
航法支援装置
【課題】本発明は、複数のフィルタを併用することにより目標の位置、距離、速度、方位の何れかを得る航法支援装置に関し、構成が大幅に複雑化することなく、精度を高めることを目的とする。
【解決手段】目標から到来した受信波に基づいて前記目標の位置、距離、速度、方位の全てまたは一部の予測および推定を個別に行う複数N個のフィルタと、前記目標の特徴を得る特徴識別手段と、前記複数N個のフィルタ毎に特性が前記特徴に整合するほど値が大きく、かつ前記複数Nのフィルタに個別に対応する重みW1〜WNを設定する重み設定手段と、前記複数のフィルタによって行われた推定の結果と前記重みW1〜WNとの積和として前記目標の位置、距離、速度、方位の全てまたは一部を得る重み付け手段とを備える。
【解決手段】目標から到来した受信波に基づいて前記目標の位置、距離、速度、方位の全てまたは一部の予測および推定を個別に行う複数N個のフィルタと、前記目標の特徴を得る特徴識別手段と、前記複数N個のフィルタ毎に特性が前記特徴に整合するほど値が大きく、かつ前記複数Nのフィルタに個別に対応する重みW1〜WNを設定する重み設定手段と、前記複数のフィルタによって行われた推定の結果と前記重みW1〜WNとの積和として前記目標の位置、距離、速度、方位の全てまたは一部を得る重み付け手段とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数のフィルタを併用することにより目標の位置、距離、速度、方位の何れかを得る航法支援装置に関する。
【背景技術】
【0002】
近年、複数の目標を並行して個別に追尾する機能をもつ船舶レーダ、VTS等の装置には、衝突事故等の防止の高い確度のさらなる向上を目的として、目標毎に計測される位置や速度の精度の向上が強く要求されつつある。
従来、レーダ等のセンサから得られ、かつ観測誤差を含んだ観測位置から目標の位置や速度を推定するために適用可能な手法としては、αβフィルタ、カルマンフィルタが知られている。また、複数の異なる特性のフィルタが併用されることにより、目標が自ら動きを変える場合であっても位置や速度の精度の向上を図る航法支援装置も実現されている。
【0003】
なお、本発明に関連した先行技術としては、例えば、以下に列記する特許文献1、2および非特許文献1に開示される技術があった。
(1) 「複数の異なる特性のフィルタによる目標の位置、速度の推定結果を重み付け加算し目標の位置や速度を推定する」点に特徴がある多目的追尾方法およびその装置…特許文献1
【0004】
(2) 「複数の異なる特性のフィルタによる目標の位置、速度の推定結果の内の1つを選択し目標の推定位置、推定速度を算出する」点に特徴がある船舶用運動予測方式…特許文献2
(3) 「上記重み付け加算に適用される重みがフィルタ毎に得られた推定の誤差が小さいほど大きく設定される」点に特徴がある"Estimation and Tracking"…非特許文献1
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平04−113290号公報
【特許文献2】特許2595225号公報
【非特許文献】
【0006】
【非特許文献1】"Estimation and Tracking :Principles, Techniques, and Software" P417〜P491 ISBN:9780890066430
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、上述した従来例においては、複数のフィルタによって行われた推定の結果が切り替えられて用いられるか、重み付けされて用いられるかは、例えば、以下の事項の何れか一方に基づいて決定され、このような決定には、目標の運動特性の推定を可能とする他の目標の特徴情報は用いられていなかった。
【0008】
(1) 時系列の順に先行して得られた目標の観測位置の列に基づいて算出可能なその目標の推定速度
(2) 異なる複数のフィルタによって求められた目標の予測位置と、このような目標の位置の観測値との差の累積
【0009】
また、目標の観測位置を元に上記複数のフィルタの推定結果の切り替え、あるいは重み付けが決定されるために、自船の動揺等により観測位置に大きな誤差が突発的に発生した場合には、これらの複数のフィルタの推定結果の切り替えや重み付けに誤りが生じ、位置および速度の推定の精度が劣化する可能性があった。
【0010】
さらに、このような切り替えや重み付けの対象となる推定結果が「慣性運動が強く作用する大型船の追尾に適したフィルタ」によって与えられる場合には、小回りが効き頻繁に旋回を行う小型船の推定位置や速度は、その小型船の実際の位置や速度の変化に対して遅れて追尾される可能性が高かった。
【0011】
本発明は、従来例に比べて構成が大幅に複雑化することなく、目標の位置や速度の推定の精度を高めることができる航法支援装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
請求項1に記載の発明では、複数N個のフィルタは、目標から到来した受信波に基づいて前記目標の位置、距離、速度、方位の全てまたは一部の予測および推定を個別に行う。特徴識別手段は、前記目標の特徴を得る。重み設定手段は、前記複数N個のフィルタ毎に特性が前記特徴に整合するほど値が大きく、かつ前記複数Nのフィルタに個別に対応する重みW1〜WNを設定する。重み付け手段は、前記複数のフィルタによって行われた推定の結果と前記重みW1〜WNとの積和として前記目標の位置、距離、速度、方位の全てまたは一部を得る。
【0013】
すなわち、複数N個のフィルタによって行われた推定の結果は、単に合成されるのではなく、目標の特徴に適した特性を有するフィルタによって得られた推定の結果ほど、大きく重み付けられて合成される。
【0014】
請求項2に記載の発明では、請求項1に記載の航法支援装置において、前記目標の地理的なサイズが前記目標の特徴として得られる。
このような地理的なサイズは、一般に、大きな目標ほど、位置、距離、速度、方位の何れもが頻繁に変化する可能性が低く、かつ目標から到来した受信波に基づいて容易に識別可能であるため、複数N個のフィルタの内、推定の結果が大きく重み付けられるべきフィルタの識別の基準となる。
【0015】
請求項3に記載の発明では、請求項1に記載の航法支援装置において、前記目標の距離が前記目標の特徴として得られる。
このような距離は、一般に、遠い目標ほど、その目標の動揺等に起因して位置、距離、速度、方位の何れにも大きな誤差を伴う可能性が高いため、複数N個のフィルタの内、推定の結果が大きく重み付けられるべきフィルタの識別の基準となる。
【0016】
請求項4に記載の発明では、請求項1に記載の航法支援装置において、前記受信波に含まれるドップラ周波数、または前記ドップラ周波数の分布が前記目標の特徴として与えられる。
このようなドップラ周波数は、一般に、変動が大きいほど、該当する目標の位置、距離、速度、方位の何れもが頻繁に変化する可能性が高いため、複数N個のフィルタの内、推定の結果が大きく重み付けられるべきフィルタの識別の基準となる。
【発明の効果】
【0017】
本発明によれば、従来例に比べて構成が大幅に複雑化することなく、目標の位置、距離、速度、方位の何れもが精度よく安定に得られる。
【0018】
また、本発明によれば、重み設定手段によって行われる処理が煩雑となったり、その処理に必要な処理量が大幅に増加することなく、目標の位置、距離、速度、方位の何れの精度も高められ、かつ安定に高く維持される。
【0019】
したがって、本発明が適用された航法装置や航法系では、所望の目標の識別や追尾が精度よく安定に、かつ安価に実現され、さらに、複数のフィルタに適用された航法、これらのフィルタの特性および組み合わせに対する柔軟な適応が可能となる。
【図面の簡単な説明】
【0020】
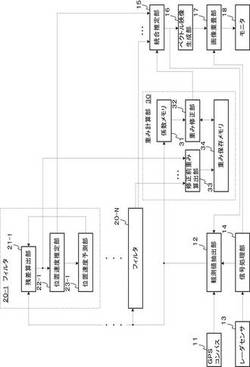
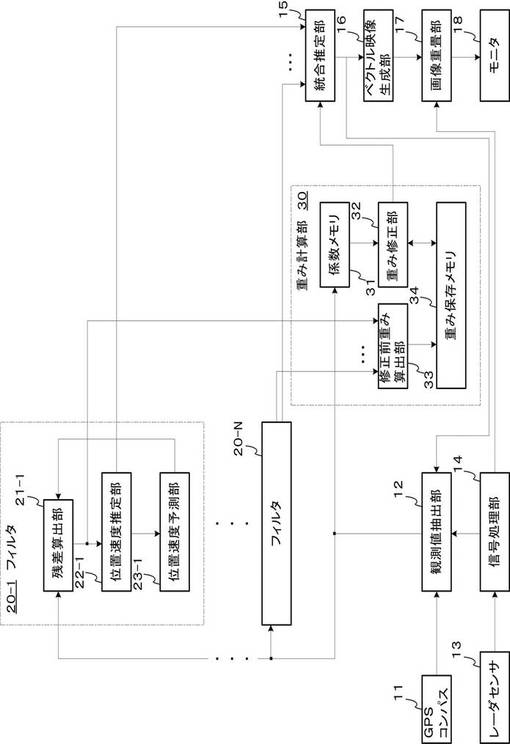
【図1】本発明の一実施形態の構成を示す図である。
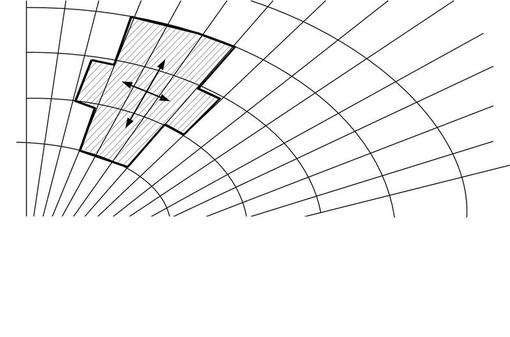
【図2】像の固まり毎の地理的な大きさの推定を説明する図である。
【発明を実施するための形態】
【0021】
以下、図面に基づいて本発明の実施形態について詳細に説明する。
図1は、本発明の一実施形態の構成を示す図である。
以下、図面に基づいて本発明の実施形態について詳細に説明する。
【0022】
図において、GPSコンパス11の出力は観測値抽出部12の第一の入力に接続され、レーダセンサ13の出力は信号処理部14の入力に接続される。信号処理部14の第一の出力は観測値抽出部12の第二の入力に接続され、その観測値抽出部12の出力は、フィルタ20-1〜20-Nの入力と、重み計算部30の第一の入力とに接続される。フィルタ20-1〜20-Nの第一の出力は重み計算部30の第二ないし第(N+1)の入力に接続され、その重み計算部30の出力は統合推定部15の第一の入力に接続される。フィルタ20-1〜20-Nの第二の出力は統合推定部15の第二ないし第(N+1)の入力に接続され、その統合推定部15の出力は観測値抽出部12の第三の入力およびベクトル映像生成部16の入力に接続される。ベクトル映像生成部16の出力と信号処理部14の出力とは画像重畳部17の第一および第二の入力にそれぞれ接続され、その画像重畳部17の出力はモニタ18の入力に接続される。
【0023】
フィルタ20-1は、以下の要素から構成される。
(1) 観測値抽出部12の出力に接続された第一の入力を有し、かつ出力が既述の重み計算部30の対応する入力に接続された残差算出部21-1
【0024】
(2) 入力が上記重み計算部30の対応する入力および残差算出部21-1の出力に接続され、かつ出力が既述の統合推定部15の対応する入力に接続された第一の出力を有する位置速度推定部22-1
(3) その位置速度推定部22-1の第二の出力に縦続接続され、かつ出力が残差算出部21-1の第二の入力に接続された位置速度予測部23-1
【0025】
なお、フィルタ20-2〜20-Nの構成については、フィルタ20-1の構成と同じであるので、以下では、機能および構成が同じ構成要素に、添え番号「1」に代わる添え番号「2」〜「N」が付加された同じ符号を付与し、ここでは、説明および図示を省略する。
【0026】
重み計算部30は、以下の要素から構成される。
(1) 観測値抽出部12の出力に縦続接続された係数メモリ31
(2) 係数メモリ31の出力に縦続接続され、かつ出力が統合推定部15の対応する入力に接続された重み修正部32
【0027】
(3) フィルタ15-1〜15-Nの第二の出力に個別に接続されたN個の入力を有する修正前重み算出部33
(4) 上記重み修正部33の出力と、重み修正部32の対応する入力との間に配置された重み保存メモリ34
【0028】
以下、図1を参照して本実施形態の動作を説明する。
信号処理部14は、レーダセンサ13から得られた相対距離と相対方位とで表される位置毎の電磁波の強度に対して距離補正、干渉除去処理などを行い、2次元のレーダ映像を生成する。
【0029】
観測値抽出部12は、最新のスキャン(以下、「今回のスキャン」という。)で得られたレーダ映像を像の固まりごとに分類して番号付けし、像の固まり毎に、その観測位置および、像の地理的な大きさの推定値を観測値として求める。
【0030】
ここに、像の固まり毎の観測位置は、像の重心位置までの相対距離、相対方位と、GPSコンパス11から得られた自船緯度経度と、自船船首方向とに基づいて求められた対地位置として与えられる。
【0031】
また、像の固まり毎の地理的な大きさの推定値は、像を構成する強度データの数だけではなく、例えば、図2に2つの矢印で示すように、像の重心位置における1つの強度データが示す距離(レンジ)方向の長さと、方位(スキャン)方向の長さとの積として与えられる。
【0032】
さらに、観測値抽出部12は、追尾中の目標毎に、今回スキャンの目標の予測位置と今回得られた観測位置との相関をとることにより、最も相関の高い像の観測値を今回の当該目標の観測値とする。
【0033】
フィルタ20-1〜20-Nの各部は、後述するように連係することにより、追尾の対象である目標毎に下記の処理を行う。
【0034】
なお、以下では、フィルタ20-1〜-20-Nに共通の事項については、添え番号「1」〜「N」に代えて、これらの添え番号「1」〜「N」の何れにも該当し得ることを示す添え文字「C」を用いて記載する。
【0035】
位置速度予測部23-Cは、前回のスキャン時に位置速度推定部22-Cによって計算された目標の位置、速度から今回のスキャンにおける目標の予測位置、速度を、指定運動モデルに基づいて予測する。
【0036】
残差算出部21-Cは、このようにして予測された今回のスキャンにおける目標の予測位置と、観測値抽出部12によって(像の固まり毎に)求められた目標の観測位置とを比較し、これらの予測位置と観測位置との差を位置残差として求める。さらに、残差算出部21-Cは、このようにして求められた位置残差の移動平均(以下、「残差平均」という。)を求めて保存する。
【0037】
位置速度推定部22-Cは、位置速度予測部23-Cによって予測された今回スキャンの目標の予測位置および速度に、それぞれ残差算出部21-Cによって求められた位置残差と所定のゲインとの積を加えることにより、目標の推定位置および速度の推定値を更新する。
【0038】
重み計算部30の各部は、以下の通りに連係することにより、目標毎に下記の処理を行う。
係数メモリ31には、フィルタ20-1〜20-Nの構成や特性にそれぞれに適し、かつ目標の地理的な大きさ(の推定値)に適した値として設定された重み修正係数の系列が予め格納される。
【0039】
修正前重み算出部33は、フィルタ20-1〜20-N(残差算出部21-1〜21-N)によって並行して求められたN個の残差平均を個別に参照し、該当する残差平均が小さいほど大きな値として対応するフィルタに適用されるべき「修正前重み」を算出し、重み保存メモリ34に保存する。
【0040】
重み修正部32は、以下の処理を行う。
(1) 観測値抽出部12によって求められた目標の地理的な大きさの推定値に応じて係数メモリ31を参照することにより重み補正係数を求める。なお、このような重み補正係数は、フィルタ20-1〜20-Nにそれぞれ対応した重み修正係数の系列の総和が「1」となる値に正規化されてもよい。
【0041】
(2) このような重み修正係数と、フィルタ20-1〜20-Nに個別に対応して重み保存メモリ34に保存されている「修正前重み」との積をとり、かつ総和を「1」とする正規化の処理を施すことにより、これらのフィルタ20-1〜20-Nに対応した重みW1〜WNを求める。
【0042】
統合推定部15は、フィルタ20-1〜20-N(位置速度推定部22-1〜22-N)によって推定されたN個の目標の位置と速度とのそれぞれについて、上記重みW1〜WNとの積和をとることにより、今回スキャンに基づく推定値として目標の位置および速度を求める。
【0043】
ベクトル映像生成部16は、今回スキャンに基づく推定値として求められた個々の目標の位置および速度から、対応する目標を示す画像(以下、「目標画像」という。)を生成する。画像重畳部17は、既述の通りに信号処理部14によって生成されたレーダ映像に、上記目標画像を重畳してモニタ18に引き渡す。
【0044】
このように本実施形態によれば、個々の目標の位置や速度は、複数の異なるフィルタ20-1〜20-N毎に、個別に行われた予測の誤差が小さく、かつ該当する目標の地理的なサイズが大きいほど安定性を重視したフィルタの重みが大きくなるような値に設定された重みW1〜WNと、これらのフィルタ20-1〜20-Nによって行われた推定の結果との積和として求められる。
【0045】
したがって、フィルタ20-1〜20-Nの構成や特性が目標の特徴に応じて有効に活用されることにより、追尾の対象となる目標の振る舞い、移動の形態その他の特徴の違いに起因する大きな誤差が生じることなく、しかも、従来例に比べて構成が大幅に複雑化することなく、所望の目標の追尾が安定に精度よく実現される。
【0046】
なお、本実施形態では、目標の位置および速度のみの精度の向上が本発明によって図られている。
しかし、本発明は、フィルタ20-1〜20-Nによって行われる予測および推定の対象が目標の位置、速度(移動の方向を含む。)、距離および方位の全てまたは一部であるならば、これらの位置、速度、距離および方位を精度よく得るためにも、同様に適用可能である。
【0047】
また、本実施形態では、上記目標の特徴として、目標の地理的なサイズのみが参照されている。
しかし、このような目標の特徴は、例えば、以下に列記する項目の何れか1つと、任意の組み合わせとの何れであってもよい。
【0048】
(1) 目標の距離
目標の距離は、遠いほど自船の動揺等に起因して目標の位置に大きく生じる可能性がある誤差の緩和を図る必要があるため、フィルタ20-1〜20-Nによって個別に得られた推定の結果に対する重み付けの基準として用いることができる。
【0049】
(2) 目標から到来した受信波のドップラ周波数、またはそのドップラ周波数の分布(変動幅)
上記ドップラ周波数およびその分布(変動幅)は、小さいほどその目標の相対的な位置、速度、距離および方位が頻繁には変化していないことを意味するため、フィルタ20-1〜20-Nによって個別に得られた推定の結果に対する重み付けの基準として用いることができる。
【0050】
また、フィルタ20-1〜20-Nによって個別に得られた推定の結果に対する重み付けの基準は、これらのフィルタ20-1〜20-Nの特性だけではなく、例えば、位置や速度の予測および推定を実現する処理のアルゴリズム、その処理の過程で用いられるパラメータの内容、形式その他の如何なるものであってもよい。
【0051】
さらに、本発明に係る航法支援装置は、位置、速度、距離、方位の何れかが求められた目標の追尾や自動操舵(操縦)を実現する多様な航法応用系に適用可能である。
【0052】
また、これらの位置、速度、距離、方向が求められるべき目標については、数は「1」であってもよく、かつ位置するレンジは如何なるものであってもよい。
【0053】
さらに、本実施形態では、像の固まり毎の観測位置を絶対的な対地位置として得るための基準となる自船緯度経度がGPSコンパス11によって得られている。
しかし、このような自船緯度経度は、自立航法や多様な無線航法に基づいてが備えられてもよく、あるいは図示されない操作部を介してユーザによって手動で設定されてもよい。
【0054】
また、本実施形態では、目標の相対距離や相対方向がレーダセンサ13によって直接与えられている。
しかし、このような目標の相対距離や相対方向は、例えば、目標から到来した受信波に施された所定の信号処理の下で与えられ、あるいはこのような目標の移動を模擬するシミュレータによって与えられてもよく、さらに、これらの信号処理や模擬の結果が蓄積された記憶装置によって与えられてもよい。
【0055】
さらに、本実施形態に係る航法支援装置は、船舶に搭載され、かつ他船の追尾を行う航法系や自動操舵系と連係しているが、例えば、航空機その他の多様な移動体に搭載されることによって、所望の目標の位置、速度、距離、方位を求めるためにも、同様に適用可能である。
【0056】
また、本実施形態の構成は、図1に示す構成に限定されず、所望の応答性や実時間性が損なわれることなく、既述の処理と同等または等価な処理が実現されるならば、これらの処理の全てまたは一部は、多様な情報処理装置やDSPが実行するソフトウェアによって如何なる機能分散あるいは負荷分散の下で実現されてもよい。
さらに、本発明は、上述した実施形態に限定されず、本発明の範囲において多様な実施形態の構成が可能であり、構成要素の全てまたは一部に如何なる改良が施されてもよい。
【符号の説明】
【0057】
11 GPSコンパス
12 測定値抽出部
13 レーダセンサ
14 信号処理部
15 統合推定部
16 ベクトル映像生成部
17 画像重畳部
18 モニタ
20 フィルタ
21 残差算出部
22 位置速度推定部
23 位置速度予測部
30 重み計算部
31 係数メモリ
32 重み修正部32
33 修正前重み算出部
34 重み保存メモリ
【技術分野】
【0001】
本発明は、複数のフィルタを併用することにより目標の位置、距離、速度、方位の何れかを得る航法支援装置に関する。
【背景技術】
【0002】
近年、複数の目標を並行して個別に追尾する機能をもつ船舶レーダ、VTS等の装置には、衝突事故等の防止の高い確度のさらなる向上を目的として、目標毎に計測される位置や速度の精度の向上が強く要求されつつある。
従来、レーダ等のセンサから得られ、かつ観測誤差を含んだ観測位置から目標の位置や速度を推定するために適用可能な手法としては、αβフィルタ、カルマンフィルタが知られている。また、複数の異なる特性のフィルタが併用されることにより、目標が自ら動きを変える場合であっても位置や速度の精度の向上を図る航法支援装置も実現されている。
【0003】
なお、本発明に関連した先行技術としては、例えば、以下に列記する特許文献1、2および非特許文献1に開示される技術があった。
(1) 「複数の異なる特性のフィルタによる目標の位置、速度の推定結果を重み付け加算し目標の位置や速度を推定する」点に特徴がある多目的追尾方法およびその装置…特許文献1
【0004】
(2) 「複数の異なる特性のフィルタによる目標の位置、速度の推定結果の内の1つを選択し目標の推定位置、推定速度を算出する」点に特徴がある船舶用運動予測方式…特許文献2
(3) 「上記重み付け加算に適用される重みがフィルタ毎に得られた推定の誤差が小さいほど大きく設定される」点に特徴がある"Estimation and Tracking"…非特許文献1
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平04−113290号公報
【特許文献2】特許2595225号公報
【非特許文献】
【0006】
【非特許文献1】"Estimation and Tracking :Principles, Techniques, and Software" P417〜P491 ISBN:9780890066430
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、上述した従来例においては、複数のフィルタによって行われた推定の結果が切り替えられて用いられるか、重み付けされて用いられるかは、例えば、以下の事項の何れか一方に基づいて決定され、このような決定には、目標の運動特性の推定を可能とする他の目標の特徴情報は用いられていなかった。
【0008】
(1) 時系列の順に先行して得られた目標の観測位置の列に基づいて算出可能なその目標の推定速度
(2) 異なる複数のフィルタによって求められた目標の予測位置と、このような目標の位置の観測値との差の累積
【0009】
また、目標の観測位置を元に上記複数のフィルタの推定結果の切り替え、あるいは重み付けが決定されるために、自船の動揺等により観測位置に大きな誤差が突発的に発生した場合には、これらの複数のフィルタの推定結果の切り替えや重み付けに誤りが生じ、位置および速度の推定の精度が劣化する可能性があった。
【0010】
さらに、このような切り替えや重み付けの対象となる推定結果が「慣性運動が強く作用する大型船の追尾に適したフィルタ」によって与えられる場合には、小回りが効き頻繁に旋回を行う小型船の推定位置や速度は、その小型船の実際の位置や速度の変化に対して遅れて追尾される可能性が高かった。
【0011】
本発明は、従来例に比べて構成が大幅に複雑化することなく、目標の位置や速度の推定の精度を高めることができる航法支援装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
請求項1に記載の発明では、複数N個のフィルタは、目標から到来した受信波に基づいて前記目標の位置、距離、速度、方位の全てまたは一部の予測および推定を個別に行う。特徴識別手段は、前記目標の特徴を得る。重み設定手段は、前記複数N個のフィルタ毎に特性が前記特徴に整合するほど値が大きく、かつ前記複数Nのフィルタに個別に対応する重みW1〜WNを設定する。重み付け手段は、前記複数のフィルタによって行われた推定の結果と前記重みW1〜WNとの積和として前記目標の位置、距離、速度、方位の全てまたは一部を得る。
【0013】
すなわち、複数N個のフィルタによって行われた推定の結果は、単に合成されるのではなく、目標の特徴に適した特性を有するフィルタによって得られた推定の結果ほど、大きく重み付けられて合成される。
【0014】
請求項2に記載の発明では、請求項1に記載の航法支援装置において、前記目標の地理的なサイズが前記目標の特徴として得られる。
このような地理的なサイズは、一般に、大きな目標ほど、位置、距離、速度、方位の何れもが頻繁に変化する可能性が低く、かつ目標から到来した受信波に基づいて容易に識別可能であるため、複数N個のフィルタの内、推定の結果が大きく重み付けられるべきフィルタの識別の基準となる。
【0015】
請求項3に記載の発明では、請求項1に記載の航法支援装置において、前記目標の距離が前記目標の特徴として得られる。
このような距離は、一般に、遠い目標ほど、その目標の動揺等に起因して位置、距離、速度、方位の何れにも大きな誤差を伴う可能性が高いため、複数N個のフィルタの内、推定の結果が大きく重み付けられるべきフィルタの識別の基準となる。
【0016】
請求項4に記載の発明では、請求項1に記載の航法支援装置において、前記受信波に含まれるドップラ周波数、または前記ドップラ周波数の分布が前記目標の特徴として与えられる。
このようなドップラ周波数は、一般に、変動が大きいほど、該当する目標の位置、距離、速度、方位の何れもが頻繁に変化する可能性が高いため、複数N個のフィルタの内、推定の結果が大きく重み付けられるべきフィルタの識別の基準となる。
【発明の効果】
【0017】
本発明によれば、従来例に比べて構成が大幅に複雑化することなく、目標の位置、距離、速度、方位の何れもが精度よく安定に得られる。
【0018】
また、本発明によれば、重み設定手段によって行われる処理が煩雑となったり、その処理に必要な処理量が大幅に増加することなく、目標の位置、距離、速度、方位の何れの精度も高められ、かつ安定に高く維持される。
【0019】
したがって、本発明が適用された航法装置や航法系では、所望の目標の識別や追尾が精度よく安定に、かつ安価に実現され、さらに、複数のフィルタに適用された航法、これらのフィルタの特性および組み合わせに対する柔軟な適応が可能となる。
【図面の簡単な説明】
【0020】
【図1】本発明の一実施形態の構成を示す図である。
【図2】像の固まり毎の地理的な大きさの推定を説明する図である。
【発明を実施するための形態】
【0021】
以下、図面に基づいて本発明の実施形態について詳細に説明する。
図1は、本発明の一実施形態の構成を示す図である。
以下、図面に基づいて本発明の実施形態について詳細に説明する。
【0022】
図において、GPSコンパス11の出力は観測値抽出部12の第一の入力に接続され、レーダセンサ13の出力は信号処理部14の入力に接続される。信号処理部14の第一の出力は観測値抽出部12の第二の入力に接続され、その観測値抽出部12の出力は、フィルタ20-1〜20-Nの入力と、重み計算部30の第一の入力とに接続される。フィルタ20-1〜20-Nの第一の出力は重み計算部30の第二ないし第(N+1)の入力に接続され、その重み計算部30の出力は統合推定部15の第一の入力に接続される。フィルタ20-1〜20-Nの第二の出力は統合推定部15の第二ないし第(N+1)の入力に接続され、その統合推定部15の出力は観測値抽出部12の第三の入力およびベクトル映像生成部16の入力に接続される。ベクトル映像生成部16の出力と信号処理部14の出力とは画像重畳部17の第一および第二の入力にそれぞれ接続され、その画像重畳部17の出力はモニタ18の入力に接続される。
【0023】
フィルタ20-1は、以下の要素から構成される。
(1) 観測値抽出部12の出力に接続された第一の入力を有し、かつ出力が既述の重み計算部30の対応する入力に接続された残差算出部21-1
【0024】
(2) 入力が上記重み計算部30の対応する入力および残差算出部21-1の出力に接続され、かつ出力が既述の統合推定部15の対応する入力に接続された第一の出力を有する位置速度推定部22-1
(3) その位置速度推定部22-1の第二の出力に縦続接続され、かつ出力が残差算出部21-1の第二の入力に接続された位置速度予測部23-1
【0025】
なお、フィルタ20-2〜20-Nの構成については、フィルタ20-1の構成と同じであるので、以下では、機能および構成が同じ構成要素に、添え番号「1」に代わる添え番号「2」〜「N」が付加された同じ符号を付与し、ここでは、説明および図示を省略する。
【0026】
重み計算部30は、以下の要素から構成される。
(1) 観測値抽出部12の出力に縦続接続された係数メモリ31
(2) 係数メモリ31の出力に縦続接続され、かつ出力が統合推定部15の対応する入力に接続された重み修正部32
【0027】
(3) フィルタ15-1〜15-Nの第二の出力に個別に接続されたN個の入力を有する修正前重み算出部33
(4) 上記重み修正部33の出力と、重み修正部32の対応する入力との間に配置された重み保存メモリ34
【0028】
以下、図1を参照して本実施形態の動作を説明する。
信号処理部14は、レーダセンサ13から得られた相対距離と相対方位とで表される位置毎の電磁波の強度に対して距離補正、干渉除去処理などを行い、2次元のレーダ映像を生成する。
【0029】
観測値抽出部12は、最新のスキャン(以下、「今回のスキャン」という。)で得られたレーダ映像を像の固まりごとに分類して番号付けし、像の固まり毎に、その観測位置および、像の地理的な大きさの推定値を観測値として求める。
【0030】
ここに、像の固まり毎の観測位置は、像の重心位置までの相対距離、相対方位と、GPSコンパス11から得られた自船緯度経度と、自船船首方向とに基づいて求められた対地位置として与えられる。
【0031】
また、像の固まり毎の地理的な大きさの推定値は、像を構成する強度データの数だけではなく、例えば、図2に2つの矢印で示すように、像の重心位置における1つの強度データが示す距離(レンジ)方向の長さと、方位(スキャン)方向の長さとの積として与えられる。
【0032】
さらに、観測値抽出部12は、追尾中の目標毎に、今回スキャンの目標の予測位置と今回得られた観測位置との相関をとることにより、最も相関の高い像の観測値を今回の当該目標の観測値とする。
【0033】
フィルタ20-1〜20-Nの各部は、後述するように連係することにより、追尾の対象である目標毎に下記の処理を行う。
【0034】
なお、以下では、フィルタ20-1〜-20-Nに共通の事項については、添え番号「1」〜「N」に代えて、これらの添え番号「1」〜「N」の何れにも該当し得ることを示す添え文字「C」を用いて記載する。
【0035】
位置速度予測部23-Cは、前回のスキャン時に位置速度推定部22-Cによって計算された目標の位置、速度から今回のスキャンにおける目標の予測位置、速度を、指定運動モデルに基づいて予測する。
【0036】
残差算出部21-Cは、このようにして予測された今回のスキャンにおける目標の予測位置と、観測値抽出部12によって(像の固まり毎に)求められた目標の観測位置とを比較し、これらの予測位置と観測位置との差を位置残差として求める。さらに、残差算出部21-Cは、このようにして求められた位置残差の移動平均(以下、「残差平均」という。)を求めて保存する。
【0037】
位置速度推定部22-Cは、位置速度予測部23-Cによって予測された今回スキャンの目標の予測位置および速度に、それぞれ残差算出部21-Cによって求められた位置残差と所定のゲインとの積を加えることにより、目標の推定位置および速度の推定値を更新する。
【0038】
重み計算部30の各部は、以下の通りに連係することにより、目標毎に下記の処理を行う。
係数メモリ31には、フィルタ20-1〜20-Nの構成や特性にそれぞれに適し、かつ目標の地理的な大きさ(の推定値)に適した値として設定された重み修正係数の系列が予め格納される。
【0039】
修正前重み算出部33は、フィルタ20-1〜20-N(残差算出部21-1〜21-N)によって並行して求められたN個の残差平均を個別に参照し、該当する残差平均が小さいほど大きな値として対応するフィルタに適用されるべき「修正前重み」を算出し、重み保存メモリ34に保存する。
【0040】
重み修正部32は、以下の処理を行う。
(1) 観測値抽出部12によって求められた目標の地理的な大きさの推定値に応じて係数メモリ31を参照することにより重み補正係数を求める。なお、このような重み補正係数は、フィルタ20-1〜20-Nにそれぞれ対応した重み修正係数の系列の総和が「1」となる値に正規化されてもよい。
【0041】
(2) このような重み修正係数と、フィルタ20-1〜20-Nに個別に対応して重み保存メモリ34に保存されている「修正前重み」との積をとり、かつ総和を「1」とする正規化の処理を施すことにより、これらのフィルタ20-1〜20-Nに対応した重みW1〜WNを求める。
【0042】
統合推定部15は、フィルタ20-1〜20-N(位置速度推定部22-1〜22-N)によって推定されたN個の目標の位置と速度とのそれぞれについて、上記重みW1〜WNとの積和をとることにより、今回スキャンに基づく推定値として目標の位置および速度を求める。
【0043】
ベクトル映像生成部16は、今回スキャンに基づく推定値として求められた個々の目標の位置および速度から、対応する目標を示す画像(以下、「目標画像」という。)を生成する。画像重畳部17は、既述の通りに信号処理部14によって生成されたレーダ映像に、上記目標画像を重畳してモニタ18に引き渡す。
【0044】
このように本実施形態によれば、個々の目標の位置や速度は、複数の異なるフィルタ20-1〜20-N毎に、個別に行われた予測の誤差が小さく、かつ該当する目標の地理的なサイズが大きいほど安定性を重視したフィルタの重みが大きくなるような値に設定された重みW1〜WNと、これらのフィルタ20-1〜20-Nによって行われた推定の結果との積和として求められる。
【0045】
したがって、フィルタ20-1〜20-Nの構成や特性が目標の特徴に応じて有効に活用されることにより、追尾の対象となる目標の振る舞い、移動の形態その他の特徴の違いに起因する大きな誤差が生じることなく、しかも、従来例に比べて構成が大幅に複雑化することなく、所望の目標の追尾が安定に精度よく実現される。
【0046】
なお、本実施形態では、目標の位置および速度のみの精度の向上が本発明によって図られている。
しかし、本発明は、フィルタ20-1〜20-Nによって行われる予測および推定の対象が目標の位置、速度(移動の方向を含む。)、距離および方位の全てまたは一部であるならば、これらの位置、速度、距離および方位を精度よく得るためにも、同様に適用可能である。
【0047】
また、本実施形態では、上記目標の特徴として、目標の地理的なサイズのみが参照されている。
しかし、このような目標の特徴は、例えば、以下に列記する項目の何れか1つと、任意の組み合わせとの何れであってもよい。
【0048】
(1) 目標の距離
目標の距離は、遠いほど自船の動揺等に起因して目標の位置に大きく生じる可能性がある誤差の緩和を図る必要があるため、フィルタ20-1〜20-Nによって個別に得られた推定の結果に対する重み付けの基準として用いることができる。
【0049】
(2) 目標から到来した受信波のドップラ周波数、またはそのドップラ周波数の分布(変動幅)
上記ドップラ周波数およびその分布(変動幅)は、小さいほどその目標の相対的な位置、速度、距離および方位が頻繁には変化していないことを意味するため、フィルタ20-1〜20-Nによって個別に得られた推定の結果に対する重み付けの基準として用いることができる。
【0050】
また、フィルタ20-1〜20-Nによって個別に得られた推定の結果に対する重み付けの基準は、これらのフィルタ20-1〜20-Nの特性だけではなく、例えば、位置や速度の予測および推定を実現する処理のアルゴリズム、その処理の過程で用いられるパラメータの内容、形式その他の如何なるものであってもよい。
【0051】
さらに、本発明に係る航法支援装置は、位置、速度、距離、方位の何れかが求められた目標の追尾や自動操舵(操縦)を実現する多様な航法応用系に適用可能である。
【0052】
また、これらの位置、速度、距離、方向が求められるべき目標については、数は「1」であってもよく、かつ位置するレンジは如何なるものであってもよい。
【0053】
さらに、本実施形態では、像の固まり毎の観測位置を絶対的な対地位置として得るための基準となる自船緯度経度がGPSコンパス11によって得られている。
しかし、このような自船緯度経度は、自立航法や多様な無線航法に基づいてが備えられてもよく、あるいは図示されない操作部を介してユーザによって手動で設定されてもよい。
【0054】
また、本実施形態では、目標の相対距離や相対方向がレーダセンサ13によって直接与えられている。
しかし、このような目標の相対距離や相対方向は、例えば、目標から到来した受信波に施された所定の信号処理の下で与えられ、あるいはこのような目標の移動を模擬するシミュレータによって与えられてもよく、さらに、これらの信号処理や模擬の結果が蓄積された記憶装置によって与えられてもよい。
【0055】
さらに、本実施形態に係る航法支援装置は、船舶に搭載され、かつ他船の追尾を行う航法系や自動操舵系と連係しているが、例えば、航空機その他の多様な移動体に搭載されることによって、所望の目標の位置、速度、距離、方位を求めるためにも、同様に適用可能である。
【0056】
また、本実施形態の構成は、図1に示す構成に限定されず、所望の応答性や実時間性が損なわれることなく、既述の処理と同等または等価な処理が実現されるならば、これらの処理の全てまたは一部は、多様な情報処理装置やDSPが実行するソフトウェアによって如何なる機能分散あるいは負荷分散の下で実現されてもよい。
さらに、本発明は、上述した実施形態に限定されず、本発明の範囲において多様な実施形態の構成が可能であり、構成要素の全てまたは一部に如何なる改良が施されてもよい。
【符号の説明】
【0057】
11 GPSコンパス
12 測定値抽出部
13 レーダセンサ
14 信号処理部
15 統合推定部
16 ベクトル映像生成部
17 画像重畳部
18 モニタ
20 フィルタ
21 残差算出部
22 位置速度推定部
23 位置速度予測部
30 重み計算部
31 係数メモリ
32 重み修正部32
33 修正前重み算出部
34 重み保存メモリ
【特許請求の範囲】
【請求項1】
目標から到来した受信波に基づいて前記目標の位置、距離、速度、方位の全てまたは一部の予測および推定を個別に行う複数N個のフィルタと、
前記目標の特徴を得る特徴識別手段と、
前記複数N個のフィルタ毎に特性が前記特徴に整合するほど値が大きく、かつ前記複数Nのフィルタに個別に対応する重みW1〜WNを設定する重み設定手段と、
前記複数のフィルタによって行われた推定の結果と前記重みW1〜WNとの積和として前記目標の位置、距離、速度、方位の全てまたは一部を得る重み付け手段と
を備えたことを特徴とする航法支援装置。
【請求項2】
請求項1に記載の航法支援装置において、
前記目標の特徴は、
前記目標の地理的なサイズである
ことを特徴とする航法支援装置。
【請求項3】
請求項1に記載の航法支援装置において、
前記目標の特徴は、
前記目標の距離である
ことを特徴とする航法支援装置。
【請求項4】
請求項1に記載の航法支援装置において、
前記目標の特徴は、
前記受信波に含まれるドップラ周波数、または前記ドップラ周波数の分布である
ことを特徴とする航法支援装置。
【請求項1】
目標から到来した受信波に基づいて前記目標の位置、距離、速度、方位の全てまたは一部の予測および推定を個別に行う複数N個のフィルタと、
前記目標の特徴を得る特徴識別手段と、
前記複数N個のフィルタ毎に特性が前記特徴に整合するほど値が大きく、かつ前記複数Nのフィルタに個別に対応する重みW1〜WNを設定する重み設定手段と、
前記複数のフィルタによって行われた推定の結果と前記重みW1〜WNとの積和として前記目標の位置、距離、速度、方位の全てまたは一部を得る重み付け手段と
を備えたことを特徴とする航法支援装置。
【請求項2】
請求項1に記載の航法支援装置において、
前記目標の特徴は、
前記目標の地理的なサイズである
ことを特徴とする航法支援装置。
【請求項3】
請求項1に記載の航法支援装置において、
前記目標の特徴は、
前記目標の距離である
ことを特徴とする航法支援装置。
【請求項4】
請求項1に記載の航法支援装置において、
前記目標の特徴は、
前記受信波に含まれるドップラ周波数、または前記ドップラ周波数の分布である
ことを特徴とする航法支援装置。
【図1】


【図2】
【図2】
【公開番号】特開2011−247731(P2011−247731A)
【公開日】平成23年12月8日(2011.12.8)
【国際特許分類】
【出願番号】特願2010−120826(P2010−120826)
【出願日】平成22年5月26日(2010.5.26)
【出願人】(000004330)日本無線株式会社 (1,186)
【Fターム(参考)】
【公開日】平成23年12月8日(2011.12.8)
【国際特許分類】
【出願日】平成22年5月26日(2010.5.26)
【出願人】(000004330)日本無線株式会社 (1,186)
【Fターム(参考)】
[ Back to top ]