
航法補完装置およびレーダ装置

【課題】本発明は、レーダ装置によって行われた測距または測位の結果を他のレーダ装置によって行われた測距または測位の結果で補完する航法補完装置と、その航法補完装置の機能を所定の機能分散の下で実現するレーダ装置とに関し、従来例に比べて構成が大幅に変更されることなく、至近点に位置する目標の裏に生じる死角を緩和し、または回避できることを目的とする。
【解決手段】異なる位置で距離または位置の測定を個別に行う第一のレーダ装置と第二のレーダ装置との間における連係を通信路を介して行う連係手段と、前記第一のレーダ装置および前記第二のレーダ装置の内、一方によって行われた測定の結果を他方によって行われた測定の結果で補完する補完手段とを備る。
【解決手段】異なる位置で距離または位置の測定を個別に行う第一のレーダ装置と第二のレーダ装置との間における連係を通信路を介して行う連係手段と、前記第一のレーダ装置および前記第二のレーダ装置の内、一方によって行われた測定の結果を他方によって行われた測定の結果で補完する補完手段とを備る。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、レーダ装置によって行われた測距または測位の結果を他のレーダ装置によって行われた測距または測位の結果で補完する航法補完装置と、その航法補完装置の機能を所定の機能分散の下で実現するレーダ装置とに関する。
【背景技術】
【0002】
近年、レーダ装置は、低廉化に併せて小型化が図られ、大型船や漁船だけではなく、レジャーボートのような小型の多様な船舶にも多く搭載されている。
【0003】
図5は、従来のレーダ装置の構成例を示す図である。
従来のレーダ装置は、例えば、図5に示すように、例えば、半島等の陸地40を挟んで隔たった2つの海域に位置する2つの船舶50-1、50-2の何れにも搭載され得る。
船舶50-1に搭載されたレーダ装置60-1は、縦続接続された送受信部61-1、信号処理部62-1および指示装置63-1に併せて、これらの送受信部61-1、信号処理部62-1および指示装置63-1の制御端子にそれぞれ接続された入出力ポートを有する制御部64から構成される。
【0004】
また、船舶50-2には、上記レーダ装置60-1に代えてレーダ装置60-2が備えられる。このようなレーダ装置60-2の構成については、上記レーダ装置60-1の構成と同じであるので、以下では、機能および構成が同じ構成要素に添え番号「1」に代わる添え番号「2」が付加された同じ符号を付与し、ここでは、その説明を省略する。
なお、以下では、レーダ60-1、60-2の双方に共通の事項については、上記添え番号「1」、「2」の何れにも該当し得ることを意味する添え文字「c」を該当する構成要素の符号に付加して記述する。
【0005】
レーダ装置60-cでは、送受信部61-cは、制御部64-cの配下で所定の送信波を送信し、その送信波が船舶50-cや半島40等の物標で反射することによって到来した反射波を受信して信号処理部62-cに引き渡す。
【0006】
信号処理部62-cは、制御部64-cの配下で上記反射波に所定のレーダ信号処理を施すことにより、画像情報を生成する。
【0007】
指示装置63-cは、このような画像情報をPPI(Plan Position Indicator)等の指示方式に適合した視覚情報に変換し、表示画面(図示されない。)を介してその視覚情報を出力する。
【0008】
なお、本発明に関連した先行技術としては、以下に列記する特許文献1および特許文献2があった。
(1) 「探知または測位を行うコア部と表示器とをそれぞれ少なくとも一つずつ備えた舶用機器のネットワークシステムであって、前記コア部は、探知領域内への探知信号の送受信により物体の探知を行い、探知データを生成する探知部、または、測位衛星からの信号を受信して、自船の測位を行う測位部を備え、前記表示器は、前記コア部で外部から受信した探知信号または測位信号から生成された探知データまたは測位データを表示する表示部と、前記コア部の動作環境を指定するコマンドデータを生成して送信する指示部とを備え、前記コア部と前記表示器とがネットワークでつながれ、それぞれの装置が互いに前記探知データまたは測位データおよびコマンドデータをネットワークを介して送受信する」ことにより、「ネットワークでつながれた複数の探知装置および測位装置と表示器との間でのデータ送受信を画像を劣化させることなく容易にし、複数の各探知および測位装置のコア部の動作環境および電源を表示器において行う」点に特徴がある舶用機器のネットワークシステム…特許文献1
【0009】
(2) 「レーダ装置の代わりに、小電力無線装置、GPS装置及びマイクロコンピュータの組みあわせにより、無線LANを形成させる。GPSの位置情報とネットワーク情報から衝突の判定を行う」ことにより、「レーダを設置できない小型船舶においても衝突を予防する」点に特徴がある航行援助装置…特許文献2
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2002−328159号公報
【特許文献2】特開平10−267686号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
ところで、上述した従来例では、船舶50-1の位置が半島40に近いほど、レーダ装置60-1(送信部61-1)によって送信された送信波の電力の大半がその半島40で反射し、あるいは減衰し得る。
【0012】
したがって、このような状態では、船舶50-1の位置に対して半島40の反対側にあり、その半島40に近い海域は、図6に「●」印で示すように、その海域に位置する目標(以下、「不感目標」という。)が指示装置63-1の表示画面上に表示され難くなり、レーダ装置60-1にとって実質的な「死角」となる場合が多かった。
【0013】
しかし、このような「死角」では、例えば、図6に一点鎖線の矢印で示すように、不感目標と船舶50-1とが共に半島40の突端部にほぼ同時に移動する場合には、その船舶50-1を操船する者は、衝突の危険性が刻々と高まっているにもかかわらず、このような不感目標を識別できない可能性があった。
【0014】
本発明は、構成が大幅に変更されることなく、至近点に位置する目標の裏に生じる死角を緩和または回避できる航法補完装置およびレーダ装置を提供することを目的とする。
【課題を解決するための手段】
【0015】
請求項1に記載の発明では、連係手段は、異なる位置で距離または位置の測定を個別に行う第一のレーダ装置と第二のレーダ装置との間における連係を通信路を介して行う。補完手段は、前記第一のレーダ装置および前記第二のレーダ装置の内、一方によって行われた測定の結果を他方によって行われた測定の結果で補完する。
【0016】
すなわち、第一(第二)のレーダ装置によって行われた距離または位置の測定の結果に含まれる死角の領域は、その第一(第二)のレーダ装置と異なる位置から行われ、かつ通信路を介して引き渡された距離または位置の測定の結果で補完される。
【0017】
請求項2に記載の発明では、距離または位置の測定を行うレーダ装置において、識別手段は、前記測定の結果の補完が行われるべききっかけ、または前記補完の対象を識別する。通知手段は、前記きっかけまたは前記補完の対象を前記レーダ装置と異なるレーダ装置に無線伝送する。
【0018】
すなわち、本発明に係るレーダ装置は、そのレーダ装置と異なる他のレーダ装置に対して、死角の補完に供され得る距離または位置の測定の結果の無線伝送による通知を要求することができる。
【0019】
請求項3に記載の発明では、距離または位置の測定を行うレーダ装置において、補完情報生成手段は、前記レーダ装置と異なる他のレーダ装置から無線伝送路された要求に応じて、前記測定の結果の補完に供される補完情報を生成する。伝送手段は、前記補完情報を前記他のレーダ装置に無線伝送する。
【0020】
すなわち、本発明に係るレーダ装置は、無線伝送路を介して連係する他のレーダ装置の死角の補完に供される。
【発明の効果】
【0021】
本発明が適用されたレーダ装置では、他のレーダが異なる位置で行う測距または測位との連係の下で、死角に位置する目標の識別が確度高く実現される。
【0022】
また、本発明に係るレーダと異なる他のレーダ装置は、測距や測位の結果を既述の死角の補完に供するレーダ装置が存在する場合に限って無線伝送路を介して通知することができる。
【0023】
さらに、本発明に係るレーダ装置は、他のレーダ装置によって行われる測距や測位置の精度の向上に活用される。
【0024】
したがって、本発明が適用されたレーダ装置が備えられたサイトや移動体では、大幅なコスト高や構成の複雑化を伴うことなく、測距や測位の精度が安定に高く確保され、このような測距や測位に基づく航行の安全性が高められる。
【図面の簡単な説明】
【0025】
【図1】本発明の一実施形態を示す図である。
【図2】本実施形態の動作フローチャート(1) である。
【図3】本実施形態の動作フローチャート(2) である。
【図4】本実施形態の動作を説明する図である。
【図5】従来のレーダ装置の構成例を示す図である。
【図6】従来例の課題を説明する図である。
【発明を実施するための形態】
【0026】
以下、図面に基づいて本発明の実施形態について詳細に説明する。
図1は、本発明の一実施形態を示す図である。
図において、図5に示すものと機能および構成が同じ構成要素については、同じ符号を付与して示し、ここでは、その説明を省略する。
【0027】
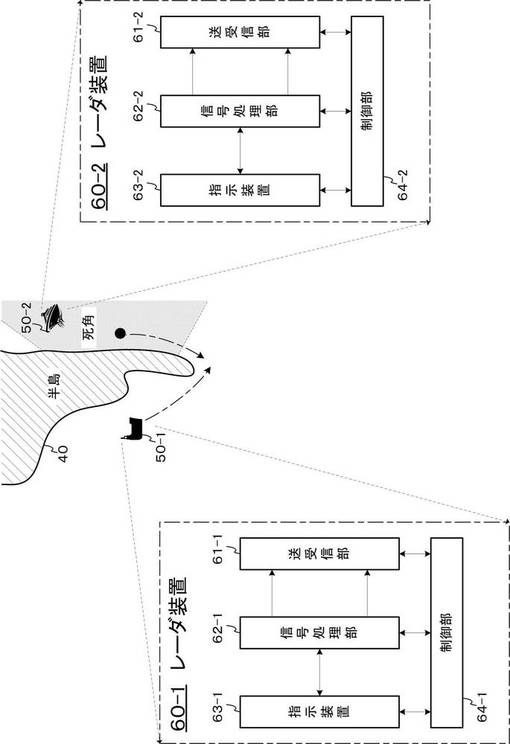
本実施形態と図5に示す従来例との構成の相違点は、レーダ装置10-1、10-2が、レーダ装置60-1、60-2に代えてそれぞれ搭載され、かつ以下の通りに構成された点にある。
【0028】
レーダ装置10-1の構成は、以下の点で、図5に示すレーダ装置60-1の構成と異なる。
(1) 信号処理部62-1に代えて信号処理部11-1が備えられる。
(2) 制御部64-1に代えて制御部12-1が備えられる。
(3) 制御部12-1の特定の入出力ポートに無線部13-1が接続され、その無線部13-1のアンテナ端子にアンテナ14-1の給電点が接続される。
(4) 制御部12-1の入出力ポートに、図示されないGPS受信機の制御端子が接続される。
【0029】
なお、レーダ装置10-2の構成については、レーダ装置10-1の構成と同じであるので、以下では、機能および構成が同じ構成要素に添え番号「1」に代わる添え番号「2」が付加された同じ符号を付与して示し、ここでは、その説明を省略する。
【0030】
また、以下では、レーダ10-1、10-2の双方に共通の事項については、上記笛番号「1」、「2」の何れにも該当し得ることを意味する添え文字「c」を該当する構成要素の符号に付加して記述する。
【0031】
図2は、本実施形態の動作フローチャート(1) である。
図3は、本実施形態の動作フローチャート(2) である。
図4は、本実施形態の動作を説明する図である。
以下、図1〜図4を参照して本実施形態の動作を説明する。
【0032】
レーダ装置10-cでは、船舶50-cの回りに位置する目標の測位は、信号処理部11-cおよび制御部12-cが図5に示す信号処理部62-cおよび制御部64-cとしてそれぞれ機能することにより、後述する点を除いて、従来例と同様にして行われる。
【0033】
本発明の特徴は、本実施形態では、レーダ装置10-cにおいて制御部12-cの配下で信号処理部11-cおよび無線部13-cが以下の通りに行う連係と、その連係の過程で制御部12-cが行う処理の手順とにある。
【0034】
レーダ装置10-1では、信号処理部11-1は、上記連係の下で従来例における信号処理部62-1と同様にして既述の画像情報を生成し、このような画像情報の列を時系列の順に所定の期間に亘ってファーストイン・ファーストアウト方式の記憶領域に蓄積する。なお、このような画像情報には、その画像情報で示される領域の全域および所望の部位や箇所を緯度および経度に基づいて特定可能な「座標情報」が含まれる。
【0035】
指示装置63-1の表示画面上には、上記連係の下で既述の画像情報が変換されることによって生成された視覚情報がPPIとして出力される。
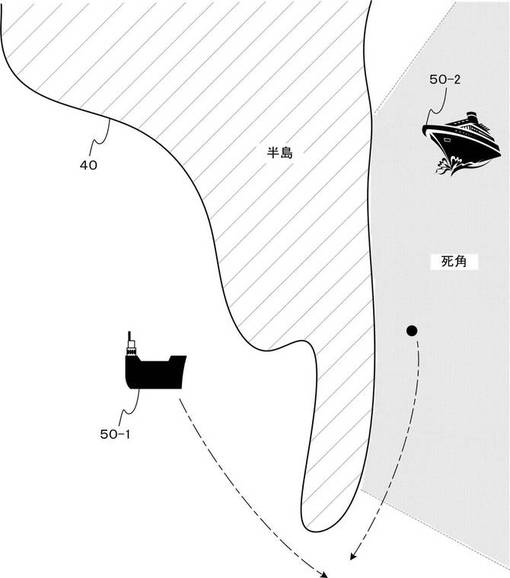
このようなPPI上では、指示装置63-1の操作者は、船舶50-1の至近距離に位置する半島40の裏側の海域の内、例えば、図1にハンチングを付して示すように、既述の死角となる可能性がある領域を目視により識別可能である。
【0036】
操作者は、上記領域を識別すると、表示画面上における位置の特定に供されるポインティングデバイス(タッチパネルであってもよい。)を介して、該当する領域の外枠を3つ以上の点として指定する。
【0037】
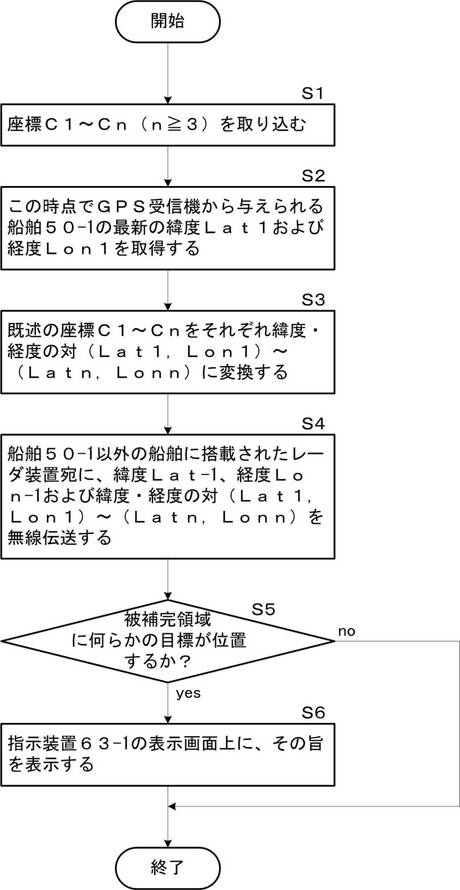
制御部12-1は、以下の処理を行う。
(1) 指示装置63-1を介してこのような3つ以上の点を示す座標C1〜Cn(n≧3)を取り込む(図2ステップS1)。
(2) この時点でGPS受信機から与えられる船舶50-1の最新の緯度Lat1および経度Lon1を取得する(図2ステップS2)。
【0038】
(3) 指示装置63-1によってPPIの表示が行われているレンジR-1と、上記緯度Lat-1および経度Lon-1とに基づいて、既述の座標C1〜Cnをそれぞれ緯度・経度の対(Lat1,Lon1)〜(Latn,Lonn)に変換する(図2ステップS3)。
(4) 無線部13-1およびアンテナ14-1を介して、船舶50-1以外の船舶に搭載されたレーダ装置宛に、上記緯度Lat-1、経度Lon-1および緯度・経度の対(Lat1,Lon1)〜(Latn,Lonn)を無線伝送する(図2ステップS4、図4(1))。
【0039】
一方、レーダ装置10-2では、制御部12-2は、以下の処理を行う。
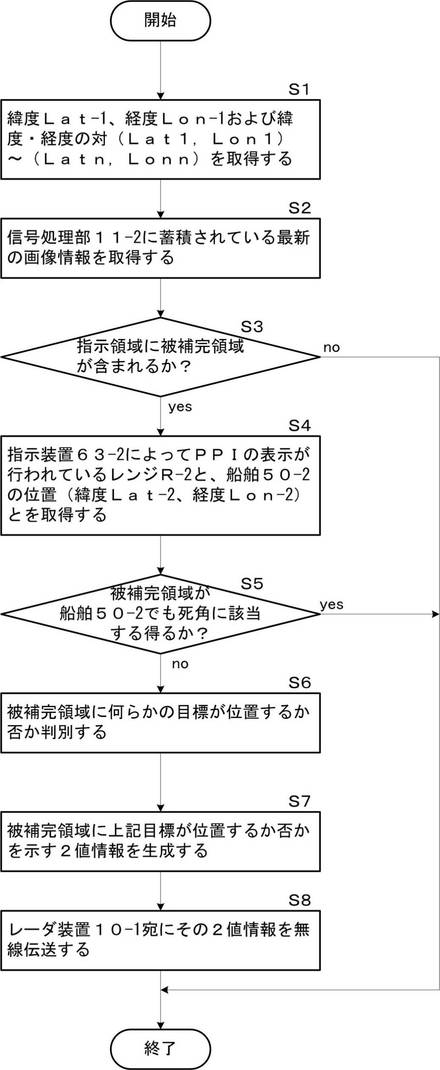
(1) アンテナ14-2および無線部13-2を介して上記緯度Lat-1、経度Lon-1および緯度・経度の対(Lat1,Lon1)〜(Latn,Lonn)を取得する(図3ステップS1、図4(2))。
(2) 信号処理部11-2に蓄積されている最新の画像情報を取得する(図3ステップS2)。
【0040】
(3) その画像情報に含まれる座標情報で示される領域(以下、「指示領域」という。)に、上記緯度・経度の対(Lat1,Lon1)〜(Latn,Lonn)で示される領域(以下、「被補完領域」という。)が含まれるか否かを判別する(図3ステップS3)。
(4) 指示領域に被補完領域が含まれる場合には、指示装置63-2によってPPIの表示が行われているレンジR-2と、その時点においてGPS受信機から得られ、かつ船舶50-2の位置を示す緯度Lat-2、経度Lon-2とを取得する(図3ステップS4)。
【0041】
(5) これらのレンジR-2、緯度Lat-2および経度Lon-2に基づいて、上記被補完領域が船舶50-2でも死角に該当するか否かを判定する(図3ステップS5)。
(6) 被補完領域がこのような死角に該当しない場合には、上記最新の画像情報で示される被補完領域に何らかの目標(移動している目標のみに限定されてもよい。)が位置するか否かを判別する(図3ステップS6)。
【0042】
(7) 被補完領域に上記目標が位置するか否かを示す2値情報を生成し(図3ステップS7)、無線部13-2およびアンテナ14-2を介してレーダ装置10-1宛に、その2値情報を無線伝送する(図3ステップS8、図4(3))。
【0043】
レーダ装置10-1では、制御部12-1は、以下の処理を行う。
(1) アンテナ14-1および無線部13-1を介して上記無線伝送された2値情報を取り込み(図4(4))、その2値情報の論理値に基づいて被補完領域に何らかの目標が位置するか否かを判別し(図2ステップS5)、被補完領域にこのような目標が位置しない場合には、以下の処理を省略する。
【0044】
(2) 反対に、2値情報の論理値が「被補完領域に何らかの目標が位置する」ことを意味する場合には、信号処理部11-1と連係し、あるいは指示装置63-1と直接連係することにより、その指示装置63-1の表示画面上に、その旨を表示する(図2ステップS6、図4(5))。
【0045】
なお、このような表示の内容は、以下の形態のどのような組み合わせであってもよい。
(1) 表示画面上に追加される文字、図形、記号等の視覚情報
(2) 所定の表示属性(色、背景、キャプション等)に基づく被補完領域またはこれに対応する特定の領域の表示
【0046】
すなわち、本実施形態によれば、レーダ装置の基本的な構成が大幅に変更されないにもかかわらず、無線伝送路を介して連係する他のレーダ装置によって行われた測位の結果が「死角」の緩和や補完に供される。
【0047】
また、このような緩和や補完に供される測位の結果は、「被補完領域に上記目標が位置するか否かを示す2値情報」であるため情報量が極めて少なく、かつレーダ装置10-1(制御部12-1)とレーダ装置10-2との間に無線部13-1、アンテナ14-1、14-2および無線部13-2を介して形成される無線伝送路を介して引き渡される。
したがって、本実施形態に係るレーダ装置によれば、至近点に位置する物標等の裏に位置する目標を安価に確度高く識別できる。
【0048】
なお、本実施形態では、「被補完領域に何らかの目標が位置する」ことが指示装置63-1の表示画面上に即座に表示されているが、このような表示が行われるきっかけは、該当する目標の識別が遅れることに起因して航行の安全性が低下し、あるいは損なわれることが許容可能な限度においてどのように設定されてもよい。
【0049】
また、本実施形態では、「被補完領域に何らかの目標が位置するか否かを示す2値情報」は、既述の無線伝送路を介して連係するレーダ装置10-2(制御部12-2)のみから伝送されている。
【0050】
しかし、このように連係するレーダ装置(以下、「連係レーダ装置」という。)の数は複数であってもよく、これらの連係レーダ装置との連係は、例えば、以下の何れかの構成により実現されてもよい。
【0051】
(1) 無線伝送路が全ての連係レーダ装置に共通のチャネルとして構成され、このチャネルを介してレーダ装置10-1(制御部12-1)が主導的に行うポーリングの下で、個々の連係レーダ装置との連係が行われる。
【0052】
(2) 無線伝送路が全ての連係レーダ装置に共通のチャネルとして構成され、何れの連係レーダ装置との連係も、このチャネル上におけるコンテンション方式(例えば、「CSMA−CA方式」)により行われる。
【0053】
(3) 船舶50-1の周辺に位置し、かつ連係レーダ装置となり得るレーダ装置が搭載された個々の船舶(以下、「連係船舶」という。)と、これらの連係船舶との連係に用いることができるチャネル(以下、「連係用チャネル」という。)とが所定のデータベースから取得され、このようにして取得された個々の連係用チャネルを介して該当する連係レーダ装置との連係が行われる。
【0054】
さらに、本実施形態では、上記2値情報が複数の連係レーダ装置から与えられる場合には、「被補完領域に何らかの目標が位置する」ことを示す表示の要否は、以下の何れの形態で行われてもよい。
(1) 複数の連係レーダ装置から与えられた2値情報の論理積、または論理和の論理値に基づいて決定される。
【0055】
(2) 複数の連係レーダ装置から与えられた2値情報が所定の重み(例えば、送信元の連係レーダ毎の「アンテナ高の昇順」、「レンジの降順」等の値として付与される。)との積和と、所定の閾値との大小関係に基づいて決定される。
(3) 複数の連係レーダ装置から与えられた2値情報の多数決に基づいて決定される。
【0056】
なお、上記重みが「アンテナ高の昇順」に付与された場合には、海面反射等のクラッタ内に埋もれた物標の識別の確度が高められる。
【0057】
また、本実施形態では、2値情報は、警報音その他の音響信号として出力されてもよい。
さらに、並行して連係する連係レーダの数が複数である場合には、レーダ装置10-1と連係レーダ装置との間で相互に引き渡される情報に、送信元や宛先のレーダ装置の識別子が含まれることにより、連係の効率や確実性の確保が図られてもよい。
【0058】
また、無線部13-cと連係レーダ装置との間には、以下の項目に適した如何なる変復調方式、多元接続方式、ゾーン構成およびチャネル配置に基づいて無線伝送路が形成されてもよい。
(1) この無線伝送路を介する連係の形態
(2) その連係の過程で引き渡されるべき情報の内容、形式および情報量
(3) 連係レーダ装置の(最大の)台数
【0059】
さらに、このような無線伝送路を介する2値情報等の伝送情報の伝送は、例えば、漁場監視等の特定の業務に供される船舶に搭載されたレーダ装置のみが連係レーダ装置として機能するべき場合には、暗号化技術等が適用されることによって秘匿性が確保されてもよい。
【0060】
また、上記無線伝送路の伝送速度および変復調方式は、連係レーダ装置との間に確保され得る伝送速度が広範にあるいは多様に異なる可能性がある場合には、例えば、個々の連係レーダ装置との間に形成される無線伝送路のチャネル推定の過程で段階的に変更されてもよい。
【0061】
さらに、本実施形態では、レーダ装置10-2は、通常の測位に供される信号処理部11-2が併用されることによって、連係レーダ装置として機能している。
【0062】
しかし、連係レーダ装置(レーダ装置10-2を含む。)の全てまたは一部は、通常の測位に供される信号処理と並行して実行される別の信号処理として既述の処理が行われることによって、レンジの設定に制約を伴わないレーダ装置として構成されてもよい。なお、このような別の信号処理は、信号処理部11-2の余剰の処理量を活用して行われ、あるいはこの信号処理部11-2の他に増設された異なる信号処理部によって行われてもよい。
【0063】
また、本実施形態では、連係レーダ装置(レーダ装置10-2を含む。)からレーダ装置10-1宛に無線伝送され、かつ指示装置63-1の表示画面上に表示される情報は、既述の「2値情報」に限定されず、連係レーダ装置によって識別される以下の情報の如何なる組み合わせであってもよい。
【0064】
(1) 被補完領域にある目標毎の位置(または地理的な分布)の列
(2) 被補完領域にある目標の内、移動している目標毎の速度(および移動方向)の列
(3) 被補完領域の外側に位置し、かつ被補完領域内に位置する可能性が高い目標毎の位置(または地理的な分布)の列
(4) 被補完領域の外側に位置し、かつ被補完領域内に位置する可能性が高い目標毎の速度(および移動方向)の列
【0065】
なお、上記(1)〜(4)項は、制御部12-1の配下で(信号処理部11-1が連係して)指示装置63-1の指示画面上に以下の何れの形態で表示されてもよい。
【0066】
(1) 指示画面上に文字、図形、記号等として重畳される表示
(2) 指示画面上に文字、図形、記号等として重畳される概要表示
(3) 指示画面上に地理的に重畳される表示
(4) 指示画面上に地理的に重畳される概要表示
【0067】
上記概要表示については、ポインティングデバイス等で指定されている期間に、もしくは指定されたときに、対応する詳細な表示で代替され、または対応する詳細な表示が付加されて表示される。ただし、詳細な表示は、地理的に重畳された表示でなくてもよく、文字情報等として別途付加されてもよい。
【0068】
さらに、本実施形態では、連係レーダ装置(レーダ装置10-2を含む。)からレーダ装置10-1宛に無線伝送され、かつ指示装置63-1の表示画面上に表示される情報については、上述したように指示画面上に地理的に重畳される場合には、レーダ装置10-1と連係レーダ装置(レーダ装置10-2を含む。)と何れか一方によって行われる処理、あるいは双方の連係による分散処理として、これらのレーダ装置の間における位置やレンジの相違を吸収するマッピングが施されてもよい。
【0069】
また、本実施例では、レーダ装置10-1と連係レーダ装置(レーダ装置10-2を含む。)との間における無線伝送路の伝搬所要時間と、この無線伝送路を介して連係レーダ装置との連係のために制御部12-1と、連係レーダ装置に備えられた制御部(制御部12-2を含む。)とによって行われる処理の演算所要時間が無視できない程度に長い場合には、例えば、以下に列記する通りにレーダ装置10-1と連係レーダ装置とが連係することにより、両者の間における同期が図られてもよい。
【0070】
(1) 制御部12-1は、船舶50-1以外の船舶に搭載されたレーダ装置宛に無線伝送される緯度Lat-1、経度Lon-1および緯度・経度の対(Lat1,Lon1)〜(Latn,Lonn)に、絶対時刻(または、これに代わる計数値等であってもよい。)を付加する。
【0071】
(2) 連係レーダ装置に備えられた制御部(制御部12-2を含む。)は、レーダ装置10-1宛に無線伝送する2値情報に、上記絶対時刻を付加する。
【0072】
(3) 制御部12-1は、信号処理部11-1と連係し、あるいは指示装置63-1と直接連係することにより、その指示装置63-1の表示画面上に上記2値情報を反映させる際には、上記絶対時刻の偏差が所定の閾値未満であることを確認してその反映の可否を判定する。
【0073】
さらに、本実施形態では、レーダ装置10-1、10-2は、それぞれ船舶50-1、50-2に備えられ、これらの船舶50-1、50-2と共に移動し得る。
しかし、このようなレーダ装置10-1、10-2は、船舶に限定されず、車両、航空機その他の多様な移動体に搭載されてもよく、あるいは一定の地点に設置されてもよい。
【0074】
また、本実施形態では、無線部13-1、13-2およびアンテナ14-1、14-2を介して形成される無線伝送路の伝送容量が十分に高い場合には、連係レーダ装置(レーダ装置10-2を含む。)からレーダ装置10-1に引き渡される情報は、既述の2値情報に限定されず、例えば、その2値情報を生成するために連係レーダにおいて参照されたレーダ信号や画像情報、またはこれらのレーダ信号や画像情報に所定の処理が施されることによって得られた情報がレーダ装置10-1宛に直接無線伝送され、このような画像情報に基づいて2値情報を生成する処理が制御部12-1によって行われてもよい。
【0075】
さらに、本発明は、死角に位置する目標の有無だけではなく、例えば、以下に列記するように、自動衝突予防援助装置(ARPA:Automatic Radar Plotting Aids)による運動の解析と避航操船に必要な情報の提供との対象となる物標を安定に捕捉するためにも、適用可能である。
【0076】
(1) 船舶50-1(制御部12-1)は、上記捕捉の対象となる物標の位置を識別し、無線伝送路を介して周辺に位置する連係船舶(連係レーダ装置)にその位置を通知する。
【0077】
(2) 連係船舶(連係レーダ装置)は、このようにして通知された位置にある物標を識別し、その物標の捕捉に必要な所定の情報を収集し、上記無線伝送路を介して船舶50-1(制御部12-1)に引き渡す。
【0078】
(3) 船舶50-1(制御部12-1)は、レーダ装置10-1で上記物標を識別できないとき、あるいはできない状況(操作者によって判断されてもよい。)には、このようにして引き渡された情報に基づいてその物標を識別し、運動の解析や避航操船に必要な情報を生成する。
【0079】
また、本発明では、「何らかの目標が位置するか否か」の判断の対象は被補完領域の全体でなくてもよく、例えば、被補完領域が区分されてなるセル毎に同様の判断が行われるべき場合にも、以下のように適用可能である。
【0080】
(1) 船舶50-1(制御部12-1)は、(必要であれば、)無線伝送路を介して連係船舶(連係レーダ装置)に上記セルのサイズを通知する。
【0081】
(2) 連係船舶(連係レーダ装置)は、このようにして通知されたサイズで被補完領域が区分されてなるセル毎に、既述の判定を行い、該当するセルの識別子(座標等であってもよい。)と共にその判定の結果を示す2値情報を生成し、何れも、上記無線伝送路を介して船舶50-1(制御部12-1)に引き渡す。
【0082】
(3) 船舶50-1(制御部12-1)は、このようにして引き渡された2値情報および識別子の対毎に、既述の処理を行う。
【0083】
さらに、本実施形態では、船舶50-1(レーダ装置10-1)は、死角の緩和や補完のために連係すべき連係船舶(連係レーダ装置)に対して、緯度Lat-1、経度Lon-1および緯度・経度の対(Lat1,Lon1)〜(Latn,Lonn)を無線伝送している。
【0084】
しかし、このような連係船舶(連係レーダ装置)との連係のきっかけは、以下に列記する項目、もしくはこれらの項目の如何なる組み合わせであってもよく、またはこのような連係が個々の連係船舶(連係レーダ装置)によって自発的に行われる場合には無くてもよい。
【0085】
(1) 予め決められた周期または頻度で与えられる時刻
(2) 操作者によって行われた所定の操作
(3) レーダ装置10-1によって識別された所定の事象(死角の発生(可能性)を直接または間欠的に示す。)
【0086】
また、船舶50-1(レーダ装置10-1)から船舶50-2(レーダ装置10-2)に無線伝送される情報は、上記緯度Lat-1、経度Lon-1および緯度・経度の対(Lat1,Lon1)〜(Latn,Lonn)に限定されず、例えば、以下に列記する項目、またはこれらの項目の如何なる組み合わせであってもよい。
【0087】
(1) 船舶50-1の存在(緯度・経度等の位置を含まない。)
(2) 指示装置63-1による指示が行われているレンジ
(3) 補完対象領域に該当する地域の識別子
【0088】
(4) レーダ装置10-1によって測位が行われるべき地域(指示方式に適した座標等として与えられる。)
(5) STC(Sensitivity-Time Control)、FTC(Fast Time Constant)、CFAR(Constant False Alarm Rate)、MTI(Moving Target Induction)等のように信号処理部11-1によって行われている(行われるべき)信号処理の形態
【0089】
さらに、本実施形態では、レーダ装置10-2(連係レーダ装置)は、無線伝送路を介してレーダ装置10-1から緯度Lat-1、経度Lon-1および緯度・経度の対(Lat1,Lon1)〜(Latn,Lonn)が引き渡されると、速やかに既述の2値情報をレーダ装置10-1宛に無線伝送している。
【0090】
しかし、このような無線伝送が行われるきっかけは、以下に列記する項目、またはこれらの項目の如何なる組み合わせであってもよい。
(1) 先行して与えられ、あるいは識別され、かつレーダ装置10-1との連係が開始されるべき時点を基準として予め決められた周期(頻度)で与えられる時刻
(2) 操作者によって行われる所定の操作
(3) レーダ装置10-2によって識別された所定の事象
【0091】
また、船舶50-2(レーダ装置10-2)から船舶50-1(レーダ装置10-1)に無線伝送される情報は、既述の2値情報に限定されず、例えば、以下に列記する項目、またはこれらの項目の如何なる組み合わせであってもよい。
【0092】
(1) 被補完領域に位置する目標の位置
(2) 被補完領域において上記目標が位置する地域の識別子
(3) 被補完領域に位置する目標の速度および移動方向
【0093】
(4) 被補完領域に位置する可能性がある目標に関する所望の情報
(5) 被補完領域(または既述のセル)に関して信号処理部11-1によって所定の信号処理が施されるべきレーダ信号
(6) 船舶50-2(レーダ装置10-2)との位置やレンジの相違を吸収するマッピングが施され、かつ被補完領域(または既述のセル)に関して信号処理部11-1によって所定の信号処理が施されるべきレーダ信号
【0094】
さらに、レーダ装置10-1、10-2の連係の過程で行われる処理は、如何なる形態による機能分散や負荷分散の下で実現されてもよい。
【0095】
また、本発明の特徴的な処理を行うために連係する信号処理部11-1、制御部12-1、無線部13-1、13-2、制御部12-2および信号処理部11-2は、既述の通りにレーダ装置10-1、10-2に組み込まれなくてもよく、例えば、これらのレーダ装置10-1、10-2に該当する既存のレーダ装置に付加されることによって、同様の機能を実現する付加装置として構成されてもよい。
【0096】
さらに、本発明が適用されるレーダ装置10-1、10-2のレーダ方式は、必ずしも同じでなくてもよく、かつ如何なるものであってもよい。
【0097】
また、本発明が適用されるレーダ装置10-1、10-2の指示方式は、必ずしも同じでなくてもよく、かつ如何なるものであってもよい。
【0098】
さらに、本発明は、レーダ装置10-1、10-2は、スキャン方向やスイープ方向における目標の分布や位置の計測に供されるレーダ装置に限定されず、例えば、接岸距離系や電波高度計のように、距離のみの計測に供されるレーダ装置にも同様に適用可能である。
【0099】
また、本発明は、上述した実施形態に限定されず、本発明の範囲において多様な実施形態の構成が可能であり、構成要素の全てまたは一部に如何なる改良が施されてもよい。
【0100】
以下、本願に開示された発明の内、特許請求の範囲に記載しなかった発明を整理し、「特許請求の範囲」および「課題を解決するための手段」の欄の記載に準じた様式により列記する。
【0101】
[請求項4] 請求項1に記載の航法補完装置において、
前記連係手段は、
前記第一のレーダ装置と前記第二のレーダ装置との双方または何れか一方に同期して前記連係を行う
ことを特徴とする航法補完装置。
【0102】
このような構成の航法補完装置では、請求項1に記載の航法補完装置において、前記連係手段は、前記第一のレーダ装置と前記第二のレーダ装置との双方または何れか一方に同期して前記連係を行う。
【0103】
すなわち、第一のレーダ装置と第二のレーダ装置とは、何れも、一方の内部で発生した所定の事象、あるいは他方の状態や振る舞いに応じて定まるきっかけで、上記連係を実現する。
【0104】
したがって、これらのレーダ装置の間における連係は、密接に、あるいは精度よく実現される。
【0105】
[請求項5] 請求項1または請求項4に記載の航法補完装置において、
前記第一のレーダ装置と前記第二のレーダ装置との双方に分散されて付加され、または組み込まれた
ことを特徴とする航法補完装置。
【0106】
このような構成の航法補完装置では、請求項1または請求項4に記載の航法補完装置は、前記第一のレーダ装置と前記第二のレーダ装置との双方に分散されて付加され、または組み込まれる。
【0107】
すなわち、本発明に係る航法補完装置は、第一のレーダ装置と第二のレーダ装置との間における機能分散や負荷分散の形態に適した構成のユニットやパッケージとして、これらのレーダ装置に付加され、あるいは備えられる。
【0108】
したがって、本発明は、レーダ装置の基本的な構成が大幅に変更されることなく、多様な態様による実現が可能となる。
【0109】
[請求項6] 請求項1、4、5の何れか1項に記載の航法補完装置において、
前記通信路は、
無線通信路である
ことを特徴とする航法補完装置。
【0110】
このような構成の航法補完装置では、請求項1、4、5の何れか1項に記載の航法補完装置において、前記通信路は、無線通信路である。
【0111】
すなわち、第一のレーダ装置と第二のレーダ装置との連係は、これらのレーダ装置の位置が地理的に大きく隔たり、あるいは両者の間における通信路が有線伝送路として敷設できない場合であっても、実現される。
【0112】
したがって、多様な位置にある複数のレーダ装置との連係の下で、既述の死角にかかわる測距や測位の補完が実現可能となる。
【0113】
[請求項7] 請求項2に記載のレーダ装置において、
前記きっかけには、
前記レーダの存在が含まれる
ことを特徴とするレーダ装置。
【0114】
このような構成のレーダ装置では、請求項2に記載のレーダ装置において、前記きっかけには、前記レーダの存在が含まれる。
【0115】
すなわち、本発明に係るレーダ装置と連係することにより死角にかかわる測距や測位の結果の補完を可能とする他のレーダ装置は、その連係の相手が少なくとも1つ存在することを確認することなく無用な連係を試行する必要がなくなる。
【0116】
したがって、本発明に係るレーダ装置と連係する他のレーダ装置は、既述の相手がいないにもかかわらず上記連係を試行することに起因する資源の無駄な消費を回避することができる。
【0117】
[請求項8] 請求項2に記載のレーダ装置において、
前記きっかけには、
前記レーダの位置が含まれる
ことを特徴とするレーダ装置。
【0118】
このような構成のレーダ装置では、請求項2に記載のレーダ装置において、前記きっかけには、前記レーダの位置が含まれる。
【0119】
すなわち、本発明に係るレーダ装置の死角は、そのレーダ装置の位置を前提として他のレーダ装置によって行われた測距や測位の結果で補完される。
【0120】
したがって、このような死角の補完は、上記他のレーダ装置が本発明に係るレーダ装置の位置を把握することなく行われる場合に比べて、効率的に、精度よく実現される。
【0121】
[請求項9] 請求項2に記載のレーダ装置において、
前記補完の対象は、
前記補完が行われるべき地理的な位置である
ことを特徴とするレーダ装置。
【0122】
このような構成のレーダ装置では、請求項2に記載のレーダ装置において、前記補完の対象は、前記補完が行われるべき地理的な位置である。
【0123】
すなわち、本発明に係るレーダ装置の死角は、その死角の補完が行われるべき地理的な位置を前提として他のレーダ装置によって行われた測距や測位の結果で補完される。
【0124】
したがって、このような死角の補完は、上記他のレーダ装置が既述の地理的な領域を把握することなく行われる場合に比べて、効率的に、精度よく実現される。
【0125】
[請求項10] 請求項2に記載のレーダ装置において、
前記補完の対象は、
前記補完が行われるべき地域である
ことを特徴とするレーダ装置。
【0126】
このような構成のレーダ装置では、請求項2に記載のレーダ装置において、前記補完の対象は、前記補完が行われるべき地域である。
【0127】
すなわち、本発明に係るレーダ装置の死角は、その死角の補完が行われるべき地域を前提として他のレーダ装置によって行われた測距や測位の結果で補完される。
【0128】
したがって、このような死角の補完は、上記他のレーダ装置が既述の地域を把握することなく行われる場合に比べて、効率的に、精度よく実現される。
【0129】
[請求項11] 請求項2に記載のレーダ装置において、
前記きっかけまたは前記補完の対象に、
前記レーダによって前記測定が行われるレンジが含まれる
ことを特徴とするレーダ装置。
【0130】
このような構成のレーダ装置では、請求項2に記載のレーダ装置において、前記きっかけまたは前記補完の対象に、前記レーダによって前記測定が行われるレンジが含まれる。
【0131】
すなわち、本発明に係るレーダ装置の死角は、その死角の補完が行われるべきレンジを前提として他のレーダ装置によって行われた測定の結果で補完される。
【0132】
したがって、このような死角の補完は、上記他のレーダ装置が既述のレンジを把握することなく行われる場合に比べて、効率的に、精度よく実現される。
【0133】
[請求項12] 請求項2に記載のレーダ装置において、
前記きっかけまたは前記補完の対象に、
前記レーダによって前記測定が行われる地域が含まれる
ことを特徴とするレーダ装置。
【0134】
このような構成のレーダ装置では、請求項2に記載のレーダ装置において、前記きっかけまたは前記補完の対象に、前記レーダによって前記測定が行われる地域が含まれる。
【0135】
すなわち、本発明に係るレーダ装置の死角は、そのレーダによって測距または測位が行われる地域(死角が含まれる。)を前提として他のレーダ装置によって行われた測距や測位の結果で補完される。
【0136】
したがって、このような死角の補完は、上記他のレーダ装置が既述の地域を把握することなく行われる場合に比べて、効率的に、精度よく実現される。
【0137】
[請求項13] 請求項2に記載のレーダ装置において、
前記きっかけまたは前記補完の対象に、
前記レーダ装置によって行われ、かつ前記測定に供される信号処理の形態が含まれる
ことを特徴とするレーダ装置。
【0138】
このような構成のレーダ装置では、請求項2に記載のレーダ装置において、前記きっかけまたは前記補完の対象に、前記レーダ装置によって行われ、かつ前記測定に供される信号処理の形態が含まれる。
【0139】
すなわち、本発明に係るレーダ装置の死角は、そのレーダ装置が測距や測位のために行う信号処理の形態を前提として他のレーダ装置によって行われた測距や測位の結果で補完される。
【0140】
したがって、このような死角の補完は、上記他のレーダ装置が既述の信号処理の形態を把握することなく行われる場合に比べて、効率的に、精度よく実現される。
【0141】
[請求項14] 請求項2、7、8、9、10、11、12、13の何れか1項に記載のレーダ装置において、
前記測定の結果に、前記レーダ装置と異なるレーダ装置から通知された特定の目標の存在を付加する補完手段を備えた
ことを特徴とするレーダ装置。
【0142】
このような構成のレーダ装置では、請求項2、7、8、9、10、11、12、13の何れか1項に記載のレーダ装置において、補完手段は、前記測定の結果に、前記レーダ装置と異なるレーダ装置から通知された特定の目標の存在を付加する。
【0143】
すなわち、本発明に係るレーダ装置では、そのレーダによって行われた測距や測位の結果が基本的に変更が加えられることなく、他のレーダ装置との連係の下で、死角における特定の目標の存在の識別が可能となる。
【0144】
したがって、本発明に係るレーダ装置は、死角が簡便に補完される。
【0145】
[請求項15] 請求項2、7、8、9、10、11、12、13の何れか1項に記載のレーダ装置において、
前記測定の結果に、前記レーダ装置と異なるレーダ装置から通知された特定の目標の所在の反映を図る補完手段を備えた
ことを特徴とするレーダ装置。
【0146】
このような構成のレーダ装置では、請求項2、7、8、9、10、11、12、13の何れか1項に記載のレーダ装置において、補完手段は、前記測定の結果に、前記レーダ装置と異なるレーダ装置から通知された特定の目標の所在の反映を図る。
【0147】
すなわち、本発明に係るレーダ装置では、死角における特定の目標の存在が他のレーダ装置との連係の下で識別され、かつ測距や測位の結果に反映される。
【0148】
したがって、本発明に係るレーダ装置は、測距や測位を実現する処理の過程で死角の補完が図られる。
【0149】
[請求項16] 請求項2、7、8、9、10、11、12、13の何れか1項に記載のレーダ装置において、
前記測定の結果に、前記レーダ装置と異なるレーダ装置から通知された特定の目標の所在および速度の反映を図る補完手段を備えた
ことを特徴とするレーダ装置。
【0150】
このような構成のレーダ装置では、請求項2、7、8、9、10、11、12、13の何れか1項に記載のレーダ装置において、補完手段は、前記測定の結果に、前記レーダ装置と異なるレーダ装置から通知された特定の目標の所在および速度の反映を図る。
【0151】
すなわち、本発明に係るレーダ装置では、死角における特定の目標の存在と速度とが他のレーダ装置との連係の下で識別され、かつ測定の結果に反映される。
【0152】
したがって、本発明に係るレーダ装置は、測距や測位を実現する処理の過程で死角の補完が図られる。
【0153】
[請求項17] 請求項2、7、8、9、10、11、12、13の何れか1項に記載のレーダ装置において、
前記測定の結果に、前記レーダ装置と異なるレーダ装置から通知された特定の目標の所在、速度および移動方向の反映を図る補完手段を備えた
ことを特徴とするレーダ装置。
【0154】
このような構成のレーダ装置では、請求項2、7、8、9、10、11、12、13の何れか1項に記載のレーダ装置において、補完手段は、前記測定の結果に、前記レーダ装置と異なるレーダ装置から通知された特定の目標の所在、速度および移動方向の反映を図る。
【0155】
すなわち、本発明に係るレーダ装置では、死角における特定の目標の存在と速度と移動方向が他のレーダ装置との連係の下で識別され、かつ測距や測位の結果に反映される。
【0156】
したがって、本発明に係るレーダ装置は、測距や測位を実現する処理の過程で死角の補完が図られる。
【0157】
[請求項18] 請求項2、7、8、9、10、11、12、13の何れか1項に記載のレーダ装置において、
前記測定の結果に、前記レーダ装置と異なるレーダ装置から通知され、かつ前記結果に対する反映の対象となり得る特定の目標の存在の反映を図る補完手段を備えた
ことを特徴とするレーダ装置。
【0158】
このような構成のレーダ装置では、請求項2、7、8、9、10、11、12、13の何れか1項に記載のレーダ装置において、補完手段は、前記測距または前記測位の結果に、前記レーダ装置と異なるレーダ装置から通知され、かつ前記結果に対する反映の対象となり得る特定の目標の存在の反映を図る。
【0159】
すなわち、本発明に係るレーダ装置では、やがて死角に位置し得る特定の目標の存在が他のレーダ装置との連係の下で識別され、かつ測定の結果に反映される。
【0160】
したがって、本発明に係るレーダ装置は、死角に位置し得る目標を予め把握して運用することが可能となる。
【0161】
[請求項19] 請求項14ないし請求項18の何れか1項に記載のレーダ装置において、
前記補完手段は、
前記測定を実現するレーダ信号処理により前記反映を図る
ことを特徴とするレーダ装置。
このような構成のレーダ装置では、請求項14ないし請求項18の何れか1項に記載のレーダ装置において、前記補完手段は、前記測定を実現するレーダ信号処理により前記反映を図る。
【0162】
すなわち、他のレーダ装置との連係の下で行われる死角の補完は、上記レーダ信号処理の過程で図られる。
【0163】
したがって、上記死角の補完は、指示装置によって出力される画像情報に施される処理の過程で行われるより、所望の指示方式や仕様に柔軟に適応した形態で実現される。
【0164】
[請求項20] 請求項14ないし請求項18の何れか1項に記載のレーダ装置において、
前記補完手段は、
前記測定の結果を指示する画像処理により前記反映を図る
ことを特徴とするレーダ装置。
【0165】
このような構成のレーダ装置では、請求項14ないし請求項18の何れか1項に記載のレーダ装置において、前記補完手段は、前記測定の結果を指示する画像処理により前記反映を図る。
【0166】
すなわち、他のレーダ装置との連係の下で行われる死角の補完は、レーダ信号処理の過程で行われる処理に比べて、一般に、処理量および演算対象の情報量が少ない画像処理の過程で図られる。
【0167】
したがって、上記死角の補完は、所望の指示方式や仕様に適する範囲において効率的に、かつ安価に実現される。
【0168】
[請求項21] 請求項3に記載のレーダ装置において、
前記補完情報は、
前記測定によって識別された特定の目標の存在である
ことを特徴とするレーダ装置。
このような構成のレーダ装置では、請求項3に記載のレーダ装置において、前記補完情報は、前記測定によって識別された特定の目標の存在である。
【0169】
すなわち、他のレーダ装置によれば、本発明に係るレーダ装置と無線伝送路を介して連係することにより、死角に上記特定の目標が存在することを識別可能となる。
【0170】
したがって、死角に関する測距または測位の補完が図られる。
【0171】
[請求項22] 請求項3に記載のレーダ装置において、
前記補完情報は、
前記測定によって識別された特定の目標の位置である
ことを特徴とするレーダ装置。
【0172】
このような構成のレーダ装置では、請求項3に記載のレーダ装置において、前記補完情報は、前記測定によって識別された特定の目標の位置である。
【0173】
すなわち、他のレーダ装置では、本発明に係るレーダ装置と無線伝送路を介して連係することにより、死角における上記特定の目標の位置を識別可能となる。
【0174】
したがって、死角に関する測距または測位の補完が図られる。
【0175】
[請求項23] 請求項3に記載のレーダ装置において、
前記補完情報は、
前記測定によって識別された特定の目標が位置する地域である
ことを特徴とするレーダ装置。
【0176】
このような構成のレーダ装置では、請求項3に記載のレーダ装置において、前記補完情報は、前記測定によって識別された特定の目標が位置する地域である。
【0177】
すなわち、他のレーダ装置では、本発明に係るレーダ装置と無線伝送路を介して連係することにより、上記特定の目標が位置する地域に死角が該当するか否かを識別可能となる。
【0178】
したがって、死角に関する測距または測位の補完が図られる。
【0179】
[請求項24] 請求項3に記載のレーダ装置において、
前記補完情報は、
前記測定によって識別された特定の目標の速度または速度ベクトルである
ことを特徴とするレーダ装置。
【0180】
このような構成のレーダ装置では、請求項3に記載のレーダ装置において、前記補完情報は、前記測定によって識別された特定の目標の速度または速度ベクトルである。
【0181】
すなわち、他のレーダ装置では、本発明に係るレーダ装置と無線伝送路を介して連係することにより、死角に位置する特定の目標の速度または速度ベクトルを識別可能となる。
【0182】
したがって、死角に関する測距または測位の補完が図られる。
【0183】
[請求項25] 請求項3に記載のレーダ装置において、
前記補完情報は、
前記測定によって識別され、かつ前記他のレーダ装置によって行われた測距または測位の結果の補完に供され得る目標の候補である
ことを特徴とするレーダ装置。
【0184】
このような構成のレーダ装置では、請求項3に記載のレーダ装置において、前記補完情報は、前記測定によって識別され、かつ前記他のレーダ装置によって行われた測距または測位の結果の補完に供され得る目標の候補である。
【0185】
すなわち、他のレーダ装置では、本発明に係るレーダ装置と無線伝送路を介して連係することにより、死角に位置する可能性がある目標を識別できる。
【0186】
したがって、死角に関する測距または測位の円滑な補完が可能となる。
【0187】
[請求項26] 請求項3に記載のレーダ装置において、
前記補完情報は、
前記他のレーダ装置によって行われた測定の結果を補完する信号処理の対象となり得るレーダ信号である
ことを特徴とするレーダ装置。
【0188】
このような構成のレーダ装置では、請求項3に記載のレーダ装置において、前記補完情報は、前記他のレーダ装置によって行われた測定の結果を補完する信号処理の対象となり得るレーダ信号である。
【0189】
すなわち、他のレーダ装置では、本発明に係るレーダ装置から無線伝送路を介して引き渡されたレーダ信号に施される信号処理により、死角の補完を図る。
【0190】
したがって、死角に関する測距または測位の多様な形態による補完を柔軟に図ることが可能となる。
【0191】
[請求項27] 請求項26に記載のレーダ装置において、
前記レーダ信号には、
前記他のレーダ装置によって測定が行われる地域またはレンジとのマッピングが施された
ことを特徴とするレーダ装置。
【0192】
このような構成のレーダ装置では、請求項26に記載のレーダ装置において、前記レーダ信号には、前記他のレーダ装置によって測定が行われる地域またはレンジとのマッピングが施される。
【0193】
すなわち、上記他のレーダ装置が死角の補完のために行う信号処理の対象となるレーダ信号は、測定が行われる地域またはレンジとのマッピングが本発明に係るレーダ装置によって施されて与えられる。
【0194】
したがって、死角の補完のために行われる信号処理の処理量と、演算対象のサイズとの削減が図られる。
【符号の説明】
【0195】
10,60 レーダ装置
11,62 信号処理部
12,64 制御部
13 無線部
14 アンテナ
40 半島
50 船舶
61 送受信部
63 指示装置
【技術分野】
【0001】
本発明は、レーダ装置によって行われた測距または測位の結果を他のレーダ装置によって行われた測距または測位の結果で補完する航法補完装置と、その航法補完装置の機能を所定の機能分散の下で実現するレーダ装置とに関する。
【背景技術】
【0002】
近年、レーダ装置は、低廉化に併せて小型化が図られ、大型船や漁船だけではなく、レジャーボートのような小型の多様な船舶にも多く搭載されている。
【0003】
図5は、従来のレーダ装置の構成例を示す図である。
従来のレーダ装置は、例えば、図5に示すように、例えば、半島等の陸地40を挟んで隔たった2つの海域に位置する2つの船舶50-1、50-2の何れにも搭載され得る。
船舶50-1に搭載されたレーダ装置60-1は、縦続接続された送受信部61-1、信号処理部62-1および指示装置63-1に併せて、これらの送受信部61-1、信号処理部62-1および指示装置63-1の制御端子にそれぞれ接続された入出力ポートを有する制御部64から構成される。
【0004】
また、船舶50-2には、上記レーダ装置60-1に代えてレーダ装置60-2が備えられる。このようなレーダ装置60-2の構成については、上記レーダ装置60-1の構成と同じであるので、以下では、機能および構成が同じ構成要素に添え番号「1」に代わる添え番号「2」が付加された同じ符号を付与し、ここでは、その説明を省略する。
なお、以下では、レーダ60-1、60-2の双方に共通の事項については、上記添え番号「1」、「2」の何れにも該当し得ることを意味する添え文字「c」を該当する構成要素の符号に付加して記述する。
【0005】
レーダ装置60-cでは、送受信部61-cは、制御部64-cの配下で所定の送信波を送信し、その送信波が船舶50-cや半島40等の物標で反射することによって到来した反射波を受信して信号処理部62-cに引き渡す。
【0006】
信号処理部62-cは、制御部64-cの配下で上記反射波に所定のレーダ信号処理を施すことにより、画像情報を生成する。
【0007】
指示装置63-cは、このような画像情報をPPI(Plan Position Indicator)等の指示方式に適合した視覚情報に変換し、表示画面(図示されない。)を介してその視覚情報を出力する。
【0008】
なお、本発明に関連した先行技術としては、以下に列記する特許文献1および特許文献2があった。
(1) 「探知または測位を行うコア部と表示器とをそれぞれ少なくとも一つずつ備えた舶用機器のネットワークシステムであって、前記コア部は、探知領域内への探知信号の送受信により物体の探知を行い、探知データを生成する探知部、または、測位衛星からの信号を受信して、自船の測位を行う測位部を備え、前記表示器は、前記コア部で外部から受信した探知信号または測位信号から生成された探知データまたは測位データを表示する表示部と、前記コア部の動作環境を指定するコマンドデータを生成して送信する指示部とを備え、前記コア部と前記表示器とがネットワークでつながれ、それぞれの装置が互いに前記探知データまたは測位データおよびコマンドデータをネットワークを介して送受信する」ことにより、「ネットワークでつながれた複数の探知装置および測位装置と表示器との間でのデータ送受信を画像を劣化させることなく容易にし、複数の各探知および測位装置のコア部の動作環境および電源を表示器において行う」点に特徴がある舶用機器のネットワークシステム…特許文献1
【0009】
(2) 「レーダ装置の代わりに、小電力無線装置、GPS装置及びマイクロコンピュータの組みあわせにより、無線LANを形成させる。GPSの位置情報とネットワーク情報から衝突の判定を行う」ことにより、「レーダを設置できない小型船舶においても衝突を予防する」点に特徴がある航行援助装置…特許文献2
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2002−328159号公報
【特許文献2】特開平10−267686号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
ところで、上述した従来例では、船舶50-1の位置が半島40に近いほど、レーダ装置60-1(送信部61-1)によって送信された送信波の電力の大半がその半島40で反射し、あるいは減衰し得る。
【0012】
したがって、このような状態では、船舶50-1の位置に対して半島40の反対側にあり、その半島40に近い海域は、図6に「●」印で示すように、その海域に位置する目標(以下、「不感目標」という。)が指示装置63-1の表示画面上に表示され難くなり、レーダ装置60-1にとって実質的な「死角」となる場合が多かった。
【0013】
しかし、このような「死角」では、例えば、図6に一点鎖線の矢印で示すように、不感目標と船舶50-1とが共に半島40の突端部にほぼ同時に移動する場合には、その船舶50-1を操船する者は、衝突の危険性が刻々と高まっているにもかかわらず、このような不感目標を識別できない可能性があった。
【0014】
本発明は、構成が大幅に変更されることなく、至近点に位置する目標の裏に生じる死角を緩和または回避できる航法補完装置およびレーダ装置を提供することを目的とする。
【課題を解決するための手段】
【0015】
請求項1に記載の発明では、連係手段は、異なる位置で距離または位置の測定を個別に行う第一のレーダ装置と第二のレーダ装置との間における連係を通信路を介して行う。補完手段は、前記第一のレーダ装置および前記第二のレーダ装置の内、一方によって行われた測定の結果を他方によって行われた測定の結果で補完する。
【0016】
すなわち、第一(第二)のレーダ装置によって行われた距離または位置の測定の結果に含まれる死角の領域は、その第一(第二)のレーダ装置と異なる位置から行われ、かつ通信路を介して引き渡された距離または位置の測定の結果で補完される。
【0017】
請求項2に記載の発明では、距離または位置の測定を行うレーダ装置において、識別手段は、前記測定の結果の補完が行われるべききっかけ、または前記補完の対象を識別する。通知手段は、前記きっかけまたは前記補完の対象を前記レーダ装置と異なるレーダ装置に無線伝送する。
【0018】
すなわち、本発明に係るレーダ装置は、そのレーダ装置と異なる他のレーダ装置に対して、死角の補完に供され得る距離または位置の測定の結果の無線伝送による通知を要求することができる。
【0019】
請求項3に記載の発明では、距離または位置の測定を行うレーダ装置において、補完情報生成手段は、前記レーダ装置と異なる他のレーダ装置から無線伝送路された要求に応じて、前記測定の結果の補完に供される補完情報を生成する。伝送手段は、前記補完情報を前記他のレーダ装置に無線伝送する。
【0020】
すなわち、本発明に係るレーダ装置は、無線伝送路を介して連係する他のレーダ装置の死角の補完に供される。
【発明の効果】
【0021】
本発明が適用されたレーダ装置では、他のレーダが異なる位置で行う測距または測位との連係の下で、死角に位置する目標の識別が確度高く実現される。
【0022】
また、本発明に係るレーダと異なる他のレーダ装置は、測距や測位の結果を既述の死角の補完に供するレーダ装置が存在する場合に限って無線伝送路を介して通知することができる。
【0023】
さらに、本発明に係るレーダ装置は、他のレーダ装置によって行われる測距や測位置の精度の向上に活用される。
【0024】
したがって、本発明が適用されたレーダ装置が備えられたサイトや移動体では、大幅なコスト高や構成の複雑化を伴うことなく、測距や測位の精度が安定に高く確保され、このような測距や測位に基づく航行の安全性が高められる。
【図面の簡単な説明】
【0025】
【図1】本発明の一実施形態を示す図である。
【図2】本実施形態の動作フローチャート(1) である。
【図3】本実施形態の動作フローチャート(2) である。
【図4】本実施形態の動作を説明する図である。
【図5】従来のレーダ装置の構成例を示す図である。
【図6】従来例の課題を説明する図である。
【発明を実施するための形態】
【0026】
以下、図面に基づいて本発明の実施形態について詳細に説明する。
図1は、本発明の一実施形態を示す図である。
図において、図5に示すものと機能および構成が同じ構成要素については、同じ符号を付与して示し、ここでは、その説明を省略する。
【0027】
本実施形態と図5に示す従来例との構成の相違点は、レーダ装置10-1、10-2が、レーダ装置60-1、60-2に代えてそれぞれ搭載され、かつ以下の通りに構成された点にある。
【0028】
レーダ装置10-1の構成は、以下の点で、図5に示すレーダ装置60-1の構成と異なる。
(1) 信号処理部62-1に代えて信号処理部11-1が備えられる。
(2) 制御部64-1に代えて制御部12-1が備えられる。
(3) 制御部12-1の特定の入出力ポートに無線部13-1が接続され、その無線部13-1のアンテナ端子にアンテナ14-1の給電点が接続される。
(4) 制御部12-1の入出力ポートに、図示されないGPS受信機の制御端子が接続される。
【0029】
なお、レーダ装置10-2の構成については、レーダ装置10-1の構成と同じであるので、以下では、機能および構成が同じ構成要素に添え番号「1」に代わる添え番号「2」が付加された同じ符号を付与して示し、ここでは、その説明を省略する。
【0030】
また、以下では、レーダ10-1、10-2の双方に共通の事項については、上記笛番号「1」、「2」の何れにも該当し得ることを意味する添え文字「c」を該当する構成要素の符号に付加して記述する。
【0031】
図2は、本実施形態の動作フローチャート(1) である。
図3は、本実施形態の動作フローチャート(2) である。
図4は、本実施形態の動作を説明する図である。
以下、図1〜図4を参照して本実施形態の動作を説明する。
【0032】
レーダ装置10-cでは、船舶50-cの回りに位置する目標の測位は、信号処理部11-cおよび制御部12-cが図5に示す信号処理部62-cおよび制御部64-cとしてそれぞれ機能することにより、後述する点を除いて、従来例と同様にして行われる。
【0033】
本発明の特徴は、本実施形態では、レーダ装置10-cにおいて制御部12-cの配下で信号処理部11-cおよび無線部13-cが以下の通りに行う連係と、その連係の過程で制御部12-cが行う処理の手順とにある。
【0034】
レーダ装置10-1では、信号処理部11-1は、上記連係の下で従来例における信号処理部62-1と同様にして既述の画像情報を生成し、このような画像情報の列を時系列の順に所定の期間に亘ってファーストイン・ファーストアウト方式の記憶領域に蓄積する。なお、このような画像情報には、その画像情報で示される領域の全域および所望の部位や箇所を緯度および経度に基づいて特定可能な「座標情報」が含まれる。
【0035】
指示装置63-1の表示画面上には、上記連係の下で既述の画像情報が変換されることによって生成された視覚情報がPPIとして出力される。
このようなPPI上では、指示装置63-1の操作者は、船舶50-1の至近距離に位置する半島40の裏側の海域の内、例えば、図1にハンチングを付して示すように、既述の死角となる可能性がある領域を目視により識別可能である。
【0036】
操作者は、上記領域を識別すると、表示画面上における位置の特定に供されるポインティングデバイス(タッチパネルであってもよい。)を介して、該当する領域の外枠を3つ以上の点として指定する。
【0037】
制御部12-1は、以下の処理を行う。
(1) 指示装置63-1を介してこのような3つ以上の点を示す座標C1〜Cn(n≧3)を取り込む(図2ステップS1)。
(2) この時点でGPS受信機から与えられる船舶50-1の最新の緯度Lat1および経度Lon1を取得する(図2ステップS2)。
【0038】
(3) 指示装置63-1によってPPIの表示が行われているレンジR-1と、上記緯度Lat-1および経度Lon-1とに基づいて、既述の座標C1〜Cnをそれぞれ緯度・経度の対(Lat1,Lon1)〜(Latn,Lonn)に変換する(図2ステップS3)。
(4) 無線部13-1およびアンテナ14-1を介して、船舶50-1以外の船舶に搭載されたレーダ装置宛に、上記緯度Lat-1、経度Lon-1および緯度・経度の対(Lat1,Lon1)〜(Latn,Lonn)を無線伝送する(図2ステップS4、図4(1))。
【0039】
一方、レーダ装置10-2では、制御部12-2は、以下の処理を行う。
(1) アンテナ14-2および無線部13-2を介して上記緯度Lat-1、経度Lon-1および緯度・経度の対(Lat1,Lon1)〜(Latn,Lonn)を取得する(図3ステップS1、図4(2))。
(2) 信号処理部11-2に蓄積されている最新の画像情報を取得する(図3ステップS2)。
【0040】
(3) その画像情報に含まれる座標情報で示される領域(以下、「指示領域」という。)に、上記緯度・経度の対(Lat1,Lon1)〜(Latn,Lonn)で示される領域(以下、「被補完領域」という。)が含まれるか否かを判別する(図3ステップS3)。
(4) 指示領域に被補完領域が含まれる場合には、指示装置63-2によってPPIの表示が行われているレンジR-2と、その時点においてGPS受信機から得られ、かつ船舶50-2の位置を示す緯度Lat-2、経度Lon-2とを取得する(図3ステップS4)。
【0041】
(5) これらのレンジR-2、緯度Lat-2および経度Lon-2に基づいて、上記被補完領域が船舶50-2でも死角に該当するか否かを判定する(図3ステップS5)。
(6) 被補完領域がこのような死角に該当しない場合には、上記最新の画像情報で示される被補完領域に何らかの目標(移動している目標のみに限定されてもよい。)が位置するか否かを判別する(図3ステップS6)。
【0042】
(7) 被補完領域に上記目標が位置するか否かを示す2値情報を生成し(図3ステップS7)、無線部13-2およびアンテナ14-2を介してレーダ装置10-1宛に、その2値情報を無線伝送する(図3ステップS8、図4(3))。
【0043】
レーダ装置10-1では、制御部12-1は、以下の処理を行う。
(1) アンテナ14-1および無線部13-1を介して上記無線伝送された2値情報を取り込み(図4(4))、その2値情報の論理値に基づいて被補完領域に何らかの目標が位置するか否かを判別し(図2ステップS5)、被補完領域にこのような目標が位置しない場合には、以下の処理を省略する。
【0044】
(2) 反対に、2値情報の論理値が「被補完領域に何らかの目標が位置する」ことを意味する場合には、信号処理部11-1と連係し、あるいは指示装置63-1と直接連係することにより、その指示装置63-1の表示画面上に、その旨を表示する(図2ステップS6、図4(5))。
【0045】
なお、このような表示の内容は、以下の形態のどのような組み合わせであってもよい。
(1) 表示画面上に追加される文字、図形、記号等の視覚情報
(2) 所定の表示属性(色、背景、キャプション等)に基づく被補完領域またはこれに対応する特定の領域の表示
【0046】
すなわち、本実施形態によれば、レーダ装置の基本的な構成が大幅に変更されないにもかかわらず、無線伝送路を介して連係する他のレーダ装置によって行われた測位の結果が「死角」の緩和や補完に供される。
【0047】
また、このような緩和や補完に供される測位の結果は、「被補完領域に上記目標が位置するか否かを示す2値情報」であるため情報量が極めて少なく、かつレーダ装置10-1(制御部12-1)とレーダ装置10-2との間に無線部13-1、アンテナ14-1、14-2および無線部13-2を介して形成される無線伝送路を介して引き渡される。
したがって、本実施形態に係るレーダ装置によれば、至近点に位置する物標等の裏に位置する目標を安価に確度高く識別できる。
【0048】
なお、本実施形態では、「被補完領域に何らかの目標が位置する」ことが指示装置63-1の表示画面上に即座に表示されているが、このような表示が行われるきっかけは、該当する目標の識別が遅れることに起因して航行の安全性が低下し、あるいは損なわれることが許容可能な限度においてどのように設定されてもよい。
【0049】
また、本実施形態では、「被補完領域に何らかの目標が位置するか否かを示す2値情報」は、既述の無線伝送路を介して連係するレーダ装置10-2(制御部12-2)のみから伝送されている。
【0050】
しかし、このように連係するレーダ装置(以下、「連係レーダ装置」という。)の数は複数であってもよく、これらの連係レーダ装置との連係は、例えば、以下の何れかの構成により実現されてもよい。
【0051】
(1) 無線伝送路が全ての連係レーダ装置に共通のチャネルとして構成され、このチャネルを介してレーダ装置10-1(制御部12-1)が主導的に行うポーリングの下で、個々の連係レーダ装置との連係が行われる。
【0052】
(2) 無線伝送路が全ての連係レーダ装置に共通のチャネルとして構成され、何れの連係レーダ装置との連係も、このチャネル上におけるコンテンション方式(例えば、「CSMA−CA方式」)により行われる。
【0053】
(3) 船舶50-1の周辺に位置し、かつ連係レーダ装置となり得るレーダ装置が搭載された個々の船舶(以下、「連係船舶」という。)と、これらの連係船舶との連係に用いることができるチャネル(以下、「連係用チャネル」という。)とが所定のデータベースから取得され、このようにして取得された個々の連係用チャネルを介して該当する連係レーダ装置との連係が行われる。
【0054】
さらに、本実施形態では、上記2値情報が複数の連係レーダ装置から与えられる場合には、「被補完領域に何らかの目標が位置する」ことを示す表示の要否は、以下の何れの形態で行われてもよい。
(1) 複数の連係レーダ装置から与えられた2値情報の論理積、または論理和の論理値に基づいて決定される。
【0055】
(2) 複数の連係レーダ装置から与えられた2値情報が所定の重み(例えば、送信元の連係レーダ毎の「アンテナ高の昇順」、「レンジの降順」等の値として付与される。)との積和と、所定の閾値との大小関係に基づいて決定される。
(3) 複数の連係レーダ装置から与えられた2値情報の多数決に基づいて決定される。
【0056】
なお、上記重みが「アンテナ高の昇順」に付与された場合には、海面反射等のクラッタ内に埋もれた物標の識別の確度が高められる。
【0057】
また、本実施形態では、2値情報は、警報音その他の音響信号として出力されてもよい。
さらに、並行して連係する連係レーダの数が複数である場合には、レーダ装置10-1と連係レーダ装置との間で相互に引き渡される情報に、送信元や宛先のレーダ装置の識別子が含まれることにより、連係の効率や確実性の確保が図られてもよい。
【0058】
また、無線部13-cと連係レーダ装置との間には、以下の項目に適した如何なる変復調方式、多元接続方式、ゾーン構成およびチャネル配置に基づいて無線伝送路が形成されてもよい。
(1) この無線伝送路を介する連係の形態
(2) その連係の過程で引き渡されるべき情報の内容、形式および情報量
(3) 連係レーダ装置の(最大の)台数
【0059】
さらに、このような無線伝送路を介する2値情報等の伝送情報の伝送は、例えば、漁場監視等の特定の業務に供される船舶に搭載されたレーダ装置のみが連係レーダ装置として機能するべき場合には、暗号化技術等が適用されることによって秘匿性が確保されてもよい。
【0060】
また、上記無線伝送路の伝送速度および変復調方式は、連係レーダ装置との間に確保され得る伝送速度が広範にあるいは多様に異なる可能性がある場合には、例えば、個々の連係レーダ装置との間に形成される無線伝送路のチャネル推定の過程で段階的に変更されてもよい。
【0061】
さらに、本実施形態では、レーダ装置10-2は、通常の測位に供される信号処理部11-2が併用されることによって、連係レーダ装置として機能している。
【0062】
しかし、連係レーダ装置(レーダ装置10-2を含む。)の全てまたは一部は、通常の測位に供される信号処理と並行して実行される別の信号処理として既述の処理が行われることによって、レンジの設定に制約を伴わないレーダ装置として構成されてもよい。なお、このような別の信号処理は、信号処理部11-2の余剰の処理量を活用して行われ、あるいはこの信号処理部11-2の他に増設された異なる信号処理部によって行われてもよい。
【0063】
また、本実施形態では、連係レーダ装置(レーダ装置10-2を含む。)からレーダ装置10-1宛に無線伝送され、かつ指示装置63-1の表示画面上に表示される情報は、既述の「2値情報」に限定されず、連係レーダ装置によって識別される以下の情報の如何なる組み合わせであってもよい。
【0064】
(1) 被補完領域にある目標毎の位置(または地理的な分布)の列
(2) 被補完領域にある目標の内、移動している目標毎の速度(および移動方向)の列
(3) 被補完領域の外側に位置し、かつ被補完領域内に位置する可能性が高い目標毎の位置(または地理的な分布)の列
(4) 被補完領域の外側に位置し、かつ被補完領域内に位置する可能性が高い目標毎の速度(および移動方向)の列
【0065】
なお、上記(1)〜(4)項は、制御部12-1の配下で(信号処理部11-1が連係して)指示装置63-1の指示画面上に以下の何れの形態で表示されてもよい。
【0066】
(1) 指示画面上に文字、図形、記号等として重畳される表示
(2) 指示画面上に文字、図形、記号等として重畳される概要表示
(3) 指示画面上に地理的に重畳される表示
(4) 指示画面上に地理的に重畳される概要表示
【0067】
上記概要表示については、ポインティングデバイス等で指定されている期間に、もしくは指定されたときに、対応する詳細な表示で代替され、または対応する詳細な表示が付加されて表示される。ただし、詳細な表示は、地理的に重畳された表示でなくてもよく、文字情報等として別途付加されてもよい。
【0068】
さらに、本実施形態では、連係レーダ装置(レーダ装置10-2を含む。)からレーダ装置10-1宛に無線伝送され、かつ指示装置63-1の表示画面上に表示される情報については、上述したように指示画面上に地理的に重畳される場合には、レーダ装置10-1と連係レーダ装置(レーダ装置10-2を含む。)と何れか一方によって行われる処理、あるいは双方の連係による分散処理として、これらのレーダ装置の間における位置やレンジの相違を吸収するマッピングが施されてもよい。
【0069】
また、本実施例では、レーダ装置10-1と連係レーダ装置(レーダ装置10-2を含む。)との間における無線伝送路の伝搬所要時間と、この無線伝送路を介して連係レーダ装置との連係のために制御部12-1と、連係レーダ装置に備えられた制御部(制御部12-2を含む。)とによって行われる処理の演算所要時間が無視できない程度に長い場合には、例えば、以下に列記する通りにレーダ装置10-1と連係レーダ装置とが連係することにより、両者の間における同期が図られてもよい。
【0070】
(1) 制御部12-1は、船舶50-1以外の船舶に搭載されたレーダ装置宛に無線伝送される緯度Lat-1、経度Lon-1および緯度・経度の対(Lat1,Lon1)〜(Latn,Lonn)に、絶対時刻(または、これに代わる計数値等であってもよい。)を付加する。
【0071】
(2) 連係レーダ装置に備えられた制御部(制御部12-2を含む。)は、レーダ装置10-1宛に無線伝送する2値情報に、上記絶対時刻を付加する。
【0072】
(3) 制御部12-1は、信号処理部11-1と連係し、あるいは指示装置63-1と直接連係することにより、その指示装置63-1の表示画面上に上記2値情報を反映させる際には、上記絶対時刻の偏差が所定の閾値未満であることを確認してその反映の可否を判定する。
【0073】
さらに、本実施形態では、レーダ装置10-1、10-2は、それぞれ船舶50-1、50-2に備えられ、これらの船舶50-1、50-2と共に移動し得る。
しかし、このようなレーダ装置10-1、10-2は、船舶に限定されず、車両、航空機その他の多様な移動体に搭載されてもよく、あるいは一定の地点に設置されてもよい。
【0074】
また、本実施形態では、無線部13-1、13-2およびアンテナ14-1、14-2を介して形成される無線伝送路の伝送容量が十分に高い場合には、連係レーダ装置(レーダ装置10-2を含む。)からレーダ装置10-1に引き渡される情報は、既述の2値情報に限定されず、例えば、その2値情報を生成するために連係レーダにおいて参照されたレーダ信号や画像情報、またはこれらのレーダ信号や画像情報に所定の処理が施されることによって得られた情報がレーダ装置10-1宛に直接無線伝送され、このような画像情報に基づいて2値情報を生成する処理が制御部12-1によって行われてもよい。
【0075】
さらに、本発明は、死角に位置する目標の有無だけではなく、例えば、以下に列記するように、自動衝突予防援助装置(ARPA:Automatic Radar Plotting Aids)による運動の解析と避航操船に必要な情報の提供との対象となる物標を安定に捕捉するためにも、適用可能である。
【0076】
(1) 船舶50-1(制御部12-1)は、上記捕捉の対象となる物標の位置を識別し、無線伝送路を介して周辺に位置する連係船舶(連係レーダ装置)にその位置を通知する。
【0077】
(2) 連係船舶(連係レーダ装置)は、このようにして通知された位置にある物標を識別し、その物標の捕捉に必要な所定の情報を収集し、上記無線伝送路を介して船舶50-1(制御部12-1)に引き渡す。
【0078】
(3) 船舶50-1(制御部12-1)は、レーダ装置10-1で上記物標を識別できないとき、あるいはできない状況(操作者によって判断されてもよい。)には、このようにして引き渡された情報に基づいてその物標を識別し、運動の解析や避航操船に必要な情報を生成する。
【0079】
また、本発明では、「何らかの目標が位置するか否か」の判断の対象は被補完領域の全体でなくてもよく、例えば、被補完領域が区分されてなるセル毎に同様の判断が行われるべき場合にも、以下のように適用可能である。
【0080】
(1) 船舶50-1(制御部12-1)は、(必要であれば、)無線伝送路を介して連係船舶(連係レーダ装置)に上記セルのサイズを通知する。
【0081】
(2) 連係船舶(連係レーダ装置)は、このようにして通知されたサイズで被補完領域が区分されてなるセル毎に、既述の判定を行い、該当するセルの識別子(座標等であってもよい。)と共にその判定の結果を示す2値情報を生成し、何れも、上記無線伝送路を介して船舶50-1(制御部12-1)に引き渡す。
【0082】
(3) 船舶50-1(制御部12-1)は、このようにして引き渡された2値情報および識別子の対毎に、既述の処理を行う。
【0083】
さらに、本実施形態では、船舶50-1(レーダ装置10-1)は、死角の緩和や補完のために連係すべき連係船舶(連係レーダ装置)に対して、緯度Lat-1、経度Lon-1および緯度・経度の対(Lat1,Lon1)〜(Latn,Lonn)を無線伝送している。
【0084】
しかし、このような連係船舶(連係レーダ装置)との連係のきっかけは、以下に列記する項目、もしくはこれらの項目の如何なる組み合わせであってもよく、またはこのような連係が個々の連係船舶(連係レーダ装置)によって自発的に行われる場合には無くてもよい。
【0085】
(1) 予め決められた周期または頻度で与えられる時刻
(2) 操作者によって行われた所定の操作
(3) レーダ装置10-1によって識別された所定の事象(死角の発生(可能性)を直接または間欠的に示す。)
【0086】
また、船舶50-1(レーダ装置10-1)から船舶50-2(レーダ装置10-2)に無線伝送される情報は、上記緯度Lat-1、経度Lon-1および緯度・経度の対(Lat1,Lon1)〜(Latn,Lonn)に限定されず、例えば、以下に列記する項目、またはこれらの項目の如何なる組み合わせであってもよい。
【0087】
(1) 船舶50-1の存在(緯度・経度等の位置を含まない。)
(2) 指示装置63-1による指示が行われているレンジ
(3) 補完対象領域に該当する地域の識別子
【0088】
(4) レーダ装置10-1によって測位が行われるべき地域(指示方式に適した座標等として与えられる。)
(5) STC(Sensitivity-Time Control)、FTC(Fast Time Constant)、CFAR(Constant False Alarm Rate)、MTI(Moving Target Induction)等のように信号処理部11-1によって行われている(行われるべき)信号処理の形態
【0089】
さらに、本実施形態では、レーダ装置10-2(連係レーダ装置)は、無線伝送路を介してレーダ装置10-1から緯度Lat-1、経度Lon-1および緯度・経度の対(Lat1,Lon1)〜(Latn,Lonn)が引き渡されると、速やかに既述の2値情報をレーダ装置10-1宛に無線伝送している。
【0090】
しかし、このような無線伝送が行われるきっかけは、以下に列記する項目、またはこれらの項目の如何なる組み合わせであってもよい。
(1) 先行して与えられ、あるいは識別され、かつレーダ装置10-1との連係が開始されるべき時点を基準として予め決められた周期(頻度)で与えられる時刻
(2) 操作者によって行われる所定の操作
(3) レーダ装置10-2によって識別された所定の事象
【0091】
また、船舶50-2(レーダ装置10-2)から船舶50-1(レーダ装置10-1)に無線伝送される情報は、既述の2値情報に限定されず、例えば、以下に列記する項目、またはこれらの項目の如何なる組み合わせであってもよい。
【0092】
(1) 被補完領域に位置する目標の位置
(2) 被補完領域において上記目標が位置する地域の識別子
(3) 被補完領域に位置する目標の速度および移動方向
【0093】
(4) 被補完領域に位置する可能性がある目標に関する所望の情報
(5) 被補完領域(または既述のセル)に関して信号処理部11-1によって所定の信号処理が施されるべきレーダ信号
(6) 船舶50-2(レーダ装置10-2)との位置やレンジの相違を吸収するマッピングが施され、かつ被補完領域(または既述のセル)に関して信号処理部11-1によって所定の信号処理が施されるべきレーダ信号
【0094】
さらに、レーダ装置10-1、10-2の連係の過程で行われる処理は、如何なる形態による機能分散や負荷分散の下で実現されてもよい。
【0095】
また、本発明の特徴的な処理を行うために連係する信号処理部11-1、制御部12-1、無線部13-1、13-2、制御部12-2および信号処理部11-2は、既述の通りにレーダ装置10-1、10-2に組み込まれなくてもよく、例えば、これらのレーダ装置10-1、10-2に該当する既存のレーダ装置に付加されることによって、同様の機能を実現する付加装置として構成されてもよい。
【0096】
さらに、本発明が適用されるレーダ装置10-1、10-2のレーダ方式は、必ずしも同じでなくてもよく、かつ如何なるものであってもよい。
【0097】
また、本発明が適用されるレーダ装置10-1、10-2の指示方式は、必ずしも同じでなくてもよく、かつ如何なるものであってもよい。
【0098】
さらに、本発明は、レーダ装置10-1、10-2は、スキャン方向やスイープ方向における目標の分布や位置の計測に供されるレーダ装置に限定されず、例えば、接岸距離系や電波高度計のように、距離のみの計測に供されるレーダ装置にも同様に適用可能である。
【0099】
また、本発明は、上述した実施形態に限定されず、本発明の範囲において多様な実施形態の構成が可能であり、構成要素の全てまたは一部に如何なる改良が施されてもよい。
【0100】
以下、本願に開示された発明の内、特許請求の範囲に記載しなかった発明を整理し、「特許請求の範囲」および「課題を解決するための手段」の欄の記載に準じた様式により列記する。
【0101】
[請求項4] 請求項1に記載の航法補完装置において、
前記連係手段は、
前記第一のレーダ装置と前記第二のレーダ装置との双方または何れか一方に同期して前記連係を行う
ことを特徴とする航法補完装置。
【0102】
このような構成の航法補完装置では、請求項1に記載の航法補完装置において、前記連係手段は、前記第一のレーダ装置と前記第二のレーダ装置との双方または何れか一方に同期して前記連係を行う。
【0103】
すなわち、第一のレーダ装置と第二のレーダ装置とは、何れも、一方の内部で発生した所定の事象、あるいは他方の状態や振る舞いに応じて定まるきっかけで、上記連係を実現する。
【0104】
したがって、これらのレーダ装置の間における連係は、密接に、あるいは精度よく実現される。
【0105】
[請求項5] 請求項1または請求項4に記載の航法補完装置において、
前記第一のレーダ装置と前記第二のレーダ装置との双方に分散されて付加され、または組み込まれた
ことを特徴とする航法補完装置。
【0106】
このような構成の航法補完装置では、請求項1または請求項4に記載の航法補完装置は、前記第一のレーダ装置と前記第二のレーダ装置との双方に分散されて付加され、または組み込まれる。
【0107】
すなわち、本発明に係る航法補完装置は、第一のレーダ装置と第二のレーダ装置との間における機能分散や負荷分散の形態に適した構成のユニットやパッケージとして、これらのレーダ装置に付加され、あるいは備えられる。
【0108】
したがって、本発明は、レーダ装置の基本的な構成が大幅に変更されることなく、多様な態様による実現が可能となる。
【0109】
[請求項6] 請求項1、4、5の何れか1項に記載の航法補完装置において、
前記通信路は、
無線通信路である
ことを特徴とする航法補完装置。
【0110】
このような構成の航法補完装置では、請求項1、4、5の何れか1項に記載の航法補完装置において、前記通信路は、無線通信路である。
【0111】
すなわち、第一のレーダ装置と第二のレーダ装置との連係は、これらのレーダ装置の位置が地理的に大きく隔たり、あるいは両者の間における通信路が有線伝送路として敷設できない場合であっても、実現される。
【0112】
したがって、多様な位置にある複数のレーダ装置との連係の下で、既述の死角にかかわる測距や測位の補完が実現可能となる。
【0113】
[請求項7] 請求項2に記載のレーダ装置において、
前記きっかけには、
前記レーダの存在が含まれる
ことを特徴とするレーダ装置。
【0114】
このような構成のレーダ装置では、請求項2に記載のレーダ装置において、前記きっかけには、前記レーダの存在が含まれる。
【0115】
すなわち、本発明に係るレーダ装置と連係することにより死角にかかわる測距や測位の結果の補完を可能とする他のレーダ装置は、その連係の相手が少なくとも1つ存在することを確認することなく無用な連係を試行する必要がなくなる。
【0116】
したがって、本発明に係るレーダ装置と連係する他のレーダ装置は、既述の相手がいないにもかかわらず上記連係を試行することに起因する資源の無駄な消費を回避することができる。
【0117】
[請求項8] 請求項2に記載のレーダ装置において、
前記きっかけには、
前記レーダの位置が含まれる
ことを特徴とするレーダ装置。
【0118】
このような構成のレーダ装置では、請求項2に記載のレーダ装置において、前記きっかけには、前記レーダの位置が含まれる。
【0119】
すなわち、本発明に係るレーダ装置の死角は、そのレーダ装置の位置を前提として他のレーダ装置によって行われた測距や測位の結果で補完される。
【0120】
したがって、このような死角の補完は、上記他のレーダ装置が本発明に係るレーダ装置の位置を把握することなく行われる場合に比べて、効率的に、精度よく実現される。
【0121】
[請求項9] 請求項2に記載のレーダ装置において、
前記補完の対象は、
前記補完が行われるべき地理的な位置である
ことを特徴とするレーダ装置。
【0122】
このような構成のレーダ装置では、請求項2に記載のレーダ装置において、前記補完の対象は、前記補完が行われるべき地理的な位置である。
【0123】
すなわち、本発明に係るレーダ装置の死角は、その死角の補完が行われるべき地理的な位置を前提として他のレーダ装置によって行われた測距や測位の結果で補完される。
【0124】
したがって、このような死角の補完は、上記他のレーダ装置が既述の地理的な領域を把握することなく行われる場合に比べて、効率的に、精度よく実現される。
【0125】
[請求項10] 請求項2に記載のレーダ装置において、
前記補完の対象は、
前記補完が行われるべき地域である
ことを特徴とするレーダ装置。
【0126】
このような構成のレーダ装置では、請求項2に記載のレーダ装置において、前記補完の対象は、前記補完が行われるべき地域である。
【0127】
すなわち、本発明に係るレーダ装置の死角は、その死角の補完が行われるべき地域を前提として他のレーダ装置によって行われた測距や測位の結果で補完される。
【0128】
したがって、このような死角の補完は、上記他のレーダ装置が既述の地域を把握することなく行われる場合に比べて、効率的に、精度よく実現される。
【0129】
[請求項11] 請求項2に記載のレーダ装置において、
前記きっかけまたは前記補完の対象に、
前記レーダによって前記測定が行われるレンジが含まれる
ことを特徴とするレーダ装置。
【0130】
このような構成のレーダ装置では、請求項2に記載のレーダ装置において、前記きっかけまたは前記補完の対象に、前記レーダによって前記測定が行われるレンジが含まれる。
【0131】
すなわち、本発明に係るレーダ装置の死角は、その死角の補完が行われるべきレンジを前提として他のレーダ装置によって行われた測定の結果で補完される。
【0132】
したがって、このような死角の補完は、上記他のレーダ装置が既述のレンジを把握することなく行われる場合に比べて、効率的に、精度よく実現される。
【0133】
[請求項12] 請求項2に記載のレーダ装置において、
前記きっかけまたは前記補完の対象に、
前記レーダによって前記測定が行われる地域が含まれる
ことを特徴とするレーダ装置。
【0134】
このような構成のレーダ装置では、請求項2に記載のレーダ装置において、前記きっかけまたは前記補完の対象に、前記レーダによって前記測定が行われる地域が含まれる。
【0135】
すなわち、本発明に係るレーダ装置の死角は、そのレーダによって測距または測位が行われる地域(死角が含まれる。)を前提として他のレーダ装置によって行われた測距や測位の結果で補完される。
【0136】
したがって、このような死角の補完は、上記他のレーダ装置が既述の地域を把握することなく行われる場合に比べて、効率的に、精度よく実現される。
【0137】
[請求項13] 請求項2に記載のレーダ装置において、
前記きっかけまたは前記補完の対象に、
前記レーダ装置によって行われ、かつ前記測定に供される信号処理の形態が含まれる
ことを特徴とするレーダ装置。
【0138】
このような構成のレーダ装置では、請求項2に記載のレーダ装置において、前記きっかけまたは前記補完の対象に、前記レーダ装置によって行われ、かつ前記測定に供される信号処理の形態が含まれる。
【0139】
すなわち、本発明に係るレーダ装置の死角は、そのレーダ装置が測距や測位のために行う信号処理の形態を前提として他のレーダ装置によって行われた測距や測位の結果で補完される。
【0140】
したがって、このような死角の補完は、上記他のレーダ装置が既述の信号処理の形態を把握することなく行われる場合に比べて、効率的に、精度よく実現される。
【0141】
[請求項14] 請求項2、7、8、9、10、11、12、13の何れか1項に記載のレーダ装置において、
前記測定の結果に、前記レーダ装置と異なるレーダ装置から通知された特定の目標の存在を付加する補完手段を備えた
ことを特徴とするレーダ装置。
【0142】
このような構成のレーダ装置では、請求項2、7、8、9、10、11、12、13の何れか1項に記載のレーダ装置において、補完手段は、前記測定の結果に、前記レーダ装置と異なるレーダ装置から通知された特定の目標の存在を付加する。
【0143】
すなわち、本発明に係るレーダ装置では、そのレーダによって行われた測距や測位の結果が基本的に変更が加えられることなく、他のレーダ装置との連係の下で、死角における特定の目標の存在の識別が可能となる。
【0144】
したがって、本発明に係るレーダ装置は、死角が簡便に補完される。
【0145】
[請求項15] 請求項2、7、8、9、10、11、12、13の何れか1項に記載のレーダ装置において、
前記測定の結果に、前記レーダ装置と異なるレーダ装置から通知された特定の目標の所在の反映を図る補完手段を備えた
ことを特徴とするレーダ装置。
【0146】
このような構成のレーダ装置では、請求項2、7、8、9、10、11、12、13の何れか1項に記載のレーダ装置において、補完手段は、前記測定の結果に、前記レーダ装置と異なるレーダ装置から通知された特定の目標の所在の反映を図る。
【0147】
すなわち、本発明に係るレーダ装置では、死角における特定の目標の存在が他のレーダ装置との連係の下で識別され、かつ測距や測位の結果に反映される。
【0148】
したがって、本発明に係るレーダ装置は、測距や測位を実現する処理の過程で死角の補完が図られる。
【0149】
[請求項16] 請求項2、7、8、9、10、11、12、13の何れか1項に記載のレーダ装置において、
前記測定の結果に、前記レーダ装置と異なるレーダ装置から通知された特定の目標の所在および速度の反映を図る補完手段を備えた
ことを特徴とするレーダ装置。
【0150】
このような構成のレーダ装置では、請求項2、7、8、9、10、11、12、13の何れか1項に記載のレーダ装置において、補完手段は、前記測定の結果に、前記レーダ装置と異なるレーダ装置から通知された特定の目標の所在および速度の反映を図る。
【0151】
すなわち、本発明に係るレーダ装置では、死角における特定の目標の存在と速度とが他のレーダ装置との連係の下で識別され、かつ測定の結果に反映される。
【0152】
したがって、本発明に係るレーダ装置は、測距や測位を実現する処理の過程で死角の補完が図られる。
【0153】
[請求項17] 請求項2、7、8、9、10、11、12、13の何れか1項に記載のレーダ装置において、
前記測定の結果に、前記レーダ装置と異なるレーダ装置から通知された特定の目標の所在、速度および移動方向の反映を図る補完手段を備えた
ことを特徴とするレーダ装置。
【0154】
このような構成のレーダ装置では、請求項2、7、8、9、10、11、12、13の何れか1項に記載のレーダ装置において、補完手段は、前記測定の結果に、前記レーダ装置と異なるレーダ装置から通知された特定の目標の所在、速度および移動方向の反映を図る。
【0155】
すなわち、本発明に係るレーダ装置では、死角における特定の目標の存在と速度と移動方向が他のレーダ装置との連係の下で識別され、かつ測距や測位の結果に反映される。
【0156】
したがって、本発明に係るレーダ装置は、測距や測位を実現する処理の過程で死角の補完が図られる。
【0157】
[請求項18] 請求項2、7、8、9、10、11、12、13の何れか1項に記載のレーダ装置において、
前記測定の結果に、前記レーダ装置と異なるレーダ装置から通知され、かつ前記結果に対する反映の対象となり得る特定の目標の存在の反映を図る補完手段を備えた
ことを特徴とするレーダ装置。
【0158】
このような構成のレーダ装置では、請求項2、7、8、9、10、11、12、13の何れか1項に記載のレーダ装置において、補完手段は、前記測距または前記測位の結果に、前記レーダ装置と異なるレーダ装置から通知され、かつ前記結果に対する反映の対象となり得る特定の目標の存在の反映を図る。
【0159】
すなわち、本発明に係るレーダ装置では、やがて死角に位置し得る特定の目標の存在が他のレーダ装置との連係の下で識別され、かつ測定の結果に反映される。
【0160】
したがって、本発明に係るレーダ装置は、死角に位置し得る目標を予め把握して運用することが可能となる。
【0161】
[請求項19] 請求項14ないし請求項18の何れか1項に記載のレーダ装置において、
前記補完手段は、
前記測定を実現するレーダ信号処理により前記反映を図る
ことを特徴とするレーダ装置。
このような構成のレーダ装置では、請求項14ないし請求項18の何れか1項に記載のレーダ装置において、前記補完手段は、前記測定を実現するレーダ信号処理により前記反映を図る。
【0162】
すなわち、他のレーダ装置との連係の下で行われる死角の補完は、上記レーダ信号処理の過程で図られる。
【0163】
したがって、上記死角の補完は、指示装置によって出力される画像情報に施される処理の過程で行われるより、所望の指示方式や仕様に柔軟に適応した形態で実現される。
【0164】
[請求項20] 請求項14ないし請求項18の何れか1項に記載のレーダ装置において、
前記補完手段は、
前記測定の結果を指示する画像処理により前記反映を図る
ことを特徴とするレーダ装置。
【0165】
このような構成のレーダ装置では、請求項14ないし請求項18の何れか1項に記載のレーダ装置において、前記補完手段は、前記測定の結果を指示する画像処理により前記反映を図る。
【0166】
すなわち、他のレーダ装置との連係の下で行われる死角の補完は、レーダ信号処理の過程で行われる処理に比べて、一般に、処理量および演算対象の情報量が少ない画像処理の過程で図られる。
【0167】
したがって、上記死角の補完は、所望の指示方式や仕様に適する範囲において効率的に、かつ安価に実現される。
【0168】
[請求項21] 請求項3に記載のレーダ装置において、
前記補完情報は、
前記測定によって識別された特定の目標の存在である
ことを特徴とするレーダ装置。
このような構成のレーダ装置では、請求項3に記載のレーダ装置において、前記補完情報は、前記測定によって識別された特定の目標の存在である。
【0169】
すなわち、他のレーダ装置によれば、本発明に係るレーダ装置と無線伝送路を介して連係することにより、死角に上記特定の目標が存在することを識別可能となる。
【0170】
したがって、死角に関する測距または測位の補完が図られる。
【0171】
[請求項22] 請求項3に記載のレーダ装置において、
前記補完情報は、
前記測定によって識別された特定の目標の位置である
ことを特徴とするレーダ装置。
【0172】
このような構成のレーダ装置では、請求項3に記載のレーダ装置において、前記補完情報は、前記測定によって識別された特定の目標の位置である。
【0173】
すなわち、他のレーダ装置では、本発明に係るレーダ装置と無線伝送路を介して連係することにより、死角における上記特定の目標の位置を識別可能となる。
【0174】
したがって、死角に関する測距または測位の補完が図られる。
【0175】
[請求項23] 請求項3に記載のレーダ装置において、
前記補完情報は、
前記測定によって識別された特定の目標が位置する地域である
ことを特徴とするレーダ装置。
【0176】
このような構成のレーダ装置では、請求項3に記載のレーダ装置において、前記補完情報は、前記測定によって識別された特定の目標が位置する地域である。
【0177】
すなわち、他のレーダ装置では、本発明に係るレーダ装置と無線伝送路を介して連係することにより、上記特定の目標が位置する地域に死角が該当するか否かを識別可能となる。
【0178】
したがって、死角に関する測距または測位の補完が図られる。
【0179】
[請求項24] 請求項3に記載のレーダ装置において、
前記補完情報は、
前記測定によって識別された特定の目標の速度または速度ベクトルである
ことを特徴とするレーダ装置。
【0180】
このような構成のレーダ装置では、請求項3に記載のレーダ装置において、前記補完情報は、前記測定によって識別された特定の目標の速度または速度ベクトルである。
【0181】
すなわち、他のレーダ装置では、本発明に係るレーダ装置と無線伝送路を介して連係することにより、死角に位置する特定の目標の速度または速度ベクトルを識別可能となる。
【0182】
したがって、死角に関する測距または測位の補完が図られる。
【0183】
[請求項25] 請求項3に記載のレーダ装置において、
前記補完情報は、
前記測定によって識別され、かつ前記他のレーダ装置によって行われた測距または測位の結果の補完に供され得る目標の候補である
ことを特徴とするレーダ装置。
【0184】
このような構成のレーダ装置では、請求項3に記載のレーダ装置において、前記補完情報は、前記測定によって識別され、かつ前記他のレーダ装置によって行われた測距または測位の結果の補完に供され得る目標の候補である。
【0185】
すなわち、他のレーダ装置では、本発明に係るレーダ装置と無線伝送路を介して連係することにより、死角に位置する可能性がある目標を識別できる。
【0186】
したがって、死角に関する測距または測位の円滑な補完が可能となる。
【0187】
[請求項26] 請求項3に記載のレーダ装置において、
前記補完情報は、
前記他のレーダ装置によって行われた測定の結果を補完する信号処理の対象となり得るレーダ信号である
ことを特徴とするレーダ装置。
【0188】
このような構成のレーダ装置では、請求項3に記載のレーダ装置において、前記補完情報は、前記他のレーダ装置によって行われた測定の結果を補完する信号処理の対象となり得るレーダ信号である。
【0189】
すなわち、他のレーダ装置では、本発明に係るレーダ装置から無線伝送路を介して引き渡されたレーダ信号に施される信号処理により、死角の補完を図る。
【0190】
したがって、死角に関する測距または測位の多様な形態による補完を柔軟に図ることが可能となる。
【0191】
[請求項27] 請求項26に記載のレーダ装置において、
前記レーダ信号には、
前記他のレーダ装置によって測定が行われる地域またはレンジとのマッピングが施された
ことを特徴とするレーダ装置。
【0192】
このような構成のレーダ装置では、請求項26に記載のレーダ装置において、前記レーダ信号には、前記他のレーダ装置によって測定が行われる地域またはレンジとのマッピングが施される。
【0193】
すなわち、上記他のレーダ装置が死角の補完のために行う信号処理の対象となるレーダ信号は、測定が行われる地域またはレンジとのマッピングが本発明に係るレーダ装置によって施されて与えられる。
【0194】
したがって、死角の補完のために行われる信号処理の処理量と、演算対象のサイズとの削減が図られる。
【符号の説明】
【0195】
10,60 レーダ装置
11,62 信号処理部
12,64 制御部
13 無線部
14 アンテナ
40 半島
50 船舶
61 送受信部
63 指示装置
【特許請求の範囲】
【請求項1】
異なる位置で距離または位置の測定を個別に行う第一のレーダ装置と第二のレーダ装置との間における連係を通信路を介して行う連係手段と、
前記第一のレーダ装置および前記第二のレーダ装置の内、一方によって行われた測定の結果を他方によって行われた測定の結果で補完する補完手段と
を備えたことを特徴とする航法補完装置。
【請求項2】
距離または位置の測定を行うレーダ装置であって、
前記測定の結果の補完が行われるべききっかけ、または前記補完の対象を識別する識別手段と、
前記きっかけまたは前記補完の対象を前記レーダ装置と異なるレーダ装置に無線伝送する通知手段と
を備えたことを特徴とするレーダ装置。
【請求項3】
距離または位置の測定を行うレーダ装置であって、
前記レーダ装置と異なる他のレーダ装置から無線伝送された要求に応じて、前記測定の結果の補完に供される補完情報を生成する補完情報生成手段と、
前記補完情報を前記他のレーダ装置に無線伝送する伝送手段と
を備えたことを特徴とするレーダ装置。
【請求項1】
異なる位置で距離または位置の測定を個別に行う第一のレーダ装置と第二のレーダ装置との間における連係を通信路を介して行う連係手段と、
前記第一のレーダ装置および前記第二のレーダ装置の内、一方によって行われた測定の結果を他方によって行われた測定の結果で補完する補完手段と
を備えたことを特徴とする航法補完装置。
【請求項2】
距離または位置の測定を行うレーダ装置であって、
前記測定の結果の補完が行われるべききっかけ、または前記補完の対象を識別する識別手段と、
前記きっかけまたは前記補完の対象を前記レーダ装置と異なるレーダ装置に無線伝送する通知手段と
を備えたことを特徴とするレーダ装置。
【請求項3】
距離または位置の測定を行うレーダ装置であって、
前記レーダ装置と異なる他のレーダ装置から無線伝送された要求に応じて、前記測定の結果の補完に供される補完情報を生成する補完情報生成手段と、
前記補完情報を前記他のレーダ装置に無線伝送する伝送手段と
を備えたことを特徴とするレーダ装置。
【図1】



【図2】
【図3】
【図4】

【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−42427(P2012−42427A)
【公開日】平成24年3月1日(2012.3.1)
【国際特許分類】
【出願番号】特願2010−186299(P2010−186299)
【出願日】平成22年8月23日(2010.8.23)
【出願人】(000004330)日本無線株式会社 (1,186)
【Fターム(参考)】
【公開日】平成24年3月1日(2012.3.1)
【国際特許分類】
【出願日】平成22年8月23日(2010.8.23)
【出願人】(000004330)日本無線株式会社 (1,186)
【Fターム(参考)】
[ Back to top ]