
航空機用ガスタービン・エンジンの制御装置

【目的】2個の制御系統の両方が故障した場合であっても、それらの故障の程度(故障レベルの大小)を考慮してエンジン制御を継続するようにした航空機用ガスタービン・エンジンの制御装置を提供する。
【解決手段】2個の制御系統(Channel A,B)がそれぞれ、入力された出力信号に基づいてセンサと機器に異常があるか否か検知し、センサと機器のいずれかに異常があると検知されたとき、異常を有するセンサと機器の種類および個数に基づいて自己の制御系統の故障の程度(故障レベルの大小)を判定し、判定された故障レベルを他方の制御系統に送信すると共に、他方の故障レベルを受信し、自己の故障レベルと他方の故障レベルを比較し、故障レベルにおいて小さい(より健全な)側の制御系統の指令値を機器に出力するように構成する。
【解決手段】2個の制御系統(Channel A,B)がそれぞれ、入力された出力信号に基づいてセンサと機器に異常があるか否か検知し、センサと機器のいずれかに異常があると検知されたとき、異常を有するセンサと機器の種類および個数に基づいて自己の制御系統の故障の程度(故障レベルの大小)を判定し、判定された故障レベルを他方の制御系統に送信すると共に、他方の故障レベルを受信し、自己の故障レベルと他方の故障レベルを比較し、故障レベルにおいて小さい(より健全な)側の制御系統の指令値を機器に出力するように構成する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は航空機用ガスタービン・エンジンの制御装置に関する。
【背景技術】
【0002】
航空機用ガスタービン・エンジンの制御装置にあっては、複数種のセンサからの出力信号を入力し、その出力信号に基づいてエンジンの動作を制御するための指令値を算出する制御系統を2個冗長的に備え、2個の制御系統の内、指令値を出力する側の制御系統が故障した場合であっても、制御系統を切り換え、他方で算出された指令値を出力することで、エンジン制御を継続するようにしている(下記特許文献1,2参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−107751号公報
【特許文献2】米国特許第4,716,531号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献記載の技術は、2個の制御系統の内、いずれか一方が故障し、他方が正常である場合を前提にしたものであり、両方が故障した場合には予め決められたエンジン制御、具体的にはエンジン停止制御を実行することを提案する限りであった。即ち、両方が故障した場合であっても、それらの故障レベルの大小を考慮してエンジン制御を継続することを提案するものではなかった。
【0005】
従って、この発明の目的は上記した課題を解決し、2個の制御系統の両方が故障した場合であっても、それらの故障レベルの大小を考慮してエンジン制御を継続するようにした航空機用ガスタービン・エンジンの制御装置を提供することにある。
【課題を解決するための手段】
【0006】
上記の目的を達成するために、請求項1にあっては、ガスタービン・エンジンに配置された複数種のセンサからの出力信号を入力し、前記入力された出力信号に基づいて前記エンジンの動作を複数種の機器を介して制御するための指令値を算出する指令値算出部をそれぞれ有する2個の制御系統を備えると共に、前記2個の制御系統の指令値算出部のいずれかで算出された指令値を前記機器に出力し、前記エンジンの動作を制御する航空機用ガスタービン・エンジンの制御装置において、前記2個の制御系統がそれぞれ、前記入力された出力信号に基づいて前記センサと機器に異常があるか否か検知し、前記センサと機器のいずれかに異常があると検知されたとき、前記異常と検知されたセンサと機器の種類および個数に基づき、故障の軽重に従って自己の制御系統の故障レベルを数値で判定する故障レベル判定手段と、前記判定された故障レベルを前記他方に送信する送信手段と、前記他方の故障レベルを受信する受信手段と、前記判定された自己の故障レベルと前記受信された他方の故障レベルを比較し、前記故障レベルの数値において小さい(より健全な)側の制御系統の指令値算出部で算出された指令値を前記機器に出力する出力手段とを備える如く構成した。
【0007】
また、請求項2に係る航空機用ガスタービン・エンジンの制御装置にあっては、前記2個の制御系統はそれぞれ、前記指令値算出部の異常を監視する監視手段を備える如く構成した。
【発明の効果】
【0008】
請求項1に係る航空機用ガスタービン・エンジンの制御装置にあっては、2個の制御系統がそれぞれ、入力された出力信号に基づいてセンサと機器に異常があるか否か検知し、センサと機器のいずれかに異常があると検知されたとき、異常と検知されたセンサと機器の種類および個数に基づき、故障の軽重に従って自己の制御系統の故障レベルを数値で判定し、判定された故障レベルを他方の制御系統に送信すると共に、他方の故障レベルを受信し、自己の故障レベルと他方の故障レベルを比較し、故障レベルの数値において小さい(より健全な)側の制御系統の指令値を機器に出力する如く構成、即ち、2個の制御系統の両方が故障した場合であっても、故障レベルの小さい(より健全な)側の制御系統でエンジンを制御する如く構成したので、2個の制御系統の両方が故障した場合であっても、エンジン制御を継続させることができる。
【0009】
請求項2に係る航空機用ガスタービン・エンジンの制御装置にあっては、各々の制御系統が各々の指令値算出部の異常を監視する監視手段を備える如く構成したので、例えば一方の指令値算出部が監視手段によって異常と判断されたとき、その制御系統で算出された指令値を機器に出力しないようにすると共に、他方の制御系統で算出された指令値を機器に出力することで、エンジンを適切に制御することができる。
【図面の簡単な説明】
【0010】
【図1】この発明の実施例に係る航空機用ガスタービン・エンジンの制御装置の前提となるガスタービン・エンジンを全体的に示す概略図である。
【図2】図1のECU(電子制御ユニット)の構成を具体的に示すブロック図である。
【図3】図2のCPU(演算装置)において判定される故障レベルについて説明する表である。
【図4】図2の各制御系統で実行される、この発明に係る航空機用ガスタービン・エンジンの制御装置の動作を示すフロー・チャートである。
【発明を実施するための形態】
【0011】
以下、添付図面に即してこの発明に係る航空機用ガスタービン・エンジンの制御装置を実施するための形態について説明する。
【実施例】
【0012】
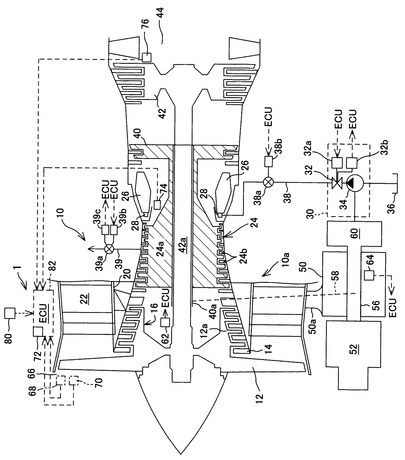
図1は、その航空機用ガスタービン・エンジンの制御装置の前提となるガスタービン・エンジンを全体的に示す概略図である。
【0013】
図1において、符号1はこの発明に係る航空機用ガスタービン・エンジンの制御装置を示す。理解の便宜のため、この装置の前提となるガスタービン・エンジンについて説明する。
【0014】
ガスタービン・エンジンとしては、ターボジェット・エンジン、ターボファン・エンジン、ターボプロップ・エンジンおよびターボシャフト・エンジンの4種が知られているが、以下、2軸のターボファン・エンジンについて説明する。
【0015】
図1において、符号10はターボファン・エンジン(ガスタービン・エンジン。以下「エンジン」という)を示し、符号10aはエンジン本体を示す。エンジン10は航空機(機体。図示せず)の適宜位置にマウントされる。
【0016】
エンジン10はファン(ファン動翼)12を備え、ファン12は高速で回転しつつ外気から空気を吸引する。ファン12にはロータ12aが一体的に形成され、ロータ12aは対向して配置されたステータ14と共に低圧圧縮機(コンプレッサ)16を構成し、そこで吸引した空気を圧縮しつつ後方に圧送する。
【0017】
尚、ファン12の付近にはセパレータ20によってダクト(バイパス)22が形成され、吸引された空気の大部分は後段(コア側)で燃焼させられることなく、ダクト22を通ってエンジン後方に噴出させられる。ファン排気は、その反作用としてエンジン10が搭載される機体(図示せず)に推力(スラスト)を生じさせる。推力の大部分は、このファン排気によって生じる。
【0018】
低圧圧縮機16で圧縮された空気は後段の高圧圧縮機24に送られ、そこでロータ24aおよびステータ24bによってさらに圧縮された後、後段の燃焼器26に送られる。
【0019】
燃焼器26には燃料ノズル28が備えられ、燃料ノズル28にはFCU(Fuel Control Unit 。燃料制御ユニットあるいは燃料制御部)30で調量された燃料が圧送される。即ち、FCU30は燃料調整弁(FMV(Fuel Metering Valve))32を備え、燃料ポンプ(ギヤポンプ)34によって機体の適宜位置に配置された燃料タンク36から汲み上げられた燃料は、燃料調整弁32で調量された後、燃料供給路38を通って燃料ノズル28に供給される。
【0020】
燃料調整弁32は、具体的には、それに接続されるトルクモータ32aによって開閉させられると共に、トルクモータ32aは後述するECU(Electronic Control Unit 。電子制御ユニット)から発せられる指令に基づいて燃料調整弁32を開閉駆動する。ECUはパイロットによって操作されるスラストレバー(図示なし)の位置に応じた指令を発する。また、燃料調整弁32の付近にはその開度を検出する開度センサ32bが設置される。尚、燃料調整弁32はノーマル・クローズ型の弁である。
【0021】
また、燃料供給路38には、燃料遮断弁(SOV(Shut Off Valve))38aが介挿される。燃料遮断弁38aはそれに接続される電磁ソレノイド38bによって開閉させられると共に、電磁ソレノイド38bは後述するECUから発せられる指令に基づいて燃料遮断弁38aを動作させる。具体的には、遮断指令が発せられると、燃料ノズル28への燃料供給を遮断するように燃料遮断弁38aを閉弁させる。尚、燃料遮断弁38aはノーマル・クローズ型の弁である。
【0022】
エンジン10には油圧回路39が設けられると共に、燃料調整弁32や燃料遮断弁38aの開閉動作に用いられる油圧を開放するための油圧開放弁(BOV(Bleed Off Valve))39aが備えられる。油圧開放弁39aも後述するECUから発せられる指令に基づいて電磁ソレノイド39bによって動作されると共に、油圧開放弁39aの付近にはその弁位置を検出する位置センサ39cが設置される。
【0023】
燃料ノズル28には高圧圧縮機24から圧縮空気が圧送され、燃料供給路38から供給される燃料はその圧縮空気で噴霧化される。燃料ノズル28は、高圧圧縮機24による圧縮空気のみを噴霧化に利用するエア・ブラスト・ノズル型のノズルである。
【0024】
燃料ノズル28から噴霧された燃料は、圧縮空気と混合し、エンジン始動時にエキサイタおよび点火プラグからなるイグニッション装置(図示せず)によって点火されて燃焼する。混合気は一度着火されて燃焼を開始すると、かかる圧縮空気と燃料からなる混合気を連続的に供給されて燃焼を継続する。
【0025】
燃焼によって生じた高温高圧ガスは高圧タービン40に噴射され、高圧タービン40を高速回転させる。高圧タービン40は前記した高圧圧縮機のロータ24aに高圧タービン軸40aを介して接続され、前記ロータ24aを回転させる。
【0026】
高温高圧ガスは、高圧タービン40を回転駆動した後、低圧タービン42に送られ(高圧タービン40を通過したガスは燃焼器から噴射されるガスに比して低圧となる)、低圧タービン42を比較的低速で回転させる。低圧タービン42は前記した低圧圧縮機16のロータ12aに低圧タービン軸42a(軸40aと同心二軸構造)を介して接続されており、前記ロータ12aおよびファン12を回転させる。
【0027】
低圧タービン42を通過した排ガス(タービン排気)は、ダクト22を通ってそのまま排出されるファン排気と混合させられてジェットノズル44からエンジン後方に噴出される。
【0028】
エンジン本体10aの外部下面の前側寄りには、アクセサリ・ドライブ・ギアボックス(以下「ギアボックス」という)50がステー50aを介して取り付けられると共に、ギアボックス50の前端には一体的に構成されたスタータおよびジェネレータ(以下「スタータ」と総称する)52が取り付けられる。尚、ギアボックス50の後端には前記したFCU30が配置される。
【0029】
エンジン10の始動時、スタータ52によって軸56が回転させられると、その回転は駆動軸58(および図示しないベベルギアなどのギア機構)を介して高圧タービン軸40aに伝えられ、圧縮空気が生成される。生成された圧縮空気は、前記したように燃料ノズル28に圧送される。
【0030】
他方、軸56の回転はPMA(パーマネントマグネット・オルタネータ)60と高圧(燃料)ポンプ34に伝えられて高圧(燃料)ポンプ34を駆動し、前記したように調量された燃料は燃料ノズル28に供給され、噴霧化される。よって生じた混合気は、点火されて燃焼を開始する。
【0031】
エンジン10が自立運転回転数に達すると、高圧タービン軸40aの回転が逆に駆動軸58(および図示しないベベルギアなどのギア機構)を介して軸56に伝えられ、燃料ポンプ34を駆動すると共に、PMA60とスタータ52を駆動する。それによって、PMA60は発電すると共に、スタータ52も発電して機体に電力を供給する。従って、特に機体側の電力負荷が増大すると、スタータ52による発電量が増大し、高圧タービン軸の回転負荷が増大することになり、後述する高圧タービン回転数に影響を与えることになる。
【0032】
エンジン10において、低圧タービン軸42aの付近にはN1センサ(回転数センサ)62が配置され、低圧タービン回転数(低圧タービン軸42aの回転数)N1に比例する信号を出力すると共に、軸56の付近にはN2センサ(回転数センサ)64が配置され、高圧タービン回転数(高圧タービン軸40aの回転数)N2に比例する信号を出力する。
【0033】
またエンジン本体10aの前面の空気取り入れ口66の付近にはT1センサ(温度センサ)68およびP1センサ(圧力センサ)70が配置され、流入空気の温度(航空機の外気温)T1および圧力P1に比例する信号を出力すると共に、後述するECUの内部にはP0センサ(圧力センサ)72が設けられ、大気圧P0に比例する信号を出力する。また、ECUの内部には温度センサ(図示せず)も設けられてECUの温度に比例する信号を出力する。大気圧P0と圧力P1の比から、航空機の飛行速度を示すマッハ数Mnが算出される。また、大気圧P0から航空機が飛行する高度ALTが算出される。
【0034】
またロータ24aの下流にはP3センサ(圧力センサ)74が配置されて高圧圧縮機24の出力圧(出口圧力)P3に比例する信号を出力すると共に、低圧タービン42の下流の適宜位置にはEGTセンサ(温度センサ)76が配置され、排ガス温度EGT(低圧タービン出口温度)に比例する信号を出力する。さらに、機体の車輪付近にはWOWセンサ(重量センサ)80が設置され、車輪にかかる重量を示す信号、即ち、機体が地上に接地しているか否かの信号を出力する。
【0035】
上記したセンサ種の内のいくつかは、安全性向上のため、冗長化される。具体的には、N1センサは2個、N2センサは4個、T1センサは2個、EGTセンサは8個、P0センサは2個、P1センサは2個(機体側からマッハ数Mn信号が送信され、それを利用して圧力P1を算出する場合、0個)、P3センサは2個設けられる。
【0036】
エンジン本体10aの上端位置には前記したECU(符号82で示す)が収納される。上記したエンジン10の運転状態を示すセンサ群の出力は、ECU82に送られる。
【0037】
ECU82は、センサ群の出力に基づいて燃料調整弁32や燃料遮断弁38aや油圧開放弁39aに対する指令値を算出し、それら機器に出力することでエンジンの動作を制御する。このように、前記した制御装置1は、ECU82から少なくともなる。以下、ECU82の具体的な構成および動作について説明する。
【0038】
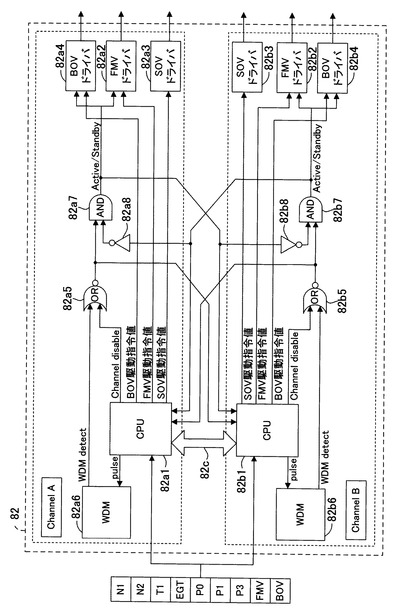
図2は、ECU82の構成を具体的に示すブロック図である。
【0039】
図示のように、ECU82は、制御系統A(Channnel A)と制御系統B(Channnel B)の2個の制御系統からなる。各制御系統はそれぞれ演算装置(CPU)82a1、82b1を有する。演算装置82a1、82b1には、前記したセンサ群(N1センサやN2センサなどは「N1」、「N2」などと略して示す。)からの出力信号が入力される。
【0040】
演算装置82a1、82b1はそれぞれ、入力された出力信号に基づいて燃料調整弁(FMV)32、燃料遮断弁(SOV)38aおよび油圧開放弁(BOV)39aの駆動指令値を算出し、それらを駆動制御するドライバ82a2、82a3、82a4、82b2、82b3、82b4に送出する。
【0041】
また、演算装置82a1、82b1はそれぞれ、入力された出力信号に基づいて各センサに異常があるか否か、およびエンジン制御に関わる機器、具体的には、燃料調整弁32や油圧開放弁39a(加えてイグニッション装置)に異常があるか否か検知する。
【0042】
センサの異常については、入力された出力信号が予め設定された所定範囲内のものでない場合、異常であると検知する。また、2個あるいは4個の冗長センサを備えるセンサ群については、各出力信号を比較し、他と一致しない出力信号のセンサを異常であると検知する。さらに、センサとCPU間の信号線の断線によってオープン信号が発せられる場合も、そのセンサは異常であると検知する。
【0043】
機器の異常については、その機器の動作を検出するセンサが正常であるとの前提のもと、機器を動作させる駆動指令値に従ってその機器が動作していない場合、異常であると検知する。また、機器とCPU間の信号線の断線によってオープン信号が発せられる場合もその機器は異常であると検知する。
【0044】
演算装置82a1、82b1はそれぞれ、各センサあるいは機器に異常があると検知されたとき、異常と検知されたセンサと機器の種類および個数に応じて予め設定された表に基づいて自己の制御系統の故障レベルを判定する。
【0045】
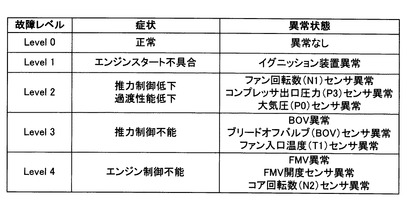
図3は、その故障レベルについて説明する表である。
【0046】
図示のように、各センサおよび機器に異常がない場合、その制御系統は正常であり、故障レベルは0(Level 0)に設定される。
【0047】
一方、イグニッション装置の異常が検知された場合、エンジンスタートに不具合があるとし、故障レベルを1(Level 1)と判定する。
【0048】
ファン回転数(N1)センサ(N1センサ62)あるいはコンプレッサ出口圧力(P3)センサ(P3センサ74)あるいは大気圧力(P0)センサ(P0センサ72)に異常があると検知された場合、推力制御や過渡性能が低下しているとし、故障レベルを2(Level 2)と判定する。
【0049】
また、BOV(油圧開放弁39a)の異常が検知された場合やブリードオフバルブ(BOV)センサ(油圧開放弁39aの位置センサ39c)に異常があると検知された場合やファン入口温度(T1)センサ(T1センサ68)に異常があると検知された場合、推力制御不能とし、故障レベルを3(Level 3)と判定する。
【0050】
さらに、FMV(燃料調整弁32)の異常が検知された場合やFMV開度センサ(燃料調整弁32の開度センサ32b)に異常があると検知された場合やコア回転数(N2)センサ(N2センサ64)に異常があると検知された場合、エンジン制御不能とし、故障レベルを4(Level 4)と判定する。
【0051】
このように、演算装置82a1、82b1はそれぞれ、故障の軽重に従って自己の制御系統の故障レベルを数値で判定する。
【0052】
図2の説明を続けると、2個の制御系統A、Bは公知のCAN(Controller Area Network)通信82cを介して通信自在に接続される。即ち、各々の制御系統は自己の故障レベルを他方に送信する送信手段と他方の故障レベルを受信する受信手段を備え、互いに自己の制御系統の故障レベルを他方に送信すると共に、他方の故障レベルを受信する。
【0053】
演算装置82a1、82b1はそれぞれ、自己の故障レベルと他方の故障レベルの値を比較し、自己の故障レベルの値が大きい(より不健全な)場合、自己の制御系統を不能にする信号(Channel disable信号)をNOR回路82a5、82b5に送信する。
【0054】
また、2個の制御系統A、Bには、CPU82a1、82b1から動作パルス(pulse)を受けてその異常を監視するウオッチ・ドック・モニタ(WDM(Watch Dog Monitor))82a6、82b6が備えられ、CPU82a1、82b1が異常であるときに発せられる異常信号(WDM detect信号)もNOR回路82a5、82b5に送信される。
【0055】
NOR回路82a5、82b5の出力は自己の故障判定信号であり、それぞれ後段の自己のAND回路82a7、82b7に送られると共に、互いに他方のCPU82a1、82b1にも送られる。
【0056】
AND回路82a7、82b7の出力は自己のActive/Standby判定信号であり、自己のドライバ82a2、82a4、82b2、82b4に送られると共に、NOT回路82a8、82b8を介して互いに他方のAND回路82a7、82b7にも送られる。さらには、互いに他方のCPU82a1、82b1にも送られる。AND回路82a7、82b7では、自己の故障判定信号が正常(健全)を示し、かつ他方のActive/Standby判定信号がStandby信号である場合、自己のActive/Standby判定信号としてActive信号を出力する。
【0057】
AND回路82a7、82b7からActive信号(Hレベル信号)が出力される場合、その信号が入力されるドライバ82a2、82a4、82b2、82b4では、CPU82a1、82b1によって算出されたFMV駆動指令値およびBOV駆動指令値を電流指令値に変換し、それをFMVおよびBOVに実際に出力することになる。
【0058】
逆に、AND回路82a7、82b7からStandby信号(Lレベル信号)が出力される場合、その信号が入力されるドライバ82a2、82a4、82b2、82b4では、CPU82a1、82b1によって算出されたFMV駆動指令値およびBOV駆動指令値を電流指令値に変換することなく、指令値は実際にはFMVおよびBOVに出力されないことになる。
【0059】
尚、CPU82a1、82b1によって算出されたSOV駆動指令値は、AND回路82a7、82b7からの出力によらず、ドライバ82a3、82a3で電流指令値に変換され、実際にSOVに出力される。
【0060】
以上の構成から、例えば制御系統Aにおいて、自己の制御系統の故障レベルが他方よりも小さく、かつ自己のCPU82a1に異常がなく、かつ制御系統Bがスタンバイ(Standby信号(Lレベル信号)を発する状態、即ち、指令値を出力しない状態(待機状態))にある場合、制御系統Aはアクティブ(Active信号(Hレベル信号)を発する状態、即ち、指令値を出力する状態(活動状態))となる。また、制御系統Aがアクティブであるとの情報は制御系統Bに送信される。一方、例えば制御系統Aにおいて、自己の制御系統の故障レベルが他方よりも大きい場合、スタンバイとなると共に、その情報は制御系統Bに送信される。
【0061】
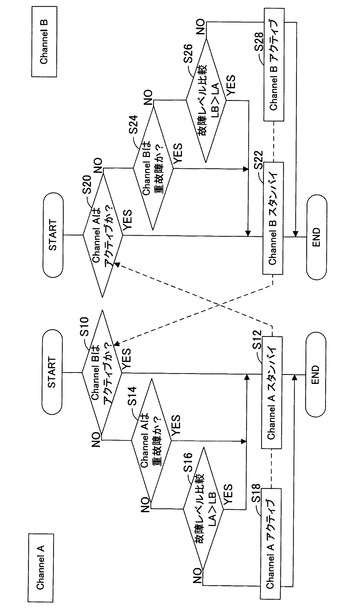
図4は、各制御系統で実行される、この発明に係る航空機用ガスタービン・エンジンの制御装置の動作を示すフロー・チャートである。
【0062】
図示のように、左側のフロー・チャートは制御系統Aにおいて、右側のフロー・チャートは制御系統Bにおいてそれぞれ並行して実行される。また、これらのプログラムは所定時間、例えば10msecごとに実行される。
【0063】
まず制御系統A側のS10において、制御系統Bがアクティブであるか否か判断する。肯定される場合、S12に進んで制御系統Aをスタンバイとする。一方、否定される場合、S14に進む。
【0064】
S14においては、制御系統Aが重故障であるか否か判断する。ここでの重故障とは、ウオッチ・ドック・モニタ82a6によって制御系統AのCPU82a1が異常と判断される場合、制御系統Aの動作電力が低下した場合、あるいは故障レベル4の判定となるような重大な故障をいう。肯定される場合、S12に進んで制御系統Aをスタンバイとする。一方、否定される場合、S16に進む。
【0065】
S16においては、制御系統Aの故障レベルLAと制御系統Bの故障レベルLBの大小を比較する。故障レベルLAの方が故障レベルLBよりも大である(より不健全な)とき、肯定され、S12に進んで制御系統Aをスタンバイとする。一方、故障レベルLAの方が故障レベルLBよりも小である(より健全な)とき、否定され、S18に進んで制御系統Aをアクティブとする。尚、前記したように、制御系統Aがスタンバイであるかアクティブであるかの情報は、制御系統Bに送られる。
【0066】
制御系統Bにおいても、制御系統Aと同様なプログラム処理が実行される。以下説明すると、まずS20において、制御系統Aがアクティブであるか否か判断する。肯定される場合、S22に進んで制御系統Bをスタンバイとする。一方、否定される場合、S24に進む。
【0067】
S24においては、制御系統Bが重故障であるか否か判断する。ここでの重故障とは、ウオッチ・ドック・モニタ82b6によって制御系統BのCPU82b1が異常と判断される場合、制御系統Bの動作電力が低下した場合、あるいは故障レベル4の判定となるような重大な故障をいう。肯定される場合、S22に進んで制御系統Bをスタンバイとする。一方、否定される場合、S26に進む。
【0068】
S26においては、制御系統Bの故障レベルLBと制御系統Aの故障レベルLAの大小を比較する。故障レベルLBの方が故障レベルLAよりも大である(より不健全な)とき、肯定され、S22に進んで制御系統Bをスタンバイとする。一方、故障レベルLBの方が故障レベルLAよりも小である(より健全な)とき、否定され、S28に進んで制御系統Bをアクティブとする。尚、前記したように、制御系統Bがスタンバイであるかアクティブであるかの情報は、制御系統Aに送られる。
【0069】
上記した如く、この実施例にあっては、ガスタービン・エンジン(10)に配置された複数種のセンサ(N1センサ62、N2センサ64など)からの出力信号を入力し、前記入力された出力信号に基づいて前記エンジンの動作を複数種の機器(燃料調整弁(FMV)32、油圧開放弁(BOV)39a)を介して制御するための指令値(FMV駆動指令値、BOV駆動指令値)を算出する指令値算出部(CPU82a1、82b1)をそれぞれ有する2個の制御系統(Channel A、B)を備えると共に、前記2個の制御系統の指令値算出部のいずれかで算出された指令値を前記機器に出力し、前記エンジンの動作を制御する航空機用ガスタービン・エンジンの制御装置において、前記2個の制御系統がそれぞれ、前記入力された出力信号に基づいて前記センサと機器に異常があるか否か検知し、前記センサと機器のいずれかに異常があると検知されたとき、前記異常と検知されたセンサと機器の種類および個数に基づき、故障の軽重に従って自己の制御系統の故障レベルを数値で判定する故障レベル判定手段(CPU82a1、82b1、図3の表)と、前記判定された故障レベルを前記他方に送信する送信手段(CAN通信82c)と、前記他方の故障レベルを受信する受信手段(CAN通信82c)と、前記判定された自己の故障レベルと前記受信された他方の故障レベルを比較し、前記故障レベルの数値において小さい(より健全な)側の制御系統の指令値算出部で算出された指令値を前記機器に出力する出力手段(AND回路82a7、82b7、S16、S26)とを備える如く構成した。
【0070】
即ち、2個の制御系統の両方が故障した場合であっても、故障レベルの小さい(より健全な)側の制御系統でエンジンを制御する如く構成したので、2個の制御系統の両方が故障した場合であっても、エンジン制御を継続させることができる。
【0071】
また、前記2個の制御系統はそれぞれ、前記指令値算出部の異常を監視する監視手段(ウオッチ・ドック・モニタ(WDM(Watch Dog Monitor))82a6、82b6)を備える如く構成した。
【0072】
それにより、例えば一方の指令値算出部が監視手段によって異常と判断されたとき、その制御系統で算出された指令値を機器に出力しないようにすると共に、他方の制御系統で算出された指令値を機器に出力することで、エンジンを適切に制御することができる。
【0073】
尚、上記においては2軸のターボファン・エンジンを例にとって説明したが、ターボジェット・エンジン、その他のターボファン・エンジン、ターボプロップ・エンジンおよびターボシャフト・エンジンに対してこの発明に係る航空機用ガスタービン・エンジンの制御装置を適用しても良い。
【符号の説明】
【0074】
10 エンジン、32 燃料調整弁(FMV)、32b (FMV)開度センサ、38a 燃料遮断弁(SOV)、39a 油圧開放弁(BOV)、39c (BOV)位置センサ、62 N1センサ、64 N2センサ、68 T1センサ、70 P1センサ、72 P0センサ、74 P3センサ、76 EGTセンサ、82 ECU、82a1,82b1 CPU(指令値算出部)、82a6,82b6 ウオッチ・ドック・モニタ(監視手段)、82a7,82b7 AND回路(出力手段)、82c CAN通信(送信手段、受信手段)、A,B 制御系統
【技術分野】
【0001】
この発明は航空機用ガスタービン・エンジンの制御装置に関する。
【背景技術】
【0002】
航空機用ガスタービン・エンジンの制御装置にあっては、複数種のセンサからの出力信号を入力し、その出力信号に基づいてエンジンの動作を制御するための指令値を算出する制御系統を2個冗長的に備え、2個の制御系統の内、指令値を出力する側の制御系統が故障した場合であっても、制御系統を切り換え、他方で算出された指令値を出力することで、エンジン制御を継続するようにしている(下記特許文献1,2参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−107751号公報
【特許文献2】米国特許第4,716,531号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献記載の技術は、2個の制御系統の内、いずれか一方が故障し、他方が正常である場合を前提にしたものであり、両方が故障した場合には予め決められたエンジン制御、具体的にはエンジン停止制御を実行することを提案する限りであった。即ち、両方が故障した場合であっても、それらの故障レベルの大小を考慮してエンジン制御を継続することを提案するものではなかった。
【0005】
従って、この発明の目的は上記した課題を解決し、2個の制御系統の両方が故障した場合であっても、それらの故障レベルの大小を考慮してエンジン制御を継続するようにした航空機用ガスタービン・エンジンの制御装置を提供することにある。
【課題を解決するための手段】
【0006】
上記の目的を達成するために、請求項1にあっては、ガスタービン・エンジンに配置された複数種のセンサからの出力信号を入力し、前記入力された出力信号に基づいて前記エンジンの動作を複数種の機器を介して制御するための指令値を算出する指令値算出部をそれぞれ有する2個の制御系統を備えると共に、前記2個の制御系統の指令値算出部のいずれかで算出された指令値を前記機器に出力し、前記エンジンの動作を制御する航空機用ガスタービン・エンジンの制御装置において、前記2個の制御系統がそれぞれ、前記入力された出力信号に基づいて前記センサと機器に異常があるか否か検知し、前記センサと機器のいずれかに異常があると検知されたとき、前記異常と検知されたセンサと機器の種類および個数に基づき、故障の軽重に従って自己の制御系統の故障レベルを数値で判定する故障レベル判定手段と、前記判定された故障レベルを前記他方に送信する送信手段と、前記他方の故障レベルを受信する受信手段と、前記判定された自己の故障レベルと前記受信された他方の故障レベルを比較し、前記故障レベルの数値において小さい(より健全な)側の制御系統の指令値算出部で算出された指令値を前記機器に出力する出力手段とを備える如く構成した。
【0007】
また、請求項2に係る航空機用ガスタービン・エンジンの制御装置にあっては、前記2個の制御系統はそれぞれ、前記指令値算出部の異常を監視する監視手段を備える如く構成した。
【発明の効果】
【0008】
請求項1に係る航空機用ガスタービン・エンジンの制御装置にあっては、2個の制御系統がそれぞれ、入力された出力信号に基づいてセンサと機器に異常があるか否か検知し、センサと機器のいずれかに異常があると検知されたとき、異常と検知されたセンサと機器の種類および個数に基づき、故障の軽重に従って自己の制御系統の故障レベルを数値で判定し、判定された故障レベルを他方の制御系統に送信すると共に、他方の故障レベルを受信し、自己の故障レベルと他方の故障レベルを比較し、故障レベルの数値において小さい(より健全な)側の制御系統の指令値を機器に出力する如く構成、即ち、2個の制御系統の両方が故障した場合であっても、故障レベルの小さい(より健全な)側の制御系統でエンジンを制御する如く構成したので、2個の制御系統の両方が故障した場合であっても、エンジン制御を継続させることができる。
【0009】
請求項2に係る航空機用ガスタービン・エンジンの制御装置にあっては、各々の制御系統が各々の指令値算出部の異常を監視する監視手段を備える如く構成したので、例えば一方の指令値算出部が監視手段によって異常と判断されたとき、その制御系統で算出された指令値を機器に出力しないようにすると共に、他方の制御系統で算出された指令値を機器に出力することで、エンジンを適切に制御することができる。
【図面の簡単な説明】
【0010】
【図1】この発明の実施例に係る航空機用ガスタービン・エンジンの制御装置の前提となるガスタービン・エンジンを全体的に示す概略図である。
【図2】図1のECU(電子制御ユニット)の構成を具体的に示すブロック図である。
【図3】図2のCPU(演算装置)において判定される故障レベルについて説明する表である。
【図4】図2の各制御系統で実行される、この発明に係る航空機用ガスタービン・エンジンの制御装置の動作を示すフロー・チャートである。
【発明を実施するための形態】
【0011】
以下、添付図面に即してこの発明に係る航空機用ガスタービン・エンジンの制御装置を実施するための形態について説明する。
【実施例】
【0012】
図1は、その航空機用ガスタービン・エンジンの制御装置の前提となるガスタービン・エンジンを全体的に示す概略図である。
【0013】
図1において、符号1はこの発明に係る航空機用ガスタービン・エンジンの制御装置を示す。理解の便宜のため、この装置の前提となるガスタービン・エンジンについて説明する。
【0014】
ガスタービン・エンジンとしては、ターボジェット・エンジン、ターボファン・エンジン、ターボプロップ・エンジンおよびターボシャフト・エンジンの4種が知られているが、以下、2軸のターボファン・エンジンについて説明する。
【0015】
図1において、符号10はターボファン・エンジン(ガスタービン・エンジン。以下「エンジン」という)を示し、符号10aはエンジン本体を示す。エンジン10は航空機(機体。図示せず)の適宜位置にマウントされる。
【0016】
エンジン10はファン(ファン動翼)12を備え、ファン12は高速で回転しつつ外気から空気を吸引する。ファン12にはロータ12aが一体的に形成され、ロータ12aは対向して配置されたステータ14と共に低圧圧縮機(コンプレッサ)16を構成し、そこで吸引した空気を圧縮しつつ後方に圧送する。
【0017】
尚、ファン12の付近にはセパレータ20によってダクト(バイパス)22が形成され、吸引された空気の大部分は後段(コア側)で燃焼させられることなく、ダクト22を通ってエンジン後方に噴出させられる。ファン排気は、その反作用としてエンジン10が搭載される機体(図示せず)に推力(スラスト)を生じさせる。推力の大部分は、このファン排気によって生じる。
【0018】
低圧圧縮機16で圧縮された空気は後段の高圧圧縮機24に送られ、そこでロータ24aおよびステータ24bによってさらに圧縮された後、後段の燃焼器26に送られる。
【0019】
燃焼器26には燃料ノズル28が備えられ、燃料ノズル28にはFCU(Fuel Control Unit 。燃料制御ユニットあるいは燃料制御部)30で調量された燃料が圧送される。即ち、FCU30は燃料調整弁(FMV(Fuel Metering Valve))32を備え、燃料ポンプ(ギヤポンプ)34によって機体の適宜位置に配置された燃料タンク36から汲み上げられた燃料は、燃料調整弁32で調量された後、燃料供給路38を通って燃料ノズル28に供給される。
【0020】
燃料調整弁32は、具体的には、それに接続されるトルクモータ32aによって開閉させられると共に、トルクモータ32aは後述するECU(Electronic Control Unit 。電子制御ユニット)から発せられる指令に基づいて燃料調整弁32を開閉駆動する。ECUはパイロットによって操作されるスラストレバー(図示なし)の位置に応じた指令を発する。また、燃料調整弁32の付近にはその開度を検出する開度センサ32bが設置される。尚、燃料調整弁32はノーマル・クローズ型の弁である。
【0021】
また、燃料供給路38には、燃料遮断弁(SOV(Shut Off Valve))38aが介挿される。燃料遮断弁38aはそれに接続される電磁ソレノイド38bによって開閉させられると共に、電磁ソレノイド38bは後述するECUから発せられる指令に基づいて燃料遮断弁38aを動作させる。具体的には、遮断指令が発せられると、燃料ノズル28への燃料供給を遮断するように燃料遮断弁38aを閉弁させる。尚、燃料遮断弁38aはノーマル・クローズ型の弁である。
【0022】
エンジン10には油圧回路39が設けられると共に、燃料調整弁32や燃料遮断弁38aの開閉動作に用いられる油圧を開放するための油圧開放弁(BOV(Bleed Off Valve))39aが備えられる。油圧開放弁39aも後述するECUから発せられる指令に基づいて電磁ソレノイド39bによって動作されると共に、油圧開放弁39aの付近にはその弁位置を検出する位置センサ39cが設置される。
【0023】
燃料ノズル28には高圧圧縮機24から圧縮空気が圧送され、燃料供給路38から供給される燃料はその圧縮空気で噴霧化される。燃料ノズル28は、高圧圧縮機24による圧縮空気のみを噴霧化に利用するエア・ブラスト・ノズル型のノズルである。
【0024】
燃料ノズル28から噴霧された燃料は、圧縮空気と混合し、エンジン始動時にエキサイタおよび点火プラグからなるイグニッション装置(図示せず)によって点火されて燃焼する。混合気は一度着火されて燃焼を開始すると、かかる圧縮空気と燃料からなる混合気を連続的に供給されて燃焼を継続する。
【0025】
燃焼によって生じた高温高圧ガスは高圧タービン40に噴射され、高圧タービン40を高速回転させる。高圧タービン40は前記した高圧圧縮機のロータ24aに高圧タービン軸40aを介して接続され、前記ロータ24aを回転させる。
【0026】
高温高圧ガスは、高圧タービン40を回転駆動した後、低圧タービン42に送られ(高圧タービン40を通過したガスは燃焼器から噴射されるガスに比して低圧となる)、低圧タービン42を比較的低速で回転させる。低圧タービン42は前記した低圧圧縮機16のロータ12aに低圧タービン軸42a(軸40aと同心二軸構造)を介して接続されており、前記ロータ12aおよびファン12を回転させる。
【0027】
低圧タービン42を通過した排ガス(タービン排気)は、ダクト22を通ってそのまま排出されるファン排気と混合させられてジェットノズル44からエンジン後方に噴出される。
【0028】
エンジン本体10aの外部下面の前側寄りには、アクセサリ・ドライブ・ギアボックス(以下「ギアボックス」という)50がステー50aを介して取り付けられると共に、ギアボックス50の前端には一体的に構成されたスタータおよびジェネレータ(以下「スタータ」と総称する)52が取り付けられる。尚、ギアボックス50の後端には前記したFCU30が配置される。
【0029】
エンジン10の始動時、スタータ52によって軸56が回転させられると、その回転は駆動軸58(および図示しないベベルギアなどのギア機構)を介して高圧タービン軸40aに伝えられ、圧縮空気が生成される。生成された圧縮空気は、前記したように燃料ノズル28に圧送される。
【0030】
他方、軸56の回転はPMA(パーマネントマグネット・オルタネータ)60と高圧(燃料)ポンプ34に伝えられて高圧(燃料)ポンプ34を駆動し、前記したように調量された燃料は燃料ノズル28に供給され、噴霧化される。よって生じた混合気は、点火されて燃焼を開始する。
【0031】
エンジン10が自立運転回転数に達すると、高圧タービン軸40aの回転が逆に駆動軸58(および図示しないベベルギアなどのギア機構)を介して軸56に伝えられ、燃料ポンプ34を駆動すると共に、PMA60とスタータ52を駆動する。それによって、PMA60は発電すると共に、スタータ52も発電して機体に電力を供給する。従って、特に機体側の電力負荷が増大すると、スタータ52による発電量が増大し、高圧タービン軸の回転負荷が増大することになり、後述する高圧タービン回転数に影響を与えることになる。
【0032】
エンジン10において、低圧タービン軸42aの付近にはN1センサ(回転数センサ)62が配置され、低圧タービン回転数(低圧タービン軸42aの回転数)N1に比例する信号を出力すると共に、軸56の付近にはN2センサ(回転数センサ)64が配置され、高圧タービン回転数(高圧タービン軸40aの回転数)N2に比例する信号を出力する。
【0033】
またエンジン本体10aの前面の空気取り入れ口66の付近にはT1センサ(温度センサ)68およびP1センサ(圧力センサ)70が配置され、流入空気の温度(航空機の外気温)T1および圧力P1に比例する信号を出力すると共に、後述するECUの内部にはP0センサ(圧力センサ)72が設けられ、大気圧P0に比例する信号を出力する。また、ECUの内部には温度センサ(図示せず)も設けられてECUの温度に比例する信号を出力する。大気圧P0と圧力P1の比から、航空機の飛行速度を示すマッハ数Mnが算出される。また、大気圧P0から航空機が飛行する高度ALTが算出される。
【0034】
またロータ24aの下流にはP3センサ(圧力センサ)74が配置されて高圧圧縮機24の出力圧(出口圧力)P3に比例する信号を出力すると共に、低圧タービン42の下流の適宜位置にはEGTセンサ(温度センサ)76が配置され、排ガス温度EGT(低圧タービン出口温度)に比例する信号を出力する。さらに、機体の車輪付近にはWOWセンサ(重量センサ)80が設置され、車輪にかかる重量を示す信号、即ち、機体が地上に接地しているか否かの信号を出力する。
【0035】
上記したセンサ種の内のいくつかは、安全性向上のため、冗長化される。具体的には、N1センサは2個、N2センサは4個、T1センサは2個、EGTセンサは8個、P0センサは2個、P1センサは2個(機体側からマッハ数Mn信号が送信され、それを利用して圧力P1を算出する場合、0個)、P3センサは2個設けられる。
【0036】
エンジン本体10aの上端位置には前記したECU(符号82で示す)が収納される。上記したエンジン10の運転状態を示すセンサ群の出力は、ECU82に送られる。
【0037】
ECU82は、センサ群の出力に基づいて燃料調整弁32や燃料遮断弁38aや油圧開放弁39aに対する指令値を算出し、それら機器に出力することでエンジンの動作を制御する。このように、前記した制御装置1は、ECU82から少なくともなる。以下、ECU82の具体的な構成および動作について説明する。
【0038】
図2は、ECU82の構成を具体的に示すブロック図である。
【0039】
図示のように、ECU82は、制御系統A(Channnel A)と制御系統B(Channnel B)の2個の制御系統からなる。各制御系統はそれぞれ演算装置(CPU)82a1、82b1を有する。演算装置82a1、82b1には、前記したセンサ群(N1センサやN2センサなどは「N1」、「N2」などと略して示す。)からの出力信号が入力される。
【0040】
演算装置82a1、82b1はそれぞれ、入力された出力信号に基づいて燃料調整弁(FMV)32、燃料遮断弁(SOV)38aおよび油圧開放弁(BOV)39aの駆動指令値を算出し、それらを駆動制御するドライバ82a2、82a3、82a4、82b2、82b3、82b4に送出する。
【0041】
また、演算装置82a1、82b1はそれぞれ、入力された出力信号に基づいて各センサに異常があるか否か、およびエンジン制御に関わる機器、具体的には、燃料調整弁32や油圧開放弁39a(加えてイグニッション装置)に異常があるか否か検知する。
【0042】
センサの異常については、入力された出力信号が予め設定された所定範囲内のものでない場合、異常であると検知する。また、2個あるいは4個の冗長センサを備えるセンサ群については、各出力信号を比較し、他と一致しない出力信号のセンサを異常であると検知する。さらに、センサとCPU間の信号線の断線によってオープン信号が発せられる場合も、そのセンサは異常であると検知する。
【0043】
機器の異常については、その機器の動作を検出するセンサが正常であるとの前提のもと、機器を動作させる駆動指令値に従ってその機器が動作していない場合、異常であると検知する。また、機器とCPU間の信号線の断線によってオープン信号が発せられる場合もその機器は異常であると検知する。
【0044】
演算装置82a1、82b1はそれぞれ、各センサあるいは機器に異常があると検知されたとき、異常と検知されたセンサと機器の種類および個数に応じて予め設定された表に基づいて自己の制御系統の故障レベルを判定する。
【0045】
図3は、その故障レベルについて説明する表である。
【0046】
図示のように、各センサおよび機器に異常がない場合、その制御系統は正常であり、故障レベルは0(Level 0)に設定される。
【0047】
一方、イグニッション装置の異常が検知された場合、エンジンスタートに不具合があるとし、故障レベルを1(Level 1)と判定する。
【0048】
ファン回転数(N1)センサ(N1センサ62)あるいはコンプレッサ出口圧力(P3)センサ(P3センサ74)あるいは大気圧力(P0)センサ(P0センサ72)に異常があると検知された場合、推力制御や過渡性能が低下しているとし、故障レベルを2(Level 2)と判定する。
【0049】
また、BOV(油圧開放弁39a)の異常が検知された場合やブリードオフバルブ(BOV)センサ(油圧開放弁39aの位置センサ39c)に異常があると検知された場合やファン入口温度(T1)センサ(T1センサ68)に異常があると検知された場合、推力制御不能とし、故障レベルを3(Level 3)と判定する。
【0050】
さらに、FMV(燃料調整弁32)の異常が検知された場合やFMV開度センサ(燃料調整弁32の開度センサ32b)に異常があると検知された場合やコア回転数(N2)センサ(N2センサ64)に異常があると検知された場合、エンジン制御不能とし、故障レベルを4(Level 4)と判定する。
【0051】
このように、演算装置82a1、82b1はそれぞれ、故障の軽重に従って自己の制御系統の故障レベルを数値で判定する。
【0052】
図2の説明を続けると、2個の制御系統A、Bは公知のCAN(Controller Area Network)通信82cを介して通信自在に接続される。即ち、各々の制御系統は自己の故障レベルを他方に送信する送信手段と他方の故障レベルを受信する受信手段を備え、互いに自己の制御系統の故障レベルを他方に送信すると共に、他方の故障レベルを受信する。
【0053】
演算装置82a1、82b1はそれぞれ、自己の故障レベルと他方の故障レベルの値を比較し、自己の故障レベルの値が大きい(より不健全な)場合、自己の制御系統を不能にする信号(Channel disable信号)をNOR回路82a5、82b5に送信する。
【0054】
また、2個の制御系統A、Bには、CPU82a1、82b1から動作パルス(pulse)を受けてその異常を監視するウオッチ・ドック・モニタ(WDM(Watch Dog Monitor))82a6、82b6が備えられ、CPU82a1、82b1が異常であるときに発せられる異常信号(WDM detect信号)もNOR回路82a5、82b5に送信される。
【0055】
NOR回路82a5、82b5の出力は自己の故障判定信号であり、それぞれ後段の自己のAND回路82a7、82b7に送られると共に、互いに他方のCPU82a1、82b1にも送られる。
【0056】
AND回路82a7、82b7の出力は自己のActive/Standby判定信号であり、自己のドライバ82a2、82a4、82b2、82b4に送られると共に、NOT回路82a8、82b8を介して互いに他方のAND回路82a7、82b7にも送られる。さらには、互いに他方のCPU82a1、82b1にも送られる。AND回路82a7、82b7では、自己の故障判定信号が正常(健全)を示し、かつ他方のActive/Standby判定信号がStandby信号である場合、自己のActive/Standby判定信号としてActive信号を出力する。
【0057】
AND回路82a7、82b7からActive信号(Hレベル信号)が出力される場合、その信号が入力されるドライバ82a2、82a4、82b2、82b4では、CPU82a1、82b1によって算出されたFMV駆動指令値およびBOV駆動指令値を電流指令値に変換し、それをFMVおよびBOVに実際に出力することになる。
【0058】
逆に、AND回路82a7、82b7からStandby信号(Lレベル信号)が出力される場合、その信号が入力されるドライバ82a2、82a4、82b2、82b4では、CPU82a1、82b1によって算出されたFMV駆動指令値およびBOV駆動指令値を電流指令値に変換することなく、指令値は実際にはFMVおよびBOVに出力されないことになる。
【0059】
尚、CPU82a1、82b1によって算出されたSOV駆動指令値は、AND回路82a7、82b7からの出力によらず、ドライバ82a3、82a3で電流指令値に変換され、実際にSOVに出力される。
【0060】
以上の構成から、例えば制御系統Aにおいて、自己の制御系統の故障レベルが他方よりも小さく、かつ自己のCPU82a1に異常がなく、かつ制御系統Bがスタンバイ(Standby信号(Lレベル信号)を発する状態、即ち、指令値を出力しない状態(待機状態))にある場合、制御系統Aはアクティブ(Active信号(Hレベル信号)を発する状態、即ち、指令値を出力する状態(活動状態))となる。また、制御系統Aがアクティブであるとの情報は制御系統Bに送信される。一方、例えば制御系統Aにおいて、自己の制御系統の故障レベルが他方よりも大きい場合、スタンバイとなると共に、その情報は制御系統Bに送信される。
【0061】
図4は、各制御系統で実行される、この発明に係る航空機用ガスタービン・エンジンの制御装置の動作を示すフロー・チャートである。
【0062】
図示のように、左側のフロー・チャートは制御系統Aにおいて、右側のフロー・チャートは制御系統Bにおいてそれぞれ並行して実行される。また、これらのプログラムは所定時間、例えば10msecごとに実行される。
【0063】
まず制御系統A側のS10において、制御系統Bがアクティブであるか否か判断する。肯定される場合、S12に進んで制御系統Aをスタンバイとする。一方、否定される場合、S14に進む。
【0064】
S14においては、制御系統Aが重故障であるか否か判断する。ここでの重故障とは、ウオッチ・ドック・モニタ82a6によって制御系統AのCPU82a1が異常と判断される場合、制御系統Aの動作電力が低下した場合、あるいは故障レベル4の判定となるような重大な故障をいう。肯定される場合、S12に進んで制御系統Aをスタンバイとする。一方、否定される場合、S16に進む。
【0065】
S16においては、制御系統Aの故障レベルLAと制御系統Bの故障レベルLBの大小を比較する。故障レベルLAの方が故障レベルLBよりも大である(より不健全な)とき、肯定され、S12に進んで制御系統Aをスタンバイとする。一方、故障レベルLAの方が故障レベルLBよりも小である(より健全な)とき、否定され、S18に進んで制御系統Aをアクティブとする。尚、前記したように、制御系統Aがスタンバイであるかアクティブであるかの情報は、制御系統Bに送られる。
【0066】
制御系統Bにおいても、制御系統Aと同様なプログラム処理が実行される。以下説明すると、まずS20において、制御系統Aがアクティブであるか否か判断する。肯定される場合、S22に進んで制御系統Bをスタンバイとする。一方、否定される場合、S24に進む。
【0067】
S24においては、制御系統Bが重故障であるか否か判断する。ここでの重故障とは、ウオッチ・ドック・モニタ82b6によって制御系統BのCPU82b1が異常と判断される場合、制御系統Bの動作電力が低下した場合、あるいは故障レベル4の判定となるような重大な故障をいう。肯定される場合、S22に進んで制御系統Bをスタンバイとする。一方、否定される場合、S26に進む。
【0068】
S26においては、制御系統Bの故障レベルLBと制御系統Aの故障レベルLAの大小を比較する。故障レベルLBの方が故障レベルLAよりも大である(より不健全な)とき、肯定され、S22に進んで制御系統Bをスタンバイとする。一方、故障レベルLBの方が故障レベルLAよりも小である(より健全な)とき、否定され、S28に進んで制御系統Bをアクティブとする。尚、前記したように、制御系統Bがスタンバイであるかアクティブであるかの情報は、制御系統Aに送られる。
【0069】
上記した如く、この実施例にあっては、ガスタービン・エンジン(10)に配置された複数種のセンサ(N1センサ62、N2センサ64など)からの出力信号を入力し、前記入力された出力信号に基づいて前記エンジンの動作を複数種の機器(燃料調整弁(FMV)32、油圧開放弁(BOV)39a)を介して制御するための指令値(FMV駆動指令値、BOV駆動指令値)を算出する指令値算出部(CPU82a1、82b1)をそれぞれ有する2個の制御系統(Channel A、B)を備えると共に、前記2個の制御系統の指令値算出部のいずれかで算出された指令値を前記機器に出力し、前記エンジンの動作を制御する航空機用ガスタービン・エンジンの制御装置において、前記2個の制御系統がそれぞれ、前記入力された出力信号に基づいて前記センサと機器に異常があるか否か検知し、前記センサと機器のいずれかに異常があると検知されたとき、前記異常と検知されたセンサと機器の種類および個数に基づき、故障の軽重に従って自己の制御系統の故障レベルを数値で判定する故障レベル判定手段(CPU82a1、82b1、図3の表)と、前記判定された故障レベルを前記他方に送信する送信手段(CAN通信82c)と、前記他方の故障レベルを受信する受信手段(CAN通信82c)と、前記判定された自己の故障レベルと前記受信された他方の故障レベルを比較し、前記故障レベルの数値において小さい(より健全な)側の制御系統の指令値算出部で算出された指令値を前記機器に出力する出力手段(AND回路82a7、82b7、S16、S26)とを備える如く構成した。
【0070】
即ち、2個の制御系統の両方が故障した場合であっても、故障レベルの小さい(より健全な)側の制御系統でエンジンを制御する如く構成したので、2個の制御系統の両方が故障した場合であっても、エンジン制御を継続させることができる。
【0071】
また、前記2個の制御系統はそれぞれ、前記指令値算出部の異常を監視する監視手段(ウオッチ・ドック・モニタ(WDM(Watch Dog Monitor))82a6、82b6)を備える如く構成した。
【0072】
それにより、例えば一方の指令値算出部が監視手段によって異常と判断されたとき、その制御系統で算出された指令値を機器に出力しないようにすると共に、他方の制御系統で算出された指令値を機器に出力することで、エンジンを適切に制御することができる。
【0073】
尚、上記においては2軸のターボファン・エンジンを例にとって説明したが、ターボジェット・エンジン、その他のターボファン・エンジン、ターボプロップ・エンジンおよびターボシャフト・エンジンに対してこの発明に係る航空機用ガスタービン・エンジンの制御装置を適用しても良い。
【符号の説明】
【0074】
10 エンジン、32 燃料調整弁(FMV)、32b (FMV)開度センサ、38a 燃料遮断弁(SOV)、39a 油圧開放弁(BOV)、39c (BOV)位置センサ、62 N1センサ、64 N2センサ、68 T1センサ、70 P1センサ、72 P0センサ、74 P3センサ、76 EGTセンサ、82 ECU、82a1,82b1 CPU(指令値算出部)、82a6,82b6 ウオッチ・ドック・モニタ(監視手段)、82a7,82b7 AND回路(出力手段)、82c CAN通信(送信手段、受信手段)、A,B 制御系統
【特許請求の範囲】
【請求項1】
ガスタービン・エンジンに配置された複数種のセンサからの出力信号を入力し、前記入力された出力信号に基づいて前記エンジンの動作を複数種の機器を介して制御するための指令値を算出する指令値算出部をそれぞれ有する2個の制御系統を備えると共に、前記2個の制御系統の指令値算出部のいずれかで算出された指令値を前記機器に出力し、前記エンジンの動作を制御する航空機用ガスタービン・エンジンの制御装置において、前記2個の制御系統がそれぞれ、前記入力された出力信号に基づいて前記センサと機器に異常があるか否か検知し、前記センサと機器のいずれかに異常があると検知されたとき、前記異常と検知されたセンサと機器の種類および個数に基づき、故障の軽重に従って自己の制御系統の故障レベルを数値で判定する故障レベル判定手段と、前記判定された故障レベルを前記他方に送信する送信手段と、前記他方の故障レベルを受信する受信手段と、前記判定された自己の故障レベルと前記受信された他方の故障レベルを比較し、前記故障レベルの数値において小さい側の制御系統の指令値算出部で算出された指令値を前記機器に出力する出力手段とを備えることを特徴とする航空機用ガスタービン・エンジンの制御装置。
【請求項2】
前記2個の制御系統はそれぞれ、前記指令値算出部の異常を監視する監視手段を備えることを特徴とする請求項1記載の航空機用ガスタービン・エンジンの制御装置。
【請求項1】
ガスタービン・エンジンに配置された複数種のセンサからの出力信号を入力し、前記入力された出力信号に基づいて前記エンジンの動作を複数種の機器を介して制御するための指令値を算出する指令値算出部をそれぞれ有する2個の制御系統を備えると共に、前記2個の制御系統の指令値算出部のいずれかで算出された指令値を前記機器に出力し、前記エンジンの動作を制御する航空機用ガスタービン・エンジンの制御装置において、前記2個の制御系統がそれぞれ、前記入力された出力信号に基づいて前記センサと機器に異常があるか否か検知し、前記センサと機器のいずれかに異常があると検知されたとき、前記異常と検知されたセンサと機器の種類および個数に基づき、故障の軽重に従って自己の制御系統の故障レベルを数値で判定する故障レベル判定手段と、前記判定された故障レベルを前記他方に送信する送信手段と、前記他方の故障レベルを受信する受信手段と、前記判定された自己の故障レベルと前記受信された他方の故障レベルを比較し、前記故障レベルの数値において小さい側の制御系統の指令値算出部で算出された指令値を前記機器に出力する出力手段とを備えることを特徴とする航空機用ガスタービン・エンジンの制御装置。
【請求項2】
前記2個の制御系統はそれぞれ、前記指令値算出部の異常を監視する監視手段を備えることを特徴とする請求項1記載の航空機用ガスタービン・エンジンの制御装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2011−43135(P2011−43135A)
【公開日】平成23年3月3日(2011.3.3)
【国際特許分類】
【出願番号】特願2009−192933(P2009−192933)
【出願日】平成21年8月24日(2009.8.24)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成23年3月3日(2011.3.3)
【国際特許分類】
【出願日】平成21年8月24日(2009.8.24)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]