
船舶の制御システムを検査するための方法及びシステム
船舶(4)の制御システム(2)を検証するための方法であって、上記制御システム(2)は、その動作状態において、センサ(8)からのセンサ信号(7)及びコマンド入力装置(10)からのコマンド信号(9)を受信するとともに、応答として、制御信号(13)をアクチュエータ(3)に対して供給することにより、上記船舶(4)の所望の位置、速度、進路又は他の状態を維持する方法において、時間(t0)中に、実際のセンサ信号(実センサ信号)(7a、7b、7c、……)の受信を切り離して、上記実際のセンサ信号を、検査信号源(41)からの人工の測定値(7a’、7b’、7c’、……)の検査シーケンス(T0)と置き換えるステップと、人工のセンサ信号(7、7’)に基づいて上記制御システム(2)を機能させて、上記第1の時間(t0)における上記第1の検査シーケンス(T0)に対する応答(SO)として制御信号ロガー(42)に記録される制御信号(13’)を生成するステップと、検査シーケンス(T0)に対する応答(S0)を上記制御システム(2)の「署名」応答(S0)として記憶するステップとを含み、その後の時間(t1、t2、t3、……)において、制御システム(2)に対して入力される検査シーケンス(T0)を使用して、その後の応答(S1、S2、S3、……)を記録するとともに、上記その後の応答(S1、S2、S3、……)が署名応答(S0)にほぼ類似しているかどうかを決定して、上記制御システム(2)が変更されているか否かを検証するという目的をもっていることを特徴とする方法。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、クラス協会による検査及び/又は認証によって船舶を認可した後に検証可能な制御システムの署名を取得するためのシステムに関する。また、本発明は、船舶の遠隔検査、及び、2つの方法の組み合わせ、すなわち、制御システム署名の遠隔取得に関する。更に、遠隔制御される検査及び船舶シミュレーションのためのシステムが提供される。
【背景技術】
【0002】
制御システムは、一般に、物理的プロセスに対して制御信号を供給し且つ装置又は物理的プロセスから、可能であれば他の物理的プロセスから測定値を受けるシステムと見なすことができる。制御信号を計算するために測定値及びアルゴリズムが使用され、それにより、物理的なシステムが所望通りに応答する。物理的プロセスがモータ駆動の船舶である場合、制御システムは、船舶位置、進路、速度の形態を成す測定値を受けてもよく、また、それによりプロペラ及び方向舵への制御信号を計算することができ、その結果、1つ又はそれ以上の船舶位置、進路、速度が得られ或いは維持される。
【0003】
(課題説明)
この場合には、船舶の形態を成す物理的プロセスは、風、波、潮流の変化などの外的な事象によって、或いは、1つ又はそれ以上のプロペラにおけるモータ出力の損失及び方向舵の機能の故障等の非外的事象によって影響される場合がある。船舶における制御システムは、船舶が安全な状態を維持できるように外的影響及び外的事象を処理可能であることが望まれ且つ期待される。安全な状態は、例えば、船舶が所望の位置又は速度を維持する状態、船舶が望ましくない位置を回避する(衝突又は座礁を回避するため)状態、船舶が制御されていないドリフトの状況を回避する状態、船舶が所望の進路を維持する状態等であってもよい。また、センサ信号損失又はセンサのエラーの場合に、ロールセンサ又はピッチセンサの実際の信号の損失に応じてバラストポンピングが突然に変化し、或いは、位置の明らかなエラーを突然に修正するといった望ましくない不適切な補償を制御システムが行なわないことが期待される。
【0004】
(制御システムの測定)
測定値を与える機器からの入力部と、制御信号が与えられるべきプロペラ装置、操舵面、他の制御装置といったアクチュエータへの出力部とを有する船用の制御システムが図1及び図3に示されている。このタイプの制御システムは、以下に示す多数のソースからセンサ信号の形態を成す測定値を受けることができる:
− ロール/ピッチ/縦揺れセンサ
− 相対風速及び風向を測定するための風速計
− ジャイロコンパス
− GPSセンサ又はGPS位置決めシステム
− 加速度測定値に基づいて時間に関して積分することにより速度を計算し、時間に関して2回積分することにより位置を計算する慣性航法システム
− 海底の固定点に関連する水中音響位置センサ
− 船舶から海底の複数の点までの1つ又はそれ以上のテンションワイヤの方向及び長さが観察されるトートワイヤシステム
− 船舶の進路の変化又は所望の進路、所望の位置、又は、所望の速度に関するコマンド信号
− プロペラ及びモータにおけるシャフト速度及び負荷
− 方向舵角度センサ
− 船荷タンクのためのレベルセンサ
− バラストレベルセンサ
− 燃料レベルセンサ
− エンジン状態、冷却水温度、冷却水バルブ、潤滑油の圧力及びレベルなど。
制御システムは、プロペラなどのアクチュエータ、操舵面、他の制御装置に対して制御信号を与えなければならない。プロパルサは、通常のプロペラ、トンネルスラスタ、アジマススラスタ、ウォータジェットであってもよく、また、一部の船舶においては、船舶を正しい位置まで引張るように構成された係留システムであってもよい。操舵面は、操縦用の方向舵、及び、波の動きを減衰させ或いは波の動きに対抗するためのアクティブホイルを含む。また、制御信号は、バラストポンプ、ロール角やピッチ角を修正するための関連するバルブなどの他の制御装置に対して与えることもできる。
【0005】
(動的位置決めDPのための制御に伴う問題)
船舶が石油掘削船又はプラットフォーム製造船、例えば掘削船や掘削プラットフォーム、石油製造船又は石油製造プラットフォームである場合には、制御システムは、縦揺れ加速度計から縦揺れ動作の測定値を受けてもよく、また、ライザ、ドリルストリング、クレーン等のための能動的縦揺れ補償システムに対して制御信号を出力してもよい。この場合、海底に機械的装置を接続することができ、また、船舶の動き、特に縦揺れを補償することが重要となり得る。海上での石油活動のための制御システムの通常の使用は、船舶の動的な位置決めのためである。すなわち、船舶は、アジマススラスタなどのアクチュエータを使用して、掘削中又は石油製造中に所望の位置を維持する。また、係留され且つ海底へ延びる係留ラインと共に回転タレットを中心に回転することができる船舶は、プロペラやスラスタに対して様々な制御信号を与えることにより天候の方向又は潮流の変化に起因して船舶が回転される際に所望の位置を維持するのを助ける制御システムを有することもでき、それにより、スラスタは、力をもって、力が回転する際の係留ラインの張力変化を補償するべく寄与する。同様に、同じ理由で、制御システムに制御信号を与えて、係留ラインの張力を増大又は減少できることが考えられてもよい。
【0006】
(船舶の制御システムの検査に伴う問題)
船舶検査官が船を訪れて船上で制御システムの検査を行なうことができる。船上検査は、センサシステムを切り離し或いは接続するとともに、様々な故障状況でシステムの応答を監視することにより行なわれてもよい。しかしながら、期待されるべき条件で船舶の現実的な検査を全体的に行なうためには、期待されるが滅多に生じることがない天候状況及び海況を待ち或いは求めることが必要であり、若しくは、特定の異常が生じた場合に期待できるがそのような状況が偶然に或いは刺激によって生じた場合には危険となり得るような状況を待ち或いは引き起こすことが必要である。制御システムがエラーの正確な補償のための制御信号を与えるかどうかをチェックするため、バラスト分布の異常に大きいエラーなどの極端な状況に船舶を晒すことは選択肢として殆ど考慮されない。そのような種類の検査は一般に行なわれない。
【0007】
船上の制御システムへのセンサデータのシミュレーションを行なうとともに、制御システムがプロペラ、方向舵、スラスタなどのアクチュエータに対して与える制御信号がどれであるかを監視することは可能であるが、これには、検査システムに対する制御システムの局所的な相互接続が必要である。しかしながら、そのような検査は、本出願人の知識によれば、この出願を提出するときに公知ではない。そのような相互接続及び検査は船上で行なうことができるが、検査される船舶を訪れるという欠点は、しばしば、船舶検査官の長い移動を伴い、船舶検査官は、測定のために制御システム入力に対して相互接続される機器と、船舶のアクチュエータに対して一般に送られる制御信号の形態を成す応答のための制御システム出力に対して相互接続される機器とを持って行かなければならず、また、少なくとも検査される実際の船舶の構造を含んでいなければならないデータライブラリを持って行かなければならない。また、検査されて認証される1つの船舶から次の船舶までの移動時間により、検査官は、十分に高い比率で検査を行なうことが難しくなる可能性があり、そのため、検査が行なわれて適切に認証されなければ船舶を使用できない場合には、次の船は待たなくてはならず、待つことにより経済的な不利益が生じる。また、制御システムの検査の欠如により想定され得るエラーが明らかにされない船舶を使用すると、隠れた物理的危険を引き起こす場合がある。
【0008】
以上の結果から、ある時間の後に或いは船舶の任意の必須部品の変更後に制御システムが再検査又は再認可されるべきか否かを表示するために、制御システムが認証時と同じ応答を有することを検証するための方法が必要である。
【0009】
制御システムの工場製造においては、制御システム(ハードウェア及びソフトウェアを含む)のいわゆる工場承認検査(FAT)を行なうことが一般的である。この場合、製造メーカは、シミュレートセンサデータを制御システムに供給するとともに、制御システムがシミュレータデータに対する応答としてどの制御信号を与えるのかを監視する。この種のFATは、製造メーカが存在すると予見したソースからの測定値のエラーしか明らかにすることができない。また、この場合、制御信号は、製造メーカが予見した機器にのみ関連付けられる。従って、制御システムの製造メーカが予見しなかった機器、構成、又は、状況と制御システムがどのように相互作用するのかは確かに分からない。また、FATにおいて、制御システムは、制御システムが船上での使用のために設置されて接続される接続場所で検査されない。
【0010】
(動的位置決めにおける実用的問題の例)
プロペラ、方向舵、又は、トンネルタイプ或いはアジマスタイプのスラスタの所望位置に保持される船舶(4)の動的な位置決めにおいては、船舶が所望の位置から非常に小さい半径内で、例えば2mの半径内でその位置を維持することが動作に不可欠となる場合がある。幾つかの事象が望ましくない場合がある。船舶は、1つ又はそれ以上のプロペラ又は方向舵に関してモータ出力の損失に直面する場合があり、また、残りのプロペラ及び/又はスラスタにおけるモータ出力を増大しなければならず、また、おそらく、未だ機能する残りの方向舵又はスラスタを回転しなければならない。また、制御システムが関連するセンサからの信号の一部を失い、それにより、望ましくない出来事が生じ得るような重大な異常状況に直面する場合もある。本発明者らは、船舶、実際のケースでは掘削プラットフォームが外洋の所定の位置に配置されなければならず且つ海底に油井を形成するために掘削していた事例についての知識を持っている。掘削プラットフォームは、いわゆる動的位置決めすなわち「DP」によって望ましい所定の位置を維持しなければならなかった。つまり、制御システムは、海底に延びる係留ラインを使用することなく、位置測定及びモータ出力によって船舶を所望の位置に維持するようになっていた。掘削プラットフォームには、多数の航海衛星から受けられる無線信号に基づいて船舶の地理的位置を計算する2組のDGPS受信器が設けられていた。また、掘削プラットフォームには、海底の固定された点にあるトランスポンダに対する船舶の位置を測定する2組の水通音響位置センサが設けられていた。掘削中の所定の時間に、油井頭に対するライサ接続部を有し且つ掘削穴に対するドリルストリング接続部を有する船舶が積極的に掘削を行ない、DGPS受信器が約75mの突然の位置変化を示すように事象が行なわれたが、そのような位置変化は実際には生じなかった。そのようなエラーは「ステップ変化」エラーと名付けられてもよい。水中音響センサは、掘削穴にわたって所望の位置で安定位置を表示し続けた。制御システムは、プロペラ及び方向舵を制御し続け、それにより、掘削プラットフォームは、引き続いて、水中音響センサ測定信号に基づき、正確な動的位置で保持された。しかしながら、5分後に、掘削プラットフォームが突然にその時の間違ったDGPS信号に従って所望位置の方へ進み始めることが分かった。ライザを外し、ドリルストリングを切断することを含む関連する緊急処理を行なうことにより、掘削を中断することが必要になった。そのような状況は、ガス及び油が噴出する危険、又は、掘削流体の流出による汚染を伴う場合がある。また、そのような状況は、船舶及び乗組員に危険を与える場合もある。DP掘削の中断後に引き続いて掘削を再開することは非常に費用がかかる場合がある。出願人は、DGPS受信器によって計算された位置の最初の突然の変化が、GPS衛星から受信器への信号送信の乱れによって或いは利用可能な衛星の数が不十分であるという状況によって引き起こされたかもしれないと考えている。実際のものであると見なされるべき前の5分間にわたってそのような計算された位置が安定していなければならないことを必要とする制御システムのソフトウェアの品質状態に起因して、DGPS信号の損失が制御システムによって無視された場合がある。このように、制御システムの設計者は、誤った信号に起因する位置の望ましくない突然の変化を避けることを考えてきたかもしれない。しかしながら、DGPS受信器によって計算された、新しく変更されてはいるが安定した偽りの位置は、5分後に、安定であると見なされた可能性がある、そのため、制御システムの論理プログラムに従って信頼できると見なされ、水中音響トランスポンダによって供給される測定値よりも高い優先度が与えられた可能性がある。これは、掘削が進行中であるという事実にかかわらず、また、位置が不変に保たれなければならないことを水中音響学的に測定された位置が示しているという事実にもかかわらず、制御システムが明らかに所望の位置として判断した新たな位置へ掘削プラットフォームを制御しようとする理由を説明することができる。
【0011】
(船舶の構造変化に関与する問題)
制御システムの再プログラミング
制御システムが船舶で使用するために設置された後にあっては、多くの場合、制御システムのソフトウェアを再プログラミング又は変更する必要がある。これを行なう目的は、プログラムのアルゴリズムにおけるセンサ信号の許容できる変動又は警報限度に関連する数値を変える必要性かもしれず、或いは、制御システムに新たな検査及び機能を導入する必要性である可能性もある。ソフトウェアの再プログラミング又は変更が完了すると、変化が意図する効果(影響)を与えたかどうかを確かめるために、また、変化の結果として新たな意図しないエラーが出現したかどうかを詳しく調べるために、制御システムを検査する必要がある。現在、そのような変化後において船舶の制御システムを検査するための満足な検査機器及び手続は利用できない。
【0012】
(例えばクレーン交換時における既存の制御システムの変更)
油及びガスの探索及び製造に関連する海洋作業は、海底のモジュールに設置及び介入するためのクレーンを有する船舶によって行なわれる。この種のクレーンは、船舶の垂直動作を補償する制御システムを有する。安全−危険状況でのクレーンの動作モード及び機能は、可成りの程度まで、クレーン毎に変わる制御システムのソフトウェアの詳細な設計に依存している。そのようなクレームの機械的構造を検査するための手続きが確立されてきた。これとは異なり、クレーン制御システムのソフトウェアを検査するための確立されたシステム又は方法は存在していない。その理由は、クレーンの応答が、クレーンの機械的構造及び制御システムに加えて、海況及び船舶の動きに依存しているからである。従って、船舶上のクレーンシステムの必要とされる詳細な検査は、船舶の関連する制御システムを含む船舶の動力学、並びに、クレーンの制御システムを含むクレーンの動力学の両方を伴っていなければならない。
【0013】
(制御システムのためのセンサの修理/交換)
制御システムのためのセンサが交換され或いは変更される場合には、警告限度を調整する必要があり、センサ信号における許容可能な変動における限度が必要となる。通常、制御システムは余分なセンサシステムを有し、そのため、同じ物理量を測定するために幾つかのセンサを使用することができる。この一例として、慣性センサ、2つ以上のGPS受信器、2つの水中音響センサシステムによって船舶の位置を測定することができる。これらの測定データから、制御システムにおけるアルゴリズムにより、船舶の位置が決定される。このアルゴリズムは、急激な位置変動下での精度に対する長期安定性などといった精度及び特性に関し、様々なセンサの特性に依存している。センサの交換又は変更は、結果として得られるセンサの新たな組み合わせが制御システムにおいて使用される許容できる位置測定値を与えるかどうかを詳しく調べるために、全てのセンサシステムの検査の必要性を導入する。
【0014】
(アクチュエータの修理/変更/交換)
アクチュエータの交換又は変更後、制御システムは、船舶のための著しく異なる応答を与えてもよい。この理由は、新たな或いは変更されたアクチュエータが、制御システムの開発中に想定されたものとは異なる制御作用を船舶に対して与える場合があるからである。この一例は、動的位置決めのためのスラスタの使用である。この場合、スラスタのシャフト速度と推進力との間の関係は、制御システムが調整されるときに分かっていなければならない。スラスタが変更される場合には、スラスタのシャフト速度と推進力との間の関係は変更されなくてもよいが、システムが仕様に従って実行するかどうかを詳しく調べるために、制御システムを用いて船舶を検査する必要がある。
従って、船舶がその前の構造から変更された場合にも、船舶の制御システムのより効果的な検査が必要であり、また、船舶の古い部品と新しい部品とが以前に組み合わされていなかった場合には、新たな組み合わせで検査しなければならない。
【0015】
(当分野における公知技術)
米国特許第6298318号の「ガイダンスナビゲーション及び制御システムの検査のためのリアルタイムIMU信号エミュレーション方法」は、いわゆる6自由度(6DOF)フライトシミュレータを使用して動きをエミュレート(模倣)することにより航空機を検査するためのエミュレーション方法について記載している。この場合、いわゆる慣性航法モジュールから航空機上の「ガイダンス、ナビゲーション、制御」システムへの信号はシミュレーションによって生成される。この米国特許は、掘削作業中又は何らかの他の形態の定常的作業中の船舶の動的位置決めに関連する問題について論じていないとともに、クレーンの使用、関連する水中機器のナビゲーション、水中音響位置決め機器の組み込み、バラスティングに関連する問題について言及しておらず、また、海洋の波を考慮していない。船は、一般に6DOFを有していないが、その代わり、それが水上艦艇の所要特性である縦揺れ/ロール/ピッチ動作の自己修復作用を有するため3DOFを有する。
【0016】
米国特許第5023791号の「航空機フライト制御のための自動検査装置」は、複数のフライト制御システムを検査するための統合システムの一部としての、航空機のフライト制御システムの検査のための自動検査装置について記載している。自動検査装置は、自動検査装置の動作を制御するプログラム命令を記憶し且つ結果として得られるフライト制御システム検査データを記憶するためのメモリを有するシステムコントローラを有する。自動検査装置は、プログラム命令及び他の情報を自動検査装置に入力し且つシステムコントローラから検査データを出力するためのキーボード、タッチスクリーン、テープドライブを有する。自動検査装置に含まれ且つシステムコントローラによって制御される機器は、航空機のフライト制御システムに入力される検査信号を生成するとともに、結果としてフライト制御システムによって形成される検査データ信号を監視する。自動検査装置は、インタフェースケーブルにより、航空機に含まれる搭載中央メンテナンスコンピュータに対して接続されている。中央メンテナンスコンピュータは、フライト制御システムの機内検査を実行するようにプログラムされ且つ機内検査を実行するためにプログラム命令に従って検査中にシステムコントローラにより制御される不揮発性メモリを有する。
【0017】
米国特許第5541863号の「航空電子工学における仮想統合ソフトウェアテストベッド」は、プロセスと同時に実行し且つ中央プロセスによって同期化されるコンピュータプログラムの選択によりホストコンピュータで航空電子工学ソフトウェアを開発できる航空電子工学における仮想統合ソフトウェアテストベッドについて記載している。開示されたソフトウェアテストベッドは、別個の同期プロセスを使用するとともに、ホストコンピュータで実行するシミュレーションにより或いは実際の機器により航空電子工学装置からの信号を生成することができ、また、実際の航空電子工学ハードウェアから来るデータバス信号及び実際の航空電子工学ハードウェアへと行くデータバス信号は、ホストコンピュータ内のそれらの仮想バスの対応部分にリアルタイム方式で接続されている。
【0018】
米国特許第5260874号の「航空機フライトエミュレーション検査システム」は、フライト時に航空機によって受けられる刺激をエミュレートする刺激を生成する航空機検査システムについて記載している。航空機検査システムは、フライト時に航空機によって受けられる刺激を生成するための多数のプロセッサ制御可能機器を形成するための多数の機器を有する。また、システムは、航空機が晒される刺激に対する様々な航空機部品の応答を監視する多数の機器も有する。プロセッサは、航空機部品からの出力信号に応じて、航空機が空中を飛んでいるときに航空機によって受けられる刺激をエミュレートする刺激を生成するように刺激生成機器に命じる。従って、システムは、フライト時に航空機が晒される刺激に類似する刺激の最初の組(セット)を生成するとともに、航空機が晒される刺激に対する航空機の応答を監視し、それに応じて、航空機に対する刺激の更新された組を生成する。また、システムは航空機部品の出力応答の応答を記録し、それにより、航空機が適切に機能することを保障するように委ねられた作業者によって出力応答を監視することができる。また、システムは、フライトエミュレーション中に航空機を「ループ状に」配置するために使用できるため、航空機搭乗員を養成するために使用することもできる。
【0019】
米国特許6505574号の「クレーンの負荷における垂直動作補償」は、クレーンオペレータからの命令及び測定値に基づいてクレーンを制御する中央プロセッサに測定値を供給するエンコーダ、ブーム角度センサ、回転角度センサ、モーションセンサを使用して、海況によって引き起こされる船舶クレーンの負荷の垂直動作を減少させるための方法及びシステムについて記載している。
【発明の開示】
【発明が解決しようとする課題】
【0020】
(問題の解決策、本発明の短い概要)
前述した問題の一部に対する解決策は、船舶の制御システムを検証するための方法であって、上記制御システムは、その動作状態において、センサからのセンサ信号及び1つ又はそれ以上のコマンド入力装置からのコマンド信号を受信するようになっており、上記制御システムは、上記測定値及びコマンド信号に対する応答として、制御信号を上記船舶のアクチュエータに対して供給することにより、上記船舶の所望の位置、速度、進路又は他の状態変数を維持する方法において、以下の新規なステップ、すなわち、
第1の時間(t0)中に、上記制御システムに対する1つ又はそれ以上の実際のセンサ信号(実センサ信号)の受信を切り離して、上記実際のセンサ信号のうちの上記1つ又はそれ以上を、検査信号源から上記制御システムへの1つ又はそれ以上の人工の測定値を含む第1の検査シーケンス(T0)と置き換えるステップと、
上記実際の及び/又は人工のセンサ信号に基づいて上記制御システムを機能させて、上記第1の時間(t0)における上記第1の検査シーケンス(T0)に対する応答(S0)として上記制御システム(2)の制御信号として制御信号ロガー(42)に記録される制御信号を生成するステップと、
上記第1の時間(t0)における上記第1の検査シーケンス(T0)に対する上記制御システム(2)の応答(S0)を上記制御システム(2)の「署名」応答(S0)として記憶するステップと、
を含み、
その後の時間(t1、t2、t3、……)において、上記制御システム(2)に対して入力される同じ所定の検査シーケンス(T0)を使用して、上記制御システム(2)からのその後の応答(S1、S2、S3、……)を記録するとともに、上記その後の応答(S1、S2、S3、……)が上記署名応答(S0)にほぼ類似しているかどうかを決定して、上記制御システム(2)が変更されていないことを検証し、或いは、上記その後の応答(S1、S2、S3、……)が上記署名応答(S0)と大きく異なるかどうかを決定して、上記制御システム(2)が変更されたことを示すという目的をもっている方法である。
【0021】
本発明の方法の更なるステップは独立請求項において見出される。
【発明を実施するための最良の形態】
【0022】
本発明が図1〜図10の添付図面に示されている。図面は、本発明を例証するように意図されており、本発明を限定するように解釈されるべきではない。本発明は添付の特許請求項によってのみ限定される。
【0023】
1.1 船舶及び制御システムの一般的な説明
ここで、添付図面に示される本発明の幾つかの実施形態を参照して本発明について説明する。本発明は、図4aの概略図に示されるように、また、図4b及び図4cに詳細に示されるように、船、ドリリングプラットフォーム(掘削基地)、石油生成プラットフォーム等の船舶(4)における制御システム(2)を通信チャンネル(6)を介してリアルタイムで検査するためのシステム及び方法を含む。制御システム(2)は、船舶(4)の制御及び監視を含み得る。制御システム(2)の検査は、船舶(4)における正常な状態及び異常な状態のシミュレーション、そのような正常及び異常な状態の通常の変化、例えばシミュレートされた穏やかな海の状態(H1)の通常の動きのシミュレーションを含み得る。また、シミュレートされた異常な海の状態(H2)における通常の動きや、例えば船舶が1つのプロペラ(16)しか有していない場合においてその1つのプロペラ(16)のモータ出力の損失を伴う故障状態をシミュレートしてもよく、また、その結果として生じる所望の進路(7b)から離れるような回転及び所望の位置(7a)から逸れるような漂流状態の動的なシミュレーションを行なってもよい。また、船舶(4)が未だ機能している1つ又はそれ以上のプロペラ(16b、16c、……)を有する場合において1つ又はそれ以上のプロペラ(16a、16b、……)の出力の損失を伴う状態をシミュレートしてもよく、また、1つ又はそれ以上のプロペラの出力損失に対して船舶がどのように反応するかを調べてもよい。
【0024】
以下、船上での局所的な介入又は遠隔検査室(40)から1つ又はそれ以上の船舶(4a、4b、4c……)の制御システム(2)への介入のための図4a1、4b、4cに示されるシステムについて簡単に説明する。
【0025】
本発明に係るシステムは、船舶(4)における制御システム(2)の検査のために設けられており、制御システム(2)は、船舶(4)を制御して監視する。システムは、以下の特徴を備えている。
* 船舶(4)上に設置された1つ又はそれ以上のセンサ(8)は、1つ又はそれ以上のセンサ信号(7)を信号ライン(12)を介して制御システム(2)へ送る。
* 船舶(4)上のコマンド入力装置(10)は、所望の位置、進路、速度(9)等をコマンド信号ライン(11)を介して制御システム(2)に送る。
* 制御システム(2)中のアルゴリズム(31)は、センサ信号(7)及び/又はコマンド信号(9)に基づいて船舶アクチュエータ(3)への制御信号(13)を計算するため、また、制御信号(13)を信号ラインを介してアクチュエータ(3)へ送るために設けられている。
* 1つ又はそれ以上の通信ライン(6)は、1つ又はそれ以上のシミュレートセンサ信号(7’)及び/又はシミュレートコマンド信号(9’)を遠隔検査室(40)から制御システム(2)へ送るようになっていてもよい。遠隔検査室は陸上にあってもよく、また、リアルタイム通信のための機器を検査室内及び検査される各船舶上の両方で利用できなければならない。本発明の他の実施形態において、シミュレートセンサ信号(7’)及び/又はシミュレートコマンド信号(9’)は、局所的に接続された装置から送られてもよい。
* 遠隔検査室は、船舶(4)における前の状態(50’)、制御信号(13、13’)、動的パラメータ(5)に基づいて船舶モデル(4’)の新たなセンサ信号(7’)に対応する新たな動的状態(50’)をシミュレートするためのアルゴリズム(32)を含むシミュレータ(30R)を有していてもよい。また、同様のシミュレータが局所的に設けられてもよく、従って、このシミュレータをローカルシミュレータ(30L)と呼んでもよい。上記ローカルシミュレータ(30L)は、遠隔検査中に生じる時間遅延に起因する同期エラーを補償するため、上記船舶(4)の上記制御システム(2)に接続されている。そのようなローカルシミュレータについては図9及び図10を用いて説明することにする。本発明の1つの実施形態、いわゆる「署名」方法の実施形態においては、制御システムからの署名の取得が船舶シミュレーションの形態を成すフィードバックを必要としない場合があるため、ローカルシミュレータが不要になる場合さえある。
* 通信ライン(6)は、センサ信号(7’)の形態を成す船舶モデル(4’)の新たなシミュレート状態を制御システム(2)へ送り戻すため、また、制御信号(13)の実際の実センサデータ及び/又はシミュレートセンサデータ(7、7’)又は実際の実コマンド信号及び/又はシミュレートコマンド信号(9、9’)に基づいて制御システム(2)で連続的に計算して、所望の位置、進路、速度等の形態を成す実コマンド信号及び/又はシミュレートコマンド信号(9、9’)のうちの少なくとも1つを得るために設けられてもよい。
* 通信ライン(6)は、制御信号(13)の形態を成す制御システム(2)の応答を制御信号(13’)として遠隔検査室(40)へ送るために設けられてもよいが、結果として得られる制御信号(13’)を船上のローカルシミュレータへ送ってもよい。
【0026】
制御信号(13)は、1つ又はそれ以上のプロペラ(16)又はスラスタ(17)におけるシャフト速度(13a、13b)や、方向舵(18)又はスラスタ(17)及び可能であればバラストポンプやクレーン等の他のアクチュエータにおける回転角度(13c)の形態を成す信号(13a、13b、13c)を含む。
【0027】
センサ(8)は、多数の異なる装置から選択される1つ又はそれ以上の装置を備えていてもよい。上記多数の異なる装置のうちの幾つかを以下に示す。
− 船舶位置(7a)を決定するためのGPS受信器(8a)、水中音響位置センサ(8h)、積算加速度センサなどの位置測定装置(8a)
− 船舶進路(7b)を決定するための進路測定装置(8b)、例えばジャイロコンパス又は幾つかの他のコンパス
− 速度(7c)を決定するための速度センサ(8c)又は単一積算加速度センサ
− (相対)風速(7d)及び風向(7e)を表示するための風速計(8d、8e)
− ロール角度(7f)を表示するためのロール角度センサ(8f)
− ピッチ角度(7g)を表示するためのピッチ角度センサ(8g)
【0028】
本発明の好ましい実施形態において、システムには、1つ又はそれ以上のセンサ信号(7)を制御システム(2)への信号ライン(12)から切り離すスイッチ(15a)が設けられている。また、本発明に係るシステムには、1つ又はそれ以上のコマンド信号(10)を制御システム(2)への信号ライン(11)から切り離す第2のスイッチ(15b)を設けることができるとともに、1つ又はそれ以上の制御信号(13)を制御システムからの信号ライン(14)から切り離す第3のスイッチ(15c)を設けることもできる。このようにすれば、スイッチ(15)を使用して、船舶の残りの部分への信号及び残りの部分からの信号から制御システム(2)を完全に或いは部分的に分離させることができる。勿論、制御システム(2)は、船上の電源装置に接続されたままでなければならない。
【0029】
システムの通常の状態では、アクチュエータ(3)への制御信号(13)を計算するため、船舶の動的パラメータ(5)は、制御システム(2)のアルゴリズム(31)内に入ることができる。
【0030】
システムは、制御システム(2)からの制御信号(13、13’)及び完全に或いは部分的にシミュレート測定値(7、7’)によって表わされる初期状態に基づいて船舶の状態をシミュレートするアルゴリズム(32)を有するシミュレータ(30R)が遠隔検査室(40)に設けられるように構成されていてもよいが、通信遅延問題を回避するために同等のシミュレータ(30L)が船上に局所的に配置されていてもよい。
【0031】
通信ライン(6)は、1つ又はそれ以上のシミュレートセンサ信号(7’)を遠隔検査室(40)から送信するようになっていてもよく、また、遠隔検査室(40)側の第1のリアルタイムインタフェース(6a)に接続されるとともに、第1のリアルタイムインタフェース(6a)から切断される。同様に、通信ライン(6)は、船舶(4)側の第2のリアルタイムインタフェース(6b)に接続されるとともに、第2のリアルタイムインタフェース(6b)から切断される。第2のリアルタイムインタフェース(6b)は、制御システム(2)への信号ライン(11)に対してスイッチ(15a)により接続される。本発明の好ましい実施形態において、通信インタフェース(6b)は、図9に示され且つ図4cにも示されるように、ローカル船舶シミュレータコンピュータ(30L)により上記スイッチ(15a)に対して接続される。
【0032】
検査システムは、上記遠隔検査室(40)内の遠隔配置されたシミュレータコンピュータ(30R)を使用して、上記シミュレートセンサ信号(7’)及び上記シミュレートコマンド信号(9’)を上記通信ライン(6)を介して上記船舶側の上記ローカルシミュレータ(30L)に対して送信すること、及び、上記ローカルシミュレータコンピュータ(30L)から上記制御信号(13’)を上記通信ライン(6)を介して受信することを含み得る。
【0033】
また、検査システムは、上記遠隔検査室(40)内の遠隔配置された検査マネージャ(33)を使用して、上記シミュレート状態(50’)の初期値と、上記シミュレートコマンド信号(9’)の時間系列と、海の状態、潮流、風速、風向におけるシミュレート値とを上記通信ライン(6)を介して上記船舶側の上記ローカルシミュレータ(30L)に対して送信すること、及び、上記ローカルシミュレータコンピュータ(30L)から上記制御信号(13’)を上記通信ライン(6)を介して受信することを含み得る。この場合、上記ローカルシミュレータ(30L)が上記制御システム(2)に接続され、これにより、上記制御システムは、上記ローカルシミュレータ(30L)から上記シミュレートセンサ信号(9’)及び上記シミュレートコマンド信号(9’)を取得するとともに、上記制御信号(13’)をローカルシミュレータ(30L)に対して出力する。
【0034】
遠隔検査室(40)からリアルタイムインタフェース(6a)及び通信ライン(6)及びリアルタイムインタフェース(6b)を介して制御システム(2)に対してシミュレートコマンド信号(9’)を送信するために、シミュレートコマンド入力装置(10’)が遠隔的に配置されてもよい。本発明の好ましい実施形態において、シミュレートコマンド入力装置又は検査コマンド入力装置(10’、43)は、シミュレートコマンド信号(9’)を生成して制御システム(2)に対して直接に送信するため、船上に局所的に配置されてもよい。署名応答取得のために使用される本発明の好ましい実施形態において、シミュレートコマンド信号(9’)は、後述するようにシミュレートセンサ信号(7’)及びシミュレートコマンド信号(9’)を含む検査シリーズ(T0)中に組み込まれてもよい。上記人工測定値(7’)又は人工コマンド(9’)を制御システム(2)に対して供給するため、検査される船舶(4)もしくはその近傍にローカル検査信号源(41L)が局所的に配置されてもよい。
【0035】
制御システム(2)からの応答(S0)を所定の人工測定値信号シーケンス(T0)の状態で記録するために制御信号ロガー(42)が使用される。また、この制御信号ロガー(42)は、上記所定のシーケンス(T0)又は言うまでも無く、実際のもの或いは人工のものである他の測定値シーケンス(T1、T2、T3、……)に対するその後の応答(S1、S2、S3、……)を記録するために使用されてもよい。上記制御システム署名応答(S0)を規定するために使用される検査シーケンス(T0)を記憶するため、及び/又は、その後の検査シーケンス(T1、T2、T3、……)を記憶するために、メモリ(44)が検査信号源(41R/41L)に対して接続されてもよい。
【0036】
システムは、制御システム(2)内のアルゴリズム(31)の全て又は一部を、遠隔検査室(40)から局所的に或いは通信ライン(6)を介して変更でき、較正でき、或いは置き換えることができるようになっていてもよい。本発明において、船及び/又は検査室は、測定値(7、7’)に対する制御システム(2)からの応答(13’、19’)を記録するためのデータロガー(15)を有する。
【0037】
1.2 制御システムの検査方法の説明
前述したシステムは、船舶(4)内の制御システム(2)の検査方法で使用され得る。制御システム(2)は、1つ又はそれ以上のアクチュエータ(3)に対する制御信号(13)を用いた船舶(4)の制御及び監視を含む。
【0038】
制御システムを検査するための方法は、以下のステップを含み得る:
− 制御システム(2)への第1のセンサ信号ライン(12)を介して1つ又はそれ以上のセンサ(8)から制御システム(2)へとセンサ信号(7)をリアルタイムで取得する。
− 制御システム(2)への第2の信号ラインすなわちコマンド信号ライン(11)を介してコマンド入力装置(10)から制御システム(2)へとコマンド信号(9)を取得する。
− 1つ又はそれ以上の取得されたセンサ信号(7)及びコマンド信号(9)並びに可能であれば船舶の動的パラメータ(5)に基づいて制御システム(2)内の制御アルゴリズム(31)で計算するとともに、制御信号(13)を第3の信号ライン(14)を介してアクチュエータ(3)へ送信する。
− 1つ又はそれ以上のセンサ(8)からの1つ又はそれ以上のセンサ信号(7)を切り離し、或いは、コマンド入力装置(10)からのコマンド信号(9)を切り離すことにより、選択されたセンサ信号(7)又はコマンド入力(9)が制御システム(2)に到達しないようにすると同時に、1つ又はそれ以上の切り離されたセンサ信号(7)又はコマンド信号(9)を、遠隔検査室(40)側で船舶(4)に関して生成された対応するシミュレートセンサ信号(7’)又はコマンド信号(9’)と交換する。シミュレート信号(7’、9’)は、通信ライン(6)を介して、1つ又はそれ以上の信号ライン(12、14)により、遠隔検査室から制御システム(2)へと送られる。
− 制御信号(13、13’)の計算は、制御システム(2)において、実際のセンサ信号及び/又はシミュレートセンサ信号(7a又は7a’、7b又は7b’、7c又は7c’、……)或いはコマンド信号(9a又は9a’、9b又は9b’、9c又は9c’、……)に基づき通常の方法で継続する。
− その後、制御システムによって生成される制御信号(13’)を通信ライン(6)を介して遠隔検査室(40)へ送信することができる。
【0039】
方法の好ましい実施形態において、方法は、その後、検査室(40)内の遠隔シミュレータ(30R)又はローカルシミュレータ(30L)において、制御信号(13’)に基づき船舶モデル(4’)の新たな動的状態をアルゴリズム(32)によってシミュレートすることを含む。このようにすると、船舶が世界中のどこに配置されているかに関係なく、船舶における遠隔検査室(40)から制御システム(2)に関する検査を行なうことができる。船又はその近傍でシミュレーションが局所的に生じない場合には、シミュレーションアルゴリズムは、通信ライン(6)の使用によって引き起こされる時間遅延を考慮しなければならない。時間遅延エラーを避けるため、遠隔コンピュータ(30R)は、図9に示されるように、シミュレーションのために使用されるデータ(7’、9’)を通信ライン(6)を介して船舶のローカルシミュレーションコンピュータ(30L)へ送信してもよい。遠隔コンピュータ(30R)は、実際のセンサ信号及びコマンド信号(7、9)の切り離しを開始し、これらの信号を人工のセンサ信号及びコマンド信号(7’、9’)と交換して制御システム(2)へ送るようにローカルコンピュータ(30L)に対して命令し、また同様に、実際の出力制御信号(13)を検査出力(13’)と共に切り離してこれらを局所的に記憶し、前述したように船舶モデル(4’)の動的な動きをシミュレートするためのシミュレーションアルゴリズム(32)の検査出力(13’)オンラインを使用するとともに、検査出力(13’)を遠隔検査室(40)の遠隔配置されたコンピュータ(30R)へ送り戻すようにローカルコンピュータ(30L)に対して命令する。検査出力(13’)は、オンライン態様で遠隔検査室へ送信される必要はなく、検査が行なわれている最中又は検査後に1つ又はそれ以上のバッチ状態で遠隔検査室に戻されてもよい。その後、検査出力(13’)は、遠隔検査室(40)において記録されて解析されてもよい。
【0040】
前述した方法においては、制御システムの検査に関与する遠隔検査室(40)を陸上に配置することができ、また、検査される船舶(4a、4b、4c、……)は、検査室から遠く離れた距離、一般的には1〜20000kmの距離に配置される。この場合、検査される船舶(4a、4b、4c、……)は、近くの港、遠く離れ港、ドック又は構内に停泊して位置され或いは外洋に位置されてもよい。
【0041】
制御システムの検査が完了すると、船舶と遠隔検査室との間の通信が切断され、船舶における制御システムの通常の動作のため、制御システムに対する通常のセンサ信号及び通常のコマンド信号が再接続されるとともに、制御システムからの制御信号がアクチュエータに対して再接続される。
【0042】
本発明の好ましい実施形態において、センサ信号(7)は、センサ(8)からの以下の1つ又はそれ以上のセンサパラメータを含む:
− GPS受信器(8a)、水中音響位置センサ(8h)、積算加速度センサなどの位置センサ(8a)からの船舶位置(7a)
− 進路センサ(8b)、例えばジャイロコンパス又は他のコンパスからの進路(7b)
− 速度センサ(8c)又は単一積算加速度センサからの速度(7c)
− 風速計(8d、8e)からの風速(7d)及び風向(7e)
− ロールセンサ(8f)からのロール角度センサ(7f)
− ピッチセンサ(8g)からのピッチ角度センサ(7g)
【0043】
本発明の好ましい実施形態においては、1つ又はそれ以上の所望の位置(9a)、進路(9b)、速度(9c)を得るため、制御信号(13)は、1つ又はそれ以上のプロペラ(16)又はスラスタ(17)のシャフト速度や、方向舵(13c)又はスラスタ(17)及び可能であれば他の制御装置における角度の形態を成す信号(13a、13b、13c)を含む。
【0044】
方法は、1つ又はそれ以上のプロペラ(16a、16b、16c、……)への制御信号を計算するために使用することができ、また、制御装置(18)は、1つ又はそれ以上の方向舵(18a、18b、18c)を含んでいてもよく、1つ又はそれ以上のスラスタ(17)を含み得る。
【0045】
コマンド入力装置(10)は、1つ又はそれ以上の以下のアイテム、すなわち、位置指定装置(10a)、ステアリングホイール(10b)、速度指定装置(10c)、或いは、所望の傾き角度、ピッチ角度、縦揺れ補償などを指定するための装置(10x)を含み、これらの装置は、所望の位置(9a)、所望の進路(9b)、所望の速度(9c)又は他の所望の状態(9x)、例えば所望のロール角度、所望のピッチ角度、所望の縦揺れ補償等のうちの1つ又はそれ以上のコマンド信号(9)を与える。
【0046】
本発明の好ましい実施形態において、方法は、検査におけるシミュレートセンサ信号(7’)及び残っていればその残りの実際のセンサ信号(7)、シミュレートコマンド信号(9’)及び残っていればその残りの実コマンド信号(9)に基づいて制御システム(2)が許容できる応答(S)をもたらす制御信号(13、13’)を与え、それにより、検査に基づいて制御システム(2)が認証されることを検証するために遠隔検査室(40)が使用されることを含み得る。
【0047】
船舶の動的パラメータ(5)としては、後述するように、質量(m)、軸方向慣性モーメント、船舶の質量分布、船体の幾何学的形状を表わす船体パラメータを挙げることができる。センサ(8)からのセンサ信号(7)の制御システム(2)に対する切り離しは、信号ライン(12)上のスイッチ(15a)によって行なうことができる。コマンド入力装置(10)からのコマンド信号(9)の制御システム(2)に対する切り離しは、信号ライン(11)上のスイッチ(15b)によって行なうことができる。
【0048】
故障状況は、その時点で1つ又はそれ以上の選択されたセンサ信号(7)又はコマンド信号(9)を切り離して部品の故障をシミュレートすることにより検査することができ、また、この場合、制御信号(13、13’)及び状態信号(19、19’)の形態を成す制御システム(2)の応答は、局所的に或いは検査室(40)においてロガー(15)に記録される。しかしながら、そのような検査は、煩雑であるとともに、その後の検証機会において繰り返すことが困難である。
【0049】
また、故障状況は、測定値を変えることにより、或いは、選択されたセンサ信号(7’)に乱れを形成することにより、或いは、測定値(7’)に対して天候、風、電気的ノイズ、大気雑音又は音響雑音のような外的な乱れを形成することにより検査することもできる。そのような乱れは、遠隔検査室(40)から船舶(4)の制御システム(2)へと送られてもよく、また、この場合、制御信号(13、13’)及び状態信号(19、19’)の形態を成す制御システム(2)の応答は、検査室(40)内のロガー(15)に記録される。
【0050】
本発明に係る方法の好ましい実施形態においては、船舶(4)の制御システム(2)のための新たなソフトウェアを検査室(40)から通信ライン(6)を介して送信することができる。
【0051】
制御システム(2)の検査及び検査結果に基づいて検査室(40)が制御システム(2)を認可できる本発明に係る方法の実行後、検査室(40)は、船舶(4)の通常の動作における使用に関して制御システム(2)を認証することができる。
【0052】
本発明に係る提案された遠隔検査の利点の1つは、シミュレートされた不具合状況下及びシミュレートされた広大な範囲の天候負荷下におけるソフトウェア及び制御システム(2)の全体の検査の自由度(柔軟性)が、従来の検査及び認証下における場合よりも非常に高いという点である。同時に、以前に使用された船舶制御システムの検査方法の欠点及び限界、すなわち、航行距離、時間がかかる航行、高コストな航行、検査のために機器を準備する時間などの欠点及び限界が回避される。提案された発明を用いると、少数のオペレータにより以前よりもかなり多くの船舶を検査して認証することができる。また、自動的な検査の実行により検査の再現性が高まるため、検査の質が向上する。
【0053】
1.3 掘削船舶における制御システムの検査の実施例
本発明は、前述した制御システムが実際に安全で且つ確実な方法で機能するかどうかを検査するために使用することができる。これについては、以下の実施例を想像してもよい。すなわち、図7に示されるように、掘削船(4)内の制御システム(2)を検査することが望ましい。動的に位置されるシミュレート掘削を用いた検査下にある位置の誤りが否定的結果を有さないように、掘削は検査前に終了される。掘削船(4)は、図4a、図4b、図4cに示されるものに対応し且つ図示のように同じ方法でリアルタイムインタフェース(6b)と通信ライン(6)とリアルタイムインタフェース(6a)とを介して遠隔検査室(4)に接続される制御システム(2)を有する。制御システム(2)は、プロペラ(16a、16b、16c、……)又はスラスタ(17)のような推進装置(16)及び方向舵(18)、トンネルスラスタ及びアジマススラスタの形態を成すスラスタ(17)のような制御装置(18)を有する掘削船(4)の制御及び監視を含む。スラスタ(17)は、推進装置(16)及び制御装置(18)の両方の機能を果たすことができる。シミュレート掘削下では、掘削船(4)は、想定される位置のずれが最も小さい固定位置(9a)にあり、また、風、波、潮流に対するその影響という形で天候を補償するにすぎない進路(7b)及び速度(7c)を伴っていることが望ましい。公知の方法と一致する動的位置決め方法は、連続的に実行できる以下のステップを含み得る:
* 制御システム(2)は、1つ又はそれ以上のセンサパラメータからセンサデータ(7)をリアルタイムで取得する。例えば、測定された船舶の位置(7a)をDGPS受信器等の位置センサ(8a)から取得し、進路(7b)をジャイロコンパス等のような進路センサ(8b)から取得する。
* 制御システム(2)は、図7に示される1つ又はそれ以上の所望の位置(9a)、方向舵又はスラスタにおける角度の形態を成す所望の進路(9b)、プロペラ(16)及びスラスタ(17)におけるシャフト速度の形態を成す所望の速度(9c)のためのコマンド信号を与える少なくとも1つの位置指定装置(10a)、ホイール(10b)、速度指定装置(10c)を含むコマンド入力装置(10)、例えばいわゆるジョイスティックパネルからコマンド信号(9)を取得する。
* センサ(8)は、センサ信号(7)を第1のセンサ信号ライン(12)を介して制御システム(2)へ送信する。
* コマンド入力装置(10)は、コマンド信号(9)を第2の信号ラインすなわちコマンド信号ライン(11)を介して制御システム(2)へ送る。
* その後、制御システム(2)は、取得された1つ又はそれ以上のセンサ信号(7a、7b、7c、……)及びコマンド信号(9a、9b、9c、……)、可能であれば船舶(4)における質量(m)及び軸方向慣性モーメント(M1、M2、……)のような必要とされる動的パラメータの組に基づいて、また、プロペラ(16)における所要シャフト速度(13a)、方向舵(18)及び可能であれば1つ又はそれ以上の所望の位置(9a)、進路(9b)、速度(9c)等を維持し且つ回復させるための他の制御装置における角度(13c)に基づいて、連続的に計算する。
* その後、制御システム(2)は、プロペラ(16)及び/又はスラスタ(17)におけるシャフト速度(13a)及び方向舵(18)及び/又はスラスタ(17)における角度(13c)を制御するために、所要シャフト速度(13b)を含む制御信号(13a、13b、13c、……)を制御システム(2)から第3の信号ライン(14)を介して送る。
* 信号ライン(12)上のスイッチ(15a)により、1つ又はそれ以上のセンサ(8)からの1つ又はそれ以上のセンサ信号(7)が制御システム(2)から切り離され、及び/又は、信号ライン(11)上のスイッチ(15b)により、制御入力装置(10)からの1つ又はそれ以上のコマンド信号(9)が制御システム(2)から切り離される。
* 1つ又はそれ以上の切り離されたセンサ信号(9)、例えば測定された位置(7a)又は進路(7b)、或いは、1つ又はそれ以上の切り離されたコマンド信号(9)、例えば所望の位置(9a)又は所望の進路(9b)は、1つ又はそれ以上の信号ライン(12、14)を形成することにより、対応するシミュレートセンサ信号(7’)、例えばシミュレート測定位置(7a’)又はシミュレート測定進路(7b’)、或いは、対応するシミュレートコマンド信号(9’)、例えばシミュレート所望位置(9a’)又はシミュレート所望進路(9b’)に取って代えられる。ここで、シミュレートセンサ信号及びシミュレートコマンド信号(7、9)は、船舶(4)に関して遠隔検査室(40)で生成されるとともに、通信ライン(6)を介して一方又は両方のスイッチ(15a、15b)により1つ又はそれ以上の信号ライン(12、14)へと送られる。この場合、DGPS受信器(8a)からセンサ信号(7a)を形成してもよく、また、これらの信号を、船舶(4)が実際に存在している位置(9a)から所定距離だけ離れている間違った逸脱した新たな位置と置き換えてもよい。
* その後、制御システム(2)は、入力及び/又はシミュレートセンサ信号(7a又は7a’、7b又は7b’、7c又は7c’、……)及びコマンド信号又はシミュレートコマンド信号(9a又は9a’、9b又は9b’、9c又は9c’、……)並びに所要船舶パラメータ(5)に基づいて、プロペラ(16)における所要シャフト速度(13b)、及び、方向舵(18)並びに所望位置、進路、速度等のうちの少なくとも1つを得るための他の制御装置における角度(13c)を順次に連続して計算する。計算された応答、すなわち、例えばプロペラ(16)の制御のための制御信号(13a)や方向舵(18)の角度(13c)のような、制御システム(2)からアクチュエータ(3)へのいわゆる制御信号(13)は第3のスイッチ(15c)によって切り離し又は隠すことができ、それにより、制御信号(13)は、検査中にプロペラ(16)又は方向舵(18)を制御しないが、その代わり、通信ライン(6)を介して遠隔検査室(40)に送られる。
【0054】
その後、制御システム(2)は、「ブラックボックス」(2)と見なされてもよい。この場合、「ブラックボックス」(2)への少なくとも1つのセンサ信号(7)の変化がシミュレートされるとともに、「ブラックボックス」(2)が制御信号(13)に応答する。はじめに述べた掘削船(4)のケースでは、DGPS信号にエラーが存在した場合には、制御システムが5分間にわたって断固として誤っているとしてきたのに突然に正しいと見なす新たな位置へ船舶を移動させるために、制御システム(2)が船舶(4)のプロペラ、スラスタ及び方向舵を突然に制御しようとする事態が5分後に起こる。
【0055】
1.4 船舶の動き及びこの動きのシミュレーション
船舶(4)の動きは、図5に示されるように、大波の時、揺れている時、船首揺れ(ヨー)している時の船の速度に置き換えて、質量中心の位置によって、また、ロール角、ピッチ角、ヨー角によって表わされる。船舶の動きを独自に表わすこれらの一連の変数(速度、位置、回転角度など)は、船舶の状態(50)であると言われる。船舶は、船舶の動きに影響を与える力やモーメントに晒される。これらの力及びモーメントは、風、潮流、波からの刺激、プロペラ(16)、スラスタ(17)、方向舵(18)のようなアクチュエータ(3)の使用による刺激、ロール角やピッチ角及び縦揺れの位置に起因するバネ力作用に対応する静水力からの刺激、船舶(4)の速度及び加速度に関連する流体力からの刺激によるものである。船舶(4)に作用する力及びモーメントは、状態(50)によって与えられる船舶の動きによって決まる。これに対し、船舶の動きは、船舶に作用する力及びモーメントの結果と見なすことができる。船舶や船の場合、船体の幾何学的形状、質量、質量分布は知られている。また、船の流体力学的パラメータも知られている。船舶の動きが状態(50)に関して与えられると、船に作用する力やモーメントを例えばアルゴリズム(32)の使用によりシミュレータ(30)で計算することができる。シミュレータ(32)において、シミュレート船舶(4’)のシミュレート状態(50’)は、以下に示される手続きで計算される。そして、シミュレート船舶(4’)の加速度及び角加速度は、ニュートンの法則及びオイラーの法則から求められる船舶における運動方程式によって計算されてもよい。そのような運動方程式は教科書に記載されている。運動方程式には以下のパラメータが現れる:
− 船舶の質量
− 質量中心(重心)の位置
− 浮心の位置
− 船舶の慣性モーメント
− 長さ、ビーム、ドラフトを含む船体の幾何学的形状
− 流体力学的付加質量
− 流体力学的な起こり得る減衰
− 粘性減衰
− 縦揺れ、ピッチ、ロール時の動きに起因する船体の復元力及びモーメントに関連するパラメータ
− 波成分の振幅、周波数、方向を、結果として船体に作用する力及びモーメントに関連付けるパラメータ
− 更に、運動方程式は、プロペラ速度及びピッチに応じたプロペラ(16)からのアクチュエータ力、方向舵角度及び船舶速度に応じた方向舵(18)からの力、スラスタ速度及び方向に応じたスラスタ(17)からの力に関する数学的モデルを含む。
【0056】
以下の手続きは、u0〜uNの時間間隔にわたって状態(50、50’)により与えられる船舶(4、4’)の動きを計算するために使用することができる。すなわち、最初の時刻u0において船舶の動きが状態(50’)に関して与えられると仮定すると、この時刻において力及びモーメントが計算される。その結果、船舶(4、4’)における運動方程式から、時間u0における船舶の加速度及び角加速度を計算することができる。その後、数値積分アルゴリズムを使用して、時間u1=u0+hにおいて状態(50、50’)により与えられる船舶の動きを計算することができる。ここで、hは積分アルゴリズムの時間ステップである。船舶において、時間ステップhは一般に0.1〜1sの範囲内にある。時間u1における船舶(4、4’)の動き(50、50’)が計算されると、時間u1における力及びモーメントを計算できるとともに、u1における加速度及び角加速度が運動方程式から求められる。この場合も先と同様に、数値積分を使用して、時間u2=u1+hにおける船舶の動き(50、50’)が計算される。この手続きは、時間uNに達するまで、各時刻uk=u0+h×kにおいて繰り返すことができる。
【0057】
船舶に作用する波は、波成分の和として表わされる。この場合、1つの波成分は、所定の周波数、振幅、方向を有する正弦波の長いクレスト状の波である。海の所定の場所において、波成分の振幅及び周波数の広く行渡った分布は、JONSWAPスペクトル又はITTCスペクトルのような公知の波スペクトルによって与えられる。この場合、波スペクトルの強度は、重大な波高に関してパラメータ化される。結果として船舶に作用する力及びモーメントは、波の振幅、周波数、方向の関数であるとともに、船舶の速度及び進路の関数である。風からの力及びモーメントは、風速、風向、船舶速度、風向に対する船舶の進路の関数としての海面上における船の投影面積によって与えられる。潮流からの力及びモーメントは、潮流速度、潮流方向、海面下における船体の投影面積によって、また、潮流方向に対する船舶の速度及び進路によって与えられる。
【0058】
1−5 動的位置決め−DP:
動的位置決め、いわゆるDPにおいて、船舶(4)は、3つの自由度(DOF)で制御される。x、yの進路における所望の位置は、制御パネル(10)上のキーボード、ローラボール、マウス、又はジョイスティックを使用するオペレータからの入力として与えられる。制御システム(2)は、船舶が所望の位置及び進路を達成するように、縦揺れ方向及び揺れ方向の所要のアクチュエータ力、及び、ヨー軸周りのアクチュエータモーメントを計算するために使用される。また、制御システム(2)は、命令されたアクチュエータ力及びモーメントに対応するプロペラ力、方向舵力、スラスタ力の計算を伴うアクチュエータ割り当ても含む。制御システム(2)は、船舶(4)上のコンピュータのアルゴリズム(31)を実行することにより実施される。このアルゴリズム(31)は、所望の位置(9a)及び進路(9b)と測定された位置及び進路(7a、7b)とを比較し、また、これに基づいて、アルゴリズムは、制御理論を使用し且つ教科書に見られる必要なアクチュエータ力及びモーメントを計算する。また、アルゴリズムは、プロペラ力、方向舵力、スラスタ力が計算される割り当てモジュールを含む。位置及び進路は、DGPSセンサ、ジャイロコンパス、トランスポンダが海底に配置された水中音響センサシステム、海底上に固定された1本のピンと張ったワイヤ(トートワイヤ)の表示が測定される複数のピンと張ったワイヤによって測定される。
【0059】
1−6 船舶の制御システムの検査
例えばDPシステムなどの海洋制御システムの様々な故障は、特定の故障状況を引き起こす状態と共に記録されてきた。この一例として、GPS受信器の75mの突然の安定したエラーは、DP制御下において、掘削船におけるいわゆるドライブオフの形で、重大な故障状況を引き起こしてきた。この場合、船舶が突然に所望の位置から離れ、また、ライザの切り離し及びドリルストリングの切断といった緊急処置が実行されなければならなかった。他の例は、縦揺れ補償における加速度測定信号の突然の損失である。この場合、システムは、船舶の縦揺れ動作の正確な補償を与えることができず、また、海底の特定の場所に負荷を設置する最中に、或いは、船舶と海底を貫通する井戸との間に回転ドリルストリングが配置された掘削ライザの縦揺れ補償において、負荷が波領域又は海底の近傍にある場合には、困難な状況が生じる可能性がある。
【0060】
船舶の場所、速度又は進路、実際の天候、実際の海況、1つ又はそれ以上のセンサ信号における一連のエラー、以前に結果が記録された故障状況になった一連のコマンド入力信号、が組み合わされた形の状況を考える。そのような状況は、検査される制御システムが結果的に制御システム故障となることなく状況を処理できるかどうかを確かめるために検査目的で再現されてもよい。
【0061】
本発明の一実施形態に係る提案された手法は、シミュレートセンサ信号(7a’、7b’、……)及びシミュレートコマンド入力信号(9a’、9b’、……)の形態を成す入力を用いて制御システムを実行することにより所定の船舶における制御システム(2)を検査することであり、また、その場合、制御信号(13a、13b、……)の形態を成す制御システム(2)の出力は、シミュレート船舶モデル(30)への制御信号として使用される。制御システムのための検査シナリオは、所定の船舶の検査が行なわれるべき一連のテストケースの形で作られる。各テストケースは、特定の海況、特定の風速(7d’)、及び風向(7d’)、特定の水流速度(7k)及び潮流方向(7l)、所定の一連のコマンド入力信号(9a’、9b’、9c’、……)によって与えられる。また、各テストケースは、シミュレートセンサ信号(7a’、7b’、7c’、……)に対して加えられる一連の所定のエラー、例えば、1つ又はそれ以上のDGPS受信器における75mの更なるステップ変化(図4a3参照)、すなわち、所謂ワイルドポイント(w)を伴っていてもよい。この場合、位置信号は、0から50mへと突然に変化してその直後に0へ戻る更なるエラー、1つ又はそれ以上のGPS受信器における1m/sの安定したドリフトの形態を成すエラー、DGPS受信器(8a)又は水中音響位置センサなどの1つ又はそれ以上の位置センサにおける2mの急激な変動の形態を成すエラー(図4a4参照)、又は、1つ又はそれ以上のセンサ信号の損失(図4a2参照)を有する。そのようなテストケースを特定するために、前に記録された故障状況における既知の状態が使用されてもよい。
【0062】
一連の検査における各テストケースにおいては、入力センサ信号、入力コマンド信号、結果として生じる制御信号が記録され、また、記録された検査データの解析に基づいて、制御システムが検査において満足に機能したかどうかが決定されるとともに、これに基づいて、制御システムが認可され或いは認可されなくてもよく、また、可能であれば、これに基づいて制御システムが認証されてもよい。
【0063】
2−1 制御システムの署名の取得
序文
例えばDet Norske Veritasなどの分類会社によって検査されて認可された制御システム(2)を考える。この検査及び分類は幾つかの時点で行なわれてもよく、これについては図8を参照されたい:
* 制御システムは、制御システム製造場所での工場承認検査(FAT)時に、シミュレータに対する制御システム(2)の接続に関する検査後直ぐに認証されてもよい。
* その後、制御システムは、造船所(構内)での船舶の試運転時にほぼ最後の構成中で再検査されてもよい。
* 制御システムは、船舶が動作に入っているとき、顧客承認検査(CAT)の直後に認可されて承認される間、本発明の一実施形態に従って検査されてもよい。
* 年次検査又は3年次検査が分類会社又は保険会社による基準要件であってもよい。
* 本発明に係る検査では、制御システムの一部又は全体の再プログラミング後、センサの交換又は修理後、新たなセンサの設置後、制御システム入力に直接に関連するコマンドコンソール等の交換又は修理の後に、連続的な制御システムの調子をチェックすることが必要とされてもよい。そのような変更後、変更前に認められた制御システムの認可又は認証はもはや無効でなければならない。
* 船舶の修理変更、例えば大きな或いは新たなクレーンの搭載、船体の変更又は引き延ばし、掘削又は製造ライザのための縦揺れ補償システム又は掘削やぐらの変更などは、制御システムの再構成を含んでいてもよく、また、再認証のための制御システムの検査をもたらさなければならない。
【0064】
2−2 制御システム署名の確立の概要
認可又は認証後に想定され得る変更が実際に制御システム(2)に対して行なわれたかどかを明らかにするために、検査が完了して船が認可された後に制御システム出力基準「署名」S0を確立するとともに、その後のシステムの検査と比較するために上記署名S0を記憶することが提案される。以下、この方法について詳細に説明する。
【0065】
署名S0は、実際のセンサ信号(7a、7b、7c、……)及び実入力コマンド信号(9a、9b、9c、……)の代わりに好ましくは1つ又はそれ以上の人工センサ信号(7a’、7b’、……)及び制御システム(2)に対する入力として使用するための入力コマンド信号(9a’、9b’、……)から成る所定のシーケンスT0を生成することにより、また、結果として得られる制御システム(2)からの出力を、この場合には好ましくはアクチュエータ(17、18、19)へ送られてもよい制御信号(13a、13b、13c、……)の形態を成す署名(S0)として記録することにより、本発明の好ましい実施形態に従って確立される。好ましい実施形態において、この当初の署名(S0)は、このとき、制御信号の完全な時間区分履歴である。
【0066】
(その後の検査)
制御システム(2)が変更されたかどうかを検査するために、幾つかのその後の時間(t1、t2、t3、……)において同じ入力シーケンスT0が制御システム(2)に対して入力されるとともに、その結果として得られる制御信号(13a、13b、13c、……)の形態を成す出力が新たなシステム応答すなわち「署名」(S1、S2、S3、……)として記録される。上記制御システム(2)が交換されたか或いは変更されたかどうかを決定するためには、当初の署名(S0)と新たな署名(S1、S2、S3、……)との間で比較が行なわれなければならない。
【0067】
2.3 制御システム署名の確立の詳細
更に詳細には、本発明の好ましい実施形態は、船舶(4)の制御システム(2)を検証するための方法を含む。上記制御システム(2)は、その動作状態において、センサ(8)からのセンサ信号(7)及び1つ又はそれ以上のコマンド入力装置(10)からのコマンド信号(9)を受信する。制御システム(2)は、上記測定値(7)及びコマンド信号(9)に対する応答として、制御信号(13)を上記船舶のアクチュエータ(3)に対して供給することにより、上記船舶(4)の所望の位置、速度、進路又は他の状態変数を維持する。
方法は、次のステップによって特徴付けられる。
* 第1の時間(t0)中に、上記制御システム(2)に対する1つ又はそれ以上の実際のセンサ信号(7a、7b、7c、……)の受信を切り離して、上記実際のセンサ信号のうちの上記1つ又はそれ以上を、検査信号源(41)から上記制御システム(2)への1つ又はそれ以上の人工の測定値(7a’、7b’、7c’、……)を含む第1の検査シーケンス(T0)と置き換えるステップ
* その後、上記実際の及び/又は人工のセンサ信号(7、7’)に基づいて上記制御システム(2)を機能させて、上記第1の時間(t0)における上記第1の検査シーケンス(T0)に対する応答(S0)として上記制御システム(2)の制御信号(13)として制御信号ロガー(42)に記録される制御信号(13’)を生成するステップ
* その後、上記第1の時間(t0)において上記第1の検査シーケンス(T0)に対する上記制御システム(2)の応答(S0)を上記制御システム(2)の「署名」応答(S0)として記憶するステップ
【0068】
この方法は、その後の時間(t1、t2、t3、……)において、上記制御システム(2)に対して入力される同じ所定の検査シーケンス(T0)を使用して、上記制御システム(2)からのその後の応答(S1、S2、S3、……)を記録するとともに、上記その後の応答(S1、S2、S3、……)が上記署名応答(S0)にほぼ類似しているかどうかを決定して、上記制御システム(2)が変更されていないことを検証し、或いは、上記その後の応答(S1、S2、S3、……)が上記署名応答(S0)と大きく異なるかどうかを決定して、上記制御システム(2)が変更されたことを示すという目的を有している。
【0069】
2−4 「署名」S0との比較
その後の取得されたシステムシーケンスS1は、本発明に従って、当初のシステム応答すなわち「署名」S0と比較される。S0とS1との間に殆ど差がない場合には、システムは変更されていないと見なされ、新たな認可又は認証のための新たな検査を行なう必要がない。S0とS1との間に大きな差がある場合には、制御システムが変更されたものと判断されて、認可又は認証がもはや有効でなくなり、新たな認可/認証検査を行なわなければならない。大きな差が何であるかを決定するためには、現実的に幾つかの限界を考慮しなければならない。署名S0、S1及びその後のシステム応答は、検査シーケンスT0のように何らかのノイズ及び高周波成分を含む場合があり、そのため、所得されたシステム応答は決して完全に等しくない。以下、差を計算するための方法の概要を説明する。
【0070】
2−5 差の計算
本発明の好ましい実施形態において、以下の計算方法は、時間t0において記録された上記制御システムの当初の応答(S0)とt0後から数週間、数ヶ月又は数年程度経過したt1において記録されたその後の応答(S1)との間の差を決定するために使用されてもよい。制御信号は、当初の応答S0を確立するためにt0で開始された検査中に、或いは、応答S1を確立するために時間t1で開始された検査中に、数秒程度の間隔の時刻u1、u2、……un……、uNにおいて記録される。各時刻u1、u2、……un……、uNにおいて、制御システムは、制御チャンネル信号等(13a、13b、13c、……、13K)を含む幾つかの制御信号を出力し、これらを我々は多次元信号と呼んでもよい。時間unにおけるシーケンスS0の多次元値を、
S0(un,1,un,2,un,3,un,4,…….,un,m,……,un,k)
で示している(ここで、unにおける第1の添字nは1つの時刻を示し、第2の添字1、2、3、4、……m、……、Kは制御チャンネル信号等(13a、13b、13c、……、13m、……、13K)を示している)。同様に、時間unにおけるシーケンスS1の多次元値は、
S1(un,1,un,2,un,3,un,4,…….,un,m,……,un,k)
である。無作為な性質を有する可能性があるシーケンスS0及びS1の高周波成分を除去するため、シーケンスS0、S1はローパスフィルタリングされる。S0のフィルタ処理バージョンは、SF0と名付けられ、時間unでは、
SF0(un,1,un,2,un,3,un,4,……,un,m,……,un,k)
で示される。S1のフィルタ処理バージョンは、SF1と名付けられ、時間unでは、
SF1(un,1,un,2,un,3,un,4,……,un,m,……,un,k)
で示される。その後、S0とS1との間の差は、SF0とSF1との間の差におけるRMS値に関して特徴付けられる。これは以下のように計算されてもよい。
RMS(SF0,SF1)={[SF1((u1))−SF0((u1))]2+[SF1((u2))−SF0((u2))]2+……+[SF1((uN))−SF0((uN))]2}の平方根
(ここで、測定値SF0((u1))及びSF1((u1))のそれぞれが、一般に前述したような多次元である点を考慮しなければならない。)
【0071】
エンジンパワーコマンド出力、方向舵角度コマンド出力、スラスタ角度コマンド出力などのS0制御信号パラメータとS1制御信号パラメータとの間の差には、それらの実際の性質に従って重みが与えられなければならない。
【0072】
RMSは、2つのシーケンスSF0、SF1間の差の加重平均値と見なすことができる。RMS(S0、S1)が何らかの閾値、例えば0.01又は1%よりも大きい場合には、制御システムが変更され或は修正された可能性が大きく、認可又は認証のために新たな検査を行なわなければならない。或いは、RMS(S0、S1)が閾値よりも小さい場合には、システムが変更されていないと考えられ、認可及び/又は認証が有効であると考えることができる。比較の質を更に高めるため、S0及びS1に関連する警告及びイベントリストが定性的に解析されてもよい。
【0073】
3−1 制御システムの個々の部分のための署名の確立
署名を生成するための前述した方法は、制御システム全体のための署名を生成するために使用することができ、或いは、統合された制御システムの組へと拡張することができる。他の手法は署名の組を生成することであり、この場合、各署名は、センサの特定の組又は制御システムの特定の機能に関連する制御システムの性能に関連付けられる。その後の手続きでは、1つ又はそれ以上のセンサから成るセンサ群1から人工センサ信号(7a’、7b’、7c’、……)の所定のシーケンスTG10が生成され、また、署名SG10がセンサ群G1に関連していた場合には、その結果として得られる出力が制御信号(13a、13b、13c、……)の形態を成す署名SG10として記録される。その後、センサ群2から人工センサ信号の所定のシーケンスTG20が生成され、その結果として得られる出力がセンサ群2に関連する署名SG20として記録される。このようにして進めると、入力シーケンス(TG10、TG2、TG30、……)の連続入力及び対応する出力の記録により、規定されたセンサ群G1、G2、G3、……のための署名(S10、S20、S30、……)が確立される。センサ群G1はGPS受信器であってもよく、センサ群G2は水中音響位置センサであってもよく、センサ群G3はGPSと水中音響センサとの組み合わせ等であってもよい。
【0074】
更に、人工コマンド入力信号(9a’、9b’、……)の入力シーケンスTC10、TC20、TC30、……の組は、コマンド入力信号の異なる組み合わせC1、C2、C3、……に関してシステムを検査するために生成される。その結果として得られる出力は、制御信号(13a、13b、13c、……)の形態を成す署名SC10、SC20、SC30、……として記録される。この場合、署名SC10、SC20、SC30、……は、コマンド入力信号の組み合わせC1、C2、C3、……に関連付けられる。
【0075】
その後、前述したように、システム全体のための信号署名の場合には、その後の時間(t1、t2、t3、……)において制御システムを検査することができる。nの番号が付された検査においては、応答SG1n、SG2n、SG3n、……及びSC1n、SC2n、SC3n、……につながる入力シーケンスTG1n、TG2n、TG3n、……及びTC1n、TC2n、TC3n、……が存在する。その後、SG1n、SG2n、SG3n、……及びSC1n、SC2n、SC3n、……と署名SG10、SG20、SG30、……及びSC10、SC20、SC30、……とを比較するとともに、どの応答が当初の署名と異なるのかに注目することにより、どのセンサ群又は入力信号のどの組み合わせが署名の変化をもたらすのかを決定することができる。前述したように、SG1nがSG10と異なることが計算される場合には、制御システムが変更されてしまっており、制御システムの変化がセンサ群G1等に関連付けられる。前述したように、SC1nがSC10と異なることが計算される場合には、制御システムが変更されてしまっており、制御システムの変化が入力コマンド信号における組み合わせC1等に関連付けられる。
【図面の簡単な説明】
【0076】
【図1】制御システムを有する船舶を示す図である。制御システムは、位置、進路、速度の測定値及び他の測定値を航行機器から受けるとともに、位置指定装置、制御システムの制御パネル、速度指定装置、プロペラ又は可能であればスラスタのための速度又はシャフト速度指定装置からコマンドを受ける。また、制御システムは、相対風向及び相対風速の測定値を風速計から受けることができるとともに、海況に関する情報、すなわち、波の上昇、ロール周期、ピッチングなどを受け或いは計算することができる。制御システムは、所望の位置、進路、速度が得られるように、シャフト速度をプロペラへ連続的に出力し、角度を方向舵へ連続的に出力するように構成されている。
【図2】製造後の制御システムの工場承認検査「FAT」を示す図である。制御システムは、船舶用に形成されるが、船舶に設置されていない。制御システムは、シミュレートセンサ信号とのインタフェースに接続される。制御システムは、アクチュエータに接続されていないがアクチュエータを対象とする制御信号の形態を成す応答を与える。しかしながら、FATは、船舶の最終的な構造を反映しなくてもよい。これは、他のクレーン、他の縦揺れ補償システム、他の新たに開発されたセンサが最終的に進水されて検査される船舶と共に使用される場合があり、そのため、FATが最終的にクラス協会船舶検査認可の時点で関連しなくなる場合があるからである。
【図3】船のための公知の制御システムの一般的な構成を示す図である。関連するセンサ、コマンド入力装置、アクチュエータの全てが船の制御システムに接続されている。
【図4a1】離れたシミュレーション位置にある船舶シミュレータをロガーと共に示す図である。両方とも、シミュレーション位置にある第1のリアルタイムインタフェースを介して、また、リアルタイム制御、シミュレーション、記録のための1つ又はそれ以上の通信チャンネルを用いて、例えば少なくとも1つの船舶上の制御・監視システムなどの制御システムに更に接続されるリアルタイム制御、シミュレーション、記録のための1つ又はそれ以上のリアルタイムインタフェースに対して接続されている。シミュレーション位置は、例えばDet Norske Veritas, American Bureau of Shipping,Germanischer Lloyd,Lloyd's Registerのような陸上のいわゆるクラス協会又は他のクラス協会の実験室にあってもよい。或いは、信号転送遅延或いはコンピュータ通信の遅延に起因する想定され得るエラー、又は、距離に起因する電磁気伝播遅延に伴うエラーを防止するため、シミュレータ装置は、検査される船上に配置されてもよい。
【図4a2】例えば位置、進路、速度、風向などの人工測定値の検査シーケンスT0を図の左側に示し、この検査シーケンスT0から結果として得られる制御システムからの応答S0を図の右側に示している図である。検査シーケンスS0の人工測定値は、この図では、関連するが最も粗い近似値である単なる「信号存在」又は「信号欠如」となっている。図の右側には、検査シーケンスに対する制御システム出力応答の組Sが示されているが、必ずしもこの図に示される検査シーケンスである必要はない。
【図4a3】図4a2に類似しているが、測定値の想定され得るエラーの他の考えられる近似値である「ステップ変化」を有するシミュレート検査信号を示す図である。
【図4a4】想定され得るシミュレート検査信号の更に現実的なイメージであり、前述の欠如/存在信号、ステップ変化信号、急激に変化する連続信号、緩慢なドリフト信号、幾つかのエラーがほぼ同時に或いは互いに重なり合って生じる時間を示す図である。
【図4a5】最初の検査署名と制御システムのその後の制御信号取得との間で制御信号を比較する際に制御システムの応答が変化したか否かを決定するための比較・決定プロセスのためのモデルを示す図である。
【図4b】制御システムを有する船舶を示す図である。この制御システムにあっては、1つ又はそれ以上の実際のセンサ信号が検査室に対する通信ライン介してシミュレートセンサ信号に置き換えられ、また、制御システムから船舶のアクチュエータへの1つ又はそれ以上の制御信号は、好ましくは船舶のアクチュエータに送られる代わりに、通信ラインを介して検査室へと送り戻される。
【図4c】一般に船舶の制御システムに対して測定値を供給するピッチ、ロール、風速、風向のためのセンサの組、GPS位置センサ、DGPS位置センサ、水中音響位置センサなどが通信ラインを介して遠隔検査室からのシミュレート測定値と置き換えられる船舶を示す図である。制御システムは、シミュレート測定値に対して応答する。応答は、通常、船舶のアクチュエータ、例えばプロペラ、方向舵、トンネルスラスタ、アジマススラスタに対して制御信号を与える。代わりに、応答が通信ラインを介して遠隔検査室へ送られる。遠隔検査室では、例えばアルゴリズムの形態を成す船舶シミュレータが、遠く離れた船舶の制御システムからの制御信号に応じてシミュレート船舶の動的な動作を計算するとともに、更新される制御信号などの形態を成す新たな応答のため、船舶の新たな状態を遠く離れた上記制御システムへ送り戻す。
【図5】(xを中心とする)ロール、(yを中心とする)ピッチ、(zを中心とする)ヨーのような回転動作、及び、(xに沿う)うねり、(yに沿う)横揺れ、(zに沿う)縦揺れのような並進動作の形態を成す船舶の動きの概略を示す図である。
【図6】動的位置決めに関与する、例えば係留しない(ある場合には係留を伴う)石油掘削に関与する重要な縦揺れ、横揺れ、ヨーの船舶の動きの概略を示す図である。
【図7】掘削中に動的位置決めの下で掘削プラットフォームを制御するために制御システムが使用される本発明の使用に関連する問題の略図を示す図である。実際の位置及び所望の位置がボールドフェース「X」でマーキングされている。
【図8】船舶のプランニング、建設、試運転、海上試運転、動作中に船舶の制御システムを検査する一般的な時点におけるタイムラインを示す図である。
【図9】2部品シミュレータ構成を備える本発明の好ましい実施形態を示す図である。この2部品構成は、船上の制御システムへの通常のセンサ信号ライン及びコマンド信号ラインに接続するためのカスタム配置されたスイッチ又はコネクタを有する第1の船上オンラインシミュレーティングコンピュータを備えており、カスタム配置されたスイッチ又はコネクタは制御信号を出力するためのものであり、また、遠隔検査室の検査マネージャ(33)に対する通信ラインが設けられている。
【図10】図9と同様の図であり、2部品シミュレータ構成を備える本発明の第2の好ましい実施形態を示す図である。この2部品構成は、船上の制御システムへ接続するための制御システムメーカ設計のインタフェースを有する船上オンラインシミュレーティングコンピュータを備えており、また、遠隔検査室の検査マネージャ(33)に対する通信ラインが設けられている。
【符号の説明】
【0077】
1:−
2:制御システム(2)
3:アクチュエータ(プロペラ16、スラスタ17、方向舵18)
4:船舶、船、掘削船、ドリリングプラットフォーム、製造プラットフォーム、或いは、他の航洋船
4’:シミュレート船舶、一般にシミュレータアルゴリズムを備える近くの或いは遠隔のシミュレータ(30R又は30L)における船舶モデル
5:船舶の動的パラメータ。5a:質量m、5b:5c:質量中心の位置、5c、5d、5e:船舶軸周りの慣性モーメント、質量分布、船体パラメータなど
6:遠隔検査室(40)における第1のリアルタイムインタフェース(6a)、並びに、第1の船舶(4a)及び第2の船舶(4b)側の第2のリアルタイムインタフェース(6b)を含む通信ライン
7:センサ(8)からのセンサ信号:7a:位置、7b:進路、7c:速度、7d:風速(相対風速)、7e:風向(相対的風向)、7f:ピッチ角度、7g:ロール角度、7h:海底のトラン4’スポンダに対する水中音響(相対)位置、7i:GPS/慣性位置及び進路(7j)、潮流速度(7k)、潮流方向(7l)
7’:一般にシミュレータアルゴリズム(32)を備える近くの或いは遠隔のシミュレータ(30R又は30L)で計算された或いは所定のシミュレート船舶(4’)におけるシミュレートセンサ信号
8:センサ:8a:位置センサ、8b:(ジャイロ)−コンパス、8c:速度センサ、8d:風速センサ、8e:風向センサ、8f:ピッチセンサ、8g:ロールセンサ、8h:水中音響位置センサ、8i:位置及び進路の「シーパス200」GPS/慣性センサ(8j)
9:コマンド入力装置(10)からのコマンド信号:9a:所望の位置、9b:所望の進路、9c:所望の速度など
9’:シミュレートコマンド信号
10:コマンド入力装置:所望の位置9aを指定するための位置指定装置10a、所望の進路9bを指定するためのホイール10b、所望の速度を指定するための速度指定装置10cなど
11:制御システム(2)へのコマンド信号(9)のための1つ又はそれ以上のコマンド信号ライン又は通信バス
12:制御システム(2)へのセンサ信号(7)のための1つ又はそれ以上のセンサ信号ライン又は通信バス
13:プロペラ(16)及びスラスタ(17)におけるシャフト速度(13a、13b)、並びに、方向舵(18)又はスラスタ(17)における角度(13c)を含む制御信号
13’:遠隔検査室(40)へ送られる制御信号
14:制御システム(2)からアクチュエータ(3)(16、17、18)への1つ又はそれ以上の第3の信号ライン(14)又は通信バス
15:データロガー
15a、15b、15c:センサ信号(7)、コマンド信号(9)が制御システム(2)に入らないように切り離すとともに、上記制御システム(2)からの出力制御信号(13)を切り離し、また、ローカルシミュレータ(32L)への及びローカルシミュレータ(32L)からの人工センサ信号(7’)、人工コマンド信号(9’)、出力制御信号(13’)を遠隔検査室(40)からの通信ライン(6)を介して直接的又は間接的に接続するためのスイッチ
16:プロペラ(16)
17:スラスタ(17)
18:方向舵(18):(「アクチュエータ」(3)も)
19:状態信号
30:船舶シミュレータ、すなわち、遠隔検査室(40)に配置された船舶シミュレータ(30R)又は局所的に配置された船舶シミュレータ(30L)を有するコンピュータ
30R:遠隔検査室(40)に配置された船舶シミュレータ(30R)を有するコンピュータ
30L:検査される船又は船舶に局所的に配置された船舶シミュレータ(30L)を有するコンピュータ
31:センサ信号(7)、コマンド信号(9)、船舶(4)の動的パラメータ(5)に基づいて船舶アクチュエータ(16、17、18)への制御信号(13)を計算するとともに、制御信号(13)を信号ライン(14)を介して例えばプロペラ(16)、スラスタ(17)、方向舵(18)等のアクチュエータ(3)へ送信するための制御アルゴリズム(31)
32:船舶パラメータ(5)、シミュレートされた風速及び風向、シミュレートされた波の上昇及び波の方向、シミュレートされた潮流速度及び潮流方向などに基づいてセンサ信号(7’)に対応するシミュレート状態(50’)によって与えられる船舶の動的な動き及び船舶(4)のアクチュエータ(3)の力を計算するための上記船舶シミュレータコンピュータ(30)におけるアルゴリズム
33:検査マネージャアルゴリズム(34)を有するコンピュータ
34:バッチ形式で検査内容を船舶シミュレータ(30L/30R)に対して出力するとともに、結果として得られる制御システム(2)からの制御信号をバッチ形式で入力する検査マネージャアルゴリズム
40:遠隔検査室
41R:人工測定値(7a’、7b’、7c’、……)を上記制御システム(2)へ供給するために上記遠隔検査室(40)に配置された遠隔検査信号源(41R)
41L:人工測定値(7a’、7b’、7c’、……)を上記制御システム(2)へ供給するために検査される船舶(4)又はその近傍に配置されたローカル検査信号源(41L)
42:上記所定の人工測定信号シーケンス(T0)に対する上記制御システム(2)からの応答(S0)又は上記与えられたシーケンス(T0)(或いは、他の与えられた又は自然に生じる又は任意の測定値シーケンス(T1、T2、T3、……))に対するその後の応答(S1、S2、S3、……)を記録する制御信号ロガー(42)
43:人工コマンド信号(9a’、9b’、9c’、……)を生成するための検査コマンド装置(43)
44:上記制御システム署名応答(S0)を形成するために使用される上記検査シーケンス(T0)を記憶し又は/及びその後の検査シーケンス(T1、T2、T3、……)を記憶するための上記検査信号源(41R/41L)に接続されるメモリ(44)
50:縦揺れ、横揺れ、ヨーにおける速度、ロール、ピッチ、ヨーにおける角速度、x、y、zにおける位置、ロー、ピッチ、ヨーにおける角度、プロペラのシャフト速度及び方向舵の角度などのアクチュエータの状態変数のような1つ又はそれ以上の変数を含む船舶(4)の状態(50)であり、これにより、所定の時刻における状態(50)は、上記時刻における船舶及びアクチュエータの動きを独自に規定する。状態(50)は、センサ信号(9)に対応し、センサ信号(9)は、一般に上記状態(50)の一部における値を含む。
50’:上記シミュレータ(30)によって計算されたシミュレート船舶(4’)のシミュレート状態(50’)。上記シミュレート状態(50’)は、状態(50)の変数のシミュレート値を含み、状態(50’)は、シミュレートセンサ信号(9’)に対応している。
T0:人工測定値(7a’、7b’、7c’、……)の第1の検査シーケンス
S0:コマンド信号(13a、13b、13c、……)を含む第1のコマンドシステム応答
【技術分野】
【0001】
本発明は、クラス協会による検査及び/又は認証によって船舶を認可した後に検証可能な制御システムの署名を取得するためのシステムに関する。また、本発明は、船舶の遠隔検査、及び、2つの方法の組み合わせ、すなわち、制御システム署名の遠隔取得に関する。更に、遠隔制御される検査及び船舶シミュレーションのためのシステムが提供される。
【背景技術】
【0002】
制御システムは、一般に、物理的プロセスに対して制御信号を供給し且つ装置又は物理的プロセスから、可能であれば他の物理的プロセスから測定値を受けるシステムと見なすことができる。制御信号を計算するために測定値及びアルゴリズムが使用され、それにより、物理的なシステムが所望通りに応答する。物理的プロセスがモータ駆動の船舶である場合、制御システムは、船舶位置、進路、速度の形態を成す測定値を受けてもよく、また、それによりプロペラ及び方向舵への制御信号を計算することができ、その結果、1つ又はそれ以上の船舶位置、進路、速度が得られ或いは維持される。
【0003】
(課題説明)
この場合には、船舶の形態を成す物理的プロセスは、風、波、潮流の変化などの外的な事象によって、或いは、1つ又はそれ以上のプロペラにおけるモータ出力の損失及び方向舵の機能の故障等の非外的事象によって影響される場合がある。船舶における制御システムは、船舶が安全な状態を維持できるように外的影響及び外的事象を処理可能であることが望まれ且つ期待される。安全な状態は、例えば、船舶が所望の位置又は速度を維持する状態、船舶が望ましくない位置を回避する(衝突又は座礁を回避するため)状態、船舶が制御されていないドリフトの状況を回避する状態、船舶が所望の進路を維持する状態等であってもよい。また、センサ信号損失又はセンサのエラーの場合に、ロールセンサ又はピッチセンサの実際の信号の損失に応じてバラストポンピングが突然に変化し、或いは、位置の明らかなエラーを突然に修正するといった望ましくない不適切な補償を制御システムが行なわないことが期待される。
【0004】
(制御システムの測定)
測定値を与える機器からの入力部と、制御信号が与えられるべきプロペラ装置、操舵面、他の制御装置といったアクチュエータへの出力部とを有する船用の制御システムが図1及び図3に示されている。このタイプの制御システムは、以下に示す多数のソースからセンサ信号の形態を成す測定値を受けることができる:
− ロール/ピッチ/縦揺れセンサ
− 相対風速及び風向を測定するための風速計
− ジャイロコンパス
− GPSセンサ又はGPS位置決めシステム
− 加速度測定値に基づいて時間に関して積分することにより速度を計算し、時間に関して2回積分することにより位置を計算する慣性航法システム
− 海底の固定点に関連する水中音響位置センサ
− 船舶から海底の複数の点までの1つ又はそれ以上のテンションワイヤの方向及び長さが観察されるトートワイヤシステム
− 船舶の進路の変化又は所望の進路、所望の位置、又は、所望の速度に関するコマンド信号
− プロペラ及びモータにおけるシャフト速度及び負荷
− 方向舵角度センサ
− 船荷タンクのためのレベルセンサ
− バラストレベルセンサ
− 燃料レベルセンサ
− エンジン状態、冷却水温度、冷却水バルブ、潤滑油の圧力及びレベルなど。
制御システムは、プロペラなどのアクチュエータ、操舵面、他の制御装置に対して制御信号を与えなければならない。プロパルサは、通常のプロペラ、トンネルスラスタ、アジマススラスタ、ウォータジェットであってもよく、また、一部の船舶においては、船舶を正しい位置まで引張るように構成された係留システムであってもよい。操舵面は、操縦用の方向舵、及び、波の動きを減衰させ或いは波の動きに対抗するためのアクティブホイルを含む。また、制御信号は、バラストポンプ、ロール角やピッチ角を修正するための関連するバルブなどの他の制御装置に対して与えることもできる。
【0005】
(動的位置決めDPのための制御に伴う問題)
船舶が石油掘削船又はプラットフォーム製造船、例えば掘削船や掘削プラットフォーム、石油製造船又は石油製造プラットフォームである場合には、制御システムは、縦揺れ加速度計から縦揺れ動作の測定値を受けてもよく、また、ライザ、ドリルストリング、クレーン等のための能動的縦揺れ補償システムに対して制御信号を出力してもよい。この場合、海底に機械的装置を接続することができ、また、船舶の動き、特に縦揺れを補償することが重要となり得る。海上での石油活動のための制御システムの通常の使用は、船舶の動的な位置決めのためである。すなわち、船舶は、アジマススラスタなどのアクチュエータを使用して、掘削中又は石油製造中に所望の位置を維持する。また、係留され且つ海底へ延びる係留ラインと共に回転タレットを中心に回転することができる船舶は、プロペラやスラスタに対して様々な制御信号を与えることにより天候の方向又は潮流の変化に起因して船舶が回転される際に所望の位置を維持するのを助ける制御システムを有することもでき、それにより、スラスタは、力をもって、力が回転する際の係留ラインの張力変化を補償するべく寄与する。同様に、同じ理由で、制御システムに制御信号を与えて、係留ラインの張力を増大又は減少できることが考えられてもよい。
【0006】
(船舶の制御システムの検査に伴う問題)
船舶検査官が船を訪れて船上で制御システムの検査を行なうことができる。船上検査は、センサシステムを切り離し或いは接続するとともに、様々な故障状況でシステムの応答を監視することにより行なわれてもよい。しかしながら、期待されるべき条件で船舶の現実的な検査を全体的に行なうためには、期待されるが滅多に生じることがない天候状況及び海況を待ち或いは求めることが必要であり、若しくは、特定の異常が生じた場合に期待できるがそのような状況が偶然に或いは刺激によって生じた場合には危険となり得るような状況を待ち或いは引き起こすことが必要である。制御システムがエラーの正確な補償のための制御信号を与えるかどうかをチェックするため、バラスト分布の異常に大きいエラーなどの極端な状況に船舶を晒すことは選択肢として殆ど考慮されない。そのような種類の検査は一般に行なわれない。
【0007】
船上の制御システムへのセンサデータのシミュレーションを行なうとともに、制御システムがプロペラ、方向舵、スラスタなどのアクチュエータに対して与える制御信号がどれであるかを監視することは可能であるが、これには、検査システムに対する制御システムの局所的な相互接続が必要である。しかしながら、そのような検査は、本出願人の知識によれば、この出願を提出するときに公知ではない。そのような相互接続及び検査は船上で行なうことができるが、検査される船舶を訪れるという欠点は、しばしば、船舶検査官の長い移動を伴い、船舶検査官は、測定のために制御システム入力に対して相互接続される機器と、船舶のアクチュエータに対して一般に送られる制御信号の形態を成す応答のための制御システム出力に対して相互接続される機器とを持って行かなければならず、また、少なくとも検査される実際の船舶の構造を含んでいなければならないデータライブラリを持って行かなければならない。また、検査されて認証される1つの船舶から次の船舶までの移動時間により、検査官は、十分に高い比率で検査を行なうことが難しくなる可能性があり、そのため、検査が行なわれて適切に認証されなければ船舶を使用できない場合には、次の船は待たなくてはならず、待つことにより経済的な不利益が生じる。また、制御システムの検査の欠如により想定され得るエラーが明らかにされない船舶を使用すると、隠れた物理的危険を引き起こす場合がある。
【0008】
以上の結果から、ある時間の後に或いは船舶の任意の必須部品の変更後に制御システムが再検査又は再認可されるべきか否かを表示するために、制御システムが認証時と同じ応答を有することを検証するための方法が必要である。
【0009】
制御システムの工場製造においては、制御システム(ハードウェア及びソフトウェアを含む)のいわゆる工場承認検査(FAT)を行なうことが一般的である。この場合、製造メーカは、シミュレートセンサデータを制御システムに供給するとともに、制御システムがシミュレータデータに対する応答としてどの制御信号を与えるのかを監視する。この種のFATは、製造メーカが存在すると予見したソースからの測定値のエラーしか明らかにすることができない。また、この場合、制御信号は、製造メーカが予見した機器にのみ関連付けられる。従って、制御システムの製造メーカが予見しなかった機器、構成、又は、状況と制御システムがどのように相互作用するのかは確かに分からない。また、FATにおいて、制御システムは、制御システムが船上での使用のために設置されて接続される接続場所で検査されない。
【0010】
(動的位置決めにおける実用的問題の例)
プロペラ、方向舵、又は、トンネルタイプ或いはアジマスタイプのスラスタの所望位置に保持される船舶(4)の動的な位置決めにおいては、船舶が所望の位置から非常に小さい半径内で、例えば2mの半径内でその位置を維持することが動作に不可欠となる場合がある。幾つかの事象が望ましくない場合がある。船舶は、1つ又はそれ以上のプロペラ又は方向舵に関してモータ出力の損失に直面する場合があり、また、残りのプロペラ及び/又はスラスタにおけるモータ出力を増大しなければならず、また、おそらく、未だ機能する残りの方向舵又はスラスタを回転しなければならない。また、制御システムが関連するセンサからの信号の一部を失い、それにより、望ましくない出来事が生じ得るような重大な異常状況に直面する場合もある。本発明者らは、船舶、実際のケースでは掘削プラットフォームが外洋の所定の位置に配置されなければならず且つ海底に油井を形成するために掘削していた事例についての知識を持っている。掘削プラットフォームは、いわゆる動的位置決めすなわち「DP」によって望ましい所定の位置を維持しなければならなかった。つまり、制御システムは、海底に延びる係留ラインを使用することなく、位置測定及びモータ出力によって船舶を所望の位置に維持するようになっていた。掘削プラットフォームには、多数の航海衛星から受けられる無線信号に基づいて船舶の地理的位置を計算する2組のDGPS受信器が設けられていた。また、掘削プラットフォームには、海底の固定された点にあるトランスポンダに対する船舶の位置を測定する2組の水通音響位置センサが設けられていた。掘削中の所定の時間に、油井頭に対するライサ接続部を有し且つ掘削穴に対するドリルストリング接続部を有する船舶が積極的に掘削を行ない、DGPS受信器が約75mの突然の位置変化を示すように事象が行なわれたが、そのような位置変化は実際には生じなかった。そのようなエラーは「ステップ変化」エラーと名付けられてもよい。水中音響センサは、掘削穴にわたって所望の位置で安定位置を表示し続けた。制御システムは、プロペラ及び方向舵を制御し続け、それにより、掘削プラットフォームは、引き続いて、水中音響センサ測定信号に基づき、正確な動的位置で保持された。しかしながら、5分後に、掘削プラットフォームが突然にその時の間違ったDGPS信号に従って所望位置の方へ進み始めることが分かった。ライザを外し、ドリルストリングを切断することを含む関連する緊急処理を行なうことにより、掘削を中断することが必要になった。そのような状況は、ガス及び油が噴出する危険、又は、掘削流体の流出による汚染を伴う場合がある。また、そのような状況は、船舶及び乗組員に危険を与える場合もある。DP掘削の中断後に引き続いて掘削を再開することは非常に費用がかかる場合がある。出願人は、DGPS受信器によって計算された位置の最初の突然の変化が、GPS衛星から受信器への信号送信の乱れによって或いは利用可能な衛星の数が不十分であるという状況によって引き起こされたかもしれないと考えている。実際のものであると見なされるべき前の5分間にわたってそのような計算された位置が安定していなければならないことを必要とする制御システムのソフトウェアの品質状態に起因して、DGPS信号の損失が制御システムによって無視された場合がある。このように、制御システムの設計者は、誤った信号に起因する位置の望ましくない突然の変化を避けることを考えてきたかもしれない。しかしながら、DGPS受信器によって計算された、新しく変更されてはいるが安定した偽りの位置は、5分後に、安定であると見なされた可能性がある、そのため、制御システムの論理プログラムに従って信頼できると見なされ、水中音響トランスポンダによって供給される測定値よりも高い優先度が与えられた可能性がある。これは、掘削が進行中であるという事実にかかわらず、また、位置が不変に保たれなければならないことを水中音響学的に測定された位置が示しているという事実にもかかわらず、制御システムが明らかに所望の位置として判断した新たな位置へ掘削プラットフォームを制御しようとする理由を説明することができる。
【0011】
(船舶の構造変化に関与する問題)
制御システムの再プログラミング
制御システムが船舶で使用するために設置された後にあっては、多くの場合、制御システムのソフトウェアを再プログラミング又は変更する必要がある。これを行なう目的は、プログラムのアルゴリズムにおけるセンサ信号の許容できる変動又は警報限度に関連する数値を変える必要性かもしれず、或いは、制御システムに新たな検査及び機能を導入する必要性である可能性もある。ソフトウェアの再プログラミング又は変更が完了すると、変化が意図する効果(影響)を与えたかどうかを確かめるために、また、変化の結果として新たな意図しないエラーが出現したかどうかを詳しく調べるために、制御システムを検査する必要がある。現在、そのような変化後において船舶の制御システムを検査するための満足な検査機器及び手続は利用できない。
【0012】
(例えばクレーン交換時における既存の制御システムの変更)
油及びガスの探索及び製造に関連する海洋作業は、海底のモジュールに設置及び介入するためのクレーンを有する船舶によって行なわれる。この種のクレーンは、船舶の垂直動作を補償する制御システムを有する。安全−危険状況でのクレーンの動作モード及び機能は、可成りの程度まで、クレーン毎に変わる制御システムのソフトウェアの詳細な設計に依存している。そのようなクレームの機械的構造を検査するための手続きが確立されてきた。これとは異なり、クレーン制御システムのソフトウェアを検査するための確立されたシステム又は方法は存在していない。その理由は、クレーンの応答が、クレーンの機械的構造及び制御システムに加えて、海況及び船舶の動きに依存しているからである。従って、船舶上のクレーンシステムの必要とされる詳細な検査は、船舶の関連する制御システムを含む船舶の動力学、並びに、クレーンの制御システムを含むクレーンの動力学の両方を伴っていなければならない。
【0013】
(制御システムのためのセンサの修理/交換)
制御システムのためのセンサが交換され或いは変更される場合には、警告限度を調整する必要があり、センサ信号における許容可能な変動における限度が必要となる。通常、制御システムは余分なセンサシステムを有し、そのため、同じ物理量を測定するために幾つかのセンサを使用することができる。この一例として、慣性センサ、2つ以上のGPS受信器、2つの水中音響センサシステムによって船舶の位置を測定することができる。これらの測定データから、制御システムにおけるアルゴリズムにより、船舶の位置が決定される。このアルゴリズムは、急激な位置変動下での精度に対する長期安定性などといった精度及び特性に関し、様々なセンサの特性に依存している。センサの交換又は変更は、結果として得られるセンサの新たな組み合わせが制御システムにおいて使用される許容できる位置測定値を与えるかどうかを詳しく調べるために、全てのセンサシステムの検査の必要性を導入する。
【0014】
(アクチュエータの修理/変更/交換)
アクチュエータの交換又は変更後、制御システムは、船舶のための著しく異なる応答を与えてもよい。この理由は、新たな或いは変更されたアクチュエータが、制御システムの開発中に想定されたものとは異なる制御作用を船舶に対して与える場合があるからである。この一例は、動的位置決めのためのスラスタの使用である。この場合、スラスタのシャフト速度と推進力との間の関係は、制御システムが調整されるときに分かっていなければならない。スラスタが変更される場合には、スラスタのシャフト速度と推進力との間の関係は変更されなくてもよいが、システムが仕様に従って実行するかどうかを詳しく調べるために、制御システムを用いて船舶を検査する必要がある。
従って、船舶がその前の構造から変更された場合にも、船舶の制御システムのより効果的な検査が必要であり、また、船舶の古い部品と新しい部品とが以前に組み合わされていなかった場合には、新たな組み合わせで検査しなければならない。
【0015】
(当分野における公知技術)
米国特許第6298318号の「ガイダンスナビゲーション及び制御システムの検査のためのリアルタイムIMU信号エミュレーション方法」は、いわゆる6自由度(6DOF)フライトシミュレータを使用して動きをエミュレート(模倣)することにより航空機を検査するためのエミュレーション方法について記載している。この場合、いわゆる慣性航法モジュールから航空機上の「ガイダンス、ナビゲーション、制御」システムへの信号はシミュレーションによって生成される。この米国特許は、掘削作業中又は何らかの他の形態の定常的作業中の船舶の動的位置決めに関連する問題について論じていないとともに、クレーンの使用、関連する水中機器のナビゲーション、水中音響位置決め機器の組み込み、バラスティングに関連する問題について言及しておらず、また、海洋の波を考慮していない。船は、一般に6DOFを有していないが、その代わり、それが水上艦艇の所要特性である縦揺れ/ロール/ピッチ動作の自己修復作用を有するため3DOFを有する。
【0016】
米国特許第5023791号の「航空機フライト制御のための自動検査装置」は、複数のフライト制御システムを検査するための統合システムの一部としての、航空機のフライト制御システムの検査のための自動検査装置について記載している。自動検査装置は、自動検査装置の動作を制御するプログラム命令を記憶し且つ結果として得られるフライト制御システム検査データを記憶するためのメモリを有するシステムコントローラを有する。自動検査装置は、プログラム命令及び他の情報を自動検査装置に入力し且つシステムコントローラから検査データを出力するためのキーボード、タッチスクリーン、テープドライブを有する。自動検査装置に含まれ且つシステムコントローラによって制御される機器は、航空機のフライト制御システムに入力される検査信号を生成するとともに、結果としてフライト制御システムによって形成される検査データ信号を監視する。自動検査装置は、インタフェースケーブルにより、航空機に含まれる搭載中央メンテナンスコンピュータに対して接続されている。中央メンテナンスコンピュータは、フライト制御システムの機内検査を実行するようにプログラムされ且つ機内検査を実行するためにプログラム命令に従って検査中にシステムコントローラにより制御される不揮発性メモリを有する。
【0017】
米国特許第5541863号の「航空電子工学における仮想統合ソフトウェアテストベッド」は、プロセスと同時に実行し且つ中央プロセスによって同期化されるコンピュータプログラムの選択によりホストコンピュータで航空電子工学ソフトウェアを開発できる航空電子工学における仮想統合ソフトウェアテストベッドについて記載している。開示されたソフトウェアテストベッドは、別個の同期プロセスを使用するとともに、ホストコンピュータで実行するシミュレーションにより或いは実際の機器により航空電子工学装置からの信号を生成することができ、また、実際の航空電子工学ハードウェアから来るデータバス信号及び実際の航空電子工学ハードウェアへと行くデータバス信号は、ホストコンピュータ内のそれらの仮想バスの対応部分にリアルタイム方式で接続されている。
【0018】
米国特許第5260874号の「航空機フライトエミュレーション検査システム」は、フライト時に航空機によって受けられる刺激をエミュレートする刺激を生成する航空機検査システムについて記載している。航空機検査システムは、フライト時に航空機によって受けられる刺激を生成するための多数のプロセッサ制御可能機器を形成するための多数の機器を有する。また、システムは、航空機が晒される刺激に対する様々な航空機部品の応答を監視する多数の機器も有する。プロセッサは、航空機部品からの出力信号に応じて、航空機が空中を飛んでいるときに航空機によって受けられる刺激をエミュレートする刺激を生成するように刺激生成機器に命じる。従って、システムは、フライト時に航空機が晒される刺激に類似する刺激の最初の組(セット)を生成するとともに、航空機が晒される刺激に対する航空機の応答を監視し、それに応じて、航空機に対する刺激の更新された組を生成する。また、システムは航空機部品の出力応答の応答を記録し、それにより、航空機が適切に機能することを保障するように委ねられた作業者によって出力応答を監視することができる。また、システムは、フライトエミュレーション中に航空機を「ループ状に」配置するために使用できるため、航空機搭乗員を養成するために使用することもできる。
【0019】
米国特許6505574号の「クレーンの負荷における垂直動作補償」は、クレーンオペレータからの命令及び測定値に基づいてクレーンを制御する中央プロセッサに測定値を供給するエンコーダ、ブーム角度センサ、回転角度センサ、モーションセンサを使用して、海況によって引き起こされる船舶クレーンの負荷の垂直動作を減少させるための方法及びシステムについて記載している。
【発明の開示】
【発明が解決しようとする課題】
【0020】
(問題の解決策、本発明の短い概要)
前述した問題の一部に対する解決策は、船舶の制御システムを検証するための方法であって、上記制御システムは、その動作状態において、センサからのセンサ信号及び1つ又はそれ以上のコマンド入力装置からのコマンド信号を受信するようになっており、上記制御システムは、上記測定値及びコマンド信号に対する応答として、制御信号を上記船舶のアクチュエータに対して供給することにより、上記船舶の所望の位置、速度、進路又は他の状態変数を維持する方法において、以下の新規なステップ、すなわち、
第1の時間(t0)中に、上記制御システムに対する1つ又はそれ以上の実際のセンサ信号(実センサ信号)の受信を切り離して、上記実際のセンサ信号のうちの上記1つ又はそれ以上を、検査信号源から上記制御システムへの1つ又はそれ以上の人工の測定値を含む第1の検査シーケンス(T0)と置き換えるステップと、
上記実際の及び/又は人工のセンサ信号に基づいて上記制御システムを機能させて、上記第1の時間(t0)における上記第1の検査シーケンス(T0)に対する応答(S0)として上記制御システム(2)の制御信号として制御信号ロガー(42)に記録される制御信号を生成するステップと、
上記第1の時間(t0)における上記第1の検査シーケンス(T0)に対する上記制御システム(2)の応答(S0)を上記制御システム(2)の「署名」応答(S0)として記憶するステップと、
を含み、
その後の時間(t1、t2、t3、……)において、上記制御システム(2)に対して入力される同じ所定の検査シーケンス(T0)を使用して、上記制御システム(2)からのその後の応答(S1、S2、S3、……)を記録するとともに、上記その後の応答(S1、S2、S3、……)が上記署名応答(S0)にほぼ類似しているかどうかを決定して、上記制御システム(2)が変更されていないことを検証し、或いは、上記その後の応答(S1、S2、S3、……)が上記署名応答(S0)と大きく異なるかどうかを決定して、上記制御システム(2)が変更されたことを示すという目的をもっている方法である。
【0021】
本発明の方法の更なるステップは独立請求項において見出される。
【発明を実施するための最良の形態】
【0022】
本発明が図1〜図10の添付図面に示されている。図面は、本発明を例証するように意図されており、本発明を限定するように解釈されるべきではない。本発明は添付の特許請求項によってのみ限定される。
【0023】
1.1 船舶及び制御システムの一般的な説明
ここで、添付図面に示される本発明の幾つかの実施形態を参照して本発明について説明する。本発明は、図4aの概略図に示されるように、また、図4b及び図4cに詳細に示されるように、船、ドリリングプラットフォーム(掘削基地)、石油生成プラットフォーム等の船舶(4)における制御システム(2)を通信チャンネル(6)を介してリアルタイムで検査するためのシステム及び方法を含む。制御システム(2)は、船舶(4)の制御及び監視を含み得る。制御システム(2)の検査は、船舶(4)における正常な状態及び異常な状態のシミュレーション、そのような正常及び異常な状態の通常の変化、例えばシミュレートされた穏やかな海の状態(H1)の通常の動きのシミュレーションを含み得る。また、シミュレートされた異常な海の状態(H2)における通常の動きや、例えば船舶が1つのプロペラ(16)しか有していない場合においてその1つのプロペラ(16)のモータ出力の損失を伴う故障状態をシミュレートしてもよく、また、その結果として生じる所望の進路(7b)から離れるような回転及び所望の位置(7a)から逸れるような漂流状態の動的なシミュレーションを行なってもよい。また、船舶(4)が未だ機能している1つ又はそれ以上のプロペラ(16b、16c、……)を有する場合において1つ又はそれ以上のプロペラ(16a、16b、……)の出力の損失を伴う状態をシミュレートしてもよく、また、1つ又はそれ以上のプロペラの出力損失に対して船舶がどのように反応するかを調べてもよい。
【0024】
以下、船上での局所的な介入又は遠隔検査室(40)から1つ又はそれ以上の船舶(4a、4b、4c……)の制御システム(2)への介入のための図4a1、4b、4cに示されるシステムについて簡単に説明する。
【0025】
本発明に係るシステムは、船舶(4)における制御システム(2)の検査のために設けられており、制御システム(2)は、船舶(4)を制御して監視する。システムは、以下の特徴を備えている。
* 船舶(4)上に設置された1つ又はそれ以上のセンサ(8)は、1つ又はそれ以上のセンサ信号(7)を信号ライン(12)を介して制御システム(2)へ送る。
* 船舶(4)上のコマンド入力装置(10)は、所望の位置、進路、速度(9)等をコマンド信号ライン(11)を介して制御システム(2)に送る。
* 制御システム(2)中のアルゴリズム(31)は、センサ信号(7)及び/又はコマンド信号(9)に基づいて船舶アクチュエータ(3)への制御信号(13)を計算するため、また、制御信号(13)を信号ラインを介してアクチュエータ(3)へ送るために設けられている。
* 1つ又はそれ以上の通信ライン(6)は、1つ又はそれ以上のシミュレートセンサ信号(7’)及び/又はシミュレートコマンド信号(9’)を遠隔検査室(40)から制御システム(2)へ送るようになっていてもよい。遠隔検査室は陸上にあってもよく、また、リアルタイム通信のための機器を検査室内及び検査される各船舶上の両方で利用できなければならない。本発明の他の実施形態において、シミュレートセンサ信号(7’)及び/又はシミュレートコマンド信号(9’)は、局所的に接続された装置から送られてもよい。
* 遠隔検査室は、船舶(4)における前の状態(50’)、制御信号(13、13’)、動的パラメータ(5)に基づいて船舶モデル(4’)の新たなセンサ信号(7’)に対応する新たな動的状態(50’)をシミュレートするためのアルゴリズム(32)を含むシミュレータ(30R)を有していてもよい。また、同様のシミュレータが局所的に設けられてもよく、従って、このシミュレータをローカルシミュレータ(30L)と呼んでもよい。上記ローカルシミュレータ(30L)は、遠隔検査中に生じる時間遅延に起因する同期エラーを補償するため、上記船舶(4)の上記制御システム(2)に接続されている。そのようなローカルシミュレータについては図9及び図10を用いて説明することにする。本発明の1つの実施形態、いわゆる「署名」方法の実施形態においては、制御システムからの署名の取得が船舶シミュレーションの形態を成すフィードバックを必要としない場合があるため、ローカルシミュレータが不要になる場合さえある。
* 通信ライン(6)は、センサ信号(7’)の形態を成す船舶モデル(4’)の新たなシミュレート状態を制御システム(2)へ送り戻すため、また、制御信号(13)の実際の実センサデータ及び/又はシミュレートセンサデータ(7、7’)又は実際の実コマンド信号及び/又はシミュレートコマンド信号(9、9’)に基づいて制御システム(2)で連続的に計算して、所望の位置、進路、速度等の形態を成す実コマンド信号及び/又はシミュレートコマンド信号(9、9’)のうちの少なくとも1つを得るために設けられてもよい。
* 通信ライン(6)は、制御信号(13)の形態を成す制御システム(2)の応答を制御信号(13’)として遠隔検査室(40)へ送るために設けられてもよいが、結果として得られる制御信号(13’)を船上のローカルシミュレータへ送ってもよい。
【0026】
制御信号(13)は、1つ又はそれ以上のプロペラ(16)又はスラスタ(17)におけるシャフト速度(13a、13b)や、方向舵(18)又はスラスタ(17)及び可能であればバラストポンプやクレーン等の他のアクチュエータにおける回転角度(13c)の形態を成す信号(13a、13b、13c)を含む。
【0027】
センサ(8)は、多数の異なる装置から選択される1つ又はそれ以上の装置を備えていてもよい。上記多数の異なる装置のうちの幾つかを以下に示す。
− 船舶位置(7a)を決定するためのGPS受信器(8a)、水中音響位置センサ(8h)、積算加速度センサなどの位置測定装置(8a)
− 船舶進路(7b)を決定するための進路測定装置(8b)、例えばジャイロコンパス又は幾つかの他のコンパス
− 速度(7c)を決定するための速度センサ(8c)又は単一積算加速度センサ
− (相対)風速(7d)及び風向(7e)を表示するための風速計(8d、8e)
− ロール角度(7f)を表示するためのロール角度センサ(8f)
− ピッチ角度(7g)を表示するためのピッチ角度センサ(8g)
【0028】
本発明の好ましい実施形態において、システムには、1つ又はそれ以上のセンサ信号(7)を制御システム(2)への信号ライン(12)から切り離すスイッチ(15a)が設けられている。また、本発明に係るシステムには、1つ又はそれ以上のコマンド信号(10)を制御システム(2)への信号ライン(11)から切り離す第2のスイッチ(15b)を設けることができるとともに、1つ又はそれ以上の制御信号(13)を制御システムからの信号ライン(14)から切り離す第3のスイッチ(15c)を設けることもできる。このようにすれば、スイッチ(15)を使用して、船舶の残りの部分への信号及び残りの部分からの信号から制御システム(2)を完全に或いは部分的に分離させることができる。勿論、制御システム(2)は、船上の電源装置に接続されたままでなければならない。
【0029】
システムの通常の状態では、アクチュエータ(3)への制御信号(13)を計算するため、船舶の動的パラメータ(5)は、制御システム(2)のアルゴリズム(31)内に入ることができる。
【0030】
システムは、制御システム(2)からの制御信号(13、13’)及び完全に或いは部分的にシミュレート測定値(7、7’)によって表わされる初期状態に基づいて船舶の状態をシミュレートするアルゴリズム(32)を有するシミュレータ(30R)が遠隔検査室(40)に設けられるように構成されていてもよいが、通信遅延問題を回避するために同等のシミュレータ(30L)が船上に局所的に配置されていてもよい。
【0031】
通信ライン(6)は、1つ又はそれ以上のシミュレートセンサ信号(7’)を遠隔検査室(40)から送信するようになっていてもよく、また、遠隔検査室(40)側の第1のリアルタイムインタフェース(6a)に接続されるとともに、第1のリアルタイムインタフェース(6a)から切断される。同様に、通信ライン(6)は、船舶(4)側の第2のリアルタイムインタフェース(6b)に接続されるとともに、第2のリアルタイムインタフェース(6b)から切断される。第2のリアルタイムインタフェース(6b)は、制御システム(2)への信号ライン(11)に対してスイッチ(15a)により接続される。本発明の好ましい実施形態において、通信インタフェース(6b)は、図9に示され且つ図4cにも示されるように、ローカル船舶シミュレータコンピュータ(30L)により上記スイッチ(15a)に対して接続される。
【0032】
検査システムは、上記遠隔検査室(40)内の遠隔配置されたシミュレータコンピュータ(30R)を使用して、上記シミュレートセンサ信号(7’)及び上記シミュレートコマンド信号(9’)を上記通信ライン(6)を介して上記船舶側の上記ローカルシミュレータ(30L)に対して送信すること、及び、上記ローカルシミュレータコンピュータ(30L)から上記制御信号(13’)を上記通信ライン(6)を介して受信することを含み得る。
【0033】
また、検査システムは、上記遠隔検査室(40)内の遠隔配置された検査マネージャ(33)を使用して、上記シミュレート状態(50’)の初期値と、上記シミュレートコマンド信号(9’)の時間系列と、海の状態、潮流、風速、風向におけるシミュレート値とを上記通信ライン(6)を介して上記船舶側の上記ローカルシミュレータ(30L)に対して送信すること、及び、上記ローカルシミュレータコンピュータ(30L)から上記制御信号(13’)を上記通信ライン(6)を介して受信することを含み得る。この場合、上記ローカルシミュレータ(30L)が上記制御システム(2)に接続され、これにより、上記制御システムは、上記ローカルシミュレータ(30L)から上記シミュレートセンサ信号(9’)及び上記シミュレートコマンド信号(9’)を取得するとともに、上記制御信号(13’)をローカルシミュレータ(30L)に対して出力する。
【0034】
遠隔検査室(40)からリアルタイムインタフェース(6a)及び通信ライン(6)及びリアルタイムインタフェース(6b)を介して制御システム(2)に対してシミュレートコマンド信号(9’)を送信するために、シミュレートコマンド入力装置(10’)が遠隔的に配置されてもよい。本発明の好ましい実施形態において、シミュレートコマンド入力装置又は検査コマンド入力装置(10’、43)は、シミュレートコマンド信号(9’)を生成して制御システム(2)に対して直接に送信するため、船上に局所的に配置されてもよい。署名応答取得のために使用される本発明の好ましい実施形態において、シミュレートコマンド信号(9’)は、後述するようにシミュレートセンサ信号(7’)及びシミュレートコマンド信号(9’)を含む検査シリーズ(T0)中に組み込まれてもよい。上記人工測定値(7’)又は人工コマンド(9’)を制御システム(2)に対して供給するため、検査される船舶(4)もしくはその近傍にローカル検査信号源(41L)が局所的に配置されてもよい。
【0035】
制御システム(2)からの応答(S0)を所定の人工測定値信号シーケンス(T0)の状態で記録するために制御信号ロガー(42)が使用される。また、この制御信号ロガー(42)は、上記所定のシーケンス(T0)又は言うまでも無く、実際のもの或いは人工のものである他の測定値シーケンス(T1、T2、T3、……)に対するその後の応答(S1、S2、S3、……)を記録するために使用されてもよい。上記制御システム署名応答(S0)を規定するために使用される検査シーケンス(T0)を記憶するため、及び/又は、その後の検査シーケンス(T1、T2、T3、……)を記憶するために、メモリ(44)が検査信号源(41R/41L)に対して接続されてもよい。
【0036】
システムは、制御システム(2)内のアルゴリズム(31)の全て又は一部を、遠隔検査室(40)から局所的に或いは通信ライン(6)を介して変更でき、較正でき、或いは置き換えることができるようになっていてもよい。本発明において、船及び/又は検査室は、測定値(7、7’)に対する制御システム(2)からの応答(13’、19’)を記録するためのデータロガー(15)を有する。
【0037】
1.2 制御システムの検査方法の説明
前述したシステムは、船舶(4)内の制御システム(2)の検査方法で使用され得る。制御システム(2)は、1つ又はそれ以上のアクチュエータ(3)に対する制御信号(13)を用いた船舶(4)の制御及び監視を含む。
【0038】
制御システムを検査するための方法は、以下のステップを含み得る:
− 制御システム(2)への第1のセンサ信号ライン(12)を介して1つ又はそれ以上のセンサ(8)から制御システム(2)へとセンサ信号(7)をリアルタイムで取得する。
− 制御システム(2)への第2の信号ラインすなわちコマンド信号ライン(11)を介してコマンド入力装置(10)から制御システム(2)へとコマンド信号(9)を取得する。
− 1つ又はそれ以上の取得されたセンサ信号(7)及びコマンド信号(9)並びに可能であれば船舶の動的パラメータ(5)に基づいて制御システム(2)内の制御アルゴリズム(31)で計算するとともに、制御信号(13)を第3の信号ライン(14)を介してアクチュエータ(3)へ送信する。
− 1つ又はそれ以上のセンサ(8)からの1つ又はそれ以上のセンサ信号(7)を切り離し、或いは、コマンド入力装置(10)からのコマンド信号(9)を切り離すことにより、選択されたセンサ信号(7)又はコマンド入力(9)が制御システム(2)に到達しないようにすると同時に、1つ又はそれ以上の切り離されたセンサ信号(7)又はコマンド信号(9)を、遠隔検査室(40)側で船舶(4)に関して生成された対応するシミュレートセンサ信号(7’)又はコマンド信号(9’)と交換する。シミュレート信号(7’、9’)は、通信ライン(6)を介して、1つ又はそれ以上の信号ライン(12、14)により、遠隔検査室から制御システム(2)へと送られる。
− 制御信号(13、13’)の計算は、制御システム(2)において、実際のセンサ信号及び/又はシミュレートセンサ信号(7a又は7a’、7b又は7b’、7c又は7c’、……)或いはコマンド信号(9a又は9a’、9b又は9b’、9c又は9c’、……)に基づき通常の方法で継続する。
− その後、制御システムによって生成される制御信号(13’)を通信ライン(6)を介して遠隔検査室(40)へ送信することができる。
【0039】
方法の好ましい実施形態において、方法は、その後、検査室(40)内の遠隔シミュレータ(30R)又はローカルシミュレータ(30L)において、制御信号(13’)に基づき船舶モデル(4’)の新たな動的状態をアルゴリズム(32)によってシミュレートすることを含む。このようにすると、船舶が世界中のどこに配置されているかに関係なく、船舶における遠隔検査室(40)から制御システム(2)に関する検査を行なうことができる。船又はその近傍でシミュレーションが局所的に生じない場合には、シミュレーションアルゴリズムは、通信ライン(6)の使用によって引き起こされる時間遅延を考慮しなければならない。時間遅延エラーを避けるため、遠隔コンピュータ(30R)は、図9に示されるように、シミュレーションのために使用されるデータ(7’、9’)を通信ライン(6)を介して船舶のローカルシミュレーションコンピュータ(30L)へ送信してもよい。遠隔コンピュータ(30R)は、実際のセンサ信号及びコマンド信号(7、9)の切り離しを開始し、これらの信号を人工のセンサ信号及びコマンド信号(7’、9’)と交換して制御システム(2)へ送るようにローカルコンピュータ(30L)に対して命令し、また同様に、実際の出力制御信号(13)を検査出力(13’)と共に切り離してこれらを局所的に記憶し、前述したように船舶モデル(4’)の動的な動きをシミュレートするためのシミュレーションアルゴリズム(32)の検査出力(13’)オンラインを使用するとともに、検査出力(13’)を遠隔検査室(40)の遠隔配置されたコンピュータ(30R)へ送り戻すようにローカルコンピュータ(30L)に対して命令する。検査出力(13’)は、オンライン態様で遠隔検査室へ送信される必要はなく、検査が行なわれている最中又は検査後に1つ又はそれ以上のバッチ状態で遠隔検査室に戻されてもよい。その後、検査出力(13’)は、遠隔検査室(40)において記録されて解析されてもよい。
【0040】
前述した方法においては、制御システムの検査に関与する遠隔検査室(40)を陸上に配置することができ、また、検査される船舶(4a、4b、4c、……)は、検査室から遠く離れた距離、一般的には1〜20000kmの距離に配置される。この場合、検査される船舶(4a、4b、4c、……)は、近くの港、遠く離れ港、ドック又は構内に停泊して位置され或いは外洋に位置されてもよい。
【0041】
制御システムの検査が完了すると、船舶と遠隔検査室との間の通信が切断され、船舶における制御システムの通常の動作のため、制御システムに対する通常のセンサ信号及び通常のコマンド信号が再接続されるとともに、制御システムからの制御信号がアクチュエータに対して再接続される。
【0042】
本発明の好ましい実施形態において、センサ信号(7)は、センサ(8)からの以下の1つ又はそれ以上のセンサパラメータを含む:
− GPS受信器(8a)、水中音響位置センサ(8h)、積算加速度センサなどの位置センサ(8a)からの船舶位置(7a)
− 進路センサ(8b)、例えばジャイロコンパス又は他のコンパスからの進路(7b)
− 速度センサ(8c)又は単一積算加速度センサからの速度(7c)
− 風速計(8d、8e)からの風速(7d)及び風向(7e)
− ロールセンサ(8f)からのロール角度センサ(7f)
− ピッチセンサ(8g)からのピッチ角度センサ(7g)
【0043】
本発明の好ましい実施形態においては、1つ又はそれ以上の所望の位置(9a)、進路(9b)、速度(9c)を得るため、制御信号(13)は、1つ又はそれ以上のプロペラ(16)又はスラスタ(17)のシャフト速度や、方向舵(13c)又はスラスタ(17)及び可能であれば他の制御装置における角度の形態を成す信号(13a、13b、13c)を含む。
【0044】
方法は、1つ又はそれ以上のプロペラ(16a、16b、16c、……)への制御信号を計算するために使用することができ、また、制御装置(18)は、1つ又はそれ以上の方向舵(18a、18b、18c)を含んでいてもよく、1つ又はそれ以上のスラスタ(17)を含み得る。
【0045】
コマンド入力装置(10)は、1つ又はそれ以上の以下のアイテム、すなわち、位置指定装置(10a)、ステアリングホイール(10b)、速度指定装置(10c)、或いは、所望の傾き角度、ピッチ角度、縦揺れ補償などを指定するための装置(10x)を含み、これらの装置は、所望の位置(9a)、所望の進路(9b)、所望の速度(9c)又は他の所望の状態(9x)、例えば所望のロール角度、所望のピッチ角度、所望の縦揺れ補償等のうちの1つ又はそれ以上のコマンド信号(9)を与える。
【0046】
本発明の好ましい実施形態において、方法は、検査におけるシミュレートセンサ信号(7’)及び残っていればその残りの実際のセンサ信号(7)、シミュレートコマンド信号(9’)及び残っていればその残りの実コマンド信号(9)に基づいて制御システム(2)が許容できる応答(S)をもたらす制御信号(13、13’)を与え、それにより、検査に基づいて制御システム(2)が認証されることを検証するために遠隔検査室(40)が使用されることを含み得る。
【0047】
船舶の動的パラメータ(5)としては、後述するように、質量(m)、軸方向慣性モーメント、船舶の質量分布、船体の幾何学的形状を表わす船体パラメータを挙げることができる。センサ(8)からのセンサ信号(7)の制御システム(2)に対する切り離しは、信号ライン(12)上のスイッチ(15a)によって行なうことができる。コマンド入力装置(10)からのコマンド信号(9)の制御システム(2)に対する切り離しは、信号ライン(11)上のスイッチ(15b)によって行なうことができる。
【0048】
故障状況は、その時点で1つ又はそれ以上の選択されたセンサ信号(7)又はコマンド信号(9)を切り離して部品の故障をシミュレートすることにより検査することができ、また、この場合、制御信号(13、13’)及び状態信号(19、19’)の形態を成す制御システム(2)の応答は、局所的に或いは検査室(40)においてロガー(15)に記録される。しかしながら、そのような検査は、煩雑であるとともに、その後の検証機会において繰り返すことが困難である。
【0049】
また、故障状況は、測定値を変えることにより、或いは、選択されたセンサ信号(7’)に乱れを形成することにより、或いは、測定値(7’)に対して天候、風、電気的ノイズ、大気雑音又は音響雑音のような外的な乱れを形成することにより検査することもできる。そのような乱れは、遠隔検査室(40)から船舶(4)の制御システム(2)へと送られてもよく、また、この場合、制御信号(13、13’)及び状態信号(19、19’)の形態を成す制御システム(2)の応答は、検査室(40)内のロガー(15)に記録される。
【0050】
本発明に係る方法の好ましい実施形態においては、船舶(4)の制御システム(2)のための新たなソフトウェアを検査室(40)から通信ライン(6)を介して送信することができる。
【0051】
制御システム(2)の検査及び検査結果に基づいて検査室(40)が制御システム(2)を認可できる本発明に係る方法の実行後、検査室(40)は、船舶(4)の通常の動作における使用に関して制御システム(2)を認証することができる。
【0052】
本発明に係る提案された遠隔検査の利点の1つは、シミュレートされた不具合状況下及びシミュレートされた広大な範囲の天候負荷下におけるソフトウェア及び制御システム(2)の全体の検査の自由度(柔軟性)が、従来の検査及び認証下における場合よりも非常に高いという点である。同時に、以前に使用された船舶制御システムの検査方法の欠点及び限界、すなわち、航行距離、時間がかかる航行、高コストな航行、検査のために機器を準備する時間などの欠点及び限界が回避される。提案された発明を用いると、少数のオペレータにより以前よりもかなり多くの船舶を検査して認証することができる。また、自動的な検査の実行により検査の再現性が高まるため、検査の質が向上する。
【0053】
1.3 掘削船舶における制御システムの検査の実施例
本発明は、前述した制御システムが実際に安全で且つ確実な方法で機能するかどうかを検査するために使用することができる。これについては、以下の実施例を想像してもよい。すなわち、図7に示されるように、掘削船(4)内の制御システム(2)を検査することが望ましい。動的に位置されるシミュレート掘削を用いた検査下にある位置の誤りが否定的結果を有さないように、掘削は検査前に終了される。掘削船(4)は、図4a、図4b、図4cに示されるものに対応し且つ図示のように同じ方法でリアルタイムインタフェース(6b)と通信ライン(6)とリアルタイムインタフェース(6a)とを介して遠隔検査室(4)に接続される制御システム(2)を有する。制御システム(2)は、プロペラ(16a、16b、16c、……)又はスラスタ(17)のような推進装置(16)及び方向舵(18)、トンネルスラスタ及びアジマススラスタの形態を成すスラスタ(17)のような制御装置(18)を有する掘削船(4)の制御及び監視を含む。スラスタ(17)は、推進装置(16)及び制御装置(18)の両方の機能を果たすことができる。シミュレート掘削下では、掘削船(4)は、想定される位置のずれが最も小さい固定位置(9a)にあり、また、風、波、潮流に対するその影響という形で天候を補償するにすぎない進路(7b)及び速度(7c)を伴っていることが望ましい。公知の方法と一致する動的位置決め方法は、連続的に実行できる以下のステップを含み得る:
* 制御システム(2)は、1つ又はそれ以上のセンサパラメータからセンサデータ(7)をリアルタイムで取得する。例えば、測定された船舶の位置(7a)をDGPS受信器等の位置センサ(8a)から取得し、進路(7b)をジャイロコンパス等のような進路センサ(8b)から取得する。
* 制御システム(2)は、図7に示される1つ又はそれ以上の所望の位置(9a)、方向舵又はスラスタにおける角度の形態を成す所望の進路(9b)、プロペラ(16)及びスラスタ(17)におけるシャフト速度の形態を成す所望の速度(9c)のためのコマンド信号を与える少なくとも1つの位置指定装置(10a)、ホイール(10b)、速度指定装置(10c)を含むコマンド入力装置(10)、例えばいわゆるジョイスティックパネルからコマンド信号(9)を取得する。
* センサ(8)は、センサ信号(7)を第1のセンサ信号ライン(12)を介して制御システム(2)へ送信する。
* コマンド入力装置(10)は、コマンド信号(9)を第2の信号ラインすなわちコマンド信号ライン(11)を介して制御システム(2)へ送る。
* その後、制御システム(2)は、取得された1つ又はそれ以上のセンサ信号(7a、7b、7c、……)及びコマンド信号(9a、9b、9c、……)、可能であれば船舶(4)における質量(m)及び軸方向慣性モーメント(M1、M2、……)のような必要とされる動的パラメータの組に基づいて、また、プロペラ(16)における所要シャフト速度(13a)、方向舵(18)及び可能であれば1つ又はそれ以上の所望の位置(9a)、進路(9b)、速度(9c)等を維持し且つ回復させるための他の制御装置における角度(13c)に基づいて、連続的に計算する。
* その後、制御システム(2)は、プロペラ(16)及び/又はスラスタ(17)におけるシャフト速度(13a)及び方向舵(18)及び/又はスラスタ(17)における角度(13c)を制御するために、所要シャフト速度(13b)を含む制御信号(13a、13b、13c、……)を制御システム(2)から第3の信号ライン(14)を介して送る。
* 信号ライン(12)上のスイッチ(15a)により、1つ又はそれ以上のセンサ(8)からの1つ又はそれ以上のセンサ信号(7)が制御システム(2)から切り離され、及び/又は、信号ライン(11)上のスイッチ(15b)により、制御入力装置(10)からの1つ又はそれ以上のコマンド信号(9)が制御システム(2)から切り離される。
* 1つ又はそれ以上の切り離されたセンサ信号(9)、例えば測定された位置(7a)又は進路(7b)、或いは、1つ又はそれ以上の切り離されたコマンド信号(9)、例えば所望の位置(9a)又は所望の進路(9b)は、1つ又はそれ以上の信号ライン(12、14)を形成することにより、対応するシミュレートセンサ信号(7’)、例えばシミュレート測定位置(7a’)又はシミュレート測定進路(7b’)、或いは、対応するシミュレートコマンド信号(9’)、例えばシミュレート所望位置(9a’)又はシミュレート所望進路(9b’)に取って代えられる。ここで、シミュレートセンサ信号及びシミュレートコマンド信号(7、9)は、船舶(4)に関して遠隔検査室(40)で生成されるとともに、通信ライン(6)を介して一方又は両方のスイッチ(15a、15b)により1つ又はそれ以上の信号ライン(12、14)へと送られる。この場合、DGPS受信器(8a)からセンサ信号(7a)を形成してもよく、また、これらの信号を、船舶(4)が実際に存在している位置(9a)から所定距離だけ離れている間違った逸脱した新たな位置と置き換えてもよい。
* その後、制御システム(2)は、入力及び/又はシミュレートセンサ信号(7a又は7a’、7b又は7b’、7c又は7c’、……)及びコマンド信号又はシミュレートコマンド信号(9a又は9a’、9b又は9b’、9c又は9c’、……)並びに所要船舶パラメータ(5)に基づいて、プロペラ(16)における所要シャフト速度(13b)、及び、方向舵(18)並びに所望位置、進路、速度等のうちの少なくとも1つを得るための他の制御装置における角度(13c)を順次に連続して計算する。計算された応答、すなわち、例えばプロペラ(16)の制御のための制御信号(13a)や方向舵(18)の角度(13c)のような、制御システム(2)からアクチュエータ(3)へのいわゆる制御信号(13)は第3のスイッチ(15c)によって切り離し又は隠すことができ、それにより、制御信号(13)は、検査中にプロペラ(16)又は方向舵(18)を制御しないが、その代わり、通信ライン(6)を介して遠隔検査室(40)に送られる。
【0054】
その後、制御システム(2)は、「ブラックボックス」(2)と見なされてもよい。この場合、「ブラックボックス」(2)への少なくとも1つのセンサ信号(7)の変化がシミュレートされるとともに、「ブラックボックス」(2)が制御信号(13)に応答する。はじめに述べた掘削船(4)のケースでは、DGPS信号にエラーが存在した場合には、制御システムが5分間にわたって断固として誤っているとしてきたのに突然に正しいと見なす新たな位置へ船舶を移動させるために、制御システム(2)が船舶(4)のプロペラ、スラスタ及び方向舵を突然に制御しようとする事態が5分後に起こる。
【0055】
1.4 船舶の動き及びこの動きのシミュレーション
船舶(4)の動きは、図5に示されるように、大波の時、揺れている時、船首揺れ(ヨー)している時の船の速度に置き換えて、質量中心の位置によって、また、ロール角、ピッチ角、ヨー角によって表わされる。船舶の動きを独自に表わすこれらの一連の変数(速度、位置、回転角度など)は、船舶の状態(50)であると言われる。船舶は、船舶の動きに影響を与える力やモーメントに晒される。これらの力及びモーメントは、風、潮流、波からの刺激、プロペラ(16)、スラスタ(17)、方向舵(18)のようなアクチュエータ(3)の使用による刺激、ロール角やピッチ角及び縦揺れの位置に起因するバネ力作用に対応する静水力からの刺激、船舶(4)の速度及び加速度に関連する流体力からの刺激によるものである。船舶(4)に作用する力及びモーメントは、状態(50)によって与えられる船舶の動きによって決まる。これに対し、船舶の動きは、船舶に作用する力及びモーメントの結果と見なすことができる。船舶や船の場合、船体の幾何学的形状、質量、質量分布は知られている。また、船の流体力学的パラメータも知られている。船舶の動きが状態(50)に関して与えられると、船に作用する力やモーメントを例えばアルゴリズム(32)の使用によりシミュレータ(30)で計算することができる。シミュレータ(32)において、シミュレート船舶(4’)のシミュレート状態(50’)は、以下に示される手続きで計算される。そして、シミュレート船舶(4’)の加速度及び角加速度は、ニュートンの法則及びオイラーの法則から求められる船舶における運動方程式によって計算されてもよい。そのような運動方程式は教科書に記載されている。運動方程式には以下のパラメータが現れる:
− 船舶の質量
− 質量中心(重心)の位置
− 浮心の位置
− 船舶の慣性モーメント
− 長さ、ビーム、ドラフトを含む船体の幾何学的形状
− 流体力学的付加質量
− 流体力学的な起こり得る減衰
− 粘性減衰
− 縦揺れ、ピッチ、ロール時の動きに起因する船体の復元力及びモーメントに関連するパラメータ
− 波成分の振幅、周波数、方向を、結果として船体に作用する力及びモーメントに関連付けるパラメータ
− 更に、運動方程式は、プロペラ速度及びピッチに応じたプロペラ(16)からのアクチュエータ力、方向舵角度及び船舶速度に応じた方向舵(18)からの力、スラスタ速度及び方向に応じたスラスタ(17)からの力に関する数学的モデルを含む。
【0056】
以下の手続きは、u0〜uNの時間間隔にわたって状態(50、50’)により与えられる船舶(4、4’)の動きを計算するために使用することができる。すなわち、最初の時刻u0において船舶の動きが状態(50’)に関して与えられると仮定すると、この時刻において力及びモーメントが計算される。その結果、船舶(4、4’)における運動方程式から、時間u0における船舶の加速度及び角加速度を計算することができる。その後、数値積分アルゴリズムを使用して、時間u1=u0+hにおいて状態(50、50’)により与えられる船舶の動きを計算することができる。ここで、hは積分アルゴリズムの時間ステップである。船舶において、時間ステップhは一般に0.1〜1sの範囲内にある。時間u1における船舶(4、4’)の動き(50、50’)が計算されると、時間u1における力及びモーメントを計算できるとともに、u1における加速度及び角加速度が運動方程式から求められる。この場合も先と同様に、数値積分を使用して、時間u2=u1+hにおける船舶の動き(50、50’)が計算される。この手続きは、時間uNに達するまで、各時刻uk=u0+h×kにおいて繰り返すことができる。
【0057】
船舶に作用する波は、波成分の和として表わされる。この場合、1つの波成分は、所定の周波数、振幅、方向を有する正弦波の長いクレスト状の波である。海の所定の場所において、波成分の振幅及び周波数の広く行渡った分布は、JONSWAPスペクトル又はITTCスペクトルのような公知の波スペクトルによって与えられる。この場合、波スペクトルの強度は、重大な波高に関してパラメータ化される。結果として船舶に作用する力及びモーメントは、波の振幅、周波数、方向の関数であるとともに、船舶の速度及び進路の関数である。風からの力及びモーメントは、風速、風向、船舶速度、風向に対する船舶の進路の関数としての海面上における船の投影面積によって与えられる。潮流からの力及びモーメントは、潮流速度、潮流方向、海面下における船体の投影面積によって、また、潮流方向に対する船舶の速度及び進路によって与えられる。
【0058】
1−5 動的位置決め−DP:
動的位置決め、いわゆるDPにおいて、船舶(4)は、3つの自由度(DOF)で制御される。x、yの進路における所望の位置は、制御パネル(10)上のキーボード、ローラボール、マウス、又はジョイスティックを使用するオペレータからの入力として与えられる。制御システム(2)は、船舶が所望の位置及び進路を達成するように、縦揺れ方向及び揺れ方向の所要のアクチュエータ力、及び、ヨー軸周りのアクチュエータモーメントを計算するために使用される。また、制御システム(2)は、命令されたアクチュエータ力及びモーメントに対応するプロペラ力、方向舵力、スラスタ力の計算を伴うアクチュエータ割り当ても含む。制御システム(2)は、船舶(4)上のコンピュータのアルゴリズム(31)を実行することにより実施される。このアルゴリズム(31)は、所望の位置(9a)及び進路(9b)と測定された位置及び進路(7a、7b)とを比較し、また、これに基づいて、アルゴリズムは、制御理論を使用し且つ教科書に見られる必要なアクチュエータ力及びモーメントを計算する。また、アルゴリズムは、プロペラ力、方向舵力、スラスタ力が計算される割り当てモジュールを含む。位置及び進路は、DGPSセンサ、ジャイロコンパス、トランスポンダが海底に配置された水中音響センサシステム、海底上に固定された1本のピンと張ったワイヤ(トートワイヤ)の表示が測定される複数のピンと張ったワイヤによって測定される。
【0059】
1−6 船舶の制御システムの検査
例えばDPシステムなどの海洋制御システムの様々な故障は、特定の故障状況を引き起こす状態と共に記録されてきた。この一例として、GPS受信器の75mの突然の安定したエラーは、DP制御下において、掘削船におけるいわゆるドライブオフの形で、重大な故障状況を引き起こしてきた。この場合、船舶が突然に所望の位置から離れ、また、ライザの切り離し及びドリルストリングの切断といった緊急処置が実行されなければならなかった。他の例は、縦揺れ補償における加速度測定信号の突然の損失である。この場合、システムは、船舶の縦揺れ動作の正確な補償を与えることができず、また、海底の特定の場所に負荷を設置する最中に、或いは、船舶と海底を貫通する井戸との間に回転ドリルストリングが配置された掘削ライザの縦揺れ補償において、負荷が波領域又は海底の近傍にある場合には、困難な状況が生じる可能性がある。
【0060】
船舶の場所、速度又は進路、実際の天候、実際の海況、1つ又はそれ以上のセンサ信号における一連のエラー、以前に結果が記録された故障状況になった一連のコマンド入力信号、が組み合わされた形の状況を考える。そのような状況は、検査される制御システムが結果的に制御システム故障となることなく状況を処理できるかどうかを確かめるために検査目的で再現されてもよい。
【0061】
本発明の一実施形態に係る提案された手法は、シミュレートセンサ信号(7a’、7b’、……)及びシミュレートコマンド入力信号(9a’、9b’、……)の形態を成す入力を用いて制御システムを実行することにより所定の船舶における制御システム(2)を検査することであり、また、その場合、制御信号(13a、13b、……)の形態を成す制御システム(2)の出力は、シミュレート船舶モデル(30)への制御信号として使用される。制御システムのための検査シナリオは、所定の船舶の検査が行なわれるべき一連のテストケースの形で作られる。各テストケースは、特定の海況、特定の風速(7d’)、及び風向(7d’)、特定の水流速度(7k)及び潮流方向(7l)、所定の一連のコマンド入力信号(9a’、9b’、9c’、……)によって与えられる。また、各テストケースは、シミュレートセンサ信号(7a’、7b’、7c’、……)に対して加えられる一連の所定のエラー、例えば、1つ又はそれ以上のDGPS受信器における75mの更なるステップ変化(図4a3参照)、すなわち、所謂ワイルドポイント(w)を伴っていてもよい。この場合、位置信号は、0から50mへと突然に変化してその直後に0へ戻る更なるエラー、1つ又はそれ以上のGPS受信器における1m/sの安定したドリフトの形態を成すエラー、DGPS受信器(8a)又は水中音響位置センサなどの1つ又はそれ以上の位置センサにおける2mの急激な変動の形態を成すエラー(図4a4参照)、又は、1つ又はそれ以上のセンサ信号の損失(図4a2参照)を有する。そのようなテストケースを特定するために、前に記録された故障状況における既知の状態が使用されてもよい。
【0062】
一連の検査における各テストケースにおいては、入力センサ信号、入力コマンド信号、結果として生じる制御信号が記録され、また、記録された検査データの解析に基づいて、制御システムが検査において満足に機能したかどうかが決定されるとともに、これに基づいて、制御システムが認可され或いは認可されなくてもよく、また、可能であれば、これに基づいて制御システムが認証されてもよい。
【0063】
2−1 制御システムの署名の取得
序文
例えばDet Norske Veritasなどの分類会社によって検査されて認可された制御システム(2)を考える。この検査及び分類は幾つかの時点で行なわれてもよく、これについては図8を参照されたい:
* 制御システムは、制御システム製造場所での工場承認検査(FAT)時に、シミュレータに対する制御システム(2)の接続に関する検査後直ぐに認証されてもよい。
* その後、制御システムは、造船所(構内)での船舶の試運転時にほぼ最後の構成中で再検査されてもよい。
* 制御システムは、船舶が動作に入っているとき、顧客承認検査(CAT)の直後に認可されて承認される間、本発明の一実施形態に従って検査されてもよい。
* 年次検査又は3年次検査が分類会社又は保険会社による基準要件であってもよい。
* 本発明に係る検査では、制御システムの一部又は全体の再プログラミング後、センサの交換又は修理後、新たなセンサの設置後、制御システム入力に直接に関連するコマンドコンソール等の交換又は修理の後に、連続的な制御システムの調子をチェックすることが必要とされてもよい。そのような変更後、変更前に認められた制御システムの認可又は認証はもはや無効でなければならない。
* 船舶の修理変更、例えば大きな或いは新たなクレーンの搭載、船体の変更又は引き延ばし、掘削又は製造ライザのための縦揺れ補償システム又は掘削やぐらの変更などは、制御システムの再構成を含んでいてもよく、また、再認証のための制御システムの検査をもたらさなければならない。
【0064】
2−2 制御システム署名の確立の概要
認可又は認証後に想定され得る変更が実際に制御システム(2)に対して行なわれたかどかを明らかにするために、検査が完了して船が認可された後に制御システム出力基準「署名」S0を確立するとともに、その後のシステムの検査と比較するために上記署名S0を記憶することが提案される。以下、この方法について詳細に説明する。
【0065】
署名S0は、実際のセンサ信号(7a、7b、7c、……)及び実入力コマンド信号(9a、9b、9c、……)の代わりに好ましくは1つ又はそれ以上の人工センサ信号(7a’、7b’、……)及び制御システム(2)に対する入力として使用するための入力コマンド信号(9a’、9b’、……)から成る所定のシーケンスT0を生成することにより、また、結果として得られる制御システム(2)からの出力を、この場合には好ましくはアクチュエータ(17、18、19)へ送られてもよい制御信号(13a、13b、13c、……)の形態を成す署名(S0)として記録することにより、本発明の好ましい実施形態に従って確立される。好ましい実施形態において、この当初の署名(S0)は、このとき、制御信号の完全な時間区分履歴である。
【0066】
(その後の検査)
制御システム(2)が変更されたかどうかを検査するために、幾つかのその後の時間(t1、t2、t3、……)において同じ入力シーケンスT0が制御システム(2)に対して入力されるとともに、その結果として得られる制御信号(13a、13b、13c、……)の形態を成す出力が新たなシステム応答すなわち「署名」(S1、S2、S3、……)として記録される。上記制御システム(2)が交換されたか或いは変更されたかどうかを決定するためには、当初の署名(S0)と新たな署名(S1、S2、S3、……)との間で比較が行なわれなければならない。
【0067】
2.3 制御システム署名の確立の詳細
更に詳細には、本発明の好ましい実施形態は、船舶(4)の制御システム(2)を検証するための方法を含む。上記制御システム(2)は、その動作状態において、センサ(8)からのセンサ信号(7)及び1つ又はそれ以上のコマンド入力装置(10)からのコマンド信号(9)を受信する。制御システム(2)は、上記測定値(7)及びコマンド信号(9)に対する応答として、制御信号(13)を上記船舶のアクチュエータ(3)に対して供給することにより、上記船舶(4)の所望の位置、速度、進路又は他の状態変数を維持する。
方法は、次のステップによって特徴付けられる。
* 第1の時間(t0)中に、上記制御システム(2)に対する1つ又はそれ以上の実際のセンサ信号(7a、7b、7c、……)の受信を切り離して、上記実際のセンサ信号のうちの上記1つ又はそれ以上を、検査信号源(41)から上記制御システム(2)への1つ又はそれ以上の人工の測定値(7a’、7b’、7c’、……)を含む第1の検査シーケンス(T0)と置き換えるステップ
* その後、上記実際の及び/又は人工のセンサ信号(7、7’)に基づいて上記制御システム(2)を機能させて、上記第1の時間(t0)における上記第1の検査シーケンス(T0)に対する応答(S0)として上記制御システム(2)の制御信号(13)として制御信号ロガー(42)に記録される制御信号(13’)を生成するステップ
* その後、上記第1の時間(t0)において上記第1の検査シーケンス(T0)に対する上記制御システム(2)の応答(S0)を上記制御システム(2)の「署名」応答(S0)として記憶するステップ
【0068】
この方法は、その後の時間(t1、t2、t3、……)において、上記制御システム(2)に対して入力される同じ所定の検査シーケンス(T0)を使用して、上記制御システム(2)からのその後の応答(S1、S2、S3、……)を記録するとともに、上記その後の応答(S1、S2、S3、……)が上記署名応答(S0)にほぼ類似しているかどうかを決定して、上記制御システム(2)が変更されていないことを検証し、或いは、上記その後の応答(S1、S2、S3、……)が上記署名応答(S0)と大きく異なるかどうかを決定して、上記制御システム(2)が変更されたことを示すという目的を有している。
【0069】
2−4 「署名」S0との比較
その後の取得されたシステムシーケンスS1は、本発明に従って、当初のシステム応答すなわち「署名」S0と比較される。S0とS1との間に殆ど差がない場合には、システムは変更されていないと見なされ、新たな認可又は認証のための新たな検査を行なう必要がない。S0とS1との間に大きな差がある場合には、制御システムが変更されたものと判断されて、認可又は認証がもはや有効でなくなり、新たな認可/認証検査を行なわなければならない。大きな差が何であるかを決定するためには、現実的に幾つかの限界を考慮しなければならない。署名S0、S1及びその後のシステム応答は、検査シーケンスT0のように何らかのノイズ及び高周波成分を含む場合があり、そのため、所得されたシステム応答は決して完全に等しくない。以下、差を計算するための方法の概要を説明する。
【0070】
2−5 差の計算
本発明の好ましい実施形態において、以下の計算方法は、時間t0において記録された上記制御システムの当初の応答(S0)とt0後から数週間、数ヶ月又は数年程度経過したt1において記録されたその後の応答(S1)との間の差を決定するために使用されてもよい。制御信号は、当初の応答S0を確立するためにt0で開始された検査中に、或いは、応答S1を確立するために時間t1で開始された検査中に、数秒程度の間隔の時刻u1、u2、……un……、uNにおいて記録される。各時刻u1、u2、……un……、uNにおいて、制御システムは、制御チャンネル信号等(13a、13b、13c、……、13K)を含む幾つかの制御信号を出力し、これらを我々は多次元信号と呼んでもよい。時間unにおけるシーケンスS0の多次元値を、
S0(un,1,un,2,un,3,un,4,…….,un,m,……,un,k)
で示している(ここで、unにおける第1の添字nは1つの時刻を示し、第2の添字1、2、3、4、……m、……、Kは制御チャンネル信号等(13a、13b、13c、……、13m、……、13K)を示している)。同様に、時間unにおけるシーケンスS1の多次元値は、
S1(un,1,un,2,un,3,un,4,…….,un,m,……,un,k)
である。無作為な性質を有する可能性があるシーケンスS0及びS1の高周波成分を除去するため、シーケンスS0、S1はローパスフィルタリングされる。S0のフィルタ処理バージョンは、SF0と名付けられ、時間unでは、
SF0(un,1,un,2,un,3,un,4,……,un,m,……,un,k)
で示される。S1のフィルタ処理バージョンは、SF1と名付けられ、時間unでは、
SF1(un,1,un,2,un,3,un,4,……,un,m,……,un,k)
で示される。その後、S0とS1との間の差は、SF0とSF1との間の差におけるRMS値に関して特徴付けられる。これは以下のように計算されてもよい。
RMS(SF0,SF1)={[SF1((u1))−SF0((u1))]2+[SF1((u2))−SF0((u2))]2+……+[SF1((uN))−SF0((uN))]2}の平方根
(ここで、測定値SF0((u1))及びSF1((u1))のそれぞれが、一般に前述したような多次元である点を考慮しなければならない。)
【0071】
エンジンパワーコマンド出力、方向舵角度コマンド出力、スラスタ角度コマンド出力などのS0制御信号パラメータとS1制御信号パラメータとの間の差には、それらの実際の性質に従って重みが与えられなければならない。
【0072】
RMSは、2つのシーケンスSF0、SF1間の差の加重平均値と見なすことができる。RMS(S0、S1)が何らかの閾値、例えば0.01又は1%よりも大きい場合には、制御システムが変更され或は修正された可能性が大きく、認可又は認証のために新たな検査を行なわなければならない。或いは、RMS(S0、S1)が閾値よりも小さい場合には、システムが変更されていないと考えられ、認可及び/又は認証が有効であると考えることができる。比較の質を更に高めるため、S0及びS1に関連する警告及びイベントリストが定性的に解析されてもよい。
【0073】
3−1 制御システムの個々の部分のための署名の確立
署名を生成するための前述した方法は、制御システム全体のための署名を生成するために使用することができ、或いは、統合された制御システムの組へと拡張することができる。他の手法は署名の組を生成することであり、この場合、各署名は、センサの特定の組又は制御システムの特定の機能に関連する制御システムの性能に関連付けられる。その後の手続きでは、1つ又はそれ以上のセンサから成るセンサ群1から人工センサ信号(7a’、7b’、7c’、……)の所定のシーケンスTG10が生成され、また、署名SG10がセンサ群G1に関連していた場合には、その結果として得られる出力が制御信号(13a、13b、13c、……)の形態を成す署名SG10として記録される。その後、センサ群2から人工センサ信号の所定のシーケンスTG20が生成され、その結果として得られる出力がセンサ群2に関連する署名SG20として記録される。このようにして進めると、入力シーケンス(TG10、TG2、TG30、……)の連続入力及び対応する出力の記録により、規定されたセンサ群G1、G2、G3、……のための署名(S10、S20、S30、……)が確立される。センサ群G1はGPS受信器であってもよく、センサ群G2は水中音響位置センサであってもよく、センサ群G3はGPSと水中音響センサとの組み合わせ等であってもよい。
【0074】
更に、人工コマンド入力信号(9a’、9b’、……)の入力シーケンスTC10、TC20、TC30、……の組は、コマンド入力信号の異なる組み合わせC1、C2、C3、……に関してシステムを検査するために生成される。その結果として得られる出力は、制御信号(13a、13b、13c、……)の形態を成す署名SC10、SC20、SC30、……として記録される。この場合、署名SC10、SC20、SC30、……は、コマンド入力信号の組み合わせC1、C2、C3、……に関連付けられる。
【0075】
その後、前述したように、システム全体のための信号署名の場合には、その後の時間(t1、t2、t3、……)において制御システムを検査することができる。nの番号が付された検査においては、応答SG1n、SG2n、SG3n、……及びSC1n、SC2n、SC3n、……につながる入力シーケンスTG1n、TG2n、TG3n、……及びTC1n、TC2n、TC3n、……が存在する。その後、SG1n、SG2n、SG3n、……及びSC1n、SC2n、SC3n、……と署名SG10、SG20、SG30、……及びSC10、SC20、SC30、……とを比較するとともに、どの応答が当初の署名と異なるのかに注目することにより、どのセンサ群又は入力信号のどの組み合わせが署名の変化をもたらすのかを決定することができる。前述したように、SG1nがSG10と異なることが計算される場合には、制御システムが変更されてしまっており、制御システムの変化がセンサ群G1等に関連付けられる。前述したように、SC1nがSC10と異なることが計算される場合には、制御システムが変更されてしまっており、制御システムの変化が入力コマンド信号における組み合わせC1等に関連付けられる。
【図面の簡単な説明】
【0076】
【図1】制御システムを有する船舶を示す図である。制御システムは、位置、進路、速度の測定値及び他の測定値を航行機器から受けるとともに、位置指定装置、制御システムの制御パネル、速度指定装置、プロペラ又は可能であればスラスタのための速度又はシャフト速度指定装置からコマンドを受ける。また、制御システムは、相対風向及び相対風速の測定値を風速計から受けることができるとともに、海況に関する情報、すなわち、波の上昇、ロール周期、ピッチングなどを受け或いは計算することができる。制御システムは、所望の位置、進路、速度が得られるように、シャフト速度をプロペラへ連続的に出力し、角度を方向舵へ連続的に出力するように構成されている。
【図2】製造後の制御システムの工場承認検査「FAT」を示す図である。制御システムは、船舶用に形成されるが、船舶に設置されていない。制御システムは、シミュレートセンサ信号とのインタフェースに接続される。制御システムは、アクチュエータに接続されていないがアクチュエータを対象とする制御信号の形態を成す応答を与える。しかしながら、FATは、船舶の最終的な構造を反映しなくてもよい。これは、他のクレーン、他の縦揺れ補償システム、他の新たに開発されたセンサが最終的に進水されて検査される船舶と共に使用される場合があり、そのため、FATが最終的にクラス協会船舶検査認可の時点で関連しなくなる場合があるからである。
【図3】船のための公知の制御システムの一般的な構成を示す図である。関連するセンサ、コマンド入力装置、アクチュエータの全てが船の制御システムに接続されている。
【図4a1】離れたシミュレーション位置にある船舶シミュレータをロガーと共に示す図である。両方とも、シミュレーション位置にある第1のリアルタイムインタフェースを介して、また、リアルタイム制御、シミュレーション、記録のための1つ又はそれ以上の通信チャンネルを用いて、例えば少なくとも1つの船舶上の制御・監視システムなどの制御システムに更に接続されるリアルタイム制御、シミュレーション、記録のための1つ又はそれ以上のリアルタイムインタフェースに対して接続されている。シミュレーション位置は、例えばDet Norske Veritas, American Bureau of Shipping,Germanischer Lloyd,Lloyd's Registerのような陸上のいわゆるクラス協会又は他のクラス協会の実験室にあってもよい。或いは、信号転送遅延或いはコンピュータ通信の遅延に起因する想定され得るエラー、又は、距離に起因する電磁気伝播遅延に伴うエラーを防止するため、シミュレータ装置は、検査される船上に配置されてもよい。
【図4a2】例えば位置、進路、速度、風向などの人工測定値の検査シーケンスT0を図の左側に示し、この検査シーケンスT0から結果として得られる制御システムからの応答S0を図の右側に示している図である。検査シーケンスS0の人工測定値は、この図では、関連するが最も粗い近似値である単なる「信号存在」又は「信号欠如」となっている。図の右側には、検査シーケンスに対する制御システム出力応答の組Sが示されているが、必ずしもこの図に示される検査シーケンスである必要はない。
【図4a3】図4a2に類似しているが、測定値の想定され得るエラーの他の考えられる近似値である「ステップ変化」を有するシミュレート検査信号を示す図である。
【図4a4】想定され得るシミュレート検査信号の更に現実的なイメージであり、前述の欠如/存在信号、ステップ変化信号、急激に変化する連続信号、緩慢なドリフト信号、幾つかのエラーがほぼ同時に或いは互いに重なり合って生じる時間を示す図である。
【図4a5】最初の検査署名と制御システムのその後の制御信号取得との間で制御信号を比較する際に制御システムの応答が変化したか否かを決定するための比較・決定プロセスのためのモデルを示す図である。
【図4b】制御システムを有する船舶を示す図である。この制御システムにあっては、1つ又はそれ以上の実際のセンサ信号が検査室に対する通信ライン介してシミュレートセンサ信号に置き換えられ、また、制御システムから船舶のアクチュエータへの1つ又はそれ以上の制御信号は、好ましくは船舶のアクチュエータに送られる代わりに、通信ラインを介して検査室へと送り戻される。
【図4c】一般に船舶の制御システムに対して測定値を供給するピッチ、ロール、風速、風向のためのセンサの組、GPS位置センサ、DGPS位置センサ、水中音響位置センサなどが通信ラインを介して遠隔検査室からのシミュレート測定値と置き換えられる船舶を示す図である。制御システムは、シミュレート測定値に対して応答する。応答は、通常、船舶のアクチュエータ、例えばプロペラ、方向舵、トンネルスラスタ、アジマススラスタに対して制御信号を与える。代わりに、応答が通信ラインを介して遠隔検査室へ送られる。遠隔検査室では、例えばアルゴリズムの形態を成す船舶シミュレータが、遠く離れた船舶の制御システムからの制御信号に応じてシミュレート船舶の動的な動作を計算するとともに、更新される制御信号などの形態を成す新たな応答のため、船舶の新たな状態を遠く離れた上記制御システムへ送り戻す。
【図5】(xを中心とする)ロール、(yを中心とする)ピッチ、(zを中心とする)ヨーのような回転動作、及び、(xに沿う)うねり、(yに沿う)横揺れ、(zに沿う)縦揺れのような並進動作の形態を成す船舶の動きの概略を示す図である。
【図6】動的位置決めに関与する、例えば係留しない(ある場合には係留を伴う)石油掘削に関与する重要な縦揺れ、横揺れ、ヨーの船舶の動きの概略を示す図である。
【図7】掘削中に動的位置決めの下で掘削プラットフォームを制御するために制御システムが使用される本発明の使用に関連する問題の略図を示す図である。実際の位置及び所望の位置がボールドフェース「X」でマーキングされている。
【図8】船舶のプランニング、建設、試運転、海上試運転、動作中に船舶の制御システムを検査する一般的な時点におけるタイムラインを示す図である。
【図9】2部品シミュレータ構成を備える本発明の好ましい実施形態を示す図である。この2部品構成は、船上の制御システムへの通常のセンサ信号ライン及びコマンド信号ラインに接続するためのカスタム配置されたスイッチ又はコネクタを有する第1の船上オンラインシミュレーティングコンピュータを備えており、カスタム配置されたスイッチ又はコネクタは制御信号を出力するためのものであり、また、遠隔検査室の検査マネージャ(33)に対する通信ラインが設けられている。
【図10】図9と同様の図であり、2部品シミュレータ構成を備える本発明の第2の好ましい実施形態を示す図である。この2部品構成は、船上の制御システムへ接続するための制御システムメーカ設計のインタフェースを有する船上オンラインシミュレーティングコンピュータを備えており、また、遠隔検査室の検査マネージャ(33)に対する通信ラインが設けられている。
【符号の説明】
【0077】
1:−
2:制御システム(2)
3:アクチュエータ(プロペラ16、スラスタ17、方向舵18)
4:船舶、船、掘削船、ドリリングプラットフォーム、製造プラットフォーム、或いは、他の航洋船
4’:シミュレート船舶、一般にシミュレータアルゴリズムを備える近くの或いは遠隔のシミュレータ(30R又は30L)における船舶モデル
5:船舶の動的パラメータ。5a:質量m、5b:5c:質量中心の位置、5c、5d、5e:船舶軸周りの慣性モーメント、質量分布、船体パラメータなど
6:遠隔検査室(40)における第1のリアルタイムインタフェース(6a)、並びに、第1の船舶(4a)及び第2の船舶(4b)側の第2のリアルタイムインタフェース(6b)を含む通信ライン
7:センサ(8)からのセンサ信号:7a:位置、7b:進路、7c:速度、7d:風速(相対風速)、7e:風向(相対的風向)、7f:ピッチ角度、7g:ロール角度、7h:海底のトラン4’スポンダに対する水中音響(相対)位置、7i:GPS/慣性位置及び進路(7j)、潮流速度(7k)、潮流方向(7l)
7’:一般にシミュレータアルゴリズム(32)を備える近くの或いは遠隔のシミュレータ(30R又は30L)で計算された或いは所定のシミュレート船舶(4’)におけるシミュレートセンサ信号
8:センサ:8a:位置センサ、8b:(ジャイロ)−コンパス、8c:速度センサ、8d:風速センサ、8e:風向センサ、8f:ピッチセンサ、8g:ロールセンサ、8h:水中音響位置センサ、8i:位置及び進路の「シーパス200」GPS/慣性センサ(8j)
9:コマンド入力装置(10)からのコマンド信号:9a:所望の位置、9b:所望の進路、9c:所望の速度など
9’:シミュレートコマンド信号
10:コマンド入力装置:所望の位置9aを指定するための位置指定装置10a、所望の進路9bを指定するためのホイール10b、所望の速度を指定するための速度指定装置10cなど
11:制御システム(2)へのコマンド信号(9)のための1つ又はそれ以上のコマンド信号ライン又は通信バス
12:制御システム(2)へのセンサ信号(7)のための1つ又はそれ以上のセンサ信号ライン又は通信バス
13:プロペラ(16)及びスラスタ(17)におけるシャフト速度(13a、13b)、並びに、方向舵(18)又はスラスタ(17)における角度(13c)を含む制御信号
13’:遠隔検査室(40)へ送られる制御信号
14:制御システム(2)からアクチュエータ(3)(16、17、18)への1つ又はそれ以上の第3の信号ライン(14)又は通信バス
15:データロガー
15a、15b、15c:センサ信号(7)、コマンド信号(9)が制御システム(2)に入らないように切り離すとともに、上記制御システム(2)からの出力制御信号(13)を切り離し、また、ローカルシミュレータ(32L)への及びローカルシミュレータ(32L)からの人工センサ信号(7’)、人工コマンド信号(9’)、出力制御信号(13’)を遠隔検査室(40)からの通信ライン(6)を介して直接的又は間接的に接続するためのスイッチ
16:プロペラ(16)
17:スラスタ(17)
18:方向舵(18):(「アクチュエータ」(3)も)
19:状態信号
30:船舶シミュレータ、すなわち、遠隔検査室(40)に配置された船舶シミュレータ(30R)又は局所的に配置された船舶シミュレータ(30L)を有するコンピュータ
30R:遠隔検査室(40)に配置された船舶シミュレータ(30R)を有するコンピュータ
30L:検査される船又は船舶に局所的に配置された船舶シミュレータ(30L)を有するコンピュータ
31:センサ信号(7)、コマンド信号(9)、船舶(4)の動的パラメータ(5)に基づいて船舶アクチュエータ(16、17、18)への制御信号(13)を計算するとともに、制御信号(13)を信号ライン(14)を介して例えばプロペラ(16)、スラスタ(17)、方向舵(18)等のアクチュエータ(3)へ送信するための制御アルゴリズム(31)
32:船舶パラメータ(5)、シミュレートされた風速及び風向、シミュレートされた波の上昇及び波の方向、シミュレートされた潮流速度及び潮流方向などに基づいてセンサ信号(7’)に対応するシミュレート状態(50’)によって与えられる船舶の動的な動き及び船舶(4)のアクチュエータ(3)の力を計算するための上記船舶シミュレータコンピュータ(30)におけるアルゴリズム
33:検査マネージャアルゴリズム(34)を有するコンピュータ
34:バッチ形式で検査内容を船舶シミュレータ(30L/30R)に対して出力するとともに、結果として得られる制御システム(2)からの制御信号をバッチ形式で入力する検査マネージャアルゴリズム
40:遠隔検査室
41R:人工測定値(7a’、7b’、7c’、……)を上記制御システム(2)へ供給するために上記遠隔検査室(40)に配置された遠隔検査信号源(41R)
41L:人工測定値(7a’、7b’、7c’、……)を上記制御システム(2)へ供給するために検査される船舶(4)又はその近傍に配置されたローカル検査信号源(41L)
42:上記所定の人工測定信号シーケンス(T0)に対する上記制御システム(2)からの応答(S0)又は上記与えられたシーケンス(T0)(或いは、他の与えられた又は自然に生じる又は任意の測定値シーケンス(T1、T2、T3、……))に対するその後の応答(S1、S2、S3、……)を記録する制御信号ロガー(42)
43:人工コマンド信号(9a’、9b’、9c’、……)を生成するための検査コマンド装置(43)
44:上記制御システム署名応答(S0)を形成するために使用される上記検査シーケンス(T0)を記憶し又は/及びその後の検査シーケンス(T1、T2、T3、……)を記憶するための上記検査信号源(41R/41L)に接続されるメモリ(44)
50:縦揺れ、横揺れ、ヨーにおける速度、ロール、ピッチ、ヨーにおける角速度、x、y、zにおける位置、ロー、ピッチ、ヨーにおける角度、プロペラのシャフト速度及び方向舵の角度などのアクチュエータの状態変数のような1つ又はそれ以上の変数を含む船舶(4)の状態(50)であり、これにより、所定の時刻における状態(50)は、上記時刻における船舶及びアクチュエータの動きを独自に規定する。状態(50)は、センサ信号(9)に対応し、センサ信号(9)は、一般に上記状態(50)の一部における値を含む。
50’:上記シミュレータ(30)によって計算されたシミュレート船舶(4’)のシミュレート状態(50’)。上記シミュレート状態(50’)は、状態(50)の変数のシミュレート値を含み、状態(50’)は、シミュレートセンサ信号(9’)に対応している。
T0:人工測定値(7a’、7b’、7c’、……)の第1の検査シーケンス
S0:コマンド信号(13a、13b、13c、……)を含む第1のコマンドシステム応答
【特許請求の範囲】
【請求項1】
船舶(4)の制御システム(2)を検証するための方法であって、前記制御システム(2)は、その動作状態において、センサ(8)からのセンサ信号(7)及び1つ又はそれ以上のコマンド入力装置(10)からのコマンド信号(9)を受信するようになっており、前記制御システム(2)は、前記測定値(7)及びコマンド信号(9)に対する応答として、制御信号(13)を前記船舶のアクチュエータ(3)に対して供給することにより、前記船舶(4)の所望の位置、速度、進路又は他の状態変数を維持する方法において、
第1の時間(t0)中に、前記制御システム(2)に対する1つ又はそれ以上の実際のセンサ信号(7a、7b、7c、……)の受信を切り離して、前記1つ又はそれ以上の実際のセンサ信号を、検査信号源(41)から前記制御システム(2)への1つ又はそれ以上の人工の測定値(7a’、7b’、7c’、……)を含む第1の検査シーケンス(T0)と置き換えるステップと、
前記実際の及び/又は人工のセンサ信号(7、7’)に基づいて前記制御システム(2)を機能させて、前記第1の時間(t0)における前記第1の検査シーケンス(T0)に対する応答として前記制御システム(2)の制御信号(13)として制御信号ロガー(42)に記録される制御信号(13’)を生成するステップと、
前記第1の時間(t0)における前記第1の検査シーケンス(T0)に対する前記制御システム(2)の応答(S0)を前記制御システム(2)の署名応答(S0)として記憶するステップと、
を含み、
その後の時間(t1、t2、t3、……)において、前記制御システム(2)に対して入力される同じ所定の検査シーケンス(T0)を使用して、前記制御システム(2)からのその後の応答(S1、S2、S3、……)を記録するとともに、前記その後の応答(S1、S2、S3、……)が前記署名応答(S0)にほぼ類似しているかどうかを決定して、前記制御システム(2)が変更されていないことを検証し、或いは、前記その後の応答(S1、S2、S3、……)が前記署名応答(S0)と大きく異なるかどうかを決定して、前記制御システム(2)が変更されたことを示すという目的を有すること、
を特徴とする方法。
【請求項2】
1つ又はそれ以上のセンサ信号(7a、7b、7c、……)を人工のセンサ信号(7a’、7b’、7c’、……)と置き換える前記ステップは、1つ又はそれ以上の信号状況、すなわち、
1つ又はそれ以上の人工のセンサ信号(7a’、7b’、7c’、……)の単なる欠如又は存在、
現実的範囲内での1つ又はそれ以上の人工のセンサ信号(7a’、7b’、7c’、……)のステップ変化、
対応する実信号(7a、7b、7c、……)の現実的範囲内での1つ又はそれ以上の人工信号(7a’、7b’、7c’、……)の緩慢なドリフト又は変化、
ノイズ、ホワイト、又は、
実測定信号(7)又は人工測定信号(7’)上におけるノイズの重ね合わせ、
を含むことを特徴とする請求項1に記載の方法。
【請求項3】
前記検査シーケンス(T0)は、1つ又はそれ以上の記録された実際の測定信号(7a又は7a’、7b又は7b’、7c又は7c’、7d又は7d’、……)を含むことを特徴とする請求項1に記載の方法。
【請求項4】
前記検査シーケンス(T0)は、前記検査信号源(41)に接続されたメモリ(44)に記憶されることを特徴とする請求項1に記載の方法。
【請求項5】
センサ信号(7’)の前記シーケンスは、所定のセンサ信号(7’)を含むことを特徴とする請求項1に記載の方法。
【請求項6】
船舶(4)の動的位置に関して制御システム(2)を検査して、前記船舶のために与えられた所望の位置(7a)を、前記位置(7a)から所定の範囲内に維持することを特徴とする請求項1に記載の方法。
【請求項7】
海での通常の航行のために設けられた船舶(4)、例えば異なる行き先間又は中継港から中継港まで走行する旅客船、フェリー、貨物輸送船、タンカーなどのための制御システム(2)を検査することを特徴とする請求項1に記載の方法。
【請求項8】
人工の測定値(7a’、7b’、7c’、7d’、……)の前記検査信号シーケンス(T0)を遠隔検査室(40)から通信ライン(6)を介して前記制御システム(2)へ送信することを含むことを特徴とする請求項1に記載の方法。
【請求項9】
前記制御信号シーケンス(S0、S1、S2)を前記制御システム(2)から通信ライン(6)を介して検査室(40)へ送信することを含むことを特徴とする請求項1又は請求項8に記載の方法。
【請求項10】
前記遠隔検査室(40)内の遠隔配置されたシミュレータコンピュータ(30R)を使用して、前記シミュレートセンサ信号(7’)及び前記シミュレートコマンド信号(9’)を前記通信ライン(6)を介して前記船舶側の前記ローカルシミュレータコンピュータ(30L)へ送信するとともに、前記制御信号(13’)を前記ローカルシミュレータコンピュータ(30L)から前記通信ライン(6)を介して受信することを含むことを特徴とする請求項8又は請求項9に記載の方法。
【請求項11】
前記検査シーケンス(T0)は、前記制御システム(2)に対して供給される人工測定信号(7a’、7b’、7c’、7d’、……)を含み、前記人工測定信号は、実測定信号と同じ性質を有し、例えば同様の信号電圧範囲、信号電流範囲、同様の論理的又はブール範囲、同様のデジタル範囲及びフォーマットを与えることを特徴とする請求項1に記載の方法。
【請求項12】
前記1つ又はそれ以上の人工測定信号(7a’、7b’、7c’、7d’、……)は、前記実測定信号(7a、7b、7c、7d、……)上に重ね合わされる人工測定値であることを特徴とする請求項1に記載の方法。
【請求項13】
前記1つ又はそれ以上の人工測定信号(7a’、7b’、7c’、7d’、……)は、前記実測定信号(7a、7b、7c、7d、……)上に重ね合わされるノイズであることを特徴とする請求項1に記載の方法。
【請求項14】
前記制御システム(2)に対して供給される前記人工測定信号(7a’、7b’、7c’、7d’、……)は、所定の経時的振幅変動を有し、前記振幅変動が所定の範囲を有することを特徴とする請求項1に記載の方法。
【請求項15】
センサ信号(7)の受信の切り離しに加えて、前記コマンド入力装置(10)から前記制御システム(2)への1つ又はそれ以上のコマンド信号(9a、9b、9c、……)の受信を切り離すとともに、前記1つ又はそれ以上のコマンド信号(9a、9b、9c、……)を、前記制御システム(2)に供給される前記検査シーケンス(T0)中に含まれる検査コマンド装置(43)によって生成される1つ又はそれ以上の人工コマンンド信号(9a’、9b’、9c’、……)と置き換えるステップと、
前記実際の及び/又は人工の(或いは省略される)センサ信号(7、7’)及び/又は前記人工コマンド信号(9a’、9b’、9c’、……)に基づいて前記制御システム(2)を機能させて、前記検査シーケンス(T0)に対する応答として前記制御システム(2)の制御信号(13)として制御信号ロガー(42)に記録される制御信号(13’)を生成するステップと、
を更に含むことを特徴とする請求項1に記載の方法。
【請求項16】
前記応答(S1)が前記署名応答(S0)にほぼ類似しているかどうかを決定する前記ステップは、
前記第1の応答すなわち署名応答(S0)と前記第2の応答(S1)との間の時間の関数としての差(D0−1)を生成するステップと、
前記差からの1次元以上のRMS差を時間の関数として生成するステップと、
前記差(D0−1)が十分に小さい、すなわち、十分に小さい前記応答における幾つかの決定されたサイズよりも小さいかどうかを決定して、前記制御システム(2)が変更されないままであることを検証し、
逆に、前記差(D0−1)が前記決定されたサイズよりも大きい場合に、前記制御システム(2)が第2の検査の時点で或いはその前に変更されたと判断するステップと、
を実施することを特徴とする請求項1に記載の方法。
【請求項17】
時間unにおけるシーケンスS0の多次元値を、
S0(un,1,un,2,un,3,un,4,……,un,m,……,un,k)
で示し、第1の添字nは時刻u1、u2、……un……、uNを示し、第2の添字1、2、3、4、……m、……、Kは制御チャンネル信号等(13a、13b、13c、……、13m、……、13K)に対応し、同様に、時間unにおけるシーケンスS1の多次元値は、
S1(un,1,un,2,un,3,un,4,……,un,m,……,un,k)
であることを特徴とする請求項16に記載の方法。
【請求項18】
ローパスフィルタリングS0、S1によりシーケンスS0及びS1の高周波成分を除去し、また、S0のフィルタ処理バージョンを
SF0(un,1,un,2,un,3,un,4,……,un,m,……,un,k)
で示し、S1のフィルタ処理バージョンを、
SF1(un,1,un,2,un,3,un,4,……,un,m,……,un,k)
で示すことを特徴とする請求項17に記載の方法。
【請求項19】
フィルタ処理されていないS0とS1との間の差におけるRMS値に関してS0とS1との間の差を以下のように計算し、
RMS(S0,S1)={[S1((u1))−S0((u1))]2+[S1((u2))−S0((u2))]2+……+[S1((uN))−S0((uN))]2}の平方根
そして、時系列間の差を(D0−1)=RMS(S0,S1)として示すことを特徴とする請求項17に記載の方法。
【請求項20】
フィルタ処理されたSF0とSF1との間の差におけるRMS値に関してS0とS1との間の差を以下のように計算し、
RMS(SF0,SF1)={[SF1((u1))−SF0((u1))]2+[SF1((u2))−SF0((u2))]2+……+[SF1((uN))−SF0((uN))]2}の平方根
そして、時系列間の差を(D0−1)=RMS(S0,S1)として示すことを特徴とする請求項17に記載の方法。
【請求項21】
船舶(4)内の制御システム(2)のための検査方法であり、前記制御システム(2)が、1つ又はそれ以上のアクチュエータ(3)に対する制御信号(13)を用いた前記船舶(4)の制御及び監視に関わる検査方法であって、
前記制御システム(2)への第1のセンサ信号ライン(12)を介して1つ又はそれ以上のセンサ(8)から前記制御システム(2)へとセンサ信号(7)をリアルタイムで取得するステップと、
前記制御システム(2)への第2の信号ラインすなわちコマンド信号ライン(11)を介してコマンド入力装置(10)から前記制御システム(2)へとコマンド信号(9)を取得するステップと、
1つ又はそれ以上の前記センサ信号(7)及び前記コマンド信号(9)に基づいて前記制御システム(2)内の制御アルゴリズム(31)で計算するとともに、前記制御信号(13)を第3の信号ライン(14)を介して前記アクチュエータ(3)へ送信するステップと、
を順次に施行するステップを含む検査方法において、
1つ又はそれ以上の前記センサ(8)からの1つ又はそれ以上の前記センサ信号(7)を切り離し、或いは、前記コマンド入力装置(10)からの前記コマンド信号(9)を切り離すことにより、選択されたセンサ信号(7)又はコマンド信号(9)が前記制御システム(2)へと流れないようにするとともに、1つ又はそれ以上の前記切り離されたセンサ信号(7)又は前記コマンド信号(9)を、遠隔検査室(40)で前記船舶(4)に関して生成され且つ通信ライン(6)を介して1つ又はそれ以上の前記信号ライン(12、14)により前記制御システム(2)へと送られる対応するシミュレートセンサ信号(7’)又はコマンド信号(9’)と交換するステップと、
前記実際のセンサ信号及び/又はシミュレートセンサ信号(7a又は7a’、7b又は7b’、7c又は7c’、……)或いは前記実際のコマンド信号及び/又は制御信号(13’)の前記コマンド信号(9a又は9a’、9b又は9b’、9c又は9c’、……)に基づき制御システム(2)において連続的に計算するとともに、前記制御信号(13’)に基づいて船舶モデル(4’)の新たな動的状態(50’)のアルゴリズム(32)により第1のローカルシミュレータ(30L)においてシミュレートするステップと、
前記制御信号(13’)を通信ライン(6)を介して前記遠隔検査室(40)へ送信するステップと、
を含むことを特徴とする検査方法。
【請求項22】
前記遠隔検査室(40)内の遠隔配置されたシミュレータコンピュータ(30R)を使用して、前記シミュレートセンサ信号(7’)及び前記シミュレートコマンド信号(9’)を前記通信ライン(6)を介して前記船舶側の前記ローカルシミュレータ(30L)に対して送信すること、及び、前記ローカルシミュレータコンピュータ(30L)から前記制御信号(13’)を前記通信ライン(6)を介して受信することを含むことを特徴とする請求項21に記載の方法。
【請求項23】
前記センサ信号(7)は、前記センサ(8)からの1つ又はそれ以上の以下のセンサパラメータ、すなわち、
GPS受信器(8a)等の位置センサ(8a)、水中音響位置センサ(8h)、積算加速度センサなどからの前記船舶の位置(7a)、
進路センサ(8b)、例えばジャイロコンパス又は他のコンパスからの進路(7b)、
速度センサ(8c)又は1つの積算加速度センサからの速度(7c)、
風速計(8d、8e)からの風速(7d)及び風向(7e)、
ロールセンサ(8f)からのロール角度(7f)、
ピッチセンサ(8g)からのピッチ角度(7g)、
を含むことを特徴とする請求項21に記載の方法。
【請求項24】
前記制御信号(13)は、1つ又はそれ以上の所望の位置(9a)、進路(9b)、速度(9c)を得るため、1つ又はそれ以上のプロペラ(16)又はスラスタ(17)のシャフト速度(13a、13b)の形態や、方向舵(18)又はスラスタ(17)及び可能であれば他の制御装置における角度(13c)の形態を成す信号(13a、13b、13c)を含むことを特徴とする請求項21に記載の方法。
【請求項25】
前記プロペラ(16)が1つ又はそれ以上のプロペラ(16a、16b、16c、……)を含むことを特徴とする請求項21に記載の方法。
【請求項26】
前記制御装置(18)が1つ又はそれ以上の方向舵(18a、18b)を含むことを特徴とする請求項21に記載の方法。
【請求項27】
前記制御装置(18)が1つ又はそれ以上のスラスタ(17)を含むことを特徴とする請求項21に記載の方法。
【請求項28】
前記コマンド入力装置(10)は、少なくとも1つの位置指定装置(10a)、ホイール(10b)、速度指定装置(10c)、或いは、所望のロール角度、ピッチ角度、縦揺れ補償などを指定するための装置(10x)を含み、これらの装置は、1つ又はそれ以上の所望の位置(9a)、所望の進路(9b)、所望の速度(9c)又は幾つかの他の所望の変数(9x)、例えば所望のロール角度、所望のピッチ角度、所望の縦揺れ補償等などのためのコマンド信号を与えることを特徴とする請求項21に記載の方法。
【請求項29】
前記遠隔検査室(40)は、検査における前記シミュレートセンサ信号(7’)及びシミュレートコマンド信号(9’)並びに残っていればその残りの実際のセンサ信号(7)及び残りの実際のコマンド信号(9)に基づいて前記制御システム(2)からの前記制御信号(13、13’)が前記船舶(4)の所望の状態をもたらし、これに基づいて前記制御システム(2)が認証されるということを検証するために使用されることを特徴とする請求項21に記載の方法。
【請求項30】
前記制御システム(2)の前記制御アルゴリズム(31)における計算は、質量(m)、船舶の軸方向慣性モーメント、船舶の質量分布、船体の幾何学的形状を決定する船体パラメータを含む船舶の動的パラメータ(5)を使用することを特徴とする請求項21に記載の方法。
【請求項31】
前記センサ(8)からの前記センサ信号(7)の前記制御システム(2)に対する切り離しは、前記信号ライン(12)上のスイッチ(15a)によって行なわれることを特徴とする請求項21に記載の方法。
【請求項32】
前記コマンド入力装置(10)からの前記コマンド信号(9)の前記制御システム(2)に対する切り離しは、前記信号ライン(11)上のスイッチ(15b)によって行なわれることを特徴とする請求項21に記載の方法。
【請求項33】
前記遠隔検査室(40)が陸上に配置され、検査される前記船舶(4a、4b、4c、……)は、前記検査室(40)から遠く離れた距離、一般的には1〜20000kmの距離に配置され、検査される船舶は、港、ドック又は構内に停泊され或いは外洋に位置されていることを特徴とする請求項21に記載の方法。
【請求項34】
故障状況は、その時点で前記センサ信号(7)又は前記コマンド信号(9)の1つ又はそれ以上の選択された信号を切り離して部品の故障をシミュレートすることにより検査され、前記制御信号(13、13’)及び状態信号(19、19’)の形態を成す制御システムの応答は、前記遠隔検査室(40)のロガー(15)に記録されることを特徴とする請求項21に記載の方法。
【請求項35】
故障状況は、前記シミュレートセンサ信号(7’)の選択において乱れを変更し或いは生成することにより、或いは、前記遠隔検査室(40)から前記船舶(4)内の前記制御システム(2)へと送られる前記シミュレートセンサ信号(7’)に対して天候、風、電気的ノイズのような外的な乱れを生成することにより検査され、前記制御信号(13、13’)及び前記状態信号(19、19’)の形態を成す前記制御システム(2)の応答は、前記遠隔検査室(40)内の前記ロガー(15)に記録されることを特徴とする請求項21に記載の方法。
【請求項36】
前記船舶(4)上の前記制御システム(2)のための新たなソフトウェアは、前記遠隔検査室(40)から前記通信ライン(6)を介して送信されることを特徴とする請求項21に記載の方法。
【請求項37】
前記遠隔検査室(40)は、前記制御システム(2)の検査及び検査結果に基づいて、船舶(4)の通常の動作における使用に関して前記制御システム(2)を認可し且つ前記制御システム(2)を認証するために使用されることを特徴とする請求項21に記載の方法。
【請求項38】
船舶(4)における制御システム(2)のための検査システムであって、前記制御システム(2)が前記船舶(4)を制御して監視する検査システムであり、
1つ又はそれ以上のセンサ信号(7)を信号ライン(12)を介して前記制御システム(2)へ送るための前記船舶(4)上の1つ又はそれ以上のセンサ(8)と、
所望の位置、進路、速度(9)等のうちの1つ又はそれ以上をコマンド信号ライン(11)を介して前記制御システム(2)に送る前記船舶(4)上のコマンド入力装置(10)と、
前記センサ信号(7)及び前記コマンド信号(9)に基づいて船舶アクチュエータ(3)への制御信号(13)を計算するとともに、前記制御信号(13)を信号ライン(14)を介して前記アクチュエータ(3)へ送るための制御システム(2)中のアルゴリズム(31)と、
を備える検査システムにおいて、
1つ又はそれ以上のシミュレートセンサ信号(7’)及び/又はシミュレートコマンド信号(9’)を遠隔検査室(40)から前記制御システム(2)へ送るための1つ又はそれ以上の通信ライン(6)と、
船舶(4)における前の状態(50’)、前記制御信号(13、13’)、動的パラメータ(5)に基づく船舶モデル(4’)の新たなセンサ信号(7’)のシミュレーションのためのアルゴリズム(32)を含むシミュレータ(30)と、
を有し、
前記通信ライン(6)は、前記制御信号(13)のうちの前記センサ信号(7、7’)の実際の及び/又はシミュレートされた値又は前記コマンド信号(9,9’)の実際の及び/又はシミュレートされた値に基づいて前記制御システム(2)において連続計算して所望の位置、進路、速度(9)等のうちの少なくとも1つを得るために、前記船舶モデル(4’)の前記新たなシミュレートセンサ信号(7’)を前記制御システム(2)へ送り戻すようになっており、
前記通信ライン(6)は、制御信号(13)の形態を成す前記制御システム(2)からの応答を制御信号(13’)として前記遠隔検査室(40)へ送るようになっていること、
を特徴とする検査システム。
【請求項39】
1つ又はそれ以上の前記センサ信号(7)を前記制御システム(2)への前記信号ライン(12)から切り離すために第1のスイッチ(15a)が設けられていることを特徴とする請求項38に記載の検査システム。
【請求項40】
1つ又はそれ以上の前記コマンド信号(10)を前記制御システム(2)への前記信号ライン(11)から切り離すために第2のスイッチ(15b)が設けられていることを特徴とする請求項38に記載の検査システム。
【請求項41】
1つ又はそれ以上の前記制御信号(13)を前記制御システム(2)からの前記信号ライン(14)から切り離すために第3のスイッチ(15c)が設けられていることを特徴とする請求項38に記載の検査システム。
【請求項42】
前記アクチュエータ(3)への前記制御信号(13)を計算するため、前記船舶(4)の前記動的パラメータ(5)が前記制御システム(2)の前記アルゴリズム(31)内に入ることを特徴とする請求項38に記載の検査システム。
【請求項43】
前記遠隔検査室(40)にはシミュレータ(30)が設けられていることを特徴とする請求項38に記載の検査システム。
【請求項44】
1つ又はそれ以上のシミュレートセンサ信号(7’)を前記遠隔検査室(40)から送信するための前記通信ライン(6)は、前記遠隔検査室(40)側の第1のリアルタイムインタフェース(6a)に接続されるとともに、前記第1のリアルタイムインタフェース(6a)から切断されることを特徴とする請求項38に記載の検査システム。
【請求項45】
前記通信ライン(6)は、船舶(4)側の第2のリアルタイムインタフェース(6b)に接続されるとともに、前記第2のリアルタイムインタフェース(6b)から切断されるようになっており、前記第2のリアルタイムインタフェース(6b)は、前記制御システム(2)への前記信号ライン(11)に対してスイッチ(15a)により接続されることを特徴とする請求項38に記載の検査システム。
【請求項46】
前記遠隔検査室(40)からの前記シミュレートコマンド信号(9’)を前記リアルタイムインタフェース(6b)と前記通信ライン(6)と前記リアルタイムインタフェース(6b)とを介して前記制御システム(2)へ送るためのシミュレートコマンド入力装置(10’)が設けられていることを特徴とする請求項38に記載の検査システム。
【請求項47】
前記遠隔検査室(40)内の遠隔配置されたシミュレータコンピュータ(30R)を使用して、前記シミュレートセンサ信号(7’)及び前記シミュレートコマンド信号(9’)を前記通信ライン(6)を介して前記船舶側の前記ローカルシミュレータ(30L)に対して送信すること、及び、前記ローカルシミュレータコンピュータ(30L)から前記制御信号(13’)を前記通信ライン(6)を介して受信することを含むことを特徴とする請求項44に記載の検査システム。
【請求項48】
前記遠隔検査室(40)内の遠隔配置されたマネージャ(33)を使用して、前記シミュレート状態(50’)の初期値と、前記シミュレートコマンド信号(9’)の時間系列と、海の状態、潮流、風速、風向におけるシミュレート値とを前記通信ライン(6)を介して前記船舶側の前記ローカルシミュレータ(30L)に対して送信すること、及び、前記ローカルシミュレータコンピュータ(30L)から前記制御信号(13’)を前記通信ライン(6)を介して受信することを含み、前記ローカルシミュレータ(30L)が前記制御システム(2)に接続され、これにより、前記制御システムは、前記ローカルシミュレータ(30L)から前記シミュレートセンサ信号(9’)及び前記シミュレートコマンド信号(9’)を取得するとともに、前記制御信号(13’)をローカルシミュレータ(30L)に対して出力することを特徴とする請求項44に記載の検査システム。
【請求項49】
前記制御システム(2)の前記アルゴリズム(31)の全部又は一部は、前記遠隔検査室(40)からの前記通信ライン(6)にわたって変更され、較正され、或いは、交換されることを特徴とする請求項38に記載の検査システム。
【請求項50】
前記制御信号(13)は、1つ又はそれ以上のプロペラ(16)又はスラスタ(17)のシャフト速度(13a、13b)や、方向舵(18)又はスラスタ(17)又は可能であれば他の制御装置における角度(13c)の形態を成す信号(13a、13b、13c)を含むことを特徴とする請求項38に記載の検査システム。
【請求項51】
前記センサ(8)は、
− 前記船舶(4)の位置(7a)を決定するためのGPS受信器(8a)等の位置測定装置(8a)、水中音響位置センサ(8h)、積算加速度センサなど
− 前記船舶(4)の進路(7b)を決定するための進路測定装置(8b)、例えばジャイロコンパス又は幾つかの他のコンパス
− 前記船舶(4)の速度(7c)を決定するための速度センサ(8c)又は1つの積算加速度センサ
− (相対)風速(7d)及び風向(7e)を与えるための風速計(8d、8e)
− ロール角度(7f)を与えるためのロール角度センサ(8f)
− ピッチ角度(7g)を与えるためのピッチ角度センサ(8g)
のうちの1つ又はそれ以上を含むことを特徴とする請求項38に記載の検査システム。
【請求項52】
前記遠隔検査室(4)は、前記センサ信号(7、7’)に対する前記制御システム(2)からの前記制御信号及び状態信号(13’、19’)の形態を成す応答を記録するためのデータロガー(15)を含むことを特徴とする請求項38に記載の検査システム。
【請求項1】
船舶(4)の制御システム(2)を検証するための方法であって、前記制御システム(2)は、その動作状態において、センサ(8)からのセンサ信号(7)及び1つ又はそれ以上のコマンド入力装置(10)からのコマンド信号(9)を受信するようになっており、前記制御システム(2)は、前記測定値(7)及びコマンド信号(9)に対する応答として、制御信号(13)を前記船舶のアクチュエータ(3)に対して供給することにより、前記船舶(4)の所望の位置、速度、進路又は他の状態変数を維持する方法において、
第1の時間(t0)中に、前記制御システム(2)に対する1つ又はそれ以上の実際のセンサ信号(7a、7b、7c、……)の受信を切り離して、前記1つ又はそれ以上の実際のセンサ信号を、検査信号源(41)から前記制御システム(2)への1つ又はそれ以上の人工の測定値(7a’、7b’、7c’、……)を含む第1の検査シーケンス(T0)と置き換えるステップと、
前記実際の及び/又は人工のセンサ信号(7、7’)に基づいて前記制御システム(2)を機能させて、前記第1の時間(t0)における前記第1の検査シーケンス(T0)に対する応答として前記制御システム(2)の制御信号(13)として制御信号ロガー(42)に記録される制御信号(13’)を生成するステップと、
前記第1の時間(t0)における前記第1の検査シーケンス(T0)に対する前記制御システム(2)の応答(S0)を前記制御システム(2)の署名応答(S0)として記憶するステップと、
を含み、
その後の時間(t1、t2、t3、……)において、前記制御システム(2)に対して入力される同じ所定の検査シーケンス(T0)を使用して、前記制御システム(2)からのその後の応答(S1、S2、S3、……)を記録するとともに、前記その後の応答(S1、S2、S3、……)が前記署名応答(S0)にほぼ類似しているかどうかを決定して、前記制御システム(2)が変更されていないことを検証し、或いは、前記その後の応答(S1、S2、S3、……)が前記署名応答(S0)と大きく異なるかどうかを決定して、前記制御システム(2)が変更されたことを示すという目的を有すること、
を特徴とする方法。
【請求項2】
1つ又はそれ以上のセンサ信号(7a、7b、7c、……)を人工のセンサ信号(7a’、7b’、7c’、……)と置き換える前記ステップは、1つ又はそれ以上の信号状況、すなわち、
1つ又はそれ以上の人工のセンサ信号(7a’、7b’、7c’、……)の単なる欠如又は存在、
現実的範囲内での1つ又はそれ以上の人工のセンサ信号(7a’、7b’、7c’、……)のステップ変化、
対応する実信号(7a、7b、7c、……)の現実的範囲内での1つ又はそれ以上の人工信号(7a’、7b’、7c’、……)の緩慢なドリフト又は変化、
ノイズ、ホワイト、又は、
実測定信号(7)又は人工測定信号(7’)上におけるノイズの重ね合わせ、
を含むことを特徴とする請求項1に記載の方法。
【請求項3】
前記検査シーケンス(T0)は、1つ又はそれ以上の記録された実際の測定信号(7a又は7a’、7b又は7b’、7c又は7c’、7d又は7d’、……)を含むことを特徴とする請求項1に記載の方法。
【請求項4】
前記検査シーケンス(T0)は、前記検査信号源(41)に接続されたメモリ(44)に記憶されることを特徴とする請求項1に記載の方法。
【請求項5】
センサ信号(7’)の前記シーケンスは、所定のセンサ信号(7’)を含むことを特徴とする請求項1に記載の方法。
【請求項6】
船舶(4)の動的位置に関して制御システム(2)を検査して、前記船舶のために与えられた所望の位置(7a)を、前記位置(7a)から所定の範囲内に維持することを特徴とする請求項1に記載の方法。
【請求項7】
海での通常の航行のために設けられた船舶(4)、例えば異なる行き先間又は中継港から中継港まで走行する旅客船、フェリー、貨物輸送船、タンカーなどのための制御システム(2)を検査することを特徴とする請求項1に記載の方法。
【請求項8】
人工の測定値(7a’、7b’、7c’、7d’、……)の前記検査信号シーケンス(T0)を遠隔検査室(40)から通信ライン(6)を介して前記制御システム(2)へ送信することを含むことを特徴とする請求項1に記載の方法。
【請求項9】
前記制御信号シーケンス(S0、S1、S2)を前記制御システム(2)から通信ライン(6)を介して検査室(40)へ送信することを含むことを特徴とする請求項1又は請求項8に記載の方法。
【請求項10】
前記遠隔検査室(40)内の遠隔配置されたシミュレータコンピュータ(30R)を使用して、前記シミュレートセンサ信号(7’)及び前記シミュレートコマンド信号(9’)を前記通信ライン(6)を介して前記船舶側の前記ローカルシミュレータコンピュータ(30L)へ送信するとともに、前記制御信号(13’)を前記ローカルシミュレータコンピュータ(30L)から前記通信ライン(6)を介して受信することを含むことを特徴とする請求項8又は請求項9に記載の方法。
【請求項11】
前記検査シーケンス(T0)は、前記制御システム(2)に対して供給される人工測定信号(7a’、7b’、7c’、7d’、……)を含み、前記人工測定信号は、実測定信号と同じ性質を有し、例えば同様の信号電圧範囲、信号電流範囲、同様の論理的又はブール範囲、同様のデジタル範囲及びフォーマットを与えることを特徴とする請求項1に記載の方法。
【請求項12】
前記1つ又はそれ以上の人工測定信号(7a’、7b’、7c’、7d’、……)は、前記実測定信号(7a、7b、7c、7d、……)上に重ね合わされる人工測定値であることを特徴とする請求項1に記載の方法。
【請求項13】
前記1つ又はそれ以上の人工測定信号(7a’、7b’、7c’、7d’、……)は、前記実測定信号(7a、7b、7c、7d、……)上に重ね合わされるノイズであることを特徴とする請求項1に記載の方法。
【請求項14】
前記制御システム(2)に対して供給される前記人工測定信号(7a’、7b’、7c’、7d’、……)は、所定の経時的振幅変動を有し、前記振幅変動が所定の範囲を有することを特徴とする請求項1に記載の方法。
【請求項15】
センサ信号(7)の受信の切り離しに加えて、前記コマンド入力装置(10)から前記制御システム(2)への1つ又はそれ以上のコマンド信号(9a、9b、9c、……)の受信を切り離すとともに、前記1つ又はそれ以上のコマンド信号(9a、9b、9c、……)を、前記制御システム(2)に供給される前記検査シーケンス(T0)中に含まれる検査コマンド装置(43)によって生成される1つ又はそれ以上の人工コマンンド信号(9a’、9b’、9c’、……)と置き換えるステップと、
前記実際の及び/又は人工の(或いは省略される)センサ信号(7、7’)及び/又は前記人工コマンド信号(9a’、9b’、9c’、……)に基づいて前記制御システム(2)を機能させて、前記検査シーケンス(T0)に対する応答として前記制御システム(2)の制御信号(13)として制御信号ロガー(42)に記録される制御信号(13’)を生成するステップと、
を更に含むことを特徴とする請求項1に記載の方法。
【請求項16】
前記応答(S1)が前記署名応答(S0)にほぼ類似しているかどうかを決定する前記ステップは、
前記第1の応答すなわち署名応答(S0)と前記第2の応答(S1)との間の時間の関数としての差(D0−1)を生成するステップと、
前記差からの1次元以上のRMS差を時間の関数として生成するステップと、
前記差(D0−1)が十分に小さい、すなわち、十分に小さい前記応答における幾つかの決定されたサイズよりも小さいかどうかを決定して、前記制御システム(2)が変更されないままであることを検証し、
逆に、前記差(D0−1)が前記決定されたサイズよりも大きい場合に、前記制御システム(2)が第2の検査の時点で或いはその前に変更されたと判断するステップと、
を実施することを特徴とする請求項1に記載の方法。
【請求項17】
時間unにおけるシーケンスS0の多次元値を、
S0(un,1,un,2,un,3,un,4,……,un,m,……,un,k)
で示し、第1の添字nは時刻u1、u2、……un……、uNを示し、第2の添字1、2、3、4、……m、……、Kは制御チャンネル信号等(13a、13b、13c、……、13m、……、13K)に対応し、同様に、時間unにおけるシーケンスS1の多次元値は、
S1(un,1,un,2,un,3,un,4,……,un,m,……,un,k)
であることを特徴とする請求項16に記載の方法。
【請求項18】
ローパスフィルタリングS0、S1によりシーケンスS0及びS1の高周波成分を除去し、また、S0のフィルタ処理バージョンを
SF0(un,1,un,2,un,3,un,4,……,un,m,……,un,k)
で示し、S1のフィルタ処理バージョンを、
SF1(un,1,un,2,un,3,un,4,……,un,m,……,un,k)
で示すことを特徴とする請求項17に記載の方法。
【請求項19】
フィルタ処理されていないS0とS1との間の差におけるRMS値に関してS0とS1との間の差を以下のように計算し、
RMS(S0,S1)={[S1((u1))−S0((u1))]2+[S1((u2))−S0((u2))]2+……+[S1((uN))−S0((uN))]2}の平方根
そして、時系列間の差を(D0−1)=RMS(S0,S1)として示すことを特徴とする請求項17に記載の方法。
【請求項20】
フィルタ処理されたSF0とSF1との間の差におけるRMS値に関してS0とS1との間の差を以下のように計算し、
RMS(SF0,SF1)={[SF1((u1))−SF0((u1))]2+[SF1((u2))−SF0((u2))]2+……+[SF1((uN))−SF0((uN))]2}の平方根
そして、時系列間の差を(D0−1)=RMS(S0,S1)として示すことを特徴とする請求項17に記載の方法。
【請求項21】
船舶(4)内の制御システム(2)のための検査方法であり、前記制御システム(2)が、1つ又はそれ以上のアクチュエータ(3)に対する制御信号(13)を用いた前記船舶(4)の制御及び監視に関わる検査方法であって、
前記制御システム(2)への第1のセンサ信号ライン(12)を介して1つ又はそれ以上のセンサ(8)から前記制御システム(2)へとセンサ信号(7)をリアルタイムで取得するステップと、
前記制御システム(2)への第2の信号ラインすなわちコマンド信号ライン(11)を介してコマンド入力装置(10)から前記制御システム(2)へとコマンド信号(9)を取得するステップと、
1つ又はそれ以上の前記センサ信号(7)及び前記コマンド信号(9)に基づいて前記制御システム(2)内の制御アルゴリズム(31)で計算するとともに、前記制御信号(13)を第3の信号ライン(14)を介して前記アクチュエータ(3)へ送信するステップと、
を順次に施行するステップを含む検査方法において、
1つ又はそれ以上の前記センサ(8)からの1つ又はそれ以上の前記センサ信号(7)を切り離し、或いは、前記コマンド入力装置(10)からの前記コマンド信号(9)を切り離すことにより、選択されたセンサ信号(7)又はコマンド信号(9)が前記制御システム(2)へと流れないようにするとともに、1つ又はそれ以上の前記切り離されたセンサ信号(7)又は前記コマンド信号(9)を、遠隔検査室(40)で前記船舶(4)に関して生成され且つ通信ライン(6)を介して1つ又はそれ以上の前記信号ライン(12、14)により前記制御システム(2)へと送られる対応するシミュレートセンサ信号(7’)又はコマンド信号(9’)と交換するステップと、
前記実際のセンサ信号及び/又はシミュレートセンサ信号(7a又は7a’、7b又は7b’、7c又は7c’、……)或いは前記実際のコマンド信号及び/又は制御信号(13’)の前記コマンド信号(9a又は9a’、9b又は9b’、9c又は9c’、……)に基づき制御システム(2)において連続的に計算するとともに、前記制御信号(13’)に基づいて船舶モデル(4’)の新たな動的状態(50’)のアルゴリズム(32)により第1のローカルシミュレータ(30L)においてシミュレートするステップと、
前記制御信号(13’)を通信ライン(6)を介して前記遠隔検査室(40)へ送信するステップと、
を含むことを特徴とする検査方法。
【請求項22】
前記遠隔検査室(40)内の遠隔配置されたシミュレータコンピュータ(30R)を使用して、前記シミュレートセンサ信号(7’)及び前記シミュレートコマンド信号(9’)を前記通信ライン(6)を介して前記船舶側の前記ローカルシミュレータ(30L)に対して送信すること、及び、前記ローカルシミュレータコンピュータ(30L)から前記制御信号(13’)を前記通信ライン(6)を介して受信することを含むことを特徴とする請求項21に記載の方法。
【請求項23】
前記センサ信号(7)は、前記センサ(8)からの1つ又はそれ以上の以下のセンサパラメータ、すなわち、
GPS受信器(8a)等の位置センサ(8a)、水中音響位置センサ(8h)、積算加速度センサなどからの前記船舶の位置(7a)、
進路センサ(8b)、例えばジャイロコンパス又は他のコンパスからの進路(7b)、
速度センサ(8c)又は1つの積算加速度センサからの速度(7c)、
風速計(8d、8e)からの風速(7d)及び風向(7e)、
ロールセンサ(8f)からのロール角度(7f)、
ピッチセンサ(8g)からのピッチ角度(7g)、
を含むことを特徴とする請求項21に記載の方法。
【請求項24】
前記制御信号(13)は、1つ又はそれ以上の所望の位置(9a)、進路(9b)、速度(9c)を得るため、1つ又はそれ以上のプロペラ(16)又はスラスタ(17)のシャフト速度(13a、13b)の形態や、方向舵(18)又はスラスタ(17)及び可能であれば他の制御装置における角度(13c)の形態を成す信号(13a、13b、13c)を含むことを特徴とする請求項21に記載の方法。
【請求項25】
前記プロペラ(16)が1つ又はそれ以上のプロペラ(16a、16b、16c、……)を含むことを特徴とする請求項21に記載の方法。
【請求項26】
前記制御装置(18)が1つ又はそれ以上の方向舵(18a、18b)を含むことを特徴とする請求項21に記載の方法。
【請求項27】
前記制御装置(18)が1つ又はそれ以上のスラスタ(17)を含むことを特徴とする請求項21に記載の方法。
【請求項28】
前記コマンド入力装置(10)は、少なくとも1つの位置指定装置(10a)、ホイール(10b)、速度指定装置(10c)、或いは、所望のロール角度、ピッチ角度、縦揺れ補償などを指定するための装置(10x)を含み、これらの装置は、1つ又はそれ以上の所望の位置(9a)、所望の進路(9b)、所望の速度(9c)又は幾つかの他の所望の変数(9x)、例えば所望のロール角度、所望のピッチ角度、所望の縦揺れ補償等などのためのコマンド信号を与えることを特徴とする請求項21に記載の方法。
【請求項29】
前記遠隔検査室(40)は、検査における前記シミュレートセンサ信号(7’)及びシミュレートコマンド信号(9’)並びに残っていればその残りの実際のセンサ信号(7)及び残りの実際のコマンド信号(9)に基づいて前記制御システム(2)からの前記制御信号(13、13’)が前記船舶(4)の所望の状態をもたらし、これに基づいて前記制御システム(2)が認証されるということを検証するために使用されることを特徴とする請求項21に記載の方法。
【請求項30】
前記制御システム(2)の前記制御アルゴリズム(31)における計算は、質量(m)、船舶の軸方向慣性モーメント、船舶の質量分布、船体の幾何学的形状を決定する船体パラメータを含む船舶の動的パラメータ(5)を使用することを特徴とする請求項21に記載の方法。
【請求項31】
前記センサ(8)からの前記センサ信号(7)の前記制御システム(2)に対する切り離しは、前記信号ライン(12)上のスイッチ(15a)によって行なわれることを特徴とする請求項21に記載の方法。
【請求項32】
前記コマンド入力装置(10)からの前記コマンド信号(9)の前記制御システム(2)に対する切り離しは、前記信号ライン(11)上のスイッチ(15b)によって行なわれることを特徴とする請求項21に記載の方法。
【請求項33】
前記遠隔検査室(40)が陸上に配置され、検査される前記船舶(4a、4b、4c、……)は、前記検査室(40)から遠く離れた距離、一般的には1〜20000kmの距離に配置され、検査される船舶は、港、ドック又は構内に停泊され或いは外洋に位置されていることを特徴とする請求項21に記載の方法。
【請求項34】
故障状況は、その時点で前記センサ信号(7)又は前記コマンド信号(9)の1つ又はそれ以上の選択された信号を切り離して部品の故障をシミュレートすることにより検査され、前記制御信号(13、13’)及び状態信号(19、19’)の形態を成す制御システムの応答は、前記遠隔検査室(40)のロガー(15)に記録されることを特徴とする請求項21に記載の方法。
【請求項35】
故障状況は、前記シミュレートセンサ信号(7’)の選択において乱れを変更し或いは生成することにより、或いは、前記遠隔検査室(40)から前記船舶(4)内の前記制御システム(2)へと送られる前記シミュレートセンサ信号(7’)に対して天候、風、電気的ノイズのような外的な乱れを生成することにより検査され、前記制御信号(13、13’)及び前記状態信号(19、19’)の形態を成す前記制御システム(2)の応答は、前記遠隔検査室(40)内の前記ロガー(15)に記録されることを特徴とする請求項21に記載の方法。
【請求項36】
前記船舶(4)上の前記制御システム(2)のための新たなソフトウェアは、前記遠隔検査室(40)から前記通信ライン(6)を介して送信されることを特徴とする請求項21に記載の方法。
【請求項37】
前記遠隔検査室(40)は、前記制御システム(2)の検査及び検査結果に基づいて、船舶(4)の通常の動作における使用に関して前記制御システム(2)を認可し且つ前記制御システム(2)を認証するために使用されることを特徴とする請求項21に記載の方法。
【請求項38】
船舶(4)における制御システム(2)のための検査システムであって、前記制御システム(2)が前記船舶(4)を制御して監視する検査システムであり、
1つ又はそれ以上のセンサ信号(7)を信号ライン(12)を介して前記制御システム(2)へ送るための前記船舶(4)上の1つ又はそれ以上のセンサ(8)と、
所望の位置、進路、速度(9)等のうちの1つ又はそれ以上をコマンド信号ライン(11)を介して前記制御システム(2)に送る前記船舶(4)上のコマンド入力装置(10)と、
前記センサ信号(7)及び前記コマンド信号(9)に基づいて船舶アクチュエータ(3)への制御信号(13)を計算するとともに、前記制御信号(13)を信号ライン(14)を介して前記アクチュエータ(3)へ送るための制御システム(2)中のアルゴリズム(31)と、
を備える検査システムにおいて、
1つ又はそれ以上のシミュレートセンサ信号(7’)及び/又はシミュレートコマンド信号(9’)を遠隔検査室(40)から前記制御システム(2)へ送るための1つ又はそれ以上の通信ライン(6)と、
船舶(4)における前の状態(50’)、前記制御信号(13、13’)、動的パラメータ(5)に基づく船舶モデル(4’)の新たなセンサ信号(7’)のシミュレーションのためのアルゴリズム(32)を含むシミュレータ(30)と、
を有し、
前記通信ライン(6)は、前記制御信号(13)のうちの前記センサ信号(7、7’)の実際の及び/又はシミュレートされた値又は前記コマンド信号(9,9’)の実際の及び/又はシミュレートされた値に基づいて前記制御システム(2)において連続計算して所望の位置、進路、速度(9)等のうちの少なくとも1つを得るために、前記船舶モデル(4’)の前記新たなシミュレートセンサ信号(7’)を前記制御システム(2)へ送り戻すようになっており、
前記通信ライン(6)は、制御信号(13)の形態を成す前記制御システム(2)からの応答を制御信号(13’)として前記遠隔検査室(40)へ送るようになっていること、
を特徴とする検査システム。
【請求項39】
1つ又はそれ以上の前記センサ信号(7)を前記制御システム(2)への前記信号ライン(12)から切り離すために第1のスイッチ(15a)が設けられていることを特徴とする請求項38に記載の検査システム。
【請求項40】
1つ又はそれ以上の前記コマンド信号(10)を前記制御システム(2)への前記信号ライン(11)から切り離すために第2のスイッチ(15b)が設けられていることを特徴とする請求項38に記載の検査システム。
【請求項41】
1つ又はそれ以上の前記制御信号(13)を前記制御システム(2)からの前記信号ライン(14)から切り離すために第3のスイッチ(15c)が設けられていることを特徴とする請求項38に記載の検査システム。
【請求項42】
前記アクチュエータ(3)への前記制御信号(13)を計算するため、前記船舶(4)の前記動的パラメータ(5)が前記制御システム(2)の前記アルゴリズム(31)内に入ることを特徴とする請求項38に記載の検査システム。
【請求項43】
前記遠隔検査室(40)にはシミュレータ(30)が設けられていることを特徴とする請求項38に記載の検査システム。
【請求項44】
1つ又はそれ以上のシミュレートセンサ信号(7’)を前記遠隔検査室(40)から送信するための前記通信ライン(6)は、前記遠隔検査室(40)側の第1のリアルタイムインタフェース(6a)に接続されるとともに、前記第1のリアルタイムインタフェース(6a)から切断されることを特徴とする請求項38に記載の検査システム。
【請求項45】
前記通信ライン(6)は、船舶(4)側の第2のリアルタイムインタフェース(6b)に接続されるとともに、前記第2のリアルタイムインタフェース(6b)から切断されるようになっており、前記第2のリアルタイムインタフェース(6b)は、前記制御システム(2)への前記信号ライン(11)に対してスイッチ(15a)により接続されることを特徴とする請求項38に記載の検査システム。
【請求項46】
前記遠隔検査室(40)からの前記シミュレートコマンド信号(9’)を前記リアルタイムインタフェース(6b)と前記通信ライン(6)と前記リアルタイムインタフェース(6b)とを介して前記制御システム(2)へ送るためのシミュレートコマンド入力装置(10’)が設けられていることを特徴とする請求項38に記載の検査システム。
【請求項47】
前記遠隔検査室(40)内の遠隔配置されたシミュレータコンピュータ(30R)を使用して、前記シミュレートセンサ信号(7’)及び前記シミュレートコマンド信号(9’)を前記通信ライン(6)を介して前記船舶側の前記ローカルシミュレータ(30L)に対して送信すること、及び、前記ローカルシミュレータコンピュータ(30L)から前記制御信号(13’)を前記通信ライン(6)を介して受信することを含むことを特徴とする請求項44に記載の検査システム。
【請求項48】
前記遠隔検査室(40)内の遠隔配置されたマネージャ(33)を使用して、前記シミュレート状態(50’)の初期値と、前記シミュレートコマンド信号(9’)の時間系列と、海の状態、潮流、風速、風向におけるシミュレート値とを前記通信ライン(6)を介して前記船舶側の前記ローカルシミュレータ(30L)に対して送信すること、及び、前記ローカルシミュレータコンピュータ(30L)から前記制御信号(13’)を前記通信ライン(6)を介して受信することを含み、前記ローカルシミュレータ(30L)が前記制御システム(2)に接続され、これにより、前記制御システムは、前記ローカルシミュレータ(30L)から前記シミュレートセンサ信号(9’)及び前記シミュレートコマンド信号(9’)を取得するとともに、前記制御信号(13’)をローカルシミュレータ(30L)に対して出力することを特徴とする請求項44に記載の検査システム。
【請求項49】
前記制御システム(2)の前記アルゴリズム(31)の全部又は一部は、前記遠隔検査室(40)からの前記通信ライン(6)にわたって変更され、較正され、或いは、交換されることを特徴とする請求項38に記載の検査システム。
【請求項50】
前記制御信号(13)は、1つ又はそれ以上のプロペラ(16)又はスラスタ(17)のシャフト速度(13a、13b)や、方向舵(18)又はスラスタ(17)又は可能であれば他の制御装置における角度(13c)の形態を成す信号(13a、13b、13c)を含むことを特徴とする請求項38に記載の検査システム。
【請求項51】
前記センサ(8)は、
− 前記船舶(4)の位置(7a)を決定するためのGPS受信器(8a)等の位置測定装置(8a)、水中音響位置センサ(8h)、積算加速度センサなど
− 前記船舶(4)の進路(7b)を決定するための進路測定装置(8b)、例えばジャイロコンパス又は幾つかの他のコンパス
− 前記船舶(4)の速度(7c)を決定するための速度センサ(8c)又は1つの積算加速度センサ
− (相対)風速(7d)及び風向(7e)を与えるための風速計(8d、8e)
− ロール角度(7f)を与えるためのロール角度センサ(8f)
− ピッチ角度(7g)を与えるためのピッチ角度センサ(8g)
のうちの1つ又はそれ以上を含むことを特徴とする請求項38に記載の検査システム。
【請求項52】
前記遠隔検査室(4)は、前記センサ信号(7、7’)に対する前記制御システム(2)からの前記制御信号及び状態信号(13’、19’)の形態を成す応答を記録するためのデータロガー(15)を含むことを特徴とする請求項38に記載の検査システム。
【図1】

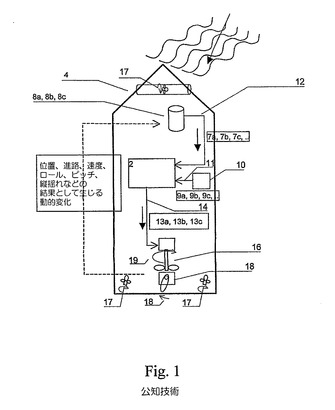
【図2】
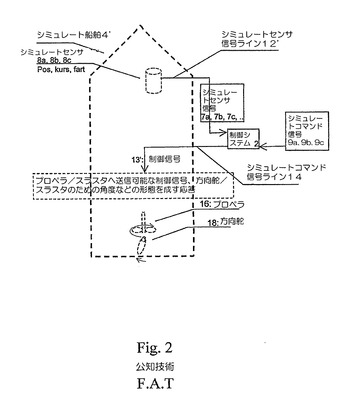
【図3】
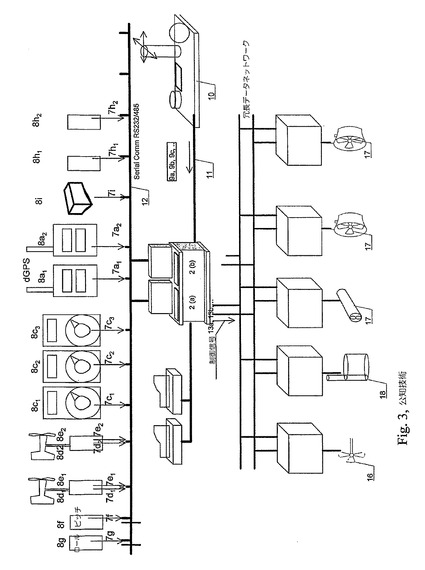
【図4a1】
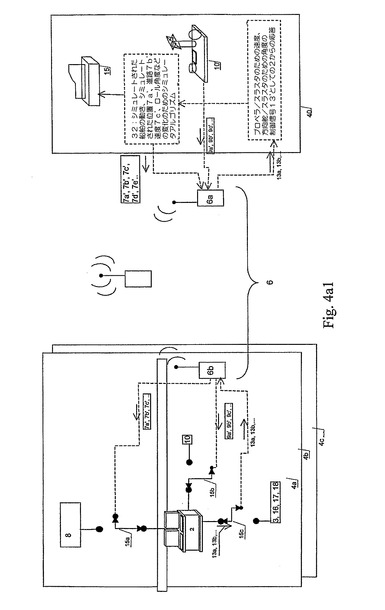
【図4a2】
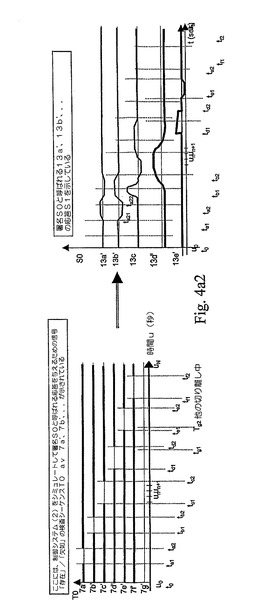
【図4a3】
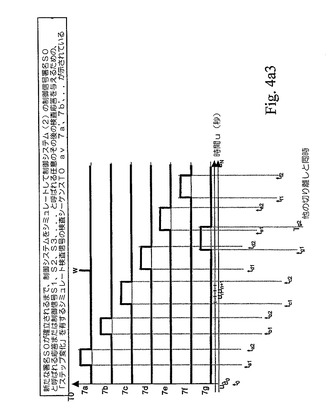
【図4a4】
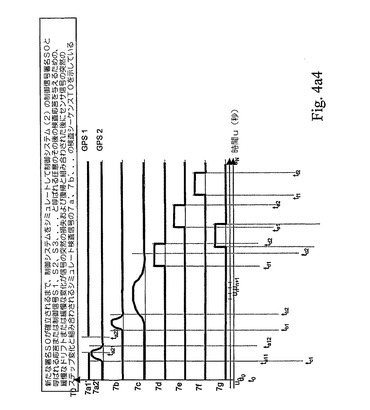
【図4a5】
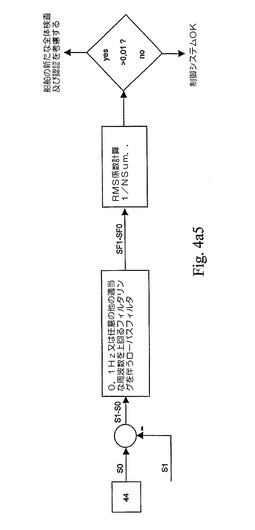
【図4b】
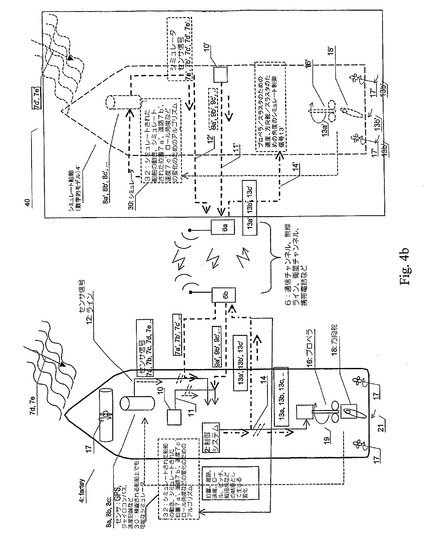
【図4c】
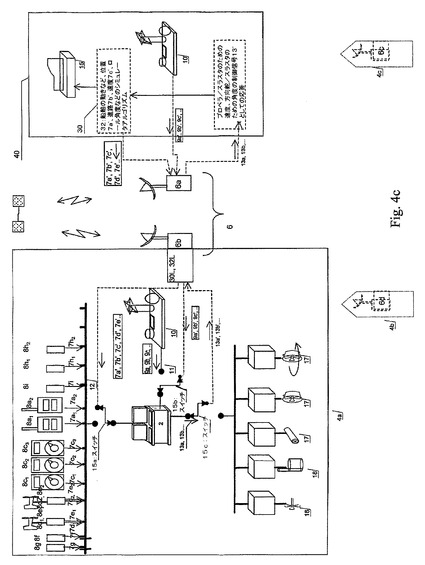
【図5】
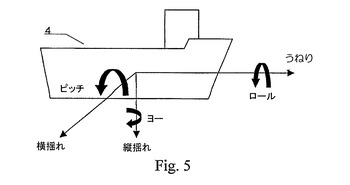
【図6】
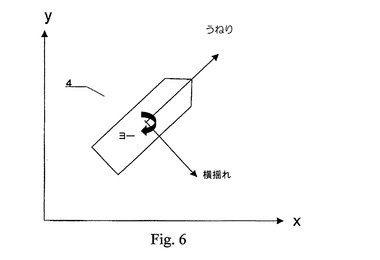
【図7】
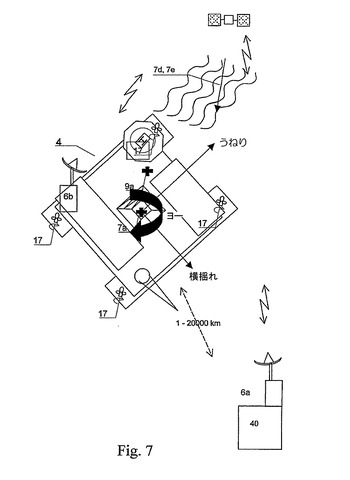
【図8】
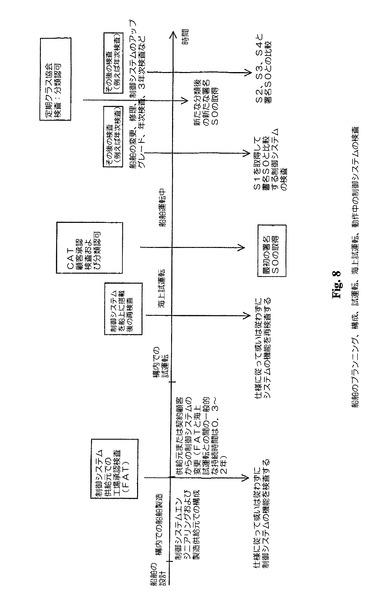
【図9】
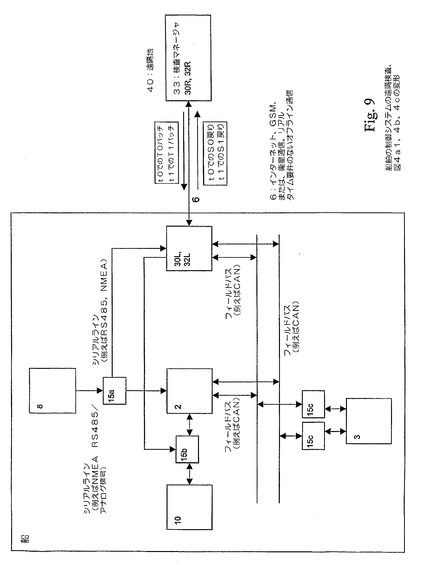
【図10】
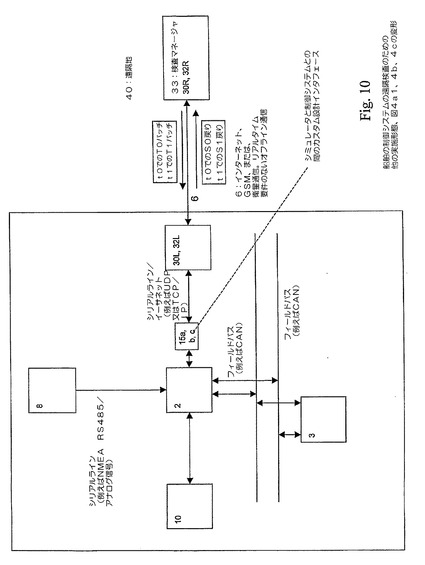
【図2】
【図3】
【図4a1】
【図4a2】
【図4a3】
【図4a4】
【図4a5】
【図4b】
【図4c】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公表番号】特表2007−522470(P2007−522470A)
【公表日】平成19年8月9日(2007.8.9)
【国際特許分類】
【出願番号】特願2006−553074(P2006−553074)
【出願日】平成16年12月14日(2004.12.14)
【国際出願番号】PCT/NO2004/000386
【国際公開番号】WO2005/077754
【国際公開日】平成17年8月25日(2005.8.25)
【出願人】(505249942)マリン・サイバネティクス・アクティーゼルスカブ (5)
【Fターム(参考)】
【公表日】平成19年8月9日(2007.8.9)
【国際特許分類】
【出願日】平成16年12月14日(2004.12.14)
【国際出願番号】PCT/NO2004/000386
【国際公開番号】WO2005/077754
【国際公開日】平成17年8月25日(2005.8.25)
【出願人】(505249942)マリン・サイバネティクス・アクティーゼルスカブ (5)
【Fターム(参考)】
[ Back to top ]