
航走トリム自動変更システム
【課題】航走する水面に波浪が存在した場合であっても、効率の良い推進が可能となる技術を提供する。
【解決手段】現在の海象に対応してS101、船舶の最適なトリム角を導出するS103。また、航走する船舶の現在のトリム角を計測するS102。その現在のトリム角を、その最適なトリム角に遷移させるためのバラストの変動量を算出しS105、その変動量に基づいて、海象に応じて船舶の航走トリムを変えるS106、航走トリム自動変更システムを構築する。
【解決手段】現在の海象に対応してS101、船舶の最適なトリム角を導出するS103。また、航走する船舶の現在のトリム角を計測するS102。その現在のトリム角を、その最適なトリム角に遷移させるためのバラストの変動量を算出しS105、その変動量に基づいて、海象に応じて船舶の航走トリムを変えるS106、航走トリム自動変更システムを構築する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、航走トリム自動変更システムに関する。
【背景技術】
【0002】
地球資源の消費の抑制や排出する二酸化炭素の削減などの環境問題に対する要求の高まりによって、船舶を効率的に推進させる技術が求められてきている。そのような求めに対応する技術が知られている(例えば、特許文献1参照)。特許文献1に記載されている技術は、船舶の姿勢を推進効率の良い状態に維持するようにして、平水中での推進効率の低下を抑制している。
【0003】
特許文献1に記載の技術は、小型の高速艇の速度維持に好適である。しかしながら、特許文献1に記載の技術を、比較的低速な大型の船舶に適用して、船舶の姿勢を推進効率の良い状態に維持することは、非常に困難である。大型の船舶を効率的に推進させる技術が求められてきている。
【0004】
大型の船舶は、一般に計画喫水状態の姿勢(特に、トリム)、および計画速度で平水中を航走した時に、最も燃費が最もよくなるように設計されている。言い換えれば、大型の船舶は、そのときの船体抵抗が最も小さくなるように設計されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第2949090号
【発明の概要】
【発明が解決しようとする課題】
【0006】
船舶は、平水を航走する場合を想定し、そのときの船体抵抗が最も小さくなるように設計されている。船舶が航走する水面が、常に平水であることは稀であって、波浪中では平水中よりも抵抗が増加する。従って航走する水面に、波浪が存在した場合であっても、効率の良い推進が可能となる技術が求められている。
【課題を解決するための手段】
【0007】
以下に、[発明を実施するための形態]で使用される番号を用いて、[課題を解決するための手段]を説明する。これらの番号は、[特許請求の範囲]の記載と[発明を実施するための形態]との対応関係を明らかにするために付加されたものである。ただし、それらの番号を、[特許請求の範囲]に記載されている発明の技術的範囲の解釈に用いてはならない。
【0008】
上記の課題を解決するために、現在の海象に対応して船舶(1)の最適なトリム角を導出する最適トリム角導出部(21)と、航走する船舶(1)の現在のトリム角を計測するトリム角計測部(22)と、その現在のトリム角をその最適なトリム角に遷移させるためのバラストの変動量を算出するバラスト変動量演算部(23)とを具備する航走トリム自動変更システムを構築する。
【0009】
その航走トリム自動変更システムにおいて、さらに、その船舶(1)に備えられたバラストタンク(3)(4)のバラストの状態を制御するバラスト制御部(5)を備えることが好ましい。そして、そのバラスト制御部(5)は、そのバラストの変動量に基づいて、そのバラストタンク(3)(4)のバラストの状態を変更するものであることが好ましい。
【0010】
その航走トリム自動変更システムにおいて、さらに、その現在の海象を示す海象データを生成する海象特定部(31)(32)を備えることが好ましい。そして、その最適トリム角導出部(21)は、その海象特定部(31)(32)から供給されたその海象データに基づいて、その最適なトリム角を導出するものであることが好ましい。
【0011】
その航走トリム自動変更システムにおいて、その海象特定部(31)(32)は、目視観測、波高計(31)によって得られた波高データ、または、上空からの画像データの解析によって得られた解析データをその海象データとするものであることが好ましい。
【0012】
その航走トリム自動変更システムにおいて、その最適トリム角導出部(21)は、その船舶(1)の波浪中抵抗増加量と海象との関連性を複数のトリム角の各々に対応して保持する波浪中抵抗増加量特性データベース(28)と、その最適なトリム角とその現在のトリム角との差分を示すトリム変更量を算出するトリム変更量演算部(27)とを備えることが好ましい。ここにおいて、そのトリム変更量演算部(27)は、その波浪中抵抗増加量特性データベース(28)を参照して、その複数のトリム角のうちの、その船舶(1)の抵抗の増加量が最小のトリム角をその最適なトリム角とする。また、そのバラスト変動量演算部(23)は、そのトリム変更量に基づいて、そのバラストの変動量を算出するものであることが好ましい。
【0013】
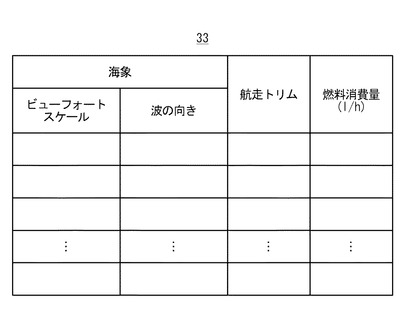
その航走トリム自動変更システムにおいて、その最適トリム角導出部(21)は、さらに、航行時の船舶(1)の状態を示す航行データを蓄積するデータ蓄積部(33)を備えることが好ましい。そして、そのデータ蓄積部(33)は、過去の海象と、その過去の海象のときのトリム角と、その過去の海象のとき燃料消費量とを関係付けてその航行データとして保持する。また、そのトリム変更量演算部(27)は、その抵抗増加量特性データベース(28)またはそのデータ蓄積部(33)のその航行データに少なくとも一方を参照して、その複数のトリム角のうちのその船舶(1)の抵抗の増加量が最小のトリム角をその最適なトリム角とするものであることが好ましい。
【0014】
また、上記の課題を解決するために、
[a]現在の海象に対応して船舶(1)の最適なトリム角を導出するステップと、
[b]航走する船舶(1)の現在のトリム角を計測するステップと、
[c]その現在のトリム角をその最適なトリム角に遷移させるためのバラストの変動量を算出するステップとを具備する航走トリム自動変更方法で航走トリムを自動的に変更しても良い。
【0015】
その航走トリム自動変更方法において、さらに、
[d]その船舶(1)に備えられたバラストタンク(3)(4)のバラストの状態を制御するステップを備えても良い。
この場合、その[d]ステップは、そのバラストの変動量に基づいて、そのバラストタンク(3)(4)のバラストの状態を変更するステップを含むことが好ましい。
【0016】
その航走トリム自動変更方法において、さらに、
[e]その現在の海象を示す海象データを生成するステップを備えても良い。
この場合、上述した[a]ステップは、その[e]ステップを実行することによって得られたその海象データに基づいて、その最適なトリム角を導出するステップを含むことが好ましい。
【0017】
その航走トリム自動変更方法において、その[e]ステップは、目視観測、波高計(31)によって得られた波高データ、または、上空からの画像データの解析によって得られた解析データをその海象データとするステップを含むことが好ましい。
【0018】
その航走トリム自動変更方法において、
その[a]ステップは、その最適なトリム角とその現在のトリム角との差分を示すトリム変更量を算出するステップを備えることが好ましい。ここで、そのトリム変更量を算出するステップは、その船舶(1)の抵抗の増加量と海象との関連性とが、複数のトリム角の各々に対応して保持されている抵抗増加量特性データベース(28)を参照して、その複数のトリム角のうちの、その船舶(1)の抵抗の増加量が最小のトリム角をその最適なトリム角とするステップを含むことが好ましい。また、その[c]ステップは、そのトリム変更量に基づいて、そのバラストの変動量を算出するステップを含むことが好ましい。
【0019】
その航走トリム自動変更方法において、さらに、
[f]航行時の船舶(1)の状態を示す航行データを蓄積するステップを備えることが好ましい。
その[f]ステップは、過去の海象と、その過去の海象のときのトリム角と、その過去の海象のとき燃料消費量とを関係付けてその航行データとして蓄積するステップを含むことが好ましい。ここで、上述のトリム変更量を算出するステップは、その抵抗増加量特性データベース(28)またはそのデータ蓄積部(33)のその航行データの少なくとも一方を参照して、その複数のトリム角のうちのその船舶(1)の抵抗の増加量が最小のトリム角をその最適なトリム角とするステップを含むことが好ましい。
【発明の効果】
【0020】
本願において開示される発明のうち、代表的なものによって得られる効果を簡単に説明すれば、航走する水面に、波浪が存在した場合であっても、効率の良い推進が可能となるという効果がある。
【図面の簡単な説明】
【0021】
【図1】図1は、航走トリム自動変更システムを適用した船1の構成を例示する側面模式図である。
【図2】図2は、船1のバラストタンクの配置を示す平面模式図である。
【図3】図3は、第1実施形態の航走トリム自動変更装置2の構成を例示するブロック図である。
【図4】図4は、抵抗増加量特性データベース28の構成を例示する図である。
【図5】図5は、本実施形態の動作を例示するフローチャートである。
【図6】図6は、第2実施形態の航走トリム自動変更装置2の構成を例示するブロック図である。
【図7】図7は、第3実施形態の航走トリム自動変更装置2の構成を例示するブロック図である。
【図8】図8は、第4実施形態の航走トリム自動変更装置2の構成を例示するブロック図である。
【図9】図9は、データ蓄積部33の構成を例示するテーブルである。
【図10】図10は、トリム角変更時における船1の抵抗増加量の変化を示すグラフである。
【発明を実施するための形態】
【0022】
以下、本発明の実施の形態を図面に基づいて説明する。なお、実施の形態を説明するための図において、同一の部材には原則として同一の符号を付し、その繰り返しの説明は省略する。
[第1実施形態]
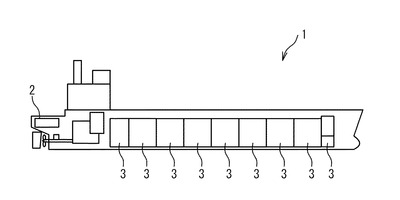
以下に、本願発明の第1実施形態について、図面を用いて説明する。図1は、本願発明の航走トリム自動変更システムを適用した船1の構成を例示する側面模式図である。図1は、船1のバラストタンク(右舷バラストタンク3、左舷バラストタンク4)の配置を模式的に例示している。図1を参照すると、船1の船体には、航走トリム自動変更装置2と、右舷バラストタンク3とが備えられている。また、船1の左舷側には、後述する左舷バラストタンク4が備えられている。
【0023】
船体の後部下部には、プロペラおよび舵が備えられている。プロペラは、たとえば、ディーゼルエンジンで構成された主機とプロペラシャフトを介して連結され、主機から駆動力を受けて回転されるようになっている。プロペラシャフトには、主機による駆動馬力を検出する軸馬力計が設けられている。
【0024】
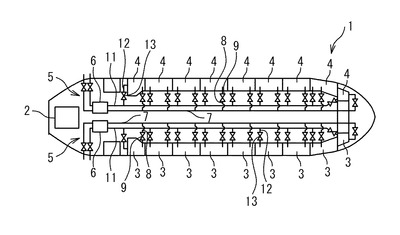
図2は、船1のバラストタンク(右舷バラストタンク3、左舷バラストタンク4)の配置を示す平面模式図である。船1は、航走トリム自動変更装置2と、右舷バラストタンク3と、左舷バラストタンク4と、注排水装置5とを備えている。その注排水装置5は、バラストポンプ6と、注水管7と、注水分岐管8と、注水調整弁9と、排水管11と、排水分岐管12と、排水調整弁13とを含んでいる。
【0025】
図2に示されているように、船体の右舷側端部には、複数個の右舷バラストタンク3が長手方向に沿って配置されている。また、船体の左舷側端部には、複数の左舷バラストタンク4が長手方向に沿って配置されている。右舷バラストタンク3と左舷バラストタンク4とは、船体の中心に対して概ね左右対称に設けられている。右舷バラストタンク3と左舷バラストタンク4には、図示をしないが内部に格納されているバラスト水の量を検出する検出器が備えられている。
【0026】
船1に備えられた航走トリム自動変更装置2は、右舷側の注排水装置5および左舷側の注排水装置5の動作を制御する。右舷側の注排水装置5は、右舷バラストタンク3の注排水を行う。左舷側の注排水装置5は、左舷バラストタンク4の注排水を行う。この右舷側の注排水装置5および左舷側の注排水装置5は、航走トリム自動変更システムの一部として機能する。
【0027】
右舷側のバラストポンプ6は、注排水装置5のバラスト水の注排水を支援する。右舷側の注水管7は、長手方向に延設されている。右舷側の注水分岐管8は、右舷側の注水管7と、各右舷バラストタンク3および船外とを連結する。右舷側の注水調整弁9は、右舷側の注水分岐管8の開度を調整する。右舷側の排水管11は、長手方向に延設されている。右舷側の排水分岐管12は、右舷側の排水管11と各右舷バラストタンク3、および船外とを連結する。右舷側の排水調整弁13は、右舷側の排水分岐管12の開度を調整する。
【0028】
左舷側のバラストポンプ6は、注排水装置5のバラスト水の注排水を支援する。左舷側の注水管7は、長手方向に延設されている。左舷側の注水分岐管8は、左舷側の注水管7と、各右舷バラストタンク3および船外とを連結する。左舷側の注水調整弁9は、左舷側の注水分岐管8の開度を調整する。左舷側の排水管11は、長手方向に延設されている。左舷側の排水分岐管12は、左舷側の排水管11と各右舷バラストタンク3、および船外とを連結する。左舷側の排水調整弁13は、左舷側の排水分岐管12の開度を調整する。
【0029】
なお、本実施形態の船1は、船体の前部の右舷バラストタンク3と左舷バラストタンク4との間に燃料タンクが備えられている。また、船体の後部の右舷バラストタンク3および左舷バラストタンク4の後方にも燃料タンクが備えられている。燃料タンクは、主機等で用いられる燃料が格納される。燃料タンクには、図示をしないが内部に格納されている燃料の量を検出する検出器が備えられている。
【0030】
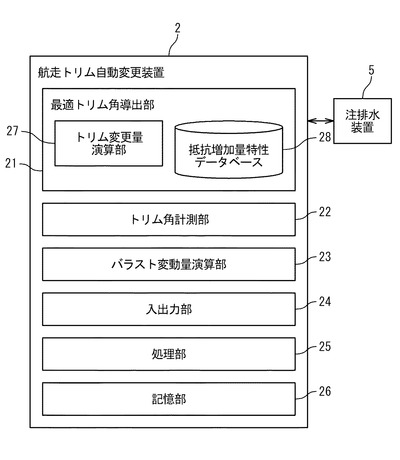
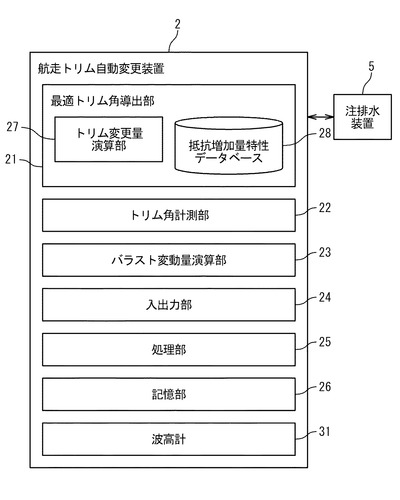
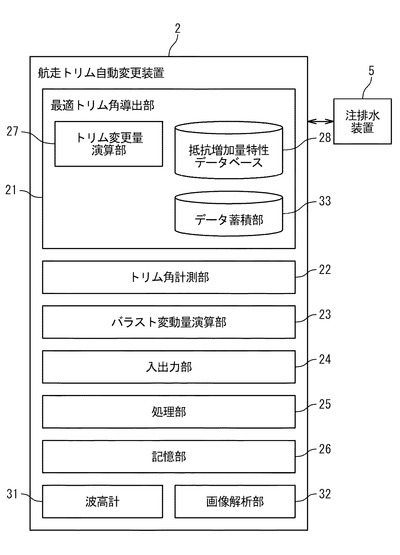
図3は、本実施形態の航走トリム自動変更装置2の構成を例示するブロック図である。航走トリム自動変更装置2は、最適トリム角導出部21と、トリム角計測部22と、バラスト変動量演算部23と、入出力部24と、処理部25と、記憶部26とを備えている。
【0031】
入出力部24は、本実施形態の実現に必要なデータ、操作指示等の入力を受け、右舷側の注排水装置5、および左舷側の注排水装置5を動作させる制御信号、動作結果等を出力する。記憶部26は、制御に必要なプログラム、データ等を記憶している。処理部25は、入出力部24からの操作指示に基づいて、記憶部26より必要なプログラムを読み出し、入出力部24からのデータおよび記憶部26に格納されたデータ等を用いて処理する。航走トリム自動変更装置2は、処理部25が生成した所要の制御信号に基づいて、右舷側の注排水装置5および左舷側の注排水装置5を動作させることができる。
【0032】
最適トリム角導出部21は、航走時の海象に基づいて、最適なトリム角を導出する。ここにおいて、最適なトリム角とは、船1の主機の所用馬力が最も少なくなるような姿勢であるものとする。最適トリム角導出部21は、トリム変更量演算部27と、抵抗増加量特性データベース28とを含んでいる。トリム変更量演算部27は、現在のトリム角を最適なトリム角に変更する場合の、変更量を演算する。抵抗増加量特性データベース28は、平水面や波浪水面を航行する際の最適なトリム角を導出するために必要なデータを保持している。
【0033】
トリム角計測部22は、船1の現在のトリム角を計測する。バラスト変動量演算部23は、トリム角の変更量に応じて、バラストの変動を算出する。なお、最適トリム角導出部21、トリム角計測部22、バラスト変動量演算部23は、記憶部26に保持されたプログラムを実行することによってソフトウェア的に実現するものであっても、ハードウェアとして構成されるものであっても良い。
【0034】
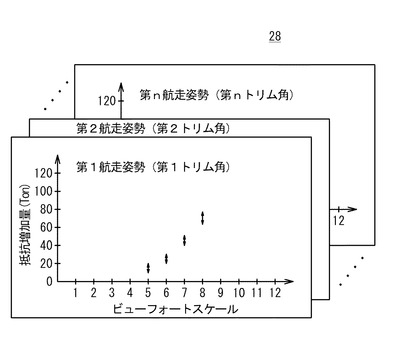
図4は、抵抗増加量特性データベース28の構成を例示する図である。抵抗増加量特性データベース28は、複数の航走姿勢に対応して、異なる海象と抵抗増加量とを関連付けている。この抵抗増加量特性データベース28は、図4に示されるように、あらかじめ船体の模型を用いた水槽試験を種々の海象について実施して形成することが好ましい。種々の海象としては、波高、波長、波の周期、波の向きなどが例示される。
【0035】
図4に示されているように、抵抗増加量特性データベース28は、このような種々の海象を、例えばビューフォートスケールで表し、その値と速度を変化させた水槽試験を行なうことによって形成されることが好ましい。抵抗増加量特性データベース28は、その結果に基づいて、それぞれの推進抵抗の変化を、異なる航走姿勢ごとにデータベースとして保持している。
【0036】
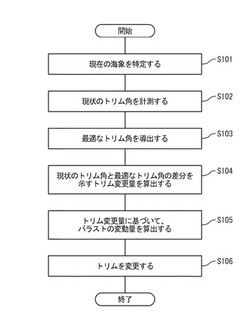
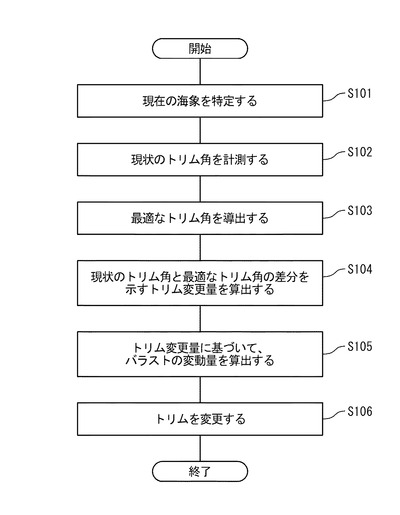
図5は、本実施形態の動作を例示するフローチャートである。ステップS101において、現在の海象を特定する。このとき、航走する船舶からの目視による観測で、現在の海象を特定するものとする。本実施形態において、特定した海象を示す場合に、ビューフォート階級表に対応させるものとする。ステップS102において、航走する船舶の現状のトリム角を、トリム計を用いて計測する。なお、上述のステップS101とステップS102の動作において、その動作を実行する順番に制限は無い。
【0037】
ステップS103において、特定した現在の海象に基づいて最適なトリム角を導出する。ユーザは、トリム変更量演算部27に、現在の海象に対応するビューフォートスケール値及び波向きを入力する。トリム変更量演算部27は、その入力に応答して抵抗増加量特性データベース28を参照し、入力されたビューフォートスケール値に基づいて、抵抗増加量が最小のトリム角を選択する。
【0038】
ステップS104において、最適トリム角導出部21のトリム変更量演算部27は、選択されたトリム角を最適なトリム角とし、ステップS102で得られた現状のトリム角との差分と算出する。最適トリム角導出部21は、その差分をトリム変更量とし、そのトリム変更量をバラスト変動量演算部23に供給する。
【0039】
ステップS105において、バラスト変動量演算部23は、供給されたトリム変更量に基づいて、現在のバラストの状態を、最適なトリム角に対応するバラストに移行するための、バラストの変動量を算出する。換言すると、バラスト変動量演算部23は、所定の喫水で、最適なトリムとなる各右舷バラストタンク3、左舷バラストタンク4のバラスト水量を算出する。次いで、バラスト変動量演算部23は、算出された各右舷バラストタンク3、左舷バラストタンク4のバラスト水量とするために必要な注排水量を算出する。
【0040】
ステップS106において、注排水装置5は、そのバラストの変動量に基づいて、バラストタンク内のバラストを変化させて、トリムを変更する。航走トリム自動変更装置2は、右舷側のバラストポンプ6および左舷側のバラストポンプ6の注排水量、各注水調整弁9および各排水調整弁13の開閉および開度等を算出し、入出力部24を介してそれらを制御信号として右舷側のバラストポンプ6、左舷側のバラストポンプ6、各注水調整弁9、各排水調整弁13に送信する。右舷側のバラストポンプ6、左舷側のバラストポンプ6、各注水調整弁9および各排水調整弁13が、制御信号に応じて動作することにより、各右舷バラストタンク3、左舷バラストタンク4は所定のバラスト水量となり、船1は、海象の変化に応じたトリム角で航走することが可能となる。
【0041】
[第2実施形態]
以下に、図面を参照して、本願発明の航走トリム自動変更システムの第2実施形態について説明を行う。図6は、第2実施形態の航走トリム自動変更装置2の構成を例示するブロック図である。第2実施形態の航走トリム自動変更装置2は、第1実施形態の航走トリム自動変更装置2に、更に波高計31を含んで構成されている。
【0042】
波高計31は、目視観測あるいは超音波式、またはレーダー式の波高計である。波高計31は、船1の所定の場所に設置され、航走中の波高を計測する機能を備えている。例えば、超音波式の波高計31は、船1の船首付近に設置され、水面の波の高さを超音波の反射によって測定する。また、レーダー式の波高計31は、あらかじめ船1の備えられていたレーダー装置、または、新たなレーダー装置の画像を用いて、水面の波の高さを測定する。
【0043】
第2実施形態の動作において、上述の図5のフローチャートのステップS101で、波高計31は、現在の波高を示す波高データを生成する。波高計31は、その波高データを最適トリム角導出部21に供給する。以降の処理は、第1実施形態と同様である。
【0044】
第2実施形態の航走トリム自動変更装置2は、海象の特定を、波高計31を利用して行っている。そのため、人的資源の消費を抑えることが可能となる。また、波高計31と目視との両方による海象の特定をおこなうことも可能である。この場合、海象の特定を高い精度で実現することができる。
【0045】
[第3実施形態]
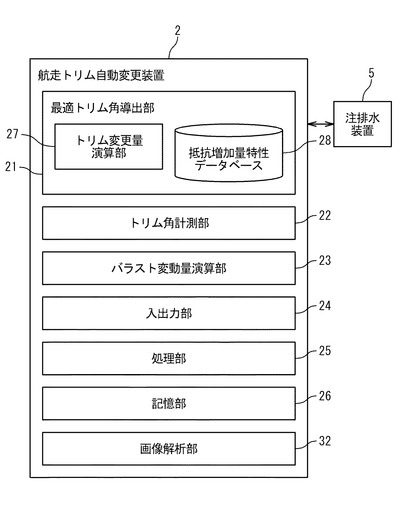
以下に、図面を参照して、本願発明の航走トリム自動変更システムの第3実施形態について説明を行う。図7は、第3実施形態の航走トリム自動変更装置2の構成を例示するブロック図である。第3実施形態の航走トリム自動変更装置2は、第1実施形態の航走トリム自動変更装置2に、更に画像解析部32を含んで構成されている。
【0046】
画像解析部32は、人工衛星から供給される水面の画像データ(例えば、合成開口レーダー(SAR:Synthetic Aperture Radar)画像の画像データ)を受け取り、画像解析を行って、波高や波の向きなどの海象を特定する機能を備えている。
【0047】
第3実施形態の動作において、上述の図5のフローチャートのステップS101で、画像解析部32は、現在の海象を示す海象データを生成する。画像解析部32は、その海象データを最適トリム角導出部21に供給する。以降の処理は、第1実施形態と同様である。
【0048】
第3実施形態の航走トリム自動変更装置2は、海象の特定を波高計31を利用して行っている。そのため、第2実施形態と同様に、人的資源の消費を抑えることが可能となる。また、画像解析部32と目視との両方による海象の特定をおこなうことも可能である。この場合、海象の特定を高い精度で実現することができる。さらに、航走トリム自動変更装置2に、波高計31と画像解析部32の両方を備えてもよい。
【0049】
[第4実施形態]
以下に、図面を参照して、本願発明の航走トリム自動変更システムの第4実施形態について説明を行う。図8は、第4実施形態の航走トリム自動変更装置2の構成を例示するブロック図である。第4実施形態の航走トリム自動変更装置2は、最適トリム角導出部21に、更にデータ蓄積部33を含んで構成されている。なお、第4実施形態の航走トリム自動変更装置2は、図8に例示するような、波高計31と画像解析部32とを備えた構成に制限されることは無い。
【0050】
データ蓄積部33は、海象と、航走トリムと、このときの燃料消費量とを関連付けて保持している。図9は、データ蓄積部33の構成を例示するテーブルである。第4実施形態の船1において、航走トリム自動変更装置2は、航海中に得られた航走トリムと燃料消費量とに関連性を、その時々の海象に対応付けてデータとしてデータ蓄積部33に格納する。
【0051】
第4実施形態の動作において、上述の図5のフローチャートのステップS103で、現在の海象に基づいて最適なトリム角を導出するとき、ユーザは、ビューフォートスケール値を入力する。トリム変更量演算部27は、その入力に応答して抵抗増加量特性データベース28またはデータ蓄積部33の少なくとも一方を参照し、入力されたビューフォートスケール値に基づいて、抵抗増加量が最小のトリム角を選択する。抵抗増加量特性データベース28またはデータ蓄積部33のどちらを参照するかの判断は、ユーザが行っても良いし、機械的に行っても良い。
【0052】
第4実施形態の航走トリム自動変更装置2は、最適なトリム角の導出を、抵抗増加量特性データベース28、またはデータ蓄積部33を利用して行っている。第4実施形態の航走トリム自動変更装置2は、模型などであらかじめ試験的に生成されたデータと、実際の航行で得られてデータとを併用することが可能である。そのため、より実際の航行に適したトリム角を導出することができる。
【0053】
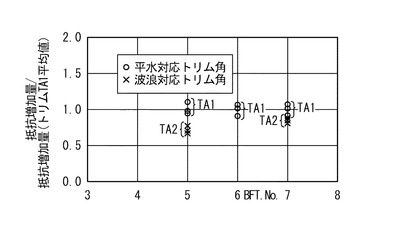
図10は、上述の複数の実施形態で説明した、トリム角変更時における船1の抵抗増加量の変化を示すグラフである。平水対応トリム角TA1は、平水中での推進効率を考慮したトリム角を示している。また、波浪対応トリム角TA2は、波浪中での推進効率を考慮したトリム角を示している。図10に示されているように、解消に対応してトリム角を変更することによって、波浪中抵抗増加量を減少させることが可能となる。
【0054】
以上、本願発明の実施の形態を具体的に説明した。本願発明は上述の実施の形態に限定されるものではなく、その要旨を逸脱しない範囲で種々変更可能である。また、上述の複数の実施形態は、その構成、動作に矛盾が生じない範囲において組み合わせて実施することが可能である。
【符号の説明】
【0055】
1…船
2…航走トリム自動変更装置
3…右舷バラストタンク
4…左舷バラストタンク
5…注排水装置
6…バラストポンプ
7…注水管
8…注水分岐管
9…注水調整弁
11…排水管
12…排水分岐管
13…排水調整弁
21…最適トリム角導出部
22…トリム角計測部
23…バラスト変動量演算部
24…入出力部
25…処理部
26…記憶部
27…トリム変更量演算部
28…抵抗増加量特性データベース
31…波高計
32…画像解析部
33…データ蓄積部
TA1…平水対応トリム角
TA2…波浪対応トリム角
【技術分野】
【0001】
本発明は、航走トリム自動変更システムに関する。
【背景技術】
【0002】
地球資源の消費の抑制や排出する二酸化炭素の削減などの環境問題に対する要求の高まりによって、船舶を効率的に推進させる技術が求められてきている。そのような求めに対応する技術が知られている(例えば、特許文献1参照)。特許文献1に記載されている技術は、船舶の姿勢を推進効率の良い状態に維持するようにして、平水中での推進効率の低下を抑制している。
【0003】
特許文献1に記載の技術は、小型の高速艇の速度維持に好適である。しかしながら、特許文献1に記載の技術を、比較的低速な大型の船舶に適用して、船舶の姿勢を推進効率の良い状態に維持することは、非常に困難である。大型の船舶を効率的に推進させる技術が求められてきている。
【0004】
大型の船舶は、一般に計画喫水状態の姿勢(特に、トリム)、および計画速度で平水中を航走した時に、最も燃費が最もよくなるように設計されている。言い換えれば、大型の船舶は、そのときの船体抵抗が最も小さくなるように設計されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第2949090号
【発明の概要】
【発明が解決しようとする課題】
【0006】
船舶は、平水を航走する場合を想定し、そのときの船体抵抗が最も小さくなるように設計されている。船舶が航走する水面が、常に平水であることは稀であって、波浪中では平水中よりも抵抗が増加する。従って航走する水面に、波浪が存在した場合であっても、効率の良い推進が可能となる技術が求められている。
【課題を解決するための手段】
【0007】
以下に、[発明を実施するための形態]で使用される番号を用いて、[課題を解決するための手段]を説明する。これらの番号は、[特許請求の範囲]の記載と[発明を実施するための形態]との対応関係を明らかにするために付加されたものである。ただし、それらの番号を、[特許請求の範囲]に記載されている発明の技術的範囲の解釈に用いてはならない。
【0008】
上記の課題を解決するために、現在の海象に対応して船舶(1)の最適なトリム角を導出する最適トリム角導出部(21)と、航走する船舶(1)の現在のトリム角を計測するトリム角計測部(22)と、その現在のトリム角をその最適なトリム角に遷移させるためのバラストの変動量を算出するバラスト変動量演算部(23)とを具備する航走トリム自動変更システムを構築する。
【0009】
その航走トリム自動変更システムにおいて、さらに、その船舶(1)に備えられたバラストタンク(3)(4)のバラストの状態を制御するバラスト制御部(5)を備えることが好ましい。そして、そのバラスト制御部(5)は、そのバラストの変動量に基づいて、そのバラストタンク(3)(4)のバラストの状態を変更するものであることが好ましい。
【0010】
その航走トリム自動変更システムにおいて、さらに、その現在の海象を示す海象データを生成する海象特定部(31)(32)を備えることが好ましい。そして、その最適トリム角導出部(21)は、その海象特定部(31)(32)から供給されたその海象データに基づいて、その最適なトリム角を導出するものであることが好ましい。
【0011】
その航走トリム自動変更システムにおいて、その海象特定部(31)(32)は、目視観測、波高計(31)によって得られた波高データ、または、上空からの画像データの解析によって得られた解析データをその海象データとするものであることが好ましい。
【0012】
その航走トリム自動変更システムにおいて、その最適トリム角導出部(21)は、その船舶(1)の波浪中抵抗増加量と海象との関連性を複数のトリム角の各々に対応して保持する波浪中抵抗増加量特性データベース(28)と、その最適なトリム角とその現在のトリム角との差分を示すトリム変更量を算出するトリム変更量演算部(27)とを備えることが好ましい。ここにおいて、そのトリム変更量演算部(27)は、その波浪中抵抗増加量特性データベース(28)を参照して、その複数のトリム角のうちの、その船舶(1)の抵抗の増加量が最小のトリム角をその最適なトリム角とする。また、そのバラスト変動量演算部(23)は、そのトリム変更量に基づいて、そのバラストの変動量を算出するものであることが好ましい。
【0013】
その航走トリム自動変更システムにおいて、その最適トリム角導出部(21)は、さらに、航行時の船舶(1)の状態を示す航行データを蓄積するデータ蓄積部(33)を備えることが好ましい。そして、そのデータ蓄積部(33)は、過去の海象と、その過去の海象のときのトリム角と、その過去の海象のとき燃料消費量とを関係付けてその航行データとして保持する。また、そのトリム変更量演算部(27)は、その抵抗増加量特性データベース(28)またはそのデータ蓄積部(33)のその航行データに少なくとも一方を参照して、その複数のトリム角のうちのその船舶(1)の抵抗の増加量が最小のトリム角をその最適なトリム角とするものであることが好ましい。
【0014】
また、上記の課題を解決するために、
[a]現在の海象に対応して船舶(1)の最適なトリム角を導出するステップと、
[b]航走する船舶(1)の現在のトリム角を計測するステップと、
[c]その現在のトリム角をその最適なトリム角に遷移させるためのバラストの変動量を算出するステップとを具備する航走トリム自動変更方法で航走トリムを自動的に変更しても良い。
【0015】
その航走トリム自動変更方法において、さらに、
[d]その船舶(1)に備えられたバラストタンク(3)(4)のバラストの状態を制御するステップを備えても良い。
この場合、その[d]ステップは、そのバラストの変動量に基づいて、そのバラストタンク(3)(4)のバラストの状態を変更するステップを含むことが好ましい。
【0016】
その航走トリム自動変更方法において、さらに、
[e]その現在の海象を示す海象データを生成するステップを備えても良い。
この場合、上述した[a]ステップは、その[e]ステップを実行することによって得られたその海象データに基づいて、その最適なトリム角を導出するステップを含むことが好ましい。
【0017】
その航走トリム自動変更方法において、その[e]ステップは、目視観測、波高計(31)によって得られた波高データ、または、上空からの画像データの解析によって得られた解析データをその海象データとするステップを含むことが好ましい。
【0018】
その航走トリム自動変更方法において、
その[a]ステップは、その最適なトリム角とその現在のトリム角との差分を示すトリム変更量を算出するステップを備えることが好ましい。ここで、そのトリム変更量を算出するステップは、その船舶(1)の抵抗の増加量と海象との関連性とが、複数のトリム角の各々に対応して保持されている抵抗増加量特性データベース(28)を参照して、その複数のトリム角のうちの、その船舶(1)の抵抗の増加量が最小のトリム角をその最適なトリム角とするステップを含むことが好ましい。また、その[c]ステップは、そのトリム変更量に基づいて、そのバラストの変動量を算出するステップを含むことが好ましい。
【0019】
その航走トリム自動変更方法において、さらに、
[f]航行時の船舶(1)の状態を示す航行データを蓄積するステップを備えることが好ましい。
その[f]ステップは、過去の海象と、その過去の海象のときのトリム角と、その過去の海象のとき燃料消費量とを関係付けてその航行データとして蓄積するステップを含むことが好ましい。ここで、上述のトリム変更量を算出するステップは、その抵抗増加量特性データベース(28)またはそのデータ蓄積部(33)のその航行データの少なくとも一方を参照して、その複数のトリム角のうちのその船舶(1)の抵抗の増加量が最小のトリム角をその最適なトリム角とするステップを含むことが好ましい。
【発明の効果】
【0020】
本願において開示される発明のうち、代表的なものによって得られる効果を簡単に説明すれば、航走する水面に、波浪が存在した場合であっても、効率の良い推進が可能となるという効果がある。
【図面の簡単な説明】
【0021】
【図1】図1は、航走トリム自動変更システムを適用した船1の構成を例示する側面模式図である。
【図2】図2は、船1のバラストタンクの配置を示す平面模式図である。
【図3】図3は、第1実施形態の航走トリム自動変更装置2の構成を例示するブロック図である。
【図4】図4は、抵抗増加量特性データベース28の構成を例示する図である。
【図5】図5は、本実施形態の動作を例示するフローチャートである。
【図6】図6は、第2実施形態の航走トリム自動変更装置2の構成を例示するブロック図である。
【図7】図7は、第3実施形態の航走トリム自動変更装置2の構成を例示するブロック図である。
【図8】図8は、第4実施形態の航走トリム自動変更装置2の構成を例示するブロック図である。
【図9】図9は、データ蓄積部33の構成を例示するテーブルである。
【図10】図10は、トリム角変更時における船1の抵抗増加量の変化を示すグラフである。
【発明を実施するための形態】
【0022】
以下、本発明の実施の形態を図面に基づいて説明する。なお、実施の形態を説明するための図において、同一の部材には原則として同一の符号を付し、その繰り返しの説明は省略する。
[第1実施形態]
以下に、本願発明の第1実施形態について、図面を用いて説明する。図1は、本願発明の航走トリム自動変更システムを適用した船1の構成を例示する側面模式図である。図1は、船1のバラストタンク(右舷バラストタンク3、左舷バラストタンク4)の配置を模式的に例示している。図1を参照すると、船1の船体には、航走トリム自動変更装置2と、右舷バラストタンク3とが備えられている。また、船1の左舷側には、後述する左舷バラストタンク4が備えられている。
【0023】
船体の後部下部には、プロペラおよび舵が備えられている。プロペラは、たとえば、ディーゼルエンジンで構成された主機とプロペラシャフトを介して連結され、主機から駆動力を受けて回転されるようになっている。プロペラシャフトには、主機による駆動馬力を検出する軸馬力計が設けられている。
【0024】
図2は、船1のバラストタンク(右舷バラストタンク3、左舷バラストタンク4)の配置を示す平面模式図である。船1は、航走トリム自動変更装置2と、右舷バラストタンク3と、左舷バラストタンク4と、注排水装置5とを備えている。その注排水装置5は、バラストポンプ6と、注水管7と、注水分岐管8と、注水調整弁9と、排水管11と、排水分岐管12と、排水調整弁13とを含んでいる。
【0025】
図2に示されているように、船体の右舷側端部には、複数個の右舷バラストタンク3が長手方向に沿って配置されている。また、船体の左舷側端部には、複数の左舷バラストタンク4が長手方向に沿って配置されている。右舷バラストタンク3と左舷バラストタンク4とは、船体の中心に対して概ね左右対称に設けられている。右舷バラストタンク3と左舷バラストタンク4には、図示をしないが内部に格納されているバラスト水の量を検出する検出器が備えられている。
【0026】
船1に備えられた航走トリム自動変更装置2は、右舷側の注排水装置5および左舷側の注排水装置5の動作を制御する。右舷側の注排水装置5は、右舷バラストタンク3の注排水を行う。左舷側の注排水装置5は、左舷バラストタンク4の注排水を行う。この右舷側の注排水装置5および左舷側の注排水装置5は、航走トリム自動変更システムの一部として機能する。
【0027】
右舷側のバラストポンプ6は、注排水装置5のバラスト水の注排水を支援する。右舷側の注水管7は、長手方向に延設されている。右舷側の注水分岐管8は、右舷側の注水管7と、各右舷バラストタンク3および船外とを連結する。右舷側の注水調整弁9は、右舷側の注水分岐管8の開度を調整する。右舷側の排水管11は、長手方向に延設されている。右舷側の排水分岐管12は、右舷側の排水管11と各右舷バラストタンク3、および船外とを連結する。右舷側の排水調整弁13は、右舷側の排水分岐管12の開度を調整する。
【0028】
左舷側のバラストポンプ6は、注排水装置5のバラスト水の注排水を支援する。左舷側の注水管7は、長手方向に延設されている。左舷側の注水分岐管8は、左舷側の注水管7と、各右舷バラストタンク3および船外とを連結する。左舷側の注水調整弁9は、左舷側の注水分岐管8の開度を調整する。左舷側の排水管11は、長手方向に延設されている。左舷側の排水分岐管12は、左舷側の排水管11と各右舷バラストタンク3、および船外とを連結する。左舷側の排水調整弁13は、左舷側の排水分岐管12の開度を調整する。
【0029】
なお、本実施形態の船1は、船体の前部の右舷バラストタンク3と左舷バラストタンク4との間に燃料タンクが備えられている。また、船体の後部の右舷バラストタンク3および左舷バラストタンク4の後方にも燃料タンクが備えられている。燃料タンクは、主機等で用いられる燃料が格納される。燃料タンクには、図示をしないが内部に格納されている燃料の量を検出する検出器が備えられている。
【0030】
図3は、本実施形態の航走トリム自動変更装置2の構成を例示するブロック図である。航走トリム自動変更装置2は、最適トリム角導出部21と、トリム角計測部22と、バラスト変動量演算部23と、入出力部24と、処理部25と、記憶部26とを備えている。
【0031】
入出力部24は、本実施形態の実現に必要なデータ、操作指示等の入力を受け、右舷側の注排水装置5、および左舷側の注排水装置5を動作させる制御信号、動作結果等を出力する。記憶部26は、制御に必要なプログラム、データ等を記憶している。処理部25は、入出力部24からの操作指示に基づいて、記憶部26より必要なプログラムを読み出し、入出力部24からのデータおよび記憶部26に格納されたデータ等を用いて処理する。航走トリム自動変更装置2は、処理部25が生成した所要の制御信号に基づいて、右舷側の注排水装置5および左舷側の注排水装置5を動作させることができる。
【0032】
最適トリム角導出部21は、航走時の海象に基づいて、最適なトリム角を導出する。ここにおいて、最適なトリム角とは、船1の主機の所用馬力が最も少なくなるような姿勢であるものとする。最適トリム角導出部21は、トリム変更量演算部27と、抵抗増加量特性データベース28とを含んでいる。トリム変更量演算部27は、現在のトリム角を最適なトリム角に変更する場合の、変更量を演算する。抵抗増加量特性データベース28は、平水面や波浪水面を航行する際の最適なトリム角を導出するために必要なデータを保持している。
【0033】
トリム角計測部22は、船1の現在のトリム角を計測する。バラスト変動量演算部23は、トリム角の変更量に応じて、バラストの変動を算出する。なお、最適トリム角導出部21、トリム角計測部22、バラスト変動量演算部23は、記憶部26に保持されたプログラムを実行することによってソフトウェア的に実現するものであっても、ハードウェアとして構成されるものであっても良い。
【0034】
図4は、抵抗増加量特性データベース28の構成を例示する図である。抵抗増加量特性データベース28は、複数の航走姿勢に対応して、異なる海象と抵抗増加量とを関連付けている。この抵抗増加量特性データベース28は、図4に示されるように、あらかじめ船体の模型を用いた水槽試験を種々の海象について実施して形成することが好ましい。種々の海象としては、波高、波長、波の周期、波の向きなどが例示される。
【0035】
図4に示されているように、抵抗増加量特性データベース28は、このような種々の海象を、例えばビューフォートスケールで表し、その値と速度を変化させた水槽試験を行なうことによって形成されることが好ましい。抵抗増加量特性データベース28は、その結果に基づいて、それぞれの推進抵抗の変化を、異なる航走姿勢ごとにデータベースとして保持している。
【0036】
図5は、本実施形態の動作を例示するフローチャートである。ステップS101において、現在の海象を特定する。このとき、航走する船舶からの目視による観測で、現在の海象を特定するものとする。本実施形態において、特定した海象を示す場合に、ビューフォート階級表に対応させるものとする。ステップS102において、航走する船舶の現状のトリム角を、トリム計を用いて計測する。なお、上述のステップS101とステップS102の動作において、その動作を実行する順番に制限は無い。
【0037】
ステップS103において、特定した現在の海象に基づいて最適なトリム角を導出する。ユーザは、トリム変更量演算部27に、現在の海象に対応するビューフォートスケール値及び波向きを入力する。トリム変更量演算部27は、その入力に応答して抵抗増加量特性データベース28を参照し、入力されたビューフォートスケール値に基づいて、抵抗増加量が最小のトリム角を選択する。
【0038】
ステップS104において、最適トリム角導出部21のトリム変更量演算部27は、選択されたトリム角を最適なトリム角とし、ステップS102で得られた現状のトリム角との差分と算出する。最適トリム角導出部21は、その差分をトリム変更量とし、そのトリム変更量をバラスト変動量演算部23に供給する。
【0039】
ステップS105において、バラスト変動量演算部23は、供給されたトリム変更量に基づいて、現在のバラストの状態を、最適なトリム角に対応するバラストに移行するための、バラストの変動量を算出する。換言すると、バラスト変動量演算部23は、所定の喫水で、最適なトリムとなる各右舷バラストタンク3、左舷バラストタンク4のバラスト水量を算出する。次いで、バラスト変動量演算部23は、算出された各右舷バラストタンク3、左舷バラストタンク4のバラスト水量とするために必要な注排水量を算出する。
【0040】
ステップS106において、注排水装置5は、そのバラストの変動量に基づいて、バラストタンク内のバラストを変化させて、トリムを変更する。航走トリム自動変更装置2は、右舷側のバラストポンプ6および左舷側のバラストポンプ6の注排水量、各注水調整弁9および各排水調整弁13の開閉および開度等を算出し、入出力部24を介してそれらを制御信号として右舷側のバラストポンプ6、左舷側のバラストポンプ6、各注水調整弁9、各排水調整弁13に送信する。右舷側のバラストポンプ6、左舷側のバラストポンプ6、各注水調整弁9および各排水調整弁13が、制御信号に応じて動作することにより、各右舷バラストタンク3、左舷バラストタンク4は所定のバラスト水量となり、船1は、海象の変化に応じたトリム角で航走することが可能となる。
【0041】
[第2実施形態]
以下に、図面を参照して、本願発明の航走トリム自動変更システムの第2実施形態について説明を行う。図6は、第2実施形態の航走トリム自動変更装置2の構成を例示するブロック図である。第2実施形態の航走トリム自動変更装置2は、第1実施形態の航走トリム自動変更装置2に、更に波高計31を含んで構成されている。
【0042】
波高計31は、目視観測あるいは超音波式、またはレーダー式の波高計である。波高計31は、船1の所定の場所に設置され、航走中の波高を計測する機能を備えている。例えば、超音波式の波高計31は、船1の船首付近に設置され、水面の波の高さを超音波の反射によって測定する。また、レーダー式の波高計31は、あらかじめ船1の備えられていたレーダー装置、または、新たなレーダー装置の画像を用いて、水面の波の高さを測定する。
【0043】
第2実施形態の動作において、上述の図5のフローチャートのステップS101で、波高計31は、現在の波高を示す波高データを生成する。波高計31は、その波高データを最適トリム角導出部21に供給する。以降の処理は、第1実施形態と同様である。
【0044】
第2実施形態の航走トリム自動変更装置2は、海象の特定を、波高計31を利用して行っている。そのため、人的資源の消費を抑えることが可能となる。また、波高計31と目視との両方による海象の特定をおこなうことも可能である。この場合、海象の特定を高い精度で実現することができる。
【0045】
[第3実施形態]
以下に、図面を参照して、本願発明の航走トリム自動変更システムの第3実施形態について説明を行う。図7は、第3実施形態の航走トリム自動変更装置2の構成を例示するブロック図である。第3実施形態の航走トリム自動変更装置2は、第1実施形態の航走トリム自動変更装置2に、更に画像解析部32を含んで構成されている。
【0046】
画像解析部32は、人工衛星から供給される水面の画像データ(例えば、合成開口レーダー(SAR:Synthetic Aperture Radar)画像の画像データ)を受け取り、画像解析を行って、波高や波の向きなどの海象を特定する機能を備えている。
【0047】
第3実施形態の動作において、上述の図5のフローチャートのステップS101で、画像解析部32は、現在の海象を示す海象データを生成する。画像解析部32は、その海象データを最適トリム角導出部21に供給する。以降の処理は、第1実施形態と同様である。
【0048】
第3実施形態の航走トリム自動変更装置2は、海象の特定を波高計31を利用して行っている。そのため、第2実施形態と同様に、人的資源の消費を抑えることが可能となる。また、画像解析部32と目視との両方による海象の特定をおこなうことも可能である。この場合、海象の特定を高い精度で実現することができる。さらに、航走トリム自動変更装置2に、波高計31と画像解析部32の両方を備えてもよい。
【0049】
[第4実施形態]
以下に、図面を参照して、本願発明の航走トリム自動変更システムの第4実施形態について説明を行う。図8は、第4実施形態の航走トリム自動変更装置2の構成を例示するブロック図である。第4実施形態の航走トリム自動変更装置2は、最適トリム角導出部21に、更にデータ蓄積部33を含んで構成されている。なお、第4実施形態の航走トリム自動変更装置2は、図8に例示するような、波高計31と画像解析部32とを備えた構成に制限されることは無い。
【0050】
データ蓄積部33は、海象と、航走トリムと、このときの燃料消費量とを関連付けて保持している。図9は、データ蓄積部33の構成を例示するテーブルである。第4実施形態の船1において、航走トリム自動変更装置2は、航海中に得られた航走トリムと燃料消費量とに関連性を、その時々の海象に対応付けてデータとしてデータ蓄積部33に格納する。
【0051】
第4実施形態の動作において、上述の図5のフローチャートのステップS103で、現在の海象に基づいて最適なトリム角を導出するとき、ユーザは、ビューフォートスケール値を入力する。トリム変更量演算部27は、その入力に応答して抵抗増加量特性データベース28またはデータ蓄積部33の少なくとも一方を参照し、入力されたビューフォートスケール値に基づいて、抵抗増加量が最小のトリム角を選択する。抵抗増加量特性データベース28またはデータ蓄積部33のどちらを参照するかの判断は、ユーザが行っても良いし、機械的に行っても良い。
【0052】
第4実施形態の航走トリム自動変更装置2は、最適なトリム角の導出を、抵抗増加量特性データベース28、またはデータ蓄積部33を利用して行っている。第4実施形態の航走トリム自動変更装置2は、模型などであらかじめ試験的に生成されたデータと、実際の航行で得られてデータとを併用することが可能である。そのため、より実際の航行に適したトリム角を導出することができる。
【0053】
図10は、上述の複数の実施形態で説明した、トリム角変更時における船1の抵抗増加量の変化を示すグラフである。平水対応トリム角TA1は、平水中での推進効率を考慮したトリム角を示している。また、波浪対応トリム角TA2は、波浪中での推進効率を考慮したトリム角を示している。図10に示されているように、解消に対応してトリム角を変更することによって、波浪中抵抗増加量を減少させることが可能となる。
【0054】
以上、本願発明の実施の形態を具体的に説明した。本願発明は上述の実施の形態に限定されるものではなく、その要旨を逸脱しない範囲で種々変更可能である。また、上述の複数の実施形態は、その構成、動作に矛盾が生じない範囲において組み合わせて実施することが可能である。
【符号の説明】
【0055】
1…船
2…航走トリム自動変更装置
3…右舷バラストタンク
4…左舷バラストタンク
5…注排水装置
6…バラストポンプ
7…注水管
8…注水分岐管
9…注水調整弁
11…排水管
12…排水分岐管
13…排水調整弁
21…最適トリム角導出部
22…トリム角計測部
23…バラスト変動量演算部
24…入出力部
25…処理部
26…記憶部
27…トリム変更量演算部
28…抵抗増加量特性データベース
31…波高計
32…画像解析部
33…データ蓄積部
TA1…平水対応トリム角
TA2…波浪対応トリム角
【特許請求の範囲】
【請求項1】
現在の海象に対応して船舶の波浪中抵抗増加量を減少させるための最適なトリム角を導出する最適トリム角導出部と、
航走する船舶の現在のトリム角を計測するトリム角計測部と、
前記現在のトリム角を前記最適なトリム角に遷移させるためのバラストの変動量を算出するバラスト変動演算部と
を具備する
航走トリム自動変更システム。
【請求項2】
請求項1に記載の航走トリム自動変更システムにおいて、さらに、
前記船舶に備えられたバラストタンクのバラストの状態を制御するバラスト制御部を備え、
前記バラスト制御部は、
前記バラストの変動量に基づいて、前記バラストタンクのバラストの状態を変更する
航走トリム自動変更システム。
【請求項3】
請求項1または2に記載の航走トリム自動変更システムにおいて、さらに、
前記現在の海象を示す海象データを生成する海象特定部を備え、
前記最適トリム角導出部は、
前記海象特定部から供給された前記海象データに基づいて、前記最適なトリム角を導出する
航走トリム自動変更システム。
【請求項4】
請求項3に記載の航走トリム自動変更システムにおいて、
前記海象特定部は、
波高計によって得られた波高データ、または、上空からの画像データの解析によって得られた解析データを前記海象データとする
航走トリム自動変更システム。
【請求項5】
請求項1から4のいずれか1項に記載の航走トリム自動変更システムにおいて、
前記最適トリム角導出部は、
前記船舶の抵抗の増加量と海象との関連性を複数のトリム角の各々に対応して保持する抵抗増加量特性データベースと、
前記最適なトリム角と前記現在のトリム角との差分を示すトリム変更量を算出するトリム変更量演算部と
を備え、
前記トリム変更量演算部は、
前記抵抗増加量特性データベースを参照して、前記複数のトリム角のうちの、前記船舶の抵抗の増加量が最小のトリム角を前記最適なトリム角とし、
前記バラスト変動演算部は、
前記トリム変更量に基づいて、前記バラストの変動量を算出する
航走トリム自動変更システム。
【請求項6】
請求項5に記載の航走トリム自動変更システムにおいて、
前記最適トリム角導出部は、さらに、
航行時の船舶の状態を示す航行データを蓄積するデータ蓄積部を備え、
前記データ蓄積部は、
過去の海象と、前記過去の海象のときのトリム角と、前記過去の海象のとき燃料消費量とを関係付けて前記航行データとして保持し、
前記トリム変更量演算部は、
前記抵抗増加量特性データベースまたは前記データ蓄積部の前記航行データの少なくとも一方を参照して、前記複数のトリム角のうちの前記船舶の抵抗の増加量が最小のトリム角を前記最適なトリム角とする
航走トリム自動変更システム。
【請求項7】
請求項1から6のいずれか1項に記載の航走トリム自動変更システムを備えた
船。
【請求項8】
(a)現在の海象に対応して船舶の最適なトリム角を導出するステップと、
(b)航走する船舶の現在のトリム角を計測するステップと、
(c)前記現在のトリム角を前記最適なトリム角に遷移させるためのバラストの変動量を算出するステップと
を具備する
航走トリム自動変更方法。
【請求項9】
請求項8に記載の航走トリム自動変更方法において、さらに、
(d)前記船舶に備えられたバラストタンクのバラストの状態を制御するステップを備え、
前記(d)ステップは、
前記バラストの変動量に基づいて、前記バラストタンクのバラストの状態を変更するステップを含む
航走トリム自動変更方法。
【請求項10】
請求項8または9に記載の航走トリム自動変更方法において、さらに、
(e)前記現在の海象を示す海象データを生成するステップを備え、
前記(a)ステップは、
前記(e)ステップを実行することによって得られた前記海象データに基づいて、前記最適なトリム角を導出するステップを含む
航走トリム自動変更方法。
【請求項11】
請求項10に記載の航走トリム自動変更方法において、
前記(e)ステップは、
波高計によって得られた波高データ、または、上空からの画像データの解析によって得られた解析データを前記海象データとするステップを含む
航走トリム自動変更方法。
【請求項12】
請求項8から11のいずれか1項に記載の航走トリム自動変更方法において、
前記(a)ステップは、
前記最適なトリム角と前記現在のトリム角との差分を示すトリム変更量を算出するステップを備え、
前記トリム変更量を算出するステップは、
前記前記船舶の抵抗の増加量と海象との関連性とが、複数のトリム角の各々に対応して保持されている抵抗増加量特性データベースを参照して、前記複数のトリム角のうちの、前記船舶の抵抗の増加量が最小のトリム角を前記最適なトリム角とするステップを含み、
前記(c)ステップは、
前記トリム変更量に基づいて、前記バラストの変動量を算出するステップを含む
航走トリム自動変更方法。
【請求項13】
請求項12に記載の航走トリム自動変更方法において、さらに、
(f)航行時の船舶の状態を示す航行データを蓄積するステップを備え、
前記(f)ステップは、
過去の海象と、前記過去の海象のときのトリム角と、前記過去の海象のとき燃料消費量とを関係付けて前記航行データとして蓄積するステップを含み、
前記トリム変更量を算出するステップは、
前記抵抗増加量特性データベースまたは前記データ蓄積部の前記航行データの少なくとも一方を参照して、前記複数のトリム角のうちの前記船舶の抵抗の増加量が最小のトリム角を前記最適なトリム角とするステップを含む
航走トリム自動変更方法。
【請求項1】
現在の海象に対応して船舶の波浪中抵抗増加量を減少させるための最適なトリム角を導出する最適トリム角導出部と、
航走する船舶の現在のトリム角を計測するトリム角計測部と、
前記現在のトリム角を前記最適なトリム角に遷移させるためのバラストの変動量を算出するバラスト変動演算部と
を具備する
航走トリム自動変更システム。
【請求項2】
請求項1に記載の航走トリム自動変更システムにおいて、さらに、
前記船舶に備えられたバラストタンクのバラストの状態を制御するバラスト制御部を備え、
前記バラスト制御部は、
前記バラストの変動量に基づいて、前記バラストタンクのバラストの状態を変更する
航走トリム自動変更システム。
【請求項3】
請求項1または2に記載の航走トリム自動変更システムにおいて、さらに、
前記現在の海象を示す海象データを生成する海象特定部を備え、
前記最適トリム角導出部は、
前記海象特定部から供給された前記海象データに基づいて、前記最適なトリム角を導出する
航走トリム自動変更システム。
【請求項4】
請求項3に記載の航走トリム自動変更システムにおいて、
前記海象特定部は、
波高計によって得られた波高データ、または、上空からの画像データの解析によって得られた解析データを前記海象データとする
航走トリム自動変更システム。
【請求項5】
請求項1から4のいずれか1項に記載の航走トリム自動変更システムにおいて、
前記最適トリム角導出部は、
前記船舶の抵抗の増加量と海象との関連性を複数のトリム角の各々に対応して保持する抵抗増加量特性データベースと、
前記最適なトリム角と前記現在のトリム角との差分を示すトリム変更量を算出するトリム変更量演算部と
を備え、
前記トリム変更量演算部は、
前記抵抗増加量特性データベースを参照して、前記複数のトリム角のうちの、前記船舶の抵抗の増加量が最小のトリム角を前記最適なトリム角とし、
前記バラスト変動演算部は、
前記トリム変更量に基づいて、前記バラストの変動量を算出する
航走トリム自動変更システム。
【請求項6】
請求項5に記載の航走トリム自動変更システムにおいて、
前記最適トリム角導出部は、さらに、
航行時の船舶の状態を示す航行データを蓄積するデータ蓄積部を備え、
前記データ蓄積部は、
過去の海象と、前記過去の海象のときのトリム角と、前記過去の海象のとき燃料消費量とを関係付けて前記航行データとして保持し、
前記トリム変更量演算部は、
前記抵抗増加量特性データベースまたは前記データ蓄積部の前記航行データの少なくとも一方を参照して、前記複数のトリム角のうちの前記船舶の抵抗の増加量が最小のトリム角を前記最適なトリム角とする
航走トリム自動変更システム。
【請求項7】
請求項1から6のいずれか1項に記載の航走トリム自動変更システムを備えた
船。
【請求項8】
(a)現在の海象に対応して船舶の最適なトリム角を導出するステップと、
(b)航走する船舶の現在のトリム角を計測するステップと、
(c)前記現在のトリム角を前記最適なトリム角に遷移させるためのバラストの変動量を算出するステップと
を具備する
航走トリム自動変更方法。
【請求項9】
請求項8に記載の航走トリム自動変更方法において、さらに、
(d)前記船舶に備えられたバラストタンクのバラストの状態を制御するステップを備え、
前記(d)ステップは、
前記バラストの変動量に基づいて、前記バラストタンクのバラストの状態を変更するステップを含む
航走トリム自動変更方法。
【請求項10】
請求項8または9に記載の航走トリム自動変更方法において、さらに、
(e)前記現在の海象を示す海象データを生成するステップを備え、
前記(a)ステップは、
前記(e)ステップを実行することによって得られた前記海象データに基づいて、前記最適なトリム角を導出するステップを含む
航走トリム自動変更方法。
【請求項11】
請求項10に記載の航走トリム自動変更方法において、
前記(e)ステップは、
波高計によって得られた波高データ、または、上空からの画像データの解析によって得られた解析データを前記海象データとするステップを含む
航走トリム自動変更方法。
【請求項12】
請求項8から11のいずれか1項に記載の航走トリム自動変更方法において、
前記(a)ステップは、
前記最適なトリム角と前記現在のトリム角との差分を示すトリム変更量を算出するステップを備え、
前記トリム変更量を算出するステップは、
前記前記船舶の抵抗の増加量と海象との関連性とが、複数のトリム角の各々に対応して保持されている抵抗増加量特性データベースを参照して、前記複数のトリム角のうちの、前記船舶の抵抗の増加量が最小のトリム角を前記最適なトリム角とするステップを含み、
前記(c)ステップは、
前記トリム変更量に基づいて、前記バラストの変動量を算出するステップを含む
航走トリム自動変更方法。
【請求項13】
請求項12に記載の航走トリム自動変更方法において、さらに、
(f)航行時の船舶の状態を示す航行データを蓄積するステップを備え、
前記(f)ステップは、
過去の海象と、前記過去の海象のときのトリム角と、前記過去の海象のとき燃料消費量とを関係付けて前記航行データとして蓄積するステップを含み、
前記トリム変更量を算出するステップは、
前記抵抗増加量特性データベースまたは前記データ蓄積部の前記航行データの少なくとも一方を参照して、前記複数のトリム角のうちの前記船舶の抵抗の増加量が最小のトリム角を前記最適なトリム角とするステップを含む
航走トリム自動変更方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2011−105047(P2011−105047A)
【公開日】平成23年6月2日(2011.6.2)
【国際特許分類】
【出願番号】特願2009−259293(P2009−259293)
【出願日】平成21年11月12日(2009.11.12)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【公開日】平成23年6月2日(2011.6.2)
【国際特許分類】
【出願日】平成21年11月12日(2009.11.12)
【出願人】(000006208)三菱重工業株式会社 (10,378)
[ Back to top ]