
船体磁気測定システム
【課題】船体の発生磁気モーメントを正確に算出できる船体磁気測定システムを提供する。
【解決手段】測定処理が開始されると、測定終了タイムとなるまで、船体6に設置された運動センサ9により、船体6のピッチング角Θ、ローリング角Φ、ヘッデイング角Ψを測定し(ST2)、かつ磁気検知器3からの船体6の相対位置x、y、zと、磁気検知器3による磁気Bx、By、Bzを測定し(ST3,ST4)、測定終了で、相対位置x,y,zと測定磁気Bx、By、Bzから磁気モーメントMx、My、Mzを算出し(ST6)、さらに、前記動揺角Θ、Φ、Ψを考慮して補正した演算を行い、船体の固有の磁気モーメントMl,Ma,Mvを算出する(ST7)。
【解決手段】測定処理が開始されると、測定終了タイムとなるまで、船体6に設置された運動センサ9により、船体6のピッチング角Θ、ローリング角Φ、ヘッデイング角Ψを測定し(ST2)、かつ磁気検知器3からの船体6の相対位置x、y、zと、磁気検知器3による磁気Bx、By、Bzを測定し(ST3,ST4)、測定終了で、相対位置x,y,zと測定磁気Bx、By、Bzから磁気モーメントMx、My、Mzを算出し(ST6)、さらに、前記動揺角Θ、Φ、Ψを考慮して補正した演算を行い、船体の固有の磁気モーメントMl,Ma,Mvを算出する(ST7)。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、航行する艦艇等の船体が発する磁気を測定する船体磁気測定システムに関する。
【背景技術】
【0002】
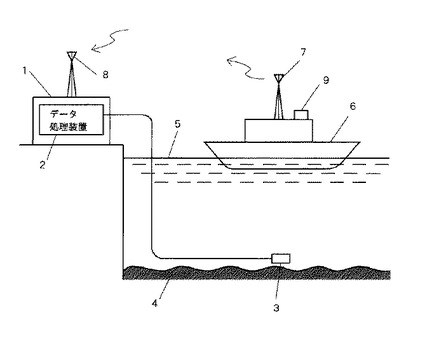
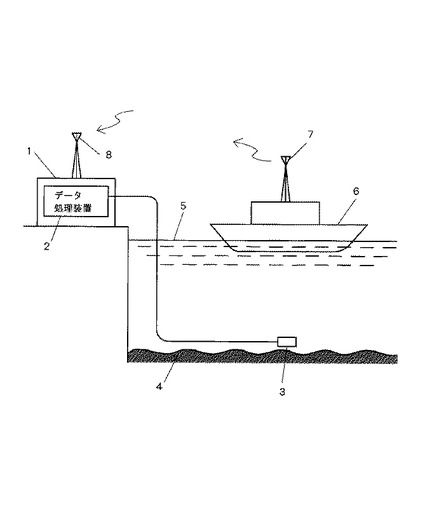
一般に、艦艇等の船舶の船体から発生する磁気を測定して評価するのに、図7に示すように、海底4に設置する3軸の磁気検知器3で、その海域5に停泊あるいは航行してくる船舶6の発生する磁界を計測する一方、その船舶6と磁気検知器3との相対的な位置関係を、船舶6の船体上あるいは管理棟1に設けたレーザ光源を用いた測距方式で計測する。この船舶6と磁気検知器3との相対的な位置関係は、GPSを用いて測定する場合もある。この計測した相対位置データを、船舶6上のアンテナ7から、陸上に設けた管理棟1のアンテナ8に送信し、あるいは管理棟1で得られ、管理棟1のデータ処理装置2で、磁気検知器3で検知した測定磁界と、船体6と磁気検知器3の相対距離とから、船舶6の磁気モーメントを逆計算し、得られた磁気モーメントから、消磁基準と比較する基準の水深に水深換算なども行い、その基準水準の点の磁界を計算し、消磁基準と比較することでで、船体磁気の評価を行うようにしている(例えば特許文献1参照)。
【0003】
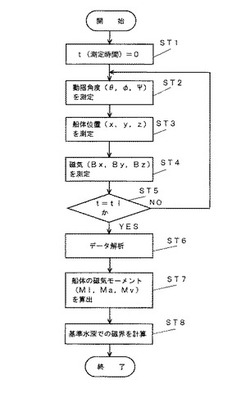
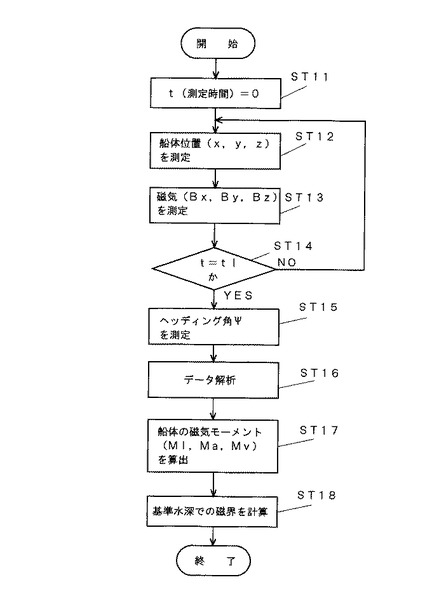
従来の船体磁気測定システムにおいて、測定処理の一例を図8に示すフロー図を参照し、概要を説明する。処理が開始されると測定時間tを0とし(ステップST11)、続いて、ステップST12において、磁気検知器3に対する船体6の位置を計測し、船位(x、y、z)を得るとともに、磁気検知器3により、磁気(Bx、By、Bz)を測定する(ステップST13)。次に時間tがtl(測定終了タイム)か否かを判定し(ステップST14)、t=tlでない場合は、ステップST12にもどり、船位及び磁気の測定を時間の経過とともに繰り返す。
【0004】
時間tがtlに達すると、すなわち測定終了タイムとなると、次に船舶の進行方向に対する船首尾方向のズレ角、つまりヘッデイング角Ψを測定する(ステップST15)。続いてステップST16へ移行し、データ解析を行い、磁気モーメントMx,My、Mzを次式〔1〕を解いて求める。
【0005】
【数1】

【0006】
さらに式〔2〕より、ヘッデイング角Ψの補正で、船体の磁気モーメント(Ml,Ma、Mv)を算出する(ステップST17)。そして求めた磁気モデルによる基準水深における磁界を計算し(ステップST18)、この基準水深での磁界と基準磁界を比較して、船体の磁気評価を行う。
【0007】
【数2】
【特許文献1】特公平5−33352号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
上記した船体磁気測定システムで、実際に航行中の船舶を測定する場合、波浪などにより連続的に動揺し、ヘッデイング角度などは、時間によって変化する。この動揺が測定磁界に影響を及ぼす。従来は、この動揺による補正用の角度は、ヘッデイング角のみで、しかも1回の測定データしか与えられないため、磁気モーメントは正確に求めることが出来ない。つまり、測定時に船舶の動揺が大きい場合、船体磁気を正確に評価できない、という問題がある。
【0009】
この発明は、上記問題点に着目してなされたものであって、船体の発生磁気モーメントを正確に算出できる船体磁気測定システムを提供することを目的とする。
【課題を解決するための手段】
【0010】
この発明の船体磁気測定システムは、被測定船体からの磁界を3軸磁気検知器で検知し、この検知磁界と被測定船体に対する磁気検知器の距離とから被測定船体の発生磁界を測定するシステムにおいて、前記被測定船体に備える船体のピッチング角、ローリング角及びヘッデイング角を求める運動センサと、この運動センサで求めるピッチング角、ローリング角及びヘッデイング角により前記被測定船体の発生磁界の補正演算を行う手段とを、備える。
【発明の効果】
【0011】
この発明によれば、船舶の停泊中あるいは航行中にピッチング角、ローリング角、及びヘッデイング角を運動センサで測定し、磁気モーメントを逆算する際に、その都度、動揺角度で補正するので、より正確に船舶の磁気モーメントを算出することができ、結果として、正確に船舶の評価を行うことが出来る。
【発明を実施するための最良の形態】
【0012】
以下実施の形態により、この発明をさらに詳細に説明する。図1は、この発明の一実施形態である船体磁気測定システムの概略構成を示す図である。
【0013】
この実施形態システムにおいては、海底4に3軸の磁気検知器3を備え、海域5に船舶6が停泊、または航過する際に、磁気検知器3で磁界を測定し、陸上の管理棟1に設けるデータ処理装置2に取り込み、船舶6と管理棟1との間でアンテナ7,8を介して、データの授受を行う。そして、デ−タ処理装置2において、磁気検知器3で検知した測定磁界と船体6と磁気検知器3の相対距離から船舶6の磁気モーメントを算出する機能を備えている。もっとも、これらの機能・構成は、図7に示す従来のシステムと同様である。
【0014】
この実施形態システムでは、船舶6上に運動センサ9を備えている。船舶6は航行中に、常に同一姿勢ではなく、進行方向、鉛直方向、左右舷方向に動揺する。この、動揺は、図6を参照し次のように定義される。
【0015】
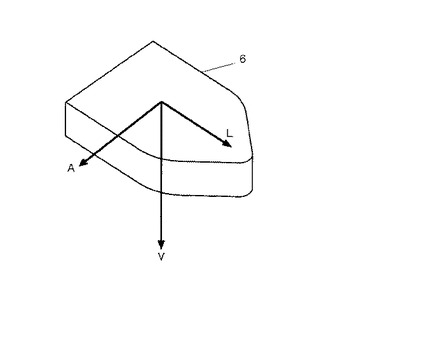
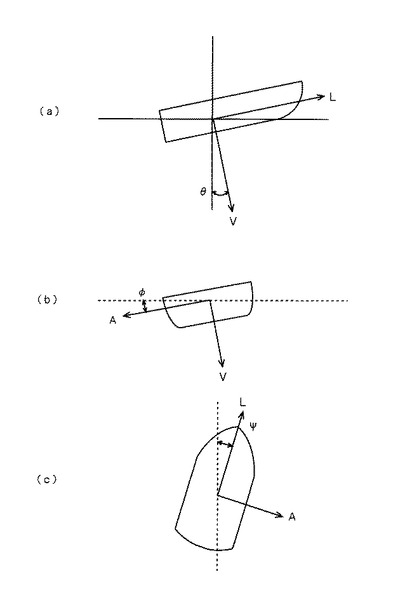
今、船舶6の船首尾方向L、左右舷方向A、鉛直方向をMとする(図5参照)。図6の(a)に示すように、船体6が船首尾方向に上下動し、動揺した時の、船体6の垂直線と鉛直方向のなす角θをピッチング角と定義される。また、図6の(b)に示すように船舶6が左右舷方向に振動し、水平線に対する船舶6の左右舷方向Aとなす角Φをローリング角と定義される。さらに、図6の(c)に示すように、船舶6の進行方向に対する船首尾方向Lの振動により、両者のなす角Ψをヘッデイング角と定義される。
【0016】
運動センサ9は、必要なタイミングに連続して、ピッチング角Θ、ローリング角Φ、ヘッデイング角Ψを測定する。測定した各動揺角は、アンテナ7,8を介して,管理棟1のデータ処理装置2に送信される。
【0017】
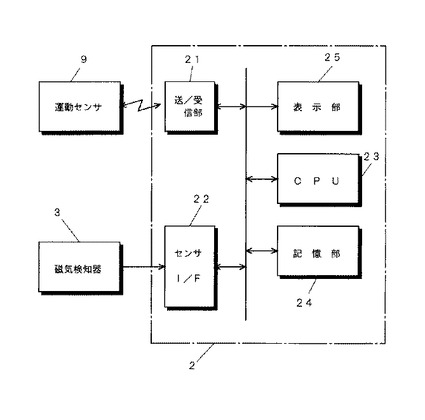
図2に、上記実施形態船体磁気測定システムの回路構成であるブロック図を示す。データ処理装置2は、送/受信部21、センサI/F22、CPU23、記憶部24、及び表示部25を備えている。送/受信部21は無線で航行中の船舶6とデータの授受が可能であり、例えば運動センサ9が検出したピッチング角Θ、ローリング角Φ、ヘッデイング角Ψ等の動揺角データを受信し、記憶部24に、その受信データを記憶する。磁気検知器3で検知された3軸磁界Bx,By、Bzは、センサI/F22を介して記憶部24に、その受信データが記憶される。CPU23は、記憶部24に記憶された3軸磁気データ及び船舶6と磁気検知器3との相対的距離r及び動揺角を用いて船舶6の磁気モーメントMx、My,Mzを算出する。
【0018】
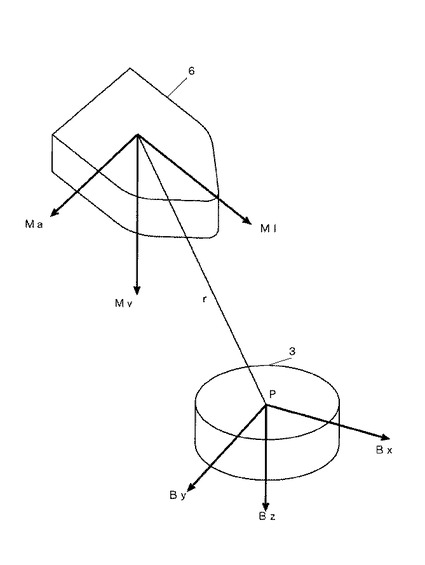
船舶6と磁気検知器3の相対距離は図4に示すようにrとすると、磁気検知器3によって測定される磁界Bx,By,Bz(T)は、磁気検知器3の位置Pを基準とする船舶6の座標(x,y,z)(m)と、船舶船6の磁気モーメントMx,My,Mz(wb・m)を用いて次式〔3〕で計算することが出来る。
【0019】
【数3】
【0020】
ここで、船舶6の固有の磁気モーメントを、Ml、Ma、Mvとすると、動揺角を考慮した磁気モーメントMx、My、Mzの値は、以下の式〔4〕で表せる。
【0021】
【数4】
【0022】
この式により、逆算して、Ml,Ma、Mvを求めることが出来る。これにより、航行中の船舶6が動揺しても動揺角に補正がなされ、正確に船体固有の磁気モーメントMl,Ma,Mvを求めることが出来る。
【0023】
この、実施形態システムにおいて、磁気測定、及び評価をおこなうときは、図3に示す
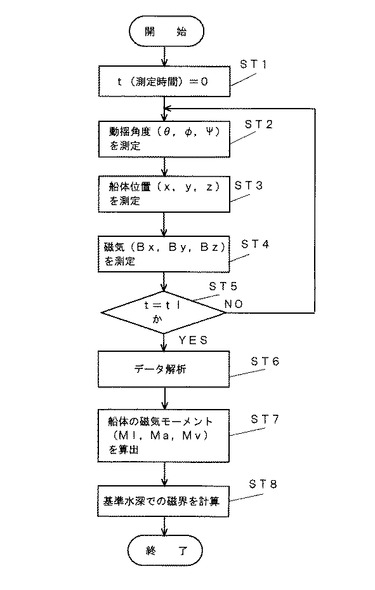
フロー図に示す処理を実行する。データ処理装置2では、この処理ルーチンに入ると、ステップST1において、t(測定時間)を0とする。次にステップST2へ移行する。ステップST2においては、船舶6上の運動センサ9によりピッチング角Θ、ローリング角Φ、ヘッデイング角Ψを測定し、記憶部24に記憶する。次に、ステップST3へ移行する。
【0024】
ステップST3においては、レーザ測距方式により、船体6と磁気検知器3の相対位置(x、y、z)を算出し、記憶部24に記憶する。続いてステップST4へ移行する。ステップST4においては、磁気検知器3により、船舶6から相対距離r離れた検知器設置位置の磁界(Bx、By、Bz)を測定する。この磁界測定値も記憶部24に記憶する。次にステップST5へ移行する。
【0025】
ステップST5においては、測定時間t=tlか?つまり測定終了か否か判定する。測定時間tが測定終了タイムtlに達していず、測定終了でない場合は、ステップST2にもどり、次のサンプルタイムのステップST2〜ステップST5の処理を、実行する。一方、ステップST5において測定終了が判定されると、ステップST6へ移行する。
【0026】
ステップST6においては、上記得られたデータによりデータ解析をおこない、船舶6の磁気モデルを計算する。すなわち、上記処理によって求めた磁界Bx,By,Bzと、船舶6から相対距離rとにより、船舶6からの磁気モーメントMx,My,Mzを算出する。そして、ステップST7へ移行する。ステップST7においては、上記ピッチング角Θ、ローリング角Φ、ヘッデイング角Ψとを式〔4〕に入れ、この〔4〕式を解いて、船舶6の固有の磁気モーメントMl、Ma,Mvを算出する。次ステップST8へ移行する。
【0027】
ステップST8においては、その船舶の種類に応じた基準水深での磁界を、上記磁気モデル、つまり船舶6の固有の磁気モーメントMl、Ma,Mvより、算出する。この磁界と基準磁界との比較などにより、船体磁気評価をおこなう。
【0028】
なお、上記実施形態において、ステップST2〜ST5においては、測定データを得ながら記憶部24に記憶しているが、これら測定データは、予め測定値を記億部24に記憶しておき、磁気モデルを計算する処理ルーチンに入ると、ステップ゜ST2〜ST4において、それぞれ記憶部24に記憶しているデータを読み出すようにしてもよい。
【図面の簡単な説明】
【0029】
【図1】この発明の一実施形態船体磁気測定システムを説明する概略図である。
【図2】上記実施形態船体磁気測定システムの回路構成を示すブロック図である。
【図3】上記実施形態船体磁気測定システムの処理動作説明するフロー図である。
【図4】船体の磁気モーメントと、この磁気モーメントによる磁気検知器位置の磁界を説明する図である。
【図5】船体の鉛直方向磁気、船首尾方向の磁気、及左右舷方向の磁気を説明する図である。
【図6】船体のピッチング角、ローリング角、ヘッデイング角を説明する図である。
【図7】従来の船体磁気測定システムを説明する概略図である。
【図8】従来の船体磁気測定システムの処理動作の概要を説明するフロー図である。
【符号の説明】
【0030】
1 管理棟
2 データ処理装置
3 3軸磁気検知器
4 海底
5 海域
6 船舶
・ アンテナ
9 運動センサ
21 送/受信部
22 センサI/F部
23 CPU
24 記憶部
25 表示部
【技術分野】
【0001】
この発明は、航行する艦艇等の船体が発する磁気を測定する船体磁気測定システムに関する。
【背景技術】
【0002】
一般に、艦艇等の船舶の船体から発生する磁気を測定して評価するのに、図7に示すように、海底4に設置する3軸の磁気検知器3で、その海域5に停泊あるいは航行してくる船舶6の発生する磁界を計測する一方、その船舶6と磁気検知器3との相対的な位置関係を、船舶6の船体上あるいは管理棟1に設けたレーザ光源を用いた測距方式で計測する。この船舶6と磁気検知器3との相対的な位置関係は、GPSを用いて測定する場合もある。この計測した相対位置データを、船舶6上のアンテナ7から、陸上に設けた管理棟1のアンテナ8に送信し、あるいは管理棟1で得られ、管理棟1のデータ処理装置2で、磁気検知器3で検知した測定磁界と、船体6と磁気検知器3の相対距離とから、船舶6の磁気モーメントを逆計算し、得られた磁気モーメントから、消磁基準と比較する基準の水深に水深換算なども行い、その基準水準の点の磁界を計算し、消磁基準と比較することでで、船体磁気の評価を行うようにしている(例えば特許文献1参照)。
【0003】
従来の船体磁気測定システムにおいて、測定処理の一例を図8に示すフロー図を参照し、概要を説明する。処理が開始されると測定時間tを0とし(ステップST11)、続いて、ステップST12において、磁気検知器3に対する船体6の位置を計測し、船位(x、y、z)を得るとともに、磁気検知器3により、磁気(Bx、By、Bz)を測定する(ステップST13)。次に時間tがtl(測定終了タイム)か否かを判定し(ステップST14)、t=tlでない場合は、ステップST12にもどり、船位及び磁気の測定を時間の経過とともに繰り返す。
【0004】
時間tがtlに達すると、すなわち測定終了タイムとなると、次に船舶の進行方向に対する船首尾方向のズレ角、つまりヘッデイング角Ψを測定する(ステップST15)。続いてステップST16へ移行し、データ解析を行い、磁気モーメントMx,My、Mzを次式〔1〕を解いて求める。
【0005】
【数1】
【0006】
さらに式〔2〕より、ヘッデイング角Ψの補正で、船体の磁気モーメント(Ml,Ma、Mv)を算出する(ステップST17)。そして求めた磁気モデルによる基準水深における磁界を計算し(ステップST18)、この基準水深での磁界と基準磁界を比較して、船体の磁気評価を行う。
【0007】
【数2】
【特許文献1】特公平5−33352号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
上記した船体磁気測定システムで、実際に航行中の船舶を測定する場合、波浪などにより連続的に動揺し、ヘッデイング角度などは、時間によって変化する。この動揺が測定磁界に影響を及ぼす。従来は、この動揺による補正用の角度は、ヘッデイング角のみで、しかも1回の測定データしか与えられないため、磁気モーメントは正確に求めることが出来ない。つまり、測定時に船舶の動揺が大きい場合、船体磁気を正確に評価できない、という問題がある。
【0009】
この発明は、上記問題点に着目してなされたものであって、船体の発生磁気モーメントを正確に算出できる船体磁気測定システムを提供することを目的とする。
【課題を解決するための手段】
【0010】
この発明の船体磁気測定システムは、被測定船体からの磁界を3軸磁気検知器で検知し、この検知磁界と被測定船体に対する磁気検知器の距離とから被測定船体の発生磁界を測定するシステムにおいて、前記被測定船体に備える船体のピッチング角、ローリング角及びヘッデイング角を求める運動センサと、この運動センサで求めるピッチング角、ローリング角及びヘッデイング角により前記被測定船体の発生磁界の補正演算を行う手段とを、備える。
【発明の効果】
【0011】
この発明によれば、船舶の停泊中あるいは航行中にピッチング角、ローリング角、及びヘッデイング角を運動センサで測定し、磁気モーメントを逆算する際に、その都度、動揺角度で補正するので、より正確に船舶の磁気モーメントを算出することができ、結果として、正確に船舶の評価を行うことが出来る。
【発明を実施するための最良の形態】
【0012】
以下実施の形態により、この発明をさらに詳細に説明する。図1は、この発明の一実施形態である船体磁気測定システムの概略構成を示す図である。
【0013】
この実施形態システムにおいては、海底4に3軸の磁気検知器3を備え、海域5に船舶6が停泊、または航過する際に、磁気検知器3で磁界を測定し、陸上の管理棟1に設けるデータ処理装置2に取り込み、船舶6と管理棟1との間でアンテナ7,8を介して、データの授受を行う。そして、デ−タ処理装置2において、磁気検知器3で検知した測定磁界と船体6と磁気検知器3の相対距離から船舶6の磁気モーメントを算出する機能を備えている。もっとも、これらの機能・構成は、図7に示す従来のシステムと同様である。
【0014】
この実施形態システムでは、船舶6上に運動センサ9を備えている。船舶6は航行中に、常に同一姿勢ではなく、進行方向、鉛直方向、左右舷方向に動揺する。この、動揺は、図6を参照し次のように定義される。
【0015】
今、船舶6の船首尾方向L、左右舷方向A、鉛直方向をMとする(図5参照)。図6の(a)に示すように、船体6が船首尾方向に上下動し、動揺した時の、船体6の垂直線と鉛直方向のなす角θをピッチング角と定義される。また、図6の(b)に示すように船舶6が左右舷方向に振動し、水平線に対する船舶6の左右舷方向Aとなす角Φをローリング角と定義される。さらに、図6の(c)に示すように、船舶6の進行方向に対する船首尾方向Lの振動により、両者のなす角Ψをヘッデイング角と定義される。
【0016】
運動センサ9は、必要なタイミングに連続して、ピッチング角Θ、ローリング角Φ、ヘッデイング角Ψを測定する。測定した各動揺角は、アンテナ7,8を介して,管理棟1のデータ処理装置2に送信される。
【0017】
図2に、上記実施形態船体磁気測定システムの回路構成であるブロック図を示す。データ処理装置2は、送/受信部21、センサI/F22、CPU23、記憶部24、及び表示部25を備えている。送/受信部21は無線で航行中の船舶6とデータの授受が可能であり、例えば運動センサ9が検出したピッチング角Θ、ローリング角Φ、ヘッデイング角Ψ等の動揺角データを受信し、記憶部24に、その受信データを記憶する。磁気検知器3で検知された3軸磁界Bx,By、Bzは、センサI/F22を介して記憶部24に、その受信データが記憶される。CPU23は、記憶部24に記憶された3軸磁気データ及び船舶6と磁気検知器3との相対的距離r及び動揺角を用いて船舶6の磁気モーメントMx、My,Mzを算出する。
【0018】
船舶6と磁気検知器3の相対距離は図4に示すようにrとすると、磁気検知器3によって測定される磁界Bx,By,Bz(T)は、磁気検知器3の位置Pを基準とする船舶6の座標(x,y,z)(m)と、船舶船6の磁気モーメントMx,My,Mz(wb・m)を用いて次式〔3〕で計算することが出来る。
【0019】
【数3】
【0020】
ここで、船舶6の固有の磁気モーメントを、Ml、Ma、Mvとすると、動揺角を考慮した磁気モーメントMx、My、Mzの値は、以下の式〔4〕で表せる。
【0021】
【数4】
【0022】
この式により、逆算して、Ml,Ma、Mvを求めることが出来る。これにより、航行中の船舶6が動揺しても動揺角に補正がなされ、正確に船体固有の磁気モーメントMl,Ma,Mvを求めることが出来る。
【0023】
この、実施形態システムにおいて、磁気測定、及び評価をおこなうときは、図3に示す
フロー図に示す処理を実行する。データ処理装置2では、この処理ルーチンに入ると、ステップST1において、t(測定時間)を0とする。次にステップST2へ移行する。ステップST2においては、船舶6上の運動センサ9によりピッチング角Θ、ローリング角Φ、ヘッデイング角Ψを測定し、記憶部24に記憶する。次に、ステップST3へ移行する。
【0024】
ステップST3においては、レーザ測距方式により、船体6と磁気検知器3の相対位置(x、y、z)を算出し、記憶部24に記憶する。続いてステップST4へ移行する。ステップST4においては、磁気検知器3により、船舶6から相対距離r離れた検知器設置位置の磁界(Bx、By、Bz)を測定する。この磁界測定値も記憶部24に記憶する。次にステップST5へ移行する。
【0025】
ステップST5においては、測定時間t=tlか?つまり測定終了か否か判定する。測定時間tが測定終了タイムtlに達していず、測定終了でない場合は、ステップST2にもどり、次のサンプルタイムのステップST2〜ステップST5の処理を、実行する。一方、ステップST5において測定終了が判定されると、ステップST6へ移行する。
【0026】
ステップST6においては、上記得られたデータによりデータ解析をおこない、船舶6の磁気モデルを計算する。すなわち、上記処理によって求めた磁界Bx,By,Bzと、船舶6から相対距離rとにより、船舶6からの磁気モーメントMx,My,Mzを算出する。そして、ステップST7へ移行する。ステップST7においては、上記ピッチング角Θ、ローリング角Φ、ヘッデイング角Ψとを式〔4〕に入れ、この〔4〕式を解いて、船舶6の固有の磁気モーメントMl、Ma,Mvを算出する。次ステップST8へ移行する。
【0027】
ステップST8においては、その船舶の種類に応じた基準水深での磁界を、上記磁気モデル、つまり船舶6の固有の磁気モーメントMl、Ma,Mvより、算出する。この磁界と基準磁界との比較などにより、船体磁気評価をおこなう。
【0028】
なお、上記実施形態において、ステップST2〜ST5においては、測定データを得ながら記憶部24に記憶しているが、これら測定データは、予め測定値を記億部24に記憶しておき、磁気モデルを計算する処理ルーチンに入ると、ステップ゜ST2〜ST4において、それぞれ記憶部24に記憶しているデータを読み出すようにしてもよい。
【図面の簡単な説明】
【0029】
【図1】この発明の一実施形態船体磁気測定システムを説明する概略図である。
【図2】上記実施形態船体磁気測定システムの回路構成を示すブロック図である。
【図3】上記実施形態船体磁気測定システムの処理動作説明するフロー図である。
【図4】船体の磁気モーメントと、この磁気モーメントによる磁気検知器位置の磁界を説明する図である。
【図5】船体の鉛直方向磁気、船首尾方向の磁気、及左右舷方向の磁気を説明する図である。
【図6】船体のピッチング角、ローリング角、ヘッデイング角を説明する図である。
【図7】従来の船体磁気測定システムを説明する概略図である。
【図8】従来の船体磁気測定システムの処理動作の概要を説明するフロー図である。
【符号の説明】
【0030】
1 管理棟
2 データ処理装置
3 3軸磁気検知器
4 海底
5 海域
6 船舶
・ アンテナ
9 運動センサ
21 送/受信部
22 センサI/F部
23 CPU
24 記憶部
25 表示部
【特許請求の範囲】
【請求項1】
被測定船体からの磁界を3軸磁気検知器で検知し、この検知磁界と被測定船体に対する磁気検知器の距離とから被測定船体の発生磁界を測定する船体磁気測定システムにおいて、
前記被測定船体に備える船体のピッチング角、ローリング角及びヘッデイング角を求める運動センサと、この運動センサで求めるピッチング角、ローリング角及びヘッデイング角により前記被測定船体の発生磁界の補正演算を行う手段とを、備えることを特徴とする船体磁気測定システム。
【請求項1】
被測定船体からの磁界を3軸磁気検知器で検知し、この検知磁界と被測定船体に対する磁気検知器の距離とから被測定船体の発生磁界を測定する船体磁気測定システムにおいて、
前記被測定船体に備える船体のピッチング角、ローリング角及びヘッデイング角を求める運動センサと、この運動センサで求めるピッチング角、ローリング角及びヘッデイング角により前記被測定船体の発生磁界の補正演算を行う手段とを、備えることを特徴とする船体磁気測定システム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2007−3260(P2007−3260A)
【公開日】平成19年1月11日(2007.1.11)
【国際特許分類】
【出願番号】特願2005−181618(P2005−181618)
【出願日】平成17年6月22日(2005.6.22)
【出願人】(000001993)株式会社島津製作所 (3,708)
【Fターム(参考)】
【公開日】平成19年1月11日(2007.1.11)
【国際特許分類】
【出願日】平成17年6月22日(2005.6.22)
【出願人】(000001993)株式会社島津製作所 (3,708)
【Fターム(参考)】
[ Back to top ]