
航法装置
【課題】自船位置の地点または他の地点を含む航行関連情報の画像を合理的に表示し得るようにした航法装置を提供する。
【解決手段】 自船位置の位置値を取り込んで記憶した記憶内容にもとづいて自船の航跡を表示する航跡表示手段と、自船速度が、所定値に達しているときは所定の時間間隔ごとに取り込んで記憶を行い、所定値に満たないときは所定の距離間隔ごとに取り込んで記憶を行う取込記憶手段とを具備している。
【解決手段】 自船位置の位置値を取り込んで記憶した記憶内容にもとづいて自船の航跡を表示する航跡表示手段と、自船速度が、所定値に達しているときは所定の時間間隔ごとに取り込んで記憶を行い、所定値に満たないときは所定の距離間隔ごとに取り込んで記憶を行う取込記憶手段とを具備している。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、船舶の航行位置、航跡、航行目標地点、予定航路に関する情報およびこれらに付随する情報(この発明において、航行関連情報という)の画像を表示する航法装置に関するものである。
【背景技術】
【0002】
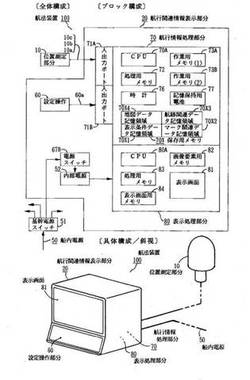
こうした航法装置としては、図13のように、自船の航行位置、すなわち、自船位置を測定する位置測定部分10、例えば、GPS電波航法、ロランC電波航法・デッカ電波航法などにより位置測定を行う位置測定部分と、航行関連情報の画像を表示する航行関連情報表示部分20とを別体にした構成(以下、第1従来技術という)が周知である。
【0003】
なお、以下に説明する各図において、同一符号で示す部分は、いずれかの図において説明する同一符号の部分と同一の機能をもつ部分である。また、地点または位置は、一般に、緯度経度値をもって表した地点または位置とするが、ロラン電波航法・デッカ電波航法を用いる場合には、その航法におけるLOP値で表した地点または位置としてもよい。
【0004】
また、上記の第1従来における位置測定部分10の所定部分、例えば、自船位置10a・自船速度10b・現在進行方向10cのデータを得る演算部分と航行関連情報表示部分20とを一体にした構成(以下、第2従来技術という)とが周知である。
【0005】
そして、上記の電波航法による位置測定部分10は、一般に、電波航法受信機とも呼ばれており、また、上記の航行関連情報表示部分20は、一般に、航跡記録装置とも呼ばれている。
【0006】
さらに、例えば、GPS電波航法による電波航法受信機を位置測定部分10とした場合には、自船位置のほかに、自船速度・現在進行方向をも測定し得るようにした構成(以下、第3従来技術という)が周知である。なお、GPS電波航法による電波航法受信機では、自船速度・現在進行方向をGPS電波の周波数のドップラー偏移量から測定し得るという特長がある。
【0007】
図13において、位置測定部分10、例えば、GPS電波航法受信機は、自船位置10a・自船速度10b・現在進行方向10cのデータを含む信号を航行関連情報の一部として、航行関連情報表示部分20に与える。
【0008】
航行関連情報表示部分20は、マイクロコンピュータを主体とする制御処理機能(以下、CPUという)70Aをもつ航行情報処理部分70、例えば、市販のCPUを主体にして構成した制御処理部分と、CPU70Aと共同動作するCPU80Aをもつ表示処理部分80、例えば、市販の描画処理用ICを主体にして構成した制御処理部分とで構成してある。
【0009】
そして、自船位置10a・自船速度10b・現在進行方向10cのデータは、入出力ポート71A、すなわち、I/O部分を介して、航行情報処理部分70に取り込まれ、自船位置10aのデータは、後記の設定操作部分60を操作して与えられた設定条件にもとづいて、所定の時間ごとに、または、所定の距離間隔ごとに取り込んで、航跡データ用メモリ74に記憶する。
【0010】
設定操作部分60は、例えば、所要の操作入力を、入出力ポート71B、すなわち、I/O部分を介して、航行情報処理部分70に与えるための操作キーなどの操作部分を配置した操作パネルであって、航行情報処理部分70によって所要の航行関連情報を得るための処理条件と、所要の航行関連条件を表示処理部分80の表示画面81に表示するための表示条件とを設定する操作部分であり、例えば、上記の自船位置10aのデータの取込条件のほか、表示尺度、緯度経度線の表示・消去、表示範囲の移動・拡大・縮小、地図の表示・消去などを設定または変更するための各操作キーを設けてある。
【0011】
航行情報処理部部分70は、入出力ポート71Bから取り込んだ設定信号60aによる設定データ、制御処理の過程上に必要なデータなどの記憶を行う作業用メモリ73と、上記の航跡データ用メモリ74と、地図を表示するためのデータを記憶する地図データメモリ75と、時間的なデータを得るための時計回路76と、マークやメニューなど固定的な図形や画面要素の指定データを記憶した処理用メモリ72とから所要の各データを取り込んで、処理用メモリ72に記憶した制御処理フローのプログラムにより所要の処理を行って得られる航行関連情報のデータを作業用メモリ73に記憶する。
【0012】
作業用メモリ73に記憶した航行関連情報のデータは、必要に応じて、航跡データ用メモリ74に記憶されている航行関連情報のデータ、地図データ用メモリ75に記憶されている航行関連情報のデータとともに、表示処理部分80に与えられる。なお、地図は、一般に、海岸線のみの図形を表示する場合と、海岸線の陸地側の部分を所定の色で塗りつぶした図形を表示する場合とのいずれか1つが用いられる。
【0013】
表示処理部分80では、CPU80Aが、情報処理部分70から与えられた各航行関連情報のデータを、画像要素メモリ82に記憶された描画用の画像要素のデータと、処理用メモリ83に記憶した制御処理用の処理フローのプログラムとにもとづいて処理することより、目的とする航行関連情報の画像、例えば、図14のように、
【0014】
自船航跡CR1、計画航路RT1、目的地点JP1、地図M1、緯度線LX・経度線LYなどの図形と、自船位置10a・自船速度10b・現在進行方向10c・目的地点JP1の数値、進行方向10cと計画航路RT1との差角θ1の数値などの文字TTとを表す画像のデータを、逐次、更新させながら表示画面用メモリ84に記憶するとともに、表示画面用メモリ84の記憶内容を読み出して表示画面81に表示する。
【0015】
そして、処理用メモリ72・処理用メモリ83・地図データ用メモリ75・画像要素メモリ82をROM、すなわち、読出専用メモリで構成し、また、作業用メモリ73・航跡データ用メモリ74・表示画面用メモリ84をRAM、すなわち、書換読出可能なメモリで構成するとともに、装置の動作電源(図示せず)を遮断した後も、航跡データ用メモリ74の記憶内容を記憶保持用電池77、例えば、長期間にわたって使用可能なリチウム電池、または、ニッケルカドミウム電池などの充電可能な電池によって記憶保持することにより、再度、装置の動作電源を投入したときに、過去の航行関連情報の表示を再現できるように構成してある。
【0016】
図14において、表示画面81は、ラスタ走査による表示面をもつ表示器、例えば、ブラウン管表示器、ドットマトリクス型液晶表示器などの表示画面であり、表示する画像の各図形は次のように生成して表示している。
【0017】
自船航跡CR1の画像は、航跡データ用メモリ74に記憶されている過去の自船位置10aのデータと現在の自船位置10aのデータとの各地点を画像要素メモリ82に記憶された描画用の画像要素により接続して、1つの航跡線の図形にして表示する。なお、過去の航海時における自船航跡CR2を、線の種類を異ならせるか、後記のように、色を異ならせるかして表示することもできる。
【0018】
計画航路RT1の画像は、目的地点JP1までの航路を、複数の方向変更点P1〜P4の地点を画像要素メモリ82に記憶された描画用の画像要素により接続して、一連の折れ線状の航路線L1〜L5の図形にして表示する。
【0019】
また、方向変更点P1〜P4の地点を設定せずに、目的地点JP1のみを設定し、その設定を行った時点での自船位置10aと目的地点JP1とを結ぶ1つの直線のみの図形を表示するように構成することもできる。なお、方向変更点P1〜P4は変針点とも言われている。
【0020】
地図M1の画像は、地図データ用メモリ75に記憶されている細かい間隔の地点を画像要素メモリ82に記憶された描画用の画像要素により接続して、例えば、一連の海岸線の図形にして表示する。なお、地図M1は、船舶用の場合には、海図になるので、所定の海底深度、例えば、100mごとの等深度点を結んだ等深線Ldの図形の画像も表示するようにしている。
【0021】
緯度線LX・経度線LYの画像は、予め定めた条件、または、後記のメニュー画面によって設定した条件による本数と間隔、例えば、緯度線LXを2本、経度線LYを3本、間隔を緯度経度の「′」または「″」の整数値とする条件に従って演算した地点の箇所を画像要素メモリ82に記憶された描画用の画像要素により画面全体にわたる横線と縦線、例えば、実線による横線と縦線とにした図形を表示する。
【0022】
表示画面81上の任意の点CPを指定するための移動可能なカーソルCLX・CLYは、設定操作部分60からの操作入力によって表示画面81上を移動する指定点CPの箇所を描画用の画像要素により画面全体にわたる横線と縦線、例えば、点線による横線と縦線とにした図形を表示する。
【0023】
設定操作部分60は、具体的には、各操作キーを、例えば、操作している間のみ接点が閉じられる接点操作キーで構成してあり、操作した操作キーによる入力を入出力ポート71Bで所定の符号の信号に変換して所定の部分に与えるように構成したものである。
【0024】
そして、各航行関連情報を色分けして表示するようにしたカラー表示の場合には、例えば、図15のように、画面選択操作部分61・目的地等設定操作部分62・航跡設定操作部分63・マーク設定操作部分64・数値等設定操作部分65・画面設定操作部分66・電源等操作部分67・任意方向移動操作部分68などで構成してある。
【0025】
図15において、画面選択操作部分61は、主として、表示画面81に表示する航行関連情報の表示画像の表示形態を選択する操作部分であり、「航跡」キー・「操船」キー・「モニタ」キー・「メニュー」キーなどが設けてある。
【0026】
「航跡」キーは、自船の航跡を主体とする表示状態、例えば、図14の表示状態に選択する操作キーである。「操船」キーは、自船の操船を主体とする表示状態に選択する操作キーである。「モニタ」キーは、航行関連情報を文字のみで表示して監視する状態、すなわち、モニタ状態に選択する操作キーである。「メニュー」キーは、航行関連情報の表示条件のうちの各細部の設定を行うメニュー画面を表示する表示状態に選択する操作キーである。
【0027】
目的地等設定操作部分62は、主として、表示画面81に表示する航行関連情報のうちの目的地などに関連する表示形態を選択する操作部分であり、「目的地」キー・「行先」キー・「ルート」キー・「警報」キーなどが設けてある。
【0028】
「目的地」キーは、航行の終点とする目的地点、例えば、図14の目的地点JP1を設定するとともに設定した目的地に所定の符号、例えば、目的地番号を付して記憶する登録を行う表示状態にする操作キーである。
【0029】
「行先」キーは、「目的地」キーによる操作で登録した目的地のいずれか1つを行先として選択する表示状態にする操作キーである。「ルート」キーは、目的地点までの計画航路、例えば、図14の計画航路RT1、すなわち、ルートの設定を行う表示状態にする操作キーである。
【0030】
「警報」キーは、所定の地点、例えば、図14の目的地点JP1から所定距離の地点に到達したことなどの警報を発生する警報条件の設定を行う表示状態にする操作キーである。
【0031】
航跡設定操作部分63は、主として、表示画面81に表示する航行関連情報のうちの航跡などに関連する表示形態を選択する操作部分であり、「地図」キー・「色」キー・「消去」キー・「接/断」キーなどが設けてある。
【0032】
「地図」キーは、航跡表示の表示状態において、地図の表示・不表示を選択する操作キーである。「色」キーは、航跡の図形、例えば、図14の自船航跡CR1・過去航跡CR2に対する各表示色を選択する操作キーである。
【0033】
なお、表示色の選択は、「色」キーを操作して「色」選択メニューの画面を表示し、「色」選択メニューに表示された各色に対応する数字を、後記の「0」〜「9」の各数字キーで選択するように構成してある。
【0034】
「消去」キーは、航路の画像、例えば、図14の自船航跡CR1・過去航跡CR2の画像を一時的に消去する操作キーである。「接/断」キーは、航跡を画くために、自船位置10aのデータを航跡データ用メモリ74に取り込む間隔の間隔値の選択と、その取り込みをON状態、すなわち、「接」状態と、OFF状態、すなわち、「断」状態とに切り換える操作キーである。
【0035】
なお、「接/断」キーによる「接」状態において、自船位置10aのデータを航跡データ用メモリ74に取り込む間隔の間隔値は、上記の「メニュー」キーによるメニュー画面によって、所定の時間間隔、例えば、「20秒」ごとに取り込むように設定したり、所定の距離間隔、例えば、移動「100m」ごとに取り込むように設定したりすることができる。
【0036】
ここで、航跡表示の表示状態とは、航跡表示を行うことができる表示状態を言うものであって、上記のように、航跡の画像を消去している表示状態を含むものである。
【0037】
マーク設定操作部分64は、主として、航跡表示の表示状態において、航行関連情報に付随する各所定の地点、例えば、図14の自船位置10a、目的地点JP1、留意すべき事項、例えば、漁撈などを行った留意地点EV1・EV2などを表示するマークの図形と色とを選択する操作部分であり、「色」キー・「○」キー・「△」キー・「□」キーなどが設けてある。
【0038】
「色」キーは、各マーク図形をさらに複数に区別するための各表示色を選択すする操作を行う操作キーであって、各表示色の選択は、航跡設定操作部分63における「色」選択と同様の操作によって選択する。「○」キー・「△」キー・「□」キーは、このうちのいずれかのキーを操作することよって、操作したキーの図形をマークとして選択する。
【0039】
なお、これらのマークは、表示する画像の「拡大」「縮小」には無関係に常に一定の大きさで表示するようにしている。また、上記の留意すべき事項、例えば、漁撈などを行った地点EV1・EV2などを表示するマークをイベントマークと言っている。
【0040】
数値等設定操作部分65は、主として、メニュー画面の表示状態において、所要の数値を入力し、または、所要の項目、例えば、「色」の種類などを選択する操作を行う操作部分であり、「0」〜「9」の各数字キー・「+」「−」の各符号キーなどが設けてある。
【0041】
画面設定操作部分66は、主として、航跡表示の表示状態において、画面の尺度の変更、画面の移動などの操作を行う操作部分であり、「中央」キー・「↑」キー・「↓」キー・「→」キー・「←」キー・「拡大」キー・「縮小」キーなどが設けてある。
【0042】
「中央」キーは、自船位置10aを表示画面81の画面の中央に位置付けた表示状態にする操作キーである。「拡大」キー、すなわち、4つの斜め外側に向いている矢印を付した操作キーは、表示している画面をズーム状に拡大する操作キーである。「縮小」キー、すなわち、4つの斜め内側に向いている矢印を付した操作キーは、表示している画面をズーム状に縮小する操作キーである。
【0043】
「↑」キー・「↓」キー・「→」キー・「←」キーは、後記の「カーソル」キーによってカーソルを表示させているときは、カーソルCLX・CLYの交点、すなわち、指定点CPを矢印方向に相当する上方向・下方向・左方向・右方向のいずれかに移動する操作キーとして動作し、カーソルを表示していないときは、画面全体を矢印方向に相当する上方向・下方向・左方向・右方向のいずれかに移動する操作キーとして動作する。
【0044】
電源等操作部分67は、主として、装置の電源のON−OFFと、表示画面81の輝度の調整とを行う操作部分であり、「電源」キー・「輝度」キーなどが設けてある。
【0045】
「電源」キー67Aは、装置の電源をON−OFF、すなわち、投入または遮断する操作を行う操作キーである。「輝度」キーは、表示画面の輝度を変更する操作を行う操作キーである。そして、電源の投入・遮断を行う部分は、図13のように、船内電源50から、自己保持回路55を介して、装置各部に所要の電圧を与えるための内部電源部分52に供給するようにしてある。
【0046】
自己保持回路55は、図15の電源キー67Aを操作する度ごとに、投入側と遮断側とに交互に切り替えて保持するとともに、船内電源50自体が遮断されたときは、自動的に遮断側にリセットされるように構成した回路、例えば、J−Kフリップフロップ回路と継電器との組合回路である。したがって、記憶保持用電池77として、充電可能な電池を用いている場合には、電源が投入されている間だけ充電状態になっている。
【0047】
任意方向移動操作部分68は、表示している画面全体またはカーソルCLX・CLYを任意の方向に移動する操作を行う操作部分であって、例えば、トラックボール、ジョイスティックなどで構成してある。
【0048】
そして、後記の「カーソル」キーによってカーソルを表示させているときは、カーソルCLX・CLYの交点、すなわち、指定点CPを任意の方向に移動する操作キーとして動作し、カーソルを表示していないときは、画面全体を任意の方向に移動する操作キーとして動作する。
【0049】
カーソル等設定操作部分69は、主として、カーソルの表示・不表示と、表示画面の向きと、選択または入力した条件・数値の決定または取消などの操作を行う操作部分であり、「カーソル」キー・「航法切換」キー・「決定」キー・「取消」キーなどが設けてある。
【0050】
「カーソル」キーは、キー操作する度ごとに、カーソルCLX・CLYを表示状態と、不表示状態とに切り換える操作キーである。「航法切換」キーは、キー操作する度ごとに、表示画面81の真上方向を「北方向」として表示画像を表示する「北方向表示」と、表示画面81の真上方向を「船首方向」として表示画像を表示する「船首方向表示」と、表示画面81の真上方向を「目的地点JP1の方向」として表示画像を表示する「目的地点方向表示」とに切り換える操作キーである。
【0051】
「決定」キーは、他の操作キーを操作して選択または入力した条件・数値により動作させることを「決定」する操作キーである。「取消」キーは、上記の条件・数値を取り消す操作キーである。
【0052】
上記の図13〜図15の構成において、必要に応じて、外部記憶部分90とその入出力ポート91とを設けて所要のデータを外部から装置内部に取り込んで記憶し、または、装置内部のデータを外部記憶部分90、例えば、ICカードに記憶させて保存する構成(以下、第4従来という)が周知である。
【0053】
そして、前者の構成の場合には、例えば、地図データ用メモリ75を除去して、外部記憶部分90を予め地図データを記憶したICカードにして構成するとともに、入出力ポート91にICカードの記憶読取機能を設けて構成することにより、地図データを外部記憶部分90から読み取って表示するように構成している。
【0054】
また、後者の構成の場合には、例えば、外部記憶部分90を航跡表示状態における表示画面81の表示データを記憶するICカードにして構成するとともに、入出力ポート91にICカードの記憶書込・読出機能を設けて構成することにより、過去の航跡表示状態における航行関連情報を保存するとともに、必要に応じて、過去の航跡表示状態を再現表示するように構成している。
【0055】
上記の図14の構成では、計画航路RT1に対する自船の操船状態を進路ずれθ1で表示しているが、こうした進路ずれの表示に代えて、図16のように、計画航路RT1を中心にした所定の距離幅B1、例えば、左右各100mの幅の部分を所定の航路範囲としておき、自船位置10aが距離幅B1を越えた距離幅B1aを進路ずれ量として表示する構成(以下、第5従来技術という)が周知である。
【0056】
〔画面移行復帰表示動作〕
上記のような航法装置100において、表示画面81に自船位置10aの地点を含む表示状態から、尺度を拡大または縮小して、他の地点、例えば、目的地点JP1を含む表示状態に移行した後に、再び、自船位置10aを含む表示状態に移行させる動作(以下、画面移行復帰表示動作という)は、次のように動作させる構成(以下、第6従来技術という)になっている。
【0057】
まず、図14の表示状態において、カーソルが表示されていないときは、「カーソル」キーを操作してカーソルCLX・CLYを表示状態にし、「↑」キー・「↓」キー・「→」キー・「←」キーのうちの所要の操作キー、または、任意方向移動操作部分68を操作して、カーソルCLX・CLYの交点、すなわち、指定点CPを目的地点JP1に一致させた後に、「中央」キーを操作すると、表示の尺度が図14の尺度、例えば、縮尺1/10000のままで、目的地点JP1が表示画面81の中央位置に位置付けられた表示状態に移行する。
【0058】
次いで、「拡大」キーまたは「縮小」キーのうちの所要の操作キー、この場合は、「拡大」キーを操作して、所要の尺度、例えば、縮尺1/4000に拡大することにより、目的とする表示状態、例えば、図17の表示状態にする。
【0059】
図17の状態では、目的地点JP1の付近を拡大した拡大表示状態になるので、目的地点JP1付近の領域における航行関連情報を綿密に判断することができる。また、上記の尺度の変更の際に、「縮小」キーを操作して、縮小表示状態にした場合には、目的地点JP1を中心とする広い領域における航行関連情報を大略的に判断して航行計画に役立てることができる。
【0060】
しかし、上記の拡大表示状態では、殆どの場合、自船位置10aの地点が含まれないか、または、自船位置10aの地点が表示画面81の隅部分の近くに位置付けられてしまうため、自船の付近の航行関連情報を知ることができないので、図17での表示状態による目的作業が済んだ後は、再び、図14のように、自船位置10aの地点を含む表示状態に戻す必要がある。
【0061】
そこで、まず、「中央」キーを操作すると、図18のように、尺度が縮尺1/4000のままで、自船位置10aが表示画面81の中央位置に位置付けられた状態になるので、次いで、「縮小」キーを操作して、元の尺度、例えば、縮尺1/10000による表示状態に戻している。
【0062】
また、上記の縮小表示状態では、自船位置10aの付近が小さくなり過ぎて、航行状態を明確に判断し得ないので、「中央」キーを操作して、自船位置10aを表示画面81の中央位置に位置付けた後に、「拡大」キーを操作して元の尺度による表示状態に戻している。
【0063】
なお、カーソルCLX・CLYの指定点CPを表示画面81の外側に移動させるように操作することによって、表示画面81に表示されていない外側の地点を指定して画面移行復帰表示動作を行わせることができる。また、表示の尺度は、縮尺に代えて、表示画面81横方向または縦方向の幅に対応する距離値、例えば、「浬」で表した距離値を用いることができる。
【発明の開示】
【発明が解決しようとする課題】
【0064】
〔第1の課題〕
上記の第6従来技術による画面移行復帰表示動作の構成では、「中央」キーを操作した後に、「縮小」キー、または、「拡大」キーを操作して、元の尺度に戻しているので、操作が複雑な上に、時間がかかるという不都合がある。
【0065】
〔第2の課題〕
上記の第1従来技術〜第6従来技術における○マーク・△マーク・□マークなどのマーク表示の構成では、マークを大きくして見易くすると、そのマークによって指示する地点の位置が漠然としたものになってしまうので、マークをなるべく小さくして指示する地点の位置を明確に判別できるようにしているため、目的とするマークの箇所が見ずらく、うっかりすると、マークの箇所を見逃してしまうという不都合がある。
【0066】
〔第3の課題〕
上記の第1従来技術〜第6従来技術における記憶部分の構成では、作業用メモリ73のうちの所要の記憶部分、航跡データ用メモリ74の記憶部分などを記憶保持用電池77で記憶保持しているが、船舶の停泊が長期にわたるときなどには、その間、船内電源50が遮断された状態になり、記憶保持用電池77の蓄電量が低下して、記憶内容が消失するという不都合がある。
【0067】
こうした不都合を解決するために、これらの記憶部分を、電気的に書換可能で電気不要で記憶保持する記憶部分、例えば、フラッシュメモリに変更して構成することが考えられるが、こうした構成では、記憶内容の書換に時間を要するので、航行関連情報の処理動作が遅れてしまい、目的とする表示を行い得なくなるという不都合が生ずる。
【0068】
また、UPS(Uninterruptible Power Supply=無停電電源)を設けたのでは、装置構成が大きくなり、簡便安価な構成にして提供し得ないという不都合が生ずる。
【0069】
〔第4の課題〕
上記の第1従来技術〜第6従来技術におけるカーソルCLX・CLYの構成では、表示画面81の全体にわたる横方向線のカーソルCLXと縦方向線のカーソルCLYとしてあるため、指定すべき地点に指定点CPに一致させる際には、いずれか一方のカーソル線を一致させた後に他方のカーソル線を一致させることで、容易に一致させ得るという利点がある。
【0070】
しかし、カーソルCLX・CLYが表示画面の全体にわたる線になっているので、各航行関連情報の画像の監視には邪魔になるため、用済み後は、その都度、消去しなければならないという不都合がある。
【0071】
さらには、1つの地点を指定した直後に、別の地点を指定する必要が生じた場合には、一旦、消去したカーソルCLX・CLYを、再度、表示する操作を行わなければならないという不都合がある。
【0072】
こうした不都合を解決するために、カーソルCLX・CLYを小さい十文字状の図形によるカーソルに変更した構成のものが周知である。しかし、こうしたカーソルでは、横方向線のカーソルCLXと縦方向線のカーソルCLYのように、いずれか一方のカーソル線を一致させた後に他方のカーソル線を一致させるという操作が行い得ないので、希望する地点にカーソルを一致させるのに、それなりの時間を要するという不都合が生ずる。
【0073】
〔第5の課題〕
上記の第1従来技術〜第6従来技術における記憶部分の構成では、自船位置10aのデータを航跡データ用メモリ74に取り込む間隔を、所定の時間間隔と所定の距離間隔とのうちのいずれかに選択して使用できるようにしてある。
【0074】
しかし、時間間隔を選択して使用しているときには、自船位置10aが殆ど変化していないのに、多くの自船位置10aのデータを航跡データ用メモリ74に取り込んでしまい、航跡データ用メモリ74の記憶内容に無駄が生ずる。
【0075】
また、距離間隔を選択して使用しているときには、ほぼ直線方向に航行しているのに、多くの中間地点における自船位置10aのデータを航跡データ用メモリ74に取り込んでしまい、航跡データ用メモリ74の記憶内容に無駄が生ずるという不都合がある。
このためこうした不都合のない航法装置の提供が望まれているという課題がある。
【課題を解決するための手段】
【0076】
この発明は、上記の〔第1の課題〕に対しては、上記のような
自船位置の地点を含む航行関連情報の画像を所定の尺度で表示する第1の表示状態から、上記の自船位置から離れた他の地点を含む航行関連情報の画像を上記の尺度を他の尺度に変更して表示する第2の表示状態に変更して表示し得るようにした航法装置において、
【0077】
上記の他の地点と上記の変更する尺度とを指定する操作を行うことにより、上記の第1の表示状態の画像における所定の位置の地点と上記の所定の尺度とを記憶するとともに、上記の第1の表示状態から上記の第2の表示状態に移行する第1の表示移行手段と、
【0078】
単一の操作により上記の記憶を読み出して上記の第2の表示状態から上記の第1の表示状態に移行する第2の表示移行手段とを設ける第1の構成と、
【0079】
この第1の構成において、
上記の所定の位置の地点を、上記の第1の表示状態の画像の中央位置の地点、上記の第1の表示状態の画像の四隅点のうちの任意の地点、上記の自船位置の地点のうちのいずれか1つまたは複数とした第2の構成と、
【0080】
上記の第1の構成または第2の構成において、
各上記の尺度を上記の表示を行う表示画面の横方向または縦方向の幅に対応する距離値もしくは縮尺率とした第3の構成とにより解決したものである。
【0081】
上記の〔第2の課題〕に対しては、
自船位置の地点を含む航行関連情報の画像を所定の尺度で表示する表示、または、上記の自船位置から離れた他の地点を含む航行関連情報の画像を上記の尺度を他の尺度に変更して表示する表示を行い得るようにした航法装置において、
【0082】
各上記の航行関連情報に付随する各所定の地点を大略的に識別するための上記の各所定の地点を囲む図形を表示するとともに、上記の図形の中の上記の各所定の地点の真の位置を指示するための図形を表示する地点識別図形表示手段を設ける第4の構成と、
【0083】
この第4の構成において、
上記の地点を囲む図形を円形または多角形による第1の図形とし、上記の真の位置を指示するための図形を上記の第1の図形よりも小さい点状または十文字状の第2の図形とした第5の構成とにより解決したものである。
【0084】
上記の〔第3の課題〕に対しては、
上記の第4の構成における航法装置と同様の航法装置において、
各上記の関連情報のうちの所定の情報を記憶するための記憶部分として、上記の記憶を電気的に書換可能で電気的に記憶保持する揮発性記憶部分と、上記の記憶を電気的に書換可能で電気不要で記憶保持する不揮発性記憶部分とを設ける記憶部併設手段と、
【0085】
装置の動作電源が投入されたときのみ、上記の不揮発性記憶部分と上記の揮発性記憶部分との対応する記憶内容を同一にするための処理を行う記憶同一化処理手段とを設ける第6の構成と、
【0086】
この第6の構成において、
上記の揮発性記憶部分をスタテイックRAMと記憶保持用電池とで構成し、上記の不揮発性記憶部分をフラッシュメモリで構成した第7の構成とにより解決したものである。
【0087】
上記の〔第4の課題〕に対しては、
上記の第4の構成における航法装置と同様の航法装置において、
各上記の表示状態の表示を行う画面における任意の点を指定するために、上記の画面の中を移動可能で上記の任意の点を通るカーソルを表示するカーソル表示手段と、
【0088】
上記のカーソルの移動中は上記のカーソルを上記の画面の横方向全体にわたる横線と上記の画面の縦方向全体にわたる縦線とによる大形のカーソルにより表示し、上記のカーソルの停止中は上記のカーソルを上記の任意の点の部分のみ指示する小形のカーソルにより表示する大小カーソル表示手段とを設ける第8の構成と、
【0089】
この第8の構成において、
上記の大形のカーソルの上記の横線と上記の縦線とを点線または実線で表示し、上記の小形のカーソルを縦横1cm程度の十文字状の図形で表示した第9の構成とにより解決したものである。
【0090】
上記の〔第5の課題〕に対しては、
上記の第4の構成における航法装置と同様の航法装置において、
上記の自船位置の位置値を取り込んで記憶した記憶内容にもとづいて自船の航跡を表示する航跡表示手段と、
【0091】
自船速度が、所定値に達しているときは所定の時間間隔ごとに取り込んで上記の記憶を行い、上記の所定値に満たないときは所定の距離間隔ごとに取り込んで上記の記憶を行う取込記憶手段とを設ける第10の構成と、
【0092】
この第10の構成において、
上記の自船速度として、上記の自船位置を測定する位置測定部分により得られる自船速度を用いる第11の構成と
上記の所定値の判別をヒステリヒス動作により行う第12の構成とにより解決したものである。
【発明の効果】
【0093】
この発明によれば以上のように、第1には、移動前の画像における所定位置と尺度を記憶することによって単一の操作のみで元の表示状態に戻すことができ、第2には、マークを付す地点を囲む図形の中にその地点の真の位置を指示する図形を表示することによってマークを大きく判別し易いものにすることができる。
【0094】
また、第3には、航行関連情報のうちの所定の情報を電気的に書換可能で電気的に記憶保持する記憶部分と電気的に書換可能で電気不要で記憶保持する記憶部分とに記憶するとともに装置の電源を投入したときのみ双方の記憶内容を同一化する書換動作を行うことによって無停電電源などの大形の構成を設けることなく記憶内容を保全できる。
【0095】
さらに、第4には、移動中は大形のカーソルを表示し、停止中は小形のカーソルを表示することによって画像を見易いものにすることができ、第5には、航跡を表示するための位置の取込記憶を自船速度が所定値以上のときは時間間隔で行い、所定値未満のときは距離間隔で行う自動間隔にすることによって無駄な位置の取込記憶を無くすることができるなどの特長をもつ航法装置を提供し得るという効果がある。
【発明を実施するための最良の形態】
【0096】
この発明の実施の形態として、上記の第1従来技術〜第6従来技術の構成にこの発明を適用した実施を説明する。
【実施例】
【0097】
〔第1実施例〕
以下、図1〜図5により第1実施例を説明する。この第1実施例の構成が上記の第1従来技術〜第6従来技術の構成と異なる箇所は次の箇所である。
【0098】
第1には、図1の〔ブロック構成〕と図2とにおいて、電源スイッチ67Bの箇所を、図13の〔ブロック構成〕と図15の「電源」キー・入出力ポート71B・自己保持回路51のような保持構成を介さないで、独立した単なる投入・遮断型のスイッチ、すなわち、ON−OFFスイッチに変更して構成した箇所である。
【0099】
そして、一般に、船内電源50には、航法装置100を含む複数の装置に電源供給するための基幹電源スイッチ51が設けてあるため、これら複数の装置の個々の電源スイッチを操作するのは、手数がかかり、面倒なので、個々の装置における電源スイッチ、例えば、電源スイッチ67Bなどは投入状態のままにしておき、基幹電源スイッチ51を遮断することによって、複数の装置の電源供給を同時に遮断するように構成している。
【0100】
第2には、図2の設定操作部分60において、図15の設定操作部分60を次のように変更して構成した箇所である。つまり、図15の画面選択操作部分61における「メニュー」キーのみを図2の目的地等設定操作部分62Xに配置し、他のキーによる操作は「メニュー」キー62Aによるメニュー画面で選択操作するように変更してある。
【0101】
図15の目的地等設定操作部分62における「目的地」キーによる操作のみを図2の目的地等設定操作部分62Xに配置し、他のキーによる操作は「メニュー」キー62Aによるメニュー画面で選択操作するように変更し、図15の数値等設定操作部分65における操作は全て「メニュー」キー62Aによるメニュー画面で選択操作するように変更してある。
【0102】
図15の画面設定操作部分66を、図2の画面設定操作部分66Xのように、図15の「↑」キー・「↓」キー・「→」キー・「←」による移動操作を除去して、図15と同様の「拡大」キー66D・「中央」キー66E・「縮小」キー66Fに加えて、新たに、「縮尺1」キー66A・「縮尺2」キー66B・「縮尺3」キー66Cを設けるように変更してある。
【0103】
なお、「縮尺1」キー66A・「縮尺2」キー66B・「縮尺3」キー66Cによる尺度は、予め、「メニュー」キー62Aによるメニュー画面で設定できるように構成してある。
【0104】
図15の航跡設定操作部分63を、図2の航跡設定操作部分63Xのように、図15の「地図」キーによる操作を「メニュー」キー62Aによるメニュー画面で選択操作するように変更するとともに、「色」キーとメニュー画面による選択を図2の「航跡色」切換スイッチ63Aで直接的に選択できるように変更してある。
【0105】
さらに、図15と同様の航跡の「接/断」キー63D・「航跡消去」キー63Fに加えて、図2の「記憶」キー63B・「呼出」キー63Cにより、その回における航跡に符号を付して記憶する操作と、記憶した航跡を呼出す操作とを、直接的に、メニューを表示して簡便な操作で行えるように変更してある。
【0106】
図15のマーク設定操作部分64を、図2のマーク設定操作部分64Xのように、図15のと同様の「○」キー64B・「□」キー64Cに加えて「×」キー64Eを配置し、また、図15の「△」キーを逆の三角形図形にした「▽」キー64Fを配置するとともに、「色」キーとメニュー画面による選択を図2の「マーク」切換スイッチ64Aで直接的に選択できるように変更し、さらには、「マーク消去」64Fを配置して、指定したマークを消去できるように変更してある。
【0107】
なお、「×」キー64Eは図形の交差点の位置がマークを設定した位置として明確に表示できる利点があり、また、「▽」キー66Fは、図形の上の辺が長くなっているため、視覚的に「△」よりも強い印象を与えるので、見分け易いという利点がある。
【0108】
また、図2の目的地等設定操作部分62Xには、上記の「メニュー」キー62A・「目的地」キー62B・「カーソル」キー62Hと、図15と同様の「取消」キー62D・「決定」キー62F・「航法切換」キー62Gに加えて、「走錨」キー62C・「復帰」キー62J・「解除」キー62Eを追加してある。
【0109】
「走錨」キー62Cは、自船が錨を下ろした地点の自船位置10aを記憶しておき、自船が、波浪・潮流などにより、その地点から移動した距離・方向などを表示するのに用い、「復帰」キー62Jは、表示画面81に表示している画面を移動操作した後に、元の位置での表示状態に復帰させるのに用い、「解除」キー62Eは、メニュー画面・目的地・走錨の表示・設定などを解除するのに用いる。
【0110】
なお、図2の任意方向移動操作部分68は、ジョイスティク型の操作器で構成してあり、画面やカーソルの移動操作やメニュー画面における選択操作は、全て任意方向移動操作部分68によって行うように変更してある。
【0111】
第3には、図1の〔ブロック構成〕と図3とにおいて、各記憶部分の構成を次のように変更して構成した箇所である。つまり、図13の〔ブロック構成〕における作業用メモリ73を、2つの作業用メモリ(1)73A・作業用メモリ(2)73Bにしてある。
【0112】
そして、作業用メモリ(1)73Aは、記憶保持用電池77では記憶保持できないメモリ、例えば、ダイナミックRAMで構成し、作業用メモリ(2)73Bは、作業用メモリ73と同様に、記憶保持用電池77で記憶保持できるメモリ、すなわち、電気的に書換可能で電気的に記憶保持する揮発性記憶部分、例えば、スタティクRAMで構成してある。
【0113】
作業用メモリ(1)73Aに記憶する記憶内容は、図3のように、現在位置データ・現在速度データ・現在進行方向データ、すなわち、現在の自船位置10a自船速度10b・現在進行方向10cのデータと、その他の演算処理関連データ、すなわち、処理用メモリ72に記憶した制御処理フローのプログラムによる演算処理などの過程において一時的に記憶しておくデータなどの一時的な記憶を要するデータである。
【0114】
作業用メモリ(2)73Bは、図3のように、種々の表示条件に関連するデータを記憶しておく表示条件データ記憶領域73B1と、マークの表示のみに関連するデータを記憶しておくマーク関連データ記憶領域73B2と、航跡の表示のみに関連するデータを記憶しておく航跡関連データ記憶領域73B3とに区分してある。
【0115】
表示条件データ記憶領域73B1には、例えば、「輝度」キー67Cによって設定した輝度データと、「縮尺1」キー66A・「縮尺2」キー66B・「縮尺3」66C・「拡大」キー66D・「縮小」キー66Eのいずれかよって設定した尺度のデータと、
【0116】
「メニュー」キー62Aによって設定した「縮尺1」キー66A・「縮尺2」キー66B・「縮尺3」66Cの尺度のデータと、「目的地」キー62Bによって設定した目的地JP1の地点の位置値のデータと、「走錨」キー62Cによって設定した錨を下ろした地点の位置値のデータと、
【0117】
「カーソル」キー62Hによって表示したカーソルの交点、すなわち、指定点CPの地点の位置値と、「カーソル図形」、すなわち、後記の大カーソルCLX・CLYと小カーソルCLZの図形のデータと、航跡の「接/断」キー63Dの操作によって設定した航跡「接」状態、または、航跡「断」状態を表すデータと、
【0118】
航跡を表示するために用いる位置値のデータを取り込む際に用いる「時間間隔」と「距離間隔」のデータと、「復帰」キー62Jを操作したときに復帰すべき位置と尺度のデータと、その他の表示条件に関連するデータ、例えば、「航法切換」キー62Gによって設定した航法の種別のデータなどを記憶するように構成してある。
【0119】
マーク関連データ記憶領域73B2には、例えば、マーク設定操作部分64Xにおける「マーク色」スイッチ64Aで選択した「色」のデータと、「○」キー64B・「□」キー64C・「▽」キー64D・「×」キー64Eのいずれかを操作して設定されるマークの形状と、その地点とのデータとを、設定された順に順次にマーク番号のデータを付して記憶するように構成してある。
【0120】
航跡関連データ記憶領域73B3には、航跡設定操作部分63Xにおける航跡の「接/断」キー63Dを操作して「接」状態にしたときの「時間間隔」または「距離間隔」によって取り込まれた自船位置10aの「地点」データ、例えば、緯度経度値と、
【0121】
その地点データが航跡の継続点に該当するか否かを定める「属性」データと、航跡設定操作部分63Xの「航跡色」スイッチ63Aによって設定した「色」のデータと、その「地点」のデータとを、航跡データとして、順次に、記憶するように構成してある。
【0122】
第4には、新たに、図1の〔ブロック構成〕において、保持用メモリ70Xを追加し、この保持用メモリ70Xを、記憶保持用電池77のような電源を与えなくなくても記憶内容を保持できるメモリ、すなわち、電気的に書換可能で電気不要で記憶保持する記憶部分、例えば、フラッシュメモリで構成している。
【0123】
そして、保持用メモリ70Xには、表示条件データ記憶領域70X1・マーク関連データ記憶領域70X2・航跡関連データ記憶領域70X3・地図データ記憶領域70X4を設けてある。
【0124】
表示条件データ記憶領域70X1・マーク関連データ記憶領域70X2・航跡関連データ記憶領域70X3には、図3の作業用メモリ(2)73Bにおける表示条件データ記憶領域73B1・マーク関連データ記憶領域73B2・航跡関連データ記憶領域73B3の記憶内容を保存し、地図データ記憶領域70X4には、図13の〔ブロック構成〕における地図データ用メモリ75に代えて、地図データを記憶保存している。
【0125】
第5には、処理用メモリ72に、図4の制御処理フローによるプログラム、または、図5の制御処理フローによるプログラムを記憶させて、表示の制御処理を行うことにより、上記の〔第1の課題〕を解決するようにした箇所である。
【0126】
以下、図4の制御処理フローを説明する。図4の制御処理フローは、航行情報処理部分70における主要な制御処理を行うためのメイン制御処理ルーチンのサブルーチンとして構成してあり、例えば、1秒ごとに、図4の制御処理フローに移行してくるように構成してある。
【0127】
〔図4の制御処理フローの説明〕
◆ステップSP1では、「移動」操作が行われたか否かを判別する。「移動」操作が行われたときは次のステップSP2に移行し、そうでないときはメイン制御処理ルーチンの所定のステップ箇所に戻る。
【0128】
ここでの判別は、任意方向移動操作部分68によって、カーソルCLX・CLYの交点、すなわち、指定点CPを移動する移動操作、または、画面を移動する移動操作を行った入力のデータがあるか否かによって判別する。なお、必要に応じて、後記のステップSP3での判別を容易にするためのフラグ、例えば、「F1」を記憶する。
【0129】
◆ステップSP2では、「復帰」のために用いるデータとして、移動操作を行う直前の表示画面81に表示している画像の尺度の値と、画像の所定の位置の地点、例えば、図14の画像の中央位置P10の地点の位置値とのデータを取り込んで、作業用メモリー(2)73Bに「復帰」データとして記憶した後に、ステップSP4に移行する。以前の「復帰」データが記憶されているときは、それを新しい「復帰」データに書き換える。
【0130】
◆ステップSP3では、上記のステップSP1で説明した移動操作が、再度、行われたか否かを判別する。ここでの判別は、上記のステップSP1と同様に行うが、必要に応じて、上記のフラグ「F1」の有無を判別する。
◆ステップSP4では、上記の移動操作に対応した移動処理を行った後に、次のステップSP5に移行する。
【0131】
◆ステップSP5では、「拡大」操作または「縮小」操作が行われたか否かを判別する。「拡大」操作または「縮小」操作が行われたときは次のステップSP6に移行し、そうでないときはステップSP7に移行する。
【0132】
ここでの判別は、「縮尺1」キー66A・「縮尺2」キー66B・「縮尺3」キー66C・「拡大」キー66D・「縮小」キー66Fによって、画面を拡大または縮小する「拡大」「縮小」操作を行った入力のデータがあるか否かによって判別する。
◆ステップSP6では、上記の「拡大」「縮小」操作に対応した「拡大」「縮小」処理を行った後に、次のステップSP7に移行する。
【0133】
◆ステップSP7では、「復帰」操作が行われたか否かを判別する。「復帰」操作が行われたときは次のステップSP8に移行し、そうでないときはステップSP3に戻る。
ここでの判別は、「復帰」キー62Jよって、画面を元の表示状態に戻すための「復帰」操作を行った入力のデータがあるか否かによって判別する。
【0134】
◆ステップSP8では、上記のステップSP2で記憶した「復帰」データを読み出した後に、次のステップSP9に移行する。
◆ステップSP9では、「復帰」データにもとづいて、ステップSP1での移動操作以前における画面を再生表示する処理を行った後に、メイン制御処理ルーチンの所定のステップ箇所に戻る。
【0135】
なお、上記のステップSP2において「復帰」データとして記憶する移動操作の直前における「画像の所定の位置の地点」としては、上記の「画像の中央位置の地点」、例えば、図14の中央位置P10の地点と、「画像の四隅点のうちの任意の地点」、例えば、図14の四隅点P11〜P14のうちの任意の地点と、「自船位置の地点」、例えば、図14の自船位置10aの地点とのうちのいずか1つまたは複数を記憶するように構成すれば、その地点を表示基準点として、元の画像状態、または、自船位置10aを中央にした元の尺度の画像状態に戻すことができるわけである。
【0136】
また、上記のステップSP2において「復帰」データとして記憶する移動操作の直前における「画像の尺度」としては、例えば、図14の表示画面81の「横方向または縦方向の幅BBまたはHBに対応する距離値」もしくは「縮尺率」を記憶するように構成すれば、その「距離値」または「縮尺率」によって、元の尺度の画像状態に戻すことができるわけである。
【0137】
なお、上記のステップSP6の「拡大」「縮小」処理を行わずに、「復帰」キー62Jが操作されたときも、記憶された「復帰」データによって、同様に、元の画像状態に戻すことができるわけである。
【0138】
したがって、元の位置に戻す操作を行った後に、元の尺度に戻すという複雑な操作を行わずに、元の元の画像状態、または、自船位置10aを中央にした元の尺度の画像状態に戻し得るので、上記の〔第1の課題〕を解決し得たことになる。
【0139】
上記の図4の制御処理フローでは、「復帰」キー62Jを用いるように構成してあるが、「復帰」キー62Jを設けずに、「カーソル」キー62H、「中央」キー66Dを併用して、上記と同様の「復帰」動作を行わせることができる。
【0140】
そして、前者の「カーソル」キー62Hを用いる場合には、後記の図5の制御処理フローのように、「復帰」表示処理と同時にカーソルCLX・CLYの消去を行わせることができ、後者の「中央」キーを用いる場合には、上記の記憶する「画像の所定の位置の地点」を「画像の中央位置の地点」として場合と同様の動作を行わせることができる。
【0141】
以下、図5の制御処理フローを説明する。図5の制御処理フローは、航行情報処理部分70における主要な制御処理を行うためのメイン制御処理ルーチンのカーソルの「表示」状態に付随するサブルーチンとして構成してあり、カーソルCLX・CLYが表示されている状態のときに、例えば、1秒ごとに、図5の制御処理フローに移行してくるように構成してある。
【0142】
〔図5の制御処理フローの説明〕
図5の制御処理フローが、図4の制御処理フローと異なる箇所は、ステップSP1・ステップSP3・ステップSP7・ステップSP10の箇所のみなので、ここでは、これらのステップのみについて説明する。
【0143】
◆ステップSP1が、図4のステップSP1と異なる箇所は、判別する対象を、カーソルCLX・CLYの交点、すなわち、指定点CPを移動する移動操作が行われたか否かを判別するように変更した箇所である。
【0144】
◆ステップSP3が、図4のステップSP3と異なる箇所は、判別する対象を、カーソルCLX・CLYの交点、すなわち、指定点CPを、再度、移動する移動操作が行われたか否かを判別するように変更した箇所である。
【0145】
◆ステップSP7が、図4のステップSP7と異なる箇所は、カーソルCLX・CLYを消去する「カーソル消去」操作が行われたか否かを判別し、「カーソル消去」操作が行われたときは次のステップSP8に移行し、そうでないときはステップSP3に戻るように変更した箇所である。
【0146】
ここでの判別は、「カーソル」キー62Hを操作して、カーソルCLX・CLYを消去するための「カーソル消去」操作を行った入力のデータがあるか否かによって判別する。
【0147】
なお、この構成の場合には、カーソルCLX・CLYを表示している状態においては、移動の有無にかかわらず、「カーソル」キー62Hを操作するとカーソルCLX・CLYを消去するように構成してある。
したがって、「カーソル消去」と上記の〔第1の課題〕の解決とを同時に行わせることができるわけである。
【0148】
つまり、この第1実施例の構成は、概括的には、第1には、上記のような
自船位置10aの地点を含む航行関連情報の画像を所定の尺度、例えば、縮尺1/10000で表示する第1の表示状態、例えば、図14のような表示状態から、上記の自船位置10aから離れた他の地点、例えば、目的地点JP1を含む航行関連情報の画像を上記の尺度1/10000を他の尺度、例えば、1/400に変更して表示する第2の表示状態、例えば、図17のような表示状態に変更して表示し得るようにした航法装置100において、
【0149】
上記の他の地点、例えば、目的地点JP1と、上記の変更する尺度、例えば、1/400とを指定する操作を行うことにより、上記の第1の表示状態の画像、例えば、図14のような表示状態の画像における所定の位置の地点、例えば、画像の中央位置の中央と、上記の所定の尺度、例えば、1/10000とを記憶するとともに、上記の第1の表示状態、例えば、図14のような表示状態から、上記の第2の表示状態、例えば、図17のような表示状態に移行する第1の表示移行手段と、
【0150】
単一の操作、例えば、「復帰」キー62J、「カーソル」キー62H、「中央」66Eなどのうちのいずれか1つのキーを単に操作することにより上記の記憶を読み出して、上記の第2の表示状態、例えば、図17のような表示状態から、上記の第2の表示状態、例えば、図14のような表示状態に移行する第2の表示移行手段とを設けた上記の第1の構成を構成しているものである。
【0151】
また、第2には、上記の第1の構成において、
上記の所定の位置の地点を、上記の第1の表示状態、例えば、図14のような表示状態の画像の中央位置P10の地点、上記の第1の表示状態、例えば、図14のような表示状態の画像の四隅点P11〜P14のうちの任意の地点、上記の自船位置10aの地点のうちのいずか1つまたは複数とした上記の第2の構成を構成しているものである。
【0152】
さらに、第3には、上記の第1の構成または第2の構成において、
各上記の尺度を上記の表示を行う表示画面、例えば、図14の表示画面81の横方向または縦方向の幅BBまたはHBに対応する距離値もしくは縮尺率とした上記の第3の構成を構成しているものである。
そして、これらの第1の構成〜第3の構成によれば、上記のように、上記の〔第1の課題〕を解決しているものである。
【0153】
〔第2実施例〕
以下、図1〜図3・図6・図7により第2実施例を説明する。この第2実施例の構成は、上記の第1実施例における図1〜図3の構成において、図6・図7のマーク構成を設けた構成であり、各マークの中に位置付けられている各所定の地点の真の位置を指示するための図形を追加することよって、上記の〔第2の課題〕を解決し得るようにしたものである。
【0154】
図6において、〔円形マーク〕〔四角形マーク〕〔三角形マーク〕の各図形は、マークを付して表示する各所定の地点、例えば、図7の自船位置10a・目的地点JP1・留意地点EV1・留意地点EV2などを識別するために、概略位置図形64Xと、真位置図形64Y1・64Y2とによって表示するように構成してある。
【0155】
そして、概略位置図形64Xは、これらの地点を大略的に識別するために、これらの地点を囲む円形・四角形・逆三角形などの図形にしてあり、また、真位置図形64Y1・64Y2は、概略位置図形64Xの中のこれらの地点の真の位置を指示するために、真位置図形64Y2では概略位置図形64Xよりも小さい小点状の図形に、真位置図形64Y1では概略位置図形64Xよりも小さい十文字状の図形にしてある。なお、十文字状の図形では十文字の交点を真の位置としている。
【0156】
また、真位置図形64Y1・64Y2は、真の位置を指示する箇所が概略位置図形64Xの中に位置付けられていればよいので、図6の中央の列または右側の列の図形のように、概略位置図形64Xの中の偏心した位置に真位置図形64Y1・64Y2を位置付けて表示してもよいものである。なお、真位置図形64Y1の十文字状の図形には、斜めの十文字、すなわち、「×」形の図形にして構成する場合を含むものである。
【0157】
したがって、各マークを判別し易くするために、図7のように、概略位置図形64Xを従来のマークの大きさよりも大きくしても、真位置図形64Y1・64Y2によって、マークを付した地点の真の位置を明確に判別し得るので、上記の〔第2の課題〕を解決し得たことになるわけである。
【0158】
つまり、この第2実施例の構成は、概括的には、第1には、上記のような
自船位置10aの地点を含む航行関連情報の画像を所定の尺度、例えば、縮尺1/10000で表示する表示、例えば、図14のような表示と、上記の自船位置10aから離れた他の地点、例えば、目的地点JP1を含む航行関連情報の画像を上記の尺度1/10000を他の尺度、例えば、1/400に変更して表示する表示、例えば、図17のような表示とを行い得るようにした航法装置100において、
【0159】
各上記の航行関連情報に付随する各所定の地点、例えば、自船位置10a・目的地点JP1・留意地点EV1・留意地点EV2などを大略的に識別するための上記の各所定の地点を囲む図形、例えば、概略位置図形64Xを表示するとともに、上記の図形の中の上記の各所定の地点、例えば、自船位置10a・目的地点JP1・留意地点EV1・留意地点EV2などの真の位置を指示するための図形、例えば、真位置図形64Y1・64Y2を表示する地点識別図形表示手段を設けた第4の構成を構成しているものである。
【0160】
また、第2には、上記の第4の構成において、
例えば、図7の〔円形マーク〕〔四角形マーク〕〔三角形マーク〕のように、上記の地点を囲む図形、例えば、概略位置図形64Xを円形または多角形による第1の図形とし、上記の真の位置を指示するための図形、例えば、真位置図形64Y1・64Y2を上記の第1の図形よりも小さい点状または十文字状の第2の図形とした上記の第5の構成を構成しているものである。
そして、これらの第4の構成・第5の構成によれば、上記のように、上記の〔第2の課題〕を解決しているものである。
【0161】
〔第3実施例〕
以下、図1〜図3・図8・図9により第3実施例を説明する。この第3実施例の構成は、上記の第1実施例における図1〜図3の構成において、図8・図9の記憶保存構成を設けた構成であり、作業用メモリ(2)73Bに記憶している記憶内容と、保存用メモリ70Xの対応する記憶領域部分の記憶内容とを、装置の電源を投入したときのみ、同一化することによって、上記の〔第3の課題〕を解決し得るようにしたものである。
【0162】
図8において、作業用メモリ(2)73Bの記憶内容は図3の作業用メモリ(2)73Bの記憶内容を簡略化して記載したものであり、保存用メモリ70Xの記憶内容は、作業用メモリ(2)73Bの記憶領域に対応する表示条件データ記憶領域70X1・マーク関連データ記憶領域70X2のほかに、航跡関連データ記憶領域70X3を2つの記憶領域に分けた航跡関連データ記憶領域(1)70X3(1)・航跡関連データ記憶領域(2)70X3(2)と、地図データ記憶領域70X4とが設けてある。
【0163】
航跡関連データ記憶領域(1)70X3(1)の部分が、作業用メモリ(2)73Bの航跡関連データ記憶領域73B3に対応しており、航跡関連データ記憶領域(2)70X3(2)の部分は、図2の航跡設定操作部分63Xにおける「記憶」キー63Bの操作によるメニュー画面により、航跡番号などの特定の記憶事項を付した航跡に含まれる全ての航跡点データ・マークデータを記憶する記憶領域の部分である。
【0164】
また、図2の航跡設定操作部分63Xにおける「呼出」キー63Cの操作によって図14の過去航跡CR2を呼出すときは、航跡関連データ記憶領域(2)70X3(2)の部分の記憶内容を読み出して表示するものである。
【0165】
地図データ記憶領域70X4には、予め、地図データを記憶してあり、必要に応じて、適宜の入力部分(図示せず)から、新たな地図データを与えて、記憶内容を書き換えるように構成する。
【0166】
保存用メモリ70Xは、電気的に書換可能で電気不要で記憶保持する不揮発のメモリ、例えば、フラッシュメモリで構成してあり、フラッシュメモリには、図示していないが、各書換ブロック別に書換を行うための制御回路部分が設けてあり、所定のデータによるコード信号を与えることによって、まず、指定した書換ブロックの記憶内容が消去され、その消去が終了した信号にもとづいて、書換を行う記憶内容のデータを与えて、その書換ブロックに記憶させることができる機能が設けられている。
【0167】
そして、書換ブロックrm1〜rmnを作業用メモリ(2)73Bの記憶内容と対応させる部分とし、書換ブロックrn1〜rnnを航跡関連データ記憶領域(2)70X3(2)の部分とし、書換ブロックro1〜ronを地図データ記憶領域70X4とするように割り当てている。
【0168】
ところで、作業用メモリ(2)73Bの記憶内容は記憶保持用電池77を与えて記憶保持しているので、電池の不良などによって、記憶内容が乱されてしまい、また、保存用メモリ70Xの記憶内容は何らかの信号操作の誤りに起因して記憶内容が部分的に消失してしまうことがある。
【0169】
このため、作業用メモリ(2)73Bの各記憶領域73B1〜73B3の記憶部分と、この記憶部分に対応する保存用メモリ70Xの記憶領域70X1〜70X3(1)の記憶部分とには、例えば、これらの各記憶領域の記憶内容の特定箇所、例えば、各記憶領域の冒頭箇所に、記憶内容を確認するためのチェックビットの部分を設けるとともに、このチェックビットの部分に、予め定めたコード、例えば、01〜XXのコードを記憶してあり、このチェックビットの記憶状態、すなわち、01〜XXの記憶が予め定めたとおりの状態になっているときは、記憶内容が保全されているものとして判別するように構成している。
【0170】
なお、チェックビット01〜XXの部分は、具体的には、例えば、各記憶領域73B1〜73B3・70X1〜70X3(1)ごとに、その冒頭における4バイトの部分、すなわち、32ビットの部分に4ビットによる2進数の01〜08、すなわち、「0001」「0010」「0011」「0100」「0101」「0110」「0111」「1000」を記憶しておくように構成している。
【0171】
そして、作業用メモリ(2)73Bまたは保存用メモリ70Xに、上記の記憶内容の部分的な消失が生じた場合に、この消失を救済するための制御処理として、処理用メモリ72に、図9の制御処理フローによるプログラムを記憶させて、記憶の制御処理を行うことにより、上記の〔第3の課題〕を解決するようにした箇所である。
【0172】
以下、図9の制御処理フローを説明する。図9の制御処理フローは、航行情報処理部分70における主要な制御処理を行うためのメイン制御処理ルーチンのサブルーチンとして構成してあり、上記のように、電源スイッチ67Bまたは基幹電源スイッチ51の操作によって、装置の動作電源が与えられた直後にのみ、図9の制御処理フローに移行してくるように構成してある。
【0173】
〔図9の制御処理フローの説明〕
◆ステップSP1では、作業用メモリ(2)73Bのチェックビットと、保存用メモリ70Xのチェックビットとの記憶内容を取り込んで次のステップSP2に移行する。
【0174】
◆ステップSP2では、作業用メモリ(2)73Bのチェックビットの記憶コード01〜XXと、保存用メモリ70Xのチェックビットの記憶コード01〜XXとを確認して、そのいずれもが正常であるか否かを判別する。いずれもが正常であるときはステップSP6に移行し、そうでないときは次のステップSP3に移行する。
【0175】
◆ステップSP3では、作業用メモリ(2)73Bのチェックビットの記憶コード01〜XXが正常であるか否かを判別する。正常であるときはステップSP6に移行し、そうでないときは次のステップSP4に移行する。
【0176】
◆ステップSP4では、保存用メモリ70Xのチェックビットの記憶コード01〜XXが正常であるか否かを判別する。正常であるときはステップSP7に移行し、そうでないときは次のステップSP5に移行する。
【0177】
◆ステップSP5では、作業用メモリ(2)73B・保存用メモリ70Xのいずれもが異常状態、すなわち、「メモリ故障」である旨の警報を表示画面81に表示するとともに、適宜の警音部分(図示せず)、例えば、圧電ブザーなどにより警音する状態にした後に、メイン制御処理ルーチンの所定のステップ部分に移行する。
【0178】
◆ステップSP6では、作業用メモリ(2)73Bに記憶されている記憶内容の全てを、保存用メモリ70Xの対応記憶箇所、すなわち、書換ブロックrm1〜rmnに記憶する書換動作を行って、記憶内容を同一化した後に、メイン制御処理ルーチンの所定のステップ部分に移行する。
【0179】
◆ステップSP6では、保存用メモリ70Xの記憶内容のうちの作業用メモリ(2)73Bに対応する記憶箇所、すなわち、書換ブロックrm1〜rmnに記憶されている記憶内容の全てを、作業用メモリ(2)73Bに記憶する書換動作を行って、記憶内容を同一化した後に、メイン制御処理ルーチンの所定のステップ部分に移行する。
【0180】
なお、上記のステップSP2〜SP4での判別は、例えば、チェックビットの記憶コード01〜XXの各コードの2進数の総和の数が所定値になっているか否かによって判別することができる。
【0181】
上記の制御処理によれば、電源の投入・遮断が基幹電源スイッチ51によって行われたときでも、航法装置100に電源が投入される度ごとに、作業用メモリ(2)73Bの記憶内容と、この記憶内容に対応する保存用メモリ70Xの書換ブロックrm1〜rmnの記憶内容とが同一化される。
【0182】
そして、両方のメモリの記憶内容または作業用メモリ(2)73Bの記憶内容のみが正常のときは、常に、保存用メモリ70Xの書換ブロックrm1〜rmnが新しい記憶内容に書換保存される。
【0183】
また、保存用メモリ70Xの書換ブロックrm1〜rmnの記憶内容のみが正常のときは、その記憶内容が作業用メモリ(2)73Bに記憶し直されるので、当面における航行関連情報の画像表示動作には、一応、不都合がない程度に記憶内容を修復することができるので、上記の〔第3の課題〕を解決し得たことになるわけである。
【0184】
つまり、この第3実施例の構成は、概括的には、第1には、上記の第4の構成における航法装置100と同様の航法装置100において、
各上記の関連情報のうちの所定の情報、例えば、表示条件データ・マーク関連データ・航跡関連データの情報を記憶するための記憶部分として、上記の記憶を電気的に書換可能で電気的に記憶保持する揮発性記憶部分、例えば、スタティクRAMを記憶保持用電池77で記憶保持する作業用メモリ(2)73Bと、上記の記憶を電気的に書換可能で電気不要で記憶保持する不揮発性記憶部分、例えば、フラッシュメモリによる保存用メモリ70Xとを設ける記憶部併設手段と、
【0185】
例えば、電源スイッチ67Bまたは基幹電源スイッチ51により、装置の動作電源が投入されたときのみ、上記の不揮発性記憶部分、例えば、保存用メモリ70Xと、上記の揮発性記憶部分、例えば、作業用メモリ(2)73Bとの対応する記憶内容、例えば、表示条件データ記憶領域70X1・マーク関連データ記憶領域70X2・航跡関連データ記憶領域(1)70X3(1)の記憶内容と表示条件データ記憶領域73B1・マーク関連データ記憶領域73B2・航跡関連データ記憶領域73B3を同一にするための処理、例えば、図9の制御処理フローによる処理を行う記憶同一化処理手段とを設けた上記の第6の構成を構成しているものである。
【0186】
また、第2には、上記の第6の構成において、
上記の揮発性記憶部分を、例えば、作業用メモリ(2)73BのスタテイックRAMと記憶保持用電池77とで構成し、上記の不揮発性記憶部分を、例えば、保存用メモリ70Xのフラッシュメモリで構成した上記の第7の構成を構成しているものである。
そして、これらの第6の構成・第7の構成によれば、上記のように、上記の〔第3の課題〕を解決しているものである。
【0187】
〔第4実施例〕
以下、図1〜図3・図7・図10により第4実施例を説明する。この第4実施例の構成は、上記の第1実施例における図1〜図3の構成において、図7・図10のような2つのカーソルを表示する構成を設けたものである。
【0188】
図7において、従来技術と同様のカーソルCLX・CLYを「大形のカーソル」とし、図7に示したような十文字状の図形による小形カーソルCLZを「小形のカーソル」として構成するとともに、十文字の交点の箇所を指定点CPにしている。また、十文字状の図形は縦横1cm程度の大きさにして、比較的に判別し易くしている。
【0189】
なお、「大形のカーソル」は、カーソルCLX・CLYを実線に変更して表示してもよく、また、小形カーソルCLZの十文字状の図形には、斜めの十文字、すなわち、「×」形の図形に表示する場合を含むものである。
【0190】
そして、作業用メモリ(2)73Bに記憶しているカーソル図形を上記の「大形のカーソル」と「小形のカーソル」との2種類にして記憶するとともに、カーソルが異動しているときは「大形のカーソル」を、カーソルが停止しているときは「小形のカーソル」を表示するために、処理用メモリ72に、図10の制御処理フローによるプログラム記憶させて、表示の制御処理を行うことにより、上記の〔第4の課題〕を解決するように構成したものである。
【0191】
以下、図10の制御処理フローを説明する。図10の制御処理フローは、航行情報処理部分70における主要な制御処理を行うためのメイン制御処理ルーチンのサブルーチンとして構成してあり、例えば、1秒ごとに、図10の制御処理フローに移行してくるように構成してある。
【0192】
〔図10の制御処理フローの説明〕
◆ステップSP1では、「カーソル」を表示する操作が行われたか否かを判別する。「カーソル」を表示する操作が行われたときは次のステップSP2に移行し、そうでないときはメイン制御処理ルーチンの所定のステップ箇所に戻る。
【0193】
ここでの判別は、図2の目的地等設定操作部分62Xにおける「カーソル」キー62Hによってカーソルを表示する操作を行った入力のデータがあるか否かによって判別する。
◆ステップSP2では、小形カーソルCLZを表示した後に、次のステップSP3に移行する。
【0194】
◆ステップSP3では、「カーソル」を移動する操作が行われたか否かを判別する。「カーソル」を移動する操作が行われたときはステップSP6に移行し、そうでないときは次のステップSP4に移行する。
【0195】
ここでの判別は、任意方向移動操作部分68をいずれかの方向に操作することにより、「カーソル」を移動する操作を行った入力のデータがあるか否かによって判別する。
【0196】
◆ステップSP4では、「カーソル」を消去する操作が行われたか否かを判別する。「カーソル」を消去する操作が行われたときは次のステップSP5に移行し、そうでないときはステップSP3に戻る。
ここでの判別は、「カーソル」キー62Hによってカーソルを消去する操作を行った入力のデータがあるか否かによって判別する。
【0197】
◆ステップSP5では、「カーソル」を消去した後に、メイン制御処理ルーチンの所定のステップ箇所に戻る。
◆ステップSP6では、「大形のカーソル」、すなわち、カーソルCLX・CLYを表示した後に、次のステップSP7に移行する。
【0198】
◆ステップSP7では、「カーソル」を停止する操作が行れたか否かを判別する。「カーソル」を停止する操作が行われたときはステップSP2に戻り、そうでないときは、このステップSP7を繰り返す。
【0199】
ここでの判別は、任意方向移動操作部分68を停止位置、例えば、ジョイスティクの中立位置に位置付けて、「カーソル」を移動する入力のデータが無い状態にしたか否かによって判別する。
【0200】
したがって、この第4実施例の構成によれば、「カーソル」を移動状態にしたときは「大形のカーソル」、すなわち、カーソルCLX・CLYが表示されるので、従来と同様に、指定点CPを目的とする箇所に容易に合致させることができる。
【0201】
また、「カーソル」を停止状態にしてときは小形カーソルCLZが表示されるので、大形のカーソルCLX・CLYに邪魔されずに、画像の他の箇所を見ることができるので、上記の〔第4の課題〕を解決し得たことになる。
【0202】
なお、小形カーソルCLZの指定点CPには、必要に応じて、大形のカーソルCLX・CLYの指定点CPに図示したと同様の「◎」マークを表示するように構成することを含むものである。
【0203】
つまり、この第4実施例の構成は、概括的には、第1には、上記の第4の構成における航法装置100と同様の航法装置100において、
各上記の表示状態の表示を行う画面、例えば、図7のような表示画面81における任意の点を指定するために、上記の画面の中を移動可能で上記の任意の点を通るカーソル、例えば、「大形のカーソル」または「小形のカーソル」を表示するカーソル表示手段と、
【0204】
上記のカーソルの移動中は上記のカーソルを上記の画面、例えば、表示画面81の横方向全体BBにわたる横線と上記の画面の縦方向全体HBにわたる縦線とによる大形のカーソル、例えば、カーソルCLX・CLYにより表示し、上記のカーソルの停止中は上記のカーソルを上記の任意の点の部分のみ指示する小形のカーソル、例えば、小形カーソルCLZにより表示する大小カーソル表示手段とを設けた上記の第8の構成を構成しているものである。
【0205】
第2には、上記の第8の構成において、
上記の大形のカーソル、例えば、カーソルCLX・CLYの上記の横線と上記の縦線とを点線または実線で表示し、上記の小形のカーソル、例えば、小形カーソルCLZを縦横1cm程度の十文字状の図形とした上記の第9の構成を構成しているものである。
そして、これらの第8の構成・第9の構成によれば、上記のように、上記の〔第4の課題〕を解決しているものである。
【0206】
〔第5実施例〕
以下、図1〜図3・図11・図12により第5実施例を説明する。この第5実施例の構成は、上記の第1実施例における図1〜図3の構成において、図11・図12のような航跡の地点データの自動取込構成を設けた構成である。
【0207】
図2において、航跡設定操作部分63Xにおける航跡の「接/断」キー63Dの操作による「接」状態に、「距離間隔」の「接」状態と、「時間間隔」の「接」状態と、「自動間隔」の「接」状態との3つの「接」状態を設けて構成してある。
【0208】
「距離間隔」の「接」状態では、航跡の地点データの取込間隔、すなわち、自船位置10aのデータを取り込んで記憶する間隔を、所定の距離間隔、例えば、移動距離100mごとの間隔で行う状態、例えば、図12の距離間隔取込記憶DPを行う状態になる。なお、図12において、ごく小さい○印の箇所は実際には表示されないが、取込記憶の状態を理解し易くするために画いたものである。
【0209】
「時間間隔」の「接」状態では、航跡の地点データの取込間隔を、所定の時間間隔、例えば、10秒ごとの間隔で行う状態、例えば、図12の時間間隔取込記憶TPを行う状態になる。
【0210】
「自動間隔」の「接」状態、すなわち、上記の自動取込構成による状態では、図12のように、自船速度10bが、所定の速度以上10bS2、例えば、3ノット以上のときは、自動的に、上記の「距離間隔」の「接」状態、例えば、図12の時間間隔取込記憶TPを行う状態になり、所定の速度未満10bS1、例えば、3ノット未満のときは、自動的に、上記の「距離間隔」の「接」状態、例えば、図12の距離間隔取込記憶DPの状態になるように動作する。
【0211】
さらに、「自動間隔」の「接」状態において、「時間間隔」の「接」状態から「距離間隔」の「接」状態に戻るときには、上記の所定の速度10bS、例えば、3ノットよりも、「−α」、例えば、1ノット分だけ低い速度、例えば、2ノットの速度になるまで、「距離間隔」の「接」状態に戻らないようにした動作、すなわち、例えば、図12の〔ヒステリヒス動作〕を行わせるように構成してある。
【0212】
なお、このヒステリヒス動作は、自船速度10bが所定の速度10bS、例えば、3ノット付近でふらふら変動している場合に、それにしたがって、距離間隔取込記憶DPと時間間隔取込記憶TPとが頻繁に切り換えられ、制御の混乱を招くことを防止するために行う動作である。
【0213】
そして、図3の作業用メモリ(2)73Bの表示条件データ記憶領域73B1に、上記の動作に必要なデータを記憶するとともに、処理用メモリ72に、図11の制御処理フローによるプログラム記憶させて、表示の制御処理を行うことにより、上記の「自動間隔」の「接」状態の動作を行わせて、上記の〔第5の課題〕を解決するように構成したものである。
【0214】
以下、図11の制御処理フローを説明する。図11の制御処理フローは、航行情報処理部分70における主要な制御処理を行うためのメイン制御処理ルーチンのサブルーチンとして構成してあり、航跡の「接/断」キー63Dを「接」状態にしたデータを読み取ったときに、図11の制御処理フローに移行してくるように構成してある。
【0215】
〔図11の制御処理フローの説明〕
◆ステップSP1では、「自動間隔」の「接」状態にする操作が行われたか否かを判別する。「自動間隔」の「接」状態にする操作が行われたときは次のステップSP2に移行し、そうでないときはメイン制御処理ルーチンの所定のステップ箇所に戻る。
ここでの判別は、航跡の「接/断」キー63Dを操作して「自動間隔」の「接」状態にした入力のデータがあるか否かによって判別する。
【0216】
◆ステップSP2では、自船速度10bが上記の所定の速度未満10bS1、例えば、3ノット未満になっているか否かを判別する。所定の速度未満10bS1になっているときはステップSP10に移行し、そうでないときは次のステップSP3に移行する。
【0217】
◆ステップSP3では、ヒステリヒス動作を行わせるための「−α」、例えば、−1ノットを設定した後に、次のステップSP4に移行する。なお、既に「−α」が設定されているときは、そのまま、次のステップSP4に移行する。
【0218】
ここでの「−α」の設定は、ステップSP2で判別する所定の速度未満10bS1、例えば、3ノット未満の値を「−α」、例えば、−1ノットした2ノット未満に変更するデータを、例えば、作業用メモリ(2)73Bの表示条件データ記憶領域73B1に記憶する動作を行う。
【0219】
◆ステップSP4では、上記の時間間隔取込記憶TPを1回数だけ行った後に、次のステップSP5に移行する。ここでの取込記憶は、作業用メモリ(2)73Bの航跡関連データ記憶領域73B3の地点のデータに記憶する。
【0220】
なお、上記のステップSP3での「−α」の設定が行われたとき、すなわち、初回の時間間隔取込記憶TPのときは、直ちに、自船位置10aのデータを取り込むとともに、時計回路76による所定の時間間隔、例えば、10秒こどの計時を行わせ、次回以後の取込記憶の時間を決めるように動作する。
【0221】
◆ステップSP5では、その回の航跡において、初回の取込記憶、すなわち、航跡始点LSであるか否かを判別する。航跡始点LSであるときはステップSP12に移行し、そうでないときは次のステップSP6に移行する。
ここでの判別は、作業用メモリ(2)73Bの航跡関連データ記憶領域73B3に、航跡データが全く記憶されていないことによって判別する。
【0222】
◆ステップSP6では、前回の時間間隔取込記憶TPの地点、または、前回の距離間隔取込記憶DPの地点と、今回の時間間隔取込記憶TPの地点、または、今回の距離間隔取込記憶DPとの間を結ぶ線、すなわち、航跡素線LEを描画するデータを記憶した後に、次のステップSP7に移行する。
ここでのデータの記憶は、作業用メモリ(2)73Bの航跡関連データ記憶領域73B3の属性のデータを「継続」のデータにして記憶する。
【0223】
◆ステップSP7では、「自動間隔」の「接」状態を中止した状態にされたか否かを判別する。中止した状態にされたときは次のステップSP8に移行し、そうでないときはステップSP2に戻る。
ここでの判別は、ステップSP2で判別に用いたデータ、すなわち、「自動間隔」の「接」状態の入力のデータが無くなっているか否かによって判別する。
【0224】
◆ステップSP8では、航跡の「断」状態にされたか否かを判別する。航跡の「断」状態にされたときは次のステップSP9に移行し、そうでないときはメイン制御処理ルーチンの所定のステップ箇所、すなわち、上記の「距離間隔」の「接」状態または「時間間隔」の「接」状態の処理を行うステップに移行する。
ここでの判別は、航跡の「接/断」キー63Dを操作して「断」状態にした入力のデータがあるか否かによって判別する。
【0225】
◆ステップSP9では、航跡の「終点」のデータを記憶した後に、メイン制御処理ルーチンの所定のステップ箇所、すなわち、上記の航跡表示動作を終了する処理を行うステップに移行する。
ここでのデータの記憶は、作業用メモリ(2)73Bの航跡関連データ記憶領域73B3の属性は「不継続」なので、「継続」のデータを記憶しないことによって、航跡終点CREとしている。
【0226】
◆ステップSP10では、ヒステリヒス動作を行わせるために、ステップSP3で設定した「−α」を解除した後に、次のステップSP11に移行する。既に「−α」が解除されているときは、そのまま、次のステップSP4に移行する。
【0227】
ここでの「−α」の解除は、ステップSP3で、作業用メモリ(2)73Bの表示条件データ記憶領域73B1に記憶した「−α」のデータを、元の所定の速度3ノットに戻したデータに記憶し直す動作を行う。
【0228】
◆ステップSP11では、上記の距離間隔取込記憶DPを1回数だけ行った後に、ステップSP5に移行する。ここでの取込記憶は、作業用メモリ(2)73Bの航跡関連データ記憶領域73B3に記憶する。
【0229】
なお、上記のステップSP10での「−α」の解除が行われたとき、すなわち、初回の距離間隔取込記憶TDのときは、直ちに、自船位置10aのデータを取り込むとともに、自船位置10aの変化による距離値の変化を求める演算を開始して、所定の距離間間隔、例えば、100mこどの時点に、次回以後の取込記憶を行うように動作する。
【0230】
◆ステップSP12では、航跡の「始点」のデータを記憶した後に、ステップSP7に移行する。
ここでのデータの記憶は、作業用メモリ(2)73Bの航跡関連データ記憶領域73B3の属性は「不継続」なので、「継続」のデータを記憶しないことによって、航跡始点CRSとしている。
【0231】
したがって、上記の制御処理によれば、図12のように、所定速度値未満10bS1の航行状態の範囲では距離間隔取込記憶DPによって自船位置10aのデータが記憶され、所定速度値以上10bS2の航行状態の範囲では時間間隔取込記憶TPによって自船位置10aのデータが記憶される。
【0232】
このため、時間間隔取込記憶TPの部分では取込記憶を行う距離間隔がランダムにはなるが、所定速度値未満10bS1の航行状態の範囲での無駄な取込記憶が自動的に防止し得るので、上記の〔第5の課題〕を解決し得たことになる。
【0233】
そして、一般に、船舶では、蛇行した航路を航行する場合には速度を遅くして航行し、直線的な航路を航行する場合には速度を速くして航行するので、この第5実施例の構成によれば、自動的に、蛇行した航路での自船位置10aの取込記憶を比較的細かい距離間隔にして航跡を忠実に記録させ、また、直線的な航路では自船位置10aの取込記憶を比較的粗い時間間隔にしても、航路が直線的なので航路を忠実に記録させ得るので、航跡関連データ記憶領域70X3に記憶する記憶量の無駄を無くすることができる。
【0234】
なお、位置測定部分10にロランC電波航法またはデッカ電波航法による電波航法受信機を用いている場合などで、自船速度10bの演算が間に合わないときは、船舶のスクリュウ軸またはエンジンの回転数による速度を自船速度として上記の自船速度の判別を行うように構成することができる。
【0235】
つまり、この第5実施例の構成は、概括的には、上記の第4の構成における航法装置100と同様の航法装置100において、
上記の自船位置10aの位置値を、例えば、作業用メモリ(2)73Bの航跡関連データ記憶領域73B3に、取り込んで記憶した記憶内容にもとづいて自船の航跡、例えば、自船航跡CR1を表示する航跡表示手段と、
【0236】
自船速度10bが、所定値10bSに達しているとき、すなわち、所定速度以上10bS2のときは所定の時間間隔ごと、例えば、10秒に取り込んで上記の記憶を行い、上記の所定値10bSに満たないとき、すなわち、所定速度未満10bS1のときは所定の距離間隔ごと、例えば、100mごとに取り込んで上記の記憶を行う取込記憶手段とを設けた上記の第10の構成を構成しているものである。
【0237】
また、第2には、上記の第10の構成において、
上記の自船速度10bとして、上記の自船位置10aを測定する位置測定部分10、例えば、GPS電波航法による電波航法受信機により得られる自船速度10bを用いる上記の第11の構成を構成しているものである。
【0238】
さらに、第3には、上記の第10の構成・第11の構成において、
上記の所定値10bSの判別をヒステリヒス動作、例えば、図11の〔ヒステリヒス動作〕により行う上記の第12の構成を構成しているものである。
そして、これらの第10の構成〜第12の構成によれば、上記のように、上記の〔第5の課題〕を解決しているものである。
【0239】
〔変形実施〕
この発明は次のように変形して実施することを含むものである。
【0240】
(1)第1実施例の図4・図5による構成を図13・図15の構成に適用して構成する。
(2)第2実施例の図7による構成を図13・図15の構成に適用して構成する。
【0241】
(3)第3実施例における地図データ記憶領域70X4の部分を、図13・図15の構成のように、独立した地図データ用メモリ75、または、外部記憶部分90に変更して構成する。
【0242】
(4)第3実施例における保存用メモリ70Xを、他の構成をもつ電気的に書換可能で電気不要で記憶保持する記憶回路、例えば、各書換ブロック別に書換用の電圧と書換用の記憶データとを与えて各書換ブロック別に書換を行うようにしたフラッシュメモリなどに変更して構成する。
【0243】
(5)第3実施例における保存用メモリ70Xと作業用メモリ(2)73Bとを各記憶領域別に、または複数記憶領域別に構成して、同様の書換動作を行わせるように変更して構成する。
【0244】
(6)第3実施例における保存用メモリ70Xと作業用メモリ(2)73Bとの間の書換を、各記憶領域ごとに、チェックビット01〜XXの良否を判別し、その判別が良い方から悪い方に書換を行うように変更して構成する。
【0245】
(7)第3実施例におけるチェックビットの部分を、各記憶領域ごとに個別に設けずに、これらの記憶領域全体の特定の箇所のみに設けるように変更して構成する。
【0246】
(8)第4実施例における作業用メモリ(2)73Bにも、航跡関連データ記憶領域(2)70X3(2)と同様の記憶領域を設けた構成に、図9の制御処理を適用して構成する。
【0247】
(9)第5実施例における「自動間隔」の「接」状態の構成を図13・図15の構成に適用して構成する。
(10)第5実施例の構成において、「距離間隔」の「接」状態と、「時間間隔」の「接」状態との構成部分を除去し、「自動間隔」の「接」状態のみを設けて構成する。
【0248】
(11)第2実施例〜第5実施例の構成から「尺度の変更」を行う構成部分を除去して構成する。
(12)文字情報TTの表示を表示画面81の下方に1列または複数列にして表示する。
(13)第1実施例〜第5実施例の構成と上記(1)〜(12)の構成とのうちの任意の複数を組み合わせて構成する。
【0249】
(14)第1実施例〜第5実施例の構成と上記(1)〜(13)の構成における進路ずれの表示を行う部分を図16の進路ずれの構成に変更して構成する。
(15)第1実施例〜第5実施例の構成と上記(1)〜(14)の構成において、図11の〔ヒステリシス動作〕を、( )書きのように、所定値Sに対して±△Sだけ増減させた箇所でヒステリシス動作を行うように変更して構成する。
【0250】
(16)第1実施例〜第5実施例の構成と上記(1)〜(15)の構成において、位置測定部分10における自船位置10a・自船速度10b・現在進行方向10cを得るための演算処理の全部または一部を航行情報処理部分70に配置して構成する。
【図面の簡単な説明】
【0251】
図面中、図1〜図12はこの発明の実施例を、また、図13〜図18は従来技術を示し、各図の内容は次のとおりである。
【図1】全体ブロック構成・具体構成斜視図
【図2】要部具体構成正面図
【図3】要部記憶構成図
【図4】要部制御処理構成図
【図5】要部制御処理構成図
【図6】要部表示図形構成図
【図7】要部表示構成図
【図8】要部記憶保存構成図
【図9】要部制御処理構成図
【図10】要部制御処理構成図
【図11】要部制御処理構成図
【図12】要部表示構成図
【図13】全体ブロック構成・具体構成斜視図
【図14】要部表示構成図
【図15】要部具体構成正面図
【図16】要部表示構成図
【図17】要部表示構成図
【図18】要部表示構成図
【符号の説明】
【0252】
10 位置測定部分
10a 自船位置
10b 自船速度
10bS 所定速度
10bS1 所定速度未満
10bS2 所定速度以上
10c 現在進行方向
20 航行関連情報表示部分
50 船内電源
51 基幹電源スイッチ
52 内部電源
55 自己保持回路
60 設定操作部分
61 画面選択操作部分
62 目的地等設定操作部分
62X 目的地等設定操作部分
62A 「メニュー」キー
62B 「目的地」キー
62C 「走錨」キー
62D 「取消」キー
62E 「解除」キー
62F 「決定」キー
62G 「航法切換」キー
62H 「カーソル」キー
62J 「復帰」キー
63 航跡設定操作部分
63X 航跡設定操作部分
63A 「航跡色」スイッチ
63B 「記憶」キー
63C 「呼出」キー
63D 「接/断」キー
63E 「航跡消去」キー
64 マーク設定操作部分
64X マーク設定操作部分
64A 「マーク色」スイッチ
64B 「○」キー
64C 「□」キー
64D 「▽」キー
64E 「×」キー
64F 「マーク消去」キー
64X 概略位置図形
64Y1 真位置図形
64Y2 真位置図形
65 数値等設定操作部分
66 画面設定操作部分
66X 画面設定操作部分
66A 「縮尺1」キー
66B 「縮尺2」キー
66C 「縮尺3」キー
66D 「拡大」キー
66E 「中央」キー
66F 「縮小」キー
67 電源等操作部分
67A 「電源」キー
67B 電源スイッチ
67C 「輝度」キー
68 任意方向移動操作部分
69 カーソル等設定操作部分
70 航行関連情報処理部分
70X 保存用メモリ
70X1 表示条件データ記憶領域
70X2 マーク関連データ記憶領域
70X3 航跡関連データ記憶領域
70X3(1) 航跡関連データ記憶領域(1)
70X3(2) 航跡関連データ記憶領域(2)
70X4 地図データ記憶領域
71A 入出力ポート
71B 入出力ポート
70A CPU
72 処理用メモリ
73 作業用メモリ
73A 作業用メモリ(1)
73B 作業用メモリ(2)
73B1 表示条件データ記憶領域
73B2 マーク関連データ記憶領域
73B3 航跡関連データ記憶領域
74 航跡データ用メモリ
75 地図データ用メモリ
76 時計回路
77 記憶保持用電池
80 表示処理部分
80A CPU
81 表示画面
82 画像要素用メモリ
83 処理用メモリ
84 表示画像用メモリ
90 外部記憶部分
100 航法装置
B1a 距離幅
BB 横方向幅
CLX カーソル
CLY カーソル
CLZ 小カーソル
CP 指定点
CR1 自船航跡
CR2 過去航跡
CRE 航跡終点
CRS 航跡始点
DP 距離間隔取込記憶
E1 留意地点
E2 留意地点
HB 縦方向幅
JP1 目的地点
L1〜L5 航路線
LE 航跡素線
Ld 等深線
LX 緯度線
LY 経度線
M1 地図(海岸線)
P1〜P4 方向変更点(変針点)
P10 中央位置
P11〜P14 四隅点
RT1 計画航路(ルート)
rm1〜rmm 書換ブロック
rn1〜rnn 書換ブロック
ro1〜ron 書換ブロック
S 所定値
TP 時間間隔取込記憶
TT 文字情報
θ1 進路ずれ
【技術分野】
【0001】
この発明は、船舶の航行位置、航跡、航行目標地点、予定航路に関する情報およびこれらに付随する情報(この発明において、航行関連情報という)の画像を表示する航法装置に関するものである。
【背景技術】
【0002】
こうした航法装置としては、図13のように、自船の航行位置、すなわち、自船位置を測定する位置測定部分10、例えば、GPS電波航法、ロランC電波航法・デッカ電波航法などにより位置測定を行う位置測定部分と、航行関連情報の画像を表示する航行関連情報表示部分20とを別体にした構成(以下、第1従来技術という)が周知である。
【0003】
なお、以下に説明する各図において、同一符号で示す部分は、いずれかの図において説明する同一符号の部分と同一の機能をもつ部分である。また、地点または位置は、一般に、緯度経度値をもって表した地点または位置とするが、ロラン電波航法・デッカ電波航法を用いる場合には、その航法におけるLOP値で表した地点または位置としてもよい。
【0004】
また、上記の第1従来における位置測定部分10の所定部分、例えば、自船位置10a・自船速度10b・現在進行方向10cのデータを得る演算部分と航行関連情報表示部分20とを一体にした構成(以下、第2従来技術という)とが周知である。
【0005】
そして、上記の電波航法による位置測定部分10は、一般に、電波航法受信機とも呼ばれており、また、上記の航行関連情報表示部分20は、一般に、航跡記録装置とも呼ばれている。
【0006】
さらに、例えば、GPS電波航法による電波航法受信機を位置測定部分10とした場合には、自船位置のほかに、自船速度・現在進行方向をも測定し得るようにした構成(以下、第3従来技術という)が周知である。なお、GPS電波航法による電波航法受信機では、自船速度・現在進行方向をGPS電波の周波数のドップラー偏移量から測定し得るという特長がある。
【0007】
図13において、位置測定部分10、例えば、GPS電波航法受信機は、自船位置10a・自船速度10b・現在進行方向10cのデータを含む信号を航行関連情報の一部として、航行関連情報表示部分20に与える。
【0008】
航行関連情報表示部分20は、マイクロコンピュータを主体とする制御処理機能(以下、CPUという)70Aをもつ航行情報処理部分70、例えば、市販のCPUを主体にして構成した制御処理部分と、CPU70Aと共同動作するCPU80Aをもつ表示処理部分80、例えば、市販の描画処理用ICを主体にして構成した制御処理部分とで構成してある。
【0009】
そして、自船位置10a・自船速度10b・現在進行方向10cのデータは、入出力ポート71A、すなわち、I/O部分を介して、航行情報処理部分70に取り込まれ、自船位置10aのデータは、後記の設定操作部分60を操作して与えられた設定条件にもとづいて、所定の時間ごとに、または、所定の距離間隔ごとに取り込んで、航跡データ用メモリ74に記憶する。
【0010】
設定操作部分60は、例えば、所要の操作入力を、入出力ポート71B、すなわち、I/O部分を介して、航行情報処理部分70に与えるための操作キーなどの操作部分を配置した操作パネルであって、航行情報処理部分70によって所要の航行関連情報を得るための処理条件と、所要の航行関連条件を表示処理部分80の表示画面81に表示するための表示条件とを設定する操作部分であり、例えば、上記の自船位置10aのデータの取込条件のほか、表示尺度、緯度経度線の表示・消去、表示範囲の移動・拡大・縮小、地図の表示・消去などを設定または変更するための各操作キーを設けてある。
【0011】
航行情報処理部部分70は、入出力ポート71Bから取り込んだ設定信号60aによる設定データ、制御処理の過程上に必要なデータなどの記憶を行う作業用メモリ73と、上記の航跡データ用メモリ74と、地図を表示するためのデータを記憶する地図データメモリ75と、時間的なデータを得るための時計回路76と、マークやメニューなど固定的な図形や画面要素の指定データを記憶した処理用メモリ72とから所要の各データを取り込んで、処理用メモリ72に記憶した制御処理フローのプログラムにより所要の処理を行って得られる航行関連情報のデータを作業用メモリ73に記憶する。
【0012】
作業用メモリ73に記憶した航行関連情報のデータは、必要に応じて、航跡データ用メモリ74に記憶されている航行関連情報のデータ、地図データ用メモリ75に記憶されている航行関連情報のデータとともに、表示処理部分80に与えられる。なお、地図は、一般に、海岸線のみの図形を表示する場合と、海岸線の陸地側の部分を所定の色で塗りつぶした図形を表示する場合とのいずれか1つが用いられる。
【0013】
表示処理部分80では、CPU80Aが、情報処理部分70から与えられた各航行関連情報のデータを、画像要素メモリ82に記憶された描画用の画像要素のデータと、処理用メモリ83に記憶した制御処理用の処理フローのプログラムとにもとづいて処理することより、目的とする航行関連情報の画像、例えば、図14のように、
【0014】
自船航跡CR1、計画航路RT1、目的地点JP1、地図M1、緯度線LX・経度線LYなどの図形と、自船位置10a・自船速度10b・現在進行方向10c・目的地点JP1の数値、進行方向10cと計画航路RT1との差角θ1の数値などの文字TTとを表す画像のデータを、逐次、更新させながら表示画面用メモリ84に記憶するとともに、表示画面用メモリ84の記憶内容を読み出して表示画面81に表示する。
【0015】
そして、処理用メモリ72・処理用メモリ83・地図データ用メモリ75・画像要素メモリ82をROM、すなわち、読出専用メモリで構成し、また、作業用メモリ73・航跡データ用メモリ74・表示画面用メモリ84をRAM、すなわち、書換読出可能なメモリで構成するとともに、装置の動作電源(図示せず)を遮断した後も、航跡データ用メモリ74の記憶内容を記憶保持用電池77、例えば、長期間にわたって使用可能なリチウム電池、または、ニッケルカドミウム電池などの充電可能な電池によって記憶保持することにより、再度、装置の動作電源を投入したときに、過去の航行関連情報の表示を再現できるように構成してある。
【0016】
図14において、表示画面81は、ラスタ走査による表示面をもつ表示器、例えば、ブラウン管表示器、ドットマトリクス型液晶表示器などの表示画面であり、表示する画像の各図形は次のように生成して表示している。
【0017】
自船航跡CR1の画像は、航跡データ用メモリ74に記憶されている過去の自船位置10aのデータと現在の自船位置10aのデータとの各地点を画像要素メモリ82に記憶された描画用の画像要素により接続して、1つの航跡線の図形にして表示する。なお、過去の航海時における自船航跡CR2を、線の種類を異ならせるか、後記のように、色を異ならせるかして表示することもできる。
【0018】
計画航路RT1の画像は、目的地点JP1までの航路を、複数の方向変更点P1〜P4の地点を画像要素メモリ82に記憶された描画用の画像要素により接続して、一連の折れ線状の航路線L1〜L5の図形にして表示する。
【0019】
また、方向変更点P1〜P4の地点を設定せずに、目的地点JP1のみを設定し、その設定を行った時点での自船位置10aと目的地点JP1とを結ぶ1つの直線のみの図形を表示するように構成することもできる。なお、方向変更点P1〜P4は変針点とも言われている。
【0020】
地図M1の画像は、地図データ用メモリ75に記憶されている細かい間隔の地点を画像要素メモリ82に記憶された描画用の画像要素により接続して、例えば、一連の海岸線の図形にして表示する。なお、地図M1は、船舶用の場合には、海図になるので、所定の海底深度、例えば、100mごとの等深度点を結んだ等深線Ldの図形の画像も表示するようにしている。
【0021】
緯度線LX・経度線LYの画像は、予め定めた条件、または、後記のメニュー画面によって設定した条件による本数と間隔、例えば、緯度線LXを2本、経度線LYを3本、間隔を緯度経度の「′」または「″」の整数値とする条件に従って演算した地点の箇所を画像要素メモリ82に記憶された描画用の画像要素により画面全体にわたる横線と縦線、例えば、実線による横線と縦線とにした図形を表示する。
【0022】
表示画面81上の任意の点CPを指定するための移動可能なカーソルCLX・CLYは、設定操作部分60からの操作入力によって表示画面81上を移動する指定点CPの箇所を描画用の画像要素により画面全体にわたる横線と縦線、例えば、点線による横線と縦線とにした図形を表示する。
【0023】
設定操作部分60は、具体的には、各操作キーを、例えば、操作している間のみ接点が閉じられる接点操作キーで構成してあり、操作した操作キーによる入力を入出力ポート71Bで所定の符号の信号に変換して所定の部分に与えるように構成したものである。
【0024】
そして、各航行関連情報を色分けして表示するようにしたカラー表示の場合には、例えば、図15のように、画面選択操作部分61・目的地等設定操作部分62・航跡設定操作部分63・マーク設定操作部分64・数値等設定操作部分65・画面設定操作部分66・電源等操作部分67・任意方向移動操作部分68などで構成してある。
【0025】
図15において、画面選択操作部分61は、主として、表示画面81に表示する航行関連情報の表示画像の表示形態を選択する操作部分であり、「航跡」キー・「操船」キー・「モニタ」キー・「メニュー」キーなどが設けてある。
【0026】
「航跡」キーは、自船の航跡を主体とする表示状態、例えば、図14の表示状態に選択する操作キーである。「操船」キーは、自船の操船を主体とする表示状態に選択する操作キーである。「モニタ」キーは、航行関連情報を文字のみで表示して監視する状態、すなわち、モニタ状態に選択する操作キーである。「メニュー」キーは、航行関連情報の表示条件のうちの各細部の設定を行うメニュー画面を表示する表示状態に選択する操作キーである。
【0027】
目的地等設定操作部分62は、主として、表示画面81に表示する航行関連情報のうちの目的地などに関連する表示形態を選択する操作部分であり、「目的地」キー・「行先」キー・「ルート」キー・「警報」キーなどが設けてある。
【0028】
「目的地」キーは、航行の終点とする目的地点、例えば、図14の目的地点JP1を設定するとともに設定した目的地に所定の符号、例えば、目的地番号を付して記憶する登録を行う表示状態にする操作キーである。
【0029】
「行先」キーは、「目的地」キーによる操作で登録した目的地のいずれか1つを行先として選択する表示状態にする操作キーである。「ルート」キーは、目的地点までの計画航路、例えば、図14の計画航路RT1、すなわち、ルートの設定を行う表示状態にする操作キーである。
【0030】
「警報」キーは、所定の地点、例えば、図14の目的地点JP1から所定距離の地点に到達したことなどの警報を発生する警報条件の設定を行う表示状態にする操作キーである。
【0031】
航跡設定操作部分63は、主として、表示画面81に表示する航行関連情報のうちの航跡などに関連する表示形態を選択する操作部分であり、「地図」キー・「色」キー・「消去」キー・「接/断」キーなどが設けてある。
【0032】
「地図」キーは、航跡表示の表示状態において、地図の表示・不表示を選択する操作キーである。「色」キーは、航跡の図形、例えば、図14の自船航跡CR1・過去航跡CR2に対する各表示色を選択する操作キーである。
【0033】
なお、表示色の選択は、「色」キーを操作して「色」選択メニューの画面を表示し、「色」選択メニューに表示された各色に対応する数字を、後記の「0」〜「9」の各数字キーで選択するように構成してある。
【0034】
「消去」キーは、航路の画像、例えば、図14の自船航跡CR1・過去航跡CR2の画像を一時的に消去する操作キーである。「接/断」キーは、航跡を画くために、自船位置10aのデータを航跡データ用メモリ74に取り込む間隔の間隔値の選択と、その取り込みをON状態、すなわち、「接」状態と、OFF状態、すなわち、「断」状態とに切り換える操作キーである。
【0035】
なお、「接/断」キーによる「接」状態において、自船位置10aのデータを航跡データ用メモリ74に取り込む間隔の間隔値は、上記の「メニュー」キーによるメニュー画面によって、所定の時間間隔、例えば、「20秒」ごとに取り込むように設定したり、所定の距離間隔、例えば、移動「100m」ごとに取り込むように設定したりすることができる。
【0036】
ここで、航跡表示の表示状態とは、航跡表示を行うことができる表示状態を言うものであって、上記のように、航跡の画像を消去している表示状態を含むものである。
【0037】
マーク設定操作部分64は、主として、航跡表示の表示状態において、航行関連情報に付随する各所定の地点、例えば、図14の自船位置10a、目的地点JP1、留意すべき事項、例えば、漁撈などを行った留意地点EV1・EV2などを表示するマークの図形と色とを選択する操作部分であり、「色」キー・「○」キー・「△」キー・「□」キーなどが設けてある。
【0038】
「色」キーは、各マーク図形をさらに複数に区別するための各表示色を選択すする操作を行う操作キーであって、各表示色の選択は、航跡設定操作部分63における「色」選択と同様の操作によって選択する。「○」キー・「△」キー・「□」キーは、このうちのいずれかのキーを操作することよって、操作したキーの図形をマークとして選択する。
【0039】
なお、これらのマークは、表示する画像の「拡大」「縮小」には無関係に常に一定の大きさで表示するようにしている。また、上記の留意すべき事項、例えば、漁撈などを行った地点EV1・EV2などを表示するマークをイベントマークと言っている。
【0040】
数値等設定操作部分65は、主として、メニュー画面の表示状態において、所要の数値を入力し、または、所要の項目、例えば、「色」の種類などを選択する操作を行う操作部分であり、「0」〜「9」の各数字キー・「+」「−」の各符号キーなどが設けてある。
【0041】
画面設定操作部分66は、主として、航跡表示の表示状態において、画面の尺度の変更、画面の移動などの操作を行う操作部分であり、「中央」キー・「↑」キー・「↓」キー・「→」キー・「←」キー・「拡大」キー・「縮小」キーなどが設けてある。
【0042】
「中央」キーは、自船位置10aを表示画面81の画面の中央に位置付けた表示状態にする操作キーである。「拡大」キー、すなわち、4つの斜め外側に向いている矢印を付した操作キーは、表示している画面をズーム状に拡大する操作キーである。「縮小」キー、すなわち、4つの斜め内側に向いている矢印を付した操作キーは、表示している画面をズーム状に縮小する操作キーである。
【0043】
「↑」キー・「↓」キー・「→」キー・「←」キーは、後記の「カーソル」キーによってカーソルを表示させているときは、カーソルCLX・CLYの交点、すなわち、指定点CPを矢印方向に相当する上方向・下方向・左方向・右方向のいずれかに移動する操作キーとして動作し、カーソルを表示していないときは、画面全体を矢印方向に相当する上方向・下方向・左方向・右方向のいずれかに移動する操作キーとして動作する。
【0044】
電源等操作部分67は、主として、装置の電源のON−OFFと、表示画面81の輝度の調整とを行う操作部分であり、「電源」キー・「輝度」キーなどが設けてある。
【0045】
「電源」キー67Aは、装置の電源をON−OFF、すなわち、投入または遮断する操作を行う操作キーである。「輝度」キーは、表示画面の輝度を変更する操作を行う操作キーである。そして、電源の投入・遮断を行う部分は、図13のように、船内電源50から、自己保持回路55を介して、装置各部に所要の電圧を与えるための内部電源部分52に供給するようにしてある。
【0046】
自己保持回路55は、図15の電源キー67Aを操作する度ごとに、投入側と遮断側とに交互に切り替えて保持するとともに、船内電源50自体が遮断されたときは、自動的に遮断側にリセットされるように構成した回路、例えば、J−Kフリップフロップ回路と継電器との組合回路である。したがって、記憶保持用電池77として、充電可能な電池を用いている場合には、電源が投入されている間だけ充電状態になっている。
【0047】
任意方向移動操作部分68は、表示している画面全体またはカーソルCLX・CLYを任意の方向に移動する操作を行う操作部分であって、例えば、トラックボール、ジョイスティックなどで構成してある。
【0048】
そして、後記の「カーソル」キーによってカーソルを表示させているときは、カーソルCLX・CLYの交点、すなわち、指定点CPを任意の方向に移動する操作キーとして動作し、カーソルを表示していないときは、画面全体を任意の方向に移動する操作キーとして動作する。
【0049】
カーソル等設定操作部分69は、主として、カーソルの表示・不表示と、表示画面の向きと、選択または入力した条件・数値の決定または取消などの操作を行う操作部分であり、「カーソル」キー・「航法切換」キー・「決定」キー・「取消」キーなどが設けてある。
【0050】
「カーソル」キーは、キー操作する度ごとに、カーソルCLX・CLYを表示状態と、不表示状態とに切り換える操作キーである。「航法切換」キーは、キー操作する度ごとに、表示画面81の真上方向を「北方向」として表示画像を表示する「北方向表示」と、表示画面81の真上方向を「船首方向」として表示画像を表示する「船首方向表示」と、表示画面81の真上方向を「目的地点JP1の方向」として表示画像を表示する「目的地点方向表示」とに切り換える操作キーである。
【0051】
「決定」キーは、他の操作キーを操作して選択または入力した条件・数値により動作させることを「決定」する操作キーである。「取消」キーは、上記の条件・数値を取り消す操作キーである。
【0052】
上記の図13〜図15の構成において、必要に応じて、外部記憶部分90とその入出力ポート91とを設けて所要のデータを外部から装置内部に取り込んで記憶し、または、装置内部のデータを外部記憶部分90、例えば、ICカードに記憶させて保存する構成(以下、第4従来という)が周知である。
【0053】
そして、前者の構成の場合には、例えば、地図データ用メモリ75を除去して、外部記憶部分90を予め地図データを記憶したICカードにして構成するとともに、入出力ポート91にICカードの記憶読取機能を設けて構成することにより、地図データを外部記憶部分90から読み取って表示するように構成している。
【0054】
また、後者の構成の場合には、例えば、外部記憶部分90を航跡表示状態における表示画面81の表示データを記憶するICカードにして構成するとともに、入出力ポート91にICカードの記憶書込・読出機能を設けて構成することにより、過去の航跡表示状態における航行関連情報を保存するとともに、必要に応じて、過去の航跡表示状態を再現表示するように構成している。
【0055】
上記の図14の構成では、計画航路RT1に対する自船の操船状態を進路ずれθ1で表示しているが、こうした進路ずれの表示に代えて、図16のように、計画航路RT1を中心にした所定の距離幅B1、例えば、左右各100mの幅の部分を所定の航路範囲としておき、自船位置10aが距離幅B1を越えた距離幅B1aを進路ずれ量として表示する構成(以下、第5従来技術という)が周知である。
【0056】
〔画面移行復帰表示動作〕
上記のような航法装置100において、表示画面81に自船位置10aの地点を含む表示状態から、尺度を拡大または縮小して、他の地点、例えば、目的地点JP1を含む表示状態に移行した後に、再び、自船位置10aを含む表示状態に移行させる動作(以下、画面移行復帰表示動作という)は、次のように動作させる構成(以下、第6従来技術という)になっている。
【0057】
まず、図14の表示状態において、カーソルが表示されていないときは、「カーソル」キーを操作してカーソルCLX・CLYを表示状態にし、「↑」キー・「↓」キー・「→」キー・「←」キーのうちの所要の操作キー、または、任意方向移動操作部分68を操作して、カーソルCLX・CLYの交点、すなわち、指定点CPを目的地点JP1に一致させた後に、「中央」キーを操作すると、表示の尺度が図14の尺度、例えば、縮尺1/10000のままで、目的地点JP1が表示画面81の中央位置に位置付けられた表示状態に移行する。
【0058】
次いで、「拡大」キーまたは「縮小」キーのうちの所要の操作キー、この場合は、「拡大」キーを操作して、所要の尺度、例えば、縮尺1/4000に拡大することにより、目的とする表示状態、例えば、図17の表示状態にする。
【0059】
図17の状態では、目的地点JP1の付近を拡大した拡大表示状態になるので、目的地点JP1付近の領域における航行関連情報を綿密に判断することができる。また、上記の尺度の変更の際に、「縮小」キーを操作して、縮小表示状態にした場合には、目的地点JP1を中心とする広い領域における航行関連情報を大略的に判断して航行計画に役立てることができる。
【0060】
しかし、上記の拡大表示状態では、殆どの場合、自船位置10aの地点が含まれないか、または、自船位置10aの地点が表示画面81の隅部分の近くに位置付けられてしまうため、自船の付近の航行関連情報を知ることができないので、図17での表示状態による目的作業が済んだ後は、再び、図14のように、自船位置10aの地点を含む表示状態に戻す必要がある。
【0061】
そこで、まず、「中央」キーを操作すると、図18のように、尺度が縮尺1/4000のままで、自船位置10aが表示画面81の中央位置に位置付けられた状態になるので、次いで、「縮小」キーを操作して、元の尺度、例えば、縮尺1/10000による表示状態に戻している。
【0062】
また、上記の縮小表示状態では、自船位置10aの付近が小さくなり過ぎて、航行状態を明確に判断し得ないので、「中央」キーを操作して、自船位置10aを表示画面81の中央位置に位置付けた後に、「拡大」キーを操作して元の尺度による表示状態に戻している。
【0063】
なお、カーソルCLX・CLYの指定点CPを表示画面81の外側に移動させるように操作することによって、表示画面81に表示されていない外側の地点を指定して画面移行復帰表示動作を行わせることができる。また、表示の尺度は、縮尺に代えて、表示画面81横方向または縦方向の幅に対応する距離値、例えば、「浬」で表した距離値を用いることができる。
【発明の開示】
【発明が解決しようとする課題】
【0064】
〔第1の課題〕
上記の第6従来技術による画面移行復帰表示動作の構成では、「中央」キーを操作した後に、「縮小」キー、または、「拡大」キーを操作して、元の尺度に戻しているので、操作が複雑な上に、時間がかかるという不都合がある。
【0065】
〔第2の課題〕
上記の第1従来技術〜第6従来技術における○マーク・△マーク・□マークなどのマーク表示の構成では、マークを大きくして見易くすると、そのマークによって指示する地点の位置が漠然としたものになってしまうので、マークをなるべく小さくして指示する地点の位置を明確に判別できるようにしているため、目的とするマークの箇所が見ずらく、うっかりすると、マークの箇所を見逃してしまうという不都合がある。
【0066】
〔第3の課題〕
上記の第1従来技術〜第6従来技術における記憶部分の構成では、作業用メモリ73のうちの所要の記憶部分、航跡データ用メモリ74の記憶部分などを記憶保持用電池77で記憶保持しているが、船舶の停泊が長期にわたるときなどには、その間、船内電源50が遮断された状態になり、記憶保持用電池77の蓄電量が低下して、記憶内容が消失するという不都合がある。
【0067】
こうした不都合を解決するために、これらの記憶部分を、電気的に書換可能で電気不要で記憶保持する記憶部分、例えば、フラッシュメモリに変更して構成することが考えられるが、こうした構成では、記憶内容の書換に時間を要するので、航行関連情報の処理動作が遅れてしまい、目的とする表示を行い得なくなるという不都合が生ずる。
【0068】
また、UPS(Uninterruptible Power Supply=無停電電源)を設けたのでは、装置構成が大きくなり、簡便安価な構成にして提供し得ないという不都合が生ずる。
【0069】
〔第4の課題〕
上記の第1従来技術〜第6従来技術におけるカーソルCLX・CLYの構成では、表示画面81の全体にわたる横方向線のカーソルCLXと縦方向線のカーソルCLYとしてあるため、指定すべき地点に指定点CPに一致させる際には、いずれか一方のカーソル線を一致させた後に他方のカーソル線を一致させることで、容易に一致させ得るという利点がある。
【0070】
しかし、カーソルCLX・CLYが表示画面の全体にわたる線になっているので、各航行関連情報の画像の監視には邪魔になるため、用済み後は、その都度、消去しなければならないという不都合がある。
【0071】
さらには、1つの地点を指定した直後に、別の地点を指定する必要が生じた場合には、一旦、消去したカーソルCLX・CLYを、再度、表示する操作を行わなければならないという不都合がある。
【0072】
こうした不都合を解決するために、カーソルCLX・CLYを小さい十文字状の図形によるカーソルに変更した構成のものが周知である。しかし、こうしたカーソルでは、横方向線のカーソルCLXと縦方向線のカーソルCLYのように、いずれか一方のカーソル線を一致させた後に他方のカーソル線を一致させるという操作が行い得ないので、希望する地点にカーソルを一致させるのに、それなりの時間を要するという不都合が生ずる。
【0073】
〔第5の課題〕
上記の第1従来技術〜第6従来技術における記憶部分の構成では、自船位置10aのデータを航跡データ用メモリ74に取り込む間隔を、所定の時間間隔と所定の距離間隔とのうちのいずれかに選択して使用できるようにしてある。
【0074】
しかし、時間間隔を選択して使用しているときには、自船位置10aが殆ど変化していないのに、多くの自船位置10aのデータを航跡データ用メモリ74に取り込んでしまい、航跡データ用メモリ74の記憶内容に無駄が生ずる。
【0075】
また、距離間隔を選択して使用しているときには、ほぼ直線方向に航行しているのに、多くの中間地点における自船位置10aのデータを航跡データ用メモリ74に取り込んでしまい、航跡データ用メモリ74の記憶内容に無駄が生ずるという不都合がある。
このためこうした不都合のない航法装置の提供が望まれているという課題がある。
【課題を解決するための手段】
【0076】
この発明は、上記の〔第1の課題〕に対しては、上記のような
自船位置の地点を含む航行関連情報の画像を所定の尺度で表示する第1の表示状態から、上記の自船位置から離れた他の地点を含む航行関連情報の画像を上記の尺度を他の尺度に変更して表示する第2の表示状態に変更して表示し得るようにした航法装置において、
【0077】
上記の他の地点と上記の変更する尺度とを指定する操作を行うことにより、上記の第1の表示状態の画像における所定の位置の地点と上記の所定の尺度とを記憶するとともに、上記の第1の表示状態から上記の第2の表示状態に移行する第1の表示移行手段と、
【0078】
単一の操作により上記の記憶を読み出して上記の第2の表示状態から上記の第1の表示状態に移行する第2の表示移行手段とを設ける第1の構成と、
【0079】
この第1の構成において、
上記の所定の位置の地点を、上記の第1の表示状態の画像の中央位置の地点、上記の第1の表示状態の画像の四隅点のうちの任意の地点、上記の自船位置の地点のうちのいずれか1つまたは複数とした第2の構成と、
【0080】
上記の第1の構成または第2の構成において、
各上記の尺度を上記の表示を行う表示画面の横方向または縦方向の幅に対応する距離値もしくは縮尺率とした第3の構成とにより解決したものである。
【0081】
上記の〔第2の課題〕に対しては、
自船位置の地点を含む航行関連情報の画像を所定の尺度で表示する表示、または、上記の自船位置から離れた他の地点を含む航行関連情報の画像を上記の尺度を他の尺度に変更して表示する表示を行い得るようにした航法装置において、
【0082】
各上記の航行関連情報に付随する各所定の地点を大略的に識別するための上記の各所定の地点を囲む図形を表示するとともに、上記の図形の中の上記の各所定の地点の真の位置を指示するための図形を表示する地点識別図形表示手段を設ける第4の構成と、
【0083】
この第4の構成において、
上記の地点を囲む図形を円形または多角形による第1の図形とし、上記の真の位置を指示するための図形を上記の第1の図形よりも小さい点状または十文字状の第2の図形とした第5の構成とにより解決したものである。
【0084】
上記の〔第3の課題〕に対しては、
上記の第4の構成における航法装置と同様の航法装置において、
各上記の関連情報のうちの所定の情報を記憶するための記憶部分として、上記の記憶を電気的に書換可能で電気的に記憶保持する揮発性記憶部分と、上記の記憶を電気的に書換可能で電気不要で記憶保持する不揮発性記憶部分とを設ける記憶部併設手段と、
【0085】
装置の動作電源が投入されたときのみ、上記の不揮発性記憶部分と上記の揮発性記憶部分との対応する記憶内容を同一にするための処理を行う記憶同一化処理手段とを設ける第6の構成と、
【0086】
この第6の構成において、
上記の揮発性記憶部分をスタテイックRAMと記憶保持用電池とで構成し、上記の不揮発性記憶部分をフラッシュメモリで構成した第7の構成とにより解決したものである。
【0087】
上記の〔第4の課題〕に対しては、
上記の第4の構成における航法装置と同様の航法装置において、
各上記の表示状態の表示を行う画面における任意の点を指定するために、上記の画面の中を移動可能で上記の任意の点を通るカーソルを表示するカーソル表示手段と、
【0088】
上記のカーソルの移動中は上記のカーソルを上記の画面の横方向全体にわたる横線と上記の画面の縦方向全体にわたる縦線とによる大形のカーソルにより表示し、上記のカーソルの停止中は上記のカーソルを上記の任意の点の部分のみ指示する小形のカーソルにより表示する大小カーソル表示手段とを設ける第8の構成と、
【0089】
この第8の構成において、
上記の大形のカーソルの上記の横線と上記の縦線とを点線または実線で表示し、上記の小形のカーソルを縦横1cm程度の十文字状の図形で表示した第9の構成とにより解決したものである。
【0090】
上記の〔第5の課題〕に対しては、
上記の第4の構成における航法装置と同様の航法装置において、
上記の自船位置の位置値を取り込んで記憶した記憶内容にもとづいて自船の航跡を表示する航跡表示手段と、
【0091】
自船速度が、所定値に達しているときは所定の時間間隔ごとに取り込んで上記の記憶を行い、上記の所定値に満たないときは所定の距離間隔ごとに取り込んで上記の記憶を行う取込記憶手段とを設ける第10の構成と、
【0092】
この第10の構成において、
上記の自船速度として、上記の自船位置を測定する位置測定部分により得られる自船速度を用いる第11の構成と
上記の所定値の判別をヒステリヒス動作により行う第12の構成とにより解決したものである。
【発明の効果】
【0093】
この発明によれば以上のように、第1には、移動前の画像における所定位置と尺度を記憶することによって単一の操作のみで元の表示状態に戻すことができ、第2には、マークを付す地点を囲む図形の中にその地点の真の位置を指示する図形を表示することによってマークを大きく判別し易いものにすることができる。
【0094】
また、第3には、航行関連情報のうちの所定の情報を電気的に書換可能で電気的に記憶保持する記憶部分と電気的に書換可能で電気不要で記憶保持する記憶部分とに記憶するとともに装置の電源を投入したときのみ双方の記憶内容を同一化する書換動作を行うことによって無停電電源などの大形の構成を設けることなく記憶内容を保全できる。
【0095】
さらに、第4には、移動中は大形のカーソルを表示し、停止中は小形のカーソルを表示することによって画像を見易いものにすることができ、第5には、航跡を表示するための位置の取込記憶を自船速度が所定値以上のときは時間間隔で行い、所定値未満のときは距離間隔で行う自動間隔にすることによって無駄な位置の取込記憶を無くすることができるなどの特長をもつ航法装置を提供し得るという効果がある。
【発明を実施するための最良の形態】
【0096】
この発明の実施の形態として、上記の第1従来技術〜第6従来技術の構成にこの発明を適用した実施を説明する。
【実施例】
【0097】
〔第1実施例〕
以下、図1〜図5により第1実施例を説明する。この第1実施例の構成が上記の第1従来技術〜第6従来技術の構成と異なる箇所は次の箇所である。
【0098】
第1には、図1の〔ブロック構成〕と図2とにおいて、電源スイッチ67Bの箇所を、図13の〔ブロック構成〕と図15の「電源」キー・入出力ポート71B・自己保持回路51のような保持構成を介さないで、独立した単なる投入・遮断型のスイッチ、すなわち、ON−OFFスイッチに変更して構成した箇所である。
【0099】
そして、一般に、船内電源50には、航法装置100を含む複数の装置に電源供給するための基幹電源スイッチ51が設けてあるため、これら複数の装置の個々の電源スイッチを操作するのは、手数がかかり、面倒なので、個々の装置における電源スイッチ、例えば、電源スイッチ67Bなどは投入状態のままにしておき、基幹電源スイッチ51を遮断することによって、複数の装置の電源供給を同時に遮断するように構成している。
【0100】
第2には、図2の設定操作部分60において、図15の設定操作部分60を次のように変更して構成した箇所である。つまり、図15の画面選択操作部分61における「メニュー」キーのみを図2の目的地等設定操作部分62Xに配置し、他のキーによる操作は「メニュー」キー62Aによるメニュー画面で選択操作するように変更してある。
【0101】
図15の目的地等設定操作部分62における「目的地」キーによる操作のみを図2の目的地等設定操作部分62Xに配置し、他のキーによる操作は「メニュー」キー62Aによるメニュー画面で選択操作するように変更し、図15の数値等設定操作部分65における操作は全て「メニュー」キー62Aによるメニュー画面で選択操作するように変更してある。
【0102】
図15の画面設定操作部分66を、図2の画面設定操作部分66Xのように、図15の「↑」キー・「↓」キー・「→」キー・「←」による移動操作を除去して、図15と同様の「拡大」キー66D・「中央」キー66E・「縮小」キー66Fに加えて、新たに、「縮尺1」キー66A・「縮尺2」キー66B・「縮尺3」キー66Cを設けるように変更してある。
【0103】
なお、「縮尺1」キー66A・「縮尺2」キー66B・「縮尺3」キー66Cによる尺度は、予め、「メニュー」キー62Aによるメニュー画面で設定できるように構成してある。
【0104】
図15の航跡設定操作部分63を、図2の航跡設定操作部分63Xのように、図15の「地図」キーによる操作を「メニュー」キー62Aによるメニュー画面で選択操作するように変更するとともに、「色」キーとメニュー画面による選択を図2の「航跡色」切換スイッチ63Aで直接的に選択できるように変更してある。
【0105】
さらに、図15と同様の航跡の「接/断」キー63D・「航跡消去」キー63Fに加えて、図2の「記憶」キー63B・「呼出」キー63Cにより、その回における航跡に符号を付して記憶する操作と、記憶した航跡を呼出す操作とを、直接的に、メニューを表示して簡便な操作で行えるように変更してある。
【0106】
図15のマーク設定操作部分64を、図2のマーク設定操作部分64Xのように、図15のと同様の「○」キー64B・「□」キー64Cに加えて「×」キー64Eを配置し、また、図15の「△」キーを逆の三角形図形にした「▽」キー64Fを配置するとともに、「色」キーとメニュー画面による選択を図2の「マーク」切換スイッチ64Aで直接的に選択できるように変更し、さらには、「マーク消去」64Fを配置して、指定したマークを消去できるように変更してある。
【0107】
なお、「×」キー64Eは図形の交差点の位置がマークを設定した位置として明確に表示できる利点があり、また、「▽」キー66Fは、図形の上の辺が長くなっているため、視覚的に「△」よりも強い印象を与えるので、見分け易いという利点がある。
【0108】
また、図2の目的地等設定操作部分62Xには、上記の「メニュー」キー62A・「目的地」キー62B・「カーソル」キー62Hと、図15と同様の「取消」キー62D・「決定」キー62F・「航法切換」キー62Gに加えて、「走錨」キー62C・「復帰」キー62J・「解除」キー62Eを追加してある。
【0109】
「走錨」キー62Cは、自船が錨を下ろした地点の自船位置10aを記憶しておき、自船が、波浪・潮流などにより、その地点から移動した距離・方向などを表示するのに用い、「復帰」キー62Jは、表示画面81に表示している画面を移動操作した後に、元の位置での表示状態に復帰させるのに用い、「解除」キー62Eは、メニュー画面・目的地・走錨の表示・設定などを解除するのに用いる。
【0110】
なお、図2の任意方向移動操作部分68は、ジョイスティク型の操作器で構成してあり、画面やカーソルの移動操作やメニュー画面における選択操作は、全て任意方向移動操作部分68によって行うように変更してある。
【0111】
第3には、図1の〔ブロック構成〕と図3とにおいて、各記憶部分の構成を次のように変更して構成した箇所である。つまり、図13の〔ブロック構成〕における作業用メモリ73を、2つの作業用メモリ(1)73A・作業用メモリ(2)73Bにしてある。
【0112】
そして、作業用メモリ(1)73Aは、記憶保持用電池77では記憶保持できないメモリ、例えば、ダイナミックRAMで構成し、作業用メモリ(2)73Bは、作業用メモリ73と同様に、記憶保持用電池77で記憶保持できるメモリ、すなわち、電気的に書換可能で電気的に記憶保持する揮発性記憶部分、例えば、スタティクRAMで構成してある。
【0113】
作業用メモリ(1)73Aに記憶する記憶内容は、図3のように、現在位置データ・現在速度データ・現在進行方向データ、すなわち、現在の自船位置10a自船速度10b・現在進行方向10cのデータと、その他の演算処理関連データ、すなわち、処理用メモリ72に記憶した制御処理フローのプログラムによる演算処理などの過程において一時的に記憶しておくデータなどの一時的な記憶を要するデータである。
【0114】
作業用メモリ(2)73Bは、図3のように、種々の表示条件に関連するデータを記憶しておく表示条件データ記憶領域73B1と、マークの表示のみに関連するデータを記憶しておくマーク関連データ記憶領域73B2と、航跡の表示のみに関連するデータを記憶しておく航跡関連データ記憶領域73B3とに区分してある。
【0115】
表示条件データ記憶領域73B1には、例えば、「輝度」キー67Cによって設定した輝度データと、「縮尺1」キー66A・「縮尺2」キー66B・「縮尺3」66C・「拡大」キー66D・「縮小」キー66Eのいずれかよって設定した尺度のデータと、
【0116】
「メニュー」キー62Aによって設定した「縮尺1」キー66A・「縮尺2」キー66B・「縮尺3」66Cの尺度のデータと、「目的地」キー62Bによって設定した目的地JP1の地点の位置値のデータと、「走錨」キー62Cによって設定した錨を下ろした地点の位置値のデータと、
【0117】
「カーソル」キー62Hによって表示したカーソルの交点、すなわち、指定点CPの地点の位置値と、「カーソル図形」、すなわち、後記の大カーソルCLX・CLYと小カーソルCLZの図形のデータと、航跡の「接/断」キー63Dの操作によって設定した航跡「接」状態、または、航跡「断」状態を表すデータと、
【0118】
航跡を表示するために用いる位置値のデータを取り込む際に用いる「時間間隔」と「距離間隔」のデータと、「復帰」キー62Jを操作したときに復帰すべき位置と尺度のデータと、その他の表示条件に関連するデータ、例えば、「航法切換」キー62Gによって設定した航法の種別のデータなどを記憶するように構成してある。
【0119】
マーク関連データ記憶領域73B2には、例えば、マーク設定操作部分64Xにおける「マーク色」スイッチ64Aで選択した「色」のデータと、「○」キー64B・「□」キー64C・「▽」キー64D・「×」キー64Eのいずれかを操作して設定されるマークの形状と、その地点とのデータとを、設定された順に順次にマーク番号のデータを付して記憶するように構成してある。
【0120】
航跡関連データ記憶領域73B3には、航跡設定操作部分63Xにおける航跡の「接/断」キー63Dを操作して「接」状態にしたときの「時間間隔」または「距離間隔」によって取り込まれた自船位置10aの「地点」データ、例えば、緯度経度値と、
【0121】
その地点データが航跡の継続点に該当するか否かを定める「属性」データと、航跡設定操作部分63Xの「航跡色」スイッチ63Aによって設定した「色」のデータと、その「地点」のデータとを、航跡データとして、順次に、記憶するように構成してある。
【0122】
第4には、新たに、図1の〔ブロック構成〕において、保持用メモリ70Xを追加し、この保持用メモリ70Xを、記憶保持用電池77のような電源を与えなくなくても記憶内容を保持できるメモリ、すなわち、電気的に書換可能で電気不要で記憶保持する記憶部分、例えば、フラッシュメモリで構成している。
【0123】
そして、保持用メモリ70Xには、表示条件データ記憶領域70X1・マーク関連データ記憶領域70X2・航跡関連データ記憶領域70X3・地図データ記憶領域70X4を設けてある。
【0124】
表示条件データ記憶領域70X1・マーク関連データ記憶領域70X2・航跡関連データ記憶領域70X3には、図3の作業用メモリ(2)73Bにおける表示条件データ記憶領域73B1・マーク関連データ記憶領域73B2・航跡関連データ記憶領域73B3の記憶内容を保存し、地図データ記憶領域70X4には、図13の〔ブロック構成〕における地図データ用メモリ75に代えて、地図データを記憶保存している。
【0125】
第5には、処理用メモリ72に、図4の制御処理フローによるプログラム、または、図5の制御処理フローによるプログラムを記憶させて、表示の制御処理を行うことにより、上記の〔第1の課題〕を解決するようにした箇所である。
【0126】
以下、図4の制御処理フローを説明する。図4の制御処理フローは、航行情報処理部分70における主要な制御処理を行うためのメイン制御処理ルーチンのサブルーチンとして構成してあり、例えば、1秒ごとに、図4の制御処理フローに移行してくるように構成してある。
【0127】
〔図4の制御処理フローの説明〕
◆ステップSP1では、「移動」操作が行われたか否かを判別する。「移動」操作が行われたときは次のステップSP2に移行し、そうでないときはメイン制御処理ルーチンの所定のステップ箇所に戻る。
【0128】
ここでの判別は、任意方向移動操作部分68によって、カーソルCLX・CLYの交点、すなわち、指定点CPを移動する移動操作、または、画面を移動する移動操作を行った入力のデータがあるか否かによって判別する。なお、必要に応じて、後記のステップSP3での判別を容易にするためのフラグ、例えば、「F1」を記憶する。
【0129】
◆ステップSP2では、「復帰」のために用いるデータとして、移動操作を行う直前の表示画面81に表示している画像の尺度の値と、画像の所定の位置の地点、例えば、図14の画像の中央位置P10の地点の位置値とのデータを取り込んで、作業用メモリー(2)73Bに「復帰」データとして記憶した後に、ステップSP4に移行する。以前の「復帰」データが記憶されているときは、それを新しい「復帰」データに書き換える。
【0130】
◆ステップSP3では、上記のステップSP1で説明した移動操作が、再度、行われたか否かを判別する。ここでの判別は、上記のステップSP1と同様に行うが、必要に応じて、上記のフラグ「F1」の有無を判別する。
◆ステップSP4では、上記の移動操作に対応した移動処理を行った後に、次のステップSP5に移行する。
【0131】
◆ステップSP5では、「拡大」操作または「縮小」操作が行われたか否かを判別する。「拡大」操作または「縮小」操作が行われたときは次のステップSP6に移行し、そうでないときはステップSP7に移行する。
【0132】
ここでの判別は、「縮尺1」キー66A・「縮尺2」キー66B・「縮尺3」キー66C・「拡大」キー66D・「縮小」キー66Fによって、画面を拡大または縮小する「拡大」「縮小」操作を行った入力のデータがあるか否かによって判別する。
◆ステップSP6では、上記の「拡大」「縮小」操作に対応した「拡大」「縮小」処理を行った後に、次のステップSP7に移行する。
【0133】
◆ステップSP7では、「復帰」操作が行われたか否かを判別する。「復帰」操作が行われたときは次のステップSP8に移行し、そうでないときはステップSP3に戻る。
ここでの判別は、「復帰」キー62Jよって、画面を元の表示状態に戻すための「復帰」操作を行った入力のデータがあるか否かによって判別する。
【0134】
◆ステップSP8では、上記のステップSP2で記憶した「復帰」データを読み出した後に、次のステップSP9に移行する。
◆ステップSP9では、「復帰」データにもとづいて、ステップSP1での移動操作以前における画面を再生表示する処理を行った後に、メイン制御処理ルーチンの所定のステップ箇所に戻る。
【0135】
なお、上記のステップSP2において「復帰」データとして記憶する移動操作の直前における「画像の所定の位置の地点」としては、上記の「画像の中央位置の地点」、例えば、図14の中央位置P10の地点と、「画像の四隅点のうちの任意の地点」、例えば、図14の四隅点P11〜P14のうちの任意の地点と、「自船位置の地点」、例えば、図14の自船位置10aの地点とのうちのいずか1つまたは複数を記憶するように構成すれば、その地点を表示基準点として、元の画像状態、または、自船位置10aを中央にした元の尺度の画像状態に戻すことができるわけである。
【0136】
また、上記のステップSP2において「復帰」データとして記憶する移動操作の直前における「画像の尺度」としては、例えば、図14の表示画面81の「横方向または縦方向の幅BBまたはHBに対応する距離値」もしくは「縮尺率」を記憶するように構成すれば、その「距離値」または「縮尺率」によって、元の尺度の画像状態に戻すことができるわけである。
【0137】
なお、上記のステップSP6の「拡大」「縮小」処理を行わずに、「復帰」キー62Jが操作されたときも、記憶された「復帰」データによって、同様に、元の画像状態に戻すことができるわけである。
【0138】
したがって、元の位置に戻す操作を行った後に、元の尺度に戻すという複雑な操作を行わずに、元の元の画像状態、または、自船位置10aを中央にした元の尺度の画像状態に戻し得るので、上記の〔第1の課題〕を解決し得たことになる。
【0139】
上記の図4の制御処理フローでは、「復帰」キー62Jを用いるように構成してあるが、「復帰」キー62Jを設けずに、「カーソル」キー62H、「中央」キー66Dを併用して、上記と同様の「復帰」動作を行わせることができる。
【0140】
そして、前者の「カーソル」キー62Hを用いる場合には、後記の図5の制御処理フローのように、「復帰」表示処理と同時にカーソルCLX・CLYの消去を行わせることができ、後者の「中央」キーを用いる場合には、上記の記憶する「画像の所定の位置の地点」を「画像の中央位置の地点」として場合と同様の動作を行わせることができる。
【0141】
以下、図5の制御処理フローを説明する。図5の制御処理フローは、航行情報処理部分70における主要な制御処理を行うためのメイン制御処理ルーチンのカーソルの「表示」状態に付随するサブルーチンとして構成してあり、カーソルCLX・CLYが表示されている状態のときに、例えば、1秒ごとに、図5の制御処理フローに移行してくるように構成してある。
【0142】
〔図5の制御処理フローの説明〕
図5の制御処理フローが、図4の制御処理フローと異なる箇所は、ステップSP1・ステップSP3・ステップSP7・ステップSP10の箇所のみなので、ここでは、これらのステップのみについて説明する。
【0143】
◆ステップSP1が、図4のステップSP1と異なる箇所は、判別する対象を、カーソルCLX・CLYの交点、すなわち、指定点CPを移動する移動操作が行われたか否かを判別するように変更した箇所である。
【0144】
◆ステップSP3が、図4のステップSP3と異なる箇所は、判別する対象を、カーソルCLX・CLYの交点、すなわち、指定点CPを、再度、移動する移動操作が行われたか否かを判別するように変更した箇所である。
【0145】
◆ステップSP7が、図4のステップSP7と異なる箇所は、カーソルCLX・CLYを消去する「カーソル消去」操作が行われたか否かを判別し、「カーソル消去」操作が行われたときは次のステップSP8に移行し、そうでないときはステップSP3に戻るように変更した箇所である。
【0146】
ここでの判別は、「カーソル」キー62Hを操作して、カーソルCLX・CLYを消去するための「カーソル消去」操作を行った入力のデータがあるか否かによって判別する。
【0147】
なお、この構成の場合には、カーソルCLX・CLYを表示している状態においては、移動の有無にかかわらず、「カーソル」キー62Hを操作するとカーソルCLX・CLYを消去するように構成してある。
したがって、「カーソル消去」と上記の〔第1の課題〕の解決とを同時に行わせることができるわけである。
【0148】
つまり、この第1実施例の構成は、概括的には、第1には、上記のような
自船位置10aの地点を含む航行関連情報の画像を所定の尺度、例えば、縮尺1/10000で表示する第1の表示状態、例えば、図14のような表示状態から、上記の自船位置10aから離れた他の地点、例えば、目的地点JP1を含む航行関連情報の画像を上記の尺度1/10000を他の尺度、例えば、1/400に変更して表示する第2の表示状態、例えば、図17のような表示状態に変更して表示し得るようにした航法装置100において、
【0149】
上記の他の地点、例えば、目的地点JP1と、上記の変更する尺度、例えば、1/400とを指定する操作を行うことにより、上記の第1の表示状態の画像、例えば、図14のような表示状態の画像における所定の位置の地点、例えば、画像の中央位置の中央と、上記の所定の尺度、例えば、1/10000とを記憶するとともに、上記の第1の表示状態、例えば、図14のような表示状態から、上記の第2の表示状態、例えば、図17のような表示状態に移行する第1の表示移行手段と、
【0150】
単一の操作、例えば、「復帰」キー62J、「カーソル」キー62H、「中央」66Eなどのうちのいずれか1つのキーを単に操作することにより上記の記憶を読み出して、上記の第2の表示状態、例えば、図17のような表示状態から、上記の第2の表示状態、例えば、図14のような表示状態に移行する第2の表示移行手段とを設けた上記の第1の構成を構成しているものである。
【0151】
また、第2には、上記の第1の構成において、
上記の所定の位置の地点を、上記の第1の表示状態、例えば、図14のような表示状態の画像の中央位置P10の地点、上記の第1の表示状態、例えば、図14のような表示状態の画像の四隅点P11〜P14のうちの任意の地点、上記の自船位置10aの地点のうちのいずか1つまたは複数とした上記の第2の構成を構成しているものである。
【0152】
さらに、第3には、上記の第1の構成または第2の構成において、
各上記の尺度を上記の表示を行う表示画面、例えば、図14の表示画面81の横方向または縦方向の幅BBまたはHBに対応する距離値もしくは縮尺率とした上記の第3の構成を構成しているものである。
そして、これらの第1の構成〜第3の構成によれば、上記のように、上記の〔第1の課題〕を解決しているものである。
【0153】
〔第2実施例〕
以下、図1〜図3・図6・図7により第2実施例を説明する。この第2実施例の構成は、上記の第1実施例における図1〜図3の構成において、図6・図7のマーク構成を設けた構成であり、各マークの中に位置付けられている各所定の地点の真の位置を指示するための図形を追加することよって、上記の〔第2の課題〕を解決し得るようにしたものである。
【0154】
図6において、〔円形マーク〕〔四角形マーク〕〔三角形マーク〕の各図形は、マークを付して表示する各所定の地点、例えば、図7の自船位置10a・目的地点JP1・留意地点EV1・留意地点EV2などを識別するために、概略位置図形64Xと、真位置図形64Y1・64Y2とによって表示するように構成してある。
【0155】
そして、概略位置図形64Xは、これらの地点を大略的に識別するために、これらの地点を囲む円形・四角形・逆三角形などの図形にしてあり、また、真位置図形64Y1・64Y2は、概略位置図形64Xの中のこれらの地点の真の位置を指示するために、真位置図形64Y2では概略位置図形64Xよりも小さい小点状の図形に、真位置図形64Y1では概略位置図形64Xよりも小さい十文字状の図形にしてある。なお、十文字状の図形では十文字の交点を真の位置としている。
【0156】
また、真位置図形64Y1・64Y2は、真の位置を指示する箇所が概略位置図形64Xの中に位置付けられていればよいので、図6の中央の列または右側の列の図形のように、概略位置図形64Xの中の偏心した位置に真位置図形64Y1・64Y2を位置付けて表示してもよいものである。なお、真位置図形64Y1の十文字状の図形には、斜めの十文字、すなわち、「×」形の図形にして構成する場合を含むものである。
【0157】
したがって、各マークを判別し易くするために、図7のように、概略位置図形64Xを従来のマークの大きさよりも大きくしても、真位置図形64Y1・64Y2によって、マークを付した地点の真の位置を明確に判別し得るので、上記の〔第2の課題〕を解決し得たことになるわけである。
【0158】
つまり、この第2実施例の構成は、概括的には、第1には、上記のような
自船位置10aの地点を含む航行関連情報の画像を所定の尺度、例えば、縮尺1/10000で表示する表示、例えば、図14のような表示と、上記の自船位置10aから離れた他の地点、例えば、目的地点JP1を含む航行関連情報の画像を上記の尺度1/10000を他の尺度、例えば、1/400に変更して表示する表示、例えば、図17のような表示とを行い得るようにした航法装置100において、
【0159】
各上記の航行関連情報に付随する各所定の地点、例えば、自船位置10a・目的地点JP1・留意地点EV1・留意地点EV2などを大略的に識別するための上記の各所定の地点を囲む図形、例えば、概略位置図形64Xを表示するとともに、上記の図形の中の上記の各所定の地点、例えば、自船位置10a・目的地点JP1・留意地点EV1・留意地点EV2などの真の位置を指示するための図形、例えば、真位置図形64Y1・64Y2を表示する地点識別図形表示手段を設けた第4の構成を構成しているものである。
【0160】
また、第2には、上記の第4の構成において、
例えば、図7の〔円形マーク〕〔四角形マーク〕〔三角形マーク〕のように、上記の地点を囲む図形、例えば、概略位置図形64Xを円形または多角形による第1の図形とし、上記の真の位置を指示するための図形、例えば、真位置図形64Y1・64Y2を上記の第1の図形よりも小さい点状または十文字状の第2の図形とした上記の第5の構成を構成しているものである。
そして、これらの第4の構成・第5の構成によれば、上記のように、上記の〔第2の課題〕を解決しているものである。
【0161】
〔第3実施例〕
以下、図1〜図3・図8・図9により第3実施例を説明する。この第3実施例の構成は、上記の第1実施例における図1〜図3の構成において、図8・図9の記憶保存構成を設けた構成であり、作業用メモリ(2)73Bに記憶している記憶内容と、保存用メモリ70Xの対応する記憶領域部分の記憶内容とを、装置の電源を投入したときのみ、同一化することによって、上記の〔第3の課題〕を解決し得るようにしたものである。
【0162】
図8において、作業用メモリ(2)73Bの記憶内容は図3の作業用メモリ(2)73Bの記憶内容を簡略化して記載したものであり、保存用メモリ70Xの記憶内容は、作業用メモリ(2)73Bの記憶領域に対応する表示条件データ記憶領域70X1・マーク関連データ記憶領域70X2のほかに、航跡関連データ記憶領域70X3を2つの記憶領域に分けた航跡関連データ記憶領域(1)70X3(1)・航跡関連データ記憶領域(2)70X3(2)と、地図データ記憶領域70X4とが設けてある。
【0163】
航跡関連データ記憶領域(1)70X3(1)の部分が、作業用メモリ(2)73Bの航跡関連データ記憶領域73B3に対応しており、航跡関連データ記憶領域(2)70X3(2)の部分は、図2の航跡設定操作部分63Xにおける「記憶」キー63Bの操作によるメニュー画面により、航跡番号などの特定の記憶事項を付した航跡に含まれる全ての航跡点データ・マークデータを記憶する記憶領域の部分である。
【0164】
また、図2の航跡設定操作部分63Xにおける「呼出」キー63Cの操作によって図14の過去航跡CR2を呼出すときは、航跡関連データ記憶領域(2)70X3(2)の部分の記憶内容を読み出して表示するものである。
【0165】
地図データ記憶領域70X4には、予め、地図データを記憶してあり、必要に応じて、適宜の入力部分(図示せず)から、新たな地図データを与えて、記憶内容を書き換えるように構成する。
【0166】
保存用メモリ70Xは、電気的に書換可能で電気不要で記憶保持する不揮発のメモリ、例えば、フラッシュメモリで構成してあり、フラッシュメモリには、図示していないが、各書換ブロック別に書換を行うための制御回路部分が設けてあり、所定のデータによるコード信号を与えることによって、まず、指定した書換ブロックの記憶内容が消去され、その消去が終了した信号にもとづいて、書換を行う記憶内容のデータを与えて、その書換ブロックに記憶させることができる機能が設けられている。
【0167】
そして、書換ブロックrm1〜rmnを作業用メモリ(2)73Bの記憶内容と対応させる部分とし、書換ブロックrn1〜rnnを航跡関連データ記憶領域(2)70X3(2)の部分とし、書換ブロックro1〜ronを地図データ記憶領域70X4とするように割り当てている。
【0168】
ところで、作業用メモリ(2)73Bの記憶内容は記憶保持用電池77を与えて記憶保持しているので、電池の不良などによって、記憶内容が乱されてしまい、また、保存用メモリ70Xの記憶内容は何らかの信号操作の誤りに起因して記憶内容が部分的に消失してしまうことがある。
【0169】
このため、作業用メモリ(2)73Bの各記憶領域73B1〜73B3の記憶部分と、この記憶部分に対応する保存用メモリ70Xの記憶領域70X1〜70X3(1)の記憶部分とには、例えば、これらの各記憶領域の記憶内容の特定箇所、例えば、各記憶領域の冒頭箇所に、記憶内容を確認するためのチェックビットの部分を設けるとともに、このチェックビットの部分に、予め定めたコード、例えば、01〜XXのコードを記憶してあり、このチェックビットの記憶状態、すなわち、01〜XXの記憶が予め定めたとおりの状態になっているときは、記憶内容が保全されているものとして判別するように構成している。
【0170】
なお、チェックビット01〜XXの部分は、具体的には、例えば、各記憶領域73B1〜73B3・70X1〜70X3(1)ごとに、その冒頭における4バイトの部分、すなわち、32ビットの部分に4ビットによる2進数の01〜08、すなわち、「0001」「0010」「0011」「0100」「0101」「0110」「0111」「1000」を記憶しておくように構成している。
【0171】
そして、作業用メモリ(2)73Bまたは保存用メモリ70Xに、上記の記憶内容の部分的な消失が生じた場合に、この消失を救済するための制御処理として、処理用メモリ72に、図9の制御処理フローによるプログラムを記憶させて、記憶の制御処理を行うことにより、上記の〔第3の課題〕を解決するようにした箇所である。
【0172】
以下、図9の制御処理フローを説明する。図9の制御処理フローは、航行情報処理部分70における主要な制御処理を行うためのメイン制御処理ルーチンのサブルーチンとして構成してあり、上記のように、電源スイッチ67Bまたは基幹電源スイッチ51の操作によって、装置の動作電源が与えられた直後にのみ、図9の制御処理フローに移行してくるように構成してある。
【0173】
〔図9の制御処理フローの説明〕
◆ステップSP1では、作業用メモリ(2)73Bのチェックビットと、保存用メモリ70Xのチェックビットとの記憶内容を取り込んで次のステップSP2に移行する。
【0174】
◆ステップSP2では、作業用メモリ(2)73Bのチェックビットの記憶コード01〜XXと、保存用メモリ70Xのチェックビットの記憶コード01〜XXとを確認して、そのいずれもが正常であるか否かを判別する。いずれもが正常であるときはステップSP6に移行し、そうでないときは次のステップSP3に移行する。
【0175】
◆ステップSP3では、作業用メモリ(2)73Bのチェックビットの記憶コード01〜XXが正常であるか否かを判別する。正常であるときはステップSP6に移行し、そうでないときは次のステップSP4に移行する。
【0176】
◆ステップSP4では、保存用メモリ70Xのチェックビットの記憶コード01〜XXが正常であるか否かを判別する。正常であるときはステップSP7に移行し、そうでないときは次のステップSP5に移行する。
【0177】
◆ステップSP5では、作業用メモリ(2)73B・保存用メモリ70Xのいずれもが異常状態、すなわち、「メモリ故障」である旨の警報を表示画面81に表示するとともに、適宜の警音部分(図示せず)、例えば、圧電ブザーなどにより警音する状態にした後に、メイン制御処理ルーチンの所定のステップ部分に移行する。
【0178】
◆ステップSP6では、作業用メモリ(2)73Bに記憶されている記憶内容の全てを、保存用メモリ70Xの対応記憶箇所、すなわち、書換ブロックrm1〜rmnに記憶する書換動作を行って、記憶内容を同一化した後に、メイン制御処理ルーチンの所定のステップ部分に移行する。
【0179】
◆ステップSP6では、保存用メモリ70Xの記憶内容のうちの作業用メモリ(2)73Bに対応する記憶箇所、すなわち、書換ブロックrm1〜rmnに記憶されている記憶内容の全てを、作業用メモリ(2)73Bに記憶する書換動作を行って、記憶内容を同一化した後に、メイン制御処理ルーチンの所定のステップ部分に移行する。
【0180】
なお、上記のステップSP2〜SP4での判別は、例えば、チェックビットの記憶コード01〜XXの各コードの2進数の総和の数が所定値になっているか否かによって判別することができる。
【0181】
上記の制御処理によれば、電源の投入・遮断が基幹電源スイッチ51によって行われたときでも、航法装置100に電源が投入される度ごとに、作業用メモリ(2)73Bの記憶内容と、この記憶内容に対応する保存用メモリ70Xの書換ブロックrm1〜rmnの記憶内容とが同一化される。
【0182】
そして、両方のメモリの記憶内容または作業用メモリ(2)73Bの記憶内容のみが正常のときは、常に、保存用メモリ70Xの書換ブロックrm1〜rmnが新しい記憶内容に書換保存される。
【0183】
また、保存用メモリ70Xの書換ブロックrm1〜rmnの記憶内容のみが正常のときは、その記憶内容が作業用メモリ(2)73Bに記憶し直されるので、当面における航行関連情報の画像表示動作には、一応、不都合がない程度に記憶内容を修復することができるので、上記の〔第3の課題〕を解決し得たことになるわけである。
【0184】
つまり、この第3実施例の構成は、概括的には、第1には、上記の第4の構成における航法装置100と同様の航法装置100において、
各上記の関連情報のうちの所定の情報、例えば、表示条件データ・マーク関連データ・航跡関連データの情報を記憶するための記憶部分として、上記の記憶を電気的に書換可能で電気的に記憶保持する揮発性記憶部分、例えば、スタティクRAMを記憶保持用電池77で記憶保持する作業用メモリ(2)73Bと、上記の記憶を電気的に書換可能で電気不要で記憶保持する不揮発性記憶部分、例えば、フラッシュメモリによる保存用メモリ70Xとを設ける記憶部併設手段と、
【0185】
例えば、電源スイッチ67Bまたは基幹電源スイッチ51により、装置の動作電源が投入されたときのみ、上記の不揮発性記憶部分、例えば、保存用メモリ70Xと、上記の揮発性記憶部分、例えば、作業用メモリ(2)73Bとの対応する記憶内容、例えば、表示条件データ記憶領域70X1・マーク関連データ記憶領域70X2・航跡関連データ記憶領域(1)70X3(1)の記憶内容と表示条件データ記憶領域73B1・マーク関連データ記憶領域73B2・航跡関連データ記憶領域73B3を同一にするための処理、例えば、図9の制御処理フローによる処理を行う記憶同一化処理手段とを設けた上記の第6の構成を構成しているものである。
【0186】
また、第2には、上記の第6の構成において、
上記の揮発性記憶部分を、例えば、作業用メモリ(2)73BのスタテイックRAMと記憶保持用電池77とで構成し、上記の不揮発性記憶部分を、例えば、保存用メモリ70Xのフラッシュメモリで構成した上記の第7の構成を構成しているものである。
そして、これらの第6の構成・第7の構成によれば、上記のように、上記の〔第3の課題〕を解決しているものである。
【0187】
〔第4実施例〕
以下、図1〜図3・図7・図10により第4実施例を説明する。この第4実施例の構成は、上記の第1実施例における図1〜図3の構成において、図7・図10のような2つのカーソルを表示する構成を設けたものである。
【0188】
図7において、従来技術と同様のカーソルCLX・CLYを「大形のカーソル」とし、図7に示したような十文字状の図形による小形カーソルCLZを「小形のカーソル」として構成するとともに、十文字の交点の箇所を指定点CPにしている。また、十文字状の図形は縦横1cm程度の大きさにして、比較的に判別し易くしている。
【0189】
なお、「大形のカーソル」は、カーソルCLX・CLYを実線に変更して表示してもよく、また、小形カーソルCLZの十文字状の図形には、斜めの十文字、すなわち、「×」形の図形に表示する場合を含むものである。
【0190】
そして、作業用メモリ(2)73Bに記憶しているカーソル図形を上記の「大形のカーソル」と「小形のカーソル」との2種類にして記憶するとともに、カーソルが異動しているときは「大形のカーソル」を、カーソルが停止しているときは「小形のカーソル」を表示するために、処理用メモリ72に、図10の制御処理フローによるプログラム記憶させて、表示の制御処理を行うことにより、上記の〔第4の課題〕を解決するように構成したものである。
【0191】
以下、図10の制御処理フローを説明する。図10の制御処理フローは、航行情報処理部分70における主要な制御処理を行うためのメイン制御処理ルーチンのサブルーチンとして構成してあり、例えば、1秒ごとに、図10の制御処理フローに移行してくるように構成してある。
【0192】
〔図10の制御処理フローの説明〕
◆ステップSP1では、「カーソル」を表示する操作が行われたか否かを判別する。「カーソル」を表示する操作が行われたときは次のステップSP2に移行し、そうでないときはメイン制御処理ルーチンの所定のステップ箇所に戻る。
【0193】
ここでの判別は、図2の目的地等設定操作部分62Xにおける「カーソル」キー62Hによってカーソルを表示する操作を行った入力のデータがあるか否かによって判別する。
◆ステップSP2では、小形カーソルCLZを表示した後に、次のステップSP3に移行する。
【0194】
◆ステップSP3では、「カーソル」を移動する操作が行われたか否かを判別する。「カーソル」を移動する操作が行われたときはステップSP6に移行し、そうでないときは次のステップSP4に移行する。
【0195】
ここでの判別は、任意方向移動操作部分68をいずれかの方向に操作することにより、「カーソル」を移動する操作を行った入力のデータがあるか否かによって判別する。
【0196】
◆ステップSP4では、「カーソル」を消去する操作が行われたか否かを判別する。「カーソル」を消去する操作が行われたときは次のステップSP5に移行し、そうでないときはステップSP3に戻る。
ここでの判別は、「カーソル」キー62Hによってカーソルを消去する操作を行った入力のデータがあるか否かによって判別する。
【0197】
◆ステップSP5では、「カーソル」を消去した後に、メイン制御処理ルーチンの所定のステップ箇所に戻る。
◆ステップSP6では、「大形のカーソル」、すなわち、カーソルCLX・CLYを表示した後に、次のステップSP7に移行する。
【0198】
◆ステップSP7では、「カーソル」を停止する操作が行れたか否かを判別する。「カーソル」を停止する操作が行われたときはステップSP2に戻り、そうでないときは、このステップSP7を繰り返す。
【0199】
ここでの判別は、任意方向移動操作部分68を停止位置、例えば、ジョイスティクの中立位置に位置付けて、「カーソル」を移動する入力のデータが無い状態にしたか否かによって判別する。
【0200】
したがって、この第4実施例の構成によれば、「カーソル」を移動状態にしたときは「大形のカーソル」、すなわち、カーソルCLX・CLYが表示されるので、従来と同様に、指定点CPを目的とする箇所に容易に合致させることができる。
【0201】
また、「カーソル」を停止状態にしてときは小形カーソルCLZが表示されるので、大形のカーソルCLX・CLYに邪魔されずに、画像の他の箇所を見ることができるので、上記の〔第4の課題〕を解決し得たことになる。
【0202】
なお、小形カーソルCLZの指定点CPには、必要に応じて、大形のカーソルCLX・CLYの指定点CPに図示したと同様の「◎」マークを表示するように構成することを含むものである。
【0203】
つまり、この第4実施例の構成は、概括的には、第1には、上記の第4の構成における航法装置100と同様の航法装置100において、
各上記の表示状態の表示を行う画面、例えば、図7のような表示画面81における任意の点を指定するために、上記の画面の中を移動可能で上記の任意の点を通るカーソル、例えば、「大形のカーソル」または「小形のカーソル」を表示するカーソル表示手段と、
【0204】
上記のカーソルの移動中は上記のカーソルを上記の画面、例えば、表示画面81の横方向全体BBにわたる横線と上記の画面の縦方向全体HBにわたる縦線とによる大形のカーソル、例えば、カーソルCLX・CLYにより表示し、上記のカーソルの停止中は上記のカーソルを上記の任意の点の部分のみ指示する小形のカーソル、例えば、小形カーソルCLZにより表示する大小カーソル表示手段とを設けた上記の第8の構成を構成しているものである。
【0205】
第2には、上記の第8の構成において、
上記の大形のカーソル、例えば、カーソルCLX・CLYの上記の横線と上記の縦線とを点線または実線で表示し、上記の小形のカーソル、例えば、小形カーソルCLZを縦横1cm程度の十文字状の図形とした上記の第9の構成を構成しているものである。
そして、これらの第8の構成・第9の構成によれば、上記のように、上記の〔第4の課題〕を解決しているものである。
【0206】
〔第5実施例〕
以下、図1〜図3・図11・図12により第5実施例を説明する。この第5実施例の構成は、上記の第1実施例における図1〜図3の構成において、図11・図12のような航跡の地点データの自動取込構成を設けた構成である。
【0207】
図2において、航跡設定操作部分63Xにおける航跡の「接/断」キー63Dの操作による「接」状態に、「距離間隔」の「接」状態と、「時間間隔」の「接」状態と、「自動間隔」の「接」状態との3つの「接」状態を設けて構成してある。
【0208】
「距離間隔」の「接」状態では、航跡の地点データの取込間隔、すなわち、自船位置10aのデータを取り込んで記憶する間隔を、所定の距離間隔、例えば、移動距離100mごとの間隔で行う状態、例えば、図12の距離間隔取込記憶DPを行う状態になる。なお、図12において、ごく小さい○印の箇所は実際には表示されないが、取込記憶の状態を理解し易くするために画いたものである。
【0209】
「時間間隔」の「接」状態では、航跡の地点データの取込間隔を、所定の時間間隔、例えば、10秒ごとの間隔で行う状態、例えば、図12の時間間隔取込記憶TPを行う状態になる。
【0210】
「自動間隔」の「接」状態、すなわち、上記の自動取込構成による状態では、図12のように、自船速度10bが、所定の速度以上10bS2、例えば、3ノット以上のときは、自動的に、上記の「距離間隔」の「接」状態、例えば、図12の時間間隔取込記憶TPを行う状態になり、所定の速度未満10bS1、例えば、3ノット未満のときは、自動的に、上記の「距離間隔」の「接」状態、例えば、図12の距離間隔取込記憶DPの状態になるように動作する。
【0211】
さらに、「自動間隔」の「接」状態において、「時間間隔」の「接」状態から「距離間隔」の「接」状態に戻るときには、上記の所定の速度10bS、例えば、3ノットよりも、「−α」、例えば、1ノット分だけ低い速度、例えば、2ノットの速度になるまで、「距離間隔」の「接」状態に戻らないようにした動作、すなわち、例えば、図12の〔ヒステリヒス動作〕を行わせるように構成してある。
【0212】
なお、このヒステリヒス動作は、自船速度10bが所定の速度10bS、例えば、3ノット付近でふらふら変動している場合に、それにしたがって、距離間隔取込記憶DPと時間間隔取込記憶TPとが頻繁に切り換えられ、制御の混乱を招くことを防止するために行う動作である。
【0213】
そして、図3の作業用メモリ(2)73Bの表示条件データ記憶領域73B1に、上記の動作に必要なデータを記憶するとともに、処理用メモリ72に、図11の制御処理フローによるプログラム記憶させて、表示の制御処理を行うことにより、上記の「自動間隔」の「接」状態の動作を行わせて、上記の〔第5の課題〕を解決するように構成したものである。
【0214】
以下、図11の制御処理フローを説明する。図11の制御処理フローは、航行情報処理部分70における主要な制御処理を行うためのメイン制御処理ルーチンのサブルーチンとして構成してあり、航跡の「接/断」キー63Dを「接」状態にしたデータを読み取ったときに、図11の制御処理フローに移行してくるように構成してある。
【0215】
〔図11の制御処理フローの説明〕
◆ステップSP1では、「自動間隔」の「接」状態にする操作が行われたか否かを判別する。「自動間隔」の「接」状態にする操作が行われたときは次のステップSP2に移行し、そうでないときはメイン制御処理ルーチンの所定のステップ箇所に戻る。
ここでの判別は、航跡の「接/断」キー63Dを操作して「自動間隔」の「接」状態にした入力のデータがあるか否かによって判別する。
【0216】
◆ステップSP2では、自船速度10bが上記の所定の速度未満10bS1、例えば、3ノット未満になっているか否かを判別する。所定の速度未満10bS1になっているときはステップSP10に移行し、そうでないときは次のステップSP3に移行する。
【0217】
◆ステップSP3では、ヒステリヒス動作を行わせるための「−α」、例えば、−1ノットを設定した後に、次のステップSP4に移行する。なお、既に「−α」が設定されているときは、そのまま、次のステップSP4に移行する。
【0218】
ここでの「−α」の設定は、ステップSP2で判別する所定の速度未満10bS1、例えば、3ノット未満の値を「−α」、例えば、−1ノットした2ノット未満に変更するデータを、例えば、作業用メモリ(2)73Bの表示条件データ記憶領域73B1に記憶する動作を行う。
【0219】
◆ステップSP4では、上記の時間間隔取込記憶TPを1回数だけ行った後に、次のステップSP5に移行する。ここでの取込記憶は、作業用メモリ(2)73Bの航跡関連データ記憶領域73B3の地点のデータに記憶する。
【0220】
なお、上記のステップSP3での「−α」の設定が行われたとき、すなわち、初回の時間間隔取込記憶TPのときは、直ちに、自船位置10aのデータを取り込むとともに、時計回路76による所定の時間間隔、例えば、10秒こどの計時を行わせ、次回以後の取込記憶の時間を決めるように動作する。
【0221】
◆ステップSP5では、その回の航跡において、初回の取込記憶、すなわち、航跡始点LSであるか否かを判別する。航跡始点LSであるときはステップSP12に移行し、そうでないときは次のステップSP6に移行する。
ここでの判別は、作業用メモリ(2)73Bの航跡関連データ記憶領域73B3に、航跡データが全く記憶されていないことによって判別する。
【0222】
◆ステップSP6では、前回の時間間隔取込記憶TPの地点、または、前回の距離間隔取込記憶DPの地点と、今回の時間間隔取込記憶TPの地点、または、今回の距離間隔取込記憶DPとの間を結ぶ線、すなわち、航跡素線LEを描画するデータを記憶した後に、次のステップSP7に移行する。
ここでのデータの記憶は、作業用メモリ(2)73Bの航跡関連データ記憶領域73B3の属性のデータを「継続」のデータにして記憶する。
【0223】
◆ステップSP7では、「自動間隔」の「接」状態を中止した状態にされたか否かを判別する。中止した状態にされたときは次のステップSP8に移行し、そうでないときはステップSP2に戻る。
ここでの判別は、ステップSP2で判別に用いたデータ、すなわち、「自動間隔」の「接」状態の入力のデータが無くなっているか否かによって判別する。
【0224】
◆ステップSP8では、航跡の「断」状態にされたか否かを判別する。航跡の「断」状態にされたときは次のステップSP9に移行し、そうでないときはメイン制御処理ルーチンの所定のステップ箇所、すなわち、上記の「距離間隔」の「接」状態または「時間間隔」の「接」状態の処理を行うステップに移行する。
ここでの判別は、航跡の「接/断」キー63Dを操作して「断」状態にした入力のデータがあるか否かによって判別する。
【0225】
◆ステップSP9では、航跡の「終点」のデータを記憶した後に、メイン制御処理ルーチンの所定のステップ箇所、すなわち、上記の航跡表示動作を終了する処理を行うステップに移行する。
ここでのデータの記憶は、作業用メモリ(2)73Bの航跡関連データ記憶領域73B3の属性は「不継続」なので、「継続」のデータを記憶しないことによって、航跡終点CREとしている。
【0226】
◆ステップSP10では、ヒステリヒス動作を行わせるために、ステップSP3で設定した「−α」を解除した後に、次のステップSP11に移行する。既に「−α」が解除されているときは、そのまま、次のステップSP4に移行する。
【0227】
ここでの「−α」の解除は、ステップSP3で、作業用メモリ(2)73Bの表示条件データ記憶領域73B1に記憶した「−α」のデータを、元の所定の速度3ノットに戻したデータに記憶し直す動作を行う。
【0228】
◆ステップSP11では、上記の距離間隔取込記憶DPを1回数だけ行った後に、ステップSP5に移行する。ここでの取込記憶は、作業用メモリ(2)73Bの航跡関連データ記憶領域73B3に記憶する。
【0229】
なお、上記のステップSP10での「−α」の解除が行われたとき、すなわち、初回の距離間隔取込記憶TDのときは、直ちに、自船位置10aのデータを取り込むとともに、自船位置10aの変化による距離値の変化を求める演算を開始して、所定の距離間間隔、例えば、100mこどの時点に、次回以後の取込記憶を行うように動作する。
【0230】
◆ステップSP12では、航跡の「始点」のデータを記憶した後に、ステップSP7に移行する。
ここでのデータの記憶は、作業用メモリ(2)73Bの航跡関連データ記憶領域73B3の属性は「不継続」なので、「継続」のデータを記憶しないことによって、航跡始点CRSとしている。
【0231】
したがって、上記の制御処理によれば、図12のように、所定速度値未満10bS1の航行状態の範囲では距離間隔取込記憶DPによって自船位置10aのデータが記憶され、所定速度値以上10bS2の航行状態の範囲では時間間隔取込記憶TPによって自船位置10aのデータが記憶される。
【0232】
このため、時間間隔取込記憶TPの部分では取込記憶を行う距離間隔がランダムにはなるが、所定速度値未満10bS1の航行状態の範囲での無駄な取込記憶が自動的に防止し得るので、上記の〔第5の課題〕を解決し得たことになる。
【0233】
そして、一般に、船舶では、蛇行した航路を航行する場合には速度を遅くして航行し、直線的な航路を航行する場合には速度を速くして航行するので、この第5実施例の構成によれば、自動的に、蛇行した航路での自船位置10aの取込記憶を比較的細かい距離間隔にして航跡を忠実に記録させ、また、直線的な航路では自船位置10aの取込記憶を比較的粗い時間間隔にしても、航路が直線的なので航路を忠実に記録させ得るので、航跡関連データ記憶領域70X3に記憶する記憶量の無駄を無くすることができる。
【0234】
なお、位置測定部分10にロランC電波航法またはデッカ電波航法による電波航法受信機を用いている場合などで、自船速度10bの演算が間に合わないときは、船舶のスクリュウ軸またはエンジンの回転数による速度を自船速度として上記の自船速度の判別を行うように構成することができる。
【0235】
つまり、この第5実施例の構成は、概括的には、上記の第4の構成における航法装置100と同様の航法装置100において、
上記の自船位置10aの位置値を、例えば、作業用メモリ(2)73Bの航跡関連データ記憶領域73B3に、取り込んで記憶した記憶内容にもとづいて自船の航跡、例えば、自船航跡CR1を表示する航跡表示手段と、
【0236】
自船速度10bが、所定値10bSに達しているとき、すなわち、所定速度以上10bS2のときは所定の時間間隔ごと、例えば、10秒に取り込んで上記の記憶を行い、上記の所定値10bSに満たないとき、すなわち、所定速度未満10bS1のときは所定の距離間隔ごと、例えば、100mごとに取り込んで上記の記憶を行う取込記憶手段とを設けた上記の第10の構成を構成しているものである。
【0237】
また、第2には、上記の第10の構成において、
上記の自船速度10bとして、上記の自船位置10aを測定する位置測定部分10、例えば、GPS電波航法による電波航法受信機により得られる自船速度10bを用いる上記の第11の構成を構成しているものである。
【0238】
さらに、第3には、上記の第10の構成・第11の構成において、
上記の所定値10bSの判別をヒステリヒス動作、例えば、図11の〔ヒステリヒス動作〕により行う上記の第12の構成を構成しているものである。
そして、これらの第10の構成〜第12の構成によれば、上記のように、上記の〔第5の課題〕を解決しているものである。
【0239】
〔変形実施〕
この発明は次のように変形して実施することを含むものである。
【0240】
(1)第1実施例の図4・図5による構成を図13・図15の構成に適用して構成する。
(2)第2実施例の図7による構成を図13・図15の構成に適用して構成する。
【0241】
(3)第3実施例における地図データ記憶領域70X4の部分を、図13・図15の構成のように、独立した地図データ用メモリ75、または、外部記憶部分90に変更して構成する。
【0242】
(4)第3実施例における保存用メモリ70Xを、他の構成をもつ電気的に書換可能で電気不要で記憶保持する記憶回路、例えば、各書換ブロック別に書換用の電圧と書換用の記憶データとを与えて各書換ブロック別に書換を行うようにしたフラッシュメモリなどに変更して構成する。
【0243】
(5)第3実施例における保存用メモリ70Xと作業用メモリ(2)73Bとを各記憶領域別に、または複数記憶領域別に構成して、同様の書換動作を行わせるように変更して構成する。
【0244】
(6)第3実施例における保存用メモリ70Xと作業用メモリ(2)73Bとの間の書換を、各記憶領域ごとに、チェックビット01〜XXの良否を判別し、その判別が良い方から悪い方に書換を行うように変更して構成する。
【0245】
(7)第3実施例におけるチェックビットの部分を、各記憶領域ごとに個別に設けずに、これらの記憶領域全体の特定の箇所のみに設けるように変更して構成する。
【0246】
(8)第4実施例における作業用メモリ(2)73Bにも、航跡関連データ記憶領域(2)70X3(2)と同様の記憶領域を設けた構成に、図9の制御処理を適用して構成する。
【0247】
(9)第5実施例における「自動間隔」の「接」状態の構成を図13・図15の構成に適用して構成する。
(10)第5実施例の構成において、「距離間隔」の「接」状態と、「時間間隔」の「接」状態との構成部分を除去し、「自動間隔」の「接」状態のみを設けて構成する。
【0248】
(11)第2実施例〜第5実施例の構成から「尺度の変更」を行う構成部分を除去して構成する。
(12)文字情報TTの表示を表示画面81の下方に1列または複数列にして表示する。
(13)第1実施例〜第5実施例の構成と上記(1)〜(12)の構成とのうちの任意の複数を組み合わせて構成する。
【0249】
(14)第1実施例〜第5実施例の構成と上記(1)〜(13)の構成における進路ずれの表示を行う部分を図16の進路ずれの構成に変更して構成する。
(15)第1実施例〜第5実施例の構成と上記(1)〜(14)の構成において、図11の〔ヒステリシス動作〕を、( )書きのように、所定値Sに対して±△Sだけ増減させた箇所でヒステリシス動作を行うように変更して構成する。
【0250】
(16)第1実施例〜第5実施例の構成と上記(1)〜(15)の構成において、位置測定部分10における自船位置10a・自船速度10b・現在進行方向10cを得るための演算処理の全部または一部を航行情報処理部分70に配置して構成する。
【図面の簡単な説明】
【0251】
図面中、図1〜図12はこの発明の実施例を、また、図13〜図18は従来技術を示し、各図の内容は次のとおりである。
【図1】全体ブロック構成・具体構成斜視図
【図2】要部具体構成正面図
【図3】要部記憶構成図
【図4】要部制御処理構成図
【図5】要部制御処理構成図
【図6】要部表示図形構成図
【図7】要部表示構成図
【図8】要部記憶保存構成図
【図9】要部制御処理構成図
【図10】要部制御処理構成図
【図11】要部制御処理構成図
【図12】要部表示構成図
【図13】全体ブロック構成・具体構成斜視図
【図14】要部表示構成図
【図15】要部具体構成正面図
【図16】要部表示構成図
【図17】要部表示構成図
【図18】要部表示構成図
【符号の説明】
【0252】
10 位置測定部分
10a 自船位置
10b 自船速度
10bS 所定速度
10bS1 所定速度未満
10bS2 所定速度以上
10c 現在進行方向
20 航行関連情報表示部分
50 船内電源
51 基幹電源スイッチ
52 内部電源
55 自己保持回路
60 設定操作部分
61 画面選択操作部分
62 目的地等設定操作部分
62X 目的地等設定操作部分
62A 「メニュー」キー
62B 「目的地」キー
62C 「走錨」キー
62D 「取消」キー
62E 「解除」キー
62F 「決定」キー
62G 「航法切換」キー
62H 「カーソル」キー
62J 「復帰」キー
63 航跡設定操作部分
63X 航跡設定操作部分
63A 「航跡色」スイッチ
63B 「記憶」キー
63C 「呼出」キー
63D 「接/断」キー
63E 「航跡消去」キー
64 マーク設定操作部分
64X マーク設定操作部分
64A 「マーク色」スイッチ
64B 「○」キー
64C 「□」キー
64D 「▽」キー
64E 「×」キー
64F 「マーク消去」キー
64X 概略位置図形
64Y1 真位置図形
64Y2 真位置図形
65 数値等設定操作部分
66 画面設定操作部分
66X 画面設定操作部分
66A 「縮尺1」キー
66B 「縮尺2」キー
66C 「縮尺3」キー
66D 「拡大」キー
66E 「中央」キー
66F 「縮小」キー
67 電源等操作部分
67A 「電源」キー
67B 電源スイッチ
67C 「輝度」キー
68 任意方向移動操作部分
69 カーソル等設定操作部分
70 航行関連情報処理部分
70X 保存用メモリ
70X1 表示条件データ記憶領域
70X2 マーク関連データ記憶領域
70X3 航跡関連データ記憶領域
70X3(1) 航跡関連データ記憶領域(1)
70X3(2) 航跡関連データ記憶領域(2)
70X4 地図データ記憶領域
71A 入出力ポート
71B 入出力ポート
70A CPU
72 処理用メモリ
73 作業用メモリ
73A 作業用メモリ(1)
73B 作業用メモリ(2)
73B1 表示条件データ記憶領域
73B2 マーク関連データ記憶領域
73B3 航跡関連データ記憶領域
74 航跡データ用メモリ
75 地図データ用メモリ
76 時計回路
77 記憶保持用電池
80 表示処理部分
80A CPU
81 表示画面
82 画像要素用メモリ
83 処理用メモリ
84 表示画像用メモリ
90 外部記憶部分
100 航法装置
B1a 距離幅
BB 横方向幅
CLX カーソル
CLY カーソル
CLZ 小カーソル
CP 指定点
CR1 自船航跡
CR2 過去航跡
CRE 航跡終点
CRS 航跡始点
DP 距離間隔取込記憶
E1 留意地点
E2 留意地点
HB 縦方向幅
JP1 目的地点
L1〜L5 航路線
LE 航跡素線
Ld 等深線
LX 緯度線
LY 経度線
M1 地図(海岸線)
P1〜P4 方向変更点(変針点)
P10 中央位置
P11〜P14 四隅点
RT1 計画航路(ルート)
rm1〜rmm 書換ブロック
rn1〜rnn 書換ブロック
ro1〜ron 書換ブロック
S 所定値
TP 時間間隔取込記憶
TT 文字情報
θ1 進路ずれ
【特許請求の範囲】
【請求項1】
自船位置の地点を含む航行関連情報の画像を所定の尺度で表示する表示、または、前記自船位置から離れた他の地点を含む航行関連情報の画像を前記尺度を他の尺度に変更して表示する表示を行い得るようにした航法装置であって、
前記自船位置の位置値を取り込んで記憶した記憶内容にもとづいて自船の航跡を表示する航跡表示手段と、
自船速度が、所定値に達しているときは所定の時間間隔ごとに取り込んで前記記憶を行い、前記所定値に満たないときは所定の距離間隔ごとに取り込んで前記記憶を行う取込記憶手段とを具備することを特徴とする航法装置。
【請求項2】
前記自船速度として、前記自船位置を測定する位置測定部分により得られる自船速度値を用いることを特徴とする請求項1記載の航法装置。
【請求項3】
前記所定値の判別をヒステリヒス動作により行うことを特徴とする請求項1または請求項2記載の航法装置。
【請求項1】
自船位置の地点を含む航行関連情報の画像を所定の尺度で表示する表示、または、前記自船位置から離れた他の地点を含む航行関連情報の画像を前記尺度を他の尺度に変更して表示する表示を行い得るようにした航法装置であって、
前記自船位置の位置値を取り込んで記憶した記憶内容にもとづいて自船の航跡を表示する航跡表示手段と、
自船速度が、所定値に達しているときは所定の時間間隔ごとに取り込んで前記記憶を行い、前記所定値に満たないときは所定の距離間隔ごとに取り込んで前記記憶を行う取込記憶手段とを具備することを特徴とする航法装置。
【請求項2】
前記自船速度として、前記自船位置を測定する位置測定部分により得られる自船速度値を用いることを特徴とする請求項1記載の航法装置。
【請求項3】
前記所定値の判別をヒステリヒス動作により行うことを特徴とする請求項1または請求項2記載の航法装置。
【図1】


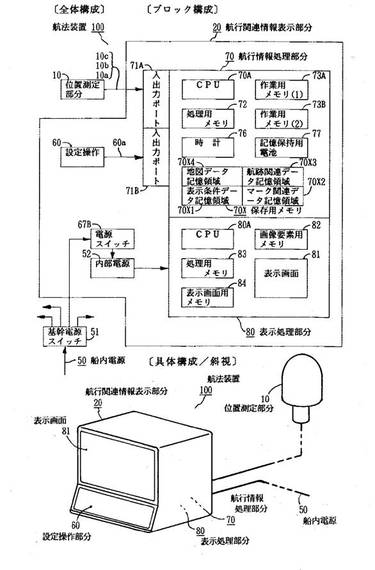
【図2】
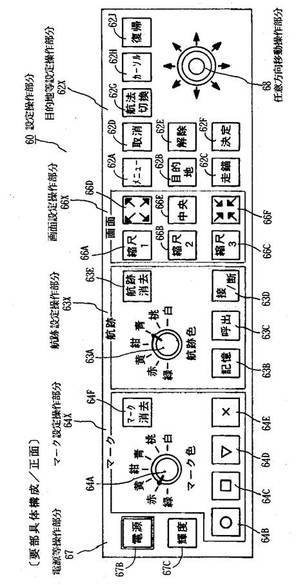
【図3】
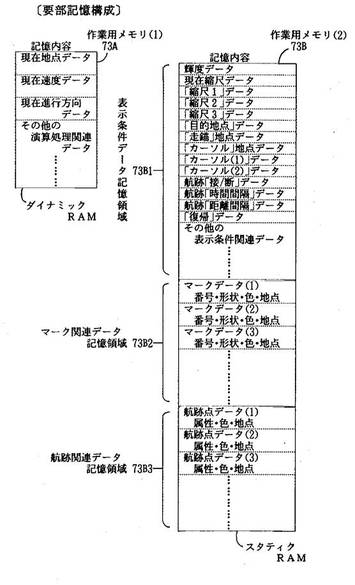
【図4】
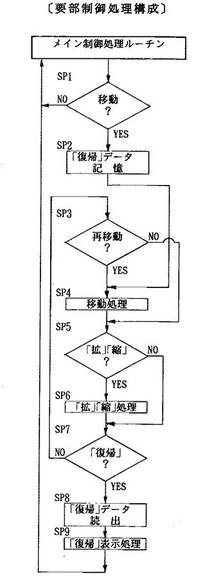
【図5】
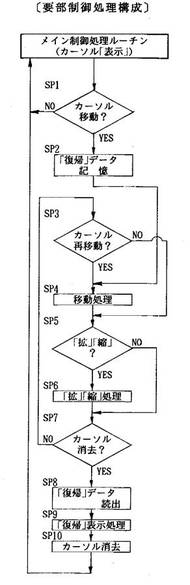
【図6】
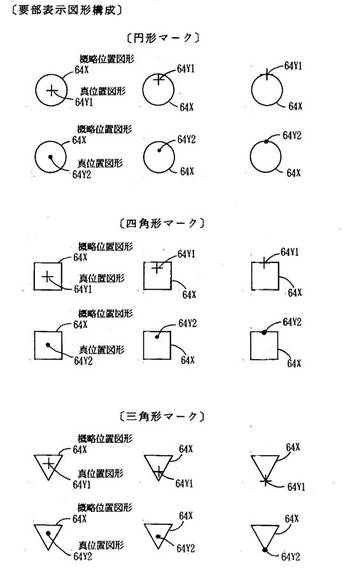
【図7】
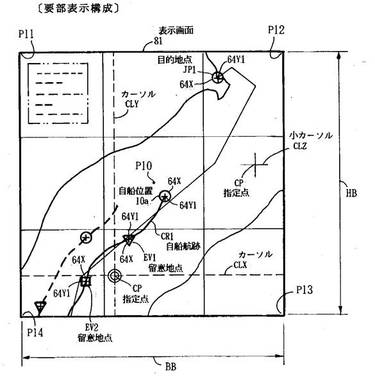
【図8】
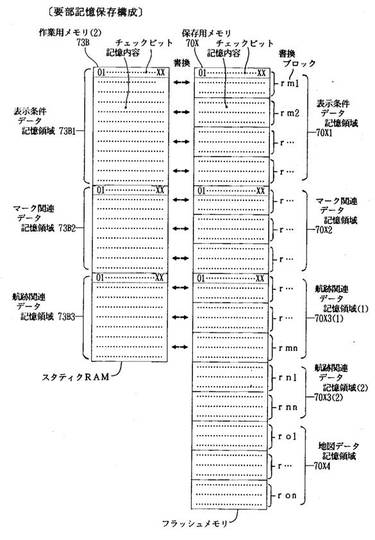
【図9】
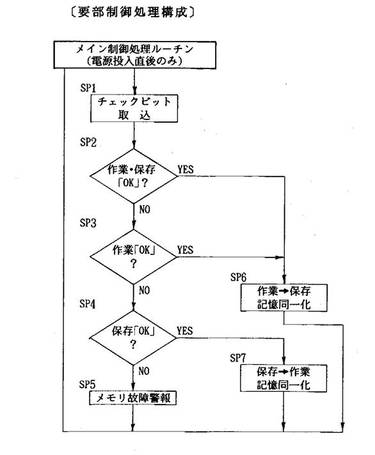
【図10】
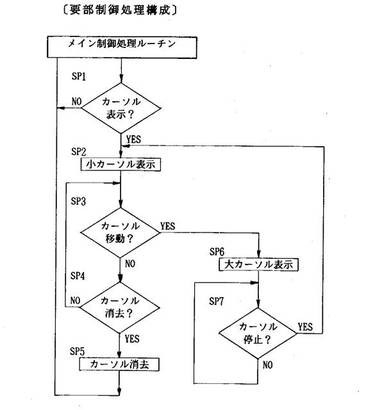
【図11】
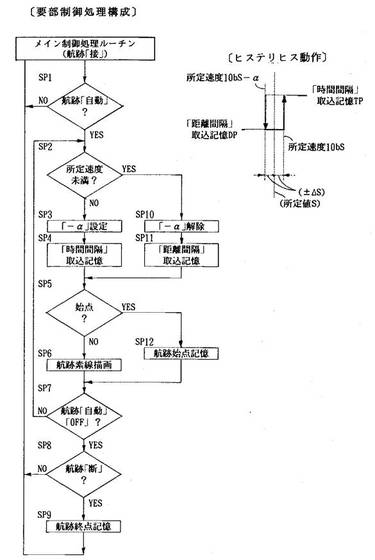
【図12】
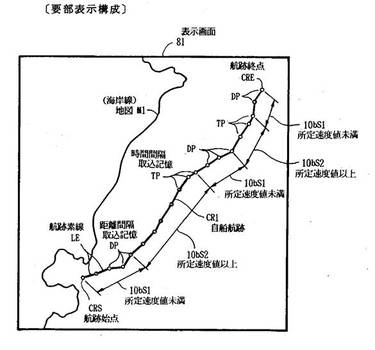
【図13】
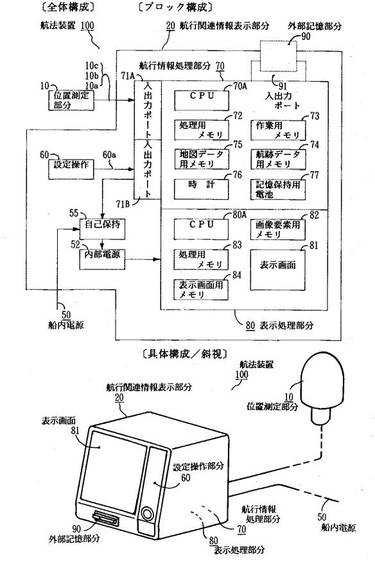
【図14】
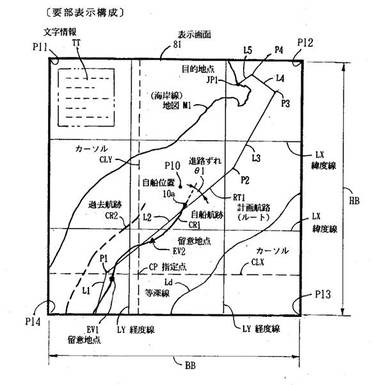
【図15】
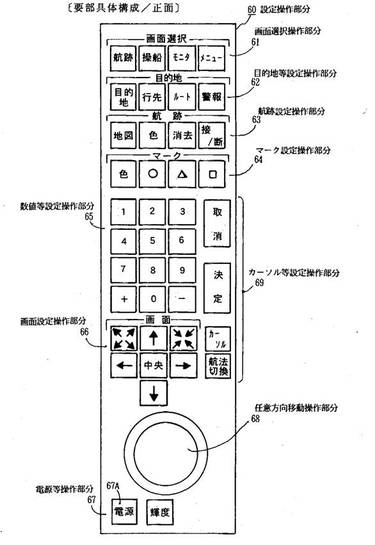
【図16】
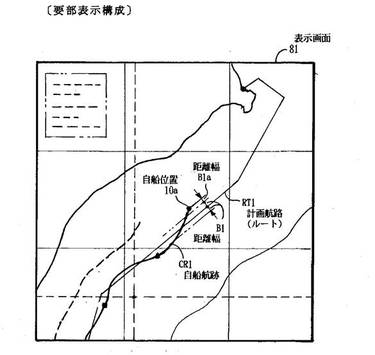
【図17】
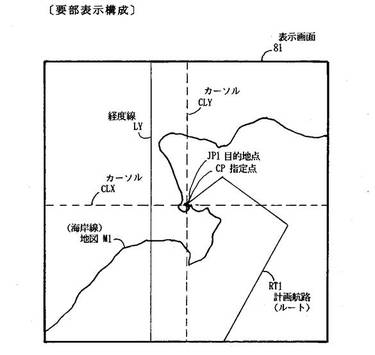
【図18】
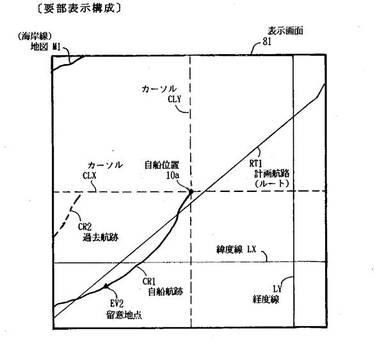
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2010−276614(P2010−276614A)
【公開日】平成22年12月9日(2010.12.9)
【国際特許分類】
【出願番号】特願2010−181968(P2010−181968)
【出願日】平成22年8月16日(2010.8.16)
【分割の表示】特願2004−372491(P2004−372491)の分割
【原出願日】平成12年6月29日(2000.6.29)
【出願人】(000001177)株式会社光電製作所 (32)
【Fターム(参考)】
【公開日】平成22年12月9日(2010.12.9)
【国際特許分類】
【出願日】平成22年8月16日(2010.8.16)
【分割の表示】特願2004−372491(P2004−372491)の分割
【原出願日】平成12年6月29日(2000.6.29)
【出願人】(000001177)株式会社光電製作所 (32)
【Fターム(参考)】
[ Back to top ]