
船舶の統合監視のための衛星情報及び船舶情報の統合方法
【課題】本発明は、船舶の統合監視のための衛星情報及び船舶情報の統合方法に関する。
【解決手段】より具体的には、合成開口レーダ(Synthetic Aperture Radar、SAR)から送信される船舶についての情報である衛星情報と、各船舶に搭載された船舶自動識別装置(Automatic Identification System、AIS)から送信される船舶情報とを統合して、前記船舶自動識別装置を搭載し、識別が可能な確認船舶および前記船舶自動識別装置が搭載されていない未確認の船舶をすべて監視することが可能な船舶の統合監視のための衛星情報及び船舶情報の統合方法に関する。
【解決手段】より具体的には、合成開口レーダ(Synthetic Aperture Radar、SAR)から送信される船舶についての情報である衛星情報と、各船舶に搭載された船舶自動識別装置(Automatic Identification System、AIS)から送信される船舶情報とを統合して、前記船舶自動識別装置を搭載し、識別が可能な確認船舶および前記船舶自動識別装置が搭載されていない未確認の船舶をすべて監視することが可能な船舶の統合監視のための衛星情報及び船舶情報の統合方法に関する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、船舶の統合監視(monitoring)のための衛星情報及び船舶情報の統合方法に関し、より具体的には、合成開口レーダ(Synthetic Aperture Radar、SAR)から送信される船舶についての情報である衛星情報と、各船舶に搭載された船舶自動識別装置(Automatic Identification System、AIS)から送信される船舶情報とを統合して、前記船舶自動識別装置を搭載して識別が可能な確認船舶及び前記船舶自動識別装置が搭載されていない未確認の船舶を全て監視できる船舶の統合 監視のための衛星情報及び船舶情報の統合方法に関する。
【背景技術】
【0002】
一般的に、海上で航海中の船舶の航行安全のためには船舶の位置を把握し、監視できるようにすることが重要であるが、そのために船舶自動識別装置(AIS)及びレーダ装置が用いられており、特に、前記レーダ装置には、気象条件の悪化及び視界の不透明な状況でも高画質映像の取得が可能な合成開口レーダ(SAR)の活用が行われる傾向にある。
【0003】
なお、前記船舶自動識別装置は、船舶に搭載されるもので、船舶と船舶、又は、船舶と陸上管制所間の船舶の位置情報や識別情報などを自動的に送受信することにより、海上交通量の多い海峡、交差点、海上通航分離帯(Traffic Separation Schemes)海域で、相手船舶の識別を容易にし、船舶間の衝突防止及び海難捜索救助活動を支援する。
【0004】
なお、前記合成開口レーダは、アンテナから電波を放射した後、反射されてくる電波を測定して映像に復元するもので、主にレーダ衛星又は航空機に搭載され、測定、観測、偵察、及び資源探査などに必要な広い地域の高解像度の映像を撮影することができ、特に、広い地域に対して高精度の観測が可能である。
【0005】
なお、前記合成開口レーダが搭載されたレーダ衛星から送信される衛星信号は、レーダスキャンコンバータ(Radar Scan Converter)のような装置を用いてコンピュータのデータに変換することができ、前記レーダスキャンコンバータは、前記衛星信号を映像化し、また、映像イメージの中の移動体の座標を取得して移動体の位置を識別することもできる。
【0006】
一方、前記船舶自動識別装置は、前記船舶に搭載されなければならないが、前記船舶自動識別装置が搭載されていない未確認の船舶が海上で航行している場合には、海上の他の船舶又は陸上管制所で前記未確認の船舶を容易に識別したり、正確な位置情報を観測しにくい問題点があった。
【0007】
なお、前記船舶自動識別装置の場合には、各船舶に搭載された一般的なレーダを利用して隣接する他の船舶を感知することができるが、陸地に隣接する場合には、周辺の地形の影響を受けて前記他の船舶を容易に感知しにくく、気象条件が悪い場合でも、前記他の船舶を容易に感知できない問題点があった。
【0008】
なお、前記合成開口レーダの場合には、海上の広い範囲に位置した各船舶の位置を監視することができるが、前記の各船舶の位置と大きさの情報のみを得ることができ、前記各船舶の船名と船舶の種類については、識別力を持つことができない問題点があった。
【0009】
つまり、前記船舶自動識別装置から送信される船舶情報と前記合成開口レーダから送信される情報である衛星情報を統合し、航海中の船舶の位置情報を正確に測定できるようにする必要性があり、特に、前記船舶自動識別装置を搭載して識別が可能な船舶及び前記船舶自動識別装置を搭載していない識別が不可能な船舶に対しても、全て監視できる統合的な船舶監視方法の開発が要望されている。
【発明の概要】
【発明が解決しようとする課題】
【0010】
本発明者らは、合成開口レーダから送信される船舶に関する情報である衛星情報と、各船舶に搭載された船舶自動識別装置から送信される船舶情報を統合し、前記船舶自動識別装置を搭載して識別が可能な確認船舶及び前記船舶自動識別装置が搭載されていない未確認の船舶を全て監視することができ、各船舶の位置情報、前記の各船舶を識別できる識別情報及び前記衛星情報及び前記船舶情報間の誤差情報を取得できるようにするために研究を重ねた結果、 船舶の統合監視のための衛星情報と船舶情報の統合方法の技術的構成を開発することになり、本発明を完成することになった。
【0011】
従って、本発明の目的は、前記船舶自動識別装置を搭載して識別が可能な確認船舶及び前記船舶自動識別装置が搭載されていない未確認の船舶に関する位置情報及び識別情報を取得し、統合的に監視することができるようにする船舶の統合監視のための衛星情報及び船舶情報の統合方法を提供することである。
【0012】
なお、本発明の他の目的は、船舶自動識別装置から送信される船舶情報を補正し、前記船舶情報とレーダ衛星から送信される衛星情報を互いにマッチする船舶の統合監視のための衛星情報及び船舶情報の統合方法を提供することである。
【0013】
なお、本発明の又他の目的は、船舶情報上の各船舶の位置情報を補正する際に誤差の発生を最小化し、予測位置情報を算出する船舶の統合監視のための衛星情報と船舶情報の統合方法を提供することである。
【0014】
なお、本発明の又他の目的は、衛星情報上の各船舶の形状情報と船舶情報上の各船舶の識別情報を互いにマッチして、航海中の船舶の船名と船舶の種類などを識別できる船舶の統合監視のための衛星情報及び船舶情報の統合方法を提供することである。
【0015】
本発明の目的は、上述した目的に制限されない。言及されていない他の目的は下記の説明によって当業者に明確に理解されるのであろう。
【課題を解決するための手段】
【0016】
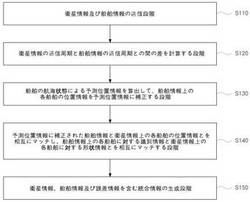
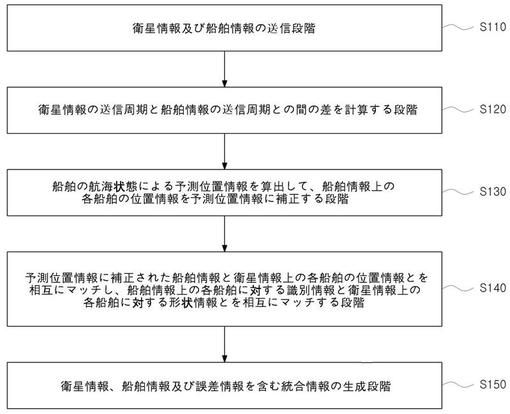
前記の目的を達成するために、本発明は、レーダ衛星から船舶に関する衛星情報が送信され、各船舶に搭載された船舶自動識別装置(AIS)から前記の各船舶の船舶情報が送信される第1段階と、前記各船舶に対する現在の衛星情報の取得時間を抽出した後、前記取得時間と同じ時間での前記各船舶の予測位置情報を算出し、前記船舶情報上の各船舶の位置を前記予測位置情報に補正する第2段階と、前記予測位置情報を含む前記船舶情報及び前記衛星情報が統合された統合情報を生成する第3段階と、を含むことを特徴とする船舶の統合監視のための衛星情報及び船舶情報の統合方法を提供する。
【0017】
望ましい実施例において、前記衛星情報は、前記船舶の位置に関する情報を含み、前記船舶情報は、前記各船舶を識別する船名、船舶の大きさ及び船舶の種類に関する情報である識別情報を含み、前記第2段階及び前記第3段階の間に、前記のそれぞれの予測位置情報と前記衛星情報を比較して、前記衛星情報上の各船舶と前記船舶情報上のそれぞれの識別情報を互いにマッチする第2−1段階をさらに含む。
【0018】
望ましい実施例において、前記レーダ衛星は、前記衛星情報を一定の周期で送信し、前記船舶自動識別装置は、船の速力に応じて変動する周期で前記船舶情報を送信し、前記第1段階及び前記第2段階の間に、前記衛星情報の送信周期と前記船舶情報の送信周期との間の差を計算し、前記予測位置情報の算出時に前記取得時間以前又は以前及び以後の船舶情報中、どの時点での情報を抽出するかを決定する第1−1段階をさらに含む。
【0019】
望ましい実施例において、前記第2段階は、前記衛星情報の取得時間よりも以前の時間に取得された船舶情報から前記船舶が航海した針路及び速度情報を抽出し、前記船舶が前記取得時間と同じ時間に位置するものと推定される位置を前記予測位置情報として算出する。
【0020】
望ましい実施例において、前記第2段階は、DR(dead reckoning)アルゴリズムを用いて前記予測位置情報を算出し、前記DRアルゴリズムは前記船舶情報上で前記船舶の位置である基準位置情報と、前記基準位置情報上で前記船舶の針路及び速度情報を抽出し、前記取得時間上で前記船舶の位置である前記予測位置情報を計算する。
【0021】
望ましい実施例において、前記第2段階は、前記衛星情報の取得時間の以前と以後に取得された船舶情報から前記船舶が移動した位置を抽出し、前記船舶が、前記取得時間と同じ時間に位置するものと推定される位置を前記予測位置情報と算出する。
【0022】
望ましい実施例において、前記衛星情報は、前記レーダ衛星で前記船舶を撮影した映像から抽出され、前記各船舶の大きさ及び形状の情報である形状情報をさらに含み、前記第2−1段階は、前記各船舶の形状情報と前記船舶情報上のそれぞれの識別情報を相互に比較して、前記衛星情報上の各船舶と前記識別情報を互いにマッチする第2−1−1段階をさらに含む。
【0023】
望ましい実施例において、前記統合情報は、前記衛星情報と前記船舶情報との間の誤差の情報である誤差情報を含む。
【0024】
望ましい実施例において、前記レーダ衛星は合成開口レーダ(SAR)を搭載した衛星を備える。
【発明の効果】
【0025】
本発明は、次のような優れた効果がある。
【0026】
まず、本発明の一実施例による船舶の統合監視のための衛星情報及び船舶情報の統合方法によれば、レーダ衛星から送信される衛星情報により船舶自動識別装置を搭載していない船舶に関する情報が送信され、前記船舶自動識別装置から送信される船舶情報により前記船舶自動識別装置を搭載した船舶に関する情報が送信された後、前記衛星情報及び前記船舶情報を統合することにより、前記船舶自動識別装置を搭載し、識別が可能な確認船舶及び前記船舶自動識別装置が搭載されていない未確認船舶を統合的に監視することができる効果が得られる。
【0027】
なお、本発明の一実施例による船舶の統合監視のための衛星情報及び船舶情報の統合方法によれば、衛星情報上の船舶に関する情報と、船舶情報上の船舶に関する情報とを統合するために、前記船舶情報を補正する時に前記衛星情報の取得時間と同じ時間で前記船舶情報上の各船舶の予測位置を算出して前記船舶情報を補正するので、前記衛星情報と前記船舶情報とのマッチングがより正確に行われる効果が得られる。
【0028】
なお、本発明の一実施例による船舶の統合監視のための衛星情報及び船舶情報の統合方法によれば、衛星情報の送信周期と、船舶情報の送信周期の差を計算し、前記衛星情報の取得時間以前、または以前及び以後の船舶情報のうち、どの時点の情報を抽出するかを決定し、予測位置情報を算出するので、船舶情報の補正のための前記予測位置情報の算出時に誤差の発生を最小限にし、より精度の高い予測位置を算出できる効果が得られる。
【0029】
なお、本発明の一実施例による船舶の統合監視のための衛星情報及び船舶情報の統合方法によれば、衛星情報及び船舶情報が統合された統合情報の生成時に前記各船舶の位置情報のみでなく、前記衛星情報に含まれている船舶の形状情報及び前記船舶情報上の識別情報をマッチし、前記統合情報を生成するので、前記統合情報により海上で航海中の船舶に対する位置情報と、前記各船舶の船名、船舶の種類を識別できる効果が得られる。
【図面の簡単な説明】
【0030】
【図1】本発明の一実施例による衛星情報及び船舶情報の統合方法を示す概念図である。
【図2】本発明の一実施例による衛星情報及び船舶情報の統合方法を示すブロック図である。
【発明を実施するための形態】
【0031】
以下、添付の図面及び望ましい実施例を參照して本発明の技術的な構成を詳細に説明する。
【0032】
但し、本発明はこれらの実施例に限定されるものではない。明細書の全体にわたって同一な構成要素に対しては同一な符号を付す。
【0033】
図1は、本発明の一実施例による衛星情報及び船舶情報の統合方法を示す概念図であり、図2は、本発明の一実施例による衛星情報及び船舶情報の統合方法を示すブロック図である。
【0034】
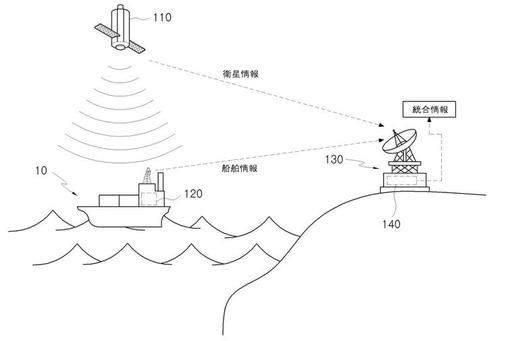
図1〜図2を参照すれば、本発明の一実施例による船舶の統合監視のための衛星情報及び船舶情報の統合方法は、レーダ衛星110から送信される船舶10に対する情報である衛星情報と、各船舶10に搭載された船舶自動識別装置(Automatic Identification System、AIS)120から送信される船舶情報を統合するためのもので、海上で航海中の船舶10の位置情報と、各船舶10の船名及び船舶の種類のような識別情報を同時に取得することができる。
【0035】
なお、前記レーダ衛星110は、海や港に停泊した船舶10に対する情報を収集するもので、種々の形態のレーダを搭載した衛星が使用できるが、本発明の一実施例では、合成開口レーダ(Synthetic Aperture Radar、SAR)を搭載した衛星を備える。
【0036】
なお、前記レーダ衛星110は、前記船舶10の情報を収集するのみでなく、前記合成開口レーダを利用して海流の流れ及び波などの情報を含む海洋情報、地形又は地質構造についての情報である地理情報、海氷又は氷河の情報である氷雪情報、川又は湖の面積と、湿地帯の分類及び植生についての情報である水文情報、農作物の耕作面積又は農作物の災害状況についての情報である農作物情報又は道路、線路、橋、工場や都市の情報である都市情報をさらに収集することもできる。
【0037】
なお、本発明の一実施例で前記レーダ衛星110は、海上で航海する船舶10の位置情報及び形状情報を含む衛星情報を収集することになる。
【0038】
なお、前記船舶自動識別装置120は、船舶10に搭載されるもので、各船舶10の船名、船舶の種類、船舶の大きさ、針路および位置に関する情報である船舶情報を提供し、船舶10間の事故を防止する。
【0039】
なお、前記衛星情報及び前記船舶情報は、情報統合システム130で統合されることになり、前記情報統合システム130は、前記レーダ衛星110から前記衛星情報が送信されて前記各船舶10の船舶自動識別装置120から前記船舶情報が送信される。
【0040】
なお、前記情報統合システム130は、例えば、港湾や入港路及び出港路を航行したり移動する船舶10の動きを観察して、前記船舶10に航行安全に必要な情報を提供する海上交通管制システム(Vessel Traffic Service)からなる。
【0041】
なお、前記情報統合システム130は、前記衛星情報及び前記船舶情報を処理するための情報統合プログラム140を備えることになるが、前記情報統合プログラム140は、前記情報統合システム130が、前記衛星情報から各船舶10の位置情報及び形状情報を抽出するように機能し、前記船舶情報から各船舶10の位置情報及び識別情報を抽出するように機能する。なお、前記情報統合プログラム140は、前記情報統合システム130が、前記衛星情報及び前記船舶情報に対する処理及び統合情報を生成するように機能する。
【0042】
まず、本発明の一実施例による船舶の統合監視のための衛星情報及び船舶情報の統合方法は、前記統合情報システム130に前記衛星情報及び前記船舶情報が送信されることになる。
【0043】
なお、前記衛星情報は、前記レーダ衛星110で前記船舶10を撮影した映像から抽出されるものであるが、前記船舶10の位置に関する情報を含み、前記各船舶10の大きさ及び形状の情報である形状情報を含む。
【0044】
なお、前記船舶情報は、前記各船舶10の位置情報と、前記各船舶10を識別できる船名、船舶の大きさ及び船舶の種類ついての情報である識別情報とを含む。
【0045】
一方、前記船舶情報に含まれた前記識別情報により海上で航海する船舶10を確認することができるが、前記海上には、識別が可能な確認船舶以外にも、前記船舶自動識別装置120を搭載していない識別が不可能な未確認の船舶も存在することになる。この時、前記レーダ衛星110から送信される前記衛星情報は、前記未確認船舶の位置情報及び形状情報を取得できるようになる(S110)。
【0046】
次に、前記衛星情報の送信周期と前記船舶情報の送信周期との間の差のΔtを計算することになるが、これは、前記衛星情報の場合には、一定の周期で送信される一方、前記船舶情報の場合には、各船舶10の航行速度に応じて送信周期が変動されるので、前記Δtを計算して前記各船舶10の予測位置情報をより正確に計算するためである。
【0047】
この時、前記衛星情報と前記船舶情報とは、互いに取得された時間が同一であることもあるが、前記船舶情報の送信周期の変動に伴い、前記衛星情報と前記船舶情報の取得時間は、前記Δtの値だけ差を持つようになる。また、前記予測位置情報は、前記衛星情報の取得時間と同じ時間で前記船舶情報上の各船舶10の位置を推定したものである。
【0048】
なお、前記Δtを計算した後に、前記Δtの値が一定の臨界値よりも高い値を持つか又は同等か低い値を持つかを判別することになり、本発明の一実施例では、前記臨界値を1分に設定している。
【0049】
なお、前記Δtが前記臨界値よりも高い値を持つ場合には、現在、衛星情報の取得時間以前の船舶情報から前記各船舶10に関する情報を抽出する。
【0050】
なお、前記Δtが前記臨界値と同じか、低い値を持つ場合には、現在の衛星情報の取得時間以前と以後の船舶情報から前記各船舶に関する情報を抽出する。
【0051】
つまり、前記衛星情報及び前記船舶情報の送信周期との間の差の値を計算する簡単な方法で、船舶情報のうち、どの時点の船舶情報を抽出するかを決定することになる(S120)。
【0052】
次に、前記船舶情報上の各船舶10の位置情報を補正することになるが、この時、前記現在の衛星情報の取得時間と同じ時間での前記各船舶10の予測位置を推定した後、各船舶情報上の各船舶10の位置を予測位置情報に補正することになる。
【0053】
なお、前記取得時間は前記レーダ衛星110で前記各船舶10の映像を撮影して位置情報及び形状情報を取得した時間を意味し、前記現在の衛星情報の取得時間は、現在、統合しようとする衛星情報の取得時間を意味する。
【0054】
なお、前記船舶情報上の各船舶10の位置情報を補正する時に、前記Δtが前記の臨界値より高い値を持つ場合には、前記衛星情報の取得時間よりも以前の時間に取得された船舶情報から前記船舶10が航行した針路や速度情報を抽出した後、前記船舶10が、前記取得時間と同じ時間に位置すると推定される位置を前記予測位置情報に算出し、前記船舶情報上の船舶10の位置情報を補正する。
【0055】
この時には、DR(dead reckoning)アルゴリズムを用いて、前記予測位置情報を算出することができ、前記予測位置情報を算出するためには、前記船舶情報上から前記船舶10の位置である基準位置情報を算出することになるが、前記基準位置情報は、前記取得時間よりも以前の時間の値を持つ。
【0056】
なお、前記DRアルゴリズムは、すでに位置を知っている移動物体の進行方向、進行速度や方向角などの情報を利用して、前記移動物体が、一定の時間の経過後に移動すると推定される新しい位置を計算するアルゴリズムを意味する。
【0057】
つまり、前記DRアルゴリズムを用いて、前記基準位置情報から前記船舶10の針路及び速度情報を抽出することになるが、この時、前記船舶10が航行することになると推定される針路の推定針路を計算し、前記推定針路上で前記船舶10の速度情報を計算し、前記取得時間と同じ時間に前記船舶10が位置すると推定される位置を前記の予測位置情報に算出する。
【0058】
なお、前記DRアルゴリズムは、前記情報統合システム130に備られた前記情報統合プログラム140に搭載され、前記船舶の前記予測位置情報に算出するように機能させることができる。
【0059】
つまり、前記船舶10が以前に航海した針路及び位置に関する情報と、前記船舶の速度に関する情報を利用して、一定の時点で、前記船舶が位置すると予測されるポイントを前記の予測位置情報に算出することになる。
【0060】
一方、前記船舶情報上の各船舶10の位置情報を補正する時に、前記Δtが前記臨界値と同じか、低い値を持つ場合には、前記衛星情報の取得時間よりも以前の時間に取得された船舶情報と、前記衛星情報の取得時間より以後の時間に取得された船舶情報とを抽出し、前記船舶が、前記取得時間と同じ時間に位置すると推定される位置を前記予測位置情報に算出する。
【0061】
なお、前記Δtが前記臨界値と同じか、低い値を持つ場合は、通常、船舶10が海上で航海した距離が短かったり、固定された状態であり、この時には、前記デッドレコーニング(dead reckonign)を用いると、前記予測位置情報の正確な算出が難しく、誤差が大きく発生するので、前記衛星情報の取得時間の以前及び以後に取得された船舶情報から前記船舶10が移動した位置を抽出するようにする。
【0062】
なお、前記衛星情報の取得時間よりも以前の時間に取得された船舶情報上で各船舶10の針路及び位置の情報である第1位置情報を算出し、前記衛星情報の取得時間より以後の時間に取得された船舶情報上で各船舶10の針路及び位置に関する情報である第2位置情報を算出した後、前記第1位置情報と前記第2位置情報とを相互に比較して、前記船舶10が、前記取得時間と同じ時間に位置すると推定される位置を前記予測位置情報に算出する。
【0063】
なお、前記予測位置情報を算出した後には、前記船舶情報上の各船舶10の位置を前記予測位置情報上の予測位置に補正することになる(S130)。
【0064】
次に、船舶情報上の各船舶10の位置情報を各予測位置情報に補正した後に、前記各予測位置情報に補正された船舶情報上の各船舶10と、前記衛星情報上の各船舶10とをマッチすることになる。
【0065】
この時、前記衛星情報上の各船舶10の位置と、前記予測位置に補正された前記船舶情報上の各船舶10の位置とを相互に比較して、同一または最も近い位置を持つ場合に互いに同一の船舶と判断し、マッチングが行われるようになる。
【0066】
なお、前記の船舶情報及び前記衛星情報を相互にマッチする時、前記衛星情報に含まれた形状情報と、前記船舶情報に含まれた識別情報とも比較するにことになるが、前記形状情報は、前記レーダ衛星で撮影された映像から抽出された前記船舶の具体的な形状についての情報であり、前記識別情報は、前記船舶10の実質的な大きさ、長さおよび幅に関する情報である。
【0067】
なお、前記衛星情報上の各船舶10と、前記船舶情報上の各船舶10の位置に対する情報のみでなく、前記各船舶10の形態に対する情報も比較してマッチすることにより、前記船舶情報及び前記衛星情報のマッチング時、誤差の発生を最小限にし、より高い精度でマッチングが行われることになる。
【0068】
なお、前記衛星情報と前記船舶情報とをマッチする時、前記予測位置を中心とする一定の範囲を検索範囲として設定し、その範囲内に位置する前記衛星情報上の船舶10のみをマッチすることもできる。
【0069】
つまり、前記船舶情報は、前記各船舶10の船名、大きさ、船舶の種類等の識別情報を含んでいる一方、前記衛星情報の場合には、前記各船舶10を識別するのが難しいので、前記衛星情報上の各船舶と、前記船舶情報上の各船舶とをマッチすることにより、前記衛星情報上の各船舶10が識別力を持つようになる(S140)。
【0070】
次に、前記予測位置情報を含む、前記船舶情報及び前記衛星情報が統合された統合情報を生成することになるが、前記統合情報は、前記衛星情報に含まれている前記各船舶10の位置情報及び形状情報を含み、前記船舶情報上の前記各船舶10の識別情報及び前記予測位置情報を含む。
【0071】
なお、前記統合情報は、前記衛星情報と前記船舶情報との間の誤差情報を含んでいるが、前記誤差情報は、前記星情報上の各船舶の位置及び形状に関する情報と、前記船舶情報上の各船舶の予測位置情報及び識別情報を相互に比較した差を示すものである。
【0072】
つまり、前記統合情報は、前記衛星情報及び前記船舶情報が含まれ、なお、前記誤差情報まで含むようになる(S150)。
【符号の説明】
【0073】
110 レーダ衛星
120 船舶自動識別装置
130 情報統合システム
140 情報統合プログラム
【技術分野】
【0001】
本発明は、船舶の統合監視(monitoring)のための衛星情報及び船舶情報の統合方法に関し、より具体的には、合成開口レーダ(Synthetic Aperture Radar、SAR)から送信される船舶についての情報である衛星情報と、各船舶に搭載された船舶自動識別装置(Automatic Identification System、AIS)から送信される船舶情報とを統合して、前記船舶自動識別装置を搭載して識別が可能な確認船舶及び前記船舶自動識別装置が搭載されていない未確認の船舶を全て監視できる船舶の統合 監視のための衛星情報及び船舶情報の統合方法に関する。
【背景技術】
【0002】
一般的に、海上で航海中の船舶の航行安全のためには船舶の位置を把握し、監視できるようにすることが重要であるが、そのために船舶自動識別装置(AIS)及びレーダ装置が用いられており、特に、前記レーダ装置には、気象条件の悪化及び視界の不透明な状況でも高画質映像の取得が可能な合成開口レーダ(SAR)の活用が行われる傾向にある。
【0003】
なお、前記船舶自動識別装置は、船舶に搭載されるもので、船舶と船舶、又は、船舶と陸上管制所間の船舶の位置情報や識別情報などを自動的に送受信することにより、海上交通量の多い海峡、交差点、海上通航分離帯(Traffic Separation Schemes)海域で、相手船舶の識別を容易にし、船舶間の衝突防止及び海難捜索救助活動を支援する。
【0004】
なお、前記合成開口レーダは、アンテナから電波を放射した後、反射されてくる電波を測定して映像に復元するもので、主にレーダ衛星又は航空機に搭載され、測定、観測、偵察、及び資源探査などに必要な広い地域の高解像度の映像を撮影することができ、特に、広い地域に対して高精度の観測が可能である。
【0005】
なお、前記合成開口レーダが搭載されたレーダ衛星から送信される衛星信号は、レーダスキャンコンバータ(Radar Scan Converter)のような装置を用いてコンピュータのデータに変換することができ、前記レーダスキャンコンバータは、前記衛星信号を映像化し、また、映像イメージの中の移動体の座標を取得して移動体の位置を識別することもできる。
【0006】
一方、前記船舶自動識別装置は、前記船舶に搭載されなければならないが、前記船舶自動識別装置が搭載されていない未確認の船舶が海上で航行している場合には、海上の他の船舶又は陸上管制所で前記未確認の船舶を容易に識別したり、正確な位置情報を観測しにくい問題点があった。
【0007】
なお、前記船舶自動識別装置の場合には、各船舶に搭載された一般的なレーダを利用して隣接する他の船舶を感知することができるが、陸地に隣接する場合には、周辺の地形の影響を受けて前記他の船舶を容易に感知しにくく、気象条件が悪い場合でも、前記他の船舶を容易に感知できない問題点があった。
【0008】
なお、前記合成開口レーダの場合には、海上の広い範囲に位置した各船舶の位置を監視することができるが、前記の各船舶の位置と大きさの情報のみを得ることができ、前記各船舶の船名と船舶の種類については、識別力を持つことができない問題点があった。
【0009】
つまり、前記船舶自動識別装置から送信される船舶情報と前記合成開口レーダから送信される情報である衛星情報を統合し、航海中の船舶の位置情報を正確に測定できるようにする必要性があり、特に、前記船舶自動識別装置を搭載して識別が可能な船舶及び前記船舶自動識別装置を搭載していない識別が不可能な船舶に対しても、全て監視できる統合的な船舶監視方法の開発が要望されている。
【発明の概要】
【発明が解決しようとする課題】
【0010】
本発明者らは、合成開口レーダから送信される船舶に関する情報である衛星情報と、各船舶に搭載された船舶自動識別装置から送信される船舶情報を統合し、前記船舶自動識別装置を搭載して識別が可能な確認船舶及び前記船舶自動識別装置が搭載されていない未確認の船舶を全て監視することができ、各船舶の位置情報、前記の各船舶を識別できる識別情報及び前記衛星情報及び前記船舶情報間の誤差情報を取得できるようにするために研究を重ねた結果、 船舶の統合監視のための衛星情報と船舶情報の統合方法の技術的構成を開発することになり、本発明を完成することになった。
【0011】
従って、本発明の目的は、前記船舶自動識別装置を搭載して識別が可能な確認船舶及び前記船舶自動識別装置が搭載されていない未確認の船舶に関する位置情報及び識別情報を取得し、統合的に監視することができるようにする船舶の統合監視のための衛星情報及び船舶情報の統合方法を提供することである。
【0012】
なお、本発明の他の目的は、船舶自動識別装置から送信される船舶情報を補正し、前記船舶情報とレーダ衛星から送信される衛星情報を互いにマッチする船舶の統合監視のための衛星情報及び船舶情報の統合方法を提供することである。
【0013】
なお、本発明の又他の目的は、船舶情報上の各船舶の位置情報を補正する際に誤差の発生を最小化し、予測位置情報を算出する船舶の統合監視のための衛星情報と船舶情報の統合方法を提供することである。
【0014】
なお、本発明の又他の目的は、衛星情報上の各船舶の形状情報と船舶情報上の各船舶の識別情報を互いにマッチして、航海中の船舶の船名と船舶の種類などを識別できる船舶の統合監視のための衛星情報及び船舶情報の統合方法を提供することである。
【0015】
本発明の目的は、上述した目的に制限されない。言及されていない他の目的は下記の説明によって当業者に明確に理解されるのであろう。
【課題を解決するための手段】
【0016】
前記の目的を達成するために、本発明は、レーダ衛星から船舶に関する衛星情報が送信され、各船舶に搭載された船舶自動識別装置(AIS)から前記の各船舶の船舶情報が送信される第1段階と、前記各船舶に対する現在の衛星情報の取得時間を抽出した後、前記取得時間と同じ時間での前記各船舶の予測位置情報を算出し、前記船舶情報上の各船舶の位置を前記予測位置情報に補正する第2段階と、前記予測位置情報を含む前記船舶情報及び前記衛星情報が統合された統合情報を生成する第3段階と、を含むことを特徴とする船舶の統合監視のための衛星情報及び船舶情報の統合方法を提供する。
【0017】
望ましい実施例において、前記衛星情報は、前記船舶の位置に関する情報を含み、前記船舶情報は、前記各船舶を識別する船名、船舶の大きさ及び船舶の種類に関する情報である識別情報を含み、前記第2段階及び前記第3段階の間に、前記のそれぞれの予測位置情報と前記衛星情報を比較して、前記衛星情報上の各船舶と前記船舶情報上のそれぞれの識別情報を互いにマッチする第2−1段階をさらに含む。
【0018】
望ましい実施例において、前記レーダ衛星は、前記衛星情報を一定の周期で送信し、前記船舶自動識別装置は、船の速力に応じて変動する周期で前記船舶情報を送信し、前記第1段階及び前記第2段階の間に、前記衛星情報の送信周期と前記船舶情報の送信周期との間の差を計算し、前記予測位置情報の算出時に前記取得時間以前又は以前及び以後の船舶情報中、どの時点での情報を抽出するかを決定する第1−1段階をさらに含む。
【0019】
望ましい実施例において、前記第2段階は、前記衛星情報の取得時間よりも以前の時間に取得された船舶情報から前記船舶が航海した針路及び速度情報を抽出し、前記船舶が前記取得時間と同じ時間に位置するものと推定される位置を前記予測位置情報として算出する。
【0020】
望ましい実施例において、前記第2段階は、DR(dead reckoning)アルゴリズムを用いて前記予測位置情報を算出し、前記DRアルゴリズムは前記船舶情報上で前記船舶の位置である基準位置情報と、前記基準位置情報上で前記船舶の針路及び速度情報を抽出し、前記取得時間上で前記船舶の位置である前記予測位置情報を計算する。
【0021】
望ましい実施例において、前記第2段階は、前記衛星情報の取得時間の以前と以後に取得された船舶情報から前記船舶が移動した位置を抽出し、前記船舶が、前記取得時間と同じ時間に位置するものと推定される位置を前記予測位置情報と算出する。
【0022】
望ましい実施例において、前記衛星情報は、前記レーダ衛星で前記船舶を撮影した映像から抽出され、前記各船舶の大きさ及び形状の情報である形状情報をさらに含み、前記第2−1段階は、前記各船舶の形状情報と前記船舶情報上のそれぞれの識別情報を相互に比較して、前記衛星情報上の各船舶と前記識別情報を互いにマッチする第2−1−1段階をさらに含む。
【0023】
望ましい実施例において、前記統合情報は、前記衛星情報と前記船舶情報との間の誤差の情報である誤差情報を含む。
【0024】
望ましい実施例において、前記レーダ衛星は合成開口レーダ(SAR)を搭載した衛星を備える。
【発明の効果】
【0025】
本発明は、次のような優れた効果がある。
【0026】
まず、本発明の一実施例による船舶の統合監視のための衛星情報及び船舶情報の統合方法によれば、レーダ衛星から送信される衛星情報により船舶自動識別装置を搭載していない船舶に関する情報が送信され、前記船舶自動識別装置から送信される船舶情報により前記船舶自動識別装置を搭載した船舶に関する情報が送信された後、前記衛星情報及び前記船舶情報を統合することにより、前記船舶自動識別装置を搭載し、識別が可能な確認船舶及び前記船舶自動識別装置が搭載されていない未確認船舶を統合的に監視することができる効果が得られる。
【0027】
なお、本発明の一実施例による船舶の統合監視のための衛星情報及び船舶情報の統合方法によれば、衛星情報上の船舶に関する情報と、船舶情報上の船舶に関する情報とを統合するために、前記船舶情報を補正する時に前記衛星情報の取得時間と同じ時間で前記船舶情報上の各船舶の予測位置を算出して前記船舶情報を補正するので、前記衛星情報と前記船舶情報とのマッチングがより正確に行われる効果が得られる。
【0028】
なお、本発明の一実施例による船舶の統合監視のための衛星情報及び船舶情報の統合方法によれば、衛星情報の送信周期と、船舶情報の送信周期の差を計算し、前記衛星情報の取得時間以前、または以前及び以後の船舶情報のうち、どの時点の情報を抽出するかを決定し、予測位置情報を算出するので、船舶情報の補正のための前記予測位置情報の算出時に誤差の発生を最小限にし、より精度の高い予測位置を算出できる効果が得られる。
【0029】
なお、本発明の一実施例による船舶の統合監視のための衛星情報及び船舶情報の統合方法によれば、衛星情報及び船舶情報が統合された統合情報の生成時に前記各船舶の位置情報のみでなく、前記衛星情報に含まれている船舶の形状情報及び前記船舶情報上の識別情報をマッチし、前記統合情報を生成するので、前記統合情報により海上で航海中の船舶に対する位置情報と、前記各船舶の船名、船舶の種類を識別できる効果が得られる。
【図面の簡単な説明】
【0030】
【図1】本発明の一実施例による衛星情報及び船舶情報の統合方法を示す概念図である。
【図2】本発明の一実施例による衛星情報及び船舶情報の統合方法を示すブロック図である。
【発明を実施するための形態】
【0031】
以下、添付の図面及び望ましい実施例を參照して本発明の技術的な構成を詳細に説明する。
【0032】
但し、本発明はこれらの実施例に限定されるものではない。明細書の全体にわたって同一な構成要素に対しては同一な符号を付す。
【0033】
図1は、本発明の一実施例による衛星情報及び船舶情報の統合方法を示す概念図であり、図2は、本発明の一実施例による衛星情報及び船舶情報の統合方法を示すブロック図である。
【0034】
図1〜図2を参照すれば、本発明の一実施例による船舶の統合監視のための衛星情報及び船舶情報の統合方法は、レーダ衛星110から送信される船舶10に対する情報である衛星情報と、各船舶10に搭載された船舶自動識別装置(Automatic Identification System、AIS)120から送信される船舶情報を統合するためのもので、海上で航海中の船舶10の位置情報と、各船舶10の船名及び船舶の種類のような識別情報を同時に取得することができる。
【0035】
なお、前記レーダ衛星110は、海や港に停泊した船舶10に対する情報を収集するもので、種々の形態のレーダを搭載した衛星が使用できるが、本発明の一実施例では、合成開口レーダ(Synthetic Aperture Radar、SAR)を搭載した衛星を備える。
【0036】
なお、前記レーダ衛星110は、前記船舶10の情報を収集するのみでなく、前記合成開口レーダを利用して海流の流れ及び波などの情報を含む海洋情報、地形又は地質構造についての情報である地理情報、海氷又は氷河の情報である氷雪情報、川又は湖の面積と、湿地帯の分類及び植生についての情報である水文情報、農作物の耕作面積又は農作物の災害状況についての情報である農作物情報又は道路、線路、橋、工場や都市の情報である都市情報をさらに収集することもできる。
【0037】
なお、本発明の一実施例で前記レーダ衛星110は、海上で航海する船舶10の位置情報及び形状情報を含む衛星情報を収集することになる。
【0038】
なお、前記船舶自動識別装置120は、船舶10に搭載されるもので、各船舶10の船名、船舶の種類、船舶の大きさ、針路および位置に関する情報である船舶情報を提供し、船舶10間の事故を防止する。
【0039】
なお、前記衛星情報及び前記船舶情報は、情報統合システム130で統合されることになり、前記情報統合システム130は、前記レーダ衛星110から前記衛星情報が送信されて前記各船舶10の船舶自動識別装置120から前記船舶情報が送信される。
【0040】
なお、前記情報統合システム130は、例えば、港湾や入港路及び出港路を航行したり移動する船舶10の動きを観察して、前記船舶10に航行安全に必要な情報を提供する海上交通管制システム(Vessel Traffic Service)からなる。
【0041】
なお、前記情報統合システム130は、前記衛星情報及び前記船舶情報を処理するための情報統合プログラム140を備えることになるが、前記情報統合プログラム140は、前記情報統合システム130が、前記衛星情報から各船舶10の位置情報及び形状情報を抽出するように機能し、前記船舶情報から各船舶10の位置情報及び識別情報を抽出するように機能する。なお、前記情報統合プログラム140は、前記情報統合システム130が、前記衛星情報及び前記船舶情報に対する処理及び統合情報を生成するように機能する。
【0042】
まず、本発明の一実施例による船舶の統合監視のための衛星情報及び船舶情報の統合方法は、前記統合情報システム130に前記衛星情報及び前記船舶情報が送信されることになる。
【0043】
なお、前記衛星情報は、前記レーダ衛星110で前記船舶10を撮影した映像から抽出されるものであるが、前記船舶10の位置に関する情報を含み、前記各船舶10の大きさ及び形状の情報である形状情報を含む。
【0044】
なお、前記船舶情報は、前記各船舶10の位置情報と、前記各船舶10を識別できる船名、船舶の大きさ及び船舶の種類ついての情報である識別情報とを含む。
【0045】
一方、前記船舶情報に含まれた前記識別情報により海上で航海する船舶10を確認することができるが、前記海上には、識別が可能な確認船舶以外にも、前記船舶自動識別装置120を搭載していない識別が不可能な未確認の船舶も存在することになる。この時、前記レーダ衛星110から送信される前記衛星情報は、前記未確認船舶の位置情報及び形状情報を取得できるようになる(S110)。
【0046】
次に、前記衛星情報の送信周期と前記船舶情報の送信周期との間の差のΔtを計算することになるが、これは、前記衛星情報の場合には、一定の周期で送信される一方、前記船舶情報の場合には、各船舶10の航行速度に応じて送信周期が変動されるので、前記Δtを計算して前記各船舶10の予測位置情報をより正確に計算するためである。
【0047】
この時、前記衛星情報と前記船舶情報とは、互いに取得された時間が同一であることもあるが、前記船舶情報の送信周期の変動に伴い、前記衛星情報と前記船舶情報の取得時間は、前記Δtの値だけ差を持つようになる。また、前記予測位置情報は、前記衛星情報の取得時間と同じ時間で前記船舶情報上の各船舶10の位置を推定したものである。
【0048】
なお、前記Δtを計算した後に、前記Δtの値が一定の臨界値よりも高い値を持つか又は同等か低い値を持つかを判別することになり、本発明の一実施例では、前記臨界値を1分に設定している。
【0049】
なお、前記Δtが前記臨界値よりも高い値を持つ場合には、現在、衛星情報の取得時間以前の船舶情報から前記各船舶10に関する情報を抽出する。
【0050】
なお、前記Δtが前記臨界値と同じか、低い値を持つ場合には、現在の衛星情報の取得時間以前と以後の船舶情報から前記各船舶に関する情報を抽出する。
【0051】
つまり、前記衛星情報及び前記船舶情報の送信周期との間の差の値を計算する簡単な方法で、船舶情報のうち、どの時点の船舶情報を抽出するかを決定することになる(S120)。
【0052】
次に、前記船舶情報上の各船舶10の位置情報を補正することになるが、この時、前記現在の衛星情報の取得時間と同じ時間での前記各船舶10の予測位置を推定した後、各船舶情報上の各船舶10の位置を予測位置情報に補正することになる。
【0053】
なお、前記取得時間は前記レーダ衛星110で前記各船舶10の映像を撮影して位置情報及び形状情報を取得した時間を意味し、前記現在の衛星情報の取得時間は、現在、統合しようとする衛星情報の取得時間を意味する。
【0054】
なお、前記船舶情報上の各船舶10の位置情報を補正する時に、前記Δtが前記の臨界値より高い値を持つ場合には、前記衛星情報の取得時間よりも以前の時間に取得された船舶情報から前記船舶10が航行した針路や速度情報を抽出した後、前記船舶10が、前記取得時間と同じ時間に位置すると推定される位置を前記予測位置情報に算出し、前記船舶情報上の船舶10の位置情報を補正する。
【0055】
この時には、DR(dead reckoning)アルゴリズムを用いて、前記予測位置情報を算出することができ、前記予測位置情報を算出するためには、前記船舶情報上から前記船舶10の位置である基準位置情報を算出することになるが、前記基準位置情報は、前記取得時間よりも以前の時間の値を持つ。
【0056】
なお、前記DRアルゴリズムは、すでに位置を知っている移動物体の進行方向、進行速度や方向角などの情報を利用して、前記移動物体が、一定の時間の経過後に移動すると推定される新しい位置を計算するアルゴリズムを意味する。
【0057】
つまり、前記DRアルゴリズムを用いて、前記基準位置情報から前記船舶10の針路及び速度情報を抽出することになるが、この時、前記船舶10が航行することになると推定される針路の推定針路を計算し、前記推定針路上で前記船舶10の速度情報を計算し、前記取得時間と同じ時間に前記船舶10が位置すると推定される位置を前記の予測位置情報に算出する。
【0058】
なお、前記DRアルゴリズムは、前記情報統合システム130に備られた前記情報統合プログラム140に搭載され、前記船舶の前記予測位置情報に算出するように機能させることができる。
【0059】
つまり、前記船舶10が以前に航海した針路及び位置に関する情報と、前記船舶の速度に関する情報を利用して、一定の時点で、前記船舶が位置すると予測されるポイントを前記の予測位置情報に算出することになる。
【0060】
一方、前記船舶情報上の各船舶10の位置情報を補正する時に、前記Δtが前記臨界値と同じか、低い値を持つ場合には、前記衛星情報の取得時間よりも以前の時間に取得された船舶情報と、前記衛星情報の取得時間より以後の時間に取得された船舶情報とを抽出し、前記船舶が、前記取得時間と同じ時間に位置すると推定される位置を前記予測位置情報に算出する。
【0061】
なお、前記Δtが前記臨界値と同じか、低い値を持つ場合は、通常、船舶10が海上で航海した距離が短かったり、固定された状態であり、この時には、前記デッドレコーニング(dead reckonign)を用いると、前記予測位置情報の正確な算出が難しく、誤差が大きく発生するので、前記衛星情報の取得時間の以前及び以後に取得された船舶情報から前記船舶10が移動した位置を抽出するようにする。
【0062】
なお、前記衛星情報の取得時間よりも以前の時間に取得された船舶情報上で各船舶10の針路及び位置の情報である第1位置情報を算出し、前記衛星情報の取得時間より以後の時間に取得された船舶情報上で各船舶10の針路及び位置に関する情報である第2位置情報を算出した後、前記第1位置情報と前記第2位置情報とを相互に比較して、前記船舶10が、前記取得時間と同じ時間に位置すると推定される位置を前記予測位置情報に算出する。
【0063】
なお、前記予測位置情報を算出した後には、前記船舶情報上の各船舶10の位置を前記予測位置情報上の予測位置に補正することになる(S130)。
【0064】
次に、船舶情報上の各船舶10の位置情報を各予測位置情報に補正した後に、前記各予測位置情報に補正された船舶情報上の各船舶10と、前記衛星情報上の各船舶10とをマッチすることになる。
【0065】
この時、前記衛星情報上の各船舶10の位置と、前記予測位置に補正された前記船舶情報上の各船舶10の位置とを相互に比較して、同一または最も近い位置を持つ場合に互いに同一の船舶と判断し、マッチングが行われるようになる。
【0066】
なお、前記の船舶情報及び前記衛星情報を相互にマッチする時、前記衛星情報に含まれた形状情報と、前記船舶情報に含まれた識別情報とも比較するにことになるが、前記形状情報は、前記レーダ衛星で撮影された映像から抽出された前記船舶の具体的な形状についての情報であり、前記識別情報は、前記船舶10の実質的な大きさ、長さおよび幅に関する情報である。
【0067】
なお、前記衛星情報上の各船舶10と、前記船舶情報上の各船舶10の位置に対する情報のみでなく、前記各船舶10の形態に対する情報も比較してマッチすることにより、前記船舶情報及び前記衛星情報のマッチング時、誤差の発生を最小限にし、より高い精度でマッチングが行われることになる。
【0068】
なお、前記衛星情報と前記船舶情報とをマッチする時、前記予測位置を中心とする一定の範囲を検索範囲として設定し、その範囲内に位置する前記衛星情報上の船舶10のみをマッチすることもできる。
【0069】
つまり、前記船舶情報は、前記各船舶10の船名、大きさ、船舶の種類等の識別情報を含んでいる一方、前記衛星情報の場合には、前記各船舶10を識別するのが難しいので、前記衛星情報上の各船舶と、前記船舶情報上の各船舶とをマッチすることにより、前記衛星情報上の各船舶10が識別力を持つようになる(S140)。
【0070】
次に、前記予測位置情報を含む、前記船舶情報及び前記衛星情報が統合された統合情報を生成することになるが、前記統合情報は、前記衛星情報に含まれている前記各船舶10の位置情報及び形状情報を含み、前記船舶情報上の前記各船舶10の識別情報及び前記予測位置情報を含む。
【0071】
なお、前記統合情報は、前記衛星情報と前記船舶情報との間の誤差情報を含んでいるが、前記誤差情報は、前記星情報上の各船舶の位置及び形状に関する情報と、前記船舶情報上の各船舶の予測位置情報及び識別情報を相互に比較した差を示すものである。
【0072】
つまり、前記統合情報は、前記衛星情報及び前記船舶情報が含まれ、なお、前記誤差情報まで含むようになる(S150)。
【符号の説明】
【0073】
110 レーダ衛星
120 船舶自動識別装置
130 情報統合システム
140 情報統合プログラム
【特許請求の範囲】
【請求項1】
レーダ衛星から船舶に対する衛星情報が送信され、各船舶に搭載された船舶自動識別装置(Automatic Identification System、AIS)から前記各船舶の船舶情報が送信される第1段階と、
前記各船舶に対する現在の衛星情報の取得時間を抽出した後、前記取得時間と同じ時間での前記各船舶の予測位置情報を算出し、前記船舶情報上の各船舶の位置を前記予測位置情報に補正する第2段階と、
前記予測位置情報を含む前記船舶情報及び前記衛星情報が統合された統合情報を生成する第3段階と、を含むことを特徴とする船舶の統合監視のための衛星情報及び船舶情報の統合方法。
【請求項2】
前記衛星情報は、前記船舶の位置についての情報を含み、前記船舶情報は、前記各船舶を識別できる船名、船舶の大きさ及び船舶の種類についての情報である識別情報を含み、
前記第2段階及び前記第3段階の間に、
前記それぞれの予測位置情報と前記衛星情報とを比較して、前記衛星情報上の各舶船と前記船舶情報上のそれぞれの識別情報とを相互にマッチする第2−1段階をさらに含むことを特徴とする請求項1に記載の船舶の統合監視のための衛星情報及び船舶情報の統合方法。
【請求項3】
前記レーダ衛星は、前記衛星情報を一定の周期で送信し、前記船舶自動識別装置は、船舶の速度に応じて変動される周期で前記船舶情報を送信し、
前記第1段階及び前記の第2段階の間に、
前記衛星情報の送信周期と前記船舶情報の送信周期との間の差を計算し、前記予測位置情報の算出時に前記取得時間の以前又は以前及び以後の船舶情報のうち、どの時点での情報を抽出するかを判断する第1−1段階をさらに含むことを特徴とする請求項2に記載の船舶の統合監視のための衛星情報及び船舶情報の統合方法。
【請求項4】
前記第2段階は、
前記衛星情報の取得時間よりも以前の時間に取得された船舶情報から前記船舶が航海した針路及び速度情報を抽出し、前記船舶が前記取得時間と同じ時間に位置すると推定される位置を前記予測位置情報に算出することを特徴とする請求項3に記載の船舶の統合監視のための衛星情報及び船舶情報の統合方法。
【請求項5】
前記第2段階は、DR(dead reckoning)アルゴリズムを用いて前記予測位置情報を算出し、
前記DRアルゴリズムは、前記船舶情報上で前記船舶の位置である基準位置情報と、前記基準位置情報上で前記船舶の針路及び速度情報を抽出し、前記の取得時間上で、前記の船舶の位置である、前記の予測位置情報を計算することを特徴とする請求項4に記載の船舶の統合監視のための衛星情報及び船舶情報の統合方法。
【請求項6】
前記第2段階は、
前記衛星情報の取得時間の以前及び以後に取得された船舶情報から前記船舶が移動した位置を抽出し、前記船舶が、前記取得時間と同じ時間に位置すると推定される位置を前記予測位置情報に算出することを特徴とする請求項3に記載の船舶の統合監視のための衛星情報及び船舶情報の統合方法。
【請求項7】
前記衛星情報は、前記レーダ衛星から前記船舶を撮影した映像から抽出され、前記各船舶の大きさ及び形状についての情報である形状情報をさらに含み、
前記第2−1段階は、
前記各船舶の形状情報と前記船舶情報上の各識別情報を相互に比較して、前記衛星情報上の各船舶と前記識別情報を相互にマッチする第2−1−1段階をさらに含むことを特徴とする請求項2又は請求項6のうちいずれか1項に記載の船舶の統合監視のための衛星情報及び船舶情報の統合方法。
【請求項8】
前記統合情報は、前記衛星情報と前記船舶情報との誤差についての情報である誤差情報を含むことを特徴とする請求項7に記載の船舶の統合監視のための衛星情報及び船舶情報の統合方法。
【請求項9】
前記レーダ衛星は、合成開口レーダ(Synthetic Aperture Radar、SAR)を搭載した衛星を備えることを特徴とする請求項8に記載の船舶の統合監視のための衛星情報及び船舶情報の統合方法。
【請求項1】
レーダ衛星から船舶に対する衛星情報が送信され、各船舶に搭載された船舶自動識別装置(Automatic Identification System、AIS)から前記各船舶の船舶情報が送信される第1段階と、
前記各船舶に対する現在の衛星情報の取得時間を抽出した後、前記取得時間と同じ時間での前記各船舶の予測位置情報を算出し、前記船舶情報上の各船舶の位置を前記予測位置情報に補正する第2段階と、
前記予測位置情報を含む前記船舶情報及び前記衛星情報が統合された統合情報を生成する第3段階と、を含むことを特徴とする船舶の統合監視のための衛星情報及び船舶情報の統合方法。
【請求項2】
前記衛星情報は、前記船舶の位置についての情報を含み、前記船舶情報は、前記各船舶を識別できる船名、船舶の大きさ及び船舶の種類についての情報である識別情報を含み、
前記第2段階及び前記第3段階の間に、
前記それぞれの予測位置情報と前記衛星情報とを比較して、前記衛星情報上の各舶船と前記船舶情報上のそれぞれの識別情報とを相互にマッチする第2−1段階をさらに含むことを特徴とする請求項1に記載の船舶の統合監視のための衛星情報及び船舶情報の統合方法。
【請求項3】
前記レーダ衛星は、前記衛星情報を一定の周期で送信し、前記船舶自動識別装置は、船舶の速度に応じて変動される周期で前記船舶情報を送信し、
前記第1段階及び前記の第2段階の間に、
前記衛星情報の送信周期と前記船舶情報の送信周期との間の差を計算し、前記予測位置情報の算出時に前記取得時間の以前又は以前及び以後の船舶情報のうち、どの時点での情報を抽出するかを判断する第1−1段階をさらに含むことを特徴とする請求項2に記載の船舶の統合監視のための衛星情報及び船舶情報の統合方法。
【請求項4】
前記第2段階は、
前記衛星情報の取得時間よりも以前の時間に取得された船舶情報から前記船舶が航海した針路及び速度情報を抽出し、前記船舶が前記取得時間と同じ時間に位置すると推定される位置を前記予測位置情報に算出することを特徴とする請求項3に記載の船舶の統合監視のための衛星情報及び船舶情報の統合方法。
【請求項5】
前記第2段階は、DR(dead reckoning)アルゴリズムを用いて前記予測位置情報を算出し、
前記DRアルゴリズムは、前記船舶情報上で前記船舶の位置である基準位置情報と、前記基準位置情報上で前記船舶の針路及び速度情報を抽出し、前記の取得時間上で、前記の船舶の位置である、前記の予測位置情報を計算することを特徴とする請求項4に記載の船舶の統合監視のための衛星情報及び船舶情報の統合方法。
【請求項6】
前記第2段階は、
前記衛星情報の取得時間の以前及び以後に取得された船舶情報から前記船舶が移動した位置を抽出し、前記船舶が、前記取得時間と同じ時間に位置すると推定される位置を前記予測位置情報に算出することを特徴とする請求項3に記載の船舶の統合監視のための衛星情報及び船舶情報の統合方法。
【請求項7】
前記衛星情報は、前記レーダ衛星から前記船舶を撮影した映像から抽出され、前記各船舶の大きさ及び形状についての情報である形状情報をさらに含み、
前記第2−1段階は、
前記各船舶の形状情報と前記船舶情報上の各識別情報を相互に比較して、前記衛星情報上の各船舶と前記識別情報を相互にマッチする第2−1−1段階をさらに含むことを特徴とする請求項2又は請求項6のうちいずれか1項に記載の船舶の統合監視のための衛星情報及び船舶情報の統合方法。
【請求項8】
前記統合情報は、前記衛星情報と前記船舶情報との誤差についての情報である誤差情報を含むことを特徴とする請求項7に記載の船舶の統合監視のための衛星情報及び船舶情報の統合方法。
【請求項9】
前記レーダ衛星は、合成開口レーダ(Synthetic Aperture Radar、SAR)を搭載した衛星を備えることを特徴とする請求項8に記載の船舶の統合監視のための衛星情報及び船舶情報の統合方法。
【図1】


【図2】
【図2】
【公開番号】特開2013−83623(P2013−83623A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2012−47274(P2012−47274)
【出願日】平成24年3月2日(2012.3.2)
【出願人】(511075302)コリア オーシャン リサーチ アンド ディベロップメント インスティチュート (2)
【Fターム(参考)】
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願日】平成24年3月2日(2012.3.2)
【出願人】(511075302)コリア オーシャン リサーチ アンド ディベロップメント インスティチュート (2)
【Fターム(参考)】
[ Back to top ]