
航空機位置測定システム、該システムに用いられる応答信号判別方法及び応答信号判別プログラム
【課題】受信局で受信される信号のみでモードA応答かモードC応答かが判別可能な航空機位置測定システムを提供する。
【解決手段】位置情報処理手段(データ処理部30)では、応答信号種類判別手段(受信情報収集部31、信号抽出記録部34、モードC信号変換部35、モードC信号種類判定部36、モードA信号変換部37、モードA信号種類判定部38)により、各受信局21,22,…,25で受信された応答信号のビット列が気圧高度情報(モードCコード)に変換されると共に、同気圧高度情報と幾何学的高度情報とが比較され、この比較結果に基づいて、上記応答信号がモードA信号に対応するモードA応答か上記モードC信号に対応するモードC応答かが判別される。
【解決手段】位置情報処理手段(データ処理部30)では、応答信号種類判別手段(受信情報収集部31、信号抽出記録部34、モードC信号変換部35、モードC信号種類判定部36、モードA信号変換部37、モードA信号種類判定部38)により、各受信局21,22,…,25で受信された応答信号のビット列が気圧高度情報(モードCコード)に変換されると共に、同気圧高度情報と幾何学的高度情報とが比較され、この比較結果に基づいて、上記応答信号がモードA信号に対応するモードA応答か上記モードC信号に対応するモードC応答かが判別される。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、航空機位置測定システム、該システムに用いられる応答信号判別方法及び応答信号判別プログラムに係り、特に、SSR装置(Secondary Surveillance Radar、二次監視レーダ)から航空機へ発信されたモードA(識別)及びモードC(高度)の質問信号に対応する同航空機の応答信号の種類を判別する場合に用いて好適な航空機位置測定システム、該システムに用いられる応答信号判別方法及び応答信号判別プログラムに関する。
【背景技術】
【0002】
航空管制などを行うための航空機位置測定システムとして、マルチラテレーションシステムが製作されている。マルチラテレーションシステムでは、航空機のトランスポンダから送信される信号(スキッタ信号)が4か所以上の受信局で受信されて、各受信時刻の差に基づいて同航空機の位置が測定される。また、マルチラテレーションシステムの他、特に高度情報を高精度で取得することに特化したHMU(Height Monitoring Unit、高度監視装置)がある。
【0003】
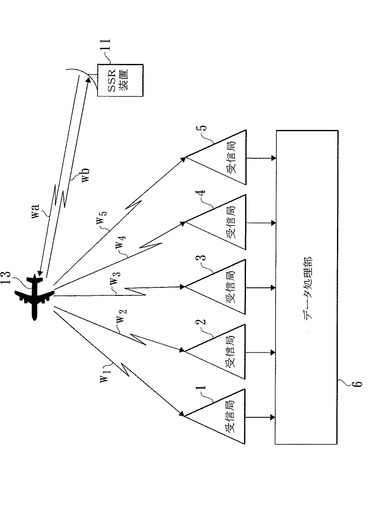
図3は、この種の航空機位置測定システムの概略の構成及び同システムが用いられる環境を示す図である。
この航空機位置測定システムは、同図に示すように、受信局1,2,…,5と、データ処理部6とから構成されている。この航空機位置測定システムでは、受信局1,2,…,5は、それぞれ設置位置情報が確定し、航空機13のトランスポンダから送信される信号w1 ,w2 ,…,w5 を受信する。そして、データ処理部6により、各受信局1,2,…,5の設置位置情報及び同各受信局1,2,…,5で信号w1 ,w2 ,…,w5 をそれぞれ受信したときの受信時刻の差情報に基づいて、双曲線測位方式により、航空機13の飛行位置情報が求められる。飛行位置情報は、緯度、経度及び幾何学的高度からなっている。
【0004】
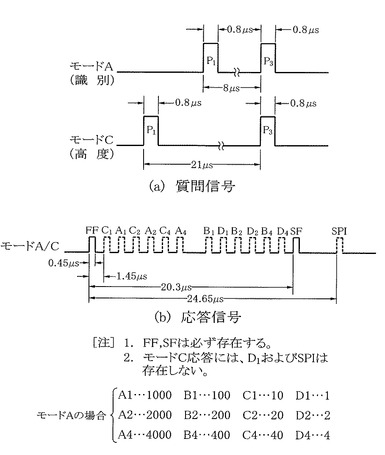
また、SSR装置11により、図4(a)に示すように、航空機13の識別情報を要求するためのモードA信号(パルス間隔8μs)と同航空機13の高度情報を要求するためのモードC信号(パルス間隔21μs)とを含む質問信号waが同航空機13に向けて発信され、また、図4(b)に示すように、同質問信号waに対する同航空機13による応答信号wbが受信される。また、質問信号waに対する航空機13による応答は、上記信号w1 ,w2 ,…,w5 として受信局1,2,…,5で受信される。応答信号wbは、搬送波を1090MHzとする12ビットのパルス列で構成されている。これにより、最大識別数は4096であり、高度データは、100ft単位で高度−1000ftから126750ftまでコード化される。上記12ビットのパルス列は、パルスA1 (;1000),A2 (;2000),A4 (;4000),B1 (;100),B2 (;200),B4 (;400),C1 (;10),C2 (;20),C4 (;40),D1 (;1),D2 (;2),D4 (;4)から構成され、8進数に対応している。
【0005】
上記の航空機位置測定システムの他、この種の関連技術としては、たとえば、特許文献1に記載された航空機騒音監視システムがある。
この監視システムでは、騒音測定局から出力された測定位置を代表するデータに基づいて騒音の測定位置が特定され、マルチラテレーション測位によって算出された航空機の位置との一致/不一致が判定されるか、あるいは、受信局から出力された識別情報の受信時刻と騒音測定局から出力された騒音レベルの測定時刻との一致/不一致が判定される。これにより、複数箇所に設置された騒音測定局から騒音レベルのデータが送信される場合でも、どの騒音測定局から送信された騒音レベルのデータが測位対象となっている航空機に関する騒音レベルであるのかが的確に判定され、複数の騒音測定局を設置して広範囲にわたって航空機の騒音が正確に測定される。
【0006】
また、特許文献2に記載されたモードS二次監視レーダでは、モードSトランスポンダ搭載の航空機に向けて質問が送信され、当該質問に対する応答が解読されて航空機が特定される。監視結果の検出レポート作成に必要なモードAコードは、初期捕捉後の複数回のスキャンによって取得されたモードAコードの同一性が得られたとき、以後のモードAコードの質問を行うことなく、その一致したモードAコードが採用され、当該航空機の検出レポートが作成される。これにより、より信頼性の高い検出レポートが生成される。
【0007】
また、特許文献3に記載された空港面監視装置では、空港に配置された複数の地上局により、目標が発信する信号が受信され、マルチラテレーションにより、受信信号の到達時間差に基づいて、目標の3次元位置情報が算出されると共に、目標の識別情報が得られる。目標高度監視装置により、3次元位置情報に基づいて、目標が空港上空を低高度で飛行しているか、飛行せず、空港面上に在るかの判定が行われる。統合処理装置により、当該判定結果に基づいて、空港面探知レーダとマルチラテレーションとで算出された目標の位置情報が統合処理され、得られた位置情報に、対応する識別情報が付加される。表示装置により、統合された目標の位置情報と識別情報とが、空港面を表す座標上に表示される。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2002−365126号公報
【特許文献2】特開2008−026305号公報
【特許文献3】特開2007−333427号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、上記関連技術では、次のような課題があった。
すなわち、図3中のSSR装置11では、自身が航空機13に対してモードA信号とモードC信号とを含む質問信号waを送信するので、受信した応答信号wbがモードA応答なのかモードC応答なのかを判別可能であるが、データ処理部6では、受信局1,2,…,5で受信される信号w1 ,w2 ,…,w5 のみでは、モードA応答かモードC応答かが判別不可能であるという課題がある。
【0010】
また、特許文献1に記載された監視システムでは、広範囲にわたって航空機の騒音が正確に測定されるが、複数の騒音測定局が設けられているなど、この発明とは構成や効果が異なる。
【0011】
特許文献2に記載されたモードS二次監視レーダでは、信頼性の高い検出レポートが生成可能であるが、二次監視レーダとしての発明であり、この発明とは構成が異なる。
【0012】
特許文献3に記載された空港面監視装置では、空港面探知レーダによる空港面監視が、マルチラテレーションの情報が統合されることで補完され、効率的で安全な空港管制が行われるが、地上局で受信された信号に対してモードA応答/モードC応答の判別を行うものではなく、上記の課題は解決されない。
【0013】
この発明は、上述の事情に鑑みてなされたもので、各受信局で受信される信号のみで、モードA応答かモードC応答かが判別可能な航空機位置測定システム、該システムに用いられる応答信号判別方法及び応答信号判別プログラムを提供することを目的としている。
【課題を解決するための手段】
【0014】
上記課題を解決するために、この発明の第1の構成は、設置位置情報が確定し、航空機から送信される信号を受信する所定数の受信局と、前記各受信局の前記設置位置情報及び前記各受信局で前記信号を受信したときの受信時刻の差情報に基づいて、前記航空機の飛行位置情報を求める位置情報処理手段とを備え、前記航空機の飛行位置情報は、緯度情報、経度情報及び幾何学的高度情報からなる航空機位置測定システムに係り、前記航空機の識別情報を要求するためのモードA信号と該航空機の高度情報を要求するためのモードC信号とを含む質問信号を前記航空機に向けて発信する二次監視レーダが設けられ、前記各受信局は、前記二次監視レーダの前記質問信号に対応する前記航空機の応答信号を受信する構成とされ、前記位置情報処理手段は、前記各受信局で受信された前記応答信号を気圧高度情報に変換すると共に、該気圧高度情報と前記幾何学的高度情報とを比較し、この比較結果に基づいて、前記応答信号が前記モードA信号に対応するモードA応答か前記モードC信号に対応するモードC応答かを判別する応答信号種類判別手段が設けられていることを特徴としている。
【0015】
この発明の第2の構成は、設置位置情報が確定し、航空機から送信される信号を受信する所定数の受信局と、前記各受信局の前記設置位置情報及び前記各受信局で前記信号を受信したときの受信時刻の差情報に基づいて、前記航空機の飛行位置情報を求める位置情報処理手段とを備え、前記航空機の飛行位置情報は、緯度情報、経度情報及び幾何学的高度情報からなる航空機位置測定システムに用いられる応答信号判別方法に係り、前記航空機の識別情報を要求するためのモードA信号と該航空機の高度情報を要求するためのモードC信号とを含む質問信号を前記航空機に向けて発信する二次監視レーダが設けられ、前記各受信局は、前記二次監視レーダの前記質問信号に対応する前記航空機の応答信号を受信する構成とされ、前記位置情報処理手段では、応答信号種類判別手段が、前記各受信局で受信された前記応答信号を気圧高度情報に変換すると共に、該気圧高度情報と前記幾何学的高度情報とを比較し、この比較結果に基づいて、前記応答信号が前記モードA信号に対応するモードA応答か前記モードC信号に対応するモードC応答かを判別する応答信号種類判別処理を行うことを特徴としている。
【発明の効果】
【0016】
この発明の構成によれば、位置情報処理手段により、各受信局で受信される信号に含まれる応答信号のモードA応答/モードC応答の判別を自律的に行うことができる。
【図面の簡単な説明】
【0017】
【図1】この発明の一実施形態である航空機位置測定システムの概略の構成及び同システムが用いられる環境を示す図である。
【図2】図1の航空機位置測定システムの動作を示す模式図である。
【図3】航空機位置測定システムの概略の構成及び同システムが用いられる環境を示す図である。
【図4】質問信号及び応答信号を示す波形図である。
【発明を実施するための形態】
【0018】
上記応答信号種類判別手段(受信情報収集部、位置解析部、受信局位置記録部、信号抽出記録部、モードC信号変換部、モードC信号種類判定部、モードA信号変換部、モードA信号種類判定部、モードA/C情報収集相関更新部)が、上記気圧高度情報の値と上記幾何学的高度情報の値との差分が所定の閾値以下のとき、上記応答信号を上記モードC応答として判定する一方、上記差分が上記閾値を超えるとき、上記応答信号を上記モードA応答として判定する構成とされている航空機位置測定システムを実現する。
【0019】
上記応答信号種類判別手段は、上記各受信局で受信された上記応答信号を上記モードC応答として扱い、該応答信号のビット列を上記気圧高度情報に対応するモードCコードに変換する気圧高度情報変換手段(モードC信号変換部)と、同気圧高度情報変換手段で変換された上記気圧高度情報のモードCコードと上記幾何学的高度情報とを比較し、上記気圧高度情報の値と上記幾何学的高度情報の値との差分が所定の閾値以下のとき、上記応答信号を上記モードC応答として判定するモードC応答判定手段(モードC信号種類判定部)と、上記各受信局で受信された上記応答信号を上記モードA応答として扱い、該応答信号のビット列を上記識別情報に対応するモードAコードに変換する識別情報変換手段(モードA信号変換部)と、同識別情報変換手段で変換された上記モードAコードのうちの上記モードC応答以外のビット列を上記モードA応答として判定するモードA応答判定手段(モードA信号種類判定部)とを備えている。
【0020】
また、上記応答信号種類判別手段は、上記モードC応答判定手段で判定された上記モードC応答、及び上記モードA応答判定手段で判定された上記モードA応答を記録し、次に上記各受信局で受信された上記応答信号と比較して相関度を求め、該相関度が所定値以上の場合、上記モードC応答及びモードA応答の記録を更新する応答記録更新手段(モードA/C情報収集相関更新部)が設けられている。また、上記応答信号種類判別手段は、上記各受信局で受信された上記応答信号を格納する応答信号格納手段(受信情報収集部)を有している。
【実施形態】
【0021】
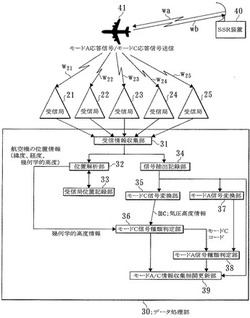
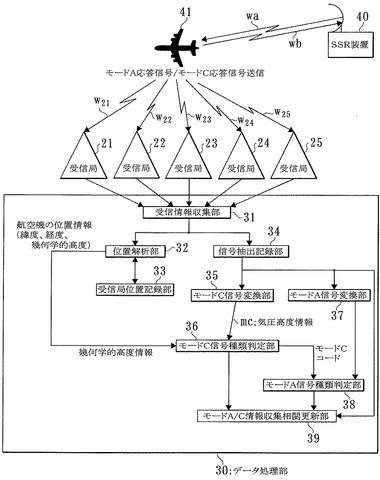
図1は、この発明の一実施形態である航空機位置測定システムの概略の構成及び同システムが用いられる環境を示す図である。
この形態の航空機位置測定システムは、同図に示すように、受信局21,22,…,25と、データ処理部30と、SSR装置40とから構成されている。SSR装置40は、航空機41の識別情報を要求するためのモードA信号と同航空機41の高度情報を要求するためのモードC信号とを含む質問信号waを同航空機41に向けて発信すると共に、同航空機41のモードA信号に対応するモードA応答及びモードC信号に対応するモードC応答からなる応答信号wbを受信する。受信局21,22,…,25は、たとえば空港などの所定の場所に設置されて設置位置情報が確定し、航空機41のトランスポンダから送信される信号w21,w22,…,w25を受信する。特に、この実施形態では、受信局21,22,…,25は、SSR装置40の質問信号waに対応する航空機41の上記応答信号wbを含む信号を上記信号w21,w22,…,w25として受信する。
【0022】
データ処理部30は、応答信号判別プログラムに基づいて応答信号種類判別手段として機能するコンピュータで構成され、受信情報収集部31と、位置解析部32と、受信局位置記録部33と、信号抽出記録部34と、モードC信号変換部35と、モードC信号種類判定部36と、モードA信号変換部37と、モードA信号種類判定部38と、モードA/C情報収集相関更新部39とから構成されている。受信情報収集部31は、バッファで構成され、各受信局21,22,…,25で受信された信号w21,w22,…,w25を格納する。受信局位置記録部33は、受信局21,22,…,25の各設置位置情報をあらかじめ記録する。位置解析部32は、受信局位置記録部33に記録されている各受信局21,22,…,25の設置位置情報及び同各受信局21,22,…,25で信号w21,w22,…,w25を受信したときの受信時刻の差情報に基づいて、双曲線測位方式により、航空機41の飛行位置情報(緯度情報、経度情報及び幾何学的高度情報)を求める。
【0023】
信号抽出記録部34は、受信情報収集部31に格納された信号w21,w22,…,w25の中からモードAコード及びモードCコードを含む応答信号を抽出して記録する。モードC信号変換部35は、信号抽出記録部34に記録されている応答信号をモードC応答として扱い、同応答信号のビット列を気圧高度情報に対応するモードCコードmcに変換する。モードC信号種類判定部36は、モードC信号変換部35で変換された上記気圧高度情報のモードCコードmcと上記幾何学的高度情報とを比較し、同気圧高度情報の値と同幾何学的高度情報の値との差分が所定の閾値以下のとき、上記応答信号をモードC応答として判定する。
【0024】
モードA信号変換部37は、信号抽出記録部34に記録されている応答信号をモードA応答として扱い、同応答信号のビット列を識別情報に対応するモードAコードmaに変換する。モードA信号種類判定部38は、モードA信号変換部37で変換されたモードAコードmaのうちのモードC応答以外のビット列をモードA応答として判定する。モードA/C情報収集相関更新部39は、モードC信号種類判定部36で判定されたモードC応答、及びモードA信号種類判定部38で判定されたモードA応答を記録し、次に各受信局21,22,…,25で受信された信号w21,w22,…,w25中の応答信号(すなわち、信号抽出記録部34で記録されている応答信号)と比較して相関度を求め、相関度が所定値以上の場合、上記モードC応答及びモードA応答の記録を更新する。
【0025】
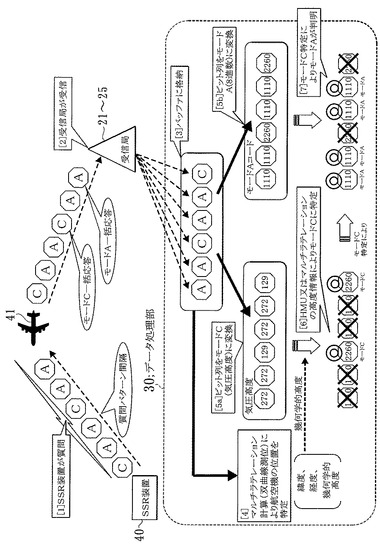
図2は、図1の航空機41位置測定システムの動作を示す模式図である。
この図を参照して、この形態の航空機位置測定システムに用いられる応答信号判別方法の処理内容について説明する。
この航空機位置測定システムでは、応答信号格納手段(受信情報収集部31)により、各受信局21,22,…,25で受信された応答信号が格納される(応答信号格納処理)。位置情報処理手段(データ処理部30)では、応答信号種類判別手段(受信情報収集部31、信号抽出記録部34、モードC信号変換部35、モードC信号種類判定部36、モードA信号変換部37、モードA信号種類判定部38)により、各受信局21,22,…,25で受信された応答信号のビット列が気圧高度情報(モードCコード)に変換されると共に、同気圧高度情報と幾何学的高度情報とが比較され、この比較結果に基づいて、上記応答信号がモードA信号に対応するモードA応答か上記モードC信号に対応するモードC応答かが判別される(応答信号種類判別処理)。この応答信号種類判別処理では、気圧高度情報の値と幾何学的高度情報の値との差分が所定の閾値以下のとき、上記応答信号がモードC応答として判定される一方、同差分が同閾値を超えるとき、同応答信号がモードA応答として判定される。
【0026】
この場合、気圧高度情報変換手段(モードC信号変換部35)により、信号抽出記録部34に記録されている応答信号が読み出されて同応答信号がモードC応答として扱われ、同応答信号のビット列が気圧高度情報に対応するモードCコードに変換される(気圧高度情報変換処理)。そして、モードC応答判定手段(モードC信号種類判定部36)により、モードC信号変換部35で変換された気圧高度情報のモードCコードと位置解析部32で求められた幾何学的高度情報とが比較され、同気圧高度情報の値と同幾何学的高度情報の値との差分が所定の閾値以下のとき、上記応答信号がモードC応答として判定される(モードC応答判定処理)。
【0027】
また、識別情報変換手段(モードA信号変換部37)により、信号抽出記録部34に記録されている応答信号が読み出されて同応答信号がモードA応答として扱われ、同応答信号のビット列が識別情報に対応するモードAコードに変換される(識別情報変換処理)。 モードA応答判定手段(モードA信号種類判定部38)により、モードA信号変換部37で変換された上記モードAコードのうちのモードC応答以外のビット列がモードA応答として判定される(モードA応答判定処理)。応答記録更新手段(モードA/C情報収集相関更新部39)により、モードC信号種類判定部36で判定されたモードC応答、及びモードA信号種類判定部38で判定されたモードA応答が記録され、信号抽出記録部34に記録されている応答信号と比較されて相関度が求められ、同相関度が所定値以上の場合、モードC応答及びモードA応答の記録が更新される(応答記録更新処理)。
【0028】
すなわち、図2に示すように、フェーズ[1]では、SSR装置40から、質問信号waとしてモードAの質問信号“A”もしくはモードCの質問信号“C”が、たとえば、“A”,“A”,“C”,“A”,“A”,“C”のパターンで航空機41に送信される。フェーズ[2]では、フェーズ[1]でのSSR装置40の質問信号waに対する航空機41の応答信号が、たとえば、“A”,“A”,“C”,“A”,“A”,“C”のパターンで受信局21,22,…,25で受信される。フェーズ[3]では、応答信号がデータ処理部30中の受信情報収集部31のバッファに格納される。フェーズ[4]では、位置解析部32にて、マルチラテレーション計算(双曲線測位)により、航空機41の位置(緯度、経度、幾何学的高度)が検出される。
【0029】
フェーズ[5a]では、受信情報収集部31のバッファに格納されている応答信号が信号抽出記録部34により抽出され、モードC信号変換部35により同応答信号がモードC応答として扱われ、同応答信号のビット列がモードCコード(気圧高度)に変換される。また、フェーズ[5b]では、信号抽出記録部34により抽出された応答信号がモードA信号変換部37によりモードA応答として扱われ、同応答信号のビット列がモードAコード(8進数)に変換される。フェーズ[6]では、モードC信号種類判定部36により、フェーズ[5a]で算出された気圧高度と、フェーズ[4]のマルチラテレーション計算により取得された幾何学的高度とが比較され、これらの値が近ければ、その応答がモードC応答に特定される。フェーズ[7]では、フェーズ[6]でモードCが特定されたことで、モードA信号種類判定部38により、モードA応答が判明する。
【0030】
以上のように、この実施形態では、データ処理部30により、受信局21,22,…,25で受信される信号w21,w22,…,w25に含まれる応答信号wbがモードA応答なのかモードC応答なのかが判別可能となる。また、データ処理部30は、他の装置、たとえば、既存のSSR装置やRDP(Radar Data Processor、航空路レーダ情報処理システム)などに接続することなく、航空機41の気圧高度情報及び識別情報を取得できる。また、モードA/C情報収集相関更新部39により、記録されているモードC応答及びモードA応答と、次に各受信局21,22,…,25で受信された信号w21,w22,…,w25中の応答信号との相関度が求められ、更新処理が行われるので、より精度の高いモードA/C判定が行われると共に、航空機41の速度の範囲内で、次の位置情報及び高度情報の予測が行われる。また、何らかの原因により受信局21,22,…,25で信号w21,w22,…,w25が受信されなかったり、誤解読された場合には、モードA/C情報収集相関更新部39により、そのデータが明らかに今までの航空機41のものと異なることがわかり、モードA応答/モードC応答の区別精度が高められる。
【0031】
以上、この発明の実施形態を図面により詳述してきたが、具体的な構成は同実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計の変更などがあっても、この発明に含まれる。
たとえば、SSR装置40から航空機41に送信される質問信号wa、及び航空機41の応答信号は、図2中の“A”,“A”,“C”,“A”,“A”,“C”のパターンに限定されない。また、受信局の数は、4つ以上であれば良い。また、図1中のSSR装置40に代えて、他に分散配置されているSSR装置を用いても、上記実施形態とほぼ同様の作用、効果が得られる。
【産業上の利用可能性】
【0032】
この発明は、マルチラテレーションシステムやHMU(Height Monitoring Unit、高度監視装置)など、二次監視レーダ(SSR装置)に直接接続されない航空機位置測定システム全般に適用できる。
【符号の説明】
【0033】
21,22,…,25 受信局
30 データ処理部(位置情報処理手段の一部)
31 受信情報収集部(応答信号種類判別手段の一部、)
32 位置解析部(応答信号種類判別手段の一部)
33 受信局位置記録部(応答信号種類判別手段)
34 信号抽出記録部(応答信号種類判別手段)
35 モードC信号変換部(応答信号種類判別手段の一部、気圧高度情報変換手段)
36 (応答信号種類判別手段の一部、モードC応答判定手段)
37 モードA信号変換部(応答信号種類判別手段の一部、識別情報変換手段)
38 モードA信号種類判定部(応答信号種類判別手段の一部、モードA応答判定手段)
39 モードA/C情報収集相関更新部(応答信号種類判別手段の一部、応答記録更新手段)
40 SSR装置
41 航空機
【技術分野】
【0001】
この発明は、航空機位置測定システム、該システムに用いられる応答信号判別方法及び応答信号判別プログラムに係り、特に、SSR装置(Secondary Surveillance Radar、二次監視レーダ)から航空機へ発信されたモードA(識別)及びモードC(高度)の質問信号に対応する同航空機の応答信号の種類を判別する場合に用いて好適な航空機位置測定システム、該システムに用いられる応答信号判別方法及び応答信号判別プログラムに関する。
【背景技術】
【0002】
航空管制などを行うための航空機位置測定システムとして、マルチラテレーションシステムが製作されている。マルチラテレーションシステムでは、航空機のトランスポンダから送信される信号(スキッタ信号)が4か所以上の受信局で受信されて、各受信時刻の差に基づいて同航空機の位置が測定される。また、マルチラテレーションシステムの他、特に高度情報を高精度で取得することに特化したHMU(Height Monitoring Unit、高度監視装置)がある。
【0003】
図3は、この種の航空機位置測定システムの概略の構成及び同システムが用いられる環境を示す図である。
この航空機位置測定システムは、同図に示すように、受信局1,2,…,5と、データ処理部6とから構成されている。この航空機位置測定システムでは、受信局1,2,…,5は、それぞれ設置位置情報が確定し、航空機13のトランスポンダから送信される信号w1 ,w2 ,…,w5 を受信する。そして、データ処理部6により、各受信局1,2,…,5の設置位置情報及び同各受信局1,2,…,5で信号w1 ,w2 ,…,w5 をそれぞれ受信したときの受信時刻の差情報に基づいて、双曲線測位方式により、航空機13の飛行位置情報が求められる。飛行位置情報は、緯度、経度及び幾何学的高度からなっている。
【0004】
また、SSR装置11により、図4(a)に示すように、航空機13の識別情報を要求するためのモードA信号(パルス間隔8μs)と同航空機13の高度情報を要求するためのモードC信号(パルス間隔21μs)とを含む質問信号waが同航空機13に向けて発信され、また、図4(b)に示すように、同質問信号waに対する同航空機13による応答信号wbが受信される。また、質問信号waに対する航空機13による応答は、上記信号w1 ,w2 ,…,w5 として受信局1,2,…,5で受信される。応答信号wbは、搬送波を1090MHzとする12ビットのパルス列で構成されている。これにより、最大識別数は4096であり、高度データは、100ft単位で高度−1000ftから126750ftまでコード化される。上記12ビットのパルス列は、パルスA1 (;1000),A2 (;2000),A4 (;4000),B1 (;100),B2 (;200),B4 (;400),C1 (;10),C2 (;20),C4 (;40),D1 (;1),D2 (;2),D4 (;4)から構成され、8進数に対応している。
【0005】
上記の航空機位置測定システムの他、この種の関連技術としては、たとえば、特許文献1に記載された航空機騒音監視システムがある。
この監視システムでは、騒音測定局から出力された測定位置を代表するデータに基づいて騒音の測定位置が特定され、マルチラテレーション測位によって算出された航空機の位置との一致/不一致が判定されるか、あるいは、受信局から出力された識別情報の受信時刻と騒音測定局から出力された騒音レベルの測定時刻との一致/不一致が判定される。これにより、複数箇所に設置された騒音測定局から騒音レベルのデータが送信される場合でも、どの騒音測定局から送信された騒音レベルのデータが測位対象となっている航空機に関する騒音レベルであるのかが的確に判定され、複数の騒音測定局を設置して広範囲にわたって航空機の騒音が正確に測定される。
【0006】
また、特許文献2に記載されたモードS二次監視レーダでは、モードSトランスポンダ搭載の航空機に向けて質問が送信され、当該質問に対する応答が解読されて航空機が特定される。監視結果の検出レポート作成に必要なモードAコードは、初期捕捉後の複数回のスキャンによって取得されたモードAコードの同一性が得られたとき、以後のモードAコードの質問を行うことなく、その一致したモードAコードが採用され、当該航空機の検出レポートが作成される。これにより、より信頼性の高い検出レポートが生成される。
【0007】
また、特許文献3に記載された空港面監視装置では、空港に配置された複数の地上局により、目標が発信する信号が受信され、マルチラテレーションにより、受信信号の到達時間差に基づいて、目標の3次元位置情報が算出されると共に、目標の識別情報が得られる。目標高度監視装置により、3次元位置情報に基づいて、目標が空港上空を低高度で飛行しているか、飛行せず、空港面上に在るかの判定が行われる。統合処理装置により、当該判定結果に基づいて、空港面探知レーダとマルチラテレーションとで算出された目標の位置情報が統合処理され、得られた位置情報に、対応する識別情報が付加される。表示装置により、統合された目標の位置情報と識別情報とが、空港面を表す座標上に表示される。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2002−365126号公報
【特許文献2】特開2008−026305号公報
【特許文献3】特開2007−333427号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、上記関連技術では、次のような課題があった。
すなわち、図3中のSSR装置11では、自身が航空機13に対してモードA信号とモードC信号とを含む質問信号waを送信するので、受信した応答信号wbがモードA応答なのかモードC応答なのかを判別可能であるが、データ処理部6では、受信局1,2,…,5で受信される信号w1 ,w2 ,…,w5 のみでは、モードA応答かモードC応答かが判別不可能であるという課題がある。
【0010】
また、特許文献1に記載された監視システムでは、広範囲にわたって航空機の騒音が正確に測定されるが、複数の騒音測定局が設けられているなど、この発明とは構成や効果が異なる。
【0011】
特許文献2に記載されたモードS二次監視レーダでは、信頼性の高い検出レポートが生成可能であるが、二次監視レーダとしての発明であり、この発明とは構成が異なる。
【0012】
特許文献3に記載された空港面監視装置では、空港面探知レーダによる空港面監視が、マルチラテレーションの情報が統合されることで補完され、効率的で安全な空港管制が行われるが、地上局で受信された信号に対してモードA応答/モードC応答の判別を行うものではなく、上記の課題は解決されない。
【0013】
この発明は、上述の事情に鑑みてなされたもので、各受信局で受信される信号のみで、モードA応答かモードC応答かが判別可能な航空機位置測定システム、該システムに用いられる応答信号判別方法及び応答信号判別プログラムを提供することを目的としている。
【課題を解決するための手段】
【0014】
上記課題を解決するために、この発明の第1の構成は、設置位置情報が確定し、航空機から送信される信号を受信する所定数の受信局と、前記各受信局の前記設置位置情報及び前記各受信局で前記信号を受信したときの受信時刻の差情報に基づいて、前記航空機の飛行位置情報を求める位置情報処理手段とを備え、前記航空機の飛行位置情報は、緯度情報、経度情報及び幾何学的高度情報からなる航空機位置測定システムに係り、前記航空機の識別情報を要求するためのモードA信号と該航空機の高度情報を要求するためのモードC信号とを含む質問信号を前記航空機に向けて発信する二次監視レーダが設けられ、前記各受信局は、前記二次監視レーダの前記質問信号に対応する前記航空機の応答信号を受信する構成とされ、前記位置情報処理手段は、前記各受信局で受信された前記応答信号を気圧高度情報に変換すると共に、該気圧高度情報と前記幾何学的高度情報とを比較し、この比較結果に基づいて、前記応答信号が前記モードA信号に対応するモードA応答か前記モードC信号に対応するモードC応答かを判別する応答信号種類判別手段が設けられていることを特徴としている。
【0015】
この発明の第2の構成は、設置位置情報が確定し、航空機から送信される信号を受信する所定数の受信局と、前記各受信局の前記設置位置情報及び前記各受信局で前記信号を受信したときの受信時刻の差情報に基づいて、前記航空機の飛行位置情報を求める位置情報処理手段とを備え、前記航空機の飛行位置情報は、緯度情報、経度情報及び幾何学的高度情報からなる航空機位置測定システムに用いられる応答信号判別方法に係り、前記航空機の識別情報を要求するためのモードA信号と該航空機の高度情報を要求するためのモードC信号とを含む質問信号を前記航空機に向けて発信する二次監視レーダが設けられ、前記各受信局は、前記二次監視レーダの前記質問信号に対応する前記航空機の応答信号を受信する構成とされ、前記位置情報処理手段では、応答信号種類判別手段が、前記各受信局で受信された前記応答信号を気圧高度情報に変換すると共に、該気圧高度情報と前記幾何学的高度情報とを比較し、この比較結果に基づいて、前記応答信号が前記モードA信号に対応するモードA応答か前記モードC信号に対応するモードC応答かを判別する応答信号種類判別処理を行うことを特徴としている。
【発明の効果】
【0016】
この発明の構成によれば、位置情報処理手段により、各受信局で受信される信号に含まれる応答信号のモードA応答/モードC応答の判別を自律的に行うことができる。
【図面の簡単な説明】
【0017】
【図1】この発明の一実施形態である航空機位置測定システムの概略の構成及び同システムが用いられる環境を示す図である。
【図2】図1の航空機位置測定システムの動作を示す模式図である。
【図3】航空機位置測定システムの概略の構成及び同システムが用いられる環境を示す図である。
【図4】質問信号及び応答信号を示す波形図である。
【発明を実施するための形態】
【0018】
上記応答信号種類判別手段(受信情報収集部、位置解析部、受信局位置記録部、信号抽出記録部、モードC信号変換部、モードC信号種類判定部、モードA信号変換部、モードA信号種類判定部、モードA/C情報収集相関更新部)が、上記気圧高度情報の値と上記幾何学的高度情報の値との差分が所定の閾値以下のとき、上記応答信号を上記モードC応答として判定する一方、上記差分が上記閾値を超えるとき、上記応答信号を上記モードA応答として判定する構成とされている航空機位置測定システムを実現する。
【0019】
上記応答信号種類判別手段は、上記各受信局で受信された上記応答信号を上記モードC応答として扱い、該応答信号のビット列を上記気圧高度情報に対応するモードCコードに変換する気圧高度情報変換手段(モードC信号変換部)と、同気圧高度情報変換手段で変換された上記気圧高度情報のモードCコードと上記幾何学的高度情報とを比較し、上記気圧高度情報の値と上記幾何学的高度情報の値との差分が所定の閾値以下のとき、上記応答信号を上記モードC応答として判定するモードC応答判定手段(モードC信号種類判定部)と、上記各受信局で受信された上記応答信号を上記モードA応答として扱い、該応答信号のビット列を上記識別情報に対応するモードAコードに変換する識別情報変換手段(モードA信号変換部)と、同識別情報変換手段で変換された上記モードAコードのうちの上記モードC応答以外のビット列を上記モードA応答として判定するモードA応答判定手段(モードA信号種類判定部)とを備えている。
【0020】
また、上記応答信号種類判別手段は、上記モードC応答判定手段で判定された上記モードC応答、及び上記モードA応答判定手段で判定された上記モードA応答を記録し、次に上記各受信局で受信された上記応答信号と比較して相関度を求め、該相関度が所定値以上の場合、上記モードC応答及びモードA応答の記録を更新する応答記録更新手段(モードA/C情報収集相関更新部)が設けられている。また、上記応答信号種類判別手段は、上記各受信局で受信された上記応答信号を格納する応答信号格納手段(受信情報収集部)を有している。
【実施形態】
【0021】
図1は、この発明の一実施形態である航空機位置測定システムの概略の構成及び同システムが用いられる環境を示す図である。
この形態の航空機位置測定システムは、同図に示すように、受信局21,22,…,25と、データ処理部30と、SSR装置40とから構成されている。SSR装置40は、航空機41の識別情報を要求するためのモードA信号と同航空機41の高度情報を要求するためのモードC信号とを含む質問信号waを同航空機41に向けて発信すると共に、同航空機41のモードA信号に対応するモードA応答及びモードC信号に対応するモードC応答からなる応答信号wbを受信する。受信局21,22,…,25は、たとえば空港などの所定の場所に設置されて設置位置情報が確定し、航空機41のトランスポンダから送信される信号w21,w22,…,w25を受信する。特に、この実施形態では、受信局21,22,…,25は、SSR装置40の質問信号waに対応する航空機41の上記応答信号wbを含む信号を上記信号w21,w22,…,w25として受信する。
【0022】
データ処理部30は、応答信号判別プログラムに基づいて応答信号種類判別手段として機能するコンピュータで構成され、受信情報収集部31と、位置解析部32と、受信局位置記録部33と、信号抽出記録部34と、モードC信号変換部35と、モードC信号種類判定部36と、モードA信号変換部37と、モードA信号種類判定部38と、モードA/C情報収集相関更新部39とから構成されている。受信情報収集部31は、バッファで構成され、各受信局21,22,…,25で受信された信号w21,w22,…,w25を格納する。受信局位置記録部33は、受信局21,22,…,25の各設置位置情報をあらかじめ記録する。位置解析部32は、受信局位置記録部33に記録されている各受信局21,22,…,25の設置位置情報及び同各受信局21,22,…,25で信号w21,w22,…,w25を受信したときの受信時刻の差情報に基づいて、双曲線測位方式により、航空機41の飛行位置情報(緯度情報、経度情報及び幾何学的高度情報)を求める。
【0023】
信号抽出記録部34は、受信情報収集部31に格納された信号w21,w22,…,w25の中からモードAコード及びモードCコードを含む応答信号を抽出して記録する。モードC信号変換部35は、信号抽出記録部34に記録されている応答信号をモードC応答として扱い、同応答信号のビット列を気圧高度情報に対応するモードCコードmcに変換する。モードC信号種類判定部36は、モードC信号変換部35で変換された上記気圧高度情報のモードCコードmcと上記幾何学的高度情報とを比較し、同気圧高度情報の値と同幾何学的高度情報の値との差分が所定の閾値以下のとき、上記応答信号をモードC応答として判定する。
【0024】
モードA信号変換部37は、信号抽出記録部34に記録されている応答信号をモードA応答として扱い、同応答信号のビット列を識別情報に対応するモードAコードmaに変換する。モードA信号種類判定部38は、モードA信号変換部37で変換されたモードAコードmaのうちのモードC応答以外のビット列をモードA応答として判定する。モードA/C情報収集相関更新部39は、モードC信号種類判定部36で判定されたモードC応答、及びモードA信号種類判定部38で判定されたモードA応答を記録し、次に各受信局21,22,…,25で受信された信号w21,w22,…,w25中の応答信号(すなわち、信号抽出記録部34で記録されている応答信号)と比較して相関度を求め、相関度が所定値以上の場合、上記モードC応答及びモードA応答の記録を更新する。
【0025】
図2は、図1の航空機41位置測定システムの動作を示す模式図である。
この図を参照して、この形態の航空機位置測定システムに用いられる応答信号判別方法の処理内容について説明する。
この航空機位置測定システムでは、応答信号格納手段(受信情報収集部31)により、各受信局21,22,…,25で受信された応答信号が格納される(応答信号格納処理)。位置情報処理手段(データ処理部30)では、応答信号種類判別手段(受信情報収集部31、信号抽出記録部34、モードC信号変換部35、モードC信号種類判定部36、モードA信号変換部37、モードA信号種類判定部38)により、各受信局21,22,…,25で受信された応答信号のビット列が気圧高度情報(モードCコード)に変換されると共に、同気圧高度情報と幾何学的高度情報とが比較され、この比較結果に基づいて、上記応答信号がモードA信号に対応するモードA応答か上記モードC信号に対応するモードC応答かが判別される(応答信号種類判別処理)。この応答信号種類判別処理では、気圧高度情報の値と幾何学的高度情報の値との差分が所定の閾値以下のとき、上記応答信号がモードC応答として判定される一方、同差分が同閾値を超えるとき、同応答信号がモードA応答として判定される。
【0026】
この場合、気圧高度情報変換手段(モードC信号変換部35)により、信号抽出記録部34に記録されている応答信号が読み出されて同応答信号がモードC応答として扱われ、同応答信号のビット列が気圧高度情報に対応するモードCコードに変換される(気圧高度情報変換処理)。そして、モードC応答判定手段(モードC信号種類判定部36)により、モードC信号変換部35で変換された気圧高度情報のモードCコードと位置解析部32で求められた幾何学的高度情報とが比較され、同気圧高度情報の値と同幾何学的高度情報の値との差分が所定の閾値以下のとき、上記応答信号がモードC応答として判定される(モードC応答判定処理)。
【0027】
また、識別情報変換手段(モードA信号変換部37)により、信号抽出記録部34に記録されている応答信号が読み出されて同応答信号がモードA応答として扱われ、同応答信号のビット列が識別情報に対応するモードAコードに変換される(識別情報変換処理)。 モードA応答判定手段(モードA信号種類判定部38)により、モードA信号変換部37で変換された上記モードAコードのうちのモードC応答以外のビット列がモードA応答として判定される(モードA応答判定処理)。応答記録更新手段(モードA/C情報収集相関更新部39)により、モードC信号種類判定部36で判定されたモードC応答、及びモードA信号種類判定部38で判定されたモードA応答が記録され、信号抽出記録部34に記録されている応答信号と比較されて相関度が求められ、同相関度が所定値以上の場合、モードC応答及びモードA応答の記録が更新される(応答記録更新処理)。
【0028】
すなわち、図2に示すように、フェーズ[1]では、SSR装置40から、質問信号waとしてモードAの質問信号“A”もしくはモードCの質問信号“C”が、たとえば、“A”,“A”,“C”,“A”,“A”,“C”のパターンで航空機41に送信される。フェーズ[2]では、フェーズ[1]でのSSR装置40の質問信号waに対する航空機41の応答信号が、たとえば、“A”,“A”,“C”,“A”,“A”,“C”のパターンで受信局21,22,…,25で受信される。フェーズ[3]では、応答信号がデータ処理部30中の受信情報収集部31のバッファに格納される。フェーズ[4]では、位置解析部32にて、マルチラテレーション計算(双曲線測位)により、航空機41の位置(緯度、経度、幾何学的高度)が検出される。
【0029】
フェーズ[5a]では、受信情報収集部31のバッファに格納されている応答信号が信号抽出記録部34により抽出され、モードC信号変換部35により同応答信号がモードC応答として扱われ、同応答信号のビット列がモードCコード(気圧高度)に変換される。また、フェーズ[5b]では、信号抽出記録部34により抽出された応答信号がモードA信号変換部37によりモードA応答として扱われ、同応答信号のビット列がモードAコード(8進数)に変換される。フェーズ[6]では、モードC信号種類判定部36により、フェーズ[5a]で算出された気圧高度と、フェーズ[4]のマルチラテレーション計算により取得された幾何学的高度とが比較され、これらの値が近ければ、その応答がモードC応答に特定される。フェーズ[7]では、フェーズ[6]でモードCが特定されたことで、モードA信号種類判定部38により、モードA応答が判明する。
【0030】
以上のように、この実施形態では、データ処理部30により、受信局21,22,…,25で受信される信号w21,w22,…,w25に含まれる応答信号wbがモードA応答なのかモードC応答なのかが判別可能となる。また、データ処理部30は、他の装置、たとえば、既存のSSR装置やRDP(Radar Data Processor、航空路レーダ情報処理システム)などに接続することなく、航空機41の気圧高度情報及び識別情報を取得できる。また、モードA/C情報収集相関更新部39により、記録されているモードC応答及びモードA応答と、次に各受信局21,22,…,25で受信された信号w21,w22,…,w25中の応答信号との相関度が求められ、更新処理が行われるので、より精度の高いモードA/C判定が行われると共に、航空機41の速度の範囲内で、次の位置情報及び高度情報の予測が行われる。また、何らかの原因により受信局21,22,…,25で信号w21,w22,…,w25が受信されなかったり、誤解読された場合には、モードA/C情報収集相関更新部39により、そのデータが明らかに今までの航空機41のものと異なることがわかり、モードA応答/モードC応答の区別精度が高められる。
【0031】
以上、この発明の実施形態を図面により詳述してきたが、具体的な構成は同実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計の変更などがあっても、この発明に含まれる。
たとえば、SSR装置40から航空機41に送信される質問信号wa、及び航空機41の応答信号は、図2中の“A”,“A”,“C”,“A”,“A”,“C”のパターンに限定されない。また、受信局の数は、4つ以上であれば良い。また、図1中のSSR装置40に代えて、他に分散配置されているSSR装置を用いても、上記実施形態とほぼ同様の作用、効果が得られる。
【産業上の利用可能性】
【0032】
この発明は、マルチラテレーションシステムやHMU(Height Monitoring Unit、高度監視装置)など、二次監視レーダ(SSR装置)に直接接続されない航空機位置測定システム全般に適用できる。
【符号の説明】
【0033】
21,22,…,25 受信局
30 データ処理部(位置情報処理手段の一部)
31 受信情報収集部(応答信号種類判別手段の一部、)
32 位置解析部(応答信号種類判別手段の一部)
33 受信局位置記録部(応答信号種類判別手段)
34 信号抽出記録部(応答信号種類判別手段)
35 モードC信号変換部(応答信号種類判別手段の一部、気圧高度情報変換手段)
36 (応答信号種類判別手段の一部、モードC応答判定手段)
37 モードA信号変換部(応答信号種類判別手段の一部、識別情報変換手段)
38 モードA信号種類判定部(応答信号種類判別手段の一部、モードA応答判定手段)
39 モードA/C情報収集相関更新部(応答信号種類判別手段の一部、応答記録更新手段)
40 SSR装置
41 航空機
【特許請求の範囲】
【請求項1】
設置位置情報が確定し、航空機から送信される信号を受信する所定数の受信局と、
前記各受信局の前記設置位置情報及び前記各受信局で前記信号を受信したときの受信時刻の差情報に基づいて、前記航空機の飛行位置情報を求める位置情報処理手段とを備え、前記航空機の飛行位置情報は、緯度情報、経度情報及び幾何学的高度情報からなる航空機位置測定システムであって、
前記航空機の識別情報を要求するためのモードA信号と該航空機の高度情報を要求するためのモードC信号とを含む質問信号を前記航空機に向けて発信する二次監視レーダが設けられ、
前記各受信局は、
前記二次監視レーダの前記質問信号に対応する前記航空機の応答信号を受信する構成とされ、
前記位置情報処理手段は、
前記各受信局で受信された前記応答信号を気圧高度情報に変換すると共に、該気圧高度情報と前記幾何学的高度情報とを比較し、この比較結果に基づいて、前記応答信号が前記モードA信号に対応するモードA応答か前記モードC信号に対応するモードC応答かを判別する応答信号種類判別手段が設けられていることを特徴とする航空機位置測定システム。
【請求項2】
前記応答信号種類判別手段は、
前記気圧高度情報の値と前記幾何学的高度情報の値との差分が所定の閾値以下のとき、前記応答信号を前記モードC応答として判定する一方、前記差分が前記閾値を超えるとき、前記応答信号を前記モードA応答として判定する構成とされていることを特徴とする請求項1記載の航空機位置測定システム。
【請求項3】
前記応答信号種類判別手段は、
前記各受信局で受信された前記応答信号を前記モードC応答として扱い、該応答信号のビット列を前記気圧高度情報に対応するモードCコードに変換する気圧高度情報変換手段と、
該気圧高度情報変換手段で変換された前記気圧高度情報のモードCコードと前記幾何学的高度情報とを比較し、前記気圧高度情報の値と前記幾何学的高度情報の値との差分が所定の閾値以下のとき、前記応答信号を前記モードC応答として判定するモードC応答判定手段と、
前記各受信局で受信された前記応答信号を前記モードA応答として扱い、該応答信号のビット列を前記識別情報に対応するモードAコードに変換する識別情報変換手段と、
該識別情報変換手段で変換された前記モードAコードのうちの前記モードC応答以外のビット列を前記モードA応答として判定するモードA応答判定手段とを備えてなることを特徴とする請求項1又は2記載の航空機位置測定システム。
【請求項4】
前記応答信号種類判別手段は、
前記モードC応答判定手段で判定された前記モードC応答、及び前記モードA応答判定手段で判定された前記モードA応答を記録し、次に前記各受信局で受信された前記応答信号と比較して相関度を求め、該相関度が所定値以上の場合、前記モードC応答及びモードA応答の記録を更新する応答記録更新手段が設けられていることを特徴とする請求項3記載の航空機位置測定システム。
【請求項5】
前記応答信号種類判別手段は、
前記各受信局で受信された前記応答信号を格納する応答信号格納手段を有することを特徴とする請求項1、2、3又は4記載の航空機位置測定システム。
【請求項6】
設置位置情報が確定し、航空機から送信される信号を受信する所定数の受信局と、
前記各受信局の前記設置位置情報及び前記各受信局で前記信号を受信したときの受信時刻の差情報に基づいて、前記航空機の飛行位置情報を求める位置情報処理手段とを備え、前記航空機の飛行位置情報は、緯度情報、経度情報及び幾何学的高度情報からなる航空機位置測定システムに用いられる応答信号判別方法であって、
前記航空機の識別情報を要求するためのモードA信号と該航空機の高度情報を要求するためのモードC信号とを含む質問信号を前記航空機に向けて発信する二次監視レーダが設けられ、
前記各受信局は、
前記二次監視レーダの前記質問信号に対応する前記航空機の応答信号を受信する構成とされ、
前記位置情報処理手段では、
応答信号種類判別手段が、前記各受信局で受信された前記応答信号を気圧高度情報に変換すると共に、該気圧高度情報と前記幾何学的高度情報とを比較し、この比較結果に基づいて、前記応答信号が前記モードA信号に対応するモードA応答か前記モードC信号に対応するモードC応答かを判別する応答信号種類判別処理を行うことを特徴とする応答信号判別方法。
【請求項7】
前記応答信号種類判別処理では、
前記気圧高度情報の値と前記幾何学的高度情報の値との差分が所定の閾値以下のとき、前記応答信号を前記モードC応答として判定する一方、前記差分が前記閾値を超えるとき、前記応答信号を前記モードA応答として判定することを特徴とする請求項6記載の応答信号判別方法。
【請求項8】
前記応答信号種類判別処理では、
気圧高度情報変換手段が、前記各受信局で受信された前記応答信号を前記モードC応答として扱い、該応答信号のビット列を前記気圧高度情報に対応するモードCコードに変換する気圧高度情報変換処理と、
モードC応答判定手段が、前記気圧高度情報変換手段で変換された前記気圧高度情報のモードCコードと前記幾何学的高度情報とを比較し、前記気圧高度情報の値と前記幾何学的高度情報の値との差分が所定の閾値以下のとき、前記応答信号を前記モードC応答として判定するモードC応答判定処理と、
識別情報変換手段が、前記各受信局で受信された前記応答信号を前記モードA応答として扱い、該応答信号のビット列を前記識別情報に対応するモードAコードに変換する識別情報変換処理と、
モードA応答判定手段が、前記識別情報変換手段で変換された前記モードAコードのうちの前記モードC応答以外のビット列を前記モードA応答として判定するモードA応答判定処理とを行うことを特徴とする請求項6又は7記載の応答信号判別方法。
【請求項9】
前記応答信号種類判別処理では、
応答記録更新手段が、前記モードC応答判定手段で判定された前記モードC応答、及び前記モードA応答判定手段で判定された前記モードA応答を記録し、次に前記各受信局で受信された前記応答信号と比較して相関度を求め、該相関度が所定値以上の場合、前記モードC応答及びモードA応答の記録を更新する応答記録更新処理を行うことを特徴とする請求項8記載の応答信号判別方法。
【請求項10】
前記応答信号種類判別処理では、
応答信号格納手段が、前記各受信局で受信された前記応答信号を格納する応答信号格納処理を行うことを特徴とする請求項6、7、8又は9記載の応答信号判別方法。
【請求項11】
コンピュータを、請求項1乃至5のいずれか一に記載の応答信号種類判別手段として機能させることを特徴とする応答信号判別プログラム。
【請求項1】
設置位置情報が確定し、航空機から送信される信号を受信する所定数の受信局と、
前記各受信局の前記設置位置情報及び前記各受信局で前記信号を受信したときの受信時刻の差情報に基づいて、前記航空機の飛行位置情報を求める位置情報処理手段とを備え、前記航空機の飛行位置情報は、緯度情報、経度情報及び幾何学的高度情報からなる航空機位置測定システムであって、
前記航空機の識別情報を要求するためのモードA信号と該航空機の高度情報を要求するためのモードC信号とを含む質問信号を前記航空機に向けて発信する二次監視レーダが設けられ、
前記各受信局は、
前記二次監視レーダの前記質問信号に対応する前記航空機の応答信号を受信する構成とされ、
前記位置情報処理手段は、
前記各受信局で受信された前記応答信号を気圧高度情報に変換すると共に、該気圧高度情報と前記幾何学的高度情報とを比較し、この比較結果に基づいて、前記応答信号が前記モードA信号に対応するモードA応答か前記モードC信号に対応するモードC応答かを判別する応答信号種類判別手段が設けられていることを特徴とする航空機位置測定システム。
【請求項2】
前記応答信号種類判別手段は、
前記気圧高度情報の値と前記幾何学的高度情報の値との差分が所定の閾値以下のとき、前記応答信号を前記モードC応答として判定する一方、前記差分が前記閾値を超えるとき、前記応答信号を前記モードA応答として判定する構成とされていることを特徴とする請求項1記載の航空機位置測定システム。
【請求項3】
前記応答信号種類判別手段は、
前記各受信局で受信された前記応答信号を前記モードC応答として扱い、該応答信号のビット列を前記気圧高度情報に対応するモードCコードに変換する気圧高度情報変換手段と、
該気圧高度情報変換手段で変換された前記気圧高度情報のモードCコードと前記幾何学的高度情報とを比較し、前記気圧高度情報の値と前記幾何学的高度情報の値との差分が所定の閾値以下のとき、前記応答信号を前記モードC応答として判定するモードC応答判定手段と、
前記各受信局で受信された前記応答信号を前記モードA応答として扱い、該応答信号のビット列を前記識別情報に対応するモードAコードに変換する識別情報変換手段と、
該識別情報変換手段で変換された前記モードAコードのうちの前記モードC応答以外のビット列を前記モードA応答として判定するモードA応答判定手段とを備えてなることを特徴とする請求項1又は2記載の航空機位置測定システム。
【請求項4】
前記応答信号種類判別手段は、
前記モードC応答判定手段で判定された前記モードC応答、及び前記モードA応答判定手段で判定された前記モードA応答を記録し、次に前記各受信局で受信された前記応答信号と比較して相関度を求め、該相関度が所定値以上の場合、前記モードC応答及びモードA応答の記録を更新する応答記録更新手段が設けられていることを特徴とする請求項3記載の航空機位置測定システム。
【請求項5】
前記応答信号種類判別手段は、
前記各受信局で受信された前記応答信号を格納する応答信号格納手段を有することを特徴とする請求項1、2、3又は4記載の航空機位置測定システム。
【請求項6】
設置位置情報が確定し、航空機から送信される信号を受信する所定数の受信局と、
前記各受信局の前記設置位置情報及び前記各受信局で前記信号を受信したときの受信時刻の差情報に基づいて、前記航空機の飛行位置情報を求める位置情報処理手段とを備え、前記航空機の飛行位置情報は、緯度情報、経度情報及び幾何学的高度情報からなる航空機位置測定システムに用いられる応答信号判別方法であって、
前記航空機の識別情報を要求するためのモードA信号と該航空機の高度情報を要求するためのモードC信号とを含む質問信号を前記航空機に向けて発信する二次監視レーダが設けられ、
前記各受信局は、
前記二次監視レーダの前記質問信号に対応する前記航空機の応答信号を受信する構成とされ、
前記位置情報処理手段では、
応答信号種類判別手段が、前記各受信局で受信された前記応答信号を気圧高度情報に変換すると共に、該気圧高度情報と前記幾何学的高度情報とを比較し、この比較結果に基づいて、前記応答信号が前記モードA信号に対応するモードA応答か前記モードC信号に対応するモードC応答かを判別する応答信号種類判別処理を行うことを特徴とする応答信号判別方法。
【請求項7】
前記応答信号種類判別処理では、
前記気圧高度情報の値と前記幾何学的高度情報の値との差分が所定の閾値以下のとき、前記応答信号を前記モードC応答として判定する一方、前記差分が前記閾値を超えるとき、前記応答信号を前記モードA応答として判定することを特徴とする請求項6記載の応答信号判別方法。
【請求項8】
前記応答信号種類判別処理では、
気圧高度情報変換手段が、前記各受信局で受信された前記応答信号を前記モードC応答として扱い、該応答信号のビット列を前記気圧高度情報に対応するモードCコードに変換する気圧高度情報変換処理と、
モードC応答判定手段が、前記気圧高度情報変換手段で変換された前記気圧高度情報のモードCコードと前記幾何学的高度情報とを比較し、前記気圧高度情報の値と前記幾何学的高度情報の値との差分が所定の閾値以下のとき、前記応答信号を前記モードC応答として判定するモードC応答判定処理と、
識別情報変換手段が、前記各受信局で受信された前記応答信号を前記モードA応答として扱い、該応答信号のビット列を前記識別情報に対応するモードAコードに変換する識別情報変換処理と、
モードA応答判定手段が、前記識別情報変換手段で変換された前記モードAコードのうちの前記モードC応答以外のビット列を前記モードA応答として判定するモードA応答判定処理とを行うことを特徴とする請求項6又は7記載の応答信号判別方法。
【請求項9】
前記応答信号種類判別処理では、
応答記録更新手段が、前記モードC応答判定手段で判定された前記モードC応答、及び前記モードA応答判定手段で判定された前記モードA応答を記録し、次に前記各受信局で受信された前記応答信号と比較して相関度を求め、該相関度が所定値以上の場合、前記モードC応答及びモードA応答の記録を更新する応答記録更新処理を行うことを特徴とする請求項8記載の応答信号判別方法。
【請求項10】
前記応答信号種類判別処理では、
応答信号格納手段が、前記各受信局で受信された前記応答信号を格納する応答信号格納処理を行うことを特徴とする請求項6、7、8又は9記載の応答信号判別方法。
【請求項11】
コンピュータを、請求項1乃至5のいずれか一に記載の応答信号種類判別手段として機能させることを特徴とする応答信号判別プログラム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2011−112465(P2011−112465A)
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願番号】特願2009−268150(P2009−268150)
【出願日】平成21年11月25日(2009.11.25)
【出願人】(000004237)日本電気株式会社 (19,353)
【Fターム(参考)】
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願日】平成21年11月25日(2009.11.25)
【出願人】(000004237)日本電気株式会社 (19,353)
【Fターム(参考)】
[ Back to top ]