
航空機をタキシングするための操舵方法
【課題】航空機タキシングのための方法、非一時的なコンピュータ可読媒体、および航空機を提供すること。
【解決手段】特定の一方法は、曲線区間を有する誘導路に対して相対的な航空機の場所を決定する。方法は、曲線区間の少なくとも第1の部分を通って航空機を操舵するための第1の前脚ステアリング角度を決定する。第1の前脚ステアリング角度は、航空機の前脚を誘導路中心線から逸れさせるように選択される。第1の前脚ステアリング角度は、曲線区間の少なくとも第1の部分を航空機が横断する際に航空機のステアリングポイントをほぼ誘導路中心線の上に保持するように選択される。ステアリングポイントは、航空機の前脚と主脚との間に位置する。
【解決手段】特定の一方法は、曲線区間を有する誘導路に対して相対的な航空機の場所を決定する。方法は、曲線区間の少なくとも第1の部分を通って航空機を操舵するための第1の前脚ステアリング角度を決定する。第1の前脚ステアリング角度は、航空機の前脚を誘導路中心線から逸れさせるように選択される。第1の前脚ステアリング角度は、曲線区間の少なくとも第1の部分を航空機が横断する際に航空機のステアリングポイントをほぼ誘導路中心線の上に保持するように選択される。ステアリングポイントは、航空機の前脚と主脚との間に位置する。
【発明の詳細な説明】
【技術分野】
【0001】
本開示は一般に、航空機のタキシングに関する。
【背景技術】
【0002】
大型の商用航空機は、長い軸距を有する場合がある。軸距は、航空機の中心線に沿った、航空機の前脚と主脚との間の距離である。航空機の軸距が長いと、ターンを実行しながら誘導路の表面上に主着陸脚を保持するのが困難になる場合がある。
【0003】
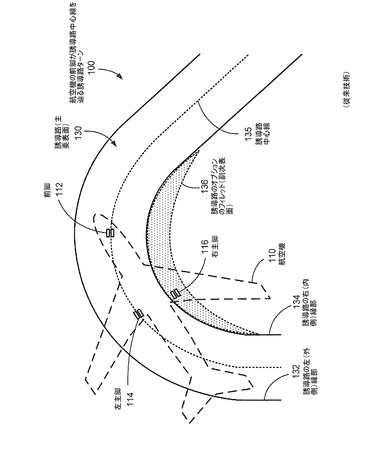
図1は、誘導路ターン100を航行しようとする航空機110を示す従来技術の図であり、航空機110の前脚112が誘導路中心線135を辿る。航空機110の脚112、114、および116が、誘導路130の表面上(すなわち誘導路130の左(外側)縁部132と誘導路130の右(内側)縁部134との間)に留まることが望ましいであろう。しかし、前脚112が誘導路中心線135を辿るとき、右主脚116が誘導路130の右(内側)縁部134を越えることがある。そのため、右主脚116は誘導路130の表面を離れることがある。図1には、誘導路130が、オプションのフィレット136によって誘導路130の右(内側)縁部134に隣接して拡張されているのを示す。オプションのフィレット136は、十分に広ければ、追加の舗装表面を形成して右主脚116を支持する。オプションのフィレット136がなければ、右主脚116は誘導路130の表面を離れることがある。
【0004】
前脚112または主脚114および116が誘導路の表面を離れることは、重大な問題を生む場合がある。例えば、脚112、114、および116のいずれかが誘導路130の表面を離れると、航空機110が押し動かされて、乗客に怪我を負わせるかまたは航空機110およびその積み荷に損傷を与えることがある。さらに、誘導路130の路肩が柔らかい場合、路肩に乗り上げた脚112、114、および116のいずれかが路肩に沈み込み、航空機が立ち往生することがある。これらの懸念により、いくつかの誘導路の表面は、ターンにおいて拡張されて(フィレット136などのフィレットを使用して)、全ての脚を誘導路上に維持しようとする。
【0005】
前脚112ならびに主脚114および116を誘導路130上に保持するために、多くのオペレータは、前脚112を「オーバーステア」する。オーバーステアリングは、前脚112を誘導路中心線135よりも向こうに操舵して、ターン内側の主脚(例えば、図1に示すような右側ターンの場合の右主脚116)が誘導路130の表面を離れないようにしようとすることを伴う。前脚112が誘導路中心線135を越えて遠くに操舵され過ぎると、前脚112が誘導路130の表面から離れていく場合がある。他方、前脚112が誘導路中心線135を越えて十分遠くに操舵されないと、右主脚116(図1に示すような右側ターンの場合。または、左側ターンの場合は左主脚114)が誘導路130の表面から離れていく場合がある。
【発明の概要】
【発明が解決しようとする課題】
【0006】
ターン中に前脚および主脚が誘導路の表面から離れていかないように航空機を誘導路上で操舵するのを補助するための方法、非一時的なコンピュータ可読記憶媒体、および航空機を開示する。航空機を誘導路の表面上に維持するために、航空機の中心線に沿ってステアリングポイントが選択される。ステアリングポイントは、前脚と、主脚の軸が航空機の中心線と交差するポイントとの間とすることができる。航空機を誘導路の表面上に維持するために、前脚が「オーバーステア」されて(すなわち誘導路中心線の外側に操舵されて)、ステアリングポイントが誘導路中心線を辿るようにする。ステアリングポイントが誘導路中心線を辿ることにより、航空機は、どの脚も誘導路の表面を離れることなく、ターンを完了することができる。誘導路の拡張は必要とされない。
【0007】
ターンはセグメントに分割することができる。各セグメントにつき、ステアリングポイントを誘導路中心線の上に維持するための前脚ステアリング角度を決定することができる。決定された前脚ステアリング角度を使用して、前脚を自動的に方向付けることができる。別法として、前脚ステアリング角度をオペレータに提示して、オペレータが前脚を正しく操舵するのを補助することができる。
【課題を解決するための手段】
【0008】
特定の一実施形態では、方法が、曲線区間を有する誘導路に対して相対的な航空機の場所を決定する。方法は、曲線区間の少なくとも第1の部分を通って航空機を操舵するための第1の前脚ステアリング角度を決定する。第1の前脚ステアリング角度は、航空機の前脚を誘導路中心線から逸れさせるように選択される。第1の前脚ステアリング角度は、曲線区間の少なくとも第1の部分を航空機が横断する際に航空機のステアリングポイントをほぼ誘導路中心線の上に保持するように選択される。ステアリングポイントは、航空機の前脚と主脚との間に位置する。
【0009】
別の特定の実施形態では、非一時的なコンピュータ可読記憶媒体が、プロセッサによって実行可能な命令を記憶する。曲線区間を有する誘導路に対して相対的な航空機の場所に基づいて、プロセッサによって実行可能な命令は、曲線区間の少なくとも第1の部分を通って航空機を操舵するための第1の前脚ステアリング角度を自動的に決定する。第1の前脚ステアリング角度は、航空機の前脚を誘導路中心線から逸れさせるように選択される。第1の前脚ステアリング角度は、曲線区間の少なくとも第1の部分を航空機が横断する際に航空機のステアリングポイントをほぼ誘導路中心線の上に保持するように選択される。プロセッサによって実行可能な命令はまた、航空機が第1の前脚ステアリング角度に従って操舵されるのを可能にするように動作可能な信号を生成する。
【0010】
別の特定の実施形態では、航空機が、中心線を有する胴体を備える。前脚が胴体から延びる。前脚は、曲線区間を含む誘導路の一部に沿って航空機を方向付けるように操舵される。主脚もまた胴体から延びる。推進システムが、誘導路に沿ってタキシングするために航空機に動力供給するように動作する。前脚ステアリングシステムが、プロセッサと、プロセッサに動作可能に結合され位置信号を受信するように構成された受信機と、プロセッサによって実行可能な命令を含むメモリとを備える。メモリ中の命令は、位置信号に基づいて、誘導路に対して相対的な航空機の場所を決定する。メモリ中の命令はまた、曲線区間の少なくとも第1の部分を通って航空機を操舵するための第1の前脚ステアリング角度を決定する。第1の前脚ステアリング角度は、航空機の前脚を誘導路中心線から逸れさせるように選択される。第1の前脚ステアリング角度は、曲線区間の少なくとも第1の部分を航空機が横断する際に航空機のステアリングポイントをほぼ誘導路中心線の上に保持するように選択される。
【0011】
述べる特徴、機能、および利点は、様々な実施形態で独立して達成することができ、あるいはさらに他の実施形態で組み合わせてもよく、これに関する更なる詳細は、以下の記述および図面を参照しながら開示する。
【0012】
本発明は、以下にも関係する。
【0013】
1.曲線区間を有する誘導路に対して相対的な航空機の場所を決定するステップと、
曲線区間の少なくとも第1の部分を通って航空機を操舵するための第1の前脚ステアリング角度を決定するステップとを含む方法であって、第1の前脚ステアリング角度が、航空機の前脚を誘導路中心線から逸れさせるように、かつ曲線区間の少なくとも第1の部分を航空機が横断する際に航空機のステアリングポイントをほぼ誘導路中心線の上に保持するように選択され、ステアリングポイントが航空機の前脚と主脚との間に位置する、方法。
【0014】
2.ステアリングポイントが航空機の中心線上にある、項目1に記載の方法。
【0015】
3.ステアリングポイントが、前脚と主脚との間の距離、航空機の中心線と主脚との間の距離、またはこれらのいずれかの組合せに基づいて選択される、項目2に記載の方法。
【0016】
4.ステアリング角度が、
第1の部分の曲率半径と、
ステアリングポイントから第1の部分の終点までの直線距離と、
航空機の中心線に沿った、主脚からステアリングポイントまでの距離と、
航空機の中心線に沿った、主脚から前脚までの距離と、
主脚軸に沿った、第1の部分の曲率半径の原点と航空機の中心線との間の距離とに少なくとも部分的に基づいて決定される、項目3に記載の方法。
【0017】
5.第1の部分の終点を自動的に選択するステップであって、終点が誘導路の中心線上にあるステップと、
第1の部分の曲率半径、および曲率半径の原点の位置を自動的に決定するステップとをさらに含む、項目4に記載の方法。
【0018】
6.曲率半径に基づくステアリングポイントにおける第1の部分の曲線に接する線とステアリングポイントから終点までの直線との間の第1の角度と、終点までの直線距離と、航空機の中心線に沿った主脚からステアリングポイントまでの距離とを推定するステップをさらに含む、項目5に記載の方法。
【0019】
7.推定された第1の角度に基づいて、航空機の中心線と、第1の部分の曲線に接する線との間の第2の角度を決定するステップをさらに含む、項目6に記載の方法。
【0020】
8.第2の角度と、航空機の中心線に沿った主脚からステアリングポイントまでの距離と、主脚の軸に垂直なポイントにおける航空機の中心線から第1の部分の曲率半径の原点までの距離とに基づいてステアリング角度を決定するステップをさらに含む、項目7に記載の方法。
【0021】
9.ステアリングポイントが第1の部分の終点に近いと決定することに応答して曲線の第2の部分を選択するステップをさらに含む、項目1に記載の方法。
【0022】
10.第2の部分を通してステアリングポイントを航空機の中心線の上に維持するための第2のステアリング角度を決定するステップをさらに含む、項目9に記載の方法。
【0023】
11.誘導路に対して相対的な航空機の場所を決定するステップが、
航空機の位置を示す信号を受信して航空機の位置を誘導路の電子マップと比較するステップと、
光学システムとレーザ撮像検出および測距(LIDAR)システムとの少なくとも一方を使用して複数の参照インジケータに対して相対的な航空機の場所を決定するステップとのうちの1つまたは複数を含む、項目1に記載の方法。
【0024】
12.前脚をステアリング角度で自動的に位置決めするステップをさらに含む、項目1に記載の方法。
【0025】
13.航空機のオペレータが前脚をステアリング角度に調整および位置決めできるようにするための情報を航空機のオペレータに提供するオペレータ信号を生成するステップをさらに含む、項目1に記載の方法。
【0026】
14.航空機のヘッドアップ表示装置を介してオペレータ信号を航空機のオペレータに対して表示するステップをさらに含む、項目13に記載の方法。
【0027】
15.ステアリング角度が、曲線区間を航空機が横断する間に主脚を誘導路の主要タキシング表面内に留まらせるように選択される、項目1に記載の方法。
【0028】
16.航空機がステアリング角度に従って曲線を通って操舵されるとき、主脚のどの部分も誘導路のフィレットに入らない、項目1に記載の方法。
【0029】
17.プロセッサによって実行可能な命令を記憶した非一時的なコンピュータ可読記憶媒体であって、命令が、
曲線区間を有する誘導路に対して相対的な航空機の場所に基づいて、曲線区間の少なくとも第1の部分を通って航空機を操舵するための第1の前脚ステアリング角度を自動的に決定するための命令であって、第1の前脚ステアリング角度が、航空機の前脚を誘導路中心線から逸れさせるように、かつ曲線区間の少なくとも第1の部分を航空機が横断する際に航空機のステアリングポイントをほぼ誘導路中心線の上に保持するように選択される命令と、
航空機が第1の前脚ステアリング角度に従って操舵されるように動作可能な信号を生成するための命令とである、非一時的なコンピュータ可読記憶媒体。
【0030】
18.曲線区間を有する誘導路に対して相対的な航空機の場所が、
航空機の位置を示す信号を受信すること、および
航空機の位置を誘導路の電子マップと比較することによって決定される、項目17に記載の非一時的なコンピュータ可読記憶媒体。
【0031】
19.信号が、
航空機を第1の前脚ステアリング角度に従って操舵するように構成された自動タキシングシステムに提示される制御信号と、
第1の前脚ステアリング角度を示す表示装置に提示されるオペレータ信号とのうちの一方を含む、項目17に記載の非一時的なコンピュータ可読記憶媒体。
【0032】
20.中心線を有する胴体と、
胴体から延びる前脚であって、曲線区間を含む誘導路の一部に沿って航空機を方向付けるように操舵可能な前脚と、
胴体から延びる主脚と、
誘導路に沿ってタキシングするために航空機に動力供給するように動作可能な推進システムと、
前脚ステアリングシステムとを備える航空機であって、前脚ステアリングシステムが、
プロセッサと、
プロセッサに動作可能に結合され位置信号を受信するように構成された受信機と、
プロセッサによって実行可能な命令を含むメモリとを備え、命令が、
位置信号に基づいて誘導路に対して相対的な航空機の場所を決定するための命令と、
曲線区間の少なくとも第1の部分を通って航空機を操舵するための第1の前脚ステアリング角度を決定するための命令とであり、第1の前脚ステアリング角度が、航空機の前脚を誘導路中心線から逸れさせるように、かつ曲線区間の少なくとも第1の部分を航空機が横断する際に航空機のステアリングポイントをほぼ誘導路中心線の上に保持するように選択される、航空機。
【図面の簡単な説明】
【0033】
【図1】航空機の前脚が誘導路中心線を辿る、誘導路ターンを横断する航空機を示す図である(従来技術)。
【図2】航空機をタキシングするための操舵方法の一実施形態による、ステアリングポイントが誘導路中心線を辿る、図1の誘導路ターンを横断する航空機を示す図である。
【図3】航空機をタキシングするための操舵方法の一実施形態による、誘導路中心線が複数のセグメントと見なされて前脚ステアリング角度が決定される、誘導路ターンの図である。
【図4】航空機をタキシングするための操舵方法の一実施形態による、ターンの第1の部分を通って操舵される航空機の図であって、誘導路ターンのポイントにおける前脚ステアリング角度を決定するのに使用される距離および角度を示すための図である。
【図5】航空機をタキシングするための操舵方法の一実施形態による、航空機が前脚ステアリングシステムを使用する、空港または飛行場のブロック図である。
【図6】特定の実施形態による前脚ステアリングシステムのブロック図である。
【図7】特定の実施形態による前脚ステアリングシステムのブロック図である。
【図8】航空機をタキシングするための操舵方法の一実施形態のフローチャートである。
【図9】航空機をタキシングするための操舵方法の一実施形態のコンピュータ実装方法を実施するかまたはコンピュータ実行可能命令を処理するように動作可能な汎用コンピュータシステムのブロック図である。
【発明を実施するための形態】
【0034】
本明細書に開示する実施形態は、ターン中に前脚および主脚を誘導路の表面上に維持するように航空機を誘導路上で操舵するのを補助するための方法、非一時的なコンピュータ可読記憶媒体、および航空機を含む。ステアリングポイントが、航空機の中心線に沿って前脚と主脚との間で識別される。ステアリングポイントを使用して、前脚についてのステアリング角度が決定される。前脚が誘導路中心線を辿るのではなく、ステアリングポイントが誘導路中心線を辿るように前脚がオーバーステアされる。ステアリングポイントがほぼ誘導路中心線を辿るようにすることで、航空機は、どの脚も誘導路の表面を離れることなく、ターンを実施することができる。特定の一実施形態では、ターンをセグメントに分割することができる。全ての脚を誘導路の表面上に維持するために、前脚ステアリング角度を各セグメントにつき決定することができる。決定された前脚ステアリング角度を使用して、前脚を自動的に方向付けることができる。別法として、前脚ステアリング角度をオペレータに提示して、オペレータが航空機を正しくオーバーステアするのを補助することができる。
【0035】
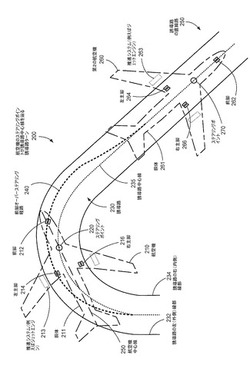
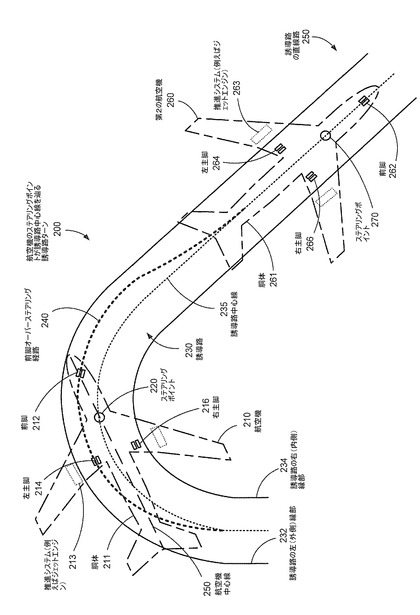
図2は、誘導路ターン200を横断する第1の航空機210および第2の航空機260を示す図である。誘導路ターン200は、図1の誘導路ターン100に類似する。しかし、図1の例とは異なり、第1の航空機210および第2の航空機260は、航空機をタキシングするための操舵方法の一実施形態により、それぞれステアリングポイント220および270を誘導路中心線235の上に維持することによって誘導路ターン200を航行する。対照的に、図1では、前脚112が誘導路中心線135を辿り、これにより主脚114と116の一方が誘導路130の表面を離れることがある。
【0036】
第1の航空機210は、前脚212と左主脚214と右主脚216とを支持する胴体211を備える。胴体211はまた、1つまたは複数のジェットエンジンを含むことのできる推進システム213を支持する。図2に示す実施形態では、第1の航空機210の前脚212は、誘導路中心線235から外れるように操舵される。その代わり、前脚212は、前脚オーバーステアリング経路240を辿る。ステアリングポイント220は、前脚212と主脚214および216との間のポイントで選択することができる。ステアリングポイント220は、後でさらに述べるように、全ての脚212、214、および216を誘導路230の表面上に保持するように誘導路中心線235に沿って移動するための中間場所を識別するように選択される。前脚オーバーステアリング経路240は、ステアリングポイント220を誘導路中心線235上のあるポイントから誘導路中心線235上の次のポイントに進めるように、第1の航空機210を誘導路ターン200の複数のセグメントを通って操舵する結果である。ステアリングポイント220を誘導路中心線235に沿って進めることにより、右主脚216は、図2の誘導路ターン200中で誘導路230の右(内側)縁部234内に留まる。脚212、214、および216を誘導路230の縁部232および234内に維持することで、第1の航空機210は、第1の航空機210のタキシングを容易にするための副次表面を形成するためにフィレット(図1のオプションのフィレット136など)を含める必要なしに、誘導路230の主要表面上でターンさせることができる。
【0037】
オーバーステアリングは、誘導路ターン200などの誘導路ターン上でのみ、行うに値することに留意されたい。誘導路が直線コースを呈するときは、前脚とステアリングポイントの両方が誘導路中心線に沿って進むことができる。図2を参照すると、第2の航空機260は、誘導路ターン200を過ぎた誘導路の直線路250を辿る。第2の航空機260は、前脚262と左主脚264と右主脚266とを支持する胴体261を備える。胴体261はまた、1つまたは複数のジェットエンジンを含むことのできる推進システム263を支持する。誘導路の直線路250上では、全ての脚262、264、および266が誘導路230の表面上に留まった状態で、第2の航空機260の前脚262とステアリングポイント270の両方が誘導路中心線235を辿る。
【0038】
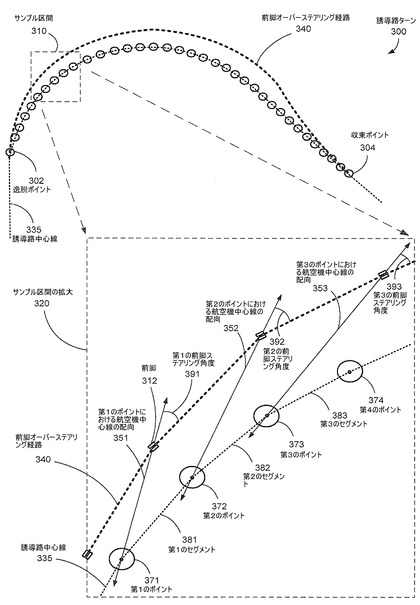
図3は誘導路ターン300の図であり、この図では、誘導路中心線335が複数のセグメントと見なされて、航空機を前脚オーバーステアリング経路340に沿って方向付けるのに使用される前脚ステアリング角度391〜393が決定される。前脚オーバーステアリング経路340は、図2にも示したように、誘導路が直線コースをとるときは誘導路中心線335を辿る。しかし、誘導路ターン300の始まりでは、特定の例示的な一実施形態によれば、前脚オーバーステアリング経路340が誘導路中心線335から逸脱する逸脱ポイント302がある。逸脱ポイント302で、前脚312は、誘導路中心線335から逸れることができる。前脚312はオーバーステアされて、ステアリングポイント(第1のポイント371、第2のポイント372、および第3のポイント373として段階を追って誘導路中心線335に沿って周期的に示されている)が誘導路中心線335に沿って進められる。前脚オーバーステアリング経路340が誘導路中心線335から逸脱し続けるのに伴って、前脚312は前脚オーバーステアリング経路340を辿る。誘導路ターン300の終わりの後、前脚オーバーステアリング経路340は、収束ポイント304に到達するまで誘導路中心線335に向かって収束する。
【0039】
特定の例示的な一実施形態によれば、前脚312は、航空機のステアリングポイント(やはり第1のポイント371、第2のポイント372、および第3のポイント373として段階を追って誘導路中心線335に沿って周期的に示されている)を誘導路中心線335の上に維持するように操舵される。ステアリングポイントが誘導路中心線335を追跡するようにすることで、図2に示したように、全ての脚212、214、および216は、誘導路ターン200を航行するプロセス全体を通して誘導路230の表面上に留まることができる。特定の例示的な一実施形態によれば、前脚オーバーステアリング経路340は、誘導路中心線335を誘導路中心線335に沿ったポイント間の複数のセグメントと見なすことによって決定することができる。各ポイントで、ステアリングポイントを誘導路中心線335上のあるポイントから誘導路中心線335に沿った次のポイントに移動させることのできる前脚ステアリング角度が決定される。誘導路中心線335に沿ったステアリングポイントの位置を表す複数のポイント371〜374と、ポイント371〜374を結ぶセグメント381〜383とが、図3の誘導路ターン300のサンプル区間310の拡大320中に示されている。
【0040】
特定の例示的な一実施形態では、サンプル区間310の拡大320中に示す複数のセグメント381〜383は、誘導路中心線335に沿った複数のポイント371〜374の隣接する各ポイントを結ぶ。記述を容易にするために、図3では、航空機は、図1および2に示した航空機110および210と同じ方向にタキシングするように示す。第1のポイント371(例えばステアリングポイントの第1の位置を表す)は、第1のセグメント381によって第2のポイント372(例えばステアリングポイントの第2の位置を表す)に接合される。第2のポイント372は、第2のセグメント382によって第3のポイント373に接合される。第3のポイント373は、第3のセグメント383によって第4のポイント374に接合される。セグメント381〜383のうちの1つの始まりにおけるポイント371〜373のそれぞれで、前脚ステアリング角度391〜393が決定される。前脚ステアリング角度391〜393は、前脚312における、航空機中心線の現在の配向351〜353と前脚オーバーステアリング経路340との間の角度である。前脚ステアリング角度391〜393は、ステアリングポイントが誘導路中心線335に沿って次の各ポイント372〜374にそれぞれ進むように航空機を操舵するために選択される。
【0041】
例えば、特定の例示的な一実施形態によれば、第1のポイント371では、ステアリングポイントが第1のポイント371から第1のセグメント381に沿って第2のポイント372に進むように航空機を進めることのできる第1の前脚ステアリング角度391が、前脚について決定される。第2のポイント372では、ステアリングポイントが第2のポイント372から第2のセグメント382に沿って第3のポイント373に進むように航空機を進めることのできる第2の前脚ステアリング角度392が決定される。第3のポイント373では、ステアリングポイントが第3のポイント373から第3のセグメント383に沿って第4のポイント374に進むように航空機を進めることのできる第3の前脚ステアリング角度393が決定される。誘導路ターン300に沿った誘導路中心線335を、セグメント381〜383によって結ばれる複数のポイント371〜374に分割することにより、全ての脚を誘導路の表面上に維持しながら、誘導路ターン300を通って航空機を操舵することができる。
【0042】
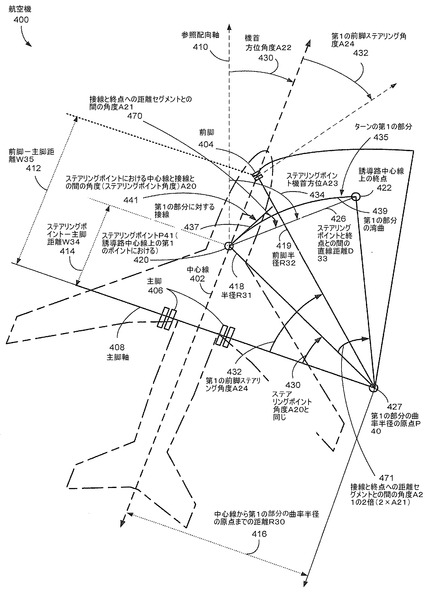
図4は、誘導路(図4には示さず)の第1の部分を通って操舵される航空機400の図である。図3に関して説明したように、誘導路中心線335は、ステアリングポイントP41 420が通過するセグメントによって接合される複数のポイントと見なすことができる。誘導路中心線335に沿った各ポイントにつき、前脚ステアリング角度を決定することができる。図4には、航空機をターンの第1の部分435を通って操舵するための第1の前脚ステアリング角度A24 432を決定するのに使用できる距離および角度を示す。第1の前脚ステアリング角度A24 432を使用してターンの第1の部分435を完了することで、ステアリングポイントP41 420は、ターンの第1の部分435の湾曲439を通って誘導路中心線上の終点422に進む。終点422は、誘導路中心線上の第1のまたは前のポイントにおけるステアリングポイントP41 420からの直線距離D33 426である。誘導路中心線上の各ポイントからターンの次の部分の終点までの一連の前脚ステアリング角度を決定することにより、前脚404および主脚406は、誘導路の表面上に留まることができる。
【0043】
特定の例示的な一実施形態によれば、ステアリングポイントP41 420は、航空機400の中心線402に沿った選択されたポイントとすることができる。より具体的には、ステアリングポイントP41 420は、前脚404と主脚軸408との間の中心線402に沿ったポイントに位置することができる。ステアリングポイントP41 420の場所は、航空機400の設計を反映させるように、前脚404と主脚406との間の距離、航空機400の中心線402と主脚406との間の距離、またはこれらの組合せに基づいて選択することができる。前脚404と主脚軸408との間の中心線402に沿った距離は、前脚−主脚距離W35 412と呼ぶことができる。ステアリングポイントP41 420と主脚軸408との間の中心線402に沿った距離は、ステアリングポイント−主脚距離W34 414と呼ぶことができる。特定の一実施形態によれば、ステアリングポイント−主脚距離W34 414は、式(1)によりオーバーステアリングパーセンテージX50に従って選択することができる。
W34=W35*(1−X50/100) (1)
【0044】
特定の例示的な一実施形態によれば、オーバーステアリングパーセンテージX50は、ランダムに選択することができる。別の例示的な一実施形態によれば、オーバーステアリングパーセンテージX50は、特定の航空機の設計に基づいてステアリングポイントP41 420についての適切な場所を決定するために、反復的に選択することができる。
【0045】
特定の例示的な一実施形態によれば、ステアリングポイントP41 420についての場所に基づいて、幾何形状を使用して、ステアリングポイントP41 420を誘導路中心線上の連続した各終点422に進めるのに使用される第1の前脚ステアリング角度A24 432を決定することができる。特定の一実施形態によれば、第1の前脚ステアリング角度A24 432は、反復的に方程式系を解いた後で別の式を解くことによって決定される。方程式系は、角度A20 441が収束するまで解く。角度A20 441は、ステアリングポイントP41 420において、航空機400の中心線402とターンの第1の部分435の湾曲439に対する接線437との間で測定される。角度A20 441は、図3に関して述べたようにステアリングポイントP41 420が中心線402の配向から操舵される角度を説明するので、ステアリングポイント角度と見なすことができる。ステアリングポイント角度A20 441は、ステアリングポイントP41 420を誘導路中心線(図4には示さず)の上に維持するように選択される。式を使用して、角度A20 441を用いて第1の前脚ステアリング角度A24 432が決定される。
【0046】
特定の例示的な一実施形態によれば、方程式系は、3つの角度に基づく。第1の角度は、ステアリングポイントP41 420において、参照配向軸410と、ステアリングポイントP41 420とターンの第1の部分435の終点422との間の直線距離D33 426を定義する線分との間で測定されるステアリングポイント機首方位A23 434である。第2の角度は、ステアリングポイントP41 420において、参照配向軸410と航空機400の中心線402との間で測定される機首方位角度A22 430である。第3の角度A21 470は、ステアリングポイントP41 420において、接線437と、ステアリングポイントP41 420と終点422との間の直線距離D33 426を定義する線分との間で測定される。
【0047】
第3の角度A21 470は、ターンの第1の部分435の曲率半径の原点P40 427で測定される、終点422へのステアリングポイントP41 420の角運動を表す角度471の2分の1である。言い換えれば、曲率半径の原点427で測定される角度471は、第3の角度A21 470の2倍(すなわち2×A21 470)である。ステアリングポイントP41 420がターンの第1の部分435の湾曲439を通って移動する際、最初は、ステアリングポイントP41 420は、ステアリングポイントP41 420と終点422との間の直線距離D33 426から離れていく方向で角度A21 470で移動することに留意されたい。次いでステアリングポイントP41 420は、ステアリングポイントP41 420が終点422に近づくにつれて、直線距離D33 426に向かっていく方向で角度A21 470で移動する。
【0048】
方程式系の第1の式は、式(2)によって与えることができる。
A20=A23−A22−A21 (2)
【0049】
特定の一実施形態では、ステアリングポイント角度A20 441の計算は、ステアリングポイント角度A20 441が量A20_TOLよりも大きいことを条件とすることができる。量A20_TOLは、0でない、小さい自由裁量の量とすることができ、ゼロ除算状態を回避するためにA20 441に制限を設ける。例えば、ゼロ除算状態は、航空機が誘導路の直線区間上を移動しているときに生じることがある。この条件は、以下によって与えることができる。
abs(A20)>A20_TOL
【0050】
この条件が満たされるときは、方程式系中の残りの式が解かれる。そうでない場合は、前脚404とステアリングポイントP41 420の両方が誘導路中心線を辿ることができ、全ての脚404および406は、前脚オーバーステアリングなしに誘導路の表面上に留まることができる。
【0051】
特定の例示的な一実施形態によれば、方程式系の第2の式は、3つの量に基づくことができる。第1の量は、ステアリングポイントP41 420と、ターンの第1の部分435の湾曲439の半径の原点427との間の半径R31 418の長さである。第2の量は、航空機400の中心線402に沿った、ステアリングポイントP41 420から主脚軸408までの距離W34 414である。第3の量は、ステアリングポイント角度A20 441の正弦である。方程式系の第2の式は、式(3)によって与えることができる。
R31=W34/sin(A20) (3)
【0052】
特定の例示的な一実施形態によれば、方程式系の第3の式は、3つの追加の量に基づくことができる。第1の量は、接線437と、ステアリングポイントP41 420と終点422との間の直線距離D33 426を定義する線分との間の、ステアリングポイントP41 420で測定される角度A21 470である。第2の量は、ステアリングポイントP41 420と終点422との間の直線距離D33 426である。第3の量は、ステアリングポイントP41 420と、ターンの第1の部分435の湾曲439の半径の原点427との間の、半径R31 418の長さである。方程式系の第3の式は、式(4)によって与えることができる。
A21=arcsin((D33/2)/R31) (4)
【0053】
特定の例示的な一実施形態によれば、角度A21は、初期推定値0に設定される。次いで、角度A20 441の値が概して収束するまで、式2、3、および4を反復的に解くことができる(制約abs(A20)>A20_TOLを条件として)。まとめて書くと、方程式系は、以下の擬似コードステートメントによって表すことができる。
A20=A23−A22−A21
abs(A20)>A20_TOLの場合
R31=W34/sin(A20)
A21=arcsin((D33/2)/R31)
【0054】
ステアリングポイント角度A20 441が概して収束したとき、第1の前脚ステアリング角度A24 432を別の式から決定することができる。この式は、ステアリングポイント−主脚距離W34 414と、前脚−主脚ステアリング距離W35 412と、方程式系からのステアリングポイント角度A20 441とから、第1の前脚ステアリング角度A24 432を決定することができる。
A24=arctan((W35/W34)*tan(A20)) (5)
【0055】
特定の例示的な一実施形態によれば、航空機400のステアリングポイントP41 420が終点422に近い位置に到達したとき、前述のプロセスを繰り返して、ステアリングポイントP41 420を次の終点に進めることができる。特定の例示的な一実施形態によれば、次の各終点の場所、したがってステアリングポイントP41 420と次の終点との間の直線距離D33は、全ての脚404および406を誘導路の表面上に維持する前脚オーバーステアリング経路を呈するのに十分なように小さく選択することができる。別の特定の例示的な実施形態によれば、直線距離D33 426は、前脚ステアリング角度A24 432についての計算を実施する際の処理負荷が妥当となるように十分に大きく選択することができる。
【0056】
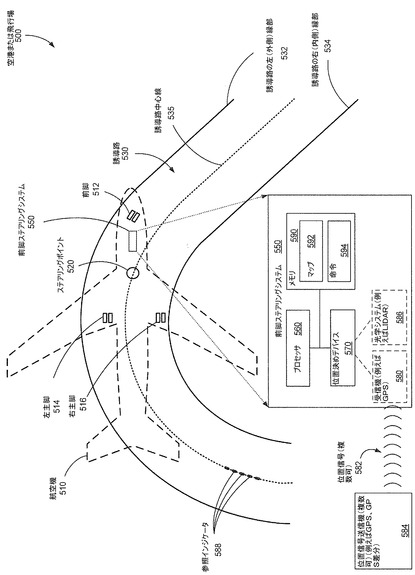
図5は、特定の例示的な一実施形態による、航空機510が前脚ステアリングシステム550を使用する、空港または飛行場500のブロック図である。前脚ステアリングシステム550は、航空機510に搭載することができる。特定の例示的な一実施形態によれば、前脚ステアリングシステム550は、プロセッサ560、位置決めデバイス570、およびメモリ590を備えることができる。プロセッサ560、位置決めデバイス570、およびメモリ590は、相互に通信するように動作可能に結合される。
【0057】
位置決めデバイス570は、誘導路に対して相対的な航空機の位置を決定する。特定の例示的な一実施形態によれば、位置決めデバイス570は、1つまたは複数の位置信号送信機584から1つまたは複数の位置信号を受信するように構成された受信機580を含むことができる。特定の例示的な一実施形態によれば、位置信号送信機584は、全地球測位システム(GPS)衛星を含むことができる。別の特定の例示的な実施形態によれば、位置信号送信機584はまた、GPS衛星およびGPS差分信号ソース(図1には示さず)を含むことができ、GPS差分信号ソースは、空港500に配備され、GPS衛星から受信されるGPS信号に対するオフセットを提供して、空港500で受信されるGPS信号中の偏差を訂正し、GPSシステムから得られる情報の精度を改善する。別の特定の例示的な実施形態によれば、1つまたは複数の位置信号送信機584は、1つまたは複数の位置信号582を提供する他のシステムを含むことができる。
【0058】
別の特定の例示的な実施形態によれば、位置決めデバイス570は、受信機580を備えることに代えてまたは追加で、光学システム586を備えることができる。特定の例示的な一実施形態では、光学システム586は、誘導路530に対して相対的な航空機510の位置を正確に識別するのを補助するために、レーザ撮像検出および測距(LIDAR、Laser Imaging Detection and Ranging)システムまたは別のシステムを含むことができる。LIDARシステムや類似のシステムなどの光学システム586は、参照インジケータ588に対して相対的な航空機の位置を正確に決定するように構成することができる。参照インジケータ588は、誘導路中心線535に沿ったマーキング、または、誘導路530および飛行場500もしくはその周辺に位置決めされた他の参照ポイントを含むことができる。マーキングは、可視光スペクトルまたは他のスペクトルにおいて検出可能とすることができる。参照インジケータ588は、視覚的に検出可能、または非視覚的に検出可能とすることができる。参照インジケータ588は、航空機に正確な位置決めデータを提供するのを補助するための参照ポイントを形成する。
【0059】
特定の例示的な一実施形態によれば、メモリ590は、空港500のマップ592を含むことができ、マップ592は例えば、空港500における1つまたは複数の誘導路530のレイアウトを提示する。マップ592を位置決めデバイス570からの位置データと比較して、前脚ステアリングシステム550が誘導路530に対する航空機510の位置を決定するのを可能にすることができる。メモリ590はまた、航空機をタキシングするための操舵方法の一実施形態を可能にする計算を実施するためにプロセッサ560によって実行可能な命令594を含むことができる。例えば、命令594は、図4に関して述べたような前脚ステアリング角度を決定するための命令を含むことができる。
【0060】
航空機510が誘導路530に沿って移動するのに伴って、前脚ステアリングシステム550は、1つもしくは複数の位置信号582を受信するか、または、位置決めデバイス570によって使用される他の位置決めデータを処理する。特定の例示的な一実施形態によれば、前脚ステアリングシステム550は、位置決めデバイス570によって決定された位置決め情報をマップ592と比較して、誘導路530に対して相対的な航空機510の位置を決定することができる。特定の一実施形態では、前脚ステアリングシステム550は、ステアリングポイント520の位置を誘導路中心線535と比較して、航空機510を操舵するために前脚512を方向付けることができる。別の特定の実施形態では、前脚ステアリングシステム550は、左主脚514を誘導路530の左縁部532(図5に示すような右側ターンにおける誘導路の外側縁部)内に維持し、右主脚516を誘導路530の右(内側)縁部534内に維持するように、前脚ステアリング角度を計算する。例えば、さらに別の特定の実施形態では、前脚ステアリングシステム550は、図4に関して述べた式を使用して、前脚ステアリング角度を決定することができる。
【0061】
特定の例示的な一実施形態によれば、前脚ステアリングシステム550によって計算された前脚ステアリング角度を前脚ステアリング装置に直接提供して、航空機510を自動的に操舵することができる。別法として、さらに別の特定の実施形態では、前脚ステアリングシステム550によって計算された前脚ステアリング角度を航空機510のオペレータ(図5には示さず)に提供して、オペレータが航空機510の前脚512をオーバーステアして左主脚514および右主脚516を誘導路530の縁部532および534内に維持するのを可能にすることができる。
【0062】
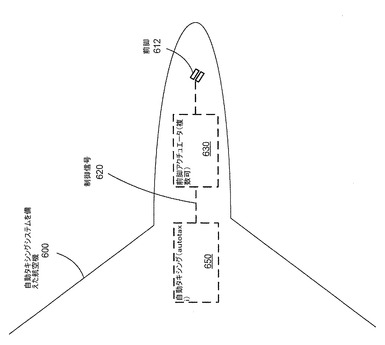
図6は、自動タキシング(autotaxi)システム650を搭載した航空機600のブロック図である。航空機600に搭載された自動タキシングシステム650は、図5の前脚ステアリングシステム550の特定の一実施形態である。自動タキシングシステム650は、制御信号620を生成する。制御信号620を、航空機600の前脚612を駆動する前脚アクチュエータ630に通信することができる。航空機600は、全ての脚を誘導路の表面上に維持しながら、自動的にタキシングすることができる。
【0063】
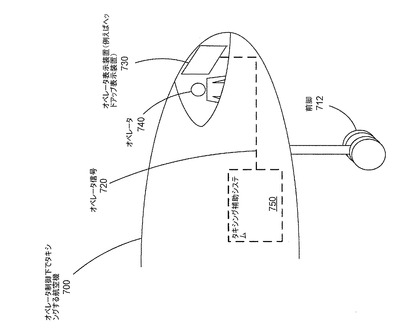
図7は、タキシング補助システム750を搭載した航空機700のブロック図である。航空機700に関するタキシング補助システム750は、図5の前脚ステアリングシステム550の別の特定の実施形態として装備される。タキシング補助システム750は、オペレータ信号720を生成する。特定の例示的な一実施形態によれば、オペレータ信号720は、オペレータ740によって使用されるヘッドアップ表示装置などのオペレータ表示装置730に通信することができる。他の特定の実施形態では、オペレータ信号720は、他のデバイス(図7には示さず)を介して、他の視覚的合図または可聴もしくは触覚合図としてオペレータ740に提供することができる。したがって、オペレータ740は、オペレータ表示装置730上に示されるオペレータ信号720に応答して前脚712をオーバーステアして、全ての脚を誘導路の表面上に維持できるものとすることができる。オペレータ信号720がオペレータ表示装置730を介して適切なステアリング角度をオペレータ740に提供するので、オペレータ740は、全ての脚を誘導路の表面上に保持しようとしてオーバーステアリング角度を推定する必要はないものとすることができる。そうではなく、タキシング補助システム750からオペレータ表示装置730によって提供される合図に従うことにより、オペレータ740は、間違った操舵決定から生じるかもしれない当て推量や潜在的な事故を伴わずに、航空機700を正しく操舵することができる。
【0064】
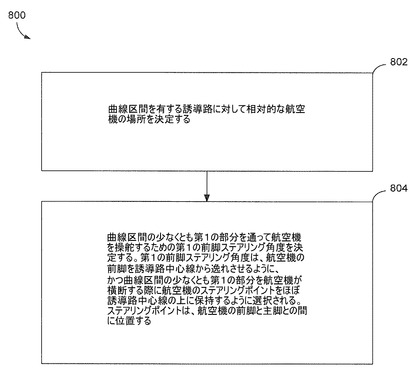
図8は、航空機をタキシングするための操舵方法800の特定の一実施形態のフローチャートである。特定の例示的な一実施形態では、方法800は、図5の前脚ステアリングシステム550など、航空機に搭載された前脚ステアリングシステムによって実施することができる。別法として、別の特定の例示的な実施形態によれば、航空機の機外で方法800を使用して適切な前脚オーバーステアリングを決定し、航空機に通信することができる。
【0065】
特定の例示的な一実施形態によれば、802で、曲線区間を有する誘導路に対して相対的な航空機の場所が決定される。例えば、図5に関して述べたように、航空機の場所は、1つまたは複数の位置信号送信機584から1つまたは複数の位置信号582を受信し、1つまたは複数の位置信号582から決定される位置情報をメモリ590に記憶されたマップ592と比較することによって、決定することができる。804で、曲線区間の第1の部分を通って航空機を操舵するための第1の前脚ステアリング角度が決定される。第1の前脚ステアリング角度は、航空機の前脚を誘導路中心線から逸れさせるように選択される。第1の前脚ステアリング角度は、曲線区間の少なくとも第1の部分を航空機が横断する際に航空機のステアリングポイントをほぼ誘導路中心線の上に保持するように選択される。ステアリングポイントは、図2〜4に関して先に説明したように、航空機の前脚と主脚との間に位置することができる。
【0066】
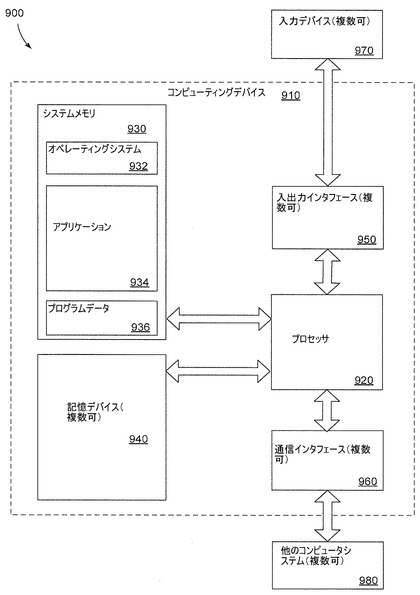
図9は、航空機をタキシングする方法の一実施形態のコンピュータ実装方法を実施するかまたはコンピュータ実行可能命令を処理するように動作可能な汎用コンピュータシステムのブロック図である。特定の例示的な一実施形態によれば、コンピュータシステム900は、図5〜7に関して述べたように、航空機などの車両に搭載されるように位置決めすることができる。例示的な一実施形態では、コンピューティングデバイス910が、少なくとも1つのプロセッサ920を備えることができる。特定の例示的な一実施形態によれば、図6に関して述べたように、プロセッサ920は、前脚を自動的にオーバーステアする方法を実施するための命令を実行するように構成することができる。別の特定の例示的な実施形態によれば、図7に関して述べたように、プロセッサ920は、航空機を誘導路の表面上に維持するための前脚オーバーステアリング合図を提供することができる。プロセッサ920は、システムメモリ930、1つまたは複数の記憶デバイス940、および、入出力インタフェース950を介した1つまたは複数の入力デバイス970と通信することができる。特定の例示的な一実施形態によれば、1つまたは複数の入力デバイス970は、図5の受信機580や光学システム586など、1つまたは複数の位置決めデバイス570を含むことができる。プロセッサ920はまた、1つまたは複数の受信機または他の通信インタフェース960を介して、位置信号582(図5)を受信するか、そうでない場合は1つまたは複数の他のコンピュータシステム980または他のデバイスと通信することができる。
【0067】
システムメモリ930は、ランダムアクセスメモリ(RAM)デバイスなどの揮発性メモリデバイスと、読取専用メモリ(ROM)、プログラム可能な読取専用メモリ、およびフラッシュメモリなどの不揮発性メモリデバイスとを含めた、非一時的なメモリデバイスを含むことができる。特定の例示的な一実施形態によれば、システムメモリ930はオペレーティングシステム932を含むことができ、オペレーティングシステム932は、コンピューティングデバイス910をブートするためのBIOS(basic input/output system)、ならびに、コンピューティングデバイス910がユーザ、他のプログラム、および他のデバイスと対話できるようにするための完全なオペレーティングシステムを含むことができる。別の特定の例示的な実施形態によれば、システムメモリ930はまた、前述のように、航空機をオーバーステアするようにコンピューティングデバイス910を構成するための命令や、誘導路に対して相対的な航空機の位置を決定するのを補助するためのマップなど、1つまたは複数のアプリケーションプログラム934を含むことができる。
【0068】
プロセッサ920はまた、1つまたは複数の記憶デバイス940と通信することができる。特定の例示的な一実施形態によれば、記憶デバイス940は、磁気ディスク、光ディスク、またはフラッシュメモリデバイスなど、不揮発性記憶デバイスを含むことができる。別の特定の例示的な実施形態によれば、記憶デバイス940は、オペレーティングシステム932、アプリケーション934、プログラムデータ936、またはこれらの任意の組合せを記憶するように構成することができる。
【0069】
本明細書に述べた実施形態の例示は、様々な実施形態の構造の一般的な理解を提供することを意図したものである。これらの例示は、本明細書に述べた構造または方法を利用する装置およびシステムの全ての要素および特徴の完全な記述としての働きをするものとはしない。本開示を検討すれば、多くの他の実施形態が当業者には明らかであろう。本開示から他の実施形態を利用および導出することができ、したがって、本開示の範囲を逸脱することなく構造的および論理的な置換および変更を行うことができる。例えば、図示した順序とは異なる順序で方法ステップを実施してもよく、あるいは1つまたは複数の方法ステップを省略してもよい。したがって、本開示および図は、限定的ではなく例示的なものと見なすべきである。
【0070】
さらに、本明細書では特定の実施形態について例示および記述したが、示した特定の実施形態を、同じまたは類似の結果を達成するように設計された任意の後続の構成で置換できることを理解されたい。本開示は、様々な実施形態の、いずれかおよび全ての後続の適応または変形をカバーするものとする。本記述を検討すれば、以上の実施形態および本明細書で特に述べられていない他の実施形態の組合せも、当業者には明らかになるであろう。
【0071】
「要約書」は、請求項の範囲または意味を解釈または限定するために使用されることはないものと理解して提出される。加えて、前述の「発明を実施するための形態」では、開示を合理化する目的で、様々な特徴を共にグループ化する場合、または単一の実施形態において述べている場合がある。本開示は、特許請求される実施形態が、各請求項で明示的に列挙されるよりも多くの特徴を必要とするという意図を反映するものと解釈すべきではない。そうではなく、以下の特許請求の範囲が反映するように、特許請求される主題は、開示されるいずれかの実施形態の全ての特徴よりも少ない特徴を対象とすることができる。
【符号の説明】
【0072】
200 誘導路ターン
210 第1の航空機
211 胴体
212 前脚
213 推進システム
214 左主脚
216 右主脚
220 ステアリングポイント
230 誘導路
232 誘導路の左(外側)縁部
234 誘導路の右(内側)縁部
235 誘導路中心線
240 前脚オーバーステアリング経路
250 航空機中心線
250 誘導路の直線路
260 第2の航空機
261 胴体
262 前脚
263 推進システム
264 左主脚
266 右主脚
270 ステアリングポイント
300 誘導路ターン
302 逸脱ポイント
304 収束ポイント
310 サンプル区間
312 前脚
320 サンプル区間の拡大
335 誘導路中心線
340 前脚オーバーステアリング経路
351 第1のポイントにおける航空機中心線の配向
352 第2のポイントにおける航空機中心線の配向
353 第3のポイントにおける航空機中心線の配向
371 第1のポイント
372 第2のポイント
373 第3のポイント
374 第4のポイント
381 第1のセグメント
382 第2のセグメント
383 第3のセグメント
391 第1の前脚ステアリング角度
392 第2の前脚ステアリング角度
393 第3の前脚ステアリング角度
400 航空機
402 航空機の中心線
404 前脚
406 主脚
408 主脚軸
410 参照配向軸
412 前脚−主脚距離W35
414 ステアリングポイント−主脚距離W34
416 中心線から第1の位置の曲率半径の原点までの距離R30
418 ステアリングポイントP41 420と、ターンの第1の部分435の湾曲439の半径の原点427との間の半径R31
419 前脚半径R32
420 ステアリングポイントP41
422 誘導路中心線上の終点
426 ステアリングポイントP41 420とターンの第1の部分435の終点422との間の直線距離D33
427 ターンの第1の部分435の湾曲439の半径の原点P40
430 機首方位角度A22
432 第1の前脚ステアリング角度A24
434 ステアリングポイント機首方位A23
435 ターンの第1の部分
437 ターンの第1の部分435の湾曲439に対する接線
439 ターンの第1の部分の湾曲
441 ステアリングポイントP41 420における、航空機400の中心線402とターンの第1の部分435の湾曲439に対する接線437との間の角度(ステアリングポイント角度)A20
470 ステアリングポイントP41 420における、接線437と、ステアリングポイントP41 420と終点422との間の直線距離D33 426を定義する線分との間の角度A21
471 終点422へのステアリングポイントP41 420の角運動を表す角度
500 空港または飛行場
510 航空機
512 前脚
514 左主脚
516 右主脚
520 ステアリングポイント
530 誘導路
532 誘導路の左(外側)縁部
534 誘導路の右(内側)縁部
535 誘導路中心線
550 前脚ステアリングシステム
560 プロセッサ
570 位置決めデバイス
580 受信機
582 位置信号
584 位置信号送信機
586 光学システム
588 参照インジケータ
590 メモリ
592 マップ
594 命令
600 航空機
612 前脚
620 制御信号
630 前脚アクチュエータ
650 自動タキシング(autotaxi)システム
700 航空機
712 前脚
720 オペレータ信号
730 オペレータ表示装置
740 オペレータ
750 タキシング補助システム
900 コンピュータシステム
910 コンピューティングデバイス
920 プロセッサ
930 システムメモリ
932 オペレーティングシステム
934 アプリケーションプログラム
936 プログラムデータ
940 記憶デバイス
950 入出力インタフェース
960 通信インタフェース
970 入力デバイス
980 他のコンピュータシステム
【技術分野】
【0001】
本開示は一般に、航空機のタキシングに関する。
【背景技術】
【0002】
大型の商用航空機は、長い軸距を有する場合がある。軸距は、航空機の中心線に沿った、航空機の前脚と主脚との間の距離である。航空機の軸距が長いと、ターンを実行しながら誘導路の表面上に主着陸脚を保持するのが困難になる場合がある。
【0003】
図1は、誘導路ターン100を航行しようとする航空機110を示す従来技術の図であり、航空機110の前脚112が誘導路中心線135を辿る。航空機110の脚112、114、および116が、誘導路130の表面上(すなわち誘導路130の左(外側)縁部132と誘導路130の右(内側)縁部134との間)に留まることが望ましいであろう。しかし、前脚112が誘導路中心線135を辿るとき、右主脚116が誘導路130の右(内側)縁部134を越えることがある。そのため、右主脚116は誘導路130の表面を離れることがある。図1には、誘導路130が、オプションのフィレット136によって誘導路130の右(内側)縁部134に隣接して拡張されているのを示す。オプションのフィレット136は、十分に広ければ、追加の舗装表面を形成して右主脚116を支持する。オプションのフィレット136がなければ、右主脚116は誘導路130の表面を離れることがある。
【0004】
前脚112または主脚114および116が誘導路の表面を離れることは、重大な問題を生む場合がある。例えば、脚112、114、および116のいずれかが誘導路130の表面を離れると、航空機110が押し動かされて、乗客に怪我を負わせるかまたは航空機110およびその積み荷に損傷を与えることがある。さらに、誘導路130の路肩が柔らかい場合、路肩に乗り上げた脚112、114、および116のいずれかが路肩に沈み込み、航空機が立ち往生することがある。これらの懸念により、いくつかの誘導路の表面は、ターンにおいて拡張されて(フィレット136などのフィレットを使用して)、全ての脚を誘導路上に維持しようとする。
【0005】
前脚112ならびに主脚114および116を誘導路130上に保持するために、多くのオペレータは、前脚112を「オーバーステア」する。オーバーステアリングは、前脚112を誘導路中心線135よりも向こうに操舵して、ターン内側の主脚(例えば、図1に示すような右側ターンの場合の右主脚116)が誘導路130の表面を離れないようにしようとすることを伴う。前脚112が誘導路中心線135を越えて遠くに操舵され過ぎると、前脚112が誘導路130の表面から離れていく場合がある。他方、前脚112が誘導路中心線135を越えて十分遠くに操舵されないと、右主脚116(図1に示すような右側ターンの場合。または、左側ターンの場合は左主脚114)が誘導路130の表面から離れていく場合がある。
【発明の概要】
【発明が解決しようとする課題】
【0006】
ターン中に前脚および主脚が誘導路の表面から離れていかないように航空機を誘導路上で操舵するのを補助するための方法、非一時的なコンピュータ可読記憶媒体、および航空機を開示する。航空機を誘導路の表面上に維持するために、航空機の中心線に沿ってステアリングポイントが選択される。ステアリングポイントは、前脚と、主脚の軸が航空機の中心線と交差するポイントとの間とすることができる。航空機を誘導路の表面上に維持するために、前脚が「オーバーステア」されて(すなわち誘導路中心線の外側に操舵されて)、ステアリングポイントが誘導路中心線を辿るようにする。ステアリングポイントが誘導路中心線を辿ることにより、航空機は、どの脚も誘導路の表面を離れることなく、ターンを完了することができる。誘導路の拡張は必要とされない。
【0007】
ターンはセグメントに分割することができる。各セグメントにつき、ステアリングポイントを誘導路中心線の上に維持するための前脚ステアリング角度を決定することができる。決定された前脚ステアリング角度を使用して、前脚を自動的に方向付けることができる。別法として、前脚ステアリング角度をオペレータに提示して、オペレータが前脚を正しく操舵するのを補助することができる。
【課題を解決するための手段】
【0008】
特定の一実施形態では、方法が、曲線区間を有する誘導路に対して相対的な航空機の場所を決定する。方法は、曲線区間の少なくとも第1の部分を通って航空機を操舵するための第1の前脚ステアリング角度を決定する。第1の前脚ステアリング角度は、航空機の前脚を誘導路中心線から逸れさせるように選択される。第1の前脚ステアリング角度は、曲線区間の少なくとも第1の部分を航空機が横断する際に航空機のステアリングポイントをほぼ誘導路中心線の上に保持するように選択される。ステアリングポイントは、航空機の前脚と主脚との間に位置する。
【0009】
別の特定の実施形態では、非一時的なコンピュータ可読記憶媒体が、プロセッサによって実行可能な命令を記憶する。曲線区間を有する誘導路に対して相対的な航空機の場所に基づいて、プロセッサによって実行可能な命令は、曲線区間の少なくとも第1の部分を通って航空機を操舵するための第1の前脚ステアリング角度を自動的に決定する。第1の前脚ステアリング角度は、航空機の前脚を誘導路中心線から逸れさせるように選択される。第1の前脚ステアリング角度は、曲線区間の少なくとも第1の部分を航空機が横断する際に航空機のステアリングポイントをほぼ誘導路中心線の上に保持するように選択される。プロセッサによって実行可能な命令はまた、航空機が第1の前脚ステアリング角度に従って操舵されるのを可能にするように動作可能な信号を生成する。
【0010】
別の特定の実施形態では、航空機が、中心線を有する胴体を備える。前脚が胴体から延びる。前脚は、曲線区間を含む誘導路の一部に沿って航空機を方向付けるように操舵される。主脚もまた胴体から延びる。推進システムが、誘導路に沿ってタキシングするために航空機に動力供給するように動作する。前脚ステアリングシステムが、プロセッサと、プロセッサに動作可能に結合され位置信号を受信するように構成された受信機と、プロセッサによって実行可能な命令を含むメモリとを備える。メモリ中の命令は、位置信号に基づいて、誘導路に対して相対的な航空機の場所を決定する。メモリ中の命令はまた、曲線区間の少なくとも第1の部分を通って航空機を操舵するための第1の前脚ステアリング角度を決定する。第1の前脚ステアリング角度は、航空機の前脚を誘導路中心線から逸れさせるように選択される。第1の前脚ステアリング角度は、曲線区間の少なくとも第1の部分を航空機が横断する際に航空機のステアリングポイントをほぼ誘導路中心線の上に保持するように選択される。
【0011】
述べる特徴、機能、および利点は、様々な実施形態で独立して達成することができ、あるいはさらに他の実施形態で組み合わせてもよく、これに関する更なる詳細は、以下の記述および図面を参照しながら開示する。
【0012】
本発明は、以下にも関係する。
【0013】
1.曲線区間を有する誘導路に対して相対的な航空機の場所を決定するステップと、
曲線区間の少なくとも第1の部分を通って航空機を操舵するための第1の前脚ステアリング角度を決定するステップとを含む方法であって、第1の前脚ステアリング角度が、航空機の前脚を誘導路中心線から逸れさせるように、かつ曲線区間の少なくとも第1の部分を航空機が横断する際に航空機のステアリングポイントをほぼ誘導路中心線の上に保持するように選択され、ステアリングポイントが航空機の前脚と主脚との間に位置する、方法。
【0014】
2.ステアリングポイントが航空機の中心線上にある、項目1に記載の方法。
【0015】
3.ステアリングポイントが、前脚と主脚との間の距離、航空機の中心線と主脚との間の距離、またはこれらのいずれかの組合せに基づいて選択される、項目2に記載の方法。
【0016】
4.ステアリング角度が、
第1の部分の曲率半径と、
ステアリングポイントから第1の部分の終点までの直線距離と、
航空機の中心線に沿った、主脚からステアリングポイントまでの距離と、
航空機の中心線に沿った、主脚から前脚までの距離と、
主脚軸に沿った、第1の部分の曲率半径の原点と航空機の中心線との間の距離とに少なくとも部分的に基づいて決定される、項目3に記載の方法。
【0017】
5.第1の部分の終点を自動的に選択するステップであって、終点が誘導路の中心線上にあるステップと、
第1の部分の曲率半径、および曲率半径の原点の位置を自動的に決定するステップとをさらに含む、項目4に記載の方法。
【0018】
6.曲率半径に基づくステアリングポイントにおける第1の部分の曲線に接する線とステアリングポイントから終点までの直線との間の第1の角度と、終点までの直線距離と、航空機の中心線に沿った主脚からステアリングポイントまでの距離とを推定するステップをさらに含む、項目5に記載の方法。
【0019】
7.推定された第1の角度に基づいて、航空機の中心線と、第1の部分の曲線に接する線との間の第2の角度を決定するステップをさらに含む、項目6に記載の方法。
【0020】
8.第2の角度と、航空機の中心線に沿った主脚からステアリングポイントまでの距離と、主脚の軸に垂直なポイントにおける航空機の中心線から第1の部分の曲率半径の原点までの距離とに基づいてステアリング角度を決定するステップをさらに含む、項目7に記載の方法。
【0021】
9.ステアリングポイントが第1の部分の終点に近いと決定することに応答して曲線の第2の部分を選択するステップをさらに含む、項目1に記載の方法。
【0022】
10.第2の部分を通してステアリングポイントを航空機の中心線の上に維持するための第2のステアリング角度を決定するステップをさらに含む、項目9に記載の方法。
【0023】
11.誘導路に対して相対的な航空機の場所を決定するステップが、
航空機の位置を示す信号を受信して航空機の位置を誘導路の電子マップと比較するステップと、
光学システムとレーザ撮像検出および測距(LIDAR)システムとの少なくとも一方を使用して複数の参照インジケータに対して相対的な航空機の場所を決定するステップとのうちの1つまたは複数を含む、項目1に記載の方法。
【0024】
12.前脚をステアリング角度で自動的に位置決めするステップをさらに含む、項目1に記載の方法。
【0025】
13.航空機のオペレータが前脚をステアリング角度に調整および位置決めできるようにするための情報を航空機のオペレータに提供するオペレータ信号を生成するステップをさらに含む、項目1に記載の方法。
【0026】
14.航空機のヘッドアップ表示装置を介してオペレータ信号を航空機のオペレータに対して表示するステップをさらに含む、項目13に記載の方法。
【0027】
15.ステアリング角度が、曲線区間を航空機が横断する間に主脚を誘導路の主要タキシング表面内に留まらせるように選択される、項目1に記載の方法。
【0028】
16.航空機がステアリング角度に従って曲線を通って操舵されるとき、主脚のどの部分も誘導路のフィレットに入らない、項目1に記載の方法。
【0029】
17.プロセッサによって実行可能な命令を記憶した非一時的なコンピュータ可読記憶媒体であって、命令が、
曲線区間を有する誘導路に対して相対的な航空機の場所に基づいて、曲線区間の少なくとも第1の部分を通って航空機を操舵するための第1の前脚ステアリング角度を自動的に決定するための命令であって、第1の前脚ステアリング角度が、航空機の前脚を誘導路中心線から逸れさせるように、かつ曲線区間の少なくとも第1の部分を航空機が横断する際に航空機のステアリングポイントをほぼ誘導路中心線の上に保持するように選択される命令と、
航空機が第1の前脚ステアリング角度に従って操舵されるように動作可能な信号を生成するための命令とである、非一時的なコンピュータ可読記憶媒体。
【0030】
18.曲線区間を有する誘導路に対して相対的な航空機の場所が、
航空機の位置を示す信号を受信すること、および
航空機の位置を誘導路の電子マップと比較することによって決定される、項目17に記載の非一時的なコンピュータ可読記憶媒体。
【0031】
19.信号が、
航空機を第1の前脚ステアリング角度に従って操舵するように構成された自動タキシングシステムに提示される制御信号と、
第1の前脚ステアリング角度を示す表示装置に提示されるオペレータ信号とのうちの一方を含む、項目17に記載の非一時的なコンピュータ可読記憶媒体。
【0032】
20.中心線を有する胴体と、
胴体から延びる前脚であって、曲線区間を含む誘導路の一部に沿って航空機を方向付けるように操舵可能な前脚と、
胴体から延びる主脚と、
誘導路に沿ってタキシングするために航空機に動力供給するように動作可能な推進システムと、
前脚ステアリングシステムとを備える航空機であって、前脚ステアリングシステムが、
プロセッサと、
プロセッサに動作可能に結合され位置信号を受信するように構成された受信機と、
プロセッサによって実行可能な命令を含むメモリとを備え、命令が、
位置信号に基づいて誘導路に対して相対的な航空機の場所を決定するための命令と、
曲線区間の少なくとも第1の部分を通って航空機を操舵するための第1の前脚ステアリング角度を決定するための命令とであり、第1の前脚ステアリング角度が、航空機の前脚を誘導路中心線から逸れさせるように、かつ曲線区間の少なくとも第1の部分を航空機が横断する際に航空機のステアリングポイントをほぼ誘導路中心線の上に保持するように選択される、航空機。
【図面の簡単な説明】
【0033】
【図1】航空機の前脚が誘導路中心線を辿る、誘導路ターンを横断する航空機を示す図である(従来技術)。
【図2】航空機をタキシングするための操舵方法の一実施形態による、ステアリングポイントが誘導路中心線を辿る、図1の誘導路ターンを横断する航空機を示す図である。
【図3】航空機をタキシングするための操舵方法の一実施形態による、誘導路中心線が複数のセグメントと見なされて前脚ステアリング角度が決定される、誘導路ターンの図である。
【図4】航空機をタキシングするための操舵方法の一実施形態による、ターンの第1の部分を通って操舵される航空機の図であって、誘導路ターンのポイントにおける前脚ステアリング角度を決定するのに使用される距離および角度を示すための図である。
【図5】航空機をタキシングするための操舵方法の一実施形態による、航空機が前脚ステアリングシステムを使用する、空港または飛行場のブロック図である。
【図6】特定の実施形態による前脚ステアリングシステムのブロック図である。
【図7】特定の実施形態による前脚ステアリングシステムのブロック図である。
【図8】航空機をタキシングするための操舵方法の一実施形態のフローチャートである。
【図9】航空機をタキシングするための操舵方法の一実施形態のコンピュータ実装方法を実施するかまたはコンピュータ実行可能命令を処理するように動作可能な汎用コンピュータシステムのブロック図である。
【発明を実施するための形態】
【0034】
本明細書に開示する実施形態は、ターン中に前脚および主脚を誘導路の表面上に維持するように航空機を誘導路上で操舵するのを補助するための方法、非一時的なコンピュータ可読記憶媒体、および航空機を含む。ステアリングポイントが、航空機の中心線に沿って前脚と主脚との間で識別される。ステアリングポイントを使用して、前脚についてのステアリング角度が決定される。前脚が誘導路中心線を辿るのではなく、ステアリングポイントが誘導路中心線を辿るように前脚がオーバーステアされる。ステアリングポイントがほぼ誘導路中心線を辿るようにすることで、航空機は、どの脚も誘導路の表面を離れることなく、ターンを実施することができる。特定の一実施形態では、ターンをセグメントに分割することができる。全ての脚を誘導路の表面上に維持するために、前脚ステアリング角度を各セグメントにつき決定することができる。決定された前脚ステアリング角度を使用して、前脚を自動的に方向付けることができる。別法として、前脚ステアリング角度をオペレータに提示して、オペレータが航空機を正しくオーバーステアするのを補助することができる。
【0035】
図2は、誘導路ターン200を横断する第1の航空機210および第2の航空機260を示す図である。誘導路ターン200は、図1の誘導路ターン100に類似する。しかし、図1の例とは異なり、第1の航空機210および第2の航空機260は、航空機をタキシングするための操舵方法の一実施形態により、それぞれステアリングポイント220および270を誘導路中心線235の上に維持することによって誘導路ターン200を航行する。対照的に、図1では、前脚112が誘導路中心線135を辿り、これにより主脚114と116の一方が誘導路130の表面を離れることがある。
【0036】
第1の航空機210は、前脚212と左主脚214と右主脚216とを支持する胴体211を備える。胴体211はまた、1つまたは複数のジェットエンジンを含むことのできる推進システム213を支持する。図2に示す実施形態では、第1の航空機210の前脚212は、誘導路中心線235から外れるように操舵される。その代わり、前脚212は、前脚オーバーステアリング経路240を辿る。ステアリングポイント220は、前脚212と主脚214および216との間のポイントで選択することができる。ステアリングポイント220は、後でさらに述べるように、全ての脚212、214、および216を誘導路230の表面上に保持するように誘導路中心線235に沿って移動するための中間場所を識別するように選択される。前脚オーバーステアリング経路240は、ステアリングポイント220を誘導路中心線235上のあるポイントから誘導路中心線235上の次のポイントに進めるように、第1の航空機210を誘導路ターン200の複数のセグメントを通って操舵する結果である。ステアリングポイント220を誘導路中心線235に沿って進めることにより、右主脚216は、図2の誘導路ターン200中で誘導路230の右(内側)縁部234内に留まる。脚212、214、および216を誘導路230の縁部232および234内に維持することで、第1の航空機210は、第1の航空機210のタキシングを容易にするための副次表面を形成するためにフィレット(図1のオプションのフィレット136など)を含める必要なしに、誘導路230の主要表面上でターンさせることができる。
【0037】
オーバーステアリングは、誘導路ターン200などの誘導路ターン上でのみ、行うに値することに留意されたい。誘導路が直線コースを呈するときは、前脚とステアリングポイントの両方が誘導路中心線に沿って進むことができる。図2を参照すると、第2の航空機260は、誘導路ターン200を過ぎた誘導路の直線路250を辿る。第2の航空機260は、前脚262と左主脚264と右主脚266とを支持する胴体261を備える。胴体261はまた、1つまたは複数のジェットエンジンを含むことのできる推進システム263を支持する。誘導路の直線路250上では、全ての脚262、264、および266が誘導路230の表面上に留まった状態で、第2の航空機260の前脚262とステアリングポイント270の両方が誘導路中心線235を辿る。
【0038】
図3は誘導路ターン300の図であり、この図では、誘導路中心線335が複数のセグメントと見なされて、航空機を前脚オーバーステアリング経路340に沿って方向付けるのに使用される前脚ステアリング角度391〜393が決定される。前脚オーバーステアリング経路340は、図2にも示したように、誘導路が直線コースをとるときは誘導路中心線335を辿る。しかし、誘導路ターン300の始まりでは、特定の例示的な一実施形態によれば、前脚オーバーステアリング経路340が誘導路中心線335から逸脱する逸脱ポイント302がある。逸脱ポイント302で、前脚312は、誘導路中心線335から逸れることができる。前脚312はオーバーステアされて、ステアリングポイント(第1のポイント371、第2のポイント372、および第3のポイント373として段階を追って誘導路中心線335に沿って周期的に示されている)が誘導路中心線335に沿って進められる。前脚オーバーステアリング経路340が誘導路中心線335から逸脱し続けるのに伴って、前脚312は前脚オーバーステアリング経路340を辿る。誘導路ターン300の終わりの後、前脚オーバーステアリング経路340は、収束ポイント304に到達するまで誘導路中心線335に向かって収束する。
【0039】
特定の例示的な一実施形態によれば、前脚312は、航空機のステアリングポイント(やはり第1のポイント371、第2のポイント372、および第3のポイント373として段階を追って誘導路中心線335に沿って周期的に示されている)を誘導路中心線335の上に維持するように操舵される。ステアリングポイントが誘導路中心線335を追跡するようにすることで、図2に示したように、全ての脚212、214、および216は、誘導路ターン200を航行するプロセス全体を通して誘導路230の表面上に留まることができる。特定の例示的な一実施形態によれば、前脚オーバーステアリング経路340は、誘導路中心線335を誘導路中心線335に沿ったポイント間の複数のセグメントと見なすことによって決定することができる。各ポイントで、ステアリングポイントを誘導路中心線335上のあるポイントから誘導路中心線335に沿った次のポイントに移動させることのできる前脚ステアリング角度が決定される。誘導路中心線335に沿ったステアリングポイントの位置を表す複数のポイント371〜374と、ポイント371〜374を結ぶセグメント381〜383とが、図3の誘導路ターン300のサンプル区間310の拡大320中に示されている。
【0040】
特定の例示的な一実施形態では、サンプル区間310の拡大320中に示す複数のセグメント381〜383は、誘導路中心線335に沿った複数のポイント371〜374の隣接する各ポイントを結ぶ。記述を容易にするために、図3では、航空機は、図1および2に示した航空機110および210と同じ方向にタキシングするように示す。第1のポイント371(例えばステアリングポイントの第1の位置を表す)は、第1のセグメント381によって第2のポイント372(例えばステアリングポイントの第2の位置を表す)に接合される。第2のポイント372は、第2のセグメント382によって第3のポイント373に接合される。第3のポイント373は、第3のセグメント383によって第4のポイント374に接合される。セグメント381〜383のうちの1つの始まりにおけるポイント371〜373のそれぞれで、前脚ステアリング角度391〜393が決定される。前脚ステアリング角度391〜393は、前脚312における、航空機中心線の現在の配向351〜353と前脚オーバーステアリング経路340との間の角度である。前脚ステアリング角度391〜393は、ステアリングポイントが誘導路中心線335に沿って次の各ポイント372〜374にそれぞれ進むように航空機を操舵するために選択される。
【0041】
例えば、特定の例示的な一実施形態によれば、第1のポイント371では、ステアリングポイントが第1のポイント371から第1のセグメント381に沿って第2のポイント372に進むように航空機を進めることのできる第1の前脚ステアリング角度391が、前脚について決定される。第2のポイント372では、ステアリングポイントが第2のポイント372から第2のセグメント382に沿って第3のポイント373に進むように航空機を進めることのできる第2の前脚ステアリング角度392が決定される。第3のポイント373では、ステアリングポイントが第3のポイント373から第3のセグメント383に沿って第4のポイント374に進むように航空機を進めることのできる第3の前脚ステアリング角度393が決定される。誘導路ターン300に沿った誘導路中心線335を、セグメント381〜383によって結ばれる複数のポイント371〜374に分割することにより、全ての脚を誘導路の表面上に維持しながら、誘導路ターン300を通って航空機を操舵することができる。
【0042】
図4は、誘導路(図4には示さず)の第1の部分を通って操舵される航空機400の図である。図3に関して説明したように、誘導路中心線335は、ステアリングポイントP41 420が通過するセグメントによって接合される複数のポイントと見なすことができる。誘導路中心線335に沿った各ポイントにつき、前脚ステアリング角度を決定することができる。図4には、航空機をターンの第1の部分435を通って操舵するための第1の前脚ステアリング角度A24 432を決定するのに使用できる距離および角度を示す。第1の前脚ステアリング角度A24 432を使用してターンの第1の部分435を完了することで、ステアリングポイントP41 420は、ターンの第1の部分435の湾曲439を通って誘導路中心線上の終点422に進む。終点422は、誘導路中心線上の第1のまたは前のポイントにおけるステアリングポイントP41 420からの直線距離D33 426である。誘導路中心線上の各ポイントからターンの次の部分の終点までの一連の前脚ステアリング角度を決定することにより、前脚404および主脚406は、誘導路の表面上に留まることができる。
【0043】
特定の例示的な一実施形態によれば、ステアリングポイントP41 420は、航空機400の中心線402に沿った選択されたポイントとすることができる。より具体的には、ステアリングポイントP41 420は、前脚404と主脚軸408との間の中心線402に沿ったポイントに位置することができる。ステアリングポイントP41 420の場所は、航空機400の設計を反映させるように、前脚404と主脚406との間の距離、航空機400の中心線402と主脚406との間の距離、またはこれらの組合せに基づいて選択することができる。前脚404と主脚軸408との間の中心線402に沿った距離は、前脚−主脚距離W35 412と呼ぶことができる。ステアリングポイントP41 420と主脚軸408との間の中心線402に沿った距離は、ステアリングポイント−主脚距離W34 414と呼ぶことができる。特定の一実施形態によれば、ステアリングポイント−主脚距離W34 414は、式(1)によりオーバーステアリングパーセンテージX50に従って選択することができる。
W34=W35*(1−X50/100) (1)
【0044】
特定の例示的な一実施形態によれば、オーバーステアリングパーセンテージX50は、ランダムに選択することができる。別の例示的な一実施形態によれば、オーバーステアリングパーセンテージX50は、特定の航空機の設計に基づいてステアリングポイントP41 420についての適切な場所を決定するために、反復的に選択することができる。
【0045】
特定の例示的な一実施形態によれば、ステアリングポイントP41 420についての場所に基づいて、幾何形状を使用して、ステアリングポイントP41 420を誘導路中心線上の連続した各終点422に進めるのに使用される第1の前脚ステアリング角度A24 432を決定することができる。特定の一実施形態によれば、第1の前脚ステアリング角度A24 432は、反復的に方程式系を解いた後で別の式を解くことによって決定される。方程式系は、角度A20 441が収束するまで解く。角度A20 441は、ステアリングポイントP41 420において、航空機400の中心線402とターンの第1の部分435の湾曲439に対する接線437との間で測定される。角度A20 441は、図3に関して述べたようにステアリングポイントP41 420が中心線402の配向から操舵される角度を説明するので、ステアリングポイント角度と見なすことができる。ステアリングポイント角度A20 441は、ステアリングポイントP41 420を誘導路中心線(図4には示さず)の上に維持するように選択される。式を使用して、角度A20 441を用いて第1の前脚ステアリング角度A24 432が決定される。
【0046】
特定の例示的な一実施形態によれば、方程式系は、3つの角度に基づく。第1の角度は、ステアリングポイントP41 420において、参照配向軸410と、ステアリングポイントP41 420とターンの第1の部分435の終点422との間の直線距離D33 426を定義する線分との間で測定されるステアリングポイント機首方位A23 434である。第2の角度は、ステアリングポイントP41 420において、参照配向軸410と航空機400の中心線402との間で測定される機首方位角度A22 430である。第3の角度A21 470は、ステアリングポイントP41 420において、接線437と、ステアリングポイントP41 420と終点422との間の直線距離D33 426を定義する線分との間で測定される。
【0047】
第3の角度A21 470は、ターンの第1の部分435の曲率半径の原点P40 427で測定される、終点422へのステアリングポイントP41 420の角運動を表す角度471の2分の1である。言い換えれば、曲率半径の原点427で測定される角度471は、第3の角度A21 470の2倍(すなわち2×A21 470)である。ステアリングポイントP41 420がターンの第1の部分435の湾曲439を通って移動する際、最初は、ステアリングポイントP41 420は、ステアリングポイントP41 420と終点422との間の直線距離D33 426から離れていく方向で角度A21 470で移動することに留意されたい。次いでステアリングポイントP41 420は、ステアリングポイントP41 420が終点422に近づくにつれて、直線距離D33 426に向かっていく方向で角度A21 470で移動する。
【0048】
方程式系の第1の式は、式(2)によって与えることができる。
A20=A23−A22−A21 (2)
【0049】
特定の一実施形態では、ステアリングポイント角度A20 441の計算は、ステアリングポイント角度A20 441が量A20_TOLよりも大きいことを条件とすることができる。量A20_TOLは、0でない、小さい自由裁量の量とすることができ、ゼロ除算状態を回避するためにA20 441に制限を設ける。例えば、ゼロ除算状態は、航空機が誘導路の直線区間上を移動しているときに生じることがある。この条件は、以下によって与えることができる。
abs(A20)>A20_TOL
【0050】
この条件が満たされるときは、方程式系中の残りの式が解かれる。そうでない場合は、前脚404とステアリングポイントP41 420の両方が誘導路中心線を辿ることができ、全ての脚404および406は、前脚オーバーステアリングなしに誘導路の表面上に留まることができる。
【0051】
特定の例示的な一実施形態によれば、方程式系の第2の式は、3つの量に基づくことができる。第1の量は、ステアリングポイントP41 420と、ターンの第1の部分435の湾曲439の半径の原点427との間の半径R31 418の長さである。第2の量は、航空機400の中心線402に沿った、ステアリングポイントP41 420から主脚軸408までの距離W34 414である。第3の量は、ステアリングポイント角度A20 441の正弦である。方程式系の第2の式は、式(3)によって与えることができる。
R31=W34/sin(A20) (3)
【0052】
特定の例示的な一実施形態によれば、方程式系の第3の式は、3つの追加の量に基づくことができる。第1の量は、接線437と、ステアリングポイントP41 420と終点422との間の直線距離D33 426を定義する線分との間の、ステアリングポイントP41 420で測定される角度A21 470である。第2の量は、ステアリングポイントP41 420と終点422との間の直線距離D33 426である。第3の量は、ステアリングポイントP41 420と、ターンの第1の部分435の湾曲439の半径の原点427との間の、半径R31 418の長さである。方程式系の第3の式は、式(4)によって与えることができる。
A21=arcsin((D33/2)/R31) (4)
【0053】
特定の例示的な一実施形態によれば、角度A21は、初期推定値0に設定される。次いで、角度A20 441の値が概して収束するまで、式2、3、および4を反復的に解くことができる(制約abs(A20)>A20_TOLを条件として)。まとめて書くと、方程式系は、以下の擬似コードステートメントによって表すことができる。
A20=A23−A22−A21
abs(A20)>A20_TOLの場合
R31=W34/sin(A20)
A21=arcsin((D33/2)/R31)
【0054】
ステアリングポイント角度A20 441が概して収束したとき、第1の前脚ステアリング角度A24 432を別の式から決定することができる。この式は、ステアリングポイント−主脚距離W34 414と、前脚−主脚ステアリング距離W35 412と、方程式系からのステアリングポイント角度A20 441とから、第1の前脚ステアリング角度A24 432を決定することができる。
A24=arctan((W35/W34)*tan(A20)) (5)
【0055】
特定の例示的な一実施形態によれば、航空機400のステアリングポイントP41 420が終点422に近い位置に到達したとき、前述のプロセスを繰り返して、ステアリングポイントP41 420を次の終点に進めることができる。特定の例示的な一実施形態によれば、次の各終点の場所、したがってステアリングポイントP41 420と次の終点との間の直線距離D33は、全ての脚404および406を誘導路の表面上に維持する前脚オーバーステアリング経路を呈するのに十分なように小さく選択することができる。別の特定の例示的な実施形態によれば、直線距離D33 426は、前脚ステアリング角度A24 432についての計算を実施する際の処理負荷が妥当となるように十分に大きく選択することができる。
【0056】
図5は、特定の例示的な一実施形態による、航空機510が前脚ステアリングシステム550を使用する、空港または飛行場500のブロック図である。前脚ステアリングシステム550は、航空機510に搭載することができる。特定の例示的な一実施形態によれば、前脚ステアリングシステム550は、プロセッサ560、位置決めデバイス570、およびメモリ590を備えることができる。プロセッサ560、位置決めデバイス570、およびメモリ590は、相互に通信するように動作可能に結合される。
【0057】
位置決めデバイス570は、誘導路に対して相対的な航空機の位置を決定する。特定の例示的な一実施形態によれば、位置決めデバイス570は、1つまたは複数の位置信号送信機584から1つまたは複数の位置信号を受信するように構成された受信機580を含むことができる。特定の例示的な一実施形態によれば、位置信号送信機584は、全地球測位システム(GPS)衛星を含むことができる。別の特定の例示的な実施形態によれば、位置信号送信機584はまた、GPS衛星およびGPS差分信号ソース(図1には示さず)を含むことができ、GPS差分信号ソースは、空港500に配備され、GPS衛星から受信されるGPS信号に対するオフセットを提供して、空港500で受信されるGPS信号中の偏差を訂正し、GPSシステムから得られる情報の精度を改善する。別の特定の例示的な実施形態によれば、1つまたは複数の位置信号送信機584は、1つまたは複数の位置信号582を提供する他のシステムを含むことができる。
【0058】
別の特定の例示的な実施形態によれば、位置決めデバイス570は、受信機580を備えることに代えてまたは追加で、光学システム586を備えることができる。特定の例示的な一実施形態では、光学システム586は、誘導路530に対して相対的な航空機510の位置を正確に識別するのを補助するために、レーザ撮像検出および測距(LIDAR、Laser Imaging Detection and Ranging)システムまたは別のシステムを含むことができる。LIDARシステムや類似のシステムなどの光学システム586は、参照インジケータ588に対して相対的な航空機の位置を正確に決定するように構成することができる。参照インジケータ588は、誘導路中心線535に沿ったマーキング、または、誘導路530および飛行場500もしくはその周辺に位置決めされた他の参照ポイントを含むことができる。マーキングは、可視光スペクトルまたは他のスペクトルにおいて検出可能とすることができる。参照インジケータ588は、視覚的に検出可能、または非視覚的に検出可能とすることができる。参照インジケータ588は、航空機に正確な位置決めデータを提供するのを補助するための参照ポイントを形成する。
【0059】
特定の例示的な一実施形態によれば、メモリ590は、空港500のマップ592を含むことができ、マップ592は例えば、空港500における1つまたは複数の誘導路530のレイアウトを提示する。マップ592を位置決めデバイス570からの位置データと比較して、前脚ステアリングシステム550が誘導路530に対する航空機510の位置を決定するのを可能にすることができる。メモリ590はまた、航空機をタキシングするための操舵方法の一実施形態を可能にする計算を実施するためにプロセッサ560によって実行可能な命令594を含むことができる。例えば、命令594は、図4に関して述べたような前脚ステアリング角度を決定するための命令を含むことができる。
【0060】
航空機510が誘導路530に沿って移動するのに伴って、前脚ステアリングシステム550は、1つもしくは複数の位置信号582を受信するか、または、位置決めデバイス570によって使用される他の位置決めデータを処理する。特定の例示的な一実施形態によれば、前脚ステアリングシステム550は、位置決めデバイス570によって決定された位置決め情報をマップ592と比較して、誘導路530に対して相対的な航空機510の位置を決定することができる。特定の一実施形態では、前脚ステアリングシステム550は、ステアリングポイント520の位置を誘導路中心線535と比較して、航空機510を操舵するために前脚512を方向付けることができる。別の特定の実施形態では、前脚ステアリングシステム550は、左主脚514を誘導路530の左縁部532(図5に示すような右側ターンにおける誘導路の外側縁部)内に維持し、右主脚516を誘導路530の右(内側)縁部534内に維持するように、前脚ステアリング角度を計算する。例えば、さらに別の特定の実施形態では、前脚ステアリングシステム550は、図4に関して述べた式を使用して、前脚ステアリング角度を決定することができる。
【0061】
特定の例示的な一実施形態によれば、前脚ステアリングシステム550によって計算された前脚ステアリング角度を前脚ステアリング装置に直接提供して、航空機510を自動的に操舵することができる。別法として、さらに別の特定の実施形態では、前脚ステアリングシステム550によって計算された前脚ステアリング角度を航空機510のオペレータ(図5には示さず)に提供して、オペレータが航空機510の前脚512をオーバーステアして左主脚514および右主脚516を誘導路530の縁部532および534内に維持するのを可能にすることができる。
【0062】
図6は、自動タキシング(autotaxi)システム650を搭載した航空機600のブロック図である。航空機600に搭載された自動タキシングシステム650は、図5の前脚ステアリングシステム550の特定の一実施形態である。自動タキシングシステム650は、制御信号620を生成する。制御信号620を、航空機600の前脚612を駆動する前脚アクチュエータ630に通信することができる。航空機600は、全ての脚を誘導路の表面上に維持しながら、自動的にタキシングすることができる。
【0063】
図7は、タキシング補助システム750を搭載した航空機700のブロック図である。航空機700に関するタキシング補助システム750は、図5の前脚ステアリングシステム550の別の特定の実施形態として装備される。タキシング補助システム750は、オペレータ信号720を生成する。特定の例示的な一実施形態によれば、オペレータ信号720は、オペレータ740によって使用されるヘッドアップ表示装置などのオペレータ表示装置730に通信することができる。他の特定の実施形態では、オペレータ信号720は、他のデバイス(図7には示さず)を介して、他の視覚的合図または可聴もしくは触覚合図としてオペレータ740に提供することができる。したがって、オペレータ740は、オペレータ表示装置730上に示されるオペレータ信号720に応答して前脚712をオーバーステアして、全ての脚を誘導路の表面上に維持できるものとすることができる。オペレータ信号720がオペレータ表示装置730を介して適切なステアリング角度をオペレータ740に提供するので、オペレータ740は、全ての脚を誘導路の表面上に保持しようとしてオーバーステアリング角度を推定する必要はないものとすることができる。そうではなく、タキシング補助システム750からオペレータ表示装置730によって提供される合図に従うことにより、オペレータ740は、間違った操舵決定から生じるかもしれない当て推量や潜在的な事故を伴わずに、航空機700を正しく操舵することができる。
【0064】
図8は、航空機をタキシングするための操舵方法800の特定の一実施形態のフローチャートである。特定の例示的な一実施形態では、方法800は、図5の前脚ステアリングシステム550など、航空機に搭載された前脚ステアリングシステムによって実施することができる。別法として、別の特定の例示的な実施形態によれば、航空機の機外で方法800を使用して適切な前脚オーバーステアリングを決定し、航空機に通信することができる。
【0065】
特定の例示的な一実施形態によれば、802で、曲線区間を有する誘導路に対して相対的な航空機の場所が決定される。例えば、図5に関して述べたように、航空機の場所は、1つまたは複数の位置信号送信機584から1つまたは複数の位置信号582を受信し、1つまたは複数の位置信号582から決定される位置情報をメモリ590に記憶されたマップ592と比較することによって、決定することができる。804で、曲線区間の第1の部分を通って航空機を操舵するための第1の前脚ステアリング角度が決定される。第1の前脚ステアリング角度は、航空機の前脚を誘導路中心線から逸れさせるように選択される。第1の前脚ステアリング角度は、曲線区間の少なくとも第1の部分を航空機が横断する際に航空機のステアリングポイントをほぼ誘導路中心線の上に保持するように選択される。ステアリングポイントは、図2〜4に関して先に説明したように、航空機の前脚と主脚との間に位置することができる。
【0066】
図9は、航空機をタキシングする方法の一実施形態のコンピュータ実装方法を実施するかまたはコンピュータ実行可能命令を処理するように動作可能な汎用コンピュータシステムのブロック図である。特定の例示的な一実施形態によれば、コンピュータシステム900は、図5〜7に関して述べたように、航空機などの車両に搭載されるように位置決めすることができる。例示的な一実施形態では、コンピューティングデバイス910が、少なくとも1つのプロセッサ920を備えることができる。特定の例示的な一実施形態によれば、図6に関して述べたように、プロセッサ920は、前脚を自動的にオーバーステアする方法を実施するための命令を実行するように構成することができる。別の特定の例示的な実施形態によれば、図7に関して述べたように、プロセッサ920は、航空機を誘導路の表面上に維持するための前脚オーバーステアリング合図を提供することができる。プロセッサ920は、システムメモリ930、1つまたは複数の記憶デバイス940、および、入出力インタフェース950を介した1つまたは複数の入力デバイス970と通信することができる。特定の例示的な一実施形態によれば、1つまたは複数の入力デバイス970は、図5の受信機580や光学システム586など、1つまたは複数の位置決めデバイス570を含むことができる。プロセッサ920はまた、1つまたは複数の受信機または他の通信インタフェース960を介して、位置信号582(図5)を受信するか、そうでない場合は1つまたは複数の他のコンピュータシステム980または他のデバイスと通信することができる。
【0067】
システムメモリ930は、ランダムアクセスメモリ(RAM)デバイスなどの揮発性メモリデバイスと、読取専用メモリ(ROM)、プログラム可能な読取専用メモリ、およびフラッシュメモリなどの不揮発性メモリデバイスとを含めた、非一時的なメモリデバイスを含むことができる。特定の例示的な一実施形態によれば、システムメモリ930はオペレーティングシステム932を含むことができ、オペレーティングシステム932は、コンピューティングデバイス910をブートするためのBIOS(basic input/output system)、ならびに、コンピューティングデバイス910がユーザ、他のプログラム、および他のデバイスと対話できるようにするための完全なオペレーティングシステムを含むことができる。別の特定の例示的な実施形態によれば、システムメモリ930はまた、前述のように、航空機をオーバーステアするようにコンピューティングデバイス910を構成するための命令や、誘導路に対して相対的な航空機の位置を決定するのを補助するためのマップなど、1つまたは複数のアプリケーションプログラム934を含むことができる。
【0068】
プロセッサ920はまた、1つまたは複数の記憶デバイス940と通信することができる。特定の例示的な一実施形態によれば、記憶デバイス940は、磁気ディスク、光ディスク、またはフラッシュメモリデバイスなど、不揮発性記憶デバイスを含むことができる。別の特定の例示的な実施形態によれば、記憶デバイス940は、オペレーティングシステム932、アプリケーション934、プログラムデータ936、またはこれらの任意の組合せを記憶するように構成することができる。
【0069】
本明細書に述べた実施形態の例示は、様々な実施形態の構造の一般的な理解を提供することを意図したものである。これらの例示は、本明細書に述べた構造または方法を利用する装置およびシステムの全ての要素および特徴の完全な記述としての働きをするものとはしない。本開示を検討すれば、多くの他の実施形態が当業者には明らかであろう。本開示から他の実施形態を利用および導出することができ、したがって、本開示の範囲を逸脱することなく構造的および論理的な置換および変更を行うことができる。例えば、図示した順序とは異なる順序で方法ステップを実施してもよく、あるいは1つまたは複数の方法ステップを省略してもよい。したがって、本開示および図は、限定的ではなく例示的なものと見なすべきである。
【0070】
さらに、本明細書では特定の実施形態について例示および記述したが、示した特定の実施形態を、同じまたは類似の結果を達成するように設計された任意の後続の構成で置換できることを理解されたい。本開示は、様々な実施形態の、いずれかおよび全ての後続の適応または変形をカバーするものとする。本記述を検討すれば、以上の実施形態および本明細書で特に述べられていない他の実施形態の組合せも、当業者には明らかになるであろう。
【0071】
「要約書」は、請求項の範囲または意味を解釈または限定するために使用されることはないものと理解して提出される。加えて、前述の「発明を実施するための形態」では、開示を合理化する目的で、様々な特徴を共にグループ化する場合、または単一の実施形態において述べている場合がある。本開示は、特許請求される実施形態が、各請求項で明示的に列挙されるよりも多くの特徴を必要とするという意図を反映するものと解釈すべきではない。そうではなく、以下の特許請求の範囲が反映するように、特許請求される主題は、開示されるいずれかの実施形態の全ての特徴よりも少ない特徴を対象とすることができる。
【符号の説明】
【0072】
200 誘導路ターン
210 第1の航空機
211 胴体
212 前脚
213 推進システム
214 左主脚
216 右主脚
220 ステアリングポイント
230 誘導路
232 誘導路の左(外側)縁部
234 誘導路の右(内側)縁部
235 誘導路中心線
240 前脚オーバーステアリング経路
250 航空機中心線
250 誘導路の直線路
260 第2の航空機
261 胴体
262 前脚
263 推進システム
264 左主脚
266 右主脚
270 ステアリングポイント
300 誘導路ターン
302 逸脱ポイント
304 収束ポイント
310 サンプル区間
312 前脚
320 サンプル区間の拡大
335 誘導路中心線
340 前脚オーバーステアリング経路
351 第1のポイントにおける航空機中心線の配向
352 第2のポイントにおける航空機中心線の配向
353 第3のポイントにおける航空機中心線の配向
371 第1のポイント
372 第2のポイント
373 第3のポイント
374 第4のポイント
381 第1のセグメント
382 第2のセグメント
383 第3のセグメント
391 第1の前脚ステアリング角度
392 第2の前脚ステアリング角度
393 第3の前脚ステアリング角度
400 航空機
402 航空機の中心線
404 前脚
406 主脚
408 主脚軸
410 参照配向軸
412 前脚−主脚距離W35
414 ステアリングポイント−主脚距離W34
416 中心線から第1の位置の曲率半径の原点までの距離R30
418 ステアリングポイントP41 420と、ターンの第1の部分435の湾曲439の半径の原点427との間の半径R31
419 前脚半径R32
420 ステアリングポイントP41
422 誘導路中心線上の終点
426 ステアリングポイントP41 420とターンの第1の部分435の終点422との間の直線距離D33
427 ターンの第1の部分435の湾曲439の半径の原点P40
430 機首方位角度A22
432 第1の前脚ステアリング角度A24
434 ステアリングポイント機首方位A23
435 ターンの第1の部分
437 ターンの第1の部分435の湾曲439に対する接線
439 ターンの第1の部分の湾曲
441 ステアリングポイントP41 420における、航空機400の中心線402とターンの第1の部分435の湾曲439に対する接線437との間の角度(ステアリングポイント角度)A20
470 ステアリングポイントP41 420における、接線437と、ステアリングポイントP41 420と終点422との間の直線距離D33 426を定義する線分との間の角度A21
471 終点422へのステアリングポイントP41 420の角運動を表す角度
500 空港または飛行場
510 航空機
512 前脚
514 左主脚
516 右主脚
520 ステアリングポイント
530 誘導路
532 誘導路の左(外側)縁部
534 誘導路の右(内側)縁部
535 誘導路中心線
550 前脚ステアリングシステム
560 プロセッサ
570 位置決めデバイス
580 受信機
582 位置信号
584 位置信号送信機
586 光学システム
588 参照インジケータ
590 メモリ
592 マップ
594 命令
600 航空機
612 前脚
620 制御信号
630 前脚アクチュエータ
650 自動タキシング(autotaxi)システム
700 航空機
712 前脚
720 オペレータ信号
730 オペレータ表示装置
740 オペレータ
750 タキシング補助システム
900 コンピュータシステム
910 コンピューティングデバイス
920 プロセッサ
930 システムメモリ
932 オペレーティングシステム
934 アプリケーションプログラム
936 プログラムデータ
940 記憶デバイス
950 入出力インタフェース
960 通信インタフェース
970 入力デバイス
980 他のコンピュータシステム
【特許請求の範囲】
【請求項1】
曲線区間を有する誘導路に対して相対的な航空機の場所を決定するステップと、
前記曲線区間の少なくとも第1の部分を通って前記航空機を操舵するための第1の前脚ステアリング角度を決定するステップとを含む方法であって、前記航空機の前脚を誘導路中心線から逸れさせるように、かつ前記曲線区間の前記少なくとも第1の部分を前記航空機が横断する際に前記航空機のステアリングポイントをほぼ前記誘導路中心線の上に保持するように、前記第1の前脚ステアリング角度が選択され、前記ステアリングポイントが前記航空機の前記前脚と主脚との間に位置する、方法。
【請求項2】
前記ステアリングポイントが前記航空機の中心線上にある、請求項1に記載の方法。
【請求項3】
前記ステアリングポイントが、前記前脚と前記主脚との間の距離、前記航空機の前記中心線と前記主脚との間の距離、または前記距離のいずれかの組合せに基づいて選択される、請求項2に記載の方法。
【請求項4】
前記ステアリングポイントが前記第1の部分の終点に近いとの決定に応じて、前記曲線の第2の部分を選択するステップをさらに含む、請求項1に記載の方法。
【請求項5】
前記誘導路に対して相対的な前記航空機の前記場所を決定するステップが、
前記航空機の位置を示す信号を受信して前記航空機の前記位置を前記誘導路の電子マップと比較するステップと、
光学システムとレーザ撮像検出および測距(LIDAR)システムとの少なくとも一方を使用して複数の参照インジケータに対して相対的な前記航空機の前記場所を決定するステップとのうちの1つまたは複数を含む、請求項1に記載の方法。
【請求項6】
前記前脚を前記ステアリング角度で自動的に位置決めするステップをさらに含む、請求項1に記載の方法。
【請求項7】
前記航空機のオペレータが前記前脚を前記ステアリング角度に調整および位置決めできるようにするための情報を前記航空機の前記オペレータに提供するオペレータ信号を生成するステップをさらに含む、請求項1に記載の方法。
【請求項8】
前記第1の前脚ステアリング角度が、前記航空機の前脚を誘導路中心線から逸れさせるように、かつ前記曲線区間の前記少なくとも第1の部分を前記航空機が横断する際に前記航空機のステアリングポイントをほぼ前記誘導路中心線の上に保持するように選択される、曲線区間を有する誘導路に対して相対的な航空機の場所に基づいて、前記曲線区間の少なくとも第1の部分を通って前記航空機を操舵するための第1の前脚ステアリング角度の自動的な決定、および
前記航空機が前記第1の前脚ステアリング角度に従って操舵されるように動作可能な信号の生成
を行うようにプロセッサによって実行可能な命令を記憶した非一時的なコンピュータ可読記憶媒体。
【請求項9】
前記曲線区間を有する前記誘導路に対して相対的な前記航空機の前記場所が、
前記航空機の位置を示す信号を受信すること、および
前記航空機の前記位置を前記誘導路の電子マップと比較することによって決定される、請求項8に記載の非一時的なコンピュータ可読記憶媒体。
【請求項10】
前記信号が、
前記航空機を前記第1の前脚ステアリング角度に従って操舵するように構成された
自動タキシングシステムに提示される制御信号と、
前記第1の前脚ステアリング角度を示す表示装置に提示されるオペレータ信号とのうちの一方を含む、請求項8に記載の非一時的なコンピュータ可読記憶媒体。
【請求項11】
航空機であって、
中心線を有する胴体と、
前記胴体から延びる前脚であり、曲線区間を含む誘導路の一部に沿って前記航空機を方向付けるように操舵可能な前脚と、
前記胴体から延びる主脚と、
前記誘導路に沿ってタキシングするために前記航空機に動力供給するように動作可能な推進システムと、
前脚ステアリングシステムとを備え、前記前脚ステアリングシステムが、
プロセッサと、
前記プロセッサに動作可能に結合され、位置信号を受信するように構成された受信機と、
前記位置信号に基づいて前記誘導路に対する相対的な前記航空機の場所の決定、および
前記航空機の前記前脚を誘導路中心線から逸れさせるように、かつ前記曲線区間の前記少なくとも第1の部分を前記航空機が横断する際に、前記航空機のステアリングポイントをほぼ前記誘導路中心線の上に保持するように、前記第1の前脚ステアリング角度が選択される、前記曲線区間の少なくとも第1の部分を通って前記航空機を操舵するための第1の前脚ステアリング角度の決定
を行うように前記プロセッサによって実行可能な命令を含むメモリとを備える、航空機。
【請求項1】
曲線区間を有する誘導路に対して相対的な航空機の場所を決定するステップと、
前記曲線区間の少なくとも第1の部分を通って前記航空機を操舵するための第1の前脚ステアリング角度を決定するステップとを含む方法であって、前記航空機の前脚を誘導路中心線から逸れさせるように、かつ前記曲線区間の前記少なくとも第1の部分を前記航空機が横断する際に前記航空機のステアリングポイントをほぼ前記誘導路中心線の上に保持するように、前記第1の前脚ステアリング角度が選択され、前記ステアリングポイントが前記航空機の前記前脚と主脚との間に位置する、方法。
【請求項2】
前記ステアリングポイントが前記航空機の中心線上にある、請求項1に記載の方法。
【請求項3】
前記ステアリングポイントが、前記前脚と前記主脚との間の距離、前記航空機の前記中心線と前記主脚との間の距離、または前記距離のいずれかの組合せに基づいて選択される、請求項2に記載の方法。
【請求項4】
前記ステアリングポイントが前記第1の部分の終点に近いとの決定に応じて、前記曲線の第2の部分を選択するステップをさらに含む、請求項1に記載の方法。
【請求項5】
前記誘導路に対して相対的な前記航空機の前記場所を決定するステップが、
前記航空機の位置を示す信号を受信して前記航空機の前記位置を前記誘導路の電子マップと比較するステップと、
光学システムとレーザ撮像検出および測距(LIDAR)システムとの少なくとも一方を使用して複数の参照インジケータに対して相対的な前記航空機の前記場所を決定するステップとのうちの1つまたは複数を含む、請求項1に記載の方法。
【請求項6】
前記前脚を前記ステアリング角度で自動的に位置決めするステップをさらに含む、請求項1に記載の方法。
【請求項7】
前記航空機のオペレータが前記前脚を前記ステアリング角度に調整および位置決めできるようにするための情報を前記航空機の前記オペレータに提供するオペレータ信号を生成するステップをさらに含む、請求項1に記載の方法。
【請求項8】
前記第1の前脚ステアリング角度が、前記航空機の前脚を誘導路中心線から逸れさせるように、かつ前記曲線区間の前記少なくとも第1の部分を前記航空機が横断する際に前記航空機のステアリングポイントをほぼ前記誘導路中心線の上に保持するように選択される、曲線区間を有する誘導路に対して相対的な航空機の場所に基づいて、前記曲線区間の少なくとも第1の部分を通って前記航空機を操舵するための第1の前脚ステアリング角度の自動的な決定、および
前記航空機が前記第1の前脚ステアリング角度に従って操舵されるように動作可能な信号の生成
を行うようにプロセッサによって実行可能な命令を記憶した非一時的なコンピュータ可読記憶媒体。
【請求項9】
前記曲線区間を有する前記誘導路に対して相対的な前記航空機の前記場所が、
前記航空機の位置を示す信号を受信すること、および
前記航空機の前記位置を前記誘導路の電子マップと比較することによって決定される、請求項8に記載の非一時的なコンピュータ可読記憶媒体。
【請求項10】
前記信号が、
前記航空機を前記第1の前脚ステアリング角度に従って操舵するように構成された
自動タキシングシステムに提示される制御信号と、
前記第1の前脚ステアリング角度を示す表示装置に提示されるオペレータ信号とのうちの一方を含む、請求項8に記載の非一時的なコンピュータ可読記憶媒体。
【請求項11】
航空機であって、
中心線を有する胴体と、
前記胴体から延びる前脚であり、曲線区間を含む誘導路の一部に沿って前記航空機を方向付けるように操舵可能な前脚と、
前記胴体から延びる主脚と、
前記誘導路に沿ってタキシングするために前記航空機に動力供給するように動作可能な推進システムと、
前脚ステアリングシステムとを備え、前記前脚ステアリングシステムが、
プロセッサと、
前記プロセッサに動作可能に結合され、位置信号を受信するように構成された受信機と、
前記位置信号に基づいて前記誘導路に対する相対的な前記航空機の場所の決定、および
前記航空機の前記前脚を誘導路中心線から逸れさせるように、かつ前記曲線区間の前記少なくとも第1の部分を前記航空機が横断する際に、前記航空機のステアリングポイントをほぼ前記誘導路中心線の上に保持するように、前記第1の前脚ステアリング角度が選択される、前記曲線区間の少なくとも第1の部分を通って前記航空機を操舵するための第1の前脚ステアリング角度の決定
を行うように前記プロセッサによって実行可能な命令を含むメモリとを備える、航空機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−126386(P2012−126386A)
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【外国語出願】
【出願番号】特願2011−261342(P2011−261342)
【出願日】平成23年11月30日(2011.11.30)
【出願人】(500520743)ザ・ボーイング・カンパニー (773)
【氏名又は名称原語表記】The Boeing Company
【Fターム(参考)】
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願番号】特願2011−261342(P2011−261342)
【出願日】平成23年11月30日(2011.11.30)
【出願人】(500520743)ザ・ボーイング・カンパニー (773)
【氏名又は名称原語表記】The Boeing Company
【Fターム(参考)】
[ Back to top ]