
航空機の四次元最適経路誘導システム
【課題】複数機に対してコンフリクトを発生させない条件下で管理空域に進入してから退出するまでの全時間における四次元最適経路を全機体に対して算出することが可能な航空機の四次元最適経路誘導システムを提供する。
【解決手段】航空機の四次元最適経路誘導システム1は、管理空域Areal内に存在する複数の航空機2について、複数の航空機2の各機体情報をそれぞれ入手し、航空機2同士のコンフリクトがない状態で、各航空機2がそれぞれ当該管理空域Arealに進入してから退出するまでの全時間についての各経路コストが最小になるように各航空機2に対する各四次元最適経路を算出する最適経路計算装置31と、複数の航空機2から各機体情報を受信して最適経路計算装置31に送信し、最適経路計算装置31が算出した各四次元最適経路を各航空機2に対してそれぞれ送信する送受信装置34とを備える。
【解決手段】航空機の四次元最適経路誘導システム1は、管理空域Areal内に存在する複数の航空機2について、複数の航空機2の各機体情報をそれぞれ入手し、航空機2同士のコンフリクトがない状態で、各航空機2がそれぞれ当該管理空域Arealに進入してから退出するまでの全時間についての各経路コストが最小になるように各航空機2に対する各四次元最適経路を算出する最適経路計算装置31と、複数の航空機2から各機体情報を受信して最適経路計算装置31に送信し、最適経路計算装置31が算出した各四次元最適経路を各航空機2に対してそれぞれ送信する送受信装置34とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、航空機の四次元最適経路誘導システムに係り、特に、管理空域に存在する航空機に対して四次元最適経路を算出して送信する航空機の四次元最適経路誘導システムに関する。
【背景技術】
【0002】
現行の航空機に対する管制業務は、例えば航空機ターミナル管制業務に携わる航空機交通管制官(以下、管制官という。)が、レーダ情報や各航空機から送信されてくる情報等に基づいて例えば管制卓の表示画面に表示される各航空機の飛行状況等を監視しながら、管制官の思考や判断等に基づいて各航空機に着陸の順序や待機等を指示することにより行われている。しかし、今後、航空機の交通量がさらに増加することが予測されており、現状のままでは管制官の負担が増大して、安全で効率的な誘導業務に支障が生じることが懸念されている。
【0003】
そこで、近年、航空機の四次元的な運動、すなわち三次元空間内を時間に応じて移動する運動をコンピュータ等で管理し、最適な経路等を演算して、管制官の思考や判断を支援すること等を目的とした最適化システムや支援システム等が種々開発されている。例えば、特許文献1に記載の四次元運動経路の最適化システム等の発明では、航空機の四次元初期設定座標と三次元初期設定速度とを変数とする物理的評価関数を逆ダイナミックスに従って導出し、評価関数の最適解を探索して求めることで単一解を得ることが提案されている。
【0004】
また、特許文献2に記載の四次元自動航行体等の発明では、航空機に搭載されたコンピュータで、航空機が現在位置と目標点の間に設定されるウェイポイント(waypoint)に基づいて適正化通過点を自動的に発見しながら航行することが提案されている。さらに、特許文献3に記載の管制官意思決定支援システム等の発明では、飛行場に到着しようとする航空機を検出し、検出されたすべての航空機に関して滑走路までの最短の飛行経路を判定することが提案されている。
【特許文献1】特開2002−308190号公報
【特許文献2】特開2004−326363号公報
【特許文献3】特開2006−53723号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1や特許文献2に記載の発明では、単一機を対象としているため、複数の機体間の異常接近や空中衝突すなわちコンフリクトについて考慮されておらず、航空機同士のコンフリクトの回避を重視する管制官の管制業務を必ずしも的確に支援するものとはならない。
【0006】
また、特許文献1に記載の発明では、同文献の各図に示されるように有効な解を演算し得る時間幅が数分程度であり、特許文献2に記載の発明では、航空機の現在位置とウェイポイントとの間の範囲で演算を行うものであり、例えば航空機が管制空域に進入してから滑走路に着陸するなど当該管理空域から退出するまでの全時間における最適性が保証されているとは言い難い。その点でも、管制官の要求を必ずしも満たすものではない。
【0007】
その点、特許文献3に記載の発明は、複数機の経路設定や合流順序付けを支援するものではあるが、事前に経路が定められていることが前提となっている。そのため、待機や迂回等の要素が考慮されておらず、航空機の経路のフレキシビリティが担保されているとはいえない。
【0008】
さらに、故障やトラブル等のインシデントが発生した機体は最優先で滑走路に着陸させる必要があるが、特許文献1〜3に記載の発明ではいずれもこのようなインシデントへの対応が考慮されていない。また、管制官等のオペレータによる経路変更の要請もあるが、これらの発明ではいずれもそのような要請に必ずしも応えることができないという問題があった。
【0009】
また、複数機の経路設定等においては、複数機に対して最も合理的な経路を算出して指示することが理想的であり考慮される必要があるが、その一方で、現実的な問題として、可能な限り早急に最適な経路を算出して迅速に各航空機に送信して指示することも考慮されなければならないという問題もある。
【0010】
本発明は、前記事情に鑑みてなされたものであり、複数機に対してコンフリクトを発生させない条件下で管理空域に進入してから退出するまでの全時間における四次元最適経路を全機体に対して算出することが可能な航空機の四次元最適経路誘導システムを提供することを目的とする。また、インシデントやオペレータによる経路変更に対応可能な航空機の四次元最適経路誘導システムを提供することをも目的とする。
【課題を解決するための手段】
【0011】
前記の問題を解決するために、第1の発明は、航空機の四次元最適経路誘導システムにおいて、
管理空域内に存在する複数の航空機について、前記複数の航空機の各機体情報をそれぞれ入手し、前記航空機同士のコンフリクトがない状態で、前記各航空機がそれぞれ当該管理空域に進入してから退出するまでの全時間についての各経路コストが最小になるように前記各航空機に対する各四次元最適経路を算出する最適経路計算装置と、
前記複数の航空機から各機体情報を受信して前記最適経路計算装置に送信し、前記最適経路計算装置が算出した前記各四次元最適経路を前記各航空機に対してそれぞれ送信する送受信装置と、
を備えることを特徴とする。
【0012】
第2の発明は、航空機の四次元最適経路誘導システムにおいて、
管理空域内に存在する複数の航空機について、前記複数の航空機の各機体情報をそれぞれ入手し、前記航空機同士のコンフリクトがない状態で、前記各航空機がそれぞれ当該管理空域に進入してから退出するまでの全時間についての各経路コストの合計が最小になるように前記各航空機に対する各四次元最適経路を算出する最適経路計算装置と、
前記複数の航空機から各機体情報を受信して前記最適経路計算装置に送信し、前記最適経路計算装置が算出した前記各四次元最適経路を前記各航空機に対してそれぞれ送信する送受信装置と、
を備えることを特徴とする。
【0013】
第3の発明は、第1または第2の発明の航空機の四次元最適経路誘導システムにおいて、前記航空機が前記管理空域に進入してから退出するまでの全時間についての前記経路コストは、当該航空機が当該管理空域に進入してから退出するまでの全飛行距離であることを特徴とする。
【0014】
第4の発明は、第1または第2の発明の航空機の四次元最適経路誘導システムにおいて、前記航空機が前記管理空域に進入してから退出するまでの全時間についての前記経路コストは、当該航空機が当該管理空域に進入してから退出するまでの全飛行時間であることを特徴とする。
【0015】
第5の発明は、第1または第2の発明の航空機の四次元最適経路誘導システムにおいて、前記航空機が前記管理空域に進入してから退出するまでの全時間についての前記経路コストは、当該航空機が当該管理空域に進入してから退出するまでの全燃料消費量であることを特徴とする。
【0016】
第6の発明は、第1から第5のいずれかの発明の航空機の四次元最適経路誘導システムにおいて、前記最適経路計算装置は、前記管理空域内に存在する複数の航空機にそれぞれ保護閾値を設定し、前記航空機同士の前記各保護閾値が接する場合には前記航空機同士のコンフリクトが生じると判定し、一方の航空機の経路を変更して前記航空機同士のコンフリクトを回避して、前記各航空機がそれぞれ当該管理空域に進入してから退出するまでの全時間についての各経路コストまたは前記各経路コストの合計が最小になるように前記各航空機に対する各四次元最適経路を算出することを特徴とする。
【0017】
第7の発明は、第1から第6のいずれかの発明の航空機の四次元最適経路誘導システムにおいて、前記最適経路計算装置は、前記管理空域に新たに航空機が進入する場合には、前記新たに進入する航空機を含めた前記管理空域内に存在する全ての前記航空機について、再度、前記航空機同士のコンフリクトがない状態で、前記各航空機がそれぞれ当該管理空域に進入してから退出するまでの全時間についての各経路コストまたは前記各経路コストの合計が最小になるように前記各航空機に対する各四次元最適経路を算出することを特徴とする。
【0018】
第8の発明は、第1から第7のいずれかの発明の航空機の四次元最適経路誘導システムにおいて、前記最適経路計算装置は、前記送受信装置を介して前記航空機から緊急報告を受信した場合には、前記緊急報告を発信した当該航空機自体の前記経路コストが最小となるように経路を算出する条件下で、再度、前記航空機同士のコンフリクトがない状態で、前記各航空機がそれぞれ当該管理空域に進入してから退出するまでの全時間についての各経路コストまたは前記各経路コストの合計が最小になるように前記各航空機に対する各四次元最適経路を算出することを特徴とする。
【0019】
第9の発明は、第1から第8のいずれかの発明の航空機の四次元最適経路誘導システムにおいて、前記最適経路計算装置が算出した前記複数の航空機に対する前記各四次元最適経路を画面上に表示する表示手段を有し、前記最適経路計算装置に対して特定の航空機に対する四次元最適経路の変更を指令可能な経路変更指令生成装置を備えることを特徴とする。
【0020】
第10の発明は、第9の発明の航空機の四次元最適経路誘導システムにおいて、前記最適経路計算装置は、前記経路変更指令生成装置から前記四次元最適経路の変更の指令を受けた場合には、変更された経路を変更しない条件下で、再度、前記航空機同士のコンフリクトがない状態で、前記各航空機がそれぞれ当該管理空域に進入してから退出するまでの全時間についての各経路コストまたは前記各経路コストの合計が最小になるように前記各航空機に対する各四次元最適経路を算出することを特徴とする。
【0021】
第11の発明は、第1から第10のいずれかの発明の航空機の四次元最適経路誘導システムにおいて、前記最適経路計算装置は、前記管理空域内に複数のノードと前記ノード間を結ぶ複数のレグを予め設定し、前記複数のノードにそれぞれ予測コストを予め設定し、前記複数のレグにそれぞれコストを予め設定し、所定の前記ノードをゴールとし、前記航空機が当該管理空域に進入してから前記ゴールに退出するまでの経路の各レグのコストの総和を前記航空機が当該管理空域に進入してから退出するまでの全時間についての経路コストとして算出し、A*アルゴリズムに基づいて、前記各航空機に対して、前記各経路コストがそれぞれ最小になるように当該航空機が当該管理空域に進入してから前記ゴールに退出するまでの全レグを前記四次元最適経路の候補として算出することを特徴とする。
【0022】
第12の発明は、第11の発明の航空機の四次元最適経路誘導システムにおいて、前記ゴールとされる所定のノードは、滑走路に設定されていることを特徴とする。
【0023】
第13の発明は、第11または第12の発明の航空機の四次元最適経路誘導システムにおいて、前記最適経路計算装置は、前記管理空域内に存在する前記複数の航空機に対して優先順位を設定し、前記複数の航空機がA*アルゴリズムに基づいて前記各四次元最適経路の候補として算出された各レグに沿ってそれぞれ進行した場合に、前記航空機同士のコンフリクトが発生する場合には、前記優先順位が上位の航空機の前記四次元最適経路の候補を維持し、前記優先順位が下位の航空機については、当該航空機がコンフリクトを生じる前記レグまたは前記ノードを通らないという条件下で、再度A*アルゴリズムに基づいて前記四次元最適経路の候補を算出することを特徴とする。
【0024】
第14の発明は、第13の発明の航空機の四次元最適経路誘導システムにおいて、前記最適経路計算装置は、前記複数の航空機に対する前記優先順位を設定し、前記複数の航空機がA*アルゴリズムに基づいて前記各四次元最適経路の候補として算出された各レグに沿ってそれぞれ進行した場合に、前記航空機同士のコンフリクトが発生する場合には、前記優先順位が上位の航空機の前記四次元最適経路の候補を維持し、前記優先順位が下位の航空機については前記条件下で再度A*アルゴリズムに基づいて前記四次元最適経路の候補を算出し、前記航空機同士のコンフリクトが発生しない解が得られた場合には、前記解において前記各航空機に対して算出された前記各四次元最適経路の候補を、解である前記各四次元最適経路として算出することを特徴とする。
【0025】
第15の発明は、第13の発明の航空機の四次元最適経路誘導システムにおいて、前記最適経路計算装置は、前記複数の航空機に対する前記優先順位を設定し、前記複数の航空機がA*アルゴリズムに基づいて前記各四次元最適経路の候補として算出された各レグに沿ってそれぞれ進行した場合に、前記航空機同士のコンフリクトが発生する場合には、前記優先順位が上位の航空機の前記四次元最適経路の候補を維持し、前記優先順位が下位の航空機については前記条件下で再度A*アルゴリズムに基づいて前記四次元最適経路の候補を算出して、前記各航空機がそれぞれ当該管理空域に進入してから退出するまでの全時間についての各経路コストの合計を算出し、前記各経路コストの合計を算出する処理を、前記複数の航空機に対する前記優先順位を入れ替えながら繰り返して、算出された前記各経路コストの合計が最小となる前記各四次元最適経路の候補を、解である前記各四次元最適経路として算出することを特徴とする。
【0026】
第16の発明は、第15の発明の航空機の四次元最適経路誘導システムにおいて、
前記最適経路計算装置は、前記複数の航空機に対する前記優先順位を設定し、前記複数の航空機がA*アルゴリズムに基づいて前記各四次元最適経路の候補として算出された各レグに沿ってそれぞれ進行した場合に、前記航空機同士のコンフリクトが発生しない場合には、前記各航空機に対して算出された前記各四次元最適経路の候補を、解である前記各四次元最適経路として算出することを特徴とする。
【0027】
第17の発明は、第13から第16のいずれかの発明の航空機の四次元最適経路誘導システムにおいて、前記最適経路計算装置は、前記管理空域に新たに航空機が進入する場合には、前記新たに進入する航空機を含めた前記管理空域内に存在する全ての前記航空機について、再度、前記優先順位を設定して、前記各航空機に対する前記各四次元最適経路の候補を算出することを特徴とする。
【0028】
第18の発明は、第13から第17のいずれかの発明の航空機の四次元最適経路誘導システムにおいて、前記最適経路計算装置は、前記送受信装置を介して前記航空機から緊急報告を受信した場合には、前記緊急報告を発信した当該航空機の前記優先順位を最上位に固定して、前記各航空機に対する前記各四次元最適経路の候補を算出することを特徴とする。
【0029】
第19の発明は、第13から第18のいずれかの発明の航空機の四次元最適経路誘導システムにおいて、
前記最適経路計算装置が算出した前記複数の航空機に対する前記各四次元最適経路を画面上に表示する表示手段を有し、前記最適経路計算装置に対して特定の航空機に対する四次元最適経路の変更を指令可能な経路変更指令生成装置を備え、
前記最適経路計算装置は、前記経路変更指令生成装置から前記四次元最適経路の変更の指令を受けた場合には、変更された経路を変更しない条件下で、前記経路が変更されなかった航空機に対して前記優先順位を設定して、前記各航空機に対する前記各四次元最適経路の候補を算出することを特徴とする。
【0030】
第20の発明は、第13から第19のいずれかの発明の航空機の四次元最適経路誘導システムにおいて、前記最適経路計算装置は、前記管理空域内の制限空域の設定が時間的に変更される場合、前記制限空域の設定が変更される以前と以後の前記管理空域についてそれぞれ前記複数のノードと前記複数のレグの組み合わせを予め用意しておき、前記制限空域の設定が変更された段階で、変更された前記設定に対応する前記組み合わせに基づいて前記各航空機に対する前記各四次元最適経路の候補を算出することを特徴とする。
【0031】
第21の発明は、第13から第19のいずれかの発明の航空機の四次元最適経路誘導システムにおいて、前記最適経路計算装置は、前記管理空域内の制限空域の設定が時間的に変更される場合、前記制限空域内にも予め単数または複数のノードとそれらを結ぶ単数または複数のレグを設定しておき、前記制限空域が設定された段階で、前記制限空域を仮想的に前記優先順位が最上位の航空機として扱って、前記各航空機に対する前記各四次元最適経路の候補を算出することを特徴とする。
【発明の効果】
【0032】
第1の発明によれば、例えばA*アルゴリズムのような最適化手法を用いて管理空域内に進入した複数の航空機に対してそれぞれ四次元最適経路を算出し、コンフリクトを生じる場合には、複数の航空機に優先順位を設定して下位の航空機の経路を迂回させる等の手法を用いることで、航空機同士のコンフリクトを防止する。そして、そのうえで、複数の航空機の管理空域に進入してから滑走路に着陸するなどして管理空域から退出するまでの全時間についての各飛行距離等の各経路コストが最小になるように各航空機に対する各四次元最適経路を算出することで、管理空域内に存在する全航空機の経路を最適化する。
【0033】
そのため、航空機同士のコンフリクトの回避を重視する管制官の管制業務を的確に支援することが可能となるとともに、各航空機が管理空域に進入してから滑走路に着陸するなどして当該管理空域から退出するまでの全時間における最適性が保証され、管制官がそれらを全体的に把握して、総合的に管理することが可能となる。また、それとともに、各航空機に対して合理的な四次元最適経路を算出して迅速に送信することが可能となる。
【0034】
第2の発明によれば、例えばA*アルゴリズムのような最適化手法を用いて管理空域内に進入した複数の航空機に対してそれぞれ四次元最適経路を算出し、コンフリクトを生じる場合には、複数の航空機に優先順位を設定して下位の航空機の経路を迂回させる等の手法を用いることで、航空機同士のコンフリクトを防止する。そして、そのうえで、複数の航空機の管理空域に進入してから滑走路に着陸するなどして管理空域から退出するまでの全時間についての各飛行距離等の各経路コストの合計が最小になるように各航空機に対する各四次元最適経路を算出することで、管理空域内に存在する全航空機の経路を全体的に最適化する。
【0035】
そのため、航空機同士のコンフリクトの回避を重視する管制官の管制業務を的確に支援することが可能となるとともに、各航空機が管理空域に進入してから滑走路に着陸するなどして当該管理空域から退出するまでの全時間における最適性が保証され、管制官がそれらを全体的に把握して、総合的に管理することが可能となる。また、各航空機に対して最も合理的な四次元最適経路を算出して送信することが可能となる。
【0036】
第3の発明によれば、前記各発明の効果に加え、航空機が管理空域に進入してから退出するまでの全時間についての経路コストを、当該航空機が管理空域に進入してから退出するまでの全飛行距離とすることで、各航空機が各自に対して算出された四次元最適経路に沿って飛行した場合に、管理空域内に存在する各航空機の飛行距離または全航空機の飛行距離の合計が最小となり、航空機同士のコンフリクトが発生しない四次元最適経路を各航空機に対してそれぞれ算出することが可能となる。
【0037】
第4の発明によれば、前記各発明の効果に加え、航空機が管理空域に進入してから退出するまでの全時間についての経路コストを、当該航空機が管理空域に進入してから退出するまでの全飛行時間とすることで、各航空機が各自に対して算出された四次元最適経路に沿って飛行した場合に、管理空域内に存在する各航空機の飛行時間または全航空機の飛行時間の合計が最小となり、航空機同士のコンフリクトが発生しない四次元最適経路を各航空機に対してそれぞれ算出することが可能となる。
【0038】
第5の発明によれば、前記各発明の効果に加え、航空機が管理空域に進入してから退出するまでの全時間についての経路コストを、当該航空機が管理空域に進入してから退出するまでの全燃料消費量とすることで、各航空機が各自に対して算出された四次元最適経路に沿って飛行した場合に、管理空域内に存在する各航空機の燃料消費量または全航空機の燃料消費量の合計が最小となり、航空機同士のコンフリクトが発生しない四次元最適経路を各航空機に対してそれぞれ算出することが可能となる。
【0039】
第6の発明によれば、航空機同士のコンフリクトが生じる場合に、一方の航空機の経路を変更して航空機同士のコンフリクトを回避するようにして各経路コストまたは各経路コストの合計が最小になるように各航空機に対する各四次元最適経路を算出することで、航空機同士のコンフリクトを的確に回避して航空機同士のコンフリクトがない状態で四次元最適経路を算出することが可能となる。また、そのため、航空機同士の異常接近や空中衝突が的確に回避される経路を設定することが可能となるため、管制官がその結果を信頼し、安心して航空管制業務を行うことが可能となり、前記各発明の効果がより的確に発揮される。
【0040】
第7の発明によれば、管理空域に新たに航空機が進入する場合に、その新たに進入する航空機を含めた全航空機について再度各四次元最適経路を算出することで、新たに進入する航空機に対する四次元最適経路を算出することが可能となるとともに、管理空域内にすでに存在する航空機と新たに進入する航空機とのコンフリクトが発生することを未然に防止して、コンフリクトが発生しないことが確実な状態で各航空機に対する四次元最適経路を算出することが可能となり、前記各発明の効果が的確に発揮される。
【0041】
第8の発明によれば、燃料の残量が乏しくなった、故障やトラブルが発生した等のインシデントが発生した航空機がある場合に、当該航空機を優先してその航空機自体の経路コストが最小となるように経路を算出し、その条件下で、再度、各航空機に対してそれぞれ四次元最適経路を算出することで、インシデントが発生した航空機を最優先で滑走路に着陸させる等して管理空域から迅速かつ適切に退出させる経路を管制官に示すことが可能となり、インシデントの発生に対して管制官に的確に対応させることが可能となる。また、それとともに、他の航空機にはその条件の下での最適な経路を算出して指示することが可能となり、前記各発明の効果が的確に発揮される。
【0042】
第9の発明によれば、前記各発明の効果に加え、経路変更指令生成装置の表示手段の画面上に最適経路計算装置が算出した複数の航空機に対する各四次元最適経路が表示されるため、管制官が管理空域を飛行する複数の航空機の飛行状況等を容易に監視することが可能となり、経路変更が必要か否かを的確に判断することが可能となる。また、経路変更指令生成装置により最適経路計算装置に対して特定の航空機に対する四次元最適経路の変更を指令することが可能となるため、管制官が、自ら判断した場合や管理空域を飛行中の航空機から経路変更の要求を受けた場合などに、経路変更指令生成装置を操作して特定の航空機に対する四次元最適経路を的確に変更することが可能となる。
【0043】
第10の発明によれば、管制官による経路変更があった場合に、その変更された経路を固定した状態で最適化を行うため、算出された四次元最適経路が管制官の変更要求に的確に対応するものとなると同時に、他の航空機の経路を最適化することが可能となり、前記各発明の効果が的確に発揮される。
【0044】
第11の発明によれば、前記各発明の効果に加え、管理空域内に複数のノードと複数のレグを設定するなどして、A*アルゴリズムに用いて各航空機に対する四次元最適経路を算出するように構成することで、必要な選択ノードの候補のみを展開して演算を行うため、遺伝的アルゴリズムやいわゆる総当りで最適経路探索を行う場合のように演算を行う必要のない経路についてまで演算を行うことがなく、演算時間を大幅に短縮することが可能となる。
【0045】
また、A*アルゴリズムを用いれば、以前の演算結果を後の演算に用いることが可能となるため、再度の演算が不要となり、その点でも演算の高速化を図ることができる。そのため、各航空機に対する各四次元最適経路の算出をサブ秒〜数秒程度で行うことが可能となり、非常に迅速に四次元最適経路を算出して各航空機に送信することが可能となる。
【0046】
さらに、A*アルゴリズムによる各四次元最適経路の算出結果から容易かつ的確に航空機同士のコンフリクト発生の有無を確認することが可能となる。また、例えば特定のノードを選択しない等の条件を容易に付加して演算を行うことができるため、インシデントや経路変更の要求等の新たな条件が課された場合にも、それらの条件を付加してA*アルゴリズムを複合的に用いることで、容易に条件を付加して演算を行うことが可能となり、種々の条件に対応する最適解を的確に算出することが可能となる。
【0047】
第12の発明によれば、A*アルゴリズムにおけるゴールのノードを滑走路に設定することで、複数の航空機が管理空域に進入して滑走路に着陸する場合の各航空機に対する四次元最適経路を的確に算出することが可能となり、そのような場合における前記各発明の効果が的確に発揮される。
【0048】
第13の発明によれば、A*アルゴリズムを用いて複数の航空機に対する四次元最適経路を算出する際に、管理空域内に存在する複数の航空機に対して優先順位を設定し、航空機同士のコンフリクトが発生する場合に、優先順位が上位の航空機の四次元最適経路の候補を維持し、優先順位が下位の航空機について当該航空機がコンフリクトを生じるレグやノードを通らないという条件下で再度A*アルゴリズムに基づいて四次元最適経路の候補を算出するというようにA*アルゴリズムを複合的に用いることで、航空機同士のコンフリクトを的確に回避して航空機同士のコンフリクトがない状態で各航空機に対して適切な四次元最適経路を算出することが可能となる。また、そのため、航空機同士の異常接近や空中衝突が的確に回避される経路を設定することが可能となるため、管制官がその結果を信頼し、安心して航空管制業務を行うことが可能となり、前記各発明の効果がより的確に発揮される。
【0049】
第14の発明によれば、複数の航空機に対して優先順位を設定してA*アルゴリズムに基づいて各四次元最適経路の候補を算出し、航空機同士のコンフリクトが発生する場合には、上記の条件下で再度A*アルゴリズムに基づいて四次元最適経路の候補を算出し、航空機同士のコンフリクトが発生しない解が得られた場合には、それらの各四次元最適経路の候補を各四次元最適経路として算出することで、各航空機に対して合理的な四次元最適経路を算出して迅速に送信することが可能となり、前記各発明の効果が的確に発揮される。
【0050】
第15の発明によれば、複数の航空機に対して優先順位を設定してA*アルゴリズムに基づいて各四次元最適経路の候補を算出し、航空機同士のコンフリクトが発生する場合には、上記の条件下で再度A*アルゴリズムに基づいて四次元最適経路の候補を算出して、各航空機がそれぞれ当該管理空域に進入してから退出するまでの全時間についての各経路コストの合計を算出する処理を、優先順位を入れ替えながら繰り返して、算出された各経路コストの合計が最小となる各四次元最適経路の候補を各四次元最適経路として算出することで、各航空機に対して最も合理的な四次元最適経路を算出して送信することが可能となり、前記各発明の効果が的確に発揮される。
【0051】
第16の発明によれば、算出された四次元最適経路の候補は各航空機の経路コストが最小となる経路であり、それに沿って各航空機がそれぞれ進行した場合にコンフリクトがまったく生じないのであれば、各航空機の優先順位を入れ替えて再度A*アルゴリズムを用いて四次元最適経路を算出しても航空機の経路変更等は生じないから、同じ結果が得られるだけである。そのため、航空機同士のコンフリクトが発生しない場合には再度の算出を行わなくてもよい。
【0052】
そのため、前記各発明の効果に加え、優先順位を設定して最初にA*アルゴリズムを用いて四次元最適経路を算出した際に航空機同士のコンフリクトがまったく発生しない場合には、各航空機に対して算出された各四次元最適経路の候補を即座に解である前記各四次元最適経路として算出することが可能であり、このように構成することで四次元最適経路の算出に要する時間の短縮を図ることが可能となる。
【0053】
第17の発明によれば、管理空域に新たに航空機が進入する場合に、その新たに進入する航空機を含めた全航空機について優先順位を設定して再度各四次元最適経路を算出することで、新たに進入する航空機に対する四次元最適経路を算出することが可能となるとともに、管理空域内にすでに存在する航空機と新たに進入する航空機とのコンフリクトが発生することを未然に防止して、コンフリクトが発生しないことが確実な状態で各航空機に対する四次元最適経路を算出することが可能となり、前記各発明の効果が的確に発揮される。
【0054】
第18の発明によれば、インシデントが発生した航空機がある場合に、当該航空機の優先順位を最上位に固定してその航空機自体の経路コストが最小となるように経路を算出し、その条件下で、再度、各航空機に対してそれぞれ四次元最適経路を算出することで、インシデントが発生した航空機を最優先で滑走路に着陸させる等して管理空域から迅速かつ適切に退出させる経路を管制官に示すことが可能となり、インシデントの発生に対して管制官に的確に対応させることが可能となる。また、それとともに、他の航空機にはその条件の下での最適な経路を算出して指示することが可能となり、前記各発明の効果が的確に発揮される。
【0055】
第19の発明によれば、管制官による経路変更があった場合に、その変更された経路を固定した条件下で、他の経路が変更されなかった航空機に対して優先順位を設定して最適化を行うため、算出された四次元最適経路が管制官の変更要求に的確に対応するものとなると同時に、他の航空機の経路を最適化することが可能となり、前記各発明の効果が的確に発揮される。
【0056】
第20の発明によれば、前記各発明の効果に加え、管理空域内の制限空域の設定が時間的に変更される場合に、制限空域の設定が変更される前後のノードとレグの組み合わせをそれぞれ予め用意しておき、制限空域の設定の変更にあわせて組み合わせを変えることで、制限空域の設定が変更される前後の状況に応じてそれぞれ適切に四次元最適経路を算出することが可能となる。
【0057】
第21の発明によれば、前記各発明の効果に加え、管理空域内の制限空域の設定が時間的に変更される場合に、航空機が制限空域内に進入できないことと航空機が他の航空機とコンフリクトすることを同様に解して、制限空域内にも予めノードとレグを設定しておき、制限空域が設定された段階で制限空域を仮想的に優先順位が最上位の航空機として扱うことで、制限空域よりの優先順位が下位の航空機に対しては、制限空域とのコンフリクトを避けるような、すなわち制限空域に進入しないような四次元最適経路が算出されるようになるため、算出される四次元最適経路は各航空機が制限空域内のノードやレグを通らない経路となる。このように、第21の発明によれば、航空機同士のコンフリクト回避のロジックを利用して、各航空機が制限空域に進入しないような四次元最適経路を算出するように構成することが可能となる。
【発明を実施するための最良の形態】
【0058】
以下、本発明に係る航空機の四次元最適経路誘導システムの実施の形態について、図面を参照して説明する。
【0059】
[第1の実施の形態]
[全体構成]
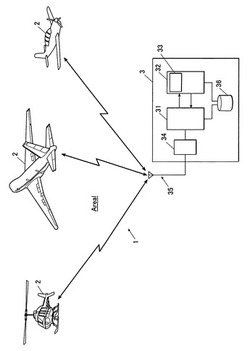
第1の実施形態に係る航空機の四次元最適経路誘導システム1は、図1に示すように、大型機や小型機、ヘリコプタ等の管理空域Arealに進入してくる各航空機2からそれぞれ発信される機体情報を受信する地上局3を備えている。そして、地上局3で、管理空域Areal内に存在する全ての航空機2について、航空機2同士のコンフリクトがないという条件下でそれぞれ四次元最適経路をそれぞれ算出し、算出した各四次元最適経路を各航空機2にそれぞれ送信して指令するようになっている。
【0060】
その際、地上局3は、航空機2が管理空域Arealに進入してから退出するまでの全時間についての経路コストという概念を導入する。そして、各航空機2についてそれぞれ経路コストを算出して、航空機2同士のコンフリクトがないという条件下で各航空機2の各経路コストが最小となるように各航空機2に対してそれぞれ四次元最適経路を算出するようになっている。経路コストおよびその算出方法については、後で詳しく説明する。
【0061】
ここで、四次元最適経路とは、それが各航空機2に対して管理空域Areal内に三次元的に指定される所定のウェイポイントをそれぞれ所定の時刻に通過せよという形で指定されることを意味している。また、管理空域Arealとは、地上局3が管理する空域をいう。なお、地上局3が管理する管理空域Arealは、いわゆる航空路管制機関(Area Control Center:ACC)が管轄する管制空域である場合も含むが、それに限定されない。
【0062】
また、地上局3が管理する管理空域Arealに、航空機2が離着陸する滑走路が含まれる場合には、当該滑走路から離陸する航空機2は管理空域Arealに進入する航空機として扱われ、また、当該滑走路に着陸する航空機2は管理空域Arealから退出する航空機として扱われるようになっている。以下、管理空域Arealに滑走路が存在する場合について説明するが、本発明は管理空域Arealに滑走路が存在する場合に限定されない。
【0063】
[航空機]
各航空機2には、コンピュータで構成される図示しない機上計算装置がそれぞれ搭載されており、各航空機2は、常時或いは地上局3からの送信要求に応じて当該航空機2の三次元の位置(緯度、経度、高度)の情報、対地速度、機体番号等の機体情報を図示しない送受信装置を介して地上局3に送信するようになっている。また、各航空機2は、地上局3から各航空機2に対する四次元最適経路が送信されてくると、それに従って管理空域Areal内を飛行するようになっている。
【0064】
また、各航空機2には、異常接近や空中衝突を防止するために、当該航空機2の機種や当該航空機2が備えている装備等に応じて当該航空機2からの保護領域半径や高度閾値等で規定される三次元的な保護閾値がそれぞれ設定されるようになっている。
【0065】
[地上局]
地上局3は、図1に示すように、最適経路計算装置31と、表示手段33を有する経路変更指令生成装置32と、アンテナ35を有する送受信装置34とを備えている。また、最適経路計算装置31と経路変更指令生成装置32には共通の或いはそれぞれ記憶手段36が接続されている。記憶手段36には、機体番号と、機体番号で規定される航空機2の機種や備えている装備等とを対応付けるテーブルや、機種と保護閾値とを対応付けるテーブル等が格納されている。
【0066】
最適経路計算装置31は、例えば管制卓のコンピュータ内に構築されている。最適経路計算装置31のコンピュータ内の仮想空間には、地上局3が管理する管理空域Arealが再現されている。以下、仮想空間上に再現された管理空域を管理空域Aという。
【0067】
実際の管理空域Arealには、管理空域Areal内の三次元の点で表される複数のウェイポイントが設定されており、航空機2は、これらのウェイポイントを目印として管理空域Areal内を進行するようになっている。最適経路計算装置31の管理空域Aでは、例えば図2に示すように、これらのウェイポイントに対応する管理空域A上の位置に各ノードNがそれぞれ設定されている。なお、管理空域A上では、各ノードNはそれぞれ実際の管理空域Areal内の対応するウェイポイントの緯度、経度、高度の3成分を有する仮想空間上の三次元的な点として定義されている。
【0068】
管理空域A中の複数のノードNは、複数のレグLで結ばれており、各レグLは、管理空域Areal上でウェイポイント間を結ぶレグに対応するように設定されている。すなわち、仮想空間上の管理空域Aでは航空機は各レグLに沿って進行するようになっている。
【0069】
図2に示す管理空域Aでは、航空機2の管理空域Aへの進入ルートはノードNa、Nb、Ncを通過する3ルートがあり、ノードNa、Nb、Ncを通過して管理空域A内に進入した航空機は、各レグLに沿って進行して滑走路Sに至るようになっている。また、図2の例では、各レグLは、各ルートから進入した航空機が滑走路Sに到達する最短経路を表すレグLmと、迂回して滑走路Sに到達する迂回路を表すレグLdと、最短経路のノードNと迂回路のノードN或いは各迂回路のノードN間を結ぶバイパスを表すレグLbの3種類のレグの組み合わせで構成されている。
【0070】
最適経路計算装置31は、このように設定された管理空域Aにおいて、管理空域A内に存在する全ての航空機(すなわち実際の管理空域Areal内に存在する全ての航空機2)についてそれぞれ四次元最適経路をそれぞれ算出するようになっているが、これについては後で詳しく説明する。
【0071】
最適経路計算装置31は、算出した各航空機に対する各四次元最適経路を、送受信装置34を介して各航空機2に送信するとともに、経路変更指令生成装置32に送信するようになっている。
【0072】
経路変更指令生成装置32は、CRT(Cathode Ray Tube)等で構成される表示手段33を備えたコンピュータで構成されている。表示手段33の画面上には、図2に示した管理空域Aと同様の模式化された管理空域の画像が表示されるようになっており、管理空域Areal内を飛行している各航空機2から送信されてくる三次元の位置の情報に基づいて、各航空機2がその緯度、経度に対応する画像上の位置に表示されるようになっている。
【0073】
また、各航空機の表示には、機体番号が付随して表示されるとともに、各航空機の対地速度に応じた長さの矢印がその進行方向を向くように表示されるようになっており、管制官等がそれらの表示を見て、航空機の現在位置や進行方向、対地速度、機種等を把握することができるようになっている。
【0074】
さらに、経路変更指令生成装置32の表示手段33の画面上には、図2に示した管理空域Aと同様に各ノードNやそれらを結ぶ各レグLが表示されるようになっており、最適経路計算装置31が各航空機について算出した各四次元最適経路がそれぞれ画面上に表示されるようになっている。
【0075】
経路変更指令生成装置32には、マウスやキーボード等の図示しない入力手段が備えられており、管制官等のオペレータが入力手段を操作して、表示手段33の画面を見ながら、単数または複数の特定の航空機に対する四次元最適経路を変更することができるようになっている。このように、経路変更指令生成装置32は、最適経路計算装置31が各航空機について算出した各四次元最適経路を管制官等に表示するとともに、管制官等のオペレータがそれを変更することを可能とする、いわばインターフェースとして機能している。
【0076】
送受信装置34は、アンテナ35を介して各航空機2から送信されてくる各機体情報を受信して、それらの機体情報を最適経路計算装置31や経路変更指令生成装置32に送信するとともに、最適経路計算装置31が算出した各四次元最適経路を、管理空域Arealを飛行中の各航空機2に対してそれぞれ送信するようになっている。
【0077】
以下、最適経路計算装置31における各航空機に対する四次元最適経路の算出処理について説明する。
【0078】
本実施形態では、各航空機に対する四次元最適経路の算出には、上記のように複数のノードNとノードN間を結ぶ各レグLが設定されている場合に、あるスタートのノードからゴールのノードまでの例えば最短距離を探索するのに適したA*アルゴリズムが用いられるようになっている。以下、A*アルゴリズムについて簡単に説明する。なお、各航空機に対する四次元最適経路の算出に用いられるアルゴリズムはA*アルゴリズムには限定されるものではなく、他のアルゴリズムを用いて構成することも可能である。
【0079】
図2の各ノードNや各レグLは組み合わせが複雑であるので、より簡略化された図3の各ノードや各レグの組み合わせに基づいて説明する。また、以下では、ノードAをスタートしてノードHのゴールに至る最短経路を探索して決定する場合について説明する。
【0080】
各ノードA〜Hの位置は空間上に固定されており、また、各ノードA〜Hを結ぶレグすなわち通過可能なノード間経路も決まっている。すなわち、他のノードを経由せずに例えばノードAから直接ノードDに移動することはできない。また、各レグの実際の距離(コスト)は各レグの側に記載された数字のように予め分かっているものとする。
【0081】
A*アルゴリズムでは、このように設定された各ノードA〜Hに対してそれぞれ予測コスト(ヒューリスティック)h(n)が与えられる点に特徴がある。予測コストは、例えば各ノードA〜Hの側に括弧内に記載された数値が与えられる。そして、g(n)をそのノードに至るまでの各レグの距離の和とすると、
f(n)=g(n)+h(n) …(1)
で表されるf(n)が最小になるように経路を選択していくことで、最短経路を見出すことができる。
【0082】
具体的には、ノードAからはノードB、C、Eに至る各レグを選択することが可能であるが、ここで、各レグを選択する際のf(n)を上記(1)式に従って計算する。すると、図4に示すように、f(B)、f(C)、f(E)はそれぞれ8、5、11と計算されるため、f(n)が最小のノードCに至るレグが選択される。続いて、ノードCからはノードA、B、D、Eに至る各レグを選択することが可能であり、各f(n)を上記(1)式に従って計算すると、f(A)、f(B)、f(D)、f(E)はそれぞれ10、8、6、16と計算されるため、f(n)が最小のノードDに至るレグが選択される。
【0083】
そして、ノードDからはノードC、E、F、Hに至る各レグを選択することが可能であり、f(n)が最小となるノードHに至るレグが選択されてゴールのノードHに至る。このように、この場合は、図5に示すように、A→C→D→Hと進む経路が最短経路として見出される。
【0084】
A*アルゴリズムにおける上記の処理をフローチャートで示すと、図6に示すように、まず、スタートのノードAを選択ノードとし(ステップS1)、次の選択ノードの候補、すなわち上記の例ではノードB、C、Eをメモリ上に展開する(ステップS2)。そして、各候補について上記(1)式に従ってf(n)を計算し、f(n)が最小となるノードを選択ノードとする(ステップS3)、選択ノードがゴールのノードHでなければ(ステップS4;NO)、ステップS2〜S4の処理を繰り返し、選択ノードがゴールのノードHとなった時点で(ステップS4;YES)、探索を終了するという処理手順で表される。
【0085】
A*アルゴリズムでは、各予測コストh(n)を厳密に決定する必要はなく、各ノードA〜HからゴールのノードHに至る現実の最短経路の各レグの距離(コスト)の和、すなわち例えばノードAであればA→C→D→Hと進む経路の各レグの和2+2+3=7、ノードEであればE→D→Hと進む経路の各レグの距離の和7+3=10を越えない値に設定すれば、上記の仕方で見出された経路が最短の経路であることが数学的に保証されている。
【0086】
例えばレグ間距離をコストとする場合、予測コスト(ヒューリスティック)h(n)は各ノードからゴールまでの直線距離とすることが多い。例えばノードCからゴールのノードHまでの実際の距離(コスト)は、C→D→Hと進む距離5であるが、予測コスト(ヒューリスティック)h(n)をゴールのノードHまでの直線距離とすれば、予測コスト(ヒューリスティック)h(n)は必ず5以下となり、解の最適性が数学的に保証されるからである。
【0087】
本実施形態においても、これと同様に、図2に示した各ノードN間の現実の距離を算出して距離が各レグの距離(コスト)として予め設定されており、それらの距離に基づいて各ノードNにそれぞれ予測コストh(n)が予め設定されている。
【0088】
そして、本実施形態では、各航空機に対する四次元最適経路の算出は、各航空機の現在位置に基づいて直後に到達するノードをそれぞれスタートのノードとし、滑走路S(図2参照)上のノードをゴールのノードとして、基本的にA*アルゴリズムを用いて算出するようになっている。
【0089】
すなわち、本実施形態では、前述した航空機2が管理空域Arealに進入してから退出するまでの全時間についての経路コストとして、当該航空機が管理空域Areal(または管理空域A。以下同じ)に進入してから退出するまでの全飛行距離、すなわち当該航空機が管理空域Arealに進入してからゴールである滑走路Sに着陸するまでの経路の全レグの各コスト(実際の距離)の総和を考える。そして、A*アルゴリズムを用いて当該経路コストが最小になるように、すなわちスタートのノードからゴールのノードである滑走路Sのノードまでの最短の経路を算出して、それを当該航空機の四次元最適経路とする。
【0090】
しかし、各航空機に対する各四次元最適経路が算出されたとしても、実際にその四次元最適経路に沿って各航空機が飛行した場合、航空機同士の異常接近や空中衝突、すなわちコンフリクトが生じてしまう可能性がある。そのため、単純にA*アルゴリズムを用いて各航空機に対して四次元最適経路を算出するだけでは必ずしも十分ではない。
【0091】
そこで、本実施形態では、上記のようにA*アルゴリズムを用いて算出された各航空機の四次元最適経路を、求める四次元最適経路の候補としたうえで、各航空機をそれぞれの現在位置から進行させてコンフリクトが生じるか否かを判定するようになっている。
【0092】
なお、本実施形態では、各レグを飛行する各航空機の対地速度を機種ごとに予め設定しておき、それに基づいて各航空機を各レグ上を移動させてコンフリクト判定を行う場合が想定されているが、例えば各航空機が順調に飛行し得る対地速度の範囲を予め設定しておき、その範囲内での対地速度の変動可能とする条件下でA*アルゴリズムを適用して各レグにおける対地速度も算出するように構成することも可能である。
【0093】
また、本実施形態では、前述した記憶手段36に格納されている機種と保護閾値とを対応付けるテーブル等を参照して、最適経路計算装置31の仮想空間上の管理空域Aの各航空機に対して保護閾値を設定し、各航空機をそれぞれの現在位置から進行させた場合に経路上で航空機同士の各保護閾値が接したり重なり合ったりする場合に航空機同士のコンフリクトが生じると判定するようになっている。
【0094】
例えば、図5の例で言えば、図7に示すように、ノードA、C間のレグ上を大型機2aが飛行し、ノードC、D間のレグ上を大型機2bが飛行していても、大型機2a、2bの対地速度はさほど違わないため、大型機2aが大型機2bに追いつくことはなく、各保護閾値Ra、Rbが接したり重なり合ったりすることはない。
【0095】
すなわち、この場合は、各機2a、2bはともにゴールである滑走路SのノードHにコンフリクトすることなく到達できるため、A→C→D→Hの経路を各機2a、2bの各四次元最適経路として採用することができる。なお、図7〜図9では航空機2a〜2cが実際の縮尺より非常に大きく表現されており、それらと各保護閾値Ra〜Rcとの相対的な大きさは実際の相対的な大きさを反映するものではない。
【0096】
しかし、例えば図8に示すように、大型機2aの前方のノードC、D間のレグ上を飛行する航空機が小型機2cであると、大型機2aの対地速度は小型機2cの対地速度より速いため、例えば図9に示すように、例えばノードD、H間のレグ上で大型機2aが小型機2cに追いつき各保護閾値Ra、Rcが接してしまい、コンフリクトが発生する。そのため、この場合は、大型機2aか小型機2cのいずれか一方の航空機の経路を変更して航空機同士のコンフリクトを回避しなければならない。
【0097】
本実施形態では、このような場合、各航空機がそれぞれ管理空域Aに進入してから退出するまでの全時間についての各経路コストの合計、すなわち本実施形態では各航空機ごとに管理空域Aに進入してから滑走路Sに着陸するまでの全飛行距離が経路コストとして算出されるが、その各航空機ごとの飛行距離の全航空機についての合計が最小となるように、各航空機の四次元最適経路が算出されるようになっている。
【0098】
すなわち、各航空機ごとに見た場合には多少大回りの経路になるとしても、航空機同士のコンフリクトが回避されるという条件下で管理空域A内に存在する航空機ごとの飛行距離が全体として最小になるような経路が、各航空機に対してそれぞれ四次元最適経路として算出されるようになっている。
【0099】
全体的な経路コストを最小にする手法として、本実施形態では、管理空域A内に存在する複数の航空機に対して優先順位を設定し、各航空機がそれぞれ上記のA*アルゴリズムに基づいて四次元最適経路の候補として算出された各レグに沿って進行した場合に航空機同士のコンフリクトが発生する場合には、優先順位が上位の航空機の四次元最適経路の候補の経路を維持し、優先順位が下位の航空機は、その航空機がコンフリクトを生じるレグやノードを通らないという条件下で再度A*アルゴリズムに基づいて四次元最適経路の候補を算出するという手法が採用されている。
【0100】
具体的には、最適経路計算装置31は、管理空域A内に存在する複数の航空機に対して後述するような特別の事情がなければ、複数の航空機に対して任意に優先順位を設定して、上記の要領でA*アルゴリズムに基づいて航空機に対する四次元最適経路の候補を算出する。前述した図6のフローチャートに基づいて説明すれば、ステップS2の次の選択ノードの候補の展開において、優先順位が上位の航空機における算出では現在の選択ノードから展開し得る全てのノードを展開して算出が行われるが、優先順位が下位の航空機における算出ではコンフリクトを生じるノードやコンフリクトを生じるレグを通って到達できるノードを除外した上で展開し得るノードを展開して算出が行われることになる。
【0101】
そして、各航空機ごとの飛行距離を全航空機について合計する。続いて、各航空機に対する優先順位を入れ替えて、再度A*アルゴリズムに基づいて航空機に対する四次元最適経路の候補を算出して、各航空機ごとの飛行距離を全航空機について合計する。そして、優先順位を入れ替えながらこの処理を繰り返し、優先順位入れ替えの全てパターンについてそれぞれ各航空機ごとの飛行距離を全航空機について合計して、合計が最小となる優先順位における各航空機の四次元最適経路の候補を、解である各四次元最適経路として算出するようになっている。
【0102】
なお、管理空域に新たに航空機が進入する場合には、新たに進入する航空機に対する四次元最適経路を算出する必要があり、また、管理空域A内にすでに存在する航空機と新たに進入する航空機とのコンフリクトが発生しないように計算し直す必要がある。そのため、最適経路計算装置31は、管理空域に新たに航空機が進入する場合には、新たに進入する航空機を含めて管理空域A内に存在する全ての航空機について、再度、優先順位を設定して行うA*アルゴリズムに基づいた各航空機に対する各四次元最適経路の算出を行うようになっている。
【0103】
最適経路計算装置31は、以上のようにして、単純にA*アルゴリズムを適用して各航空機に対する各四次元最適経路の候補を算出するだけではなく、その算出結果からコンフリクト発生の有無を確認し、コンフリクトが発生する場合には、新たに条件を付して再度A*アルゴリズムを用いて各航空機に対する各四次元最適経路の候補を算出するようにして、A*アルゴリズムを複合的に用いることで、解である各航空機の四次元最適経路を算出するようになっている。
【0104】
なお、図8や図9に示した例では、他に航空機が存在しなければ、大型機2aと小型機2cの優先順位をいずれを上位としても、一方の航空機にはA→C→D→Hの経路が四次元最適経路として算出され、他方の航空機にはA→C→D→F→G→Hの経路が四次元最適経路として算出されるため、各航空機ごとの飛行距離の航空機全体の合計は、いずれの航空機がいずれの経路を通っても変わらない。そのため、解が一意に決まらない。
【0105】
そこで、このような場合には、他の要件を考慮して各航空機に対する四次元最適経路が決定される。例えば、小型機よりも大型機を優先して滑走路Sに着陸させる場合には、大型機2aにA→C→D→Hの経路を、小型機2cにA→C→D→F→G→Hの経路をそれぞれ四次元最適経路として指示するように構成される。また、例えば、すでに滑走路Sに近い位置にいる航空機を先に着陸させる場合には、小型機2cにA→C→D→Hの経路を、大型機2aにA→C→D→F→G→Hの経路をそれぞれ四次元最適経路として指示するように構成される。例えば、管理空域Areal内に存在する航空機をできるだけ少なくしたい場合にも、対地速度が遅い小型機に長い距離(D→F→G→H)を飛行させるよりも大型機に飛行させた方が短時間で飛行し得るため、後者の経路がそれぞれ指示される。
【0106】
一方、管理空域A内に存在する複数の航空機に対して特別の事情がある場合には、それらの内容を考慮して、優先順位を設定してA*アルゴリズムを行う上記の処理内容等を修正することが必要となる。
【0107】
例えば、管理空域Arealを飛行中の航空機2から、燃料が残り少なくなった、故障やトラブルが発生した等の緊急報告を受信した場合には、当該航空機2を最優先で滑走路Sに着陸させる必要がある。従って、このような場合には、最適経路計算装置31は、緊急報告を発信した当該航空機の優先順位を最上位に固定して、他の航空機の優先順位を入れ替えながら全航空機に対してA*アルゴリズムにより各航空機に対する四次元最適経路を算出するようになっている。
【0108】
このように構成すれば、緊急報告を発信した航空機に対して滑走路Sまでの最短距離である四次元最適経路が的確に算出して、当該航空機を優先して着陸させることが可能となる。
【0109】
また、例えば、管制官等のオペレータが自ら判断したり航空機からの経路変更の要求を受ける等してオペレータが経路変更指令生成装置32を操作して単数または複数の特定の航空機に対する四次元最適経路の変更の指令を行った場合には、オペレータにより変更された特定の航空機に対する四次元最適経路を変更せずに固定した条件下で、それ以外の各航空機の優先順位を入れ替えながら全航空機に対してA*アルゴリズムにより各航空機に対する四次元最適経路を算出するようになっている。
【0110】
このように構成すれば、オペレータにより変更された特定の航空機に対する四次元最適経路を維持した状態で、他の各航空機に対する四次元最適経路を的確に算出することが可能となる。
【0111】
さらに、管理空域Areal内の制限空域は、現時点では範囲が固定された空域として設定されているが、天候や時間帯等によって制限される空域の範囲が変更されることがありうる。そのため、このように制限空域の範囲が天候や時間帯等によって変更される場合、例えば、制限空域の設定範囲が変更される以前と以後のそれぞれについて、管理空域A内における複数のノードNと複数のレグの組み合わせを予め別々に用意しておき、制限空域の設定範囲が変更された段階で、変更された設定範囲に対応する組み合わせに基づいて、各航空機に対する各四次元最適経路を算出するように構成することが可能である。
【0112】
しかし、航空機が制限空域内に進入できないことが、航空機が他の航空機とコンフリクトすることを同視し得ることを利用すれば、各航空機の優先順位を入れ替えながら全航空機に対してA*アルゴリズムにより各航空機に対する四次元最適経路を算出する上記の手法をそのまま用いて航空機が制限空域に進入しないようにすることができる。
【0113】
すなわち、制限空域外だけでなく制限空域内にも予め単数または複数のノードとそれらを結ぶ単数または複数のレグを設定しておき、制限空域が解除されている場合にはそれらのノードやレグも含めて上記の要領で各航空機に対する四次元最適経路を算出し、制限空域が設定された段階で、制限空域を仮想的に優先順位が最上位の航空機として扱い、優先順位を最上位に固定して、上記の要領で各航空機に対する四次元最適経路を算出する。
【0114】
このように構成すれば、制限空域が設定された段階で、制限空域内のノードは、優先順位が下位の航空機が上位の航空機(すなわち制限空域)とのコンフリクトを避けるために通ることができないノードとして扱われて、A*アルゴリズムにおけるノードの選択肢から除外されるため、算出される各航空機に対する四次元最適経路は、各航空機が制限空域内のノードやレグを通らない経路となり、各航空機が制限空域に進入しないようにすることが可能となる。
【0115】
なお、上記の場合、制限空域が設定される段階で、制限空域内のノードに向かうレグ上を航空機が飛行している最中にそのノードが除外されてしまうと、当該航空機は行き場がなくなり、当該航空機の飛行が阻害されるとともに、当該航空機が制限空域への進入を回避しようとしてその周辺にいる航空機の飛行を阻害してしまう可能性がある。そのような事態を避けるため、制限空域が設定される時刻より以前の時刻をもって、制限空域内のノードを除外して、再度A*アルゴリズムによる各航空機に対する四次元最適経路の算出を行うように構成することが好ましい。
【0116】
以上の処理をまとめると、最適経路計算装置31では、図10および図11に示すフローチャートに従って各処理が行われるようになっている。
【0117】
まず、最適経路計算装置31の立ち上がり時等には、管理空域Areal(管理空域A)内に存在する各航空機2に対する四次元最適経路が算出されていないので、最適経路計算装置31は、各航空機2に対する四次元最適経路が算出されていなければ(図10のステップS10;NO)、図11のステップS15以降の各航空機2に対する四次元最適経路の算出フローに移行する。
【0118】
また、すでに各航空機2に対する四次元最適経路が算出されていれば(図10のステップS10;YES)、最適経路計算装置31は、管理空域Arealに新たに進入する航空機があるか(ステップS11)や、管理空域Arealを飛行中の航空機2から緊急報告を受信したか(ステップS12)、経路変更指令生成装置32を介する管制官等のオペレータからの特定の航空機に対する四次元最適経路の変更の指令があったか(ステップS13)、管理空域Areal内の制限空域の設定範囲が変更されるか(ステップS14)をそれぞれ判断する。
【0119】
上記の判断条件のいずれも満たされない場合には(ステップS11〜S14のいずれのNO)、最適経路計算装置31は、ステップS10からステップS14の判断処理を繰り返しながら待機する。また、上記の判断条件のいずれか1つが満たされると(ステップS11〜S14のいずれかYES)、最適経路計算装置31は、図11のステップS15以降の各航空機2に対する四次元最適経路の算出フローに移行する。
【0120】
各航空機2に対する四次元最適経路の算出フローでは、最適経路計算装置31は、各航空機の三次元の位置の情報、対地速度、機体番号等の機体情報を入手していない航空機2があればその航空機2の機体情報を入手し(ステップS15)、管理空域Arealに新たに進入する航空機等の、まだ保護閾値が設定されていない航空機2があれば、記憶手段36に格納されている機種と保護閾値とを対応付けるテーブル等を参照して当該航空機2に対して保護閾値を設定する(ステップS16)。
【0121】
続いて、最適経路計算装置31は、上記のステップS10〜S14の判断処理において付された条件に基づいて管理空域A内に存在する全航空機2に対して優先順位を設定する(ステップS17)。
【0122】
すなわち、上記ステップS10やステップS11の判断処理に基づいてステップS15以降の各航空機2に対する四次元最適経路の算出フローに移行した場合には、全航空機2に対して任意に優先順位を設定する。また、上記ステップS12の判断処理に基づいてステップS15以降の各航空機2に対する四次元最適経路の算出フローに移行した場合には、緊急報告を発信した当該航空機の優先順位を最上位に固定して、他の航空機2に対して任意に優先順位を設定する。
【0123】
さらに、上記ステップS13の判断処理に基づいてステップS15以降の各航空機2に対する四次元最適経路の算出フローに移行した場合には、オペレータにより四次元最適経路が変更された特定の航空機以外の各航空機に対して任意に優先順位を設定する。また、上記ステップS14の判断処理に基づいてステップS15以降の各航空機2に対する四次元最適経路の算出フローに移行した場合には、航空機と見なされた制限空域の優先順位を最上位に固定して、他の航空機2すなわち通常の航空機に対して任意に優先順位を設定する。
【0124】
続いて、最適経路計算装置31は、上記の条件の下で、各航空機2に対して、優先順位を設定して行うA*アルゴリズムに基づいてそれぞれ各四次元最適経路の候補の算出を行う(ステップS18)。
【0125】
この場合、上記ステップS13の判断処理に基づいてオペレータにより四次元最適経路が変更された特定の航空機については、変更された経路が固定されたものとし、改めて四次元最適経路の候補の算出は行われない。また、上記ステップS14の判断処理に基づいて航空機と見なされた制限空域については、優先順位は最上位とされるが、言うまでもなくその四次元最適経路の候補は算出されない。
【0126】
また、本実施形態では、図2の管理空域Aの各ノードNと各ノードNにおける予測コストh(n)とを対応付けるテーブルや各レグLと各レグLの距離(コスト)とを対応付けるテーブルが予め記憶手段36に格納されており、最適経路計算装置31は、上記のA*アルゴリズムに基づく各四次元最適経路の候補の算出においては、それらのテーブルを参照しながら計算を行うようになっている。
【0127】
さらに、前述したように、各航空機がそれぞれA*アルゴリズムに基づいて四次元最適経路の候補として算出された各レグに沿って進行した場合に航空機同士のコンフリクトが発生する場合には、優先順位が上位の航空機の四次元最適経路の候補の経路を維持し、優先順位が下位の航空機は、その航空機がコンフリクトを生じるレグやノードを通らないという条件下で再度A*アルゴリズムに基づいて四次元最適経路の候補を算出する。
【0128】
最適経路計算装置31は、航空機同士のコンフリクトが発生しない解が得られなければ(ステップS19;NO)、すなわち設定した優先順位ではいずれかの航空機同士がコンフリクトを生じてしまう場合には、航空機の優先順位を入れ替えて(ステップS20)、再度ステップS18からの処理を繰り返す。
【0129】
また、最適経路計算装置31は、設定した優先順位において、航空機同士のコンフリクトが発生しない解が得られ(ステップS19;YES)、各機に対してそれぞれ四次元最適経路の候補を算出すると(ステップS21)、続いて、各航空機ごとの四次元最適経路の飛行距離を全航空機について合計する(ステップS22)。
【0130】
そして、各航空機2の優先順位の入れ替えを全パターン行っていなければ(ステップS23;NO)、優先順位を入れ替えて(ステップS24)、ステップS18〜S23の各処理を優先順位の入れ替えの全パターンを終了するまで繰り返す。
【0131】
また、優先順位の入れ替えの全パターンについて算出処理を終了すると(ステップS23;YES)、最適経路計算装置31は、前記合計が最小となる優先順位における各航空機の四次元最適経路の候補を、解である各四次元最適経路として算出して、送受信装置34を介して各航空機2に送信するとともに、経路変更指令生成装置32に送信する(ステップS25)。
【0132】
[効果]
以上のように、本実施形態に係る航空機の四次元最適経路誘導システム1によれば、例えばA*アルゴリズムを用いて管理空域Areal内に進入した複数の航空機2に対してそれぞれ四次元最適経路を算出し、コンフリクトを生じる場合には、複数の航空機2に優先順位を設定して下位の航空機2の経路を迂回させる等の手法を用いることで、航空機同士のコンフリクトを防止する。そして、そのうえで、各航空機の管理空域Arealに進入してから滑走路S等に退出するまでの全時間についての各飛行距離等の各経路コストの合計が最小になるように各航空機に対する各四次元最適経路を算出することで、管理空域Areal内に存在する全航空機の経路を全体的に最適化するように構成した。
【0133】
そのため、航空機2同士のコンフリクトの回避を重視する管制官の管制業務を的確に支援することが可能となるとともに、各航空機2が管理空域Arealに進入してから滑走路Sに着陸するなどして当該管理空域Arealから退出するまでの全時間における最適性が保証され、管制官がそれらを全体的に把握して、総合的に管理することが可能となる。
【0134】
また、インシデントが発生した機体の優先順位を最上位として四次元最適経路の算出を行うことで、当該機体を最優先で滑走路Sに着陸させる等して管理空域Arealから迅速かつ適切に退出させることが可能となる。
【0135】
さらに、管制官等のオペレータによる経路変更があった場合には、その変更された経路を固定した状態で最適化を行うため、算出された四次元最適経路はオペレータの変更要求に応えるものとなるとともに、他の航空機の経路をも同時に最適化されたものとなる。このように、本実施形態に係る航空機の四次元最適経路誘導システム1によれば、インシデントやオペレータによる経路変更に的確に対応することが可能となる。
【0136】
また、A*アルゴリズムを用いて四次元最適経路を算出するように構成することで、図4や図6のフローチャートに示すように、必要な選択ノードの候補のみを展開して(図4や図6のステップS2参照)演算を行うため、遺伝的アルゴリズムやいわゆる総当りで最適経路探索を行う場合のように演算を行う必要のない経路についての演算を行うことがなく、演算時間を大幅に短縮することが可能となる。
【0137】
また、A*アルゴリズムを用いれば、図4に示したような各演算結果を後の演算に用いることが可能となるため、再度の演算が不要となり、その点においても演算の高速化を図ることができる。そのため、管理空域AにおけるノードNの数やレグLの本数、管理空域Aに進入する航空機の機数等にもよるが、各航空機に対する各四次元最適経路の算出をサブ秒〜数秒程度で行うことが可能となり、非常に迅速に四次元最適経路を算出して各航空機に送信することが可能となる。
【0138】
また、A*アルゴリズムを用いれば、上記のようにA*アルゴリズムによる各四次元最適経路の算出結果から容易かつ的確にコンフリクト発生の有無を確認することが可能となる。また、例えば特定のノードを選択しない等の条件を容易に付加して演算を行うことができるため、インシデントや経路変更の要求等の新たな条件が課された場合にも、それらの条件を付加してA*アルゴリズムを複合的に用いることで、容易に条件を付加して演算を行うことが可能となり、種々の条件に対応する最適解を的確に算出することが可能となる。
【0139】
なお、この場合、最初に設定された優先順位の下で行われるA*アルゴリズムに基づく各四次元最適経路の候補の算出において、航空機同士のコンフリクトがまったく発生しない場合には、優先順位を入れ替えての算出を繰り返さずに、算出された各航空機に対する四次元最適経路の候補を解である各四次元最適経路として算出するように構成することが可能である。
【0140】
その理由は、上記の条件で算出された各四次元最適経路の候補は、もともと各航空機に対する最短経路を与えるものであるから、優先順位を入れ替えて再度算出を行っても、各航空機に対して同じ最短経路が算出されるだけであり、同じ結果が得られるからである。
【0141】
そして、このように構成すれば、算出を繰り返さずに即座に解である各四次元最適経路を算出して各航空機に送信することが可能となり、四次元最適経路の算出に要する時間を短縮することが可能となるとともに、迅速に各航空機に四次元最適経路を送信して指示することが可能となる。
【0142】
[第2の実施の形態]
上記の第1の実施形態では、複数の航空機2に対して、各航空機2の管理空域Arealに進入してから滑走路S等に退出するまでの全時間についての各飛行距離等の各経路コストの合計が最小になるように各航空機2に対する各四次元最適経路を算出し、管理空域Areal内に存在する全航空機2の経路を全体的に最適化するような理想的な経路を算出する場合について説明した。
【0143】
しかし、例えば、航空機2が多数存在し、交通量が多いような管理空域Arealにおいて、上記のように、各航空機2に対して優先順位を入れ替えながら繰り返し四次元最適経路の候補を算出して各航空機2の優先順位の入れ替えを全パターン行って全航空機2の経路を全体的に最適化すると、処理に時間がかかり、実際の航空管制には採用し難く、航空機側の迅速に経路を指示してほしいという要望に必ずしも的確に応えられない場合がある。
【0144】
また、上記のように、本発明では、A*アルゴリズム等を用いて、各航空機2に対してそれぞれ算出された例えば最短の経路等の経路コストが最小になるような最適な四次元経路(四次元最適経路)の候補をベースとして、もし航空機同士のコンフリクトがある場合にはその場合にのみ優先順位が下位の航空機2の経路を変更するものである。
【0145】
このように、もともと最適な経路である四次元最適経路をベースとするものであることから、コンフリクトを避けるために経路が変更されるとしても、さほど不合理な経路変更がなされるわけではない。
【0146】
そのため、任意に、或いは所定の要件を考慮して最初に設定した優先順位に従って航空機同士のコンフリクトが発生しない解が得られるのであれば、それに基づく各四次元最適経路を各航空機2に送信して指示しても実際の航空管制上何ら問題はなく、航空機側の迅速な経路指示の要望に的確に応えるものとなる。
【0147】
第2の実施形態は、このような観点から構成されたものである。具体的には、第2の実施形態に係る航空機の四次元最適経路誘導システムは、各航空機2や地上局3等の全体構成は、図1に示した第1の実施形態に係る航空機の四次元最適経路誘導システム1の場合と同様であるが、地上局3の最適経路計算装置31における処理が第1の実施形態の場合と多少異なる。
【0148】
すなわち、本実施形態における最適経路計算装置31では、図10に示したステップS10からステップS14までの判断処理は第1の実施形態の場合と同様に処理されるが、図11に示したステップS15以降の処理が多少異なる。
【0149】
本実施形態では、最適経路計算装置31は、図10のフローチャートにおけるステップS10からステップS14までの判断処理のいずれかにおいて判断条件が満たされると(ステップS11〜S14のいずれかYES)、図12のフローチャートに示す各処理に移行する。
【0150】
そして、最適経路計算装置31は、第1の実施形態と同様に、各航空機の三次元の位置の情報等の機体情報を入手していない航空機2があればその航空機2の機体情報を入手し(ステップS15)、管理空域Arealに新たに進入する航空機等に対して保護閾値を設定し(ステップS16)、上記のステップS10〜S14の判断処理において付された条件等に基づいて管理空域A内に存在する全航空機2に対して優先順位を設定する(ステップS17)。
【0151】
続いて、最適経路計算装置31は、上記の条件の下で、各航空機2に対して、優先順位を設定して行うA*アルゴリズムに基づいてそれぞれ各四次元最適経路の候補の算出を行い(ステップS18)、航空機同士のコンフリクトが発生しない解が得られなければ(ステップS19;NO)、航空機の優先順位を入れ替えて(ステップS20)、再度ステップS18からの処理を繰り返す。ここまでは第1の実施形態と同様である。
【0152】
しかし、本実施形態では、最適経路計算装置31は、設定した優先順位で航空機同士のコンフリクトが発生しない解が得られた場合には(ステップS19;YES)、各機に対してそれぞれ四次元最適経路の候補を算出して、算出した各四次元最適経路を送受信装置34を介して即座に各航空機2に送信するとともに、経路変更指令生成装置32に送信するようになっている(ステップS26)。
【0153】
そして、このように構成することで、前述したように、合理的な四次元最適経路を各航空機2に対して迅速に送信して指示することが可能となる。
【0154】
なお、上記の第1および第2の実施形態では、管理空域Arealに新たに航空機が進入する場合に解が見出せない場合、すなわち新たに進入する航空機を含む全航空機2に対する各四次元最適経路を算出できない場合には、管理空域Arealに新たに進入しようとする航空機を管理空域Areal外で待機させるようになっている。そして、もともと管理空域Areal内にいた各航空機2に従前の各自の四次元最適経路を飛行させ、所定時間経過後に各航空機2の位置等が移動する等して条件が変化した段階で改めて新たに進入する航空機を含む全航空機2に対する各四次元最適経路の算出を行うようになっている。
【0155】
また、このように構成する代わりに、例えば図2のように設定されたノードNやレグLの他に、例えば旋回して待機するためのノードやレグを設定することも可能であり、このように設定すれば、上記のような状況で単数または複数の航空機が待機用のノードを通過しながら待機することを含む解が見出されるようになる。
【0156】
さらに、航空機2が算出された四次元最適経路から外れて飛行する場合には、管理空域Areal内に存在する全航空機2に対する四次元最適経路の算出をやり直すように構成することも可能である。
【0157】
また、上記の各実施形態では、航空機2が管理空域Arealに進入した後、滑走路Sに着陸することで管理空域Arealから退出する場合について説明したが、本発明はこのような形態には限定されない。
【0158】
例えば、複数の航空機2が管理空域Arealの上空に設定された単数または複数の所定の進入ポイント(ノードまたはウェイポイント)から進入して同様に上空に設定された単数または複数の所定の退出ポイントから退出し、進入ポイントと退出ポイントとの間に複数のノード(ウェイポイント)やそれらを結ぶ複数のレグが設定されているような場合にも本発明は適用される。
【0159】
また、例えば管理空域Areal内に航空機が離着陸する滑走路を複数備え、それらの滑走路間を飛行する全ての航空機に対してそれぞれ四次元最適経路を算出するような場合にも適用できる。さらには、それらの滑走路間を飛行する航空機のみならず、管理空域Areal外から進入して管理空域Areal内の滑走路に着陸する航空機、滑走路から離陸して管理空域Areal外に退出する航空機、管理空域Areal外から進入して管理空域Areal外に退出する航空機等を含めた全ての航空機に対して四次元最適経路を算出するような場合にも適用可能である。
【0160】
さらに、上記の各実施形態では、航空機2が管理空域Arealに進入してから退出するまでの全時間についての経路コストとして、当該航空機2の各レグに沿った全飛行距離を設定し、各航空機2の全飛行距離の合計が最小となるようにそれぞれ四次元最適経路を算出する場合について説明した。そして、四次元最適経路を算出するためのA*アルゴリズムに計算に必要となるコストとして各レグの実際の距離(各ノード間の実際の距離)を用い、予測コスト(ヒューリスティック)h(n)として各レグの実際の距離に基づいて設定した値を用いる場合について説明した。
【0161】
しかし、経路コストやコスト、予測コストの設定の仕方はこれに限定されるものではなく、この他にも、例えば、航空機2が管理空域Arealに進入してから退出するまでの全時間についての経路コストとして、当該航空機2が管理空域Arealに進入してから退出するまでの全飛行時間を設定したり、或いは当該航空機2が管理空域Arealに進入してから退出するまでの全燃料消費量を設定したりすることが可能である。
【0162】
例えば、航空機2が管理空域Arealに進入してから退出するまでの全時間についての経路コストとして、当該航空機2が管理空域Arealに進入してから退出するまでの全飛行時間を設定する場合には、コストとして各レグ(各ノード間)の飛行に要する時間を用い、予測コストh(n)として各レグの飛行に要する時間に基づいて設定した値を用いるように設定される。
【0163】
このように構成した場合、各航空機2が各自に算出された四次元最適経路に沿って飛行すると、管理空域Areal内に存在する全航空機2の飛行時間の合計が最小となるような四次元最適経路を各航空機2に対してそれぞれ算出することが可能となる。そして、例えば、インシデントが発生した機体があれば、その機体の優先順位を最上位として四次元最適経路の算出を行うことで、当該機体を最小の飛行時間で最優先に滑走路Sに着陸させる等して管理空域Arealから迅速かつ適切に退出させることが可能となる。
【0164】
また、例えば、航空機2が管理空域Arealに進入してから退出するまでの全時間についての経路コストとして、当該航空機2が管理空域Arealに進入してから退出するまでの全燃料消費量を設定する場合には、コストとして各レグ(各ノード間)の飛行に要する燃料消費量を用い、予測コストh(n)として各レグの飛行に要する燃料消費量に基づいて設定した値を用いるように設定される。
【0165】
このように構成した場合、各航空機2が各自に算出された四次元最適経路に沿って飛行すると、管理空域Areal内に存在する全航空機2の燃料消費量の合計が最小となるような四次元最適経路を各航空機2に対してそれぞれ算出することが可能となる。そして、例えば、燃料の残量が乏しくなった機体があれば、例えばその機体をインシデントが発生した機体として優先順位を最上位として四次元最適経路の算出を行うことで、当該機体を最小の燃料消費量で最優先に滑走路Sに着陸させる等して管理空域Arealから適切に退出させることが可能となる。
【図面の簡単な説明】
【0166】
【図1】航空機の四次元最適経路誘導システムの構成を示す図である。
【図2】最適経路計算装置の仮想空間上に設定された管理空域やノード、レグを表す図である。
【図3】簡略化されたノードとレグの組み合わせを示す図である。
【図4】A*アルゴリズムにおけるノード選択の要領を説明する図である。
【図5】図3において見出された最短経路を示す図である。
【図6】A*アルゴリズムにおける処理の手順を示すフローチャートである。
【図7】図5の最短経路に沿って飛行する2機の大型機を模式的に示す図である。
【図8】図5の最短経路に沿って飛行する大型機と小型機を模式的に示す図である。
【図9】図8において大型機が小型機に追いついてコンフリクトが発生することを説明する図である。
【図10】第1および第2の実施形態に係る最適経路計算装置における処理の手順を示すフローチャートである。
【図11】第1の実施形態に係る最適経路計算装置における処理の手順を示すフローチャートである。
【図12】第2の実施形態に係る最適経路計算装置における処理の手順を示すフローチャートである。
【符号の説明】
【0167】
1 航空機の四次元最適経路誘導システム
2、2a〜2c 航空機
31 最適経路計算装置
32 経路変更指令生成装置
33 表示手段
34 送受信装置
A、Areal 管理空域
h(n) 予測コスト
L レグ
N ノード
Ra〜Rc 保護閾値
S 滑走路
【技術分野】
【0001】
本発明は、航空機の四次元最適経路誘導システムに係り、特に、管理空域に存在する航空機に対して四次元最適経路を算出して送信する航空機の四次元最適経路誘導システムに関する。
【背景技術】
【0002】
現行の航空機に対する管制業務は、例えば航空機ターミナル管制業務に携わる航空機交通管制官(以下、管制官という。)が、レーダ情報や各航空機から送信されてくる情報等に基づいて例えば管制卓の表示画面に表示される各航空機の飛行状況等を監視しながら、管制官の思考や判断等に基づいて各航空機に着陸の順序や待機等を指示することにより行われている。しかし、今後、航空機の交通量がさらに増加することが予測されており、現状のままでは管制官の負担が増大して、安全で効率的な誘導業務に支障が生じることが懸念されている。
【0003】
そこで、近年、航空機の四次元的な運動、すなわち三次元空間内を時間に応じて移動する運動をコンピュータ等で管理し、最適な経路等を演算して、管制官の思考や判断を支援すること等を目的とした最適化システムや支援システム等が種々開発されている。例えば、特許文献1に記載の四次元運動経路の最適化システム等の発明では、航空機の四次元初期設定座標と三次元初期設定速度とを変数とする物理的評価関数を逆ダイナミックスに従って導出し、評価関数の最適解を探索して求めることで単一解を得ることが提案されている。
【0004】
また、特許文献2に記載の四次元自動航行体等の発明では、航空機に搭載されたコンピュータで、航空機が現在位置と目標点の間に設定されるウェイポイント(waypoint)に基づいて適正化通過点を自動的に発見しながら航行することが提案されている。さらに、特許文献3に記載の管制官意思決定支援システム等の発明では、飛行場に到着しようとする航空機を検出し、検出されたすべての航空機に関して滑走路までの最短の飛行経路を判定することが提案されている。
【特許文献1】特開2002−308190号公報
【特許文献2】特開2004−326363号公報
【特許文献3】特開2006−53723号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1や特許文献2に記載の発明では、単一機を対象としているため、複数の機体間の異常接近や空中衝突すなわちコンフリクトについて考慮されておらず、航空機同士のコンフリクトの回避を重視する管制官の管制業務を必ずしも的確に支援するものとはならない。
【0006】
また、特許文献1に記載の発明では、同文献の各図に示されるように有効な解を演算し得る時間幅が数分程度であり、特許文献2に記載の発明では、航空機の現在位置とウェイポイントとの間の範囲で演算を行うものであり、例えば航空機が管制空域に進入してから滑走路に着陸するなど当該管理空域から退出するまでの全時間における最適性が保証されているとは言い難い。その点でも、管制官の要求を必ずしも満たすものではない。
【0007】
その点、特許文献3に記載の発明は、複数機の経路設定や合流順序付けを支援するものではあるが、事前に経路が定められていることが前提となっている。そのため、待機や迂回等の要素が考慮されておらず、航空機の経路のフレキシビリティが担保されているとはいえない。
【0008】
さらに、故障やトラブル等のインシデントが発生した機体は最優先で滑走路に着陸させる必要があるが、特許文献1〜3に記載の発明ではいずれもこのようなインシデントへの対応が考慮されていない。また、管制官等のオペレータによる経路変更の要請もあるが、これらの発明ではいずれもそのような要請に必ずしも応えることができないという問題があった。
【0009】
また、複数機の経路設定等においては、複数機に対して最も合理的な経路を算出して指示することが理想的であり考慮される必要があるが、その一方で、現実的な問題として、可能な限り早急に最適な経路を算出して迅速に各航空機に送信して指示することも考慮されなければならないという問題もある。
【0010】
本発明は、前記事情に鑑みてなされたものであり、複数機に対してコンフリクトを発生させない条件下で管理空域に進入してから退出するまでの全時間における四次元最適経路を全機体に対して算出することが可能な航空機の四次元最適経路誘導システムを提供することを目的とする。また、インシデントやオペレータによる経路変更に対応可能な航空機の四次元最適経路誘導システムを提供することをも目的とする。
【課題を解決するための手段】
【0011】
前記の問題を解決するために、第1の発明は、航空機の四次元最適経路誘導システムにおいて、
管理空域内に存在する複数の航空機について、前記複数の航空機の各機体情報をそれぞれ入手し、前記航空機同士のコンフリクトがない状態で、前記各航空機がそれぞれ当該管理空域に進入してから退出するまでの全時間についての各経路コストが最小になるように前記各航空機に対する各四次元最適経路を算出する最適経路計算装置と、
前記複数の航空機から各機体情報を受信して前記最適経路計算装置に送信し、前記最適経路計算装置が算出した前記各四次元最適経路を前記各航空機に対してそれぞれ送信する送受信装置と、
を備えることを特徴とする。
【0012】
第2の発明は、航空機の四次元最適経路誘導システムにおいて、
管理空域内に存在する複数の航空機について、前記複数の航空機の各機体情報をそれぞれ入手し、前記航空機同士のコンフリクトがない状態で、前記各航空機がそれぞれ当該管理空域に進入してから退出するまでの全時間についての各経路コストの合計が最小になるように前記各航空機に対する各四次元最適経路を算出する最適経路計算装置と、
前記複数の航空機から各機体情報を受信して前記最適経路計算装置に送信し、前記最適経路計算装置が算出した前記各四次元最適経路を前記各航空機に対してそれぞれ送信する送受信装置と、
を備えることを特徴とする。
【0013】
第3の発明は、第1または第2の発明の航空機の四次元最適経路誘導システムにおいて、前記航空機が前記管理空域に進入してから退出するまでの全時間についての前記経路コストは、当該航空機が当該管理空域に進入してから退出するまでの全飛行距離であることを特徴とする。
【0014】
第4の発明は、第1または第2の発明の航空機の四次元最適経路誘導システムにおいて、前記航空機が前記管理空域に進入してから退出するまでの全時間についての前記経路コストは、当該航空機が当該管理空域に進入してから退出するまでの全飛行時間であることを特徴とする。
【0015】
第5の発明は、第1または第2の発明の航空機の四次元最適経路誘導システムにおいて、前記航空機が前記管理空域に進入してから退出するまでの全時間についての前記経路コストは、当該航空機が当該管理空域に進入してから退出するまでの全燃料消費量であることを特徴とする。
【0016】
第6の発明は、第1から第5のいずれかの発明の航空機の四次元最適経路誘導システムにおいて、前記最適経路計算装置は、前記管理空域内に存在する複数の航空機にそれぞれ保護閾値を設定し、前記航空機同士の前記各保護閾値が接する場合には前記航空機同士のコンフリクトが生じると判定し、一方の航空機の経路を変更して前記航空機同士のコンフリクトを回避して、前記各航空機がそれぞれ当該管理空域に進入してから退出するまでの全時間についての各経路コストまたは前記各経路コストの合計が最小になるように前記各航空機に対する各四次元最適経路を算出することを特徴とする。
【0017】
第7の発明は、第1から第6のいずれかの発明の航空機の四次元最適経路誘導システムにおいて、前記最適経路計算装置は、前記管理空域に新たに航空機が進入する場合には、前記新たに進入する航空機を含めた前記管理空域内に存在する全ての前記航空機について、再度、前記航空機同士のコンフリクトがない状態で、前記各航空機がそれぞれ当該管理空域に進入してから退出するまでの全時間についての各経路コストまたは前記各経路コストの合計が最小になるように前記各航空機に対する各四次元最適経路を算出することを特徴とする。
【0018】
第8の発明は、第1から第7のいずれかの発明の航空機の四次元最適経路誘導システムにおいて、前記最適経路計算装置は、前記送受信装置を介して前記航空機から緊急報告を受信した場合には、前記緊急報告を発信した当該航空機自体の前記経路コストが最小となるように経路を算出する条件下で、再度、前記航空機同士のコンフリクトがない状態で、前記各航空機がそれぞれ当該管理空域に進入してから退出するまでの全時間についての各経路コストまたは前記各経路コストの合計が最小になるように前記各航空機に対する各四次元最適経路を算出することを特徴とする。
【0019】
第9の発明は、第1から第8のいずれかの発明の航空機の四次元最適経路誘導システムにおいて、前記最適経路計算装置が算出した前記複数の航空機に対する前記各四次元最適経路を画面上に表示する表示手段を有し、前記最適経路計算装置に対して特定の航空機に対する四次元最適経路の変更を指令可能な経路変更指令生成装置を備えることを特徴とする。
【0020】
第10の発明は、第9の発明の航空機の四次元最適経路誘導システムにおいて、前記最適経路計算装置は、前記経路変更指令生成装置から前記四次元最適経路の変更の指令を受けた場合には、変更された経路を変更しない条件下で、再度、前記航空機同士のコンフリクトがない状態で、前記各航空機がそれぞれ当該管理空域に進入してから退出するまでの全時間についての各経路コストまたは前記各経路コストの合計が最小になるように前記各航空機に対する各四次元最適経路を算出することを特徴とする。
【0021】
第11の発明は、第1から第10のいずれかの発明の航空機の四次元最適経路誘導システムにおいて、前記最適経路計算装置は、前記管理空域内に複数のノードと前記ノード間を結ぶ複数のレグを予め設定し、前記複数のノードにそれぞれ予測コストを予め設定し、前記複数のレグにそれぞれコストを予め設定し、所定の前記ノードをゴールとし、前記航空機が当該管理空域に進入してから前記ゴールに退出するまでの経路の各レグのコストの総和を前記航空機が当該管理空域に進入してから退出するまでの全時間についての経路コストとして算出し、A*アルゴリズムに基づいて、前記各航空機に対して、前記各経路コストがそれぞれ最小になるように当該航空機が当該管理空域に進入してから前記ゴールに退出するまでの全レグを前記四次元最適経路の候補として算出することを特徴とする。
【0022】
第12の発明は、第11の発明の航空機の四次元最適経路誘導システムにおいて、前記ゴールとされる所定のノードは、滑走路に設定されていることを特徴とする。
【0023】
第13の発明は、第11または第12の発明の航空機の四次元最適経路誘導システムにおいて、前記最適経路計算装置は、前記管理空域内に存在する前記複数の航空機に対して優先順位を設定し、前記複数の航空機がA*アルゴリズムに基づいて前記各四次元最適経路の候補として算出された各レグに沿ってそれぞれ進行した場合に、前記航空機同士のコンフリクトが発生する場合には、前記優先順位が上位の航空機の前記四次元最適経路の候補を維持し、前記優先順位が下位の航空機については、当該航空機がコンフリクトを生じる前記レグまたは前記ノードを通らないという条件下で、再度A*アルゴリズムに基づいて前記四次元最適経路の候補を算出することを特徴とする。
【0024】
第14の発明は、第13の発明の航空機の四次元最適経路誘導システムにおいて、前記最適経路計算装置は、前記複数の航空機に対する前記優先順位を設定し、前記複数の航空機がA*アルゴリズムに基づいて前記各四次元最適経路の候補として算出された各レグに沿ってそれぞれ進行した場合に、前記航空機同士のコンフリクトが発生する場合には、前記優先順位が上位の航空機の前記四次元最適経路の候補を維持し、前記優先順位が下位の航空機については前記条件下で再度A*アルゴリズムに基づいて前記四次元最適経路の候補を算出し、前記航空機同士のコンフリクトが発生しない解が得られた場合には、前記解において前記各航空機に対して算出された前記各四次元最適経路の候補を、解である前記各四次元最適経路として算出することを特徴とする。
【0025】
第15の発明は、第13の発明の航空機の四次元最適経路誘導システムにおいて、前記最適経路計算装置は、前記複数の航空機に対する前記優先順位を設定し、前記複数の航空機がA*アルゴリズムに基づいて前記各四次元最適経路の候補として算出された各レグに沿ってそれぞれ進行した場合に、前記航空機同士のコンフリクトが発生する場合には、前記優先順位が上位の航空機の前記四次元最適経路の候補を維持し、前記優先順位が下位の航空機については前記条件下で再度A*アルゴリズムに基づいて前記四次元最適経路の候補を算出して、前記各航空機がそれぞれ当該管理空域に進入してから退出するまでの全時間についての各経路コストの合計を算出し、前記各経路コストの合計を算出する処理を、前記複数の航空機に対する前記優先順位を入れ替えながら繰り返して、算出された前記各経路コストの合計が最小となる前記各四次元最適経路の候補を、解である前記各四次元最適経路として算出することを特徴とする。
【0026】
第16の発明は、第15の発明の航空機の四次元最適経路誘導システムにおいて、
前記最適経路計算装置は、前記複数の航空機に対する前記優先順位を設定し、前記複数の航空機がA*アルゴリズムに基づいて前記各四次元最適経路の候補として算出された各レグに沿ってそれぞれ進行した場合に、前記航空機同士のコンフリクトが発生しない場合には、前記各航空機に対して算出された前記各四次元最適経路の候補を、解である前記各四次元最適経路として算出することを特徴とする。
【0027】
第17の発明は、第13から第16のいずれかの発明の航空機の四次元最適経路誘導システムにおいて、前記最適経路計算装置は、前記管理空域に新たに航空機が進入する場合には、前記新たに進入する航空機を含めた前記管理空域内に存在する全ての前記航空機について、再度、前記優先順位を設定して、前記各航空機に対する前記各四次元最適経路の候補を算出することを特徴とする。
【0028】
第18の発明は、第13から第17のいずれかの発明の航空機の四次元最適経路誘導システムにおいて、前記最適経路計算装置は、前記送受信装置を介して前記航空機から緊急報告を受信した場合には、前記緊急報告を発信した当該航空機の前記優先順位を最上位に固定して、前記各航空機に対する前記各四次元最適経路の候補を算出することを特徴とする。
【0029】
第19の発明は、第13から第18のいずれかの発明の航空機の四次元最適経路誘導システムにおいて、
前記最適経路計算装置が算出した前記複数の航空機に対する前記各四次元最適経路を画面上に表示する表示手段を有し、前記最適経路計算装置に対して特定の航空機に対する四次元最適経路の変更を指令可能な経路変更指令生成装置を備え、
前記最適経路計算装置は、前記経路変更指令生成装置から前記四次元最適経路の変更の指令を受けた場合には、変更された経路を変更しない条件下で、前記経路が変更されなかった航空機に対して前記優先順位を設定して、前記各航空機に対する前記各四次元最適経路の候補を算出することを特徴とする。
【0030】
第20の発明は、第13から第19のいずれかの発明の航空機の四次元最適経路誘導システムにおいて、前記最適経路計算装置は、前記管理空域内の制限空域の設定が時間的に変更される場合、前記制限空域の設定が変更される以前と以後の前記管理空域についてそれぞれ前記複数のノードと前記複数のレグの組み合わせを予め用意しておき、前記制限空域の設定が変更された段階で、変更された前記設定に対応する前記組み合わせに基づいて前記各航空機に対する前記各四次元最適経路の候補を算出することを特徴とする。
【0031】
第21の発明は、第13から第19のいずれかの発明の航空機の四次元最適経路誘導システムにおいて、前記最適経路計算装置は、前記管理空域内の制限空域の設定が時間的に変更される場合、前記制限空域内にも予め単数または複数のノードとそれらを結ぶ単数または複数のレグを設定しておき、前記制限空域が設定された段階で、前記制限空域を仮想的に前記優先順位が最上位の航空機として扱って、前記各航空機に対する前記各四次元最適経路の候補を算出することを特徴とする。
【発明の効果】
【0032】
第1の発明によれば、例えばA*アルゴリズムのような最適化手法を用いて管理空域内に進入した複数の航空機に対してそれぞれ四次元最適経路を算出し、コンフリクトを生じる場合には、複数の航空機に優先順位を設定して下位の航空機の経路を迂回させる等の手法を用いることで、航空機同士のコンフリクトを防止する。そして、そのうえで、複数の航空機の管理空域に進入してから滑走路に着陸するなどして管理空域から退出するまでの全時間についての各飛行距離等の各経路コストが最小になるように各航空機に対する各四次元最適経路を算出することで、管理空域内に存在する全航空機の経路を最適化する。
【0033】
そのため、航空機同士のコンフリクトの回避を重視する管制官の管制業務を的確に支援することが可能となるとともに、各航空機が管理空域に進入してから滑走路に着陸するなどして当該管理空域から退出するまでの全時間における最適性が保証され、管制官がそれらを全体的に把握して、総合的に管理することが可能となる。また、それとともに、各航空機に対して合理的な四次元最適経路を算出して迅速に送信することが可能となる。
【0034】
第2の発明によれば、例えばA*アルゴリズムのような最適化手法を用いて管理空域内に進入した複数の航空機に対してそれぞれ四次元最適経路を算出し、コンフリクトを生じる場合には、複数の航空機に優先順位を設定して下位の航空機の経路を迂回させる等の手法を用いることで、航空機同士のコンフリクトを防止する。そして、そのうえで、複数の航空機の管理空域に進入してから滑走路に着陸するなどして管理空域から退出するまでの全時間についての各飛行距離等の各経路コストの合計が最小になるように各航空機に対する各四次元最適経路を算出することで、管理空域内に存在する全航空機の経路を全体的に最適化する。
【0035】
そのため、航空機同士のコンフリクトの回避を重視する管制官の管制業務を的確に支援することが可能となるとともに、各航空機が管理空域に進入してから滑走路に着陸するなどして当該管理空域から退出するまでの全時間における最適性が保証され、管制官がそれらを全体的に把握して、総合的に管理することが可能となる。また、各航空機に対して最も合理的な四次元最適経路を算出して送信することが可能となる。
【0036】
第3の発明によれば、前記各発明の効果に加え、航空機が管理空域に進入してから退出するまでの全時間についての経路コストを、当該航空機が管理空域に進入してから退出するまでの全飛行距離とすることで、各航空機が各自に対して算出された四次元最適経路に沿って飛行した場合に、管理空域内に存在する各航空機の飛行距離または全航空機の飛行距離の合計が最小となり、航空機同士のコンフリクトが発生しない四次元最適経路を各航空機に対してそれぞれ算出することが可能となる。
【0037】
第4の発明によれば、前記各発明の効果に加え、航空機が管理空域に進入してから退出するまでの全時間についての経路コストを、当該航空機が管理空域に進入してから退出するまでの全飛行時間とすることで、各航空機が各自に対して算出された四次元最適経路に沿って飛行した場合に、管理空域内に存在する各航空機の飛行時間または全航空機の飛行時間の合計が最小となり、航空機同士のコンフリクトが発生しない四次元最適経路を各航空機に対してそれぞれ算出することが可能となる。
【0038】
第5の発明によれば、前記各発明の効果に加え、航空機が管理空域に進入してから退出するまでの全時間についての経路コストを、当該航空機が管理空域に進入してから退出するまでの全燃料消費量とすることで、各航空機が各自に対して算出された四次元最適経路に沿って飛行した場合に、管理空域内に存在する各航空機の燃料消費量または全航空機の燃料消費量の合計が最小となり、航空機同士のコンフリクトが発生しない四次元最適経路を各航空機に対してそれぞれ算出することが可能となる。
【0039】
第6の発明によれば、航空機同士のコンフリクトが生じる場合に、一方の航空機の経路を変更して航空機同士のコンフリクトを回避するようにして各経路コストまたは各経路コストの合計が最小になるように各航空機に対する各四次元最適経路を算出することで、航空機同士のコンフリクトを的確に回避して航空機同士のコンフリクトがない状態で四次元最適経路を算出することが可能となる。また、そのため、航空機同士の異常接近や空中衝突が的確に回避される経路を設定することが可能となるため、管制官がその結果を信頼し、安心して航空管制業務を行うことが可能となり、前記各発明の効果がより的確に発揮される。
【0040】
第7の発明によれば、管理空域に新たに航空機が進入する場合に、その新たに進入する航空機を含めた全航空機について再度各四次元最適経路を算出することで、新たに進入する航空機に対する四次元最適経路を算出することが可能となるとともに、管理空域内にすでに存在する航空機と新たに進入する航空機とのコンフリクトが発生することを未然に防止して、コンフリクトが発生しないことが確実な状態で各航空機に対する四次元最適経路を算出することが可能となり、前記各発明の効果が的確に発揮される。
【0041】
第8の発明によれば、燃料の残量が乏しくなった、故障やトラブルが発生した等のインシデントが発生した航空機がある場合に、当該航空機を優先してその航空機自体の経路コストが最小となるように経路を算出し、その条件下で、再度、各航空機に対してそれぞれ四次元最適経路を算出することで、インシデントが発生した航空機を最優先で滑走路に着陸させる等して管理空域から迅速かつ適切に退出させる経路を管制官に示すことが可能となり、インシデントの発生に対して管制官に的確に対応させることが可能となる。また、それとともに、他の航空機にはその条件の下での最適な経路を算出して指示することが可能となり、前記各発明の効果が的確に発揮される。
【0042】
第9の発明によれば、前記各発明の効果に加え、経路変更指令生成装置の表示手段の画面上に最適経路計算装置が算出した複数の航空機に対する各四次元最適経路が表示されるため、管制官が管理空域を飛行する複数の航空機の飛行状況等を容易に監視することが可能となり、経路変更が必要か否かを的確に判断することが可能となる。また、経路変更指令生成装置により最適経路計算装置に対して特定の航空機に対する四次元最適経路の変更を指令することが可能となるため、管制官が、自ら判断した場合や管理空域を飛行中の航空機から経路変更の要求を受けた場合などに、経路変更指令生成装置を操作して特定の航空機に対する四次元最適経路を的確に変更することが可能となる。
【0043】
第10の発明によれば、管制官による経路変更があった場合に、その変更された経路を固定した状態で最適化を行うため、算出された四次元最適経路が管制官の変更要求に的確に対応するものとなると同時に、他の航空機の経路を最適化することが可能となり、前記各発明の効果が的確に発揮される。
【0044】
第11の発明によれば、前記各発明の効果に加え、管理空域内に複数のノードと複数のレグを設定するなどして、A*アルゴリズムに用いて各航空機に対する四次元最適経路を算出するように構成することで、必要な選択ノードの候補のみを展開して演算を行うため、遺伝的アルゴリズムやいわゆる総当りで最適経路探索を行う場合のように演算を行う必要のない経路についてまで演算を行うことがなく、演算時間を大幅に短縮することが可能となる。
【0045】
また、A*アルゴリズムを用いれば、以前の演算結果を後の演算に用いることが可能となるため、再度の演算が不要となり、その点でも演算の高速化を図ることができる。そのため、各航空機に対する各四次元最適経路の算出をサブ秒〜数秒程度で行うことが可能となり、非常に迅速に四次元最適経路を算出して各航空機に送信することが可能となる。
【0046】
さらに、A*アルゴリズムによる各四次元最適経路の算出結果から容易かつ的確に航空機同士のコンフリクト発生の有無を確認することが可能となる。また、例えば特定のノードを選択しない等の条件を容易に付加して演算を行うことができるため、インシデントや経路変更の要求等の新たな条件が課された場合にも、それらの条件を付加してA*アルゴリズムを複合的に用いることで、容易に条件を付加して演算を行うことが可能となり、種々の条件に対応する最適解を的確に算出することが可能となる。
【0047】
第12の発明によれば、A*アルゴリズムにおけるゴールのノードを滑走路に設定することで、複数の航空機が管理空域に進入して滑走路に着陸する場合の各航空機に対する四次元最適経路を的確に算出することが可能となり、そのような場合における前記各発明の効果が的確に発揮される。
【0048】
第13の発明によれば、A*アルゴリズムを用いて複数の航空機に対する四次元最適経路を算出する際に、管理空域内に存在する複数の航空機に対して優先順位を設定し、航空機同士のコンフリクトが発生する場合に、優先順位が上位の航空機の四次元最適経路の候補を維持し、優先順位が下位の航空機について当該航空機がコンフリクトを生じるレグやノードを通らないという条件下で再度A*アルゴリズムに基づいて四次元最適経路の候補を算出するというようにA*アルゴリズムを複合的に用いることで、航空機同士のコンフリクトを的確に回避して航空機同士のコンフリクトがない状態で各航空機に対して適切な四次元最適経路を算出することが可能となる。また、そのため、航空機同士の異常接近や空中衝突が的確に回避される経路を設定することが可能となるため、管制官がその結果を信頼し、安心して航空管制業務を行うことが可能となり、前記各発明の効果がより的確に発揮される。
【0049】
第14の発明によれば、複数の航空機に対して優先順位を設定してA*アルゴリズムに基づいて各四次元最適経路の候補を算出し、航空機同士のコンフリクトが発生する場合には、上記の条件下で再度A*アルゴリズムに基づいて四次元最適経路の候補を算出し、航空機同士のコンフリクトが発生しない解が得られた場合には、それらの各四次元最適経路の候補を各四次元最適経路として算出することで、各航空機に対して合理的な四次元最適経路を算出して迅速に送信することが可能となり、前記各発明の効果が的確に発揮される。
【0050】
第15の発明によれば、複数の航空機に対して優先順位を設定してA*アルゴリズムに基づいて各四次元最適経路の候補を算出し、航空機同士のコンフリクトが発生する場合には、上記の条件下で再度A*アルゴリズムに基づいて四次元最適経路の候補を算出して、各航空機がそれぞれ当該管理空域に進入してから退出するまでの全時間についての各経路コストの合計を算出する処理を、優先順位を入れ替えながら繰り返して、算出された各経路コストの合計が最小となる各四次元最適経路の候補を各四次元最適経路として算出することで、各航空機に対して最も合理的な四次元最適経路を算出して送信することが可能となり、前記各発明の効果が的確に発揮される。
【0051】
第16の発明によれば、算出された四次元最適経路の候補は各航空機の経路コストが最小となる経路であり、それに沿って各航空機がそれぞれ進行した場合にコンフリクトがまったく生じないのであれば、各航空機の優先順位を入れ替えて再度A*アルゴリズムを用いて四次元最適経路を算出しても航空機の経路変更等は生じないから、同じ結果が得られるだけである。そのため、航空機同士のコンフリクトが発生しない場合には再度の算出を行わなくてもよい。
【0052】
そのため、前記各発明の効果に加え、優先順位を設定して最初にA*アルゴリズムを用いて四次元最適経路を算出した際に航空機同士のコンフリクトがまったく発生しない場合には、各航空機に対して算出された各四次元最適経路の候補を即座に解である前記各四次元最適経路として算出することが可能であり、このように構成することで四次元最適経路の算出に要する時間の短縮を図ることが可能となる。
【0053】
第17の発明によれば、管理空域に新たに航空機が進入する場合に、その新たに進入する航空機を含めた全航空機について優先順位を設定して再度各四次元最適経路を算出することで、新たに進入する航空機に対する四次元最適経路を算出することが可能となるとともに、管理空域内にすでに存在する航空機と新たに進入する航空機とのコンフリクトが発生することを未然に防止して、コンフリクトが発生しないことが確実な状態で各航空機に対する四次元最適経路を算出することが可能となり、前記各発明の効果が的確に発揮される。
【0054】
第18の発明によれば、インシデントが発生した航空機がある場合に、当該航空機の優先順位を最上位に固定してその航空機自体の経路コストが最小となるように経路を算出し、その条件下で、再度、各航空機に対してそれぞれ四次元最適経路を算出することで、インシデントが発生した航空機を最優先で滑走路に着陸させる等して管理空域から迅速かつ適切に退出させる経路を管制官に示すことが可能となり、インシデントの発生に対して管制官に的確に対応させることが可能となる。また、それとともに、他の航空機にはその条件の下での最適な経路を算出して指示することが可能となり、前記各発明の効果が的確に発揮される。
【0055】
第19の発明によれば、管制官による経路変更があった場合に、その変更された経路を固定した条件下で、他の経路が変更されなかった航空機に対して優先順位を設定して最適化を行うため、算出された四次元最適経路が管制官の変更要求に的確に対応するものとなると同時に、他の航空機の経路を最適化することが可能となり、前記各発明の効果が的確に発揮される。
【0056】
第20の発明によれば、前記各発明の効果に加え、管理空域内の制限空域の設定が時間的に変更される場合に、制限空域の設定が変更される前後のノードとレグの組み合わせをそれぞれ予め用意しておき、制限空域の設定の変更にあわせて組み合わせを変えることで、制限空域の設定が変更される前後の状況に応じてそれぞれ適切に四次元最適経路を算出することが可能となる。
【0057】
第21の発明によれば、前記各発明の効果に加え、管理空域内の制限空域の設定が時間的に変更される場合に、航空機が制限空域内に進入できないことと航空機が他の航空機とコンフリクトすることを同様に解して、制限空域内にも予めノードとレグを設定しておき、制限空域が設定された段階で制限空域を仮想的に優先順位が最上位の航空機として扱うことで、制限空域よりの優先順位が下位の航空機に対しては、制限空域とのコンフリクトを避けるような、すなわち制限空域に進入しないような四次元最適経路が算出されるようになるため、算出される四次元最適経路は各航空機が制限空域内のノードやレグを通らない経路となる。このように、第21の発明によれば、航空機同士のコンフリクト回避のロジックを利用して、各航空機が制限空域に進入しないような四次元最適経路を算出するように構成することが可能となる。
【発明を実施するための最良の形態】
【0058】
以下、本発明に係る航空機の四次元最適経路誘導システムの実施の形態について、図面を参照して説明する。
【0059】
[第1の実施の形態]
[全体構成]
第1の実施形態に係る航空機の四次元最適経路誘導システム1は、図1に示すように、大型機や小型機、ヘリコプタ等の管理空域Arealに進入してくる各航空機2からそれぞれ発信される機体情報を受信する地上局3を備えている。そして、地上局3で、管理空域Areal内に存在する全ての航空機2について、航空機2同士のコンフリクトがないという条件下でそれぞれ四次元最適経路をそれぞれ算出し、算出した各四次元最適経路を各航空機2にそれぞれ送信して指令するようになっている。
【0060】
その際、地上局3は、航空機2が管理空域Arealに進入してから退出するまでの全時間についての経路コストという概念を導入する。そして、各航空機2についてそれぞれ経路コストを算出して、航空機2同士のコンフリクトがないという条件下で各航空機2の各経路コストが最小となるように各航空機2に対してそれぞれ四次元最適経路を算出するようになっている。経路コストおよびその算出方法については、後で詳しく説明する。
【0061】
ここで、四次元最適経路とは、それが各航空機2に対して管理空域Areal内に三次元的に指定される所定のウェイポイントをそれぞれ所定の時刻に通過せよという形で指定されることを意味している。また、管理空域Arealとは、地上局3が管理する空域をいう。なお、地上局3が管理する管理空域Arealは、いわゆる航空路管制機関(Area Control Center:ACC)が管轄する管制空域である場合も含むが、それに限定されない。
【0062】
また、地上局3が管理する管理空域Arealに、航空機2が離着陸する滑走路が含まれる場合には、当該滑走路から離陸する航空機2は管理空域Arealに進入する航空機として扱われ、また、当該滑走路に着陸する航空機2は管理空域Arealから退出する航空機として扱われるようになっている。以下、管理空域Arealに滑走路が存在する場合について説明するが、本発明は管理空域Arealに滑走路が存在する場合に限定されない。
【0063】
[航空機]
各航空機2には、コンピュータで構成される図示しない機上計算装置がそれぞれ搭載されており、各航空機2は、常時或いは地上局3からの送信要求に応じて当該航空機2の三次元の位置(緯度、経度、高度)の情報、対地速度、機体番号等の機体情報を図示しない送受信装置を介して地上局3に送信するようになっている。また、各航空機2は、地上局3から各航空機2に対する四次元最適経路が送信されてくると、それに従って管理空域Areal内を飛行するようになっている。
【0064】
また、各航空機2には、異常接近や空中衝突を防止するために、当該航空機2の機種や当該航空機2が備えている装備等に応じて当該航空機2からの保護領域半径や高度閾値等で規定される三次元的な保護閾値がそれぞれ設定されるようになっている。
【0065】
[地上局]
地上局3は、図1に示すように、最適経路計算装置31と、表示手段33を有する経路変更指令生成装置32と、アンテナ35を有する送受信装置34とを備えている。また、最適経路計算装置31と経路変更指令生成装置32には共通の或いはそれぞれ記憶手段36が接続されている。記憶手段36には、機体番号と、機体番号で規定される航空機2の機種や備えている装備等とを対応付けるテーブルや、機種と保護閾値とを対応付けるテーブル等が格納されている。
【0066】
最適経路計算装置31は、例えば管制卓のコンピュータ内に構築されている。最適経路計算装置31のコンピュータ内の仮想空間には、地上局3が管理する管理空域Arealが再現されている。以下、仮想空間上に再現された管理空域を管理空域Aという。
【0067】
実際の管理空域Arealには、管理空域Areal内の三次元の点で表される複数のウェイポイントが設定されており、航空機2は、これらのウェイポイントを目印として管理空域Areal内を進行するようになっている。最適経路計算装置31の管理空域Aでは、例えば図2に示すように、これらのウェイポイントに対応する管理空域A上の位置に各ノードNがそれぞれ設定されている。なお、管理空域A上では、各ノードNはそれぞれ実際の管理空域Areal内の対応するウェイポイントの緯度、経度、高度の3成分を有する仮想空間上の三次元的な点として定義されている。
【0068】
管理空域A中の複数のノードNは、複数のレグLで結ばれており、各レグLは、管理空域Areal上でウェイポイント間を結ぶレグに対応するように設定されている。すなわち、仮想空間上の管理空域Aでは航空機は各レグLに沿って進行するようになっている。
【0069】
図2に示す管理空域Aでは、航空機2の管理空域Aへの進入ルートはノードNa、Nb、Ncを通過する3ルートがあり、ノードNa、Nb、Ncを通過して管理空域A内に進入した航空機は、各レグLに沿って進行して滑走路Sに至るようになっている。また、図2の例では、各レグLは、各ルートから進入した航空機が滑走路Sに到達する最短経路を表すレグLmと、迂回して滑走路Sに到達する迂回路を表すレグLdと、最短経路のノードNと迂回路のノードN或いは各迂回路のノードN間を結ぶバイパスを表すレグLbの3種類のレグの組み合わせで構成されている。
【0070】
最適経路計算装置31は、このように設定された管理空域Aにおいて、管理空域A内に存在する全ての航空機(すなわち実際の管理空域Areal内に存在する全ての航空機2)についてそれぞれ四次元最適経路をそれぞれ算出するようになっているが、これについては後で詳しく説明する。
【0071】
最適経路計算装置31は、算出した各航空機に対する各四次元最適経路を、送受信装置34を介して各航空機2に送信するとともに、経路変更指令生成装置32に送信するようになっている。
【0072】
経路変更指令生成装置32は、CRT(Cathode Ray Tube)等で構成される表示手段33を備えたコンピュータで構成されている。表示手段33の画面上には、図2に示した管理空域Aと同様の模式化された管理空域の画像が表示されるようになっており、管理空域Areal内を飛行している各航空機2から送信されてくる三次元の位置の情報に基づいて、各航空機2がその緯度、経度に対応する画像上の位置に表示されるようになっている。
【0073】
また、各航空機の表示には、機体番号が付随して表示されるとともに、各航空機の対地速度に応じた長さの矢印がその進行方向を向くように表示されるようになっており、管制官等がそれらの表示を見て、航空機の現在位置や進行方向、対地速度、機種等を把握することができるようになっている。
【0074】
さらに、経路変更指令生成装置32の表示手段33の画面上には、図2に示した管理空域Aと同様に各ノードNやそれらを結ぶ各レグLが表示されるようになっており、最適経路計算装置31が各航空機について算出した各四次元最適経路がそれぞれ画面上に表示されるようになっている。
【0075】
経路変更指令生成装置32には、マウスやキーボード等の図示しない入力手段が備えられており、管制官等のオペレータが入力手段を操作して、表示手段33の画面を見ながら、単数または複数の特定の航空機に対する四次元最適経路を変更することができるようになっている。このように、経路変更指令生成装置32は、最適経路計算装置31が各航空機について算出した各四次元最適経路を管制官等に表示するとともに、管制官等のオペレータがそれを変更することを可能とする、いわばインターフェースとして機能している。
【0076】
送受信装置34は、アンテナ35を介して各航空機2から送信されてくる各機体情報を受信して、それらの機体情報を最適経路計算装置31や経路変更指令生成装置32に送信するとともに、最適経路計算装置31が算出した各四次元最適経路を、管理空域Arealを飛行中の各航空機2に対してそれぞれ送信するようになっている。
【0077】
以下、最適経路計算装置31における各航空機に対する四次元最適経路の算出処理について説明する。
【0078】
本実施形態では、各航空機に対する四次元最適経路の算出には、上記のように複数のノードNとノードN間を結ぶ各レグLが設定されている場合に、あるスタートのノードからゴールのノードまでの例えば最短距離を探索するのに適したA*アルゴリズムが用いられるようになっている。以下、A*アルゴリズムについて簡単に説明する。なお、各航空機に対する四次元最適経路の算出に用いられるアルゴリズムはA*アルゴリズムには限定されるものではなく、他のアルゴリズムを用いて構成することも可能である。
【0079】
図2の各ノードNや各レグLは組み合わせが複雑であるので、より簡略化された図3の各ノードや各レグの組み合わせに基づいて説明する。また、以下では、ノードAをスタートしてノードHのゴールに至る最短経路を探索して決定する場合について説明する。
【0080】
各ノードA〜Hの位置は空間上に固定されており、また、各ノードA〜Hを結ぶレグすなわち通過可能なノード間経路も決まっている。すなわち、他のノードを経由せずに例えばノードAから直接ノードDに移動することはできない。また、各レグの実際の距離(コスト)は各レグの側に記載された数字のように予め分かっているものとする。
【0081】
A*アルゴリズムでは、このように設定された各ノードA〜Hに対してそれぞれ予測コスト(ヒューリスティック)h(n)が与えられる点に特徴がある。予測コストは、例えば各ノードA〜Hの側に括弧内に記載された数値が与えられる。そして、g(n)をそのノードに至るまでの各レグの距離の和とすると、
f(n)=g(n)+h(n) …(1)
で表されるf(n)が最小になるように経路を選択していくことで、最短経路を見出すことができる。
【0082】
具体的には、ノードAからはノードB、C、Eに至る各レグを選択することが可能であるが、ここで、各レグを選択する際のf(n)を上記(1)式に従って計算する。すると、図4に示すように、f(B)、f(C)、f(E)はそれぞれ8、5、11と計算されるため、f(n)が最小のノードCに至るレグが選択される。続いて、ノードCからはノードA、B、D、Eに至る各レグを選択することが可能であり、各f(n)を上記(1)式に従って計算すると、f(A)、f(B)、f(D)、f(E)はそれぞれ10、8、6、16と計算されるため、f(n)が最小のノードDに至るレグが選択される。
【0083】
そして、ノードDからはノードC、E、F、Hに至る各レグを選択することが可能であり、f(n)が最小となるノードHに至るレグが選択されてゴールのノードHに至る。このように、この場合は、図5に示すように、A→C→D→Hと進む経路が最短経路として見出される。
【0084】
A*アルゴリズムにおける上記の処理をフローチャートで示すと、図6に示すように、まず、スタートのノードAを選択ノードとし(ステップS1)、次の選択ノードの候補、すなわち上記の例ではノードB、C、Eをメモリ上に展開する(ステップS2)。そして、各候補について上記(1)式に従ってf(n)を計算し、f(n)が最小となるノードを選択ノードとする(ステップS3)、選択ノードがゴールのノードHでなければ(ステップS4;NO)、ステップS2〜S4の処理を繰り返し、選択ノードがゴールのノードHとなった時点で(ステップS4;YES)、探索を終了するという処理手順で表される。
【0085】
A*アルゴリズムでは、各予測コストh(n)を厳密に決定する必要はなく、各ノードA〜HからゴールのノードHに至る現実の最短経路の各レグの距離(コスト)の和、すなわち例えばノードAであればA→C→D→Hと進む経路の各レグの和2+2+3=7、ノードEであればE→D→Hと進む経路の各レグの距離の和7+3=10を越えない値に設定すれば、上記の仕方で見出された経路が最短の経路であることが数学的に保証されている。
【0086】
例えばレグ間距離をコストとする場合、予測コスト(ヒューリスティック)h(n)は各ノードからゴールまでの直線距離とすることが多い。例えばノードCからゴールのノードHまでの実際の距離(コスト)は、C→D→Hと進む距離5であるが、予測コスト(ヒューリスティック)h(n)をゴールのノードHまでの直線距離とすれば、予測コスト(ヒューリスティック)h(n)は必ず5以下となり、解の最適性が数学的に保証されるからである。
【0087】
本実施形態においても、これと同様に、図2に示した各ノードN間の現実の距離を算出して距離が各レグの距離(コスト)として予め設定されており、それらの距離に基づいて各ノードNにそれぞれ予測コストh(n)が予め設定されている。
【0088】
そして、本実施形態では、各航空機に対する四次元最適経路の算出は、各航空機の現在位置に基づいて直後に到達するノードをそれぞれスタートのノードとし、滑走路S(図2参照)上のノードをゴールのノードとして、基本的にA*アルゴリズムを用いて算出するようになっている。
【0089】
すなわち、本実施形態では、前述した航空機2が管理空域Arealに進入してから退出するまでの全時間についての経路コストとして、当該航空機が管理空域Areal(または管理空域A。以下同じ)に進入してから退出するまでの全飛行距離、すなわち当該航空機が管理空域Arealに進入してからゴールである滑走路Sに着陸するまでの経路の全レグの各コスト(実際の距離)の総和を考える。そして、A*アルゴリズムを用いて当該経路コストが最小になるように、すなわちスタートのノードからゴールのノードである滑走路Sのノードまでの最短の経路を算出して、それを当該航空機の四次元最適経路とする。
【0090】
しかし、各航空機に対する各四次元最適経路が算出されたとしても、実際にその四次元最適経路に沿って各航空機が飛行した場合、航空機同士の異常接近や空中衝突、すなわちコンフリクトが生じてしまう可能性がある。そのため、単純にA*アルゴリズムを用いて各航空機に対して四次元最適経路を算出するだけでは必ずしも十分ではない。
【0091】
そこで、本実施形態では、上記のようにA*アルゴリズムを用いて算出された各航空機の四次元最適経路を、求める四次元最適経路の候補としたうえで、各航空機をそれぞれの現在位置から進行させてコンフリクトが生じるか否かを判定するようになっている。
【0092】
なお、本実施形態では、各レグを飛行する各航空機の対地速度を機種ごとに予め設定しておき、それに基づいて各航空機を各レグ上を移動させてコンフリクト判定を行う場合が想定されているが、例えば各航空機が順調に飛行し得る対地速度の範囲を予め設定しておき、その範囲内での対地速度の変動可能とする条件下でA*アルゴリズムを適用して各レグにおける対地速度も算出するように構成することも可能である。
【0093】
また、本実施形態では、前述した記憶手段36に格納されている機種と保護閾値とを対応付けるテーブル等を参照して、最適経路計算装置31の仮想空間上の管理空域Aの各航空機に対して保護閾値を設定し、各航空機をそれぞれの現在位置から進行させた場合に経路上で航空機同士の各保護閾値が接したり重なり合ったりする場合に航空機同士のコンフリクトが生じると判定するようになっている。
【0094】
例えば、図5の例で言えば、図7に示すように、ノードA、C間のレグ上を大型機2aが飛行し、ノードC、D間のレグ上を大型機2bが飛行していても、大型機2a、2bの対地速度はさほど違わないため、大型機2aが大型機2bに追いつくことはなく、各保護閾値Ra、Rbが接したり重なり合ったりすることはない。
【0095】
すなわち、この場合は、各機2a、2bはともにゴールである滑走路SのノードHにコンフリクトすることなく到達できるため、A→C→D→Hの経路を各機2a、2bの各四次元最適経路として採用することができる。なお、図7〜図9では航空機2a〜2cが実際の縮尺より非常に大きく表現されており、それらと各保護閾値Ra〜Rcとの相対的な大きさは実際の相対的な大きさを反映するものではない。
【0096】
しかし、例えば図8に示すように、大型機2aの前方のノードC、D間のレグ上を飛行する航空機が小型機2cであると、大型機2aの対地速度は小型機2cの対地速度より速いため、例えば図9に示すように、例えばノードD、H間のレグ上で大型機2aが小型機2cに追いつき各保護閾値Ra、Rcが接してしまい、コンフリクトが発生する。そのため、この場合は、大型機2aか小型機2cのいずれか一方の航空機の経路を変更して航空機同士のコンフリクトを回避しなければならない。
【0097】
本実施形態では、このような場合、各航空機がそれぞれ管理空域Aに進入してから退出するまでの全時間についての各経路コストの合計、すなわち本実施形態では各航空機ごとに管理空域Aに進入してから滑走路Sに着陸するまでの全飛行距離が経路コストとして算出されるが、その各航空機ごとの飛行距離の全航空機についての合計が最小となるように、各航空機の四次元最適経路が算出されるようになっている。
【0098】
すなわち、各航空機ごとに見た場合には多少大回りの経路になるとしても、航空機同士のコンフリクトが回避されるという条件下で管理空域A内に存在する航空機ごとの飛行距離が全体として最小になるような経路が、各航空機に対してそれぞれ四次元最適経路として算出されるようになっている。
【0099】
全体的な経路コストを最小にする手法として、本実施形態では、管理空域A内に存在する複数の航空機に対して優先順位を設定し、各航空機がそれぞれ上記のA*アルゴリズムに基づいて四次元最適経路の候補として算出された各レグに沿って進行した場合に航空機同士のコンフリクトが発生する場合には、優先順位が上位の航空機の四次元最適経路の候補の経路を維持し、優先順位が下位の航空機は、その航空機がコンフリクトを生じるレグやノードを通らないという条件下で再度A*アルゴリズムに基づいて四次元最適経路の候補を算出するという手法が採用されている。
【0100】
具体的には、最適経路計算装置31は、管理空域A内に存在する複数の航空機に対して後述するような特別の事情がなければ、複数の航空機に対して任意に優先順位を設定して、上記の要領でA*アルゴリズムに基づいて航空機に対する四次元最適経路の候補を算出する。前述した図6のフローチャートに基づいて説明すれば、ステップS2の次の選択ノードの候補の展開において、優先順位が上位の航空機における算出では現在の選択ノードから展開し得る全てのノードを展開して算出が行われるが、優先順位が下位の航空機における算出ではコンフリクトを生じるノードやコンフリクトを生じるレグを通って到達できるノードを除外した上で展開し得るノードを展開して算出が行われることになる。
【0101】
そして、各航空機ごとの飛行距離を全航空機について合計する。続いて、各航空機に対する優先順位を入れ替えて、再度A*アルゴリズムに基づいて航空機に対する四次元最適経路の候補を算出して、各航空機ごとの飛行距離を全航空機について合計する。そして、優先順位を入れ替えながらこの処理を繰り返し、優先順位入れ替えの全てパターンについてそれぞれ各航空機ごとの飛行距離を全航空機について合計して、合計が最小となる優先順位における各航空機の四次元最適経路の候補を、解である各四次元最適経路として算出するようになっている。
【0102】
なお、管理空域に新たに航空機が進入する場合には、新たに進入する航空機に対する四次元最適経路を算出する必要があり、また、管理空域A内にすでに存在する航空機と新たに進入する航空機とのコンフリクトが発生しないように計算し直す必要がある。そのため、最適経路計算装置31は、管理空域に新たに航空機が進入する場合には、新たに進入する航空機を含めて管理空域A内に存在する全ての航空機について、再度、優先順位を設定して行うA*アルゴリズムに基づいた各航空機に対する各四次元最適経路の算出を行うようになっている。
【0103】
最適経路計算装置31は、以上のようにして、単純にA*アルゴリズムを適用して各航空機に対する各四次元最適経路の候補を算出するだけではなく、その算出結果からコンフリクト発生の有無を確認し、コンフリクトが発生する場合には、新たに条件を付して再度A*アルゴリズムを用いて各航空機に対する各四次元最適経路の候補を算出するようにして、A*アルゴリズムを複合的に用いることで、解である各航空機の四次元最適経路を算出するようになっている。
【0104】
なお、図8や図9に示した例では、他に航空機が存在しなければ、大型機2aと小型機2cの優先順位をいずれを上位としても、一方の航空機にはA→C→D→Hの経路が四次元最適経路として算出され、他方の航空機にはA→C→D→F→G→Hの経路が四次元最適経路として算出されるため、各航空機ごとの飛行距離の航空機全体の合計は、いずれの航空機がいずれの経路を通っても変わらない。そのため、解が一意に決まらない。
【0105】
そこで、このような場合には、他の要件を考慮して各航空機に対する四次元最適経路が決定される。例えば、小型機よりも大型機を優先して滑走路Sに着陸させる場合には、大型機2aにA→C→D→Hの経路を、小型機2cにA→C→D→F→G→Hの経路をそれぞれ四次元最適経路として指示するように構成される。また、例えば、すでに滑走路Sに近い位置にいる航空機を先に着陸させる場合には、小型機2cにA→C→D→Hの経路を、大型機2aにA→C→D→F→G→Hの経路をそれぞれ四次元最適経路として指示するように構成される。例えば、管理空域Areal内に存在する航空機をできるだけ少なくしたい場合にも、対地速度が遅い小型機に長い距離(D→F→G→H)を飛行させるよりも大型機に飛行させた方が短時間で飛行し得るため、後者の経路がそれぞれ指示される。
【0106】
一方、管理空域A内に存在する複数の航空機に対して特別の事情がある場合には、それらの内容を考慮して、優先順位を設定してA*アルゴリズムを行う上記の処理内容等を修正することが必要となる。
【0107】
例えば、管理空域Arealを飛行中の航空機2から、燃料が残り少なくなった、故障やトラブルが発生した等の緊急報告を受信した場合には、当該航空機2を最優先で滑走路Sに着陸させる必要がある。従って、このような場合には、最適経路計算装置31は、緊急報告を発信した当該航空機の優先順位を最上位に固定して、他の航空機の優先順位を入れ替えながら全航空機に対してA*アルゴリズムにより各航空機に対する四次元最適経路を算出するようになっている。
【0108】
このように構成すれば、緊急報告を発信した航空機に対して滑走路Sまでの最短距離である四次元最適経路が的確に算出して、当該航空機を優先して着陸させることが可能となる。
【0109】
また、例えば、管制官等のオペレータが自ら判断したり航空機からの経路変更の要求を受ける等してオペレータが経路変更指令生成装置32を操作して単数または複数の特定の航空機に対する四次元最適経路の変更の指令を行った場合には、オペレータにより変更された特定の航空機に対する四次元最適経路を変更せずに固定した条件下で、それ以外の各航空機の優先順位を入れ替えながら全航空機に対してA*アルゴリズムにより各航空機に対する四次元最適経路を算出するようになっている。
【0110】
このように構成すれば、オペレータにより変更された特定の航空機に対する四次元最適経路を維持した状態で、他の各航空機に対する四次元最適経路を的確に算出することが可能となる。
【0111】
さらに、管理空域Areal内の制限空域は、現時点では範囲が固定された空域として設定されているが、天候や時間帯等によって制限される空域の範囲が変更されることがありうる。そのため、このように制限空域の範囲が天候や時間帯等によって変更される場合、例えば、制限空域の設定範囲が変更される以前と以後のそれぞれについて、管理空域A内における複数のノードNと複数のレグの組み合わせを予め別々に用意しておき、制限空域の設定範囲が変更された段階で、変更された設定範囲に対応する組み合わせに基づいて、各航空機に対する各四次元最適経路を算出するように構成することが可能である。
【0112】
しかし、航空機が制限空域内に進入できないことが、航空機が他の航空機とコンフリクトすることを同視し得ることを利用すれば、各航空機の優先順位を入れ替えながら全航空機に対してA*アルゴリズムにより各航空機に対する四次元最適経路を算出する上記の手法をそのまま用いて航空機が制限空域に進入しないようにすることができる。
【0113】
すなわち、制限空域外だけでなく制限空域内にも予め単数または複数のノードとそれらを結ぶ単数または複数のレグを設定しておき、制限空域が解除されている場合にはそれらのノードやレグも含めて上記の要領で各航空機に対する四次元最適経路を算出し、制限空域が設定された段階で、制限空域を仮想的に優先順位が最上位の航空機として扱い、優先順位を最上位に固定して、上記の要領で各航空機に対する四次元最適経路を算出する。
【0114】
このように構成すれば、制限空域が設定された段階で、制限空域内のノードは、優先順位が下位の航空機が上位の航空機(すなわち制限空域)とのコンフリクトを避けるために通ることができないノードとして扱われて、A*アルゴリズムにおけるノードの選択肢から除外されるため、算出される各航空機に対する四次元最適経路は、各航空機が制限空域内のノードやレグを通らない経路となり、各航空機が制限空域に進入しないようにすることが可能となる。
【0115】
なお、上記の場合、制限空域が設定される段階で、制限空域内のノードに向かうレグ上を航空機が飛行している最中にそのノードが除外されてしまうと、当該航空機は行き場がなくなり、当該航空機の飛行が阻害されるとともに、当該航空機が制限空域への進入を回避しようとしてその周辺にいる航空機の飛行を阻害してしまう可能性がある。そのような事態を避けるため、制限空域が設定される時刻より以前の時刻をもって、制限空域内のノードを除外して、再度A*アルゴリズムによる各航空機に対する四次元最適経路の算出を行うように構成することが好ましい。
【0116】
以上の処理をまとめると、最適経路計算装置31では、図10および図11に示すフローチャートに従って各処理が行われるようになっている。
【0117】
まず、最適経路計算装置31の立ち上がり時等には、管理空域Areal(管理空域A)内に存在する各航空機2に対する四次元最適経路が算出されていないので、最適経路計算装置31は、各航空機2に対する四次元最適経路が算出されていなければ(図10のステップS10;NO)、図11のステップS15以降の各航空機2に対する四次元最適経路の算出フローに移行する。
【0118】
また、すでに各航空機2に対する四次元最適経路が算出されていれば(図10のステップS10;YES)、最適経路計算装置31は、管理空域Arealに新たに進入する航空機があるか(ステップS11)や、管理空域Arealを飛行中の航空機2から緊急報告を受信したか(ステップS12)、経路変更指令生成装置32を介する管制官等のオペレータからの特定の航空機に対する四次元最適経路の変更の指令があったか(ステップS13)、管理空域Areal内の制限空域の設定範囲が変更されるか(ステップS14)をそれぞれ判断する。
【0119】
上記の判断条件のいずれも満たされない場合には(ステップS11〜S14のいずれのNO)、最適経路計算装置31は、ステップS10からステップS14の判断処理を繰り返しながら待機する。また、上記の判断条件のいずれか1つが満たされると(ステップS11〜S14のいずれかYES)、最適経路計算装置31は、図11のステップS15以降の各航空機2に対する四次元最適経路の算出フローに移行する。
【0120】
各航空機2に対する四次元最適経路の算出フローでは、最適経路計算装置31は、各航空機の三次元の位置の情報、対地速度、機体番号等の機体情報を入手していない航空機2があればその航空機2の機体情報を入手し(ステップS15)、管理空域Arealに新たに進入する航空機等の、まだ保護閾値が設定されていない航空機2があれば、記憶手段36に格納されている機種と保護閾値とを対応付けるテーブル等を参照して当該航空機2に対して保護閾値を設定する(ステップS16)。
【0121】
続いて、最適経路計算装置31は、上記のステップS10〜S14の判断処理において付された条件に基づいて管理空域A内に存在する全航空機2に対して優先順位を設定する(ステップS17)。
【0122】
すなわち、上記ステップS10やステップS11の判断処理に基づいてステップS15以降の各航空機2に対する四次元最適経路の算出フローに移行した場合には、全航空機2に対して任意に優先順位を設定する。また、上記ステップS12の判断処理に基づいてステップS15以降の各航空機2に対する四次元最適経路の算出フローに移行した場合には、緊急報告を発信した当該航空機の優先順位を最上位に固定して、他の航空機2に対して任意に優先順位を設定する。
【0123】
さらに、上記ステップS13の判断処理に基づいてステップS15以降の各航空機2に対する四次元最適経路の算出フローに移行した場合には、オペレータにより四次元最適経路が変更された特定の航空機以外の各航空機に対して任意に優先順位を設定する。また、上記ステップS14の判断処理に基づいてステップS15以降の各航空機2に対する四次元最適経路の算出フローに移行した場合には、航空機と見なされた制限空域の優先順位を最上位に固定して、他の航空機2すなわち通常の航空機に対して任意に優先順位を設定する。
【0124】
続いて、最適経路計算装置31は、上記の条件の下で、各航空機2に対して、優先順位を設定して行うA*アルゴリズムに基づいてそれぞれ各四次元最適経路の候補の算出を行う(ステップS18)。
【0125】
この場合、上記ステップS13の判断処理に基づいてオペレータにより四次元最適経路が変更された特定の航空機については、変更された経路が固定されたものとし、改めて四次元最適経路の候補の算出は行われない。また、上記ステップS14の判断処理に基づいて航空機と見なされた制限空域については、優先順位は最上位とされるが、言うまでもなくその四次元最適経路の候補は算出されない。
【0126】
また、本実施形態では、図2の管理空域Aの各ノードNと各ノードNにおける予測コストh(n)とを対応付けるテーブルや各レグLと各レグLの距離(コスト)とを対応付けるテーブルが予め記憶手段36に格納されており、最適経路計算装置31は、上記のA*アルゴリズムに基づく各四次元最適経路の候補の算出においては、それらのテーブルを参照しながら計算を行うようになっている。
【0127】
さらに、前述したように、各航空機がそれぞれA*アルゴリズムに基づいて四次元最適経路の候補として算出された各レグに沿って進行した場合に航空機同士のコンフリクトが発生する場合には、優先順位が上位の航空機の四次元最適経路の候補の経路を維持し、優先順位が下位の航空機は、その航空機がコンフリクトを生じるレグやノードを通らないという条件下で再度A*アルゴリズムに基づいて四次元最適経路の候補を算出する。
【0128】
最適経路計算装置31は、航空機同士のコンフリクトが発生しない解が得られなければ(ステップS19;NO)、すなわち設定した優先順位ではいずれかの航空機同士がコンフリクトを生じてしまう場合には、航空機の優先順位を入れ替えて(ステップS20)、再度ステップS18からの処理を繰り返す。
【0129】
また、最適経路計算装置31は、設定した優先順位において、航空機同士のコンフリクトが発生しない解が得られ(ステップS19;YES)、各機に対してそれぞれ四次元最適経路の候補を算出すると(ステップS21)、続いて、各航空機ごとの四次元最適経路の飛行距離を全航空機について合計する(ステップS22)。
【0130】
そして、各航空機2の優先順位の入れ替えを全パターン行っていなければ(ステップS23;NO)、優先順位を入れ替えて(ステップS24)、ステップS18〜S23の各処理を優先順位の入れ替えの全パターンを終了するまで繰り返す。
【0131】
また、優先順位の入れ替えの全パターンについて算出処理を終了すると(ステップS23;YES)、最適経路計算装置31は、前記合計が最小となる優先順位における各航空機の四次元最適経路の候補を、解である各四次元最適経路として算出して、送受信装置34を介して各航空機2に送信するとともに、経路変更指令生成装置32に送信する(ステップS25)。
【0132】
[効果]
以上のように、本実施形態に係る航空機の四次元最適経路誘導システム1によれば、例えばA*アルゴリズムを用いて管理空域Areal内に進入した複数の航空機2に対してそれぞれ四次元最適経路を算出し、コンフリクトを生じる場合には、複数の航空機2に優先順位を設定して下位の航空機2の経路を迂回させる等の手法を用いることで、航空機同士のコンフリクトを防止する。そして、そのうえで、各航空機の管理空域Arealに進入してから滑走路S等に退出するまでの全時間についての各飛行距離等の各経路コストの合計が最小になるように各航空機に対する各四次元最適経路を算出することで、管理空域Areal内に存在する全航空機の経路を全体的に最適化するように構成した。
【0133】
そのため、航空機2同士のコンフリクトの回避を重視する管制官の管制業務を的確に支援することが可能となるとともに、各航空機2が管理空域Arealに進入してから滑走路Sに着陸するなどして当該管理空域Arealから退出するまでの全時間における最適性が保証され、管制官がそれらを全体的に把握して、総合的に管理することが可能となる。
【0134】
また、インシデントが発生した機体の優先順位を最上位として四次元最適経路の算出を行うことで、当該機体を最優先で滑走路Sに着陸させる等して管理空域Arealから迅速かつ適切に退出させることが可能となる。
【0135】
さらに、管制官等のオペレータによる経路変更があった場合には、その変更された経路を固定した状態で最適化を行うため、算出された四次元最適経路はオペレータの変更要求に応えるものとなるとともに、他の航空機の経路をも同時に最適化されたものとなる。このように、本実施形態に係る航空機の四次元最適経路誘導システム1によれば、インシデントやオペレータによる経路変更に的確に対応することが可能となる。
【0136】
また、A*アルゴリズムを用いて四次元最適経路を算出するように構成することで、図4や図6のフローチャートに示すように、必要な選択ノードの候補のみを展開して(図4や図6のステップS2参照)演算を行うため、遺伝的アルゴリズムやいわゆる総当りで最適経路探索を行う場合のように演算を行う必要のない経路についての演算を行うことがなく、演算時間を大幅に短縮することが可能となる。
【0137】
また、A*アルゴリズムを用いれば、図4に示したような各演算結果を後の演算に用いることが可能となるため、再度の演算が不要となり、その点においても演算の高速化を図ることができる。そのため、管理空域AにおけるノードNの数やレグLの本数、管理空域Aに進入する航空機の機数等にもよるが、各航空機に対する各四次元最適経路の算出をサブ秒〜数秒程度で行うことが可能となり、非常に迅速に四次元最適経路を算出して各航空機に送信することが可能となる。
【0138】
また、A*アルゴリズムを用いれば、上記のようにA*アルゴリズムによる各四次元最適経路の算出結果から容易かつ的確にコンフリクト発生の有無を確認することが可能となる。また、例えば特定のノードを選択しない等の条件を容易に付加して演算を行うことができるため、インシデントや経路変更の要求等の新たな条件が課された場合にも、それらの条件を付加してA*アルゴリズムを複合的に用いることで、容易に条件を付加して演算を行うことが可能となり、種々の条件に対応する最適解を的確に算出することが可能となる。
【0139】
なお、この場合、最初に設定された優先順位の下で行われるA*アルゴリズムに基づく各四次元最適経路の候補の算出において、航空機同士のコンフリクトがまったく発生しない場合には、優先順位を入れ替えての算出を繰り返さずに、算出された各航空機に対する四次元最適経路の候補を解である各四次元最適経路として算出するように構成することが可能である。
【0140】
その理由は、上記の条件で算出された各四次元最適経路の候補は、もともと各航空機に対する最短経路を与えるものであるから、優先順位を入れ替えて再度算出を行っても、各航空機に対して同じ最短経路が算出されるだけであり、同じ結果が得られるからである。
【0141】
そして、このように構成すれば、算出を繰り返さずに即座に解である各四次元最適経路を算出して各航空機に送信することが可能となり、四次元最適経路の算出に要する時間を短縮することが可能となるとともに、迅速に各航空機に四次元最適経路を送信して指示することが可能となる。
【0142】
[第2の実施の形態]
上記の第1の実施形態では、複数の航空機2に対して、各航空機2の管理空域Arealに進入してから滑走路S等に退出するまでの全時間についての各飛行距離等の各経路コストの合計が最小になるように各航空機2に対する各四次元最適経路を算出し、管理空域Areal内に存在する全航空機2の経路を全体的に最適化するような理想的な経路を算出する場合について説明した。
【0143】
しかし、例えば、航空機2が多数存在し、交通量が多いような管理空域Arealにおいて、上記のように、各航空機2に対して優先順位を入れ替えながら繰り返し四次元最適経路の候補を算出して各航空機2の優先順位の入れ替えを全パターン行って全航空機2の経路を全体的に最適化すると、処理に時間がかかり、実際の航空管制には採用し難く、航空機側の迅速に経路を指示してほしいという要望に必ずしも的確に応えられない場合がある。
【0144】
また、上記のように、本発明では、A*アルゴリズム等を用いて、各航空機2に対してそれぞれ算出された例えば最短の経路等の経路コストが最小になるような最適な四次元経路(四次元最適経路)の候補をベースとして、もし航空機同士のコンフリクトがある場合にはその場合にのみ優先順位が下位の航空機2の経路を変更するものである。
【0145】
このように、もともと最適な経路である四次元最適経路をベースとするものであることから、コンフリクトを避けるために経路が変更されるとしても、さほど不合理な経路変更がなされるわけではない。
【0146】
そのため、任意に、或いは所定の要件を考慮して最初に設定した優先順位に従って航空機同士のコンフリクトが発生しない解が得られるのであれば、それに基づく各四次元最適経路を各航空機2に送信して指示しても実際の航空管制上何ら問題はなく、航空機側の迅速な経路指示の要望に的確に応えるものとなる。
【0147】
第2の実施形態は、このような観点から構成されたものである。具体的には、第2の実施形態に係る航空機の四次元最適経路誘導システムは、各航空機2や地上局3等の全体構成は、図1に示した第1の実施形態に係る航空機の四次元最適経路誘導システム1の場合と同様であるが、地上局3の最適経路計算装置31における処理が第1の実施形態の場合と多少異なる。
【0148】
すなわち、本実施形態における最適経路計算装置31では、図10に示したステップS10からステップS14までの判断処理は第1の実施形態の場合と同様に処理されるが、図11に示したステップS15以降の処理が多少異なる。
【0149】
本実施形態では、最適経路計算装置31は、図10のフローチャートにおけるステップS10からステップS14までの判断処理のいずれかにおいて判断条件が満たされると(ステップS11〜S14のいずれかYES)、図12のフローチャートに示す各処理に移行する。
【0150】
そして、最適経路計算装置31は、第1の実施形態と同様に、各航空機の三次元の位置の情報等の機体情報を入手していない航空機2があればその航空機2の機体情報を入手し(ステップS15)、管理空域Arealに新たに進入する航空機等に対して保護閾値を設定し(ステップS16)、上記のステップS10〜S14の判断処理において付された条件等に基づいて管理空域A内に存在する全航空機2に対して優先順位を設定する(ステップS17)。
【0151】
続いて、最適経路計算装置31は、上記の条件の下で、各航空機2に対して、優先順位を設定して行うA*アルゴリズムに基づいてそれぞれ各四次元最適経路の候補の算出を行い(ステップS18)、航空機同士のコンフリクトが発生しない解が得られなければ(ステップS19;NO)、航空機の優先順位を入れ替えて(ステップS20)、再度ステップS18からの処理を繰り返す。ここまでは第1の実施形態と同様である。
【0152】
しかし、本実施形態では、最適経路計算装置31は、設定した優先順位で航空機同士のコンフリクトが発生しない解が得られた場合には(ステップS19;YES)、各機に対してそれぞれ四次元最適経路の候補を算出して、算出した各四次元最適経路を送受信装置34を介して即座に各航空機2に送信するとともに、経路変更指令生成装置32に送信するようになっている(ステップS26)。
【0153】
そして、このように構成することで、前述したように、合理的な四次元最適経路を各航空機2に対して迅速に送信して指示することが可能となる。
【0154】
なお、上記の第1および第2の実施形態では、管理空域Arealに新たに航空機が進入する場合に解が見出せない場合、すなわち新たに進入する航空機を含む全航空機2に対する各四次元最適経路を算出できない場合には、管理空域Arealに新たに進入しようとする航空機を管理空域Areal外で待機させるようになっている。そして、もともと管理空域Areal内にいた各航空機2に従前の各自の四次元最適経路を飛行させ、所定時間経過後に各航空機2の位置等が移動する等して条件が変化した段階で改めて新たに進入する航空機を含む全航空機2に対する各四次元最適経路の算出を行うようになっている。
【0155】
また、このように構成する代わりに、例えば図2のように設定されたノードNやレグLの他に、例えば旋回して待機するためのノードやレグを設定することも可能であり、このように設定すれば、上記のような状況で単数または複数の航空機が待機用のノードを通過しながら待機することを含む解が見出されるようになる。
【0156】
さらに、航空機2が算出された四次元最適経路から外れて飛行する場合には、管理空域Areal内に存在する全航空機2に対する四次元最適経路の算出をやり直すように構成することも可能である。
【0157】
また、上記の各実施形態では、航空機2が管理空域Arealに進入した後、滑走路Sに着陸することで管理空域Arealから退出する場合について説明したが、本発明はこのような形態には限定されない。
【0158】
例えば、複数の航空機2が管理空域Arealの上空に設定された単数または複数の所定の進入ポイント(ノードまたはウェイポイント)から進入して同様に上空に設定された単数または複数の所定の退出ポイントから退出し、進入ポイントと退出ポイントとの間に複数のノード(ウェイポイント)やそれらを結ぶ複数のレグが設定されているような場合にも本発明は適用される。
【0159】
また、例えば管理空域Areal内に航空機が離着陸する滑走路を複数備え、それらの滑走路間を飛行する全ての航空機に対してそれぞれ四次元最適経路を算出するような場合にも適用できる。さらには、それらの滑走路間を飛行する航空機のみならず、管理空域Areal外から進入して管理空域Areal内の滑走路に着陸する航空機、滑走路から離陸して管理空域Areal外に退出する航空機、管理空域Areal外から進入して管理空域Areal外に退出する航空機等を含めた全ての航空機に対して四次元最適経路を算出するような場合にも適用可能である。
【0160】
さらに、上記の各実施形態では、航空機2が管理空域Arealに進入してから退出するまでの全時間についての経路コストとして、当該航空機2の各レグに沿った全飛行距離を設定し、各航空機2の全飛行距離の合計が最小となるようにそれぞれ四次元最適経路を算出する場合について説明した。そして、四次元最適経路を算出するためのA*アルゴリズムに計算に必要となるコストとして各レグの実際の距離(各ノード間の実際の距離)を用い、予測コスト(ヒューリスティック)h(n)として各レグの実際の距離に基づいて設定した値を用いる場合について説明した。
【0161】
しかし、経路コストやコスト、予測コストの設定の仕方はこれに限定されるものではなく、この他にも、例えば、航空機2が管理空域Arealに進入してから退出するまでの全時間についての経路コストとして、当該航空機2が管理空域Arealに進入してから退出するまでの全飛行時間を設定したり、或いは当該航空機2が管理空域Arealに進入してから退出するまでの全燃料消費量を設定したりすることが可能である。
【0162】
例えば、航空機2が管理空域Arealに進入してから退出するまでの全時間についての経路コストとして、当該航空機2が管理空域Arealに進入してから退出するまでの全飛行時間を設定する場合には、コストとして各レグ(各ノード間)の飛行に要する時間を用い、予測コストh(n)として各レグの飛行に要する時間に基づいて設定した値を用いるように設定される。
【0163】
このように構成した場合、各航空機2が各自に算出された四次元最適経路に沿って飛行すると、管理空域Areal内に存在する全航空機2の飛行時間の合計が最小となるような四次元最適経路を各航空機2に対してそれぞれ算出することが可能となる。そして、例えば、インシデントが発生した機体があれば、その機体の優先順位を最上位として四次元最適経路の算出を行うことで、当該機体を最小の飛行時間で最優先に滑走路Sに着陸させる等して管理空域Arealから迅速かつ適切に退出させることが可能となる。
【0164】
また、例えば、航空機2が管理空域Arealに進入してから退出するまでの全時間についての経路コストとして、当該航空機2が管理空域Arealに進入してから退出するまでの全燃料消費量を設定する場合には、コストとして各レグ(各ノード間)の飛行に要する燃料消費量を用い、予測コストh(n)として各レグの飛行に要する燃料消費量に基づいて設定した値を用いるように設定される。
【0165】
このように構成した場合、各航空機2が各自に算出された四次元最適経路に沿って飛行すると、管理空域Areal内に存在する全航空機2の燃料消費量の合計が最小となるような四次元最適経路を各航空機2に対してそれぞれ算出することが可能となる。そして、例えば、燃料の残量が乏しくなった機体があれば、例えばその機体をインシデントが発生した機体として優先順位を最上位として四次元最適経路の算出を行うことで、当該機体を最小の燃料消費量で最優先に滑走路Sに着陸させる等して管理空域Arealから適切に退出させることが可能となる。
【図面の簡単な説明】
【0166】
【図1】航空機の四次元最適経路誘導システムの構成を示す図である。
【図2】最適経路計算装置の仮想空間上に設定された管理空域やノード、レグを表す図である。
【図3】簡略化されたノードとレグの組み合わせを示す図である。
【図4】A*アルゴリズムにおけるノード選択の要領を説明する図である。
【図5】図3において見出された最短経路を示す図である。
【図6】A*アルゴリズムにおける処理の手順を示すフローチャートである。
【図7】図5の最短経路に沿って飛行する2機の大型機を模式的に示す図である。
【図8】図5の最短経路に沿って飛行する大型機と小型機を模式的に示す図である。
【図9】図8において大型機が小型機に追いついてコンフリクトが発生することを説明する図である。
【図10】第1および第2の実施形態に係る最適経路計算装置における処理の手順を示すフローチャートである。
【図11】第1の実施形態に係る最適経路計算装置における処理の手順を示すフローチャートである。
【図12】第2の実施形態に係る最適経路計算装置における処理の手順を示すフローチャートである。
【符号の説明】
【0167】
1 航空機の四次元最適経路誘導システム
2、2a〜2c 航空機
31 最適経路計算装置
32 経路変更指令生成装置
33 表示手段
34 送受信装置
A、Areal 管理空域
h(n) 予測コスト
L レグ
N ノード
Ra〜Rc 保護閾値
S 滑走路
【特許請求の範囲】
【請求項1】
管理空域内に存在する複数の航空機について、前記複数の航空機の各機体情報をそれぞれ入手し、前記航空機同士のコンフリクトがない状態で、前記各航空機がそれぞれ当該管理空域に進入してから退出するまでの全時間についての各経路コストが最小になるように前記各航空機に対する各四次元最適経路を算出する最適経路計算装置と、
前記複数の航空機から各機体情報を受信して前記最適経路計算装置に送信し、前記最適経路計算装置が算出した前記各四次元最適経路を前記各航空機に対してそれぞれ送信する送受信装置と、
を備えることを特徴とする航空機の四次元最適経路誘導システム。
【請求項2】
管理空域内に存在する複数の航空機について、前記複数の航空機の各機体情報をそれぞれ入手し、前記航空機同士のコンフリクトがない状態で、前記各航空機がそれぞれ当該管理空域に進入してから退出するまでの全時間についての各経路コストの合計が最小になるように前記各航空機に対する各四次元最適経路を算出する最適経路計算装置と、
前記複数の航空機から各機体情報を受信して前記最適経路計算装置に送信し、前記最適経路計算装置が算出した前記各四次元最適経路を前記各航空機に対してそれぞれ送信する送受信装置と、
を備えることを特徴とする航空機の四次元最適経路誘導システム。
【請求項3】
前記航空機が前記管理空域に進入してから退出するまでの全時間についての前記経路コストは、当該航空機が当該管理空域に進入してから退出するまでの全飛行距離であることを特徴とする請求項1または請求項2に記載の航空機の四次元最適経路誘導システム。
【請求項4】
前記航空機が前記管理空域に進入してから退出するまでの全時間についての前記経路コストは、当該航空機が当該管理空域に進入してから退出するまでの全飛行時間であることを特徴とする請求項1または請求項2に記載の航空機の四次元最適経路誘導システム。
【請求項5】
前記航空機が前記管理空域に進入してから退出するまでの全時間についての前記経路コストは、当該航空機が当該管理空域に進入してから退出するまでの全燃料消費量であることを特徴とする請求項1または請求項2に記載の航空機の四次元最適経路誘導システム。
【請求項6】
前記最適経路計算装置は、前記管理空域内に存在する複数の航空機にそれぞれ保護閾値を設定し、前記航空機同士の前記各保護閾値が接する場合には前記航空機同士のコンフリクトが生じると判定し、一方の航空機の経路を変更して前記航空機同士のコンフリクトを回避して、前記各航空機がそれぞれ当該管理空域に進入してから退出するまでの全時間についての各経路コストまたは前記各経路コストの合計が最小になるように前記各航空機に対する各四次元最適経路を算出することを特徴とする請求項1から請求項5のいずれか一項に記載の航空機の四次元最適経路誘導システム。
【請求項7】
前記最適経路計算装置は、前記管理空域に新たに航空機が進入する場合には、前記新たに進入する航空機を含めた前記管理空域内に存在する全ての前記航空機について、再度、前記航空機同士のコンフリクトがない状態で、前記各航空機がそれぞれ当該管理空域に進入してから退出するまでの全時間についての各経路コストまたは前記各経路コストの合計が最小になるように前記各航空機に対する各四次元最適経路を算出することを特徴とする請求項1から請求項6のいずれか一項に記載の航空機の四次元最適経路誘導システム。
【請求項8】
前記最適経路計算装置は、前記送受信装置を介して前記航空機から緊急報告を受信した場合には、前記緊急報告を発信した当該航空機自体の前記経路コストが最小となるように経路を算出する条件下で、再度、前記航空機同士のコンフリクトがない状態で、前記各航空機がそれぞれ当該管理空域に進入してから退出するまでの全時間についての各経路コストまたは前記各経路コストの合計が最小になるように前記各航空機に対する各四次元最適経路を算出することを特徴とする請求項1から請求項7のいずれか一項に記載の航空機の四次元最適経路誘導システム。
【請求項9】
前記最適経路計算装置が算出した前記複数の航空機に対する前記各四次元最適経路を画面上に表示する表示手段を有し、前記最適経路計算装置に対して特定の航空機に対する四次元最適経路の変更を指令可能な経路変更指令生成装置を備えることを特徴とする請求項1から請求項8のいずれか一項に記載の航空機の四次元最適経路誘導システム。
【請求項10】
前記最適経路計算装置は、前記経路変更指令生成装置から前記四次元最適経路の変更の指令を受けた場合には、変更された経路を変更しない条件下で、再度、前記航空機同士のコンフリクトがない状態で、前記各航空機がそれぞれ当該管理空域に進入してから退出するまでの全時間についての各経路コストまたは前記各経路コストの合計が最小になるように前記各航空機に対する各四次元最適経路を算出することを特徴とする請求項9に記載の航空機の四次元最適経路誘導システム。
【請求項11】
前記最適経路計算装置は、前記管理空域内に複数のノードと前記ノード間を結ぶ複数のレグを予め設定し、前記複数のノードにそれぞれ予測コストを予め設定し、前記複数のレグにそれぞれコストを予め設定し、所定の前記ノードをゴールとし、前記航空機が当該管理空域に進入してから前記ゴールに退出するまでの経路の各レグのコストの総和を前記航空機が当該管理空域に進入してから退出するまでの全時間についての経路コストとして算出し、A*アルゴリズムに基づいて、前記各航空機に対して、前記各経路コストがそれぞれ最小になるように当該航空機が当該管理空域に進入してから前記ゴールに退出するまでの全レグを前記四次元最適経路の候補として算出することを特徴とする請求項1から請求項10のいずれか一項に記載の航空機の四次元最適経路誘導システム。
【請求項12】
前記ゴールとされる所定のノードは、滑走路に設定されていることを特徴とする請求項11に記載の航空機の四次元最適経路誘導システム。
【請求項13】
前記最適経路計算装置は、前記管理空域内に存在する前記複数の航空機に対して優先順位を設定し、前記複数の航空機がA*アルゴリズムに基づいて前記各四次元最適経路の候補として算出された各レグに沿ってそれぞれ進行した場合に、前記航空機同士のコンフリクトが発生する場合には、前記優先順位が上位の航空機の前記四次元最適経路の候補を維持し、前記優先順位が下位の航空機については、当該航空機がコンフリクトを生じる前記レグまたは前記ノードを通らないという条件下で、再度A*アルゴリズムに基づいて前記四次元最適経路の候補を算出することを特徴とする請求項11または請求項12に記載の航空機の四次元最適経路誘導システム。
【請求項14】
前記最適経路計算装置は、前記複数の航空機に対する前記優先順位を設定し、前記複数の航空機がA*アルゴリズムに基づいて前記各四次元最適経路の候補として算出された各レグに沿ってそれぞれ進行した場合に、前記航空機同士のコンフリクトが発生する場合には、前記航空機同士のコンフリクトが発生する場合には、前記優先順位が上位の航空機の前記四次元最適経路の候補を維持し、前記優先順位が下位の航空機については前記条件下で再度A*アルゴリズムに基づいて前記四次元最適経路の候補を算出し、前記航空機同士のコンフリクトが発生しない解が得られた場合には、前記解において前記各航空機に対して算出された前記各四次元最適経路の候補を、解である前記各四次元最適経路として算出することを特徴とする請求項13に記載の航空機の四次元最適経路誘導システム。
【請求項15】
前記最適経路計算装置は、前記複数の航空機に対する前記優先順位を設定し、前記複数の航空機がA*アルゴリズムに基づいて前記各四次元最適経路の候補として算出された各レグに沿ってそれぞれ進行した場合に、前記航空機同士のコンフリクトが発生する場合には、前記優先順位が上位の航空機の前記四次元最適経路の候補を維持し、前記優先順位が下位の航空機については前記条件下で再度A*アルゴリズムに基づいて前記四次元最適経路の候補を算出して、前記各航空機がそれぞれ当該管理空域に進入してから退出するまでの全時間についての各経路コストの合計を算出し、前記各経路コストの合計を算出する処理を、前記複数の航空機に対する前記優先順位を入れ替えながら繰り返して、算出された前記各経路コストの合計が最小となる前記各四次元最適経路の候補を、解である前記各四次元最適経路として算出することを特徴とする請求項13に記載の航空機の四次元最適経路誘導システム。
【請求項16】
前記最適経路計算装置は、前記複数の航空機に対する前記優先順位を設定し、前記複数の航空機がA*アルゴリズムに基づいて前記各四次元最適経路の候補として算出された各レグに沿ってそれぞれ進行した場合に、前記航空機同士のコンフリクトが発生しない場合には、前記各航空機に対して算出された前記各四次元最適経路の候補を、解である前記各四次元最適経路として算出することを特徴とする請求項15に記載の航空機の四次元最適経路誘導システム。
【請求項17】
前記最適経路計算装置は、前記管理空域に新たに航空機が進入する場合には、前記新たに進入する航空機を含めた前記管理空域内に存在する全ての前記航空機について、再度、前記優先順位を設定して、前記各航空機に対する前記各四次元最適経路の候補を算出することを特徴とする請求項13から請求項16のいずれか一項に記載の航空機の四次元最適経路誘導システム。
【請求項18】
前記最適経路計算装置は、前記送受信装置を介して前記航空機から緊急報告を受信した場合には、前記緊急報告を発信した当該航空機の前記優先順位を最上位に固定して、前記各航空機に対する前記各四次元最適経路の候補を算出することを特徴とする請求項13から請求項17のいずれか一項に記載の航空機の四次元最適経路誘導システム。
【請求項19】
前記最適経路計算装置が算出した前記複数の航空機に対する前記各四次元最適経路を画面上に表示する表示手段を有し、前記最適経路計算装置に対して特定の航空機に対する四次元最適経路の変更を指令可能な経路変更指令生成装置を備え、
前記最適経路計算装置は、前記経路変更指令生成装置から前記四次元最適経路の変更の指令を受けた場合には、変更された経路を変更しない条件下で、前記経路が変更されなかった航空機に対して前記優先順位を設定して、前記各航空機に対する前記各四次元最適経路の候補を算出することを特徴とする請求項13から請求項18のいずれか一項に記載の航空機の四次元最適経路誘導システム。
【請求項20】
前記最適経路計算装置は、前記管理空域内の制限空域の設定が時間的に変更される場合、前記制限空域の設定が変更される以前と以後の前記管理空域についてそれぞれ前記複数のノードと前記複数のレグの組み合わせを予め用意しておき、前記制限空域の設定が変更された段階で、変更された前記設定に対応する前記組み合わせに基づいて前記各航空機に対する前記各四次元最適経路の候補を算出することを特徴とする請求項13から請求項19のいずれか一項に記載の航空機の四次元最適経路誘導システム。
【請求項21】
前記最適経路計算装置は、前記管理空域内の制限空域の設定が時間的に変更される場合、前記制限空域内にも予め単数または複数のノードとそれらを結ぶ単数または複数のレグを設定しておき、前記制限空域が設定された段階で、前記制限空域を仮想的に前記優先順位が最上位の航空機として扱って、前記各航空機に対する前記各四次元最適経路の候補を算出することを特徴とする請求項13から請求項19のいずれか一項に記載の航空機の四次元最適経路誘導システム。
【請求項1】
管理空域内に存在する複数の航空機について、前記複数の航空機の各機体情報をそれぞれ入手し、前記航空機同士のコンフリクトがない状態で、前記各航空機がそれぞれ当該管理空域に進入してから退出するまでの全時間についての各経路コストが最小になるように前記各航空機に対する各四次元最適経路を算出する最適経路計算装置と、
前記複数の航空機から各機体情報を受信して前記最適経路計算装置に送信し、前記最適経路計算装置が算出した前記各四次元最適経路を前記各航空機に対してそれぞれ送信する送受信装置と、
を備えることを特徴とする航空機の四次元最適経路誘導システム。
【請求項2】
管理空域内に存在する複数の航空機について、前記複数の航空機の各機体情報をそれぞれ入手し、前記航空機同士のコンフリクトがない状態で、前記各航空機がそれぞれ当該管理空域に進入してから退出するまでの全時間についての各経路コストの合計が最小になるように前記各航空機に対する各四次元最適経路を算出する最適経路計算装置と、
前記複数の航空機から各機体情報を受信して前記最適経路計算装置に送信し、前記最適経路計算装置が算出した前記各四次元最適経路を前記各航空機に対してそれぞれ送信する送受信装置と、
を備えることを特徴とする航空機の四次元最適経路誘導システム。
【請求項3】
前記航空機が前記管理空域に進入してから退出するまでの全時間についての前記経路コストは、当該航空機が当該管理空域に進入してから退出するまでの全飛行距離であることを特徴とする請求項1または請求項2に記載の航空機の四次元最適経路誘導システム。
【請求項4】
前記航空機が前記管理空域に進入してから退出するまでの全時間についての前記経路コストは、当該航空機が当該管理空域に進入してから退出するまでの全飛行時間であることを特徴とする請求項1または請求項2に記載の航空機の四次元最適経路誘導システム。
【請求項5】
前記航空機が前記管理空域に進入してから退出するまでの全時間についての前記経路コストは、当該航空機が当該管理空域に進入してから退出するまでの全燃料消費量であることを特徴とする請求項1または請求項2に記載の航空機の四次元最適経路誘導システム。
【請求項6】
前記最適経路計算装置は、前記管理空域内に存在する複数の航空機にそれぞれ保護閾値を設定し、前記航空機同士の前記各保護閾値が接する場合には前記航空機同士のコンフリクトが生じると判定し、一方の航空機の経路を変更して前記航空機同士のコンフリクトを回避して、前記各航空機がそれぞれ当該管理空域に進入してから退出するまでの全時間についての各経路コストまたは前記各経路コストの合計が最小になるように前記各航空機に対する各四次元最適経路を算出することを特徴とする請求項1から請求項5のいずれか一項に記載の航空機の四次元最適経路誘導システム。
【請求項7】
前記最適経路計算装置は、前記管理空域に新たに航空機が進入する場合には、前記新たに進入する航空機を含めた前記管理空域内に存在する全ての前記航空機について、再度、前記航空機同士のコンフリクトがない状態で、前記各航空機がそれぞれ当該管理空域に進入してから退出するまでの全時間についての各経路コストまたは前記各経路コストの合計が最小になるように前記各航空機に対する各四次元最適経路を算出することを特徴とする請求項1から請求項6のいずれか一項に記載の航空機の四次元最適経路誘導システム。
【請求項8】
前記最適経路計算装置は、前記送受信装置を介して前記航空機から緊急報告を受信した場合には、前記緊急報告を発信した当該航空機自体の前記経路コストが最小となるように経路を算出する条件下で、再度、前記航空機同士のコンフリクトがない状態で、前記各航空機がそれぞれ当該管理空域に進入してから退出するまでの全時間についての各経路コストまたは前記各経路コストの合計が最小になるように前記各航空機に対する各四次元最適経路を算出することを特徴とする請求項1から請求項7のいずれか一項に記載の航空機の四次元最適経路誘導システム。
【請求項9】
前記最適経路計算装置が算出した前記複数の航空機に対する前記各四次元最適経路を画面上に表示する表示手段を有し、前記最適経路計算装置に対して特定の航空機に対する四次元最適経路の変更を指令可能な経路変更指令生成装置を備えることを特徴とする請求項1から請求項8のいずれか一項に記載の航空機の四次元最適経路誘導システム。
【請求項10】
前記最適経路計算装置は、前記経路変更指令生成装置から前記四次元最適経路の変更の指令を受けた場合には、変更された経路を変更しない条件下で、再度、前記航空機同士のコンフリクトがない状態で、前記各航空機がそれぞれ当該管理空域に進入してから退出するまでの全時間についての各経路コストまたは前記各経路コストの合計が最小になるように前記各航空機に対する各四次元最適経路を算出することを特徴とする請求項9に記載の航空機の四次元最適経路誘導システム。
【請求項11】
前記最適経路計算装置は、前記管理空域内に複数のノードと前記ノード間を結ぶ複数のレグを予め設定し、前記複数のノードにそれぞれ予測コストを予め設定し、前記複数のレグにそれぞれコストを予め設定し、所定の前記ノードをゴールとし、前記航空機が当該管理空域に進入してから前記ゴールに退出するまでの経路の各レグのコストの総和を前記航空機が当該管理空域に進入してから退出するまでの全時間についての経路コストとして算出し、A*アルゴリズムに基づいて、前記各航空機に対して、前記各経路コストがそれぞれ最小になるように当該航空機が当該管理空域に進入してから前記ゴールに退出するまでの全レグを前記四次元最適経路の候補として算出することを特徴とする請求項1から請求項10のいずれか一項に記載の航空機の四次元最適経路誘導システム。
【請求項12】
前記ゴールとされる所定のノードは、滑走路に設定されていることを特徴とする請求項11に記載の航空機の四次元最適経路誘導システム。
【請求項13】
前記最適経路計算装置は、前記管理空域内に存在する前記複数の航空機に対して優先順位を設定し、前記複数の航空機がA*アルゴリズムに基づいて前記各四次元最適経路の候補として算出された各レグに沿ってそれぞれ進行した場合に、前記航空機同士のコンフリクトが発生する場合には、前記優先順位が上位の航空機の前記四次元最適経路の候補を維持し、前記優先順位が下位の航空機については、当該航空機がコンフリクトを生じる前記レグまたは前記ノードを通らないという条件下で、再度A*アルゴリズムに基づいて前記四次元最適経路の候補を算出することを特徴とする請求項11または請求項12に記載の航空機の四次元最適経路誘導システム。
【請求項14】
前記最適経路計算装置は、前記複数の航空機に対する前記優先順位を設定し、前記複数の航空機がA*アルゴリズムに基づいて前記各四次元最適経路の候補として算出された各レグに沿ってそれぞれ進行した場合に、前記航空機同士のコンフリクトが発生する場合には、前記航空機同士のコンフリクトが発生する場合には、前記優先順位が上位の航空機の前記四次元最適経路の候補を維持し、前記優先順位が下位の航空機については前記条件下で再度A*アルゴリズムに基づいて前記四次元最適経路の候補を算出し、前記航空機同士のコンフリクトが発生しない解が得られた場合には、前記解において前記各航空機に対して算出された前記各四次元最適経路の候補を、解である前記各四次元最適経路として算出することを特徴とする請求項13に記載の航空機の四次元最適経路誘導システム。
【請求項15】
前記最適経路計算装置は、前記複数の航空機に対する前記優先順位を設定し、前記複数の航空機がA*アルゴリズムに基づいて前記各四次元最適経路の候補として算出された各レグに沿ってそれぞれ進行した場合に、前記航空機同士のコンフリクトが発生する場合には、前記優先順位が上位の航空機の前記四次元最適経路の候補を維持し、前記優先順位が下位の航空機については前記条件下で再度A*アルゴリズムに基づいて前記四次元最適経路の候補を算出して、前記各航空機がそれぞれ当該管理空域に進入してから退出するまでの全時間についての各経路コストの合計を算出し、前記各経路コストの合計を算出する処理を、前記複数の航空機に対する前記優先順位を入れ替えながら繰り返して、算出された前記各経路コストの合計が最小となる前記各四次元最適経路の候補を、解である前記各四次元最適経路として算出することを特徴とする請求項13に記載の航空機の四次元最適経路誘導システム。
【請求項16】
前記最適経路計算装置は、前記複数の航空機に対する前記優先順位を設定し、前記複数の航空機がA*アルゴリズムに基づいて前記各四次元最適経路の候補として算出された各レグに沿ってそれぞれ進行した場合に、前記航空機同士のコンフリクトが発生しない場合には、前記各航空機に対して算出された前記各四次元最適経路の候補を、解である前記各四次元最適経路として算出することを特徴とする請求項15に記載の航空機の四次元最適経路誘導システム。
【請求項17】
前記最適経路計算装置は、前記管理空域に新たに航空機が進入する場合には、前記新たに進入する航空機を含めた前記管理空域内に存在する全ての前記航空機について、再度、前記優先順位を設定して、前記各航空機に対する前記各四次元最適経路の候補を算出することを特徴とする請求項13から請求項16のいずれか一項に記載の航空機の四次元最適経路誘導システム。
【請求項18】
前記最適経路計算装置は、前記送受信装置を介して前記航空機から緊急報告を受信した場合には、前記緊急報告を発信した当該航空機の前記優先順位を最上位に固定して、前記各航空機に対する前記各四次元最適経路の候補を算出することを特徴とする請求項13から請求項17のいずれか一項に記載の航空機の四次元最適経路誘導システム。
【請求項19】
前記最適経路計算装置が算出した前記複数の航空機に対する前記各四次元最適経路を画面上に表示する表示手段を有し、前記最適経路計算装置に対して特定の航空機に対する四次元最適経路の変更を指令可能な経路変更指令生成装置を備え、
前記最適経路計算装置は、前記経路変更指令生成装置から前記四次元最適経路の変更の指令を受けた場合には、変更された経路を変更しない条件下で、前記経路が変更されなかった航空機に対して前記優先順位を設定して、前記各航空機に対する前記各四次元最適経路の候補を算出することを特徴とする請求項13から請求項18のいずれか一項に記載の航空機の四次元最適経路誘導システム。
【請求項20】
前記最適経路計算装置は、前記管理空域内の制限空域の設定が時間的に変更される場合、前記制限空域の設定が変更される以前と以後の前記管理空域についてそれぞれ前記複数のノードと前記複数のレグの組み合わせを予め用意しておき、前記制限空域の設定が変更された段階で、変更された前記設定に対応する前記組み合わせに基づいて前記各航空機に対する前記各四次元最適経路の候補を算出することを特徴とする請求項13から請求項19のいずれか一項に記載の航空機の四次元最適経路誘導システム。
【請求項21】
前記最適経路計算装置は、前記管理空域内の制限空域の設定が時間的に変更される場合、前記制限空域内にも予め単数または複数のノードとそれらを結ぶ単数または複数のレグを設定しておき、前記制限空域が設定された段階で、前記制限空域を仮想的に前記優先順位が最上位の航空機として扱って、前記各航空機に対する前記各四次元最適経路の候補を算出することを特徴とする請求項13から請求項19のいずれか一項に記載の航空機の四次元最適経路誘導システム。
【図1】


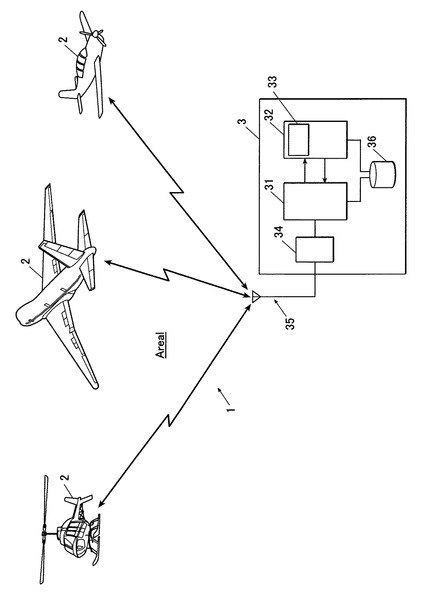
【図2】
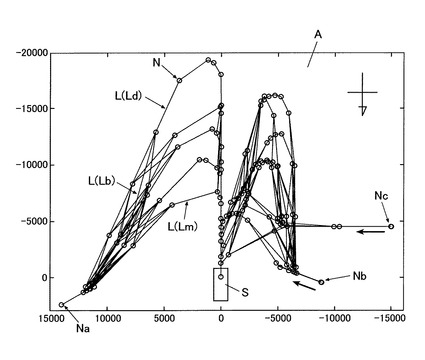
【図3】
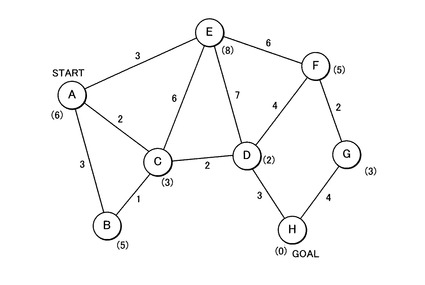
【図4】
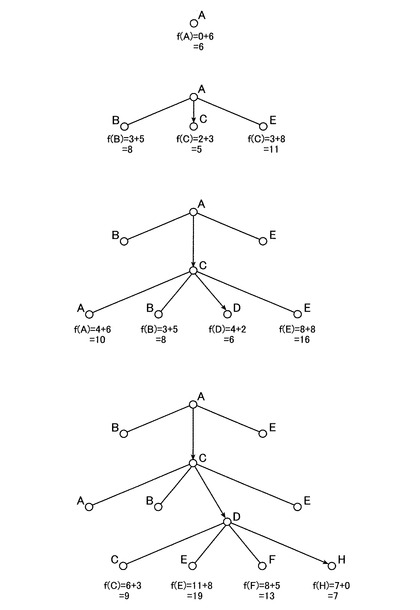
【図5】
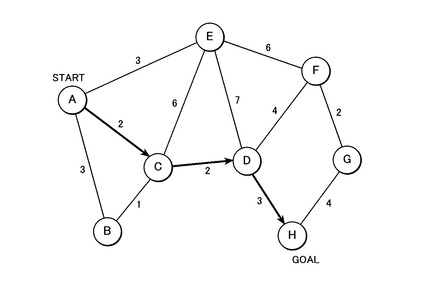
【図6】
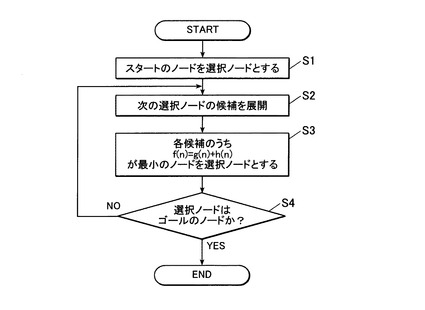
【図7】
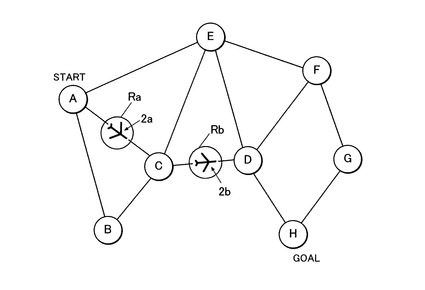
【図8】
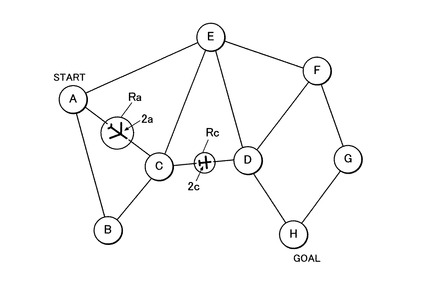
【図9】
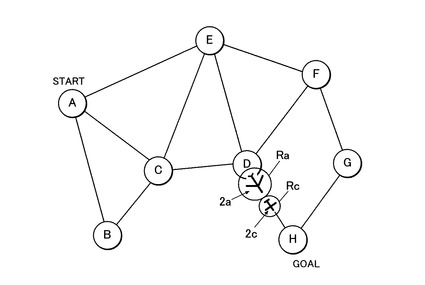
【図10】
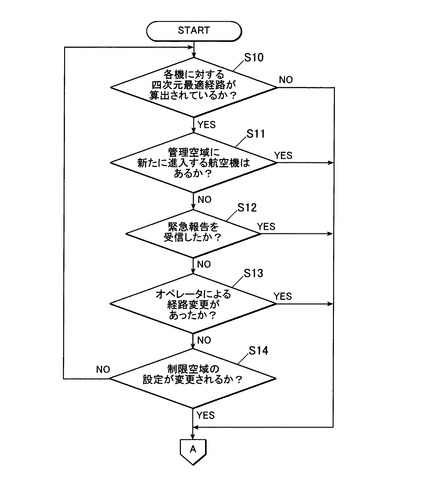
【図11】
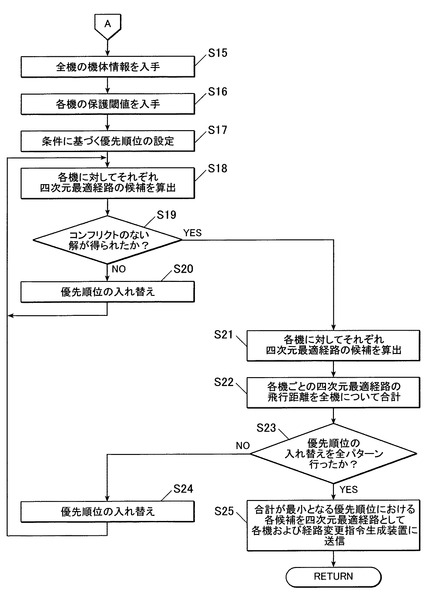
【図12】
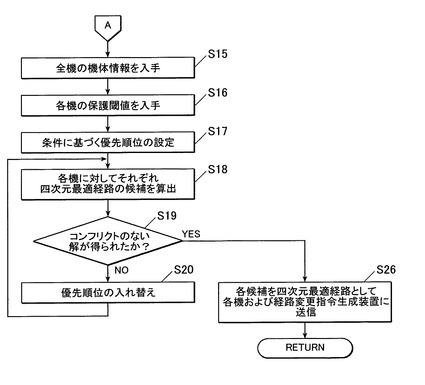
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2009−251729(P2009−251729A)
【公開日】平成21年10月29日(2009.10.29)
【国際特許分類】
【出願番号】特願2008−96105(P2008−96105)
【出願日】平成20年4月2日(2008.4.2)
【出願人】(000005348)富士重工業株式会社 (3,010)
【出願人】(503361400)独立行政法人 宇宙航空研究開発機構 (453)
【Fターム(参考)】
【公開日】平成21年10月29日(2009.10.29)
【国際特許分類】
【出願日】平成20年4月2日(2008.4.2)
【出願人】(000005348)富士重工業株式会社 (3,010)
【出願人】(503361400)独立行政法人 宇宙航空研究開発機構 (453)
【Fターム(参考)】
[ Back to top ]