
航空機情報表示装置、航空機情報表示方法、航空機情報表示プログラム
【課題】航空機の飛行状態の確認がしやすく、かつ、ホールディング状態の把握がしやすい航空機情報表示装置を提供する。
【解決手段】当該航空機の位置を表すデータであるセンサデータを取得するセンサデータ取得部と、航空機がホールディング状態から離脱しないエリアである第1のエリアを示す第1の座標情報と、航空機がホールディング状態から離脱可能である第2のエリアを示す第2の座標情報とを記憶するエリア記憶部と、前記航空機がどのエリアに存在するかを表す画像を表示する表示部と、前記センサデータ取得部が取得したセンサデータと、前記エリア記憶部に記憶された第1または第2の座標情報と、に基づいて、前記センサデータが示す航空機の位置が前記第1のエリアにあるか第2のエリアにあるかを判定し、判定した結果に基づいて、前記表示部に表示させる制御部と、を有する。
【解決手段】当該航空機の位置を表すデータであるセンサデータを取得するセンサデータ取得部と、航空機がホールディング状態から離脱しないエリアである第1のエリアを示す第1の座標情報と、航空機がホールディング状態から離脱可能である第2のエリアを示す第2の座標情報とを記憶するエリア記憶部と、前記航空機がどのエリアに存在するかを表す画像を表示する表示部と、前記センサデータ取得部が取得したセンサデータと、前記エリア記憶部に記憶された第1または第2の座標情報と、に基づいて、前記センサデータが示す航空機の位置が前記第1のエリアにあるか第2のエリアにあるかを判定し、判定した結果に基づいて、前記表示部に表示させる制御部と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、航空機のホールディング状態を把握できる航空機情報表示装置、航空機情報表示方法、航空機情報表示プログラムに関する。
【背景技術】
【0002】
航空管制官は、二次元表示のレーダー画面上にいて、ホールディングポイント周辺の航空機の飛行状態を、ターゲットのタグを移動させたり、パイロットと通信を行ったり、電子ストリップに表示されるホールディング状態表示を確認することで、把握している。
ここでいうホールディングポイントとは、例えば空港上空や空港上空のエリアへ進入する手前での混雑やその他の理由で、管制官の指示に従って空中で待機するホールディングを行う地点である。
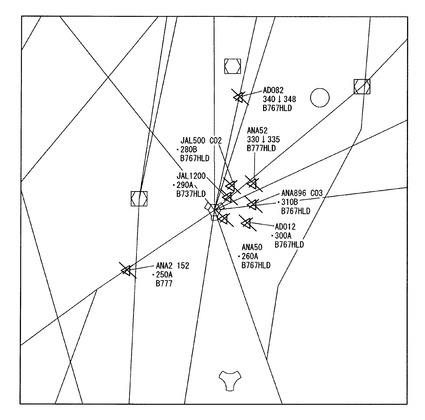
図12は、上述のシステムにおけるレーダー画面の一例を表す図である。この図に示すように、レーダー画面においては、各航空機が飛行している位置が水平方向に対応する二次元の座標上に表示される。この二次元の座標上に表示されたターゲットとなる航空機の位置等に基づいて、航空管制官は、飛行計画を考慮しつつ、航空機のパイロットに対してホールディングをさせたり、ホールディングから離脱するように指示を行う。
【0003】
このような画面表示を行う他にも、航空機の飛行状態を画面上に表示するシステムが提案されている。例えば、航空機の高度や速度を画面上に表示するターミナル管制用管制卓の航空機位置表示装置(特許文献1)や、航空機の飛行位置を表示する画面と航空機の高度と飛行距離との関係を表す画面との両方を表示するレーダー情報表示装置(特許文献2)が提案されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−2955号公報
【特許文献2】特開2008−275375号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述した技術では、航空機の飛行状態を表示するにあたり、飛行位置を水平方向に応じた二次元で表示されているため、ホールディングポイントにおいて、複数の航空機がホールディングしている場合、航空機のタグやターゲットシンボルが重なってしまう場合があり、ターゲットの飛行状態を認識することが困難である。
また、水平方向に応じた二次元の画面で表示すると、航空機の高度を数字で表示することになり、航空機がホールディング可能な高度帯を確認しにくくなってしまう。
また、ホールディングポイントにおける航空機の飛行状態の把握が容易ではなく、最適なホールディング離脱タイミングの把握が困難である。
【0006】
本発明は、このような事情に鑑みてなされたもので、その目的は、航空機の飛行状態の確認がしやすく、かつ、ホールディング状態の把握がしやすい航空機情報表示装置、航空機情報表示方法、航空機情報表示プログラムを提供することにある。
【課題を解決するための手段】
【0007】
上述した課題を解決するために、本発明は、航空機の位置が観測され当該航空機の位置を表すデータであるセンサデータを取得するセンサデータ取得部と、航空機がホールディング状態から離脱しないエリアである第1のエリアを示す第1の座標情報と、航空機がホールディング状態から離脱可能である第2のエリアを示す第2の座標情報とを記憶するエリア記憶部と、前記航空機がどのエリアに存在するかを表す画像を表示する表示部と、前記センサデータ取得部が取得したセンサデータと、前記エリア記憶部に記憶された第1または第2の座標情報と、に基づいて、前記センサデータが示す航空機の位置が前記第1のエリアにあるか第2のエリアにあるかを判定し、判定した結果に基づいて、前記表示部に、前記航空機が前記第1のエリアと前記第2のエリアとのいずれかに存在するかを表示させる制御部と、を有することを特徴とする。
【0008】
また、本発明は、上述の航空機情報表示装置において、前記第1及び第2の座標情報を入力する入力部と、前記入力部から入力される第1及び第2の座標情報を前記エリア記憶部に書き込む書き込み制御部とを有することを特徴とする。
【0009】
また、本発明は、上述の航空機情報表示装置において、前記第2のエリアのうち、ホールディング状態から離脱可能なエリアは、前記航空機の飛行方向に応じて、前記第1のエリアに対して進入するエリアであるインバウンドエリアと第1のエリアから離脱した後のエリアであるアウトバウンドエリアとであり、前記エリア記憶部は、前記第2の座標情報としてインバウンドエリアを表す第3の座標情報とアウトバウンドエリアを表す第4の座標情報とを記憶しており、前記制御部は、前記センサデータ取得部が取得したセンサデータと、前記エリア記憶部に記憶された第1の座標情報と第3の座標情報と第4の座標情報と、に基づいて、前記センサデータが示す航空機の位置がいずれのエリアにあるかを判定し、判定した結果に基づいて、前記表示部に、前記航空機が前記第1のエリアと前記第3のエリアと第4のエリアとのいずれかに存在するかを表示することを特徴とする。
【0010】
また、本発明は、上述の航空機情報表示装置において、前記センサデータには、前記航空機の位置を表すデータとして、水平面上の位置を表す情報と高度を表す情報とが含まれており、前記制御部は、前記センサデータの高度を表す情報基づいて、高度に応じた高さの位置であって、前記センサデータの水平面上の位置を表す情報と前記エリア記憶部に記憶された情報とに基づいて、前記航空機がどのエリアに存在するかを前記表示部に表示することを特徴とする。
【0011】
また、本発明は、センサデータ取得部が、航空機の位置が観測され当該航空機の位置を表すデータであるセンサデータを取得し、制御部が、航空機がホールディング状態から離脱しないエリアである第1のエリアを示す第1の座標情報と、航空機がホールディング状態から離脱可能である第2のエリアを示す第2の座標情報とを記憶するエリア記憶部に記憶された第1または第2の座標情報と、前記センサデータ取得部が取得したセンサデータとに基づいて、前記センサデータが示す航空機の位置が前記第1のエリアにあるか第2のエリアにあるかを判定し、表示部が、前記制御部が判定した結果に基づいて、前記航空機が前記第1のエリアと前記第2のエリアとのいずれかに存在するかを表示することを特徴とする。
【0012】
また、本発明は、コンピュータに、航空機の位置が観測され当該航空機の位置を表すデータであるセンサデータを取得するセンサデータ取得手段、航空機がホールディング状態から離脱しないエリアである第1のエリアを示す第1の座標情報と、航空機がホールディング状態から離脱可能である第2のエリアを示す第2の座標情報とを記憶するエリア記憶部に記憶された第1または第2の座標情報と、前記センサデータ取得手段が取得したセンサデータとに基づいて、前記センサデータが示す航空機の位置が前記第1のエリアにあるか第2のエリアにあるかを判定する制御手段、前記制御手段が判定した結果に基づいて、前記航空機が前記第1のエリアと前記第2のエリアとのいずれかに存在するかを表示する表示手段、として機能させるための航空機情報表示プログラムである。
【発明の効果】
【0013】
本発明によれば、航空機の位置が、ホールディング状態から離脱しないエリアである第1のエリアと、ホールディング状態から離脱可能である第2のエリアとのうち、いずれのエリアにあるかを判定し、判定した結果に基づいて、表示部に、航空機が第1のエリアと第2のエリアとのいずれかに存在するかを表示するようにした。これにより、航空機がホールディング状態にあるか否かを簡単に視認して把握することが可能となる。
【0014】
また、本発明によれば、第2のエリアとして、インバウンドエリアとアウトバウンドエリアとを区別して表示することができるので、ホールディング状態からの離脱の判断が容易になる。
また本発明によれば、航空機の高度に応じた高さの位置であって、航空機がどのエリアに存在するかを表示するようにしたので、既にホールディング状態である航空機の高度と同じ高さにホールディングさせないように、ホールディング状態にある航空機に該当する高度帯に進入機情報として得られた航空機をホールディングさせないように把握することができる。
【図面の簡単な説明】
【0015】
【図1】この発明の一実施形態による航空機情報表示装置の構成を示す概略図である。
【図2】ホールディングパターン情報の一例を表す図である。
【図3】ホールディングターゲット情報の一例を表す図である。
【図4】ホールディングエリアについて説明する図である。
【図5】エントリー方法の判定方法を説明する図である。
【図6】表示部15に表示される画面の一例を表す図である。
【図7】航空機に対して、ホールディングを実施する場合における航空機情報表示装置の動作を説明するフローチャートである。
【図8】航空機がホールディングパターンのいずれのエリアに存在するかを判定する航空機情報表示装置の動作について説明するフローチャートである。
【図9】エントリー方法の判定とホールディングフィックス通過判定をする航空機情報表示装置の動作を説明するフローチャートである。
【図10】インバウンド方位に応じた表示画面の一例を表す図である。
【図11】ホールディングパターンを登録する入力画面の一例を表す図である。
【図12】レーダー画面の一例を表す図である。
【発明を実施するための形態】
【0016】
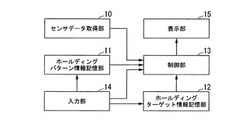
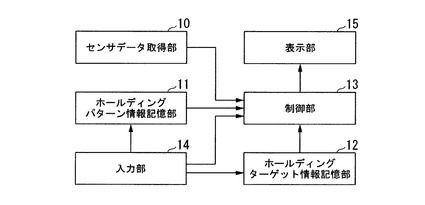
以下、本発明の一実施形態による航空機情報表示装置について図面を参照して説明する。図1は、この発明の一実施形態による航空機情報表示装置の構成を示す概略図である。
センサデータ取得部10は、航空機の位置が観測され当該航空機の位置を表すデータであるセンサデータを取得する。このセンサデータには、航空機の位置を表すデータとして、水平面上の位置を表す情報と高度を表す情報とが含まれている。より具体的にいうと、センサデータは、各種レーダーやマルチテラレーション、ADS−B(Automatic Dependent Surveillance-Broadcast)等で補足される、航空機の位置、速度、高度、加速度の情報である。
【0017】
ホールディングパターン情報記憶部11は、航空機をホールディングさせる条件を表すホールディングパターンを示すホールディングパターン情報を記憶する。このホールディングパターン情報記憶部11は、航空機がホールディング状態から離脱しないエリアである第1のエリアを示す第1の座標情報と、航空機がホールディング状態から離脱可能である第2のエリアを示す第2の座標情報とを記憶する。
この第2のエリアのうち、ホールディング状態から離脱可能なエリアは、航空機の飛行方向に応じて、第1のエリアに対して進入するエリアであるインバウンドエリアと第1のエリアから離脱した後のエリアであるアウトバウンドエリアとから構成されており、エリア記憶部11は、第2の座標情報としてインバウンドエリアを表す第3の座標情報とアウトバウンドエリアを表す第4の座標情報とを記憶する。
【0018】
より具体的に説明すると、ホールディングパターン情報記憶部11は、以下のような情報を記憶する。
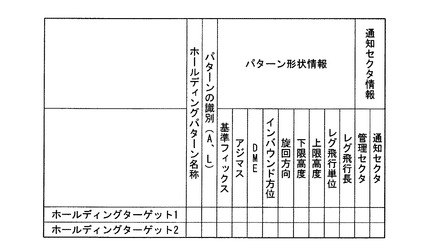
図2は、ホールディングパターン情報の一例を表す図である。ホールディングパターン情報は、ホールディングパターン名称、パターンの識別、パターン形状情報、通知セクタ情報を含む。
ホールディングパターン名称とは、ホールディングパターンに付与された名称である。
パターンの識別とは、ホールディングパターンがタイプAであるかタイプLであるかを表す。タイプAは、Adaptation(事前登録情報)の略号であり、当該ホールディングパターンが事前に登録されているものであることを表す。タイプAのホールディングパターンは、登録内容を変更することができない情報である。
タイプLは、Localの略号であり、管制卓から運用中に登録されたホールディングパターンを表す。ただし、ホールディングパターンには、どのセクタが情報を変更する権限を有する管理セクタであるのか、情報を参照するだけの権限しかない通知セクタであるのかが登録できるようになっており、登録内容の変更や削除は管理セクタだけに許可されている。
【0019】
パターン形状情報は、ホールディングパターンを表す情報であり、基準フィックス、アジマス、DME、インバウンド方位、旋回方向、下限高度、上限高度、レグ飛行単位、レグ飛行長、を含む情報である。
基準フィックスの項目には、無線航行援助施設である基準フィックスの識別情報が含まれる。
アジマスとは、基準フィックスを中心として、基準方位(例えば北方向)とホールディングフィックスとの角度を表す。
DMEには、ホールディングフィックスの識別情報が含まれる。
インバウンド方位には、航空機がホールディングフィックスに進入する角度の情報が含まれる。
旋回方向とは、ホールディングパターンにおいて航空機が旋回する方向を示す情報が含まれる。
下限高度とは、ホールディング状態における航空機の下限となる高度を表す。
上限高度とは、ホールディング状態における航空機の上限となる高度を表す。
レグ飛行単位とは、レグ飛行長の単位を表す。
レグ飛行長とは、ホールディング状態における飛行経路上の略直線経路の距離を表す。
【0020】
通知セクタ情報は、管理セクタであるか、通知セクタであるかを表す情報である。
【0021】
ホールディングターゲット情報記憶部12は、ホールディング状態にある航空機がどのホールディングのエリアに存在するかを表す情報である。
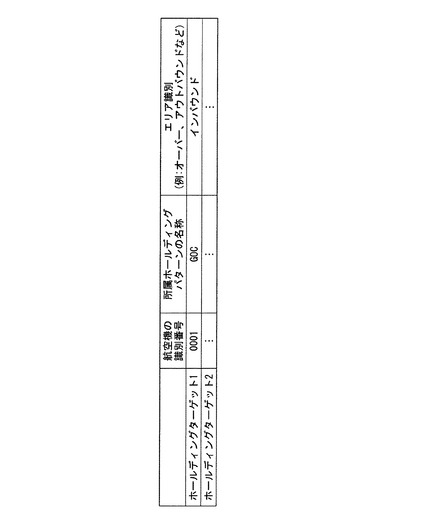
図3は、ホールディングターゲット情報の一例を表す図である。
ホールディングターゲットとは、ホールディング状態にある航空機を表す。
このホールディングターゲット情報は、ホールディング状態にある航空機の識別番号と、所属ホールディングパターンの名称と、エリア識別とが、ホールディングターゲット毎に対応付けられた情報である。
所属ホールディングパターンとは、ホールディング状態にある航空機がどのホールディングパターンに従ってホールディングされたかを表す情報である。
エリア識別は、ホールディング状態にある航空機が、オーバー、インバウンド、アウトバウンド、のどれに属する状態であるかを表す。ここでは、ホールディング状態にない航空機については、ホールディング状態に移行するホールディング開始指示がなされたか否かを表す情報、ホールディング開始指示がなされているが、ホールディング状態にまだ移行していないことを表す情報が記憶される場合がある。
【0022】
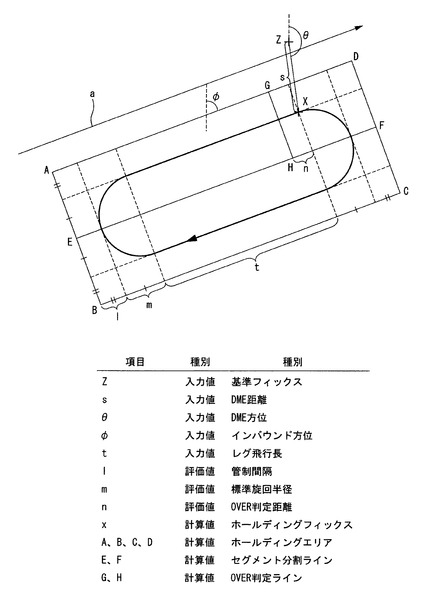
ここでホールディングエリアについてさらに説明する。
図4は、ホールディングエリアについて説明する図である。この図において、Zは無線航行援助施設である基準フィックスの位置を表す座標である。sは、基準フィックスとホールディングフィックスとの距離である(DME(Distance Measuring Equipment)距離と呼ぶ)。ホールディングフィックスとは、無線航行援助施設とは異なる位置であり、あるホールディングパターンにおけるホールディングを行わせる基準となる位置を表す。
θは、基準フィックスから北方向の方位とホールディングフィックスとの角度であるDME方位である。
【0023】
φは、基準方位(例えば、北方向)とホールディングパターンのインバウンドレグとのなす角である。
tは、ホールディングパターンの飛行経路上の略直線経路の飛行長を表すレグ飛行長である。このレグ飛行長は、例えば、平均飛行速度で飛行した場合に、所定の時間(例えば、2分、3分など)で航空機が移動する距離である。
lは、管制間隔であり、計器飛行する航空機同士の衝突を防止するために規定されている間隔である。管制官は、航空機同士がこの間隔を維持するように管制を行う。また、ここでは、ホールディングパターンと航空路の間において、十分な安全間隔が確保されるために必要な距離を表す。
mは、ホールディングパターンの飛行経路上において、旋回する場合における標準的な半径を表す標準旋回半径である。
【0024】
nはオーバー判定距離であり、航空機がどのホールディングエリアに存在するかを判定する場合に、インバウンドからオーバーエリアに切り替わるタイミングを判定するための距離である。ここでは、ホールディングフィックスとインバウンドエリアとのうち、インバウンドエリアの略直線の航空路の一部がオーバーエリアに含まれる距離に該当する。
このオーバー判定距離は、管制官が予めシステムの評価を行った時点で入力値が決定され、もしくは運用中に登録した場合には、その時点で入力値が決定されるものであり、管制官が設定したいオーバーエリアに応じて、入力値が異なる。例えば、オーバー判定距離を長くすると、オーバーエリアが広くなり、その分インバウンドエリアが狭くなり、ホールディング状態から離脱できる領域が狭くなり、オーバー判定距離を短くすると、オーバーエリアが狭くなり、その分インバウンド領域が広くなり、ホールディング状態から離脱できる領域が広くなる。このように、ホールディング状態を離脱させるか否かを設定する領域の広さに応じて設定可能である。
【0025】
Xは、ホールディングフィックスの位置を表す座標である。
A、B、C、Dは、ホールディングエリアを表す座標であり、この座標によって囲まれた領域内がホールディングエリアである。
A、E、H、Gは、インバウンドエリアを表す座標であり、この座標によって囲まれた領域内がインバウンドエリアである。このインバウンドエリア内を飛行している航空機にホールディングから離脱する指示であるホールディング離脱指示を行った場合、当該指示を受けた航空機は、ホールディングフィックス通過後にホールディング状態から離脱し、ホールディングエリア外に飛行する。
【0026】
E、B、C、Fは、アウトバウンドエリアを表す座標であり、この座標によって囲まれた領域内がアウトバウンドエリアである。このアウトバウンドエリア内を飛行している航空機にホールディング離脱指示を行った場合、この指示を受けた航空機は、ただちにホールディングフィックスに向かい、ホールディングフィックスを通過した後に、ホールディング状態から離脱する。
G、H、F、Dは、オーバーエリアを表す座標であり、この座標によって囲まれた領域内がオーバーエリアである。このオーバーエリアは、オーバー判定位置からホールディングフィックス側の領域であり、ホールディングフィックス近傍を航空機が飛行しているか否かの判定を行うためのエリアである。
【0027】
E、Fはセグメント分割ラインであり、オーバーエリアとインバウンドエリアとを含むエリアと、アウトバウンドエリアと、を分割するラインを示す。
G、Hは、オーバー判定ラインを表す。このオーバー判定ラインは、オーバー判定距離に応じて決まる。
aは、ホールディング状態ではない航空機が、基準フィックス近傍を通過する場合の航空路を表しており、この矢印の向きに航空機が飛行することを表す。ここでは、ホールディングパターンとしては、ホールディングフィックスを基準として航空機が右旋回する場合が示されている。
【0028】
表示部15は、航空機がどのエリアに存在するかを表す画像を表示するディスプレイである。このディスプレイは、例えば、液晶表示装置やCRT(Cathde Ray Tube)である。
【0029】
制御部13は、センサデータ取得部10が取得したセンサデータと、エリア記憶部11に記憶された第1または第2の座標情報と、に基づいて、センサデータが示す航空機の位置が第1のエリアにあるか第2のエリアにあるかを判定し、判定した結果に基づいて、表示部15に、航空機が第1のエリアと第2のエリアとのいずれかに存在するかを表示させる。
また、制御部13は、センサデータ取得部10が取得したセンサデータと、エリア記憶部11に記憶された第1の座標情報と第3の座標情報と第4の座標情報と、に基づいて、センサデータが示す航空機の位置が、第1のエリアと第3のエリアと第4のエリアとのいずれのエリアにあるかを判定し、判定した結果に基づいて、表示部15に、航空機が第1のエリアと前記第3のエリアと第4のエリアとのいずれかに存在するかを表示する。
また、制御部13は、センサデータに高度を表す情報が含まれている場合には、この高度を表す情報に基づいて、高度に応じた高さの位置に、航空機がどのエリアに存在するかを表示部15に表示する。
また、制御部13は、入力部14から入力される第1及び第2の座標情報をホールディングパターン情報記憶部11に書き込む。
【0030】
入力部14は、第1及び第2の座標情報を入力する機能と、管制指示を入力する機能とを有する。この入力部14は、例えば、キーボードやマウス等の入力デバイスである。管制指示とは、航空機に対する指示であり、例えば、ホールディング状態に移行することを指示するホールディング開始指示、ホールディング状態から離脱する指示であるホールディング解除指示とがある。
【0031】
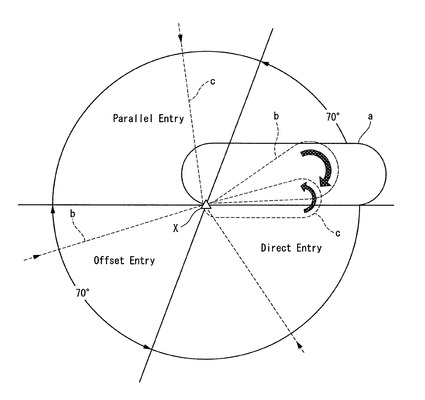
図5は、エントリー方法の判定方法を説明する図である。
ここでは、ホールディングフィックスの座標位置Xと、ホールディングパターン(符号a)が示されている。このホールディングパターンに従ってホールディング状態に移行する場合、ホールディングフィックスにアプローチする方法には幾つかのパターンがあり、ホールディングフィックスに対する進入角度に応じて、エントリーの方法が異なる。
このエントリーには、ホールディングフィックスにアプローチして通り過ぎたのち、インバウンドエリア側から再度ホールディングフィックスにアプローチしてホールディングパターンに移行するパラレルエントリー(符号c)、ホールディングフィックスにアプローチして通り過ぎた後、インバウンドエリア側からアウトバウンドエリア側を通過して再度ホールディングフィックスにアプローチしてホールディングパターンに移行するオフセットエントリー(符号b)、ホールディングフィックスにアプローチした後にホールディングパターンに従って飛行することが可能なダイレクトエントリーがある。
【0032】
ここでは、ホールディングフィックスへの進入角度に応じて、エントリー方法の種別が決まる。例えば、エントリー方式毎に、ホールディングフィックスに対する進入角度の範囲を対応付けて記憶領域に記憶しておき、制御部が、その記憶された情報と、航空機の進入角度とに基づいて、どのエントリー方式に該当するかを判定し、判定結果を表示部15に表示する。
【0033】
次に、図4において説明したホールディングエリアに関し、各座標の算出について説明する。ここでは、基準フィックスの座標Zを(x,y)とする。
ホールディングフィックスの座標Xを(p,q)とすると、p、qは、以下の式で表される。
p=x+s×sinθ・・・・(1)
q=y+s×cosθ・・・・(2)
【0034】
座標Aを(ax,ay)とすると、ax、ayは、以下の式で表される。
《右旋回の場合》
ax=p−(l+m+t)×sinφ−l×cosφ・・・・(3)
ay=q−(l+m+t)×cosφ+l×sinφ・・・・(4)
《左旋回の場合》
ax=p−(l+m+t)×sinφ+l×cosφ・・・・(5)
ay=q−(l+m+t)×cosφ−l×sinφ・・・・(6)
【0035】
座標Eを(ex,ey)とすると、ex、eyは、以下の式で表される。
《右旋回の場合》
ex=ax+(l+m)×cosφ・・・・(7)
ey=ay−(l+m)×sinφ・・・・(8)
《左旋回の場合》
ex=ax−(l+m)×cosφ・・・・(9)
ey=ay+(l+m)×sinφ・・・・(10)
【0036】
座標Bを(bx,by)とすると、bx、byは、以下の式で表される。
《右旋回の場合》
bx=ax+2×(l+m)×cosφ・・・・(11)
by=ay−2×(l+m)×sinφ・・・・(12)
《左旋回の場合》
bx=ax−2×(l+m)×cosφ・・・・(13)
by=ay+2×(l+m)×sinφ・・・・(14)
【0037】
座標Cを(cx,cy)とすると、cx、cyは、以下の式で表される。
cx=bx+{2×(l+m)+t}×sinφ・・・・(15)
cy=by+{2×(l+m)+t}×cosφ・・・・(16)
【0038】
座標Fを(fx,fy)とすると、fx、fyは、以下の式で表される。
fx=ex+{2×(l+m)+t}×sinφ・・・・(17)
fy=ey+{2×(l+m)+t}×cosφ・・・・(18)
【0039】
座標Dを(dx,dy)とすると、dx、dyは、以下の式で表される。
dx=ax+{2×(l+m)+t}×sinφ・・・・(19)
dy=ay+{2×(l+m)+t}×cosφ・・・・(20)
【0040】
座標Gを(gx,gy)とすると、gx、gyは、以下の式で表される。
gx=dx−(l+m+n)×sinφ・・・・(21)
gy=dy−(l+m+n)×cosφ・・・・(22)
【0041】
座標Hを(hx,hy)とすると、hx、hyは、以下の式で表される。
hx=fx−(l+m+n)×sinφ・・・・(23)
hy=fy−(l+m+n)×cosφ・・・・(24)
【0042】
ホールディングフィックス、DME距離、インバウンド方位、旋回方向、ホールディング距離またはホールディング時間が決まると、これらの値と、上述の式(1)〜式(24)に従って、制御部13が各座標を求めることができる。
【0043】
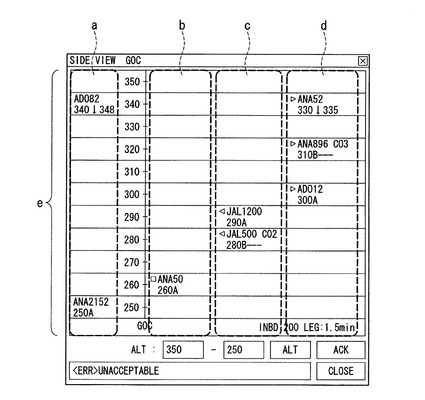
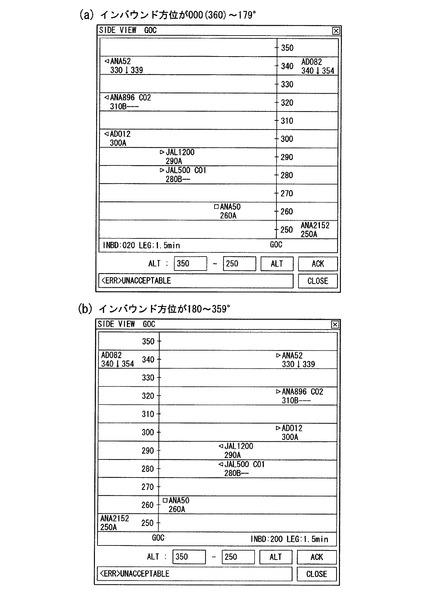
図6は、表示部15に表示される画面の一例を表す図である。
この図において、縦軸は高度を表し、横軸は、ホールディング状態を表す。符号aに示す領域は、ホールディングパターン近傍を通過する航空機を進入機情報として表示する領域である。この進入機情報は、ホールディング状態に移行する予定の航空機や、ホールディングパターンを通過する航空機を進入する所定の時間前(例えば、5分)の航空機を対象とし、その航空機の名称と高度、下降しているか上昇しているかを表す情報、ターゲットシンボルを表す情報が含まれる。ターゲットシンボルとは、管制卓の表示画面上に表示される航空機の位置を示す図形(マーク)であり、ここでは、例えば、△の図形で表示される。
【0044】
符号bに示す領域は、オーバーエリア内に存在する航空機のホールディングターゲット情報を表示する領域である。ホールディングターゲット情報には、その航空機の名称と高度、下降しているか上昇しているかを表す情報、ホールディングターゲットを表す情報が含まれる。
符号cに示す領域は、インバウンドエリア内に存在する航空機のホールディングターゲット情報を表示する領域である。
符号dに示す領域は、アウトバウンドエリア内に存在する航空機のホールディングターゲット情報を表示する領域である。
これらの進入機情報やホールディングターゲット情報は、符号eに示す高度に対応する縦軸上であって、符号a〜dの何れかの領域に表示される。
【0045】
ここでは、進入機情報を高度に応じた位置にターゲットシンボルで表示するようにしたので、既にホールディング状態である航空機の高度と同じ高さにホールディングさせないように、ホールディング状態にある航空機に該当する高度帯に進入機情報として得られた航空機をホールディングさせないように把握することができる。
【0046】
このようにして、高度とホールディング状態(オーバーエリア、インバウンドエリア、アウトバウンドエリア)またはホールディングフィックスを5分以内に通過する状態に対応するグラフの位置にターゲットシンボルが表示される。
【0047】
ここでは、一例として、ADO82の名称の航空機に対してホールディング指示が入力され、ホールディングフィックスまで5分以内に到着するホールディング予定機であることが表示されている。
また、高度帯FL340には、ホールディング予定機(ADO82)が存在しているため、符号aの領域内に表示されている。
ANA52の名称の航空機は、高度帯FL335であり、高度帯FL330へ降下指示されていることが、符号dの領域内に表示されている。
ANA896の名称の航空機は、高度帯FL320を飛行中にFL310へ降下指示されたが、コースト状態となっている。ここでは、コーストが3回目であることが「C03」として表示されている。
JAL500の名称の航空機は、ANA896と同様の状態であるが、コーストが2回目であることが表示されている。
ANA2152の名称の航空機は、ホールディング対象機ではなく、当該ホールディングフィックスを5分以内に通過予定であることが表示されている。
【0048】
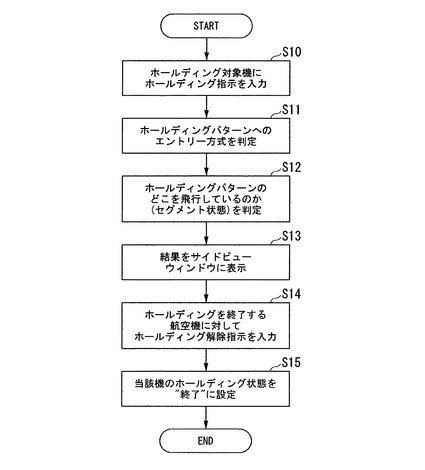
次に、上述した構成における航空機情報表示装置の動作について、説明する。図7は、航空機に対して、ホールディングを実施する場合における航空機情報表示装置の動作を説明するフローチャートである。ここでは、飛行中の各航空機の飛行状態を観測し、センサデータが順次、航空機情報表示装置に送信されている。
航空機情報表示装置1のセンサデータ取得部10は、センサデータを順次取得する。制御部13は、得られたセンサデータを元に各航空機の現在位置を割り出すとともに、順次得られるセンサデータに基づく現在位置の履歴から、飛行方向を検出し、ホールディングパターンへのエントリー方式を判定する(ステップS10)。そして、判定結果をホールディング対象機の名称に対応付けて表示部15の画面の一部に表示する。
【0049】
次に、制御部13は、航空機の現在位置の座標と、記憶部11に記憶されたホールディングパターンの座標とに基づいて、ホールディング対象の各航空機が、ホールディングパターンのどのエリアに存在するかを判定する(ステップS12)。そして、制御部13は、判定結果に応じたエリアに対応した画面(サイドビューウィンドウ)上の表示領域に航空機のターゲットシンボルを、センサデータに含まれる高度に応じてそれぞれ表示する(ステップS13)。
【0050】
管制官は、この画面上に表示されたホールディングを終了する対象機があるか否かを判断し、ホールディングを終了する航空機に対してホールディング解除指示を入力部14を介して入力する。この航空機のパイロットには、管制官が、この入力部14への指示とともに無線等を介して伝えるようにしてもよいし、入力部14への入力に基づいて、航空機情報表示装置から、無線装置を通じて、その旨の通知をするようにしてもよい。
【0051】
ホールディング解除指示が入力されると、制御部13は、ホールディング状態のステータスを「終了」に書き換える(ステップS15)。
【0052】
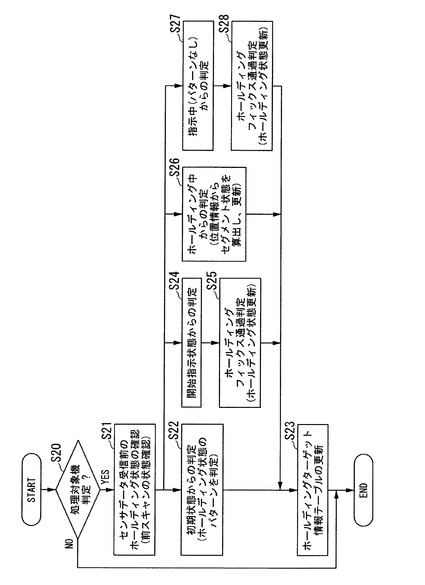
図8は、航空機がホールディングパターンのいずれのエリアに存在するかを判定する航空機情報表示装置の動作について説明するフローチャートである。
制御部13は、一つの航空機のセンサデータをセンサデータ取得部10によって取得すると、センサデータに含まれる航空機の位置に基づいて、処理対象機であるか否かを判定する(ステップS20)。この判定は、ホールディングエリア内に所定の時間内に進入する可能性があるか否か、およびホールディングエリア内であるか否かに基づいて判定される。制御部13は、ホールディングエリア内に所定の時間内に進入する可能性がある場合、または、ホールディングエリア内であると判定された場合について、処理対象機であると判定する。ホールディングエリア内に所定の時間内に進入する可能性があるか否かについては、センサデータが示す航空機の位置と速度、加速度、現在位置の履歴に応じて得られる進行方向に基づいて判定される。
処理対象機ではないと判定した場合、処理を終了し、他の航空機のセンサデータを対象としてステップS20から処理を行う。
【0053】
一方、処理対象機であると判定した場合、制御部13は、処理対象として判定された航空機の今回のセンサデータを取得する前における当該航空機のホールディングターゲット情報記憶部12から読み出し、前回のセンサデータが得られた時点におけるホールディング状態がどのホールディング状態であるかを判定する(ステップS21)。
前回のホールディング状態が初期状態すなわちホールディング状態ではない場合、今回えられたセンサデータの座標とホールディングパターンの座標とに基づいて、ホールディング状態を判定する(ステップS22)。ここでは、ホールディング状態ではない(ホールディングのエリアに進入していない)、オーバーエリア、インバウンドエリア、アウトバウンドエリアのいずれであるかが判定される。
【0054】
判定されると、制御部13は、判定結果をホールディングターゲット情報記憶部12に履歴として書き込んで更新する(ステップS23)。
【0055】
ステップS21において、ホールディングターゲット情報がホールディングの開始指示を受けていることを表す情報を含む場合(ステップS24)、制御部13は、ホールディングフィックスの座標上を通過したか否かを判定する(ステップS25)。この判定は、航空機の現在位置を示す座標がホールディングフィックスの座標上から所定の範囲内にあるか否かを判定してもよい。そして、制御部13は、判定結果をホールディングターゲット情報としてホールディングターゲット情報記憶部12に記憶する(ステップS23)。
【0056】
ステップS21において、制御部13は、ホールディングターゲット情報がホールディング中であることを表す情報を含む場合(ステップS26)、今回得られたセンサデータが表す航空機の位置から、現在所属するホールディングエリアがどこであるかを判定し、判定結果をホールディングターゲット情報としてホールディングターゲット情報記憶部12に記憶する(ステップS23)。
【0057】
一方、ステップS21において、制御部13は、ホールディングターゲット情報が、ホールディング開始指示を受けている航空機であって、ホールディング状態にまだ遷移していないことを示している場合(ステップS27)、ホールディングフィックスの座標上を通過したか否かを判定する(ステップS28)。この判定は、上述したように、航空機の現在位置を示す座標がホールディングフィックスの座標上から所定の範囲内にあるか否かを判定してもよい。そして、制御部13は、判定結果をホールディングターゲット情報としてホールディングターゲット情報記憶部12に記憶する(ステップS23)。
【0058】
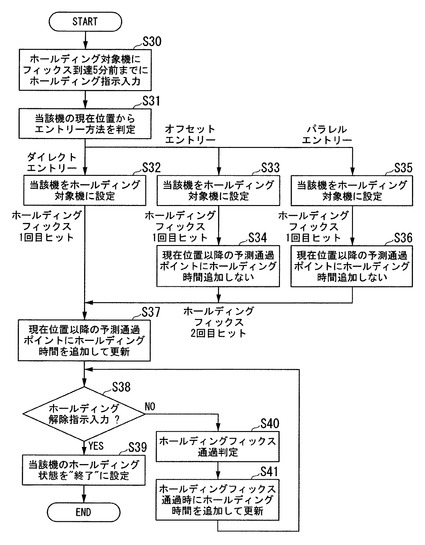
図9は、エントリー方法の判定とホールディングフィックス通過判定をする航空機情報表示装置の動作を説明するフローチャートである。
まず、制御部13は、ホールディング対象機にホールディングフィックスに到達する所定の時間前までに(例えば5分前までに)、ホールディング開始指示の入力を入力部14から入力されると、ホールディング開始指示を受けた航空機のセンサデータに含まれる現在位置に基づいて、エントリー方式を判定する(ステップS31)。
エントリー方式が、ダイレクトエントリーであることを判定すると、制御部13は、当該航空機をホールディング対象機であると設定(ホールディングターゲット情報に書き込み)する(ステップS32)。そして、ホールディングフィックスを1回目のヒット(通過)をすると、現在位置以降の予測通過ポイントにホールディング時間をホールディングターゲット情報として追加して更新する(ステップS37)。ここでは、センサデータの履歴を参照することにより、センサデータが検出された時刻とその時の航空機の位置の履歴をもとに、予測通過位置とその通過時刻を算出し、これを予測のホールディングターゲット情報として記憶する。
【0059】
一方、エントリー方式がオフセットエントリーであると判定されると、制御部13は、当該航空機をホールディング対象機に設定する(ステップS33)。そして、ホールディングフィックスの1回目ヒットをすると、現在位置以降の予測通過ポイントにホールディング時間を追加せず(ステップS34)、2回目のホールディングフィックスヒットを待つ。そして、ホールディングフィックスの2回目ヒットをすると、現在位置以降の予測通過ポイントにホールディング時間を追加して更新する(ステップS37)。
【0060】
他方、エントリー方式がパラレルエントリーであると判定されると、当該航空機をホールディング対象機に設定し(ステップS35)、ホールディングフィックスの1回目ヒットをすると、現在位置以降の予測通過ポイントにホールディング時間を追加せず(ステップS36)、2回目のホールディングフィックスヒットを待つ。そして、ホールディングフィックスの2回目ヒットをすると、現在位置以降の予測通過ポイントにホールディング時間を追加して更新する(ステップS37)。
【0061】
ステップS37の後、制御部13は、入力部14からホールディング解除指示が入力されたか否かを判定する(ステップS38)。ホールディング解除指示が入力されていない場合、制御部13は、センサデータを順次得て航空機の現在位置に応じて、ホールディングフィックスを通過したか否かを判定し、通過したことが判定されると(ステップS40)、ホールディングフィックス通過時にホールディング時間をホールディングターゲット情報に追加して更新する(ステップS41)。
【0062】
一方、ステップS38において、ホールディング解除指示が入力されたことが判定されると、当該航空機のホールディングターゲット情報のホールディング状態を終了に書き換えて、処理を終了する。
【0063】
図10は、インバウンド方位に応じた表示画面の一例を表す図である。この図において(a)は、インバウンド方位が0°(360°)から179°の範囲における表示画面の一例を表す図である。ここでは、進入機情報を表す領域が画面の右側に配置され、オーバーエリア、インバウンドエリア、アウトバウンドエリアが画面の左側に配置されて表示される。また、この図において、(b)は、インバウンド方位が180°から359°の範囲における表示画面の一例を表す図である。ここでは、進入機情報を表す領域が画面の左側に配置され、オーバーエリア、インバウンドエリア、アウトバウンドエリアが画面の右側に配置されて表示される。
【0064】
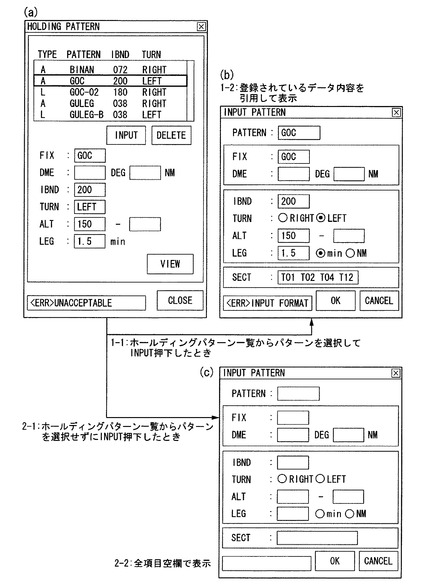
図11は、ホールディングパターンを登録する入力画面の一例を表す図である。この図において、(a)では、既に記憶されているホールディングパターンが、タイプを表す「TYPE」とホールディングパターンを表す「PATTERN」と、インバウンド方位の角度を表す「IBND」と、旋回方向を表す「TURN」とが対応付けられて画面情報に表示される。また、この図の(a)では、新たに登録するホールディングパターンの各入力項目が表示されており、この入力項目の入力領域に、必要なデータを入力部14を介して入力することが可能である。
ここでは、ホールディングフィックスの識別情報を示す「FIX」、基準フィックスを基準としてホールディングフィックスの方位を示す「DME」とその距離を表す「NM」、インバウンド方位を表す「IBND」、旋回方向を表す「TURN」、表示領域の上限と下限の範囲を示す「ALT」、ホールディング時間またはホールディング距離を示す「LEG」(ここでは、minを選択すると時間、NMを選択すると距離)の、入力項目が表示されている。
なお、この図の(b)においては、既に登録されたホールディングパターンを選択した状態において「INPUT」をクリックすると、この既に登録されたホールディングパターンのデータが引用されて表示され、これにより、新たなホールディングパターンを登録しやすくなっている。また、この図の(c)においては、既に登録されたホールディングパターンを選択しない状態で「INPUT」をクリックした場合には、各入力項目にデータが引用されない状態で入力画面が表示される。これら入力画面において、それぞれのデータを入力した状態において「OK」ボタンがクリックされると、新たなホールディングパターンが登録される。
このようにして、運用中であっても、新たなホールディングパターンを管制官等が登録することができる。
【0065】
そして、上述の入力画面に従って、ホールディングパターンのデータが入力されると、これら入力された値と、上述の式(1)〜式(24)に従って、制御部13がホールディングパターンを表す各座標を求める。求められた各座標は、ホールディングパターン情報としてホールディングパターン情報記憶部11に書き込まれる。
【0066】
また、図1における入力部14、制御部13の機能を実現するためのプログラムをコンピュータ読み取り可能な記録媒体に記録して、この記録媒体に記録されたプログラムをコンピュータシステムに読み込ませ、実行することにより航空機情報表示の制御を行ってもよい。なお、ここでいう「コンピュータシステム」とは、OSや周辺機器等のハードウェアを含むものとする。
【0067】
また、「コンピュータシステム」は、WWWシステムを利用している場合であれば、ホームページ提供環境(あるいは表示環境)も含むものとする。
また、「コンピュータ読み取り可能な記録媒体」とは、フレキシブルディスク、光磁気ディスク、ROM、CD−ROM等の可搬媒体、コンピュータシステムに内蔵されるハードディスク等の記憶装置のことをいう。さらに「コンピュータ読み取り可能な記録媒体」とは、インターネット等のネットワークや電話回線等の通信回線を介してプログラムを送信する場合の通信線のように、短時間の間、動的にプログラムを保持するもの、その場合のサーバやクライアントとなるコンピュータシステム内部の揮発性メモリのように、一定時間プログラムを保持しているものも含むものとする。また上記プログラムは、前述した機能の一部を実現するためのものであっても良く、さらに前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるものであってもよい。
【0068】
以上、この発明の実施形態について図面を参照して詳述してきたが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計等も含まれる。
【符号の説明】
【0069】
10 センサデータ取得部
11 ホールディングパターン情報記憶部
12 ホールディングターゲット情報記憶部
13 制御部
14 入力部
15 表示部
【技術分野】
【0001】
本発明は、航空機のホールディング状態を把握できる航空機情報表示装置、航空機情報表示方法、航空機情報表示プログラムに関する。
【背景技術】
【0002】
航空管制官は、二次元表示のレーダー画面上にいて、ホールディングポイント周辺の航空機の飛行状態を、ターゲットのタグを移動させたり、パイロットと通信を行ったり、電子ストリップに表示されるホールディング状態表示を確認することで、把握している。
ここでいうホールディングポイントとは、例えば空港上空や空港上空のエリアへ進入する手前での混雑やその他の理由で、管制官の指示に従って空中で待機するホールディングを行う地点である。
図12は、上述のシステムにおけるレーダー画面の一例を表す図である。この図に示すように、レーダー画面においては、各航空機が飛行している位置が水平方向に対応する二次元の座標上に表示される。この二次元の座標上に表示されたターゲットとなる航空機の位置等に基づいて、航空管制官は、飛行計画を考慮しつつ、航空機のパイロットに対してホールディングをさせたり、ホールディングから離脱するように指示を行う。
【0003】
このような画面表示を行う他にも、航空機の飛行状態を画面上に表示するシステムが提案されている。例えば、航空機の高度や速度を画面上に表示するターミナル管制用管制卓の航空機位置表示装置(特許文献1)や、航空機の飛行位置を表示する画面と航空機の高度と飛行距離との関係を表す画面との両方を表示するレーダー情報表示装置(特許文献2)が提案されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−2955号公報
【特許文献2】特開2008−275375号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述した技術では、航空機の飛行状態を表示するにあたり、飛行位置を水平方向に応じた二次元で表示されているため、ホールディングポイントにおいて、複数の航空機がホールディングしている場合、航空機のタグやターゲットシンボルが重なってしまう場合があり、ターゲットの飛行状態を認識することが困難である。
また、水平方向に応じた二次元の画面で表示すると、航空機の高度を数字で表示することになり、航空機がホールディング可能な高度帯を確認しにくくなってしまう。
また、ホールディングポイントにおける航空機の飛行状態の把握が容易ではなく、最適なホールディング離脱タイミングの把握が困難である。
【0006】
本発明は、このような事情に鑑みてなされたもので、その目的は、航空機の飛行状態の確認がしやすく、かつ、ホールディング状態の把握がしやすい航空機情報表示装置、航空機情報表示方法、航空機情報表示プログラムを提供することにある。
【課題を解決するための手段】
【0007】
上述した課題を解決するために、本発明は、航空機の位置が観測され当該航空機の位置を表すデータであるセンサデータを取得するセンサデータ取得部と、航空機がホールディング状態から離脱しないエリアである第1のエリアを示す第1の座標情報と、航空機がホールディング状態から離脱可能である第2のエリアを示す第2の座標情報とを記憶するエリア記憶部と、前記航空機がどのエリアに存在するかを表す画像を表示する表示部と、前記センサデータ取得部が取得したセンサデータと、前記エリア記憶部に記憶された第1または第2の座標情報と、に基づいて、前記センサデータが示す航空機の位置が前記第1のエリアにあるか第2のエリアにあるかを判定し、判定した結果に基づいて、前記表示部に、前記航空機が前記第1のエリアと前記第2のエリアとのいずれかに存在するかを表示させる制御部と、を有することを特徴とする。
【0008】
また、本発明は、上述の航空機情報表示装置において、前記第1及び第2の座標情報を入力する入力部と、前記入力部から入力される第1及び第2の座標情報を前記エリア記憶部に書き込む書き込み制御部とを有することを特徴とする。
【0009】
また、本発明は、上述の航空機情報表示装置において、前記第2のエリアのうち、ホールディング状態から離脱可能なエリアは、前記航空機の飛行方向に応じて、前記第1のエリアに対して進入するエリアであるインバウンドエリアと第1のエリアから離脱した後のエリアであるアウトバウンドエリアとであり、前記エリア記憶部は、前記第2の座標情報としてインバウンドエリアを表す第3の座標情報とアウトバウンドエリアを表す第4の座標情報とを記憶しており、前記制御部は、前記センサデータ取得部が取得したセンサデータと、前記エリア記憶部に記憶された第1の座標情報と第3の座標情報と第4の座標情報と、に基づいて、前記センサデータが示す航空機の位置がいずれのエリアにあるかを判定し、判定した結果に基づいて、前記表示部に、前記航空機が前記第1のエリアと前記第3のエリアと第4のエリアとのいずれかに存在するかを表示することを特徴とする。
【0010】
また、本発明は、上述の航空機情報表示装置において、前記センサデータには、前記航空機の位置を表すデータとして、水平面上の位置を表す情報と高度を表す情報とが含まれており、前記制御部は、前記センサデータの高度を表す情報基づいて、高度に応じた高さの位置であって、前記センサデータの水平面上の位置を表す情報と前記エリア記憶部に記憶された情報とに基づいて、前記航空機がどのエリアに存在するかを前記表示部に表示することを特徴とする。
【0011】
また、本発明は、センサデータ取得部が、航空機の位置が観測され当該航空機の位置を表すデータであるセンサデータを取得し、制御部が、航空機がホールディング状態から離脱しないエリアである第1のエリアを示す第1の座標情報と、航空機がホールディング状態から離脱可能である第2のエリアを示す第2の座標情報とを記憶するエリア記憶部に記憶された第1または第2の座標情報と、前記センサデータ取得部が取得したセンサデータとに基づいて、前記センサデータが示す航空機の位置が前記第1のエリアにあるか第2のエリアにあるかを判定し、表示部が、前記制御部が判定した結果に基づいて、前記航空機が前記第1のエリアと前記第2のエリアとのいずれかに存在するかを表示することを特徴とする。
【0012】
また、本発明は、コンピュータに、航空機の位置が観測され当該航空機の位置を表すデータであるセンサデータを取得するセンサデータ取得手段、航空機がホールディング状態から離脱しないエリアである第1のエリアを示す第1の座標情報と、航空機がホールディング状態から離脱可能である第2のエリアを示す第2の座標情報とを記憶するエリア記憶部に記憶された第1または第2の座標情報と、前記センサデータ取得手段が取得したセンサデータとに基づいて、前記センサデータが示す航空機の位置が前記第1のエリアにあるか第2のエリアにあるかを判定する制御手段、前記制御手段が判定した結果に基づいて、前記航空機が前記第1のエリアと前記第2のエリアとのいずれかに存在するかを表示する表示手段、として機能させるための航空機情報表示プログラムである。
【発明の効果】
【0013】
本発明によれば、航空機の位置が、ホールディング状態から離脱しないエリアである第1のエリアと、ホールディング状態から離脱可能である第2のエリアとのうち、いずれのエリアにあるかを判定し、判定した結果に基づいて、表示部に、航空機が第1のエリアと第2のエリアとのいずれかに存在するかを表示するようにした。これにより、航空機がホールディング状態にあるか否かを簡単に視認して把握することが可能となる。
【0014】
また、本発明によれば、第2のエリアとして、インバウンドエリアとアウトバウンドエリアとを区別して表示することができるので、ホールディング状態からの離脱の判断が容易になる。
また本発明によれば、航空機の高度に応じた高さの位置であって、航空機がどのエリアに存在するかを表示するようにしたので、既にホールディング状態である航空機の高度と同じ高さにホールディングさせないように、ホールディング状態にある航空機に該当する高度帯に進入機情報として得られた航空機をホールディングさせないように把握することができる。
【図面の簡単な説明】
【0015】
【図1】この発明の一実施形態による航空機情報表示装置の構成を示す概略図である。
【図2】ホールディングパターン情報の一例を表す図である。
【図3】ホールディングターゲット情報の一例を表す図である。
【図4】ホールディングエリアについて説明する図である。
【図5】エントリー方法の判定方法を説明する図である。
【図6】表示部15に表示される画面の一例を表す図である。
【図7】航空機に対して、ホールディングを実施する場合における航空機情報表示装置の動作を説明するフローチャートである。
【図8】航空機がホールディングパターンのいずれのエリアに存在するかを判定する航空機情報表示装置の動作について説明するフローチャートである。
【図9】エントリー方法の判定とホールディングフィックス通過判定をする航空機情報表示装置の動作を説明するフローチャートである。
【図10】インバウンド方位に応じた表示画面の一例を表す図である。
【図11】ホールディングパターンを登録する入力画面の一例を表す図である。
【図12】レーダー画面の一例を表す図である。
【発明を実施するための形態】
【0016】
以下、本発明の一実施形態による航空機情報表示装置について図面を参照して説明する。図1は、この発明の一実施形態による航空機情報表示装置の構成を示す概略図である。
センサデータ取得部10は、航空機の位置が観測され当該航空機の位置を表すデータであるセンサデータを取得する。このセンサデータには、航空機の位置を表すデータとして、水平面上の位置を表す情報と高度を表す情報とが含まれている。より具体的にいうと、センサデータは、各種レーダーやマルチテラレーション、ADS−B(Automatic Dependent Surveillance-Broadcast)等で補足される、航空機の位置、速度、高度、加速度の情報である。
【0017】
ホールディングパターン情報記憶部11は、航空機をホールディングさせる条件を表すホールディングパターンを示すホールディングパターン情報を記憶する。このホールディングパターン情報記憶部11は、航空機がホールディング状態から離脱しないエリアである第1のエリアを示す第1の座標情報と、航空機がホールディング状態から離脱可能である第2のエリアを示す第2の座標情報とを記憶する。
この第2のエリアのうち、ホールディング状態から離脱可能なエリアは、航空機の飛行方向に応じて、第1のエリアに対して進入するエリアであるインバウンドエリアと第1のエリアから離脱した後のエリアであるアウトバウンドエリアとから構成されており、エリア記憶部11は、第2の座標情報としてインバウンドエリアを表す第3の座標情報とアウトバウンドエリアを表す第4の座標情報とを記憶する。
【0018】
より具体的に説明すると、ホールディングパターン情報記憶部11は、以下のような情報を記憶する。
図2は、ホールディングパターン情報の一例を表す図である。ホールディングパターン情報は、ホールディングパターン名称、パターンの識別、パターン形状情報、通知セクタ情報を含む。
ホールディングパターン名称とは、ホールディングパターンに付与された名称である。
パターンの識別とは、ホールディングパターンがタイプAであるかタイプLであるかを表す。タイプAは、Adaptation(事前登録情報)の略号であり、当該ホールディングパターンが事前に登録されているものであることを表す。タイプAのホールディングパターンは、登録内容を変更することができない情報である。
タイプLは、Localの略号であり、管制卓から運用中に登録されたホールディングパターンを表す。ただし、ホールディングパターンには、どのセクタが情報を変更する権限を有する管理セクタであるのか、情報を参照するだけの権限しかない通知セクタであるのかが登録できるようになっており、登録内容の変更や削除は管理セクタだけに許可されている。
【0019】
パターン形状情報は、ホールディングパターンを表す情報であり、基準フィックス、アジマス、DME、インバウンド方位、旋回方向、下限高度、上限高度、レグ飛行単位、レグ飛行長、を含む情報である。
基準フィックスの項目には、無線航行援助施設である基準フィックスの識別情報が含まれる。
アジマスとは、基準フィックスを中心として、基準方位(例えば北方向)とホールディングフィックスとの角度を表す。
DMEには、ホールディングフィックスの識別情報が含まれる。
インバウンド方位には、航空機がホールディングフィックスに進入する角度の情報が含まれる。
旋回方向とは、ホールディングパターンにおいて航空機が旋回する方向を示す情報が含まれる。
下限高度とは、ホールディング状態における航空機の下限となる高度を表す。
上限高度とは、ホールディング状態における航空機の上限となる高度を表す。
レグ飛行単位とは、レグ飛行長の単位を表す。
レグ飛行長とは、ホールディング状態における飛行経路上の略直線経路の距離を表す。
【0020】
通知セクタ情報は、管理セクタであるか、通知セクタであるかを表す情報である。
【0021】
ホールディングターゲット情報記憶部12は、ホールディング状態にある航空機がどのホールディングのエリアに存在するかを表す情報である。
図3は、ホールディングターゲット情報の一例を表す図である。
ホールディングターゲットとは、ホールディング状態にある航空機を表す。
このホールディングターゲット情報は、ホールディング状態にある航空機の識別番号と、所属ホールディングパターンの名称と、エリア識別とが、ホールディングターゲット毎に対応付けられた情報である。
所属ホールディングパターンとは、ホールディング状態にある航空機がどのホールディングパターンに従ってホールディングされたかを表す情報である。
エリア識別は、ホールディング状態にある航空機が、オーバー、インバウンド、アウトバウンド、のどれに属する状態であるかを表す。ここでは、ホールディング状態にない航空機については、ホールディング状態に移行するホールディング開始指示がなされたか否かを表す情報、ホールディング開始指示がなされているが、ホールディング状態にまだ移行していないことを表す情報が記憶される場合がある。
【0022】
ここでホールディングエリアについてさらに説明する。
図4は、ホールディングエリアについて説明する図である。この図において、Zは無線航行援助施設である基準フィックスの位置を表す座標である。sは、基準フィックスとホールディングフィックスとの距離である(DME(Distance Measuring Equipment)距離と呼ぶ)。ホールディングフィックスとは、無線航行援助施設とは異なる位置であり、あるホールディングパターンにおけるホールディングを行わせる基準となる位置を表す。
θは、基準フィックスから北方向の方位とホールディングフィックスとの角度であるDME方位である。
【0023】
φは、基準方位(例えば、北方向)とホールディングパターンのインバウンドレグとのなす角である。
tは、ホールディングパターンの飛行経路上の略直線経路の飛行長を表すレグ飛行長である。このレグ飛行長は、例えば、平均飛行速度で飛行した場合に、所定の時間(例えば、2分、3分など)で航空機が移動する距離である。
lは、管制間隔であり、計器飛行する航空機同士の衝突を防止するために規定されている間隔である。管制官は、航空機同士がこの間隔を維持するように管制を行う。また、ここでは、ホールディングパターンと航空路の間において、十分な安全間隔が確保されるために必要な距離を表す。
mは、ホールディングパターンの飛行経路上において、旋回する場合における標準的な半径を表す標準旋回半径である。
【0024】
nはオーバー判定距離であり、航空機がどのホールディングエリアに存在するかを判定する場合に、インバウンドからオーバーエリアに切り替わるタイミングを判定するための距離である。ここでは、ホールディングフィックスとインバウンドエリアとのうち、インバウンドエリアの略直線の航空路の一部がオーバーエリアに含まれる距離に該当する。
このオーバー判定距離は、管制官が予めシステムの評価を行った時点で入力値が決定され、もしくは運用中に登録した場合には、その時点で入力値が決定されるものであり、管制官が設定したいオーバーエリアに応じて、入力値が異なる。例えば、オーバー判定距離を長くすると、オーバーエリアが広くなり、その分インバウンドエリアが狭くなり、ホールディング状態から離脱できる領域が狭くなり、オーバー判定距離を短くすると、オーバーエリアが狭くなり、その分インバウンド領域が広くなり、ホールディング状態から離脱できる領域が広くなる。このように、ホールディング状態を離脱させるか否かを設定する領域の広さに応じて設定可能である。
【0025】
Xは、ホールディングフィックスの位置を表す座標である。
A、B、C、Dは、ホールディングエリアを表す座標であり、この座標によって囲まれた領域内がホールディングエリアである。
A、E、H、Gは、インバウンドエリアを表す座標であり、この座標によって囲まれた領域内がインバウンドエリアである。このインバウンドエリア内を飛行している航空機にホールディングから離脱する指示であるホールディング離脱指示を行った場合、当該指示を受けた航空機は、ホールディングフィックス通過後にホールディング状態から離脱し、ホールディングエリア外に飛行する。
【0026】
E、B、C、Fは、アウトバウンドエリアを表す座標であり、この座標によって囲まれた領域内がアウトバウンドエリアである。このアウトバウンドエリア内を飛行している航空機にホールディング離脱指示を行った場合、この指示を受けた航空機は、ただちにホールディングフィックスに向かい、ホールディングフィックスを通過した後に、ホールディング状態から離脱する。
G、H、F、Dは、オーバーエリアを表す座標であり、この座標によって囲まれた領域内がオーバーエリアである。このオーバーエリアは、オーバー判定位置からホールディングフィックス側の領域であり、ホールディングフィックス近傍を航空機が飛行しているか否かの判定を行うためのエリアである。
【0027】
E、Fはセグメント分割ラインであり、オーバーエリアとインバウンドエリアとを含むエリアと、アウトバウンドエリアと、を分割するラインを示す。
G、Hは、オーバー判定ラインを表す。このオーバー判定ラインは、オーバー判定距離に応じて決まる。
aは、ホールディング状態ではない航空機が、基準フィックス近傍を通過する場合の航空路を表しており、この矢印の向きに航空機が飛行することを表す。ここでは、ホールディングパターンとしては、ホールディングフィックスを基準として航空機が右旋回する場合が示されている。
【0028】
表示部15は、航空機がどのエリアに存在するかを表す画像を表示するディスプレイである。このディスプレイは、例えば、液晶表示装置やCRT(Cathde Ray Tube)である。
【0029】
制御部13は、センサデータ取得部10が取得したセンサデータと、エリア記憶部11に記憶された第1または第2の座標情報と、に基づいて、センサデータが示す航空機の位置が第1のエリアにあるか第2のエリアにあるかを判定し、判定した結果に基づいて、表示部15に、航空機が第1のエリアと第2のエリアとのいずれかに存在するかを表示させる。
また、制御部13は、センサデータ取得部10が取得したセンサデータと、エリア記憶部11に記憶された第1の座標情報と第3の座標情報と第4の座標情報と、に基づいて、センサデータが示す航空機の位置が、第1のエリアと第3のエリアと第4のエリアとのいずれのエリアにあるかを判定し、判定した結果に基づいて、表示部15に、航空機が第1のエリアと前記第3のエリアと第4のエリアとのいずれかに存在するかを表示する。
また、制御部13は、センサデータに高度を表す情報が含まれている場合には、この高度を表す情報に基づいて、高度に応じた高さの位置に、航空機がどのエリアに存在するかを表示部15に表示する。
また、制御部13は、入力部14から入力される第1及び第2の座標情報をホールディングパターン情報記憶部11に書き込む。
【0030】
入力部14は、第1及び第2の座標情報を入力する機能と、管制指示を入力する機能とを有する。この入力部14は、例えば、キーボードやマウス等の入力デバイスである。管制指示とは、航空機に対する指示であり、例えば、ホールディング状態に移行することを指示するホールディング開始指示、ホールディング状態から離脱する指示であるホールディング解除指示とがある。
【0031】
図5は、エントリー方法の判定方法を説明する図である。
ここでは、ホールディングフィックスの座標位置Xと、ホールディングパターン(符号a)が示されている。このホールディングパターンに従ってホールディング状態に移行する場合、ホールディングフィックスにアプローチする方法には幾つかのパターンがあり、ホールディングフィックスに対する進入角度に応じて、エントリーの方法が異なる。
このエントリーには、ホールディングフィックスにアプローチして通り過ぎたのち、インバウンドエリア側から再度ホールディングフィックスにアプローチしてホールディングパターンに移行するパラレルエントリー(符号c)、ホールディングフィックスにアプローチして通り過ぎた後、インバウンドエリア側からアウトバウンドエリア側を通過して再度ホールディングフィックスにアプローチしてホールディングパターンに移行するオフセットエントリー(符号b)、ホールディングフィックスにアプローチした後にホールディングパターンに従って飛行することが可能なダイレクトエントリーがある。
【0032】
ここでは、ホールディングフィックスへの進入角度に応じて、エントリー方法の種別が決まる。例えば、エントリー方式毎に、ホールディングフィックスに対する進入角度の範囲を対応付けて記憶領域に記憶しておき、制御部が、その記憶された情報と、航空機の進入角度とに基づいて、どのエントリー方式に該当するかを判定し、判定結果を表示部15に表示する。
【0033】
次に、図4において説明したホールディングエリアに関し、各座標の算出について説明する。ここでは、基準フィックスの座標Zを(x,y)とする。
ホールディングフィックスの座標Xを(p,q)とすると、p、qは、以下の式で表される。
p=x+s×sinθ・・・・(1)
q=y+s×cosθ・・・・(2)
【0034】
座標Aを(ax,ay)とすると、ax、ayは、以下の式で表される。
《右旋回の場合》
ax=p−(l+m+t)×sinφ−l×cosφ・・・・(3)
ay=q−(l+m+t)×cosφ+l×sinφ・・・・(4)
《左旋回の場合》
ax=p−(l+m+t)×sinφ+l×cosφ・・・・(5)
ay=q−(l+m+t)×cosφ−l×sinφ・・・・(6)
【0035】
座標Eを(ex,ey)とすると、ex、eyは、以下の式で表される。
《右旋回の場合》
ex=ax+(l+m)×cosφ・・・・(7)
ey=ay−(l+m)×sinφ・・・・(8)
《左旋回の場合》
ex=ax−(l+m)×cosφ・・・・(9)
ey=ay+(l+m)×sinφ・・・・(10)
【0036】
座標Bを(bx,by)とすると、bx、byは、以下の式で表される。
《右旋回の場合》
bx=ax+2×(l+m)×cosφ・・・・(11)
by=ay−2×(l+m)×sinφ・・・・(12)
《左旋回の場合》
bx=ax−2×(l+m)×cosφ・・・・(13)
by=ay+2×(l+m)×sinφ・・・・(14)
【0037】
座標Cを(cx,cy)とすると、cx、cyは、以下の式で表される。
cx=bx+{2×(l+m)+t}×sinφ・・・・(15)
cy=by+{2×(l+m)+t}×cosφ・・・・(16)
【0038】
座標Fを(fx,fy)とすると、fx、fyは、以下の式で表される。
fx=ex+{2×(l+m)+t}×sinφ・・・・(17)
fy=ey+{2×(l+m)+t}×cosφ・・・・(18)
【0039】
座標Dを(dx,dy)とすると、dx、dyは、以下の式で表される。
dx=ax+{2×(l+m)+t}×sinφ・・・・(19)
dy=ay+{2×(l+m)+t}×cosφ・・・・(20)
【0040】
座標Gを(gx,gy)とすると、gx、gyは、以下の式で表される。
gx=dx−(l+m+n)×sinφ・・・・(21)
gy=dy−(l+m+n)×cosφ・・・・(22)
【0041】
座標Hを(hx,hy)とすると、hx、hyは、以下の式で表される。
hx=fx−(l+m+n)×sinφ・・・・(23)
hy=fy−(l+m+n)×cosφ・・・・(24)
【0042】
ホールディングフィックス、DME距離、インバウンド方位、旋回方向、ホールディング距離またはホールディング時間が決まると、これらの値と、上述の式(1)〜式(24)に従って、制御部13が各座標を求めることができる。
【0043】
図6は、表示部15に表示される画面の一例を表す図である。
この図において、縦軸は高度を表し、横軸は、ホールディング状態を表す。符号aに示す領域は、ホールディングパターン近傍を通過する航空機を進入機情報として表示する領域である。この進入機情報は、ホールディング状態に移行する予定の航空機や、ホールディングパターンを通過する航空機を進入する所定の時間前(例えば、5分)の航空機を対象とし、その航空機の名称と高度、下降しているか上昇しているかを表す情報、ターゲットシンボルを表す情報が含まれる。ターゲットシンボルとは、管制卓の表示画面上に表示される航空機の位置を示す図形(マーク)であり、ここでは、例えば、△の図形で表示される。
【0044】
符号bに示す領域は、オーバーエリア内に存在する航空機のホールディングターゲット情報を表示する領域である。ホールディングターゲット情報には、その航空機の名称と高度、下降しているか上昇しているかを表す情報、ホールディングターゲットを表す情報が含まれる。
符号cに示す領域は、インバウンドエリア内に存在する航空機のホールディングターゲット情報を表示する領域である。
符号dに示す領域は、アウトバウンドエリア内に存在する航空機のホールディングターゲット情報を表示する領域である。
これらの進入機情報やホールディングターゲット情報は、符号eに示す高度に対応する縦軸上であって、符号a〜dの何れかの領域に表示される。
【0045】
ここでは、進入機情報を高度に応じた位置にターゲットシンボルで表示するようにしたので、既にホールディング状態である航空機の高度と同じ高さにホールディングさせないように、ホールディング状態にある航空機に該当する高度帯に進入機情報として得られた航空機をホールディングさせないように把握することができる。
【0046】
このようにして、高度とホールディング状態(オーバーエリア、インバウンドエリア、アウトバウンドエリア)またはホールディングフィックスを5分以内に通過する状態に対応するグラフの位置にターゲットシンボルが表示される。
【0047】
ここでは、一例として、ADO82の名称の航空機に対してホールディング指示が入力され、ホールディングフィックスまで5分以内に到着するホールディング予定機であることが表示されている。
また、高度帯FL340には、ホールディング予定機(ADO82)が存在しているため、符号aの領域内に表示されている。
ANA52の名称の航空機は、高度帯FL335であり、高度帯FL330へ降下指示されていることが、符号dの領域内に表示されている。
ANA896の名称の航空機は、高度帯FL320を飛行中にFL310へ降下指示されたが、コースト状態となっている。ここでは、コーストが3回目であることが「C03」として表示されている。
JAL500の名称の航空機は、ANA896と同様の状態であるが、コーストが2回目であることが表示されている。
ANA2152の名称の航空機は、ホールディング対象機ではなく、当該ホールディングフィックスを5分以内に通過予定であることが表示されている。
【0048】
次に、上述した構成における航空機情報表示装置の動作について、説明する。図7は、航空機に対して、ホールディングを実施する場合における航空機情報表示装置の動作を説明するフローチャートである。ここでは、飛行中の各航空機の飛行状態を観測し、センサデータが順次、航空機情報表示装置に送信されている。
航空機情報表示装置1のセンサデータ取得部10は、センサデータを順次取得する。制御部13は、得られたセンサデータを元に各航空機の現在位置を割り出すとともに、順次得られるセンサデータに基づく現在位置の履歴から、飛行方向を検出し、ホールディングパターンへのエントリー方式を判定する(ステップS10)。そして、判定結果をホールディング対象機の名称に対応付けて表示部15の画面の一部に表示する。
【0049】
次に、制御部13は、航空機の現在位置の座標と、記憶部11に記憶されたホールディングパターンの座標とに基づいて、ホールディング対象の各航空機が、ホールディングパターンのどのエリアに存在するかを判定する(ステップS12)。そして、制御部13は、判定結果に応じたエリアに対応した画面(サイドビューウィンドウ)上の表示領域に航空機のターゲットシンボルを、センサデータに含まれる高度に応じてそれぞれ表示する(ステップS13)。
【0050】
管制官は、この画面上に表示されたホールディングを終了する対象機があるか否かを判断し、ホールディングを終了する航空機に対してホールディング解除指示を入力部14を介して入力する。この航空機のパイロットには、管制官が、この入力部14への指示とともに無線等を介して伝えるようにしてもよいし、入力部14への入力に基づいて、航空機情報表示装置から、無線装置を通じて、その旨の通知をするようにしてもよい。
【0051】
ホールディング解除指示が入力されると、制御部13は、ホールディング状態のステータスを「終了」に書き換える(ステップS15)。
【0052】
図8は、航空機がホールディングパターンのいずれのエリアに存在するかを判定する航空機情報表示装置の動作について説明するフローチャートである。
制御部13は、一つの航空機のセンサデータをセンサデータ取得部10によって取得すると、センサデータに含まれる航空機の位置に基づいて、処理対象機であるか否かを判定する(ステップS20)。この判定は、ホールディングエリア内に所定の時間内に進入する可能性があるか否か、およびホールディングエリア内であるか否かに基づいて判定される。制御部13は、ホールディングエリア内に所定の時間内に進入する可能性がある場合、または、ホールディングエリア内であると判定された場合について、処理対象機であると判定する。ホールディングエリア内に所定の時間内に進入する可能性があるか否かについては、センサデータが示す航空機の位置と速度、加速度、現在位置の履歴に応じて得られる進行方向に基づいて判定される。
処理対象機ではないと判定した場合、処理を終了し、他の航空機のセンサデータを対象としてステップS20から処理を行う。
【0053】
一方、処理対象機であると判定した場合、制御部13は、処理対象として判定された航空機の今回のセンサデータを取得する前における当該航空機のホールディングターゲット情報記憶部12から読み出し、前回のセンサデータが得られた時点におけるホールディング状態がどのホールディング状態であるかを判定する(ステップS21)。
前回のホールディング状態が初期状態すなわちホールディング状態ではない場合、今回えられたセンサデータの座標とホールディングパターンの座標とに基づいて、ホールディング状態を判定する(ステップS22)。ここでは、ホールディング状態ではない(ホールディングのエリアに進入していない)、オーバーエリア、インバウンドエリア、アウトバウンドエリアのいずれであるかが判定される。
【0054】
判定されると、制御部13は、判定結果をホールディングターゲット情報記憶部12に履歴として書き込んで更新する(ステップS23)。
【0055】
ステップS21において、ホールディングターゲット情報がホールディングの開始指示を受けていることを表す情報を含む場合(ステップS24)、制御部13は、ホールディングフィックスの座標上を通過したか否かを判定する(ステップS25)。この判定は、航空機の現在位置を示す座標がホールディングフィックスの座標上から所定の範囲内にあるか否かを判定してもよい。そして、制御部13は、判定結果をホールディングターゲット情報としてホールディングターゲット情報記憶部12に記憶する(ステップS23)。
【0056】
ステップS21において、制御部13は、ホールディングターゲット情報がホールディング中であることを表す情報を含む場合(ステップS26)、今回得られたセンサデータが表す航空機の位置から、現在所属するホールディングエリアがどこであるかを判定し、判定結果をホールディングターゲット情報としてホールディングターゲット情報記憶部12に記憶する(ステップS23)。
【0057】
一方、ステップS21において、制御部13は、ホールディングターゲット情報が、ホールディング開始指示を受けている航空機であって、ホールディング状態にまだ遷移していないことを示している場合(ステップS27)、ホールディングフィックスの座標上を通過したか否かを判定する(ステップS28)。この判定は、上述したように、航空機の現在位置を示す座標がホールディングフィックスの座標上から所定の範囲内にあるか否かを判定してもよい。そして、制御部13は、判定結果をホールディングターゲット情報としてホールディングターゲット情報記憶部12に記憶する(ステップS23)。
【0058】
図9は、エントリー方法の判定とホールディングフィックス通過判定をする航空機情報表示装置の動作を説明するフローチャートである。
まず、制御部13は、ホールディング対象機にホールディングフィックスに到達する所定の時間前までに(例えば5分前までに)、ホールディング開始指示の入力を入力部14から入力されると、ホールディング開始指示を受けた航空機のセンサデータに含まれる現在位置に基づいて、エントリー方式を判定する(ステップS31)。
エントリー方式が、ダイレクトエントリーであることを判定すると、制御部13は、当該航空機をホールディング対象機であると設定(ホールディングターゲット情報に書き込み)する(ステップS32)。そして、ホールディングフィックスを1回目のヒット(通過)をすると、現在位置以降の予測通過ポイントにホールディング時間をホールディングターゲット情報として追加して更新する(ステップS37)。ここでは、センサデータの履歴を参照することにより、センサデータが検出された時刻とその時の航空機の位置の履歴をもとに、予測通過位置とその通過時刻を算出し、これを予測のホールディングターゲット情報として記憶する。
【0059】
一方、エントリー方式がオフセットエントリーであると判定されると、制御部13は、当該航空機をホールディング対象機に設定する(ステップS33)。そして、ホールディングフィックスの1回目ヒットをすると、現在位置以降の予測通過ポイントにホールディング時間を追加せず(ステップS34)、2回目のホールディングフィックスヒットを待つ。そして、ホールディングフィックスの2回目ヒットをすると、現在位置以降の予測通過ポイントにホールディング時間を追加して更新する(ステップS37)。
【0060】
他方、エントリー方式がパラレルエントリーであると判定されると、当該航空機をホールディング対象機に設定し(ステップS35)、ホールディングフィックスの1回目ヒットをすると、現在位置以降の予測通過ポイントにホールディング時間を追加せず(ステップS36)、2回目のホールディングフィックスヒットを待つ。そして、ホールディングフィックスの2回目ヒットをすると、現在位置以降の予測通過ポイントにホールディング時間を追加して更新する(ステップS37)。
【0061】
ステップS37の後、制御部13は、入力部14からホールディング解除指示が入力されたか否かを判定する(ステップS38)。ホールディング解除指示が入力されていない場合、制御部13は、センサデータを順次得て航空機の現在位置に応じて、ホールディングフィックスを通過したか否かを判定し、通過したことが判定されると(ステップS40)、ホールディングフィックス通過時にホールディング時間をホールディングターゲット情報に追加して更新する(ステップS41)。
【0062】
一方、ステップS38において、ホールディング解除指示が入力されたことが判定されると、当該航空機のホールディングターゲット情報のホールディング状態を終了に書き換えて、処理を終了する。
【0063】
図10は、インバウンド方位に応じた表示画面の一例を表す図である。この図において(a)は、インバウンド方位が0°(360°)から179°の範囲における表示画面の一例を表す図である。ここでは、進入機情報を表す領域が画面の右側に配置され、オーバーエリア、インバウンドエリア、アウトバウンドエリアが画面の左側に配置されて表示される。また、この図において、(b)は、インバウンド方位が180°から359°の範囲における表示画面の一例を表す図である。ここでは、進入機情報を表す領域が画面の左側に配置され、オーバーエリア、インバウンドエリア、アウトバウンドエリアが画面の右側に配置されて表示される。
【0064】
図11は、ホールディングパターンを登録する入力画面の一例を表す図である。この図において、(a)では、既に記憶されているホールディングパターンが、タイプを表す「TYPE」とホールディングパターンを表す「PATTERN」と、インバウンド方位の角度を表す「IBND」と、旋回方向を表す「TURN」とが対応付けられて画面情報に表示される。また、この図の(a)では、新たに登録するホールディングパターンの各入力項目が表示されており、この入力項目の入力領域に、必要なデータを入力部14を介して入力することが可能である。
ここでは、ホールディングフィックスの識別情報を示す「FIX」、基準フィックスを基準としてホールディングフィックスの方位を示す「DME」とその距離を表す「NM」、インバウンド方位を表す「IBND」、旋回方向を表す「TURN」、表示領域の上限と下限の範囲を示す「ALT」、ホールディング時間またはホールディング距離を示す「LEG」(ここでは、minを選択すると時間、NMを選択すると距離)の、入力項目が表示されている。
なお、この図の(b)においては、既に登録されたホールディングパターンを選択した状態において「INPUT」をクリックすると、この既に登録されたホールディングパターンのデータが引用されて表示され、これにより、新たなホールディングパターンを登録しやすくなっている。また、この図の(c)においては、既に登録されたホールディングパターンを選択しない状態で「INPUT」をクリックした場合には、各入力項目にデータが引用されない状態で入力画面が表示される。これら入力画面において、それぞれのデータを入力した状態において「OK」ボタンがクリックされると、新たなホールディングパターンが登録される。
このようにして、運用中であっても、新たなホールディングパターンを管制官等が登録することができる。
【0065】
そして、上述の入力画面に従って、ホールディングパターンのデータが入力されると、これら入力された値と、上述の式(1)〜式(24)に従って、制御部13がホールディングパターンを表す各座標を求める。求められた各座標は、ホールディングパターン情報としてホールディングパターン情報記憶部11に書き込まれる。
【0066】
また、図1における入力部14、制御部13の機能を実現するためのプログラムをコンピュータ読み取り可能な記録媒体に記録して、この記録媒体に記録されたプログラムをコンピュータシステムに読み込ませ、実行することにより航空機情報表示の制御を行ってもよい。なお、ここでいう「コンピュータシステム」とは、OSや周辺機器等のハードウェアを含むものとする。
【0067】
また、「コンピュータシステム」は、WWWシステムを利用している場合であれば、ホームページ提供環境(あるいは表示環境)も含むものとする。
また、「コンピュータ読み取り可能な記録媒体」とは、フレキシブルディスク、光磁気ディスク、ROM、CD−ROM等の可搬媒体、コンピュータシステムに内蔵されるハードディスク等の記憶装置のことをいう。さらに「コンピュータ読み取り可能な記録媒体」とは、インターネット等のネットワークや電話回線等の通信回線を介してプログラムを送信する場合の通信線のように、短時間の間、動的にプログラムを保持するもの、その場合のサーバやクライアントとなるコンピュータシステム内部の揮発性メモリのように、一定時間プログラムを保持しているものも含むものとする。また上記プログラムは、前述した機能の一部を実現するためのものであっても良く、さらに前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるものであってもよい。
【0068】
以上、この発明の実施形態について図面を参照して詳述してきたが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計等も含まれる。
【符号の説明】
【0069】
10 センサデータ取得部
11 ホールディングパターン情報記憶部
12 ホールディングターゲット情報記憶部
13 制御部
14 入力部
15 表示部
【特許請求の範囲】
【請求項1】
航空機の位置が観測され当該航空機の位置を表すデータであるセンサデータを取得するセンサデータ取得部と、
航空機がホールディング状態から離脱しないエリアである第1のエリアを示す第1の座標情報と、航空機がホールディング状態から離脱可能である第2のエリアを示す第2の座標情報とを記憶するエリア記憶部と、
前記航空機がどのエリアに存在するかを表す画像を表示する表示部と、
前記センサデータ取得部が取得したセンサデータと、前記エリア記憶部に記憶された第1または第2の座標情報と、に基づいて、前記センサデータが示す航空機の位置が前記第1のエリアにあるか第2のエリアにあるかを判定し、判定した結果に基づいて、前記表示部に、前記航空機が前記第1のエリアと前記第2のエリアとのいずれかに存在するかを表示させる制御部と、
を有することを特徴とする航空機情報表示装置。
【請求項2】
前記第1及び第2の座標情報を入力する入力部と、
前記入力部から入力される第1及び第2の座標情報を前記エリア記憶部に書き込む書き込み制御部と
を有することを特徴とする請求項1記載の航空機情報表示装置。
【請求項3】
前記第2のエリアのうち、ホールディング状態から離脱可能なエリアは、前記航空機の飛行方向に応じて、前記第1のエリアに対して進入するエリアであるインバウンドエリアと第1のエリアから離脱した後のエリアであるアウトバウンドエリアとであり、
前記エリア記憶部は、前記第2の座標情報としてインバウンドエリアを表す第3の座標情報とアウトバウンドエリアを表す第4の座標情報とを記憶しており、
前記制御部は、前記センサデータ取得部が取得したセンサデータと、前記エリア記憶部に記憶された第1の座標情報と第3の座標情報と第4の座標情報と、に基づいて、前記センサデータが示す航空機の位置がいずれのエリアにあるかを判定し、判定した結果に基づいて、前記表示部に、前記航空機が前記第1のエリアと前記第3のエリアと第4のエリアとのいずれかに存在するかを表示する
ことを特徴とする請求項1または請求項2記載の航空機情報表示装置。
【請求項4】
前記センサデータには、前記航空機の位置を表すデータとして、水平面上の位置を表す情報と高度を表す情報とが含まれており、
前記制御部は、前記センサデータの高度を表す情報基づいて、高度に応じた高さの位置であって、前記センサデータの水平面上の位置を表す情報と前記エリア記憶部に記憶された情報とに基づいて、前記航空機がどのエリアに存在するかを前記表示部に表示する
ことを特徴とする請求項1から請求項3のうちいずれかに記載の航空機情報表示装置。
【請求項5】
センサデータ取得部が、航空機の位置が観測され当該航空機の位置を表すデータであるセンサデータを取得し、
制御部が、航空機がホールディング状態から離脱しないエリアである第1のエリアを示す第1の座標情報と、航空機がホールディング状態から離脱可能である第2のエリアを示す第2の座標情報とを記憶するエリア記憶部に記憶された第1または第2の座標情報と、前記センサデータ取得部が取得したセンサデータとに基づいて、前記センサデータが示す航空機の位置が前記第1のエリアにあるか第2のエリアにあるかを判定し、
表示部が、前記制御部が判定した結果に基づいて、前記航空機が前記第1のエリアと前記第2のエリアとのいずれかに存在するかを表示する
ことを特徴とする航空機情報表示方法。
【請求項6】
コンピュータに、
航空機の位置が観測され当該航空機の位置を表すデータであるセンサデータを取得するセンサデータ取得手段、
航空機がホールディング状態から離脱しないエリアである第1のエリアを示す第1の座標情報と、航空機がホールディング状態から離脱可能である第2のエリアを示す第2の座標情報とを記憶するエリア記憶部に記憶された第1または第2の座標情報と、前記センサデータ取得手段が取得したセンサデータとに基づいて、前記センサデータが示す航空機の位置が前記第1のエリアにあるか第2のエリアにあるかを判定する制御手段、
前記制御手段が判定した結果に基づいて、前記航空機が前記第1のエリアと前記第2のエリアとのいずれかに存在するかを表示する表示手段、
として機能させるための航空機情報表示プログラム。
【請求項1】
航空機の位置が観測され当該航空機の位置を表すデータであるセンサデータを取得するセンサデータ取得部と、
航空機がホールディング状態から離脱しないエリアである第1のエリアを示す第1の座標情報と、航空機がホールディング状態から離脱可能である第2のエリアを示す第2の座標情報とを記憶するエリア記憶部と、
前記航空機がどのエリアに存在するかを表す画像を表示する表示部と、
前記センサデータ取得部が取得したセンサデータと、前記エリア記憶部に記憶された第1または第2の座標情報と、に基づいて、前記センサデータが示す航空機の位置が前記第1のエリアにあるか第2のエリアにあるかを判定し、判定した結果に基づいて、前記表示部に、前記航空機が前記第1のエリアと前記第2のエリアとのいずれかに存在するかを表示させる制御部と、
を有することを特徴とする航空機情報表示装置。
【請求項2】
前記第1及び第2の座標情報を入力する入力部と、
前記入力部から入力される第1及び第2の座標情報を前記エリア記憶部に書き込む書き込み制御部と
を有することを特徴とする請求項1記載の航空機情報表示装置。
【請求項3】
前記第2のエリアのうち、ホールディング状態から離脱可能なエリアは、前記航空機の飛行方向に応じて、前記第1のエリアに対して進入するエリアであるインバウンドエリアと第1のエリアから離脱した後のエリアであるアウトバウンドエリアとであり、
前記エリア記憶部は、前記第2の座標情報としてインバウンドエリアを表す第3の座標情報とアウトバウンドエリアを表す第4の座標情報とを記憶しており、
前記制御部は、前記センサデータ取得部が取得したセンサデータと、前記エリア記憶部に記憶された第1の座標情報と第3の座標情報と第4の座標情報と、に基づいて、前記センサデータが示す航空機の位置がいずれのエリアにあるかを判定し、判定した結果に基づいて、前記表示部に、前記航空機が前記第1のエリアと前記第3のエリアと第4のエリアとのいずれかに存在するかを表示する
ことを特徴とする請求項1または請求項2記載の航空機情報表示装置。
【請求項4】
前記センサデータには、前記航空機の位置を表すデータとして、水平面上の位置を表す情報と高度を表す情報とが含まれており、
前記制御部は、前記センサデータの高度を表す情報基づいて、高度に応じた高さの位置であって、前記センサデータの水平面上の位置を表す情報と前記エリア記憶部に記憶された情報とに基づいて、前記航空機がどのエリアに存在するかを前記表示部に表示する
ことを特徴とする請求項1から請求項3のうちいずれかに記載の航空機情報表示装置。
【請求項5】
センサデータ取得部が、航空機の位置が観測され当該航空機の位置を表すデータであるセンサデータを取得し、
制御部が、航空機がホールディング状態から離脱しないエリアである第1のエリアを示す第1の座標情報と、航空機がホールディング状態から離脱可能である第2のエリアを示す第2の座標情報とを記憶するエリア記憶部に記憶された第1または第2の座標情報と、前記センサデータ取得部が取得したセンサデータとに基づいて、前記センサデータが示す航空機の位置が前記第1のエリアにあるか第2のエリアにあるかを判定し、
表示部が、前記制御部が判定した結果に基づいて、前記航空機が前記第1のエリアと前記第2のエリアとのいずれかに存在するかを表示する
ことを特徴とする航空機情報表示方法。
【請求項6】
コンピュータに、
航空機の位置が観測され当該航空機の位置を表すデータであるセンサデータを取得するセンサデータ取得手段、
航空機がホールディング状態から離脱しないエリアである第1のエリアを示す第1の座標情報と、航空機がホールディング状態から離脱可能である第2のエリアを示す第2の座標情報とを記憶するエリア記憶部に記憶された第1または第2の座標情報と、前記センサデータ取得手段が取得したセンサデータとに基づいて、前記センサデータが示す航空機の位置が前記第1のエリアにあるか第2のエリアにあるかを判定する制御手段、
前記制御手段が判定した結果に基づいて、前記航空機が前記第1のエリアと前記第2のエリアとのいずれかに存在するかを表示する表示手段、
として機能させるための航空機情報表示プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2011−81625(P2011−81625A)
【公開日】平成23年4月21日(2011.4.21)
【国際特許分類】
【出願番号】特願2009−233744(P2009−233744)
【出願日】平成21年10月7日(2009.10.7)
【出願人】(000102728)株式会社エヌ・ティ・ティ・データ (438)
【Fターム(参考)】
【公開日】平成23年4月21日(2011.4.21)
【国際特許分類】
【出願日】平成21年10月7日(2009.10.7)
【出願人】(000102728)株式会社エヌ・ティ・ティ・データ (438)
【Fターム(参考)】
[ Back to top ]