
航空機騒音監視方法及び航空機騒音監視装置
【課題】音響式の識別法に加えて、電波式識別法を用いた航空機騒音の識別性能を向上させる騒音監視方法を提供する。
【解決手段】航空機騒音監視装置は、飛行場周辺に設置したレーダ受信アンテナ12を通じ、受信部20により航空機からの応答信号を受信する。所定時間内で受信した応答信号は一時メモリ24に蓄積され、時間間隔分析部26により、時系列に並んだ全ての応答信号の時間間隔が算出される。ヒストグラム作成部28は、算出された時間間隔からヒストグラムを作成し、フィルタ部30は、その中で最も頻度が高い時間間隔をタイムゲートとして応答信号をフィルタリングする。
【解決手段】航空機騒音監視装置は、飛行場周辺に設置したレーダ受信アンテナ12を通じ、受信部20により航空機からの応答信号を受信する。所定時間内で受信した応答信号は一時メモリ24に蓄積され、時間間隔分析部26により、時系列に並んだ全ての応答信号の時間間隔が算出される。ヒストグラム作成部28は、算出された時間間隔からヒストグラムを作成し、フィルタ部30は、その中で最も頻度が高い時間間隔をタイムゲートとして応答信号をフィルタリングする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、航空交通管制(ATC:Air Traffic Control)における二次監視レーダ(SSR)から放射された質問信号に対して、航空機から発せられた応答信号を用いて航空機騒音を監視する方法及びその装置に関するものである。
【背景技術】
【0002】
従来、空港周辺等の航空機騒音の識別には、3軸相関法により音の到来方向(仰角及び方位角)を捉えて騒音源の航空機を特定する音響式の識別法がある(例えば、特許文献1参照。)。この音響式識別法に加えて、航空機から発せられる応答信号の電波を受信する電波式識別法を用いることにより、騒音源の識別性能をより向上することができる。
【0003】
これまでの電波式識別法では、航空機から発せられるトランスポンダ応答信号の電波強度の大きさから航空機騒音データの分析処理を行っている(例えば、特許文献2参照。)。具体的には、コンピュータに取り込んだ騒音信号の経時変化と航空機が発するトランスポンダ応答信号の電波強度の経時変化をそれぞれ表示し、そこからオペレータの判断又はプログラムの自動処理で航空機以外の不要な騒音データを削除していき、最終的に予め設定した騒音評価値への寄与の度合い以下になるまでこれらを繰り返し行う。これにより、応答信号の電波強度が大きい時に得られた騒音データは、最終的に航空機騒音であると判断することができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平7−43203号公報
【特許文献2】特開2006−138831号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述した電波式識別法は、特定の航空機が単独で飛行する測定環境下では、ある程度有効であると考えられる。しかし、観測地域で同時期に複数の航空機が飛行している場合、それぞれが独自に応答信号を発しているため、受信した応答信号の電波強度だけでは電波発信源を特定することができず、騒音源と電波発信源との照合に誤りが生じてしまうという問題がある。
【0006】
また測定環境によっては、空港設備等の遮蔽物の影響により、近傍の航空機から発せられた応答信号よりも、遠方の航空機から発せられた応答信号の電波強度が大きくなる場合がある。この場合、近傍を飛行する航空機の騒音を観測しても、同時期に受信した応答信号の電波強度が極端に弱いと、両者の照合を正しく判断することは難しくなる。あるいは、遠方を飛行する航空機から比較的強い電波強度で応答信号を受信しても、同時期にそれほど大きな騒音が観測されなければ、やはり両者の照合を正しく判断することは困難となる。
【0007】
たとえ電波強度が充分であったとしても、受信環境によっては応答信号にノイズが混じることがあり、その影響が電波発信源と騒音源との照合をさらに難しくしているという問題もある。
【0008】
そこで本発明は、音響式に加えて電波式識別法を用いた航空機騒音の識別性能を向上させることを目的とする。
【課題を解決するための手段】
【0009】
上記の課題を解決するため、本発明は以下の解決手段を採用する。
すなわち本発明は、不特定数の二次監視レーダ(SSR)から放射される質問信号に対して、不特定数の航空機から発せられた応答信号を受信し、そこから各種の演算処理を行って、特定の航空機から発せられた応答信号群のみを抽出するものである。
【0010】
一般に、二次監視レーダ等からの質問信号は、フライトごとに割り振られた機体識別コードを問い合わせる「mode A」、及び現状の高度を問い合わせる「mode C」の組み合わせを含めて放射されている。このため航空機から発せられる応答信号の電波には、高度情報(mode C)や機体識別コード(mode A)等の航空機に固有の情報が含まれている。
【0011】
ただし、飛行場周辺には不特定数の航空機が航行することがあるため、観測点で受信された応答信号には不特定数の航空機から発せられたものが無作為に含まれている。また、質問信号を放射する二次監視レーダ(SSR)が複数基ある場合、それぞれのレーダに呼応して応答信号が発せられている。
【0012】
それらの中から特定の二次監視レーダ(SSR)の質問信号に対する特定の航空機による応答信号群を抽出するため、本発明は応答信号の時間間隔に着目する。一般に、航空機から発せられる応答信号はパルス状であり、その時間間隔は質問信号の時間間隔をトレースしている。したがって、同じ時系列上では多種多様な時間間隔で応答信号が混在していても、その中で特定の二次監視レーダ(SSR)の質問信号は常に一定の時間間隔を保持していることから、その時間間隔を用いて応答信号をフィルタリングすれば、特定の二次監視レーダ(SSR)から発せられた質問信号に対する航空機から発せられた応答信号群のみを正しく抽出することが可能になる。
【0013】
本発明の航空機騒音監視装置は、受信部、時間間隔算出部、頻度算出部及びフィルタ部の構成を有する。これら構成により、本発明の航空機騒音監視方法を実行することができる。
【0014】
先ず受信部は、二次監視レーダ(SSR)からの質問信号に対して、不特定数の航空機から発せられた応答信号を受信するステップを実行する。
次に時間間隔算出部は、所定時間内に受信された複数の応答信号について、互いの時間間隔を算出するステップを実行する。
また頻度算出部は、時間間隔算出部により算出された複数通りの時間間隔について、個別の頻度を算出するステップを実行する。
そしてフィルタ部は、頻度算出部により算出された頻度が最大となる特定の時間間隔を用いて、所定時間内に受信された複数の応答信号の中から特定の応答信号群をフィルタリングするステップを実行する。
【0015】
これにより、同一の時系列上では応答信号が多種多様な時間間隔で混在していても、その中で最も頻度が高い時間間隔をおいて規則的に配列された応答信号を目的とする応答信号群として特定し、これらを正確に抽出することができる。
【0016】
上記のフィルタ部は、所定時間内に受信された複数の応答信号のうち、特定の時間間隔をおいて受信された応答信号のペアを抽出するステップをさらに実行する。
また航空機騒音監視装置は、情報算出部の構成をさらに備えている。
【0017】
フィルタ部により抽出された応答信号群は、特定の航空機から発せられた「mode A」又は「mode C」の情報である。一般に、航空機の二次監視レーダシステムで用いられる「mode A」と「mode C」の質問信号は、「A,A,C,A,A,C,・・・」のパターンか、「A,C,A,C,・・・」のパターンに分けられるため、応答信号のパターンもこれらのいずれかとなる。
【0018】
したがって、フィルタリング後の応答信号については、以下のステップを実行することで「mode A」又は「mode C」の判定が可能となる。modeの判定を行うため、航空機騒音監視装置は、モード判定部の構成を備えている。
モード判定部は、フィルタ部によるフィルタリング後の応答信号の中で、特定の時間間隔をおいて受信された応答信号のペアが互いに同じ内容である場合、これら応答信号を機体識別コード情報であると判定するステップを実行する。
【0019】
上記のように応答信号のパターンは、「A,A,C,A,A,C,・・・」又は「A,C,A,C,・・・」であるため、ペアで抽出された応答信号が同じ内容を示す場合、それは「mode A」であると容易に判定することができる。
【0020】
またモード判定部は、フィルタ部によるフィルタリング後の応答信号の中で、特定の時間間隔をおいて受信された応答信号のペアが互いに同じ内容でなく、一方の応答信号が前記機体識別コード情報であると判定済みである場合、他方の応答信号を高度情報であると判定するステップを実行する。
【0021】
すなわち、応答信号のペアが「A,C」又は「C,A」のいずれかであり、この中で既に「mode A」と判定されているものがあれば、残りは「mode C」であると容易に判定することができる。
【0022】
またモード判定部は、フィルタ部によるフィルタリング後の応答信号の中で、特定の時間間隔をおいて受信された応答信号のペアが互いに同じ内容でなく、いずれの応答信号も前記機体識別コード情報であると判定されていない場合、応答信号のペアをバッファに蓄積するステップと、蓄積されたペアの応答信号について、それぞれの内容の時間的な変化を監視し、変化が現れない方を機体識別コード情報であると判定し、変化が現れた方を高度情報であると判定するステップをさらに実行してもよい。
【0023】
通常、観測点において騒音が発生するのは、比較的低い高度で航空機が飛行しているときである。この場合、航空機は空港周辺において離着陸状態であるため、航空機の高度(mode Cの応答信号)が連続的に変化しているという特徴がある。一方の機体識別コード情報(mode Aの応答信号)は、フライトごとに一定であり、変化しないという特徴がある。したがって、変化する方を高度情報とし、変化しない方については機体識別コード情報であると容易に判定することができる。
【0024】
さらに航空機騒音監視装置は、騒音測定部及び整合部としての構成を備えてもよい。騒音測定部は、航空機を騒音源として観測点に到来した騒音を測定するステップを実行する。また整合部は、フィルタ部によるフィルタリング後の応答信号と、騒音測定部により測定された航空機騒音の結果とを整合させるステップを実行する。
【0025】
応答信号をペアにすることで、ノイズの影響を除去することができる。
また、当該時刻における応答信号の状況を精度よく把握することができる。
【発明の効果】
【0026】
以上のように本発明の航空機騒音監視方法及び航空機騒音監視装置によれば、監視対象の地域で管制用のレーダや航空機が複数(不特定数)存在していても、そこから抽出した特定の応答信号群の情報を用いて航空機騒音の識別精度を向上することができる。
【図面の簡単な説明】
【0027】
【図1】飛行場内に航空機騒音監視装置を設置した場合の一実施形態を示す概要図である。
【図2】航空機騒音監視装置の構成を概略的に示すブロック図である。
【図3】複数の航空機から発せられる応答信号のパターンを時系列で示した図である。
【図4】所定時間内に受信された全ての応答信号を時系列に並べた例を示す図である。
【図5】複数通りの時間間隔から得られたヒストグラムの例を示す図である。
【図6】タイムゲートを用いて応答信号をフィルタリングした場合の一例を示した図である。
【図7】観測ユニットにより実行される騒音監視処理の手順例を示すフローチャートである。
【図8】モード判定処理の内容を詳細に示すフローチャートである。
【図9】コードの時間的な変化傾向の分析例を示す図である。
【図10】時刻データと騒音データとを整合させた場合の例を示す図である。
【発明を実施するための形態】
【0028】
以下、本発明の実施形態について図面を参照しながら説明する。
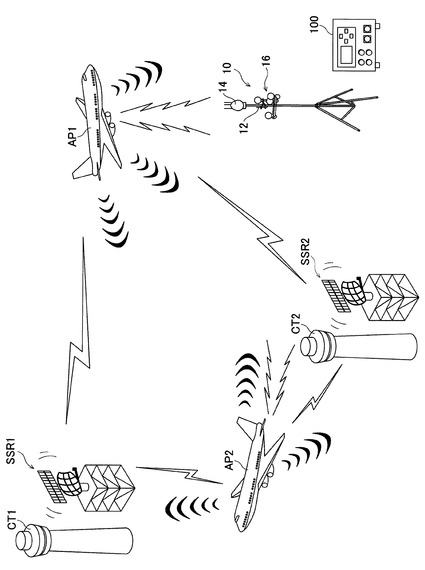
【0029】
図1は、飛行場内に航空機騒音監視装置を設置した場合の一実施形態を示す概要図である。ここで飛行場は、本実施形態において航空機騒音を監視する対象地域(測定環境)の一例である。飛行場(又はその周辺)のような対象地域においては、航空機の航行に伴って上空から航空機騒音が発生する。なお、本実施形態でいう「航空機騒音」には、航空機が離陸時又は着陸時に発する騒音(飛行騒音以外)も含まれるものとする。
【0030】
図1に示されているように、航空機騒音監視装置は、飛行場内の観測点にマイクロホン−アンテナユニット10を設置した状態で使用することができる。またマイクロホン−アンテナユニット10には、観測ユニット100が接続されている。
【0031】
〔環境条件〕
ここで、対象地域となる飛行場には、例えば複数箇所に管制塔CT1,CT2が設けられており、各管制塔CT1,CT2に付帯して、複数基の二次監視レーダSSR1,SSR2が設置されているものとする。各二次監視レーダSSR1,SSR2は、二次監視レーダ(SSR:Secondary Servayllance Rader)システムに対応した強指向性のアンテナを有している。また飛行場では、不特定数の航空機AP1
,AP2がそれぞれのフライトプランに則って航行している。
【0032】
〔質問信号〕
各二次監視レーダSSR1,SSR2は、質問信号として「mode A」及び「mode C」の電波を放射している。「mode A」は、各航空機AP1,AP2に対してATCコードあるいはスクォーク(スコーク)を問い合わせるものである。また「mode C」は、各航空機AP1,AP2に対して、現状の飛行高度を問い合わせるものである。この他に「mode S」があるが、本実施形態では「mode S」を用いないため省略する。
【0033】
〔質問信号パターン〕
一方の二次監視レーダSSR1は、例えば以下のパターンで質問信号を放射している。以下、適宜「mode A」を単に「A」、「mode C」を単に「C」と略記する。
(1)A,A,C,A,A,C,・・・
また他方の二次監視レーダSSR2は、例えば以下のパターンで質問信号を放射しているものとする。
(2)A,C,A,C,A,C,・・・
【0034】
〔ATCコード(機体識別コード情報)〕
各航空機AP1,AP2は、航空交通管制(ATC:Air Traffic Control)の二次監視レーダシステムに対応したATCトランスポンダ応答装置(以下、「応答装置」という。)を搭載している。ATCコード(ユニークコード)は航空機AP1,AP2のフライトごとに管制官により指定され、各航空機AP1,AP2の操縦士が応答装置に入力する。
【0035】
〔飛行高度〕
飛行高度を示す情報はQNE(圧力補正無しの高度)であり、これは100ft単位で更新される。QNEは地上局のコンピュータによりQNH(圧力補正された高度)に変換される。
【0036】
〔応答信号パターン〕
各航空機AP1,AP2の応答装置は、各二次監視レーダSSR1,SSR2からの質問信号(1030MHz帯)を受信すると、予め決められた遅延時間をおいて応答信号(1090MHz帯)を送信する。このとき応答信号のパターンは質問信号のパターンに合致している。
このため、一方の二次監視レーダSSR1からの質問信号に対する応答信号は以下のパターンとなる。
(1)A,A,C,A,A,C,・・・
また、他方の二次監視レーダSSR2からの質問信号に対する応答信号は以下のパターンとなる。
(2)A,C,A,C,A,C,・・・
【0037】
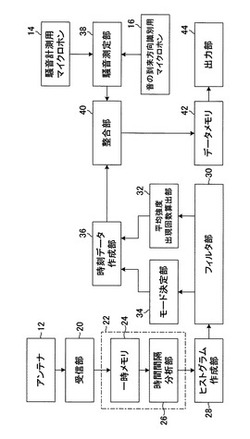
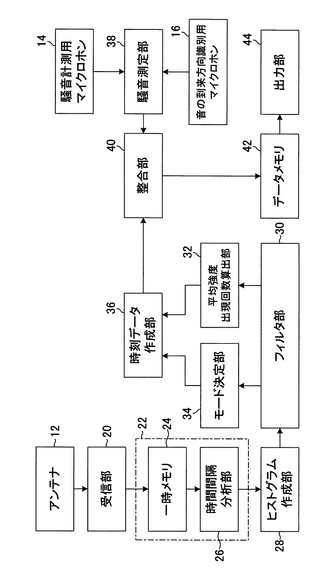
〔航空機騒音監視装置の構成〕
図2は、航空機騒音監視装置の構成を概略的に示すブロック図である。航空機騒音監視装置は、マイクロホン−アンテナユニット10のレーダ受信アンテナ12を通じて各航空機AP1,AP2から発せられる応答信号を受信することができる。また航空機騒音監視装置は、マイクロホン−アンテナユニット10の騒音計測用マイクロホン14、及び音の到来方向識別用マイクロホン16を用いて各航空機AP1,AP2に由来する航空騒音を観測することができる。
【0038】
上記の観測ユニット100は、例えば図示しない中央演算処理装置(CPU)や半導体メモリ(ROM、RAM)、ハードディスクドライブ(HDD)、入出力インタフェース、液晶ディスプレイ等を備えたコンピュータ機器で構成されている。観測ユニット100は、そのハードウェア資源をソフトウェア制御により複数の機能要素として機能させている。また複数の機能要素は、主に応答信号の処理系統と騒音測定系統とに分かれている。以下、観測ユニット100内部で実現されている機能要素について説明する。
【0039】
〔応答信号処理系統〕
応答信号処理系統には、レーダ受信アンテナ12に通じる受信部20や目的信号群抽出部22等の機能要素が含まれる。なお目的信号群抽出部22には、一時メモリ24及び時間間隔分析部26(時間間隔算出部)が含まれている。
【0040】
受信部20は、レーダ受信アンテナ12を通じて受信した応答信号(1090MHz帯)をパルス形式に復調し、所定ビット長(例えば13ビット)のフレームを生成する。生成されたフレームは、パルス形式の応答信号として一時メモリ24に蓄積される。
【0041】
一時メモリ24には、所定時間内(例えば1秒間)に受信された応答信号が時系列順に蓄積される。時間間隔分析部26は、蓄積された応答信号の全てについて相互の時間間隔を算出する。
【0042】
応答信号処理系統には、さらにヒストグラム作成部28(頻度算出部)、フィルタ部30等の機能要素が含まれている。ヒストグラム作成部28は、時間間隔分析部26で算出された複数通りの時間間隔を統計データとして、ヒストグラムを作成する。なおヒストグラムは可視的なものである必要はなく、物理メモリ空間上でヒストグラムとして認識可能なものであればよい。
【0043】
フィルタ部30は、ヒストグラム上で最も頻度が高い時間間隔をタイムゲート(篩の目)として、一時メモリ24に蓄積された応答信号から当該時間間隔でペアを作れない応答信号を除去する。これにより、タイムゲートにマッチする特定の応答信号群だけが残り、その他の応答信号は全て篩い落とされる。
【0044】
応答信号処理系統の末端部分には、モード決定部34(モード判定部)や平均強度出現回数算出部32(情報算出部)、時刻データ作成部36(データ配列作成部)等の機能要素が含まれている。モード決定部34は、フィルタリング後の応答信号群を分析し、個々の応答信号を「mode A」又は「mode C」に分類する。
【0045】
また平均強度出現回数算出部32は、フィルタリング後の応答信号群について、「mode A」又は「mode C」の内容別に電波強度の平均(平均強度)及び出現回数を算出する。
【0046】
そして時刻データ作成部36は、算出された「mode A」及び「mode C」の平均強度及び出現回数について、これらを受信時刻(例えば1秒間)ごとに配列した時刻データを作成する。
【0047】
〔騒音測定系統〕
次に騒音測定系統には、騒音計測用マイクロホン14に通じて騒音測定部38が含まれている。ここで騒音計測用マイクロホン14は、騒音計測用のマイクロホンであり、音の到来方向識別用マイクロホン16は4つのマイクロホンは3軸相関法による上空音識別用のものである。
【0048】
騒音測定部38は、3軸相関法により航空機AP1,AP2(音源)の仰角θ及び方位角δを算出し、観測点を基準とした3軸の観測空間(ベクトル空間)内で騒音の到来方向ベクトル(単位ベクトル)を算出する。また騒音測定部38は、算出した到来方向ベクトルの値(軌跡)により、観測点を基準として航空機AP1,AP2(音源)の移動方向(どの方角からどの方角へ向かったか)を算出する。そして騒音測定部38は、観測点での騒音レベルがある閾値を超えた場合(騒音イベント発生時)、その時刻と仰角θ及び方位角δを関連付けて保存する。
【0049】
〔時刻データと騒音データの整合〕
観測ユニット100には、整合部40の機能要素が含まれている。整合部40は、信号処理系統で作成された時刻データと騒音測定系統で作成された騒音データとの整合(関連付け)をとる。そして整合部40は、整合した騒音データ及び時刻データから航空機騒音が観測された時刻に対応した「mode A」及び「mode C」の情報を取得する。
【0050】
取得された情報はデータメモリ42に保存され、さらに出力部44にて出力される。出力部44は、上記の液晶ディスプレイや外部インタフェース等の構成を含む。外部インタフェースにコンピュータ等を接続することで、データメモリ42に保存された情報をコンピュータ等で利用することが可能となる。
【0051】
以上は、航空機騒音監視装置の構成例と機能についての説明であるが、以下に観測ユニット100により行われる応答信号処理について具体例を挙げて説明する。
【0052】
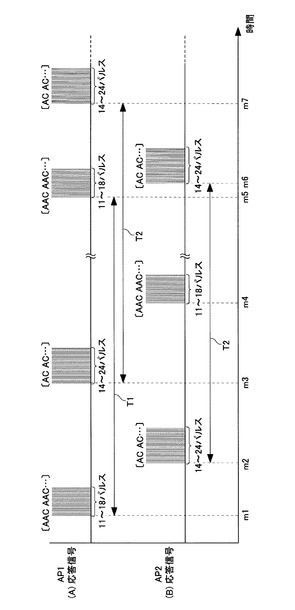
〔運用条件〕
例えば図1において、管制塔CT1の二次監視レーダSSR1は、370pps(pulse per second)でA,A,C,A,A,C,・・・のパターンの質問信号を放射しているとする。一方、管制塔CT2の二次監視レーダSSR2は、474.3ppsでA,C,A,C,・・・のパターンの質問信号を放射しているとする。
【0053】
ここで各二次監視レーダSSR1,SSR2は、東西南北の全方位(360°)をスキャンするため、非常に指向性の鋭いアンテナを3〜5秒周期で1回転させている。したがって各航空機AP1,AP2は、各二次監視レーダSSR1,SSR2のアンテナと相対した瞬間に質問信号を受信し、かつ、予め決められた時間遅れ3.5μsで応答信号を発している。
【0054】
ここで、各航空機AP1,AP2が応答する時間は、各二次監視レーダSSR1,SSR2の指向性角度と回転周期から計算することができ、一般的には、概ね30〜50msの時間内で応答することができる。つまり、二次監視レーダSSR1に対する応答数は11〜18回程度となり、二次監視レーダSSR2に対する応答数は14〜24回程度となる。
【0055】
〔応答信号送信パターン〕
図3は、上記の運用条件で航空機AP1,AP2から発せられる応答信号のパターンを時系列で示した図である。
【0056】
〔AP1−SSR1〕
例えば図3中(A)に示されているように、航空機AP1は、ある時刻m1に二次監視レーダSSR1と相対し、その瞬間から質問信号(AACAAC・・・)を有効に受信できる時間内で11〜18パルスの応答信号(AACAAC・・・)を発している。次に航空機AP1が二次監視レーダSSR1と相対するのは、回転周期T1後の時刻m5であり、この瞬間から航空機AP1は再び11〜18パルスの応答信号(AACAAC・・・)を発することになる。
【0057】
〔AP1−SSR2〕
一方で航空機AP1は、別の時刻m3に二次監視レーダSSR2とも相対し、その瞬間から質問信号(ACAC・・・)を有効に受信できる時間内で14〜24パルスの応答信号(ACAC・・・)を発する。そして、次に航空機AP1が二次監視レーダSSR2と相対するのは回転周期T2後の時刻m7であり、この瞬間から航空機AP1は再び14〜24パルスの応答信号(ACAC・・・)を発することになる。
【0058】
〔AP2−SSR2〕
別の航空機AP2については以下のようになる。
すなわち、図3中(B)に示されているように、航空機AP2は、ある時刻m2に二次監視レーダSSR2の方と相対し、その瞬間から質問信号(ACAC・・・)を有効に受信できる時間内で14〜24パルスの応答信号(ACAC・・・)を発している。そして、次に航空機AP2が二次監視レーダSSR2と相対するのは、回転周期T2後の時刻m6であり、この瞬間から航空機AP2は再び14〜24パルスの応答信号(ACAC・・・)を発することになる。
【0059】
〔AP2−SSR1〕
一方で航空機AP2は、別の時刻m4に二次監視レーダSSR1とも相対し、その瞬間から質問信号(AACAAC・・・)を有効に受信できる時間内で11〜18パルスの応答信号(AACAAC・・・)を発する。図3には示されていないが、次に航空機AP2が二次監視レーダSSR1と相対するのは回転周期T1後であり、その瞬間から航空機AP2は再び11〜18パルスの応答信号(AACAAC・・・)を発することになる。
【0060】
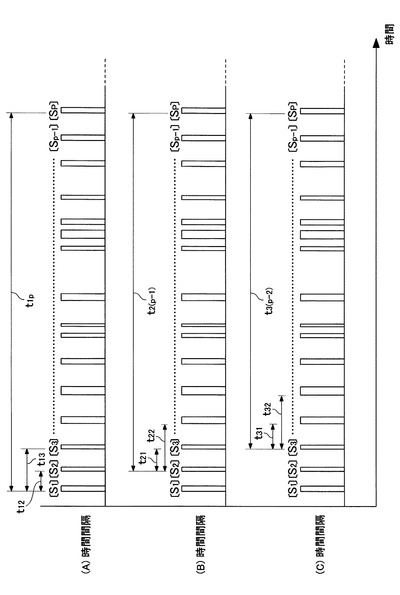
〔応答信号の配列〕
図4は、所定時間内(例えば1秒間)に受信された全ての応答信号を時系列に並べた例を示す図である。このような応答信号S1〜Spの配列は、上記の一時メモリ24に蓄積された1秒間ごとの応答信号を並べた結果(13ビットのコードと時刻、及び強度を含む)を表している。
【0061】
〔時間間隔の算出〕
上記のように時間間隔分析部26は、全ての応答信号S1〜Spについて、相互の時間間隔tmnを算出する。例えば図4中(A)に示されているように、先頭の応答信号S1であれば、他の全ての応答信号S2〜Spと(いわゆる「総当たり」)の時間間隔t12,t13,t14,・・・t1pを算出する。また図4中(B)に示されているように、2番目の応答信号S2であれば、他の全ての応答信号S1,S3〜Spとの時間間隔t21,t23,t24,・・・t2(p-1)を算出する。また図4中(C)に示されているように、3番目の応答信号S3であれば、他の全ての応答信号S1,S2,S4〜Spとの時間間隔t31,t32,t34,・・・t3(p-2)を算出する。特に図示していないが、以下同様に応答信号S4〜Spまで、全ての時間間隔tmnを算出する。
【0062】
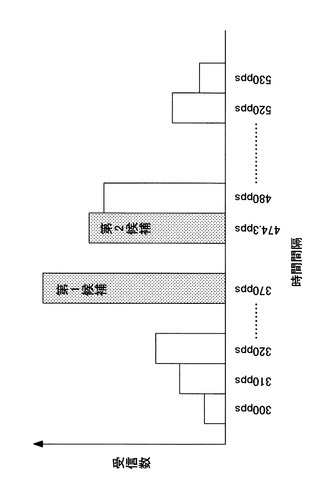
〔ヒストグラム作成〕
図5は、算出した時間間隔から得られたヒストグラムの例を示す図である。ここでは便宜上、可視化して示しているが、上記のようにヒストグラム作成部28は、メモリ空間上で認識可能なヒストグラムを作成する。また便宜上、ここでは個々の時間間隔を1秒間の受信パルス数(pps)で表している。
【0063】
〔タイムゲート決定〕
次に、得られたヒストグラムから、最も頻度が高い(受信数が多い)時間間隔tgateを算出し、この算出した時間間隔tgateをフィルタリング用のタイムゲートとする。例えば、ここでは最頻値である「370pps」がタイムゲートの第1候補となり、次に頻度が高い「474.3pps」は第2候補となる。
【0064】
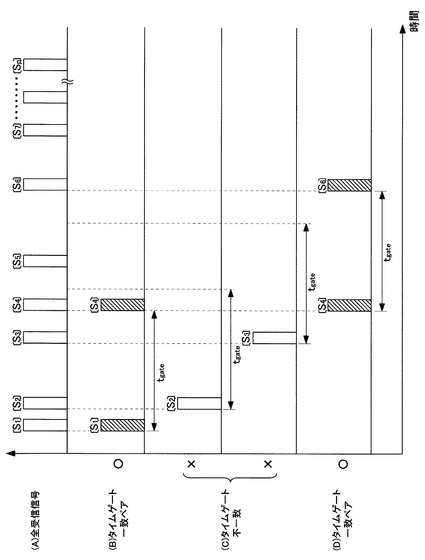
〔フィルタリング〕
図6は、タイムゲートを用いて応答信号をフィルタリングした場合の一例を示した図である。すなわち上記のフィルタ部30は、最も頻度が高い時間間隔tgateをタイムゲートとして、目的とする応答信号群をフィルタリングする。なお、仕様により第1候補と第2候補の両方を扱う場合もあるが、本実施形態では、第1候補のみを使用する。
【0065】
例えば、図6中(A)に示す1秒間に受信された全ての応答信号S1〜Spについて、図6中(B)〜(D)に示す時間間隔tgateをタイムゲートとしてペアとなり得る応答信号の組を抽出してフィルタリングすると、図6中(B),(D)に示すように、目的の応答信号群だけが残り(例えばS1,S4,S6)、図6中(C)に示すように、その他の応答信号は除去される。また応答信号をペアにすることで、ノイズを除去することができる。
【0066】
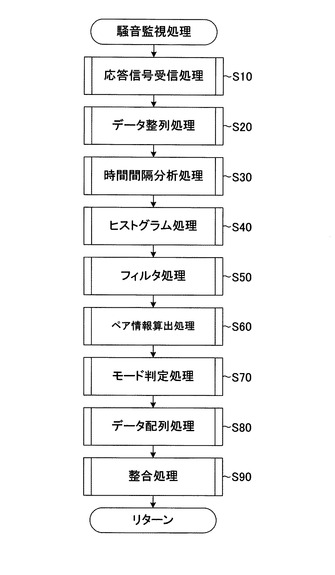
〔地上騒音観測処理〕
図7は、航空機騒音監視装置の観測ユニット100により実行される騒音監視処理の手順例を示すフローチャートである。また以下の説明により、航空機騒音監視方法に用いられる各ステップの内容が明らかとなる。なお観測ユニット100は、騒音監視処理を1秒ごとの時間割り込みで実行することができる。
【0067】
ステップS10:観測ユニット100は、受信部20において応答信号受信処理を実行する。この処理では、上記のように1秒間ごとの応答信号を受信する。
【0068】
ステップS20:次に観測ユニット100は、目的信号群抽出部22においてデータ整列処理を実行する。この処理では、受信した応答信号に時刻と強度を関連付けて一時メモリ24に蓄積し、時系列にデータを整列させる(図4)。
【0069】
ステップS30:また観測ユニット100は、時間間隔分析部26において時間間隔分析処理を実行する。この処理では、上記のように全ての応答信号S1〜Spについて、相互の時間間隔tmnを算出する(図4)。
【0070】
ステップS40:次に観測ユニット100は、ヒストグラム作成部28においてヒストグラム処理を実行する。この処理では、上記のように複数通りの時間間隔tmnからヒストグラムを作成する。
【0071】
ステップS50:そして観測ユニット100は、フィルタ部30においてフィルタ処理を実行する。この処理では、上記のように最大の頻度である時間間隔tgateを算出し、これをタイムゲートとして目的の応答信号群をフィルタリングする(図6)。このときフィルタ部30は、全ての応答信号の中から、時間間隔tgateに一致する応答信号のペアを抽出する。
【0072】
ステップS60:観測ユニット100は、平均強度出現回数算出部32においてペア情報算出処理を実行する。この処理では、フィルタリング後の応答信号のうち、内容(コード)が同じであるペアの電波強度の平均及び出現回数を算出する。
【0073】
ステップS70:また観測ユニット100は、モード決定部34において、モード判定処理を実行する。この処理では、ペアで抽出された応答信号について、それぞれ「mode A」又は「mode C」のいずれに該当するかを判定する。なおモード判定処理の詳細については、別のフローチャートを用いてさらに後述する。
【0074】
ステップS80:また観測ユニット100は、時刻データ作成部36においてデータ配列処理を実行する。この処理では、モード判定済みの応答信号について、それぞれの受信時刻と「mode A」又は「mode C」の別、電波強度及び出現回数を配列した時刻データを作成する。
【0075】
ステップS90:そして観測ユニット100は、整合部40において整合処理を実行する。この処理では、上記のように時刻データと騒音データとの整合を取り、観測された航空機騒音の「mode A」及び「mode C」の情報を取得する。
【0076】
〔モード判定処理〕
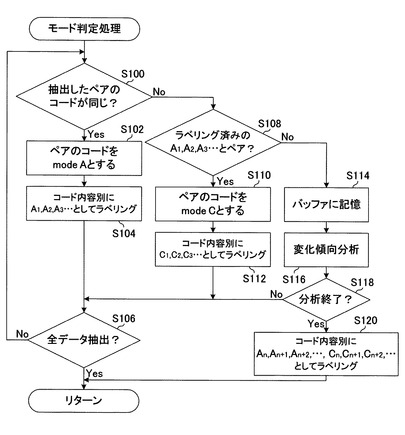
図8は、モード判定処理の内容を詳細に示すフローチャートである。観測ユニット100のモード決定部34は、以下の手順を通じてフィルタリング後の応答信号が「mode A」又は「mode C」のいずれのコードに該当するかを判定する。また適宜、判定済みの応答信号について、コードの違いにより「A1,A2,A3,・・・」又は「C1,C2,C3,・・・」等のラベリングを行う。以下、手順に沿って説明する。
【0077】
ステップS100:モード決定部34は、抽出したペアの応答信号が同じコード(例えば13ビットコード)を有するものであるかを確認する。抽出された応答信号のペアは理論上、「A,A」、「A,C」又は「C,A」のいずれかとなるため、ペアのコードが同じ場合、それは「A,A」のペアである(Yes→ステップS102へ)。
【0078】
ステップS102:したがってモード決定部34は、コードが同じペアを「mode A」と判定する。
ステップS104:またモード決定部34は、コード内容別(機体識別コード情報別)に「A1,A2,A3,・・・」としてラベリングする。ラベリングしたコードは適宜、図示しない内部メモリに保存され、必要に応じて参照することができる。
【0079】
ステップS106:この段階で、未だフィルタリング後のデータを全て抽出していなければ(No)、モード決定部34はステップS100に戻る。
ステップS100:そしてモード決定部34は、次に抽出したペアのコードが同じであるかを確認する。ペアのコードが同じでない場合(No)、モード決定部34はステップS108に進む。
【0080】
ステップS108:コードが同じでないペアは、「A,C」又は「C,A」のいずれかである。したがって、いずれか一方が「mode A」であり、既に「A1,A2,A3,・・・」としてラベリングされているものであれば、他方のコードは「mode C」である(Yes→ステップS110へ)。
【0081】
ステップS110:したがってモード決定部34は、「A1,A2,A3,・・・」とペアのコードを「mode C」と判定する。
ステップS102:そしてモード決定部34は、コードの内容別(高度情報別)に「C1,C2,C3,・・・」としてラベリングする。ラベリングしたコードは、上記のように図示しない内部メモリに保存され、必要に応じて参照することができる。
【0082】
以上のようにして、1秒間の応答信号について「A1,A2,A3,・・・」又は「C1,C2,C3,・・・」のラベリングを行い、全データを抽出し終えると(ステップS106)、モード決定部34は呼び出し元の騒音監視処理(図7)に復帰する。
【0083】
〔AC,CAの場合〕
以上のように、応答信号が「A,A,C,A,A,C・・・」のパターンであれば、コードが同じペアから「mode A」を判定し、そこから「mode C」も判定することができる。これに対し、応答信号が「A,C,A,C・・・」のパターンの場合、コードが同じペアがないため、抽出したペアから「mode A」又は「mode C」の判定を行うことができない。この場合、モード決定部34は以下の手順を実行する。
【0084】
ステップS100:すなわちモード決定部34は、新たに抽出したペアのコードが同じでないことを確認すると(No)、次にステップS108に進む。
【0085】
ステップS108:上記のように、コードが同じでないペアは、「A,C」又は「C,A」のいずれかであるが、ペアの中に「A1,A2,A3,・・・」としてラベリングされているものがないため、現段階で「mode A」又は「mode C」を判定することができない(No→ステップS114へ)。
【0086】
ステップS114:この場合、モード決定部34はペアのコードをひとまずバッファに記憶する。
ステップS116:そしてモード決定部34は、記憶したコードの時間的な変化傾向を分析する。
【0087】
ステップS118:変化傾向の分析には相当数のサンプルが必要となるので、数組程度のサンプルでは変化傾向が顕著に表れない。したがってモード決定部34は、現状のサンプル数で充分に変化傾向を分析できない場合(No)、ステップS106に進んで全データを抽出済みか確認する。未だ全データを抽出していなければ(ステップS106:No)、モード決定部34はステップS100に戻って処理を継続する。
【0088】
そして、次に抽出したペアのコードも同じでなく(ステップS100:No)、かつ、ペアの中に「A1,A2,A3,・・・」としてラベリングされているものがない場合(ステップS108:No)、モード決定部34は次のペアもバッファに記憶する。
【0089】
なお、ステップS106で1秒間の全データを抽出済みである場合(Yes)、ここで呼び出し元の騒音監視処理(図7)に復帰するが、ペアのコードが「A,C」又は「C,A」であり、ペアの中に「A1,A2,A3,・・・」としてラベリングされているものがない場合、次回の呼び出しでもステップS100(No)→ステップS108(No)→ステップS114の手順が実行される。
【0090】
このようにして、相当数のサンプルがバッファに記憶されてくると、コードの時間的な変化傾向が明らかになってくる。
【0091】
〔変化傾向分析例〕
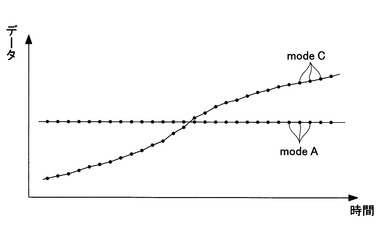
図9は、コードの時間的な変化傾向の分析例を示す図である。縦軸の「データ」は、「mode A」であれば機体識別コード情報であり、「mode C」であれば高度情報であるが、バッファに記憶した時点ではmodeが不明であるため、ひとまずペアのコードは「データ(13ビット値)」として認識される。
【0092】
ある程度のサンプル数(数組〜数十組)を時系列に記憶すると、値に変化が現れないコードが「mode A」であり、変化が現れるコードが「mode C」であると容易に判定することができる。
【0093】
〔図8:モード判定処理を参照〕
ステップS120:コードの時間的な変化傾向の分析が終了すると(ステップS118:Yes)、モード決定部34は、「mode A」及び「mode C」について、それぞれコードの内容別(機体識別コード情報別、高度情報別)に「An,An+1,An+2,・・・」、「Cn,Cn+1,Cn+2,・・・」としてラベリングする。
このようにしてラベリングを行うと、モード決定部34は呼び出し元の騒音監視処理(図7)に復帰する。
【0094】
〔データ整合例〕
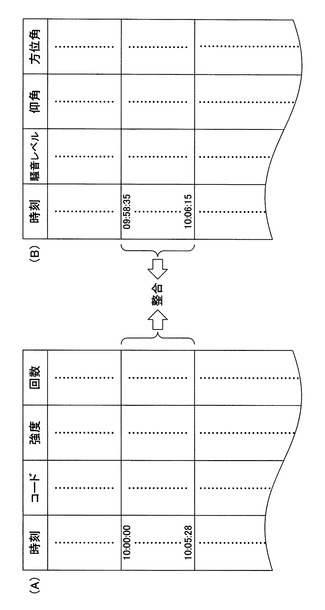
図10は、時刻データと騒音データとを整合させた場合の例を示す図である。なお、図10中(A)は時刻データの構造例を示し、図10中(B)は騒音データの構造例を示している。
【0095】
上記のように時刻データは、1秒間ごとの応答信号から作成されており、例えば「時刻」、「コード(mode A又はmode C)」、「電波強度」、「出現回数」等を配列した構造を有する。また騒音データは、上記のように騒音イベント発生時に作成され、例えば「時刻」、「仰角」、「方位角」等を配列した構造を有している。
【0096】
騒音データには、「仰角」及び「方位角」が含まれるため、これらの情報をもとに観測点からみた騒音源の到来方向を知ることができる。このとき、騒音イベントの発生時刻が合わせて記録されているため、この時刻に整合する時刻データから「mode A」及び「mode C」の情報を取得すれば、「機体識別コード情報」や「高度情報」から騒音源(航空機AP1,AP2等の固有情報)との照合の精度向上を図ることができる。
【0097】
本発明は上述した実施形態に制約されることなく、種々に変形して実施することができる。一実施形態では、飛行場を対象地域としているが、航空機騒音監視方法及び航空機騒音監視装置は、飛行場以外でも利用することができる。
【0098】
また、観測ユニット100の構成は一例であり、複数の機能要素を1つに統合したり、あるいは1つの機能要素を複数に分割して観測ユニット100を構成してもよい。
【符号の説明】
【0099】
10 マイクロホン−アンテナユニット
12 レーダ受信アンテナ
14 騒音計測用マイクロホン
16 音の到来方向識別用マイクロホン
20 受信部
22 目的信号群抽出部
24 一時メモリ
26 時間間隔分析部
28 ヒストグラム作成部
30 フィルタ部
32 平均強度出現回数算出部
34 モード決定部
36 時刻データ作成部
38 騒音測定部
40 整合部
100 観測ユニット
【技術分野】
【0001】
本発明は、航空交通管制(ATC:Air Traffic Control)における二次監視レーダ(SSR)から放射された質問信号に対して、航空機から発せられた応答信号を用いて航空機騒音を監視する方法及びその装置に関するものである。
【背景技術】
【0002】
従来、空港周辺等の航空機騒音の識別には、3軸相関法により音の到来方向(仰角及び方位角)を捉えて騒音源の航空機を特定する音響式の識別法がある(例えば、特許文献1参照。)。この音響式識別法に加えて、航空機から発せられる応答信号の電波を受信する電波式識別法を用いることにより、騒音源の識別性能をより向上することができる。
【0003】
これまでの電波式識別法では、航空機から発せられるトランスポンダ応答信号の電波強度の大きさから航空機騒音データの分析処理を行っている(例えば、特許文献2参照。)。具体的には、コンピュータに取り込んだ騒音信号の経時変化と航空機が発するトランスポンダ応答信号の電波強度の経時変化をそれぞれ表示し、そこからオペレータの判断又はプログラムの自動処理で航空機以外の不要な騒音データを削除していき、最終的に予め設定した騒音評価値への寄与の度合い以下になるまでこれらを繰り返し行う。これにより、応答信号の電波強度が大きい時に得られた騒音データは、最終的に航空機騒音であると判断することができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平7−43203号公報
【特許文献2】特開2006−138831号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述した電波式識別法は、特定の航空機が単独で飛行する測定環境下では、ある程度有効であると考えられる。しかし、観測地域で同時期に複数の航空機が飛行している場合、それぞれが独自に応答信号を発しているため、受信した応答信号の電波強度だけでは電波発信源を特定することができず、騒音源と電波発信源との照合に誤りが生じてしまうという問題がある。
【0006】
また測定環境によっては、空港設備等の遮蔽物の影響により、近傍の航空機から発せられた応答信号よりも、遠方の航空機から発せられた応答信号の電波強度が大きくなる場合がある。この場合、近傍を飛行する航空機の騒音を観測しても、同時期に受信した応答信号の電波強度が極端に弱いと、両者の照合を正しく判断することは難しくなる。あるいは、遠方を飛行する航空機から比較的強い電波強度で応答信号を受信しても、同時期にそれほど大きな騒音が観測されなければ、やはり両者の照合を正しく判断することは困難となる。
【0007】
たとえ電波強度が充分であったとしても、受信環境によっては応答信号にノイズが混じることがあり、その影響が電波発信源と騒音源との照合をさらに難しくしているという問題もある。
【0008】
そこで本発明は、音響式に加えて電波式識別法を用いた航空機騒音の識別性能を向上させることを目的とする。
【課題を解決するための手段】
【0009】
上記の課題を解決するため、本発明は以下の解決手段を採用する。
すなわち本発明は、不特定数の二次監視レーダ(SSR)から放射される質問信号に対して、不特定数の航空機から発せられた応答信号を受信し、そこから各種の演算処理を行って、特定の航空機から発せられた応答信号群のみを抽出するものである。
【0010】
一般に、二次監視レーダ等からの質問信号は、フライトごとに割り振られた機体識別コードを問い合わせる「mode A」、及び現状の高度を問い合わせる「mode C」の組み合わせを含めて放射されている。このため航空機から発せられる応答信号の電波には、高度情報(mode C)や機体識別コード(mode A)等の航空機に固有の情報が含まれている。
【0011】
ただし、飛行場周辺には不特定数の航空機が航行することがあるため、観測点で受信された応答信号には不特定数の航空機から発せられたものが無作為に含まれている。また、質問信号を放射する二次監視レーダ(SSR)が複数基ある場合、それぞれのレーダに呼応して応答信号が発せられている。
【0012】
それらの中から特定の二次監視レーダ(SSR)の質問信号に対する特定の航空機による応答信号群を抽出するため、本発明は応答信号の時間間隔に着目する。一般に、航空機から発せられる応答信号はパルス状であり、その時間間隔は質問信号の時間間隔をトレースしている。したがって、同じ時系列上では多種多様な時間間隔で応答信号が混在していても、その中で特定の二次監視レーダ(SSR)の質問信号は常に一定の時間間隔を保持していることから、その時間間隔を用いて応答信号をフィルタリングすれば、特定の二次監視レーダ(SSR)から発せられた質問信号に対する航空機から発せられた応答信号群のみを正しく抽出することが可能になる。
【0013】
本発明の航空機騒音監視装置は、受信部、時間間隔算出部、頻度算出部及びフィルタ部の構成を有する。これら構成により、本発明の航空機騒音監視方法を実行することができる。
【0014】
先ず受信部は、二次監視レーダ(SSR)からの質問信号に対して、不特定数の航空機から発せられた応答信号を受信するステップを実行する。
次に時間間隔算出部は、所定時間内に受信された複数の応答信号について、互いの時間間隔を算出するステップを実行する。
また頻度算出部は、時間間隔算出部により算出された複数通りの時間間隔について、個別の頻度を算出するステップを実行する。
そしてフィルタ部は、頻度算出部により算出された頻度が最大となる特定の時間間隔を用いて、所定時間内に受信された複数の応答信号の中から特定の応答信号群をフィルタリングするステップを実行する。
【0015】
これにより、同一の時系列上では応答信号が多種多様な時間間隔で混在していても、その中で最も頻度が高い時間間隔をおいて規則的に配列された応答信号を目的とする応答信号群として特定し、これらを正確に抽出することができる。
【0016】
上記のフィルタ部は、所定時間内に受信された複数の応答信号のうち、特定の時間間隔をおいて受信された応答信号のペアを抽出するステップをさらに実行する。
また航空機騒音監視装置は、情報算出部の構成をさらに備えている。
【0017】
フィルタ部により抽出された応答信号群は、特定の航空機から発せられた「mode A」又は「mode C」の情報である。一般に、航空機の二次監視レーダシステムで用いられる「mode A」と「mode C」の質問信号は、「A,A,C,A,A,C,・・・」のパターンか、「A,C,A,C,・・・」のパターンに分けられるため、応答信号のパターンもこれらのいずれかとなる。
【0018】
したがって、フィルタリング後の応答信号については、以下のステップを実行することで「mode A」又は「mode C」の判定が可能となる。modeの判定を行うため、航空機騒音監視装置は、モード判定部の構成を備えている。
モード判定部は、フィルタ部によるフィルタリング後の応答信号の中で、特定の時間間隔をおいて受信された応答信号のペアが互いに同じ内容である場合、これら応答信号を機体識別コード情報であると判定するステップを実行する。
【0019】
上記のように応答信号のパターンは、「A,A,C,A,A,C,・・・」又は「A,C,A,C,・・・」であるため、ペアで抽出された応答信号が同じ内容を示す場合、それは「mode A」であると容易に判定することができる。
【0020】
またモード判定部は、フィルタ部によるフィルタリング後の応答信号の中で、特定の時間間隔をおいて受信された応答信号のペアが互いに同じ内容でなく、一方の応答信号が前記機体識別コード情報であると判定済みである場合、他方の応答信号を高度情報であると判定するステップを実行する。
【0021】
すなわち、応答信号のペアが「A,C」又は「C,A」のいずれかであり、この中で既に「mode A」と判定されているものがあれば、残りは「mode C」であると容易に判定することができる。
【0022】
またモード判定部は、フィルタ部によるフィルタリング後の応答信号の中で、特定の時間間隔をおいて受信された応答信号のペアが互いに同じ内容でなく、いずれの応答信号も前記機体識別コード情報であると判定されていない場合、応答信号のペアをバッファに蓄積するステップと、蓄積されたペアの応答信号について、それぞれの内容の時間的な変化を監視し、変化が現れない方を機体識別コード情報であると判定し、変化が現れた方を高度情報であると判定するステップをさらに実行してもよい。
【0023】
通常、観測点において騒音が発生するのは、比較的低い高度で航空機が飛行しているときである。この場合、航空機は空港周辺において離着陸状態であるため、航空機の高度(mode Cの応答信号)が連続的に変化しているという特徴がある。一方の機体識別コード情報(mode Aの応答信号)は、フライトごとに一定であり、変化しないという特徴がある。したがって、変化する方を高度情報とし、変化しない方については機体識別コード情報であると容易に判定することができる。
【0024】
さらに航空機騒音監視装置は、騒音測定部及び整合部としての構成を備えてもよい。騒音測定部は、航空機を騒音源として観測点に到来した騒音を測定するステップを実行する。また整合部は、フィルタ部によるフィルタリング後の応答信号と、騒音測定部により測定された航空機騒音の結果とを整合させるステップを実行する。
【0025】
応答信号をペアにすることで、ノイズの影響を除去することができる。
また、当該時刻における応答信号の状況を精度よく把握することができる。
【発明の効果】
【0026】
以上のように本発明の航空機騒音監視方法及び航空機騒音監視装置によれば、監視対象の地域で管制用のレーダや航空機が複数(不特定数)存在していても、そこから抽出した特定の応答信号群の情報を用いて航空機騒音の識別精度を向上することができる。
【図面の簡単な説明】
【0027】
【図1】飛行場内に航空機騒音監視装置を設置した場合の一実施形態を示す概要図である。
【図2】航空機騒音監視装置の構成を概略的に示すブロック図である。
【図3】複数の航空機から発せられる応答信号のパターンを時系列で示した図である。
【図4】所定時間内に受信された全ての応答信号を時系列に並べた例を示す図である。
【図5】複数通りの時間間隔から得られたヒストグラムの例を示す図である。
【図6】タイムゲートを用いて応答信号をフィルタリングした場合の一例を示した図である。
【図7】観測ユニットにより実行される騒音監視処理の手順例を示すフローチャートである。
【図8】モード判定処理の内容を詳細に示すフローチャートである。
【図9】コードの時間的な変化傾向の分析例を示す図である。
【図10】時刻データと騒音データとを整合させた場合の例を示す図である。
【発明を実施するための形態】
【0028】
以下、本発明の実施形態について図面を参照しながら説明する。
【0029】
図1は、飛行場内に航空機騒音監視装置を設置した場合の一実施形態を示す概要図である。ここで飛行場は、本実施形態において航空機騒音を監視する対象地域(測定環境)の一例である。飛行場(又はその周辺)のような対象地域においては、航空機の航行に伴って上空から航空機騒音が発生する。なお、本実施形態でいう「航空機騒音」には、航空機が離陸時又は着陸時に発する騒音(飛行騒音以外)も含まれるものとする。
【0030】
図1に示されているように、航空機騒音監視装置は、飛行場内の観測点にマイクロホン−アンテナユニット10を設置した状態で使用することができる。またマイクロホン−アンテナユニット10には、観測ユニット100が接続されている。
【0031】
〔環境条件〕
ここで、対象地域となる飛行場には、例えば複数箇所に管制塔CT1,CT2が設けられており、各管制塔CT1,CT2に付帯して、複数基の二次監視レーダSSR1,SSR2が設置されているものとする。各二次監視レーダSSR1,SSR2は、二次監視レーダ(SSR:Secondary Servayllance Rader)システムに対応した強指向性のアンテナを有している。また飛行場では、不特定数の航空機AP1
,AP2がそれぞれのフライトプランに則って航行している。
【0032】
〔質問信号〕
各二次監視レーダSSR1,SSR2は、質問信号として「mode A」及び「mode C」の電波を放射している。「mode A」は、各航空機AP1,AP2に対してATCコードあるいはスクォーク(スコーク)を問い合わせるものである。また「mode C」は、各航空機AP1,AP2に対して、現状の飛行高度を問い合わせるものである。この他に「mode S」があるが、本実施形態では「mode S」を用いないため省略する。
【0033】
〔質問信号パターン〕
一方の二次監視レーダSSR1は、例えば以下のパターンで質問信号を放射している。以下、適宜「mode A」を単に「A」、「mode C」を単に「C」と略記する。
(1)A,A,C,A,A,C,・・・
また他方の二次監視レーダSSR2は、例えば以下のパターンで質問信号を放射しているものとする。
(2)A,C,A,C,A,C,・・・
【0034】
〔ATCコード(機体識別コード情報)〕
各航空機AP1,AP2は、航空交通管制(ATC:Air Traffic Control)の二次監視レーダシステムに対応したATCトランスポンダ応答装置(以下、「応答装置」という。)を搭載している。ATCコード(ユニークコード)は航空機AP1,AP2のフライトごとに管制官により指定され、各航空機AP1,AP2の操縦士が応答装置に入力する。
【0035】
〔飛行高度〕
飛行高度を示す情報はQNE(圧力補正無しの高度)であり、これは100ft単位で更新される。QNEは地上局のコンピュータによりQNH(圧力補正された高度)に変換される。
【0036】
〔応答信号パターン〕
各航空機AP1,AP2の応答装置は、各二次監視レーダSSR1,SSR2からの質問信号(1030MHz帯)を受信すると、予め決められた遅延時間をおいて応答信号(1090MHz帯)を送信する。このとき応答信号のパターンは質問信号のパターンに合致している。
このため、一方の二次監視レーダSSR1からの質問信号に対する応答信号は以下のパターンとなる。
(1)A,A,C,A,A,C,・・・
また、他方の二次監視レーダSSR2からの質問信号に対する応答信号は以下のパターンとなる。
(2)A,C,A,C,A,C,・・・
【0037】
〔航空機騒音監視装置の構成〕
図2は、航空機騒音監視装置の構成を概略的に示すブロック図である。航空機騒音監視装置は、マイクロホン−アンテナユニット10のレーダ受信アンテナ12を通じて各航空機AP1,AP2から発せられる応答信号を受信することができる。また航空機騒音監視装置は、マイクロホン−アンテナユニット10の騒音計測用マイクロホン14、及び音の到来方向識別用マイクロホン16を用いて各航空機AP1,AP2に由来する航空騒音を観測することができる。
【0038】
上記の観測ユニット100は、例えば図示しない中央演算処理装置(CPU)や半導体メモリ(ROM、RAM)、ハードディスクドライブ(HDD)、入出力インタフェース、液晶ディスプレイ等を備えたコンピュータ機器で構成されている。観測ユニット100は、そのハードウェア資源をソフトウェア制御により複数の機能要素として機能させている。また複数の機能要素は、主に応答信号の処理系統と騒音測定系統とに分かれている。以下、観測ユニット100内部で実現されている機能要素について説明する。
【0039】
〔応答信号処理系統〕
応答信号処理系統には、レーダ受信アンテナ12に通じる受信部20や目的信号群抽出部22等の機能要素が含まれる。なお目的信号群抽出部22には、一時メモリ24及び時間間隔分析部26(時間間隔算出部)が含まれている。
【0040】
受信部20は、レーダ受信アンテナ12を通じて受信した応答信号(1090MHz帯)をパルス形式に復調し、所定ビット長(例えば13ビット)のフレームを生成する。生成されたフレームは、パルス形式の応答信号として一時メモリ24に蓄積される。
【0041】
一時メモリ24には、所定時間内(例えば1秒間)に受信された応答信号が時系列順に蓄積される。時間間隔分析部26は、蓄積された応答信号の全てについて相互の時間間隔を算出する。
【0042】
応答信号処理系統には、さらにヒストグラム作成部28(頻度算出部)、フィルタ部30等の機能要素が含まれている。ヒストグラム作成部28は、時間間隔分析部26で算出された複数通りの時間間隔を統計データとして、ヒストグラムを作成する。なおヒストグラムは可視的なものである必要はなく、物理メモリ空間上でヒストグラムとして認識可能なものであればよい。
【0043】
フィルタ部30は、ヒストグラム上で最も頻度が高い時間間隔をタイムゲート(篩の目)として、一時メモリ24に蓄積された応答信号から当該時間間隔でペアを作れない応答信号を除去する。これにより、タイムゲートにマッチする特定の応答信号群だけが残り、その他の応答信号は全て篩い落とされる。
【0044】
応答信号処理系統の末端部分には、モード決定部34(モード判定部)や平均強度出現回数算出部32(情報算出部)、時刻データ作成部36(データ配列作成部)等の機能要素が含まれている。モード決定部34は、フィルタリング後の応答信号群を分析し、個々の応答信号を「mode A」又は「mode C」に分類する。
【0045】
また平均強度出現回数算出部32は、フィルタリング後の応答信号群について、「mode A」又は「mode C」の内容別に電波強度の平均(平均強度)及び出現回数を算出する。
【0046】
そして時刻データ作成部36は、算出された「mode A」及び「mode C」の平均強度及び出現回数について、これらを受信時刻(例えば1秒間)ごとに配列した時刻データを作成する。
【0047】
〔騒音測定系統〕
次に騒音測定系統には、騒音計測用マイクロホン14に通じて騒音測定部38が含まれている。ここで騒音計測用マイクロホン14は、騒音計測用のマイクロホンであり、音の到来方向識別用マイクロホン16は4つのマイクロホンは3軸相関法による上空音識別用のものである。
【0048】
騒音測定部38は、3軸相関法により航空機AP1,AP2(音源)の仰角θ及び方位角δを算出し、観測点を基準とした3軸の観測空間(ベクトル空間)内で騒音の到来方向ベクトル(単位ベクトル)を算出する。また騒音測定部38は、算出した到来方向ベクトルの値(軌跡)により、観測点を基準として航空機AP1,AP2(音源)の移動方向(どの方角からどの方角へ向かったか)を算出する。そして騒音測定部38は、観測点での騒音レベルがある閾値を超えた場合(騒音イベント発生時)、その時刻と仰角θ及び方位角δを関連付けて保存する。
【0049】
〔時刻データと騒音データの整合〕
観測ユニット100には、整合部40の機能要素が含まれている。整合部40は、信号処理系統で作成された時刻データと騒音測定系統で作成された騒音データとの整合(関連付け)をとる。そして整合部40は、整合した騒音データ及び時刻データから航空機騒音が観測された時刻に対応した「mode A」及び「mode C」の情報を取得する。
【0050】
取得された情報はデータメモリ42に保存され、さらに出力部44にて出力される。出力部44は、上記の液晶ディスプレイや外部インタフェース等の構成を含む。外部インタフェースにコンピュータ等を接続することで、データメモリ42に保存された情報をコンピュータ等で利用することが可能となる。
【0051】
以上は、航空機騒音監視装置の構成例と機能についての説明であるが、以下に観測ユニット100により行われる応答信号処理について具体例を挙げて説明する。
【0052】
〔運用条件〕
例えば図1において、管制塔CT1の二次監視レーダSSR1は、370pps(pulse per second)でA,A,C,A,A,C,・・・のパターンの質問信号を放射しているとする。一方、管制塔CT2の二次監視レーダSSR2は、474.3ppsでA,C,A,C,・・・のパターンの質問信号を放射しているとする。
【0053】
ここで各二次監視レーダSSR1,SSR2は、東西南北の全方位(360°)をスキャンするため、非常に指向性の鋭いアンテナを3〜5秒周期で1回転させている。したがって各航空機AP1,AP2は、各二次監視レーダSSR1,SSR2のアンテナと相対した瞬間に質問信号を受信し、かつ、予め決められた時間遅れ3.5μsで応答信号を発している。
【0054】
ここで、各航空機AP1,AP2が応答する時間は、各二次監視レーダSSR1,SSR2の指向性角度と回転周期から計算することができ、一般的には、概ね30〜50msの時間内で応答することができる。つまり、二次監視レーダSSR1に対する応答数は11〜18回程度となり、二次監視レーダSSR2に対する応答数は14〜24回程度となる。
【0055】
〔応答信号送信パターン〕
図3は、上記の運用条件で航空機AP1,AP2から発せられる応答信号のパターンを時系列で示した図である。
【0056】
〔AP1−SSR1〕
例えば図3中(A)に示されているように、航空機AP1は、ある時刻m1に二次監視レーダSSR1と相対し、その瞬間から質問信号(AACAAC・・・)を有効に受信できる時間内で11〜18パルスの応答信号(AACAAC・・・)を発している。次に航空機AP1が二次監視レーダSSR1と相対するのは、回転周期T1後の時刻m5であり、この瞬間から航空機AP1は再び11〜18パルスの応答信号(AACAAC・・・)を発することになる。
【0057】
〔AP1−SSR2〕
一方で航空機AP1は、別の時刻m3に二次監視レーダSSR2とも相対し、その瞬間から質問信号(ACAC・・・)を有効に受信できる時間内で14〜24パルスの応答信号(ACAC・・・)を発する。そして、次に航空機AP1が二次監視レーダSSR2と相対するのは回転周期T2後の時刻m7であり、この瞬間から航空機AP1は再び14〜24パルスの応答信号(ACAC・・・)を発することになる。
【0058】
〔AP2−SSR2〕
別の航空機AP2については以下のようになる。
すなわち、図3中(B)に示されているように、航空機AP2は、ある時刻m2に二次監視レーダSSR2の方と相対し、その瞬間から質問信号(ACAC・・・)を有効に受信できる時間内で14〜24パルスの応答信号(ACAC・・・)を発している。そして、次に航空機AP2が二次監視レーダSSR2と相対するのは、回転周期T2後の時刻m6であり、この瞬間から航空機AP2は再び14〜24パルスの応答信号(ACAC・・・)を発することになる。
【0059】
〔AP2−SSR1〕
一方で航空機AP2は、別の時刻m4に二次監視レーダSSR1とも相対し、その瞬間から質問信号(AACAAC・・・)を有効に受信できる時間内で11〜18パルスの応答信号(AACAAC・・・)を発する。図3には示されていないが、次に航空機AP2が二次監視レーダSSR1と相対するのは回転周期T1後であり、その瞬間から航空機AP2は再び11〜18パルスの応答信号(AACAAC・・・)を発することになる。
【0060】
〔応答信号の配列〕
図4は、所定時間内(例えば1秒間)に受信された全ての応答信号を時系列に並べた例を示す図である。このような応答信号S1〜Spの配列は、上記の一時メモリ24に蓄積された1秒間ごとの応答信号を並べた結果(13ビットのコードと時刻、及び強度を含む)を表している。
【0061】
〔時間間隔の算出〕
上記のように時間間隔分析部26は、全ての応答信号S1〜Spについて、相互の時間間隔tmnを算出する。例えば図4中(A)に示されているように、先頭の応答信号S1であれば、他の全ての応答信号S2〜Spと(いわゆる「総当たり」)の時間間隔t12,t13,t14,・・・t1pを算出する。また図4中(B)に示されているように、2番目の応答信号S2であれば、他の全ての応答信号S1,S3〜Spとの時間間隔t21,t23,t24,・・・t2(p-1)を算出する。また図4中(C)に示されているように、3番目の応答信号S3であれば、他の全ての応答信号S1,S2,S4〜Spとの時間間隔t31,t32,t34,・・・t3(p-2)を算出する。特に図示していないが、以下同様に応答信号S4〜Spまで、全ての時間間隔tmnを算出する。
【0062】
〔ヒストグラム作成〕
図5は、算出した時間間隔から得られたヒストグラムの例を示す図である。ここでは便宜上、可視化して示しているが、上記のようにヒストグラム作成部28は、メモリ空間上で認識可能なヒストグラムを作成する。また便宜上、ここでは個々の時間間隔を1秒間の受信パルス数(pps)で表している。
【0063】
〔タイムゲート決定〕
次に、得られたヒストグラムから、最も頻度が高い(受信数が多い)時間間隔tgateを算出し、この算出した時間間隔tgateをフィルタリング用のタイムゲートとする。例えば、ここでは最頻値である「370pps」がタイムゲートの第1候補となり、次に頻度が高い「474.3pps」は第2候補となる。
【0064】
〔フィルタリング〕
図6は、タイムゲートを用いて応答信号をフィルタリングした場合の一例を示した図である。すなわち上記のフィルタ部30は、最も頻度が高い時間間隔tgateをタイムゲートとして、目的とする応答信号群をフィルタリングする。なお、仕様により第1候補と第2候補の両方を扱う場合もあるが、本実施形態では、第1候補のみを使用する。
【0065】
例えば、図6中(A)に示す1秒間に受信された全ての応答信号S1〜Spについて、図6中(B)〜(D)に示す時間間隔tgateをタイムゲートとしてペアとなり得る応答信号の組を抽出してフィルタリングすると、図6中(B),(D)に示すように、目的の応答信号群だけが残り(例えばS1,S4,S6)、図6中(C)に示すように、その他の応答信号は除去される。また応答信号をペアにすることで、ノイズを除去することができる。
【0066】
〔地上騒音観測処理〕
図7は、航空機騒音監視装置の観測ユニット100により実行される騒音監視処理の手順例を示すフローチャートである。また以下の説明により、航空機騒音監視方法に用いられる各ステップの内容が明らかとなる。なお観測ユニット100は、騒音監視処理を1秒ごとの時間割り込みで実行することができる。
【0067】
ステップS10:観測ユニット100は、受信部20において応答信号受信処理を実行する。この処理では、上記のように1秒間ごとの応答信号を受信する。
【0068】
ステップS20:次に観測ユニット100は、目的信号群抽出部22においてデータ整列処理を実行する。この処理では、受信した応答信号に時刻と強度を関連付けて一時メモリ24に蓄積し、時系列にデータを整列させる(図4)。
【0069】
ステップS30:また観測ユニット100は、時間間隔分析部26において時間間隔分析処理を実行する。この処理では、上記のように全ての応答信号S1〜Spについて、相互の時間間隔tmnを算出する(図4)。
【0070】
ステップS40:次に観測ユニット100は、ヒストグラム作成部28においてヒストグラム処理を実行する。この処理では、上記のように複数通りの時間間隔tmnからヒストグラムを作成する。
【0071】
ステップS50:そして観測ユニット100は、フィルタ部30においてフィルタ処理を実行する。この処理では、上記のように最大の頻度である時間間隔tgateを算出し、これをタイムゲートとして目的の応答信号群をフィルタリングする(図6)。このときフィルタ部30は、全ての応答信号の中から、時間間隔tgateに一致する応答信号のペアを抽出する。
【0072】
ステップS60:観測ユニット100は、平均強度出現回数算出部32においてペア情報算出処理を実行する。この処理では、フィルタリング後の応答信号のうち、内容(コード)が同じであるペアの電波強度の平均及び出現回数を算出する。
【0073】
ステップS70:また観測ユニット100は、モード決定部34において、モード判定処理を実行する。この処理では、ペアで抽出された応答信号について、それぞれ「mode A」又は「mode C」のいずれに該当するかを判定する。なおモード判定処理の詳細については、別のフローチャートを用いてさらに後述する。
【0074】
ステップS80:また観測ユニット100は、時刻データ作成部36においてデータ配列処理を実行する。この処理では、モード判定済みの応答信号について、それぞれの受信時刻と「mode A」又は「mode C」の別、電波強度及び出現回数を配列した時刻データを作成する。
【0075】
ステップS90:そして観測ユニット100は、整合部40において整合処理を実行する。この処理では、上記のように時刻データと騒音データとの整合を取り、観測された航空機騒音の「mode A」及び「mode C」の情報を取得する。
【0076】
〔モード判定処理〕
図8は、モード判定処理の内容を詳細に示すフローチャートである。観測ユニット100のモード決定部34は、以下の手順を通じてフィルタリング後の応答信号が「mode A」又は「mode C」のいずれのコードに該当するかを判定する。また適宜、判定済みの応答信号について、コードの違いにより「A1,A2,A3,・・・」又は「C1,C2,C3,・・・」等のラベリングを行う。以下、手順に沿って説明する。
【0077】
ステップS100:モード決定部34は、抽出したペアの応答信号が同じコード(例えば13ビットコード)を有するものであるかを確認する。抽出された応答信号のペアは理論上、「A,A」、「A,C」又は「C,A」のいずれかとなるため、ペアのコードが同じ場合、それは「A,A」のペアである(Yes→ステップS102へ)。
【0078】
ステップS102:したがってモード決定部34は、コードが同じペアを「mode A」と判定する。
ステップS104:またモード決定部34は、コード内容別(機体識別コード情報別)に「A1,A2,A3,・・・」としてラベリングする。ラベリングしたコードは適宜、図示しない内部メモリに保存され、必要に応じて参照することができる。
【0079】
ステップS106:この段階で、未だフィルタリング後のデータを全て抽出していなければ(No)、モード決定部34はステップS100に戻る。
ステップS100:そしてモード決定部34は、次に抽出したペアのコードが同じであるかを確認する。ペアのコードが同じでない場合(No)、モード決定部34はステップS108に進む。
【0080】
ステップS108:コードが同じでないペアは、「A,C」又は「C,A」のいずれかである。したがって、いずれか一方が「mode A」であり、既に「A1,A2,A3,・・・」としてラベリングされているものであれば、他方のコードは「mode C」である(Yes→ステップS110へ)。
【0081】
ステップS110:したがってモード決定部34は、「A1,A2,A3,・・・」とペアのコードを「mode C」と判定する。
ステップS102:そしてモード決定部34は、コードの内容別(高度情報別)に「C1,C2,C3,・・・」としてラベリングする。ラベリングしたコードは、上記のように図示しない内部メモリに保存され、必要に応じて参照することができる。
【0082】
以上のようにして、1秒間の応答信号について「A1,A2,A3,・・・」又は「C1,C2,C3,・・・」のラベリングを行い、全データを抽出し終えると(ステップS106)、モード決定部34は呼び出し元の騒音監視処理(図7)に復帰する。
【0083】
〔AC,CAの場合〕
以上のように、応答信号が「A,A,C,A,A,C・・・」のパターンであれば、コードが同じペアから「mode A」を判定し、そこから「mode C」も判定することができる。これに対し、応答信号が「A,C,A,C・・・」のパターンの場合、コードが同じペアがないため、抽出したペアから「mode A」又は「mode C」の判定を行うことができない。この場合、モード決定部34は以下の手順を実行する。
【0084】
ステップS100:すなわちモード決定部34は、新たに抽出したペアのコードが同じでないことを確認すると(No)、次にステップS108に進む。
【0085】
ステップS108:上記のように、コードが同じでないペアは、「A,C」又は「C,A」のいずれかであるが、ペアの中に「A1,A2,A3,・・・」としてラベリングされているものがないため、現段階で「mode A」又は「mode C」を判定することができない(No→ステップS114へ)。
【0086】
ステップS114:この場合、モード決定部34はペアのコードをひとまずバッファに記憶する。
ステップS116:そしてモード決定部34は、記憶したコードの時間的な変化傾向を分析する。
【0087】
ステップS118:変化傾向の分析には相当数のサンプルが必要となるので、数組程度のサンプルでは変化傾向が顕著に表れない。したがってモード決定部34は、現状のサンプル数で充分に変化傾向を分析できない場合(No)、ステップS106に進んで全データを抽出済みか確認する。未だ全データを抽出していなければ(ステップS106:No)、モード決定部34はステップS100に戻って処理を継続する。
【0088】
そして、次に抽出したペアのコードも同じでなく(ステップS100:No)、かつ、ペアの中に「A1,A2,A3,・・・」としてラベリングされているものがない場合(ステップS108:No)、モード決定部34は次のペアもバッファに記憶する。
【0089】
なお、ステップS106で1秒間の全データを抽出済みである場合(Yes)、ここで呼び出し元の騒音監視処理(図7)に復帰するが、ペアのコードが「A,C」又は「C,A」であり、ペアの中に「A1,A2,A3,・・・」としてラベリングされているものがない場合、次回の呼び出しでもステップS100(No)→ステップS108(No)→ステップS114の手順が実行される。
【0090】
このようにして、相当数のサンプルがバッファに記憶されてくると、コードの時間的な変化傾向が明らかになってくる。
【0091】
〔変化傾向分析例〕
図9は、コードの時間的な変化傾向の分析例を示す図である。縦軸の「データ」は、「mode A」であれば機体識別コード情報であり、「mode C」であれば高度情報であるが、バッファに記憶した時点ではmodeが不明であるため、ひとまずペアのコードは「データ(13ビット値)」として認識される。
【0092】
ある程度のサンプル数(数組〜数十組)を時系列に記憶すると、値に変化が現れないコードが「mode A」であり、変化が現れるコードが「mode C」であると容易に判定することができる。
【0093】
〔図8:モード判定処理を参照〕
ステップS120:コードの時間的な変化傾向の分析が終了すると(ステップS118:Yes)、モード決定部34は、「mode A」及び「mode C」について、それぞれコードの内容別(機体識別コード情報別、高度情報別)に「An,An+1,An+2,・・・」、「Cn,Cn+1,Cn+2,・・・」としてラベリングする。
このようにしてラベリングを行うと、モード決定部34は呼び出し元の騒音監視処理(図7)に復帰する。
【0094】
〔データ整合例〕
図10は、時刻データと騒音データとを整合させた場合の例を示す図である。なお、図10中(A)は時刻データの構造例を示し、図10中(B)は騒音データの構造例を示している。
【0095】
上記のように時刻データは、1秒間ごとの応答信号から作成されており、例えば「時刻」、「コード(mode A又はmode C)」、「電波強度」、「出現回数」等を配列した構造を有する。また騒音データは、上記のように騒音イベント発生時に作成され、例えば「時刻」、「仰角」、「方位角」等を配列した構造を有している。
【0096】
騒音データには、「仰角」及び「方位角」が含まれるため、これらの情報をもとに観測点からみた騒音源の到来方向を知ることができる。このとき、騒音イベントの発生時刻が合わせて記録されているため、この時刻に整合する時刻データから「mode A」及び「mode C」の情報を取得すれば、「機体識別コード情報」や「高度情報」から騒音源(航空機AP1,AP2等の固有情報)との照合の精度向上を図ることができる。
【0097】
本発明は上述した実施形態に制約されることなく、種々に変形して実施することができる。一実施形態では、飛行場を対象地域としているが、航空機騒音監視方法及び航空機騒音監視装置は、飛行場以外でも利用することができる。
【0098】
また、観測ユニット100の構成は一例であり、複数の機能要素を1つに統合したり、あるいは1つの機能要素を複数に分割して観測ユニット100を構成してもよい。
【符号の説明】
【0099】
10 マイクロホン−アンテナユニット
12 レーダ受信アンテナ
14 騒音計測用マイクロホン
16 音の到来方向識別用マイクロホン
20 受信部
22 目的信号群抽出部
24 一時メモリ
26 時間間隔分析部
28 ヒストグラム作成部
30 フィルタ部
32 平均強度出現回数算出部
34 モード決定部
36 時刻データ作成部
38 騒音測定部
40 整合部
100 観測ユニット
【特許請求の範囲】
【請求項1】
不特定数の二次監視レーダ(SSR)からの質問信号に対して、不特定数の航空機から発せられた応答信号を受信するステップと、
所定時間内に受信された複数の応答信号について、互いの時間間隔を算出するステップと、
算出された複数通りの時間間隔について、個別の頻度を算出するステップと、
算出された頻度が最大となる特定の時間間隔を用いて、前記所定時間内に受信された複数の応答信号の中から特定の応答信号群をフィルタリングするステップと
を有する航空機騒音監視方法。
【請求項2】
請求項1に記載の航空機騒音監視方法において、
前記フィルタリングするステップは、
前記所定時間内に受信された複数の応答信号のうち、前記特定の時間間隔をおいて受信された応答信号のペアを抽出するステップ
を含む航空機騒音監視方法。
【請求項3】
請求項1又は2に記載の航空機騒音監視方法において、
フィルタリング後の応答信号の中で、前記特定の時間間隔をおいて受信された応答信号のペアが互いに同じ内容である場合、これら応答信号を機体識別コード情報であると判定するステップと、
フィルタリング後の応答信号の中で、前記特定の時間間隔をおいて受信された応答信号のペアが互いに同じ内容でなく、一方の応答信号が前記機体識別コード情報であると判定済みである場合、他方の応答信号を高度情報であると判定するステップと
をさらに有する航空機騒音監視方法。
【請求項4】
請求項3に記載の航空機騒音監視方法において、
フィルタリング後の応答信号の中で、前記特定の時間間隔をおいて受信された応答信号のペアが互いに同じ内容でなく、いずれの応答信号も前記機体識別コード情報であると判定されていない場合、応答信号のペアをバッファに蓄積するステップと、
蓄積されたペアの応答信号について、それぞれの内容の時間的な変化を監視し、変化が現れない方を機体識別コード情報であると判定し、変化が現れた方を高度情報であると判定するステップ
をさらに有する航空機騒音監視方法。
【請求項5】
請求項1から4のいずれかに記載の航空機騒音監視方法において、
フィルタリング後の応答信号と測定された航空機騒音の結果とを整合させるステップをさらに有する航空機騒音監視方法。
【請求項6】
不特定数の二次監視レーダ(SSR)からの質問信号に対して、不特定数の航空機から発せられた応答信号を受信する受信部と、
前記受信部により所定時間内に受信された複数の応答信号について、互いの時間間隔を算出する時間間隔算出部と、
前記時間間隔算出部により算出された複数通りの時間間隔について、個別の頻度を算出する頻度算出部と、
前記頻度算出部により算出された頻度が最大となる特定の時間間隔を用いて、前記所定時間内に受信された複数の応答信号の中から特定の応答信号群をフィルタリングするフィルタ部と
を備えた航空機騒音監視装置。
【請求項7】
請求項6に記載の航空機騒音監視装置において、
前記フィルタ部は、
前記所定時間内に受信された複数の応答信号のうち、前記特定の時間間隔をおいて受信された応答信号のペアを抽出することを特徴とする航空機騒音監視装置。
【請求項8】
請求項6又は7に記載の航空機騒音監視装置において、
前記フィルタ部によるフィルタリング後の応答信号の中で、前記特定の時間間隔をおいて受信された応答信号のペアが互いに同じ内容である場合、これら応答信号を機体識別コード情報であると判定するモード判定部をさらに備え、
前記モード判定部は、
前記フィルタ部によるフィルタリング後の応答信号の中で、前記特定の時間間隔をおいて受信された応答信号のペアが互いに同じ内容でなく、一方の応答信号が前記機体識別コード情報であると判定済みである場合、他方の応答信号を高度情報であると判定することを特徴とする航空機騒音監視装置。
【請求項9】
請求項8に記載の航空機騒音監視装置において、
前記モード判定部は、
前記フィルタ部によるフィルタリング後の応答信号の中で、前記特定の時間間隔をおいて受信された応答信号のペアが互いに同じ内容でなく、いずれの応答信号も前記機体識別コード情報であると判定されていない場合、応答信号のペアをバッファに蓄積し、蓄積されたペアの応答信号について、それぞれの内容の時間的な変化を監視し、変化が現れない方を機体識別コード情報であると判定し、変化が現れた方を高度情報であると判定することを特徴とする航空機騒音監視装置。
【請求項10】
請求項6から9のいずれかに記載の航空機騒音監視装置において、
航空機の騒音を測定する騒音測定部と、
前記フィルタ部によるフィルタリング後の応答信号と前記騒音測定部により測定された航空機騒音の結果とを整合させる整合部と
をさらに備えた航空機騒音監視装置。
【請求項1】
不特定数の二次監視レーダ(SSR)からの質問信号に対して、不特定数の航空機から発せられた応答信号を受信するステップと、
所定時間内に受信された複数の応答信号について、互いの時間間隔を算出するステップと、
算出された複数通りの時間間隔について、個別の頻度を算出するステップと、
算出された頻度が最大となる特定の時間間隔を用いて、前記所定時間内に受信された複数の応答信号の中から特定の応答信号群をフィルタリングするステップと
を有する航空機騒音監視方法。
【請求項2】
請求項1に記載の航空機騒音監視方法において、
前記フィルタリングするステップは、
前記所定時間内に受信された複数の応答信号のうち、前記特定の時間間隔をおいて受信された応答信号のペアを抽出するステップ
を含む航空機騒音監視方法。
【請求項3】
請求項1又は2に記載の航空機騒音監視方法において、
フィルタリング後の応答信号の中で、前記特定の時間間隔をおいて受信された応答信号のペアが互いに同じ内容である場合、これら応答信号を機体識別コード情報であると判定するステップと、
フィルタリング後の応答信号の中で、前記特定の時間間隔をおいて受信された応答信号のペアが互いに同じ内容でなく、一方の応答信号が前記機体識別コード情報であると判定済みである場合、他方の応答信号を高度情報であると判定するステップと
をさらに有する航空機騒音監視方法。
【請求項4】
請求項3に記載の航空機騒音監視方法において、
フィルタリング後の応答信号の中で、前記特定の時間間隔をおいて受信された応答信号のペアが互いに同じ内容でなく、いずれの応答信号も前記機体識別コード情報であると判定されていない場合、応答信号のペアをバッファに蓄積するステップと、
蓄積されたペアの応答信号について、それぞれの内容の時間的な変化を監視し、変化が現れない方を機体識別コード情報であると判定し、変化が現れた方を高度情報であると判定するステップ
をさらに有する航空機騒音監視方法。
【請求項5】
請求項1から4のいずれかに記載の航空機騒音監視方法において、
フィルタリング後の応答信号と測定された航空機騒音の結果とを整合させるステップをさらに有する航空機騒音監視方法。
【請求項6】
不特定数の二次監視レーダ(SSR)からの質問信号に対して、不特定数の航空機から発せられた応答信号を受信する受信部と、
前記受信部により所定時間内に受信された複数の応答信号について、互いの時間間隔を算出する時間間隔算出部と、
前記時間間隔算出部により算出された複数通りの時間間隔について、個別の頻度を算出する頻度算出部と、
前記頻度算出部により算出された頻度が最大となる特定の時間間隔を用いて、前記所定時間内に受信された複数の応答信号の中から特定の応答信号群をフィルタリングするフィルタ部と
を備えた航空機騒音監視装置。
【請求項7】
請求項6に記載の航空機騒音監視装置において、
前記フィルタ部は、
前記所定時間内に受信された複数の応答信号のうち、前記特定の時間間隔をおいて受信された応答信号のペアを抽出することを特徴とする航空機騒音監視装置。
【請求項8】
請求項6又は7に記載の航空機騒音監視装置において、
前記フィルタ部によるフィルタリング後の応答信号の中で、前記特定の時間間隔をおいて受信された応答信号のペアが互いに同じ内容である場合、これら応答信号を機体識別コード情報であると判定するモード判定部をさらに備え、
前記モード判定部は、
前記フィルタ部によるフィルタリング後の応答信号の中で、前記特定の時間間隔をおいて受信された応答信号のペアが互いに同じ内容でなく、一方の応答信号が前記機体識別コード情報であると判定済みである場合、他方の応答信号を高度情報であると判定することを特徴とする航空機騒音監視装置。
【請求項9】
請求項8に記載の航空機騒音監視装置において、
前記モード判定部は、
前記フィルタ部によるフィルタリング後の応答信号の中で、前記特定の時間間隔をおいて受信された応答信号のペアが互いに同じ内容でなく、いずれの応答信号も前記機体識別コード情報であると判定されていない場合、応答信号のペアをバッファに蓄積し、蓄積されたペアの応答信号について、それぞれの内容の時間的な変化を監視し、変化が現れない方を機体識別コード情報であると判定し、変化が現れた方を高度情報であると判定することを特徴とする航空機騒音監視装置。
【請求項10】
請求項6から9のいずれかに記載の航空機騒音監視装置において、
航空機の騒音を測定する騒音測定部と、
前記フィルタ部によるフィルタリング後の応答信号と前記騒音測定部により測定された航空機騒音の結果とを整合させる整合部と
をさらに備えた航空機騒音監視装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−61155(P2013−61155A)
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願番号】特願2011−197872(P2011−197872)
【出願日】平成23年9月12日(2011.9.12)
【出願人】(000115636)リオン株式会社 (128)
【Fターム(参考)】
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願日】平成23年9月12日(2011.9.12)
【出願人】(000115636)リオン株式会社 (128)
【Fターム(参考)】
[ Back to top ]