
自転車

【課題】自転車の構造を変化させることなく、自転車のハンドル操作性を制御することができる自転車を提供する。
【解決手段】自転車1は、フレーム固定部に対して回動する前輪30と前輪30に連結されたハンドルレバー10との回動軸55a、回動軸55bに対して回動力を付与するためにフレーム固定部に配される負荷装置50と、負荷装置50が発生する回動力の大きさを求め、負荷装置50が、この求めた回動力を発生するように制御する演算制御部42と、を備える。
【解決手段】自転車1は、フレーム固定部に対して回動する前輪30と前輪30に連結されたハンドルレバー10との回動軸55a、回動軸55bに対して回動力を付与するためにフレーム固定部に配される負荷装置50と、負荷装置50が発生する回動力の大きさを求め、負荷装置50が、この求めた回動力を発生するように制御する演算制御部42と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自転車に関し、特に、自転車のハンドル操作性を制御する機能を有する自転車に関するものである。
【背景技術】
【0002】
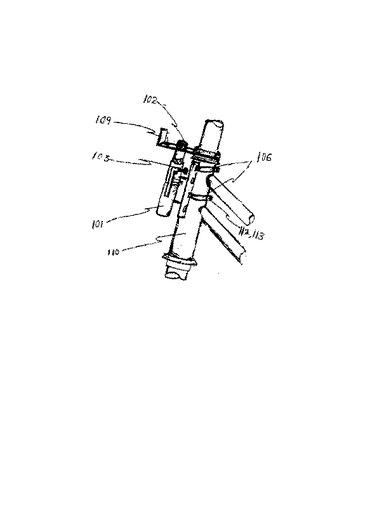
図13は、駐停車時において、ハンドルの自由回動を阻止するための自転車のハンドルストッパー装置を示す図である(特許文献1を参照)。ハンドルストッパー装置本体101にスライド軸102がセットされたハンドルストッパー装置を自転車フレーム110に固定バンド106、ボルト112、ナット113を用いて取り付けるようにしている。スライド軸102のスライドノブ103を上昇させて、荷物カゴ取り付け用ブラケット109の切欠け穴に挿入することで連結固定するようにしている。
【0003】
図14は、荷物用の籠(またはチャイルドシート)216が固着されるハンドル212の回動規制装置を示す図である(特許文献2を参照)。ハンドル212の回転中心に備えられたステアリング軸213が車体フレーム前端のヘッドパイプ211に回転自在に装着され、ステアリング軸213の軸上に荷物用の籠または子供を乗せるためのチャイルドシート216が取付可能なハンドル212を備える。籠またはチャイルドシート216の下方の可動部と、車体フレーム201との間に、ハンドル212の切れ込みを規制し、ハンドル212を中立方向に戻すためのばね部材226を備えている。このようにしてハンドルが大きく切れ込むことを防いでいる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】実用新案登録第3140016号公報
【特許文献2】特開2000−159175号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1には、自転車の駐停車時において、ハンドルの自由回動を阻止する技術が開示されている。特許文献2には、ばね部材226を設けて、走行時にハンドルが大きく切れ込むことを防止する技術が開示されている。しかしながら、特許文献1に記載の技術と特許文献2に記載の技術を組み合わせて、駐停車時において、ハンドルの自由回動を阻止し、走行時に大きく切れ込むことを防止するようにすると、構造が複雑になってしまう。また、走行時における切れ込み特性を、自転車の走行速度、荷物籠またはチャイルドシートに積載する物または子供の重量に応じて変化させることはできない。すなわち、従来技術では、走行条件、積載条件に応じて自転車のハンドル操作性を制御することができない。
【0006】
本発明は、上述した課題を解決して、自転車の構造を変化させることなく、自転車のハンドル操作性を制御することができる自転車を提供するものである。
【課題を解決するための手段】
【0007】
本発明の自転車は、フレーム固定部に対して回動する前輪と該前輪に連結されたハンドルレバーとの回動軸に対して回動力を付与するために該フレーム固定部に配される負荷装置と、前記負荷装置が発生する所望回動力の大きさを求め、該負荷装置が該所望回動力を発生するように制御する演算制御部と、を備える。
【0008】
本発明の自転車では、負荷装置とこの負荷装置を制御する演算制御部とを備え、ハンドルレバーに回動力を付与することができる。
【発明の効果】
【0009】
本発明の自転車によれば、負荷装置を制御して、ハンドル操作性を制御することができる。
【図面の簡単な説明】
【0010】
【図1】実施形態の自転車を示す図である。
【図2】図1に示す自転車のA−A’線を含む面の断面図である。
【図3】図1に示す自転車のC−C’線(ハンドル回動軸)を含む面の断面図である。
【図4】図1に示す自転車の負荷装置のB−B’線を含む面の断面図である。である。
【図5】自転車の負荷装置の動作原理を示す図である。
【図6】自転車の制御系の構成を示す図である。
【図7】制御系における処理のフローチャートである。
【図8】ハンドルロック制御処理のフローチャートである。
【図9】走行速度に応じたハンドル回動角速度制御処理・ハンドル回動量制限処理のフローチャートである。
【図10】積載重量に応じたハンドル回動角速度制御処理・ハンドル回動量制限処理のフローチャートである。
【図11】ハンドル操作圧を一定とする制御処理のフローチャートである。
【図12】積載物の重心位置に応じたハンドル回動制限処理のフローチャートである。
【図13】背景技術を示す図である。
【図14】背景技術を示す図である。
【発明を実施するための最良の形態】
【0011】
実施形態の自転車は、フレーム固定部に対して回動する前輪と前輪に連結されたハンドルレバーとの回動軸に対して回動力を付与するためにフレーム固定部に固着される負荷装置と、負荷装置が発生する回動力の大きさを求め、負荷装置が回動力を発生するように制御する演算制御部と、を備える自転車である。以下、図面を参照して、具体的な実施形態について説明をする。
【0012】
(実施形態の自転車の構造の説明)
図1は、実施形態の自転車を示す図である。図2は、図1に示す自転車のA−A’線を含む面の断面図である。図3は、図1に示す自転車のC−C’線(ハンドル回動軸)を含む面の断面図である。図4は、図1に示す自転車の負荷装置のB−B’線を含む面の断面図である。以下、図1〜図4に沿って順に実施形態の自転車の構造の説明をする。
【0013】
図1に示す自転車1は電動アシスト自転車である。電動アシスト自転車は、電池を動力源として走行力の一部を電動モータから得るものである。電動アシストの技術は周知の技術であるので説明を省略する。実施形態の自転車について、必要な範囲でその構造を簡単に説明する。
【0014】
自転車1は、一般的な自転車が通常備えると同様な、前輪30、後輪31を有している。また、ダウンチューブ27とシートチューブ28とシートスティブリッジ34とチェンスティ35とでフレーム固定部を形成している。ダウンチューブ27の先端には、負荷装置50が備えられている。負荷装置50については詳細に後述するが、負荷装置50は誘導電動機として構成されている。負荷装置50の内部で回動する回転子(図3の符号54を参照)に連結される回動軸55の一方の端部である回動軸55aと他方の端部である回動軸55bとが負荷装置50の外部に伸びている。図1に示す一点鎖線は回動軸55の回動中心を示すものである。
【0015】
回動軸55bにはカップリング装置24を介して前輪30を支持するフォークブレード26が連結されている。また、回動軸55aにはカップリング装置22を介してステム回動軸21が連結されている。ステム回動軸21はステム20と固着され、ステム回動軸21と固着されるステム20の底部は平板状となっている。また、ステム20の上部はハンドルレバー10を支持するようにされている。
【0016】
ステム20の底部には、荷物籠取付板17が固着されている。荷物籠取付板17は荷物を積載するための荷物籠15の底面を水平にするために設けられている。荷物籠15と荷物籠取付板17との間には、荷物籠15に積載する荷物の重量を検出するための積載量測定装置16が備えられている。積載量測定装置16は、磁歪センサ、ストレインゲージ等の通常用いられる圧力検出装置であり重量が電圧量に変換して検出される。
【0017】
フォークブレード26の先端部に前輪30が支持され、ハンドルレバー10の操作によって、フレーム固定部に対して前輪30を一点鎖線で示す回動軸を中心として回動させて、自転車の進行方向を制御できるようにされている。
【0018】
シートチューブ28とシートスティブリッジ34とチェンスティ35とで形成される三角形の先端部分に後輪31が支持されている。後輪31の回転中心部にはスプロケット38が配置され、チェンスティ35に沿って配置されるチェン37がスプロケット38に駆動力を伝達して、後輪31を回転させる。チェン37に駆動力を与えるためにペダル33と電動モータ部36とが配置され、ペダルからの駆動力に加えて、電動モータ部36に格納される電動モータ(図示せず)からの駆動力が後輪31の回転力として合成され、ペダルからの駆動力をアシストするようになされている。
【0019】
シートチューブ28とシートスティブリッジ34とチェンスティ35とで形成される三角形の別の先端部分から、シートチューブ28の長手方向に伸びるポストの先にサドル29が配されている。
【0020】
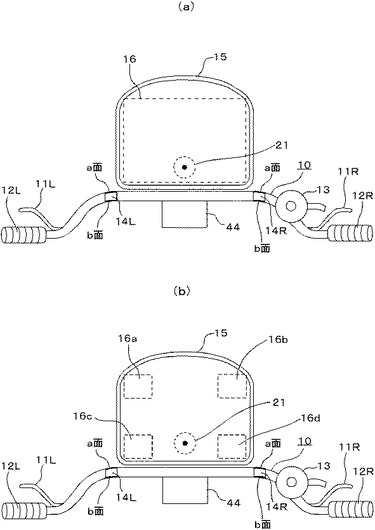
図1に示す自転車1のA−A’線を含む面の断面図である、図2に沿って説明をする。図2(a)と図2(b)とでは、積載量測定装置の構成が異なっている。図2(a)では、ストレインゲージ、磁歪センサ等を利用した1個の積載量測定装置16を用いて荷物籠15に積載される荷物の総重量を測定するようになされている。一方、図2(b)では、積載量測定装置は、積載量測定装置16aと積載量測定装置16bと積載量測定装置16cと積載量測定装置16dとの4個の積載量測定装置を備えている。
【0021】
積載量測定装置16aからの検出信号と積載量測定装置16bからの検出信号との和の検出信号は荷物籠15の前方向(進行方向)に加重される重量である前方向荷重を表し、積載量測定装置16cからの検出信号と積載量測定装置16dからの検出信号との和の検出信号は荷物籠15の後方向に加重される重量である後方向荷重を表す。また、積載量測定装置16bからの検出信号と積載量測定装置16dからの検出信号との和の検出信号は荷物籠15の右方向(進行方向に向かって右の方向)に加重される重量である右方向荷重を表す。また、積載量測定装置16aからの検出信号と積載量測定装置16cからの検出信号との和の検出信号は荷物籠15の左方向に加重される重量である左方向荷重を表す。
【0022】
前方向荷重から後方向荷重を引き算した演算結果は、積載物の荷物籠15における前後の重心位置を表し、演算結果が0であれば、荷物籠15の前後方向の中心位置に積載物が配置されていることを表す。演算結果が正値であれば、荷物籠15の中心位置から前方に重心位置が移動して積載物が配置されていることを表す。演算結果が負値であれば、荷物籠15の中心位置から後方に重心位置が移動して積載物が配置されていることを表す。
【0023】
また、右方向荷重から左方向荷重を引き算した演算結果は、積載物の荷物籠15における左右の重心位置を表し、演算結果が0であれば、荷物籠15の左右方向の中心位置に積載物が配置されていることを表す。演算結果が正値であれば、荷物籠15の中心位置から右に重心位置が移動して積載物が配置されていることを表す。演算結果が負値であれば、荷物籠15の中心位置から左に重心位置が移動して積載物が配置されていることを表す。積載量測定装置16、または、積載量測定装置16a〜積載量測定装置16dがどのように用いられるかについては後述する。
【0024】
ハンドルレバー10の両方の先端には、左グリップ12L、右グリップ12Rが配され、ハンドルレバー10の回動が容易にできるようにされている。ハンドルレバー10の回動の中心は、ステム回動軸21の回動の中心と一致している。左ブレーキレバー11L、右ブレーキレバー11Rによって自転車1の速度を減速し、ベル13は警告音を発することができる。
【0025】
左ハンドル操作圧検出器14Lは、ハンドルレバー10のa面とb面とに各々ストレインゲージを貼り付けて構成されている(図2を参照)。ハンドルレバー10は金属等を材料とするが、左グリップ12Lに加えられる回動力に応じて、a面とb面との各々は、一方が伸びると他方は縮むので、a面のストレインゲージの出力とb面のストレインゲージの出力との差から、左グリップ12Lが与える回動力の大きさを検出することができる。
【0026】
同様にして、右ハンドル操作圧検出器14Rは、ハンドルレバー10のa面とb面とに各々ストレインゲージを貼り付けて構成されている(図2を参照)。右グリップ12Rに加えられる回動力に応じて、a面とb面との各々は、一方が伸びると他方は縮むので、a面のストレインゲージの出力とb面のストレインゲージの出力との差から、右グリップ12Rが与える回動力の大きさを検出することができる。
【0027】
ハンドルレバー10には手動入力装置44が取り付けられている。手動入力装置44がどのように用いられるかについては後述する。なお、荷物籠15に替えてチャイルドシートを用いる場合においても同様な積載量測定装置16、または、積載量測定装置16a〜積載量測定装置16dを用いて子供の体重を測定することができる。
【0028】
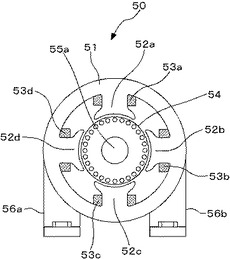
図1に示す自転車のC−C’線(ハンドル回動軸)を含む面であって紙面と平行する面の断面図である、図3に沿って説明をする。図3は、負荷装置50を中心に示す図である。負荷装置50は固定部と回転子54とを有している。固定部は、磁気枠部51と、磁気鉄心52a、磁気鉄心52b、磁気鉄心52c、磁気鉄心52d(磁気鉄心52b、磁気鉄心52dは図4を参照)とを有している。また、磁気鉄心52a〜磁気鉄心52dの各々には、巻線53a〜巻線53d(巻線53b、巻線53dは図4を参照)が巻回されている。
【0029】
回転子54の中心には、負荷装置50の外部に突出した回動軸55aと回動軸55bとをその一部として有する回動軸55が連結されている。回転子54は、回動軸55の伸びる方向の両端には短絡環を有し、両方の短絡環は二次導体で連結されている。負荷装置50は、このような固定部と回転子54とを有して、周知技術である誘導電動機として機能する。
【0030】
つまり、巻線53a〜巻線53dに流れる電流によって生じる回転磁界の方向が右回りである場合には回転子54に右回りの回転力を発生させ、巻線53a〜巻線53dに流れる電流によって生じる回転磁界の方向が左回りである場合には回転子54に左回りの回転力を発生させる。そして、ハンドルレバー10を右方向に手動で回動させる場合において回転子54に右回りの回転力を発生させる場合には手動による回動力をアシストし、ハンドルレバー10を右方向に手動で回動させる場合において回転子54に左回りの回転力を発生させる場合には手動による回動力を減殺する。また、ハンドルレバー10を左方向に手動で回動させる場合において回転子54に左回りの回転力を発生させる場合には手動による回動力をアシストし、ハンドルレバー10を左方向に手動で回動させる場合において回転子54に右回りの回転力を発生させる場合には手動による回動力を減殺する。
【0031】
また、負荷装置50は回動角度測定装置58を有している。回動角度測定装置58は回動軸55とともに回動する回動角度測定装置回動部58bと固定部である磁気枠部51に固着された回動角度測定装置固定部58aとを有している。回動角度測定装置58は、周知技術であり、磁気方式、光学方式等の種々の周知技術に基づくものとすることができる。回転子54、すなわち、回動軸55の回動角度は、回動角度測定装置固定部58aから電気信号として検出することができる。
【0032】
回動軸55aはカップリング装置22に挿入されてビス23bによって係止され、ステム回動軸21はカップリング装置22に挿入されてビス23aによって係止されている。また、回動軸55bはカップリング装置24に挿入されてビス25aによって係止され、フォークブレード26はカップリング装置24に挿入されてビス25bによって係止されている。また、磁気枠部51には、取付部56aと取付部56b(図4を参照)とが一体成型されており、取付部56aと取付部56bとの各々がボルトとナットとでダウンチューブ27と連結されている。
【0033】
図1、図3に示す負荷装置50のB−B’線を含む面の断面図である、図4に沿って誘導電動機である負荷装置50の構造をさらに説明する。図4に付した符号が示す各部は、図3に示す同一符号を付した部分と同一部分を指し示すのでその説明は省略する。巻線53a〜巻線53dに流れる電流を制御することによって、磁気鉄心52a〜磁気鉄心52dに回転磁界を発生させ、回転子54の二次導体に流れる電流との相互作用で回転子54に回転力を得ることができる。
【0034】
(実施形態の負荷装置の制御系の説明)
図5を参照して、負荷装置50の動作原理を説明する。負荷装置50の巻線53a〜巻線53dの各々は巻線駆動部41の4個のドライバーの各々に接続されている。巻線駆動部41に対しては、演算制御部42から巻線制御信号Sdが送出される。演算制御部42は、回動角度測定装置固定部58aから回動軸55の回動角度を得て、演算制御部42の内部で演算して巻線制御信号Sdを発生させる。
【0035】
ここで、演算制御部42でおこなう演算は、誘導電動機の制御技術に基づく演算である。例えば、一次電圧制御の演算、または、周波数制御の演算、または、V/f一定制御の演算、さらに、瞬時の応答を良くするために、ベクトル制御の演算のいずれかである。以上の制御の方法はいずれも周知の技術である。このようにして、各種の演算によって回動軸55に発生するトルク、すなわち、ハンドルレバー10を通じてハンドルを介して自転車を操作する者が感知するトルクの大きさの制御をおこなうことができ、ハンドル操作性を所望のものとすることができる。
【0036】
(実施形態の自転車の全体の制御系の説明)
演算制御部42は、上述したように負荷装置50を制御する制御系の一部として機能するのみならず、各種の制御機能を有する。
【0037】
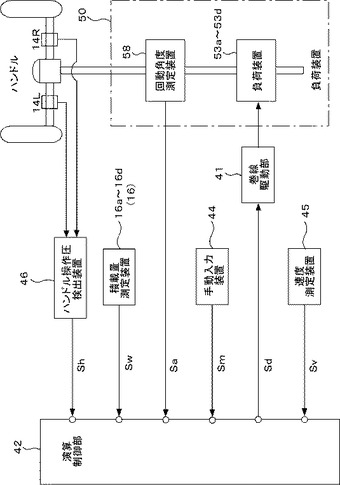
図6は、自転車の制御系の構成を示す図である。図6を参照して制御系の説明をする。制御系においては、演算制御部42が中心となって制御をおこなう。なお、実施形態では自転車1は電動アシスト自転車であるとして説明をしているので、電動アシストの機能も演算制御部42でおこなうが、電動アシストの技術は周知技術であるので、説明を省略する。アシストモータを備えない自転車、常時、電動モータで駆動力が与えられる電動二輪車においても、図6に示す実施形態の制御系は適用できるものである。
【0038】
演算制御部42は、いずれも図示しない、CPU(中央演算装置)、RAM(ラム)、書き換え可能な不揮発性メモリ、ROM(ロム)、I/Oインターフェイス回路(入出力インターフェイス回路)を有している。CPUのバスライン(アドレスバスライン・データバスライン)にはCPU、RAM(ラム)、ROM(ロム)、I/Oインターフェイス回路が接続されている。
【0039】
ROMはCPUで実行されるプログラムを記憶し、RAMはCPUでの演算データを一時記憶する。また、I/Oインターフェイス回路は外部回路とCPUとの間での信号の入出力のためのA/D変換器、D/A変換器等を有している。また、ROMには、負荷装置50の制御のためのルックアップテーブルが格納されている。不揮発性メモリには、記憶内容の書き換え後、電源を切断した後でも、記憶内容が保持される。
【0040】
ハンドル操作圧検出装置46は、ハンドルレバー10を回動するためのハンドル操作圧信号Shを検出する。ハンドル操作圧信号Shは、左グリップ12Lに加わる操作圧信号と右グリップ12Rに加わる操作圧信号との差分として求められる。そして、後述するハンドル操作圧を一定とする制御処理では、この差分信号が前輪30に連結される回動軸55を回動させる回動力を負荷装置50に発生させるのである。
【0041】
速度測定装置45は、チェン37の走行速度、または、後輪31の回転角速度から自転車の走行速度に応じた速度信号Svを求める。
【0042】
演算制御部42には、入力信号として、ハンドル操作圧検出装置46からのハンドル操作圧信号Shが入力される。また、積載量測定装置16、または、積載量測定装置16a〜積載量測定装置16dからの積載量信号Swが入力される。また、回動角度測定装置58の回動角度測定装置固定部58aからの回動角度信号Saが入力される。また、手動入力装置44からの手動入力信号Smが入力される。また、速度測定装置45からの速度信号Svが入力される。そして、上述したように、演算制御部42からは、巻線制御信号Sdが出力され、巻線制御信号Sdは巻線駆動部41に入力される。
【0043】
(実施形態における制御系の作用)
実施形態の自転車1は、図6に示すような制御系を有して、自転車1の回動軸55の動きを様々に制御することが可能となる。以下に実施例としていくつかの制御方法を述べる。
【0044】
図7は、自転車1の制御系におけるCPUがおこなう処理のフローチャートである。図7のフローチャートに沿って、演算制御部42のCPUがおこなう処理の内容を説明する。
【0045】
演算制御部42の電源が電源ON(オン)とされることによって、処理は開始する。
所定の周期毎にステップST10の処理が開始されるタイマー割込み処理とされている。
【0046】
ステップST11では、CPUは駐輪モードを選択するか否かを判断する。
駐輪モードとは自転車を走行させることなく、スタンドを立てて自転車を自立させるモードである。
駐輪モードであるか否かの判断は、CPUが手動入力装置44の駐輪ボタンが押されたことを検出して駐輪モードであると判断しても良く、また、所定時間、例えば、30秒間、速度測定装置45からの速度信号Svが速度0であることを示す場合に駐輪モードであると判断するようにしても良い。
ステップST11において、CPUが駐輪モードであると判断する場合(Yes)には処理はステップST12に移動し、CPUが駐輪モードであると判断しない場合(No)には処理はステップST13に移動する。
【0047】
ステップST12では、CPUはハンドルロック制御処理をおこなう。
ハンドルロック制御処理は、前輪30が直進方向(回動角度0度)に向くようにハンドルレバーを維持する処理である。ここで、回動角度0度であるということは、サドルの中心位置にある点(中心点)から左グリップ12Lまでの距離と、サドルの中心点から右グリップ12Rまでの距離とが等しくなった状態である。
ハンドルロック状態では、自転車の地面に対する射影面積が最小となり、複数台の自転車を並列に駐輪するには最も効率的である。また、重い荷物を荷物籠15に積載する場合には、重心位置の僅かなアンバランスで前輪30とハンドルレバー10が大きく回動する可能性が大きいが、ハンドルロック制御処理はこのような場合に回動角度0度に維持するものである。
ステップST12でおこなうハンドルロック制御処理の内容については後述する。
ステップST12での処理が完了すると処理はステップST10に移動する。
【0048】
ステップST13では、CPUは操作圧一定モードを選択するか否かを判断する。
操作圧一定モードとは自転車を走行中にハンドル操作をおこなう場合において、荷物籠15の荷物の重量が重い場合でも、荷物の重量が軽い場合と同様のハンドルレバー10の操作感を得ることができるようにするモードである。
駐輪モードであるか否かの判断は、CPUが、手動入力装置44によって操作圧一定モードとされたことを検出することによっておこなわれる。
ステップST13において、CPUが操作圧一定モードであると判断する場合(Yes)には処理はステップST17に移動し、CPUが操作圧一定モードであると判断しない場合(No)には処理はステップST14に移動する。
【0049】
ステップST17では、CPUは操作圧一定モード処理、すなわち、ハンドル操作圧を一定とする制御処理をおこなう。
ハンドル操作圧を一定とする制御処理の内容は後述する。
ステップST17での処理が完了すると処理はステップST10に移動する。
【0050】
ステップST14では、CPUは走行状況検出をおこなう。
CPUは、回動角度信号Saから現在のハンドル回動量(回動角度)を検出し、速度信号Svから現在の自転車の走行速度を検出し、積載量信号Swから荷物籠15に積載された荷物の現在の重量を検出する。
ステップST14での処理が完了すると処理はステップST15に移動する。
【0051】
ステップST15では、CPUは走行速度に応じたハンドル回動角速度制御処理・ハンドル回動量制限処理をおこなう。
ハンドル回動角速度制御処理と、ハンドル回動量制限処理とは、別個独立の2つの処理である。どちらか一方の処理をおこなった後に他方の処理をおこなうようにしても良く、また、選択的にどちらか一方の処理のみをおこなうようにしても良い。
【0052】
ステップST15での処理は、自転車の走行速度が遅いときに前輪30(ハンドルレバー10)に直線方向に進路を戻す復元力が働かないために操作が安定しないことに鑑みおこなわれる処理である。または、走行速度が速いときの急激(高回転角速度)なるハンドル操作、大(大きな回転角度)なるハンドル操作の危険性に鑑みて行われる処理である。例えば、負荷装置50を備えない自転車では、自転車の走行速度が遅いときには、前輪30(ハンドルレバー10)が小さな回動力(例えば、地面の凹凸によって生じる回動力、人がハンドルレバー10を操作することによる回動力、荷物籠15の荷物のアンバランスによる回動力)で簡単に回動してしまう(前輪の切れ込み)。このような急激な前輪30の切れ込みは、自転車の走行を不安定とする。一方、自転車が比較的高速で走行する場合には、ジャイロ作用によって前輪30の走行方向は安定しているので、急に切れ込みが生じることは少なくなるが、急激、大なるハンドル操作には危険性が伴う。
【0053】
負荷装置50を備える実施形態の自転車では、ステップST15において、ハンドル回動角速度制御処理をおこない、自転車の走行速度に応じて前輪30の動き易さを制御し、または、自転車の走行速度によらず一定の動き易さを得るようにしている。そして、急激な前輪30の切れ込みを防止して良好なる自転車の操作感が得られることとなる。
また、ステップST15において、自転車の走行速度に応じて、ハンドルの回動角度の量を制限するハンドル回動量制限処理をおこない、前輪30の回動角度の範囲を制限することによって、急激な前輪30の切れ込みを防止して良好なる自転車の操作感が得られることとなる。
ステップST15の処理の詳細な内容は後述する。
ステップST15の処理が完了すると処理はステップST16に移動する。
【0054】
ステップST16での処理は、荷物籠15に大きな荷物が積載されている場合において、特に、力が弱い女性、高齢者、低年齢者が自転車を操作する場合、荷物の重量によって、前輪30が急に切れ込む事態が生じることに鑑みおこなわれる処理である。例えば、負荷装置50を備えない自転車では、積載物の重量が重い場合に、積載物の重心位置の移動、路面の不安定によって、前輪30(ハンドルレバー10)が急速に回転する切れ込みが発生する。
【0055】
負荷装置50を備える実施形態の自転車では、ステップST16において、ハンドル回動角速度制御処理をおこない、荷物籠15の積載物の重量に応じて前輪30の回動角速度を制御し、または、積載物の重量よらず前輪30の回動角速度を一定として、急激な前輪30の切れ込みを防止して良好なる自転車の操作感が得られることとなる。
また、ステップST16において、積載物の重量に応じて回動角度の範囲を定めるハンドル回動量制限処理をおこない、前輪30(ハンドルレバー10)の回動範囲を制限して、積載物の重量に振られて前輪30が急激に切れ込むことがないようにする。
ステップST16の処理の内容は後述する。
ステップST16の処理が完了すると処理はステップST10に移動する。
【0056】
上述したようにして、実施形態の自転車では、走行速度に応じたハンドル回動角速度制御処理・ハンドル回動量制限処理の後で、積載量に応じたハンドルハンドル回動角速度制御処理・ハンドル回動量制限処理をおこなうようにしたが、ステップST15の処理とステップST16の処理のどちらを先に処理するかは任意に選択が可能であり、また、どちらか一方のみをおこなうようにしても良い。
さらに、自転車の走行速度と積載物の重量のどちらを重要視するか、両者の各々の値の大きさを考慮して、例えば、走行速度と重量を変数とする連立方程式によって、回動角速度を制御し、ハンドル回動量の制限範囲を定めるようにしても良い。
【0057】
以下において、図8を参照してハンドルロック制御処理の説明をし、図9を参照して走行速度に応じたハンドル回動角速度制御処理・ハンドル回動量制限処理の説明をし、図10を参照して積載量に応じたハンドルハンドル回動角速度制御処理・ハンドル回動量制限処理の説明をし、図11を参照してハンドル操作圧を一定とする制御処理の説明をする。
【0058】
(ハンドルロック制御処理)
図8は、ステップST12でおこなわれるハンドルロック制御処理のフローチャートである。図8を参照して、ハンドルロック制御処理の内容を説明する。
【0059】
ステップST120では、CPUはハンドルレバー10の回動量(回動角度)であるハンドル回動量の目標値を0°(度)に設定する。
ここで、0°とは、上述したようにサドルの中心位置にある点(中心点)から左グリップ12Lまでの距離と、サドルの中心点から右グリップ12Rまでの距離とが等しくなった状態であり、自転車が直進する向きに前輪30がされる状態である。サドルの中心点からの右グリップ12Rまでの距離が、サドルの中心点からの左グリップ12Lまでの距離よりも短くなった状態(自転車が右手方向に旋回する状態)では、ハンドル回動量(回動角度)は正の値であり、サドルの中心点からの右グリップ12Rまでの距離が、サドルの中心点からの左グリップ12Lまでの距離よりも長くなった状態(自転車が左手方向に旋回する状態)では、ハンドル回動量(回動角度)は負の値である。
【0060】
ステップST121では、CPUは回動角度信号Saから現在の回動角度を検出する。そして、ハンドル回動量の目標値である0°から現在の回動角度を引き算した差である回動角度誤差信号を求める演算をおこなう。
【0061】
ステップST122では、CPUは、得られた回動角度誤差信号に応じた巻線制御信号Sdを求める、そして、CPUはこの巻線制御信号Sdを巻線駆動部41に出力する。
例えば、現在の回動角度が正値である場合(自転車が右手方向に旋回する状態)には、負荷装置50の巻線53a〜巻線53dに、自転車を左手方向に旋回させるような回転磁界を生じさせる。
また、回動角度誤差信号の大きさの絶対値が大きくなる程、回動軸55を駆動する力(トルク)を大きくするような巻線制御信号Sdを発生させる。
具体的には、CPUの指令に従い演算制御部42が、巻線53a〜巻線53dに与える駆動電力の周波数、駆動電圧、または、駆動電流、もしくは、これらの2以上を同時に制御する。この際に、上述した周知技術である、一次電圧制御、周波数制御、V/f一定制御、ベクトル制御等が採用される。
【0062】
ステップST120〜ステップST122の処理はフィードバック処理であり、タイマー割込みごとに、ステップST120〜ステップST122の処理が繰り返されることによって、回動角度誤差信号は0に収束し、回動角度も0°に収束する。
【0063】
このようにして、ハンドルレバー10の回動量が0°とされ、前輪30は直進する向きに制御されて駐輪をする。負荷装置50を備えない場合には、荷物籠15に積載する荷物の重量が重くその重心位置が左右のいずれかの一方向にずれている場合に、前輪30が重心のずれている方向に回動し、その結果、自転車の全体の重量バランスが崩れて自転車が転倒することがある。しかしながら、負荷装置50を備え、ハンドルロック制御処理を採用する実施形態の自転車では、前輪30は直進する向きに維持されるので自転車が転倒する事態は生じない。特に、自転車のスタンドを用いて自立させ、重い荷物を両手で運び、荷物籠15に積載するに際して、常時、前輪30は直進する向きに維持されるので、自転車に手を触れないでも自転車の自立状態は維持される。
【0064】
(走行速度に応じたハンドル回動角速度制御処理・ハンドル回動量制限処理)
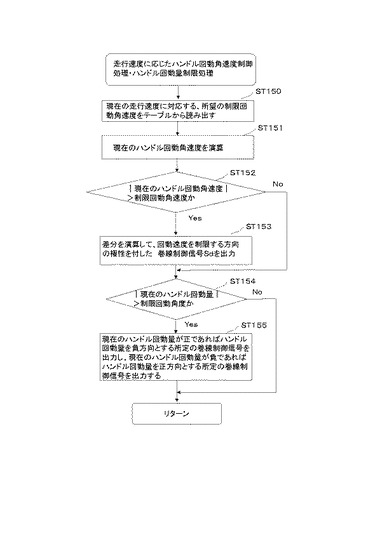
図9は、走行速度に応じたハンドル回動制限処理のフローチャートである。図9を参照して、ステップST15でおこなわれる走行速度に応じたハンドル回動角速度制御処理・ハンドル回動量制限処理について説明をする。ステップST150からステップST153までが、走行速度に応じたハンドル回動角速度制御処理であり、ステップST154からステップST155までが、走行速度に応じたハンドル回動量制限処理である。
【0065】
ステップST150では、CPUは現在の走行速度に対応する、所望の制限回動角速度をテーブルから読み出す。
現在の走行速度は、速度測定装置45から入力される速度信号SvをCPUが検出して得る。
所望の制限回動角速度が書き込まれているテーブルは、不揮発性メモリ、または、ROM(ロム)とされる。CPUはこれらから所望の制限回動角速度を得る。不揮発性メモリに、予め、所望の制限回動角速度を書き込むに際しては手動入力装置44が用いられる。
【0066】
ステップST151では、CPUは現在のハンドル回動角速度を演算する。
現在のハンドル回動角速度は、回動角度を時間微分して得られるが、実施形態では、CPUを用いる離散制御系とされているので、CPUが回動角度測定装置58から得られる回動角度信号Sa(現在のハンドル回動角度)から前回の割り込み処理において得た回動角度を引き算して時間差分を得て、これを時間微分に替えて用いる。
【0067】
ステップST152では、CPUは、|現在のハンドル回動角速度|>制限回動角速度か否かを判断する。
|現在のハンドル回動角速度|>制限回動角速度である場合(Yes)には処理はステップST153へ移動し、|現在のハンドル回動角速度|>制限回動角速度でない場合(No)には処理はステップST154へ移動する。つまり、|現在のハンドル回動角速度|が制限回動角度の範囲である場合には、負荷装置50は、なにもしないで、前輪30の負荷とならないように回転子54を自由に回転させる状態にしておく。
【0068】
ステップST153では、CPUは|現在のハンドル回動角速度|から制限回動角速度を引く差分信号を得る演算をおこない、|現在のハンドル回動角速度|を減少させる向きの極性を付してこの差分信号の大きさに応じた巻線制御信号Sdを出力する。
つまり、巻線駆動部41は、回転子54が現在回転している方向と反対側に回転する回転磁界を発生するように巻線53a〜巻線53dに電力を供給する。これによってハンドル回動角速度は減殺され、|現在のハンドル回動角速度|は制限回動角速度に近づく。そして、最終的にはハンドル回動角速度誤差信号の値を0にする方向に制御(フィードバック制御)がおこなわれるようにされている。
【0069】
ここで、現在の走行速度に対応する、所望の制限回動角速度をどのように決定するかであるが、自転車に乗る者の好みによって種々に決定することができる。制限回動角速度を小さく設定する場合には、急激なハンドル操作がし難くなる一方、外力、例えば、路面の凹凸によってハンドルが不安定に動くという事態の発生を軽減することができる。
【0070】
例えば、走行速度が遅い場合には、前輪30が振られやすく、切れ込みが発生し易くなるので、走行速度が遅い場合に、制限回動角速度を小さくして、急速なハンドル操作ができないようにすることを好む者は、このように設定することができる。例えば、走行速度が(800m/時)未満のときは制限回動角速度を(9°/秒)以内として、走行速度に比例して制限回動角速度を大きくし、または、走行速度が(800m/時)以上の場合には制限回動角速度を設けない等である。さらには、走行速度によらず制限回動角速度を一定値の比較的に小さな値とすることによっても同様の効果を得ることができる。
【0071】
一方、走行速度が遅い場合の前輪30の切れ込みにはあまり不安を感ぜず、むしろ、高速での急激なハンドル操作を危険防止の観点から好まない者は、走行速度が速い場合に、制限回動角速度を小さくする設定とすることができる。例えば、走行速度が(20km/時)以上のときは制限回動角速度を(45°/秒)以内とする等である。なお、所望の制限回動角速度の値を非常に大きく設定する場合には、ステップST153での処理は常にスキップされ、処理は、常にステップST152からステップST154へ移動することとなる。つまり、ハンドル回動角速度の制御はおこなわれないこととなる。
【0072】
ステップST154では、CPUは、|現在のハンドル回動量|>制限回動角度か否かを判断する。
CPUは、回動角度測定装置58からの回動角度信号Saを検出して現在のハンドル回動量(回動角度)を得る。
|現在のハンドル回動量|>制限回動角度である場合(Yes)には処理はステップST155へ移動し、|現在のハンドル回動量|>制限回動角度ではない場合(No)には処理は終了する。つまり、|現在のハンドル回動量|が制限回動角度の範囲であれば、負荷装置50は、なにもしないで、前輪30の負荷とならないように回転子54を自由に回転させる状態にしておく。
【0073】
ステップST155では、CPUは現在のハンドル回動量が正であればハンドル回動量を負方向とする所定の巻線制御信号を出力する。また、現在のハンドル回動量が負であればハンドル回動量を正方向とする所定の巻線制御信号を出力する。
このように巻線制御信号Sdの極性は定められ、ハンドル回動角度を所定の範囲に抑えるように負荷装置50は作用する。つまり、急激な前輪30の切れ込みが、ステップST155における処理で抑えられる。
【0074】
ここで、現在の走行速度に対応する、所望の制限回動角度をどのように決定するかであるが、自転車に乗る者の好みによって種々に決定することができる。例えば、走行速度が遅い場合には、前輪30が振られやすく、切れ込みが発生し易くなるので、走行速度が遅い場合に、制限回動角度を小さくすることを好む者は、このように設定することができる。例えば、走行速度が(800m/時)未満のときは制限回動角度を(30°)以内として、走行速度に比例して制限回動角度を大きくする等である。さらには、走行速度によらず制限回動角度を一定値、例えば60°に制限することもできる。
【0075】
一方、走行速度が遅い場合の前輪30の切れ込みにはあまり不安を感ぜず、むしろ、高速での大きな角度のハンドル操作を危険防止の観点から好まない者は、走行速度が速い場合に、制限回動角度を小さくする設定とすることができる。例えば、走行速度が(20km/時)以上のときは制限回動角速度を(45°)以内とする等である。なお、所望の制限回動角度の値を非常に大きく設定する場合には、ステップST155での処理は常にスキップされ、処理は、常にステップST154で終了して、ステップST16へ移動することとなる。つまり、ハンドル回動角度の制御はおこなわれないこととなる。
【0076】
(積載重量に応じたハンドル回動角速度制御処理・ハンドル回動量制限処理)
図10は、積載重量に応じたハンドル回動制限処理のフローチャートである。図10を参照して、ステップST16でおこなわれる積載量に応じたハンドル回動角速度制御処理・ハンドル回動量制限処理について説明をする。ステップST160からステップST163までが、積載量に応じたハンドル回動角速度制御処理であり、ステップST164からステップST165までが、積載量に応じたハンドル回動量制限処理である。
【0077】
ステップST160では、CPUは積載重量に対応する、所望の制限回動角速度をテーブルから読み出す。
積載重量は、積載量測定装置16(図2(a)を参照)から入力される積載量信号SwをCPUが検出して得る。また、積載量測定装置16a〜積載量測定装置16d(図2(b)を参照)のすべてから得られる信号を加算した和信号を積載量信号Swとして用いるようにしても良い。
所望の制限回動角速度が書き込まれているテーブルは、不揮発性メモリ、または、ROM(ロム)に配される。CPUはこれらから所望の制限回動角速度を得る。不揮発性メモリに、予め、所望の制限回動角速度を書き込むに際しては手動入力装置44が用いられる。
【0078】
ステップST161では、CPUは現在のハンドル回動角速度を演算する。
現在のハンドル回動角速度は、回動角度を時間微分して得られるが、実施形態では、CPUを用いる離散制御系とされているので、CPUが回動角度測定装置58から得られる回動角度信号Sa(現在のハンドル回動角度)から前回の割り込み処理において得た回動角度を引き算して時間差分を得て、これを時間微分に替えて用いる。
【0079】
ステップST162では、CPUは、|現在のハンドル回動角速度|>制限回動角速度か否かを判断する。
|現在のハンドル回動角速度|>制限回動角速度である場合(Yes)には処理はステップST163へ移動し、|現在のハンドル回動角速度|>制限回動角速度でない場合(No)には処理はステップST164へ移動する。つまり、|現在のハンドル回動角速度|が制限回動角度の範囲である場合には、負荷装置50は、なにもしないで、前輪30の負荷とならないように回転子54を自由に回転させる状態にしておく。
【0080】
ステップST163では、CPUは|現在のハンドル回動角速度|から制限回動角速度を引く差分信号を得る演算をおこない、|現在のハンドル回動角速度|を減少させる向きの極性を付してこの差分信号の大きさに応じた巻線制御信号Sdを出力する。
つまり、巻線駆動部41は、回転子54が現在回転している方向と反対側に回転する回転磁界を発生するように巻線53a〜巻線53dに電力を供給する。これによってハンドル回動角速度は減殺され、|現在のハンドル回動角速度|は制限回動角速度に近づく。
【0081】
ここで、積載重量に対応する、所望の制限回動角速度をどのように決定するかであるが、自転車に乗る者の好みによって種々に決定することができる。制限回動角速度を小さく設定する場合には、急激なハンドル操作がし難くなる一方、外力、例えば、路面の凹凸によってハンドルが不安定に動くという事態の発生を軽減することができる。
【0082】
例えば、積載重量が大きい場合には、前輪30が振られやすく、切れ込みが発生し易くなるので、積載重量が大きい場合に、制限回動角速度を小さくして、急速なハンドル操作ができないようにすることを好む者は、このように設定することができる。例えば、積載重量が(20kg)以上のときは制御回動角速度を(10°/秒)以内とする等である。また、積載重量に比例して制限回動角速度を小さくするようにしても良い。
【0083】
なお、所望の制限回動角速度の値を非常に大きく設定する場合には、ステップST163での処理は常にスキップされ、処理は、常にステップST162からステップST164へ移動することとなる。つまり、ハンドル回動角速度の制御はおこなわれないこととなる。
【0084】
ステップST164では、CPUは、|現在のハンドル回動量|>制限回動角度か否かを判断する。
CPUは、回動角度測定装置58からの回動角度信号Saを検出して現在のハンドル回動量(回動角度)を得る。
|現在のハンドル回動量|>制限回動角度である場合(Yes)には処理はステップST165へ移動し、|現在のハンドル回動量|>制限回動角度ではない場合(No)には処理は終了する。つまり、|現在のハンドル回動量|が制限回動角度の範囲であれば、負荷装置50は、なにもしないで、前輪30の負荷とならないように回転子54を自由に回転させる状態にしておく。
【0085】
ステップST165では、CPUは現在のハンドル回動量が正であればハンドル回動量を負方向とする所定の巻線制御信号を出力する。また、現在のハンドル回動量が負であればハンドル回動量を正方向とする所定の巻線制御信号を出力する。
このように巻線制御信号Sdの極性は定められ、ハンドル回動角度を所定の範囲に抑えるように負荷装置50は作用する。つまり、急激な前輪30の切れ込みが、ステップST165における処理で抑えられる。
そして、ステップST165の処理が終了すると、処理はステップST10へ移動する。
【0086】
ここで、積載重量に対応する、所望の制限回動角度をどのように決定するかであるが、自転車に乗る者の好みによって種々に決定することができる。例えば、積載重量が重い場合には、前輪30が振られやすく、切れ込みが発生し易くなるので、積載重量が重い程、制限回動角度を小さくすることを好む者は、このように設定することができる。例えば、積載重量が(20kg)以上のときは制限回動角度を(45°)以内とする等である。また、積載重量に比例して制限回動角度を小さくするようにしても良い。
【0087】
なお、所望の制限回動角度の値を非常に大きく設定する場合には、ステップST165での処理は常にスキップされ、処理は、常にステップST164で終了し、処理はステップST10へ移動することとなる。つまり、ハンドル回動角度の制御はおこなわれないこととなる。
【0088】
(ハンドル操作圧を一定とする制御処理)
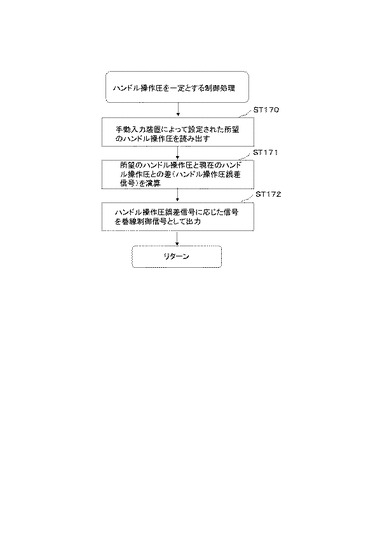
図11は、ハンドル操作圧を一定とする制御処理のフローチャートである。図11を参照して、ステップST17でおこなわれるハンドル操作圧を一定とする制御処理について説明をする。
【0089】
ハンドルレバー10の操作に際して、荷物籠15に積載する荷物の重量、自転車の走行速度にかかわらず、一定の操作圧でハンドルレバー10を操作することができれば、自転車を操作する者は快適な操作感を得ることができる。また、走行路面が左右方向に傾いた面であるか否か、走行路面が走行方向に傾いた坂道であるか否か、走行路面がコンクリート面であるか、泥道であるか等の路面状況に関係なく、一定の操作圧でハンドルレバー10を操作することができれば、自転車を操作する者は快適な操作感を得ることができる。ハンドル操作圧を一定とする制御処理は、このような操作感を得ることができる処理である。
【0090】
ハンドル操作圧を一定とする制御処理をおこなうために、ハンドルレバー10と人体(例えば、掌)との間の圧力を検出するためのハンドル操作圧検出装置46と、左ハンドル操作圧検出器14Lと、右ハンドル操作圧検出器14Rとが設けられている。
【0091】
ステップST170では、CPUは手動入力装置44によって設定された所望のハンドル操作圧を読み出す。
所望のハンドル操作圧は個人の好みによる大きさに設定することができる。例えば、女性、高齢者が、比較的に小さな力でハンドルレバー10を操作することを好む場合には、手動入力装置44によって所望のハンドル操作圧を小さく設定する。例えば、100gに設定する。一方、ハンドルレバー10の感触が、ずっしりと重いことを好む場合には、手動入力装置44によって所望のハンドル操作圧を大きく設定する。例えば、500gに設定する。
【0092】
ステップST171では、CPUは所望のハンドル操作圧と現在のハンドル操作圧との差(ハンドル操作圧誤差信号)を演算する。
具体的には、CPUは、ハンドル操作圧検出装置46からのハンドル操作圧信号Shから現在のハンドル操作圧を得て、所望のハンドル操作圧から現在のハンドル操作圧を引き算して、ハンドル操作圧誤差信号を得る。
【0093】
ステップST172では、CPUはハンドル操作圧誤差信号に応じた信号を巻線制御信号Sdとして出力する。
ここで、不感帯を設け、ハンドル操作圧信号Shの絶対値が所定範囲内である場合には、CPUは、回転子54に駆動力を与える大きさの巻線制御信号Sdを出力しないようにする。例えば、不感帯の幅を±50gに設定し、所望のハンドル操作圧を100gに設定する場合には、ハンドル操作圧信号Shが±50gに対応する範囲内では負荷装置50の回転子54は自由に回動する。一方ハンドル操作圧信号Shが±50gに対応する範囲を超えた途端にハンドルレバー10が、100gの力で、回動させようとする方向と反対の方向に押し返してくる感触を掌が感じることとなる。不感帯の中の操作としては、積極的にハンドルレバー10を操作することなく、単に掌を左グリップ12L、右グリップ12Rに軽く触れている場合がある。このようにすれば、回転子54および前輪30は無駄な動きをすることがなく、また、無駄な電力を消費しない。
【0094】
ステップST170〜ステップST172までの処理はフィードバック処理であり、タイマー割込みごとに、ステップST170〜ステップST172の処理が繰り返されることによって、ハンドルレバー10を操作する者の掌に所望のハンドル操作圧を与えながら、所望の方向に前輪30の回動角度を制御することができる。
【0095】
負荷装置50を備えない自転車においては、例えば、泥道で走行方向の変更をおこなう場合にはコンクリート道で走行方向の変更をおこなう場合に比べて大きな力が必要とされるが、負荷装置50を備え、ハンドル操作圧を一定とする制御を採用する実施形態の自転車においては、泥道では人の手による回動力がアシストされるので容易に走行方向の変更をおこなうことができる。つまり、負荷装置50を備えることによって、路面状況に左右されることがない操作感を得ることができる。
【0096】
また、負荷装置50を備えない自転車においては、荷物籠15に長さが長い重量物を積載する場合には左右方向の重心のアンバランスによって、所謂、左右の重心の移動した側にハンドルが取られる現象が生じるが、負荷装置50を備え、ハンドル操作圧を一定とする制御を採用する実施形態の自転車においては、このような現象は生じない。
【0097】
また、左右の一方の側に傾いた斜面を走行する場合にも、傾いた一方の側にハンドルが取られる現象が生じるが、負荷装置50を備え、ハンドル操作圧を一定とする制御を採用する実施形態の自転車においては、このような現象は生じない。
【0098】
(荷物籠の積載物の重心位置に応じたハンドル回動制限処理)
荷物籠15に積載物を積載するに際して、積載物の重量の大きさに応じて自転車全体の重心位置が変化して、ハンドル操作性を損なうので、積載物の重量に応じたハンドル回動制限処理をおこないハンドル操作性を改善することについては既に述べた。しかしながら、積載物の重量のみならず、その積載物の荷物籠15における重心位置が前輪30(ハンドルレバー10)の回動特性に大きく影響を与える場合がある。
【0099】
例えば、積載物の重量は比較的小さくとも、積載物の重心位置が大きく右によっている場合には、前輪30が右方向に回動し易くなる。つまり、ハンドルが右に取られ易くなる。反対に積載物の重量は比較的小さくとも、積載物の重心位置が大きく左によっている場合には、ハンドルが左に取られ易くなる。また、積載物の重心位置が大きく前方によっている場合には、実際の積載物の重量以上にハンドルが右または左に取られ易くなる。このような場合にも安定した走行を可能にするのが、荷物籠の積載物の重心位置に応じたハンドル回動制限処理である。
【0100】
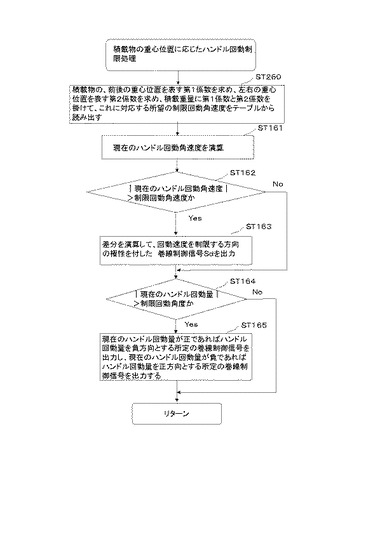
図12は、積載物の重心位置に応じたハンドル回動制限処理のフローチャートである。図12を参照して処理の内容について説明をする。図10に示す積載重量に応じたハンドル回動角速度制御処理・ハンドル回動量制限処理のフローチャートのステップST160の処理内容が、図12では、ステップST260で示す処理内容に変更されている点が、図10と図12とでは異なるので、この点について説明をする。
【0101】
ステップST260ではCPUは、以下の処理をおこなう。
CPUは、積載物の、前後の重心位置を表す第1係数を求め、左右の重心位置を表す第2係数を求める。
また、CPUは、積載重量に第1係数と第2係数を掛けて、これに対応する所望の制限回動角速度をテーブルから読み出す。
【0102】
積載物の、前後の重心位置を表す第1係数、左右の重心位置を表す第2係数について説明をする。第1係数、第2係数を求めるに際しては、図2(b)に示す積載量測定装置16a〜積載量測定装置16aが用いられる。CPUに入力される積載量信号Swには、この場合には、積載量測定装置16aから得られる積載量信号Swa、積載量測定装置16bから得られる積載量信号Swb、積載量測定装置16cから得られる積載量信号Swc、積載量測定装置16dから得られる積載量信号Swd の各々が含まれる。
【0103】
第1係数は以下の式で得られる。
第1係数=1
ただし(Swa+Swb)/(Swa+Swb)<1の場合
第1係数={1+(Swa+Swb)/(Swa+Swb)}
ただし(Swa+Swb)/(Swa+Swb)>1の場合、また、第1係数の値は2以上の場合は、例えば、2とする。
【0104】
第2係数は以下の式で得られる。
第2係数={1+(Swa+Swc)/(Swb+Swd)}、
または、{1+(Swb+Swd)/(Swa+Swc)}のいずれかの値が大きい方。
また、第2係数の値は3以上の場合は、例えば、3とする。
【0105】
第1係数が大きいことは、自転車全体の重心の位置が、より前方に移動することであるので、前輪30(ハンドルレバー10)は切れ込みを生じ易くなる。また、第2係数は左右のいずれかに重心が移動した場合に大きくなる係数であり、第2係数が大きいことは、重心の位置が左右に移動することであるので、前輪30(ハンドルレバー10)は切れ込みを生じ易くなる。このように、第1係数、第2係数の値が大きくなる場合には、実際の重量に比べてより大きな重量を積載したと同様の効果が生じる。
【0106】
そこで、以下のように実際の重量に第1係数と第2係数を掛けた得られた値が切れ込みに影響を与える重量と見なしている。ここで、第1係数の値の上限を2とし、第2係数の値を3とするのは、補正のための第1係数、第2係数の値が過大になりすぎるのを防止するためである。上限値である、2、3は、実験によって、自転車の特性に合わせて他の値とすることができる。
【0107】
切れ込みに影響を与える重量=実際の重量×第1係数×第2係数
【0108】
なお、実際の重量は、以下の式で求められる。
実際の重量=Swa+Swc+Swb+Swd
【0109】
このようにして、実際の重量を上述した補正式によって補正して、切れ込みに影響を与える重量に対応する制限回動角速度をテーブルから読み出すことによって、回動制限処理の効果をより良好なものとできる。この補正式は、一例に過ぎず、実験によって、個々の自転車ごとに、最も良好な効果が得られる他の式を用いても良い。
【0110】
実施形態の自転車は、フレーム固定部に対して回動する前輪とこの前輪に連結されたハンドルレバーとの回動軸に対して回動力を付与するためにフレーム固定部に固着される負荷装置をそなえている。また、負荷装置が発生する回動力の大きさを求め、負荷装置が該回動力を発生するように制御する演算制御部を備えている。
【0111】
この負荷装置を備える実施形態の自転車の技術は、通常の自転車であっても、アシスト自転車であっても、電動二輪車であっても実施が可能である。また、負荷装置としては、発生するトルク量が調整できる機構であれば、誘導電動機のみならず、直流電動機、同期機等も使用することが可能である。また、制御演算部でおこなう制御演算に関しては、上述した演算則は、一実施例であり、単に回動角速度をフィードバックする制御、自転車の走行状態に応じた種々の制御、積載物の重量に応じた種々の制御等、広範囲な制御の演算則を採用することができる。
【0112】
実施形態の自転車は、自転車の構造を変えることなく、自転車のハンドル操作性を制御する機能を有するものである。例えば、自転車の駐停車時においてはハンドルの自由回動を阻止するハンドル操作特性とすることができ、自転車の走行時においては、自転車の走行速度、籠に積載する荷物またはチャイルドシートに乗車する子供の重量に応じて切れ込み特性を制御することができる。そして、前輪が必要以上に切られてしまい、駐停車時に転倒し、走行時に操作性が低減してしまう事態が生じることを防止できる。さらに、高速走行時において安全な操作が可能となる。
【符号の説明】
【0113】
1 自転車、 10 ハンドルレバー、 11L 左ブレーキレバー、 11R 右ブレーキレバー、 12L 左グリップ、 12R 右グリップ、 13 ベル、 14L 左ハンドル操作圧検出器、 14R 右ハンドル操作圧検出器、 15 荷物籠、 16、16a、16b、16c、16d 積載量測定装置、 17 荷物籠取付板、 20 ステム、 21 ステム回動軸、 22、24 カップリング装置、 23a、23b、25a、25b ビス、 26 フォークブレード、 27 ダウンチューブ、 28 シートチューブ、 29 サドル、 30 前輪、 31 後輪、 33 ペダル、 34 シートスティブリッジ、 35 チェンスティ、 36 電動モータ部、 37 チェン、 38 スプロケット、 41 巻線駆動部、 42 演算制御部、 44 手動入力装置、 45 速度測定装置、 46 ハンドル操作圧検出装置、
50 負荷装置、 51 磁気枠部、 52a、52b、52c、52d 磁気鉄心、 53a、53b、53c、53d 巻線、 54 回転子、 55、55a、55b 回動軸、 56a、56b 取付部、 58 回動角度測定装置、 58a 回動角度測定装置固定部、 58b 回動角度測定装置回動部
【技術分野】
【0001】
本発明は、自転車に関し、特に、自転車のハンドル操作性を制御する機能を有する自転車に関するものである。
【背景技術】
【0002】
図13は、駐停車時において、ハンドルの自由回動を阻止するための自転車のハンドルストッパー装置を示す図である(特許文献1を参照)。ハンドルストッパー装置本体101にスライド軸102がセットされたハンドルストッパー装置を自転車フレーム110に固定バンド106、ボルト112、ナット113を用いて取り付けるようにしている。スライド軸102のスライドノブ103を上昇させて、荷物カゴ取り付け用ブラケット109の切欠け穴に挿入することで連結固定するようにしている。
【0003】
図14は、荷物用の籠(またはチャイルドシート)216が固着されるハンドル212の回動規制装置を示す図である(特許文献2を参照)。ハンドル212の回転中心に備えられたステアリング軸213が車体フレーム前端のヘッドパイプ211に回転自在に装着され、ステアリング軸213の軸上に荷物用の籠または子供を乗せるためのチャイルドシート216が取付可能なハンドル212を備える。籠またはチャイルドシート216の下方の可動部と、車体フレーム201との間に、ハンドル212の切れ込みを規制し、ハンドル212を中立方向に戻すためのばね部材226を備えている。このようにしてハンドルが大きく切れ込むことを防いでいる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】実用新案登録第3140016号公報
【特許文献2】特開2000−159175号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1には、自転車の駐停車時において、ハンドルの自由回動を阻止する技術が開示されている。特許文献2には、ばね部材226を設けて、走行時にハンドルが大きく切れ込むことを防止する技術が開示されている。しかしながら、特許文献1に記載の技術と特許文献2に記載の技術を組み合わせて、駐停車時において、ハンドルの自由回動を阻止し、走行時に大きく切れ込むことを防止するようにすると、構造が複雑になってしまう。また、走行時における切れ込み特性を、自転車の走行速度、荷物籠またはチャイルドシートに積載する物または子供の重量に応じて変化させることはできない。すなわち、従来技術では、走行条件、積載条件に応じて自転車のハンドル操作性を制御することができない。
【0006】
本発明は、上述した課題を解決して、自転車の構造を変化させることなく、自転車のハンドル操作性を制御することができる自転車を提供するものである。
【課題を解決するための手段】
【0007】
本発明の自転車は、フレーム固定部に対して回動する前輪と該前輪に連結されたハンドルレバーとの回動軸に対して回動力を付与するために該フレーム固定部に配される負荷装置と、前記負荷装置が発生する所望回動力の大きさを求め、該負荷装置が該所望回動力を発生するように制御する演算制御部と、を備える。
【0008】
本発明の自転車では、負荷装置とこの負荷装置を制御する演算制御部とを備え、ハンドルレバーに回動力を付与することができる。
【発明の効果】
【0009】
本発明の自転車によれば、負荷装置を制御して、ハンドル操作性を制御することができる。
【図面の簡単な説明】
【0010】
【図1】実施形態の自転車を示す図である。
【図2】図1に示す自転車のA−A’線を含む面の断面図である。
【図3】図1に示す自転車のC−C’線(ハンドル回動軸)を含む面の断面図である。
【図4】図1に示す自転車の負荷装置のB−B’線を含む面の断面図である。である。
【図5】自転車の負荷装置の動作原理を示す図である。
【図6】自転車の制御系の構成を示す図である。
【図7】制御系における処理のフローチャートである。
【図8】ハンドルロック制御処理のフローチャートである。
【図9】走行速度に応じたハンドル回動角速度制御処理・ハンドル回動量制限処理のフローチャートである。
【図10】積載重量に応じたハンドル回動角速度制御処理・ハンドル回動量制限処理のフローチャートである。
【図11】ハンドル操作圧を一定とする制御処理のフローチャートである。
【図12】積載物の重心位置に応じたハンドル回動制限処理のフローチャートである。
【図13】背景技術を示す図である。
【図14】背景技術を示す図である。
【発明を実施するための最良の形態】
【0011】
実施形態の自転車は、フレーム固定部に対して回動する前輪と前輪に連結されたハンドルレバーとの回動軸に対して回動力を付与するためにフレーム固定部に固着される負荷装置と、負荷装置が発生する回動力の大きさを求め、負荷装置が回動力を発生するように制御する演算制御部と、を備える自転車である。以下、図面を参照して、具体的な実施形態について説明をする。
【0012】
(実施形態の自転車の構造の説明)
図1は、実施形態の自転車を示す図である。図2は、図1に示す自転車のA−A’線を含む面の断面図である。図3は、図1に示す自転車のC−C’線(ハンドル回動軸)を含む面の断面図である。図4は、図1に示す自転車の負荷装置のB−B’線を含む面の断面図である。以下、図1〜図4に沿って順に実施形態の自転車の構造の説明をする。
【0013】
図1に示す自転車1は電動アシスト自転車である。電動アシスト自転車は、電池を動力源として走行力の一部を電動モータから得るものである。電動アシストの技術は周知の技術であるので説明を省略する。実施形態の自転車について、必要な範囲でその構造を簡単に説明する。
【0014】
自転車1は、一般的な自転車が通常備えると同様な、前輪30、後輪31を有している。また、ダウンチューブ27とシートチューブ28とシートスティブリッジ34とチェンスティ35とでフレーム固定部を形成している。ダウンチューブ27の先端には、負荷装置50が備えられている。負荷装置50については詳細に後述するが、負荷装置50は誘導電動機として構成されている。負荷装置50の内部で回動する回転子(図3の符号54を参照)に連結される回動軸55の一方の端部である回動軸55aと他方の端部である回動軸55bとが負荷装置50の外部に伸びている。図1に示す一点鎖線は回動軸55の回動中心を示すものである。
【0015】
回動軸55bにはカップリング装置24を介して前輪30を支持するフォークブレード26が連結されている。また、回動軸55aにはカップリング装置22を介してステム回動軸21が連結されている。ステム回動軸21はステム20と固着され、ステム回動軸21と固着されるステム20の底部は平板状となっている。また、ステム20の上部はハンドルレバー10を支持するようにされている。
【0016】
ステム20の底部には、荷物籠取付板17が固着されている。荷物籠取付板17は荷物を積載するための荷物籠15の底面を水平にするために設けられている。荷物籠15と荷物籠取付板17との間には、荷物籠15に積載する荷物の重量を検出するための積載量測定装置16が備えられている。積載量測定装置16は、磁歪センサ、ストレインゲージ等の通常用いられる圧力検出装置であり重量が電圧量に変換して検出される。
【0017】
フォークブレード26の先端部に前輪30が支持され、ハンドルレバー10の操作によって、フレーム固定部に対して前輪30を一点鎖線で示す回動軸を中心として回動させて、自転車の進行方向を制御できるようにされている。
【0018】
シートチューブ28とシートスティブリッジ34とチェンスティ35とで形成される三角形の先端部分に後輪31が支持されている。後輪31の回転中心部にはスプロケット38が配置され、チェンスティ35に沿って配置されるチェン37がスプロケット38に駆動力を伝達して、後輪31を回転させる。チェン37に駆動力を与えるためにペダル33と電動モータ部36とが配置され、ペダルからの駆動力に加えて、電動モータ部36に格納される電動モータ(図示せず)からの駆動力が後輪31の回転力として合成され、ペダルからの駆動力をアシストするようになされている。
【0019】
シートチューブ28とシートスティブリッジ34とチェンスティ35とで形成される三角形の別の先端部分から、シートチューブ28の長手方向に伸びるポストの先にサドル29が配されている。
【0020】
図1に示す自転車1のA−A’線を含む面の断面図である、図2に沿って説明をする。図2(a)と図2(b)とでは、積載量測定装置の構成が異なっている。図2(a)では、ストレインゲージ、磁歪センサ等を利用した1個の積載量測定装置16を用いて荷物籠15に積載される荷物の総重量を測定するようになされている。一方、図2(b)では、積載量測定装置は、積載量測定装置16aと積載量測定装置16bと積載量測定装置16cと積載量測定装置16dとの4個の積載量測定装置を備えている。
【0021】
積載量測定装置16aからの検出信号と積載量測定装置16bからの検出信号との和の検出信号は荷物籠15の前方向(進行方向)に加重される重量である前方向荷重を表し、積載量測定装置16cからの検出信号と積載量測定装置16dからの検出信号との和の検出信号は荷物籠15の後方向に加重される重量である後方向荷重を表す。また、積載量測定装置16bからの検出信号と積載量測定装置16dからの検出信号との和の検出信号は荷物籠15の右方向(進行方向に向かって右の方向)に加重される重量である右方向荷重を表す。また、積載量測定装置16aからの検出信号と積載量測定装置16cからの検出信号との和の検出信号は荷物籠15の左方向に加重される重量である左方向荷重を表す。
【0022】
前方向荷重から後方向荷重を引き算した演算結果は、積載物の荷物籠15における前後の重心位置を表し、演算結果が0であれば、荷物籠15の前後方向の中心位置に積載物が配置されていることを表す。演算結果が正値であれば、荷物籠15の中心位置から前方に重心位置が移動して積載物が配置されていることを表す。演算結果が負値であれば、荷物籠15の中心位置から後方に重心位置が移動して積載物が配置されていることを表す。
【0023】
また、右方向荷重から左方向荷重を引き算した演算結果は、積載物の荷物籠15における左右の重心位置を表し、演算結果が0であれば、荷物籠15の左右方向の中心位置に積載物が配置されていることを表す。演算結果が正値であれば、荷物籠15の中心位置から右に重心位置が移動して積載物が配置されていることを表す。演算結果が負値であれば、荷物籠15の中心位置から左に重心位置が移動して積載物が配置されていることを表す。積載量測定装置16、または、積載量測定装置16a〜積載量測定装置16dがどのように用いられるかについては後述する。
【0024】
ハンドルレバー10の両方の先端には、左グリップ12L、右グリップ12Rが配され、ハンドルレバー10の回動が容易にできるようにされている。ハンドルレバー10の回動の中心は、ステム回動軸21の回動の中心と一致している。左ブレーキレバー11L、右ブレーキレバー11Rによって自転車1の速度を減速し、ベル13は警告音を発することができる。
【0025】
左ハンドル操作圧検出器14Lは、ハンドルレバー10のa面とb面とに各々ストレインゲージを貼り付けて構成されている(図2を参照)。ハンドルレバー10は金属等を材料とするが、左グリップ12Lに加えられる回動力に応じて、a面とb面との各々は、一方が伸びると他方は縮むので、a面のストレインゲージの出力とb面のストレインゲージの出力との差から、左グリップ12Lが与える回動力の大きさを検出することができる。
【0026】
同様にして、右ハンドル操作圧検出器14Rは、ハンドルレバー10のa面とb面とに各々ストレインゲージを貼り付けて構成されている(図2を参照)。右グリップ12Rに加えられる回動力に応じて、a面とb面との各々は、一方が伸びると他方は縮むので、a面のストレインゲージの出力とb面のストレインゲージの出力との差から、右グリップ12Rが与える回動力の大きさを検出することができる。
【0027】
ハンドルレバー10には手動入力装置44が取り付けられている。手動入力装置44がどのように用いられるかについては後述する。なお、荷物籠15に替えてチャイルドシートを用いる場合においても同様な積載量測定装置16、または、積載量測定装置16a〜積載量測定装置16dを用いて子供の体重を測定することができる。
【0028】
図1に示す自転車のC−C’線(ハンドル回動軸)を含む面であって紙面と平行する面の断面図である、図3に沿って説明をする。図3は、負荷装置50を中心に示す図である。負荷装置50は固定部と回転子54とを有している。固定部は、磁気枠部51と、磁気鉄心52a、磁気鉄心52b、磁気鉄心52c、磁気鉄心52d(磁気鉄心52b、磁気鉄心52dは図4を参照)とを有している。また、磁気鉄心52a〜磁気鉄心52dの各々には、巻線53a〜巻線53d(巻線53b、巻線53dは図4を参照)が巻回されている。
【0029】
回転子54の中心には、負荷装置50の外部に突出した回動軸55aと回動軸55bとをその一部として有する回動軸55が連結されている。回転子54は、回動軸55の伸びる方向の両端には短絡環を有し、両方の短絡環は二次導体で連結されている。負荷装置50は、このような固定部と回転子54とを有して、周知技術である誘導電動機として機能する。
【0030】
つまり、巻線53a〜巻線53dに流れる電流によって生じる回転磁界の方向が右回りである場合には回転子54に右回りの回転力を発生させ、巻線53a〜巻線53dに流れる電流によって生じる回転磁界の方向が左回りである場合には回転子54に左回りの回転力を発生させる。そして、ハンドルレバー10を右方向に手動で回動させる場合において回転子54に右回りの回転力を発生させる場合には手動による回動力をアシストし、ハンドルレバー10を右方向に手動で回動させる場合において回転子54に左回りの回転力を発生させる場合には手動による回動力を減殺する。また、ハンドルレバー10を左方向に手動で回動させる場合において回転子54に左回りの回転力を発生させる場合には手動による回動力をアシストし、ハンドルレバー10を左方向に手動で回動させる場合において回転子54に右回りの回転力を発生させる場合には手動による回動力を減殺する。
【0031】
また、負荷装置50は回動角度測定装置58を有している。回動角度測定装置58は回動軸55とともに回動する回動角度測定装置回動部58bと固定部である磁気枠部51に固着された回動角度測定装置固定部58aとを有している。回動角度測定装置58は、周知技術であり、磁気方式、光学方式等の種々の周知技術に基づくものとすることができる。回転子54、すなわち、回動軸55の回動角度は、回動角度測定装置固定部58aから電気信号として検出することができる。
【0032】
回動軸55aはカップリング装置22に挿入されてビス23bによって係止され、ステム回動軸21はカップリング装置22に挿入されてビス23aによって係止されている。また、回動軸55bはカップリング装置24に挿入されてビス25aによって係止され、フォークブレード26はカップリング装置24に挿入されてビス25bによって係止されている。また、磁気枠部51には、取付部56aと取付部56b(図4を参照)とが一体成型されており、取付部56aと取付部56bとの各々がボルトとナットとでダウンチューブ27と連結されている。
【0033】
図1、図3に示す負荷装置50のB−B’線を含む面の断面図である、図4に沿って誘導電動機である負荷装置50の構造をさらに説明する。図4に付した符号が示す各部は、図3に示す同一符号を付した部分と同一部分を指し示すのでその説明は省略する。巻線53a〜巻線53dに流れる電流を制御することによって、磁気鉄心52a〜磁気鉄心52dに回転磁界を発生させ、回転子54の二次導体に流れる電流との相互作用で回転子54に回転力を得ることができる。
【0034】
(実施形態の負荷装置の制御系の説明)
図5を参照して、負荷装置50の動作原理を説明する。負荷装置50の巻線53a〜巻線53dの各々は巻線駆動部41の4個のドライバーの各々に接続されている。巻線駆動部41に対しては、演算制御部42から巻線制御信号Sdが送出される。演算制御部42は、回動角度測定装置固定部58aから回動軸55の回動角度を得て、演算制御部42の内部で演算して巻線制御信号Sdを発生させる。
【0035】
ここで、演算制御部42でおこなう演算は、誘導電動機の制御技術に基づく演算である。例えば、一次電圧制御の演算、または、周波数制御の演算、または、V/f一定制御の演算、さらに、瞬時の応答を良くするために、ベクトル制御の演算のいずれかである。以上の制御の方法はいずれも周知の技術である。このようにして、各種の演算によって回動軸55に発生するトルク、すなわち、ハンドルレバー10を通じてハンドルを介して自転車を操作する者が感知するトルクの大きさの制御をおこなうことができ、ハンドル操作性を所望のものとすることができる。
【0036】
(実施形態の自転車の全体の制御系の説明)
演算制御部42は、上述したように負荷装置50を制御する制御系の一部として機能するのみならず、各種の制御機能を有する。
【0037】
図6は、自転車の制御系の構成を示す図である。図6を参照して制御系の説明をする。制御系においては、演算制御部42が中心となって制御をおこなう。なお、実施形態では自転車1は電動アシスト自転車であるとして説明をしているので、電動アシストの機能も演算制御部42でおこなうが、電動アシストの技術は周知技術であるので、説明を省略する。アシストモータを備えない自転車、常時、電動モータで駆動力が与えられる電動二輪車においても、図6に示す実施形態の制御系は適用できるものである。
【0038】
演算制御部42は、いずれも図示しない、CPU(中央演算装置)、RAM(ラム)、書き換え可能な不揮発性メモリ、ROM(ロム)、I/Oインターフェイス回路(入出力インターフェイス回路)を有している。CPUのバスライン(アドレスバスライン・データバスライン)にはCPU、RAM(ラム)、ROM(ロム)、I/Oインターフェイス回路が接続されている。
【0039】
ROMはCPUで実行されるプログラムを記憶し、RAMはCPUでの演算データを一時記憶する。また、I/Oインターフェイス回路は外部回路とCPUとの間での信号の入出力のためのA/D変換器、D/A変換器等を有している。また、ROMには、負荷装置50の制御のためのルックアップテーブルが格納されている。不揮発性メモリには、記憶内容の書き換え後、電源を切断した後でも、記憶内容が保持される。
【0040】
ハンドル操作圧検出装置46は、ハンドルレバー10を回動するためのハンドル操作圧信号Shを検出する。ハンドル操作圧信号Shは、左グリップ12Lに加わる操作圧信号と右グリップ12Rに加わる操作圧信号との差分として求められる。そして、後述するハンドル操作圧を一定とする制御処理では、この差分信号が前輪30に連結される回動軸55を回動させる回動力を負荷装置50に発生させるのである。
【0041】
速度測定装置45は、チェン37の走行速度、または、後輪31の回転角速度から自転車の走行速度に応じた速度信号Svを求める。
【0042】
演算制御部42には、入力信号として、ハンドル操作圧検出装置46からのハンドル操作圧信号Shが入力される。また、積載量測定装置16、または、積載量測定装置16a〜積載量測定装置16dからの積載量信号Swが入力される。また、回動角度測定装置58の回動角度測定装置固定部58aからの回動角度信号Saが入力される。また、手動入力装置44からの手動入力信号Smが入力される。また、速度測定装置45からの速度信号Svが入力される。そして、上述したように、演算制御部42からは、巻線制御信号Sdが出力され、巻線制御信号Sdは巻線駆動部41に入力される。
【0043】
(実施形態における制御系の作用)
実施形態の自転車1は、図6に示すような制御系を有して、自転車1の回動軸55の動きを様々に制御することが可能となる。以下に実施例としていくつかの制御方法を述べる。
【0044】
図7は、自転車1の制御系におけるCPUがおこなう処理のフローチャートである。図7のフローチャートに沿って、演算制御部42のCPUがおこなう処理の内容を説明する。
【0045】
演算制御部42の電源が電源ON(オン)とされることによって、処理は開始する。
所定の周期毎にステップST10の処理が開始されるタイマー割込み処理とされている。
【0046】
ステップST11では、CPUは駐輪モードを選択するか否かを判断する。
駐輪モードとは自転車を走行させることなく、スタンドを立てて自転車を自立させるモードである。
駐輪モードであるか否かの判断は、CPUが手動入力装置44の駐輪ボタンが押されたことを検出して駐輪モードであると判断しても良く、また、所定時間、例えば、30秒間、速度測定装置45からの速度信号Svが速度0であることを示す場合に駐輪モードであると判断するようにしても良い。
ステップST11において、CPUが駐輪モードであると判断する場合(Yes)には処理はステップST12に移動し、CPUが駐輪モードであると判断しない場合(No)には処理はステップST13に移動する。
【0047】
ステップST12では、CPUはハンドルロック制御処理をおこなう。
ハンドルロック制御処理は、前輪30が直進方向(回動角度0度)に向くようにハンドルレバーを維持する処理である。ここで、回動角度0度であるということは、サドルの中心位置にある点(中心点)から左グリップ12Lまでの距離と、サドルの中心点から右グリップ12Rまでの距離とが等しくなった状態である。
ハンドルロック状態では、自転車の地面に対する射影面積が最小となり、複数台の自転車を並列に駐輪するには最も効率的である。また、重い荷物を荷物籠15に積載する場合には、重心位置の僅かなアンバランスで前輪30とハンドルレバー10が大きく回動する可能性が大きいが、ハンドルロック制御処理はこのような場合に回動角度0度に維持するものである。
ステップST12でおこなうハンドルロック制御処理の内容については後述する。
ステップST12での処理が完了すると処理はステップST10に移動する。
【0048】
ステップST13では、CPUは操作圧一定モードを選択するか否かを判断する。
操作圧一定モードとは自転車を走行中にハンドル操作をおこなう場合において、荷物籠15の荷物の重量が重い場合でも、荷物の重量が軽い場合と同様のハンドルレバー10の操作感を得ることができるようにするモードである。
駐輪モードであるか否かの判断は、CPUが、手動入力装置44によって操作圧一定モードとされたことを検出することによっておこなわれる。
ステップST13において、CPUが操作圧一定モードであると判断する場合(Yes)には処理はステップST17に移動し、CPUが操作圧一定モードであると判断しない場合(No)には処理はステップST14に移動する。
【0049】
ステップST17では、CPUは操作圧一定モード処理、すなわち、ハンドル操作圧を一定とする制御処理をおこなう。
ハンドル操作圧を一定とする制御処理の内容は後述する。
ステップST17での処理が完了すると処理はステップST10に移動する。
【0050】
ステップST14では、CPUは走行状況検出をおこなう。
CPUは、回動角度信号Saから現在のハンドル回動量(回動角度)を検出し、速度信号Svから現在の自転車の走行速度を検出し、積載量信号Swから荷物籠15に積載された荷物の現在の重量を検出する。
ステップST14での処理が完了すると処理はステップST15に移動する。
【0051】
ステップST15では、CPUは走行速度に応じたハンドル回動角速度制御処理・ハンドル回動量制限処理をおこなう。
ハンドル回動角速度制御処理と、ハンドル回動量制限処理とは、別個独立の2つの処理である。どちらか一方の処理をおこなった後に他方の処理をおこなうようにしても良く、また、選択的にどちらか一方の処理のみをおこなうようにしても良い。
【0052】
ステップST15での処理は、自転車の走行速度が遅いときに前輪30(ハンドルレバー10)に直線方向に進路を戻す復元力が働かないために操作が安定しないことに鑑みおこなわれる処理である。または、走行速度が速いときの急激(高回転角速度)なるハンドル操作、大(大きな回転角度)なるハンドル操作の危険性に鑑みて行われる処理である。例えば、負荷装置50を備えない自転車では、自転車の走行速度が遅いときには、前輪30(ハンドルレバー10)が小さな回動力(例えば、地面の凹凸によって生じる回動力、人がハンドルレバー10を操作することによる回動力、荷物籠15の荷物のアンバランスによる回動力)で簡単に回動してしまう(前輪の切れ込み)。このような急激な前輪30の切れ込みは、自転車の走行を不安定とする。一方、自転車が比較的高速で走行する場合には、ジャイロ作用によって前輪30の走行方向は安定しているので、急に切れ込みが生じることは少なくなるが、急激、大なるハンドル操作には危険性が伴う。
【0053】
負荷装置50を備える実施形態の自転車では、ステップST15において、ハンドル回動角速度制御処理をおこない、自転車の走行速度に応じて前輪30の動き易さを制御し、または、自転車の走行速度によらず一定の動き易さを得るようにしている。そして、急激な前輪30の切れ込みを防止して良好なる自転車の操作感が得られることとなる。
また、ステップST15において、自転車の走行速度に応じて、ハンドルの回動角度の量を制限するハンドル回動量制限処理をおこない、前輪30の回動角度の範囲を制限することによって、急激な前輪30の切れ込みを防止して良好なる自転車の操作感が得られることとなる。
ステップST15の処理の詳細な内容は後述する。
ステップST15の処理が完了すると処理はステップST16に移動する。
【0054】
ステップST16での処理は、荷物籠15に大きな荷物が積載されている場合において、特に、力が弱い女性、高齢者、低年齢者が自転車を操作する場合、荷物の重量によって、前輪30が急に切れ込む事態が生じることに鑑みおこなわれる処理である。例えば、負荷装置50を備えない自転車では、積載物の重量が重い場合に、積載物の重心位置の移動、路面の不安定によって、前輪30(ハンドルレバー10)が急速に回転する切れ込みが発生する。
【0055】
負荷装置50を備える実施形態の自転車では、ステップST16において、ハンドル回動角速度制御処理をおこない、荷物籠15の積載物の重量に応じて前輪30の回動角速度を制御し、または、積載物の重量よらず前輪30の回動角速度を一定として、急激な前輪30の切れ込みを防止して良好なる自転車の操作感が得られることとなる。
また、ステップST16において、積載物の重量に応じて回動角度の範囲を定めるハンドル回動量制限処理をおこない、前輪30(ハンドルレバー10)の回動範囲を制限して、積載物の重量に振られて前輪30が急激に切れ込むことがないようにする。
ステップST16の処理の内容は後述する。
ステップST16の処理が完了すると処理はステップST10に移動する。
【0056】
上述したようにして、実施形態の自転車では、走行速度に応じたハンドル回動角速度制御処理・ハンドル回動量制限処理の後で、積載量に応じたハンドルハンドル回動角速度制御処理・ハンドル回動量制限処理をおこなうようにしたが、ステップST15の処理とステップST16の処理のどちらを先に処理するかは任意に選択が可能であり、また、どちらか一方のみをおこなうようにしても良い。
さらに、自転車の走行速度と積載物の重量のどちらを重要視するか、両者の各々の値の大きさを考慮して、例えば、走行速度と重量を変数とする連立方程式によって、回動角速度を制御し、ハンドル回動量の制限範囲を定めるようにしても良い。
【0057】
以下において、図8を参照してハンドルロック制御処理の説明をし、図9を参照して走行速度に応じたハンドル回動角速度制御処理・ハンドル回動量制限処理の説明をし、図10を参照して積載量に応じたハンドルハンドル回動角速度制御処理・ハンドル回動量制限処理の説明をし、図11を参照してハンドル操作圧を一定とする制御処理の説明をする。
【0058】
(ハンドルロック制御処理)
図8は、ステップST12でおこなわれるハンドルロック制御処理のフローチャートである。図8を参照して、ハンドルロック制御処理の内容を説明する。
【0059】
ステップST120では、CPUはハンドルレバー10の回動量(回動角度)であるハンドル回動量の目標値を0°(度)に設定する。
ここで、0°とは、上述したようにサドルの中心位置にある点(中心点)から左グリップ12Lまでの距離と、サドルの中心点から右グリップ12Rまでの距離とが等しくなった状態であり、自転車が直進する向きに前輪30がされる状態である。サドルの中心点からの右グリップ12Rまでの距離が、サドルの中心点からの左グリップ12Lまでの距離よりも短くなった状態(自転車が右手方向に旋回する状態)では、ハンドル回動量(回動角度)は正の値であり、サドルの中心点からの右グリップ12Rまでの距離が、サドルの中心点からの左グリップ12Lまでの距離よりも長くなった状態(自転車が左手方向に旋回する状態)では、ハンドル回動量(回動角度)は負の値である。
【0060】
ステップST121では、CPUは回動角度信号Saから現在の回動角度を検出する。そして、ハンドル回動量の目標値である0°から現在の回動角度を引き算した差である回動角度誤差信号を求める演算をおこなう。
【0061】
ステップST122では、CPUは、得られた回動角度誤差信号に応じた巻線制御信号Sdを求める、そして、CPUはこの巻線制御信号Sdを巻線駆動部41に出力する。
例えば、現在の回動角度が正値である場合(自転車が右手方向に旋回する状態)には、負荷装置50の巻線53a〜巻線53dに、自転車を左手方向に旋回させるような回転磁界を生じさせる。
また、回動角度誤差信号の大きさの絶対値が大きくなる程、回動軸55を駆動する力(トルク)を大きくするような巻線制御信号Sdを発生させる。
具体的には、CPUの指令に従い演算制御部42が、巻線53a〜巻線53dに与える駆動電力の周波数、駆動電圧、または、駆動電流、もしくは、これらの2以上を同時に制御する。この際に、上述した周知技術である、一次電圧制御、周波数制御、V/f一定制御、ベクトル制御等が採用される。
【0062】
ステップST120〜ステップST122の処理はフィードバック処理であり、タイマー割込みごとに、ステップST120〜ステップST122の処理が繰り返されることによって、回動角度誤差信号は0に収束し、回動角度も0°に収束する。
【0063】
このようにして、ハンドルレバー10の回動量が0°とされ、前輪30は直進する向きに制御されて駐輪をする。負荷装置50を備えない場合には、荷物籠15に積載する荷物の重量が重くその重心位置が左右のいずれかの一方向にずれている場合に、前輪30が重心のずれている方向に回動し、その結果、自転車の全体の重量バランスが崩れて自転車が転倒することがある。しかしながら、負荷装置50を備え、ハンドルロック制御処理を採用する実施形態の自転車では、前輪30は直進する向きに維持されるので自転車が転倒する事態は生じない。特に、自転車のスタンドを用いて自立させ、重い荷物を両手で運び、荷物籠15に積載するに際して、常時、前輪30は直進する向きに維持されるので、自転車に手を触れないでも自転車の自立状態は維持される。
【0064】
(走行速度に応じたハンドル回動角速度制御処理・ハンドル回動量制限処理)
図9は、走行速度に応じたハンドル回動制限処理のフローチャートである。図9を参照して、ステップST15でおこなわれる走行速度に応じたハンドル回動角速度制御処理・ハンドル回動量制限処理について説明をする。ステップST150からステップST153までが、走行速度に応じたハンドル回動角速度制御処理であり、ステップST154からステップST155までが、走行速度に応じたハンドル回動量制限処理である。
【0065】
ステップST150では、CPUは現在の走行速度に対応する、所望の制限回動角速度をテーブルから読み出す。
現在の走行速度は、速度測定装置45から入力される速度信号SvをCPUが検出して得る。
所望の制限回動角速度が書き込まれているテーブルは、不揮発性メモリ、または、ROM(ロム)とされる。CPUはこれらから所望の制限回動角速度を得る。不揮発性メモリに、予め、所望の制限回動角速度を書き込むに際しては手動入力装置44が用いられる。
【0066】
ステップST151では、CPUは現在のハンドル回動角速度を演算する。
現在のハンドル回動角速度は、回動角度を時間微分して得られるが、実施形態では、CPUを用いる離散制御系とされているので、CPUが回動角度測定装置58から得られる回動角度信号Sa(現在のハンドル回動角度)から前回の割り込み処理において得た回動角度を引き算して時間差分を得て、これを時間微分に替えて用いる。
【0067】
ステップST152では、CPUは、|現在のハンドル回動角速度|>制限回動角速度か否かを判断する。
|現在のハンドル回動角速度|>制限回動角速度である場合(Yes)には処理はステップST153へ移動し、|現在のハンドル回動角速度|>制限回動角速度でない場合(No)には処理はステップST154へ移動する。つまり、|現在のハンドル回動角速度|が制限回動角度の範囲である場合には、負荷装置50は、なにもしないで、前輪30の負荷とならないように回転子54を自由に回転させる状態にしておく。
【0068】
ステップST153では、CPUは|現在のハンドル回動角速度|から制限回動角速度を引く差分信号を得る演算をおこない、|現在のハンドル回動角速度|を減少させる向きの極性を付してこの差分信号の大きさに応じた巻線制御信号Sdを出力する。
つまり、巻線駆動部41は、回転子54が現在回転している方向と反対側に回転する回転磁界を発生するように巻線53a〜巻線53dに電力を供給する。これによってハンドル回動角速度は減殺され、|現在のハンドル回動角速度|は制限回動角速度に近づく。そして、最終的にはハンドル回動角速度誤差信号の値を0にする方向に制御(フィードバック制御)がおこなわれるようにされている。
【0069】
ここで、現在の走行速度に対応する、所望の制限回動角速度をどのように決定するかであるが、自転車に乗る者の好みによって種々に決定することができる。制限回動角速度を小さく設定する場合には、急激なハンドル操作がし難くなる一方、外力、例えば、路面の凹凸によってハンドルが不安定に動くという事態の発生を軽減することができる。
【0070】
例えば、走行速度が遅い場合には、前輪30が振られやすく、切れ込みが発生し易くなるので、走行速度が遅い場合に、制限回動角速度を小さくして、急速なハンドル操作ができないようにすることを好む者は、このように設定することができる。例えば、走行速度が(800m/時)未満のときは制限回動角速度を(9°/秒)以内として、走行速度に比例して制限回動角速度を大きくし、または、走行速度が(800m/時)以上の場合には制限回動角速度を設けない等である。さらには、走行速度によらず制限回動角速度を一定値の比較的に小さな値とすることによっても同様の効果を得ることができる。
【0071】
一方、走行速度が遅い場合の前輪30の切れ込みにはあまり不安を感ぜず、むしろ、高速での急激なハンドル操作を危険防止の観点から好まない者は、走行速度が速い場合に、制限回動角速度を小さくする設定とすることができる。例えば、走行速度が(20km/時)以上のときは制限回動角速度を(45°/秒)以内とする等である。なお、所望の制限回動角速度の値を非常に大きく設定する場合には、ステップST153での処理は常にスキップされ、処理は、常にステップST152からステップST154へ移動することとなる。つまり、ハンドル回動角速度の制御はおこなわれないこととなる。
【0072】
ステップST154では、CPUは、|現在のハンドル回動量|>制限回動角度か否かを判断する。
CPUは、回動角度測定装置58からの回動角度信号Saを検出して現在のハンドル回動量(回動角度)を得る。
|現在のハンドル回動量|>制限回動角度である場合(Yes)には処理はステップST155へ移動し、|現在のハンドル回動量|>制限回動角度ではない場合(No)には処理は終了する。つまり、|現在のハンドル回動量|が制限回動角度の範囲であれば、負荷装置50は、なにもしないで、前輪30の負荷とならないように回転子54を自由に回転させる状態にしておく。
【0073】
ステップST155では、CPUは現在のハンドル回動量が正であればハンドル回動量を負方向とする所定の巻線制御信号を出力する。また、現在のハンドル回動量が負であればハンドル回動量を正方向とする所定の巻線制御信号を出力する。
このように巻線制御信号Sdの極性は定められ、ハンドル回動角度を所定の範囲に抑えるように負荷装置50は作用する。つまり、急激な前輪30の切れ込みが、ステップST155における処理で抑えられる。
【0074】
ここで、現在の走行速度に対応する、所望の制限回動角度をどのように決定するかであるが、自転車に乗る者の好みによって種々に決定することができる。例えば、走行速度が遅い場合には、前輪30が振られやすく、切れ込みが発生し易くなるので、走行速度が遅い場合に、制限回動角度を小さくすることを好む者は、このように設定することができる。例えば、走行速度が(800m/時)未満のときは制限回動角度を(30°)以内として、走行速度に比例して制限回動角度を大きくする等である。さらには、走行速度によらず制限回動角度を一定値、例えば60°に制限することもできる。
【0075】
一方、走行速度が遅い場合の前輪30の切れ込みにはあまり不安を感ぜず、むしろ、高速での大きな角度のハンドル操作を危険防止の観点から好まない者は、走行速度が速い場合に、制限回動角度を小さくする設定とすることができる。例えば、走行速度が(20km/時)以上のときは制限回動角速度を(45°)以内とする等である。なお、所望の制限回動角度の値を非常に大きく設定する場合には、ステップST155での処理は常にスキップされ、処理は、常にステップST154で終了して、ステップST16へ移動することとなる。つまり、ハンドル回動角度の制御はおこなわれないこととなる。
【0076】
(積載重量に応じたハンドル回動角速度制御処理・ハンドル回動量制限処理)
図10は、積載重量に応じたハンドル回動制限処理のフローチャートである。図10を参照して、ステップST16でおこなわれる積載量に応じたハンドル回動角速度制御処理・ハンドル回動量制限処理について説明をする。ステップST160からステップST163までが、積載量に応じたハンドル回動角速度制御処理であり、ステップST164からステップST165までが、積載量に応じたハンドル回動量制限処理である。
【0077】
ステップST160では、CPUは積載重量に対応する、所望の制限回動角速度をテーブルから読み出す。
積載重量は、積載量測定装置16(図2(a)を参照)から入力される積載量信号SwをCPUが検出して得る。また、積載量測定装置16a〜積載量測定装置16d(図2(b)を参照)のすべてから得られる信号を加算した和信号を積載量信号Swとして用いるようにしても良い。
所望の制限回動角速度が書き込まれているテーブルは、不揮発性メモリ、または、ROM(ロム)に配される。CPUはこれらから所望の制限回動角速度を得る。不揮発性メモリに、予め、所望の制限回動角速度を書き込むに際しては手動入力装置44が用いられる。
【0078】
ステップST161では、CPUは現在のハンドル回動角速度を演算する。
現在のハンドル回動角速度は、回動角度を時間微分して得られるが、実施形態では、CPUを用いる離散制御系とされているので、CPUが回動角度測定装置58から得られる回動角度信号Sa(現在のハンドル回動角度)から前回の割り込み処理において得た回動角度を引き算して時間差分を得て、これを時間微分に替えて用いる。
【0079】
ステップST162では、CPUは、|現在のハンドル回動角速度|>制限回動角速度か否かを判断する。
|現在のハンドル回動角速度|>制限回動角速度である場合(Yes)には処理はステップST163へ移動し、|現在のハンドル回動角速度|>制限回動角速度でない場合(No)には処理はステップST164へ移動する。つまり、|現在のハンドル回動角速度|が制限回動角度の範囲である場合には、負荷装置50は、なにもしないで、前輪30の負荷とならないように回転子54を自由に回転させる状態にしておく。
【0080】
ステップST163では、CPUは|現在のハンドル回動角速度|から制限回動角速度を引く差分信号を得る演算をおこない、|現在のハンドル回動角速度|を減少させる向きの極性を付してこの差分信号の大きさに応じた巻線制御信号Sdを出力する。
つまり、巻線駆動部41は、回転子54が現在回転している方向と反対側に回転する回転磁界を発生するように巻線53a〜巻線53dに電力を供給する。これによってハンドル回動角速度は減殺され、|現在のハンドル回動角速度|は制限回動角速度に近づく。
【0081】
ここで、積載重量に対応する、所望の制限回動角速度をどのように決定するかであるが、自転車に乗る者の好みによって種々に決定することができる。制限回動角速度を小さく設定する場合には、急激なハンドル操作がし難くなる一方、外力、例えば、路面の凹凸によってハンドルが不安定に動くという事態の発生を軽減することができる。
【0082】
例えば、積載重量が大きい場合には、前輪30が振られやすく、切れ込みが発生し易くなるので、積載重量が大きい場合に、制限回動角速度を小さくして、急速なハンドル操作ができないようにすることを好む者は、このように設定することができる。例えば、積載重量が(20kg)以上のときは制御回動角速度を(10°/秒)以内とする等である。また、積載重量に比例して制限回動角速度を小さくするようにしても良い。
【0083】
なお、所望の制限回動角速度の値を非常に大きく設定する場合には、ステップST163での処理は常にスキップされ、処理は、常にステップST162からステップST164へ移動することとなる。つまり、ハンドル回動角速度の制御はおこなわれないこととなる。
【0084】
ステップST164では、CPUは、|現在のハンドル回動量|>制限回動角度か否かを判断する。
CPUは、回動角度測定装置58からの回動角度信号Saを検出して現在のハンドル回動量(回動角度)を得る。
|現在のハンドル回動量|>制限回動角度である場合(Yes)には処理はステップST165へ移動し、|現在のハンドル回動量|>制限回動角度ではない場合(No)には処理は終了する。つまり、|現在のハンドル回動量|が制限回動角度の範囲であれば、負荷装置50は、なにもしないで、前輪30の負荷とならないように回転子54を自由に回転させる状態にしておく。
【0085】
ステップST165では、CPUは現在のハンドル回動量が正であればハンドル回動量を負方向とする所定の巻線制御信号を出力する。また、現在のハンドル回動量が負であればハンドル回動量を正方向とする所定の巻線制御信号を出力する。
このように巻線制御信号Sdの極性は定められ、ハンドル回動角度を所定の範囲に抑えるように負荷装置50は作用する。つまり、急激な前輪30の切れ込みが、ステップST165における処理で抑えられる。
そして、ステップST165の処理が終了すると、処理はステップST10へ移動する。
【0086】
ここで、積載重量に対応する、所望の制限回動角度をどのように決定するかであるが、自転車に乗る者の好みによって種々に決定することができる。例えば、積載重量が重い場合には、前輪30が振られやすく、切れ込みが発生し易くなるので、積載重量が重い程、制限回動角度を小さくすることを好む者は、このように設定することができる。例えば、積載重量が(20kg)以上のときは制限回動角度を(45°)以内とする等である。また、積載重量に比例して制限回動角度を小さくするようにしても良い。
【0087】
なお、所望の制限回動角度の値を非常に大きく設定する場合には、ステップST165での処理は常にスキップされ、処理は、常にステップST164で終了し、処理はステップST10へ移動することとなる。つまり、ハンドル回動角度の制御はおこなわれないこととなる。
【0088】
(ハンドル操作圧を一定とする制御処理)
図11は、ハンドル操作圧を一定とする制御処理のフローチャートである。図11を参照して、ステップST17でおこなわれるハンドル操作圧を一定とする制御処理について説明をする。
【0089】
ハンドルレバー10の操作に際して、荷物籠15に積載する荷物の重量、自転車の走行速度にかかわらず、一定の操作圧でハンドルレバー10を操作することができれば、自転車を操作する者は快適な操作感を得ることができる。また、走行路面が左右方向に傾いた面であるか否か、走行路面が走行方向に傾いた坂道であるか否か、走行路面がコンクリート面であるか、泥道であるか等の路面状況に関係なく、一定の操作圧でハンドルレバー10を操作することができれば、自転車を操作する者は快適な操作感を得ることができる。ハンドル操作圧を一定とする制御処理は、このような操作感を得ることができる処理である。
【0090】
ハンドル操作圧を一定とする制御処理をおこなうために、ハンドルレバー10と人体(例えば、掌)との間の圧力を検出するためのハンドル操作圧検出装置46と、左ハンドル操作圧検出器14Lと、右ハンドル操作圧検出器14Rとが設けられている。
【0091】
ステップST170では、CPUは手動入力装置44によって設定された所望のハンドル操作圧を読み出す。
所望のハンドル操作圧は個人の好みによる大きさに設定することができる。例えば、女性、高齢者が、比較的に小さな力でハンドルレバー10を操作することを好む場合には、手動入力装置44によって所望のハンドル操作圧を小さく設定する。例えば、100gに設定する。一方、ハンドルレバー10の感触が、ずっしりと重いことを好む場合には、手動入力装置44によって所望のハンドル操作圧を大きく設定する。例えば、500gに設定する。
【0092】
ステップST171では、CPUは所望のハンドル操作圧と現在のハンドル操作圧との差(ハンドル操作圧誤差信号)を演算する。
具体的には、CPUは、ハンドル操作圧検出装置46からのハンドル操作圧信号Shから現在のハンドル操作圧を得て、所望のハンドル操作圧から現在のハンドル操作圧を引き算して、ハンドル操作圧誤差信号を得る。
【0093】
ステップST172では、CPUはハンドル操作圧誤差信号に応じた信号を巻線制御信号Sdとして出力する。
ここで、不感帯を設け、ハンドル操作圧信号Shの絶対値が所定範囲内である場合には、CPUは、回転子54に駆動力を与える大きさの巻線制御信号Sdを出力しないようにする。例えば、不感帯の幅を±50gに設定し、所望のハンドル操作圧を100gに設定する場合には、ハンドル操作圧信号Shが±50gに対応する範囲内では負荷装置50の回転子54は自由に回動する。一方ハンドル操作圧信号Shが±50gに対応する範囲を超えた途端にハンドルレバー10が、100gの力で、回動させようとする方向と反対の方向に押し返してくる感触を掌が感じることとなる。不感帯の中の操作としては、積極的にハンドルレバー10を操作することなく、単に掌を左グリップ12L、右グリップ12Rに軽く触れている場合がある。このようにすれば、回転子54および前輪30は無駄な動きをすることがなく、また、無駄な電力を消費しない。
【0094】
ステップST170〜ステップST172までの処理はフィードバック処理であり、タイマー割込みごとに、ステップST170〜ステップST172の処理が繰り返されることによって、ハンドルレバー10を操作する者の掌に所望のハンドル操作圧を与えながら、所望の方向に前輪30の回動角度を制御することができる。
【0095】
負荷装置50を備えない自転車においては、例えば、泥道で走行方向の変更をおこなう場合にはコンクリート道で走行方向の変更をおこなう場合に比べて大きな力が必要とされるが、負荷装置50を備え、ハンドル操作圧を一定とする制御を採用する実施形態の自転車においては、泥道では人の手による回動力がアシストされるので容易に走行方向の変更をおこなうことができる。つまり、負荷装置50を備えることによって、路面状況に左右されることがない操作感を得ることができる。
【0096】
また、負荷装置50を備えない自転車においては、荷物籠15に長さが長い重量物を積載する場合には左右方向の重心のアンバランスによって、所謂、左右の重心の移動した側にハンドルが取られる現象が生じるが、負荷装置50を備え、ハンドル操作圧を一定とする制御を採用する実施形態の自転車においては、このような現象は生じない。
【0097】
また、左右の一方の側に傾いた斜面を走行する場合にも、傾いた一方の側にハンドルが取られる現象が生じるが、負荷装置50を備え、ハンドル操作圧を一定とする制御を採用する実施形態の自転車においては、このような現象は生じない。
【0098】
(荷物籠の積載物の重心位置に応じたハンドル回動制限処理)
荷物籠15に積載物を積載するに際して、積載物の重量の大きさに応じて自転車全体の重心位置が変化して、ハンドル操作性を損なうので、積載物の重量に応じたハンドル回動制限処理をおこないハンドル操作性を改善することについては既に述べた。しかしながら、積載物の重量のみならず、その積載物の荷物籠15における重心位置が前輪30(ハンドルレバー10)の回動特性に大きく影響を与える場合がある。
【0099】
例えば、積載物の重量は比較的小さくとも、積載物の重心位置が大きく右によっている場合には、前輪30が右方向に回動し易くなる。つまり、ハンドルが右に取られ易くなる。反対に積載物の重量は比較的小さくとも、積載物の重心位置が大きく左によっている場合には、ハンドルが左に取られ易くなる。また、積載物の重心位置が大きく前方によっている場合には、実際の積載物の重量以上にハンドルが右または左に取られ易くなる。このような場合にも安定した走行を可能にするのが、荷物籠の積載物の重心位置に応じたハンドル回動制限処理である。
【0100】
図12は、積載物の重心位置に応じたハンドル回動制限処理のフローチャートである。図12を参照して処理の内容について説明をする。図10に示す積載重量に応じたハンドル回動角速度制御処理・ハンドル回動量制限処理のフローチャートのステップST160の処理内容が、図12では、ステップST260で示す処理内容に変更されている点が、図10と図12とでは異なるので、この点について説明をする。
【0101】
ステップST260ではCPUは、以下の処理をおこなう。
CPUは、積載物の、前後の重心位置を表す第1係数を求め、左右の重心位置を表す第2係数を求める。
また、CPUは、積載重量に第1係数と第2係数を掛けて、これに対応する所望の制限回動角速度をテーブルから読み出す。
【0102】
積載物の、前後の重心位置を表す第1係数、左右の重心位置を表す第2係数について説明をする。第1係数、第2係数を求めるに際しては、図2(b)に示す積載量測定装置16a〜積載量測定装置16aが用いられる。CPUに入力される積載量信号Swには、この場合には、積載量測定装置16aから得られる積載量信号Swa、積載量測定装置16bから得られる積載量信号Swb、積載量測定装置16cから得られる積載量信号Swc、積載量測定装置16dから得られる積載量信号Swd の各々が含まれる。
【0103】
第1係数は以下の式で得られる。
第1係数=1
ただし(Swa+Swb)/(Swa+Swb)<1の場合
第1係数={1+(Swa+Swb)/(Swa+Swb)}
ただし(Swa+Swb)/(Swa+Swb)>1の場合、また、第1係数の値は2以上の場合は、例えば、2とする。
【0104】
第2係数は以下の式で得られる。
第2係数={1+(Swa+Swc)/(Swb+Swd)}、
または、{1+(Swb+Swd)/(Swa+Swc)}のいずれかの値が大きい方。
また、第2係数の値は3以上の場合は、例えば、3とする。
【0105】
第1係数が大きいことは、自転車全体の重心の位置が、より前方に移動することであるので、前輪30(ハンドルレバー10)は切れ込みを生じ易くなる。また、第2係数は左右のいずれかに重心が移動した場合に大きくなる係数であり、第2係数が大きいことは、重心の位置が左右に移動することであるので、前輪30(ハンドルレバー10)は切れ込みを生じ易くなる。このように、第1係数、第2係数の値が大きくなる場合には、実際の重量に比べてより大きな重量を積載したと同様の効果が生じる。
【0106】
そこで、以下のように実際の重量に第1係数と第2係数を掛けた得られた値が切れ込みに影響を与える重量と見なしている。ここで、第1係数の値の上限を2とし、第2係数の値を3とするのは、補正のための第1係数、第2係数の値が過大になりすぎるのを防止するためである。上限値である、2、3は、実験によって、自転車の特性に合わせて他の値とすることができる。
【0107】
切れ込みに影響を与える重量=実際の重量×第1係数×第2係数
【0108】
なお、実際の重量は、以下の式で求められる。
実際の重量=Swa+Swc+Swb+Swd
【0109】
このようにして、実際の重量を上述した補正式によって補正して、切れ込みに影響を与える重量に対応する制限回動角速度をテーブルから読み出すことによって、回動制限処理の効果をより良好なものとできる。この補正式は、一例に過ぎず、実験によって、個々の自転車ごとに、最も良好な効果が得られる他の式を用いても良い。
【0110】
実施形態の自転車は、フレーム固定部に対して回動する前輪とこの前輪に連結されたハンドルレバーとの回動軸に対して回動力を付与するためにフレーム固定部に固着される負荷装置をそなえている。また、負荷装置が発生する回動力の大きさを求め、負荷装置が該回動力を発生するように制御する演算制御部を備えている。
【0111】
この負荷装置を備える実施形態の自転車の技術は、通常の自転車であっても、アシスト自転車であっても、電動二輪車であっても実施が可能である。また、負荷装置としては、発生するトルク量が調整できる機構であれば、誘導電動機のみならず、直流電動機、同期機等も使用することが可能である。また、制御演算部でおこなう制御演算に関しては、上述した演算則は、一実施例であり、単に回動角速度をフィードバックする制御、自転車の走行状態に応じた種々の制御、積載物の重量に応じた種々の制御等、広範囲な制御の演算則を採用することができる。
【0112】
実施形態の自転車は、自転車の構造を変えることなく、自転車のハンドル操作性を制御する機能を有するものである。例えば、自転車の駐停車時においてはハンドルの自由回動を阻止するハンドル操作特性とすることができ、自転車の走行時においては、自転車の走行速度、籠に積載する荷物またはチャイルドシートに乗車する子供の重量に応じて切れ込み特性を制御することができる。そして、前輪が必要以上に切られてしまい、駐停車時に転倒し、走行時に操作性が低減してしまう事態が生じることを防止できる。さらに、高速走行時において安全な操作が可能となる。
【符号の説明】
【0113】
1 自転車、 10 ハンドルレバー、 11L 左ブレーキレバー、 11R 右ブレーキレバー、 12L 左グリップ、 12R 右グリップ、 13 ベル、 14L 左ハンドル操作圧検出器、 14R 右ハンドル操作圧検出器、 15 荷物籠、 16、16a、16b、16c、16d 積載量測定装置、 17 荷物籠取付板、 20 ステム、 21 ステム回動軸、 22、24 カップリング装置、 23a、23b、25a、25b ビス、 26 フォークブレード、 27 ダウンチューブ、 28 シートチューブ、 29 サドル、 30 前輪、 31 後輪、 33 ペダル、 34 シートスティブリッジ、 35 チェンスティ、 36 電動モータ部、 37 チェン、 38 スプロケット、 41 巻線駆動部、 42 演算制御部、 44 手動入力装置、 45 速度測定装置、 46 ハンドル操作圧検出装置、
50 負荷装置、 51 磁気枠部、 52a、52b、52c、52d 磁気鉄心、 53a、53b、53c、53d 巻線、 54 回転子、 55、55a、55b 回動軸、 56a、56b 取付部、 58 回動角度測定装置、 58a 回動角度測定装置固定部、 58b 回動角度測定装置回動部
【特許請求の範囲】
【請求項1】
フレーム固定部に対して回動する前輪と該前輪に連結されたハンドルレバーとの回動軸に対して回動力を付与するために該フレーム固定部に配される負荷装置と、
前記負荷装置が発生する所望回動力の大きさを求め、該負荷装置が該所望回動力を発生するように制御する演算制御部と、
を備える自転車。
【請求項2】
前記回動軸と共に回動し、積載物の重量を検出する荷物籠を備え、
前記演算制御部は、
前記荷物籠に積載する積載物の重量に応じた回動力を求め、前記負荷装置が該回動力を発生するように制御する、請求項1に記載の自転車。
【請求項3】
前記回動軸と共に回動し、積載物の重量を検出する荷物籠を備え、
前記演算制御部は、
前記荷物籠に積載する積載物の重量と走行速度とに応じた回動力を求め、前記負荷装置が該回動力を発生するように制御する、請求項1に記載の自転車。
【請求項4】
さらに、前記荷物籠に積載する積載物の重心位置に応じた大きさの回動力を求め、前記負荷装置が該回動力を発生するように制御する、請求項2または請求項3に記載の自転車。
【請求項5】
前記回動軸と共に回動し、積載物の重量を検出する荷物籠を備え、
前記演算制御部は、
前記荷物籠に積載する積載物の重量に応じて前記回動軸の回動角度範囲を求め、該回動角度範囲に該回転軸の回動力を維持するように前記負荷装置が回動力を発生するように制御する、請求項1に記載の自転車。
【請求項6】
手動入力装置を備え、
前記演算制御部は、
前記手動入力装置からの操作によって、前記回動角度をゼロ度に保つ駐輪モードを選択することができる、請求項1に記載の自転車。
【請求項1】
フレーム固定部に対して回動する前輪と該前輪に連結されたハンドルレバーとの回動軸に対して回動力を付与するために該フレーム固定部に配される負荷装置と、
前記負荷装置が発生する所望回動力の大きさを求め、該負荷装置が該所望回動力を発生するように制御する演算制御部と、
を備える自転車。
【請求項2】
前記回動軸と共に回動し、積載物の重量を検出する荷物籠を備え、
前記演算制御部は、
前記荷物籠に積載する積載物の重量に応じた回動力を求め、前記負荷装置が該回動力を発生するように制御する、請求項1に記載の自転車。
【請求項3】
前記回動軸と共に回動し、積載物の重量を検出する荷物籠を備え、
前記演算制御部は、
前記荷物籠に積載する積載物の重量と走行速度とに応じた回動力を求め、前記負荷装置が該回動力を発生するように制御する、請求項1に記載の自転車。
【請求項4】
さらに、前記荷物籠に積載する積載物の重心位置に応じた大きさの回動力を求め、前記負荷装置が該回動力を発生するように制御する、請求項2または請求項3に記載の自転車。
【請求項5】
前記回動軸と共に回動し、積載物の重量を検出する荷物籠を備え、
前記演算制御部は、
前記荷物籠に積載する積載物の重量に応じて前記回動軸の回動角度範囲を求め、該回動角度範囲に該回転軸の回動力を維持するように前記負荷装置が回動力を発生するように制御する、請求項1に記載の自転車。
【請求項6】
手動入力装置を備え、
前記演算制御部は、
前記手動入力装置からの操作によって、前記回動角度をゼロ度に保つ駐輪モードを選択することができる、請求項1に記載の自転車。
【図1】



【図2】
【図3】

【図4】
【図5】

【図6】
【図7】

【図8】

【図9】
【図10】

【図11】
【図12】
【図13】
【図14】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2011−5935(P2011−5935A)
【公開日】平成23年1月13日(2011.1.13)
【国際特許分類】
【出願番号】特願2009−150734(P2009−150734)
【出願日】平成21年6月25日(2009.6.25)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
【公開日】平成23年1月13日(2011.1.13)
【国際特許分類】
【出願日】平成21年6月25日(2009.6.25)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
[ Back to top ]