
航法衛星受信機システムおよび信号の弱い環境で高感度航法衛星受信機のウォームスタートを速めるための方法

【課題】ZカウントのスキップおよびGPS受信機の正確な時刻。
【解決手段】航法衛星受信機は高感度の電波周波数フロントエンドおよびクライアントCPUと関連付けられた航法プロセッサを含んで構成される。クライアントCPUは、航法プロセッサとシリアル通信するオペレーティングシステムを走行させる。クライアントCPUはネットワークサーバから航法データシステム送信を取得して、高感度環境で直接衛星信号が弱すぎて直接に復調できないときそれを供給することができる。ウォッチタイプの水晶を有する低電力低周波数の発振器およびカウンタをリアルタイムクロックとして使用して、受信機が休眠状態にあるときには時間の不確定性を50ミリ秒未満に抑える。受信機が再び目覚めたときに時間の不確定性および位置の不確定性が一定の最大値に満たなければ、必要なのは最低数の衛星だけで、各衛星ごとの仮のzカウントを計算しなくていい。
【解決手段】航法衛星受信機は高感度の電波周波数フロントエンドおよびクライアントCPUと関連付けられた航法プロセッサを含んで構成される。クライアントCPUは、航法プロセッサとシリアル通信するオペレーティングシステムを走行させる。クライアントCPUはネットワークサーバから航法データシステム送信を取得して、高感度環境で直接衛星信号が弱すぎて直接に復調できないときそれを供給することができる。ウォッチタイプの水晶を有する低電力低周波数の発振器およびカウンタをリアルタイムクロックとして使用して、受信機が休眠状態にあるときには時間の不確定性を50ミリ秒未満に抑える。受信機が再び目覚めたときに時間の不確定性および位置の不確定性が一定の最大値に満たなければ、必要なのは最低数の衛星だけで、各衛星ごとの仮のzカウントを計算しなくていい。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、信号の弱い環境で、電源をオフにしてから、また電源投入された高感度航法衛星受信機に関し、より具体的には、受信した信号が弱すぎてGPSキャリアからの航法データを復調できないときにzカウントおよびシステム時刻を判定しなくてもすむようにするための方法および回路に関する発明である。
【背景技術】
【0002】
全地球測位システム(GPS)の受信機は、衛星群の中のいくつかの地球の軌道を回る衛星から受信する信号を用いてユーザの位置や速度およびその他の航法データを判定する。電源投入されたばかりの先行技術の航法受信機は、その所在位置も、その水晶発振器の誤差の大きさも、また現在時刻もわからない。これらはすべて衛星の送信を見出して捕捉するのに必要だから、可能性を探らなければならない。時間を節約するために、最も有望な候補を先ず最初に探索する。
【0003】
高感度GPS受信機は、初期の時刻または周波数の不確定性が大きいと問題がある。信号のエネルギーが非常に弱いと、受信機は互いに近接しているより多くの個々の周波数を聴き、各ステップに長く滞在しなければならない。飛行中の衛星の相対速度によって起きるドップラーシフトはこの周波数不確定性の一因だけれども、ローカルクロック誤差もそうである。ローカルクロックが精度の高い時刻基準と同期をとっていない場合には、クロック誤差が非常に大きい可能性がある。従来のGPS受信機は電源をオフにすると、精度の高い時間基準を提供していたGPS衛星の追尾を止める。ユーザがGPS受信機の電源をオフにすると、一般にGPS受信機の基準発振器も電力供給が断たれる。したがって、ローカル基準発振器の初期推定値がより優れていると、初期測位時間(time-to-first-fix)を向上させることができる。
【0004】
「zカウント」は、6秒毎にGPS航法メッセージの中に送られてくるタイムスタンプである。地球の表面上の軌道を回る衛星までの距離はどれでも60〜85ミリ秒だから、位置を知らなくても、最初のzカウントを用いて受信機の時刻を±13ミリ秒で初期設定できる。
【0005】
信号レベルが−145dbmよりも優れたGPS受信機は、強力なGPS衛星(SV)を容易に捕捉してNAVデータを復号化することができる。そうすることによりGPS衛星のエフェメリスおよび位置を得られる。その後、ハードウェアのコード位相から擬似距離の合計を形成しなければならない。従来のGPS受信機はいわゆるzカウントから整数ミリ秒距離(integer millisecond range)を判定する。
【0006】
信号レベルが大まかに言って−145dbm〜−150dbmよりも劣っている場合には、実用的な高感度GPS受信機はパターンマッチングの技を使ってzカウントを得ることができる。
【0007】
一つ以上のGPS衛星(SV)を捕捉して追尾しているGPS受信機は非常に高い精度で時刻がわかっている。これは、GPSシステムは、使用する時刻および周波数の基準を設定する原子時計に基づいているためである。GPS衛星から送信されてくる粗い捕捉(C/A)コードは伝播波長の1ミリ秒ごとの繰り返しだから、GPS衛星がどのミリ秒を観測しているかについては基本的なアンビギュイティがある。整数ミリ秒がわかれば(例えば、擬似距離は1ミリ秒よりも優れていることがわかれば)、整数アンビギュイティが解明される。そうすると、その測位(fix)から正確な時刻を得ることができる。初期捕捉時に、最低で4つではなく3つの衛星を捕捉すればいい。見出す衛星が一つ減ると、初期測位までの時間を短縮できる。
【0008】
本願の発明者Paul McBurneyは、リアルタイムクロックの走行を保持するソリューションを説明している。2004年3月30日発行の米国特許6714160を参照。この米国特許は参照することにより本明細書に組み込まれているものとする。しかし、そうしたソリューションを用いても、リアルタイムクロックをオン状態に保持しておくだけでもアイドル電流は3ボルトで3ミリアンプ、つまり9〜10ミリワットにもなる。必要なのは、10マイクロワット以下で優れた結果を提供できるリアルタイムクロックである。Paul McBurneyはさらに、2003年12月30日発行の米国特許6670916にグリッド探索法を説明している。航法衛星受信機は、時刻が数秒以内で、位置が150キロメートル以内でわかっていると、その初期化を速めることが可能になる。150キロメートル領域の範囲内で解の始点を表わす定高度(constant altitude)を用いて2次元の点グリッドをセットアップする。グリッドの中の点との最良の初期フィットを得るために衛星群の中の各衛星からの擬似距離の端数(fractional pseudoranges)を調べる。最良の一致点を見出すために点に対して時間の限度内で様々な時間偏差(time bias)の調整も試みる。そうして、最終の解を見出して初期測位を生成する際にその点を用いる。
【0009】
位置の不確定性がコード位相アンビギュイティ距離の半分を超えると、衛星から受信機までの整数ミリ秒を判定するのにzカウントが必要になる。ユーザ位置の測位を計算するために、擬似距離の合計(例えば、整数ミリ秒およびzカウント)を形成しなければならない。
【0010】
【特許文献1】米国特許出願公開第2003/0139879号明細書
【発明の開示】
【発明が解決しようとする課題】
【0011】
必要なのは、低エネルギーで高感度GPS受信機のウォームスタートをスピードアップできる程度に正確な時刻を保持できる方法である。
【課題を解決するための手段】
【0012】
大まかに言えば、本発明の航法衛星受信機の実施例は、クライアントCPUと関連付けられた高感度の電波周波数フロントエンドおよび航法プロセッサを含む。クライアントCPUは航法プロセッサとシリアル通信するオペレーティングシステムを走行させる。クライアントCPUはネットワークサーバから航法データシステム送信を得ることもできるので、高感度環境で直接の衛星信号が弱すぎて直接に復調できないときにそうした送信を供給する。受信機が休眠状態にあるときに時間の不確定性を50ミリ秒未満に保持するために、ウォッチタイプの水晶を有する低電力低周波数発振器およびカウンタがリアルタイムクロックとして使用される。受信機が再び目覚めたとき時間の不確定性および位置の不確定性が一定の最大値よりも低い場合には、必要になるのは最低数の衛星でしかも各衛星ごとの仮のzカウントを計算しなくていい。
【0013】
本発明の利点は、航法衛星受信機において高感度の測位をより高速に生成する方法および回路を提供していることである。
【0014】
13本発明のもう一つの利点は、信号は非常に弱いけれどもコード位相を得られる程度の強度をもっているときに適した、およびGPS受信機でzカウントおよび整数ミリ秒を見出すためにより難しい手順や計算を使用しなくていいようにするための方法およびシステムを提供していることである。
【0015】
本発明の更なる利点は、GPS受信機でリアルタイムクロックに必要な休眠電流(hibernation current)を減らすための方法およびシステムを提供していることである。
【0016】
図面に図示されている好適な実施例について以下に述べる詳細な説明を読むと、当業者ならば本発明のこれらのそしてその他の効果が自明になることは疑いの余地がない。
【発明を実施するための最良の形態】
【0017】
以下、本発明の実施形態を図面に基づいて説明する。
【実施例1】
【0018】
図1は、本発明の高感度航法衛星受信機システムの実施例を表わしており、ここでは大まかな参照番号100で示している。システム100は、ネットワークサーバ104がサポートしている少なくとも一つの航法プラットフォーム102を含む。軌道を回る航法衛星から受け取る送信は信号105で表わされている。信号105が弱すぎて航法データを復調できないけれどもコード位相を得られる程度の強さをもっているときに、本発明の主要なメリットが生かされる。航法プラットフォーム102は、測位を生成するのにそうした航法データを必要とするから、そうした情報を提供するようネットワークサーバ104が呼び出される。
【0019】
本発明の実施例は、したがって、信号の強度が非常に低く、コード位相アンビギュイティ距離の半分以内の前の位置を使用可能な状況で動作する高感度GPS受信機と関連している。(コード位相アンビギュイティ距離は、通常はおよそ75kmだけれども、位置の不確定性が軽減されるとクロックの不確定性を正しく解明できるので、グリッド探索を用いるとおよそ150kmまで拡大する。)例えば、屋内や樹木の群葉など自然の覆いのあるところ。そうした状況では、使用可能な衛星の数がぎりぎりかもしれないので、ウォームスタートからの高感度測位に必要な衛星の最低数が4つではなく3つでよければ有利な効果がある。
【0020】
各GPS測定プラットフォーム102は一般的に、GPSアンテナ106、低雑音アンプ(LNA)108、GPS表面弾性波(SAW)フィルタ110、中間周波数(IF)SAWフィルタ113を有する電波周波数(RF)用途特定集積回路(ASIC)112、専用化されたGPS航法デジタル信号プロセッサ(DSP)114、高周波数のCPU水晶発振器115、クライアント通信チャネル116、リアルタイムクロック(RTC)カウンタ117、低周波数のウォッチタイプの水晶発振器118、および電池120を含んで構成される。
【0021】
水晶発振器118をウォッチタイプの水晶で動作させると実質的な量の電力を節約できる。そうした水晶はおよそ32−KHzで共振し、この低周波数が直面するAC負荷の影響がはるかに少ない。先行技術のRTCははるかに高い周波数およびアイドル電流を有する発振器を使用している。
【0022】
DSP114は位置および時間の不確定性計算機を含んでいる。そうした計算機はリスタート時に、ユーザの移動により位置の不確定性がコード位相アンビギュイティ距離のほぼ半分よりも大きくなったか、および/または時間の不確定性がおよそ50msより大きくなったか、つまり10秒を超えたか判定することができる。受信した信号が弱すぎてzカウントを判定できない場合には、コード位相雑音がより高い。50ms未満の時間誤差に起因する衛星位置の算定誤差による位置の不確定性の劣化は、位置の不確定性がコード位相雑音を越えるところまではいかない。zカウントを使わない測位におけるモデル作成は10秒を超えると不確定になる。真の時間誤差は電源オフ期間の周波数誤差の積分である。最悪の場合の周波数誤差に受信機が電源オフになっている期間を乗算することによって真の時間誤差を近似することができる。温度補正法を用いて許容可能な電源オフ時間を延長することができる。
【0023】
DSP114はさらに、位置および時間の不確定性計算機が不確定性が小さくて測位に直接進めることを示している場合には、仮のzカウント判定をスキップするロジックを含んでいる。そうしたロジックは、zカウントを使わずにわずか3つの衛星を用いてウォームスタートから初期測位を得ることができる。それについては図2にさらに詳細に述べている。
【0024】
「クライアント側」は、27.456MHzのマスタクロック(MCLK)水晶発振器112、ホストプロセッサ(CPU)124、基準水晶温度センサ(T)126、水晶温度周波数モデル128、およびMCLKのミリ秒をモニタするミリ秒エポックモニタ130を含んでいる。クライアントCPU124とDSP114との通信はシリアルチャネル116で行なわれる。クライアントCPU124上で走行しているオペレーティングシステムは、そうした通信を制御するので、航法以外の作業を行なっていることがある。したがって、クライアント側で維持されている時刻を初期化に役立つほどうまくDSP114に通信することはできない。DSP114が役に立つほど正確な時刻をパワーダウン時にも維持させようとする場合、RTC117のようなローカルタイマーを有していなければならない。DSP114はGPSシステム時刻に対してRTC117のカウントオフセットをキャリブレートし、この偏差(bias)を後にRTC117のカウントを評価するときに差し引くことができる。
【0025】
RTC117のカウントは、GPSシステム時刻のミリ秒(msec)間隔でのみ読み取るように同期化されている。これによって、必要な50ミリ秒よりも優れた精度を提供する一定読み出しが保証される。カウンタがアドホックでしか読み出さないとしたら、50ミリ秒の精度は不可能である。受信機は測位ができたら、はっきりしたミリ秒でGPS時刻がわかるので、ほとんど誤差なしに時刻をミリ秒まで伝播可能である。受信機を再スタートさせると、別のGPSミリ秒が読み出される。最後の測位でのカウンタと現時点のミリ秒で読み出された現在値との差を加算することによって、どの時刻がその新たなミリ秒と関連付けるか知ることができる。
【0026】
一つの実施例において、低周波数ウォッチタイプの水晶発振器118はおよそ32.768KHzで動作し、基本的な水晶の周波数の許容差±20ppmを有する。例えば、従来のクォーツウォッチの発振器の水晶。
【0027】
32.768KHzの範囲で動作する水晶発振器は、もっと高い周波数で走行する発振器よりも動作するのに要するパワーがはるかに少ない。これは主として、より高い周波数で発生するAC信号の容量性負荷の増大に起因している。
【0028】
電池120は携帯操作(portable operation)を提供し、ユーザが遮断できる動作電力を供給する。ユーザは休眠電力をオフにすることはできないので、そうした休眠電力によって低周波数発振器118およびRTCカウンタ117はオン状態に保持される。
【0029】
高感度の航法受信機が再び目覚めたとき、2つの基本的な不確定性、例えば、位置および時間の不確定性がある。位置の不確定性がコード位相アンビギュイティ距離の半分未満で、時間の不確定性が50ミリ秒未満の場合には、入手し難い情報を使用しなくていいから、ショートカットを用いて高速なウォームスタート測位を提供できる。これには最低で3つの衛星が必要である。時間の不確定性が10秒未満の場合には、各衛星に対するzカウントは回避できるけれども、最低で4つの衛星が必要になる。
【0030】
本発明の実施例は、低周波数発振器118およびRTCカウンタ117をGPSシステム時刻に対してキャリブレートし、その得たカウントを用いてその後ウォームスタート時に受信機のクロックをリセットすることによって、再びパワーアップした後の時間の不確定性を減少させる。具体的に言えば、信号の非常に弱い環境では、航法データを衛星の送信から直接に復調することはできない。
【0031】
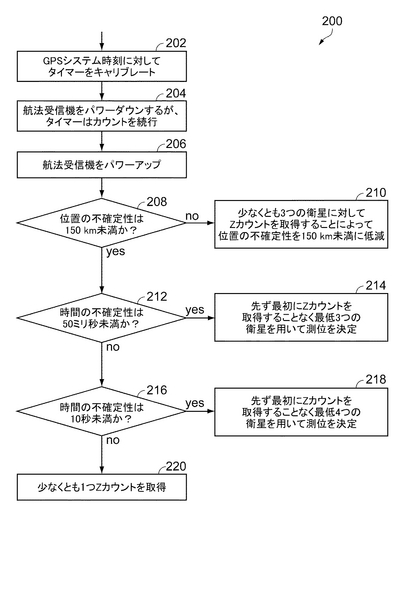
図2に、本発明の方法の実施例を図示し、大まかな参照番号200で示している。正確なGPSシステム時刻が使用可能であったコールドスタートおよび初期化後に、ステップ202で、GPS測位からGPS時刻を計算できるときにミリ秒の割り込みでカウンタを読み取ることによってタイマーをキャリブレートする。例えば、図1のRTCカウンタ117を使用できる。ステップ204で、航法受信機はパワーダウンされるが、タイマーは、例えば、図1に表示したように電池で走行し続ける。ステップ206のように、GPS航法受信機を再びスタートさせたとき、位置の不確定性および時間の不確定性がある。受信機がどれだけの間パワーダウンしていたか、したがって位置および時間の不確定性がどれだけあるか計算するために、例えば、DSP114におけるプロセスによって、タイマーから情報を得る。例えば、位置の不確定性は、可能な最大ユーザ速度にデルタ時間(ΔT)を掛けたものである。時間の不確定性は、水晶の周波数ドリフトにデルタ時間(ΔT)を掛けたものである。
【0032】
ステップ208で、位置不確定性のテストを行なう。位置の不確定性がコード位相アンビギュイティ距離のほぼ半分、つまり1ミリ秒のコード位相の半分の伝播距離を越えていれば、ステップ210を用いて3つの衛星に対するzカウントを得る。これにより不確定性がコード位相アンビギュイティ距離の半分未満に減り、4つ目の衛星がなくてもグリッド探索法を用いて作業を進めることができる。
【0033】
位置の不確定性がコード位相アンビギュイティ距離の半分未満まで減ったら、或いは半分未満であると判定されたら、ステップ212を用いて時間の不確定性が50ms未満かどうか調べることができる。そうならば、ステップ214で、zカウントを用いずに衛星3つだけで、測位を決めることができる。ステップ216を用いて時間の不確定性が10秒未満であるかどうか調べる。そうならば、ステップ218で、zカウントを使わずに測位を判定するけれども、その場合には4つの衛星が必要である。そうでなければ、ステップ210でzカウントを少なくとも一つ得る。
【0034】
信号の弱い環境で高感度航法衛星受信機のウォームスタートを速める本発明の方法の実施例は、2つの異なったセッションを有する。GPS受信機を用いた第1セッション時には、GPS衛星が捕捉され、ユーザ位置の測位が生成される。次に、受信機のミリ秒でGPSシステム時刻が解明される。GPS受信機内に装備された水晶発振器駆動のタイマーからカウントが読み取られ、受信機のミリ秒に対してキャリブレートされる。タイマーから得たカウントと取得したGPSシステム時刻とがメモリにログとして記録される。その後、パワーダウンして第1セッションが終わる。
【0035】
再びパワーアップして第2セッションが始まるが、その間ずっとタイマーはオン状態に保持され、カウントを続行している。タイマーのカウントが受信機のミリ秒で読み出され、第1セッションでメモリに記憶された最後のカウントを減算して、GPS受信機が電源オフになっていたクロック数が決められる。最後のわかっているGPSシステム時刻までのクロック数を用いて受信機の時刻が設定される。そのために、位置の不確定性がある特定のしきい値を超えていないときには、サーバに時間のかかる或いは入手可能でないNAVデータを求める要求を回避することができる。
【0036】
ここで説明したようなおよそ32KHzでクロックされるタイマーは10マイクロワット未満で動作可能である。温度測定を周期的に行なって、計算している受信機が電源オフになっていた期間をさらに微調整することもできる。例えば、オフ時間全体を構成期間(constituent periods)に構文解析する。
【0037】
現時点で好適な実施例によって本願を説明してきたが、開示を限定として解釈するべきでないと理解するべきである。上記の開示を読めば、当業者ならば多種多様な変形例および修正例が明白になることは疑いの余地がない。したがって、発明の「真の」精神および範囲から逸脱しない限りにおいて、あらゆる変形例および修正例も特許請求の範囲に含まれるものと解釈されるはずであると考える。
【図面の簡単な説明】
【0038】
【図1】サーバがクライアントをサポートし、情報がインターネットで通信される、本発明のネットワークシステムの実施例の機能ブロック図。
【図2】本発明の方法の実施例のフローチャート図。
【符号の説明】
【0039】
108 低雑音アンテナ
110 GPS SAWフィルタ
112 RF ASIC
113 IF SAWフィルタ
114 DSP ASIC
117 RTCカウンタ
120 電池
124 CPU
128 水晶モデル
130 ミリ秒エポック
134 ネットワーク
140 基準局マネージャ
142 ロケーションサーバ
202 GPSシステム時刻に対してタイマーをキャリブレート
204 航法受信機をパワーダウンするが、タイマーはカウントを続行
206 航法受信機をパワーアップ
208 位置の不確定性は150 km未満か?
210 少なくとも3つの衛星に対してzカウントを取得することによって位置の不確定性を150 km未満に低減
212 時間の不確定性は50ミリ秒未満か?
214 先ず最初にzカウントを取得することなく最低3つの衛星を用いて測位を決定
216 時間の不確定性は10秒未満か?
218 先ず最初にzカウントを取得することなく最低4つの衛星を用いて測位を決定
220 少なくとも一つzカウントを取得
【技術分野】
【0001】
本発明は、信号の弱い環境で、電源をオフにしてから、また電源投入された高感度航法衛星受信機に関し、より具体的には、受信した信号が弱すぎてGPSキャリアからの航法データを復調できないときにzカウントおよびシステム時刻を判定しなくてもすむようにするための方法および回路に関する発明である。
【背景技術】
【0002】
全地球測位システム(GPS)の受信機は、衛星群の中のいくつかの地球の軌道を回る衛星から受信する信号を用いてユーザの位置や速度およびその他の航法データを判定する。電源投入されたばかりの先行技術の航法受信機は、その所在位置も、その水晶発振器の誤差の大きさも、また現在時刻もわからない。これらはすべて衛星の送信を見出して捕捉するのに必要だから、可能性を探らなければならない。時間を節約するために、最も有望な候補を先ず最初に探索する。
【0003】
高感度GPS受信機は、初期の時刻または周波数の不確定性が大きいと問題がある。信号のエネルギーが非常に弱いと、受信機は互いに近接しているより多くの個々の周波数を聴き、各ステップに長く滞在しなければならない。飛行中の衛星の相対速度によって起きるドップラーシフトはこの周波数不確定性の一因だけれども、ローカルクロック誤差もそうである。ローカルクロックが精度の高い時刻基準と同期をとっていない場合には、クロック誤差が非常に大きい可能性がある。従来のGPS受信機は電源をオフにすると、精度の高い時間基準を提供していたGPS衛星の追尾を止める。ユーザがGPS受信機の電源をオフにすると、一般にGPS受信機の基準発振器も電力供給が断たれる。したがって、ローカル基準発振器の初期推定値がより優れていると、初期測位時間(time-to-first-fix)を向上させることができる。
【0004】
「zカウント」は、6秒毎にGPS航法メッセージの中に送られてくるタイムスタンプである。地球の表面上の軌道を回る衛星までの距離はどれでも60〜85ミリ秒だから、位置を知らなくても、最初のzカウントを用いて受信機の時刻を±13ミリ秒で初期設定できる。
【0005】
信号レベルが−145dbmよりも優れたGPS受信機は、強力なGPS衛星(SV)を容易に捕捉してNAVデータを復号化することができる。そうすることによりGPS衛星のエフェメリスおよび位置を得られる。その後、ハードウェアのコード位相から擬似距離の合計を形成しなければならない。従来のGPS受信機はいわゆるzカウントから整数ミリ秒距離(integer millisecond range)を判定する。
【0006】
信号レベルが大まかに言って−145dbm〜−150dbmよりも劣っている場合には、実用的な高感度GPS受信機はパターンマッチングの技を使ってzカウントを得ることができる。
【0007】
一つ以上のGPS衛星(SV)を捕捉して追尾しているGPS受信機は非常に高い精度で時刻がわかっている。これは、GPSシステムは、使用する時刻および周波数の基準を設定する原子時計に基づいているためである。GPS衛星から送信されてくる粗い捕捉(C/A)コードは伝播波長の1ミリ秒ごとの繰り返しだから、GPS衛星がどのミリ秒を観測しているかについては基本的なアンビギュイティがある。整数ミリ秒がわかれば(例えば、擬似距離は1ミリ秒よりも優れていることがわかれば)、整数アンビギュイティが解明される。そうすると、その測位(fix)から正確な時刻を得ることができる。初期捕捉時に、最低で4つではなく3つの衛星を捕捉すればいい。見出す衛星が一つ減ると、初期測位までの時間を短縮できる。
【0008】
本願の発明者Paul McBurneyは、リアルタイムクロックの走行を保持するソリューションを説明している。2004年3月30日発行の米国特許6714160を参照。この米国特許は参照することにより本明細書に組み込まれているものとする。しかし、そうしたソリューションを用いても、リアルタイムクロックをオン状態に保持しておくだけでもアイドル電流は3ボルトで3ミリアンプ、つまり9〜10ミリワットにもなる。必要なのは、10マイクロワット以下で優れた結果を提供できるリアルタイムクロックである。Paul McBurneyはさらに、2003年12月30日発行の米国特許6670916にグリッド探索法を説明している。航法衛星受信機は、時刻が数秒以内で、位置が150キロメートル以内でわかっていると、その初期化を速めることが可能になる。150キロメートル領域の範囲内で解の始点を表わす定高度(constant altitude)を用いて2次元の点グリッドをセットアップする。グリッドの中の点との最良の初期フィットを得るために衛星群の中の各衛星からの擬似距離の端数(fractional pseudoranges)を調べる。最良の一致点を見出すために点に対して時間の限度内で様々な時間偏差(time bias)の調整も試みる。そうして、最終の解を見出して初期測位を生成する際にその点を用いる。
【0009】
位置の不確定性がコード位相アンビギュイティ距離の半分を超えると、衛星から受信機までの整数ミリ秒を判定するのにzカウントが必要になる。ユーザ位置の測位を計算するために、擬似距離の合計(例えば、整数ミリ秒およびzカウント)を形成しなければならない。
【0010】
【特許文献1】米国特許出願公開第2003/0139879号明細書
【発明の開示】
【発明が解決しようとする課題】
【0011】
必要なのは、低エネルギーで高感度GPS受信機のウォームスタートをスピードアップできる程度に正確な時刻を保持できる方法である。
【課題を解決するための手段】
【0012】
大まかに言えば、本発明の航法衛星受信機の実施例は、クライアントCPUと関連付けられた高感度の電波周波数フロントエンドおよび航法プロセッサを含む。クライアントCPUは航法プロセッサとシリアル通信するオペレーティングシステムを走行させる。クライアントCPUはネットワークサーバから航法データシステム送信を得ることもできるので、高感度環境で直接の衛星信号が弱すぎて直接に復調できないときにそうした送信を供給する。受信機が休眠状態にあるときに時間の不確定性を50ミリ秒未満に保持するために、ウォッチタイプの水晶を有する低電力低周波数発振器およびカウンタがリアルタイムクロックとして使用される。受信機が再び目覚めたとき時間の不確定性および位置の不確定性が一定の最大値よりも低い場合には、必要になるのは最低数の衛星でしかも各衛星ごとの仮のzカウントを計算しなくていい。
【0013】
本発明の利点は、航法衛星受信機において高感度の測位をより高速に生成する方法および回路を提供していることである。
【0014】
13本発明のもう一つの利点は、信号は非常に弱いけれどもコード位相を得られる程度の強度をもっているときに適した、およびGPS受信機でzカウントおよび整数ミリ秒を見出すためにより難しい手順や計算を使用しなくていいようにするための方法およびシステムを提供していることである。
【0015】
本発明の更なる利点は、GPS受信機でリアルタイムクロックに必要な休眠電流(hibernation current)を減らすための方法およびシステムを提供していることである。
【0016】
図面に図示されている好適な実施例について以下に述べる詳細な説明を読むと、当業者ならば本発明のこれらのそしてその他の効果が自明になることは疑いの余地がない。
【発明を実施するための最良の形態】
【0017】
以下、本発明の実施形態を図面に基づいて説明する。
【実施例1】
【0018】
図1は、本発明の高感度航法衛星受信機システムの実施例を表わしており、ここでは大まかな参照番号100で示している。システム100は、ネットワークサーバ104がサポートしている少なくとも一つの航法プラットフォーム102を含む。軌道を回る航法衛星から受け取る送信は信号105で表わされている。信号105が弱すぎて航法データを復調できないけれどもコード位相を得られる程度の強さをもっているときに、本発明の主要なメリットが生かされる。航法プラットフォーム102は、測位を生成するのにそうした航法データを必要とするから、そうした情報を提供するようネットワークサーバ104が呼び出される。
【0019】
本発明の実施例は、したがって、信号の強度が非常に低く、コード位相アンビギュイティ距離の半分以内の前の位置を使用可能な状況で動作する高感度GPS受信機と関連している。(コード位相アンビギュイティ距離は、通常はおよそ75kmだけれども、位置の不確定性が軽減されるとクロックの不確定性を正しく解明できるので、グリッド探索を用いるとおよそ150kmまで拡大する。)例えば、屋内や樹木の群葉など自然の覆いのあるところ。そうした状況では、使用可能な衛星の数がぎりぎりかもしれないので、ウォームスタートからの高感度測位に必要な衛星の最低数が4つではなく3つでよければ有利な効果がある。
【0020】
各GPS測定プラットフォーム102は一般的に、GPSアンテナ106、低雑音アンプ(LNA)108、GPS表面弾性波(SAW)フィルタ110、中間周波数(IF)SAWフィルタ113を有する電波周波数(RF)用途特定集積回路(ASIC)112、専用化されたGPS航法デジタル信号プロセッサ(DSP)114、高周波数のCPU水晶発振器115、クライアント通信チャネル116、リアルタイムクロック(RTC)カウンタ117、低周波数のウォッチタイプの水晶発振器118、および電池120を含んで構成される。
【0021】
水晶発振器118をウォッチタイプの水晶で動作させると実質的な量の電力を節約できる。そうした水晶はおよそ32−KHzで共振し、この低周波数が直面するAC負荷の影響がはるかに少ない。先行技術のRTCははるかに高い周波数およびアイドル電流を有する発振器を使用している。
【0022】
DSP114は位置および時間の不確定性計算機を含んでいる。そうした計算機はリスタート時に、ユーザの移動により位置の不確定性がコード位相アンビギュイティ距離のほぼ半分よりも大きくなったか、および/または時間の不確定性がおよそ50msより大きくなったか、つまり10秒を超えたか判定することができる。受信した信号が弱すぎてzカウントを判定できない場合には、コード位相雑音がより高い。50ms未満の時間誤差に起因する衛星位置の算定誤差による位置の不確定性の劣化は、位置の不確定性がコード位相雑音を越えるところまではいかない。zカウントを使わない測位におけるモデル作成は10秒を超えると不確定になる。真の時間誤差は電源オフ期間の周波数誤差の積分である。最悪の場合の周波数誤差に受信機が電源オフになっている期間を乗算することによって真の時間誤差を近似することができる。温度補正法を用いて許容可能な電源オフ時間を延長することができる。
【0023】
DSP114はさらに、位置および時間の不確定性計算機が不確定性が小さくて測位に直接進めることを示している場合には、仮のzカウント判定をスキップするロジックを含んでいる。そうしたロジックは、zカウントを使わずにわずか3つの衛星を用いてウォームスタートから初期測位を得ることができる。それについては図2にさらに詳細に述べている。
【0024】
「クライアント側」は、27.456MHzのマスタクロック(MCLK)水晶発振器112、ホストプロセッサ(CPU)124、基準水晶温度センサ(T)126、水晶温度周波数モデル128、およびMCLKのミリ秒をモニタするミリ秒エポックモニタ130を含んでいる。クライアントCPU124とDSP114との通信はシリアルチャネル116で行なわれる。クライアントCPU124上で走行しているオペレーティングシステムは、そうした通信を制御するので、航法以外の作業を行なっていることがある。したがって、クライアント側で維持されている時刻を初期化に役立つほどうまくDSP114に通信することはできない。DSP114が役に立つほど正確な時刻をパワーダウン時にも維持させようとする場合、RTC117のようなローカルタイマーを有していなければならない。DSP114はGPSシステム時刻に対してRTC117のカウントオフセットをキャリブレートし、この偏差(bias)を後にRTC117のカウントを評価するときに差し引くことができる。
【0025】
RTC117のカウントは、GPSシステム時刻のミリ秒(msec)間隔でのみ読み取るように同期化されている。これによって、必要な50ミリ秒よりも優れた精度を提供する一定読み出しが保証される。カウンタがアドホックでしか読み出さないとしたら、50ミリ秒の精度は不可能である。受信機は測位ができたら、はっきりしたミリ秒でGPS時刻がわかるので、ほとんど誤差なしに時刻をミリ秒まで伝播可能である。受信機を再スタートさせると、別のGPSミリ秒が読み出される。最後の測位でのカウンタと現時点のミリ秒で読み出された現在値との差を加算することによって、どの時刻がその新たなミリ秒と関連付けるか知ることができる。
【0026】
一つの実施例において、低周波数ウォッチタイプの水晶発振器118はおよそ32.768KHzで動作し、基本的な水晶の周波数の許容差±20ppmを有する。例えば、従来のクォーツウォッチの発振器の水晶。
【0027】
32.768KHzの範囲で動作する水晶発振器は、もっと高い周波数で走行する発振器よりも動作するのに要するパワーがはるかに少ない。これは主として、より高い周波数で発生するAC信号の容量性負荷の増大に起因している。
【0028】
電池120は携帯操作(portable operation)を提供し、ユーザが遮断できる動作電力を供給する。ユーザは休眠電力をオフにすることはできないので、そうした休眠電力によって低周波数発振器118およびRTCカウンタ117はオン状態に保持される。
【0029】
高感度の航法受信機が再び目覚めたとき、2つの基本的な不確定性、例えば、位置および時間の不確定性がある。位置の不確定性がコード位相アンビギュイティ距離の半分未満で、時間の不確定性が50ミリ秒未満の場合には、入手し難い情報を使用しなくていいから、ショートカットを用いて高速なウォームスタート測位を提供できる。これには最低で3つの衛星が必要である。時間の不確定性が10秒未満の場合には、各衛星に対するzカウントは回避できるけれども、最低で4つの衛星が必要になる。
【0030】
本発明の実施例は、低周波数発振器118およびRTCカウンタ117をGPSシステム時刻に対してキャリブレートし、その得たカウントを用いてその後ウォームスタート時に受信機のクロックをリセットすることによって、再びパワーアップした後の時間の不確定性を減少させる。具体的に言えば、信号の非常に弱い環境では、航法データを衛星の送信から直接に復調することはできない。
【0031】
図2に、本発明の方法の実施例を図示し、大まかな参照番号200で示している。正確なGPSシステム時刻が使用可能であったコールドスタートおよび初期化後に、ステップ202で、GPS測位からGPS時刻を計算できるときにミリ秒の割り込みでカウンタを読み取ることによってタイマーをキャリブレートする。例えば、図1のRTCカウンタ117を使用できる。ステップ204で、航法受信機はパワーダウンされるが、タイマーは、例えば、図1に表示したように電池で走行し続ける。ステップ206のように、GPS航法受信機を再びスタートさせたとき、位置の不確定性および時間の不確定性がある。受信機がどれだけの間パワーダウンしていたか、したがって位置および時間の不確定性がどれだけあるか計算するために、例えば、DSP114におけるプロセスによって、タイマーから情報を得る。例えば、位置の不確定性は、可能な最大ユーザ速度にデルタ時間(ΔT)を掛けたものである。時間の不確定性は、水晶の周波数ドリフトにデルタ時間(ΔT)を掛けたものである。
【0032】
ステップ208で、位置不確定性のテストを行なう。位置の不確定性がコード位相アンビギュイティ距離のほぼ半分、つまり1ミリ秒のコード位相の半分の伝播距離を越えていれば、ステップ210を用いて3つの衛星に対するzカウントを得る。これにより不確定性がコード位相アンビギュイティ距離の半分未満に減り、4つ目の衛星がなくてもグリッド探索法を用いて作業を進めることができる。
【0033】
位置の不確定性がコード位相アンビギュイティ距離の半分未満まで減ったら、或いは半分未満であると判定されたら、ステップ212を用いて時間の不確定性が50ms未満かどうか調べることができる。そうならば、ステップ214で、zカウントを用いずに衛星3つだけで、測位を決めることができる。ステップ216を用いて時間の不確定性が10秒未満であるかどうか調べる。そうならば、ステップ218で、zカウントを使わずに測位を判定するけれども、その場合には4つの衛星が必要である。そうでなければ、ステップ210でzカウントを少なくとも一つ得る。
【0034】
信号の弱い環境で高感度航法衛星受信機のウォームスタートを速める本発明の方法の実施例は、2つの異なったセッションを有する。GPS受信機を用いた第1セッション時には、GPS衛星が捕捉され、ユーザ位置の測位が生成される。次に、受信機のミリ秒でGPSシステム時刻が解明される。GPS受信機内に装備された水晶発振器駆動のタイマーからカウントが読み取られ、受信機のミリ秒に対してキャリブレートされる。タイマーから得たカウントと取得したGPSシステム時刻とがメモリにログとして記録される。その後、パワーダウンして第1セッションが終わる。
【0035】
再びパワーアップして第2セッションが始まるが、その間ずっとタイマーはオン状態に保持され、カウントを続行している。タイマーのカウントが受信機のミリ秒で読み出され、第1セッションでメモリに記憶された最後のカウントを減算して、GPS受信機が電源オフになっていたクロック数が決められる。最後のわかっているGPSシステム時刻までのクロック数を用いて受信機の時刻が設定される。そのために、位置の不確定性がある特定のしきい値を超えていないときには、サーバに時間のかかる或いは入手可能でないNAVデータを求める要求を回避することができる。
【0036】
ここで説明したようなおよそ32KHzでクロックされるタイマーは10マイクロワット未満で動作可能である。温度測定を周期的に行なって、計算している受信機が電源オフになっていた期間をさらに微調整することもできる。例えば、オフ時間全体を構成期間(constituent periods)に構文解析する。
【0037】
現時点で好適な実施例によって本願を説明してきたが、開示を限定として解釈するべきでないと理解するべきである。上記の開示を読めば、当業者ならば多種多様な変形例および修正例が明白になることは疑いの余地がない。したがって、発明の「真の」精神および範囲から逸脱しない限りにおいて、あらゆる変形例および修正例も特許請求の範囲に含まれるものと解釈されるはずであると考える。
【図面の簡単な説明】
【0038】
【図1】サーバがクライアントをサポートし、情報がインターネットで通信される、本発明のネットワークシステムの実施例の機能ブロック図。
【図2】本発明の方法の実施例のフローチャート図。
【符号の説明】
【0039】
108 低雑音アンテナ
110 GPS SAWフィルタ
112 RF ASIC
113 IF SAWフィルタ
114 DSP ASIC
117 RTCカウンタ
120 電池
124 CPU
128 水晶モデル
130 ミリ秒エポック
134 ネットワーク
140 基準局マネージャ
142 ロケーションサーバ
202 GPSシステム時刻に対してタイマーをキャリブレート
204 航法受信機をパワーダウンするが、タイマーはカウントを続行
206 航法受信機をパワーアップ
208 位置の不確定性は150 km未満か?
210 少なくとも3つの衛星に対してzカウントを取得することによって位置の不確定性を150 km未満に低減
212 時間の不確定性は50ミリ秒未満か?
214 先ず最初にzカウントを取得することなく最低3つの衛星を用いて測位を決定
216 時間の不確定性は10秒未満か?
218 先ず最初にzカウントを取得することなく最低4つの衛星を用いて測位を決定
220 少なくとも一つzカウントを取得
【特許請求の範囲】
【請求項1】
航法衛星受信機システムであって、
航法測位を得られるようにGPS電波周波数(RF)段およびデジタル信号プロセッサ(DSP)を含み、
GPS-RFが受信するGPS衛星の直接送信が弱すぎてGPS航法データを直接に復調できない、あるいは古過ぎて役に立たないときのDSP用のGPS航法データのネットワークソースを含み、
DSPに接続され、DSPがパワーダウンしているとき時間ベースのカウントを維持可能なタイマーを含み、
後からGPSシステム時刻を再構築する際に使用するためにGPSシステム時刻をタイマーのカウントと比較するためのキャリブレータを含み、
位置および時間の不確定性がある特定の限度を超えているかどうか判定するためにDSP内に配置された位置および時間不確定性計算機を含み、
前記不確定性が前記特定の限度を超えていなければ、先ず最初にzカウントを得ることなく測位を生成するためにDSPがパワーアップされたとき前記時間ベースのカウントを用いるためにDSP内に配置された航法計算機を含む、航法衛星受信機システム。
【請求項2】
タイマーと関連付けられ、DSPがパワーダウンしているときに実質的な節電を可能にするウォッチタイプの水晶発振器を、
さらに含む請求項1に記載のシステム。
【請求項3】
位置および時間不確定性計算機は、位置の不確定性がコード位相アンビギュイティ距離のおよそ半分を超えているかどうか判定し、
航法計算機は、位置の不確定性がコード位相アンビギュイティ距離の半分を超えている場合には、位置の不確定性をコード位相アンビギュイティ距離の半分未満に減少させる測位を可能にして、その後の測位にはzカウントも衛星も要らなくなるように、少なくとも3つの衛星に対してzカウントを一つ得る、
請求項1に記載のシステム。
【請求項4】
位置および時間の不確定性計算機は、位置の不確定性がコード位相アンビギュイティ距離の半分を超えていないか判定すると共に、時間の不確定性が信号の弱い状況に対する最大時間誤差を越えてはいるけれども10秒には満たないかどうか判定し、
航法計算機は、時間の不確定性が前記信号の弱い状況に対する最大時間誤差を越えてはいるけれども10秒には満たない場合には、4つ目の衛星を捕捉するが、zカウントは使わずに作業を進める、
請求項1に記載のシステム。
【請求項5】
位置および時間の不確定性計算機は時間の不確定性がおよそ10秒を越えているかどうか判定し、
航法計算機は時間の不確定性が10秒を越えている場合にはzカウントを一つ取得し、その後時間の不確定性を50msec未満に減らすことができる、
請求項1に記載のシステム。
【請求項6】
信号の弱い環境で高感度航法衛星受信機のウォームスタートを速めるための方法であって、
GPS受信機を用いた第1セッション時に、GPS衛星を捕捉し、ユーザ位置の測位を生成して、受信機のミリ秒でGPSシステム時刻を解明するステップと、
前記GPS受信機の中に装備された水晶発振器駆動のタイマーからカウントを読み出し、そのカウントを前記受信機ミリ秒に対してキャリブレートするステップと、
前記タイマーから得たカウントおよび取得したGPSシステム時刻をログとしてメモリに記録するステップと、
前記第1セッションを終えるためにパワーダウンして第2セッションを開始するために再びパワーアップし、その間ずっと前記タイマーはオン状態に維持され、カウントを続行するステップと、
受信機のミリ秒で前記タイマーのカウントを読み出し、前記第1セッションで前記メモリに記憶された最後のカウントを減算して、GPS受信機が電源オフになっていた電源オフ期間を判定するステップと、
前記電源オフ期間をわかっている最後のGPSシステム時刻に加算して受信機の時刻を設定するステップとを含む方法。
【請求項7】
前記位置の不確定性がコード位相アンビギュイティ距離のおよそ半分を超えている場合には、不確定性をコード位相アンビギュイティ距離の半分未満に減らすために3つの衛星に対するzカウントを取得する、
ステップをさらに含む請求項6に記載の方法。
【請求項8】
現在のタイマーのカウントを読み出してそれをキャリブレートするステップで得たシステム時刻に加算することによって時間の不確定性が10秒未満かどうか調べ、そうならば、zカウントを用いず、少なくとも4つの衛星を用いて位置の測位を判定する、
ステップをさらに含む、請求項6に記載の方法。
【請求項9】
前記タイマーをおよそ32KHzでクロックさせ、10マイクロワットに満たない電力消耗で動作させる、
ステップをさらに含む、請求項6に記載の方法。
【請求項1】
航法衛星受信機システムであって、
航法測位を得られるようにGPS電波周波数(RF)段およびデジタル信号プロセッサ(DSP)を含み、
GPS-RFが受信するGPS衛星の直接送信が弱すぎてGPS航法データを直接に復調できない、あるいは古過ぎて役に立たないときのDSP用のGPS航法データのネットワークソースを含み、
DSPに接続され、DSPがパワーダウンしているとき時間ベースのカウントを維持可能なタイマーを含み、
後からGPSシステム時刻を再構築する際に使用するためにGPSシステム時刻をタイマーのカウントと比較するためのキャリブレータを含み、
位置および時間の不確定性がある特定の限度を超えているかどうか判定するためにDSP内に配置された位置および時間不確定性計算機を含み、
前記不確定性が前記特定の限度を超えていなければ、先ず最初にzカウントを得ることなく測位を生成するためにDSPがパワーアップされたとき前記時間ベースのカウントを用いるためにDSP内に配置された航法計算機を含む、航法衛星受信機システム。
【請求項2】
タイマーと関連付けられ、DSPがパワーダウンしているときに実質的な節電を可能にするウォッチタイプの水晶発振器を、
さらに含む請求項1に記載のシステム。
【請求項3】
位置および時間不確定性計算機は、位置の不確定性がコード位相アンビギュイティ距離のおよそ半分を超えているかどうか判定し、
航法計算機は、位置の不確定性がコード位相アンビギュイティ距離の半分を超えている場合には、位置の不確定性をコード位相アンビギュイティ距離の半分未満に減少させる測位を可能にして、その後の測位にはzカウントも衛星も要らなくなるように、少なくとも3つの衛星に対してzカウントを一つ得る、
請求項1に記載のシステム。
【請求項4】
位置および時間の不確定性計算機は、位置の不確定性がコード位相アンビギュイティ距離の半分を超えていないか判定すると共に、時間の不確定性が信号の弱い状況に対する最大時間誤差を越えてはいるけれども10秒には満たないかどうか判定し、
航法計算機は、時間の不確定性が前記信号の弱い状況に対する最大時間誤差を越えてはいるけれども10秒には満たない場合には、4つ目の衛星を捕捉するが、zカウントは使わずに作業を進める、
請求項1に記載のシステム。
【請求項5】
位置および時間の不確定性計算機は時間の不確定性がおよそ10秒を越えているかどうか判定し、
航法計算機は時間の不確定性が10秒を越えている場合にはzカウントを一つ取得し、その後時間の不確定性を50msec未満に減らすことができる、
請求項1に記載のシステム。
【請求項6】
信号の弱い環境で高感度航法衛星受信機のウォームスタートを速めるための方法であって、
GPS受信機を用いた第1セッション時に、GPS衛星を捕捉し、ユーザ位置の測位を生成して、受信機のミリ秒でGPSシステム時刻を解明するステップと、
前記GPS受信機の中に装備された水晶発振器駆動のタイマーからカウントを読み出し、そのカウントを前記受信機ミリ秒に対してキャリブレートするステップと、
前記タイマーから得たカウントおよび取得したGPSシステム時刻をログとしてメモリに記録するステップと、
前記第1セッションを終えるためにパワーダウンして第2セッションを開始するために再びパワーアップし、その間ずっと前記タイマーはオン状態に維持され、カウントを続行するステップと、
受信機のミリ秒で前記タイマーのカウントを読み出し、前記第1セッションで前記メモリに記憶された最後のカウントを減算して、GPS受信機が電源オフになっていた電源オフ期間を判定するステップと、
前記電源オフ期間をわかっている最後のGPSシステム時刻に加算して受信機の時刻を設定するステップとを含む方法。
【請求項7】
前記位置の不確定性がコード位相アンビギュイティ距離のおよそ半分を超えている場合には、不確定性をコード位相アンビギュイティ距離の半分未満に減らすために3つの衛星に対するzカウントを取得する、
ステップをさらに含む請求項6に記載の方法。
【請求項8】
現在のタイマーのカウントを読み出してそれをキャリブレートするステップで得たシステム時刻に加算することによって時間の不確定性が10秒未満かどうか調べ、そうならば、zカウントを用いず、少なくとも4つの衛星を用いて位置の測位を判定する、
ステップをさらに含む、請求項6に記載の方法。
【請求項9】
前記タイマーをおよそ32KHzでクロックさせ、10マイクロワットに満たない電力消耗で動作させる、
ステップをさらに含む、請求項6に記載の方法。
【図1】



【図2】
【図2】
【公開番号】特開2006−215027(P2006−215027A)
【公開日】平成18年8月17日(2006.8.17)
【国際特許分類】
【出願番号】特願2006−18574(P2006−18574)
【出願日】平成18年1月27日(2006.1.27)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【出願人】(501396026)イーライド,インク. (10)
【氏名又は名称原語表記】eRide,Inc.
【住所又は居所原語表記】3450 California Street San Francisco,Calif ornia 94118−1837,United States of America
【Fターム(参考)】
【公開日】平成18年8月17日(2006.8.17)
【国際特許分類】
【出願日】平成18年1月27日(2006.1.27)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【出願人】(501396026)イーライド,インク. (10)
【氏名又は名称原語表記】eRide,Inc.
【住所又は居所原語表記】3450 California Street San Francisco,Calif ornia 94118−1837,United States of America
【Fターム(参考)】
[ Back to top ]