
航空機の識別方法、並びにそれを用いた航空機騒音の測定方法及び信号判定方法
【課題】民間機と軍用機を含めた航空機の識別方法を提供する。
【解決手段】航空機が放射する電波高度計電波、対空・対地走査電波、気象レーダ信号、敵味方識別信号、及び/又はトランスポンダ応答信号の電波の周波数掃引又はパルスの変調方式及び/又は偏波面の違いを解析することによって、上空を飛行する各航空機の自動識別を行う。そして、民間機と軍用機の飛行空域が重なる場所での航空機騒音の自動測定を行う。また、航空機の自動識別方法を用いて演算処理した航空機の自動識別データを騒音測定の測定開始トリガーや統計処理を用いた信号判定に用いる。
【解決手段】航空機が放射する電波高度計電波、対空・対地走査電波、気象レーダ信号、敵味方識別信号、及び/又はトランスポンダ応答信号の電波の周波数掃引又はパルスの変調方式及び/又は偏波面の違いを解析することによって、上空を飛行する各航空機の自動識別を行う。そして、民間機と軍用機の飛行空域が重なる場所での航空機騒音の自動測定を行う。また、航空機の自動識別方法を用いて演算処理した航空機の自動識別データを騒音測定の測定開始トリガーや統計処理を用いた信号判定に用いる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、航空機騒音の測定において、測定した航空機騒音の発生源の航空機を自動識別する技術に関する。
【背景技術】
【0002】
航空機が発する騒音は非常に大きく、飛行場や飛行経路近くに住む人々の生活を妨害し、特に、夜間に発せられる場合には睡眠を妨害し健康等に多大な影響を及ぼす。そこで、航空機騒音を精度良く測定して、その対策を講じることは重要である。
現在、地方自治体や空港管理者等によって騒音測定が行われている。航空機の騒音はその影響範囲が広く、季節や時間帯、気象条件、空港の運用形態(使用する滑走路や離着陸する方向の違い)等によって大きく変動するため、航空機騒音を精度良く測定するには現場を熟知した音響技術者が測定地点に常駐して行う有人測定が望ましい。しかし、通常、最低でも1週間連続、場合によっては通年で測定を行うことも多いため、自動測定装置を用いた無人自動測定に頼らざるを得ない(非特許文献1)。
航空機騒音の自動測定では、航空機の騒音だけを抽出して測定することは難しいため、発生した騒音が航空機由来かどうかを識別する装置や方法が考案、実用化されている。例えば、複数の飛行場の空域が重なる地域で測定を行う場合、観測された騒音の発生源を特定し、さらに当該航空機が離着陸した飛行場を特定する技術として、民間航空機が常時継続的に放射している水平面無指向性のトランスポンダ応答信号電波を受信して、その電界強度レベル変化、信号解読による機種識別及び飛行高度データと対比して電界強度ピーク値採取時点により至近点通過時刻の測定をする方法がある(特許文献1)。また、航空機から下方に指向放射されている対地高度測定用電波を受信してその電界強度レベル変化をコンピュータに入力記録し、ピーク値発生時点によって至近点通過時刻を測定する方法がある(特許文献2)。
【0003】
【特許文献1】特許1750374号
【特許文献2】特許3699705号
【非特許文献1】航空機騒音の自動測定現場における工夫(2005年10月、騒音制御29巻5号)
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、軍用機は、民間機と同様の方式で機体識別信号、トランスポンダ応答信号、及び/又は対地高度距離測定電波等を放射しないことがあるため、特許文献1及び2の方法を用いて軍用機の自動騒音測定を行うことは難しく、よって、民間機と軍用機の飛行空域が重なる場所での航空機騒音を自動測定し、民間機と軍用機それぞれの騒音影響を把握することは不可能であった。
本発明は、斯かる課題に鑑みてなされたもので、上記課題を解決できる軍用機及び民間機を問わず航空機を識別する装置及び方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明の請求項1に記載の航空機の識別方法では、航空機の識別方法であって、航空機から放射された電波を受信する電波受信工程と、前記電波を検波する検波工程と、該検波工程から出力されるアナログ信号をデジタル信号に変換するA/D変換工程と、該A/D変換工程によって変換されたデジタル信号を解析し、電波の変調方式及び/又は偏波面の違いによって前記航空機の識別を行う演算処理工程と、該演算処理工程による演算処理結果を記録する記録工程とを備えたことを特徴とする。
本発明の請求項2に記載の航空機の識別方法では、前記航空機の識別は、軍用機もしくは民間機の識別であることを特徴とする。
本発明の請求項3に記載の航空機の識別方法では、前記変調方式の違いは、周波数掃引又はパルスの変調方式の違いであることを特徴とする。
本発明の請求項4に記載の航空機の識別方法では、前記電波は電波高度計電波、対空・対地走査電波、気象レーダ信号、敵味方識別信号、及び/又はトランスポンダ応答信号であることを特徴とする。
本発明の請求項5に記載の航空機の識別方法では、前記電波の周波数帯域は、4.2〜4.4GHz帯及び/又は8.0〜10.0GHz帯であることを特徴とする。
本発明の請求項6に記載の航空機の識別方法では、前記トランスポンダ応答信号に含まれるACAS信号電波の航空機個体識別符合、スコークコード、及び/又は気圧高度を用いて航空機の識別を行うことを特徴とする。
本発明の請求項7に記載の航空機の識別方法では、前記航空機の識別は、航空機情報データベースと照合して行うことを特徴とする。
本発明の請求項8に記載の航空機騒音の測定方法では、請求項1乃至7の何れかに記載の航空機の識別方法で識別された識別データを用いて、航空機騒音の発生源を特定することを特徴とする。
本発明の請求項9に記載の航空機騒音の測定方法では、請求項1乃至7の何れかに記載の航空機の識別方法で識別された識別データを航空機騒音の測定開始トリガーとすることを特徴とする。
本発明の請求項10に記載の航空機騒音の測定方法では、前記測定開始トリガーは、水平方向及び/又は下向に指向放射されている電波の電界強度レベル及び/又は電波から得られた識別データを用いることを特徴とする。
本発明の請求項11に記載の信号判定方法では、コンピュータにより騒音/分析対象を判定する信号判定方法であって、騒音又は振動に係る測定/分析対象のモデルは、請求項1乃至7に記載された航空機の識別方法で識別されたデータを用いて作成し、測定/分析対象であるかが未知の未知データを入力し、前記測定/分析対象のモデルの出力値を、前記未知データが測定/分析対象であるかの確率値として得ることを特徴とする。
本発明の請求項12に記載の航空機の識別装置では、航空機の識別装置であって、航空機から放射された電波を受信する電波受信手段と、前記電波を検波する検波手段と、該検波手段から出力されるアナログ信号をデジタル信号に変換するA/D変換手段と、該A/D変換手段によって変換されたデジタル信号を解析し、電波の変調方式及び/又は偏波面の違いによって前記航空機の識別を行う演算処理手段と、該演算処理手段による演算処理結果を記録する記録手段とを備えたことを特徴とする。
【発明の効果】
【0006】
本発明の航空機の識別方法によれば、航空機が放射する電波の変調方式及び/又は偏波面の違いを解析することによって、上空を飛行する各航空機が民間機か軍用機かに関わらず自動識別することが可能となる。また、航空機の自動識別データを騒音測定の測定開始トリガーや統計処理を用いた信号判定に用いることも可能となる。
【発明を実施するための最良の形態】
【0007】
(実施の形態1)航空機の識別
以下、本発明を実施するための最良の形態を図面を参照して説明する。
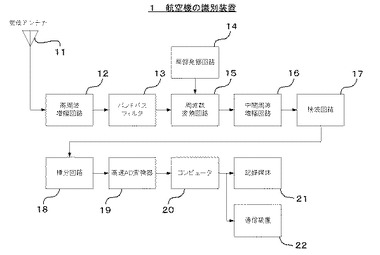
図1を参照して、本発明の実施の形態に係る航空機の識別装置1の構成について説明する。
まず、各航空機から放射された各周波数の電波が地上の測定点で受信アンテナ11で受信される。
受信された電波は、高周波増幅回路12を用いて特定の周波数範囲の選択増幅を行い、バンドパスフィルタ13を用いて特定の周波数範囲を通過させる。そして、局部発振回路14で特定の周波数の発振出力を得て、周波数変換回路15で中間周波数に変換する。さらに、中間周波増幅回路16で中間周波信号を増幅する。
次に、検波回路17で変調された信号から元の信号を取り出して、積分回路18で検波回路17の出力電圧から電界強度を演算し積分を行う。
次に、高速AD変換器19で積分回路18を介して得られたアナログ信号をデジタル信号に変換する。最終的にデジタル信号に変換された電波を基にコンピュータ20で演算を行い、航空機の識別を行う。
次に、記録媒体21でコンピュータ20による演算結果を記録し、通信装置22で演算結果の通信を行う。
【0008】
コンピュータ20では、航空機毎に異なる電波の性状を解析することにより、各航空機の識別を行う。具体的には、航空機から放射された各周波数の電波の変調方式及び/又は偏波面の違いを解析し、各航空機を識別することによって行う。使用する電波は、好ましくは航空機が飛行中に常時継続して又は頻繁に放射している電波や信号である。例として、以下に(1)〜(5)を示す。
【0009】
(1)電波高度計電波(対地高度距離測定電波)
航空機は飛行中の安全確保のため対地距離を正確に把握する必要があり、機体下面に1〜3個の対地高度距離測定電波の発信用アンテナを備え、直下方向に4.3GHz帯等の掃引又はパルスの変調方式の指向性電波(電波高度計電波)を常時放射しながら飛行している。
この電波高度計電波として、民間機は4.3GHzを中心とした4.2〜4.4GHzの範囲で複数の周波数を用いた周波数掃引方式を用いる。これは、S/Nを稼いで減衰を防ぐためである。一方で、軍用機は4.2〜4.4GHz若しくはそれ以上の帯域における単一周波数のパルス方式を用いる。これは、軍用機は編隊で飛ぶことが多いため、各軍用機毎に固有の単一周波数のパルス信号(例えば、4.25GHz、4.27GHz、4.29GHzといった各単一周波数)を放射することによって、相互の混信を防ぐためである。
そこで、このような電波高度計の発する電波の変調方式や偏波面の違い等の性状に着目することで、上空を飛行している航空機が民間機か軍用機かを自動識別する。なお、電波高度計の電波は鉛直方向に指向性を持つため、航空機が接近すると同時に急激に値が上昇する。電波高度計の電波は強い指向性を持つため、指向性の受信アンテナを前後左右に設置すると飛行方向も判別できる。
【0010】
(2)対空・対地走査電波
軍用機は飛行方向の前方に指向性を持つ8.0〜10.0GHz等の対空・対地走査電波を放射する。また、軍用機は機種によって異なる周波数帯域を用いるため、周波数、変調方式、及び/又は偏波面から軍用機を自動識別する。
【0011】
(3)気象レーダ信号
航空機は雷雲などの悪天候領域を探知するために気象レーダ信号を放射する。気象レーダ信号は、雨雲つまり水滴からの反射は反射電波の周波数が高いほど強くなるとともに減衰も大きくなり、近くの降雨,水滴で反射するとそれより遠いところの降雨,水滴からの反射は少なくなる。主に5GHz帯、9GHz帯の電波が使用されるが,特に遠距離を監視する場合,3GHz帯が使用される。また、気象レーダ信号は、一般に推進方向に指向性を有する。気象レーダ等から放射される周波数帯域や変調方法も搭載レーダ型式によって固有であるため、この電波を計測することによって上空を飛行する航空機を自動識別し、その周波数帯域、変調方式、及び/又は偏波面から気象レーダの型式を、さらにその型式から当該型式を搭載する航空機の機種を特定することも可能である。
【0012】
(4)敵味方識別信号
軍用機は敵味方を識別するために敵味方識別信号(Identification Friend or Foe)を放射する。敵味方識別信号は、飛行方向の水平方向に発射する味方軍特有の周波数の電波であって、規定の返信を得ることによって味方軍を判別する。例えば、8〜10GHz等の特定の電波を発射して、既定の返信があれば味方軍であると判別し、レーダスクリーン等に敵味方を区別して表示する。この特定の周波数の電波を解析することによって、航空機の機種を自動特定する。また、その信号自体のあり/なしも航空機を自動識別する。
【0013】
(5)トランスポンダ応答信号
旅客機などの民間航空機のみならず、自衛隊、米軍機などの軍用機、セスナ機、ヘリコプターなの小型機も含めほとんど全ての航空機は、トランスポンダ応答信号電波を放射する。トランスポンダ応答信号電波は、1090MHzの水平方向に指向性を持つ電波であり、各航空機を識別するコード(スコークコード)が含まれており、同時に測定することによって騒音測定の対象である航空機を特定する。また、その信号自体のあり/なしからも航空機を自動識別する。ただし、軍用機が編隊を組んでいる場合等には、その中の1機しかトランスポンダ応答信号を発信しない場合がある。
【0014】
また、トランスポンダから発信している種々の情報に着目することで、軍用機及び民間機等の航空機の識別精度を向上させることも可能である。
航空機が発信する信号として、ACAS信号電波(航空機衝突防止装置信号電波、1090MHz)がある。これには、24bitの航空機個体識別符号(航空機固有識別符号ともいう)が含まれている。
民間機の場合、99%以上がACAS信号電波/航空機個体識別符号を常時発信しているので、電波高度計信号電波と同時にACAS信号電波も併せて受信し、ACAS信号電波/航空機個体識別符号が発信されていない場合には、当該航空機は民間機ではない(軍用機である)と識別する。
さらに、軍用機であってもACAS信号電波/航空機個体識別符号を発信している場合があるので、ACAS信号電波/航空機個体識別符号を発信している場合には、予め作成しておいた航空機情報データベース(航空機個体識別符号と軍用機・民間機の区別、機種、国籍等の関係を記録したもの)を検索する。この航空機情報データベースは、目視調査、エアバンド聴取あるいは運航実績等から得た航空機個体識別符号と機種の関係を随時追加することによりデータベースの拡充が可能である。
このようにして、軍用機か民間機であるかを識別し、さらに、航空機の機種自体の識別も行う。
【0015】
また、航空機のトランスポンダから発信している信号としては、ACAS信号電波の他に、Mode−A(スコークコード)、Mode−C(気圧高度)がある。
ここで、ACAS信号電波/航空機個体識別符号を発信している航空機よりも、Mode−A/Cを発信している航空機の方が圧倒的に多いため、航空機個体識別符号を発信していない航空機や、航空機個体識別符号を発信しているが航空機情報データベースに未登録なため軍用機か民間機の識別ができない航空機であっても、これを用いることで高い確度で識別が可能となる。
さらに、航空機1機ごと、つまり機体ごとにユニークなACAS信号電波/航空機個体識別符号と異なり、スコークコードは飛行ごとに管制から割り当てられるものであって、割り当て方は管制ルールに基づいて行われるので、その管制ルールから軍用機や民間機の区別を推定することも可能である。
【0016】
なお、航空機が使用可能な電波や信号であれば、上記の例に限定されない。例えば、直線的に伝播し、かつ目標を鮮明に分離できる1GHz以上のマイクロ波等の任意の電波や信号を用いることが可能である。また、上記に示した電波や信号は、組合わせて使用することも可能である。
また、電波が対地高度測定用電波(電波高度計電波)の場合、電波高度計受信装置は、測定目的に応じて周波数掃引用又はパルス用のどちらか一方だけ設置することも可能である。例えば、民間航空機に限定し軍用機は測定対象から除外したい測定であれば、4.3GHzの周波数掃引信号電波受信装置だけ備えればよい。
また、4.3GHz帯域の周波数掃引信号用及びパルス信号用の両方の受信装置を設置する場合、受信アンテナは共通化し、検波回路以降のみを周波数掃引用とパルス用とで別系統とすることもできる。
【0017】
(実施の形態2)航空機の識別方法を用いた航空機騒音の測定
実施の形態1に記載した航空機の識別方法を用いて、航空機の接近を検知した場合に航空機騒音の測定における騒音測定開始の際のトリガーとする。電波信号は、上記したような無指向性や水平方向又は鉛直方向への有指向性といった任意の電波や信号を用いることが可能である。
放射する電波が例えば下方向に指向性を持つ場合には、伝搬速度が速い電波のピークが観測されたすぐ直後に最大騒音レベルが観測される。また、真下には指向性が無く推進方向に指向性があるものもある。このような受信パターンの特徴を利用することによって、騒音の発生を予測して騒音測定のトリガーに用いてもよい。トリガーとして用いる電波信号は、具体的には、対空・対地走査電波や気象レーダ信号等ように水平方向に指向性を持ち、航空機の接近と共に緩やかにその電界強度信号が上昇するものであってもよいし、対地高度測定用電波のように直下方向に指向性を持ち航空機が直上を通過する直前に電界強度レベルが急上昇するものであってもよい。
さらに、騒音測定開始の際のトリガーと連動して、騒音測定に関連する動作を行う。例えば、騒音の録音開始、ビデオ録画開始、起動に時間がかかる機器の立ち上げ、航空機の接近に際しての測定員の注意を喚起等の航空機騒音測定に関連する操作等が動作としてあげられる。
特に、航空機騒音の測定において騒音を録音する場合には、常時録音を行うよりも航空機騒音が生じている時に限定して録音を行うことは、騒音測定の効率を高めて、記憶領域等の節約になるだけでなく、聴取範囲を少なくすることが出来るので、データ整理の省力化が可能となる。
【0018】
(実施の形態3)航空機の識別方法を用いた航空機騒音の判定
実施の形態1に記載した航空機の識別方法を用いて、PCT/JP2008/058825で開示されている統計処理手法を用いた信号判定を行う。この信号判定は、測定/分析対象の予測モデル式に音源未知データを入力し、出力値を音源未知データが測定/分析対象であるかの確率値として得るものである。ここで予測モデル式を作成するためには、音源既知データとして測定されて分析区間が切り出された信号強度の時系列データを必要とする。
実際の航空機騒音の自動測定では、如何に航空機の騒音だけを抽出するかが重要となるが、実際の現場では、航空機だけでなく自動車、鉄道、工場、鳥や犬、その他様々な生活騒音が混在する。そのような環境で、人間のように目や耳を持たない機械が、騒音計が出力する騒音レベルのデジタル情報のみによって、航空機の騒音だけを抽出し測定することは困難であるが、本発明の識別方法を用いた信号判定を行うことにより高い精度で航空機騒音だけを抽出して測定することが可能になる。
具体的には、本実施の形態1で示す航空機の識別方法で識別された、航空機が放射する特有の電波の性状から演算処理して取得したデータを、測定/分析対象の予測モデル式に使用する音源既知データとして用いる。そして、音源未知データが航空機音であるか否か、さらに詳細に軍用機音であるか民間機音であるか否かも確率値として算出する。
【実施例】
【0019】
(実施例1)航空機騒音と電波電界強度測定例(軍用機)
航空機騒音又は航空機の飛行経路、飛行高度、飛行回数等の把握をするための測定をするために、米海軍と海上自衛隊が共同利用している神奈川県厚木飛行場の北側、約1.5km地点に測定点を設け、騒音計と共に4.3GHz帯周波数掃引電波、同4.3GHz帯パルス電波、9GHz帯周波数掃引電波、同9GHz帯パルス電波の各受信装置を設置し、電波受信信号を図1に示した回路を介し、それぞれの電界強度レベルがコンピュータに入力及び記録される。
軍用機の航空機騒音及び電波高度計電波電界強度測定例を図2に示す。周波数掃引方式の電波高度計電界強度レベルFS、パルス方式の電波高度計電界強度レベルP、及び騒音レベル変動NLを示す。設定条件を満たし自動測定器に最大騒音レベルと発生時刻が記録されたデータを○印で示す。
以下に、2007年1月19日の9:00〜9:22の間における実際の軍用機の離陸時における自動測定結果のデータ及び空港近傍での目視及びエアバンド聴取情報を示す。
(1)9:00頃に米海軍C−40Aが離陸する。なお、C−40Aは、民間機のB737−700型機を軍事転用している。自動測定では、最大80.0dBの騒音レベル変動NLと共に周波数掃引FS及びパルスPの両方の電波が検出される。
(2)9:03頃に海上自衛隊US−1Aが離陸する。自動測定では、最大76.9dBの騒音レベル変動NLと共にパルスPの電波のみが検出される。
(3)9:11頃に米海軍F/A−18F(スーパーホーネット)が離陸する。自動測定では、最大107.1dBの騒音レベル変動NLと共にパルスPの電波のみが検出される。
(4)9:16頃に米海軍F/A−18F(スーパーホーネット)が2機連続して離陸する。自動測定では、最大104.5dBの騒音レベル変動NLと共に各々のパルスPの電波のみが検出される。
(5)9:20頃に海上自衛隊P−3Cが離陸する。自動測定では、最大90.5dBの騒音レベル変動NLと共にパルスPの電波が検出される。
上記のように、離陸情報とほぼ時間が一致して、騒音レベル変動NLと同時に特徴的な急激な値の変化がパルス方式の電波高度計電界強度レベルPで観察される。従って、本発明を用いることによって、軍用機の航空機の自動識別が可能であることが示される。
【0020】
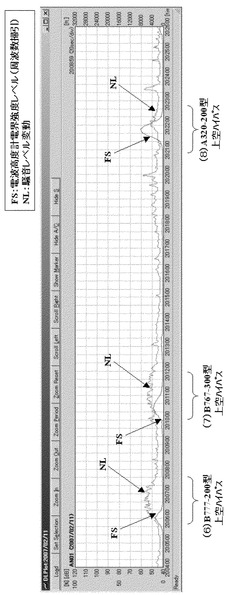
(実施例2)航空機騒音と電波電界強度測定例(民間機)
実施例1と同様の手法を用いて、民間機の航空機騒音及び電波高度計電波電界強度測定例を図3に示す。周波数掃引方式の電波高度計電界強度レベルFS及び騒音レベル変動NLが記録される。
以下に、2007年2月11日の20:04〜20:26の間における実際の民間機の離陸時における自動測定結果のデータ及び空港近傍での目視及びエアバンド聴取情報を示す。
(6)20:06〜20:08に民間機B777−200型機が上空をハイパス通過する。自動測定では、騒音レベル変動NLのピークと共に周波数掃引FSの電波が検出される。
(7)20:10〜20:12に民間機B767−300型機が上空をハイパス通過する。自動測定では、騒音レベル変動NLのピークと共に周波数掃引FSの電波が検出される。
(8)20:21〜20:23に民間機A320−200型機が上空をハイパス通過する。自動測定では、騒音レベル変動NLのピークと共に周波数掃引FSの電波が検出される。
上記のように、上空ハイパス通過情報とほぼ時間が一致して、騒音レベル変動NLと同時に特徴的な急激な値の変化が周波数掃引方式の電波高度計電界強度レベルFSで観察される。従って、本発明を用いることによって、民間機の航空機の自動識別が可能であることが示される。
【0021】
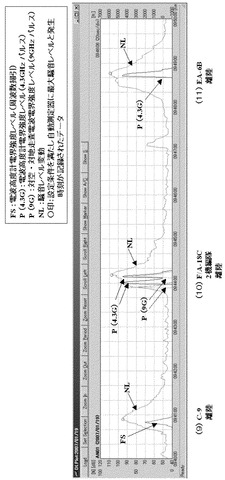
(実施例3)航空機騒音と電波電界強度測定例(民間機及び軍用機)
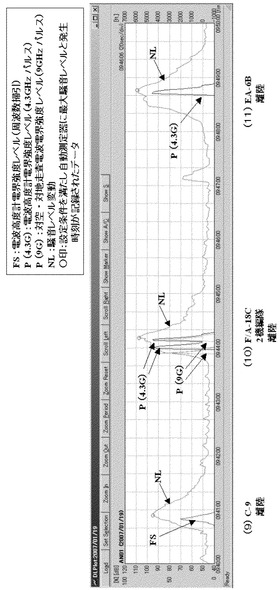
実施例1と同様の手法を用いて、民間機及び軍用機の航空機騒音及び電波高度計電波電界強度測定例を図4に示す。周波数掃引方式の電波高度計電界強度レベルFS、4.3GHzのパルス方式の電波高度計電界強度レベルP(4.3G)、9GHz帯のパルス方式の対空・対地走査電波電界強度レベルP(9G)、及び騒音レベル変動NLが記録される。設定条件を満たし自動測定器に最大騒音レベルと発生時刻が記録されたデータを○印で示す。
以下に、2007年1月19日の9:40〜9:50の間における実際の航空機の離陸時における自動測定結果のデータ及び空港近傍での目視及びエアバンド聴取情報を示す。
(9)9:40頃に米海軍C−9が離陸する。なお、C−9は、民間機のDC−9型機を軍事転用している。自動測定では、最大94.6dBの騒音レベル変動NLと共に周波数掃引FSの電波のみが検出される。また、パルス電波等は検出されない。
(10)9:43頃に米海軍F/A−18C(ホーネット)2機編隊が続けて離陸する。自動測定では、最大106.9dBの騒音レベル変動NLと共に各々の4.3GHz帯パルス電波P(4.3G)と9GHz帯パルス電波P(9G)の両方が検出される。
(11)9:48頃に米海軍EA−6B(プラウラー)が離陸する。自動測定では、最大108.8dBの騒音レベルNL変動と共に4.3GHzパルス電波P(4.3G)のみが検出される。また、9GHz帯のパルス電波等は検出されない。
上記のように、離陸情報とほぼ時間が一致して、騒音レベル変動NLと同時に特徴的な急激な値の変化が民間機(軍用機に転用される場合を含む)の場合は4.3GHz帯周波数掃引方式の電波高度計電界強度レベルFSが測定され、一方、軍用機の場合は4.3GHz帯パルス方式の電波高度計電界強度レベルP(4.3G)及び/又は9GHz帯パルス方式の対空・対地走査電波電界強度レベルP(9G)が測定される。従って、本発明を用いることによって、同時に観測された騒音レベルのピークの発生源がそれぞれ民間機又は軍用機であることが識別可能となり、民間機及び軍用機を含めた航空機の自動識別を同時に行うことも可能であることが示される。
【0022】
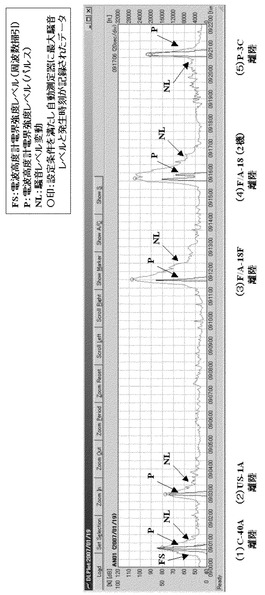
(実施例4) 識別性能
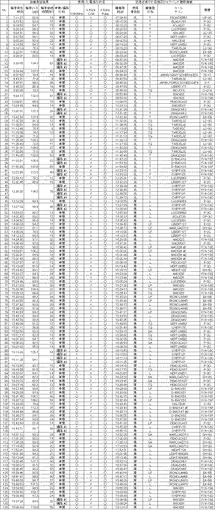
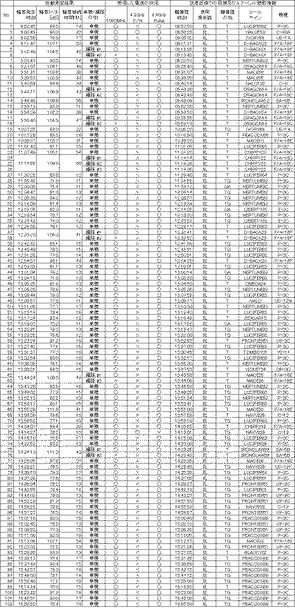
自動測定及び受信した電波の状況をデータにすると共に、測定員による空港近傍での目視及びエアバンド聴取情報目視観測を行い、航空機の識別性能の確認を行った。測定結果の一覧表を図5(2007年1月18日の測定例)及び図6(2007年1月19日の測定例)に示す。
自動測定結果として、自動測定器に最大騒音レベルが記録された騒音発生時刻毎に騒音レベル(dB)及び一定以上の騒音が継続した時間(秒)を示す。騒音継続時間は、現場ごとの状況に合わせて閾値を設定する。例えば、民間機のように飛行速度が遅い場合は長く、軍用機の場合は短く設定する。また、航空機までの距離が離れていると見かけ上の移動速度が遅くなるので、このような場合は軍用機であっても継続時間は長めに設定する。そして、現場ごとに航空機騒音を取りこぼさないように、更に可能であれば継続時間が短い自動車やバイクの通過騒音を取り込まないように設定する。
また、単機/編隊の別も示す。単機もしくは編隊は、目視で確認又はエアバンドを全て録音して推定する。
さらに、受信した電波の状況として、1090MHzで表すトランスポンダ応答信号、4.3GHz C/Wで表す4.3GHzの周波数掃引信号、4.3GHz Pulseで表す4.3GHzのパルス信号を示す。
さらに、上記の自動測定と同時に、空港での目視及びエアバンド聴取情報を収集し、離着陸時刻毎に情報と自動測定とを対応付けて示す。使用滑走路は、北:北向きの滑走路(北向きに離陸又は北向きに着陸する)、南:南向きの滑走路(南向きに離陸又は南向きに着陸する)を示す。また、離着陸の別の記号は、T:離陸機、L:着陸機、TG:タッチ・アンド・ゴー(艦載機の空母着艦訓練の一種で、着陸態勢から着地すると同時に離陸する飛行形態)、GA:ゴー・アラウンド(着陸態勢から着地せず離陸に移る飛行形態)、LP:ランディング・パス(着陸に先立ち、滑走路上空を高高度で一度通過する飛行形態)を示す。また、コールサインは航空機の無線電波の呼び出し符号を示す。また、機種は測定した航空機の機種を示す。
【0023】
図5のNo.25,26,47,89−91,99,101,106,108,119及び図6のNo.6,18,38,63,76では、トランスポンダ応答信号(1090MHz)が検出されない。これは、特許1750374号で示した従来技術では、軍用機を含む全ての航空機を識別することは不可能であることを示す。しかしながら、本発明の方法を用いることによって、漏れなく全ての航空機を識別することが可能となる。
このように、軍用航空機が編隊を組んでいる場合には、その内の1機のみしかトランスポンダ応答信号を発信しない場合等があり、全ての軍用機がトランスポンダ応答信号を発信する訳ではない。これは、例えば、飛行場近くまでは編隊で飛行し旋回時に編隊を解消し1機ごとに着陸、或いはその反対に1機ごとに離陸し上空で編隊になる場合には、トランスポンダ応答信号電波に着目する識別方法だけでは、トランスポンダ応答信号を発していない軍用機通過時の騒音を誤って航空機以外の騒音として識別して、取りこぼす問題があったが、本発明を用いることにより正確に軍用機として識別することが可能になる。
【0024】
図5のNo.5,7,20及び図6のNo.2,11,72以外の飛行機では、4.3GHzの周波数掃引信号が検出されない。これは、特許3699705号で示した従来技術では、軍用機を含む全ての航空機を識別することは不可能であることを示す。しかしながら、本発明の方法を用いることによって、漏れなく全ての航空機を識別することが可能となる。
【0025】
さらに、図5及び図6の測定結果をまとめて図7に示す。軍用機の自動識別機数とは、騒音と同時に4.3GHz帯パルス信号を受信できた機数である。また、民間機の自動識別機数とは、騒音と同時に4.3GHz帯周波数掃引信号を受信できた機数である。図7に示すように、本実施例の自動測定結果は、軍用機及び民間機型軍用機ともに識別率が100%である。
このように、本実施例において、延べ234機の測定において全く取りこぼしなく完璧に民間機及び/又は軍用機と識別できたということは、本発明の航空機の自動識別方法の有用性が高いことを裏付ける。
【0026】
(実施例5)実測データ
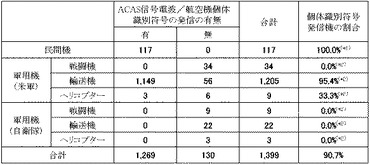
横田基地周辺におけるACAS信号電波/航空機個体識別符号発信の有無の実測データを示す。調査場所は瑞穂町南平(横田基地滑走路北端側方)であり、調査期間は2007年9月15日から11月14日である。
実測データを図8に示す。民間機及び軍用機(米軍及び自衛隊)、さらに、軍用機は戦闘機、輸送機、ヘリコプターの別についてのACAS信号電波/航空機個体識別符号発信の有無及び個体識別符号発信機の割合を示す。
すると、(*1)より、調査期間中の2ヶ月間に横田基地を離着陸した民間機は、100%がACAS信号電波/航空機個体識別符号を発信している。また、(*2)より、軍用機は、ACAS信号電波/航空機個体識別符号を発信している機体と、発信していない機体が混在している。なお、発信している軍用機については、航空機情報データベースと照合することで軍用機及び民間機の識別、さらには航空機の機種自体の識別が可能である。
【0027】
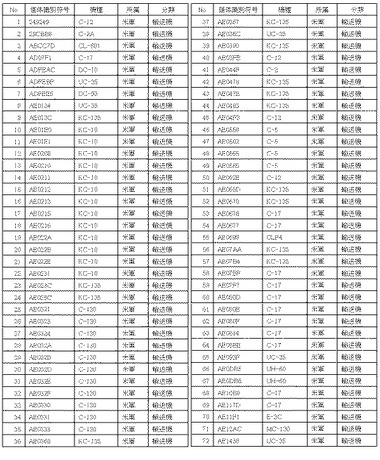
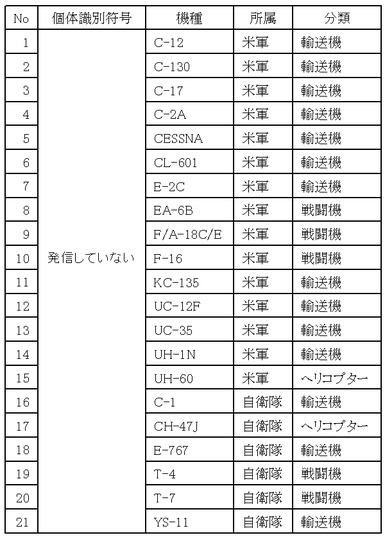
(実施例6)航空機情報データベース
航空機情報データベースとして使用する例を以下に示す。民間機における航空機情報データベースの例を図9に示す。軍用機における航空機情報データベースの例を図10に示す。個体識別符号を発信していない航空機における航空機情報データベースの例を図11に示す。
このように、予め、個体識別符号、機種、航空会社、所属、分類等を航空機情報データベースに登録しておき、受信した個体識別符号を用いて航空機情報データベースの検索を行い、各航空機の機種の識別をする。
【0028】
(実施例7)スコークコードの割り当てルール
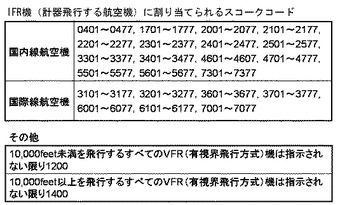
スコークコードの割り当てルールの例を以下に示す。レーダ管制機関別に割り当てられたスコークコードを図12に示す。IFR機(計器飛行する航空機)において、国内線及び国際線航空機に割り当てられたスコークコードを図13上段に示す。また、その他の割り当てられたスコークコードを図13下段に示す。
【0029】
例えば、ローカルコード(管制空域内のみを有視界で、10,000ft未満を飛行する航空機に割り当てられるスコークコード)である場合、これはある空港を離陸し別の空港に向かう旅客機や貨物機等に割り当てられることはなく、着陸や旋回飛行訓練を行っている軍用機やヘリコプターに割り当てられている可能性が極めて高いことから、当該航空機は軍用機であると高い確度で推定できる。
同様に、横田基地周辺で5201〜5277の範囲のスコークコードが割り当てられている場合、それは横田レーダ管制機関が割り当てたスコークコードとなっているため、これも軍用機である可能性が極めて高い。一方、国内線及び国際線航空機にはそれぞれスコークコードの範囲が決まっていることから、その範囲にあるものは民間機であると高い確度で推定できる。
【0030】
また、ACAS信号電波/航空機個体識別符号やMode−AのスコークコードとMode−Cの飛行高度(気圧高度)情報を併用することで軍用機及び民間機の識別確度をさらに高めることも可能である。
すなわち、Mode−Cから飛行する航空機の時々刻々の高度を把握することができるので、上空を複数の空域が重畳している場合に、当該航空機がどの空域を飛行しているかを判別することができる。
例えば、横田基地周辺の上空は、エリアによっても異なるが、地上から8,000ftまでが横田空域で、8,000ftより上が民間機に割り当てられている。したがって、同基地周辺で航空機騒音の自動測定を行っている場合には、8,000ft以下を飛行する軍用機と8,000ftより上を飛行する民間機の両方の騒音が観測されるが、Mode−C気圧高度から当該航空機が飛行している空域が判別できるため、軍用機・民間機の識別が可能となる。
また、同様に、木更津基地周辺では、羽田空港に着陸する又は羽田空港を離陸した航空機は3,000ft以上を飛行し、同基地の航空機やヘリコプターは3,000ft以下を飛行することになっているので、受信した気圧高度から軍用機及び民間機の識別が可能である。
【0031】
なお、一般的な航空機騒音の評価は、飛行場毎に行われている。これは、飛行場計画段階で行われる環境アセスメントでは、その飛行場の影響を予測しているため、事前事後の影響をアセスメント段階と比較をする上でも飛行場ごとの評価が必要となるからである。
そこで、本発明を用いることによって、複数の飛行場の空域が重なる地域で測定を行う場合においても、民間機及び軍用機に関わらず、全ての航空機騒音の発生源を特定することが可能となる。上述したように、航空機騒音は民間機及び軍用機に関わらず、自動測定が有効であるため、トランスポンダ応答信号等に含まれている機体識別情報を組合わせて解析することによって、空港の近傍で同様に測定した機体識別情報とを照合することによって騒音を発した航空機が離着陸した飛行場をも特定することも可能になる。
【0032】
実際に現在、国内には数多くの空港や飛行場が建設され、航空機騒音が問題となる場所では複数の空港・飛行場の離着陸機が錯綜して飛行する場所が多くなってきている。また、既に軍用機と民間機が共同利用している飛行場も多いが(名古屋空港、那覇空港、新千歳空港、三沢空港、米子空港等)、今後、軍用飛行場を民間飛行場として利用することが検討される飛行場も多い(米軍横田基地、航空自衛隊百里基地)。これより、本発明を用いることによって精度高く軍用機を含めた全航空機騒音を識別すること、及び/又は軍用機と民間機の区別が可能になり、空港・飛行場周辺の騒音測定の自動化が可能となるだけでなく、軍用機・民間機それぞれの騒音影響を区別して把握・評価することも可能となる。
【0033】
なお、上記実施の形態の構成、解析及び測定は例であって本発明の趣旨を逸脱しない範囲で適宜組合わせ及び変更できることは言うまでもない。
特に、航空機以外にも自動車や船舶等の各種乗り物、電子機器、家電製品、工場、施設等が放射する電波を用いて、対象物の自動識別測定をすることに応用することもできる。
【図面の簡単な説明】
【0034】
【図1】本実施の形態の航空機の識別装置の構成図である。
【図2】航空機騒音と電波高度計電波電界強度測定例(軍用機)を示した図である。
【図3】航空機騒音と電波高度計電波電界強度測定例(民間機)を示した図である。
【図4】航空機騒音と電波高度計電波電界強度測定例(民間機及び軍用機)を示した図である。
【図5】識別性能を示した一覧図(2007年1月18日)である。
【図6】識別性能を示した一覧図(2007年1月19日)である。
【図7】識別性能を示した図である。
【図8】横田基地周辺における実測データを示した図である。
【図9】航空機情報データベース例(民間機)を示した図である。
【図10】航空機情報データベース例(軍用機)を示した図である。
【図11】航空機情報データベース例(個体識別符号を発信していない航空機)を示した図である。
【図12】スコークコード(管制機関別)の割り当てルールを示した図である。
【図13】スコークコード(IFR機・その他)の割り当てルールを示した図である。
【符号の説明】
【0035】
1 航空機の識別装置
11 受信アンテナ
12 高周波増幅回路
13 バンドパスフィルタ
14 局部発振回路
15 周波数変換回路
16 中間周波増幅回路
17 検波回路
18 積分回路
19 高速AD変換器
20 コンピュータ
21 記録媒体
22 通信装置
FS 電波高度計電界強度レベル(周波数掃引)
P 電波高度計電界強度レベル(パルス)
P(4.3G) 電波高度計電界強度レベル(4.3GHz帯パルス)
P(9G) 対空・対地走査電波電界強度レベル(9GHz帯パルス)
NL 騒音レベル変動
○印 設定条件を満たし自動測定器に最大騒音レベルと発生時刻が記録されたデータ
【技術分野】
【0001】
本発明は、航空機騒音の測定において、測定した航空機騒音の発生源の航空機を自動識別する技術に関する。
【背景技術】
【0002】
航空機が発する騒音は非常に大きく、飛行場や飛行経路近くに住む人々の生活を妨害し、特に、夜間に発せられる場合には睡眠を妨害し健康等に多大な影響を及ぼす。そこで、航空機騒音を精度良く測定して、その対策を講じることは重要である。
現在、地方自治体や空港管理者等によって騒音測定が行われている。航空機の騒音はその影響範囲が広く、季節や時間帯、気象条件、空港の運用形態(使用する滑走路や離着陸する方向の違い)等によって大きく変動するため、航空機騒音を精度良く測定するには現場を熟知した音響技術者が測定地点に常駐して行う有人測定が望ましい。しかし、通常、最低でも1週間連続、場合によっては通年で測定を行うことも多いため、自動測定装置を用いた無人自動測定に頼らざるを得ない(非特許文献1)。
航空機騒音の自動測定では、航空機の騒音だけを抽出して測定することは難しいため、発生した騒音が航空機由来かどうかを識別する装置や方法が考案、実用化されている。例えば、複数の飛行場の空域が重なる地域で測定を行う場合、観測された騒音の発生源を特定し、さらに当該航空機が離着陸した飛行場を特定する技術として、民間航空機が常時継続的に放射している水平面無指向性のトランスポンダ応答信号電波を受信して、その電界強度レベル変化、信号解読による機種識別及び飛行高度データと対比して電界強度ピーク値採取時点により至近点通過時刻の測定をする方法がある(特許文献1)。また、航空機から下方に指向放射されている対地高度測定用電波を受信してその電界強度レベル変化をコンピュータに入力記録し、ピーク値発生時点によって至近点通過時刻を測定する方法がある(特許文献2)。
【0003】
【特許文献1】特許1750374号
【特許文献2】特許3699705号
【非特許文献1】航空機騒音の自動測定現場における工夫(2005年10月、騒音制御29巻5号)
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、軍用機は、民間機と同様の方式で機体識別信号、トランスポンダ応答信号、及び/又は対地高度距離測定電波等を放射しないことがあるため、特許文献1及び2の方法を用いて軍用機の自動騒音測定を行うことは難しく、よって、民間機と軍用機の飛行空域が重なる場所での航空機騒音を自動測定し、民間機と軍用機それぞれの騒音影響を把握することは不可能であった。
本発明は、斯かる課題に鑑みてなされたもので、上記課題を解決できる軍用機及び民間機を問わず航空機を識別する装置及び方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明の請求項1に記載の航空機の識別方法では、航空機の識別方法であって、航空機から放射された電波を受信する電波受信工程と、前記電波を検波する検波工程と、該検波工程から出力されるアナログ信号をデジタル信号に変換するA/D変換工程と、該A/D変換工程によって変換されたデジタル信号を解析し、電波の変調方式及び/又は偏波面の違いによって前記航空機の識別を行う演算処理工程と、該演算処理工程による演算処理結果を記録する記録工程とを備えたことを特徴とする。
本発明の請求項2に記載の航空機の識別方法では、前記航空機の識別は、軍用機もしくは民間機の識別であることを特徴とする。
本発明の請求項3に記載の航空機の識別方法では、前記変調方式の違いは、周波数掃引又はパルスの変調方式の違いであることを特徴とする。
本発明の請求項4に記載の航空機の識別方法では、前記電波は電波高度計電波、対空・対地走査電波、気象レーダ信号、敵味方識別信号、及び/又はトランスポンダ応答信号であることを特徴とする。
本発明の請求項5に記載の航空機の識別方法では、前記電波の周波数帯域は、4.2〜4.4GHz帯及び/又は8.0〜10.0GHz帯であることを特徴とする。
本発明の請求項6に記載の航空機の識別方法では、前記トランスポンダ応答信号に含まれるACAS信号電波の航空機個体識別符合、スコークコード、及び/又は気圧高度を用いて航空機の識別を行うことを特徴とする。
本発明の請求項7に記載の航空機の識別方法では、前記航空機の識別は、航空機情報データベースと照合して行うことを特徴とする。
本発明の請求項8に記載の航空機騒音の測定方法では、請求項1乃至7の何れかに記載の航空機の識別方法で識別された識別データを用いて、航空機騒音の発生源を特定することを特徴とする。
本発明の請求項9に記載の航空機騒音の測定方法では、請求項1乃至7の何れかに記載の航空機の識別方法で識別された識別データを航空機騒音の測定開始トリガーとすることを特徴とする。
本発明の請求項10に記載の航空機騒音の測定方法では、前記測定開始トリガーは、水平方向及び/又は下向に指向放射されている電波の電界強度レベル及び/又は電波から得られた識別データを用いることを特徴とする。
本発明の請求項11に記載の信号判定方法では、コンピュータにより騒音/分析対象を判定する信号判定方法であって、騒音又は振動に係る測定/分析対象のモデルは、請求項1乃至7に記載された航空機の識別方法で識別されたデータを用いて作成し、測定/分析対象であるかが未知の未知データを入力し、前記測定/分析対象のモデルの出力値を、前記未知データが測定/分析対象であるかの確率値として得ることを特徴とする。
本発明の請求項12に記載の航空機の識別装置では、航空機の識別装置であって、航空機から放射された電波を受信する電波受信手段と、前記電波を検波する検波手段と、該検波手段から出力されるアナログ信号をデジタル信号に変換するA/D変換手段と、該A/D変換手段によって変換されたデジタル信号を解析し、電波の変調方式及び/又は偏波面の違いによって前記航空機の識別を行う演算処理手段と、該演算処理手段による演算処理結果を記録する記録手段とを備えたことを特徴とする。
【発明の効果】
【0006】
本発明の航空機の識別方法によれば、航空機が放射する電波の変調方式及び/又は偏波面の違いを解析することによって、上空を飛行する各航空機が民間機か軍用機かに関わらず自動識別することが可能となる。また、航空機の自動識別データを騒音測定の測定開始トリガーや統計処理を用いた信号判定に用いることも可能となる。
【発明を実施するための最良の形態】
【0007】
(実施の形態1)航空機の識別
以下、本発明を実施するための最良の形態を図面を参照して説明する。
図1を参照して、本発明の実施の形態に係る航空機の識別装置1の構成について説明する。
まず、各航空機から放射された各周波数の電波が地上の測定点で受信アンテナ11で受信される。
受信された電波は、高周波増幅回路12を用いて特定の周波数範囲の選択増幅を行い、バンドパスフィルタ13を用いて特定の周波数範囲を通過させる。そして、局部発振回路14で特定の周波数の発振出力を得て、周波数変換回路15で中間周波数に変換する。さらに、中間周波増幅回路16で中間周波信号を増幅する。
次に、検波回路17で変調された信号から元の信号を取り出して、積分回路18で検波回路17の出力電圧から電界強度を演算し積分を行う。
次に、高速AD変換器19で積分回路18を介して得られたアナログ信号をデジタル信号に変換する。最終的にデジタル信号に変換された電波を基にコンピュータ20で演算を行い、航空機の識別を行う。
次に、記録媒体21でコンピュータ20による演算結果を記録し、通信装置22で演算結果の通信を行う。
【0008】
コンピュータ20では、航空機毎に異なる電波の性状を解析することにより、各航空機の識別を行う。具体的には、航空機から放射された各周波数の電波の変調方式及び/又は偏波面の違いを解析し、各航空機を識別することによって行う。使用する電波は、好ましくは航空機が飛行中に常時継続して又は頻繁に放射している電波や信号である。例として、以下に(1)〜(5)を示す。
【0009】
(1)電波高度計電波(対地高度距離測定電波)
航空機は飛行中の安全確保のため対地距離を正確に把握する必要があり、機体下面に1〜3個の対地高度距離測定電波の発信用アンテナを備え、直下方向に4.3GHz帯等の掃引又はパルスの変調方式の指向性電波(電波高度計電波)を常時放射しながら飛行している。
この電波高度計電波として、民間機は4.3GHzを中心とした4.2〜4.4GHzの範囲で複数の周波数を用いた周波数掃引方式を用いる。これは、S/Nを稼いで減衰を防ぐためである。一方で、軍用機は4.2〜4.4GHz若しくはそれ以上の帯域における単一周波数のパルス方式を用いる。これは、軍用機は編隊で飛ぶことが多いため、各軍用機毎に固有の単一周波数のパルス信号(例えば、4.25GHz、4.27GHz、4.29GHzといった各単一周波数)を放射することによって、相互の混信を防ぐためである。
そこで、このような電波高度計の発する電波の変調方式や偏波面の違い等の性状に着目することで、上空を飛行している航空機が民間機か軍用機かを自動識別する。なお、電波高度計の電波は鉛直方向に指向性を持つため、航空機が接近すると同時に急激に値が上昇する。電波高度計の電波は強い指向性を持つため、指向性の受信アンテナを前後左右に設置すると飛行方向も判別できる。
【0010】
(2)対空・対地走査電波
軍用機は飛行方向の前方に指向性を持つ8.0〜10.0GHz等の対空・対地走査電波を放射する。また、軍用機は機種によって異なる周波数帯域を用いるため、周波数、変調方式、及び/又は偏波面から軍用機を自動識別する。
【0011】
(3)気象レーダ信号
航空機は雷雲などの悪天候領域を探知するために気象レーダ信号を放射する。気象レーダ信号は、雨雲つまり水滴からの反射は反射電波の周波数が高いほど強くなるとともに減衰も大きくなり、近くの降雨,水滴で反射するとそれより遠いところの降雨,水滴からの反射は少なくなる。主に5GHz帯、9GHz帯の電波が使用されるが,特に遠距離を監視する場合,3GHz帯が使用される。また、気象レーダ信号は、一般に推進方向に指向性を有する。気象レーダ等から放射される周波数帯域や変調方法も搭載レーダ型式によって固有であるため、この電波を計測することによって上空を飛行する航空機を自動識別し、その周波数帯域、変調方式、及び/又は偏波面から気象レーダの型式を、さらにその型式から当該型式を搭載する航空機の機種を特定することも可能である。
【0012】
(4)敵味方識別信号
軍用機は敵味方を識別するために敵味方識別信号(Identification Friend or Foe)を放射する。敵味方識別信号は、飛行方向の水平方向に発射する味方軍特有の周波数の電波であって、規定の返信を得ることによって味方軍を判別する。例えば、8〜10GHz等の特定の電波を発射して、既定の返信があれば味方軍であると判別し、レーダスクリーン等に敵味方を区別して表示する。この特定の周波数の電波を解析することによって、航空機の機種を自動特定する。また、その信号自体のあり/なしも航空機を自動識別する。
【0013】
(5)トランスポンダ応答信号
旅客機などの民間航空機のみならず、自衛隊、米軍機などの軍用機、セスナ機、ヘリコプターなの小型機も含めほとんど全ての航空機は、トランスポンダ応答信号電波を放射する。トランスポンダ応答信号電波は、1090MHzの水平方向に指向性を持つ電波であり、各航空機を識別するコード(スコークコード)が含まれており、同時に測定することによって騒音測定の対象である航空機を特定する。また、その信号自体のあり/なしからも航空機を自動識別する。ただし、軍用機が編隊を組んでいる場合等には、その中の1機しかトランスポンダ応答信号を発信しない場合がある。
【0014】
また、トランスポンダから発信している種々の情報に着目することで、軍用機及び民間機等の航空機の識別精度を向上させることも可能である。
航空機が発信する信号として、ACAS信号電波(航空機衝突防止装置信号電波、1090MHz)がある。これには、24bitの航空機個体識別符号(航空機固有識別符号ともいう)が含まれている。
民間機の場合、99%以上がACAS信号電波/航空機個体識別符号を常時発信しているので、電波高度計信号電波と同時にACAS信号電波も併せて受信し、ACAS信号電波/航空機個体識別符号が発信されていない場合には、当該航空機は民間機ではない(軍用機である)と識別する。
さらに、軍用機であってもACAS信号電波/航空機個体識別符号を発信している場合があるので、ACAS信号電波/航空機個体識別符号を発信している場合には、予め作成しておいた航空機情報データベース(航空機個体識別符号と軍用機・民間機の区別、機種、国籍等の関係を記録したもの)を検索する。この航空機情報データベースは、目視調査、エアバンド聴取あるいは運航実績等から得た航空機個体識別符号と機種の関係を随時追加することによりデータベースの拡充が可能である。
このようにして、軍用機か民間機であるかを識別し、さらに、航空機の機種自体の識別も行う。
【0015】
また、航空機のトランスポンダから発信している信号としては、ACAS信号電波の他に、Mode−A(スコークコード)、Mode−C(気圧高度)がある。
ここで、ACAS信号電波/航空機個体識別符号を発信している航空機よりも、Mode−A/Cを発信している航空機の方が圧倒的に多いため、航空機個体識別符号を発信していない航空機や、航空機個体識別符号を発信しているが航空機情報データベースに未登録なため軍用機か民間機の識別ができない航空機であっても、これを用いることで高い確度で識別が可能となる。
さらに、航空機1機ごと、つまり機体ごとにユニークなACAS信号電波/航空機個体識別符号と異なり、スコークコードは飛行ごとに管制から割り当てられるものであって、割り当て方は管制ルールに基づいて行われるので、その管制ルールから軍用機や民間機の区別を推定することも可能である。
【0016】
なお、航空機が使用可能な電波や信号であれば、上記の例に限定されない。例えば、直線的に伝播し、かつ目標を鮮明に分離できる1GHz以上のマイクロ波等の任意の電波や信号を用いることが可能である。また、上記に示した電波や信号は、組合わせて使用することも可能である。
また、電波が対地高度測定用電波(電波高度計電波)の場合、電波高度計受信装置は、測定目的に応じて周波数掃引用又はパルス用のどちらか一方だけ設置することも可能である。例えば、民間航空機に限定し軍用機は測定対象から除外したい測定であれば、4.3GHzの周波数掃引信号電波受信装置だけ備えればよい。
また、4.3GHz帯域の周波数掃引信号用及びパルス信号用の両方の受信装置を設置する場合、受信アンテナは共通化し、検波回路以降のみを周波数掃引用とパルス用とで別系統とすることもできる。
【0017】
(実施の形態2)航空機の識別方法を用いた航空機騒音の測定
実施の形態1に記載した航空機の識別方法を用いて、航空機の接近を検知した場合に航空機騒音の測定における騒音測定開始の際のトリガーとする。電波信号は、上記したような無指向性や水平方向又は鉛直方向への有指向性といった任意の電波や信号を用いることが可能である。
放射する電波が例えば下方向に指向性を持つ場合には、伝搬速度が速い電波のピークが観測されたすぐ直後に最大騒音レベルが観測される。また、真下には指向性が無く推進方向に指向性があるものもある。このような受信パターンの特徴を利用することによって、騒音の発生を予測して騒音測定のトリガーに用いてもよい。トリガーとして用いる電波信号は、具体的には、対空・対地走査電波や気象レーダ信号等ように水平方向に指向性を持ち、航空機の接近と共に緩やかにその電界強度信号が上昇するものであってもよいし、対地高度測定用電波のように直下方向に指向性を持ち航空機が直上を通過する直前に電界強度レベルが急上昇するものであってもよい。
さらに、騒音測定開始の際のトリガーと連動して、騒音測定に関連する動作を行う。例えば、騒音の録音開始、ビデオ録画開始、起動に時間がかかる機器の立ち上げ、航空機の接近に際しての測定員の注意を喚起等の航空機騒音測定に関連する操作等が動作としてあげられる。
特に、航空機騒音の測定において騒音を録音する場合には、常時録音を行うよりも航空機騒音が生じている時に限定して録音を行うことは、騒音測定の効率を高めて、記憶領域等の節約になるだけでなく、聴取範囲を少なくすることが出来るので、データ整理の省力化が可能となる。
【0018】
(実施の形態3)航空機の識別方法を用いた航空機騒音の判定
実施の形態1に記載した航空機の識別方法を用いて、PCT/JP2008/058825で開示されている統計処理手法を用いた信号判定を行う。この信号判定は、測定/分析対象の予測モデル式に音源未知データを入力し、出力値を音源未知データが測定/分析対象であるかの確率値として得るものである。ここで予測モデル式を作成するためには、音源既知データとして測定されて分析区間が切り出された信号強度の時系列データを必要とする。
実際の航空機騒音の自動測定では、如何に航空機の騒音だけを抽出するかが重要となるが、実際の現場では、航空機だけでなく自動車、鉄道、工場、鳥や犬、その他様々な生活騒音が混在する。そのような環境で、人間のように目や耳を持たない機械が、騒音計が出力する騒音レベルのデジタル情報のみによって、航空機の騒音だけを抽出し測定することは困難であるが、本発明の識別方法を用いた信号判定を行うことにより高い精度で航空機騒音だけを抽出して測定することが可能になる。
具体的には、本実施の形態1で示す航空機の識別方法で識別された、航空機が放射する特有の電波の性状から演算処理して取得したデータを、測定/分析対象の予測モデル式に使用する音源既知データとして用いる。そして、音源未知データが航空機音であるか否か、さらに詳細に軍用機音であるか民間機音であるか否かも確率値として算出する。
【実施例】
【0019】
(実施例1)航空機騒音と電波電界強度測定例(軍用機)
航空機騒音又は航空機の飛行経路、飛行高度、飛行回数等の把握をするための測定をするために、米海軍と海上自衛隊が共同利用している神奈川県厚木飛行場の北側、約1.5km地点に測定点を設け、騒音計と共に4.3GHz帯周波数掃引電波、同4.3GHz帯パルス電波、9GHz帯周波数掃引電波、同9GHz帯パルス電波の各受信装置を設置し、電波受信信号を図1に示した回路を介し、それぞれの電界強度レベルがコンピュータに入力及び記録される。
軍用機の航空機騒音及び電波高度計電波電界強度測定例を図2に示す。周波数掃引方式の電波高度計電界強度レベルFS、パルス方式の電波高度計電界強度レベルP、及び騒音レベル変動NLを示す。設定条件を満たし自動測定器に最大騒音レベルと発生時刻が記録されたデータを○印で示す。
以下に、2007年1月19日の9:00〜9:22の間における実際の軍用機の離陸時における自動測定結果のデータ及び空港近傍での目視及びエアバンド聴取情報を示す。
(1)9:00頃に米海軍C−40Aが離陸する。なお、C−40Aは、民間機のB737−700型機を軍事転用している。自動測定では、最大80.0dBの騒音レベル変動NLと共に周波数掃引FS及びパルスPの両方の電波が検出される。
(2)9:03頃に海上自衛隊US−1Aが離陸する。自動測定では、最大76.9dBの騒音レベル変動NLと共にパルスPの電波のみが検出される。
(3)9:11頃に米海軍F/A−18F(スーパーホーネット)が離陸する。自動測定では、最大107.1dBの騒音レベル変動NLと共にパルスPの電波のみが検出される。
(4)9:16頃に米海軍F/A−18F(スーパーホーネット)が2機連続して離陸する。自動測定では、最大104.5dBの騒音レベル変動NLと共に各々のパルスPの電波のみが検出される。
(5)9:20頃に海上自衛隊P−3Cが離陸する。自動測定では、最大90.5dBの騒音レベル変動NLと共にパルスPの電波が検出される。
上記のように、離陸情報とほぼ時間が一致して、騒音レベル変動NLと同時に特徴的な急激な値の変化がパルス方式の電波高度計電界強度レベルPで観察される。従って、本発明を用いることによって、軍用機の航空機の自動識別が可能であることが示される。
【0020】
(実施例2)航空機騒音と電波電界強度測定例(民間機)
実施例1と同様の手法を用いて、民間機の航空機騒音及び電波高度計電波電界強度測定例を図3に示す。周波数掃引方式の電波高度計電界強度レベルFS及び騒音レベル変動NLが記録される。
以下に、2007年2月11日の20:04〜20:26の間における実際の民間機の離陸時における自動測定結果のデータ及び空港近傍での目視及びエアバンド聴取情報を示す。
(6)20:06〜20:08に民間機B777−200型機が上空をハイパス通過する。自動測定では、騒音レベル変動NLのピークと共に周波数掃引FSの電波が検出される。
(7)20:10〜20:12に民間機B767−300型機が上空をハイパス通過する。自動測定では、騒音レベル変動NLのピークと共に周波数掃引FSの電波が検出される。
(8)20:21〜20:23に民間機A320−200型機が上空をハイパス通過する。自動測定では、騒音レベル変動NLのピークと共に周波数掃引FSの電波が検出される。
上記のように、上空ハイパス通過情報とほぼ時間が一致して、騒音レベル変動NLと同時に特徴的な急激な値の変化が周波数掃引方式の電波高度計電界強度レベルFSで観察される。従って、本発明を用いることによって、民間機の航空機の自動識別が可能であることが示される。
【0021】
(実施例3)航空機騒音と電波電界強度測定例(民間機及び軍用機)
実施例1と同様の手法を用いて、民間機及び軍用機の航空機騒音及び電波高度計電波電界強度測定例を図4に示す。周波数掃引方式の電波高度計電界強度レベルFS、4.3GHzのパルス方式の電波高度計電界強度レベルP(4.3G)、9GHz帯のパルス方式の対空・対地走査電波電界強度レベルP(9G)、及び騒音レベル変動NLが記録される。設定条件を満たし自動測定器に最大騒音レベルと発生時刻が記録されたデータを○印で示す。
以下に、2007年1月19日の9:40〜9:50の間における実際の航空機の離陸時における自動測定結果のデータ及び空港近傍での目視及びエアバンド聴取情報を示す。
(9)9:40頃に米海軍C−9が離陸する。なお、C−9は、民間機のDC−9型機を軍事転用している。自動測定では、最大94.6dBの騒音レベル変動NLと共に周波数掃引FSの電波のみが検出される。また、パルス電波等は検出されない。
(10)9:43頃に米海軍F/A−18C(ホーネット)2機編隊が続けて離陸する。自動測定では、最大106.9dBの騒音レベル変動NLと共に各々の4.3GHz帯パルス電波P(4.3G)と9GHz帯パルス電波P(9G)の両方が検出される。
(11)9:48頃に米海軍EA−6B(プラウラー)が離陸する。自動測定では、最大108.8dBの騒音レベルNL変動と共に4.3GHzパルス電波P(4.3G)のみが検出される。また、9GHz帯のパルス電波等は検出されない。
上記のように、離陸情報とほぼ時間が一致して、騒音レベル変動NLと同時に特徴的な急激な値の変化が民間機(軍用機に転用される場合を含む)の場合は4.3GHz帯周波数掃引方式の電波高度計電界強度レベルFSが測定され、一方、軍用機の場合は4.3GHz帯パルス方式の電波高度計電界強度レベルP(4.3G)及び/又は9GHz帯パルス方式の対空・対地走査電波電界強度レベルP(9G)が測定される。従って、本発明を用いることによって、同時に観測された騒音レベルのピークの発生源がそれぞれ民間機又は軍用機であることが識別可能となり、民間機及び軍用機を含めた航空機の自動識別を同時に行うことも可能であることが示される。
【0022】
(実施例4) 識別性能
自動測定及び受信した電波の状況をデータにすると共に、測定員による空港近傍での目視及びエアバンド聴取情報目視観測を行い、航空機の識別性能の確認を行った。測定結果の一覧表を図5(2007年1月18日の測定例)及び図6(2007年1月19日の測定例)に示す。
自動測定結果として、自動測定器に最大騒音レベルが記録された騒音発生時刻毎に騒音レベル(dB)及び一定以上の騒音が継続した時間(秒)を示す。騒音継続時間は、現場ごとの状況に合わせて閾値を設定する。例えば、民間機のように飛行速度が遅い場合は長く、軍用機の場合は短く設定する。また、航空機までの距離が離れていると見かけ上の移動速度が遅くなるので、このような場合は軍用機であっても継続時間は長めに設定する。そして、現場ごとに航空機騒音を取りこぼさないように、更に可能であれば継続時間が短い自動車やバイクの通過騒音を取り込まないように設定する。
また、単機/編隊の別も示す。単機もしくは編隊は、目視で確認又はエアバンドを全て録音して推定する。
さらに、受信した電波の状況として、1090MHzで表すトランスポンダ応答信号、4.3GHz C/Wで表す4.3GHzの周波数掃引信号、4.3GHz Pulseで表す4.3GHzのパルス信号を示す。
さらに、上記の自動測定と同時に、空港での目視及びエアバンド聴取情報を収集し、離着陸時刻毎に情報と自動測定とを対応付けて示す。使用滑走路は、北:北向きの滑走路(北向きに離陸又は北向きに着陸する)、南:南向きの滑走路(南向きに離陸又は南向きに着陸する)を示す。また、離着陸の別の記号は、T:離陸機、L:着陸機、TG:タッチ・アンド・ゴー(艦載機の空母着艦訓練の一種で、着陸態勢から着地すると同時に離陸する飛行形態)、GA:ゴー・アラウンド(着陸態勢から着地せず離陸に移る飛行形態)、LP:ランディング・パス(着陸に先立ち、滑走路上空を高高度で一度通過する飛行形態)を示す。また、コールサインは航空機の無線電波の呼び出し符号を示す。また、機種は測定した航空機の機種を示す。
【0023】
図5のNo.25,26,47,89−91,99,101,106,108,119及び図6のNo.6,18,38,63,76では、トランスポンダ応答信号(1090MHz)が検出されない。これは、特許1750374号で示した従来技術では、軍用機を含む全ての航空機を識別することは不可能であることを示す。しかしながら、本発明の方法を用いることによって、漏れなく全ての航空機を識別することが可能となる。
このように、軍用航空機が編隊を組んでいる場合には、その内の1機のみしかトランスポンダ応答信号を発信しない場合等があり、全ての軍用機がトランスポンダ応答信号を発信する訳ではない。これは、例えば、飛行場近くまでは編隊で飛行し旋回時に編隊を解消し1機ごとに着陸、或いはその反対に1機ごとに離陸し上空で編隊になる場合には、トランスポンダ応答信号電波に着目する識別方法だけでは、トランスポンダ応答信号を発していない軍用機通過時の騒音を誤って航空機以外の騒音として識別して、取りこぼす問題があったが、本発明を用いることにより正確に軍用機として識別することが可能になる。
【0024】
図5のNo.5,7,20及び図6のNo.2,11,72以外の飛行機では、4.3GHzの周波数掃引信号が検出されない。これは、特許3699705号で示した従来技術では、軍用機を含む全ての航空機を識別することは不可能であることを示す。しかしながら、本発明の方法を用いることによって、漏れなく全ての航空機を識別することが可能となる。
【0025】
さらに、図5及び図6の測定結果をまとめて図7に示す。軍用機の自動識別機数とは、騒音と同時に4.3GHz帯パルス信号を受信できた機数である。また、民間機の自動識別機数とは、騒音と同時に4.3GHz帯周波数掃引信号を受信できた機数である。図7に示すように、本実施例の自動測定結果は、軍用機及び民間機型軍用機ともに識別率が100%である。
このように、本実施例において、延べ234機の測定において全く取りこぼしなく完璧に民間機及び/又は軍用機と識別できたということは、本発明の航空機の自動識別方法の有用性が高いことを裏付ける。
【0026】
(実施例5)実測データ
横田基地周辺におけるACAS信号電波/航空機個体識別符号発信の有無の実測データを示す。調査場所は瑞穂町南平(横田基地滑走路北端側方)であり、調査期間は2007年9月15日から11月14日である。
実測データを図8に示す。民間機及び軍用機(米軍及び自衛隊)、さらに、軍用機は戦闘機、輸送機、ヘリコプターの別についてのACAS信号電波/航空機個体識別符号発信の有無及び個体識別符号発信機の割合を示す。
すると、(*1)より、調査期間中の2ヶ月間に横田基地を離着陸した民間機は、100%がACAS信号電波/航空機個体識別符号を発信している。また、(*2)より、軍用機は、ACAS信号電波/航空機個体識別符号を発信している機体と、発信していない機体が混在している。なお、発信している軍用機については、航空機情報データベースと照合することで軍用機及び民間機の識別、さらには航空機の機種自体の識別が可能である。
【0027】
(実施例6)航空機情報データベース
航空機情報データベースとして使用する例を以下に示す。民間機における航空機情報データベースの例を図9に示す。軍用機における航空機情報データベースの例を図10に示す。個体識別符号を発信していない航空機における航空機情報データベースの例を図11に示す。
このように、予め、個体識別符号、機種、航空会社、所属、分類等を航空機情報データベースに登録しておき、受信した個体識別符号を用いて航空機情報データベースの検索を行い、各航空機の機種の識別をする。
【0028】
(実施例7)スコークコードの割り当てルール
スコークコードの割り当てルールの例を以下に示す。レーダ管制機関別に割り当てられたスコークコードを図12に示す。IFR機(計器飛行する航空機)において、国内線及び国際線航空機に割り当てられたスコークコードを図13上段に示す。また、その他の割り当てられたスコークコードを図13下段に示す。
【0029】
例えば、ローカルコード(管制空域内のみを有視界で、10,000ft未満を飛行する航空機に割り当てられるスコークコード)である場合、これはある空港を離陸し別の空港に向かう旅客機や貨物機等に割り当てられることはなく、着陸や旋回飛行訓練を行っている軍用機やヘリコプターに割り当てられている可能性が極めて高いことから、当該航空機は軍用機であると高い確度で推定できる。
同様に、横田基地周辺で5201〜5277の範囲のスコークコードが割り当てられている場合、それは横田レーダ管制機関が割り当てたスコークコードとなっているため、これも軍用機である可能性が極めて高い。一方、国内線及び国際線航空機にはそれぞれスコークコードの範囲が決まっていることから、その範囲にあるものは民間機であると高い確度で推定できる。
【0030】
また、ACAS信号電波/航空機個体識別符号やMode−AのスコークコードとMode−Cの飛行高度(気圧高度)情報を併用することで軍用機及び民間機の識別確度をさらに高めることも可能である。
すなわち、Mode−Cから飛行する航空機の時々刻々の高度を把握することができるので、上空を複数の空域が重畳している場合に、当該航空機がどの空域を飛行しているかを判別することができる。
例えば、横田基地周辺の上空は、エリアによっても異なるが、地上から8,000ftまでが横田空域で、8,000ftより上が民間機に割り当てられている。したがって、同基地周辺で航空機騒音の自動測定を行っている場合には、8,000ft以下を飛行する軍用機と8,000ftより上を飛行する民間機の両方の騒音が観測されるが、Mode−C気圧高度から当該航空機が飛行している空域が判別できるため、軍用機・民間機の識別が可能となる。
また、同様に、木更津基地周辺では、羽田空港に着陸する又は羽田空港を離陸した航空機は3,000ft以上を飛行し、同基地の航空機やヘリコプターは3,000ft以下を飛行することになっているので、受信した気圧高度から軍用機及び民間機の識別が可能である。
【0031】
なお、一般的な航空機騒音の評価は、飛行場毎に行われている。これは、飛行場計画段階で行われる環境アセスメントでは、その飛行場の影響を予測しているため、事前事後の影響をアセスメント段階と比較をする上でも飛行場ごとの評価が必要となるからである。
そこで、本発明を用いることによって、複数の飛行場の空域が重なる地域で測定を行う場合においても、民間機及び軍用機に関わらず、全ての航空機騒音の発生源を特定することが可能となる。上述したように、航空機騒音は民間機及び軍用機に関わらず、自動測定が有効であるため、トランスポンダ応答信号等に含まれている機体識別情報を組合わせて解析することによって、空港の近傍で同様に測定した機体識別情報とを照合することによって騒音を発した航空機が離着陸した飛行場をも特定することも可能になる。
【0032】
実際に現在、国内には数多くの空港や飛行場が建設され、航空機騒音が問題となる場所では複数の空港・飛行場の離着陸機が錯綜して飛行する場所が多くなってきている。また、既に軍用機と民間機が共同利用している飛行場も多いが(名古屋空港、那覇空港、新千歳空港、三沢空港、米子空港等)、今後、軍用飛行場を民間飛行場として利用することが検討される飛行場も多い(米軍横田基地、航空自衛隊百里基地)。これより、本発明を用いることによって精度高く軍用機を含めた全航空機騒音を識別すること、及び/又は軍用機と民間機の区別が可能になり、空港・飛行場周辺の騒音測定の自動化が可能となるだけでなく、軍用機・民間機それぞれの騒音影響を区別して把握・評価することも可能となる。
【0033】
なお、上記実施の形態の構成、解析及び測定は例であって本発明の趣旨を逸脱しない範囲で適宜組合わせ及び変更できることは言うまでもない。
特に、航空機以外にも自動車や船舶等の各種乗り物、電子機器、家電製品、工場、施設等が放射する電波を用いて、対象物の自動識別測定をすることに応用することもできる。
【図面の簡単な説明】
【0034】
【図1】本実施の形態の航空機の識別装置の構成図である。
【図2】航空機騒音と電波高度計電波電界強度測定例(軍用機)を示した図である。
【図3】航空機騒音と電波高度計電波電界強度測定例(民間機)を示した図である。
【図4】航空機騒音と電波高度計電波電界強度測定例(民間機及び軍用機)を示した図である。
【図5】識別性能を示した一覧図(2007年1月18日)である。
【図6】識別性能を示した一覧図(2007年1月19日)である。
【図7】識別性能を示した図である。
【図8】横田基地周辺における実測データを示した図である。
【図9】航空機情報データベース例(民間機)を示した図である。
【図10】航空機情報データベース例(軍用機)を示した図である。
【図11】航空機情報データベース例(個体識別符号を発信していない航空機)を示した図である。
【図12】スコークコード(管制機関別)の割り当てルールを示した図である。
【図13】スコークコード(IFR機・その他)の割り当てルールを示した図である。
【符号の説明】
【0035】
1 航空機の識別装置
11 受信アンテナ
12 高周波増幅回路
13 バンドパスフィルタ
14 局部発振回路
15 周波数変換回路
16 中間周波増幅回路
17 検波回路
18 積分回路
19 高速AD変換器
20 コンピュータ
21 記録媒体
22 通信装置
FS 電波高度計電界強度レベル(周波数掃引)
P 電波高度計電界強度レベル(パルス)
P(4.3G) 電波高度計電界強度レベル(4.3GHz帯パルス)
P(9G) 対空・対地走査電波電界強度レベル(9GHz帯パルス)
NL 騒音レベル変動
○印 設定条件を満たし自動測定器に最大騒音レベルと発生時刻が記録されたデータ
【特許請求の範囲】
【請求項1】
航空機の識別方法であって、
航空機から放射された電波を受信する電波受信工程と、
前記電波を検波する検波工程と、
該検波工程から出力されるアナログ信号をデジタル信号に変換するA/D変換工程と、 該A/D変換工程によって変換されたデジタル信号を解析し、電波の変調方式及び/又は偏波面の違いによって前記航空機の識別を行う演算処理工程と、
該演算処理工程による演算処理結果を記録する記録工程と
を備えたことを特徴とする航空機の識別方法。
【請求項2】
前記航空機の識別は、軍用機もしくは民間機の識別であること
を特徴とする請求項1に記載の航空機の識別方法。
【請求項3】
前記変調方式の違いは、周波数掃引又はパルスの変調方式の違いであること
を特徴とする請求項1又は2に記載の航空機の識別方法。
【請求項4】
前記電波は電波高度計電波、対空・対地走査電波、気象レーダ信号、敵味方識別信号、及び/又はトランスポンダ応答信号であること
を特徴とする請求項1乃至3の何れかに記載の航空機の識別方法。
【請求項5】
前記電波の周波数帯域は、4.2〜4.4GHz帯及び/又は8.0〜10.0GHz帯であること
を特徴とする請求項1乃至4の何れかにに記載の航空機の識別方法。
【請求項6】
前記トランスポンダ応答信号に含まれるACAS信号電波の航空機個体識別符合、スコークコード、及び/又は気圧高度を用いて航空機の識別を行うことを特徴とする請求項1乃至5の何れかにに記載の航空機の識別方法。
【請求項7】
前記航空機の識別は、航空機情報データベースと照合して行うことを特徴とする請求項1乃至6の何れかにに記載の航空機の識別方法。
【請求項8】
請求項1乃至7の何れかに記載の航空機の識別方法で識別された識別データを用いて、航空機騒音の発生源を特定すること
を特徴とする航空機騒音の測定方法。
【請求項9】
請求項1乃至7の何れかに記載の航空機の識別方法で識別された識別データを航空機騒音の測定開始トリガーとすること
を特徴とする航空機騒音の測定方法。
【請求項10】
前記測定開始トリガーは、水平方向及び/又は下向に指向放射されている電波の電界強度レベル及び/又は電波から得られた識別データを用いること
を特徴とする請求項9に記載の航空機騒音の測定方法。
【請求項11】
コンピュータにより騒音/分析対象を判定する信号判定方法であって、
騒音又は振動に係る測定/分析対象のモデルは、請求項1乃至7に記載された航空機の識別方法で識別されたデータを用いて作成し、
測定/分析対象であるかが未知の未知データを入力し、
前記測定/分析対象のモデルの出力値を、前記未知データが測定/分析対象であるかの確率値として得る
ことを特徴とする信号判定方法。
【請求項12】
航空機の識別装置であって、
航空機から放射された電波を受信する電波受信手段と、
前記電波を検波する検波手段と、
該検波手段から出力されるアナログ信号をデジタル信号に変換するA/D変換手段と、 該A/D変換手段によって変換されたデジタル信号を解析し、電波の変調方式及び/又は偏波面の違いによって前記航空機の識別を行う演算処理手段と、
該演算処理手段による演算処理結果を記録する記録手段と
を備えたことを特徴とする航空機の識別装置。
【請求項1】
航空機の識別方法であって、
航空機から放射された電波を受信する電波受信工程と、
前記電波を検波する検波工程と、
該検波工程から出力されるアナログ信号をデジタル信号に変換するA/D変換工程と、 該A/D変換工程によって変換されたデジタル信号を解析し、電波の変調方式及び/又は偏波面の違いによって前記航空機の識別を行う演算処理工程と、
該演算処理工程による演算処理結果を記録する記録工程と
を備えたことを特徴とする航空機の識別方法。
【請求項2】
前記航空機の識別は、軍用機もしくは民間機の識別であること
を特徴とする請求項1に記載の航空機の識別方法。
【請求項3】
前記変調方式の違いは、周波数掃引又はパルスの変調方式の違いであること
を特徴とする請求項1又は2に記載の航空機の識別方法。
【請求項4】
前記電波は電波高度計電波、対空・対地走査電波、気象レーダ信号、敵味方識別信号、及び/又はトランスポンダ応答信号であること
を特徴とする請求項1乃至3の何れかに記載の航空機の識別方法。
【請求項5】
前記電波の周波数帯域は、4.2〜4.4GHz帯及び/又は8.0〜10.0GHz帯であること
を特徴とする請求項1乃至4の何れかにに記載の航空機の識別方法。
【請求項6】
前記トランスポンダ応答信号に含まれるACAS信号電波の航空機個体識別符合、スコークコード、及び/又は気圧高度を用いて航空機の識別を行うことを特徴とする請求項1乃至5の何れかにに記載の航空機の識別方法。
【請求項7】
前記航空機の識別は、航空機情報データベースと照合して行うことを特徴とする請求項1乃至6の何れかにに記載の航空機の識別方法。
【請求項8】
請求項1乃至7の何れかに記載の航空機の識別方法で識別された識別データを用いて、航空機騒音の発生源を特定すること
を特徴とする航空機騒音の測定方法。
【請求項9】
請求項1乃至7の何れかに記載の航空機の識別方法で識別された識別データを航空機騒音の測定開始トリガーとすること
を特徴とする航空機騒音の測定方法。
【請求項10】
前記測定開始トリガーは、水平方向及び/又は下向に指向放射されている電波の電界強度レベル及び/又は電波から得られた識別データを用いること
を特徴とする請求項9に記載の航空機騒音の測定方法。
【請求項11】
コンピュータにより騒音/分析対象を判定する信号判定方法であって、
騒音又は振動に係る測定/分析対象のモデルは、請求項1乃至7に記載された航空機の識別方法で識別されたデータを用いて作成し、
測定/分析対象であるかが未知の未知データを入力し、
前記測定/分析対象のモデルの出力値を、前記未知データが測定/分析対象であるかの確率値として得る
ことを特徴とする信号判定方法。
【請求項12】
航空機の識別装置であって、
航空機から放射された電波を受信する電波受信手段と、
前記電波を検波する検波手段と、
該検波手段から出力されるアナログ信号をデジタル信号に変換するA/D変換手段と、 該A/D変換手段によって変換されたデジタル信号を解析し、電波の変調方式及び/又は偏波面の違いによって前記航空機の識別を行う演算処理手段と、
該演算処理手段による演算処理結果を記録する記録手段と
を備えたことを特徴とする航空機の識別装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】

【図10】
【図11】
【図12】

【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2010−44031(P2010−44031A)
【公開日】平成22年2月25日(2010.2.25)
【国際特許分類】
【出願番号】特願2008−221826(P2008−221826)
【出願日】平成20年8月29日(2008.8.29)
【出願人】(390029023)日東紡音響エンジニアリング株式会社 (19)
【Fターム(参考)】
【公開日】平成22年2月25日(2010.2.25)
【国際特許分類】
【出願日】平成20年8月29日(2008.8.29)
【出願人】(390029023)日東紡音響エンジニアリング株式会社 (19)
【Fターム(参考)】
[ Back to top ]