
船舶の推進装置の制御
【課題】OLP方式を用いた二軸船において、推進性能を悪化させることなく船舶の操縦性を向上させる。
【解決手段】推進装置は、左舷プロペラ20と、船長方向における左舷プロペラ20の前方又は後方の位置で、翼の一部が左舷プロペラ20の翼とオーバーラップするように設けられた右舷プロペラ10と、左舷プロペラ20を駆動する左舷駆動部22、32と、右舷プロペラ10を駆動する右舷駆動部12、31と、左舷プロペラ20及び右舷プロペラ10の駆動に関連する情報を検知する検知部40、50と、検知部40、50による検知結果に基づいて、左舷プロペラ20及び右舷プロペラ10の各々についてスラスト量を推定する制御部60とを具備する。制御部60は、推定結果に基づいて、左舷のスラストと右舷のスラストとが同程度になるように、左舷駆動部22、32及び右舷駆動部12、31を制御する。
【解決手段】推進装置は、左舷プロペラ20と、船長方向における左舷プロペラ20の前方又は後方の位置で、翼の一部が左舷プロペラ20の翼とオーバーラップするように設けられた右舷プロペラ10と、左舷プロペラ20を駆動する左舷駆動部22、32と、右舷プロペラ10を駆動する右舷駆動部12、31と、左舷プロペラ20及び右舷プロペラ10の駆動に関連する情報を検知する検知部40、50と、検知部40、50による検知結果に基づいて、左舷プロペラ20及び右舷プロペラ10の各々についてスラスト量を推定する制御部60とを具備する。制御部60は、推定結果に基づいて、左舷のスラストと右舷のスラストとが同程度になるように、左舷駆動部22、32及び右舷駆動部12、31を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、船舶の推進装置の制御に関する。
【背景技術】
【0002】
船舶の推進装置の一例として、一機一軸(一機の主機と一基のプロペラ)の方式、及び二機二軸(二機の主機と二基のプロペラ)の方式が知られている。一般商船の推進装置としては、これら一機一軸方式、又は二機二軸方式を採用することが多い。それぞれ、前者を採用した船舶は一軸船、後者を採用した船舶は二軸船とも呼ばれている。
【0003】
また、近年の船舶の大型化に伴い、一軸船ではプロペラの荷重度の増加に伴う推進効率の低下、キャビテーション範囲の拡大に伴う船体振動の増加及びエロージョンの発生が問題となるケースがある。それら問題は船舶を二軸船とすることで解決できることが知られている。二軸船とすると、一基当たりのプロペラ荷重度が低減され、プロペラ効率が向上し、キャビテーション発生範囲が低減できるからである。
【0004】
船尾に二基のプロペラを配置する例としては、オーバーラッピングプロペラ(OLP;Overlapping Propellers)の方式、インターロックプロペラの方式、及び、プロペラを左右並列する方式などがある。OLP方式では、二基のプロペラを前後にずらして配置し、船尾から見た場合に二基のプロペラの一部が重なるように配置する。OLP方式を採用することで推進性能が一軸船から5〜10%程度改善できる。また、インターロックプロペラ方式では、一方のプロペラの翼と翼との間に他方のプロペラの翼が入るように配置する。プロペラを左右並列する方式では、プロペラを船長方向の同じ位置に並べて配置する。
【0005】
ここで、一軸船型の船尾構造に二基のプロペラを配置する際のプロペラの位置関係は、船体中心線付近の遅い流れやビルジ渦のような船尾の縦渦との関係から船体中心近傍に配置することが好ましい。船尾において、通常の一軸船のプロペラの位置では船体中心線に対称な一組の内回りに回転するビルジ渦のような遅い流れの縦渦が発生する。プロペラは流れの遅い場所で作動する方が効率が良くなるため、その縦渦付近にてプロペラを回転させ、船体中心線付近の遅い流れや縦渦を回収することで、推進効率を向上させることができるからである。OLP方式の場合では、船体中心近傍の縦渦を効率良く回収して推進性能向上が図られるよう、プロペラ回転方向は外回りが採用されることが多い。
【0006】
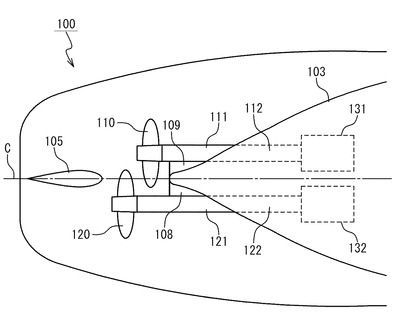
例えば、特許文献1(WO2006/095774号公報)には、一軸船型の船尾構造にOLPを採用した場合の技術が記載されている。図1は、特許文献1の二軸船の船尾の構成の一部を示す模式図である。ただし、図1は二軸船の船尾を船底側から見た模式図である。また、この図では、二軸船100は、一軸船型の船尾を有し、船尾に右舷プロペラ110、左舷プロペラ120、及び舵105を備えている。右舷プロペラ110は、右舷船尾管111内に挿通されている右舷プロペラ軸112の一端に接続されている。右舷プロペラ軸112は、他端を船体内部の右舷主機131に接続されている。右舷主機131は、右舷プロペラ軸112を介して右舷プロペラ110を回転させる。また、左舷プロペラ120は、右舷プロペラ110と同様に、左舷船尾管121内に挿通されている左舷プロペラ軸122の一端に接続されている。左舷プロペラ軸122は、他端を船体内部の左舷主機132に接続されている。左舷主機132は左舷プロペラ軸122を介して左舷プロペラ120を回転させる。また、右舷船尾管111と船尾船体103との間、及び左舷船尾管121と船尾船体103との間はそれぞれブラケットフィン108、109にて結合されている。また、舵105は、右舷プロペラ110及び左舷プロペラ120の後方、船体中心線C上に設けられている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】WO2006/095774号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかし、OLP方式を用いた二軸船の場合、前方プロペラは船体中心近傍の遅い流れの中で作動し、後方プロペラは前方プロペラによって加速された早い流れ及び船体中心近傍の遅い流れの中を交互に通過する。例えば、図1の場合では、前方の右舷プロペラ110は、船体中心線Cの近傍の遅い流れの中で作動する。一方、後方の左舷プロペラ120は、前方の右舷プロペラ110によって加速された早い流れ(主に右舷側)及び船体中心線Cの近傍の遅い流れ(主に左舷側)の中を交互に通過する。したがって、左右舷のプロペラの作動状態が異なるため、左右両舷それぞれのプロペラの発生する推力が異なる(前方プロペラの推力が大きくなる)ことになる。このような場合、航行時には、船首方位を一定に保つために当て舵量を大きく取る必要があり、操縦性が悪く、推進性能も悪化すると考えられる。
【0009】
そこで、本発明の目的は、OLP方式を用いた二軸船において、推進性能を悪化させることなく船舶の操縦性を向上させることが可能な推進装置、それを用いた船舶、及び船舶の推進方法を提供することである。
【課題を解決するための手段】
【0010】
以下に、発明を実施するための形態で使用される番号・符号を用いて、課題を解決するための手段を説明する。これらの番号・符号は、特許請求の範囲の記載と発明を実施するための形態との対応関係を明らかにするために括弧付きで付加されたものである。ただし、それらの番号・符号を、特許請求の範囲に記載されている発明の技術的範囲の解釈に用いてはならない。
【0011】
本発明の推進装置は、左舷プロペラ(20、20a)と、右舷プロペラ(10、10a)と、左舷駆動部(22、32、32a、92)と、右舷駆動部(12、31、31a、91)と、検知部(40、50、80)と、制御部(60)とを具備する。右舷プロペラ(10、10a)は、船長方向における左舷プロペラ(20、20a)の前方又は後方の位置で、翼の一部が左舷プロペラ(20、20a)の翼とオーバーラップするように設けられている。左舷駆動部(22、32、32a、92)は、左舷プロペラ(20、20a)を駆動する。右舷駆動部(12、31、31a、91)は、右舷プロペラ(10、10a)を駆動する。検知部(40、50、80)は、左舷プロペラ(20、20a)及び右舷プロペラ(10、10a)の駆動に関連する情報を検知する。制御部(60)は、検知部(40、50、80)による検知結果に基づいて、左舷プロペラ(20、20a)及び右舷プロペラ(10、10a)の各々についてスラスト量を推定する。制御部(60)は、推定結果に基づいて、左舷のスラストと右舷のスラストとが同程度になるように、左舷駆動部(22、32、32a、92)及び右舷駆動部(12、31、31a、91)を制御する。
【0012】
本発明では、左舷プロペラ(20、20a)と右舷プロペラ(10、10a)とがオーバーラップしたOLP方式であっても、検知部(40、50、80)による検知結果に基づいて、左舷プロペラ(20、20a)及び右舷プロペラ(10、10a)の各々について現在のスラスト量を推定することができる。そして、それらスラスト量の推定値に基づいて、当該スラスト量が同程度になるように、左舷駆動部(22、32、32a、92)及び右舷駆動部(12、31、31a、91)を制御することができる。例えば、左右両プロペラ(20、20a、10、10a)の回転数や翼角を制御することができる。それにより、左右両プロペラ(20、20a、10、10a)におけるスラスト量を自動的に同程度に制御し維持できるので、船首方位を一定に保つための当て舵量を極めて小さくすることができる。その結果、操縦性を向上することができ、推進性能の悪化も防止することができる。
【0013】
上記の推進装置において、制御部(60)は、左舷駆動部(22、32、32a)及び右舷駆動部(12、31、31a)を介して、左舷のスラストと右舷のスラストとが同程度になるように、左舷プロペラ(20)及び右舷プロペラ(10)の回転数を制御する。
本発明では、左舷プロペラ(20)及び右舷プロペラ(10)の回転数の操作によりスラスト量の制御を行うので、操作が容易であり好ましい。
【0014】
上記の推進装置において、左舷駆動部(22、32、32a)は、船尾船体(3)から後方に伸び、左舷プロペラ(20)に接続された左舷プロペラ軸(22)と、左舷プロペラ軸(22)を駆動する左舷主機部(32、32a)とを備える。右舷駆動部(12、31、31a)は、船尾船体(3)から後方に伸び、右舷プロペラ(10)に接続された右舷プロペラ軸(12)と、右舷プロペラ軸を駆動する右舷主機部(31、31a)とを備える。制御部(60)は、左舷主機部(32、32a)及び右舷主機部(31、31a)による左舷プロペラ軸(22)及び右舷プロペラ軸(12)の回転数の制御により、左舷プロペラ(20)及び右舷プロペラ(10)の回転数を制御する。
本発明では、左舷プロペラ(20)及び右舷プロペラ(10)の回転数の操作を、左舷主機部(32)及び右舷主機部(31)による左舷プロペラ軸(22)及び右舷プロペラ軸(12)の回転数の制御で行うので、抵抗を増加させるような機器を用いる必要が無く好ましい。
【0015】
上記の推進装置において、左舷プロペラ(20a)及び右舷プロペラ(10a)は、可変ピッチプロペラである。制御部(60)は、左舷駆動部(22、32a、92)及び右舷駆動部(12、31a、91)を介して、左舷のスラストと右舷のスラストとが同程度になるように、左舷プロペラ(20a)及び右舷プロペラ(10a)の翼角を制御する。
本発明では、可変ピッチプロペラを有する場合には、左舷プロペラ(20a)及び右舷プロペラ(10a)の翼角の操作によりスラスト量の制御を行うので、操作が容易であり好ましい。
【0016】
上記の推進装置において、左舷駆動部(22、32a、92)は、船尾船体(3)から後方に伸び、左舷プロペラ(20a)に接続された左舷プロペラ軸(22)と、左舷プロペラ軸(22)を介して、左舷プロペラ(20a)としての可変ピッチプロペラの翼角を制御する左舷翼角駆動部(92)とを備える。右舷駆動部(12、31a、91)は、船尾船体(3)から後方に伸び、右舷プロペラ(10a)に接続された右舷プロペラ軸(12)と、右舷プロペラ軸(12)を介して、右舷プロペラ(10a)としての可変ピッチプロペラの翼角を制御する右舷翼角駆動部(91)とを備える。制御部(60)は、左舷翼角駆動部(92)及び右舷翼角駆動部(91)の制御により、左舷プロペラ(20a)及び右舷プロペラ(10a)の翼角を制御する。
本発明では、左舷プロペラ(20a)及び右舷プロペラ(10a)の翼角の操作を、プロペラ軸(22、12)を介して翼角を制御する翼角駆動部(92、91)を用いて行うので、抵抗を増加させるような機器を用いる必要が無く好ましい。
【0017】
上記の推進装置において、検知部(40)は、左舷プロペラ軸(22)に設けられた左舷軸馬力検出部(42)と、右舷プロペラ軸(12)に設けられた右舷軸馬力検出部(41)とを含む。制御部(60)は、左舷軸馬力検出部(42)が測定した左舷プロペラ軸(22)の左舷軸馬力と、右舷軸馬力検出部(41)が測定した右舷プロペラ軸(12)の右舷軸馬力とに基づいて、左舷プロペラ(20、20a)の左舷スラスト量と、右舷プロペラ(10、10a)の右舷スラスト量とを推定する。
本発明において、左舷軸馬力検出部(42)及び右舷軸馬力検出部(41)を用いることは、装着や測定が容易であり好ましい。
【0018】
上記の推進装置において、検知部(50)は、左舷駆動部(32)に供給される燃料の消費量を計測する左舷側燃料計(52)と、右舷駆動部(31)に供給される燃料の消費量を計測する右舷側燃料計(51)とを含む。制御部(60)は、左舷側燃料計(52)が測定した左舷駆動部(32)の左舷燃料消費量と、右舷側燃料計(51)が測定した右舷駆動部(31)の右舷側燃料消費量とに基づいて、左舷プロペラ(20、20a)の左舷スラスト量と、右舷プロペラ(10、10a)の右舷スラスト量とを推定する。
本発明において、左舷側燃料計(52)及び右舷側燃料計(51)を用いることは、装着や測定が容易であり好ましい。
【0019】
上記の推進装置において、検知部(80)は、左舷駆動部(32a)に供給される電力の出力電圧を計測する左舷側電圧計(82)と、右舷駆動部(31a)に供給される電力の出力電圧を計測する右舷側電圧計(81)とを含む。制御部(60)は、左舷側電圧計(82)が測定した左舷駆動部(32a)の左舷出力電圧と、右舷側電圧計(81)が測定した右舷駆動部(31a)の右舷側出力電圧とに基づいて、左舷プロペラ(20、20a)の左舷スラスト量と、右舷プロペラ(10、10a)の右舷スラスト量とを推定する。
本発明において、電気推進船の場合には、左舷側電圧計(82)及び右舷側電圧計(81)を用いることは、装着や測定が容易であり好ましい。
【0020】
上記の推進装置において、船尾船体(3)は、一軸船型の船尾構造を有する。
本発明により、一軸船型の船尾構造を有する場合には、OLP方式とすることで船体中心付近の遅い流れを効率的に回収でき好ましい。
【0021】
本発明の船舶は、上記各段落のいずれかに記載の推進装置を有する。
本発明により、上記各段落に記載の特徴を有する推進装置を船舶(1)に対して適用することで、その作用効果を特に顕著に奏することができる。
【0022】
本発明の船舶の推進方法は、制御部(60)が、検知部(40、50、80)が検知した左舷プロペラ(20、20a)及び右舷プロペラ(10、10a)の駆動に関連する情報を取得するステップと、制御部(60)が、検知部(40、50、80)による検知結果に基づいて、左舷プロペラ(20、20a)及び右舷プロペラ(10、10a)の各々についてスラスト量を推定するステップと、制御部(60)が、推定結果に基づいて、左舷のスラストと右舷のスラストとが同程度になるように、左舷駆動部(22、32、32a、92)及び右舷駆動部(12、31、31a、91)を制御するステップとを具備する。ただし、船舶は、左舷プロペラ(20、20a)と、船長方向における左舷プロペラ(20、20a)の前方又は後方の位置で、翼の一部が左舷プロペラ(20、20a)の翼とオーバーラップするように設けられた右舷プロペラ(10、10a)と、左舷プロペラ(20、20a)を駆動する左舷駆動部(22、32、32a、92)と、右舷プロペラ(10、10a)を駆動する右舷駆動部(12、31、31a、91)と、左舷プロペラ(20、20a)及び右舷プロペラ(10、10a)の駆動に関連する情報を検知する検知部(40、50、80)と、制御部(60)とを備える。
【0023】
上記の船舶の推進方法において、制御するステップは、制御部(60)が、左舷駆動部(22、32、32a)及び右舷駆動部(12、31、31a)を介して、左舷のスラストと右舷のスラストとが同程度になるように、左舷プロペラ(20)及び右舷プロペラ(10)の回転数を制御するステップを備える。
【0024】
上記の船舶の推進方法において、制御するステップは、制御部(60)が、左舷駆動部(22、32a、92)及び右舷駆動部(12、31a、91)を介して、左舷のスラストと右舷のスラストとが同程度になるように、可変ピッチプロペラである左舷プロペラ(20a)及び右舷プロペラ(10a)の翼角を制御するステップを備える。
【0025】
上記の船舶の推進方法において、推定するステップは、制御部(60)が、左舷プロペラ軸(22)に設けられた左舷軸馬力検出部(42)が測定した左舷プロペラ軸(22)の左舷軸馬力と、右舷プロペラ軸(12)に設けられた右舷軸馬力検出部(41)が測定した右舷プロペラ軸(12)の右舷軸馬力とに基づいて、左舷プロペラ(20、20a)の左舷スラスト量と、右舷プロペラ(10、10a)の右舷スラスト量とを推定するステップを備える。
【0026】
上記の船舶の推進方法において、推定するステップは、制御部(60)が、左舷駆動部(32)に供給される燃料の消費量を計測する左舷側燃料計(52)が測定した左舷駆動部(32)の左舷燃料消費量と、右舷駆動部(31)に供給される燃料の消費量を計測する右舷側燃料計(51)が測定した右舷駆動部(31)の右舷側燃料消費量とに基づいて、左舷プロペラ(20、20a)の左舷スラスト量と、右舷プロペラ(10、10a)の右舷スラスト量とを推定するステップを備える。
【0027】
上記の船舶の推進方法において、推定するステップは、制御部(60)が、左舷駆動部(32a)に供給される電力の出力電圧を計測する左舷側電圧計(82)が測定した左舷駆動部(32a)の左舷出力電圧と、右舷駆動部(31a)に供給される電力の出力電圧を計測する右舷側電圧計(81)が測定した右舷駆動部(31a)の右舷側出力電圧とに基づいて、左舷プロペラ(20、20a)の左舷スラスト量と、右舷プロペラ(10、10a)の右舷スラスト量を推定するステップを備える。
【0028】
本発明のプログラムは、上記各段落のいずれかに記載の船舶の推進方法をコンピュータに実行させるプログラムである。
【発明の効果】
【0029】
本発明により、OLP方式を用いた二軸船において、推進性能を悪化させることなく船舶の操縦性を向上することが可能となる。
【図面の簡単な説明】
【0030】
【図1】図1は、特許文献1の二軸船の船尾の構成の一部を示す模式図である。
【図2】図2は、本発明の第1の実施の形態に係る船舶の推進装置の一部の構成を示す模式図である。
【図3】図3は、本発明の第2の実施の形態に係る船舶の推進装置の一部の構成を示す模式図である。
【図4】図4は、本発明の第3の実施の形態に係る船舶の推進装置の一部の構成を示す模式図である。
【図5】図5は、本発明の第4の実施の形態に係る船舶の推進装置の一部の構成を示す模式図である。
【発明を実施するための形態】
【0031】
以下、本発明の推進装置、それを用いた船舶、及び船舶の推進方法の実施の形態について添付図面を参照して説明する。
【0032】
(第1の実施の形態)
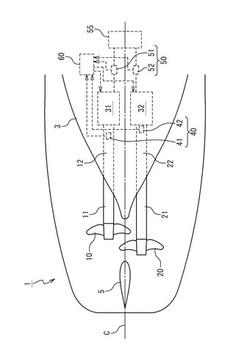
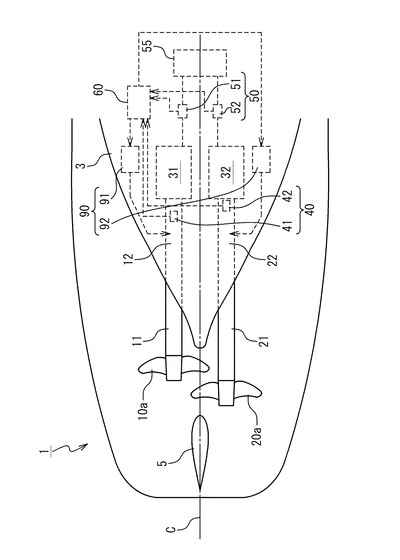
まず、本発明の第1の実施に係る船舶の推進装置の構成について説明する。図2は、本発明の第1の実施の形態に係る船舶の推進装置の一部の構成を示す模式図である。ただし、図2は船舶の推進装置を船底側から見た模式図である。ここでは、船舶として、一軸船型の船尾構造を有するOLP方式の二軸船1を例に説明する。図2に示されるように、二軸船1は、右舷プロペラ10、右舷プロペラ軸管11、右舷プロペラ軸12、右舷主機31、左舷プロペラ20、左舷プロペラ軸管21、左舷プロペラ軸22、右舷主機32、舵5、第1検知部40、第2検知部50、制御部60、燃料供給装置55を備えている。
【0033】
右舷プロペラ10は、船体の船尾の下方部分である船尾船体3の右舷に設けられた固定ピッチプロペラまたは可変ピッチプロペラである。右舷プロペラ10は、右舷プロペラ軸管11内に挿入されている右舷プロペラ軸12の一端に接続されている。右舷プロペラ軸12は、他端を船体内部の右舷主機31に接続されている。右舷主機31は例えば、ディーゼルエンジンである。右舷主機31は、燃料供給装置55(例示:燃料タンク)から燃料(例示:重油)の供給を受け、右舷プロペラ軸12を介して右舷プロペラ10を回転させる。右舷プロペラ軸12及び右舷主機31は、右舷プロペラ10を駆動する右舷駆動部と見ることができる。
【0034】
また、同様に、左舷プロペラ20は、船尾船体3の左舷に設けられた固定ピッチプロペラまたは可変ピッチプロペラである。左舷プロペラ20は、左舷プロペラ軸管21内に挿入されている左舷プロペラ軸22の一端に接続されている。左舷プロペラ軸22は、他端を船体内部の左舷主機32に接続されている。左舷主機32は例えば、ディーゼルエンジンである。左舷主機32は、燃料供給装置55から燃料(例示:重油)の供給を受け、左舷プロペラ軸22を介して左舷プロペラ20を回転させる。左舷プロペラ軸22及び左舷主機32は、左舷プロペラ20を駆動する左舷駆動部と見ることができる。
【0035】
右舷プロペラ軸管11及び左舷プロペラ軸管21は、それぞれ右舷プロペラ軸12及び左舷プロペラ軸22を保護し、支持するための外筒(管)であり、ボッシングに例示される。ただし、本実施の形態はそれに限定されず、どのような形態のものでもよい。
【0036】
右舷プロペラ10は、船長方向における左舷プロペラ20の前方又は後方の位置で、翼の一部が左舷プロペラ20の翼とオーバーラップするように設けられている(OLP方式)。また、右舷プロペラ10と左舷プロペラ20とは、船体中心線Cに対して対称な位置に設けられている。図2の例では、右舷プロペラ10は、船長方向における左舷プロペラ20の前方に設けられた場合を示している。ただし、本実施の形態はこの例に限定されるものではなく、右舷プロペラ10が左舷プロペラ20の後方の場合についても、同様に適用が可能である。
【0037】
舵5は、右舷プロペラ10及び左舷プロペラ20の後方、船体中心線C上に設けられている。
【0038】
第1検知部40及び第2検知部50は、左舷プロペラ20及び右舷プロペラ10の駆動に関連する情報を検知する。各プロペラの駆動に関連する情報とは、制御部60が左舷プロペラ20及び右舷プロペラ10の各々についてスラスト量を推定するために必要な情報であり、主機が発生するエネルギーやプロペラ軸が伝達するエネルギー又はそれに対応する(関連付けられる)数値に例示される。より具体的には、プロペラ軸の軸馬力や主機の燃料消費量に例示される。図2の例では、第1検知部40及び第2検知部50のいずれか一方を用いても良いし、両方を用いても良い。また、更に多くの検知部を有していても良い。
【0039】
第1検知部40は、図2の例では、主機からプロペラに供給される伝達馬力を計測する軸馬力計であり、例えば、右舷軸馬力検出部41と左舷軸馬力検出部42とを備える。右舷軸馬力検出部41は、右舷プロペラ軸12のねじれを測定して、そのねじれから右舷プロペラ軸12の軸馬力を算出する。左舷軸馬力検出部42は、左舷プロペラ軸22のねじれを測定して、そのねじれから左舷プロペラ軸22の軸馬力を算出する。各プロペラ軸の軸馬力は制御部60へ出力される。
【0040】
第2検知部50は、図2の例では、燃料供給装置55から主機へ供給される燃料の消費量(供給量)を計測する燃料計であり、例えば、右舷側燃料計51と左舷側燃料計52とを備える。右舷側燃料計51は、右舷主機31に供給される燃料の消費量(供給量)を計測する。左舷側燃料計52は、左舷主機32に供給される燃料の消費量(供給量)を計測する。燃料の消費量(供給量)は制御部60へ出力される。右舷側燃料計51と左舷側燃料計52は、燃料の単位時間当たりの流量を示す燃料流量計や燃料の積算消費量を示す積算燃料流量計に例示される。
【0041】
制御部60は、情報処理機能を有する装置であり、マイクロコンピュータに例示される。制御部60の以下の動作は、例えば、コンピュータにインストールされたプログラムにより実行することができる。制御部60は、第1検知部40や第2検知部50から出力された検知結果に基づいて、左舷プロペラ20及び右舷プロペラ10の各々についてスラスト量を推定する。例えば、制御部60は、左舷軸馬力検出部42が測定した左舷プロペラ軸22の左舷軸馬力と、右舷軸馬力検出部計41が測定した右舷プロペラ軸12の右舷軸馬力とに基づいて、左舷プロペラ20の左舷スラスト量と、右舷プロペラ10の右舷スラスト量とを推定する。あるいは、制御部60は、左舷側燃料計52が測定した左舷主機32の左舷燃料消費量と、右舷側燃料計51が測定した右舷主機31の右舷側燃料消費量とに基づいて、左舷プロペラ20の左舷スラスト量と、右舷プロペラ10の右舷スラスト量とを推定する。更に、制御部60は、軸馬力及び燃料消費量の両方を用いてスラスト量を推定しても良い。
【0042】
ここで、軸馬力及び燃料消費量の少なくとも一方からスラスト量を推定する方法としては、以下のような方法が考えられる。実験やシミュレーションなどから軸馬力及び燃料消費量の少なくとも一方とスラスト量との関係を示すテーブル(左舷用、右舷用)を予め求めておき、測定値に基づいてテーブルを参照してスラスト量を推定する方法が考えられる。また、実験やシミュレーションなどから軸馬力及び燃料消費量の少なくとも一方とスラスト量との関係を示す数式(左舷用、右舷用)を予め算出しておき、測定値をその数式に代入してスラスト量を推定する方法が考えられる。テーブルや数式は例えば制御部60の記憶部に格納されている。
【0043】
制御部60は、上述された推定結果に基づいて、左舷のスラストと右舷のスラストとが同程度になるように、左舷主機32及び右舷主機31を制御する。例えば、制御部60は、左舷主機32及び右舷主機31のうち、スラスト量の大きいプロペラ側の主機についてエンジン(プロペラ軸)の回転数を低下させ、及び/又は、スラスト量の小さいプロペラ側の主機についてエンジン(プロペラ軸)の回転数を増加させる制御が考えられる。あるいは、左舷主機32及び右舷主機31のうち、スラスト量の大きいプロペラ側のプロペラ軸について調速機(図示されず:左舷駆動部/右舷駆動部に含まれる)によりプロペラ軸の回転数を低下させ、及び/又は、スラスト量の小さいプロペラ側のプロペラ軸について調速機によりプロペラ軸の回転数を増加させる制御が考えられる。
【0044】
また、上記制御における制御量(エンジン回転数、プロペラ軸回転数)については、例えば、目標船速に対応した目標スラスト量と推定されたスラスト量との差を算出して、PID制御(左舷用、右舷用、係数等については事前に実験やシミュレーションで取得)により、両主機や両調速機に対する制御量を算出する方法が考えられる。あるいは、前方側のプロペラ(図2の場合、右舷プロペラ10)のスラスト量を目標値として、PID制御により、後方側のプロペラ(左舷プロペラ20)の主機や調速機に対する制御量を算出する方法や、その逆の方法が考えられる。また、前方側のプロペラと後方側のプロペラのスラスト量との平均値等を目標値とする方法も考えられる。
【0045】
以上のような構成により、左舷プロペラ20及び右舷プロペラ10の回転数をそれぞれ増加又は低下させることができ、左舷プロペラ20の左舷スラスト量と右舷プロペラ10の右舷スラスト量とを同程度にすることができる。
【0046】
次に、本発明の第1の実施に係る船舶(推進装置)の動作の一例について説明する。
ここでは、第1検知部40を用いて軸馬力の検知を行い、予め準備されたテーブルに基づいてスラスト量の推定を行い、エンジン回線数でスラスト量を制御する例について説明する。ただし、本実施の形態はこの例に限定されるものではなく、他の場合であっても同様に動作可能である。例えば、第2検知部50を単独で又は同時に用いても良いし、予め準備した関数を用いても良い。
【0047】
左舷主機32及び右舷主機31の動作により、それぞれ左舷プロペラ軸22及び右舷プロペラ軸12を介して、それぞれ左舷プロペラ20及び右舷プロペラ10が回転している(ステップS1)。このとき、左舷プロペラ20及び右舷プロペラ10の各スラスト量が異なっている可能性がある。
【0048】
そのとき、右舷軸馬力検出部41は、右舷プロペラ軸12のねじれを測定し、そのねじれから右舷プロペラ軸12の軸馬力を算出して、制御部60へ出力する。同様に、左舷軸馬力検出部42は、左舷プロペラ軸22のねじれを測定し、そのねじれから左舷プロペラ軸22の軸馬力を算出して、制御部60へ出力する(ステップS2)。
【0049】
制御部60は、左舷プロペラ軸22の左舷軸馬力と、右舷プロペラ軸12の右舷軸馬力とを、左舷軸馬力検出部42及び右舷軸馬力検出部計41から取得する(ステップS3)。そして、制御部60は、取得した左舷プロペラ軸22の左舷軸馬力と、右舷プロペラ軸12の右舷軸馬力とに基づいて、予め準備された軸馬力とスラスト量との関係を示すテーブルを参照して、左舷プロペラ20の左舷スラスト量と、右舷プロペラ10の右舷スラスト量とを推定する(ステップS4)。
【0050】
制御部60は、上述された推定結果に基づいて、左舷のスラストと右舷のスラストとが同程度になるように、左舷主機32及び右舷主機31のうち、スラスト量の大きいプロペラ側の主機についてエンジンの回転数を低下させ、及び/又は、スラスト量の小さいプロペラ側の主機についてエンジンの回転数を増加させる制御を行う(ステップS5)。
【0051】
その後、船舶の運航を行いつつ、ステップS2〜S5を繰り返すことで、二軸船1を安定的に操作することができる。それにより、当て舵量を低減することができる。
【0052】
以上に示されるように、本実施の形態により、OLP方式を用いた二軸船において、推進性能を悪化させることなく船舶の操縦性を向上させることが可能となる。
【0053】
(第2の実施の形態)
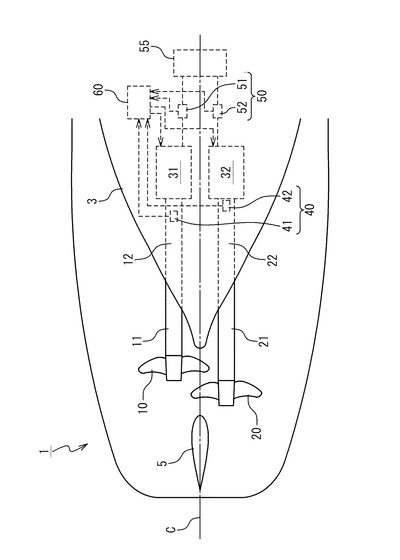
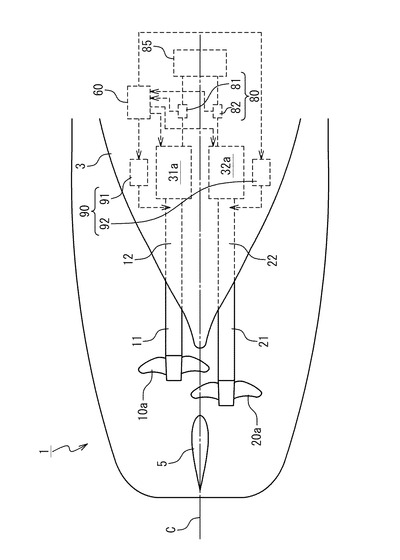
次に、本発明の第2の実施に係る船舶の推進装置の構成について説明する。図3は、本発明の第2の実施の形態に係る船舶の推進装置の一部の構成を示す模式図である。ただし、図3は船舶の推進装置を船底側から見た模式図である。ここでは、船舶として、一軸船型の船尾構造を有するOLP方式の二軸船1を例に説明する。図3に示されるように、二軸船1は、右舷プロペラ10、右舷プロペラ軸管11、右舷プロペラ軸12、右舷主機31a、左舷プロペラ20、左舷プロペラ軸管21、左舷プロペラ軸22、右舷主機32a、舵5、第3検知部80、制御部60、電力供給装置85を備えている。
【0054】
本実施の形態では、二軸船1が電気推進船であり右舷主機32a及び右舷主機31aがエンジンではなく電気モータである点、それゆえに電力供給装置85の出力電圧を検出する第3検知部80を用いることができる点で第1の実施の形態と異なる。
【0055】
まず、右舷プロペラ軸12は、他端を船体内部の右舷主機31aに接続されている。右舷主機31aは例えば、電気モータである。右舷主機31aは、電力供給装置85(例示:発電機)から電力の供給を受け、右舷プロペラ軸12を介して右舷プロペラ10を回転させる。右舷プロペラ軸12及び右舷主機31aは、右舷プロペラ10を駆動する右舷駆動部と見ることができる。その他の構成・機能などは、第1の実施の形態と同様である。同様に、左舷プロペラ軸22は、他端を船体内部の左舷主機32aに接続されている。左舷主機32aは例えば、電気モータある。左舷主機32aは、電力供給装置85から電力の供給を受け、左舷プロペラ軸22を介して左舷プロペラ20を回転させる。左舷プロペラ軸22及び左舷主機32は、左舷プロペラ20を駆動する左舷駆動部と見ることができる。その他の構成・機能などは、第1の実施の形態と同様である。
【0056】
第3検知部80は、左舷プロペラ20及び右舷プロペラ10の駆動に関連する情報(制御部60が左舷プロペラ20及び右舷プロペラ10の各々についてスラスト量を推定するために必要な情報)として、主機に供給される電力(電流、電圧)を検出する。第3検知部80は、図3の例では、主機に電力供給する電力供給装置85の出力電圧を計測する電圧計であり、例えば、右舷側電圧計81と左舷側電圧計82とを備える。右舷側電圧計81は、右舷主機31aへの出力電圧を測定して、制御部60へ出力する。左舷側電圧計82は、左舷主機32aへの出力電圧を測定して、制御部60へ出力する。
【0057】
制御部60は、例えば、左舷側電圧計82が測定した左舷主機32a用の出力電圧と、右舷側電圧計81が測定した右舷主機31a用の出力電圧とに基づいて、左舷主機32a及び右舷主機31aの馬力に換算する。そして、換算された左舷の馬力及び右舷の馬力に基づいて、左舷プロペラ20の左舷スラスト量と、右舷プロペラ10の右舷スラスト量とを推定する。その他の構成・機能などは、第1の実施の形態と同様である。
【0058】
ここで、出力電圧からスラスト量を推定する方法としては、以下のような方法が考えられる。実験やシミュレーションなどから出力電圧から換算された馬力とスラスト量との関係を示すテーブル(左舷用、右舷用)を予め求めておき、測定値に基づいてテーブルを参照してスラスト量を推定する方法が考えられる。また、実験やシミュレーションなどから出力電圧から換算された馬力とスラスト量との関係を示す数式(左舷用、右舷用)を予め算出しておき、測定値をその数式に代入してスラスト量を推定する方法が考えられる。テーブルや数式は例えば制御部60の記憶部に格納されている。
【0059】
制御部60は、上述された推定結果に基づいて、左舷のスラストと右舷のスラストとが同程度になるように、左舷主機32a及び右舷主機31aを制御する。例えば、制御部60は、左舷主機32a及び右舷主機31aのうち、スラスト量の大きいプロペラ側の主機について電気モータ(プロペラ軸)の回転数を低下させ、及び/又は、スラスト量の小さいプロペラ側の主機について電気モータ(プロペラ軸)の回転数を増加させる制御が考えられる。あるいは、左舷主機32a及び右舷主機31aのうち、スラスト量の大きいプロペラ側のプロペラ軸について調速機(図示されず:左舷駆動部/右舷駆動部に含まれる)によりプロペラ軸の回転数を低下させ、及び/又は、スラスト量の小さいプロペラ側のプロペラ軸について調速機によりプロペラ軸の回転数を増加させる制御が考えられる。
【0060】
また、上記制御における制御量(電気モータ回転数、プロペラ軸回転数)については、例えば、目標船速に対応した目標スラスト量と推定されたスラスト量との差を算出して、PID制御(左舷用、右舷用、係数等については事前に実験やシミュレーションで取得)により、両主機や両調速機に対する制御量を算出する方法が考えられる。あるいは、前方側のプロペラ(図2の場合、右舷プロペラ10)のスラスト量を目標値として、PID制御により、後方側のプロペラ(左舷プロペラ20)の主機や調速機に対する制御量を算出する方法や、その逆の方法が考えられる。また、前方側のプロペラと後方側のプロペラのスラスト量との平均値等を目標値とする方法も考えられる。
【0061】
その他の構成については、第1の実施の形態と同様であるのでその説明を省略する。
また、本発明の第2の実施に係る船舶(推進装置)の動作の一例についても、主機が電気モータであり、出力電圧に基づいてスラスト量を推定する他は第1の実施の形態と同様であるのでその説明を省略する。
【0062】
本実施の形態に示されるように、電気推進船においても、第1の実施の形態と同様の効果を得ることができる。
【0063】
(第3の実施の形態)
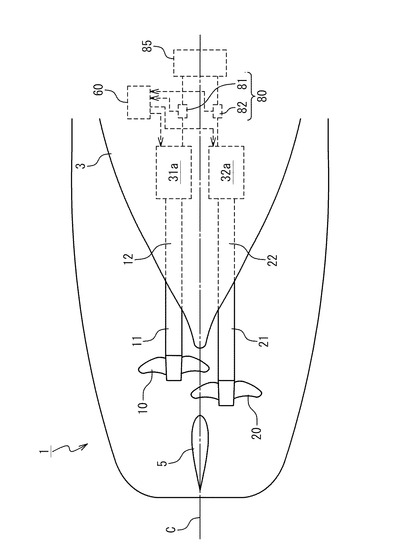
次に、本発明の第3の実施に係る船舶の推進装置の構成について説明する。図4は、本発明の第3の実施の形態に係る船舶の推進装置の一部の構成を示す模式図である。ただし、図4は船舶の推進装置を船底側から見た模式図である。ここでは、船舶として、一軸船型の船尾構造を有するOLP方式の二軸船1を例に説明する。図4に示されるように、二軸船1は、右舷プロペラ10a、右舷プロペラ軸管11、右舷プロペラ軸12、右舷主機31、左舷プロペラ20a、左舷プロペラ軸管21、左舷プロペラ軸22、右舷主機32、舵5、第1検知部40、第2検知部50、制御部60、燃料供給装置55、翼角駆動部90を備えている。
【0064】
本実施の形態では、右舷プロペラ10a及び左舷プロペラ20aが固定ピッチプロペラではなく可変ピッチプロペラである点、それゆえに制御部60は、翼角駆動部90を介して各プロペラの翼角で、スラスト量を制御する点で第1の実施の形態と異なる。翼角駆動部90は、右舷翼角駆動部91と左舷翼角駆動部92とを備える。
【0065】
右舷プロペラ10aは、船体の船尾の下方部分である船尾船体3の右舷に設けられた可変ピッチプロペラである。右舷プロペラ10aの翼の翼角は、右舷プロペラ軸12内部に配置された翼角駆動用の伝達構造(図示されず)を介して右舷翼角駆動部91により制御される。翼角駆動用の伝達構造、右舷翼角駆動部91、右舷プロペラ軸12及び右舷主機31は、右舷プロペラ10aを駆動する右舷駆動部と見ることができる。その他の構成・機能などは、第1の実施の形態と同様である。また、同様に、左舷プロペラ20aは、船尾船体3の左舷に設けられた可変ピッチプロペラである。左舷プロペラ20aの翼の翼角は、左舷プロペラ軸22内部に配置された翼角駆動用の伝達構造(図示されず)を介して左舷翼角駆動部92により制御される。翼角駆動用の伝達構造、左舷翼角駆動部92、左舷プロペラ軸22及び左舷主機32は、左舷プロペラ20aを駆動する右舷駆動部と見ることができる。その他の構成・機能などは、第1の実施の形態と同様である。
【0066】
制御部60は、第1検知部40や第2検知部50から出力された検知結果に基づいて、左舷プロペラ20a及び右舷プロペラ10aの各々についてスラスト量を推定する。その他の構成・機能などは、第1の実施の形態と同様である。
【0067】
制御部60は、上述された推定結果に基づいて、左舷のスラストと右舷のスラストとが同程度になるように、左舷プロペラ10a及び右舷プロペラ20aの翼角を制御する。例えば、制御部60は、左舷プロペラ10a及び右舷プロペラ20aのうち、スラスト量の大きいプロペラ側の翼について翼角を低下させ、及び/又は、スラスト量の小さいプロペラ側の翼について翼角を増加させる制御が考えられる。その他の構成・機能などは、第1の実施の形態と同様である。
【0068】
また、上記制御における制御量(翼角)については、例えば、目標船速に対応した目標スラスト量と推定されたスラスト量との差を算出して、PID制御(左舷用、右舷用、係数等については事前に実験やシミュレーションで取得)により、両プロペラに対する制御量を算出する方法が考えられる。あるいは、前方側のプロペラ(図2の場合、右舷プロペラ10a)のスラスト量を目標値として、PID制御により、後方側のプロペラ(左舷プロペラ20a)に対する制御量を算出する方法や、その逆の方法が考えられる。また、前方側のプロペラと後方側のプロペラのスラスト量との平均値等を目標値とする方法も考えられる。
【0069】
その他の構成については、第1の実施の形態と同様であるのでその説明を省略する。
また、本発明の第3の実施に係る船舶(推進装置)の動作の一例についても、右舷プロペラ10a及び左舷プロペラ20aが可変ピッチプロペラであり、制御に翼角を用いる他は第1の実施の形態と同様であるのでその説明を省略する。
【0070】
本実施の形態においても、第1の実施の形態と同様の効果を得ることができる。また、翼角の制御を用いるので操作を容易に行うことができる。
【0071】
(第4の実施の形態)
次に、本発明の第4の実施に係る船舶の推進装置の構成について説明する。図5は、本発明の第4の実施の形態に係る船舶の推進装置の一部の構成を示す模式図である。ただし、図5は船舶の推進装置を船底側から見た模式図である。ここでは、船舶として、一軸船型の船尾構造を有するOLP方式の二軸船1を例に説明する。図5に示されるように、二軸船1は、右舷プロペラ10a、右舷プロペラ軸管11、右舷プロペラ軸12、右舷主機31a、左舷プロペラ20a、左舷プロペラ軸管21、左舷プロペラ軸22、右舷主機32a、舵5、第3検知部80、制御部60、電力供給装置85、翼角駆動部90を備えている。
【0072】
本実施の形態では、二軸船1が電気推進船であり右舷主機32a及び右舷主機31aがエンジンではなく電気モータである点、それゆえに電力供給装置85の出力電圧を検出する第3検知部80を用いることができる点で第3の実施の形態と異なる。翼角駆動部90は、右舷翼角駆動部91と左舷翼角駆動部92とを備える。
【0073】
右舷プロペラ10aは、船体の船尾の下方部分である船尾船体3の右舷に設けられた可変ピッチプロペラである。右舷プロペラ10aの翼の翼角は、右舷プロペラ軸12内部に配置された翼角駆動用の伝達構造(図示されず)を介して右舷翼角駆動部91により制御される。右舷プロペラ軸12は、他端を船体内部の右舷主機31aに接続されている。右舷主機31aは例えば、電気モータである。右舷主機31aは、電力供給装置85(例示:発電機)から電力の供給を受け、右舷プロペラ軸12を介して右舷プロペラ10aを回転させる。翼角駆動用の伝達構造、右舷翼角駆動部91、右舷プロペラ軸12及び右舷主機31aは、右舷プロペラ10aを駆動する右舷駆動部と見ることができる。その他の構成・機能などは、第3の実施の形態と同様である。
【0074】
同様に、左舷プロペラ20aは、船尾船体3の左舷に設けられた可変ピッチプロペラである。左舷プロペラ20aの翼の翼角は、左舷プロペラ軸22内部に配置された翼角駆動用の伝達構造(図示されず)を介して左舷翼角駆動部92により制御される。左舷プロペラ軸22は、他端を船体内部の左舷主機32aに接続されている。左舷主機32aは例えば、電気モータある。左舷主機32aは、電力供給装置85から電力の供給を受け、左舷プロペラ軸22を介して左舷プロペラ20aを回転させる。翼角駆動用の伝達構造、左舷翼角駆動部92、左舷プロペラ軸22及び左舷主機32は、左舷プロペラ20aを駆動する左舷駆動部と見ることができる。その他の構成・機能などは、第3の実施の形態と同様である。
【0075】
制御部60は、第3検知部80から出力された検知結果に基づいて、第2の実施の形態に記載の方法で左舷プロペラ20aの左舷スラスト量と、右舷プロペラ10aの右舷スラスト量とを推定する。その他の構成・機能などは、第2の実施の形態と同様である。
【0076】
制御部60は、上述された推定結果に基づいて、左舷のスラストと右舷のスラストとが同程度になるように、左舷プロペラ10a及び右舷プロペラ20aの翼角を制御する。例えば、制御部60は、左舷プロペラ10a及び右舷プロペラ20aのうち、スラスト量の大きいプロペラ側の翼について翼角を低下させ、及び/又は、スラスト量の小さいプロペラ側の翼について翼角を増加させる制御が考えられる。その他の構成・機能などは、第3の実施の形態と同様である。
【0077】
その他の構成については、第3の実施の形態と同様であるのでその説明を省略する。
また、本発明の第4の実施に係る船舶(推進装置)の動作の一例についても、主機が電気モータであり、出力電圧に基づいてスラスト量を推定する他は第3の実施の形態と同様であるのでその説明を省略する。
【0078】
本実施の形態に示されるように、電気推進船においても、第3の実施の形態と同様の効果を得ることができる。
【0079】
以上説明したように、本発明の各実施の形態では、OLP方式の二軸船において、左右両プロペラにおける現在のスラスト量を推定し、それに基づいて当該スラスト量が同程度になるように、左右両プロペラの回転数や翼角を制御することができる。それにより、左右両プロペラにおけるスラスト量を自動的に同程度に制御し維持できるので、船首方位を一定に保つための当て舵量を極めて小さくすることができる。その結果、船舶の操縦性を向上することができ、推進性能の悪化も防止することができる。
【0080】
なお、本発明の各実施の形態の技術は、互いに技術的矛盾の発生しない限り、組み合わせて使用することができる。例えば、電気推進船に対して、軸馬力計を用いたスラスト量の推定を用いることができる。
【0081】
本発明は上記各実施の形態に限定されず、本発明の技術思想の範囲内において、各実施の形態は適宜変形又は変更され得ることは明らかである。
【符号の説明】
【0082】
1 二軸船
3 船尾船体
5 舵
10、10a 右舷プロペラ
11 右舷プロペラ軸管
12 右舷プロペラ軸
20、20a 左舷プロペラ
21 左舷プロペラ軸管
22 左舷プロペラ軸
31、31a 右舷主機
32、32a 左舷主機
40 第1検知部
41 右舷軸馬力検出部
42 左舷軸馬力検出部
50 第2検知部
51 右舷側燃料計
52 左舷側燃料計
55 燃料供給装置
60 制御部
80 第3検知部
81 右舷側電圧計
82 左舷側電圧計
85 電力供給装置
90 翼角駆動部
91 右舷翼角駆動部
92 左舷翼角駆動部
100 二軸船
103 船尾船体
105 舵
108、109 ブラケットフィン
110 右舷プロペラ
111 右舷船尾管
112 右舷プロペラ軸
120 左舷プロペラ
121 左舷船尾管
122 左舷プロペラ軸
C 船体中心線
131 右舷主機
132 左舷主機
【技術分野】
【0001】
本発明は、船舶の推進装置の制御に関する。
【背景技術】
【0002】
船舶の推進装置の一例として、一機一軸(一機の主機と一基のプロペラ)の方式、及び二機二軸(二機の主機と二基のプロペラ)の方式が知られている。一般商船の推進装置としては、これら一機一軸方式、又は二機二軸方式を採用することが多い。それぞれ、前者を採用した船舶は一軸船、後者を採用した船舶は二軸船とも呼ばれている。
【0003】
また、近年の船舶の大型化に伴い、一軸船ではプロペラの荷重度の増加に伴う推進効率の低下、キャビテーション範囲の拡大に伴う船体振動の増加及びエロージョンの発生が問題となるケースがある。それら問題は船舶を二軸船とすることで解決できることが知られている。二軸船とすると、一基当たりのプロペラ荷重度が低減され、プロペラ効率が向上し、キャビテーション発生範囲が低減できるからである。
【0004】
船尾に二基のプロペラを配置する例としては、オーバーラッピングプロペラ(OLP;Overlapping Propellers)の方式、インターロックプロペラの方式、及び、プロペラを左右並列する方式などがある。OLP方式では、二基のプロペラを前後にずらして配置し、船尾から見た場合に二基のプロペラの一部が重なるように配置する。OLP方式を採用することで推進性能が一軸船から5〜10%程度改善できる。また、インターロックプロペラ方式では、一方のプロペラの翼と翼との間に他方のプロペラの翼が入るように配置する。プロペラを左右並列する方式では、プロペラを船長方向の同じ位置に並べて配置する。
【0005】
ここで、一軸船型の船尾構造に二基のプロペラを配置する際のプロペラの位置関係は、船体中心線付近の遅い流れやビルジ渦のような船尾の縦渦との関係から船体中心近傍に配置することが好ましい。船尾において、通常の一軸船のプロペラの位置では船体中心線に対称な一組の内回りに回転するビルジ渦のような遅い流れの縦渦が発生する。プロペラは流れの遅い場所で作動する方が効率が良くなるため、その縦渦付近にてプロペラを回転させ、船体中心線付近の遅い流れや縦渦を回収することで、推進効率を向上させることができるからである。OLP方式の場合では、船体中心近傍の縦渦を効率良く回収して推進性能向上が図られるよう、プロペラ回転方向は外回りが採用されることが多い。
【0006】
例えば、特許文献1(WO2006/095774号公報)には、一軸船型の船尾構造にOLPを採用した場合の技術が記載されている。図1は、特許文献1の二軸船の船尾の構成の一部を示す模式図である。ただし、図1は二軸船の船尾を船底側から見た模式図である。また、この図では、二軸船100は、一軸船型の船尾を有し、船尾に右舷プロペラ110、左舷プロペラ120、及び舵105を備えている。右舷プロペラ110は、右舷船尾管111内に挿通されている右舷プロペラ軸112の一端に接続されている。右舷プロペラ軸112は、他端を船体内部の右舷主機131に接続されている。右舷主機131は、右舷プロペラ軸112を介して右舷プロペラ110を回転させる。また、左舷プロペラ120は、右舷プロペラ110と同様に、左舷船尾管121内に挿通されている左舷プロペラ軸122の一端に接続されている。左舷プロペラ軸122は、他端を船体内部の左舷主機132に接続されている。左舷主機132は左舷プロペラ軸122を介して左舷プロペラ120を回転させる。また、右舷船尾管111と船尾船体103との間、及び左舷船尾管121と船尾船体103との間はそれぞれブラケットフィン108、109にて結合されている。また、舵105は、右舷プロペラ110及び左舷プロペラ120の後方、船体中心線C上に設けられている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】WO2006/095774号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかし、OLP方式を用いた二軸船の場合、前方プロペラは船体中心近傍の遅い流れの中で作動し、後方プロペラは前方プロペラによって加速された早い流れ及び船体中心近傍の遅い流れの中を交互に通過する。例えば、図1の場合では、前方の右舷プロペラ110は、船体中心線Cの近傍の遅い流れの中で作動する。一方、後方の左舷プロペラ120は、前方の右舷プロペラ110によって加速された早い流れ(主に右舷側)及び船体中心線Cの近傍の遅い流れ(主に左舷側)の中を交互に通過する。したがって、左右舷のプロペラの作動状態が異なるため、左右両舷それぞれのプロペラの発生する推力が異なる(前方プロペラの推力が大きくなる)ことになる。このような場合、航行時には、船首方位を一定に保つために当て舵量を大きく取る必要があり、操縦性が悪く、推進性能も悪化すると考えられる。
【0009】
そこで、本発明の目的は、OLP方式を用いた二軸船において、推進性能を悪化させることなく船舶の操縦性を向上させることが可能な推進装置、それを用いた船舶、及び船舶の推進方法を提供することである。
【課題を解決するための手段】
【0010】
以下に、発明を実施するための形態で使用される番号・符号を用いて、課題を解決するための手段を説明する。これらの番号・符号は、特許請求の範囲の記載と発明を実施するための形態との対応関係を明らかにするために括弧付きで付加されたものである。ただし、それらの番号・符号を、特許請求の範囲に記載されている発明の技術的範囲の解釈に用いてはならない。
【0011】
本発明の推進装置は、左舷プロペラ(20、20a)と、右舷プロペラ(10、10a)と、左舷駆動部(22、32、32a、92)と、右舷駆動部(12、31、31a、91)と、検知部(40、50、80)と、制御部(60)とを具備する。右舷プロペラ(10、10a)は、船長方向における左舷プロペラ(20、20a)の前方又は後方の位置で、翼の一部が左舷プロペラ(20、20a)の翼とオーバーラップするように設けられている。左舷駆動部(22、32、32a、92)は、左舷プロペラ(20、20a)を駆動する。右舷駆動部(12、31、31a、91)は、右舷プロペラ(10、10a)を駆動する。検知部(40、50、80)は、左舷プロペラ(20、20a)及び右舷プロペラ(10、10a)の駆動に関連する情報を検知する。制御部(60)は、検知部(40、50、80)による検知結果に基づいて、左舷プロペラ(20、20a)及び右舷プロペラ(10、10a)の各々についてスラスト量を推定する。制御部(60)は、推定結果に基づいて、左舷のスラストと右舷のスラストとが同程度になるように、左舷駆動部(22、32、32a、92)及び右舷駆動部(12、31、31a、91)を制御する。
【0012】
本発明では、左舷プロペラ(20、20a)と右舷プロペラ(10、10a)とがオーバーラップしたOLP方式であっても、検知部(40、50、80)による検知結果に基づいて、左舷プロペラ(20、20a)及び右舷プロペラ(10、10a)の各々について現在のスラスト量を推定することができる。そして、それらスラスト量の推定値に基づいて、当該スラスト量が同程度になるように、左舷駆動部(22、32、32a、92)及び右舷駆動部(12、31、31a、91)を制御することができる。例えば、左右両プロペラ(20、20a、10、10a)の回転数や翼角を制御することができる。それにより、左右両プロペラ(20、20a、10、10a)におけるスラスト量を自動的に同程度に制御し維持できるので、船首方位を一定に保つための当て舵量を極めて小さくすることができる。その結果、操縦性を向上することができ、推進性能の悪化も防止することができる。
【0013】
上記の推進装置において、制御部(60)は、左舷駆動部(22、32、32a)及び右舷駆動部(12、31、31a)を介して、左舷のスラストと右舷のスラストとが同程度になるように、左舷プロペラ(20)及び右舷プロペラ(10)の回転数を制御する。
本発明では、左舷プロペラ(20)及び右舷プロペラ(10)の回転数の操作によりスラスト量の制御を行うので、操作が容易であり好ましい。
【0014】
上記の推進装置において、左舷駆動部(22、32、32a)は、船尾船体(3)から後方に伸び、左舷プロペラ(20)に接続された左舷プロペラ軸(22)と、左舷プロペラ軸(22)を駆動する左舷主機部(32、32a)とを備える。右舷駆動部(12、31、31a)は、船尾船体(3)から後方に伸び、右舷プロペラ(10)に接続された右舷プロペラ軸(12)と、右舷プロペラ軸を駆動する右舷主機部(31、31a)とを備える。制御部(60)は、左舷主機部(32、32a)及び右舷主機部(31、31a)による左舷プロペラ軸(22)及び右舷プロペラ軸(12)の回転数の制御により、左舷プロペラ(20)及び右舷プロペラ(10)の回転数を制御する。
本発明では、左舷プロペラ(20)及び右舷プロペラ(10)の回転数の操作を、左舷主機部(32)及び右舷主機部(31)による左舷プロペラ軸(22)及び右舷プロペラ軸(12)の回転数の制御で行うので、抵抗を増加させるような機器を用いる必要が無く好ましい。
【0015】
上記の推進装置において、左舷プロペラ(20a)及び右舷プロペラ(10a)は、可変ピッチプロペラである。制御部(60)は、左舷駆動部(22、32a、92)及び右舷駆動部(12、31a、91)を介して、左舷のスラストと右舷のスラストとが同程度になるように、左舷プロペラ(20a)及び右舷プロペラ(10a)の翼角を制御する。
本発明では、可変ピッチプロペラを有する場合には、左舷プロペラ(20a)及び右舷プロペラ(10a)の翼角の操作によりスラスト量の制御を行うので、操作が容易であり好ましい。
【0016】
上記の推進装置において、左舷駆動部(22、32a、92)は、船尾船体(3)から後方に伸び、左舷プロペラ(20a)に接続された左舷プロペラ軸(22)と、左舷プロペラ軸(22)を介して、左舷プロペラ(20a)としての可変ピッチプロペラの翼角を制御する左舷翼角駆動部(92)とを備える。右舷駆動部(12、31a、91)は、船尾船体(3)から後方に伸び、右舷プロペラ(10a)に接続された右舷プロペラ軸(12)と、右舷プロペラ軸(12)を介して、右舷プロペラ(10a)としての可変ピッチプロペラの翼角を制御する右舷翼角駆動部(91)とを備える。制御部(60)は、左舷翼角駆動部(92)及び右舷翼角駆動部(91)の制御により、左舷プロペラ(20a)及び右舷プロペラ(10a)の翼角を制御する。
本発明では、左舷プロペラ(20a)及び右舷プロペラ(10a)の翼角の操作を、プロペラ軸(22、12)を介して翼角を制御する翼角駆動部(92、91)を用いて行うので、抵抗を増加させるような機器を用いる必要が無く好ましい。
【0017】
上記の推進装置において、検知部(40)は、左舷プロペラ軸(22)に設けられた左舷軸馬力検出部(42)と、右舷プロペラ軸(12)に設けられた右舷軸馬力検出部(41)とを含む。制御部(60)は、左舷軸馬力検出部(42)が測定した左舷プロペラ軸(22)の左舷軸馬力と、右舷軸馬力検出部(41)が測定した右舷プロペラ軸(12)の右舷軸馬力とに基づいて、左舷プロペラ(20、20a)の左舷スラスト量と、右舷プロペラ(10、10a)の右舷スラスト量とを推定する。
本発明において、左舷軸馬力検出部(42)及び右舷軸馬力検出部(41)を用いることは、装着や測定が容易であり好ましい。
【0018】
上記の推進装置において、検知部(50)は、左舷駆動部(32)に供給される燃料の消費量を計測する左舷側燃料計(52)と、右舷駆動部(31)に供給される燃料の消費量を計測する右舷側燃料計(51)とを含む。制御部(60)は、左舷側燃料計(52)が測定した左舷駆動部(32)の左舷燃料消費量と、右舷側燃料計(51)が測定した右舷駆動部(31)の右舷側燃料消費量とに基づいて、左舷プロペラ(20、20a)の左舷スラスト量と、右舷プロペラ(10、10a)の右舷スラスト量とを推定する。
本発明において、左舷側燃料計(52)及び右舷側燃料計(51)を用いることは、装着や測定が容易であり好ましい。
【0019】
上記の推進装置において、検知部(80)は、左舷駆動部(32a)に供給される電力の出力電圧を計測する左舷側電圧計(82)と、右舷駆動部(31a)に供給される電力の出力電圧を計測する右舷側電圧計(81)とを含む。制御部(60)は、左舷側電圧計(82)が測定した左舷駆動部(32a)の左舷出力電圧と、右舷側電圧計(81)が測定した右舷駆動部(31a)の右舷側出力電圧とに基づいて、左舷プロペラ(20、20a)の左舷スラスト量と、右舷プロペラ(10、10a)の右舷スラスト量とを推定する。
本発明において、電気推進船の場合には、左舷側電圧計(82)及び右舷側電圧計(81)を用いることは、装着や測定が容易であり好ましい。
【0020】
上記の推進装置において、船尾船体(3)は、一軸船型の船尾構造を有する。
本発明により、一軸船型の船尾構造を有する場合には、OLP方式とすることで船体中心付近の遅い流れを効率的に回収でき好ましい。
【0021】
本発明の船舶は、上記各段落のいずれかに記載の推進装置を有する。
本発明により、上記各段落に記載の特徴を有する推進装置を船舶(1)に対して適用することで、その作用効果を特に顕著に奏することができる。
【0022】
本発明の船舶の推進方法は、制御部(60)が、検知部(40、50、80)が検知した左舷プロペラ(20、20a)及び右舷プロペラ(10、10a)の駆動に関連する情報を取得するステップと、制御部(60)が、検知部(40、50、80)による検知結果に基づいて、左舷プロペラ(20、20a)及び右舷プロペラ(10、10a)の各々についてスラスト量を推定するステップと、制御部(60)が、推定結果に基づいて、左舷のスラストと右舷のスラストとが同程度になるように、左舷駆動部(22、32、32a、92)及び右舷駆動部(12、31、31a、91)を制御するステップとを具備する。ただし、船舶は、左舷プロペラ(20、20a)と、船長方向における左舷プロペラ(20、20a)の前方又は後方の位置で、翼の一部が左舷プロペラ(20、20a)の翼とオーバーラップするように設けられた右舷プロペラ(10、10a)と、左舷プロペラ(20、20a)を駆動する左舷駆動部(22、32、32a、92)と、右舷プロペラ(10、10a)を駆動する右舷駆動部(12、31、31a、91)と、左舷プロペラ(20、20a)及び右舷プロペラ(10、10a)の駆動に関連する情報を検知する検知部(40、50、80)と、制御部(60)とを備える。
【0023】
上記の船舶の推進方法において、制御するステップは、制御部(60)が、左舷駆動部(22、32、32a)及び右舷駆動部(12、31、31a)を介して、左舷のスラストと右舷のスラストとが同程度になるように、左舷プロペラ(20)及び右舷プロペラ(10)の回転数を制御するステップを備える。
【0024】
上記の船舶の推進方法において、制御するステップは、制御部(60)が、左舷駆動部(22、32a、92)及び右舷駆動部(12、31a、91)を介して、左舷のスラストと右舷のスラストとが同程度になるように、可変ピッチプロペラである左舷プロペラ(20a)及び右舷プロペラ(10a)の翼角を制御するステップを備える。
【0025】
上記の船舶の推進方法において、推定するステップは、制御部(60)が、左舷プロペラ軸(22)に設けられた左舷軸馬力検出部(42)が測定した左舷プロペラ軸(22)の左舷軸馬力と、右舷プロペラ軸(12)に設けられた右舷軸馬力検出部(41)が測定した右舷プロペラ軸(12)の右舷軸馬力とに基づいて、左舷プロペラ(20、20a)の左舷スラスト量と、右舷プロペラ(10、10a)の右舷スラスト量とを推定するステップを備える。
【0026】
上記の船舶の推進方法において、推定するステップは、制御部(60)が、左舷駆動部(32)に供給される燃料の消費量を計測する左舷側燃料計(52)が測定した左舷駆動部(32)の左舷燃料消費量と、右舷駆動部(31)に供給される燃料の消費量を計測する右舷側燃料計(51)が測定した右舷駆動部(31)の右舷側燃料消費量とに基づいて、左舷プロペラ(20、20a)の左舷スラスト量と、右舷プロペラ(10、10a)の右舷スラスト量とを推定するステップを備える。
【0027】
上記の船舶の推進方法において、推定するステップは、制御部(60)が、左舷駆動部(32a)に供給される電力の出力電圧を計測する左舷側電圧計(82)が測定した左舷駆動部(32a)の左舷出力電圧と、右舷駆動部(31a)に供給される電力の出力電圧を計測する右舷側電圧計(81)が測定した右舷駆動部(31a)の右舷側出力電圧とに基づいて、左舷プロペラ(20、20a)の左舷スラスト量と、右舷プロペラ(10、10a)の右舷スラスト量を推定するステップを備える。
【0028】
本発明のプログラムは、上記各段落のいずれかに記載の船舶の推進方法をコンピュータに実行させるプログラムである。
【発明の効果】
【0029】
本発明により、OLP方式を用いた二軸船において、推進性能を悪化させることなく船舶の操縦性を向上することが可能となる。
【図面の簡単な説明】
【0030】
【図1】図1は、特許文献1の二軸船の船尾の構成の一部を示す模式図である。
【図2】図2は、本発明の第1の実施の形態に係る船舶の推進装置の一部の構成を示す模式図である。
【図3】図3は、本発明の第2の実施の形態に係る船舶の推進装置の一部の構成を示す模式図である。
【図4】図4は、本発明の第3の実施の形態に係る船舶の推進装置の一部の構成を示す模式図である。
【図5】図5は、本発明の第4の実施の形態に係る船舶の推進装置の一部の構成を示す模式図である。
【発明を実施するための形態】
【0031】
以下、本発明の推進装置、それを用いた船舶、及び船舶の推進方法の実施の形態について添付図面を参照して説明する。
【0032】
(第1の実施の形態)
まず、本発明の第1の実施に係る船舶の推進装置の構成について説明する。図2は、本発明の第1の実施の形態に係る船舶の推進装置の一部の構成を示す模式図である。ただし、図2は船舶の推進装置を船底側から見た模式図である。ここでは、船舶として、一軸船型の船尾構造を有するOLP方式の二軸船1を例に説明する。図2に示されるように、二軸船1は、右舷プロペラ10、右舷プロペラ軸管11、右舷プロペラ軸12、右舷主機31、左舷プロペラ20、左舷プロペラ軸管21、左舷プロペラ軸22、右舷主機32、舵5、第1検知部40、第2検知部50、制御部60、燃料供給装置55を備えている。
【0033】
右舷プロペラ10は、船体の船尾の下方部分である船尾船体3の右舷に設けられた固定ピッチプロペラまたは可変ピッチプロペラである。右舷プロペラ10は、右舷プロペラ軸管11内に挿入されている右舷プロペラ軸12の一端に接続されている。右舷プロペラ軸12は、他端を船体内部の右舷主機31に接続されている。右舷主機31は例えば、ディーゼルエンジンである。右舷主機31は、燃料供給装置55(例示:燃料タンク)から燃料(例示:重油)の供給を受け、右舷プロペラ軸12を介して右舷プロペラ10を回転させる。右舷プロペラ軸12及び右舷主機31は、右舷プロペラ10を駆動する右舷駆動部と見ることができる。
【0034】
また、同様に、左舷プロペラ20は、船尾船体3の左舷に設けられた固定ピッチプロペラまたは可変ピッチプロペラである。左舷プロペラ20は、左舷プロペラ軸管21内に挿入されている左舷プロペラ軸22の一端に接続されている。左舷プロペラ軸22は、他端を船体内部の左舷主機32に接続されている。左舷主機32は例えば、ディーゼルエンジンである。左舷主機32は、燃料供給装置55から燃料(例示:重油)の供給を受け、左舷プロペラ軸22を介して左舷プロペラ20を回転させる。左舷プロペラ軸22及び左舷主機32は、左舷プロペラ20を駆動する左舷駆動部と見ることができる。
【0035】
右舷プロペラ軸管11及び左舷プロペラ軸管21は、それぞれ右舷プロペラ軸12及び左舷プロペラ軸22を保護し、支持するための外筒(管)であり、ボッシングに例示される。ただし、本実施の形態はそれに限定されず、どのような形態のものでもよい。
【0036】
右舷プロペラ10は、船長方向における左舷プロペラ20の前方又は後方の位置で、翼の一部が左舷プロペラ20の翼とオーバーラップするように設けられている(OLP方式)。また、右舷プロペラ10と左舷プロペラ20とは、船体中心線Cに対して対称な位置に設けられている。図2の例では、右舷プロペラ10は、船長方向における左舷プロペラ20の前方に設けられた場合を示している。ただし、本実施の形態はこの例に限定されるものではなく、右舷プロペラ10が左舷プロペラ20の後方の場合についても、同様に適用が可能である。
【0037】
舵5は、右舷プロペラ10及び左舷プロペラ20の後方、船体中心線C上に設けられている。
【0038】
第1検知部40及び第2検知部50は、左舷プロペラ20及び右舷プロペラ10の駆動に関連する情報を検知する。各プロペラの駆動に関連する情報とは、制御部60が左舷プロペラ20及び右舷プロペラ10の各々についてスラスト量を推定するために必要な情報であり、主機が発生するエネルギーやプロペラ軸が伝達するエネルギー又はそれに対応する(関連付けられる)数値に例示される。より具体的には、プロペラ軸の軸馬力や主機の燃料消費量に例示される。図2の例では、第1検知部40及び第2検知部50のいずれか一方を用いても良いし、両方を用いても良い。また、更に多くの検知部を有していても良い。
【0039】
第1検知部40は、図2の例では、主機からプロペラに供給される伝達馬力を計測する軸馬力計であり、例えば、右舷軸馬力検出部41と左舷軸馬力検出部42とを備える。右舷軸馬力検出部41は、右舷プロペラ軸12のねじれを測定して、そのねじれから右舷プロペラ軸12の軸馬力を算出する。左舷軸馬力検出部42は、左舷プロペラ軸22のねじれを測定して、そのねじれから左舷プロペラ軸22の軸馬力を算出する。各プロペラ軸の軸馬力は制御部60へ出力される。
【0040】
第2検知部50は、図2の例では、燃料供給装置55から主機へ供給される燃料の消費量(供給量)を計測する燃料計であり、例えば、右舷側燃料計51と左舷側燃料計52とを備える。右舷側燃料計51は、右舷主機31に供給される燃料の消費量(供給量)を計測する。左舷側燃料計52は、左舷主機32に供給される燃料の消費量(供給量)を計測する。燃料の消費量(供給量)は制御部60へ出力される。右舷側燃料計51と左舷側燃料計52は、燃料の単位時間当たりの流量を示す燃料流量計や燃料の積算消費量を示す積算燃料流量計に例示される。
【0041】
制御部60は、情報処理機能を有する装置であり、マイクロコンピュータに例示される。制御部60の以下の動作は、例えば、コンピュータにインストールされたプログラムにより実行することができる。制御部60は、第1検知部40や第2検知部50から出力された検知結果に基づいて、左舷プロペラ20及び右舷プロペラ10の各々についてスラスト量を推定する。例えば、制御部60は、左舷軸馬力検出部42が測定した左舷プロペラ軸22の左舷軸馬力と、右舷軸馬力検出部計41が測定した右舷プロペラ軸12の右舷軸馬力とに基づいて、左舷プロペラ20の左舷スラスト量と、右舷プロペラ10の右舷スラスト量とを推定する。あるいは、制御部60は、左舷側燃料計52が測定した左舷主機32の左舷燃料消費量と、右舷側燃料計51が測定した右舷主機31の右舷側燃料消費量とに基づいて、左舷プロペラ20の左舷スラスト量と、右舷プロペラ10の右舷スラスト量とを推定する。更に、制御部60は、軸馬力及び燃料消費量の両方を用いてスラスト量を推定しても良い。
【0042】
ここで、軸馬力及び燃料消費量の少なくとも一方からスラスト量を推定する方法としては、以下のような方法が考えられる。実験やシミュレーションなどから軸馬力及び燃料消費量の少なくとも一方とスラスト量との関係を示すテーブル(左舷用、右舷用)を予め求めておき、測定値に基づいてテーブルを参照してスラスト量を推定する方法が考えられる。また、実験やシミュレーションなどから軸馬力及び燃料消費量の少なくとも一方とスラスト量との関係を示す数式(左舷用、右舷用)を予め算出しておき、測定値をその数式に代入してスラスト量を推定する方法が考えられる。テーブルや数式は例えば制御部60の記憶部に格納されている。
【0043】
制御部60は、上述された推定結果に基づいて、左舷のスラストと右舷のスラストとが同程度になるように、左舷主機32及び右舷主機31を制御する。例えば、制御部60は、左舷主機32及び右舷主機31のうち、スラスト量の大きいプロペラ側の主機についてエンジン(プロペラ軸)の回転数を低下させ、及び/又は、スラスト量の小さいプロペラ側の主機についてエンジン(プロペラ軸)の回転数を増加させる制御が考えられる。あるいは、左舷主機32及び右舷主機31のうち、スラスト量の大きいプロペラ側のプロペラ軸について調速機(図示されず:左舷駆動部/右舷駆動部に含まれる)によりプロペラ軸の回転数を低下させ、及び/又は、スラスト量の小さいプロペラ側のプロペラ軸について調速機によりプロペラ軸の回転数を増加させる制御が考えられる。
【0044】
また、上記制御における制御量(エンジン回転数、プロペラ軸回転数)については、例えば、目標船速に対応した目標スラスト量と推定されたスラスト量との差を算出して、PID制御(左舷用、右舷用、係数等については事前に実験やシミュレーションで取得)により、両主機や両調速機に対する制御量を算出する方法が考えられる。あるいは、前方側のプロペラ(図2の場合、右舷プロペラ10)のスラスト量を目標値として、PID制御により、後方側のプロペラ(左舷プロペラ20)の主機や調速機に対する制御量を算出する方法や、その逆の方法が考えられる。また、前方側のプロペラと後方側のプロペラのスラスト量との平均値等を目標値とする方法も考えられる。
【0045】
以上のような構成により、左舷プロペラ20及び右舷プロペラ10の回転数をそれぞれ増加又は低下させることができ、左舷プロペラ20の左舷スラスト量と右舷プロペラ10の右舷スラスト量とを同程度にすることができる。
【0046】
次に、本発明の第1の実施に係る船舶(推進装置)の動作の一例について説明する。
ここでは、第1検知部40を用いて軸馬力の検知を行い、予め準備されたテーブルに基づいてスラスト量の推定を行い、エンジン回線数でスラスト量を制御する例について説明する。ただし、本実施の形態はこの例に限定されるものではなく、他の場合であっても同様に動作可能である。例えば、第2検知部50を単独で又は同時に用いても良いし、予め準備した関数を用いても良い。
【0047】
左舷主機32及び右舷主機31の動作により、それぞれ左舷プロペラ軸22及び右舷プロペラ軸12を介して、それぞれ左舷プロペラ20及び右舷プロペラ10が回転している(ステップS1)。このとき、左舷プロペラ20及び右舷プロペラ10の各スラスト量が異なっている可能性がある。
【0048】
そのとき、右舷軸馬力検出部41は、右舷プロペラ軸12のねじれを測定し、そのねじれから右舷プロペラ軸12の軸馬力を算出して、制御部60へ出力する。同様に、左舷軸馬力検出部42は、左舷プロペラ軸22のねじれを測定し、そのねじれから左舷プロペラ軸22の軸馬力を算出して、制御部60へ出力する(ステップS2)。
【0049】
制御部60は、左舷プロペラ軸22の左舷軸馬力と、右舷プロペラ軸12の右舷軸馬力とを、左舷軸馬力検出部42及び右舷軸馬力検出部計41から取得する(ステップS3)。そして、制御部60は、取得した左舷プロペラ軸22の左舷軸馬力と、右舷プロペラ軸12の右舷軸馬力とに基づいて、予め準備された軸馬力とスラスト量との関係を示すテーブルを参照して、左舷プロペラ20の左舷スラスト量と、右舷プロペラ10の右舷スラスト量とを推定する(ステップS4)。
【0050】
制御部60は、上述された推定結果に基づいて、左舷のスラストと右舷のスラストとが同程度になるように、左舷主機32及び右舷主機31のうち、スラスト量の大きいプロペラ側の主機についてエンジンの回転数を低下させ、及び/又は、スラスト量の小さいプロペラ側の主機についてエンジンの回転数を増加させる制御を行う(ステップS5)。
【0051】
その後、船舶の運航を行いつつ、ステップS2〜S5を繰り返すことで、二軸船1を安定的に操作することができる。それにより、当て舵量を低減することができる。
【0052】
以上に示されるように、本実施の形態により、OLP方式を用いた二軸船において、推進性能を悪化させることなく船舶の操縦性を向上させることが可能となる。
【0053】
(第2の実施の形態)
次に、本発明の第2の実施に係る船舶の推進装置の構成について説明する。図3は、本発明の第2の実施の形態に係る船舶の推進装置の一部の構成を示す模式図である。ただし、図3は船舶の推進装置を船底側から見た模式図である。ここでは、船舶として、一軸船型の船尾構造を有するOLP方式の二軸船1を例に説明する。図3に示されるように、二軸船1は、右舷プロペラ10、右舷プロペラ軸管11、右舷プロペラ軸12、右舷主機31a、左舷プロペラ20、左舷プロペラ軸管21、左舷プロペラ軸22、右舷主機32a、舵5、第3検知部80、制御部60、電力供給装置85を備えている。
【0054】
本実施の形態では、二軸船1が電気推進船であり右舷主機32a及び右舷主機31aがエンジンではなく電気モータである点、それゆえに電力供給装置85の出力電圧を検出する第3検知部80を用いることができる点で第1の実施の形態と異なる。
【0055】
まず、右舷プロペラ軸12は、他端を船体内部の右舷主機31aに接続されている。右舷主機31aは例えば、電気モータである。右舷主機31aは、電力供給装置85(例示:発電機)から電力の供給を受け、右舷プロペラ軸12を介して右舷プロペラ10を回転させる。右舷プロペラ軸12及び右舷主機31aは、右舷プロペラ10を駆動する右舷駆動部と見ることができる。その他の構成・機能などは、第1の実施の形態と同様である。同様に、左舷プロペラ軸22は、他端を船体内部の左舷主機32aに接続されている。左舷主機32aは例えば、電気モータある。左舷主機32aは、電力供給装置85から電力の供給を受け、左舷プロペラ軸22を介して左舷プロペラ20を回転させる。左舷プロペラ軸22及び左舷主機32は、左舷プロペラ20を駆動する左舷駆動部と見ることができる。その他の構成・機能などは、第1の実施の形態と同様である。
【0056】
第3検知部80は、左舷プロペラ20及び右舷プロペラ10の駆動に関連する情報(制御部60が左舷プロペラ20及び右舷プロペラ10の各々についてスラスト量を推定するために必要な情報)として、主機に供給される電力(電流、電圧)を検出する。第3検知部80は、図3の例では、主機に電力供給する電力供給装置85の出力電圧を計測する電圧計であり、例えば、右舷側電圧計81と左舷側電圧計82とを備える。右舷側電圧計81は、右舷主機31aへの出力電圧を測定して、制御部60へ出力する。左舷側電圧計82は、左舷主機32aへの出力電圧を測定して、制御部60へ出力する。
【0057】
制御部60は、例えば、左舷側電圧計82が測定した左舷主機32a用の出力電圧と、右舷側電圧計81が測定した右舷主機31a用の出力電圧とに基づいて、左舷主機32a及び右舷主機31aの馬力に換算する。そして、換算された左舷の馬力及び右舷の馬力に基づいて、左舷プロペラ20の左舷スラスト量と、右舷プロペラ10の右舷スラスト量とを推定する。その他の構成・機能などは、第1の実施の形態と同様である。
【0058】
ここで、出力電圧からスラスト量を推定する方法としては、以下のような方法が考えられる。実験やシミュレーションなどから出力電圧から換算された馬力とスラスト量との関係を示すテーブル(左舷用、右舷用)を予め求めておき、測定値に基づいてテーブルを参照してスラスト量を推定する方法が考えられる。また、実験やシミュレーションなどから出力電圧から換算された馬力とスラスト量との関係を示す数式(左舷用、右舷用)を予め算出しておき、測定値をその数式に代入してスラスト量を推定する方法が考えられる。テーブルや数式は例えば制御部60の記憶部に格納されている。
【0059】
制御部60は、上述された推定結果に基づいて、左舷のスラストと右舷のスラストとが同程度になるように、左舷主機32a及び右舷主機31aを制御する。例えば、制御部60は、左舷主機32a及び右舷主機31aのうち、スラスト量の大きいプロペラ側の主機について電気モータ(プロペラ軸)の回転数を低下させ、及び/又は、スラスト量の小さいプロペラ側の主機について電気モータ(プロペラ軸)の回転数を増加させる制御が考えられる。あるいは、左舷主機32a及び右舷主機31aのうち、スラスト量の大きいプロペラ側のプロペラ軸について調速機(図示されず:左舷駆動部/右舷駆動部に含まれる)によりプロペラ軸の回転数を低下させ、及び/又は、スラスト量の小さいプロペラ側のプロペラ軸について調速機によりプロペラ軸の回転数を増加させる制御が考えられる。
【0060】
また、上記制御における制御量(電気モータ回転数、プロペラ軸回転数)については、例えば、目標船速に対応した目標スラスト量と推定されたスラスト量との差を算出して、PID制御(左舷用、右舷用、係数等については事前に実験やシミュレーションで取得)により、両主機や両調速機に対する制御量を算出する方法が考えられる。あるいは、前方側のプロペラ(図2の場合、右舷プロペラ10)のスラスト量を目標値として、PID制御により、後方側のプロペラ(左舷プロペラ20)の主機や調速機に対する制御量を算出する方法や、その逆の方法が考えられる。また、前方側のプロペラと後方側のプロペラのスラスト量との平均値等を目標値とする方法も考えられる。
【0061】
その他の構成については、第1の実施の形態と同様であるのでその説明を省略する。
また、本発明の第2の実施に係る船舶(推進装置)の動作の一例についても、主機が電気モータであり、出力電圧に基づいてスラスト量を推定する他は第1の実施の形態と同様であるのでその説明を省略する。
【0062】
本実施の形態に示されるように、電気推進船においても、第1の実施の形態と同様の効果を得ることができる。
【0063】
(第3の実施の形態)
次に、本発明の第3の実施に係る船舶の推進装置の構成について説明する。図4は、本発明の第3の実施の形態に係る船舶の推進装置の一部の構成を示す模式図である。ただし、図4は船舶の推進装置を船底側から見た模式図である。ここでは、船舶として、一軸船型の船尾構造を有するOLP方式の二軸船1を例に説明する。図4に示されるように、二軸船1は、右舷プロペラ10a、右舷プロペラ軸管11、右舷プロペラ軸12、右舷主機31、左舷プロペラ20a、左舷プロペラ軸管21、左舷プロペラ軸22、右舷主機32、舵5、第1検知部40、第2検知部50、制御部60、燃料供給装置55、翼角駆動部90を備えている。
【0064】
本実施の形態では、右舷プロペラ10a及び左舷プロペラ20aが固定ピッチプロペラではなく可変ピッチプロペラである点、それゆえに制御部60は、翼角駆動部90を介して各プロペラの翼角で、スラスト量を制御する点で第1の実施の形態と異なる。翼角駆動部90は、右舷翼角駆動部91と左舷翼角駆動部92とを備える。
【0065】
右舷プロペラ10aは、船体の船尾の下方部分である船尾船体3の右舷に設けられた可変ピッチプロペラである。右舷プロペラ10aの翼の翼角は、右舷プロペラ軸12内部に配置された翼角駆動用の伝達構造(図示されず)を介して右舷翼角駆動部91により制御される。翼角駆動用の伝達構造、右舷翼角駆動部91、右舷プロペラ軸12及び右舷主機31は、右舷プロペラ10aを駆動する右舷駆動部と見ることができる。その他の構成・機能などは、第1の実施の形態と同様である。また、同様に、左舷プロペラ20aは、船尾船体3の左舷に設けられた可変ピッチプロペラである。左舷プロペラ20aの翼の翼角は、左舷プロペラ軸22内部に配置された翼角駆動用の伝達構造(図示されず)を介して左舷翼角駆動部92により制御される。翼角駆動用の伝達構造、左舷翼角駆動部92、左舷プロペラ軸22及び左舷主機32は、左舷プロペラ20aを駆動する右舷駆動部と見ることができる。その他の構成・機能などは、第1の実施の形態と同様である。
【0066】
制御部60は、第1検知部40や第2検知部50から出力された検知結果に基づいて、左舷プロペラ20a及び右舷プロペラ10aの各々についてスラスト量を推定する。その他の構成・機能などは、第1の実施の形態と同様である。
【0067】
制御部60は、上述された推定結果に基づいて、左舷のスラストと右舷のスラストとが同程度になるように、左舷プロペラ10a及び右舷プロペラ20aの翼角を制御する。例えば、制御部60は、左舷プロペラ10a及び右舷プロペラ20aのうち、スラスト量の大きいプロペラ側の翼について翼角を低下させ、及び/又は、スラスト量の小さいプロペラ側の翼について翼角を増加させる制御が考えられる。その他の構成・機能などは、第1の実施の形態と同様である。
【0068】
また、上記制御における制御量(翼角)については、例えば、目標船速に対応した目標スラスト量と推定されたスラスト量との差を算出して、PID制御(左舷用、右舷用、係数等については事前に実験やシミュレーションで取得)により、両プロペラに対する制御量を算出する方法が考えられる。あるいは、前方側のプロペラ(図2の場合、右舷プロペラ10a)のスラスト量を目標値として、PID制御により、後方側のプロペラ(左舷プロペラ20a)に対する制御量を算出する方法や、その逆の方法が考えられる。また、前方側のプロペラと後方側のプロペラのスラスト量との平均値等を目標値とする方法も考えられる。
【0069】
その他の構成については、第1の実施の形態と同様であるのでその説明を省略する。
また、本発明の第3の実施に係る船舶(推進装置)の動作の一例についても、右舷プロペラ10a及び左舷プロペラ20aが可変ピッチプロペラであり、制御に翼角を用いる他は第1の実施の形態と同様であるのでその説明を省略する。
【0070】
本実施の形態においても、第1の実施の形態と同様の効果を得ることができる。また、翼角の制御を用いるので操作を容易に行うことができる。
【0071】
(第4の実施の形態)
次に、本発明の第4の実施に係る船舶の推進装置の構成について説明する。図5は、本発明の第4の実施の形態に係る船舶の推進装置の一部の構成を示す模式図である。ただし、図5は船舶の推進装置を船底側から見た模式図である。ここでは、船舶として、一軸船型の船尾構造を有するOLP方式の二軸船1を例に説明する。図5に示されるように、二軸船1は、右舷プロペラ10a、右舷プロペラ軸管11、右舷プロペラ軸12、右舷主機31a、左舷プロペラ20a、左舷プロペラ軸管21、左舷プロペラ軸22、右舷主機32a、舵5、第3検知部80、制御部60、電力供給装置85、翼角駆動部90を備えている。
【0072】
本実施の形態では、二軸船1が電気推進船であり右舷主機32a及び右舷主機31aがエンジンではなく電気モータである点、それゆえに電力供給装置85の出力電圧を検出する第3検知部80を用いることができる点で第3の実施の形態と異なる。翼角駆動部90は、右舷翼角駆動部91と左舷翼角駆動部92とを備える。
【0073】
右舷プロペラ10aは、船体の船尾の下方部分である船尾船体3の右舷に設けられた可変ピッチプロペラである。右舷プロペラ10aの翼の翼角は、右舷プロペラ軸12内部に配置された翼角駆動用の伝達構造(図示されず)を介して右舷翼角駆動部91により制御される。右舷プロペラ軸12は、他端を船体内部の右舷主機31aに接続されている。右舷主機31aは例えば、電気モータである。右舷主機31aは、電力供給装置85(例示:発電機)から電力の供給を受け、右舷プロペラ軸12を介して右舷プロペラ10aを回転させる。翼角駆動用の伝達構造、右舷翼角駆動部91、右舷プロペラ軸12及び右舷主機31aは、右舷プロペラ10aを駆動する右舷駆動部と見ることができる。その他の構成・機能などは、第3の実施の形態と同様である。
【0074】
同様に、左舷プロペラ20aは、船尾船体3の左舷に設けられた可変ピッチプロペラである。左舷プロペラ20aの翼の翼角は、左舷プロペラ軸22内部に配置された翼角駆動用の伝達構造(図示されず)を介して左舷翼角駆動部92により制御される。左舷プロペラ軸22は、他端を船体内部の左舷主機32aに接続されている。左舷主機32aは例えば、電気モータある。左舷主機32aは、電力供給装置85から電力の供給を受け、左舷プロペラ軸22を介して左舷プロペラ20aを回転させる。翼角駆動用の伝達構造、左舷翼角駆動部92、左舷プロペラ軸22及び左舷主機32は、左舷プロペラ20aを駆動する左舷駆動部と見ることができる。その他の構成・機能などは、第3の実施の形態と同様である。
【0075】
制御部60は、第3検知部80から出力された検知結果に基づいて、第2の実施の形態に記載の方法で左舷プロペラ20aの左舷スラスト量と、右舷プロペラ10aの右舷スラスト量とを推定する。その他の構成・機能などは、第2の実施の形態と同様である。
【0076】
制御部60は、上述された推定結果に基づいて、左舷のスラストと右舷のスラストとが同程度になるように、左舷プロペラ10a及び右舷プロペラ20aの翼角を制御する。例えば、制御部60は、左舷プロペラ10a及び右舷プロペラ20aのうち、スラスト量の大きいプロペラ側の翼について翼角を低下させ、及び/又は、スラスト量の小さいプロペラ側の翼について翼角を増加させる制御が考えられる。その他の構成・機能などは、第3の実施の形態と同様である。
【0077】
その他の構成については、第3の実施の形態と同様であるのでその説明を省略する。
また、本発明の第4の実施に係る船舶(推進装置)の動作の一例についても、主機が電気モータであり、出力電圧に基づいてスラスト量を推定する他は第3の実施の形態と同様であるのでその説明を省略する。
【0078】
本実施の形態に示されるように、電気推進船においても、第3の実施の形態と同様の効果を得ることができる。
【0079】
以上説明したように、本発明の各実施の形態では、OLP方式の二軸船において、左右両プロペラにおける現在のスラスト量を推定し、それに基づいて当該スラスト量が同程度になるように、左右両プロペラの回転数や翼角を制御することができる。それにより、左右両プロペラにおけるスラスト量を自動的に同程度に制御し維持できるので、船首方位を一定に保つための当て舵量を極めて小さくすることができる。その結果、船舶の操縦性を向上することができ、推進性能の悪化も防止することができる。
【0080】
なお、本発明の各実施の形態の技術は、互いに技術的矛盾の発生しない限り、組み合わせて使用することができる。例えば、電気推進船に対して、軸馬力計を用いたスラスト量の推定を用いることができる。
【0081】
本発明は上記各実施の形態に限定されず、本発明の技術思想の範囲内において、各実施の形態は適宜変形又は変更され得ることは明らかである。
【符号の説明】
【0082】
1 二軸船
3 船尾船体
5 舵
10、10a 右舷プロペラ
11 右舷プロペラ軸管
12 右舷プロペラ軸
20、20a 左舷プロペラ
21 左舷プロペラ軸管
22 左舷プロペラ軸
31、31a 右舷主機
32、32a 左舷主機
40 第1検知部
41 右舷軸馬力検出部
42 左舷軸馬力検出部
50 第2検知部
51 右舷側燃料計
52 左舷側燃料計
55 燃料供給装置
60 制御部
80 第3検知部
81 右舷側電圧計
82 左舷側電圧計
85 電力供給装置
90 翼角駆動部
91 右舷翼角駆動部
92 左舷翼角駆動部
100 二軸船
103 船尾船体
105 舵
108、109 ブラケットフィン
110 右舷プロペラ
111 右舷船尾管
112 右舷プロペラ軸
120 左舷プロペラ
121 左舷船尾管
122 左舷プロペラ軸
C 船体中心線
131 右舷主機
132 左舷主機
【特許請求の範囲】
【請求項1】
左舷プロペラと、
船長方向における前記左舷プロペラの前方又は後方の位置で、翼の一部が前記左舷プロペラの翼とオーバーラップするように設けられた右舷プロペラと、
前記左舷プロペラを駆動する左舷駆動部と、
前記右舷プロペラを駆動する右舷駆動部と、
前記左舷プロペラ及び前記右舷プロペラの駆動に関連する情報を検知する検知部と、
前記検知部による検知結果に基づいて、前記左舷プロペラ及び前記右舷プロペラの各々についてスラスト量を推定する制御部と
を具備し、
前記制御部は、推定結果に基づいて、前記左舷のスラストと前記右舷のスラストとが同程度になるように、前記左舷駆動部及び前記右舷駆動部を制御する
船舶の推進装置。
【請求項2】
請求項1に記載の船舶の推進装置であって、
前記制御部は、前記左舷駆動部及び前記右舷駆動部を介して、前記左舷のスラストと前記右舷のスラストとが同程度になるように、前記左舷プロペラ及び前記右舷プロペラの回転数を制御する
船舶の推進装置。
【請求項3】
請求項2に記載の船舶の推進装置であって、
前記左舷駆動部は、
船尾船体から後方に伸び、前記左舷プロペラに接続された左舷プロペラ軸と、
前記左舷プロペラ軸を駆動する左舷主機部と
を備え、
前記右舷駆動部は、
前記船尾船体から後方に伸び、前記右舷プロペラに接続された右舷プロペラ軸と、
前記右舷プロペラ軸を駆動する右舷主機部と
を備え、
前記制御部は、前記左舷主機部及び前記右舷主機部による前記左舷プロペラ軸及び前記右舷プロペラ軸の回転数の制御により、前記左舷プロペラ及び前記右舷プロペラの回転数を制御する
船舶の推進装置。
【請求項4】
請求項1に記載の船舶の推進装置であって、
前記左舷プロペラ及び前記右舷プロペラは、可変ピッチプロペラであり、
前記制御部は、前記左舷駆動部及び前記右舷駆動部を介して、前記左舷のスラストと前記右舷のスラストとが同程度になるように、前記左舷プロペラ及び前記右舷プロペラの翼角を制御する
船舶の推進装置。
【請求項5】
請求項4に記載の船舶の推進装置であって、
前記左舷駆動部は、
船尾船体から後方に伸び、前記左舷プロペラに接続された左舷プロペラ軸と、
前記左舷プロペラ軸を介して、前記左舷プロペラとしての可変ピッチプロペラの翼角を制御する左舷翼角駆動部と
を備え、
前記右舷駆動部は、
前記船尾船体から後方に伸び、前記右舷プロペラに接続された右舷プロペラ軸と、
前記右舷プロペラ軸を介して、前記右舷プロペラとしての可変ピッチプロペラの翼角を制御する右舷翼角駆動部と
を備え、
前記制御部は、前記左舷翼角駆動部及び右舷翼角駆動部の制御により、前記左舷プロペラ及び前記右舷プロペラの翼角を制御する
船舶の推進装置。
【請求項6】
請求項1乃至5のいずれか一項に記載の船舶の推進装置であって、
前記検知部は、
前記左舷プロペラ軸に設けられた左舷軸馬力検出部と、
前記右舷プロペラ軸に設けられた右舷軸馬力検出部と
を含み、
前記制御部は、前記左舷軸馬力検出部が測定した前記左舷プロペラ軸の左舷軸馬力と、前記右舷軸馬力検出部が測定した前記右舷プロペラ軸の右舷軸馬力とに基づいて、前記左舷プロペラの左舷スラスト量と、前記右舷プロペラの右舷スラスト量とを推定する
船舶の推進装置。
【請求項7】
請求項1乃至5のいずれか一項に記載の船舶の推進装置であって、
前記検知部は、
前記左舷駆動部に供給される燃料の消費量を計測する左舷側燃料計と、
前記右舷駆動部に供給される燃料の消費量を計測する右舷側燃料計と
を含み、
前記制御部は、前記左舷側燃料計が測定した前記左舷駆動部の左舷燃料消費量と、前記右舷側燃料計が測定した前記右舷駆動部の右舷側燃料消費量とに基づいて、前記左舷プロペラの左舷スラスト量と、前記右舷プロペラの右舷スラスト量とを推定する
船舶の推進装置。
【請求項8】
請求項1乃至5のいずれか一項に記載の船舶の推進装置であって、
前記検知部は、
前記左舷駆動部に供給される電力の出力電圧を計測する左舷側電圧計と、
前記右舷駆動部に供給される電力の出力電圧を計測する右舷側電圧計と
を含み、
前記制御部は、前記左舷側電圧計が測定した前記左舷駆動部の左舷出力電圧と、前記右舷側電圧計が測定した前記右舷駆動部の右舷側出力電圧とに基づいて、前記左舷プロペラの左舷スラスト量と、前記右舷プロペラの右舷スラスト量とを推定する
船舶の推進装置。
【請求項9】
請求項1乃至8のいずれか一項に記載の船舶の推進装置であって、
前記船尾船体は、一軸船型の船尾構造を有する
船舶の推進装置。
【請求項10】
請求項1乃9のいずれか一項に記載の船舶の推進装置を有する船舶。
【請求項11】
船舶の推進方法であって、
ここで、前記船舶は、
左舷プロペラと、
船長方向における前記左舷プロペラの前方又は後方の位置で、翼の一部が前記左舷プロペラの翼とオーバーラップするように設けられた右舷プロペラと、
前記左舷プロペラを駆動する左舷駆動部と、
前記右舷プロペラを駆動する右舷駆動部と、
前記左舷プロペラ及び前記右舷プロペラの駆動に関連する情報を検知する検知部と、
制御部と
を備え、
前記船舶の推進方法は、
前記制御部が、前記検知部が検知した前記左舷プロペラ及び前記右舷プロペラの駆動に関連する情報を取得するステップと、
前記制御部が、前記検知部による検知結果に基づいて、前記左舷プロペラ及び前記右舷プロペラの各々についてスラスト量を推定するステップと、
前記制御部が、推定結果に基づいて、前記左舷のスラストと前記右舷のスラストとが同程度になるように、前記左舷駆動部及び前記右舷駆動部を制御するステップと
を具備する
船舶の推進方法。
【請求項12】
請求項11に記載の船舶の推進方法であって、
前記制御するステップは、
前記制御部が、前記左舷駆動部及び前記右舷駆動部を介して、前記左舷のスラストと前記右舷のスラストとが同程度になるように、前記左舷プロペラ及び前記右舷プロペラの回転数を制御するステップを備える
船舶の推進方法。
【請求項13】
請求項11に記載の船舶の推進方法であって、
前記制御するステップは、
前記制御部が、前記左舷駆動部及び前記右舷駆動部を介して、前記左舷のスラストと前記右舷のスラストとが同程度になるように、可変ピッチプロペラである前記左舷プロペラ及び前記右舷プロペラの翼角を制御するステップを備える
船舶の推進方法。
【請求項14】
請求項11乃至13のいずれか一項に記載の船舶の推進方法であって、
前記推定するステップは、
前記制御部が、前記左舷プロペラ軸に設けられた左舷軸馬力検出部が測定した前記左舷プロペラ軸の左舷軸馬力と、前記右舷プロペラ軸に設けられた右舷軸馬力検出部が測定した前記右舷プロペラ軸の右舷軸馬力とに基づいて、前記左舷プロペラの左舷スラスト量と、前記右舷プロペラの右舷スラスト量とを推定するステップを備える
船舶の推進方法。
【請求項15】
請求項11乃至13のいずれか一項に記載の船舶の推進方法であって、
前記推定するステップは、
前記制御部が、前記左舷駆動部に供給される燃料の消費量を計測する左舷側燃料計が測定した前記左舷駆動部の左舷燃料消費量と、前記右舷駆動部に供給される燃料の消費量を計測する右舷側燃料計が測定した前記右舷駆動部の右舷側燃料消費量とに基づいて、前記左舷プロペラの左舷スラスト量と、前記右舷プロペラの右舷スラスト量とを推定するステップを備える
船舶の推進方法。
【請求項16】
請求項11乃至13のいずれか一項に記載の船舶の推進方法であって、
前記推定するステップは、
前記制御部が、前記左舷駆動部に供給される電力の出力電圧を計測する左舷側電圧計が測定した前記左舷駆動部の左舷出力電圧と、前記右舷駆動部に供給される電力の出力電圧を計測する右舷側電圧計が測定した前記右舷駆動部の右舷側出力電圧とに基づいて、前記左舷プロペラの左舷スラスト量と、前記右舷プロペラの右舷スラスト量を推定するステップを備える
船舶の推進方法。
【請求項17】
請求項11乃至16のいずれか一項に記載の船舶の推進方法をコンピュータに実行させるプログラム。
【請求項1】
左舷プロペラと、
船長方向における前記左舷プロペラの前方又は後方の位置で、翼の一部が前記左舷プロペラの翼とオーバーラップするように設けられた右舷プロペラと、
前記左舷プロペラを駆動する左舷駆動部と、
前記右舷プロペラを駆動する右舷駆動部と、
前記左舷プロペラ及び前記右舷プロペラの駆動に関連する情報を検知する検知部と、
前記検知部による検知結果に基づいて、前記左舷プロペラ及び前記右舷プロペラの各々についてスラスト量を推定する制御部と
を具備し、
前記制御部は、推定結果に基づいて、前記左舷のスラストと前記右舷のスラストとが同程度になるように、前記左舷駆動部及び前記右舷駆動部を制御する
船舶の推進装置。
【請求項2】
請求項1に記載の船舶の推進装置であって、
前記制御部は、前記左舷駆動部及び前記右舷駆動部を介して、前記左舷のスラストと前記右舷のスラストとが同程度になるように、前記左舷プロペラ及び前記右舷プロペラの回転数を制御する
船舶の推進装置。
【請求項3】
請求項2に記載の船舶の推進装置であって、
前記左舷駆動部は、
船尾船体から後方に伸び、前記左舷プロペラに接続された左舷プロペラ軸と、
前記左舷プロペラ軸を駆動する左舷主機部と
を備え、
前記右舷駆動部は、
前記船尾船体から後方に伸び、前記右舷プロペラに接続された右舷プロペラ軸と、
前記右舷プロペラ軸を駆動する右舷主機部と
を備え、
前記制御部は、前記左舷主機部及び前記右舷主機部による前記左舷プロペラ軸及び前記右舷プロペラ軸の回転数の制御により、前記左舷プロペラ及び前記右舷プロペラの回転数を制御する
船舶の推進装置。
【請求項4】
請求項1に記載の船舶の推進装置であって、
前記左舷プロペラ及び前記右舷プロペラは、可変ピッチプロペラであり、
前記制御部は、前記左舷駆動部及び前記右舷駆動部を介して、前記左舷のスラストと前記右舷のスラストとが同程度になるように、前記左舷プロペラ及び前記右舷プロペラの翼角を制御する
船舶の推進装置。
【請求項5】
請求項4に記載の船舶の推進装置であって、
前記左舷駆動部は、
船尾船体から後方に伸び、前記左舷プロペラに接続された左舷プロペラ軸と、
前記左舷プロペラ軸を介して、前記左舷プロペラとしての可変ピッチプロペラの翼角を制御する左舷翼角駆動部と
を備え、
前記右舷駆動部は、
前記船尾船体から後方に伸び、前記右舷プロペラに接続された右舷プロペラ軸と、
前記右舷プロペラ軸を介して、前記右舷プロペラとしての可変ピッチプロペラの翼角を制御する右舷翼角駆動部と
を備え、
前記制御部は、前記左舷翼角駆動部及び右舷翼角駆動部の制御により、前記左舷プロペラ及び前記右舷プロペラの翼角を制御する
船舶の推進装置。
【請求項6】
請求項1乃至5のいずれか一項に記載の船舶の推進装置であって、
前記検知部は、
前記左舷プロペラ軸に設けられた左舷軸馬力検出部と、
前記右舷プロペラ軸に設けられた右舷軸馬力検出部と
を含み、
前記制御部は、前記左舷軸馬力検出部が測定した前記左舷プロペラ軸の左舷軸馬力と、前記右舷軸馬力検出部が測定した前記右舷プロペラ軸の右舷軸馬力とに基づいて、前記左舷プロペラの左舷スラスト量と、前記右舷プロペラの右舷スラスト量とを推定する
船舶の推進装置。
【請求項7】
請求項1乃至5のいずれか一項に記載の船舶の推進装置であって、
前記検知部は、
前記左舷駆動部に供給される燃料の消費量を計測する左舷側燃料計と、
前記右舷駆動部に供給される燃料の消費量を計測する右舷側燃料計と
を含み、
前記制御部は、前記左舷側燃料計が測定した前記左舷駆動部の左舷燃料消費量と、前記右舷側燃料計が測定した前記右舷駆動部の右舷側燃料消費量とに基づいて、前記左舷プロペラの左舷スラスト量と、前記右舷プロペラの右舷スラスト量とを推定する
船舶の推進装置。
【請求項8】
請求項1乃至5のいずれか一項に記載の船舶の推進装置であって、
前記検知部は、
前記左舷駆動部に供給される電力の出力電圧を計測する左舷側電圧計と、
前記右舷駆動部に供給される電力の出力電圧を計測する右舷側電圧計と
を含み、
前記制御部は、前記左舷側電圧計が測定した前記左舷駆動部の左舷出力電圧と、前記右舷側電圧計が測定した前記右舷駆動部の右舷側出力電圧とに基づいて、前記左舷プロペラの左舷スラスト量と、前記右舷プロペラの右舷スラスト量とを推定する
船舶の推進装置。
【請求項9】
請求項1乃至8のいずれか一項に記載の船舶の推進装置であって、
前記船尾船体は、一軸船型の船尾構造を有する
船舶の推進装置。
【請求項10】
請求項1乃9のいずれか一項に記載の船舶の推進装置を有する船舶。
【請求項11】
船舶の推進方法であって、
ここで、前記船舶は、
左舷プロペラと、
船長方向における前記左舷プロペラの前方又は後方の位置で、翼の一部が前記左舷プロペラの翼とオーバーラップするように設けられた右舷プロペラと、
前記左舷プロペラを駆動する左舷駆動部と、
前記右舷プロペラを駆動する右舷駆動部と、
前記左舷プロペラ及び前記右舷プロペラの駆動に関連する情報を検知する検知部と、
制御部と
を備え、
前記船舶の推進方法は、
前記制御部が、前記検知部が検知した前記左舷プロペラ及び前記右舷プロペラの駆動に関連する情報を取得するステップと、
前記制御部が、前記検知部による検知結果に基づいて、前記左舷プロペラ及び前記右舷プロペラの各々についてスラスト量を推定するステップと、
前記制御部が、推定結果に基づいて、前記左舷のスラストと前記右舷のスラストとが同程度になるように、前記左舷駆動部及び前記右舷駆動部を制御するステップと
を具備する
船舶の推進方法。
【請求項12】
請求項11に記載の船舶の推進方法であって、
前記制御するステップは、
前記制御部が、前記左舷駆動部及び前記右舷駆動部を介して、前記左舷のスラストと前記右舷のスラストとが同程度になるように、前記左舷プロペラ及び前記右舷プロペラの回転数を制御するステップを備える
船舶の推進方法。
【請求項13】
請求項11に記載の船舶の推進方法であって、
前記制御するステップは、
前記制御部が、前記左舷駆動部及び前記右舷駆動部を介して、前記左舷のスラストと前記右舷のスラストとが同程度になるように、可変ピッチプロペラである前記左舷プロペラ及び前記右舷プロペラの翼角を制御するステップを備える
船舶の推進方法。
【請求項14】
請求項11乃至13のいずれか一項に記載の船舶の推進方法であって、
前記推定するステップは、
前記制御部が、前記左舷プロペラ軸に設けられた左舷軸馬力検出部が測定した前記左舷プロペラ軸の左舷軸馬力と、前記右舷プロペラ軸に設けられた右舷軸馬力検出部が測定した前記右舷プロペラ軸の右舷軸馬力とに基づいて、前記左舷プロペラの左舷スラスト量と、前記右舷プロペラの右舷スラスト量とを推定するステップを備える
船舶の推進方法。
【請求項15】
請求項11乃至13のいずれか一項に記載の船舶の推進方法であって、
前記推定するステップは、
前記制御部が、前記左舷駆動部に供給される燃料の消費量を計測する左舷側燃料計が測定した前記左舷駆動部の左舷燃料消費量と、前記右舷駆動部に供給される燃料の消費量を計測する右舷側燃料計が測定した前記右舷駆動部の右舷側燃料消費量とに基づいて、前記左舷プロペラの左舷スラスト量と、前記右舷プロペラの右舷スラスト量とを推定するステップを備える
船舶の推進方法。
【請求項16】
請求項11乃至13のいずれか一項に記載の船舶の推進方法であって、
前記推定するステップは、
前記制御部が、前記左舷駆動部に供給される電力の出力電圧を計測する左舷側電圧計が測定した前記左舷駆動部の左舷出力電圧と、前記右舷駆動部に供給される電力の出力電圧を計測する右舷側電圧計が測定した前記右舷駆動部の右舷側出力電圧とに基づいて、前記左舷プロペラの左舷スラスト量と、前記右舷プロペラの右舷スラスト量を推定するステップを備える
船舶の推進方法。
【請求項17】
請求項11乃至16のいずれか一項に記載の船舶の推進方法をコンピュータに実行させるプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−93502(P2011−93502A)
【公開日】平成23年5月12日(2011.5.12)
【国際特許分類】
【出願番号】特願2009−252344(P2009−252344)
【出願日】平成21年11月2日(2009.11.2)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【公開日】平成23年5月12日(2011.5.12)
【国際特許分類】
【出願日】平成21年11月2日(2009.11.2)
【出願人】(000006208)三菱重工業株式会社 (10,378)
[ Back to top ]