
航法装置、航法システム、航法測位方法、および車両
【課題】 搬送波差分型全地球測位システム(GPS)受信機とレーザスキャナを有する自律陸上用車両(AGV)のための水平航法システムを提供する。高精度の車両航法システムは先進AGVに強く求められている。高性能のRTK−GPS受信機によっても高い測位精度は得られるが、高い建物やその他の障害物により遮蔽された環境下では、その性能は著しく低下する。
【解決手段】 本発明の航法システムによれば、こうした苛酷な環境下であっても、正確なGPS測位に必要なデシメートルレベルの測位精度が得られる。水平航法システムは低価格の光ファイバージャイロ(FOG)と精密なオドメータから成る。航法誤差は密結合の拡張カルマンフィルタ(EKF)を使用して推定する。EKFの測定値としては二周波数GPS受信機からの二重差分型符号と搬送波位相及びレーザスキャナ測定から生じる相対位置がある。
【解決手段】 本発明の航法システムによれば、こうした苛酷な環境下であっても、正確なGPS測位に必要なデシメートルレベルの測位精度が得られる。水平航法システムは低価格の光ファイバージャイロ(FOG)と精密なオドメータから成る。航法誤差は密結合の拡張カルマンフィルタ(EKF)を使用して推定する。EKFの測定値としては二周波数GPS受信機からの二重差分型符号と搬送波位相及びレーザスキャナ測定から生じる相対位置がある。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、おもに慣性及び衛星航法を使用した航法システムに関するものである。例えば、搬送波位相ディファレンシャルGPSとレーザスキャナ補強による自律車両航法システムに適用すると好適である。
【背景技術】
【0002】
本発明は以下の参考文献リストに列挙した文献に引用及び記載された技術を使用しており、明細書中の記載には参照番号を括弧書きしてその引用を示している。
【非特許文献1】ポール・デ・ヨング、クリスチャン・ティベリウス著『整数アンビギュイティ推定の為のラムダ法:実装面』LGRシリーズ12 デルフト工業大学 1996年8月
【非特許文献2】ルイ・ヒロカワ、コウイチ・サトウ、ケンジ・ナカクキ著『低価格MEMS IMUを用いた密結合GPS/INS航法の設計と評価』GNSSシンポジウム2003 日本東京 2003年11月
【非特許文献3】テツロウ・イマキイレ、ユウキ・ハタナカ、ヨウタ・クマキ、アツシ・ヤマギワ著『GEONET:日本の全国GPS網』GIS開発8巻3号 2004年3月
【非特許文献4】J.タキグチ、J.ハラム 『屋外環境下で用いる自律移動システムに関する研究』(パート3:チェーンフォームによるノンホロノミック移動ロボットのローカルパス計画)IEEE国際車両電子会議 中国長春 1999年9月
【非特許文献5】K.オオノ、T・ツボウチ 『屋外におけるディファレンシャルGPSとオドメトリのデータ融合による建物間の移動ロボットの航法』IEEEロボットとオートメーション国際会議 第2巻 1978−1984頁 2003年
【非特許文献6】サチン・モディ 『自律案内車両の為の3つの障害回避法の比較』修士論文 シンシナティ大学 2002年
【非特許文献7】ポール・デ・ヨング、クリスチャン・ティベリウス 『ラムダ法による整数アンビギュイティ推定』IAGシンポジウム「地上、空間、宇宙空間へのGPS適用の傾向」第21回IUGG総会 アメリカ合衆国コロラド州ブルダー 1995年7月
【非特許文献8】ロバートM.ロジャーズ 『統合航法システムにおける応用数学』AIAAエデュケーション・シリーズ第2編 2003年10月
【非特許文献9】S.スッカリエ、E.ネボット 『自律陸用車両適用の為の高整合IMU/GPS航法ループ』IEEEロボットとオートメーション会報 15巻3号 572−578頁 1999年6月 上記参考文献リスト記載の各文献の内容を引用によって本明細書に組み入れる。
【発明の開示】
【発明が解決しようとする課題】
【0003】
車両が多くの障害物をすり抜けて行くことを可能にする屋外航法システムの開発は、GPS受信機付きの自律陸上用車両にとって重要な課題である(非特許文献4、非特許文献6)。低価格慣性センサと高性能GPS受信機を統合した航法システムは広い範囲の移動体システムに適用できる。GPSとIMUまたはオドメトリによる航法システムは広く用いられている(非特許文献9、非特許文献5)。しかしながら、閉塞性が高い環境においては、高い建物その他の障害物により性能はかなり低下する。密結合GPS/INSシステムは疎結合システムに比べ、特に衛星視界が劣悪な場合、GPS擬似距離の誤差のより良い検出及びより高精度の測位等いくつかの利点がある。
【課題を解決するための手段】
【0004】
この発明の一側面によれば、物体の位置及び方向を決定する航法装置において、速度検出器の出力とヨーレート検出器の出力とに基づいて物体の位置及び方向を演算する航法演算部と、全地球測位衛星から受信した搬送波位相と擬似距離とに基づいて、(1)速度検出器の誤差と、(2)ヨ−レート検出器の誤差と、(3)物体の位置誤差及び方向誤差と、(4)搬送波の整数値バイアスとを推定する推定部とを備え、航法演算部は、推定部が推定した位置誤差及び方向誤差に基づいて物体の位置及び方向を更新することを特徴とする航法装置を提供する。
【0005】
また、本発明の一つの実施の形態は上記した航法装置を搭載する車両である。このような車両は陸上用車両に好適である。
【0006】
さらに、本発明の別の側面によれば、物体の位置及び方向を決定する航法方法において、速度検出器の出力とヨーレート検出器の出力とに基づいて物体の位置及び方向を演算し、全地球測位衛星から受信した搬送波位相と擬似距離とに基づいて、(1)速度検出器の誤差と、(2)ヨ−レート検出器の誤差と、(3)物体の位置誤差及び方向誤差と、(4)搬送波の整数値バイアスとを推定し、推定した位置誤差及び方向誤差に基づいて物体の位置及び方向を更新することを特徴とする航法測位方法を提供する。
【0007】
本発明の別の実施の形態によれば、慣性及び衛星航法を用いて自律車両の位置及び方向を決定する航法システムにおいて、(1)自律車両の速度を検出する速度検出器と、(2)自律車両のヨーレートを検出するヨーレート検出器と、(3)既知のランドマークの位置データを記憶するランドマークデータベースと、(4)自律車両に装着し車両から既知のランドマークまでの距離を測定する距離測定器と、(5)速度検出器が検出した速度とヨーレート検出器が検出したヨーレートとに基づいて自律車両の位置及び方向を演算する航法演算部と、(6)全地球測位衛星から受信した搬送波位相と擬似距離とに基づいて、速度検出器の誤差と、ヨ−レート検出器の誤差と、物体の位置誤差及び方向誤差と、搬送波の整数値バイアスとを推定する推定部とを備え、航法演算部は、推定部が推定した位置誤差及び方向誤差に基づいて自律車両の位置及び方向を更新することを特徴とする航法システムを提供する。
【0008】
さらに、本発明の別の実施の形態は上記した航法システムを搭載する車両である。このような車両は陸上用車両に好適である。
【発明の効果】
【0009】
本発明により、衛星視界が劣悪な場合などにおいても、GPSの測位精度が向上する。
【発明を実施するための最良の形態】
【0010】
実施の形態1.
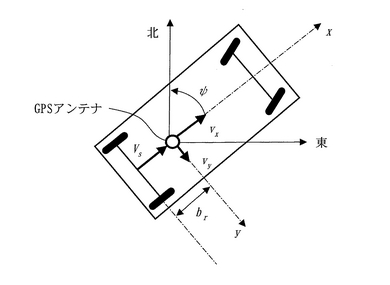
本発明の航法システムは水平ストラップダウン航法演算及び拡張カルマンフィルタ(Extended Kalman filter:EKF)から成る。図1は車両の水平運動モデルである。局所水平フレームでのストラップダウン演算は、例えば、低価格の光ファイバージャイロ(Fiber Optic Gyro:FOG)のようなレートジャイロを用いた位置と方向(ヨー角度)の更新、及びEKFにより補正したオドメータの入力によって行われる。MEMS(Micro Electro Mechanical Systems:微小電気機械システム)ジャイロや振動ジャイロを使用しても良い。車両の位置をGPSアンテナの位相中心とし、局所NED(North−East−Down:北、東、下方向)フレームにおける位置ダイナミクスは式(1)(2)により求める。
【0011】
【数4】

ここで、vxとvyは車体軸速度であり式(3)を満たす。
【0012】
【数5】
Vsとrsはそれぞれオドメータが測定した補正速度及びFOGが測定したヨーレートである。brは後方車輪軸とGPSアンテナ位相中心との間の水平距離である。
【0013】
補正速度及びヨーレートは式(4)(5)により求める。
【0014】
【数6】
ここでVodはオドメータ速度、rはヨーレート、eodはオドメータ倍率誤差、egはジャイロ倍率誤差、bgはジャイロバイアス誤差である。方向ダイナミクスは式(6)によってモデル化される。
【0015】
【数7】
ストラップダウン演算は式(1)〜(6)に基づき行われる。ここで、式(1)〜(6)における速度及びヨーレートは図2に示すようにカルマンフィルタが推定するセンサ誤差信号により補正されない場合も補正される場合もある。
【0016】
EKFは位置誤差p=[ned]T(北、東、下)、センサ誤差s(方向誤差ε、オドメータ倍率誤差ev、ジャイロ倍率eg、ジャイロバイアスbg)DD(double differenced:二重差分型)搬送波位相の浮動小数点アンビギュイティベクトルaから成る状態量x=[psa]を推定する。状態量の次数は追従する衛星の数による。12チャネル二周波数受信機であれば次数は29となる。
【0017】
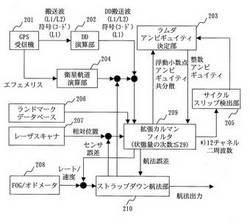
図2はEKF209を備えた本発明の一つの実施の形態による航法システムのブロック図である。FOG/オドメータ208からヨーレートと速度をストラップダウン航法部210へ入力する。レーザスキャナ207からEKF209へ相対位置情報を入力する。以下に述べるようにランドマークデータベース206は少なくともひとつの既知のランドマークの座標データを提供する。GPS受信機201、DD演算部202、衛星軌道演算部204はEKF209へ衛星航法情報を入力する。以下に詳述するように、ラムダ(LAMBDA)アンビギュイティ決定部203とサイクルスリップ検出部205は搬送波の整数値バイアスにおけるアンビギュイティを決定する。
【0018】
カルマンフィルタ209はストラップダウン航法部210における誤差とセンサ入力の誤差を補正できるようにフィードバック形式となっている。ステートxのダイナミクスは線形差分方程式(7)のように表せる。
【0019】
【数8】
ここでFはシステムマトリクス、wはプロセスノイズベクトルである。
【0020】
システムマトリクスFはシステム誤差ダイナミクスから導かれ、以下の式(8)(9)(10)のように表せる。
【0021】
【数9】
ここでτgはジャイロバイアスの相関時間である。
【0022】
高度、浮動小数点アンビギュイティ、センサ入力といったその他の状態量の誤差ダイナミクスはランダムウォークプロセスモデルとして定式化される。
【0023】
【数10】
カルマンフィルタのダイナミクスは離散形で表される。システムФの遷移マトリクスは式(12)のように演算する。
【0024】
【数11】
ここで、τはサンプル時間である。
【0025】
カルマンフィルタ演算は時間伝播と測定値更新から成る。共分散マトリクスPの時間伝播は式(13)により求める。
【0026】
【数12】
ここでQdはプロセスノイズマトリクスである。
【0027】
EKFの測定値更新は以下の式(14)(15)(16)で表せる。
【0028】
【数13】
ここで、Hは測位マトリクス、Kはカルマンゲインマトリクス、Rは測位ノイズマトリクス、Δzは測定値残差である。
【0029】
位置、方向角、センサ誤差、及び浮動小数点アンビギュイティは式(17)により更新する。
【0030】
【数14】
ここでmは観測衛星数−1である。
【0031】
2つの異なる測定値、GPSによるDD距離、レーザスキャナによる相対距離を用いる。測定値マトリクスHと測定値剰余Δzは下記のように設定する。二周波DD搬送波位相とコード位相はフィルタの測定値として用いる。
【0032】
整数アンビギュイティを適切に求めた後、EKFの次数を7まで下げ、アンビギュイティを決定した二周波二重差分型(DD)搬送波位相のみを測定値として用いる。
【0033】
EKFの測定値マトリクスHは式(18)のように設定する。
【0034】
【数15】
ここでCneは局所水平フレームとECEF(Earth−Centered Earth−Fixed)フレーム間の方向余弦マトリクス、Aは各衛星の幾何学的射影マトリクス、λ1、λ2はそれぞれGPSのL1,L2の波長を表す。
【0035】
GPS測定値更新の測定値マトリクスRはDD観測に基づいているため相関性が高い。測定値残差Δzは式(19)により求める。
【0036】
【数16】
ここでΔρcはDD幾何距離、ΔρC1、ΔρL1、ΔρL2は観測値に基づくDDコードと搬送波位相、a1とa2はL1とL2のDDアンビギュイティである。
【0037】
【数17】
レーザスキャナが測定した相対位置もまた位置誤差および方向誤差を補正するための追加測定値として用いる。コーナーランドマークはランドマークデータベース中に記憶された既知の位置を持ち、このコーナーランドマークを用いて、ランドマークとレーザスキャナセンサ間の相対位置を測定することにより誤差を推定する。
【0038】
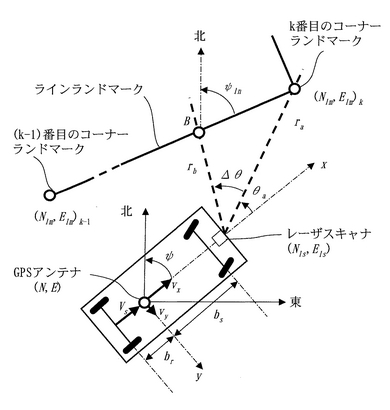
ラインランドマークは二つの連続するコーナーランドマークを結ぶ線によって成る。ラインランドマークとスキャナ間の相対距離も測定可能である。ラインランドマークの相対位置は測定できないが、相対角度は測定可能である。ラインランドマークを伴うコーナーランドマーク更新は演算効率のために用いる。図3はランドマーク更新の定義を表している。
【0039】
コーナーランドマークとレーザスキャナ間の距離raはレーザスキャナによって測定する。コーナーランドマークの位置は測定距離の不連続性によって検出可能である。ボディフレームの方向θaもセンサによって測定する。レーザスキャナとコーナーランドマーク間の距離ベクトルは車体軸と航法軸では式(21)(22)のように設定する。
【0040】
【数18】
センサの位置は車両の位置と方向により式(23)のように演算する。
【0041】
【数19】
ここでbsはGPSアンテナとレーザスキャナとの間の距離である。
【0042】
相対距離rcと車体軸の方向θcは式(24)(25)により求める。
【0043】
【数20】
【0044】
【数21】
【0045】
【数22】
ここでΔθは好ましくは30度とする。
【0046】
測定値残差Δzは式(28)により設定する。
【0047】
【数23】
ここでψcはランドマークデータベースから取得したラインランドマークの方向角である。
【0048】
測定値マトリクスHは式(29)により設定する。
【0049】
【数24】
【0050】
【数25】
最小2乗基準を持つ整数アンビギュイティをレストテスト及び残差テストを用いて確認する。レストテストの閾値レベルは測定値数と信頼レベルの関数として設定する。F分散の99%信頼レベルが好ましい。
【0051】
図20は本発明の一つの実施の形態による物体の位置及び方向を決定する方法を示している。ステップ2001では、物体の位置及び方向は次の運動方程式により演算される。
【0052】
【数26】
ここで、N,E,Dは位置の成分、φは方向、Vは速度検出器が測定した速度、rはヨーレート検出器が測定したヨーレート、tは時間、bは所定の距離である。次に、ステップ2002では、二重差分型搬送波位相の浮動小数点アンビギュイティベクトルを拡張カルマンフィルタを用いて推定し、搬送波の整数値バイアスにおけるアンビギュイティは推定した二重差分型搬送波位相の浮動小数点アンビギュイティベクトルに基づきラムダ法を用いて決定する。ステップ2003では、全地球測位衛星から受信した搬送波位相と擬似距離に基づき、(1)速度検出器の誤差、(2)ヨーレート検出器の誤差、(3)対象物の位置誤差及び方向誤差、(4)搬送波の整数値バイアスを推定する。ステップ2004では、既知のランドマークと物体との間の相対距離を、物体に搭載した距離測定器が測定した距離及び保存されている既知のランドマークの位置データに基づき推定する。さらに、推定した相対距離に基づき観測誤差を推定する。最後にステップ2005では、推定した位置誤差及び方向誤差に基づき物体の位置及び方向を更新する。
【0053】
シミュレーション
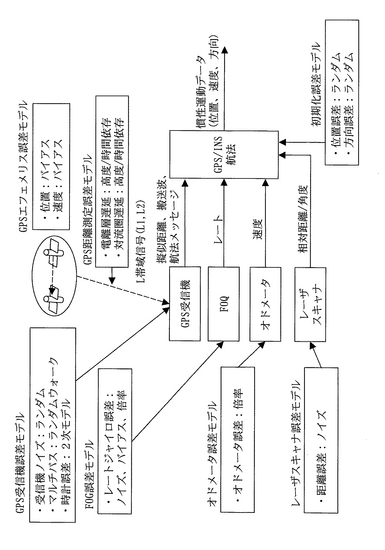
本発明の航法システム及び方法の実施の形態の設計評価を数値シミュレーションにより行った。図4は種々の誤差要因を含むシミュレーションモデルを示す。シミュレーションで使用したのは、図5に示すいくつかの高い建物の近傍を通過する水平経路である。GPS軌道はGPS週が1278のアルマナックを使ってシミュレートした。衛星のマスク角は10度とした。
【0054】
高い建物による遮蔽をシミュレートしてGPS衛星が一部利用できない状態を第一のケースで考慮する。遮蔽はt=50秒の時マスク角45度として表す。図6に観測可能な衛星のスカイプロットを示す。観測された衛星の数は10機であるが、遮蔽の後は3機の衛星しか観測されない。こうした場合には従来のRTK−GPSでは定位置を出力できない。ここで述べる密結合GPS/DR航法システムによれば、衛星の数が4機未満であっても、DD位相とコードにより測定値更新が可能である。
【0055】
シミュレーションでのセンサ誤差を式(31)により求める。
【0056】
ε=0.2度、ev=5%、eg=5%、bg=0.1度/秒 (31)
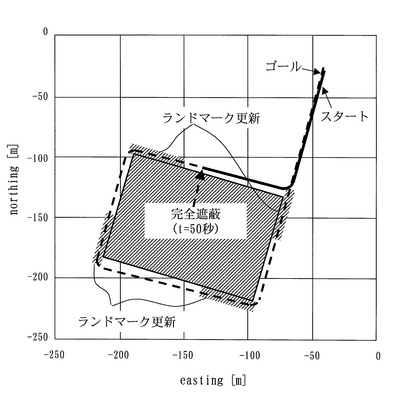
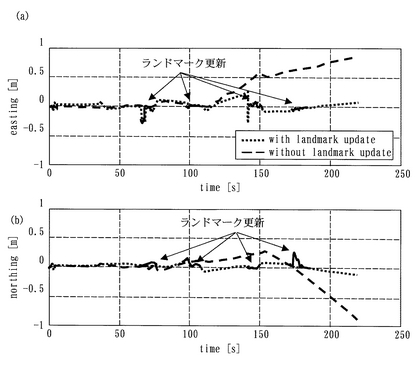
図7にシミュレーションに用いる車両の速度(velocity)、方向(heading)、ヨーレート(yaw rate)を示す。横軸は時間[秒](time[s])である。図7(a)で実線はオドメトリ(odometry)による測定値、(b)で実線はD/Rによる測定値、(c)で実線はジャイロ(gyro)による測定値、破線はそれぞれ真の値(true)を示す。EKFが推定するセンサ誤差を図8に示す。図8で(a)は方向、(b)は速度、(c)はジャイロ誤差(gyro s/f error)、(d)はジャイロバイアス(gyro bias)を示す。推定誤差は真の値に収束している。EKFによる位置誤差を図9に示す。図9で(a)は東方向(easting)、(b)は北方向(northing)、(c)は上方向(up)への移動による誤差を示している。比較の為に、従来の疎結合(loosely coupled)RTK−GPS/DR航法システムによる位置誤差を同じ図中に示す。密結合(tightly coupled)システムによる位置誤差は疎結合システムよりはるかに小さい。第二のケースでは、衛星完全遮蔽をt=50秒でシミュレートする。この場合は、ランドマーク更新を効果的に用いている。レーザスキャナの最大距離は30m、距離精度は4cm、角分解能は1度であると仮定する。図10に示すように距離が30m未満であれば、コーナーランドマークの前でランドマーク更新を行う。実線で示したランドマーク測定値更新、及び破線で示した真のセンサ誤差と共にEKFが推定するセンサ誤差を図11に示す。推定誤差は真の値に収束している。図12はランドマーク更新を行った場合と行わない場合の位置誤差を示す。図12で(a)は東方向、(b)は北方向への移動による誤差を示し、それぞれ実線はランドマーク更新を行った場合(with landmark update)、破線はランドマーク更新を行わない場合(without landmark update)を示している。GPS測定値が得られない場合でも位置誤差は小さい。
【0057】
野外試験(フィールドテスト)
図13に示す自律陸上用車両を野外試験に使用した。このAGV(Autonomous Ground Vehicle)は一定の地域を自律巡回する監視車両として開発された。レーザスキャナ、距離精度35mmで角分解能1度のSICK LMS291、監視用の全方位ビデオ(Omni−Directional Video:ODV)カメラ、二重周波数GPS受信機、アシュテックZエクストリーム(Ashtech Z−Xtreme)、1度/時の精度のFOG、及び高分解オドメータを備える。この車両のリアルタイム誘導とGPS/DR航法はオンボードのRT(リアルタイム)リナックス(登録商標)コンピュータ上で実行する。ここで分析したデータは2004年7月6日、鎌倉で収集したものである。藤沢でのGEONET[3]の基地局で観測した二周波数GPSデータは差分補正に使用する。測量基線長は約5kmである。観測された衛星は図6に示すものとほぼ同じである。RTK−GPS受信機によるアンビギュイティは時間の40%のみ整数解に基づく位置となり、時間の32%については解を持たない。
【0058】
現存のオンボードリアルタイム実装は疎結合航法に基づいている。密結合航法の解は後処理演算により求めた。図14と図15に野外試験での演算位置結果を示す。図14は水平位置、図15で(a)は北方向、(b)は東方向、(c)は下方向(down)の位置を示している。それぞれの図中で黒実線は整数解(fixed)を示し灰色実線は浮動小数点値(float)である。図16で(a)は観測された衛星の数(number of sats)、(b)は整数アンビギュイティの推定有効性(ambiguity validity)を示す。有効性が1であるなら、整数アンビギュイティが求められていると推定できる。密結合航法システムの場合は、位置の70%以上が整数解に基づくものである。EKFによる演算位置とRTK−GPS受信機の整数解を比較してセンチメートルレベルの精度を確認した。RTK−GPSの整数解が得られない場合は、DD搬送波位相の残差解析によって位置精度を確認した。
【0059】
ランドマーク更新は経路の二番目のコーナーで行う。図17は車両の経路とt=254秒とt=264.3秒におけるレーザスキャナ距離のプロットを示す。レーザスキャナ距離のプロットは経路方向に合わせるため車両の方向により回転する。この図はレーザスキャナによる距離測定によってコーナーが検出可能であることを示している。
【0060】
図18に、コーナーランドマークの測定相対距離及び相対角度、ラインランドマークの測定斜度を含むレーザスキャナによる二つ目のコーナーでの測定データの例を示している。図18で(a)は距離(range)、(b)は角度(angle)、(c)は傾斜度(slope)をそれぞれ示す。
【0061】
図14に示すGPS/DR位置は既に高精度であるので、GPS測定値更新無しにランドマーク更新を行う。図19にランドマーク更新による演算位置結果を示す。比較の為に、ランドマーク更新無しの結果とGPS/DR位置を同図に示す。演算位置結果はGPS/DR位置とほとんど同じである。GPS測定値が得られない場合でも、コーナーランドマーク及びラインランドマーク更新により位置精度は向上する。
【0062】
搬送波位相ディファレンシャルGPSとAGV用レーザスキャナにより補強された水平航法システムを設計し、その性能を数値シミュレーション及び野外試験によって確認した。本発明の実施の形態によれば、搬送波位相ディファレンシャルGPSとLS補強を利用した密結合航法システムを提案することで衛星視界が劣悪な場合でもデシメートルレベルの測位精度が得られる。
【図面の簡単な説明】
【0063】
【図1】陸上用の車両の動的モデル図である。
【図2】本発明の一つの実施の形態によるGPS/DR航法システムを示す図である。
【図3】ランドマーク更新を示す図である。
【図4】GPSのシミュレーションモデルを示す図である。
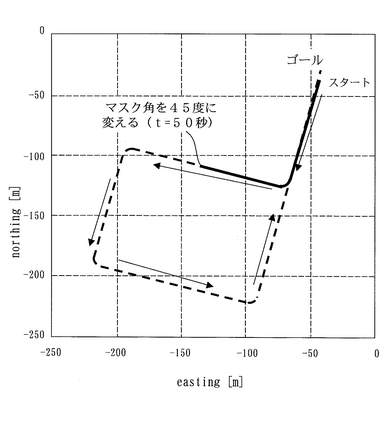
【図5】シミュレーションに用いた水平航法経路を示す図である。
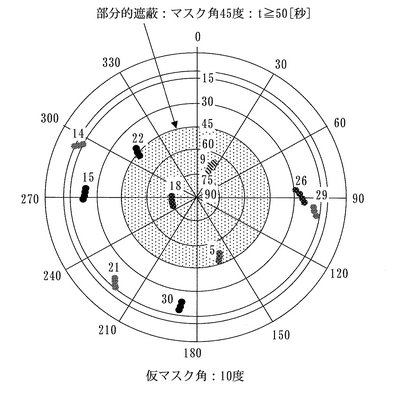
【図6】2004年7月6日に行った衛星スカイプロットを示す図である。
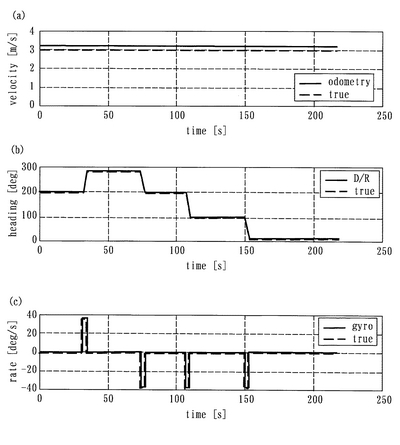
【図7】シミュレーション時の車両の速度、方向、ヨーレートを示す図である。
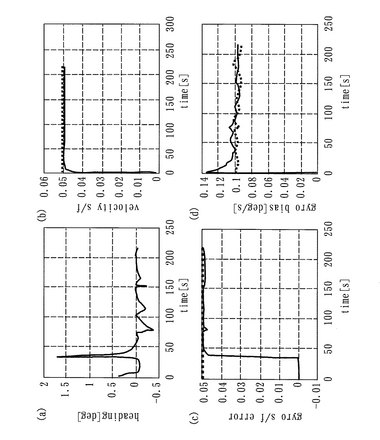
【図8】拡張カルマンフィルタが推定したセンサ誤差を示す図である。
【図9】拡張カルマンフィルタが推定した位置誤差を示す図である。
【図10】ランドマーク更新によるシミュレーションに用いた水平航法経路を示す図である。
【図11】ランドマーク更新の際の拡張カルマンフィルタが推定したセンサ誤差を示す図である。
【図12】ランドマーク更新の際の拡張カルマンフィルタが推定した位置誤差を示す図である。
【図13】自律陸上車両(AGV)を示す図である。
【図14】野外試験時のカルマンフィルタが推定した水平位置を示す図である。
【図15】野外試験時のNED位置を示す図である。
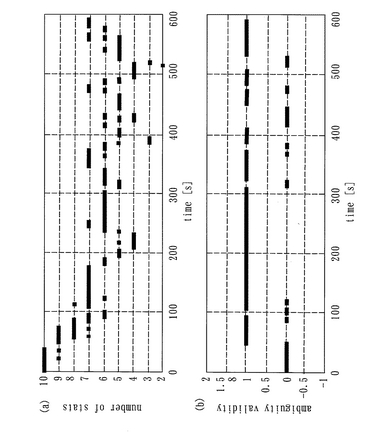
【図16】衛星数及び整数アンビギュイティの推定有効性を示す図である。
【図17】野外試験時の車両経路及びレーザスキャナの測定距離のプロットを示す図である。
【図18】野外試験時のランドマーク更新のための測定データを示す図である。
【図19】野外試験時のランドマーク更新の有無による演算位置更新を示す図である。
【図20】本発明の一つの実施の形態による方法を示す図である。
【符号の説明】
【0064】
201 GPS受信機、202 DD演算部、203 ラムダアンビギュイティ決定部、204 衛星軌道演算部、205 サイクルスリップ検出部、206 ランドマークデータベース、207 レーザスキャナ、208 FOG/オドメータ、209 拡張カルマンフィルタ、210 ストラップダウン航法部。
【技術分野】
【0001】
本発明は、おもに慣性及び衛星航法を使用した航法システムに関するものである。例えば、搬送波位相ディファレンシャルGPSとレーザスキャナ補強による自律車両航法システムに適用すると好適である。
【背景技術】
【0002】
本発明は以下の参考文献リストに列挙した文献に引用及び記載された技術を使用しており、明細書中の記載には参照番号を括弧書きしてその引用を示している。
【非特許文献1】ポール・デ・ヨング、クリスチャン・ティベリウス著『整数アンビギュイティ推定の為のラムダ法:実装面』LGRシリーズ12 デルフト工業大学 1996年8月
【非特許文献2】ルイ・ヒロカワ、コウイチ・サトウ、ケンジ・ナカクキ著『低価格MEMS IMUを用いた密結合GPS/INS航法の設計と評価』GNSSシンポジウム2003 日本東京 2003年11月
【非特許文献3】テツロウ・イマキイレ、ユウキ・ハタナカ、ヨウタ・クマキ、アツシ・ヤマギワ著『GEONET:日本の全国GPS網』GIS開発8巻3号 2004年3月
【非特許文献4】J.タキグチ、J.ハラム 『屋外環境下で用いる自律移動システムに関する研究』(パート3:チェーンフォームによるノンホロノミック移動ロボットのローカルパス計画)IEEE国際車両電子会議 中国長春 1999年9月
【非特許文献5】K.オオノ、T・ツボウチ 『屋外におけるディファレンシャルGPSとオドメトリのデータ融合による建物間の移動ロボットの航法』IEEEロボットとオートメーション国際会議 第2巻 1978−1984頁 2003年
【非特許文献6】サチン・モディ 『自律案内車両の為の3つの障害回避法の比較』修士論文 シンシナティ大学 2002年
【非特許文献7】ポール・デ・ヨング、クリスチャン・ティベリウス 『ラムダ法による整数アンビギュイティ推定』IAGシンポジウム「地上、空間、宇宙空間へのGPS適用の傾向」第21回IUGG総会 アメリカ合衆国コロラド州ブルダー 1995年7月
【非特許文献8】ロバートM.ロジャーズ 『統合航法システムにおける応用数学』AIAAエデュケーション・シリーズ第2編 2003年10月
【非特許文献9】S.スッカリエ、E.ネボット 『自律陸用車両適用の為の高整合IMU/GPS航法ループ』IEEEロボットとオートメーション会報 15巻3号 572−578頁 1999年6月 上記参考文献リスト記載の各文献の内容を引用によって本明細書に組み入れる。
【発明の開示】
【発明が解決しようとする課題】
【0003】
車両が多くの障害物をすり抜けて行くことを可能にする屋外航法システムの開発は、GPS受信機付きの自律陸上用車両にとって重要な課題である(非特許文献4、非特許文献6)。低価格慣性センサと高性能GPS受信機を統合した航法システムは広い範囲の移動体システムに適用できる。GPSとIMUまたはオドメトリによる航法システムは広く用いられている(非特許文献9、非特許文献5)。しかしながら、閉塞性が高い環境においては、高い建物その他の障害物により性能はかなり低下する。密結合GPS/INSシステムは疎結合システムに比べ、特に衛星視界が劣悪な場合、GPS擬似距離の誤差のより良い検出及びより高精度の測位等いくつかの利点がある。
【課題を解決するための手段】
【0004】
この発明の一側面によれば、物体の位置及び方向を決定する航法装置において、速度検出器の出力とヨーレート検出器の出力とに基づいて物体の位置及び方向を演算する航法演算部と、全地球測位衛星から受信した搬送波位相と擬似距離とに基づいて、(1)速度検出器の誤差と、(2)ヨ−レート検出器の誤差と、(3)物体の位置誤差及び方向誤差と、(4)搬送波の整数値バイアスとを推定する推定部とを備え、航法演算部は、推定部が推定した位置誤差及び方向誤差に基づいて物体の位置及び方向を更新することを特徴とする航法装置を提供する。
【0005】
また、本発明の一つの実施の形態は上記した航法装置を搭載する車両である。このような車両は陸上用車両に好適である。
【0006】
さらに、本発明の別の側面によれば、物体の位置及び方向を決定する航法方法において、速度検出器の出力とヨーレート検出器の出力とに基づいて物体の位置及び方向を演算し、全地球測位衛星から受信した搬送波位相と擬似距離とに基づいて、(1)速度検出器の誤差と、(2)ヨ−レート検出器の誤差と、(3)物体の位置誤差及び方向誤差と、(4)搬送波の整数値バイアスとを推定し、推定した位置誤差及び方向誤差に基づいて物体の位置及び方向を更新することを特徴とする航法測位方法を提供する。
【0007】
本発明の別の実施の形態によれば、慣性及び衛星航法を用いて自律車両の位置及び方向を決定する航法システムにおいて、(1)自律車両の速度を検出する速度検出器と、(2)自律車両のヨーレートを検出するヨーレート検出器と、(3)既知のランドマークの位置データを記憶するランドマークデータベースと、(4)自律車両に装着し車両から既知のランドマークまでの距離を測定する距離測定器と、(5)速度検出器が検出した速度とヨーレート検出器が検出したヨーレートとに基づいて自律車両の位置及び方向を演算する航法演算部と、(6)全地球測位衛星から受信した搬送波位相と擬似距離とに基づいて、速度検出器の誤差と、ヨ−レート検出器の誤差と、物体の位置誤差及び方向誤差と、搬送波の整数値バイアスとを推定する推定部とを備え、航法演算部は、推定部が推定した位置誤差及び方向誤差に基づいて自律車両の位置及び方向を更新することを特徴とする航法システムを提供する。
【0008】
さらに、本発明の別の実施の形態は上記した航法システムを搭載する車両である。このような車両は陸上用車両に好適である。
【発明の効果】
【0009】
本発明により、衛星視界が劣悪な場合などにおいても、GPSの測位精度が向上する。
【発明を実施するための最良の形態】
【0010】
実施の形態1.
本発明の航法システムは水平ストラップダウン航法演算及び拡張カルマンフィルタ(Extended Kalman filter:EKF)から成る。図1は車両の水平運動モデルである。局所水平フレームでのストラップダウン演算は、例えば、低価格の光ファイバージャイロ(Fiber Optic Gyro:FOG)のようなレートジャイロを用いた位置と方向(ヨー角度)の更新、及びEKFにより補正したオドメータの入力によって行われる。MEMS(Micro Electro Mechanical Systems:微小電気機械システム)ジャイロや振動ジャイロを使用しても良い。車両の位置をGPSアンテナの位相中心とし、局所NED(North−East−Down:北、東、下方向)フレームにおける位置ダイナミクスは式(1)(2)により求める。
【0011】
【数4】
ここで、vxとvyは車体軸速度であり式(3)を満たす。
【0012】
【数5】
Vsとrsはそれぞれオドメータが測定した補正速度及びFOGが測定したヨーレートである。brは後方車輪軸とGPSアンテナ位相中心との間の水平距離である。
【0013】
補正速度及びヨーレートは式(4)(5)により求める。
【0014】
【数6】
ここでVodはオドメータ速度、rはヨーレート、eodはオドメータ倍率誤差、egはジャイロ倍率誤差、bgはジャイロバイアス誤差である。方向ダイナミクスは式(6)によってモデル化される。
【0015】
【数7】
ストラップダウン演算は式(1)〜(6)に基づき行われる。ここで、式(1)〜(6)における速度及びヨーレートは図2に示すようにカルマンフィルタが推定するセンサ誤差信号により補正されない場合も補正される場合もある。
【0016】
EKFは位置誤差p=[ned]T(北、東、下)、センサ誤差s(方向誤差ε、オドメータ倍率誤差ev、ジャイロ倍率eg、ジャイロバイアスbg)DD(double differenced:二重差分型)搬送波位相の浮動小数点アンビギュイティベクトルaから成る状態量x=[psa]を推定する。状態量の次数は追従する衛星の数による。12チャネル二周波数受信機であれば次数は29となる。
【0017】
図2はEKF209を備えた本発明の一つの実施の形態による航法システムのブロック図である。FOG/オドメータ208からヨーレートと速度をストラップダウン航法部210へ入力する。レーザスキャナ207からEKF209へ相対位置情報を入力する。以下に述べるようにランドマークデータベース206は少なくともひとつの既知のランドマークの座標データを提供する。GPS受信機201、DD演算部202、衛星軌道演算部204はEKF209へ衛星航法情報を入力する。以下に詳述するように、ラムダ(LAMBDA)アンビギュイティ決定部203とサイクルスリップ検出部205は搬送波の整数値バイアスにおけるアンビギュイティを決定する。
【0018】
カルマンフィルタ209はストラップダウン航法部210における誤差とセンサ入力の誤差を補正できるようにフィードバック形式となっている。ステートxのダイナミクスは線形差分方程式(7)のように表せる。
【0019】
【数8】
ここでFはシステムマトリクス、wはプロセスノイズベクトルである。
【0020】
システムマトリクスFはシステム誤差ダイナミクスから導かれ、以下の式(8)(9)(10)のように表せる。
【0021】
【数9】
ここでτgはジャイロバイアスの相関時間である。
【0022】
高度、浮動小数点アンビギュイティ、センサ入力といったその他の状態量の誤差ダイナミクスはランダムウォークプロセスモデルとして定式化される。
【0023】
【数10】
カルマンフィルタのダイナミクスは離散形で表される。システムФの遷移マトリクスは式(12)のように演算する。
【0024】
【数11】
ここで、τはサンプル時間である。
【0025】
カルマンフィルタ演算は時間伝播と測定値更新から成る。共分散マトリクスPの時間伝播は式(13)により求める。
【0026】
【数12】
ここでQdはプロセスノイズマトリクスである。
【0027】
EKFの測定値更新は以下の式(14)(15)(16)で表せる。
【0028】
【数13】
ここで、Hは測位マトリクス、Kはカルマンゲインマトリクス、Rは測位ノイズマトリクス、Δzは測定値残差である。
【0029】
位置、方向角、センサ誤差、及び浮動小数点アンビギュイティは式(17)により更新する。
【0030】
【数14】
ここでmは観測衛星数−1である。
【0031】
2つの異なる測定値、GPSによるDD距離、レーザスキャナによる相対距離を用いる。測定値マトリクスHと測定値剰余Δzは下記のように設定する。二周波DD搬送波位相とコード位相はフィルタの測定値として用いる。
【0032】
整数アンビギュイティを適切に求めた後、EKFの次数を7まで下げ、アンビギュイティを決定した二周波二重差分型(DD)搬送波位相のみを測定値として用いる。
【0033】
EKFの測定値マトリクスHは式(18)のように設定する。
【0034】
【数15】
ここでCneは局所水平フレームとECEF(Earth−Centered Earth−Fixed)フレーム間の方向余弦マトリクス、Aは各衛星の幾何学的射影マトリクス、λ1、λ2はそれぞれGPSのL1,L2の波長を表す。
【0035】
GPS測定値更新の測定値マトリクスRはDD観測に基づいているため相関性が高い。測定値残差Δzは式(19)により求める。
【0036】
【数16】
ここでΔρcはDD幾何距離、ΔρC1、ΔρL1、ΔρL2は観測値に基づくDDコードと搬送波位相、a1とa2はL1とL2のDDアンビギュイティである。
【0037】
【数17】
レーザスキャナが測定した相対位置もまた位置誤差および方向誤差を補正するための追加測定値として用いる。コーナーランドマークはランドマークデータベース中に記憶された既知の位置を持ち、このコーナーランドマークを用いて、ランドマークとレーザスキャナセンサ間の相対位置を測定することにより誤差を推定する。
【0038】
ラインランドマークは二つの連続するコーナーランドマークを結ぶ線によって成る。ラインランドマークとスキャナ間の相対距離も測定可能である。ラインランドマークの相対位置は測定できないが、相対角度は測定可能である。ラインランドマークを伴うコーナーランドマーク更新は演算効率のために用いる。図3はランドマーク更新の定義を表している。
【0039】
コーナーランドマークとレーザスキャナ間の距離raはレーザスキャナによって測定する。コーナーランドマークの位置は測定距離の不連続性によって検出可能である。ボディフレームの方向θaもセンサによって測定する。レーザスキャナとコーナーランドマーク間の距離ベクトルは車体軸と航法軸では式(21)(22)のように設定する。
【0040】
【数18】
センサの位置は車両の位置と方向により式(23)のように演算する。
【0041】
【数19】
ここでbsはGPSアンテナとレーザスキャナとの間の距離である。
【0042】
相対距離rcと車体軸の方向θcは式(24)(25)により求める。
【0043】
【数20】
【0044】
【数21】
【0045】
【数22】
ここでΔθは好ましくは30度とする。
【0046】
測定値残差Δzは式(28)により設定する。
【0047】
【数23】
ここでψcはランドマークデータベースから取得したラインランドマークの方向角である。
【0048】
測定値マトリクスHは式(29)により設定する。
【0049】
【数24】
【0050】
【数25】
最小2乗基準を持つ整数アンビギュイティをレストテスト及び残差テストを用いて確認する。レストテストの閾値レベルは測定値数と信頼レベルの関数として設定する。F分散の99%信頼レベルが好ましい。
【0051】
図20は本発明の一つの実施の形態による物体の位置及び方向を決定する方法を示している。ステップ2001では、物体の位置及び方向は次の運動方程式により演算される。
【0052】
【数26】
ここで、N,E,Dは位置の成分、φは方向、Vは速度検出器が測定した速度、rはヨーレート検出器が測定したヨーレート、tは時間、bは所定の距離である。次に、ステップ2002では、二重差分型搬送波位相の浮動小数点アンビギュイティベクトルを拡張カルマンフィルタを用いて推定し、搬送波の整数値バイアスにおけるアンビギュイティは推定した二重差分型搬送波位相の浮動小数点アンビギュイティベクトルに基づきラムダ法を用いて決定する。ステップ2003では、全地球測位衛星から受信した搬送波位相と擬似距離に基づき、(1)速度検出器の誤差、(2)ヨーレート検出器の誤差、(3)対象物の位置誤差及び方向誤差、(4)搬送波の整数値バイアスを推定する。ステップ2004では、既知のランドマークと物体との間の相対距離を、物体に搭載した距離測定器が測定した距離及び保存されている既知のランドマークの位置データに基づき推定する。さらに、推定した相対距離に基づき観測誤差を推定する。最後にステップ2005では、推定した位置誤差及び方向誤差に基づき物体の位置及び方向を更新する。
【0053】
シミュレーション
本発明の航法システム及び方法の実施の形態の設計評価を数値シミュレーションにより行った。図4は種々の誤差要因を含むシミュレーションモデルを示す。シミュレーションで使用したのは、図5に示すいくつかの高い建物の近傍を通過する水平経路である。GPS軌道はGPS週が1278のアルマナックを使ってシミュレートした。衛星のマスク角は10度とした。
【0054】
高い建物による遮蔽をシミュレートしてGPS衛星が一部利用できない状態を第一のケースで考慮する。遮蔽はt=50秒の時マスク角45度として表す。図6に観測可能な衛星のスカイプロットを示す。観測された衛星の数は10機であるが、遮蔽の後は3機の衛星しか観測されない。こうした場合には従来のRTK−GPSでは定位置を出力できない。ここで述べる密結合GPS/DR航法システムによれば、衛星の数が4機未満であっても、DD位相とコードにより測定値更新が可能である。
【0055】
シミュレーションでのセンサ誤差を式(31)により求める。
【0056】
ε=0.2度、ev=5%、eg=5%、bg=0.1度/秒 (31)
図7にシミュレーションに用いる車両の速度(velocity)、方向(heading)、ヨーレート(yaw rate)を示す。横軸は時間[秒](time[s])である。図7(a)で実線はオドメトリ(odometry)による測定値、(b)で実線はD/Rによる測定値、(c)で実線はジャイロ(gyro)による測定値、破線はそれぞれ真の値(true)を示す。EKFが推定するセンサ誤差を図8に示す。図8で(a)は方向、(b)は速度、(c)はジャイロ誤差(gyro s/f error)、(d)はジャイロバイアス(gyro bias)を示す。推定誤差は真の値に収束している。EKFによる位置誤差を図9に示す。図9で(a)は東方向(easting)、(b)は北方向(northing)、(c)は上方向(up)への移動による誤差を示している。比較の為に、従来の疎結合(loosely coupled)RTK−GPS/DR航法システムによる位置誤差を同じ図中に示す。密結合(tightly coupled)システムによる位置誤差は疎結合システムよりはるかに小さい。第二のケースでは、衛星完全遮蔽をt=50秒でシミュレートする。この場合は、ランドマーク更新を効果的に用いている。レーザスキャナの最大距離は30m、距離精度は4cm、角分解能は1度であると仮定する。図10に示すように距離が30m未満であれば、コーナーランドマークの前でランドマーク更新を行う。実線で示したランドマーク測定値更新、及び破線で示した真のセンサ誤差と共にEKFが推定するセンサ誤差を図11に示す。推定誤差は真の値に収束している。図12はランドマーク更新を行った場合と行わない場合の位置誤差を示す。図12で(a)は東方向、(b)は北方向への移動による誤差を示し、それぞれ実線はランドマーク更新を行った場合(with landmark update)、破線はランドマーク更新を行わない場合(without landmark update)を示している。GPS測定値が得られない場合でも位置誤差は小さい。
【0057】
野外試験(フィールドテスト)
図13に示す自律陸上用車両を野外試験に使用した。このAGV(Autonomous Ground Vehicle)は一定の地域を自律巡回する監視車両として開発された。レーザスキャナ、距離精度35mmで角分解能1度のSICK LMS291、監視用の全方位ビデオ(Omni−Directional Video:ODV)カメラ、二重周波数GPS受信機、アシュテックZエクストリーム(Ashtech Z−Xtreme)、1度/時の精度のFOG、及び高分解オドメータを備える。この車両のリアルタイム誘導とGPS/DR航法はオンボードのRT(リアルタイム)リナックス(登録商標)コンピュータ上で実行する。ここで分析したデータは2004年7月6日、鎌倉で収集したものである。藤沢でのGEONET[3]の基地局で観測した二周波数GPSデータは差分補正に使用する。測量基線長は約5kmである。観測された衛星は図6に示すものとほぼ同じである。RTK−GPS受信機によるアンビギュイティは時間の40%のみ整数解に基づく位置となり、時間の32%については解を持たない。
【0058】
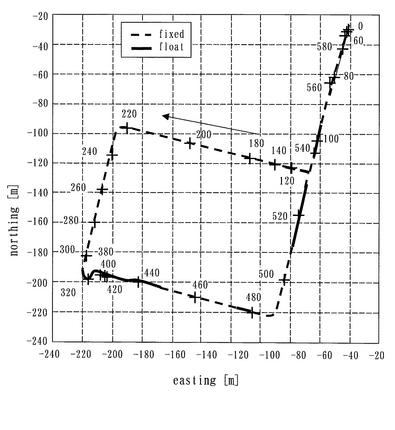
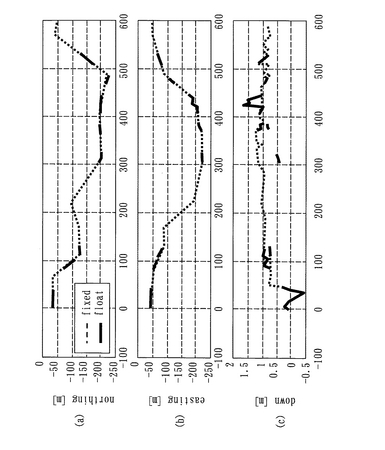
現存のオンボードリアルタイム実装は疎結合航法に基づいている。密結合航法の解は後処理演算により求めた。図14と図15に野外試験での演算位置結果を示す。図14は水平位置、図15で(a)は北方向、(b)は東方向、(c)は下方向(down)の位置を示している。それぞれの図中で黒実線は整数解(fixed)を示し灰色実線は浮動小数点値(float)である。図16で(a)は観測された衛星の数(number of sats)、(b)は整数アンビギュイティの推定有効性(ambiguity validity)を示す。有効性が1であるなら、整数アンビギュイティが求められていると推定できる。密結合航法システムの場合は、位置の70%以上が整数解に基づくものである。EKFによる演算位置とRTK−GPS受信機の整数解を比較してセンチメートルレベルの精度を確認した。RTK−GPSの整数解が得られない場合は、DD搬送波位相の残差解析によって位置精度を確認した。
【0059】
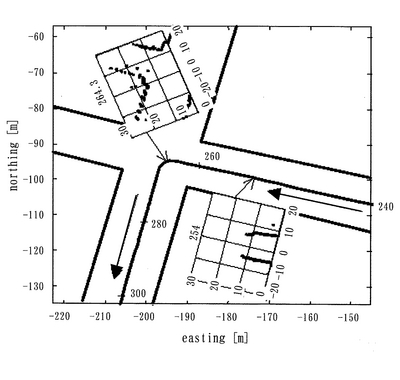
ランドマーク更新は経路の二番目のコーナーで行う。図17は車両の経路とt=254秒とt=264.3秒におけるレーザスキャナ距離のプロットを示す。レーザスキャナ距離のプロットは経路方向に合わせるため車両の方向により回転する。この図はレーザスキャナによる距離測定によってコーナーが検出可能であることを示している。
【0060】
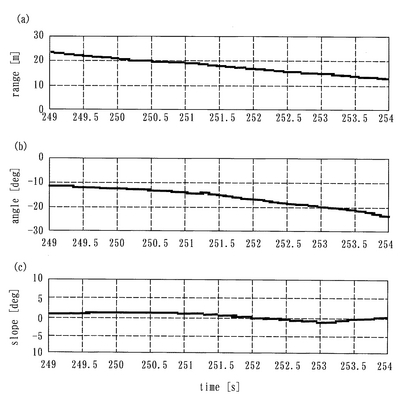
図18に、コーナーランドマークの測定相対距離及び相対角度、ラインランドマークの測定斜度を含むレーザスキャナによる二つ目のコーナーでの測定データの例を示している。図18で(a)は距離(range)、(b)は角度(angle)、(c)は傾斜度(slope)をそれぞれ示す。
【0061】
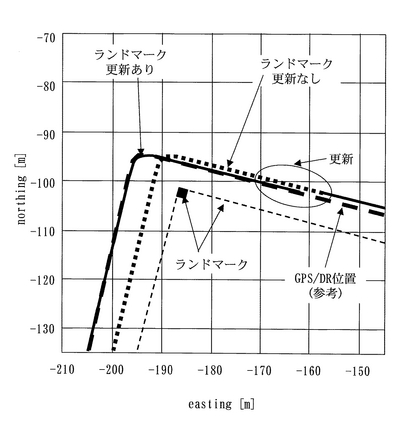
図14に示すGPS/DR位置は既に高精度であるので、GPS測定値更新無しにランドマーク更新を行う。図19にランドマーク更新による演算位置結果を示す。比較の為に、ランドマーク更新無しの結果とGPS/DR位置を同図に示す。演算位置結果はGPS/DR位置とほとんど同じである。GPS測定値が得られない場合でも、コーナーランドマーク及びラインランドマーク更新により位置精度は向上する。
【0062】
搬送波位相ディファレンシャルGPSとAGV用レーザスキャナにより補強された水平航法システムを設計し、その性能を数値シミュレーション及び野外試験によって確認した。本発明の実施の形態によれば、搬送波位相ディファレンシャルGPSとLS補強を利用した密結合航法システムを提案することで衛星視界が劣悪な場合でもデシメートルレベルの測位精度が得られる。
【図面の簡単な説明】
【0063】
【図1】陸上用の車両の動的モデル図である。
【図2】本発明の一つの実施の形態によるGPS/DR航法システムを示す図である。
【図3】ランドマーク更新を示す図である。
【図4】GPSのシミュレーションモデルを示す図である。
【図5】シミュレーションに用いた水平航法経路を示す図である。
【図6】2004年7月6日に行った衛星スカイプロットを示す図である。
【図7】シミュレーション時の車両の速度、方向、ヨーレートを示す図である。
【図8】拡張カルマンフィルタが推定したセンサ誤差を示す図である。
【図9】拡張カルマンフィルタが推定した位置誤差を示す図である。
【図10】ランドマーク更新によるシミュレーションに用いた水平航法経路を示す図である。
【図11】ランドマーク更新の際の拡張カルマンフィルタが推定したセンサ誤差を示す図である。
【図12】ランドマーク更新の際の拡張カルマンフィルタが推定した位置誤差を示す図である。
【図13】自律陸上車両(AGV)を示す図である。
【図14】野外試験時のカルマンフィルタが推定した水平位置を示す図である。
【図15】野外試験時のNED位置を示す図である。
【図16】衛星数及び整数アンビギュイティの推定有効性を示す図である。
【図17】野外試験時の車両経路及びレーザスキャナの測定距離のプロットを示す図である。
【図18】野外試験時のランドマーク更新のための測定データを示す図である。
【図19】野外試験時のランドマーク更新の有無による演算位置更新を示す図である。
【図20】本発明の一つの実施の形態による方法を示す図である。
【符号の説明】
【0064】
201 GPS受信機、202 DD演算部、203 ラムダアンビギュイティ決定部、204 衛星軌道演算部、205 サイクルスリップ検出部、206 ランドマークデータベース、207 レーザスキャナ、208 FOG/オドメータ、209 拡張カルマンフィルタ、210 ストラップダウン航法部。
【特許請求の範囲】
【請求項1】
物体の位置及び方向を判断する航法装置において、
速度検出器の出力とヨーレート検出器の出力とに基づいて前記物体の位置及び方向を演算する航法演算部と、
全地球測位衛星から受信した搬送波位相と擬似距離とに基づいて、前記速度検出器の誤差と、前記ヨーレート検出器の誤差と、前記物体の位置誤差及び方向誤差と、搬送波の整数値バイアスとを推定する推定部とを備え、
前記航法演算部は、前記推定部が推定した位置誤差及び方向誤差に基づいて前記物体の位置及び方向を更新することを特徴とする航法装置。
【請求項2】
前記推定部は、既知のランドマークと前記物体との間の相対距離を前記物体に設置された距離測定器が測定した距離と記憶されている前記既知のランドマークの位置データとに基づいて推定し、推定した相対距離に基づいて前記各誤差を演算することを特徴とする請求項1に記載の航法装置。
【請求項3】
前記推定部は、少なくとも2つの既知のランドマークの幾何データと前記距離測定器の既知のヨー角度とに基づいて前記相対距離を推定することを特徴とする請求項2に記載の航法装置。
【請求項4】
前記航法演算部は、NとEとDとを位置の成分、φを方向、Vを前記速度検出器が測定した速度、rを前記ヨーレート検出器が測定したヨーレート、tを時間、bを所定の距離としたとき、運動方程式、
【数1】
により前記物体の位置及び方向を演算することを特徴とする請求項1に記載の航法装置。
【請求項5】
前記推定部は、
二重差分搬送波位相の浮動小数点アンビギュイティベクトルを推定する拡張カルマンフィルタと、
前記拡張カルマンフィルタが推定した二重差分搬送波位相の浮動小数点アンビギュイティベクトルに基づいて、ラムダ法により、前記搬送波の整数値バイアスのアンビギュイティを決定するアンビギュイティ決定部とを備えることを特徴とする請求項1に記載の航法装置。
【請求項6】
前記航法演算部は、オドメータの出力とレートジャイロの出力とに基づいて前記物体の位置及び方向を演算することを特徴とする請求項1に記載の航法装置。
【請求項7】
請求項1に記載の航法装置を搭載する車両。
【請求項8】
物体の位置及び方向を得る航法測位方法において、
速度検出器の出力とヨーレート検出器の出力とに基づいて前記物体の位置及び方向を演算する演算工程と、
全地球測位衛星から受信した搬送波位相と擬似距離とに基づいて、前記速度検出器の誤差と、前記ヨーレート検出器の誤差と、前記物体の位置誤差及び方向誤差と、搬送波の整数値バイアスとを推定する推定工程と、
推定した位置誤差及び方向誤差に基づいて前記物体の位置及び方向を更新する更新工程とを備えることを特徴とする航法測位方法。
【請求項9】
前記推定工程は、既知のランドマークと前記物体との間の相対距離を前記物体に設置された距離測定器が測定した距離と記憶されている前記既知のランドマークの位置データとに基づいて推定し、推定した相対距離に基づいて観測誤差を演算することを特徴とする請求項8に記載の航法測位方法。
【請求項10】
前記推定工程は、少なくとも2つの既知のランドマークの幾何データと前記距離測定器の既知のヨー角度とに基づいて前記相対距離を推定することを特徴とする請求項9に記載の航法測位方法。
【請求項11】
前記推定工程は、レーザスキャナが測定した距離に基づいて前記相対距離を推定することを特徴とする請求項9に記載の航法測位方法。
【請求項12】
前記演算工程は、NとEとDとを位置の成分、φを方向、Vを前記速度検出器が測定した速度、rを前記ヨーレート検出器が測定したヨーレート、tを時間、bを所定の距離としたとき、運動方程式、
【数2】
により前記物体の位置及び方向を演算することを特徴とする請求項8に記載の航法測位方法。
【請求項13】
前記推定工程は、
拡張カルマンフィルタを用いて二重差分搬送波位相の浮動小数点アンビギュイティベクトルを推定し、
前記拡張カルマンフィルタが推定した二重差分搬送波位相の浮動小数点アンビギュイティベクトルに基づいて、ラムダ法により、前記搬送波の整数値バイアスのアンビギュイティを決定することを特徴とする請求項8に記載の航法測位方法。
【請求項14】
前記演算工程は、オドメータの出力とレートジャイロの出力とに基づいて前記物体の位置及び方向を演算することを特徴とする請求項8に記載の航法測位方法。
【請求項15】
慣性及び衛星航法を用いて自律車両の位置及び方向を判断する航法システムにおいて、
前記自律車両の速度を検出する速度検出器と、
前記自律車両のヨーレートを検出するヨーレート検出器と、
既知のランドマークの位置データを記憶するランドマークデータベースと、
前記自律車両に装着され前記自律車両から既知のランドマークまでの距離を測定する距離測定器と、
速度検出器が検出した速度とヨーレート検出器が検出したヨーレートとに基づいて前記自律車両の位置及び方向を演算する航法演算部と、
全地球測位衛星から受信した搬送波位相と擬似距離とに基づいて、前記速度検出器の誤差と、前記ヨーレート検出器の誤差と、前記自律車両の位置誤差及び方向誤差と、搬送波の整数値バイアスとを推定する推定部とを備え、
前記航法演算部は、前記推定部が推定した位置誤差及び方向誤差に基づいて前記自律車両の位置及び方向を更新することを特徴とする航法システム。
【請求項16】
前記推定部は、既知のランドマークと前記自律車両との間の相対距離を前記自律車両に設置された距離測定器が測定した距離と記憶されている前記既知のランドマークの位置データとに基づいて推定し、推定した相対距離に基づいて観測誤差を演算することを特徴とする請求項15に記載の航法システム。
【請求項17】
前記推定部は、少なくとも2つの既知のランドマークの幾何データと前記距離測定器の既知のヨー角度とに基づいて前記相対距離を推定することを特徴とする請求項15に記載の航法システム。
【請求項18】
前記航法演算部は、NとEとDとを位置の成分、φを方向、Vを前記速度検出器が測定した速度、rを前記ヨーレート検出器が測定したヨーレート、tを時間、bを所定の距離としたとき、運動方程式、
【数3】
により前記自律車両の位置及び方向を演算することを特徴とする請求項15に記載の航法システム。
【請求項19】
前記推定部は、
二重差分搬送波位相の浮動小数点アンビギュイティベクトルを推定する拡張カルマンフィルタと、
前記拡張カルマンフィルタが推定した二重差分搬送波位相の浮動小数点アンビギュイティベクトルに基づいて、ラムダ法により、前記搬送波の整数値バイアスのアンビギュイティを決定するアンビギュイティ決定部とを備えることを特徴とする請求項15に記載の航法システム。
【請求項20】
請求項15に記載の航法システムを装備した車両。
【請求項1】
物体の位置及び方向を判断する航法装置において、
速度検出器の出力とヨーレート検出器の出力とに基づいて前記物体の位置及び方向を演算する航法演算部と、
全地球測位衛星から受信した搬送波位相と擬似距離とに基づいて、前記速度検出器の誤差と、前記ヨーレート検出器の誤差と、前記物体の位置誤差及び方向誤差と、搬送波の整数値バイアスとを推定する推定部とを備え、
前記航法演算部は、前記推定部が推定した位置誤差及び方向誤差に基づいて前記物体の位置及び方向を更新することを特徴とする航法装置。
【請求項2】
前記推定部は、既知のランドマークと前記物体との間の相対距離を前記物体に設置された距離測定器が測定した距離と記憶されている前記既知のランドマークの位置データとに基づいて推定し、推定した相対距離に基づいて前記各誤差を演算することを特徴とする請求項1に記載の航法装置。
【請求項3】
前記推定部は、少なくとも2つの既知のランドマークの幾何データと前記距離測定器の既知のヨー角度とに基づいて前記相対距離を推定することを特徴とする請求項2に記載の航法装置。
【請求項4】
前記航法演算部は、NとEとDとを位置の成分、φを方向、Vを前記速度検出器が測定した速度、rを前記ヨーレート検出器が測定したヨーレート、tを時間、bを所定の距離としたとき、運動方程式、
【数1】
により前記物体の位置及び方向を演算することを特徴とする請求項1に記載の航法装置。
【請求項5】
前記推定部は、
二重差分搬送波位相の浮動小数点アンビギュイティベクトルを推定する拡張カルマンフィルタと、
前記拡張カルマンフィルタが推定した二重差分搬送波位相の浮動小数点アンビギュイティベクトルに基づいて、ラムダ法により、前記搬送波の整数値バイアスのアンビギュイティを決定するアンビギュイティ決定部とを備えることを特徴とする請求項1に記載の航法装置。
【請求項6】
前記航法演算部は、オドメータの出力とレートジャイロの出力とに基づいて前記物体の位置及び方向を演算することを特徴とする請求項1に記載の航法装置。
【請求項7】
請求項1に記載の航法装置を搭載する車両。
【請求項8】
物体の位置及び方向を得る航法測位方法において、
速度検出器の出力とヨーレート検出器の出力とに基づいて前記物体の位置及び方向を演算する演算工程と、
全地球測位衛星から受信した搬送波位相と擬似距離とに基づいて、前記速度検出器の誤差と、前記ヨーレート検出器の誤差と、前記物体の位置誤差及び方向誤差と、搬送波の整数値バイアスとを推定する推定工程と、
推定した位置誤差及び方向誤差に基づいて前記物体の位置及び方向を更新する更新工程とを備えることを特徴とする航法測位方法。
【請求項9】
前記推定工程は、既知のランドマークと前記物体との間の相対距離を前記物体に設置された距離測定器が測定した距離と記憶されている前記既知のランドマークの位置データとに基づいて推定し、推定した相対距離に基づいて観測誤差を演算することを特徴とする請求項8に記載の航法測位方法。
【請求項10】
前記推定工程は、少なくとも2つの既知のランドマークの幾何データと前記距離測定器の既知のヨー角度とに基づいて前記相対距離を推定することを特徴とする請求項9に記載の航法測位方法。
【請求項11】
前記推定工程は、レーザスキャナが測定した距離に基づいて前記相対距離を推定することを特徴とする請求項9に記載の航法測位方法。
【請求項12】
前記演算工程は、NとEとDとを位置の成分、φを方向、Vを前記速度検出器が測定した速度、rを前記ヨーレート検出器が測定したヨーレート、tを時間、bを所定の距離としたとき、運動方程式、
【数2】
により前記物体の位置及び方向を演算することを特徴とする請求項8に記載の航法測位方法。
【請求項13】
前記推定工程は、
拡張カルマンフィルタを用いて二重差分搬送波位相の浮動小数点アンビギュイティベクトルを推定し、
前記拡張カルマンフィルタが推定した二重差分搬送波位相の浮動小数点アンビギュイティベクトルに基づいて、ラムダ法により、前記搬送波の整数値バイアスのアンビギュイティを決定することを特徴とする請求項8に記載の航法測位方法。
【請求項14】
前記演算工程は、オドメータの出力とレートジャイロの出力とに基づいて前記物体の位置及び方向を演算することを特徴とする請求項8に記載の航法測位方法。
【請求項15】
慣性及び衛星航法を用いて自律車両の位置及び方向を判断する航法システムにおいて、
前記自律車両の速度を検出する速度検出器と、
前記自律車両のヨーレートを検出するヨーレート検出器と、
既知のランドマークの位置データを記憶するランドマークデータベースと、
前記自律車両に装着され前記自律車両から既知のランドマークまでの距離を測定する距離測定器と、
速度検出器が検出した速度とヨーレート検出器が検出したヨーレートとに基づいて前記自律車両の位置及び方向を演算する航法演算部と、
全地球測位衛星から受信した搬送波位相と擬似距離とに基づいて、前記速度検出器の誤差と、前記ヨーレート検出器の誤差と、前記自律車両の位置誤差及び方向誤差と、搬送波の整数値バイアスとを推定する推定部とを備え、
前記航法演算部は、前記推定部が推定した位置誤差及び方向誤差に基づいて前記自律車両の位置及び方向を更新することを特徴とする航法システム。
【請求項16】
前記推定部は、既知のランドマークと前記自律車両との間の相対距離を前記自律車両に設置された距離測定器が測定した距離と記憶されている前記既知のランドマークの位置データとに基づいて推定し、推定した相対距離に基づいて観測誤差を演算することを特徴とする請求項15に記載の航法システム。
【請求項17】
前記推定部は、少なくとも2つの既知のランドマークの幾何データと前記距離測定器の既知のヨー角度とに基づいて前記相対距離を推定することを特徴とする請求項15に記載の航法システム。
【請求項18】
前記航法演算部は、NとEとDとを位置の成分、φを方向、Vを前記速度検出器が測定した速度、rを前記ヨーレート検出器が測定したヨーレート、tを時間、bを所定の距離としたとき、運動方程式、
【数3】
により前記自律車両の位置及び方向を演算することを特徴とする請求項15に記載の航法システム。
【請求項19】
前記推定部は、
二重差分搬送波位相の浮動小数点アンビギュイティベクトルを推定する拡張カルマンフィルタと、
前記拡張カルマンフィルタが推定した二重差分搬送波位相の浮動小数点アンビギュイティベクトルに基づいて、ラムダ法により、前記搬送波の整数値バイアスのアンビギュイティを決定するアンビギュイティ決定部とを備えることを特徴とする請求項15に記載の航法システム。
【請求項20】
請求項15に記載の航法システムを装備した車両。
【図1】

【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】

【図10】
【図11】

【図12】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】

【図2】

【図13】

【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図2】
【図13】
【公開番号】特開2006−138834(P2006−138834A)
【公開日】平成18年6月1日(2006.6.1)
【国際特許分類】
【出願番号】特願2005−98068(P2005−98068)
【出願日】平成17年3月30日(2005.3.30)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 2004年11月1日 アドバンスター・コミュニケーションズ発行の「GPSワールド2004年11月号」に発表
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成18年6月1日(2006.6.1)
【国際特許分類】
【出願日】平成17年3月30日(2005.3.30)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 2004年11月1日 アドバンスター・コミュニケーションズ発行の「GPSワールド2004年11月号」に発表
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]