
航空機の電気ブレーキシステムのための自動ブレーキインターロック
航空機のための電気自動ブレーキインターロックシステムは、ブレーキの不用意な(命令されていない)適用を防止する自動ブレーキ電力インターロックメカニズムを含む。自動ブレーキ電力インターロックは、自動ブレーキ作動データが正当な自動ブレーキ適用条件を示さない際はいつでも、ブレーキアクチュエータから動作電力を取除く。インターロック処理は、不用意な自動ブレーキコマンドが生成された場合でも、ブレーキアクチュエータが当該不用意な自動ブレーキコマンドに基づき動作することができないように自動ブレーキコマンド処理と並行して行なわれる。この点において、ブレーキアクチュエータは、以下の2つの動作が同時に起こらないならば、ブレーキを自動的に適用することができない。すなわち、動作電力が、電気ブレーキアクチュエータを有効にするよう与えられる場合と、正当な自動ブレーキ適用条件に応答して自動ブレーキ作動制御が命令される場合とである。

【発明の詳細な説明】
【技術分野】
【0001】
この発明の実施例は一般的に航空機のための電気ブレーキシステムに関する。より詳細には、この発明の実施例は航空機の電気ブレーキシステムのための自動ブレーキインターロックシステムに関する。
【背景技術】
【0002】
背景
多くの航空機は、直結ケーブルまたは油圧制御アーキテクチャにより制御されるブレーキメカニズムを有するブレーキシステムを用いる。現代の航空機では、従来のケーブル作動および油圧作動の航空機ブレーキシステムが、電気作動および電気制御されるブレーキシステムに取って代わられ始めている。航空機のブレーキシステムは、不用意なブレーキ(すなわち、パイロットまたは自動化された航空機システムからの正当なブレーキコマンドがない状態でのブレーキの適用)を防止する安全機能を有するよう設計されるべきである。さらに、航空機のブレーキシステムは、信頼性のあるブレーキの制御および堅牢性を提供するよう、十分な処理の冗長性を含むべきである。
【発明の概要】
【発明が解決しようとする課題】
【0003】
簡潔な概要
【課題を解決するための手段】
【0004】
航空機とともに用いるのに好適な電気自動ブレーキインターロックシステムは、車輪にブレーキをかけることを管理する電気ブレーキアクチュエータに動作電力が与えられるかどうかを制御する自動ブレーキインターロック構成を含む。自動ブレーキインターロック構成は、ブレーキメカニズム制御信号を生成するソフトウェアベースのコマンドアーキテクチャと並列のブレーキメカニズムのための動作電力を調整するハードウェアベースの電力制御アーキテクチャを含む。1つの実施例では、複数のこのようなインターロック構成が独立した態様で複数の車輪ブレーキ(または複数の車輪ブレーキのグループ)のために用いられ、これにより信頼性および堅牢性を提供する。この電気自動ブレーキインターロックシステムは、スロットルレゾルバ角度(TRA)データを用いて、自動ブレーキの適用を有効/無効にするよう自動ブレーキインターロックを駆動する。TRAデータは、航空機のエンジンによって用いられ、航空機のデジタル通信システム上にて入手可能である。実際では、自動ブレーキの設計は、すでに飛行機上に存在しているネットワークアーキテクチャを用いてもよい(自動ブレーキ使用のために専用に加えられるデータ転送設計要素が加えられなくてもよい)。
【0005】
この発明の上記および他の局面は、1つの実施例において、航空機の電気自動ブレーキインターロックシステムのための制御構成によって実施されてもよい。制御構成は、自動ブレーキ入力信号を処理するとともに電気ブレーキシステムのブレーキ作動のための動作電力を有効/無効にするよう構成されるアクチュエータ電力制御アーキテクチャを含む。制御構成はさらに、アクチュエータ電力制御アーキテクチャと並列の自動ブレーキコマンドアーキテクチャを含む。自動ブレーキコマンドアーキテクチャは、自動ブレーキ入力信号を処理するとともに、電気ブレーキシステムのための自動ブレーキ作動データに応答してブレーキ作動制御コマンドを生成するよう構成される。アクチュエータ電力制御アーキテクチャは、自動ブレーキコマンドアーキテクチャから独立して、ブレーキの作動を防止することが可能である。逆に、自動ブレーキコマンドアーキテクチャは、アクチュエータ電力制御アーキテクチャから独立して、ブレーキの作動を防止することが可能である。
【0006】
この発明の上記および他の局面は、別の実施例において、航空機の電気ブレーキシステムのための自動ブレーキインターロックを提供するための方法によって実施されてもよい。この方法は、自動ブレーキ作動データを受取ることと、当該自動ブレーキ作動データを処理することと、自動ブレーキ作動データが自動ブレーキ適用条件を示さない場合、ブレーキメカニズムのための動作電力を調節して一時的にブレーキメカニズムを無効にすることとを伴う。この電力制御スキームと同時および独立して、この方法は、自動ブレーキ作動データを処理し、自動ブレーキ作動データが自動ブレーキ適用条件を示していない場合、当該方法はブレーキの作動メカニズムを妨げる。この方法は、以下の2つの動作が同時に起きた場合、ブレーキメカニズム、特に電気ブレーキアクチュエータのための作動制御を与える。すなわち、動作電力が電気ブレーキアクチュエータを有効にするよう与えられることと、正当な自動ブレーキ適用条件に応答して、ブレーキ作動制御が命令されることとである。
【0007】
この発明の上記および他の局面は、別の実施例において、航空機のための電気自動ブレーキインターロックシステムによって実施されてもよい。電気自動ブレーキインターロックシステムは、航空機の車輪のためのブレーキメカニズムと、ブレーキメカニズムに結合される自動ブレーキ制御アーキテクチャとを含む。自動ブレーキ制御アーキテクチャは、自動ブレーキ作動データに応答して、ブレーキメカニズム、特に電気ブレーキアクチュエータのためのブレーキメカニズムコマンド信号を生成するよう構成される自動ブレーキコマンド制御部と、自動ブレーキ作動データに応答して、ブレーキメカニズム、特に電気ブレーキアクチュエータのための動作電力を調節するよう構成されるインターロックメカニズムとを含む。インターロックメカニズムは、自動ブレーキコマンド制御部の動作と同時に、かつ自動ブレーキコマンド制御部から独立して動作する。
【0008】
この概要は、詳細な説明において以下にさらに記載される簡略された形態で概念の選択したものを紹介するよう与えられる。この概要は、特許請求された主題の主となる特徴または必須の特徴を特定することを意図するものではなく、特許請求された主題の範囲を決定する助けとなるものとして用いられることも意図しない。
【図面の簡単な説明】
【0009】
この発明のさらに完全な理解は、添付の図面に関連して考慮し、詳細な説明および特許請求の範囲を参照することにより導き出され得る。図面を通じて、同様の参照番号は同様の要素を指す。
【図1】航空機電気ブレーキシステムの概略図である。
【図2】航空機電気ブレーキシステムの独立した処理チャネルを示す図である。
【図3】航空機電気ブレーキシステムの部分の概略図である。
【図4】航空機電気ブレーキシステムの部分のための電気自動ブレーキインターロックシステムの概略図である。
【図5】航空機電気自動ブレーキインターロックシステムのための自動ブレーキインターロック処理を示すフローチャートの図である。
【発明を実施するための形態】
【0010】
詳細な説明
以下の詳細な説明は、単に説明的な性質のものであり、この発明の実施例またはこのような実施例の適用および利用を制限することを意図するものではない。さらに、前述の技術分野、背景、簡潔な概要、または以下の詳細な説明において提示される如何なる明確なまたは示唆される理論によって束縛されることを意図しない。
【0011】
ここで、この発明の実施例は、機能および/または論理ブロックコンポーネントならび
にさまざまな処理ステップの点において記載され得る。このようなブロックコンポーネントは、特定された機能を実行するよう構成される任意の数のハードウェア、ソフトウェア、および/またはファームウェアコンポーネントによって実現されてもよい。たとえば、この発明の実施例は、1つ以上のマイクロプロセッサまたは他の制御装置の制御の下でさまざまな機能を実行し得るさまざまな集積回路コンポーネント、たとえばメモリ要素、デジタル信号処理要素、論理要素、またはルックアップテーブルなどを用いてもよい。さらに、当業者ならば、この発明の実施例が、さまざまな異なる航空機ブレーキシステムおよび航空機の構成に関連して実施され得るということと、ここに記載されるシステムが単にこの発明の例示的な一実施例であるということとを理解するであろう。
【0012】
簡潔さのため、信号処理、航空機のブレーキシステム、ブレーキシステム制御、およびシステムの他の機能的な局面(ならびにシステムの個々の動作コンポーネント)に関連付けられる従来の技術およびコンポーネントはここでは詳細に説明されない場合がある。さらに、ここに含まれるさまざまな図面において示される接続線は、さまざまな要素の間の例示的な機能的関係および/または物理的結合を示すよう意図される。なお多くの代替的もしくは付加的な機能的関係または物理的接続がこの発明の実施例において存在してもよい。
【0013】
以下の説明では、ともに「接続」または「結合」されている要素、ノード、または機構を参照する。ここで用いられるように、明らかに別のように述べていなければ、「接続される」は、1つの要素/ノード/機構が別の要素/ノード/機構に、必ずしも機械的ではなく直接的に接合(または直接的に連通)されることを意味する。同様に、明らかに別のように述べられてなければ、「結合される」は、1つの要素/ノード/機構が、別の要素/ノード/機構に、必ずしも機械的ではなく直接的もしくは間接的に接合(または直接的もしくは間接的に連通)されるということを意味する。したがって、図1−図3は要素の例示的な構成を示すが、付加的な仲介要素、装置、機構、またはコンポーネントがこの発明の実施例に存在してもよい。
【0014】
ここで記載される航空機は、メインの航空機バッテリのような任意の好適な電源または航空機のエンジンが動作している間に動作可能であるアクティブな航空機電源によって電力が与えられ得る電気ブレーキシステムを用いる。先進的な飛行機では自動ブレーキが用いられる。自動ブレーキは、離陸または着陸の間、航空機のブレーキシステムが自動化されたシステムによって取扱わられ得るときに他のタスクを行なうことからパイロットを自由にするタイプの自動ブレーキシステムである。着陸の際、自動ブレーキにより、パイロットは、ブレーキが自動的に取扱われる間、他のシステムを監視および飛行機を制御することが可能になる。滑走路への接地の際に、航空機は自動的に車輪のブレーキを係合させる。ペダルブレーキを用いる代わりに自動ブレーキを係合させることには、閉ループブレーキ制御アルゴリズムによって均一な減速が可能になるという付加的な利点がある。ブレーキのかかる度合いは選択され得、ブレーキの適用は、航空機の抗力、逆推力装置、またはスポイラーといった他の減速要因にかかわらず、選択されたレベルで航空機が減速するように自動的に調節される。離陸の際、航空機の自動ブレーキは離陸中断(rejected takeoff;RTO)モードに設定され得る。RTO設定にある際には、航空機はあるステータスインジケータを監視し、これらのインジケータに依存してRTOブレーキを係合させる。これは、たとえば、逆推力が活性化される場合またはパイロットが両方のスロットルを「アイドル」位置に戻す場合である。電気自動ブレーキシステムは、さまざまなブレーキメカニズム制御信号を生成する自動ブレーキコマンド機構から独立したインターロック機構を含む。インターロック機構は、電気ブレーキアクチュエータから作動電力を取除くことにより航空機の自動ブレーキの不用意な適用を防止するよう好適に構成される。したがって、アクチュエータは、不用意にブレーキを適用するよう命令された場合でも、作動電力の欠如により、この不用意な自動ブレーキコマンドに対して応答することができなくな
る。同様に、作動電力がアクチュエータに供給された場合でも、自動ブレーキコマンドの欠如により、不用意にブレーキを適用することができなくなる。
【0015】
図1は、航空機のための電気ブレーキシステム100の例示的な実施例の概略図である。図1に示される例示的な実施例において、航空機は、同様に構成される左側電気ブレーキサブシステムアーキテクチャ102と右側電気ブレーキサブシステムアーキテクチャ104とを用いる。「左側」および「右側」という用語はそれぞれ、航空機の左舷および右舷を指す。実際の場合、これら2つのサブシステムアーキテクチャ102/104は、以下に記載される態様で独立して制御されてもよい。単純さのため、以下では左側電気ブレーキサブシステムアーキテクチャ102のみが詳細に記載される。以下の説明は右側電気ブレーキサブシステムアーキテクチャ104にも適用されるということが理解されるべきである。
【0016】
この例示的な実施の場合、一般的に左側電気ブレーキサブシステムアーキテクチャ102は、スロットルレバー106と、ブレーキシステム制御ユニット(brake system control unit;BSCU)110と、BSCU110に結合される機外の電気ブレーキアクチュエータ制御部(electric brake actuator control;EBAC)112と、BSCU110に結合される機内のEBAC114と、前輪116および後輪118を含む機外の車輪グループと、前輪120および後輪122を含む機内の車輪グループと、EBACに結合される電気ブレーキメカニズム(図1に示さず)と、遠隔データ集信機(参照番号132、134、136、および138)とを含む。各電気ブレーキメカニズムは、それぞれのEBACによって制御される少なくとも1つの電気ブレーキアクチュエータ(参照番号124、126、128、および130)を含む。電気ブレーキメカニズムおよび遠隔データ集信機は、左側電気ブレーキサブシステムアーキテクチャ102の各々の車輪に対応する。図1に示されてはいないが、実施例は、車輪ごとに1つより多い電気ブレーキメカニズムおよび1つより多い遠隔データ集信機を有してもよい。
【0017】
電気ブレーキシステム100は、航空機のための任意の数の電気ブレーキ構成に適用され得、電気ブレーキシステム100は説明の容易さのために単純化された態様で示される。実施される電気ブレーキシステム100の実施例は、任意の数のBSCUと、各BSCUに結合および制御される任意の数のEBACと、各車輪について(または車輪の各々のグループについて)任意の数のブレーキメカニズムとを含んでもよい。動作時には、電気ブレーキシステム100は、航空機の各車輪についてまたは任意のグループの車輪について同時にブレーキアクチュエータ制御信号を独立して生成および適用し得る。
【0018】
左側電気ブレーキサブシステムアーキテクチャ102における要素は、データ通信バスまたは任意の好適な相互接続構成もしくはアーキテクチャを用いて、ともに結合され得る。たとえば、デジタルデータ通信バスは、EBAC制御信号をBSCU110からEBACへと通信し、アクチュエータ制御信号をEBACから電気ブレーキアクチュエータ124/126/128/130などへと通信するよう構成されてもよい。簡潔にいえば、BSCU110はスロットルレバー106/142の操作に反応し、EBAC112/114が受取る制御信号を生成する。立ち代わって、EBAC112/114は、電気ブレーキメカニズム、特に、アクチュエータ124/126/128/130が受取るブレーキメカニズム制御信号を生成する。立ち代わって、電気ブレーキアクチュエータ124/126/128/130はそれぞれの車輪の回転を邪魔するまたは防止するよう作動する。これらの機構およびコンポーネントは、より詳細に以下に記載される。
【0019】
スロットルレバー106および142は、電気ブレーキシステム100に入力を与えるよう構成される。パイロットはスロットルレバー106および142を物理的に操作し、これによりスロットルレバー106および142の回転または運動(すなわち何らかの形
態の物理的入力)がなされる。たとえば、電気ブレーキシステム100(特にBSCU110)は、図4の文脈において以下に詳細に説明されるように、スラストレバーがアイドルでない場合に自動ブレーキの適用を防止するよう構成されてもよい。この物理的回転またはスロットルレゾルバ角度(throttle resolver angle;TRA)は、1つ以上のスラストレバーセンサによってその本来の位置から計測され、BSCU制御信号へと変換され、BSCU110に送られる。BSCUは、ブレーキアクチュエータ124/126/128/130について所望の自動ブレーキ条件を伝えてもよく、または図4の文脈において以下に詳細に説明されるようにブレーキアクチュエータ124/126/128/130を無効にしてもよい。
【0020】
電気ブレーキシステム100の実施例は、任意の数のBSCU110を用いてもよい。説明の容易さのため、この例では、BSCU110は1つのみ含まれる。BSCU110は、ブレーキコマンドを示すEBAC制御信号をデジタルで算出する埋込ソフトウェアを有する電子制御ユニットである。この電気的およびソフトウェアの実現例により、所与の航空機の実施に必要とされる場合、ブレーキの能力および感覚のさらに他の最適化およびカスタマイズが可能になる。
【0021】
BSCU110は、ここに記載される機能を実行するよう設計される、汎用プロセッサ、コンテントアドレス可能なメモリ、デジタル信号プロセッサ、特定用途集積回路、フィールドプログラム可能なゲートアレイ、任意の好適なプログラム可能な論理装置、離散ゲートもしくはトランジスタ論理、離散ハードウェアコンポーネント、またはそれらの任意の組合せにより実施または実行されてもよい。プロセッサは、マイクロプロセッサ、コントローラ、マイクロコントローラ、または状態機械として実現されてもよい。プロセッサはさらに、計算装置の組合せ、たとえばデジタル信号プロセッサおよびマイクロプロセッサの組合せ、複数のマイクロプロセッサ、デジタル信号プロセッサコアに連動する1つ以上のマイクロプロセッサ、または任意の他のこのような構成として実現されてもよい。一実施例では、BSCU110は、ソフトウェアをホスティングするとともに、当該ソフトウェアのための外部インターフェイスを提供するコンピュータプロセッサ(たとえばパワーPC(PowerPC)555)で実現される。
【0022】
BSCU110は、さまざまな航空機入力を監視し、ペダルブレーキ、パーキングブレーキ、自動化されたブレーキ、およびギヤ引込みブレーキといった制御機能を与えるが、これらに限定されない。さらに、BSCU110は(BACU110に対して内部または外部で生成され得る)滑り止めコマンドを組み合わせ、これによりブレーキ性能が増強される。BSCU110は、両方のスロットルレバー106/42からの入力といったような付加的なコマンド制御信号とともに、ブレーキペダル(図1には示さず)からパイロットコマンド制御信号を得る。BSCU110はさらに、遠隔データ集信機132/134/136/138から付加的な制御データ(たとえば車輪スピード、回転方向、タイヤ空気圧など)を受取ってもよい。BSCU110はその入力信号を処理し、EBAC112/114が受取る1つ以上のEBAC制御信号を生成する。実際では、BSCU110はデジタルデータバスを介してEBAC112/114にEBAC制御信号を送信する。一般化されたアーキテクチャ(図示せず)において、各BSCUは、その制御の下で、任意の数のEBACとともに用いられる独立した出力信号を生成し得る。
【0023】
この例では、BSCU110はEBAC112/114に結合される。各々のEBAC112/114は、BSCU110について上述した態様で実施、実行、または実現されてもよい。一実施例では、各々のEBAC112/114は、ソフトウェアをホスティングし、当該ソフトウェアのための外部インターフェイスを提供し、かつここに記載されるさまざまなEBAC動作を実行するよう構成される好適な処理論理を含むコンピュータプロセッサ(たとえばパワーPC555)で実現される。各EBAC112/114は、B
SCU110からEBAC制御信号を取得し、EBAC制御信号を処理し、その関連する電気ブレーキメカニズムについてブレーキメカニズム制御信号(ブレーキアクチュエータ信号)を生成する。
【0024】
なお、BSCU110およびEBAC112/114の機能は、単一のプロセッサベースの機構またはコンポーネントへと組合されてもよい。この点において、BSCU110、EBAC112、EBAC114、またはそれらの任意の組合せは、電気ブレーキシステム100のためのブレーキ制御アーキテクチャであると考えられ得る。このようなブレーキ制御アーキテクチャは、ここで記載される自動ブレーキ制御動作をサポートする好適に構成された処理論理、機能、および機構を含む。
【0025】
各車輪は関連する電気ブレーキメカニズムを含み得、各ブレーキメカニズムは1つ以上の電気ブレーキアクチュエータを含み得る。結果として、各々の車輪に対してブレーキをかけることは、電気ブレーキシステム100により独立してかつ個々に制御され得る。各電気ブレーキアクチュエータは、そのそれぞれのEBACからアクチュエータ制御信号を受取るよう好適に構成され、アクチュエータ制御信号は電気ブレーキアクチュエータの調節に影響を与える。この実施例では、電気ブレーキシステム100における各々の電気ブレーキアクチュエータはEBACに結合されるとともにEBACによって制御される。この態様でEBAC112/114は電気ブレーキアクチュエータを制御し、車輪ブレーキの適用を実行、解除、調節、およびそうでなければ制御する。この点で、EBAC112/114は、BSCU110が生成するそれぞれのEBAC制御信号に応答してブレーキ制御信号を生成する。このブレーキ制御信号は、航空機によって用いられる特定のブレーキシステムとの互換性のために好適にフォーマットおよび構成される。当業者ならば、航空機ブレーキメカニズムおよびブレーキが制御される一般的な態様に詳しく、このような公知の局面はここでは詳細には記載されない。
【0026】
左側電気ブレーキサブシステムアーキテクチャ102は、好適に構成された電気制御サブシステム140を含むかまたはそれと協働してもよい。電力制御サブシステム140は、BSCU110、EBAC112/114(および/または電気ブレーキシステム100の他のコンポーネント)に結合されてもよい。この実施例では、電力制御サブシステム140は、必要に応じて、電気ブレーキメカニズムおよび/または電気ブレーキアクチュエータのための動作電力を提供、適用、除去、切換、またはそうでなければ調節するよう好適に構成される。たとえば、電力制御サブシステム140は、EBAC112/114および/または左側電気ブレーキサブシステムアーキテクチャ102の他のコンポーネントから必要に応じて電力を取除くことができ、これにより電気ブレーキシステム100のためのインターロック機構が与えられる。以下にさらに詳細に記載されるように、電力制御サブシステム140は、左側機外および左側機内電気ブレーキコンポーネントのための動作電力を調製するよう独立した態様で機能する左側機外電力供給ユニットおよび左側機内電力供給ユニットにより実現されてもよい。
【0027】
右側電気ブレーキサブシステムアーキテクチャ104は、左側電気ブレーキサブシステムアーキテクチャ102と同様の構造を有する(共通の特徴、機能、および要素はここでは冗長となるので記載しない)。この例示的な実施の場合、図1に示されるように、右側電気ブレーキサブシステムアーキテクチャ104は、スロットルレバー106とは別個でかつ区別される右側スロットルレバー142と、BSCU146と、機内EBAC148と、機外EBAC150と、電力制御サブシステム140とは別個であるとともに区別される電力制御サブシステム152とを含む。電気ブレーキシステム100の当該2つの側は、スロットルレバー106/142の両方から自動ブレーキブレーキ作動データを受取る。代替的には、電気ブレーキシステム100の2つの側は、他の別個かつ区別されるブレーキ作動メカニズム(図1に示さず)を用いてもよい。右側電気ブレーキサブシステム
アーキテクチャ104のこれらのさまざまなコンポーネントはともに結合され、これにより左側電気ブレーキサブシステムアーキテクチャ102について上述したように動作するが、右側での処理は左側での処理と独立しているのが好ましい。
【0028】
航空機のための電気ブレーキシステムの一実施例に従うと、自動ブレーキインターロックメカニズムまたは機構が、車輪のブレーキの不用意な適用を防止するよう与えられる。当該電気ブレーキシステムにおけるシステムまたは制御メカニズムは、このような自動ブレーキインターロック機構を実現するよう設計され得る。たとえば、電気ブレーキシステム100は、電気自動ブレーキインターロックシステムをサポートするよう構成されてもよい。
【0029】
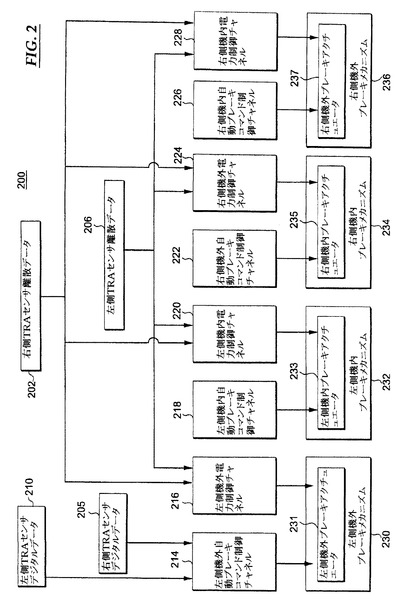
図2は、この発明の実施例に従って構成される航空機電気自動ブレーキインターロックシステムの独立した処理チャネルを示す図である。特に、図2は、左側機外電力制御チャネル216、左側機外自動ブレーキコマンド制御チャネル214、左側機内電力制御チャネル220、左側機内自動ブレーキコマンド制御チャネル218、右側機内電力制御チャネル228、右側機内自動ブレーキコマンド制御チャネル226、右側機外電力制御チャネル224、および右側機外自動ブレーキコマンド制御チャネル222を示す。これらの処理チャネルは、電気ブレーキシステム100のコンポーネント、たとえば、BSCU、EBAC、電力制御サブシステムなど、において実現されてもよい。実際には、各々の処理チャネルは、ハードウェアコンポーネント、デジタル論理要素、処理論理、回路コンポーネント、または任意の好適に構成されるアーキテクチャ、構成、もしくは機構を含んでもよいがこれらに限定されない。さらに、各処理チャネルはここに記載されるそれぞれの動作を行なうよう好適に構成される。
【0030】
この例について、左側処理チャネルは電気ブレーキシステムの左側の処理に対応し、右側処理チャネルは電気ブレーキシステムの右側の処理に対応する。この点において、左側および右側処理電力チャネルは各々、左側および右側TRAセンサ離散(ハイまたはローという2つの取り得る状態を有するバイナリ信号)データモジュール202/206によって入力を受け得る。これらのTRAセンサ離散データモジュール202/206は、自動ブレーキ作動データを左側および右側電力処理チャネルに与えるよう構成される。電気ブレーキシステムのある実施例では、左側および右側TRAデジタルデータ(バイナリデータのストリング)モジュール210/205の両方が、左側コマンド処理チャネルのための自動ブレーキ作動データを与える。
【0031】
左側機外電力制御チャネル216および左側機外自動ブレーキコマンド制御チャネル214は、左側機外ブレーキメカニズム230、特に左側機外ブレーキアクチュエータ、の動作に影響を与えるよう協働する。この点において、左側機外電力制御チャネル216および左側機外自動ブレーキコマンド制御チャネル214は、電気自動ブレーキシステムの左側機外アーキテクチャについての制御構成を示す。この例の場合、左側機外電力制御チャネル216は、たとえば130ボルトの電源(図2に示さず)を用いて、左側機外ブレーキメカニズム230のために電気ブレーキアクチュエータ動作電力を与えるよう好適に構成される。左側機外電力制御チャネル216は、左側機外ブレーキメカニズム230を切換えるよう機能する。1つの実施例において、左側機外電力制御チャネル216は、図4の文脈において以下にさらに詳細に説明されるように、左側機外ブレーキメカニズム230、より具体的には左側機外ブレーキアクチュエータ231、に結合されるEBACのために動作電力を調整するよう好適に構成される。
【0032】
左側機外自動ブレーキコマンド制御チャネル214は、左側機外電力制御チャネル216と並列である。したがって、左側機外自動ブレーキコマンド制御チャネル214は、左側機外電力制御チャネル216と同時にかつ独立して動作する。左側機外自動ブレーキコ
マンド制御チャネル214は、左側機外ブレーキメカニズム230のためのブレーキメカニズム制御信号を処理するよう好適に構成される。1つの実施例では、左側機外自動ブレーキコマンド制御チャネル214は、左側機外ブレーキメカニズム230、より具体的には左側機外ブレーキアクチュエータ231に結合されるEBACによる実行のためのブレーキ制御信号を生成するよう構成される。なお、ブレーキ制御信号は、左側機外ブレーキアクチュエータ231に適切な動作電力が与えられたときにのみ有効である。したがって、左側機外ブレーキアクチュエータ231は、ブレーキ制御信号が何らかのクランピング力の適用を命令するとともに左側機外電力制御チャネル216が動作電力を有効にする場合に、作動されることになる。対照的に、左側機外ブレーキアクチュエータ231は、左側機外自動ブレーキコマンド制御チャネル214が動作電力を無効にするまたはブレーキ制御信号がクランピング力を命令しない場合には、解放(非作動)状態のままとなる。
【0033】
好ましい実施例では、電気ブレーキシステムの処理チャネルは、互いに実質的に(完全ではなくとも)独立である。たとえば、左側機外電力制御チャネル216は、左側機外自動ブレーキコマンド制御チャネル214から独立して、左側機外ブレーキメカニズム230、より具体的には左側機外ブレーキアクチュエータ231の作動を防止するよう好適に構成される。同様に、左側機外自動ブレーキコマンド制御チャネル214は、左側機外電力制御チャネル216から独立して、左側機外ブレーキアクチュエータ231の作動を防止するよう好適に構成される。これらの処理チャネルは、独立したパスを通じて、および/または別個のデータインターフェイスから異なる作動データタイプを受取る。自動ブレーキコマンド処理チャネル214/218/222/226は、TRAセンサデータモジュール210/205(図2においては、機外自動ブレーキコマンド制御チャネル214についてのみ示す)からTRAデジタルデータを受取り、電力制御チャネル216/220/224/228は各々TRAセンサ離散データモジュール202/206から離散データを受取る。さらに、左側機外ブレーキメカニズム230、特に左側機外ブレーキアクチュエータ231のための制御構成と、左側機内ブレーキメカニズム232、特に左側機内ブレーキアクチュエータ233のための制御構成と、右側機内ブレーキメカニズム234、特に右側機内ブレーキアクチュエータ235のための制御構成と、右側機外ブレーキメカニズム236、特に右側機外ブレーキアクチュエータ237のための制御構成とは、互いに実質的に(完全ではなくても)独立している。たとえば、4つの制御構成が互いに同時かつ互いに独立して動作してもよく、または左側自動ブレーキ制御アーキテクチャが右側の自動ブレーキ制御アーキテクチャと同時にかつ独立して動作してもよい。図2に示される残りの3つの制御構成は、左側機外処理チャネルについて上述したように動作する。
【0034】
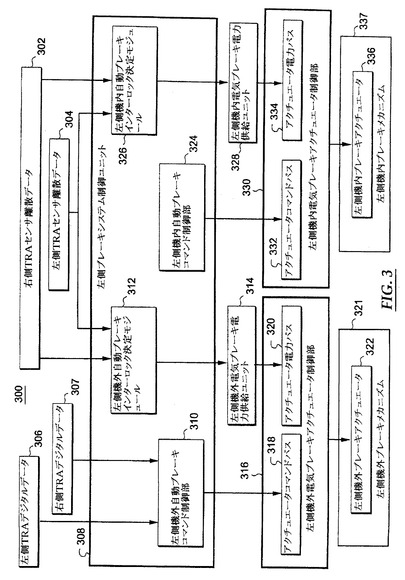
図3は、この発明の実施例に従って構成される航空機電気ブレーキシステムのある部分の概略図である。詳細には、図3は左側電気ブレーキサブシステムアーキテクチャ300のコンポーネントを示す(上述したように、右側電気ブレーキサブシステムアーキテクチャは同様の構造を有する)。電気ブレーキシステムは、図1および図2の文脈において上述したように構成されてもよい。したがって、左側電気ブレーキサブシステムアーキテクチャ300のある機構、コンポーネント、および機能は、冗長となるのでここでは記載しない。
【0035】
左側電気ブレーキサブシステムアーキテクチャ300は、BSCU308と、機外電気ブレーキ電力供給ユニット(outboard electric brake power supply unit;EBPSU)314と、機内EBPSU328と、機外EBAC316と、機内EBAC330と、少なくとも1つの左側機外ブレーキアクチュエータ322を含む1つ以上の機外ブレーキメカニズム321と、少なくとも1つの左側機内ブレーキアクチュエータ336を含む1つ以上の機内ブレーキメカニズム337とを含んでもよい。サブシステムアーキテクチャ300は、左側TRAセンサデジタルデータモジュール306、右側TRAセンサデジタ
ルデータモジュール307、右側TRAセンサ離散データモジュール302、左側TRAセンサ離散データモジュール304から、または図3に示されない他の自動ブレーキ作動センサデータモジュールから自動ブレーキ作動データを受取るまたは処理するよう好適に構成される。
【0036】
BSCU308は、BSCU110について上述したように概して構成される。BSCU308は、機外自動ブレーキインターロック決定モジュール312と、機外自動ブレーキコマンド制御モジュール310と、機内自動ブレーキコマンド制御モジュール324と、機内自動ブレーキインターロック決定モジュール326とを含んでもよい。この例では、左側および右側TRAセンサ離散データモジュール302/304の両方は、各機外および機内自動ブレーキインターロック決定モジュール312/326に対してTRA自動ブレーキ作動離散データを利用可能にする。左側および右側TRAセンサデジタルデータモジュール306/307は、各機外および機内自動ブレーキコマンド制御モジュール310/324に対してデジタルデータを利用可能にする。
【0037】
各自動ブレーキインターロック決定モジュール312/326は、自動ブレーキ作動データを処理し、自動ブレーキ作動データに応答して、ブレーキメカニズムの電源(たとえばEBPSU)についてのそれぞれの有効/無効制御信号を生成する。ここで、機外インターロック決定モジュール312は、機外EBPSU314についての1つの有効/無効制御信号を生成し、その一方、機内自動ブレーキインターロック決定モジュール326は機内EBPSU328についての別の有効/無効制御信号を生成する。たとえば、自動ブレーキ作動データが自動ブレーキ適用条件を示す場合、各々の自動ブレーキインターロック決定モジュール312/326は、そのそれぞれのブレーキメカニズムへの動作電力を独立して有効にする。ここで用いられるように、「自動ブレーキ適用条件」とは、自動ブレーキの適用へと繋がることを意図する航空機の任意の動作ステータス、状態、または構成を意味する。たとえば、自動ブレーキ適用条件は以下のことに起因し得る。すなわち、すべてのスロットルレバーをアイドル位置に配置すること、または航空機の加速度を閾値の加速度を下回るよう減少させること、つまり自動ブレーキモードの活性化、などである。他方では、自動ブレーキ作動データが自動ブレーキ適用条件を示さない場合、各々の自動ブレーキインターロック決定モジュール312/326は、そのそれぞれのブレーキメカニズムについて動作電力を独立して無効にする。この機構により、誤った自動ブレーキコマンドが左側電気ブレーキサブシステムアーキテクチャ300を通って伝播する場合にこの機構がなければ起こり得る自動ブレーキの不用意な適用を防止する。
【0038】
各々の自動ブレーキインターロック決定モジュール312/326は、以下の図4の文脈において説明されるように、自動ブレーキ作動データを処理してそれぞれの有効/無効制御信号を生成するデジタル論理ゲートと関連する回路網とを用いてハードウェアで実現されてもよい。この点において、有効/無効制御信号は論理ハイおよびロー状態を有するバイナリの制御信号であってもよい。EBPSU314/328は、適切な態様で有効/無効制御信号のそれぞれに応答する。
【0039】
この実施例では、左側機外自動ブレーキコマンド制御部310が、自動ブレーキ作動データに応答してそれぞれのブレーキ作動コマンド信号を生成するよう好適に構成されるが、自動ブレーキコマンド制御部324も、当該自動ブレーキ作動に応答してそれぞれのブレーキ作動コマンド信号を生成するよう好適に構成されてもよい。ここで、機外自動ブレーキコマンド制御部310モジュールは、機外EBAC316についてブレーキ作動コマンド信号を生成し、立ち代わって、機外EBAC316は、機外ブレーキメカニズム321、より具体的には左側機外ブレーキアクチュエータ322を制御する。その一方、機内自動ブレーキコマンド制御部324は、機内EBAC330についての独立したブレーキ作動コマンド信号を生成し、立ち代わって、機内EBAC330は機内ブレーキメカニズ
ム337、より具体的には機内ブレーキアクチュエータ336を制御する。実際の場合、ブレーキメカニズム制御信号は、ブレーキメカニズムにおいて電気ブレーキアクチュエータの作動に影響を与える(すなわち、電気ブレーキアクチュエータによって与えられる完全なクランピング力のパーセンテージ)。たとえば、ブレーキ作動コマンド信号は、クランピング力を解放または適用しないよう電気ブレーキアクチュエータにコマンドを与えてもよく、完全なクランピング力を適用するよう電気ブレーキアクチュエータにコマンドを与えてもよく、または何らかの中間のクランピング力を適用するよう電気ブレーキアクチュエータにコマンドを与えてもよい。
【0040】
機外自動ブレーキインターロック決定モジュール312および機外自動ブレーキコマンド制御部310は、自動ブレーキ作動データに対して同時に(しかし独立して)動作を行なう。同様に、機内自動ブレーキインターロック決定モジュール326および機内自動ブレーキコマンド制御部324は、自動ブレーキ作動データに対して同時に(しかし独立して)動作する。この態様での処理アーキテクチャの分離により、電気自動ブレーキインターロックシステムの信頼性および堅牢性が向上する。
【0041】
この実施例では、BSCU308は、必要に応じて、EBPSU314/328を制御し、ブレーキアクチュエータ322/336を有効/無効にする。各々のEBPSU314/328は、動作電圧をそのそれぞれのEBAC316/330に与えるよう構成される。図2に関連して上述したように、この実施例の場合、公称EBAC動作電圧は約130ボルトである。したがって、EBPSUは、この130ボルトの供給電圧をEBACに与える/そこから取除くことによりブレーキアクチュエータを有効/無効にし得る。
【0042】
機外EBPSU314は、アクチュエータ電力パス320およびアクチュエータコマンドパス318を用いてもよい。アクチュエータ電力パス320は、機外EBPSUから左側機外ブレーキメカニズム322へ動作電力を与えるよう構成される構造、チャネル、またはアーキテクチャを示す。アクチュエータコマンドパス318は、自動ブレーキ制御信号を処理するとともに当該自動ブレーキ制御信号をBSCU308から機外ブレーキメカニズム321に転送するよう構成される構造、チャネル、またはアーキテクチャを示す。機内EBAC330はさらに、同様に構成されるアクチュエータコマンドおよびアクチュエータ電力パスを含む。この例において、これらの4つのパスは別個であり、互いに独立している。
【0043】
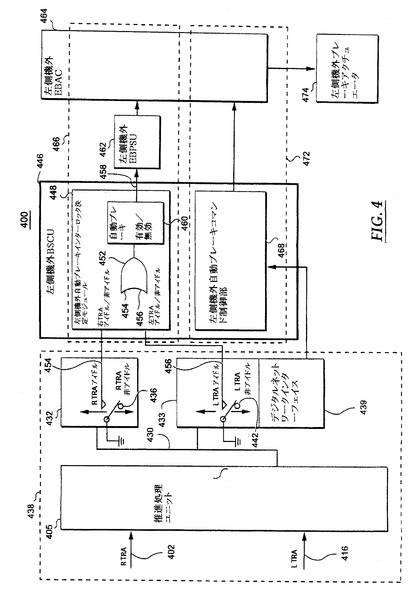
図4は、この発明の実施例に従って構成される航空機電気ブレーキサブシステムアーキテクチャ400の部分(左側機外)のための電気自動ブレーキインターロックシステムの概略図である。この例示的な実施の場合、サブシステムアーキテクチャ400は一般的に、自動ブレーキアクチュエータデータ生成システム438と、電力制御処理チャネル466と、自動ブレーキコマンド処理チャネル472と、BSCU446と、EBAC464と、ブレーキアクチュエータ474とを含む。サブシステムアーキテクチャ400はさらに、図1−図3の文脈において上述したように構成されてもよい。したがって、サブシステムアーキテクチャ400のある機構、コンポーネント、および機能は、冗長となるのでここでは記載しない。
【0044】
自動ブレーキアクチュエータデータ生成システム438は一般的に、右側スロットルレバー402と、左側スロットルレバー416と、推進処理ユニット405と、右側TRAデータスイッチ436を含む右側ネットワークインターフェイス(RNI)432と、左側TRAデータスイッチ442を含む左側ネットワークインターフェイス(LNI)433とを含む。サブシステムアーキテクチャ400は、RNI432を介して右側TRAセンサインターフェイス406/408からの自動ブレーキ作動データを受け取りまたは処理し、LNI433を介して左側TRAセンサインターフェイス420/422からの自
動ブレーキ作動データを受け取りまたは処理し、さらにネットワークインターフェイス439からのブレーキ作動コマンド入力を受け取りまたは処理するよう好適に構成される。
【0045】
スロットルレバー402/416は、図1の文脈で上述したように、入力を電気ブレーキサブシステム400に与えるために、入力を推進処理ユニット405に与えるよう構成される。
【0046】
推進処理ユニット405は、電気飛行機ネットワークバス430を介してRNI/LNI432/433にTRA入力を与えるよう構成される。TRAセンサ405/407および419/421の値がアイドル(TRA値がしきい値を下回る)際は、自動ブレーキを有効にするブレーキへの電力がいつでも望まれる。そうでなければ、電力は、自動ブレーキをインターロック/無効化する態様でブレーキに与えられない。
【0047】
RNI/LNI432/433は、BSCU446に左側TRAセンサ値および右側TRAセンサ値を与える。不用意なブレーキ(すなわちデータエラー)から保護するよう、各々のRNI/LNI432/433は、推進ユニット405から2つのデジタルTRA位置を受取る。たとえば、右側RNI432は冗長な右側TRAデジタル値を受取る。右側RNI432は、右側TRAデジタル値の冗長コピーから入手可能な第1の有効な値をゲートウェイ接続し、LNI433は、左側TRAデジタル値の冗長コピーから入手可能な第1の有効値をゲートウェイ接続する。各々のRNI/LNI432/433は次いで、自身のそれぞれのスロットルが「アイドル」または「進行」かどうかを示すデジタル離散信号に基づき、デジタル−アナログ変換(図4に示さず)を行ない、これにより電力制御処理チャネル466、特にBSCU446の動作に好適なアナログ離散出力信号(ハイ/ロー)を得る。LNI/RNIは、左側および右側TRAの信号のハイ/ロー値をBSCU446、特に、自動ブレーキインターロック決定モジュール448に与える。
【0048】
TRA信号のハイ値は、TRAデータスイッチ436/442を介して電力制御処理チャネル466へと与えられる。なお、TRAデータスイッチ436/442は、TRAセンサ値がアイドルでないことを示す図4の例示的な実施例における開位置にあるのが示されている。TRAセンサ値がアイドルであることを示す際は、TRAデータスイッチ436/442は閉じる。この点において、TRAセンサ値がアイドルである/アイドルでないかに基づき、電力処理チャネルは以下に説明されるようにブレーキへの電力供給を制御する。
【0049】
電力制御処理チャネル466は、自動ブレーキインターロック決定モジュール448およびEBPSU462を一般的に含んでもよい。電力制御処理チャネル466は、たとえばBSCU446およびEBAC464といった電気ブレーキサブシステムアーキテクチャ400のコンポーネントにおいて実現されてもよい。
【0050】
自動ブレーキインターロック決定モジュール448は、自動ブレーキ作動データを処理してそれぞれの有効/無効制御信号を生成するデジタル論理ゲートと関連する回路網とを用いてハードウェアで実現されてもよい。自動ブレーキインターロック決定モジュール448は、TRAセンサ値に基づき、有効/無効電力制御信号をEBPSU462に与える。この例示的な実施例において、自動ブレーキインターロック決定モジュール448は、ORゲート452、自動ブレーキ有効/無効モジュール460、および有効/無効電力制御信号458を含む。EBPSU462は、ここに記載されるような態様でそれぞれの有効/無効電力制御信号458に応答する。自動ブレーキインターロック決定モジュール448は、上述したようにRNI/LNI432/433から2つの入力信号454/456(論理ハイまたは論理ロー)を受取る。入力信号454は、左側スラストレバー416が「進行」または「アイドル」であるかどうかを伝え、入力信号456は、右側スラスト
レバー402が「進行」または「アイドル」であるかどうかを伝える。入力信号454/456の少なくとも1つは、BSCU446、特に自動ブレーキ有効/無効モジュール460が電力有効信号458をEBPSU462に出力してEBAC464を活性化するよう「アイドル」を示さなければならない(この点において、自動ブレーキ機能の利用可能性が1つのエンジンにおいて確保される)。別の態様では、自動ブレーキ有効/無効モジュール460は、作動電力がEBACに到達するのを防止するとともに特にブレーキアクチュエータ474を無効にするよう、電力無効信号458をEBPSU462に出力する。この点において、電力制御処理チャネル466は、自動ブレーキコマンド処理チャネル472から独立して、不用意な自動ブレーキの適用に繋がり得るいかなる単一の障害からでも保護するよう必要なアーキテクチャを与える。
【0051】
自動ブレーキコマンド処理チャネル472は一般的に、自動ブレーキコマンド制御モジュール468を含んでもよい。自動ブレーキコマンド処理チャネル472は、たとえば、BSCU446およびEBAC464といった電気ブレーキサブシステムアーキテクチャ400のコンポーネントにおいて実現されてもよい。
【0052】
自動ブレーキコマンド制御モジュール468は、自動ブレーキインターロック決定モジュール448から独立して(しかし同時に)、デジタルネットワークインターフェイス439から自動ブレーキ作動データを受取り、ブレーキシステムに障害がないかおよびスラストレバーがアイドル位置にあるかといった自動ブレーキ適用条件が満足されるかどうかを判断し、受取った自動ブレーキ作動データに応答してブレーキ制御信号を生成する。自動ブレーキ作動データが、自動ブレーキ適用条件が満足されていないことを示している場合、自動ブレーキコマンド制御モジュール468は約0%のクランピング力のコマンド(すなわち、ブレーキ適用なし)を生成する。したがって、自動ブレーキが自動ブレーキコマンド制御モジュール468によって不用意に命令され、かつ自動ブレーキインターロック決定モジュール448が電力無効信号を出力する場合、自動ブレーキコマンド制御モジュール468はブレーキを活性化しない。
【0053】
端的に言えば、電気ブレーキサブシステムアーキテクチャ400は、飛行機ネットワーク430にて利用可能となった右側TRAデータおよび左側TRAデータを用いて、上述した態様で自動ブレーキインターロック有効/無効制御信号を作り出す。この点において、電力制御処理チャネル466および自動ブレーキコマンド処理チャネル472は、同時に(しかし独立して)動作し、自動ブレーキ作動データに応答して、以下に説明される処理を用いて自動ブレーキの適用を有効/無効にする。
【0054】
図5は、航空機電気ブレーキシステムに関連した利用に好適な電気自動ブレーキインターロック処理500を示すフローチャートである。処理500に関連して行なわれるさまざまなタスクは、ソフトウェア、ハードウェア、ファームウェア、またはそれらの任意の組合せによって行なわれてもよい。例示的な目的のため、処理500の以下の説明は、図1−図4に関連して上述した要素を参照し得る。この発明の実施例において、処理500の部分は、記載したシステムの異なる要素、たとえばBSCU、EBAC、またはEBPSUなどによって行なわれてもよい。処理500は任意の数の付加的または代替的なタスクを含んでもよく、図5に示されるタスクは記載された順序で実行される必要はなく、かつ処理500はここで詳細には記載されない付加的な機能を有するさらに包括的な手順または処理に統合されてもよい。
【0055】
電気自動ブレーキインターロック処理500に関連して、電気自動ブレーキシステムは、連続的なまたは高速サンプリングの態様で自動ブレーキ作動データ(タスク502)を受取るとともに処理する。図5は、処理500の間に同時に起こる2つの処理分岐を示す。電力インターロック処理分岐504が図5の左側に示され、自動ブレーキコマンド処理
分岐506が図5の右側に示される。電力インターロック処理分岐504は自動ブレーキ作動データ、特にTRAセンサ離散データを分析し、当該データが自動ブレーキ適用条件を示しているかどうかを判断する(クエリタスク508)。示している場合、処理500は、「電力供給有効」制御信号を生成し(タスク510)、電力供給有効制御信号は、ブレーキメカニズム、特に電気ブレーキアクチュエータのための電力供給を有効にする(タスク512)。言い換えると、ブレーキメカニズムはブレーキ制御信号に応答することができることになる。この例において、処理500はEBPSUを制御し、動作電力がEBPSUに結合されるEBACに与えられるようにその動作電力供給をオンに切換える。立ち代わって、EBACは、動作電力をブレーキメカニズム、特に電気ブレーキアクチュエータに与える。
【0056】
クエリタスク508が自動ブレーキ適用条件を示していない場合、電気自動ブレーキインターロック処理500は、ブレーキアクチュエータを無効化するよう、ブレーキメカニズムのための動作電力を調整する。この点において、処理500は、ブレーキメカニズムのための電力供給を無効化する「電力供給無効」制御信号を生成する(タスク514)(その結果、処理500はブレーキアクチュエータから動作電力を取除く−タスク516)。言い換えると、自動ブレーキ適用条件が満たされない限り、ブレーキアクチュエータはいかなるブレーキ制御信号にも応答することができない。なぜならば、ブレーキアクチュエータには十分な動作電力が欠如しているからである。この例において、処理500はEBPSUを制御し、EBPSUに結合されるEBACから動作電力を取除くようその動作電力供給をオフに切換える。立ち代わって、EBACはもうブレーキメカニズムに動作電力を提供しない。
【0057】
電力インターロック処理分岐504と同時に(かつ独立して)、自動ブレーキコマンド処理分岐506は、自動ブレーキ作動データ、特にTRAデジタルデータを処理する(タスク518)。自動ブレーキ作動データが自動ブレーキ適用条件を示す場合(クエリタスク520)、処理500は、ブレーキメカニズムの作動を制御するのを試みて、自動ブレーキ作動データに応答してブレーキ作動制御コマンドを生成する(タスク522)。言い換えると、ブレーキ作動制御コマンドは、ブレーキアクチュエータに命令して、指定された量だけ作動し、これにより何らかのブレーキクランピング力が与えられる。言い換えると、ブレーキ作動制御コマンドは、ブレーキメカニズム、特にブレーキアクチュエータを制御し、クランピング力を解放またはクランピング力の適用をしないようにする。自動ブレーキ作動データが自動ブレーキ適用条件を示していない場合(クエリタスク520)、ブレーキ作動制御コマンドは、ブレーキアクチュエータの作動を防止するよう生成されない(タスク524)。上述したように、これらのブレーキ作動コマンドは、電力インターロック処理分岐504がブレーキメカニズムから動作電力を取除く場合は非有効となる。言い換えると、処理500は、次の2つの動作が起こる場合、ブレーキメカニズム、特に電気ブレーキアクチュエータについての作動制御を実行する(参照番号256)。すなわち、動作電力が電気ブレーキアクチュエータを有効化するよう与えられる場合と、ブレーキ作動制御が、自動ブレーキ適用条件を示す自動ブレーキ作動データに応答して命令される場合とである。
【0058】
まとめると、ここで記載されたような電気自動ブレーキインターロックシステムは、ブレーキメカニズム、特にブレーキアクチュエータの動作電力のためのオン/オフ制御を提供するハードウェアベースの自動ブレーキインターロックパスと、ブレーキメカニズムのためのブレーキ作動制御コマンドを生成するソフトウェアベースの処理パスとを有する自動ブレーキ制御アーキテクチャを用いる。この方策により、命令していないのに自動ブレーキが適用される確率は、ハードウェアインターロック障害およびソフトウェア制御障害の両方の確率であり、実際の実施において非常に低い。共通のコンポーネントは、自動ブレーキアクチュエータモータとモータ制御部(自身でコマンドを出すことはあまりない)
とデジタルTRAデータの源とだけである。
【0059】
少なくとも1つの例示的な実施例が上記の詳細な説明において提示されたが、膨大な数の変形例が存在することは理解されるべきである。ここで記載された例示的な実施例は、いかなる点においても、この発明の範囲、適用可能性、または構成を限定することを意図していないということをも理解されるべきである。むしろ、上記の詳細な説明は、記載した実施例を実施するための簡便な道筋を当業者に与えるものである。この発明の範囲から逸脱することがなければ、要素の機能および構成においてさまざまな変更がなされ得、この発明の範囲は、この特許出願が出願される際に公知の均等物および予見可能な均等物を含む特許請求の範囲によって規定される。
【技術分野】
【0001】
この発明の実施例は一般的に航空機のための電気ブレーキシステムに関する。より詳細には、この発明の実施例は航空機の電気ブレーキシステムのための自動ブレーキインターロックシステムに関する。
【背景技術】
【0002】
背景
多くの航空機は、直結ケーブルまたは油圧制御アーキテクチャにより制御されるブレーキメカニズムを有するブレーキシステムを用いる。現代の航空機では、従来のケーブル作動および油圧作動の航空機ブレーキシステムが、電気作動および電気制御されるブレーキシステムに取って代わられ始めている。航空機のブレーキシステムは、不用意なブレーキ(すなわち、パイロットまたは自動化された航空機システムからの正当なブレーキコマンドがない状態でのブレーキの適用)を防止する安全機能を有するよう設計されるべきである。さらに、航空機のブレーキシステムは、信頼性のあるブレーキの制御および堅牢性を提供するよう、十分な処理の冗長性を含むべきである。
【発明の概要】
【発明が解決しようとする課題】
【0003】
簡潔な概要
【課題を解決するための手段】
【0004】
航空機とともに用いるのに好適な電気自動ブレーキインターロックシステムは、車輪にブレーキをかけることを管理する電気ブレーキアクチュエータに動作電力が与えられるかどうかを制御する自動ブレーキインターロック構成を含む。自動ブレーキインターロック構成は、ブレーキメカニズム制御信号を生成するソフトウェアベースのコマンドアーキテクチャと並列のブレーキメカニズムのための動作電力を調整するハードウェアベースの電力制御アーキテクチャを含む。1つの実施例では、複数のこのようなインターロック構成が独立した態様で複数の車輪ブレーキ(または複数の車輪ブレーキのグループ)のために用いられ、これにより信頼性および堅牢性を提供する。この電気自動ブレーキインターロックシステムは、スロットルレゾルバ角度(TRA)データを用いて、自動ブレーキの適用を有効/無効にするよう自動ブレーキインターロックを駆動する。TRAデータは、航空機のエンジンによって用いられ、航空機のデジタル通信システム上にて入手可能である。実際では、自動ブレーキの設計は、すでに飛行機上に存在しているネットワークアーキテクチャを用いてもよい(自動ブレーキ使用のために専用に加えられるデータ転送設計要素が加えられなくてもよい)。
【0005】
この発明の上記および他の局面は、1つの実施例において、航空機の電気自動ブレーキインターロックシステムのための制御構成によって実施されてもよい。制御構成は、自動ブレーキ入力信号を処理するとともに電気ブレーキシステムのブレーキ作動のための動作電力を有効/無効にするよう構成されるアクチュエータ電力制御アーキテクチャを含む。制御構成はさらに、アクチュエータ電力制御アーキテクチャと並列の自動ブレーキコマンドアーキテクチャを含む。自動ブレーキコマンドアーキテクチャは、自動ブレーキ入力信号を処理するとともに、電気ブレーキシステムのための自動ブレーキ作動データに応答してブレーキ作動制御コマンドを生成するよう構成される。アクチュエータ電力制御アーキテクチャは、自動ブレーキコマンドアーキテクチャから独立して、ブレーキの作動を防止することが可能である。逆に、自動ブレーキコマンドアーキテクチャは、アクチュエータ電力制御アーキテクチャから独立して、ブレーキの作動を防止することが可能である。
【0006】
この発明の上記および他の局面は、別の実施例において、航空機の電気ブレーキシステムのための自動ブレーキインターロックを提供するための方法によって実施されてもよい。この方法は、自動ブレーキ作動データを受取ることと、当該自動ブレーキ作動データを処理することと、自動ブレーキ作動データが自動ブレーキ適用条件を示さない場合、ブレーキメカニズムのための動作電力を調節して一時的にブレーキメカニズムを無効にすることとを伴う。この電力制御スキームと同時および独立して、この方法は、自動ブレーキ作動データを処理し、自動ブレーキ作動データが自動ブレーキ適用条件を示していない場合、当該方法はブレーキの作動メカニズムを妨げる。この方法は、以下の2つの動作が同時に起きた場合、ブレーキメカニズム、特に電気ブレーキアクチュエータのための作動制御を与える。すなわち、動作電力が電気ブレーキアクチュエータを有効にするよう与えられることと、正当な自動ブレーキ適用条件に応答して、ブレーキ作動制御が命令されることとである。
【0007】
この発明の上記および他の局面は、別の実施例において、航空機のための電気自動ブレーキインターロックシステムによって実施されてもよい。電気自動ブレーキインターロックシステムは、航空機の車輪のためのブレーキメカニズムと、ブレーキメカニズムに結合される自動ブレーキ制御アーキテクチャとを含む。自動ブレーキ制御アーキテクチャは、自動ブレーキ作動データに応答して、ブレーキメカニズム、特に電気ブレーキアクチュエータのためのブレーキメカニズムコマンド信号を生成するよう構成される自動ブレーキコマンド制御部と、自動ブレーキ作動データに応答して、ブレーキメカニズム、特に電気ブレーキアクチュエータのための動作電力を調節するよう構成されるインターロックメカニズムとを含む。インターロックメカニズムは、自動ブレーキコマンド制御部の動作と同時に、かつ自動ブレーキコマンド制御部から独立して動作する。
【0008】
この概要は、詳細な説明において以下にさらに記載される簡略された形態で概念の選択したものを紹介するよう与えられる。この概要は、特許請求された主題の主となる特徴または必須の特徴を特定することを意図するものではなく、特許請求された主題の範囲を決定する助けとなるものとして用いられることも意図しない。
【図面の簡単な説明】
【0009】
この発明のさらに完全な理解は、添付の図面に関連して考慮し、詳細な説明および特許請求の範囲を参照することにより導き出され得る。図面を通じて、同様の参照番号は同様の要素を指す。
【図1】航空機電気ブレーキシステムの概略図である。
【図2】航空機電気ブレーキシステムの独立した処理チャネルを示す図である。
【図3】航空機電気ブレーキシステムの部分の概略図である。
【図4】航空機電気ブレーキシステムの部分のための電気自動ブレーキインターロックシステムの概略図である。
【図5】航空機電気自動ブレーキインターロックシステムのための自動ブレーキインターロック処理を示すフローチャートの図である。
【発明を実施するための形態】
【0010】
詳細な説明
以下の詳細な説明は、単に説明的な性質のものであり、この発明の実施例またはこのような実施例の適用および利用を制限することを意図するものではない。さらに、前述の技術分野、背景、簡潔な概要、または以下の詳細な説明において提示される如何なる明確なまたは示唆される理論によって束縛されることを意図しない。
【0011】
ここで、この発明の実施例は、機能および/または論理ブロックコンポーネントならび
にさまざまな処理ステップの点において記載され得る。このようなブロックコンポーネントは、特定された機能を実行するよう構成される任意の数のハードウェア、ソフトウェア、および/またはファームウェアコンポーネントによって実現されてもよい。たとえば、この発明の実施例は、1つ以上のマイクロプロセッサまたは他の制御装置の制御の下でさまざまな機能を実行し得るさまざまな集積回路コンポーネント、たとえばメモリ要素、デジタル信号処理要素、論理要素、またはルックアップテーブルなどを用いてもよい。さらに、当業者ならば、この発明の実施例が、さまざまな異なる航空機ブレーキシステムおよび航空機の構成に関連して実施され得るということと、ここに記載されるシステムが単にこの発明の例示的な一実施例であるということとを理解するであろう。
【0012】
簡潔さのため、信号処理、航空機のブレーキシステム、ブレーキシステム制御、およびシステムの他の機能的な局面(ならびにシステムの個々の動作コンポーネント)に関連付けられる従来の技術およびコンポーネントはここでは詳細に説明されない場合がある。さらに、ここに含まれるさまざまな図面において示される接続線は、さまざまな要素の間の例示的な機能的関係および/または物理的結合を示すよう意図される。なお多くの代替的もしくは付加的な機能的関係または物理的接続がこの発明の実施例において存在してもよい。
【0013】
以下の説明では、ともに「接続」または「結合」されている要素、ノード、または機構を参照する。ここで用いられるように、明らかに別のように述べていなければ、「接続される」は、1つの要素/ノード/機構が別の要素/ノード/機構に、必ずしも機械的ではなく直接的に接合(または直接的に連通)されることを意味する。同様に、明らかに別のように述べられてなければ、「結合される」は、1つの要素/ノード/機構が、別の要素/ノード/機構に、必ずしも機械的ではなく直接的もしくは間接的に接合(または直接的もしくは間接的に連通)されるということを意味する。したがって、図1−図3は要素の例示的な構成を示すが、付加的な仲介要素、装置、機構、またはコンポーネントがこの発明の実施例に存在してもよい。
【0014】
ここで記載される航空機は、メインの航空機バッテリのような任意の好適な電源または航空機のエンジンが動作している間に動作可能であるアクティブな航空機電源によって電力が与えられ得る電気ブレーキシステムを用いる。先進的な飛行機では自動ブレーキが用いられる。自動ブレーキは、離陸または着陸の間、航空機のブレーキシステムが自動化されたシステムによって取扱わられ得るときに他のタスクを行なうことからパイロットを自由にするタイプの自動ブレーキシステムである。着陸の際、自動ブレーキにより、パイロットは、ブレーキが自動的に取扱われる間、他のシステムを監視および飛行機を制御することが可能になる。滑走路への接地の際に、航空機は自動的に車輪のブレーキを係合させる。ペダルブレーキを用いる代わりに自動ブレーキを係合させることには、閉ループブレーキ制御アルゴリズムによって均一な減速が可能になるという付加的な利点がある。ブレーキのかかる度合いは選択され得、ブレーキの適用は、航空機の抗力、逆推力装置、またはスポイラーといった他の減速要因にかかわらず、選択されたレベルで航空機が減速するように自動的に調節される。離陸の際、航空機の自動ブレーキは離陸中断(rejected takeoff;RTO)モードに設定され得る。RTO設定にある際には、航空機はあるステータスインジケータを監視し、これらのインジケータに依存してRTOブレーキを係合させる。これは、たとえば、逆推力が活性化される場合またはパイロットが両方のスロットルを「アイドル」位置に戻す場合である。電気自動ブレーキシステムは、さまざまなブレーキメカニズム制御信号を生成する自動ブレーキコマンド機構から独立したインターロック機構を含む。インターロック機構は、電気ブレーキアクチュエータから作動電力を取除くことにより航空機の自動ブレーキの不用意な適用を防止するよう好適に構成される。したがって、アクチュエータは、不用意にブレーキを適用するよう命令された場合でも、作動電力の欠如により、この不用意な自動ブレーキコマンドに対して応答することができなくな
る。同様に、作動電力がアクチュエータに供給された場合でも、自動ブレーキコマンドの欠如により、不用意にブレーキを適用することができなくなる。
【0015】
図1は、航空機のための電気ブレーキシステム100の例示的な実施例の概略図である。図1に示される例示的な実施例において、航空機は、同様に構成される左側電気ブレーキサブシステムアーキテクチャ102と右側電気ブレーキサブシステムアーキテクチャ104とを用いる。「左側」および「右側」という用語はそれぞれ、航空機の左舷および右舷を指す。実際の場合、これら2つのサブシステムアーキテクチャ102/104は、以下に記載される態様で独立して制御されてもよい。単純さのため、以下では左側電気ブレーキサブシステムアーキテクチャ102のみが詳細に記載される。以下の説明は右側電気ブレーキサブシステムアーキテクチャ104にも適用されるということが理解されるべきである。
【0016】
この例示的な実施の場合、一般的に左側電気ブレーキサブシステムアーキテクチャ102は、スロットルレバー106と、ブレーキシステム制御ユニット(brake system control unit;BSCU)110と、BSCU110に結合される機外の電気ブレーキアクチュエータ制御部(electric brake actuator control;EBAC)112と、BSCU110に結合される機内のEBAC114と、前輪116および後輪118を含む機外の車輪グループと、前輪120および後輪122を含む機内の車輪グループと、EBACに結合される電気ブレーキメカニズム(図1に示さず)と、遠隔データ集信機(参照番号132、134、136、および138)とを含む。各電気ブレーキメカニズムは、それぞれのEBACによって制御される少なくとも1つの電気ブレーキアクチュエータ(参照番号124、126、128、および130)を含む。電気ブレーキメカニズムおよび遠隔データ集信機は、左側電気ブレーキサブシステムアーキテクチャ102の各々の車輪に対応する。図1に示されてはいないが、実施例は、車輪ごとに1つより多い電気ブレーキメカニズムおよび1つより多い遠隔データ集信機を有してもよい。
【0017】
電気ブレーキシステム100は、航空機のための任意の数の電気ブレーキ構成に適用され得、電気ブレーキシステム100は説明の容易さのために単純化された態様で示される。実施される電気ブレーキシステム100の実施例は、任意の数のBSCUと、各BSCUに結合および制御される任意の数のEBACと、各車輪について(または車輪の各々のグループについて)任意の数のブレーキメカニズムとを含んでもよい。動作時には、電気ブレーキシステム100は、航空機の各車輪についてまたは任意のグループの車輪について同時にブレーキアクチュエータ制御信号を独立して生成および適用し得る。
【0018】
左側電気ブレーキサブシステムアーキテクチャ102における要素は、データ通信バスまたは任意の好適な相互接続構成もしくはアーキテクチャを用いて、ともに結合され得る。たとえば、デジタルデータ通信バスは、EBAC制御信号をBSCU110からEBACへと通信し、アクチュエータ制御信号をEBACから電気ブレーキアクチュエータ124/126/128/130などへと通信するよう構成されてもよい。簡潔にいえば、BSCU110はスロットルレバー106/142の操作に反応し、EBAC112/114が受取る制御信号を生成する。立ち代わって、EBAC112/114は、電気ブレーキメカニズム、特に、アクチュエータ124/126/128/130が受取るブレーキメカニズム制御信号を生成する。立ち代わって、電気ブレーキアクチュエータ124/126/128/130はそれぞれの車輪の回転を邪魔するまたは防止するよう作動する。これらの機構およびコンポーネントは、より詳細に以下に記載される。
【0019】
スロットルレバー106および142は、電気ブレーキシステム100に入力を与えるよう構成される。パイロットはスロットルレバー106および142を物理的に操作し、これによりスロットルレバー106および142の回転または運動(すなわち何らかの形
態の物理的入力)がなされる。たとえば、電気ブレーキシステム100(特にBSCU110)は、図4の文脈において以下に詳細に説明されるように、スラストレバーがアイドルでない場合に自動ブレーキの適用を防止するよう構成されてもよい。この物理的回転またはスロットルレゾルバ角度(throttle resolver angle;TRA)は、1つ以上のスラストレバーセンサによってその本来の位置から計測され、BSCU制御信号へと変換され、BSCU110に送られる。BSCUは、ブレーキアクチュエータ124/126/128/130について所望の自動ブレーキ条件を伝えてもよく、または図4の文脈において以下に詳細に説明されるようにブレーキアクチュエータ124/126/128/130を無効にしてもよい。
【0020】
電気ブレーキシステム100の実施例は、任意の数のBSCU110を用いてもよい。説明の容易さのため、この例では、BSCU110は1つのみ含まれる。BSCU110は、ブレーキコマンドを示すEBAC制御信号をデジタルで算出する埋込ソフトウェアを有する電子制御ユニットである。この電気的およびソフトウェアの実現例により、所与の航空機の実施に必要とされる場合、ブレーキの能力および感覚のさらに他の最適化およびカスタマイズが可能になる。
【0021】
BSCU110は、ここに記載される機能を実行するよう設計される、汎用プロセッサ、コンテントアドレス可能なメモリ、デジタル信号プロセッサ、特定用途集積回路、フィールドプログラム可能なゲートアレイ、任意の好適なプログラム可能な論理装置、離散ゲートもしくはトランジスタ論理、離散ハードウェアコンポーネント、またはそれらの任意の組合せにより実施または実行されてもよい。プロセッサは、マイクロプロセッサ、コントローラ、マイクロコントローラ、または状態機械として実現されてもよい。プロセッサはさらに、計算装置の組合せ、たとえばデジタル信号プロセッサおよびマイクロプロセッサの組合せ、複数のマイクロプロセッサ、デジタル信号プロセッサコアに連動する1つ以上のマイクロプロセッサ、または任意の他のこのような構成として実現されてもよい。一実施例では、BSCU110は、ソフトウェアをホスティングするとともに、当該ソフトウェアのための外部インターフェイスを提供するコンピュータプロセッサ(たとえばパワーPC(PowerPC)555)で実現される。
【0022】
BSCU110は、さまざまな航空機入力を監視し、ペダルブレーキ、パーキングブレーキ、自動化されたブレーキ、およびギヤ引込みブレーキといった制御機能を与えるが、これらに限定されない。さらに、BSCU110は(BACU110に対して内部または外部で生成され得る)滑り止めコマンドを組み合わせ、これによりブレーキ性能が増強される。BSCU110は、両方のスロットルレバー106/42からの入力といったような付加的なコマンド制御信号とともに、ブレーキペダル(図1には示さず)からパイロットコマンド制御信号を得る。BSCU110はさらに、遠隔データ集信機132/134/136/138から付加的な制御データ(たとえば車輪スピード、回転方向、タイヤ空気圧など)を受取ってもよい。BSCU110はその入力信号を処理し、EBAC112/114が受取る1つ以上のEBAC制御信号を生成する。実際では、BSCU110はデジタルデータバスを介してEBAC112/114にEBAC制御信号を送信する。一般化されたアーキテクチャ(図示せず)において、各BSCUは、その制御の下で、任意の数のEBACとともに用いられる独立した出力信号を生成し得る。
【0023】
この例では、BSCU110はEBAC112/114に結合される。各々のEBAC112/114は、BSCU110について上述した態様で実施、実行、または実現されてもよい。一実施例では、各々のEBAC112/114は、ソフトウェアをホスティングし、当該ソフトウェアのための外部インターフェイスを提供し、かつここに記載されるさまざまなEBAC動作を実行するよう構成される好適な処理論理を含むコンピュータプロセッサ(たとえばパワーPC555)で実現される。各EBAC112/114は、B
SCU110からEBAC制御信号を取得し、EBAC制御信号を処理し、その関連する電気ブレーキメカニズムについてブレーキメカニズム制御信号(ブレーキアクチュエータ信号)を生成する。
【0024】
なお、BSCU110およびEBAC112/114の機能は、単一のプロセッサベースの機構またはコンポーネントへと組合されてもよい。この点において、BSCU110、EBAC112、EBAC114、またはそれらの任意の組合せは、電気ブレーキシステム100のためのブレーキ制御アーキテクチャであると考えられ得る。このようなブレーキ制御アーキテクチャは、ここで記載される自動ブレーキ制御動作をサポートする好適に構成された処理論理、機能、および機構を含む。
【0025】
各車輪は関連する電気ブレーキメカニズムを含み得、各ブレーキメカニズムは1つ以上の電気ブレーキアクチュエータを含み得る。結果として、各々の車輪に対してブレーキをかけることは、電気ブレーキシステム100により独立してかつ個々に制御され得る。各電気ブレーキアクチュエータは、そのそれぞれのEBACからアクチュエータ制御信号を受取るよう好適に構成され、アクチュエータ制御信号は電気ブレーキアクチュエータの調節に影響を与える。この実施例では、電気ブレーキシステム100における各々の電気ブレーキアクチュエータはEBACに結合されるとともにEBACによって制御される。この態様でEBAC112/114は電気ブレーキアクチュエータを制御し、車輪ブレーキの適用を実行、解除、調節、およびそうでなければ制御する。この点で、EBAC112/114は、BSCU110が生成するそれぞれのEBAC制御信号に応答してブレーキ制御信号を生成する。このブレーキ制御信号は、航空機によって用いられる特定のブレーキシステムとの互換性のために好適にフォーマットおよび構成される。当業者ならば、航空機ブレーキメカニズムおよびブレーキが制御される一般的な態様に詳しく、このような公知の局面はここでは詳細には記載されない。
【0026】
左側電気ブレーキサブシステムアーキテクチャ102は、好適に構成された電気制御サブシステム140を含むかまたはそれと協働してもよい。電力制御サブシステム140は、BSCU110、EBAC112/114(および/または電気ブレーキシステム100の他のコンポーネント)に結合されてもよい。この実施例では、電力制御サブシステム140は、必要に応じて、電気ブレーキメカニズムおよび/または電気ブレーキアクチュエータのための動作電力を提供、適用、除去、切換、またはそうでなければ調節するよう好適に構成される。たとえば、電力制御サブシステム140は、EBAC112/114および/または左側電気ブレーキサブシステムアーキテクチャ102の他のコンポーネントから必要に応じて電力を取除くことができ、これにより電気ブレーキシステム100のためのインターロック機構が与えられる。以下にさらに詳細に記載されるように、電力制御サブシステム140は、左側機外および左側機内電気ブレーキコンポーネントのための動作電力を調製するよう独立した態様で機能する左側機外電力供給ユニットおよび左側機内電力供給ユニットにより実現されてもよい。
【0027】
右側電気ブレーキサブシステムアーキテクチャ104は、左側電気ブレーキサブシステムアーキテクチャ102と同様の構造を有する(共通の特徴、機能、および要素はここでは冗長となるので記載しない)。この例示的な実施の場合、図1に示されるように、右側電気ブレーキサブシステムアーキテクチャ104は、スロットルレバー106とは別個でかつ区別される右側スロットルレバー142と、BSCU146と、機内EBAC148と、機外EBAC150と、電力制御サブシステム140とは別個であるとともに区別される電力制御サブシステム152とを含む。電気ブレーキシステム100の当該2つの側は、スロットルレバー106/142の両方から自動ブレーキブレーキ作動データを受取る。代替的には、電気ブレーキシステム100の2つの側は、他の別個かつ区別されるブレーキ作動メカニズム(図1に示さず)を用いてもよい。右側電気ブレーキサブシステム
アーキテクチャ104のこれらのさまざまなコンポーネントはともに結合され、これにより左側電気ブレーキサブシステムアーキテクチャ102について上述したように動作するが、右側での処理は左側での処理と独立しているのが好ましい。
【0028】
航空機のための電気ブレーキシステムの一実施例に従うと、自動ブレーキインターロックメカニズムまたは機構が、車輪のブレーキの不用意な適用を防止するよう与えられる。当該電気ブレーキシステムにおけるシステムまたは制御メカニズムは、このような自動ブレーキインターロック機構を実現するよう設計され得る。たとえば、電気ブレーキシステム100は、電気自動ブレーキインターロックシステムをサポートするよう構成されてもよい。
【0029】
図2は、この発明の実施例に従って構成される航空機電気自動ブレーキインターロックシステムの独立した処理チャネルを示す図である。特に、図2は、左側機外電力制御チャネル216、左側機外自動ブレーキコマンド制御チャネル214、左側機内電力制御チャネル220、左側機内自動ブレーキコマンド制御チャネル218、右側機内電力制御チャネル228、右側機内自動ブレーキコマンド制御チャネル226、右側機外電力制御チャネル224、および右側機外自動ブレーキコマンド制御チャネル222を示す。これらの処理チャネルは、電気ブレーキシステム100のコンポーネント、たとえば、BSCU、EBAC、電力制御サブシステムなど、において実現されてもよい。実際には、各々の処理チャネルは、ハードウェアコンポーネント、デジタル論理要素、処理論理、回路コンポーネント、または任意の好適に構成されるアーキテクチャ、構成、もしくは機構を含んでもよいがこれらに限定されない。さらに、各処理チャネルはここに記載されるそれぞれの動作を行なうよう好適に構成される。
【0030】
この例について、左側処理チャネルは電気ブレーキシステムの左側の処理に対応し、右側処理チャネルは電気ブレーキシステムの右側の処理に対応する。この点において、左側および右側処理電力チャネルは各々、左側および右側TRAセンサ離散(ハイまたはローという2つの取り得る状態を有するバイナリ信号)データモジュール202/206によって入力を受け得る。これらのTRAセンサ離散データモジュール202/206は、自動ブレーキ作動データを左側および右側電力処理チャネルに与えるよう構成される。電気ブレーキシステムのある実施例では、左側および右側TRAデジタルデータ(バイナリデータのストリング)モジュール210/205の両方が、左側コマンド処理チャネルのための自動ブレーキ作動データを与える。
【0031】
左側機外電力制御チャネル216および左側機外自動ブレーキコマンド制御チャネル214は、左側機外ブレーキメカニズム230、特に左側機外ブレーキアクチュエータ、の動作に影響を与えるよう協働する。この点において、左側機外電力制御チャネル216および左側機外自動ブレーキコマンド制御チャネル214は、電気自動ブレーキシステムの左側機外アーキテクチャについての制御構成を示す。この例の場合、左側機外電力制御チャネル216は、たとえば130ボルトの電源(図2に示さず)を用いて、左側機外ブレーキメカニズム230のために電気ブレーキアクチュエータ動作電力を与えるよう好適に構成される。左側機外電力制御チャネル216は、左側機外ブレーキメカニズム230を切換えるよう機能する。1つの実施例において、左側機外電力制御チャネル216は、図4の文脈において以下にさらに詳細に説明されるように、左側機外ブレーキメカニズム230、より具体的には左側機外ブレーキアクチュエータ231、に結合されるEBACのために動作電力を調整するよう好適に構成される。
【0032】
左側機外自動ブレーキコマンド制御チャネル214は、左側機外電力制御チャネル216と並列である。したがって、左側機外自動ブレーキコマンド制御チャネル214は、左側機外電力制御チャネル216と同時にかつ独立して動作する。左側機外自動ブレーキコ
マンド制御チャネル214は、左側機外ブレーキメカニズム230のためのブレーキメカニズム制御信号を処理するよう好適に構成される。1つの実施例では、左側機外自動ブレーキコマンド制御チャネル214は、左側機外ブレーキメカニズム230、より具体的には左側機外ブレーキアクチュエータ231に結合されるEBACによる実行のためのブレーキ制御信号を生成するよう構成される。なお、ブレーキ制御信号は、左側機外ブレーキアクチュエータ231に適切な動作電力が与えられたときにのみ有効である。したがって、左側機外ブレーキアクチュエータ231は、ブレーキ制御信号が何らかのクランピング力の適用を命令するとともに左側機外電力制御チャネル216が動作電力を有効にする場合に、作動されることになる。対照的に、左側機外ブレーキアクチュエータ231は、左側機外自動ブレーキコマンド制御チャネル214が動作電力を無効にするまたはブレーキ制御信号がクランピング力を命令しない場合には、解放(非作動)状態のままとなる。
【0033】
好ましい実施例では、電気ブレーキシステムの処理チャネルは、互いに実質的に(完全ではなくとも)独立である。たとえば、左側機外電力制御チャネル216は、左側機外自動ブレーキコマンド制御チャネル214から独立して、左側機外ブレーキメカニズム230、より具体的には左側機外ブレーキアクチュエータ231の作動を防止するよう好適に構成される。同様に、左側機外自動ブレーキコマンド制御チャネル214は、左側機外電力制御チャネル216から独立して、左側機外ブレーキアクチュエータ231の作動を防止するよう好適に構成される。これらの処理チャネルは、独立したパスを通じて、および/または別個のデータインターフェイスから異なる作動データタイプを受取る。自動ブレーキコマンド処理チャネル214/218/222/226は、TRAセンサデータモジュール210/205(図2においては、機外自動ブレーキコマンド制御チャネル214についてのみ示す)からTRAデジタルデータを受取り、電力制御チャネル216/220/224/228は各々TRAセンサ離散データモジュール202/206から離散データを受取る。さらに、左側機外ブレーキメカニズム230、特に左側機外ブレーキアクチュエータ231のための制御構成と、左側機内ブレーキメカニズム232、特に左側機内ブレーキアクチュエータ233のための制御構成と、右側機内ブレーキメカニズム234、特に右側機内ブレーキアクチュエータ235のための制御構成と、右側機外ブレーキメカニズム236、特に右側機外ブレーキアクチュエータ237のための制御構成とは、互いに実質的に(完全ではなくても)独立している。たとえば、4つの制御構成が互いに同時かつ互いに独立して動作してもよく、または左側自動ブレーキ制御アーキテクチャが右側の自動ブレーキ制御アーキテクチャと同時にかつ独立して動作してもよい。図2に示される残りの3つの制御構成は、左側機外処理チャネルについて上述したように動作する。
【0034】
図3は、この発明の実施例に従って構成される航空機電気ブレーキシステムのある部分の概略図である。詳細には、図3は左側電気ブレーキサブシステムアーキテクチャ300のコンポーネントを示す(上述したように、右側電気ブレーキサブシステムアーキテクチャは同様の構造を有する)。電気ブレーキシステムは、図1および図2の文脈において上述したように構成されてもよい。したがって、左側電気ブレーキサブシステムアーキテクチャ300のある機構、コンポーネント、および機能は、冗長となるのでここでは記載しない。
【0035】
左側電気ブレーキサブシステムアーキテクチャ300は、BSCU308と、機外電気ブレーキ電力供給ユニット(outboard electric brake power supply unit;EBPSU)314と、機内EBPSU328と、機外EBAC316と、機内EBAC330と、少なくとも1つの左側機外ブレーキアクチュエータ322を含む1つ以上の機外ブレーキメカニズム321と、少なくとも1つの左側機内ブレーキアクチュエータ336を含む1つ以上の機内ブレーキメカニズム337とを含んでもよい。サブシステムアーキテクチャ300は、左側TRAセンサデジタルデータモジュール306、右側TRAセンサデジタ
ルデータモジュール307、右側TRAセンサ離散データモジュール302、左側TRAセンサ離散データモジュール304から、または図3に示されない他の自動ブレーキ作動センサデータモジュールから自動ブレーキ作動データを受取るまたは処理するよう好適に構成される。
【0036】
BSCU308は、BSCU110について上述したように概して構成される。BSCU308は、機外自動ブレーキインターロック決定モジュール312と、機外自動ブレーキコマンド制御モジュール310と、機内自動ブレーキコマンド制御モジュール324と、機内自動ブレーキインターロック決定モジュール326とを含んでもよい。この例では、左側および右側TRAセンサ離散データモジュール302/304の両方は、各機外および機内自動ブレーキインターロック決定モジュール312/326に対してTRA自動ブレーキ作動離散データを利用可能にする。左側および右側TRAセンサデジタルデータモジュール306/307は、各機外および機内自動ブレーキコマンド制御モジュール310/324に対してデジタルデータを利用可能にする。
【0037】
各自動ブレーキインターロック決定モジュール312/326は、自動ブレーキ作動データを処理し、自動ブレーキ作動データに応答して、ブレーキメカニズムの電源(たとえばEBPSU)についてのそれぞれの有効/無効制御信号を生成する。ここで、機外インターロック決定モジュール312は、機外EBPSU314についての1つの有効/無効制御信号を生成し、その一方、機内自動ブレーキインターロック決定モジュール326は機内EBPSU328についての別の有効/無効制御信号を生成する。たとえば、自動ブレーキ作動データが自動ブレーキ適用条件を示す場合、各々の自動ブレーキインターロック決定モジュール312/326は、そのそれぞれのブレーキメカニズムへの動作電力を独立して有効にする。ここで用いられるように、「自動ブレーキ適用条件」とは、自動ブレーキの適用へと繋がることを意図する航空機の任意の動作ステータス、状態、または構成を意味する。たとえば、自動ブレーキ適用条件は以下のことに起因し得る。すなわち、すべてのスロットルレバーをアイドル位置に配置すること、または航空機の加速度を閾値の加速度を下回るよう減少させること、つまり自動ブレーキモードの活性化、などである。他方では、自動ブレーキ作動データが自動ブレーキ適用条件を示さない場合、各々の自動ブレーキインターロック決定モジュール312/326は、そのそれぞれのブレーキメカニズムについて動作電力を独立して無効にする。この機構により、誤った自動ブレーキコマンドが左側電気ブレーキサブシステムアーキテクチャ300を通って伝播する場合にこの機構がなければ起こり得る自動ブレーキの不用意な適用を防止する。
【0038】
各々の自動ブレーキインターロック決定モジュール312/326は、以下の図4の文脈において説明されるように、自動ブレーキ作動データを処理してそれぞれの有効/無効制御信号を生成するデジタル論理ゲートと関連する回路網とを用いてハードウェアで実現されてもよい。この点において、有効/無効制御信号は論理ハイおよびロー状態を有するバイナリの制御信号であってもよい。EBPSU314/328は、適切な態様で有効/無効制御信号のそれぞれに応答する。
【0039】
この実施例では、左側機外自動ブレーキコマンド制御部310が、自動ブレーキ作動データに応答してそれぞれのブレーキ作動コマンド信号を生成するよう好適に構成されるが、自動ブレーキコマンド制御部324も、当該自動ブレーキ作動に応答してそれぞれのブレーキ作動コマンド信号を生成するよう好適に構成されてもよい。ここで、機外自動ブレーキコマンド制御部310モジュールは、機外EBAC316についてブレーキ作動コマンド信号を生成し、立ち代わって、機外EBAC316は、機外ブレーキメカニズム321、より具体的には左側機外ブレーキアクチュエータ322を制御する。その一方、機内自動ブレーキコマンド制御部324は、機内EBAC330についての独立したブレーキ作動コマンド信号を生成し、立ち代わって、機内EBAC330は機内ブレーキメカニズ
ム337、より具体的には機内ブレーキアクチュエータ336を制御する。実際の場合、ブレーキメカニズム制御信号は、ブレーキメカニズムにおいて電気ブレーキアクチュエータの作動に影響を与える(すなわち、電気ブレーキアクチュエータによって与えられる完全なクランピング力のパーセンテージ)。たとえば、ブレーキ作動コマンド信号は、クランピング力を解放または適用しないよう電気ブレーキアクチュエータにコマンドを与えてもよく、完全なクランピング力を適用するよう電気ブレーキアクチュエータにコマンドを与えてもよく、または何らかの中間のクランピング力を適用するよう電気ブレーキアクチュエータにコマンドを与えてもよい。
【0040】
機外自動ブレーキインターロック決定モジュール312および機外自動ブレーキコマンド制御部310は、自動ブレーキ作動データに対して同時に(しかし独立して)動作を行なう。同様に、機内自動ブレーキインターロック決定モジュール326および機内自動ブレーキコマンド制御部324は、自動ブレーキ作動データに対して同時に(しかし独立して)動作する。この態様での処理アーキテクチャの分離により、電気自動ブレーキインターロックシステムの信頼性および堅牢性が向上する。
【0041】
この実施例では、BSCU308は、必要に応じて、EBPSU314/328を制御し、ブレーキアクチュエータ322/336を有効/無効にする。各々のEBPSU314/328は、動作電圧をそのそれぞれのEBAC316/330に与えるよう構成される。図2に関連して上述したように、この実施例の場合、公称EBAC動作電圧は約130ボルトである。したがって、EBPSUは、この130ボルトの供給電圧をEBACに与える/そこから取除くことによりブレーキアクチュエータを有効/無効にし得る。
【0042】
機外EBPSU314は、アクチュエータ電力パス320およびアクチュエータコマンドパス318を用いてもよい。アクチュエータ電力パス320は、機外EBPSUから左側機外ブレーキメカニズム322へ動作電力を与えるよう構成される構造、チャネル、またはアーキテクチャを示す。アクチュエータコマンドパス318は、自動ブレーキ制御信号を処理するとともに当該自動ブレーキ制御信号をBSCU308から機外ブレーキメカニズム321に転送するよう構成される構造、チャネル、またはアーキテクチャを示す。機内EBAC330はさらに、同様に構成されるアクチュエータコマンドおよびアクチュエータ電力パスを含む。この例において、これらの4つのパスは別個であり、互いに独立している。
【0043】
図4は、この発明の実施例に従って構成される航空機電気ブレーキサブシステムアーキテクチャ400の部分(左側機外)のための電気自動ブレーキインターロックシステムの概略図である。この例示的な実施の場合、サブシステムアーキテクチャ400は一般的に、自動ブレーキアクチュエータデータ生成システム438と、電力制御処理チャネル466と、自動ブレーキコマンド処理チャネル472と、BSCU446と、EBAC464と、ブレーキアクチュエータ474とを含む。サブシステムアーキテクチャ400はさらに、図1−図3の文脈において上述したように構成されてもよい。したがって、サブシステムアーキテクチャ400のある機構、コンポーネント、および機能は、冗長となるのでここでは記載しない。
【0044】
自動ブレーキアクチュエータデータ生成システム438は一般的に、右側スロットルレバー402と、左側スロットルレバー416と、推進処理ユニット405と、右側TRAデータスイッチ436を含む右側ネットワークインターフェイス(RNI)432と、左側TRAデータスイッチ442を含む左側ネットワークインターフェイス(LNI)433とを含む。サブシステムアーキテクチャ400は、RNI432を介して右側TRAセンサインターフェイス406/408からの自動ブレーキ作動データを受け取りまたは処理し、LNI433を介して左側TRAセンサインターフェイス420/422からの自
動ブレーキ作動データを受け取りまたは処理し、さらにネットワークインターフェイス439からのブレーキ作動コマンド入力を受け取りまたは処理するよう好適に構成される。
【0045】
スロットルレバー402/416は、図1の文脈で上述したように、入力を電気ブレーキサブシステム400に与えるために、入力を推進処理ユニット405に与えるよう構成される。
【0046】
推進処理ユニット405は、電気飛行機ネットワークバス430を介してRNI/LNI432/433にTRA入力を与えるよう構成される。TRAセンサ405/407および419/421の値がアイドル(TRA値がしきい値を下回る)際は、自動ブレーキを有効にするブレーキへの電力がいつでも望まれる。そうでなければ、電力は、自動ブレーキをインターロック/無効化する態様でブレーキに与えられない。
【0047】
RNI/LNI432/433は、BSCU446に左側TRAセンサ値および右側TRAセンサ値を与える。不用意なブレーキ(すなわちデータエラー)から保護するよう、各々のRNI/LNI432/433は、推進ユニット405から2つのデジタルTRA位置を受取る。たとえば、右側RNI432は冗長な右側TRAデジタル値を受取る。右側RNI432は、右側TRAデジタル値の冗長コピーから入手可能な第1の有効な値をゲートウェイ接続し、LNI433は、左側TRAデジタル値の冗長コピーから入手可能な第1の有効値をゲートウェイ接続する。各々のRNI/LNI432/433は次いで、自身のそれぞれのスロットルが「アイドル」または「進行」かどうかを示すデジタル離散信号に基づき、デジタル−アナログ変換(図4に示さず)を行ない、これにより電力制御処理チャネル466、特にBSCU446の動作に好適なアナログ離散出力信号(ハイ/ロー)を得る。LNI/RNIは、左側および右側TRAの信号のハイ/ロー値をBSCU446、特に、自動ブレーキインターロック決定モジュール448に与える。
【0048】
TRA信号のハイ値は、TRAデータスイッチ436/442を介して電力制御処理チャネル466へと与えられる。なお、TRAデータスイッチ436/442は、TRAセンサ値がアイドルでないことを示す図4の例示的な実施例における開位置にあるのが示されている。TRAセンサ値がアイドルであることを示す際は、TRAデータスイッチ436/442は閉じる。この点において、TRAセンサ値がアイドルである/アイドルでないかに基づき、電力処理チャネルは以下に説明されるようにブレーキへの電力供給を制御する。
【0049】
電力制御処理チャネル466は、自動ブレーキインターロック決定モジュール448およびEBPSU462を一般的に含んでもよい。電力制御処理チャネル466は、たとえばBSCU446およびEBAC464といった電気ブレーキサブシステムアーキテクチャ400のコンポーネントにおいて実現されてもよい。
【0050】
自動ブレーキインターロック決定モジュール448は、自動ブレーキ作動データを処理してそれぞれの有効/無効制御信号を生成するデジタル論理ゲートと関連する回路網とを用いてハードウェアで実現されてもよい。自動ブレーキインターロック決定モジュール448は、TRAセンサ値に基づき、有効/無効電力制御信号をEBPSU462に与える。この例示的な実施例において、自動ブレーキインターロック決定モジュール448は、ORゲート452、自動ブレーキ有効/無効モジュール460、および有効/無効電力制御信号458を含む。EBPSU462は、ここに記載されるような態様でそれぞれの有効/無効電力制御信号458に応答する。自動ブレーキインターロック決定モジュール448は、上述したようにRNI/LNI432/433から2つの入力信号454/456(論理ハイまたは論理ロー)を受取る。入力信号454は、左側スラストレバー416が「進行」または「アイドル」であるかどうかを伝え、入力信号456は、右側スラスト
レバー402が「進行」または「アイドル」であるかどうかを伝える。入力信号454/456の少なくとも1つは、BSCU446、特に自動ブレーキ有効/無効モジュール460が電力有効信号458をEBPSU462に出力してEBAC464を活性化するよう「アイドル」を示さなければならない(この点において、自動ブレーキ機能の利用可能性が1つのエンジンにおいて確保される)。別の態様では、自動ブレーキ有効/無効モジュール460は、作動電力がEBACに到達するのを防止するとともに特にブレーキアクチュエータ474を無効にするよう、電力無効信号458をEBPSU462に出力する。この点において、電力制御処理チャネル466は、自動ブレーキコマンド処理チャネル472から独立して、不用意な自動ブレーキの適用に繋がり得るいかなる単一の障害からでも保護するよう必要なアーキテクチャを与える。
【0051】
自動ブレーキコマンド処理チャネル472は一般的に、自動ブレーキコマンド制御モジュール468を含んでもよい。自動ブレーキコマンド処理チャネル472は、たとえば、BSCU446およびEBAC464といった電気ブレーキサブシステムアーキテクチャ400のコンポーネントにおいて実現されてもよい。
【0052】
自動ブレーキコマンド制御モジュール468は、自動ブレーキインターロック決定モジュール448から独立して(しかし同時に)、デジタルネットワークインターフェイス439から自動ブレーキ作動データを受取り、ブレーキシステムに障害がないかおよびスラストレバーがアイドル位置にあるかといった自動ブレーキ適用条件が満足されるかどうかを判断し、受取った自動ブレーキ作動データに応答してブレーキ制御信号を生成する。自動ブレーキ作動データが、自動ブレーキ適用条件が満足されていないことを示している場合、自動ブレーキコマンド制御モジュール468は約0%のクランピング力のコマンド(すなわち、ブレーキ適用なし)を生成する。したがって、自動ブレーキが自動ブレーキコマンド制御モジュール468によって不用意に命令され、かつ自動ブレーキインターロック決定モジュール448が電力無効信号を出力する場合、自動ブレーキコマンド制御モジュール468はブレーキを活性化しない。
【0053】
端的に言えば、電気ブレーキサブシステムアーキテクチャ400は、飛行機ネットワーク430にて利用可能となった右側TRAデータおよび左側TRAデータを用いて、上述した態様で自動ブレーキインターロック有効/無効制御信号を作り出す。この点において、電力制御処理チャネル466および自動ブレーキコマンド処理チャネル472は、同時に(しかし独立して)動作し、自動ブレーキ作動データに応答して、以下に説明される処理を用いて自動ブレーキの適用を有効/無効にする。
【0054】
図5は、航空機電気ブレーキシステムに関連した利用に好適な電気自動ブレーキインターロック処理500を示すフローチャートである。処理500に関連して行なわれるさまざまなタスクは、ソフトウェア、ハードウェア、ファームウェア、またはそれらの任意の組合せによって行なわれてもよい。例示的な目的のため、処理500の以下の説明は、図1−図4に関連して上述した要素を参照し得る。この発明の実施例において、処理500の部分は、記載したシステムの異なる要素、たとえばBSCU、EBAC、またはEBPSUなどによって行なわれてもよい。処理500は任意の数の付加的または代替的なタスクを含んでもよく、図5に示されるタスクは記載された順序で実行される必要はなく、かつ処理500はここで詳細には記載されない付加的な機能を有するさらに包括的な手順または処理に統合されてもよい。
【0055】
電気自動ブレーキインターロック処理500に関連して、電気自動ブレーキシステムは、連続的なまたは高速サンプリングの態様で自動ブレーキ作動データ(タスク502)を受取るとともに処理する。図5は、処理500の間に同時に起こる2つの処理分岐を示す。電力インターロック処理分岐504が図5の左側に示され、自動ブレーキコマンド処理
分岐506が図5の右側に示される。電力インターロック処理分岐504は自動ブレーキ作動データ、特にTRAセンサ離散データを分析し、当該データが自動ブレーキ適用条件を示しているかどうかを判断する(クエリタスク508)。示している場合、処理500は、「電力供給有効」制御信号を生成し(タスク510)、電力供給有効制御信号は、ブレーキメカニズム、特に電気ブレーキアクチュエータのための電力供給を有効にする(タスク512)。言い換えると、ブレーキメカニズムはブレーキ制御信号に応答することができることになる。この例において、処理500はEBPSUを制御し、動作電力がEBPSUに結合されるEBACに与えられるようにその動作電力供給をオンに切換える。立ち代わって、EBACは、動作電力をブレーキメカニズム、特に電気ブレーキアクチュエータに与える。
【0056】
クエリタスク508が自動ブレーキ適用条件を示していない場合、電気自動ブレーキインターロック処理500は、ブレーキアクチュエータを無効化するよう、ブレーキメカニズムのための動作電力を調整する。この点において、処理500は、ブレーキメカニズムのための電力供給を無効化する「電力供給無効」制御信号を生成する(タスク514)(その結果、処理500はブレーキアクチュエータから動作電力を取除く−タスク516)。言い換えると、自動ブレーキ適用条件が満たされない限り、ブレーキアクチュエータはいかなるブレーキ制御信号にも応答することができない。なぜならば、ブレーキアクチュエータには十分な動作電力が欠如しているからである。この例において、処理500はEBPSUを制御し、EBPSUに結合されるEBACから動作電力を取除くようその動作電力供給をオフに切換える。立ち代わって、EBACはもうブレーキメカニズムに動作電力を提供しない。
【0057】
電力インターロック処理分岐504と同時に(かつ独立して)、自動ブレーキコマンド処理分岐506は、自動ブレーキ作動データ、特にTRAデジタルデータを処理する(タスク518)。自動ブレーキ作動データが自動ブレーキ適用条件を示す場合(クエリタスク520)、処理500は、ブレーキメカニズムの作動を制御するのを試みて、自動ブレーキ作動データに応答してブレーキ作動制御コマンドを生成する(タスク522)。言い換えると、ブレーキ作動制御コマンドは、ブレーキアクチュエータに命令して、指定された量だけ作動し、これにより何らかのブレーキクランピング力が与えられる。言い換えると、ブレーキ作動制御コマンドは、ブレーキメカニズム、特にブレーキアクチュエータを制御し、クランピング力を解放またはクランピング力の適用をしないようにする。自動ブレーキ作動データが自動ブレーキ適用条件を示していない場合(クエリタスク520)、ブレーキ作動制御コマンドは、ブレーキアクチュエータの作動を防止するよう生成されない(タスク524)。上述したように、これらのブレーキ作動コマンドは、電力インターロック処理分岐504がブレーキメカニズムから動作電力を取除く場合は非有効となる。言い換えると、処理500は、次の2つの動作が起こる場合、ブレーキメカニズム、特に電気ブレーキアクチュエータについての作動制御を実行する(参照番号256)。すなわち、動作電力が電気ブレーキアクチュエータを有効化するよう与えられる場合と、ブレーキ作動制御が、自動ブレーキ適用条件を示す自動ブレーキ作動データに応答して命令される場合とである。
【0058】
まとめると、ここで記載されたような電気自動ブレーキインターロックシステムは、ブレーキメカニズム、特にブレーキアクチュエータの動作電力のためのオン/オフ制御を提供するハードウェアベースの自動ブレーキインターロックパスと、ブレーキメカニズムのためのブレーキ作動制御コマンドを生成するソフトウェアベースの処理パスとを有する自動ブレーキ制御アーキテクチャを用いる。この方策により、命令していないのに自動ブレーキが適用される確率は、ハードウェアインターロック障害およびソフトウェア制御障害の両方の確率であり、実際の実施において非常に低い。共通のコンポーネントは、自動ブレーキアクチュエータモータとモータ制御部(自身でコマンドを出すことはあまりない)
とデジタルTRAデータの源とだけである。
【0059】
少なくとも1つの例示的な実施例が上記の詳細な説明において提示されたが、膨大な数の変形例が存在することは理解されるべきである。ここで記載された例示的な実施例は、いかなる点においても、この発明の範囲、適用可能性、または構成を限定することを意図していないということをも理解されるべきである。むしろ、上記の詳細な説明は、記載した実施例を実施するための簡便な道筋を当業者に与えるものである。この発明の範囲から逸脱することがなければ、要素の機能および構成においてさまざまな変更がなされ得、この発明の範囲は、この特許出願が出願される際に公知の均等物および予見可能な均等物を含む特許請求の範囲によって規定される。
【特許請求の範囲】
【請求項1】
航空機の電気ブレーキシステムのための自動ブレーキインターロックのための制御構成であって、
前記電気ブレーキシステムのブレーキメカニズムのための動作電力を有効/無効にするよう構成される自動ブレーキアクチュエータ電力制御アーキテクチャと、
前記自動ブレーキアクチュエータ電力制御アーキテクチャと並列である自動ブレーキアクチュエータコマンドアーキテクチャとを含み、前記自動ブレーキアクチュエータコマンドアーキテクチャは前記ブレーキメカニズムのためのブレーキメカニズムコマンドを処理するよう構成されており、
前記自動ブレーキアクチュエータ電力制御アーキテクチャは、前記自動ブレーキアクチュエータコマンドアーキテクチャから独立して、前記ブレーキメカニズムの作動を防止することが可能であり、
前記自動ブレーキアクチュエータコマンドアーキテクチャは、前記自動ブレーキアクチュエータ電力制御アーキテクチャから独立して、前記ブレーキメカニズムの作動を防止することが可能である、制御構成。
【請求項2】
前記自動ブレーキアクチュエータ電力制御アーキテクチャは、自動ブレーキ作動データを処理するとともに、前記自動ブレーキ作動データに応答して、前記ブレーキメカニズムの電力供給についての有効/無効制御信号を生成するよう構成されるインターロック決定モジュールを含む、請求項1に記載の制御構成。
【請求項3】
前記自動ブレーキ作動データは、
左側スロットルレゾルバ角度(TRA)センサデータと、
右側TRAセンサデータとを含む、請求項2に記載の制御構成。
【請求項4】
前記インターロック決定モジュールは、前記自動ブレーキ作動データが自動ブレーキ適用条件を示す際、前記ブレーキメカニズムのための動作電力を有効にするよう構成される、請求項2に記載の制御構成。
【請求項5】
前記電気ブレーキシステムは前記ブレーキメカニズムに結合される電気ブレーキアクチュエータ制御部を含み、
前記自動ブレーキアクチュエータ電力制御アーキテクチャは、前記電気ブレーキアクチュエータ制御部のための動作電力を調節するよう構成される、請求項1に記載の制御構成。
【請求項6】
前記自動ブレーキアクチュエータコマンドアーキテクチャは、自動ブレーキ作動データに応答して前記ブレーキメカニズムコマンドを生成するよう構成される自動ブレーキコマンド制御部を含む、請求項1に記載の制御構成。
【請求項7】
前記自動ブレーキ作動データは、
左側スロットルレゾルバ角度(TRA)センサデータと、
右側TRAセンサデータとを含む、請求項6に記載の制御アーキテクチャ。
【請求項8】
前記電気ブレーキシステムは、前記ブレーキメカニズムに結合される電気ブレーキアクチュエータ制御部を含み、
前記自動ブレーキコマンド制御部は、前記電気ブレーキアクチュエータ制御部による実行のために前記ブレーキメカニズムコマンドを生成するよう構成される、請求項6に記載の制御アーキテクチャ。
【請求項9】
航空機の電気ブレーキシステムのための自動ブレーキインターロックを提供するための方法であって、前記電気ブレーキシステムはブレーキメカニズムを有し、前記方法は、
(a) 自動ブレーキ作動データを受取ることと、
(b) 前記自動ブレーキ作動データを処理することとを含み、前記自動ブレーキ作動データは離散TRAデータを含み、前記方法はさらに、
(c) 前記離散TRAデータが自動ブレーキ適用条件を示さない場合、前記ブレーキメカニズムのための動作電力を調節し、前記ブレーキメカニズムを一時的に無効にすることを含み、前記方法はさらに、
(b)および(c)と同時にかつ独立して、
(e) 前記自動ブレーキ作動データを処理することを含み、前記自動ブレーキ作動データはTRAデジタルデータを含み、前記方法はさらに、
(f) 前記TRAデジタルデータが前記自動ブレーキ適用条件を示さない場合、自動ブレーキ作動制御コマンドの生成を防止することと、
(g) 前記ブレーキメカニズムの作動を防止することとを含む、方法。
【請求項10】
前記電気ブレーキシステムは、前記ブレーキメカニズムに結合される電気ブレーキアクチュエータを含み、
前記ブレーキメカニズムのための動作電力を調節することは、前記電気ブレーキアクチュエータから動作電力を取除くことを含む、請求項9に記載の方法。
【請求項11】
(h) 前記動作電力が前記電気ブレーキアクチュエータを有効にするよう与えられ、
(i) 前記ブレーキ作動制御コマンドが生成され、かつ
(j) 前記ブレーキ作動制御コマンドが前記電気ブレーキアクチュエータによって受取られるならば、
前記自動ブレーキ作動条件を検出することに応答して前記電気ブレーキアクチュエータを制御することをさらに含む、請求項10に記載の方法。
【請求項12】
前記離散TRAデータは、前記動作電力を調節するための有効/無効制御信号を生成する、請求項10に記載の方法。
【請求項13】
航空機のための電気自動ブレーキインターロックシステムであって、
前記航空機の第1の車輪のための第1のブレーキメカニズムと、
前記第1のブレーキメカニズムに結合される第1の自動ブレーキ制御アーキテクチャとを含み、前記第1の自動ブレーキ制御アーキテクチャは、
自動ブレーキ作動データに応答して、前記第1のブレーキメカニズムのためのブレーキメカニズムコマンド信号を生成するよう構成される第1の自動ブレーキコマンド制御部と、
前記第1の自動ブレーキコマンド制御部の動作と同時にかつ前記第1の自動ブレーキコマンド制御部から独立して、前記自動ブレーキ作動データに応答して前記第1のブレーキメカニズムのための動作電力を調節するよう構成される第1の自動ブレーキインターロックメカニズムを含む、電気自動ブレーキインターロックシステム。
【請求項14】
前記航空機の第2の車輪のための第2のブレーキメカニズムと、
前記第2のブレーキメカニズムに結合される第2の自動ブレーキ制御アーキテクチャとを含み、前記第2の自動ブレーキ制御アーキテクチャは、
前記自動ブレーキ作動データに応答して、前記第2のブレーキメカニズムのためのブレーキメカニズムコマンド信号を生成するよう構成される第2の自動ブレーキコマンド制御部と、
前記第2の自動ブレーキコマンド制御部の動作と同時に、かつ、前記第2の自動ブレーキコマンド制御部から独立して、前記自動ブレーキ作動データに応答して前記第2のブレ
ーキメカニズムのための動作電力を調節するよう構成される第2の自動ブレーキインターロックメカニズムとを含む、請求項13に記載のシステム。
【請求項15】
前記第2の自動ブレーキ制御アーキテクチャは、前記第1の自動ブレーキ制御アーキテクチャと同時にかつ独立して動作する、請求項14に記載のシステム。
【請求項16】
前記第1の自動ブレーキインターロックメカニズムは、前記第1のブレーキメカニズムのための動作電力を有効/無効にするよう構成される自動ブレーキアクチュエータ電力制御アーキテクチャに存在し、
前記第1の自動ブレーキコマンド制御部は、前記自動ブレーキアクチュエータ電力制御アーキテクチャと並列である自動ブレーキアクチュエータコマンドアーキテクチャに存在し、前記自動ブレーキアクチュエータコマンドアーキテクチャは、前記第1のブレーキメカニズムのための前記ブレーキメカニズム制御信号を処理するよう構成される、請求項13に記載のシステム。
【請求項17】
前記自動ブレーキアクチュエータ電力制御アーキテクチャは、前記自動ブレーキアクチュエータコマンドアーキテクチャから独立して、前記第1のブレーキメカニズムの作動を防止することが可能であり、
前記自動ブレーキアクチュエータコマンドアーキテクチャは、前記自動ブレーキアクチュエータ電力制御アーキテクチャから独立して、前記第1のブレーキメカニズムの作動を防止することが可能である、請求項16に記載のシステム。
【請求項18】
前記自動ブレーキアクチュエータ電力制御アーキテクチャは、
前記自動ブレーキ作動データを処理するよう構成されており、かつ
前記自動ブレーキ作動データに応答して、前記第1のブレーキメカニズムの電力供給のための有効/無効制御信号を生成するよう構成される自動ブレーキインターロック決定モジュールを含む、請求項16に記載のシステム。
【請求項19】
前記インターロック決定モジュールは、前記自動ブレーキ作動データが自動ブレーキ適用条件を示す際に、前記第1のブレーキメカニズムのための動作電力を有効にするよう構成される、請求項18に記載のシステム。
【請求項20】
前記インターロック決定モジュールは、前記自動ブレーキ作動データが自動ブレーキ適用条件を示さない際に、前記第1のブレーキメカニズムのための動作電力を無効にするよう構成される、請求項18に記載のシステム。
【請求項1】
航空機の電気ブレーキシステムのための自動ブレーキインターロックのための制御構成であって、
前記電気ブレーキシステムのブレーキメカニズムのための動作電力を有効/無効にするよう構成される自動ブレーキアクチュエータ電力制御アーキテクチャと、
前記自動ブレーキアクチュエータ電力制御アーキテクチャと並列である自動ブレーキアクチュエータコマンドアーキテクチャとを含み、前記自動ブレーキアクチュエータコマンドアーキテクチャは前記ブレーキメカニズムのためのブレーキメカニズムコマンドを処理するよう構成されており、
前記自動ブレーキアクチュエータ電力制御アーキテクチャは、前記自動ブレーキアクチュエータコマンドアーキテクチャから独立して、前記ブレーキメカニズムの作動を防止することが可能であり、
前記自動ブレーキアクチュエータコマンドアーキテクチャは、前記自動ブレーキアクチュエータ電力制御アーキテクチャから独立して、前記ブレーキメカニズムの作動を防止することが可能である、制御構成。
【請求項2】
前記自動ブレーキアクチュエータ電力制御アーキテクチャは、自動ブレーキ作動データを処理するとともに、前記自動ブレーキ作動データに応答して、前記ブレーキメカニズムの電力供給についての有効/無効制御信号を生成するよう構成されるインターロック決定モジュールを含む、請求項1に記載の制御構成。
【請求項3】
前記自動ブレーキ作動データは、
左側スロットルレゾルバ角度(TRA)センサデータと、
右側TRAセンサデータとを含む、請求項2に記載の制御構成。
【請求項4】
前記インターロック決定モジュールは、前記自動ブレーキ作動データが自動ブレーキ適用条件を示す際、前記ブレーキメカニズムのための動作電力を有効にするよう構成される、請求項2に記載の制御構成。
【請求項5】
前記電気ブレーキシステムは前記ブレーキメカニズムに結合される電気ブレーキアクチュエータ制御部を含み、
前記自動ブレーキアクチュエータ電力制御アーキテクチャは、前記電気ブレーキアクチュエータ制御部のための動作電力を調節するよう構成される、請求項1に記載の制御構成。
【請求項6】
前記自動ブレーキアクチュエータコマンドアーキテクチャは、自動ブレーキ作動データに応答して前記ブレーキメカニズムコマンドを生成するよう構成される自動ブレーキコマンド制御部を含む、請求項1に記載の制御構成。
【請求項7】
前記自動ブレーキ作動データは、
左側スロットルレゾルバ角度(TRA)センサデータと、
右側TRAセンサデータとを含む、請求項6に記載の制御アーキテクチャ。
【請求項8】
前記電気ブレーキシステムは、前記ブレーキメカニズムに結合される電気ブレーキアクチュエータ制御部を含み、
前記自動ブレーキコマンド制御部は、前記電気ブレーキアクチュエータ制御部による実行のために前記ブレーキメカニズムコマンドを生成するよう構成される、請求項6に記載の制御アーキテクチャ。
【請求項9】
航空機の電気ブレーキシステムのための自動ブレーキインターロックを提供するための方法であって、前記電気ブレーキシステムはブレーキメカニズムを有し、前記方法は、
(a) 自動ブレーキ作動データを受取ることと、
(b) 前記自動ブレーキ作動データを処理することとを含み、前記自動ブレーキ作動データは離散TRAデータを含み、前記方法はさらに、
(c) 前記離散TRAデータが自動ブレーキ適用条件を示さない場合、前記ブレーキメカニズムのための動作電力を調節し、前記ブレーキメカニズムを一時的に無効にすることを含み、前記方法はさらに、
(b)および(c)と同時にかつ独立して、
(e) 前記自動ブレーキ作動データを処理することを含み、前記自動ブレーキ作動データはTRAデジタルデータを含み、前記方法はさらに、
(f) 前記TRAデジタルデータが前記自動ブレーキ適用条件を示さない場合、自動ブレーキ作動制御コマンドの生成を防止することと、
(g) 前記ブレーキメカニズムの作動を防止することとを含む、方法。
【請求項10】
前記電気ブレーキシステムは、前記ブレーキメカニズムに結合される電気ブレーキアクチュエータを含み、
前記ブレーキメカニズムのための動作電力を調節することは、前記電気ブレーキアクチュエータから動作電力を取除くことを含む、請求項9に記載の方法。
【請求項11】
(h) 前記動作電力が前記電気ブレーキアクチュエータを有効にするよう与えられ、
(i) 前記ブレーキ作動制御コマンドが生成され、かつ
(j) 前記ブレーキ作動制御コマンドが前記電気ブレーキアクチュエータによって受取られるならば、
前記自動ブレーキ作動条件を検出することに応答して前記電気ブレーキアクチュエータを制御することをさらに含む、請求項10に記載の方法。
【請求項12】
前記離散TRAデータは、前記動作電力を調節するための有効/無効制御信号を生成する、請求項10に記載の方法。
【請求項13】
航空機のための電気自動ブレーキインターロックシステムであって、
前記航空機の第1の車輪のための第1のブレーキメカニズムと、
前記第1のブレーキメカニズムに結合される第1の自動ブレーキ制御アーキテクチャとを含み、前記第1の自動ブレーキ制御アーキテクチャは、
自動ブレーキ作動データに応答して、前記第1のブレーキメカニズムのためのブレーキメカニズムコマンド信号を生成するよう構成される第1の自動ブレーキコマンド制御部と、
前記第1の自動ブレーキコマンド制御部の動作と同時にかつ前記第1の自動ブレーキコマンド制御部から独立して、前記自動ブレーキ作動データに応答して前記第1のブレーキメカニズムのための動作電力を調節するよう構成される第1の自動ブレーキインターロックメカニズムを含む、電気自動ブレーキインターロックシステム。
【請求項14】
前記航空機の第2の車輪のための第2のブレーキメカニズムと、
前記第2のブレーキメカニズムに結合される第2の自動ブレーキ制御アーキテクチャとを含み、前記第2の自動ブレーキ制御アーキテクチャは、
前記自動ブレーキ作動データに応答して、前記第2のブレーキメカニズムのためのブレーキメカニズムコマンド信号を生成するよう構成される第2の自動ブレーキコマンド制御部と、
前記第2の自動ブレーキコマンド制御部の動作と同時に、かつ、前記第2の自動ブレーキコマンド制御部から独立して、前記自動ブレーキ作動データに応答して前記第2のブレ
ーキメカニズムのための動作電力を調節するよう構成される第2の自動ブレーキインターロックメカニズムとを含む、請求項13に記載のシステム。
【請求項15】
前記第2の自動ブレーキ制御アーキテクチャは、前記第1の自動ブレーキ制御アーキテクチャと同時にかつ独立して動作する、請求項14に記載のシステム。
【請求項16】
前記第1の自動ブレーキインターロックメカニズムは、前記第1のブレーキメカニズムのための動作電力を有効/無効にするよう構成される自動ブレーキアクチュエータ電力制御アーキテクチャに存在し、
前記第1の自動ブレーキコマンド制御部は、前記自動ブレーキアクチュエータ電力制御アーキテクチャと並列である自動ブレーキアクチュエータコマンドアーキテクチャに存在し、前記自動ブレーキアクチュエータコマンドアーキテクチャは、前記第1のブレーキメカニズムのための前記ブレーキメカニズム制御信号を処理するよう構成される、請求項13に記載のシステム。
【請求項17】
前記自動ブレーキアクチュエータ電力制御アーキテクチャは、前記自動ブレーキアクチュエータコマンドアーキテクチャから独立して、前記第1のブレーキメカニズムの作動を防止することが可能であり、
前記自動ブレーキアクチュエータコマンドアーキテクチャは、前記自動ブレーキアクチュエータ電力制御アーキテクチャから独立して、前記第1のブレーキメカニズムの作動を防止することが可能である、請求項16に記載のシステム。
【請求項18】
前記自動ブレーキアクチュエータ電力制御アーキテクチャは、
前記自動ブレーキ作動データを処理するよう構成されており、かつ
前記自動ブレーキ作動データに応答して、前記第1のブレーキメカニズムの電力供給のための有効/無効制御信号を生成するよう構成される自動ブレーキインターロック決定モジュールを含む、請求項16に記載のシステム。
【請求項19】
前記インターロック決定モジュールは、前記自動ブレーキ作動データが自動ブレーキ適用条件を示す際に、前記第1のブレーキメカニズムのための動作電力を有効にするよう構成される、請求項18に記載のシステム。
【請求項20】
前記インターロック決定モジュールは、前記自動ブレーキ作動データが自動ブレーキ適用条件を示さない際に、前記第1のブレーキメカニズムのための動作電力を無効にするよう構成される、請求項18に記載のシステム。
【図1】


【図2】
【図3】
【図4】
【図5】

【図2】
【図3】
【図4】
【図5】
【公表番号】特表2010−514608(P2010−514608A)
【公表日】平成22年5月6日(2010.5.6)
【国際特許分類】
【出願番号】特願2009−543244(P2009−543244)
【出願日】平成19年12月20日(2007.12.20)
【国際出願番号】PCT/US2007/088471
【国際公開番号】WO2008/127476
【国際公開日】平成20年10月23日(2008.10.23)
【出願人】(500520743)ザ・ボーイング・カンパニー (773)
【氏名又は名称原語表記】The Boeing Company
【Fターム(参考)】
【公表日】平成22年5月6日(2010.5.6)
【国際特許分類】
【出願日】平成19年12月20日(2007.12.20)
【国際出願番号】PCT/US2007/088471
【国際公開番号】WO2008/127476
【国際公開日】平成20年10月23日(2008.10.23)
【出願人】(500520743)ザ・ボーイング・カンパニー (773)
【氏名又は名称原語表記】The Boeing Company
【Fターム(参考)】
[ Back to top ]