
航空機の機械部品の疲労を測定するシステムおよび方法、ならびに航空機メンテナンス方法
機械的応力に曝される航空機の部品(7、8、P、P’、9a、6’)の疲労を測定するシステムは、部品(7、8、P、P’、9a、6’)に実装された複数の応力センサ(Ci)を含み、各センサは、所定の機械的応力閾値(S(Ci))を検出し、この閾値(S(Ci))の超過を表すデータ信号(Si)を配信するようになっている;システムは、これらのデータを記録する手段(11)を含み、センサ(Ci)は、システムによって記録されたデータに基づいて、機械的応力による部品(7、8、P、P’、9a、6’)の疲労の推定値を計算できるようにするために、異なる応力閾値(S(Ci))を検出するようになっている。こうして、部品のオーバーホールを最適化することが可能である。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、たとえば飛行機などの航空機の機械部品の疲労を測定するシステムおよび方法、ならびに航空機のメンテナンス方法に関する。
【背景技術】
【0002】
安全規則では航空会社が稼働する航空機の部品の疲労を監視することを要求しており、これらの部品は、多くの機械的応力(または負荷)に曝されている。したがって部品は、定期的および反復的に、オーバーホール(またはメンテナンス)を受ける。
【0003】
たとえば、飛行機からターボジェットを懸架するための部品は、厳しい検査を受ける。サスペンションの各オーバーホールは、試験を実行するために、飛行機の稼働を停止させてサスペンションを取り外す必要性を生じる。オーバーホールの頻度は事前に決められており、オーバーホールは、部品の疲労の実態とは関係なく、各所定期間(たとえば2600飛行サイクル(離陸−飛行−着陸)ごと)の満了時に、計画的に実行される。修理または交換などの介入を必要とする疲労の状態の発現後かなり経過してからオーバーホールを実行するリスクを負わないように、この期間は、たとえこのリスクが統計的に最小限のままであるとしても、それを超えると部品が破損するリスクのある最短期間として(計算によってまたは経験的に)選択されなければならない。したがって、この最短期間は偶発的な応力に曝された部品の状態に対応する;したがって、今まで偶発的な応力に曝されていなかったのでより長期間にわたって安全に使用されることができたはずの部品にも、多くのオーバーホールが実行される。最後に、部品が曝されてきた実際の応力が分析されないままで、その損傷の可能性に関していつも最悪のシナリオが採用され、その結果、しばしば尚早なオーバーホールを招く。
【0004】
さらに、そして安全のため、破損のリスクが特定の閾値を超える期間にわたる使用期間を部品が達成しないように、実際に可能であるよりも短い期間部品が使用される。ここでも、部品の実際の使用状態が分析されないままで、最悪のシナリオに対応する基準が選択され、このため航空分野では従来、部品はその疲労実態に関わらず、その理論上の使用寿命の途中で交換される。したがって、部品の最終的な有効採算性(部品の理論的能力に対するその有効使用期間の比率)は50%程度であり、これは改善されることが望ましいだろう。
【0005】
さらに、頻繁なオーバーホール(飛行機からサスペンションを取り外し、その後推測的に異なる飛行機に再取り付けする必要が生じる)および飛行機の様々な部品の異なる使用寿命のため、サスペンションの使用寿命の監視は複雑である。特に、金属サスペンションに刻み込まれたシリアルナンバーが、時間とともに摩耗する可能性がある;この場合、その履歴を参照することができないので、リスクを冒さないために、その使用期間の推定は、たとえばこのサスペンションがこのタイプのサスペンションを装着した最初の飛行機に取り付けられ、それ以来連続的に飛行していることを考慮にいれて、最も悲観的な前提に基づいてなされなければならない;実際には、サスペンションが非常に早期に交換されることになるように、部品の使用はこの悲観的な非現実的前提よりも短い。
【0006】
さらに、現在はサスペンションの疲労の間接的な表示が存在するものの、これらは推定に過ぎず、不確かな情報しか提供できない。このため、サスペンションの疲労状態を推定するために、飛行機が硬着陸などの例外的応力に曝されたか否かを判断する飛行機の慣性装置によって測定されたデータが、使用される場合もある;したがって、慣性装置から部品への負荷移動の計算が、実行される。とは言うものの、硬着陸はサスペンションに対して例外的な負荷を本当に印加する可能性があるとはいえ、これは体系的に該当するものではなく、たとえば力が吸収されてサスペンションに伝わっていないので、着陸が実際にサスペンションに応力を与えていないときでも、人はサスペンションをオーバーホールするように促されるかも知れない。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】仏国特許出願公開第2,923,540号明細書
【発明の概要】
【発明が解決しようとする課題】
【0008】
先行技術は、オーバーホールを予測するための疲労の測定の問題を本当に解決してはいない;これはむしろ、たとえば本出願人による仏国特許出願公開第2,923,540号明細書に記載されるように、部品の破損の検出に焦点を当てている。
【0009】
本発明の目的は、これらの欠点を軽減すること、およびオーバーホールの適切性を改善して使用を最適化するために、航空機の機械部品の疲労をより測定しやすくすることである。
【課題を解決するための手段】
【0010】
本発明は、飛行機からのターボジェットのサスペンションに特に適用され、これらのサスペンションを形成する部品は、相当数の応力に曝される。とは言うものの、出願人は、その権利範囲を本願に限定する意図はなく、本発明は、応力に曝される航空機のいずれの部品においても、より一般的に適用され、利益を得る。
【0011】
本発明は、機械的応力に曝される航空機部品の疲労を測定するシステムに関し、システムは部品に実装された複数の応力センサを含み、各センサは、所定の機械的応力閾値を検出してこの閾値の突破を表すデータ信号を配信するために配置され、システムはこれらのデータを記録する手段を含み、センサは、システムによって記録されたデータに基づいて、機械的応力による部品の疲労の推定値を計算できるようにするために、異なる応力閾値を検出するために配置されている。
【0012】
システムによって記録されたデータは、好ましくは各閾値を破る発生回数である。
【0013】
したがって、部品が曝されてきた応力に関連づけられた部品の実際の疲労の良好な推測を得ることができる。何らかの方法で、センサは様々な閾値を超える応力の発生回数を「計数」することができ、これらの発生は部品に対する結果的な損傷(すなわち疲労)をそこから差し引くことを可能にするシステムによって、記録される。全ての応力は増加的に分解され、センサの各閾値が1増分を形成する。
【0014】
したがって、部品の使用を最適化することが可能である。特に、その疲労の知識に基づいて、部品のオーバーホールの適切性を判断することが可能であり、この選択は、部品が実際に被った疲労に基づいてなされ、(これらが通常使用の応力であれ、偶発的応力であれ、例外的応力であれ)実際に吸収された応力とは無関係に、全ての部品に適用される一般統計に対応してなされるものではない。
【0015】
システムによって記録されたデータはまた、所定期間経過後にその疲労実態とは無関係に部品が廃棄される先行技術とは異なり、その実際の損傷が正当と見なす場合にのみ、部品を交換することも可能にする。
【0016】
システムによって記録されたデータに基づいて部品の寸法決定を改善するために、本発明によるシステムを試験航空機に装着することが、さらに可能である。本発明により、部品の認証のために航空機製造者によって提供された値を確認することも、可能である;特に、本発明の方法によって複素疲労スペクトルが決定された場合には、このスペクトルは、航空機製造者によって提供されたスペクトルと比較されることが可能である。
【0017】
部品のシリアルナンバーが摩耗した場合には、その疲労の推測によってその有効使用期間を見積もることが可能であることは、特筆すべきである。さらに、そして特に、部品が曝されてきた非例外的応力の数は、その使用期間の良好な近似値を提供する。
【0018】
1つの応力閾値から別の応力閾値への増分(すなわち、連続する閾値を隔てる間隔)は、一定または変更可能であってもよい。これは、特定の応力の範囲に対するセンサの数を集中させることを可能にする。
【0019】
特定の一実施形態によれば、システムは、データ記録手段を含む処理装置、およびデータを処理装置に送信する手段を含むセンサを、含む。
【0020】
処理装置は、データに基づいて、機械的応力による部品の疲労の推定値を計算できるようにするデータを分析する手段を、含んでもよい。
【0021】
別の実施形態によれば、各センサはデータ記録手段を含む。
【0022】
好ましくは、システム(具体的には選択される実施形態に応じて処理装置またはセンサ)は、部品の疲労の推定値を計算するために配置された、データを−好ましくは要求に応えて−これらのデータを分析する遠隔手段に送信する手段を、含む。これらの遠隔手段はたとえば、作業者によって保持される携帯機器を含んでもよい;したがって携帯機器は、部品の疲労状態を確認するために、作業者の機器上でシステムからのデータを受信するだけで十分である。
【0023】
好適な実施形態によれば、センサは機械的変形センサである。
【0024】
好適な実施形態によれば、センサはMEMSタイプである。
【0025】
MEMSという略語は、「微小電気機械(microelectromechanical)システム」を意味する。慣習的に、当業者はこれらのマイクロシステムをMEMSの略語で呼び、したがって以下の記載においてこれが使用される。これらは、チップ上に、(1ミリメートルまたは1マイクロメートル程度の)極小スケールで、電子的計算部材のみならず、計算部材にデータを供給し、あるいはこれらによって制御される、機械的部材も組み込むシステムである。これらの機械的および電子的部材は、特定の機能、本例においては、機械的応力のデータを捕捉する少なくとも1つの機能およびデータを記録および/またはデータを送信する機能を実現するために、使用される。したがって、MEMSタイプのシステムは、微小電子的および微小機械的部材を含む。これらは通常、電子的部材には集積回路を用いて、そして機械的部材には微小機械加工を用いて、製造される。
【0026】
MEMSタイプのシステムは小型化されているので、これらの空間的要求は低く、これは航空機の部品にとって有利である。この低空間要求の結果として、1つの同じ部品上に複数のセンサを提供し、ひいては測定の精度を向上させることが容易に可能となり、疲労の状態は、より多くの応力閾値に分解される。
【0027】
特定の一実施形態によれば、1つの同じ応力閾値を検出するために、少なくとも2つのセンサが配置される。こうして、1つのセンサが故障した場合でも、別のセンサが当該応力閾値を検出することができる。
【0028】
本発明は、金属部品に特に良好に適用され、その疲労は、これらに印加される機械的応力に対して特に敏感である。
【0029】
本発明はまた、機械的応力に曝される航空機部品の疲労を測定する方法にも関し、ここで:
応力閾値の突破が部品の所定点で測定され、閾値は点ごとに異なり、
各閾値を破る測定の発生回数が記録され、
この発生回数に基づいて、部品の疲労の推定値が計算される。
【0030】
このようなメンテナンス方法は、上述のシステムの全ての利点を提供する。
【0031】
好適な実施形態によれば:
各閾値について、総発生回数に基づいて、前記閾値の突破であって上限(higher)閾値未満の測定の発生回数が計算され、
各閾値について、前記計算発生数に対応するこれらの閾値の間の多くの応力の印加に対応する部品の相当疲労が計算され、
計算された相当疲労は、部品の総疲労を得るために加算される。
【0032】
好適な実施形態によれば、方法は、先に説明されたシステムを用いて適用される。
【0033】
本発明はまた、機械的応力に曝される少なくとも1つの部品、および先に説明されたシステムに準じて疲労を測定するシステムを含む、航空機メンテナンス方法にも関し、ここで:
システムによって記録されたデータを送信する要求がシステムに送信され、
データが受信され、
これらのデータに基づいて、機械的応力による部品の疲労の推定値が計算される。
【0034】
このようなメンテナンス方法は、上述のシステムの全ての利点を提供する。具体的には、部品の疲労を確認するためにシステムによって記録されたデータを受信すれば十分なので、部品を取り外さずにオーバーホールの適切性に関する判断をすることを可能にする。
【0035】
好適な実施形態によれば、携帯用送受信器によって、無線で要求が送信されてデータが受信される。
【0036】
携帯機器の使用は特に簡単であり、ユーザが航空機のそばに立って、とりわけ部品のオーバーホールを制御するために単純に要求を送信しデータを受信することを、可能にする。
【0037】
特に、異なる部品に実装された疲労を測定するいくつかのシステムから生成されたデータの受信に、1つの同じ携帯機器が使用され得るようにすることが、可能である。したがって、これらの部品全体のオーバーホールを制御することが、可能である。
【0038】
好適な実施形態によれば、この場合、携帯機器は、部品の疲労の推定値を計算できるようにする、処理手段を含む。
【0039】
本発明は、以下の添付図面を参照して、本発明のシステムおよび方法の好適な実施形態の以下の説明を用いて、より良く理解されるだろう。
【図面の簡単な説明】
【0040】
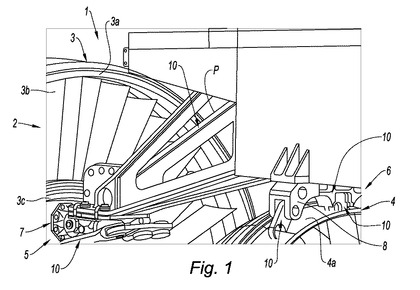
【図1】第一のタイプのサスペンションによって航空機の構造から懸架されているターボジェットの、下流から見た、模式的斜視図である。
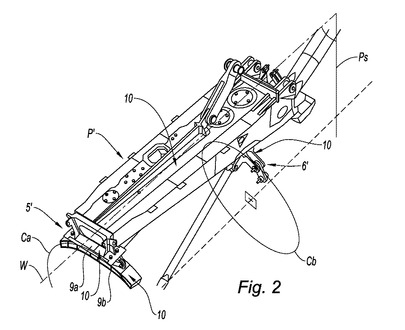
【図2】ターボジェット上で使用可能な第二のタイプのサスペンションの、上流から見た、模式的斜視図である。
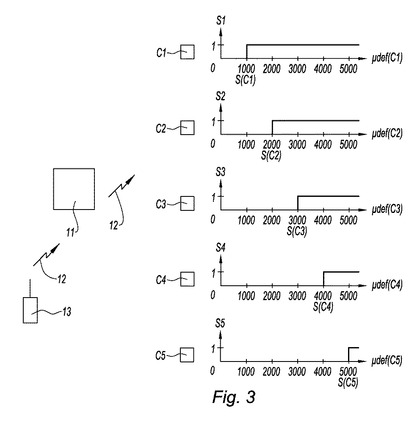
【図3】機械的応力に対するセンサの応答を支配する法則を表す、本発明のシステムの模式図である。
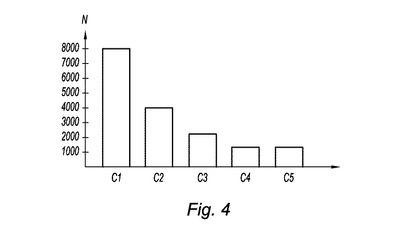
【図4】所定期間中に本発明のシステムのセンサによって記録されたデータを表すヒストグラムである。
【発明を実施するための形態】
【0041】
図1を参照すると、当業者にとって周知の方式で、ターボジェット1は、それによって外気がターボジェット内に吸入されるファン2、および高圧圧縮機の上流の低圧圧縮機を含み、これらの圧縮機は、空気を圧縮するために配置されており、出口において圧縮空気は、やはり圧縮された燃料を用いてこれが燃焼される燃焼室まで案内される;既燃ガスは、高圧タービンの後、出口においてこれらが排気ノズルを通じてターボジェットから放出される、低圧タービンまで案内される。
【0042】
ターボジェットの様々な部分が、ケーシングに収容されている。図1に示されるターボジェット1は特に、上流に、ファンケーシングおよび中間ケーシングと呼ばれるケーシング3を含み、下流に排気ケーシング4を含む。中間ケーシング3および排気ケーシング4は、ターボジェット1の構造体の構造ケーシングである。
【0043】
中間ケーシング3は、上流転がり軸受によってターボジェット1の低圧および高圧スプールのロータ軸を支持するハブ3cに、半径方向アーム3bによって接続されている外部シュラウド3aを含む。同様に、排気ケーシング4は、低圧および高圧スプールのロータ軸の下流転がり軸受が実装されているハブを支持する、外部シュラウド4aを含む。
【0044】
エンジン1は、これが推進する、図示されない航空機の構造から、航空機の構造にそれ自体固定されているパイロンPまたはエンジン支柱Pにフロントサスペンション5およびリアサスペンション6の双方が取り付けられていることによって、懸架されている。
【0045】
フロントサスペンション5は、中間ケーシング3の適合取り付け筐体に受容されているスナウト7を含むタイプである。リアサスペンション6は、排気ケーシング4に直接取り付けられたビーム8を含む。このようなサスペンションは、当業者にとって周知であり、この記載の文脈において、これらについてより詳細に記載する必要はない。
【0046】
航空機からターボジェットを懸架する装置の特定の部品に、疲労を測定するシステム10が配置されている。より正確には、システムは、部品が曝される応力による疲労を測定できることが望ましい、これらの部品の各々に配置される。各測定システムは、その部品上に配置されたn個のセンサCi(i=1〜n)を含む。
【0047】
図1の例において、測定システム10は、フロントサスペンション5のスナウト7に設けられ、リアサスペンション6のビーム8に、リアサスペンション6のビーム8を中間ケーシング4aおよびパイロンPに接続する各連接棒に、設けられている。
【0048】
図2には、第二のタイプのサスペンションによるターボジェットのサスペンションに包含され、本発明による疲労を測定するシステム10をそこに提供することが可能な、特定の要素が示されている。図2は、このようなターボジェットのたった1つのビームP’、フロントサスペンション5’、およびリアサスペンション6’を示しており、これらの要素は単独で示されているが、しかしその状況において、2つの円Ca、Cbのみが、サスペンション5’、6’が実装されるターボジェットのケーシングを模式的に示すために描かれている。フロントサスペンション5’は、当業者によって一般的に「ヨーク」と呼ばれ、それ自体が連接棒によってターボジェットの中間ケーシングに接続されている中間ビーム9bに、連接棒によって接続されている直線ビーム9aを含む;このタイプのサスペンションは、当該分野においてよく知られている。リアサスペンション6’に関しては、単一のビームを含む。
【0049】
上記のように、航空機からターボジェットを懸架する装置の特定部品の疲労を推定することができることが、望ましい。したがって、本発明による疲労を測定するシステム10は、たとえばパイロンP’上、フロントサスペンション5’のビーム9a上、フロントサスペンション5’の中間ビーム(ヨーク)9b上、およびリア・サスペンション・ビーム6’上など、疲労を監視することが望ましい部品の各々に、設けられる。サスペンション装置の特定の連接棒に測定システム10を設けることも、さらに可能である。
【0050】
図2と同様に図1において、システム10のみが参照されており、センサCiは、その寸法が非常に小さいので、図示されていない。
【0051】
最後に、本発明の疲労を測定するシステム10が、その簡素性のため、ターボジェットまたは航空機の多くの部品上に配置され得ることは、理解される。
【0052】
特定の一実施形態によれば、いくつかの異なる測定システム10が1つの同じエンジンに取り付けられ、各測定システム10は特に、エンジンの自由度の方向に印加される応力による疲労の測定に特化されている。エンジンは、通常は3つの垂直方向に並進およびこれらの方向を中心に回転する、6つの自由度を含む;これらの6つの自由度は、引張圧縮において作用する6つの連接棒によってモデリングされることが可能である;測定システム10のセンサは引張圧縮力を測定するので、各システム10は、連接棒にかかる応力による疲労を監視することができる。したがって、エンジンにいくつかのシステム10を設けることが可能であり、各システム10は1つの連接棒の疲労を測定する;特定の一実施形態によれば、1つのシステム10が各連接棒に設けられ、こうして全ての自由度が監視されることが可能となる。
【0053】
測定システム10のセンサCiは好ましくは、n個のセンサCi(i=1からn)の異なる位置が1つの同じタイプの変形および好ましくは引張および/または圧縮応力に曝される、部品の領域内に配置される。たとえば、システムが連接棒の疲労を測定するために配置される場合、センサCiは好ましくは、連接棒の中央部に配置される。
【0054】
部品が平面に対して対称的であり、疲労を測定するシステムがこの平面に対して垂直な応力による疲労を測定するためにその上に配置されている場合には、センサCiは、好ましくは片側から反対側に向かってセンサCiの閾値を交互に変化させることによって、対称面の両側に配置されることが可能であることは、特筆すべきである。このため、たとえば、図2に示されるパイロンP’は、ほぼ軸Wに沿って延在し、この軸Wを含む対象面Psに対して通常対称的であって、センサCiは平面Psの両側に分布することが可能であり、この平面Psの両側で連続する閾値を交互に変化させる。
【0055】
たとえば接合、ネジ留めによって、またはこれらを材料に直接埋め込むことによってなど、疲労を測定することが望ましい部品にセンサCiを固定するために、いくつかの方法を用いることが考えられる。センサCiが固定されている小さい板を部品にネジ留めすることも、可能である。
【0056】
本発明による疲労を測定するシステム10はここで、図3および図4を参照して、それ自体としておよびいずれかの部品を参照して、さらに詳細に記載される。
【0057】
システム10は複数nの応力センサCi、たとえば図3および図4のこの例においては5つのセンサC1、C2、C3、C4、C5を含む(n=5)。センサC1〜C5は、これが受ける機械的応力から生じる疲労を測定することが望ましい部品に、取り付けられる。
【0058】
本発明のシステム10の記載を容易にするために、センサに割り当てられた値は概念的であり、システムの動作を理解するだけのために設計されている。当業者はシステム(具体的にはセンサの数、これらが検出する応力閾値の値、および検出される閾値の数)を、特に使用される材料に応じて、作業者がシステム10に取り付ける部品に適合させるだろう。
【0059】
センサCiはこの例において変形センサであり、応力に応じた部品の変形が、「μdef」の記号で表されて当業者にとって周知の、「微小変形」と呼ばれる単位のない大きさで表される;この大きさは、周知の式μdef=ΔL/Lによる長さの単位に関連する伸長に対応する。たとえば、1mの長さの部品における1mmの伸長は、0.001/1=1.000μdefの変形に対応する。
【0060】
このように、材料が受けた応力の結果として、部品の変形が生じ、したがってμdefで表される(フックの法則を適用)。したがって変形センサは応力センサである。したがって、印加された圧力は変形から直接推定されるので、本記載の残りは、応力閾値または変形閾値の応力または変形の概念を区別せずに使用することは、容易に理解されるだろう。
【0061】
一例として以下に再現されるのは、図3のセンサの変形閾値(以下により詳細に紹介される)と、鋼(またはインコネルまたは「INCO」)およびチタンの関連応力との間のおおよそのマッピングである;与えられた変形に関連づけられた応力(およびその逆)がこれら2つのタイプの材料について同じではないことは、明らかである。
【表1】
【0062】
各センサC1〜C5は、機械的応力の所定レベルまたは閾値を検出するために、およびこの閾値が破られた場合にデータ信号(この場合にはビット)を配信するために、配置されている。言い換えると、センサC1〜C5は各々が所定閾値応力のセンサであり、各センサは、この閾値応力よりも大きい応力の発生回数を計数することを可能にする。
【0063】
システム10のセンサC1〜C5の各々の反対側で、図3に示されているのは、応力に応じてセンサCiによって配信される信号Si(i=1から5)、すなわちこれが受ける変形μdef(Ci)(i=1から5)、を表す図である。先に説明されたように、各センサCi(i=1から5)は、これが受ける変形に応じた信号Siを配信する:
変形μdef(Ci)がセンサCiを起動する閾値を下回る場合には、Si=0(この例において信号の不存在に対応)、そして
変形μdef(Ci)がセンサCiを起動する閾値を超える場合には、Si=1(1ビットに対応)。
【0064】
この例において、図3よりわかるように:
第一センサC1は、S(C1)=1000μdefに等しい起動閾値を有し;
第二センサC2は、S(C2)=2000μdefに等しい起動閾値を有し;
第三センサC3は、S(C3)=3000μdefに等しい起動閾値を有し;
第四センサC4は、S(C4)=4000μdefに等しい起動閾値を有し;
第五センサC5は、S(C5)=5000μdefに等しい起動閾値を有する。
【0065】
センサCiが取り付けられる部品が変形を受けるとき、各センサCiは実質的にこの同じ変形を受ける。これが受ける変形が起動閾値を下回る場合には、センサは信号を送信しない;変形がその起動閾値を超える場合にはセンサは信号(ビット)を送信する。さらに、記載される実施形態において、長期間の負荷の場合にも、センサCiは1ビットしか送信しない;センサCiは、応力レベルがその閾値S(Ci)を再び超える前にそれより下に戻る場合にのみ、新たなビットを送信する。
【0066】
一例として、部品が3300μdefに等しい変形を受ける場合を考えてみよう;この場合、センサC1、C2、およびC3はビットを送信するが、センサC4およびC5は送信しない。
【0067】
これらが設けられる航空機の使用中のセンサC1〜C5のデータ(すなわち、これらが各々送信したビットの数)は、測定システム10の処理装置11のメモリに記録および保存され、この処理装置11は、たとえば、センサC1〜C5が取り付けられている領域の近くに取り付けられ、図3に模式的に示されるように、電波12によってこれらと通信することが、可能である。より正確には、ビットを送信するときに、センサCiは電波12によってデータ信号を処理装置11に送信し、この信号はセンサCiの識別情報を含んでいる;処理装置11はその後、当該センサCiのカウンタを増加させることができる。センサデータの電子記録は周知の手法であり、ここでは詳細に記載する必要はない;これは伝統的に使用されているだろう。処理装置11は、「全自動デジタルエンジン制御(Full Authority Digital Engine Control)」を意味するFADECの略語で知られる、ターボジェットのコンピュータに含まれてもよい。ここではセンサCiと処理装置11との間の電波(高周波または低周波)によるデータ通信が記載されるが、しかしプロトコルに関わらず、有線または無線の、その他いずれの通信手段も考えられることは、言うまでもない。
【0068】
あるいは、センサCiからのデータは、センサ内に直接配置されている手段に、直接記録されることも可能である。
【0069】
データ記録手段に関わらず、使用期間の後に、システムは、各センサC1〜C5の各々が受けてきた、それぞれの閾値よりも高い変形の数に関するデータを含む。
【0070】
図4は、所定期間中に(たとえば、センサC1〜C5が取り付けられた部品が使用のため取り付けられたときから)システム10のセンサによって記録されたデータを表すヒストグラムを示す。このヒストグラムは、x軸において、当該センサC1〜C5を表し、y軸において、所定期間中に各センサが送信した1に等しい信号の数Nを表す。
【0071】
これは、第一センサC1は8000ビット(その起動閾値1000μdefよりも高い変形を8000回受けたことを意味する)を送信し、第二センサC2は4000ビット(その起動閾値2000μdefよりも高い変形を4000回受けたことを意味する)を送信し、第三センサC3は2000ビットを送信し、第四センサC4は1000ビットを送信し、第五センサC5は1000ビットを送信したことを、示している。
【0072】
センサC1〜C5によって記録されたデータより、部品が受けてきた総損傷DTOTAL、したがってその疲労(疲労は損傷に対応)を、計算することが可能である。
【0073】
一般的な(そして周知の)方式で、所定の応力A(または変形A)に曝された部品により受けた損傷Dは、以下の式(マイナーの式)によって定義される:
D=n(A)/N(A)
ここで、n(A)は応力(変形)Aの印加をもたらす事象の発生回数(周期)を表し、
N(A)は、破損するまでに部品が耐えられる応力(変形)Aの印加をもたらす事象の発生回数(周期)を表す(この値は従来、ヴェーラー(Woehler)曲線と呼ばれる曲線によって決定される)。
【0074】
このため、損傷Dが1に等しいとき、部品は破損する;損傷が0に等しいとき、部品は全く損傷しない。
【0075】
各センサCiによって送信される信号の数は、それが受けた疲労を表すが、これは、部品が曝されてきた様々な変形の発生回数の関数だからである。センサCiによって記録されたデータから、センサCiごとの相当損傷Diを推定することが可能である;この相当損傷Diは、センサCiの閾値S(Ci)よりも高いが上限閾値S(Ci+1)よりも低い応力の印加から生じる損傷に対応する。
【0076】
疲労の法則は、そこに印加される全ての応力から生じる部品の総損傷DTOTALが、線形に分解されて各範囲の応力の相当損傷の合計になることが可能であることを、教示している。言い換えると全ての応力がセンサCiの連続する閾値の間の間隔に対応する応力の範囲に分割された場合、部品の損傷DTOTALの良好な近似値は、各応力範囲の相当損傷Diの合計によって得られ、すなわち
【数1】
となる。
【0077】
DTOTALを計算するために、このセンサCiの閾値S(Ci)と上限閾値S(Ci+1)との間に含まれる応力の発生回数n(Ci)が、センサCi(i=1から5)によって記録されたデータから、各センサCiについて計算される。センサCiの相当損傷Diがその後この数n(Ci)に基づいて、当該応力の範囲を表す1つ以上の応力にこれを適用することによって、計算されることが可能である。応力の範囲における応力の正確な分布を知らなくても、この例において近似値を求めることは可能である;いくつかのソリューションが考えられる:
2つの閾値の間の変形の平均値(μdef(average)=(S(Ci)+S(Ci+1))/2)を使用すること、および結果的に生じる損傷Diがこの平均変形μdef(average)の発生回数n(Ci)から生じるものであると考えることが、可能である;
閾値の間に適用されるべき加重平均を決定するために統計的分析を実行すること、およびこの加重平均を使用することが、可能である;
安全のため、応力範囲の上限(S(Ci+1))を取ること、および相当損傷Diがこの上限S(Ci+1))に対応する変形の発生回数n(Ci)に対応すると考えること(いわゆる「控えめな」前提)が、可能である。
【0078】
その他の近似値も可能である。本発明の好適な実施形態において、飛行における安全に関する最も要求の厳しい基準を満たすために、最終近似(控えめな仮定)が選択される。したがって、計算された変形Diは実際の変形よりも大きい。
【0079】
センサCiによって計数された発生回数n(Ci)を決定するために、センサCiのビットの合計N(Ci)から、このセンサCiの閾値S(Ci)に対する上限閾値S(Ci+1)よりの高い応力に対応する全ての信号を減じる必要がある。
【0080】
したがって、全ての発生回数n(Ci)を決定するために、我々は、最も高い閾値を有するセンサC5から始める。
【0081】
したがって、たとえば図4において:
n(C5)=N(C5)=1000なので、センサC5はその閾値S(C5)=5000μdefよりも高い応力を1000回計数した;
n(C4)=N(C4)−N(C5)=0なので、センサC4は、その閾値S(C4)=4000μdefと上限閾値S(C5)との間の応力を計数しなかった(具体的には、カウンタC4の全てのビットはS(C5)よりも高い応力に対応するので、これらは既にセンサC5によって計数済みである);
n(C3)=N(C3)−N(C4)=2000−1000=1000なので、センサ3は、その閾値S(C3)=3000μdefと上限閾値S(C4)との間の応力を1000回計数した;
n(C2)=N(C2)−N(C3)=4000−2000=2000なので、センサC2は、その閾値S(C2)=2000μdefと上限閾値S(C3)との間の応力を2000回計数した;
n(C1)=N(C1)−N(C2)=8000−4000=4000なので、センサ1は、その閾値S(C1)=1000μdefと上限閾値S(C2)との間の応力を4000回計数した。
【0082】
上記で計算されたn(Ci)の各々について、N(S(Ci+1))であるところの部品の相当損傷Di(Di=n(Ci)/N(S(Ci+1)))は、部品の破損を招く上限閾値S(Ci+1)の変形に対応する応力の発生回数である(上記の近似値参照)。
【0083】
最後に、先に説明されたように、部品が被る総損傷DTOTALは、各範囲の応力に対応する損傷の合計に等しく、すなわちn個のセンサについて
【数2】
である。
【0084】
一例として、5つのセンサを備えるシステムが説明されてきた。これはより多くのまたは少ないセンサを含んでもよく、より一般的はn個のセンサを含んでもよいことは、言うまでもない。したがって、上記の様々な式は、i=1からnについて使用される。
【0085】
再び、そしてより総合的な方式で、n個のセンサに対する本発明の方法の好適な実施形態の適用が、説明される。方法はこの場合、以下のステップを含む:
1)n個のセンサCiは、それらの閾値S(Ci)よりも高い応力の発生回数N(Ci)を測定し;
2)これらのデータN(Ci)は時間tにわたって記録され;
3)各センサCiについて、全発生回数N(Ci)(i=1からn)に基づいて、センサCiの閾値S(Ci)と上限閾値S(Ci+1)との間の応力に対応する発生回数n(Ci)が以下の式にしたがって計算され;
n(Cn)=N(Cn);
i<nの場合、n(Ci)=N(Ci)−N(Ci+1);
4)各センサCiについて、センサCiの閾値S(Ci)と上限閾値S(Ci+1)との間の応力の範囲に対応する部品の相当損傷Diが計算され;
5)部品の総損傷DTOTALが以下の式にしたがって計算される;
【数3】
【0086】
言い換えると、本発明のシステムおよび方法により、増分センサCi(i=1からn)が取り付けられ、各センサは応力閾値S(Ci)(およびしたがって連続する応力のn個の範囲に分割された応力)に設定されている、部品について、各範囲の応力に対応する相当疲労(相当損傷Di)への分割に基づく総疲労(総損傷DTOTAL)を得ることを可能にする複素疲労スペクトルを、得ることができる。
【0087】
したがって、簡素化されたメンテナンス方法を適用することが可能である。
【0088】
たとえば、作業者は、センサCiによって記録されたデータを受信するための装置13を保有してもよい。図3に示されるシステムの例において、装置13は、システムの処理装置11と電波12によって通信するために配置されている;当然ながら、その他いずれかの形態の通信が提供されてもよい。
【0089】
当然ながら、システム10がセンサCiによって測定されたデータの記憶用の処理装置を含んでいない場合には、センサが記録したデータをそこに個別に送信するように、センサCiと直接通信するために装置13が配置されてもよい。
【0090】
装置13は、上述の方法により、記録されたデータ(センサCiのビットN(Ci)(i=1からn))に基づいて、部品の対応する損傷DTOTALを計算できるようにする、計算ソフトウェアプログラム(アルゴリズム)を備える処理装置を含む。
【0091】
したがって、作業者は自らの装置13を部品(たとえば飛行機のサスペンション)に近づけ、装置は、自動的にまたは命令にしたがって、センサCiによって記録されたデータをダウンロードし、サスペンションの損傷DTOTAL、すなわち疲労を計算し、これによって結果的に作業者が判断を下すことができるようになる。たとえば:
損傷DTOTALが0から0.3の間であれば、オーバーホールは不要であり;
損傷DTOTALが0.3から0.8の間であれば、オーバーホールは必要であり;
損傷DTOTALが0.8より大きければ、部品は交換されなければならない。
【0092】
さらに、分析は、作業者自身によってではなく、装置13によって自動的になされると、考えることが可能である。こうして、オーバーホールが必要ではない場合には、装置13は信号を発信せず(またはたとえば青信号を発信し)、オーバーホールが必要な場合には、装置13は音声信号を発信する(またはたとえば赤信号を発信する)。
【0093】
装置13によって収集された情報が、コンピュータサーバまたはこの情報を受信して処理するために配置されたその他いずれかの装置に、自動的にまたは作業者の要求に応じて、送信されると考えることも可能である。
【0094】
ユーザの希望に応じて、その他いずれの操作も考えられる。具体的には、部品の疲労の監視は、特定レベルの疲労を超過したときに第三者(飛行機のパイロット、その製造者、その作業者、コンピュータサーバ、またはその他の要素など)に自動的に警告する処理装置11(たとえばFADEC)によって、自動的に実行されると、考えることが可能である。
【0095】
最後に、本発明のシステム10は、部品が曝される応力を計数し、結果的に複素疲労スペクトルを構成することを、可能にする。システム10はまた、部品の使用期間中の事象履歴を正確に捕捉することも、可能にする。低振幅閾値を有するセンサは、より具体的には部品の通常使用に関する、すなわちそれが初めて使用されたときからの有効使用期間に関する情報を、提供する。高振幅閾値を有するセンサは、より具体的には、たとえば硬着陸などの部品が曝されてきた例外的応力に関する情報を、提供する。このためシステムは、部品のエンドユーザにとって、良好なメンテナンスツールである。
【0096】
特定の一実施形態によれば、センサが一定間隔でビットを配信させるクロックを含むことが考えられるが、このビットは、センサがその閾値を破る応力に曝されていないときには0に等しく、センサがその閾値を破る応力に曝されているときには1に等しい。これは、デジタルセンサを用いれば可能であろう。
【0097】
好適な実施形態において、その閾値より高い応力による励起の場合にのみ信号を配信する機械的センサを使用することが、好ましい;このような機械的センサは、使用のみならずエネルギーの供給も簡単であるという利点を有する。
【0098】
システム10は正の変形(μdefが正の値のみを取る)に関して説明されてきたことに注目してほしい。別の実施形態によれば、システムは、正の閾値(μdef>0)を取るセンサ、および/または負の閾値(μdef<0)を取るセンサを含んでもよく、これは、たとえば1つの方向(引張)および別の方向(圧縮)の応力を計数することを、可能にする。
【0099】
同じ応力閾値を有するいくつかのセンサ(少なくとも2つ)を提供することが可能であることも、特筆すべきである。これは、これらセンサの1つが故障したときに、別のものがまだこの閾値に対応する応力の発生回数を計数できるようにする。ちなみに、1つの閾値に関する(その)または全てのセンサが故障した場合には、故障した場合の閾値のセンサの応力が低閾値のセンサによって計数されることになるので、複数のセンサの存在によって誤差を最小化することができることも、特筆すべきである。
【0100】
当然ながら、センサの数が多いほど、連続する閾値の間の増分がより小さいため、そのうちのいくつかが故障した場合において安全性がより高くなり、また総疲労の計算がより正確になる。増分は、全て同一であってもよく、あるいは漸進的であってもよい;増分の漸進の値は、最も一般的な応力範囲においてより正確な測定値、および(いずれにせよ非常に高い応力を発生する)例外的応力についてより不正確な測定値を有することができるものである。好ましくは、それが受ける損傷の判定にとって望ましい精度に応じて、2個から50個のセンサが1つの部品に配置される。
【0101】
たとえば、最小検出変形は1000μdef(第一センサC1の閾値)に等しくてもよく、最大検出変形は、200μdefに等しい連続する閾値の間の間隔をもって、5000μdef(最後のセンサCnの閾値)に等しくてもよい(この場合、閾値がそれぞれ1000、1200、1400、...、5000に等しい、21個のセンサが設けられている)。
【0102】
本発明のシステム10は、部品上に配置されるものとして説明されてきたが、しかしこれは、複数の部品からなる構造体に配置され、アセンブリの疲労が監視されるようにしてもよい。
【0103】
航空用途において、センサは好ましくは、−55℃から600℃(特にターボジェットサスペンションの場合)の範囲の温度に耐えられるべきであり、油および燃料の飛沫に耐えられるべきである。これらはまた好ましくは、腐食および汚染、特に水、塩、砂、およびスラッジの噴霧に関わるものにも、耐えられるべきである。さらに、有利なことにこれらは、浸透検査などの非破壊検査、渦電流、X線などの印加にも耐えられるべきである。好ましくはこれらは、様々な波長(無線、可聴など)との電磁適合性を有するべきである。センサはまた、数十キロヘルツ程度であってもよいターボジェットの機械的振動、特にターボジェットの回転部品の回転によるもの(低圧スプールで1分あたり0から5500回転、および高圧スプールで1分あたり0から20,000回転)にも耐えることができ、数十から数万G(9.81m.s−2)の衝撃に耐えられるべきである。好ましくはこれらはまた、様々なタイプの負荷の下での静的および準静的たわみにも耐えるべきである。
【0104】
センサはまた、部品の使用寿命を通じてその疲労状態を監視するように設計されているので、少なくともこれらが取り付けられることが意図されている部品と同じ使用寿命を有するべきである。たとえば、その使用寿命は、60年、または70,000または80,000飛行サイクル(離陸−飛行−着陸)より長くてもよい。
【0105】
好ましくは、センサは、その閾値を超える応力の発生回数109回超を持ちこたえることができる。それらの使用およびそれらに対する動的負荷の印加を通じて、センサは好ましくは、それらの動作において悪影響を受けてはならない。
【0106】
好ましくは、センサの電源は、航空機の電源から独立している。
【0107】
本発明のシステムは、ターボジェットサスペンション装置、特にこれらの装置の連接棒、そのビーム、あるいはその他のパイロンにとって、特に有利である。本発明のシステムはまた、飛行機の着陸装置上に、または制動棒上に、有利に配置されてもよい。一般的に、これは装着可能な(すなわちその上にセンサを取り付けることが可能な)、そしてその使用が複素疲労スペクトルの取得を正当化する様々な応力を発生させる、いずれの部品上にも配置されてよい;これはとりわけ、ターボジェットの様々な連接棒およびシャックルの場合である。
【0108】
本発明のセンサは、たとえば(少ない発生回数で破損が発生し、明白な塑性変形が先行する、高応力下の)オリゴサイクリック疲労の各領域、疲労の各領域(または応力が減少するとき増大するいくつかのサイクル後に破損が見込まれる場合の制限的持久)、および無制限持久の各領域のために、ヴェーラー曲線において従来指定された応力の下の様々なタイプの疲労を監視することを、可能にする;当然ながら、部品は通常この領域に対応する応力によって破損が発生し得る前に交換されるので、無制限持久の領域はあまり重要ではない。
【0109】
本発明の好適な実施形態によれば、システム10のセンサCiは、導入部で既に説明されたMEMSタイプの装置(またはセンサ)に取り付けられる。
【0110】
MEMSタイプの装置は、その小ささのため、応答時間が著しく短い微小機構を含み、これが非常に迅速な反応時間を装置に提供することを、特筆することが可能である。
【0111】
さらに、このような装置は、ターボジェットの部品に容易に収容されることができる。これらはまた電源内蔵式であってもよく、したがって自律的であり、これによって取り付けが容易になり、アセンブリの安全を保証する。MEMSタイプの装置の電源内蔵手段は、たとえばターボジェットの周囲エネルギーを電気エネルギーに変換するように配置された手段(たとえば周囲ガスを用いて電力を発生して装置に動力供給するマイクロタービン)からなってもよい。さらに、MEMSタイプの装置のセンサによって測定されたデータを処理する手段が、この同じ装置に設けられることも可能である。
【0112】
本発明は好適な実施形態を参照して記載されてきたが、その他の実施形態も考えられることは言うまでもない。具体的には、記載された様々な実施形態の特徴は、不適合性がなければ、ともに組み合わせられることが可能である。
【技術分野】
【0001】
本発明は、たとえば飛行機などの航空機の機械部品の疲労を測定するシステムおよび方法、ならびに航空機のメンテナンス方法に関する。
【背景技術】
【0002】
安全規則では航空会社が稼働する航空機の部品の疲労を監視することを要求しており、これらの部品は、多くの機械的応力(または負荷)に曝されている。したがって部品は、定期的および反復的に、オーバーホール(またはメンテナンス)を受ける。
【0003】
たとえば、飛行機からターボジェットを懸架するための部品は、厳しい検査を受ける。サスペンションの各オーバーホールは、試験を実行するために、飛行機の稼働を停止させてサスペンションを取り外す必要性を生じる。オーバーホールの頻度は事前に決められており、オーバーホールは、部品の疲労の実態とは関係なく、各所定期間(たとえば2600飛行サイクル(離陸−飛行−着陸)ごと)の満了時に、計画的に実行される。修理または交換などの介入を必要とする疲労の状態の発現後かなり経過してからオーバーホールを実行するリスクを負わないように、この期間は、たとえこのリスクが統計的に最小限のままであるとしても、それを超えると部品が破損するリスクのある最短期間として(計算によってまたは経験的に)選択されなければならない。したがって、この最短期間は偶発的な応力に曝された部品の状態に対応する;したがって、今まで偶発的な応力に曝されていなかったのでより長期間にわたって安全に使用されることができたはずの部品にも、多くのオーバーホールが実行される。最後に、部品が曝されてきた実際の応力が分析されないままで、その損傷の可能性に関していつも最悪のシナリオが採用され、その結果、しばしば尚早なオーバーホールを招く。
【0004】
さらに、そして安全のため、破損のリスクが特定の閾値を超える期間にわたる使用期間を部品が達成しないように、実際に可能であるよりも短い期間部品が使用される。ここでも、部品の実際の使用状態が分析されないままで、最悪のシナリオに対応する基準が選択され、このため航空分野では従来、部品はその疲労実態に関わらず、その理論上の使用寿命の途中で交換される。したがって、部品の最終的な有効採算性(部品の理論的能力に対するその有効使用期間の比率)は50%程度であり、これは改善されることが望ましいだろう。
【0005】
さらに、頻繁なオーバーホール(飛行機からサスペンションを取り外し、その後推測的に異なる飛行機に再取り付けする必要が生じる)および飛行機の様々な部品の異なる使用寿命のため、サスペンションの使用寿命の監視は複雑である。特に、金属サスペンションに刻み込まれたシリアルナンバーが、時間とともに摩耗する可能性がある;この場合、その履歴を参照することができないので、リスクを冒さないために、その使用期間の推定は、たとえばこのサスペンションがこのタイプのサスペンションを装着した最初の飛行機に取り付けられ、それ以来連続的に飛行していることを考慮にいれて、最も悲観的な前提に基づいてなされなければならない;実際には、サスペンションが非常に早期に交換されることになるように、部品の使用はこの悲観的な非現実的前提よりも短い。
【0006】
さらに、現在はサスペンションの疲労の間接的な表示が存在するものの、これらは推定に過ぎず、不確かな情報しか提供できない。このため、サスペンションの疲労状態を推定するために、飛行機が硬着陸などの例外的応力に曝されたか否かを判断する飛行機の慣性装置によって測定されたデータが、使用される場合もある;したがって、慣性装置から部品への負荷移動の計算が、実行される。とは言うものの、硬着陸はサスペンションに対して例外的な負荷を本当に印加する可能性があるとはいえ、これは体系的に該当するものではなく、たとえば力が吸収されてサスペンションに伝わっていないので、着陸が実際にサスペンションに応力を与えていないときでも、人はサスペンションをオーバーホールするように促されるかも知れない。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】仏国特許出願公開第2,923,540号明細書
【発明の概要】
【発明が解決しようとする課題】
【0008】
先行技術は、オーバーホールを予測するための疲労の測定の問題を本当に解決してはいない;これはむしろ、たとえば本出願人による仏国特許出願公開第2,923,540号明細書に記載されるように、部品の破損の検出に焦点を当てている。
【0009】
本発明の目的は、これらの欠点を軽減すること、およびオーバーホールの適切性を改善して使用を最適化するために、航空機の機械部品の疲労をより測定しやすくすることである。
【課題を解決するための手段】
【0010】
本発明は、飛行機からのターボジェットのサスペンションに特に適用され、これらのサスペンションを形成する部品は、相当数の応力に曝される。とは言うものの、出願人は、その権利範囲を本願に限定する意図はなく、本発明は、応力に曝される航空機のいずれの部品においても、より一般的に適用され、利益を得る。
【0011】
本発明は、機械的応力に曝される航空機部品の疲労を測定するシステムに関し、システムは部品に実装された複数の応力センサを含み、各センサは、所定の機械的応力閾値を検出してこの閾値の突破を表すデータ信号を配信するために配置され、システムはこれらのデータを記録する手段を含み、センサは、システムによって記録されたデータに基づいて、機械的応力による部品の疲労の推定値を計算できるようにするために、異なる応力閾値を検出するために配置されている。
【0012】
システムによって記録されたデータは、好ましくは各閾値を破る発生回数である。
【0013】
したがって、部品が曝されてきた応力に関連づけられた部品の実際の疲労の良好な推測を得ることができる。何らかの方法で、センサは様々な閾値を超える応力の発生回数を「計数」することができ、これらの発生は部品に対する結果的な損傷(すなわち疲労)をそこから差し引くことを可能にするシステムによって、記録される。全ての応力は増加的に分解され、センサの各閾値が1増分を形成する。
【0014】
したがって、部品の使用を最適化することが可能である。特に、その疲労の知識に基づいて、部品のオーバーホールの適切性を判断することが可能であり、この選択は、部品が実際に被った疲労に基づいてなされ、(これらが通常使用の応力であれ、偶発的応力であれ、例外的応力であれ)実際に吸収された応力とは無関係に、全ての部品に適用される一般統計に対応してなされるものではない。
【0015】
システムによって記録されたデータはまた、所定期間経過後にその疲労実態とは無関係に部品が廃棄される先行技術とは異なり、その実際の損傷が正当と見なす場合にのみ、部品を交換することも可能にする。
【0016】
システムによって記録されたデータに基づいて部品の寸法決定を改善するために、本発明によるシステムを試験航空機に装着することが、さらに可能である。本発明により、部品の認証のために航空機製造者によって提供された値を確認することも、可能である;特に、本発明の方法によって複素疲労スペクトルが決定された場合には、このスペクトルは、航空機製造者によって提供されたスペクトルと比較されることが可能である。
【0017】
部品のシリアルナンバーが摩耗した場合には、その疲労の推測によってその有効使用期間を見積もることが可能であることは、特筆すべきである。さらに、そして特に、部品が曝されてきた非例外的応力の数は、その使用期間の良好な近似値を提供する。
【0018】
1つの応力閾値から別の応力閾値への増分(すなわち、連続する閾値を隔てる間隔)は、一定または変更可能であってもよい。これは、特定の応力の範囲に対するセンサの数を集中させることを可能にする。
【0019】
特定の一実施形態によれば、システムは、データ記録手段を含む処理装置、およびデータを処理装置に送信する手段を含むセンサを、含む。
【0020】
処理装置は、データに基づいて、機械的応力による部品の疲労の推定値を計算できるようにするデータを分析する手段を、含んでもよい。
【0021】
別の実施形態によれば、各センサはデータ記録手段を含む。
【0022】
好ましくは、システム(具体的には選択される実施形態に応じて処理装置またはセンサ)は、部品の疲労の推定値を計算するために配置された、データを−好ましくは要求に応えて−これらのデータを分析する遠隔手段に送信する手段を、含む。これらの遠隔手段はたとえば、作業者によって保持される携帯機器を含んでもよい;したがって携帯機器は、部品の疲労状態を確認するために、作業者の機器上でシステムからのデータを受信するだけで十分である。
【0023】
好適な実施形態によれば、センサは機械的変形センサである。
【0024】
好適な実施形態によれば、センサはMEMSタイプである。
【0025】
MEMSという略語は、「微小電気機械(microelectromechanical)システム」を意味する。慣習的に、当業者はこれらのマイクロシステムをMEMSの略語で呼び、したがって以下の記載においてこれが使用される。これらは、チップ上に、(1ミリメートルまたは1マイクロメートル程度の)極小スケールで、電子的計算部材のみならず、計算部材にデータを供給し、あるいはこれらによって制御される、機械的部材も組み込むシステムである。これらの機械的および電子的部材は、特定の機能、本例においては、機械的応力のデータを捕捉する少なくとも1つの機能およびデータを記録および/またはデータを送信する機能を実現するために、使用される。したがって、MEMSタイプのシステムは、微小電子的および微小機械的部材を含む。これらは通常、電子的部材には集積回路を用いて、そして機械的部材には微小機械加工を用いて、製造される。
【0026】
MEMSタイプのシステムは小型化されているので、これらの空間的要求は低く、これは航空機の部品にとって有利である。この低空間要求の結果として、1つの同じ部品上に複数のセンサを提供し、ひいては測定の精度を向上させることが容易に可能となり、疲労の状態は、より多くの応力閾値に分解される。
【0027】
特定の一実施形態によれば、1つの同じ応力閾値を検出するために、少なくとも2つのセンサが配置される。こうして、1つのセンサが故障した場合でも、別のセンサが当該応力閾値を検出することができる。
【0028】
本発明は、金属部品に特に良好に適用され、その疲労は、これらに印加される機械的応力に対して特に敏感である。
【0029】
本発明はまた、機械的応力に曝される航空機部品の疲労を測定する方法にも関し、ここで:
応力閾値の突破が部品の所定点で測定され、閾値は点ごとに異なり、
各閾値を破る測定の発生回数が記録され、
この発生回数に基づいて、部品の疲労の推定値が計算される。
【0030】
このようなメンテナンス方法は、上述のシステムの全ての利点を提供する。
【0031】
好適な実施形態によれば:
各閾値について、総発生回数に基づいて、前記閾値の突破であって上限(higher)閾値未満の測定の発生回数が計算され、
各閾値について、前記計算発生数に対応するこれらの閾値の間の多くの応力の印加に対応する部品の相当疲労が計算され、
計算された相当疲労は、部品の総疲労を得るために加算される。
【0032】
好適な実施形態によれば、方法は、先に説明されたシステムを用いて適用される。
【0033】
本発明はまた、機械的応力に曝される少なくとも1つの部品、および先に説明されたシステムに準じて疲労を測定するシステムを含む、航空機メンテナンス方法にも関し、ここで:
システムによって記録されたデータを送信する要求がシステムに送信され、
データが受信され、
これらのデータに基づいて、機械的応力による部品の疲労の推定値が計算される。
【0034】
このようなメンテナンス方法は、上述のシステムの全ての利点を提供する。具体的には、部品の疲労を確認するためにシステムによって記録されたデータを受信すれば十分なので、部品を取り外さずにオーバーホールの適切性に関する判断をすることを可能にする。
【0035】
好適な実施形態によれば、携帯用送受信器によって、無線で要求が送信されてデータが受信される。
【0036】
携帯機器の使用は特に簡単であり、ユーザが航空機のそばに立って、とりわけ部品のオーバーホールを制御するために単純に要求を送信しデータを受信することを、可能にする。
【0037】
特に、異なる部品に実装された疲労を測定するいくつかのシステムから生成されたデータの受信に、1つの同じ携帯機器が使用され得るようにすることが、可能である。したがって、これらの部品全体のオーバーホールを制御することが、可能である。
【0038】
好適な実施形態によれば、この場合、携帯機器は、部品の疲労の推定値を計算できるようにする、処理手段を含む。
【0039】
本発明は、以下の添付図面を参照して、本発明のシステムおよび方法の好適な実施形態の以下の説明を用いて、より良く理解されるだろう。
【図面の簡単な説明】
【0040】
【図1】第一のタイプのサスペンションによって航空機の構造から懸架されているターボジェットの、下流から見た、模式的斜視図である。
【図2】ターボジェット上で使用可能な第二のタイプのサスペンションの、上流から見た、模式的斜視図である。
【図3】機械的応力に対するセンサの応答を支配する法則を表す、本発明のシステムの模式図である。
【図4】所定期間中に本発明のシステムのセンサによって記録されたデータを表すヒストグラムである。
【発明を実施するための形態】
【0041】
図1を参照すると、当業者にとって周知の方式で、ターボジェット1は、それによって外気がターボジェット内に吸入されるファン2、および高圧圧縮機の上流の低圧圧縮機を含み、これらの圧縮機は、空気を圧縮するために配置されており、出口において圧縮空気は、やはり圧縮された燃料を用いてこれが燃焼される燃焼室まで案内される;既燃ガスは、高圧タービンの後、出口においてこれらが排気ノズルを通じてターボジェットから放出される、低圧タービンまで案内される。
【0042】
ターボジェットの様々な部分が、ケーシングに収容されている。図1に示されるターボジェット1は特に、上流に、ファンケーシングおよび中間ケーシングと呼ばれるケーシング3を含み、下流に排気ケーシング4を含む。中間ケーシング3および排気ケーシング4は、ターボジェット1の構造体の構造ケーシングである。
【0043】
中間ケーシング3は、上流転がり軸受によってターボジェット1の低圧および高圧スプールのロータ軸を支持するハブ3cに、半径方向アーム3bによって接続されている外部シュラウド3aを含む。同様に、排気ケーシング4は、低圧および高圧スプールのロータ軸の下流転がり軸受が実装されているハブを支持する、外部シュラウド4aを含む。
【0044】
エンジン1は、これが推進する、図示されない航空機の構造から、航空機の構造にそれ自体固定されているパイロンPまたはエンジン支柱Pにフロントサスペンション5およびリアサスペンション6の双方が取り付けられていることによって、懸架されている。
【0045】
フロントサスペンション5は、中間ケーシング3の適合取り付け筐体に受容されているスナウト7を含むタイプである。リアサスペンション6は、排気ケーシング4に直接取り付けられたビーム8を含む。このようなサスペンションは、当業者にとって周知であり、この記載の文脈において、これらについてより詳細に記載する必要はない。
【0046】
航空機からターボジェットを懸架する装置の特定の部品に、疲労を測定するシステム10が配置されている。より正確には、システムは、部品が曝される応力による疲労を測定できることが望ましい、これらの部品の各々に配置される。各測定システムは、その部品上に配置されたn個のセンサCi(i=1〜n)を含む。
【0047】
図1の例において、測定システム10は、フロントサスペンション5のスナウト7に設けられ、リアサスペンション6のビーム8に、リアサスペンション6のビーム8を中間ケーシング4aおよびパイロンPに接続する各連接棒に、設けられている。
【0048】
図2には、第二のタイプのサスペンションによるターボジェットのサスペンションに包含され、本発明による疲労を測定するシステム10をそこに提供することが可能な、特定の要素が示されている。図2は、このようなターボジェットのたった1つのビームP’、フロントサスペンション5’、およびリアサスペンション6’を示しており、これらの要素は単独で示されているが、しかしその状況において、2つの円Ca、Cbのみが、サスペンション5’、6’が実装されるターボジェットのケーシングを模式的に示すために描かれている。フロントサスペンション5’は、当業者によって一般的に「ヨーク」と呼ばれ、それ自体が連接棒によってターボジェットの中間ケーシングに接続されている中間ビーム9bに、連接棒によって接続されている直線ビーム9aを含む;このタイプのサスペンションは、当該分野においてよく知られている。リアサスペンション6’に関しては、単一のビームを含む。
【0049】
上記のように、航空機からターボジェットを懸架する装置の特定部品の疲労を推定することができることが、望ましい。したがって、本発明による疲労を測定するシステム10は、たとえばパイロンP’上、フロントサスペンション5’のビーム9a上、フロントサスペンション5’の中間ビーム(ヨーク)9b上、およびリア・サスペンション・ビーム6’上など、疲労を監視することが望ましい部品の各々に、設けられる。サスペンション装置の特定の連接棒に測定システム10を設けることも、さらに可能である。
【0050】
図2と同様に図1において、システム10のみが参照されており、センサCiは、その寸法が非常に小さいので、図示されていない。
【0051】
最後に、本発明の疲労を測定するシステム10が、その簡素性のため、ターボジェットまたは航空機の多くの部品上に配置され得ることは、理解される。
【0052】
特定の一実施形態によれば、いくつかの異なる測定システム10が1つの同じエンジンに取り付けられ、各測定システム10は特に、エンジンの自由度の方向に印加される応力による疲労の測定に特化されている。エンジンは、通常は3つの垂直方向に並進およびこれらの方向を中心に回転する、6つの自由度を含む;これらの6つの自由度は、引張圧縮において作用する6つの連接棒によってモデリングされることが可能である;測定システム10のセンサは引張圧縮力を測定するので、各システム10は、連接棒にかかる応力による疲労を監視することができる。したがって、エンジンにいくつかのシステム10を設けることが可能であり、各システム10は1つの連接棒の疲労を測定する;特定の一実施形態によれば、1つのシステム10が各連接棒に設けられ、こうして全ての自由度が監視されることが可能となる。
【0053】
測定システム10のセンサCiは好ましくは、n個のセンサCi(i=1からn)の異なる位置が1つの同じタイプの変形および好ましくは引張および/または圧縮応力に曝される、部品の領域内に配置される。たとえば、システムが連接棒の疲労を測定するために配置される場合、センサCiは好ましくは、連接棒の中央部に配置される。
【0054】
部品が平面に対して対称的であり、疲労を測定するシステムがこの平面に対して垂直な応力による疲労を測定するためにその上に配置されている場合には、センサCiは、好ましくは片側から反対側に向かってセンサCiの閾値を交互に変化させることによって、対称面の両側に配置されることが可能であることは、特筆すべきである。このため、たとえば、図2に示されるパイロンP’は、ほぼ軸Wに沿って延在し、この軸Wを含む対象面Psに対して通常対称的であって、センサCiは平面Psの両側に分布することが可能であり、この平面Psの両側で連続する閾値を交互に変化させる。
【0055】
たとえば接合、ネジ留めによって、またはこれらを材料に直接埋め込むことによってなど、疲労を測定することが望ましい部品にセンサCiを固定するために、いくつかの方法を用いることが考えられる。センサCiが固定されている小さい板を部品にネジ留めすることも、可能である。
【0056】
本発明による疲労を測定するシステム10はここで、図3および図4を参照して、それ自体としておよびいずれかの部品を参照して、さらに詳細に記載される。
【0057】
システム10は複数nの応力センサCi、たとえば図3および図4のこの例においては5つのセンサC1、C2、C3、C4、C5を含む(n=5)。センサC1〜C5は、これが受ける機械的応力から生じる疲労を測定することが望ましい部品に、取り付けられる。
【0058】
本発明のシステム10の記載を容易にするために、センサに割り当てられた値は概念的であり、システムの動作を理解するだけのために設計されている。当業者はシステム(具体的にはセンサの数、これらが検出する応力閾値の値、および検出される閾値の数)を、特に使用される材料に応じて、作業者がシステム10に取り付ける部品に適合させるだろう。
【0059】
センサCiはこの例において変形センサであり、応力に応じた部品の変形が、「μdef」の記号で表されて当業者にとって周知の、「微小変形」と呼ばれる単位のない大きさで表される;この大きさは、周知の式μdef=ΔL/Lによる長さの単位に関連する伸長に対応する。たとえば、1mの長さの部品における1mmの伸長は、0.001/1=1.000μdefの変形に対応する。
【0060】
このように、材料が受けた応力の結果として、部品の変形が生じ、したがってμdefで表される(フックの法則を適用)。したがって変形センサは応力センサである。したがって、印加された圧力は変形から直接推定されるので、本記載の残りは、応力閾値または変形閾値の応力または変形の概念を区別せずに使用することは、容易に理解されるだろう。
【0061】
一例として以下に再現されるのは、図3のセンサの変形閾値(以下により詳細に紹介される)と、鋼(またはインコネルまたは「INCO」)およびチタンの関連応力との間のおおよそのマッピングである;与えられた変形に関連づけられた応力(およびその逆)がこれら2つのタイプの材料について同じではないことは、明らかである。
【表1】
【0062】
各センサC1〜C5は、機械的応力の所定レベルまたは閾値を検出するために、およびこの閾値が破られた場合にデータ信号(この場合にはビット)を配信するために、配置されている。言い換えると、センサC1〜C5は各々が所定閾値応力のセンサであり、各センサは、この閾値応力よりも大きい応力の発生回数を計数することを可能にする。
【0063】
システム10のセンサC1〜C5の各々の反対側で、図3に示されているのは、応力に応じてセンサCiによって配信される信号Si(i=1から5)、すなわちこれが受ける変形μdef(Ci)(i=1から5)、を表す図である。先に説明されたように、各センサCi(i=1から5)は、これが受ける変形に応じた信号Siを配信する:
変形μdef(Ci)がセンサCiを起動する閾値を下回る場合には、Si=0(この例において信号の不存在に対応)、そして
変形μdef(Ci)がセンサCiを起動する閾値を超える場合には、Si=1(1ビットに対応)。
【0064】
この例において、図3よりわかるように:
第一センサC1は、S(C1)=1000μdefに等しい起動閾値を有し;
第二センサC2は、S(C2)=2000μdefに等しい起動閾値を有し;
第三センサC3は、S(C3)=3000μdefに等しい起動閾値を有し;
第四センサC4は、S(C4)=4000μdefに等しい起動閾値を有し;
第五センサC5は、S(C5)=5000μdefに等しい起動閾値を有する。
【0065】
センサCiが取り付けられる部品が変形を受けるとき、各センサCiは実質的にこの同じ変形を受ける。これが受ける変形が起動閾値を下回る場合には、センサは信号を送信しない;変形がその起動閾値を超える場合にはセンサは信号(ビット)を送信する。さらに、記載される実施形態において、長期間の負荷の場合にも、センサCiは1ビットしか送信しない;センサCiは、応力レベルがその閾値S(Ci)を再び超える前にそれより下に戻る場合にのみ、新たなビットを送信する。
【0066】
一例として、部品が3300μdefに等しい変形を受ける場合を考えてみよう;この場合、センサC1、C2、およびC3はビットを送信するが、センサC4およびC5は送信しない。
【0067】
これらが設けられる航空機の使用中のセンサC1〜C5のデータ(すなわち、これらが各々送信したビットの数)は、測定システム10の処理装置11のメモリに記録および保存され、この処理装置11は、たとえば、センサC1〜C5が取り付けられている領域の近くに取り付けられ、図3に模式的に示されるように、電波12によってこれらと通信することが、可能である。より正確には、ビットを送信するときに、センサCiは電波12によってデータ信号を処理装置11に送信し、この信号はセンサCiの識別情報を含んでいる;処理装置11はその後、当該センサCiのカウンタを増加させることができる。センサデータの電子記録は周知の手法であり、ここでは詳細に記載する必要はない;これは伝統的に使用されているだろう。処理装置11は、「全自動デジタルエンジン制御(Full Authority Digital Engine Control)」を意味するFADECの略語で知られる、ターボジェットのコンピュータに含まれてもよい。ここではセンサCiと処理装置11との間の電波(高周波または低周波)によるデータ通信が記載されるが、しかしプロトコルに関わらず、有線または無線の、その他いずれの通信手段も考えられることは、言うまでもない。
【0068】
あるいは、センサCiからのデータは、センサ内に直接配置されている手段に、直接記録されることも可能である。
【0069】
データ記録手段に関わらず、使用期間の後に、システムは、各センサC1〜C5の各々が受けてきた、それぞれの閾値よりも高い変形の数に関するデータを含む。
【0070】
図4は、所定期間中に(たとえば、センサC1〜C5が取り付けられた部品が使用のため取り付けられたときから)システム10のセンサによって記録されたデータを表すヒストグラムを示す。このヒストグラムは、x軸において、当該センサC1〜C5を表し、y軸において、所定期間中に各センサが送信した1に等しい信号の数Nを表す。
【0071】
これは、第一センサC1は8000ビット(その起動閾値1000μdefよりも高い変形を8000回受けたことを意味する)を送信し、第二センサC2は4000ビット(その起動閾値2000μdefよりも高い変形を4000回受けたことを意味する)を送信し、第三センサC3は2000ビットを送信し、第四センサC4は1000ビットを送信し、第五センサC5は1000ビットを送信したことを、示している。
【0072】
センサC1〜C5によって記録されたデータより、部品が受けてきた総損傷DTOTAL、したがってその疲労(疲労は損傷に対応)を、計算することが可能である。
【0073】
一般的な(そして周知の)方式で、所定の応力A(または変形A)に曝された部品により受けた損傷Dは、以下の式(マイナーの式)によって定義される:
D=n(A)/N(A)
ここで、n(A)は応力(変形)Aの印加をもたらす事象の発生回数(周期)を表し、
N(A)は、破損するまでに部品が耐えられる応力(変形)Aの印加をもたらす事象の発生回数(周期)を表す(この値は従来、ヴェーラー(Woehler)曲線と呼ばれる曲線によって決定される)。
【0074】
このため、損傷Dが1に等しいとき、部品は破損する;損傷が0に等しいとき、部品は全く損傷しない。
【0075】
各センサCiによって送信される信号の数は、それが受けた疲労を表すが、これは、部品が曝されてきた様々な変形の発生回数の関数だからである。センサCiによって記録されたデータから、センサCiごとの相当損傷Diを推定することが可能である;この相当損傷Diは、センサCiの閾値S(Ci)よりも高いが上限閾値S(Ci+1)よりも低い応力の印加から生じる損傷に対応する。
【0076】
疲労の法則は、そこに印加される全ての応力から生じる部品の総損傷DTOTALが、線形に分解されて各範囲の応力の相当損傷の合計になることが可能であることを、教示している。言い換えると全ての応力がセンサCiの連続する閾値の間の間隔に対応する応力の範囲に分割された場合、部品の損傷DTOTALの良好な近似値は、各応力範囲の相当損傷Diの合計によって得られ、すなわち
【数1】
となる。
【0077】
DTOTALを計算するために、このセンサCiの閾値S(Ci)と上限閾値S(Ci+1)との間に含まれる応力の発生回数n(Ci)が、センサCi(i=1から5)によって記録されたデータから、各センサCiについて計算される。センサCiの相当損傷Diがその後この数n(Ci)に基づいて、当該応力の範囲を表す1つ以上の応力にこれを適用することによって、計算されることが可能である。応力の範囲における応力の正確な分布を知らなくても、この例において近似値を求めることは可能である;いくつかのソリューションが考えられる:
2つの閾値の間の変形の平均値(μdef(average)=(S(Ci)+S(Ci+1))/2)を使用すること、および結果的に生じる損傷Diがこの平均変形μdef(average)の発生回数n(Ci)から生じるものであると考えることが、可能である;
閾値の間に適用されるべき加重平均を決定するために統計的分析を実行すること、およびこの加重平均を使用することが、可能である;
安全のため、応力範囲の上限(S(Ci+1))を取ること、および相当損傷Diがこの上限S(Ci+1))に対応する変形の発生回数n(Ci)に対応すると考えること(いわゆる「控えめな」前提)が、可能である。
【0078】
その他の近似値も可能である。本発明の好適な実施形態において、飛行における安全に関する最も要求の厳しい基準を満たすために、最終近似(控えめな仮定)が選択される。したがって、計算された変形Diは実際の変形よりも大きい。
【0079】
センサCiによって計数された発生回数n(Ci)を決定するために、センサCiのビットの合計N(Ci)から、このセンサCiの閾値S(Ci)に対する上限閾値S(Ci+1)よりの高い応力に対応する全ての信号を減じる必要がある。
【0080】
したがって、全ての発生回数n(Ci)を決定するために、我々は、最も高い閾値を有するセンサC5から始める。
【0081】
したがって、たとえば図4において:
n(C5)=N(C5)=1000なので、センサC5はその閾値S(C5)=5000μdefよりも高い応力を1000回計数した;
n(C4)=N(C4)−N(C5)=0なので、センサC4は、その閾値S(C4)=4000μdefと上限閾値S(C5)との間の応力を計数しなかった(具体的には、カウンタC4の全てのビットはS(C5)よりも高い応力に対応するので、これらは既にセンサC5によって計数済みである);
n(C3)=N(C3)−N(C4)=2000−1000=1000なので、センサ3は、その閾値S(C3)=3000μdefと上限閾値S(C4)との間の応力を1000回計数した;
n(C2)=N(C2)−N(C3)=4000−2000=2000なので、センサC2は、その閾値S(C2)=2000μdefと上限閾値S(C3)との間の応力を2000回計数した;
n(C1)=N(C1)−N(C2)=8000−4000=4000なので、センサ1は、その閾値S(C1)=1000μdefと上限閾値S(C2)との間の応力を4000回計数した。
【0082】
上記で計算されたn(Ci)の各々について、N(S(Ci+1))であるところの部品の相当損傷Di(Di=n(Ci)/N(S(Ci+1)))は、部品の破損を招く上限閾値S(Ci+1)の変形に対応する応力の発生回数である(上記の近似値参照)。
【0083】
最後に、先に説明されたように、部品が被る総損傷DTOTALは、各範囲の応力に対応する損傷の合計に等しく、すなわちn個のセンサについて
【数2】
である。
【0084】
一例として、5つのセンサを備えるシステムが説明されてきた。これはより多くのまたは少ないセンサを含んでもよく、より一般的はn個のセンサを含んでもよいことは、言うまでもない。したがって、上記の様々な式は、i=1からnについて使用される。
【0085】
再び、そしてより総合的な方式で、n個のセンサに対する本発明の方法の好適な実施形態の適用が、説明される。方法はこの場合、以下のステップを含む:
1)n個のセンサCiは、それらの閾値S(Ci)よりも高い応力の発生回数N(Ci)を測定し;
2)これらのデータN(Ci)は時間tにわたって記録され;
3)各センサCiについて、全発生回数N(Ci)(i=1からn)に基づいて、センサCiの閾値S(Ci)と上限閾値S(Ci+1)との間の応力に対応する発生回数n(Ci)が以下の式にしたがって計算され;
n(Cn)=N(Cn);
i<nの場合、n(Ci)=N(Ci)−N(Ci+1);
4)各センサCiについて、センサCiの閾値S(Ci)と上限閾値S(Ci+1)との間の応力の範囲に対応する部品の相当損傷Diが計算され;
5)部品の総損傷DTOTALが以下の式にしたがって計算される;
【数3】
【0086】
言い換えると、本発明のシステムおよび方法により、増分センサCi(i=1からn)が取り付けられ、各センサは応力閾値S(Ci)(およびしたがって連続する応力のn個の範囲に分割された応力)に設定されている、部品について、各範囲の応力に対応する相当疲労(相当損傷Di)への分割に基づく総疲労(総損傷DTOTAL)を得ることを可能にする複素疲労スペクトルを、得ることができる。
【0087】
したがって、簡素化されたメンテナンス方法を適用することが可能である。
【0088】
たとえば、作業者は、センサCiによって記録されたデータを受信するための装置13を保有してもよい。図3に示されるシステムの例において、装置13は、システムの処理装置11と電波12によって通信するために配置されている;当然ながら、その他いずれかの形態の通信が提供されてもよい。
【0089】
当然ながら、システム10がセンサCiによって測定されたデータの記憶用の処理装置を含んでいない場合には、センサが記録したデータをそこに個別に送信するように、センサCiと直接通信するために装置13が配置されてもよい。
【0090】
装置13は、上述の方法により、記録されたデータ(センサCiのビットN(Ci)(i=1からn))に基づいて、部品の対応する損傷DTOTALを計算できるようにする、計算ソフトウェアプログラム(アルゴリズム)を備える処理装置を含む。
【0091】
したがって、作業者は自らの装置13を部品(たとえば飛行機のサスペンション)に近づけ、装置は、自動的にまたは命令にしたがって、センサCiによって記録されたデータをダウンロードし、サスペンションの損傷DTOTAL、すなわち疲労を計算し、これによって結果的に作業者が判断を下すことができるようになる。たとえば:
損傷DTOTALが0から0.3の間であれば、オーバーホールは不要であり;
損傷DTOTALが0.3から0.8の間であれば、オーバーホールは必要であり;
損傷DTOTALが0.8より大きければ、部品は交換されなければならない。
【0092】
さらに、分析は、作業者自身によってではなく、装置13によって自動的になされると、考えることが可能である。こうして、オーバーホールが必要ではない場合には、装置13は信号を発信せず(またはたとえば青信号を発信し)、オーバーホールが必要な場合には、装置13は音声信号を発信する(またはたとえば赤信号を発信する)。
【0093】
装置13によって収集された情報が、コンピュータサーバまたはこの情報を受信して処理するために配置されたその他いずれかの装置に、自動的にまたは作業者の要求に応じて、送信されると考えることも可能である。
【0094】
ユーザの希望に応じて、その他いずれの操作も考えられる。具体的には、部品の疲労の監視は、特定レベルの疲労を超過したときに第三者(飛行機のパイロット、その製造者、その作業者、コンピュータサーバ、またはその他の要素など)に自動的に警告する処理装置11(たとえばFADEC)によって、自動的に実行されると、考えることが可能である。
【0095】
最後に、本発明のシステム10は、部品が曝される応力を計数し、結果的に複素疲労スペクトルを構成することを、可能にする。システム10はまた、部品の使用期間中の事象履歴を正確に捕捉することも、可能にする。低振幅閾値を有するセンサは、より具体的には部品の通常使用に関する、すなわちそれが初めて使用されたときからの有効使用期間に関する情報を、提供する。高振幅閾値を有するセンサは、より具体的には、たとえば硬着陸などの部品が曝されてきた例外的応力に関する情報を、提供する。このためシステムは、部品のエンドユーザにとって、良好なメンテナンスツールである。
【0096】
特定の一実施形態によれば、センサが一定間隔でビットを配信させるクロックを含むことが考えられるが、このビットは、センサがその閾値を破る応力に曝されていないときには0に等しく、センサがその閾値を破る応力に曝されているときには1に等しい。これは、デジタルセンサを用いれば可能であろう。
【0097】
好適な実施形態において、その閾値より高い応力による励起の場合にのみ信号を配信する機械的センサを使用することが、好ましい;このような機械的センサは、使用のみならずエネルギーの供給も簡単であるという利点を有する。
【0098】
システム10は正の変形(μdefが正の値のみを取る)に関して説明されてきたことに注目してほしい。別の実施形態によれば、システムは、正の閾値(μdef>0)を取るセンサ、および/または負の閾値(μdef<0)を取るセンサを含んでもよく、これは、たとえば1つの方向(引張)および別の方向(圧縮)の応力を計数することを、可能にする。
【0099】
同じ応力閾値を有するいくつかのセンサ(少なくとも2つ)を提供することが可能であることも、特筆すべきである。これは、これらセンサの1つが故障したときに、別のものがまだこの閾値に対応する応力の発生回数を計数できるようにする。ちなみに、1つの閾値に関する(その)または全てのセンサが故障した場合には、故障した場合の閾値のセンサの応力が低閾値のセンサによって計数されることになるので、複数のセンサの存在によって誤差を最小化することができることも、特筆すべきである。
【0100】
当然ながら、センサの数が多いほど、連続する閾値の間の増分がより小さいため、そのうちのいくつかが故障した場合において安全性がより高くなり、また総疲労の計算がより正確になる。増分は、全て同一であってもよく、あるいは漸進的であってもよい;増分の漸進の値は、最も一般的な応力範囲においてより正確な測定値、および(いずれにせよ非常に高い応力を発生する)例外的応力についてより不正確な測定値を有することができるものである。好ましくは、それが受ける損傷の判定にとって望ましい精度に応じて、2個から50個のセンサが1つの部品に配置される。
【0101】
たとえば、最小検出変形は1000μdef(第一センサC1の閾値)に等しくてもよく、最大検出変形は、200μdefに等しい連続する閾値の間の間隔をもって、5000μdef(最後のセンサCnの閾値)に等しくてもよい(この場合、閾値がそれぞれ1000、1200、1400、...、5000に等しい、21個のセンサが設けられている)。
【0102】
本発明のシステム10は、部品上に配置されるものとして説明されてきたが、しかしこれは、複数の部品からなる構造体に配置され、アセンブリの疲労が監視されるようにしてもよい。
【0103】
航空用途において、センサは好ましくは、−55℃から600℃(特にターボジェットサスペンションの場合)の範囲の温度に耐えられるべきであり、油および燃料の飛沫に耐えられるべきである。これらはまた好ましくは、腐食および汚染、特に水、塩、砂、およびスラッジの噴霧に関わるものにも、耐えられるべきである。さらに、有利なことにこれらは、浸透検査などの非破壊検査、渦電流、X線などの印加にも耐えられるべきである。好ましくはこれらは、様々な波長(無線、可聴など)との電磁適合性を有するべきである。センサはまた、数十キロヘルツ程度であってもよいターボジェットの機械的振動、特にターボジェットの回転部品の回転によるもの(低圧スプールで1分あたり0から5500回転、および高圧スプールで1分あたり0から20,000回転)にも耐えることができ、数十から数万G(9.81m.s−2)の衝撃に耐えられるべきである。好ましくはこれらはまた、様々なタイプの負荷の下での静的および準静的たわみにも耐えるべきである。
【0104】
センサはまた、部品の使用寿命を通じてその疲労状態を監視するように設計されているので、少なくともこれらが取り付けられることが意図されている部品と同じ使用寿命を有するべきである。たとえば、その使用寿命は、60年、または70,000または80,000飛行サイクル(離陸−飛行−着陸)より長くてもよい。
【0105】
好ましくは、センサは、その閾値を超える応力の発生回数109回超を持ちこたえることができる。それらの使用およびそれらに対する動的負荷の印加を通じて、センサは好ましくは、それらの動作において悪影響を受けてはならない。
【0106】
好ましくは、センサの電源は、航空機の電源から独立している。
【0107】
本発明のシステムは、ターボジェットサスペンション装置、特にこれらの装置の連接棒、そのビーム、あるいはその他のパイロンにとって、特に有利である。本発明のシステムはまた、飛行機の着陸装置上に、または制動棒上に、有利に配置されてもよい。一般的に、これは装着可能な(すなわちその上にセンサを取り付けることが可能な)、そしてその使用が複素疲労スペクトルの取得を正当化する様々な応力を発生させる、いずれの部品上にも配置されてよい;これはとりわけ、ターボジェットの様々な連接棒およびシャックルの場合である。
【0108】
本発明のセンサは、たとえば(少ない発生回数で破損が発生し、明白な塑性変形が先行する、高応力下の)オリゴサイクリック疲労の各領域、疲労の各領域(または応力が減少するとき増大するいくつかのサイクル後に破損が見込まれる場合の制限的持久)、および無制限持久の各領域のために、ヴェーラー曲線において従来指定された応力の下の様々なタイプの疲労を監視することを、可能にする;当然ながら、部品は通常この領域に対応する応力によって破損が発生し得る前に交換されるので、無制限持久の領域はあまり重要ではない。
【0109】
本発明の好適な実施形態によれば、システム10のセンサCiは、導入部で既に説明されたMEMSタイプの装置(またはセンサ)に取り付けられる。
【0110】
MEMSタイプの装置は、その小ささのため、応答時間が著しく短い微小機構を含み、これが非常に迅速な反応時間を装置に提供することを、特筆することが可能である。
【0111】
さらに、このような装置は、ターボジェットの部品に容易に収容されることができる。これらはまた電源内蔵式であってもよく、したがって自律的であり、これによって取り付けが容易になり、アセンブリの安全を保証する。MEMSタイプの装置の電源内蔵手段は、たとえばターボジェットの周囲エネルギーを電気エネルギーに変換するように配置された手段(たとえば周囲ガスを用いて電力を発生して装置に動力供給するマイクロタービン)からなってもよい。さらに、MEMSタイプの装置のセンサによって測定されたデータを処理する手段が、この同じ装置に設けられることも可能である。
【0112】
本発明は好適な実施形態を参照して記載されてきたが、その他の実施形態も考えられることは言うまでもない。具体的には、記載された様々な実施形態の特徴は、不適合性がなければ、ともに組み合わせられることが可能である。
【特許請求の範囲】
【請求項1】
機械的応力に曝される航空機部品(7、8、P、P’、9a、6’)の疲労を測定するシステムであって、システムは、部品(7、8、P、P’、9a、6’)に実装された複数の応力センサ(Ci)を含み、各センサは、所定の機械的応力閾値(S(Ci))を検出し、この閾値(S(Ci))の突破を表すデータ信号(Si)を配信するために配置されており、システムはこれらのデータを記録する手段(11)を含み、
センサ(Ci)は、1つの同じ応力の異なる閾値(S(Ci))を検出するために配置されており、この閾値は、各センサの閾値突破発生回数に基づいて、当該機械的応力による部品(7、8、P、P’、9a、6’)の疲労の推定値を計算することを可能にするように段階分けされていることを特徴とする、システム。
【請求項2】
データ記録手段を含む処理装置(11)を含み、センサ(Ci)は処理装置(11)にデータを送信する手段を含む、請求項1に記載のシステム。
【請求項3】
各センサ(Ci)がデータ記録手段を含む、請求項1に記載のシステム。
【請求項4】
部品(7、8、P、P’、9a、6’)の疲労の推定値を計算するために配置された、データを分析する遠隔手段(13)にこれらのデータを送信する手段を含む、請求項3に記載のシステム。
【請求項5】
センサ(Ci)がMEMSタイプのセンサである、請求項1から4のいずれか一項に記載のシステム。
【請求項6】
特定の機械的応力に曝される航空機部品(7、8、P、P’、9a、6’)の疲労を測定する方法であって、
前記機械的応力の所定の閾値(S(Ci))を検出することが可能なセンサが部品上に配置され、前記センサは互いに対して段階分けされており、各々が前記応力によるその閾値(S(Ci))の突破を表すデータ信号(Si)を配信することが可能であり、
各閾値(S(Ci))を破る測定の発生回数(N(Ci))が記録され、
この発生回数(N(Ci))に基づいて、前記応力によって発生した部品(7、8、P、P’、9a、6’)の疲労の推定値が計算される、方法。
【請求項7】
各閾値(S(Ci))について、総発生回数(N(Ci))に基づいて、前記閾値(S(Ci))の突破であって上限閾値(S(Ci+1))未満の測定の発生回数(nCi)が計算され、
2つの連続する閾値(S(Ci)、S(Ci+1))の間の各間隔について、前記計算発生数(n(Ci))に対応する多くの応力の、および上限閾値S(Ci+1))のそれに等しい応力値の印加に対応する、部品(7、8、P、P’、9a、6’)の相当疲労(Di)が計算され、
閾値(S(Ci)、S(Ci+1))の各間隔について計算された相当疲労(Di)は、部品の総疲労(DTOTAL)を得るために加算される、請求項6に記載の方法。
【請求項8】
請求項1から5のいずれか一項に記載のシステムを用いて適用される、請求項6および7のうちの1つに記載の方法。
【請求項9】
機械的応力に曝される少なくとも1つの部品(7、8、P、P’、9a、6’)、および請求項1から5のいずれか一項に記載のシステムに準じて疲労(10)を測定するシステムを含む、航空機メンテナンス方法であって、
システムによって記録されたデータ(10)を送信する要求がシステム(10)に送信され、
データが受信され、
これらのデータに基づいて、当該機械的応力の各々による部品(7、8、P、P’、9a、6’)の疲労の推定値が計算される、メンテナンス方法。
【請求項10】
携帯用送受信器(13)によって、無線で要求が送信されてデータが受信される、請求項9に記載のメンテナンス方法。
【請求項1】
機械的応力に曝される航空機部品(7、8、P、P’、9a、6’)の疲労を測定するシステムであって、システムは、部品(7、8、P、P’、9a、6’)に実装された複数の応力センサ(Ci)を含み、各センサは、所定の機械的応力閾値(S(Ci))を検出し、この閾値(S(Ci))の突破を表すデータ信号(Si)を配信するために配置されており、システムはこれらのデータを記録する手段(11)を含み、
センサ(Ci)は、1つの同じ応力の異なる閾値(S(Ci))を検出するために配置されており、この閾値は、各センサの閾値突破発生回数に基づいて、当該機械的応力による部品(7、8、P、P’、9a、6’)の疲労の推定値を計算することを可能にするように段階分けされていることを特徴とする、システム。
【請求項2】
データ記録手段を含む処理装置(11)を含み、センサ(Ci)は処理装置(11)にデータを送信する手段を含む、請求項1に記載のシステム。
【請求項3】
各センサ(Ci)がデータ記録手段を含む、請求項1に記載のシステム。
【請求項4】
部品(7、8、P、P’、9a、6’)の疲労の推定値を計算するために配置された、データを分析する遠隔手段(13)にこれらのデータを送信する手段を含む、請求項3に記載のシステム。
【請求項5】
センサ(Ci)がMEMSタイプのセンサである、請求項1から4のいずれか一項に記載のシステム。
【請求項6】
特定の機械的応力に曝される航空機部品(7、8、P、P’、9a、6’)の疲労を測定する方法であって、
前記機械的応力の所定の閾値(S(Ci))を検出することが可能なセンサが部品上に配置され、前記センサは互いに対して段階分けされており、各々が前記応力によるその閾値(S(Ci))の突破を表すデータ信号(Si)を配信することが可能であり、
各閾値(S(Ci))を破る測定の発生回数(N(Ci))が記録され、
この発生回数(N(Ci))に基づいて、前記応力によって発生した部品(7、8、P、P’、9a、6’)の疲労の推定値が計算される、方法。
【請求項7】
各閾値(S(Ci))について、総発生回数(N(Ci))に基づいて、前記閾値(S(Ci))の突破であって上限閾値(S(Ci+1))未満の測定の発生回数(nCi)が計算され、
2つの連続する閾値(S(Ci)、S(Ci+1))の間の各間隔について、前記計算発生数(n(Ci))に対応する多くの応力の、および上限閾値S(Ci+1))のそれに等しい応力値の印加に対応する、部品(7、8、P、P’、9a、6’)の相当疲労(Di)が計算され、
閾値(S(Ci)、S(Ci+1))の各間隔について計算された相当疲労(Di)は、部品の総疲労(DTOTAL)を得るために加算される、請求項6に記載の方法。
【請求項8】
請求項1から5のいずれか一項に記載のシステムを用いて適用される、請求項6および7のうちの1つに記載の方法。
【請求項9】
機械的応力に曝される少なくとも1つの部品(7、8、P、P’、9a、6’)、および請求項1から5のいずれか一項に記載のシステムに準じて疲労(10)を測定するシステムを含む、航空機メンテナンス方法であって、
システムによって記録されたデータ(10)を送信する要求がシステム(10)に送信され、
データが受信され、
これらのデータに基づいて、当該機械的応力の各々による部品(7、8、P、P’、9a、6’)の疲労の推定値が計算される、メンテナンス方法。
【請求項10】
携帯用送受信器(13)によって、無線で要求が送信されてデータが受信される、請求項9に記載のメンテナンス方法。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公表番号】特表2013−511051(P2013−511051A)
【公表日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願番号】特願2012−539284(P2012−539284)
【出願日】平成22年11月15日(2010.11.15)
【国際出願番号】PCT/EP2010/067455
【国際公開番号】WO2011/061141
【国際公開日】平成23年5月26日(2011.5.26)
【出願人】(505277691)スネクマ (567)
【Fターム(参考)】
【公表日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願日】平成22年11月15日(2010.11.15)
【国際出願番号】PCT/EP2010/067455
【国際公開番号】WO2011/061141
【国際公開日】平成23年5月26日(2011.5.26)
【出願人】(505277691)スネクマ (567)
【Fターム(参考)】
[ Back to top ]