総合的な演算についても、しきい値設定部33に予め設定した値以内にあるか否かを判別する。
【0046】
図1の最適現在位置選択部35では、誘導経路に沿って走行しているときには、誘導経路上位置が自立航法位置から所定距離以内に存在するとき、誘導経路上位置適否判別部21で前記のような適否判別を行って、誘導経路上位置は適切であると判別したときにこの位置を選択し、それ以外の時にはマップマッチング演算部13で演算した道路上の位置の中から最適現在位置を選択する。その選択した現在位置を道路上現在位置確定出力部36からモニタに現在位置表示を行うため出力する。
【0047】
前記のような機能ブロックからなる本発明においては、例えば図2〜図4に示す作動フローにより実施することができる。図2には本発明の自車位置選択処理を行う全体の作動フローを示し、同図に示す自車位置選択処理においては、最初図3に示すような、本発明の主要部の作動を行うための従来から行われている、現在位置取得定常処理を行う(ステップS1)。即ち図3に示す現在位置取得定常処理においては、最初前回の自立航法位置から50ms等の第1所定時間が経過したか否かを判別する(ステップS11)。ここで未だ第1所定時間が経過していないと判別したときには、再びステップS11の作動を繰り返して、第1所定時間が経過するまで待機する。
【0048】
ステップS11で第1所定時間が経過したと判別したときには、自立航法により自車位置を決定する(ステップS12)。この処理は図1の現在位置演算部5における自立航法現在位置演算部7が、第1所定時間経過検出部6において50ms等の第1所定時間が経過したことを検出したとき、自立航法データ入力部1の走行距離計測部2と走行方位計測部3のデータによって、前回決定した自車位置からの距離と方位に基づいて新たな自車位置を決定することによって行われる。
【0049】
その後、前回のマップマッチングから500ms等の第2所定時間が経過したか否かを判別して(ステップS13)、未だ経過していないときには再びステップS11に戻って自立航法により自車位置を決定する作動を行いながら第2所定時間が経過するまで待機する。ステップS13で前回のマップマッチングから第2所定時間が経過したと判別したときには、マップマッチングにより道路上の位置候補を検出する(ステップS14)。この作動は図1のマップマッチング演算部13におけるマップマッチング候補検出部15が、第2所定時間経過検出部14で、500ms等の所定時間が経過したことを検出したとき、自立航法利用マップマッチング候補検出部16で、マップマッチングによる道路上の位置候補を検出することにより行う。
【0050】
次いで自立航法位置とマップマッチング位置は所定距離以上離れているか否かを判別する(ステップS15)。ここで自立航法位置とマップマッチング位置が例えば100m等の所定距離以上離れていると判別したときには、GPS航法は適正に作動可能な状態か否かを判別し(ステップS16)、適正に作動可能な状態にあると判別したときにはGPS航法によって現在位置を演算する(ステップS17)。その後GPS航法による現在位置を用いてマップマッチングにより道路上の位置候補を検出する(ステップS18)。
【0051】
この作動は図1のマップマッチング候補検出部15におけるGPS航法利用判別部17において、自立航法利用マップマッチング候補検出部16で例えば自立航法位置から100m等の所定距離以内にマッチングする道路が存在しないことを検出したときにGPS航法を利用するものと判別し、GPS航法現在位置演算部9で演算した現在位置に基づいてマップマッチングを行い、マップマッチング演算部13のGPS航法利用マップマッチング候補検出部18が、候補となる道路を検出する事により行う。
【0052】
図3の例においては、その後前記ステップS15において自立航法位置とマップマッチング位置は所定距離以上離れていない、即ち所定距離以内であると判別したとき、及びステップS16でGPS航法は適正に作動可能な状態になっていないと判別したときと共にステップS19において図2のステップS2に進む。
【0053】
図2のステップS2においては、ステップS1で前記図3に示す作動を行った後、誘導経路に沿って走行しているか否かを判別する。ここで誘導経路を走行していると判別したときには、道路上の位置候補には誘導経路上の位置候補が存在するか否かを判別する(ステップS3)。ここで誘導経路に沿って走行していると判別したときには、道路上の位置候補には誘導経路上に位置候補が存在するか否かを判別する(ステップS3)。ここではステップS1において前記のように自立航法或いはGPS航法で得られた自車位置について周囲の道路にマップマッチングを行うとき、マップマッチングを行う条件の道路を検出した際、その道路の中に誘導経路となっている道路が存在するか否かを判別する。
【0054】
ステップS3において、道路上の位置候補には誘導経路上の位置候補が存在すると判別したときには、誘導経路上の道路位置候補を優先取得する(ステップS7)。その後自立航法位置と道路上位置について、前回投影法マップマッチング時からの移動ベクトルを求める(ステップS5)。なお、ここでは自立航法位置として示しているが、前記のように自立航法を継続することにより誤差が大きくなったとき、GPS航法を利用して自立航法の位置に代える作動を行ったときには、その位置を用いることとなる。
【0055】
次いで図4に示すような、自立航法位置と道路上位置の両ベクトルの比較処理を行う(ステップS6)。図4に示す自立航法位置と道路上位置の両ベクトルの比較処理の例においては、最初前記図6(a)に示すような、両移動ベクトル端間の距離を比較する処理を行うか否かを判別し(ステップS21)、ここでこのような処理を行わないと判別したときには図6(b)のような、両移動ベクトル間の角度を求めるか否かを判別する(ステップS25)。ここでこのような処理を行わないと判別したときには、図6(c)のような、両移動ベクトルの長さを比較するか否かの判別をしている(ステップS27)。したがって、図4に示す例においては、図1の両移動ベクトル比較処理部24における比較要素選択部25で予め決めている処理を、前記作動フローのいずれかで処理することにより実行することができる。但し、それらの判別の順序、処理の順序は問わない。
【0056】
図4に示す例においては、ステップS21において両移動ベクトル端間の距離を比較すると判別したときには、両移動ベクトル端間の距離自体の比較演算をするか否かを判別している(ステップS22)。ここで両移動ベクトル端間の距離自体の比較演算を行うと判別したときにはステップS23において、両移動ベクトル端間の距離を演算する。ここで演算した両移動ベクトル端間の距離は、その後図2のステップS7において、しきい値を超えたか否かの判別が行われ、例えば地図上での距離が15mを超えたか否かを判別し、このしきい値を超えないときだけステップS8において経路優先位置を現在位置とする処理がなされる。
【0057】
図4のステップS22において両移動ベクトル端間の距離自体の比較演算を行わないと判別したときには、両移動ベクトル端間の距離比率を演算する(ステップS24)。ここで距離比率を演算したときには、その後図2のステップS7でしきい値と比較する場合には、例えば自立航法位置移動ベクトルの長さ対、両移動ベクトル端間の距離が、1対2に設定する、等の設定値との比較を行う。
【0058】
図6(a)に示すように両移動ベクトル端間の距離を比較する手法として、予め両移動ベクトル端間の距離自体を演算する場合と、両移動ベクトル端間距離の自立航法位置移動ベクトル長さに対する割合を演算する場合とが存在し、ステップS22ではいずれかを選択するようにしている。しかしながら、両移動ベクトル端間の距離自体を演算した値と、両移動ベクトル端間の距離比率を演算した値の両方の値で、経路優先位置を採用するか否かを検討する場合が存在するときには、図4のステップS23の後に両移動ベクトル端間の距離比率を演算するか否かの判別を用意し、ステップS22で両移動ベクトル端間の距離自体の比較演算を行わないと判別したとき、及びステップS23で両移動ベクトル端間の距離を演算した後と共に、前記両移動ベクトル端間の距離比率を演算するか否かの判別を行うようにし、その距離比率の演算を行うと判別したときには、続く処理で両移動ベクトルの端間の距離比率を演算し、その距離比率の演算を行わないと判別したときには前記演算処理を行ったときと共に図4のステップS25に進むように変更することによって実施することができる。
【0059】
図4に示す例においてはステップS21で両移動ベクトル端間の距離を比較しないと判別したとき、及びステップS23並びにステップS24の各処理を行ったときにはステップS25に進み、両移動ベクトル間の角度を求めるか否かの判別を行う。ここで両移動ベクトル間の角度を求めると判別したときには、図6(b)のように自立航法位置移動ベクトルVJと、誘導経路上位置移動ベクトルVU間の角度を測定する(ステップS26)。その後図2のステップS7でしきい値と比較する際には、例えば45度等の所定の角度と比較する。
【0060】
次いで前記ステップS25において両移動ベクトル間の角度を求めないと判別したときと共にステップS27に進み、両移動ベクトルの長さを比較するか否かを判別する。ここで両移動ベクトルの長さを比較すると判別したときには、ステップS29において両移動ベクトルの長さの差を演算する。ここで両移動ベクトルの長さの差を求めたときには、図2のステップS7でしきい値と比較する際は、例えば地図上で15m等の所定の値と比較することとなる。
【0061】
ステップS28で両移動ベクトルの長さ自体の比較演算を行わないと判別したときには、両移動ベクトルの長さの比率の比較値を演算する(ステップS30)。ここで両移動ベクトルの長さの比率を求めたときには、図2のステップS7でしきい値と比較する際は、例えば自立航法位置移動ベクトル長さ対誘導経路上位置移動ベクトルの長さが、2対3以上であるか否か等の判別を行う。
【0062】
その後図4の例においては、ステップS27で両移動ベクトルの長さを比較する処理を行わないと判別したときと共に、複数の比較要素の値を求めるか否かの判別を行っている。即ち図4の例においては前記のような各種の両ベクトルの比較処理を任意に選択して行うことができるようにすると共に、例えばステップS23で両移動ベクトル端間の距離を演算する処理と、ステップS26で両移動ベクトル間の角度を測定する処理を行ったとき、それらの複数の比較要素を総合的に演算することができるようにしている。
【0063】
それにより例えば前記の例では、ステップS23で両移動ベクトル端間の距離を演算したとき地図上距離で13mであり、ステップS26で両移動ベクトル間の角度を測定したとき40度であった場合、それぞれの値を指数化すると共に各々に重み付けの係数を掛けた値を演算する、等の処理を行う。ここで得られた値についても、図2のステップS7で予め設定したしきい値と比較して、誘導経路優先処理を行うか否かの判別に利用する。
【0064】
ステップS32の処理の後は、前記ステップS31で複数の比較要素の値を求めなかった、即ち各種比較要素の内1つだけを選択したときと共にステップS33において図2のステップS7に進む。ステップS7では前記図4のステップS23、S24、S26、S29、S30、及びS32で演算や測定をした値と、予めこれらに対応して設定したしきい値との比較を行い、しきい値を超えていないか、即ち誘導経路優先の処理を行っても良い条件の範囲であるか否かを判別する。ここで選択した比較要素の値がしきい値を超えてはいないと判別したときには、誘導経路優先位置を現在位置とする(ステップS8)。それに対してステップS7で選択した比較要素の値はしきい値を超えたと判別したとき、及びステップS2で誘導経路に沿って走行していないと判別したとき、並びにステップS3で道路上の位置候補には誘導経路上の位置候補が存在しないと判別したときと共に、ステップS9において最適な道路上の位置候補を現在位置とする。
【0065】
上記のような処理を行う結果、従来は図8(a)に示すように自立航法位置J5において、誘導経路Uの道路R3上のマッチング位置M2に自車位置を表示し、その後の走行により道路R3上の目的地に直ちに到達してしまったとき、同図(b)のように、間違った到着判定により自立航法位置J7でのマッチング位置M4以降の経路案内を停止してしまい、目的地表示もなくなってしまうことによってその後の走行が困難になる問題を、図7に示すような処理を行うことによって解決する。
【0066】
即ち、図7(a)には自立航法位置移動ベクトルVJと誘導経路上位置移動ベクトルVUについて、図6(a)に示す態様により、両移動ベクトルの端間距離を比較する例を示しており、この比較によって例えば両移動ベクトルの端間距離が、地図上で20mであり、予め設定したしきい値である15mを超えていたとき、誘導経路優先の処理を行うことは適切ではないと判別する。その結果自立航法位置J5において道路R1に対するマッチング位置M2’が誘導経路優先を行わない最適な道路上の位置候補であるとして自車位置をここに表示する。
【0067】
その後は図7(b)に示すように誘導経路Uが消去されると共に、自車位置J4において道路R1にマップマッチングを行い、マッチング位置M3’に自車位置を表示する。また、この過程で目的地に対する新たな誘導経路を再探索し、交差点C3で分岐する道路R4を通り、道路R3を通って目的地に至る誘導経路U’を表示する。それにより以降はこの再探索された誘導経路U’にしたがった案内が行われ、容易に目的地に到達することができ、図8(b)に示す従来の問題点を解消することができる。
【符号の説明】
【0068】
1 自立航法データ入力部
2 走行距離計測部
3 走行方位計測部
4 GPSデータ取込部
5 現在位置演算部
6 第1所定時間経過検出部
7 自立航法現在位置演算部
8 GPS航法適正作動検出部
9 GPS航法現在位置演算部
10 地図データ入力部
11 誘導経路入力部
12 自車位置選択部
13 マップマッチング演算部
14 第2所定時間経過検出部
15 マップマッチング候補検出部
16 自立航法利用マップマッチング候補検出部
17 GPS航法利用判別部
18 GPS航法利用マップマッチング候補検出部
21 誘導経路上位置適否判別部
22 自立航法位置移動ベクトル形成部
23 誘導経路上位置移動ベクトル形成部
24 両移動ベクトル比較処理部
25 比較要素選択部
26 両移動ベクトル端間距離比較部
27 距離自体比較部
28 距離比率比較部
29 両移動ベクトル角度比較部
30 両移動ベクトル長さ比較部
31 長さの差比較部
32 長さ比率比較部
33 しきい値設定部
34 複数比較要素総合演算部
35 最適現在位置選択部
36 道路上現在位置確定出力部
【特許請求の範囲】
【請求項1】
自立航法により第1自立航法位置を演算し、当該第1自立航法位置を誘導経路を優先して近くの道路に投影し第1マッチング位置を求め、
所定時間経過後に同様にして第2自立航法位置と第2マッチング位置を求め、
前記第2マッチング位置が誘導経路上であるとき、前記第1自立航法位置を基点として前記第2自立航法位置を先端とする自立航法位置移動ベクトルと、前記第1マッチング位置を基点として前記第2マッチング位置を先端とする誘導経路上位置移動ベクトルとを求め、
前記自立航法位置移動ベクトルと前記誘導経路上位置移動ベクトルとを比較して比較値を求め、
当該比較値が予め設定したしきい値を超えるときには前記第2マッピング位置を現在位置としては選択しないことを特徴とする自車位置選択方法。
【請求項2】
前記自立航法位置移動ベクトルと誘導経路上位置移動ベクトルとの比較値は、両移動ベクトルの先端間の長さ自体であることを特徴とする請求項1記載の自車位置選択方法。
【請求項3】
前記自立航法位置移動ベクトルと誘導経路上位置移動ベクトルとの比較値は、両移動ベクトルの端間の長さと前記自立航法位置移動ベクトルの長さの比率であることを特徴とする請求項1記載の自車位置選択方法。
【請求項4】
前記自立航法位置移動ベクトルと誘導経路上位置移動ベクトルとの比較値は、両移動ベクトルのなす角度であることを特徴とする請求項1記載の自車位置選択方法。
【請求項5】
前記自立航法位置移動ベクトルと誘導経路上位置移動ベクトルとの比較値は、両移動ベクトルの長さの差であることを特徴とする請求項1記載の自車位置選択方法。
【請求項6】
前記自立航法位置移動ベクトルと誘導経路上位置移動ベクトルとの比較値は、両移動ベクトルの長さの比率であることを特徴とする請求項1記載の自車位置選択方法。
【請求項7】
自立航法により現在位置を演算する自立航法現在位置演算部と、
前記自立航法位置演算部で演算した自立航法位置を、近くの道路に投影して道路上の現在位置を演算するマップマッチング演算部と、
前記マップマッチング演算部で投影する道路が誘導経路であるとき、前記マップマッチングが適切であるか否かを判別する誘導経路上位置適否判別部とを備え、
前記誘導経路上位値適否判別部には、前記自立航法現在位置演算部で演算した第1自立航法位置を基点とし、前記第1自立航法演算後の所定時間経過後に同様にして演算した第2自立航法位置を先端とする自立航法位置移動ベクトルを形成する自立航法位置移動ベクトル形成部と、
前記マップマッチング演算部で演算した前記第1自立航法位置のマッチング位置を基点とし、前記第2自立航法位置の誘導経路へのマッチング位置を先端とする誘導経路上位置移動ベクトルを形成する誘導経路位置移動ベクトル形成部と、
前記自立航法位置移動ベクトルと前記誘導経路上位置移動ベクトルとを比較した値と、予め設定したしきい値とを比較する両移動ベクトル比較処理部とを備え、
前記両移動ベクトル比較処理部の処理で、前記比較値がしきい値を超えたとき、前記第2自立航法位置の誘導経路へのマッチング位置を採用しない現在位置選択部を備えたことを特徴とする自車位置選択装置。
【請求項1】
自立航法により第1自立航法位置を演算し、当該第1自立航法位置を誘導経路を優先して近くの道路に投影し第1マッチング位置を求め、
所定時間経過後に同様にして第2自立航法位置と第2マッチング位置を求め、
前記第2マッチング位置が誘導経路上であるとき、前記第1自立航法位置を基点として前記第2自立航法位置を先端とする自立航法位置移動ベクトルと、前記第1マッチング位置を基点として前記第2マッチング位置を先端とする誘導経路上位置移動ベクトルとを求め、
前記自立航法位置移動ベクトルと前記誘導経路上位置移動ベクトルとを比較して比較値を求め、
当該比較値が予め設定したしきい値を超えるときには前記第2マッピング位置を現在位置としては選択しないことを特徴とする自車位置選択方法。
【請求項2】
前記自立航法位置移動ベクトルと誘導経路上位置移動ベクトルとの比較値は、両移動ベクトルの先端間の長さ自体であることを特徴とする請求項1記載の自車位置選択方法。
【請求項3】
前記自立航法位置移動ベクトルと誘導経路上位置移動ベクトルとの比較値は、両移動ベクトルの端間の長さと前記自立航法位置移動ベクトルの長さの比率であることを特徴とする請求項1記載の自車位置選択方法。
【請求項4】
前記自立航法位置移動ベクトルと誘導経路上位置移動ベクトルとの比較値は、両移動ベクトルのなす角度であることを特徴とする請求項1記載の自車位置選択方法。
【請求項5】
前記自立航法位置移動ベクトルと誘導経路上位置移動ベクトルとの比較値は、両移動ベクトルの長さの差であることを特徴とする請求項1記載の自車位置選択方法。
【請求項6】
前記自立航法位置移動ベクトルと誘導経路上位置移動ベクトルとの比較値は、両移動ベクトルの長さの比率であることを特徴とする請求項1記載の自車位置選択方法。
【請求項7】
自立航法により現在位置を演算する自立航法現在位置演算部と、
前記自立航法位置演算部で演算した自立航法位置を、近くの道路に投影して道路上の現在位置を演算するマップマッチング演算部と、
前記マップマッチング演算部で投影する道路が誘導経路であるとき、前記マップマッチングが適切であるか否かを判別する誘導経路上位置適否判別部とを備え、
前記誘導経路上位値適否判別部には、前記自立航法現在位置演算部で演算した第1自立航法位置を基点とし、前記第1自立航法演算後の所定時間経過後に同様にして演算した第2自立航法位置を先端とする自立航法位置移動ベクトルを形成する自立航法位置移動ベクトル形成部と、
前記マップマッチング演算部で演算した前記第1自立航法位置のマッチング位置を基点とし、前記第2自立航法位置の誘導経路へのマッチング位置を先端とする誘導経路上位置移動ベクトルを形成する誘導経路位置移動ベクトル形成部と、
前記自立航法位置移動ベクトルと前記誘導経路上位置移動ベクトルとを比較した値と、予め設定したしきい値とを比較する両移動ベクトル比較処理部とを備え、
前記両移動ベクトル比較処理部の処理で、前記比較値がしきい値を超えたとき、前記第2自立航法位置の誘導経路へのマッチング位置を採用しない現在位置選択部を備えたことを特徴とする自車位置選択装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−17556(P2011−17556A)
【公開日】平成23年1月27日(2011.1.27)
【国際特許分類】
【出願番号】特願2009−160802(P2009−160802)
【出願日】平成21年7月7日(2009.7.7)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成23年1月27日(2011.1.27)
【国際特許分類】
【出願日】平成21年7月7日(2009.7.7)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]