
船舶の自動操舵装置および自動操舵プログラム
【課題】操船者が容易に船舶の航路を設定することができ、かつ、船舶が設定航路上を航行するよう確実に制御できる船舶の自動操舵装置および自動操舵プログラムを提供する。
【解決手段】操船者が自動操舵装置の表示部により、自動操舵に切り替えると、その時点における船舶の船首方位α1および船舶の位置β1を自動操舵装置の制御部が取込み、設定航路δおよび設定方位γを算出するS1,S2。以後は、各時点における船舶の船首方位α2と船舶の位置β2を随時取込みS3,S7、設定航路δと設定方位γとの方位偏差ε3を計算しS10、これに基づき舵を制御するための命令舵角ωを算出するS11。
【解決手段】操船者が自動操舵装置の表示部により、自動操舵に切り替えると、その時点における船舶の船首方位α1および船舶の位置β1を自動操舵装置の制御部が取込み、設定航路δおよび設定方位γを算出するS1,S2。以後は、各時点における船舶の船首方位α2と船舶の位置β2を随時取込みS3,S7、設定航路δと設定方位γとの方位偏差ε3を計算しS10、これに基づき舵を制御するための命令舵角ωを算出するS11。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、船舶の操舵の自動制御にかかるものであり、船舶を設定した航路にナビゲートする船舶の自動操舵装置および自動操舵プログラムに関する。
【背景技術】
【0002】
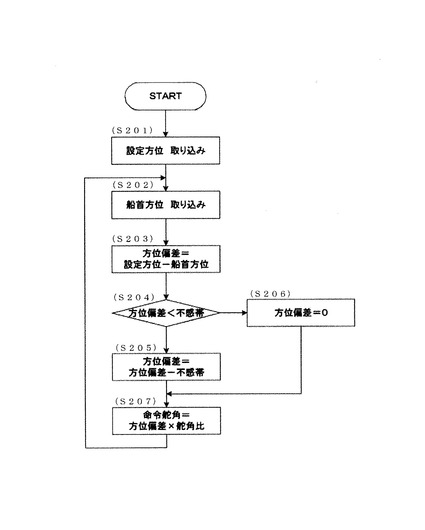
従来、船舶の操作を自動制御するための装置として、船舶の目標方位を設定し、その目標方位と船舶の船首方位との方位のずれが生じていた場合に、船舶の船首方位を目標方位に修正するよう船舶の舵を自動制御するための自動操舵装置および自動操舵プログラムが一般的であった(図8参照)。
【0003】
また上記以外にも、GPSナビゲーションを利用した自動操舵装置であって、GPS受信機より取得した自船位置、移動方向、移動速度を自動航路保持を行なうためのセンサーデータとして用い、目的の位置を入力することで、自船の位置から目的の位置までの航路を予測し、自船位置等のデータから舵取装置に直接指令舵角信号を出力することにより、自動的に船舶の航路を保持する装置が提案されている(例えば特許文献1参照)。また、この装置によれば、目的の位置を入力する手段として、目的の緯度および経度を入力する以外にも、電子海図表示画面にタッチパネルを装備し、電子海図上の任意の点をタッチ用のペンでタッチすることで航路を設定できるようにすることも可能である。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−90171
【発明の概要】
【発明が解決しようとする課題】
【0005】
1)しかしながら、上記した従来の一般的な自動操舵装置および自動操舵プログラムには、以下の点で改良すべき余地がある。
【0006】
目標方位と船首方位のみによる自動制御の場合、船舶の船首方位と目標方位とが同方位であったときは、船舶の船首方位の修正は行われないこととなる。つまり、潮流や風の影響により船舶の船首方位が目標方位と平行な状態で航路からずれた場合には、船舶の船首方位は修正されないまま航行することとなるため、目標の航路から外れていることに操船者が気付かず、そのまま航行してしまうおそれがある。
【0007】
2)また、上記特許文献1の船舶の自動航路保持装置には、以下の点で改良すべき余地がある。
【0008】
GPSを利用したナビゲーションシステムでは、目的位置の緯度および経度を入力しなければならないため、目的位置の入力が猥雑で時間がかかる。特に揺れの大きな小型船舶の船上において頻繁に目的位置を変更する必要がある場合などは、非常に操作がしづらい。
【0009】
3)また、特許文献1の発明によると、目的位置の入力を画面表示上の任意の点をタッチペンでタッチすることで容易に目的位置の入力ができると記載されているが、この方法においても揺れの大きな小型船舶の船上においては目的位置の入力が困難である。くわえてこのような状態でのタッチペンによる目的位置の入力では、誤った位置を入力する可能性が高い。さらに、タッチペンによる入力には電子海図データベースや画面表示にタッチパネルが必須であるため、コストがかかる。
【0010】
本発明は上述の点に鑑みてなされたもので、自動操舵装置に設けられた切替手段(例えば、スイッチやボタンなど)によって、自動操舵に切り替えるという極めて簡単で確実な操作のみで、自動的に航路が設定され、以後その設定航路に基づき、船舶が設定航路上からずれた場合に、自動的に設定航路上に船舶を航行させるよう制御する自動操舵装置を提供しようとするものである。
【課題を解決するための手段】
【0011】
上述の課題を解決するために本発明に係る自動操舵装置は、設定した航路上に船舶を保持するための制御手段を備え、手動操舵と自動操舵を切替可能な自動操舵装置であって、前記船舶の船首方位を検出する方位検出手段を備え、前記船舶の位置を検出する位置検出手段を備え、前記自動操舵に切り替えた時点における、前記方位検出手段により検出された船舶の当初船首方位と、前記位置検出手段により検出された船舶の当初位置とから、設定方位および設定航路を算出するための航路算出手段と、前記航路算出手段の算出結果により得られた前記設定方位および前記設定航路と、船舶の船首方位と、船舶の位置とから、船舶に設定航路上を航行させるため舵の動作を自動的に制御する自動制御手段とを備え、前記自動操舵装置に設けられた切替手段により、自動操舵に切り替えるだけで、前記設定航路の算出および前記自動制御ができることを特徴とする。
【0012】
上記の本発明に係る自動操舵装置によれば、操船者は自動操舵装置の切替手段によって自動操舵に切り替えるだけで、その時点における船首方位から設定航路が自動的に設定される。したがって、操船者は猥雑な目的地の入力等の操作が一切不要であり、例えばスイッチを入れるとか、ボタンを押すといった非常に簡単・確実な操作のみで、航路の設定ができる。また、航路を設定した後は、自船の船首方位と自船の位置とに基づき、船舶が設定航路上を航行するよう自動的に制御されるため、操船者の負担がかからない。さらに容易に手動操舵と自動操舵とを切り替えることが可能であるため、船舶の航路を変更する場合には、一旦手動操舵に切り替え、目標の船首方位になるよう船舶を手動操舵した後、再度切替手段により自動操舵に切り替えるだけで、簡単に設定航路を変更することができる。また本発明の自動操舵装置においては、GPSを利用した特別なナビゲーションシステム等が不要であるため、比較的安価に自動操舵装置を導入することができる。
【0013】
請求項2に記載のように、前記自動制御手段が、前記設定航路が設定された後、船舶の船首方位を取り込み、前記設定方位と前記船首方位との差に基づいて第一の方位偏差を算出する手段と、前記第一の方位偏差が所定の閾値未満である場合には、第二の方位偏差を0とし、前記第一の方位偏差が所定の閾値以上である場合には、前記第一の方位偏差から前記閾値を差し引いた値を第二の方位偏差とする手段と、前記船舶の位置を取り込み、船舶の位置と前記設定航路とのずれ量を算出し、前記ずれ量に所定の定数を乗することにより方位補正量を算出する手段と、前記第二の方位偏差と前記方位補正量との和から、第三の方位偏差を算出する手段とを備え、前記第三の方位偏差に基づき、前記設定航路上に船舶を修正移動させるよう前記舵を制御することを特徴とする。
【0014】
このようにすれば、前記背景技術の1)に記載の船首方位のみによる自動操舵装置と比較し、船舶の位置と船首方位とによって制御されるため、確実に船舶を設定航路上に航行させることができる。また、仮に前記第一の方位偏差に閾値を設定しないとすると、方位偏差が微少な場合にも船舶を設定航路上に制御するよう自動操舵装置や舵等を動作させることとなるため、潮流や風の影響を常に受ける海上においては、自動操舵装置や舵等を常に動作させることとなってしまい、自動操舵装置及び舵等に余分な負荷をかけることとなる。したがって請求項2に記載のように所定の閾値を設定することで、微少な方位偏差によっては、自動操舵装置及び舵等を頻繁に動作させることのないよう設定でき、自動操舵装置及び舵等の寿命の向上を図ることができる。
【0015】
請求項3に記載のように、前記ずれ量が、前記船舶の位置と前記設定航路との最短距離であることを特徴とする。
【0016】
このようにすれば、前記ずれ量を一定の基準に基づき算出することができる。
【0017】
請求項4に記載のように、前記位置検出手段からの情報が途絶えた場合には、前記船首方位と前記設定方位とにより、前記舵を自動的に制御することを特徴とする。
【0018】
このようにすれば、何らかの不具合によって位置検出手段からの船舶の位置が得られない場合にも、自動操舵装置が停止することなく、船首方位によって船舶を設定航路上に沿うようナビゲートすることができるため、設定航路上から大きくはずれることがない。
【0019】
請求項5に記載のように、前記設定航路の方位を修正するための入力手段を備えたことを特徴とする。
【0020】
このようにすれば、一旦設定した設定航路が操船者の望む航路でなかった場合、操船者は設定航路を簡単に修正することができる。
【0021】
請求項6に記載のように、前記位置検出手段が着脱可能なGPSコンパスまたは航法装置であることを特徴とする。
【0022】
このようにすれば、比較的安価なGPSコンパスを用いることで船舶の位置を得ることができる。また航法装置は船舶に既設の場合も多いため、新たに位置検出手段を揃える必要がなく、所有の航法装置を本発明の自動操舵装置に接続するだけで、船舶の位置情報を取得することができる。以上、操船者は位置検出手段として、GPSコンパスや航法装置を自動操舵装置に選択的に接続することができる。
【0023】
請求項7に記載のように、前記方位検出手段が接続可能なピックオフセンサーまたはGPSコンパスであることを特徴とする。
【0024】
このようにすれば、比較的安価なピックオフセンサーまたはGPSコンパスを用いて船舶の船首方位情報を得ることができ、操船者は方位検出手段として、これらを選択的に自動操舵装置に接続することができる。
【0025】
請求項8に記載のように、手動操舵と自動操舵を切替可能な船舶の自動操舵装置に、設定した航路上に船舶を保持する制御をさせるためのプログラムであって、前記自動操舵に切り替えた時点において、前記船舶の船首方位を検出する方位検出手段により検出された船舶の当初船首方位と、前記船舶の位置を検出する位置検出手段により検出された船舶の当初位置とから、設定方位および設定航路を算出した後、船舶の船首方位を取り込み、前記設定方位と前記船首方位との差に基づいて第一の方位偏差を算出し、前記第一の方位偏差が所定の閾値未満である場合には、第二の方位偏差を0とし、前記第一の方位偏差が所定の閾値以上である場合には、前記第一の方位偏差から前記閾値を差し引いた値を第二の方位偏差を算出し、船舶の位置を取り込み、船舶の位置と前記設定航路とのずれ量を算出し、前記ずれ量に所定の定数を乗することにより方位補正量を算出し、前記第二の方位偏差と前記方位補正量との和から、第三の方位偏差を算出し、前記第三の方位偏差に基づいて前記自動操舵装置が、前記設定航路上に船舶を保持するために前記舵を動作させる制御をすることを特徴とする。
【0026】
このようにすれば、操船者は自動操舵装置の切替手段によって自動操舵に切り替えるだけで、その時点における船首方位から設定航路が自動的に設定される。また、航路を設定した後は、自船の船首方位と自船の位置とに基づき、船舶が設定航路上を航行するよう自動的に制御されるため、操船者の負担がかからない。さらに、前記背景技術の1)に記載の船首方位のみによる自動操舵装置と比較し、船舶の位置と船首方位とによって制御されるため、確実に船舶を設定航路上に航行させることができる。
【0027】
請求項9に記載のように、前記ずれ量が、前記船舶の位置と前記設定航路との最短距離を算出することを特徴とする。
【0028】
このようにすれば、前記ずれ量を一定の基準に基づき算出することができる。
【0029】
請求項10に記載のように、前記位置検出手段からの情報が途絶えた場合には、前記船首方位と前記設定方位とにより、前記舵を自動的に制御することを特徴とする。
【0030】
このようにすれば、何らかの不具合によって位置検出手段からの船舶の位置が得られない場合にも、自動操舵装置が停止することなく、船首方位によって船舶を設定航路上に沿うようナビゲートすることができるため、設定航路上から大きくはずれることがない。
【0031】
請求項11に記載のように、前記設定方位および設定航路を修正するための手段によって、修正された修正設定方位および修正設定航路が設定された後において、船舶の船首方位を取り込み、前記修正設定方位と前記船首方位との差に基づいて第一の方位偏差を算出し、前記第一の方位偏差が所定の閾値未満である場合には、第二の方位偏差を0とし、前記第一の方位偏差が所定の閾値以上である場合には、前記第一の方位偏差から前記閾値を差し引いた値を第二の方位偏差を算出し、船舶の位置を取り込み、船舶の位置と前記修正設定航路とのずれ量を算出し、前記ずれ量に所定の定数を乗することにより方位補正量を算出し、前記第二の方位偏差と前記方位補正量との和から、第三の方位偏差を算出し、前記第三の方位偏差に基づいて前記自動操舵装置が、前記修正設定航路上に船舶を保持するために前記舵を動作させる制御をすることを特徴とする。
【0032】
このようにすれば、一旦設定した設定航路が操船者の望む航路でなかった場合、操船者は設定航路を簡単に修正することができる。
【発明の効果】
【0033】
本発明に係る自動操舵装置は上記の構成からなるため、次のような優れた効果がある。
【0034】
自動操舵装置の切替手段により自動操舵(モード)に入れるだけで、その時点における船首方位から設定航路(コース)が自動的に設定され、以後、船首方位と船舶の位置に基づき、設定航路上を航行するよう自動的に制御できる。このため、従来の船首方位のみに基づいた自動操舵装置に比し、より正確に、設定航路上に船舶を航行させることができる。
【0035】
また、GPSナビゲーションシステムを用いた自動操舵装置に比べ、安価に自動制御が可能であり、かつ、目的地の設定も不要であり容易に設定航路を設定することが可能である。
【図面の簡単な説明】
【0036】
【図1】本発明にかかる自動操舵装置およびこれに接続可能な機器を示したシステム図である。
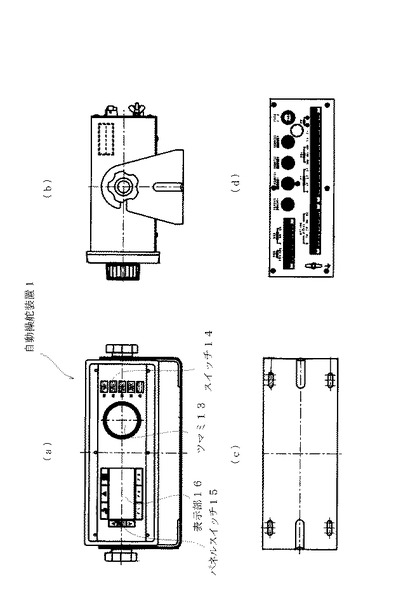
【図2】(a)は、本発明にかかる自動操舵装置の正面図である。(b)は、同右側面図である。(c)は、同平面図である。(d)は、同背面図である。
【図3】本発明にかかる自動操舵装置における制御の全体を示すフローチャートである。
【図4】図3のフローチャート中、ずれ量の算出方法に関するフローチャートのうち、船舶Aが第0象限に位置する場合のものである。
【図5】(a)は、船舶Aが第0象限(グラフ中左上)に位置した場合の、自動操舵装置における制御を説明するための図である。(b)は船舶Aが第1象限(グラフ左下)に位置した場合の、同説明図である。
【図6】(a)は、船舶Aが第2象限(グラフ中左下)に位置した場合の、自動操舵装置における制御を説明するための図である。(b)は船舶Aが第3象限(グラフ右上)に位置した場合の、同説明図である。
【図7】本発明にかかる自動操舵装置の構成の概略を示すブロック図である。
【図8】従来の自動操舵装置における制御のフローチャートである。
【発明を実施するための形態】
【0037】
以下、本発明に係る船舶の自動操舵装置および自動操舵プログラムについての実施形態を図面に基づいて説明する。
【0038】
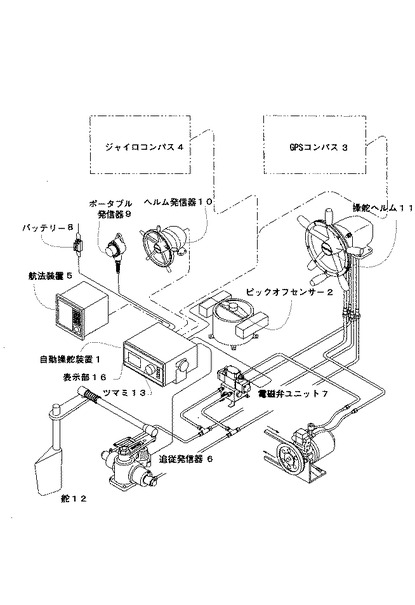
本発明の自動操舵装置1は、図1及び図2に示すように自動操舵装置1に、船舶Aの船首方位を検出するためのピックオフセンサー2またはジャイロコンパス4、船舶Aの位置および船首方位を検出するためのGPSコンパス3または航法装置5、舵の転舵角度を電気信号へ変換するための追従発信器6、自動操舵装置1の制御部からの電気信号により舵12を動作させるための電磁弁ユニット7、バッテリー8、ポータブル発信器9、ヘルム発信器10を取り付けることができる。これら機器との接続は、自動操舵装置1の背面に設けられた端子に各機器のコードをつなげる形で接続する。
【0039】
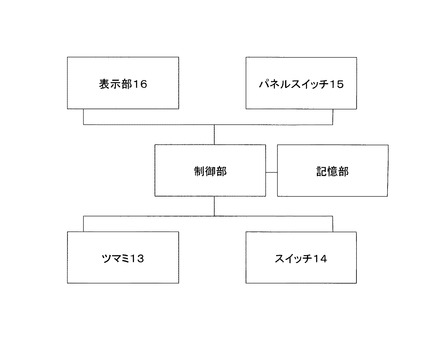
また本発明の自動操舵装置1は、図7に示すように、各機器から取得した数値等から必要な情報を算出し各機器を制御するための制御部と、制御部により算出した数値等を保存するための記憶部と、表示部16およびツマミ13、スイッチ14、パネルスイッチ15とを備える。
【0040】
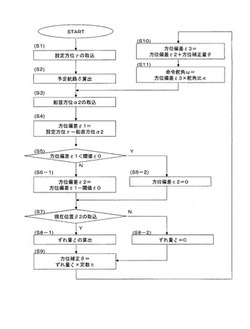
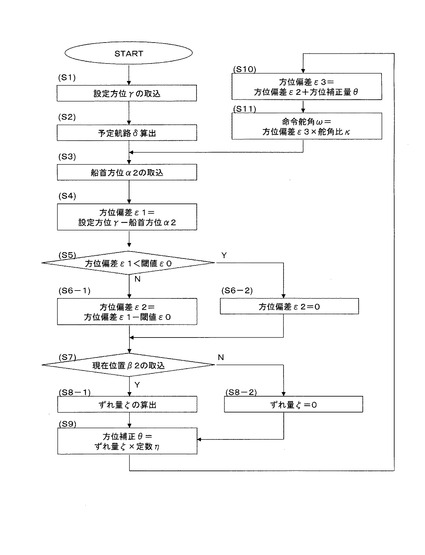
以下、本実施形態においては、自動操舵装置1にピックオフセンサー2、GPSコンパス3、追従発信器6、電磁弁ユニット7、バッテリー8、ポータブル発信器9、ヘルム発信器10を接続した状態における自動操舵装置1の制御について図3のフローチャートに基づき説明する。
(制御フロー)
まず、操船者が自動操舵装置1のスイッチ14により自動操舵モードに切り替えると、それと同時に、ピックオフセンサー2が船舶Aの船首方位α1を検出し、その船首方位α1を電気信号により自動操舵装置1の制御部に伝達する。
【0041】
これを受信した自動操舵装置1の制御部は船首方位α1を設定方位γとして、自動操舵装置1の記憶部に保存する(ステップS1)。
【0042】
なお、スイッチ14による操作以外にも、自動操舵装置1のリモコン機能をもつポータブル発信器9で自動操舵モードに合わせることでも、同様の操作が可能である。
【0043】
この船首方位α1を設定方位γとして設定した自動操舵装置1の制御部は、次にGPSコンパス3が検出した船舶Aの位置β1を電気信号により取得し、位置β1を基点として、該基点から設定方位γの方向に直線状の設定航路δを設定し、自動操舵装置1の記憶部に保存する(ステップS2)。
【0044】
上記設定航路δが設定された後においては、船舶Aが設定航路δ上を航行するよう、随時、各時点における船舶Aの船首方位α2と位置β2とをピックオフセンサー2およびGPSコンパス3から電気信号により自動操舵装置1の制御部が取得し、船首方位α2と位置β2と、記憶部に保存された設定航路δおよび設定方位γとに基づいて、自動操舵装置1の制御部が命令舵角ωを算出し、自動操舵装置1の制御部が命令舵角ωを電気信号により電磁弁ユニット7に伝達し、電磁弁ユニット7が舵12を動作させる。舵12が動作すると、追従発信器6が舵12の舵角を検知し、この舵角を電気信号により自動操舵装置1の制御部に伝達する。
【0045】
具体的には、設定航路δが設定された後において、ピックオフセンサー2により検出された船首方位α2を自動操舵装置1の制御部が取得する(ステップS3)。
【0046】
そして、設定方位γと、船首方位α2との差を方位偏差(第一の方位偏差)ε1として算出する(ステップS4)。
【0047】
次に、方位偏差ε1を、あらかじめ操船者が設定した閾値ε0と比較し(ステップS5)、
ε1<ε0の場合には、方位偏差(第二の方位偏差)ε2=0とし(ステップS6−2)、
ε1≧ε0の場合には、方位偏差(第二の方位偏差)ε2=ε1−ε0と算出する(ステップS6−1)。
【0048】
この閾値ε0を定めている理由は次のとおりである。船舶は海上を航行するため潮流や風の影響を受け、常に船首方位が微少ながら変動するのが通常である。このため、閾値を設定していない場合、微少な船首方位の変化によっても自動操舵装置が動作することとなり、常に自動操舵装置1が動作している状態となってしまう。そうすると、自動操舵装置1や舵12等の機器が常時動作することとなり、それらに過度の負担がかかることとなる。したがって、微少な方位偏差については自動操舵装置1等が動作することのないよう制御するため、閾値ε0を設定するのである。なお、閾値ε0は、船舶の性能や大きさ等に応じて設定する。
【0049】
以上、ステップS3〜S6の工程によって、設定方位γと船首方位α2とによる方位偏差ε2が算出できる。
【0050】
続いて、位置情報である船舶Aの位置β2と設定航路δとによって、船舶Aの設定航路δ上からのずれ量を算出し、船舶Aを設定航路δ上に修正させるステップについて説明する。
【0051】
まず、GPSコンパス3により検出された船舶Aの位置β2を自動操舵装置1の制御部が取得する(ステップS7)。
【0052】
そして、設定航路δと船舶Aの位置β2とのずれ量ζを算出する(ステップS8−1)。なお、ずれ量ζの算出については、下記(ずれ量の算出方法)において詳細を記述する。
【0053】
また、この時、GPSコンパス3の不具合等によって、自動操舵装置1の制御部が船舶Aの位置を取得できない場合は、ずれ量ζ=0として算出する(ステップS8−2)。
【0054】
このステップS8−1もしくはステップS8−2によって算出されたずれ量ζに、あらかじめ設定した定数ηを乗することにより(数式1)、方位補正量θを算出する(ステップS9)。
【0055】
(数式1) θ=ζ×η
【0056】
なお、所定の定数ηの値とは、距離(長さ)のファクターであるずれ量ζを、方位(角度)のファクターに変換するための定数であり、船舶の大きさや性能によって設定する。
【0057】
以上ステップS7〜S9の工程によって、設定航路δと船舶の位置のずれによる方位補正量θが算出できる。
【0058】
次に、この位置のずれによる方位補正量θと、方位のずれによる方位偏差ε2とに基づいて、自動操舵装置1の制御部が最終的に船舶Aの舵12を制御するための命令舵角ωを算出する。以下、命令舵角ωを算出する工程について説明する。
【0059】
まず、方位偏差ε2と方位補正量θとを用い、下記の数式2により方位偏差(第三の方位偏差)ε3を算出する(ステップS10)。
【0060】
(数式2) ε3=ε2+θ
【0061】
そして、方位偏差ε3に任意の定数である舵角比κを乗することにより、命令舵角ωを算出する(ステップS11)。
【0062】
なお、舵角比κについては、船舶Aの進行方向を補正するための方位を、舵12を動作させる舵角に変換するための定数であり、任意の定数ηと同様、船舶の大きさや性能により操船者が任意に設定する。
【0063】
以上の工程により得られた命令舵角ωを、自動操舵装置1の制御部から電磁弁ユニット7に電気信号として伝達し、電磁弁ユニット7が舵12を動作させ、船舶Aを設定航路δ上に航行させるよう制御される。なお、ステップS1およびS2によって設定方位γと設定航路δが算出された後は、上記ステップS3〜S11の制御が繰り返し行われることによって、船舶Aが設定航路δ上を航行できることとなる。
【0064】
また、ステップS1およびS2において設定された設定方位γおよび設定航路δは、自動操舵装置1に設けられたツマミ13を回すことで、随時変更・調整することができる。このツマミ13の操作によって設定方位γおよび設定航路δが変更された後は、変更後の設定方位γ’および設定航路δ’が自動操舵装置1の記憶部に上書き保存され、上記ステップS3〜S11の制御ループが変更後の設定方位γ’および設定航路δ’に基づいて行われる。
【0065】
その他、設定方位γおよび設定航路δを変更させる方法として、操船者がスイッチ12またはポータブル発信器9を操作し、一旦自動操舵モードから手動モードに変更し、操船者の望む方位に船舶Aを操舵した後、再度スイッチ12またはポータブル発信器9で自動操舵モードに切り替えることで、設定方位γおよび設定航路δの変更を行うことができる。
【0066】
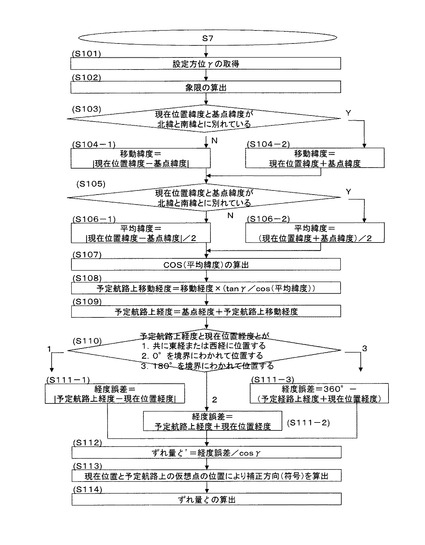
次に、上記ステップS8−1におけるずれ量ζを算出する工程について、図4〜図6に基づき詳細を説明する。
【0067】
(ずれ量ζの算出方法)
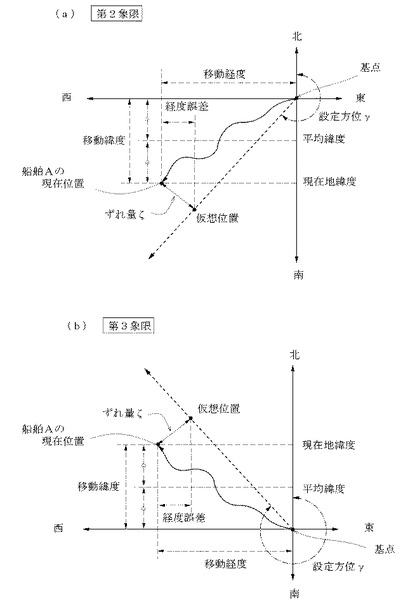
ここで、本発明におけるずれ量ζとは、船舶Aの位置と設定航路δとの最短距離、つまり船舶Aの位置から設定航路δ上におろした垂線の長さをずれ量ζの値とする。本実施形態においては、船舶Aの位置から設定航路δ線上に下ろした垂線と設定航路δとの交点を仮想位置として、船舶Aの位置の経度と仮想位置の経度との経度差μを求めることにより、ずれ量ζの値を算出することとする。以下にその工程を説明する。
【0068】
はじめに、自動操舵モードが選択された時点の船舶Aの位置を基点(X=0、Y=0)とし、東西方向にX軸(経度)、南北方向にY軸(緯度)とする球面を考え、(X=+、Y=+)の領域を第0象限、(X=+、Y=−)の領域を第1象限、(X=−、Y=−)の領域を第2象限、(X=−、Y=+)の領域を第3象限とする。なお図5及び図6のグラフは、この球面を開いて平面化したグラフである。また、設定航路δがいずれの象限に位置するかにより、ずれ量ζの算出方法が異なるため、各象限にわけて説明する。
【0069】
設定航路δがいずれの象限に位置するかを算出する手順は、まず基点を中心にY軸(+側(北側))から時計回りに設定航路δまでの角度、つまり設定方位γを、自動操舵装置1の制御部が取得する(ステップS101)
次に、制御部はこの設定方位γを90°で割り、その値の整数部分をその象限とする(ステップS102)。
【0070】
象限=γ÷90°の整数部
1.第0象限に船舶Aが位置する場合(0≦γ<90°)
(1)上記ステップS102の式により船舶Aが第0象限に位置する場合、以下の式によって、船舶Aの基点から現在位置までの移動緯度を算出する。なお、移動緯度を算出する過程において、基点と現在位置との位置関係によって算出に用いる式が異なるため、i)現在位置の緯度と基点緯度が北半球または南半球で同一半球上に位置する場合と、ii)異なる半球上に位置する場合とにわける(ステップS103)。
【0071】
ステップS103により振り分けられた後、以下の式によって移動緯度をそれぞれ算出する。
i) 移動緯度=|現在位置緯度−基点緯度|(ステップS104−1)
ii)移動緯度=現在位置緯度+基点緯度(ステップS104−2)
【0072】
(2−1)次に、経度差μを求めるための準備として、基点緯度と現在位置緯度との平均緯度を算出する。この場合も、i)基点と現在位置が共に北半球または南半球にある場合と、ii)異なる場合とにわける(ステップS105)
そして、ステップS105により振り分けられた後、以下の式によって平均緯度をそれぞれ算出する。
i) 平均緯度=(現在位置緯度+基点緯度)/2(ステップS106−1)
ii)平均緯度=|現在位置緯度−基点緯度|/2 (ステップS106−2)
【0073】
(2−2)平均緯度が算出された後、COS(平均緯度)を算出する(ステップS107)。
【0074】
これは、最終的にずれ量ζの値として距離(長さ)を求める必要があるが、上記のXY平面上においては経度と緯度により船舶Aの位置を特定している。そうすると、実際の地球は球形であるため、たとえ同じ経度差であっても緯度が異なることで、実際の距離(長さ)の値は大きく異なることとなる。例えば北極圏付近での経度10°の差異による距離と、赤道付近での経度10°の差異による距離とでは、大きく異なる値となる。
【0075】
そこで、ずれ量ζを求めるにあたり、緯度によって異なる経度差を距離(長さ)に補正するために、このCOS(平均緯度)を利用する。なお、COS(平均緯度)は以下の式で求める。
【0076】
COS(平均緯度)=COS(deg)×(COS(min)×COS(sec)−SIN(min)×SIN(sec))−SIN(deg)(SIN(min)×COS(sec)+COS(min)×SIN(sec))
deg:平均緯度の度成分
min:平均緯度の分成分
sec:平均緯度の秒成分
【0077】
(3)次に、設定航路δ上の仮想点における経度を、以下の式により計算する。
基点から仮想点までの仮想移動経度=現在位置移動緯度×(tanγ/COS(平均緯度))(ステップS108)
仮想点経度=基点経度+基点から仮想点までの仮想移動経度 (ステップS109)
【0078】
(4)上記式より、設定航路上の仮想点経度が求められたので、現在位置経度との差をとる。この際、仮想点と現在位置との位置関係により、これらの経度誤差の算出式が異なるため、次のように場合わけする。i)仮想点経度と現在位置経度とが共に東経又は西経に位置する場合、ii)0度を境界に東経と西経にわかれる場合、iii)180度を境界に東経と西経にわかれる場合にわける(ステップS110)。
【0079】
ステップS110により振り分けられた後、以下の式により、経度誤差を算出する。
i) 経度誤差=|仮想点経度−現在位置経度| (ステップS111−1)
ii) 経度誤差=|仮想点経度+現在位置経度| (ステップS111−2)
iii)経度誤差=|360°−(仮想点経度+現在位置経度)| (ステップS111−3)
【0080】
(5)続いて、上記4)で求めた経度誤差に1/COSγを乗することで、ずれ量ζのスカラー量であるずれ量ζ’を算出する(ステップS112)。
ずれ量ζ’=|経度誤差×1/COSγ|
【0081】
(6)以上の工程により算出されたずれ量ζ’は、上記ステップS112の式にある通り、必ず正の値を取るずれ量ζのスカラー量であるため、ずれ量ζを求めるためにはいずれの方位に補正するかを決定し、符号を算出する必要がある。そこで、いずれの方向に方位補正するかを、以下の条件に基づいて算出する(ステップS113)。
【0082】
i)現在位置が設定航路上の仮想点より東(または南)に位置する場合
船首方位が設定方位γ+−90°以内の時 → 左舵に補正
船首方位が設定方位γ+−90°より大の時 → 右舵に補正
ii)現在位置が設定航路上の仮想点より西(または北)に位置する場合
船首方位が設定方位γ+−90°以内の時 → 右舵に補正
船首方位が設定方位γ+−90°より大の時 → 左舵に補正
なお、上記i)ii)で(または南)(または北)と記載しているが、i)で東に設定した場合にはii)では西に設定し、一方、i)で南に設定した場合にはii)で北に設定することを意味する。
【0083】
このようにして左舵もしくは右舵に補正することが決定した後、自動操舵装置1は決定した舵の補正方向に基づき、ずれ量ζ’の符号(+、−)を決定し、ずれ量ζ’に符号を付したずれ量ζ(=+ζ’、もしくは、−ζ’)を算出する(ステップS114)。
【0084】
なお、船舶Aが第1象限、第2象限、第3象限に位置する場合については、上記工程のうち、(3)設定航路上経度(ステップS109)、および(6)方位補正方向の算出(ステップS113)が異なる。それ以外の工程については第0象限の場合と同様である。したがって、以下に各象限における(3)および(6)について記載する。
【0085】
2.第1象限に船舶Aが位置する場合(90°≦γ<180°)
(3)設定航路上経度=基点経度+設定航路上移動経度
(6)i)現在位置が設定航路上の仮想点より東(または北)に位置する場合
船首方位が設定方位γ+−90°以内の時 → 左舵に補正
船首方位が設定方位γ+−90°より大の時 → 右舵に補正
ii)現在位置が設定航路上の仮想点より西(または南)に位置する場合
船首方位が設定方位γ+−90°以内の時 → 左舵に補正
船首方位が設定方位γ+−90°より大の時 → 右舵に補正
【0086】
3.第2象限に船舶Aが位置する場合(180°≦γ<270°)
(3)設定航路上経度=基点経度−設定航路上移動経度
(6)i)現在位置が設定航路上の仮想点より東(または南)に位置する場合
船首方位が設定方位γ+−90°以内の時 → 右舵に補正
船首方位が設定方位γ+−90°より大の時 → 左舵に補正
ii)現在位置が設定航路上の仮想点より西(または北)に位置する場合
船首方位が設定方位γ+−90°以内の時 → 左舵に補正
船首方位が設定方位γ+−90°より大の時 → 右舵に補正
【0087】
4.第3象限に船舶Aが位置する場合(270°≦γ<360°)
(3)設定航路上経度=基点経度−設定航路上移動経度
(6)i)現在位置が設定航路上の仮想点より東(または南)に位置する場合
船首方位が設定方位γ+−90°以内の時 → 右舵に補正
船首方位が設定方位γ+−90°より大の時 → 左舵に補正
ii)現在位置が設定航路上の仮想点より西(または北)に位置する場合
船首方位が設定方位γ+−90°以内の時 → 左舵に補正
船首方位が設定方位γ+−90°より大の時 → 右舵に補正
【0088】
以上のステップによって算出されたずれ量ζを用いてステップS9の方位補正量θが計算される。
【0089】
(舵の制御)
このように、本発明の自動操舵装置1は上記ステップS1〜11により算出した命令舵角ωを電気信号として電磁弁ユニット7に伝達し、これに基づき船舶Aの舵12が動作する。なお、舵12が切られると、舵12の動作を追従発信器6が検出して電気信号を自動操舵装置1の制御部に伝える。
【0090】
以上、ステップS1およびS2で、設定方位γおよび設定航路δが設定された後は、S3〜S11の制御ループにより算出された命令舵角ωによって、船舶Aの自動操舵が行われ、船舶Aを設定航路δ上にナビゲートする。
【符号の説明】
【0091】
1 自動操舵装置
2 ピックオフセンサー
3 GPSコンパス
4 ジャイロコンパス
5 航法装置
6 追従発信器
7 電磁弁ユニット
8 バッテリー
9 ポータブル発信器
10 ヘルム発信器
11 操舵ヘルム
12 舵
13 ツマミ
14 スイッチ
15 パネルスイッチ
16 表示部
【技術分野】
【0001】
本発明は、船舶の操舵の自動制御にかかるものであり、船舶を設定した航路にナビゲートする船舶の自動操舵装置および自動操舵プログラムに関する。
【背景技術】
【0002】
従来、船舶の操作を自動制御するための装置として、船舶の目標方位を設定し、その目標方位と船舶の船首方位との方位のずれが生じていた場合に、船舶の船首方位を目標方位に修正するよう船舶の舵を自動制御するための自動操舵装置および自動操舵プログラムが一般的であった(図8参照)。
【0003】
また上記以外にも、GPSナビゲーションを利用した自動操舵装置であって、GPS受信機より取得した自船位置、移動方向、移動速度を自動航路保持を行なうためのセンサーデータとして用い、目的の位置を入力することで、自船の位置から目的の位置までの航路を予測し、自船位置等のデータから舵取装置に直接指令舵角信号を出力することにより、自動的に船舶の航路を保持する装置が提案されている(例えば特許文献1参照)。また、この装置によれば、目的の位置を入力する手段として、目的の緯度および経度を入力する以外にも、電子海図表示画面にタッチパネルを装備し、電子海図上の任意の点をタッチ用のペンでタッチすることで航路を設定できるようにすることも可能である。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−90171
【発明の概要】
【発明が解決しようとする課題】
【0005】
1)しかしながら、上記した従来の一般的な自動操舵装置および自動操舵プログラムには、以下の点で改良すべき余地がある。
【0006】
目標方位と船首方位のみによる自動制御の場合、船舶の船首方位と目標方位とが同方位であったときは、船舶の船首方位の修正は行われないこととなる。つまり、潮流や風の影響により船舶の船首方位が目標方位と平行な状態で航路からずれた場合には、船舶の船首方位は修正されないまま航行することとなるため、目標の航路から外れていることに操船者が気付かず、そのまま航行してしまうおそれがある。
【0007】
2)また、上記特許文献1の船舶の自動航路保持装置には、以下の点で改良すべき余地がある。
【0008】
GPSを利用したナビゲーションシステムでは、目的位置の緯度および経度を入力しなければならないため、目的位置の入力が猥雑で時間がかかる。特に揺れの大きな小型船舶の船上において頻繁に目的位置を変更する必要がある場合などは、非常に操作がしづらい。
【0009】
3)また、特許文献1の発明によると、目的位置の入力を画面表示上の任意の点をタッチペンでタッチすることで容易に目的位置の入力ができると記載されているが、この方法においても揺れの大きな小型船舶の船上においては目的位置の入力が困難である。くわえてこのような状態でのタッチペンによる目的位置の入力では、誤った位置を入力する可能性が高い。さらに、タッチペンによる入力には電子海図データベースや画面表示にタッチパネルが必須であるため、コストがかかる。
【0010】
本発明は上述の点に鑑みてなされたもので、自動操舵装置に設けられた切替手段(例えば、スイッチやボタンなど)によって、自動操舵に切り替えるという極めて簡単で確実な操作のみで、自動的に航路が設定され、以後その設定航路に基づき、船舶が設定航路上からずれた場合に、自動的に設定航路上に船舶を航行させるよう制御する自動操舵装置を提供しようとするものである。
【課題を解決するための手段】
【0011】
上述の課題を解決するために本発明に係る自動操舵装置は、設定した航路上に船舶を保持するための制御手段を備え、手動操舵と自動操舵を切替可能な自動操舵装置であって、前記船舶の船首方位を検出する方位検出手段を備え、前記船舶の位置を検出する位置検出手段を備え、前記自動操舵に切り替えた時点における、前記方位検出手段により検出された船舶の当初船首方位と、前記位置検出手段により検出された船舶の当初位置とから、設定方位および設定航路を算出するための航路算出手段と、前記航路算出手段の算出結果により得られた前記設定方位および前記設定航路と、船舶の船首方位と、船舶の位置とから、船舶に設定航路上を航行させるため舵の動作を自動的に制御する自動制御手段とを備え、前記自動操舵装置に設けられた切替手段により、自動操舵に切り替えるだけで、前記設定航路の算出および前記自動制御ができることを特徴とする。
【0012】
上記の本発明に係る自動操舵装置によれば、操船者は自動操舵装置の切替手段によって自動操舵に切り替えるだけで、その時点における船首方位から設定航路が自動的に設定される。したがって、操船者は猥雑な目的地の入力等の操作が一切不要であり、例えばスイッチを入れるとか、ボタンを押すといった非常に簡単・確実な操作のみで、航路の設定ができる。また、航路を設定した後は、自船の船首方位と自船の位置とに基づき、船舶が設定航路上を航行するよう自動的に制御されるため、操船者の負担がかからない。さらに容易に手動操舵と自動操舵とを切り替えることが可能であるため、船舶の航路を変更する場合には、一旦手動操舵に切り替え、目標の船首方位になるよう船舶を手動操舵した後、再度切替手段により自動操舵に切り替えるだけで、簡単に設定航路を変更することができる。また本発明の自動操舵装置においては、GPSを利用した特別なナビゲーションシステム等が不要であるため、比較的安価に自動操舵装置を導入することができる。
【0013】
請求項2に記載のように、前記自動制御手段が、前記設定航路が設定された後、船舶の船首方位を取り込み、前記設定方位と前記船首方位との差に基づいて第一の方位偏差を算出する手段と、前記第一の方位偏差が所定の閾値未満である場合には、第二の方位偏差を0とし、前記第一の方位偏差が所定の閾値以上である場合には、前記第一の方位偏差から前記閾値を差し引いた値を第二の方位偏差とする手段と、前記船舶の位置を取り込み、船舶の位置と前記設定航路とのずれ量を算出し、前記ずれ量に所定の定数を乗することにより方位補正量を算出する手段と、前記第二の方位偏差と前記方位補正量との和から、第三の方位偏差を算出する手段とを備え、前記第三の方位偏差に基づき、前記設定航路上に船舶を修正移動させるよう前記舵を制御することを特徴とする。
【0014】
このようにすれば、前記背景技術の1)に記載の船首方位のみによる自動操舵装置と比較し、船舶の位置と船首方位とによって制御されるため、確実に船舶を設定航路上に航行させることができる。また、仮に前記第一の方位偏差に閾値を設定しないとすると、方位偏差が微少な場合にも船舶を設定航路上に制御するよう自動操舵装置や舵等を動作させることとなるため、潮流や風の影響を常に受ける海上においては、自動操舵装置や舵等を常に動作させることとなってしまい、自動操舵装置及び舵等に余分な負荷をかけることとなる。したがって請求項2に記載のように所定の閾値を設定することで、微少な方位偏差によっては、自動操舵装置及び舵等を頻繁に動作させることのないよう設定でき、自動操舵装置及び舵等の寿命の向上を図ることができる。
【0015】
請求項3に記載のように、前記ずれ量が、前記船舶の位置と前記設定航路との最短距離であることを特徴とする。
【0016】
このようにすれば、前記ずれ量を一定の基準に基づき算出することができる。
【0017】
請求項4に記載のように、前記位置検出手段からの情報が途絶えた場合には、前記船首方位と前記設定方位とにより、前記舵を自動的に制御することを特徴とする。
【0018】
このようにすれば、何らかの不具合によって位置検出手段からの船舶の位置が得られない場合にも、自動操舵装置が停止することなく、船首方位によって船舶を設定航路上に沿うようナビゲートすることができるため、設定航路上から大きくはずれることがない。
【0019】
請求項5に記載のように、前記設定航路の方位を修正するための入力手段を備えたことを特徴とする。
【0020】
このようにすれば、一旦設定した設定航路が操船者の望む航路でなかった場合、操船者は設定航路を簡単に修正することができる。
【0021】
請求項6に記載のように、前記位置検出手段が着脱可能なGPSコンパスまたは航法装置であることを特徴とする。
【0022】
このようにすれば、比較的安価なGPSコンパスを用いることで船舶の位置を得ることができる。また航法装置は船舶に既設の場合も多いため、新たに位置検出手段を揃える必要がなく、所有の航法装置を本発明の自動操舵装置に接続するだけで、船舶の位置情報を取得することができる。以上、操船者は位置検出手段として、GPSコンパスや航法装置を自動操舵装置に選択的に接続することができる。
【0023】
請求項7に記載のように、前記方位検出手段が接続可能なピックオフセンサーまたはGPSコンパスであることを特徴とする。
【0024】
このようにすれば、比較的安価なピックオフセンサーまたはGPSコンパスを用いて船舶の船首方位情報を得ることができ、操船者は方位検出手段として、これらを選択的に自動操舵装置に接続することができる。
【0025】
請求項8に記載のように、手動操舵と自動操舵を切替可能な船舶の自動操舵装置に、設定した航路上に船舶を保持する制御をさせるためのプログラムであって、前記自動操舵に切り替えた時点において、前記船舶の船首方位を検出する方位検出手段により検出された船舶の当初船首方位と、前記船舶の位置を検出する位置検出手段により検出された船舶の当初位置とから、設定方位および設定航路を算出した後、船舶の船首方位を取り込み、前記設定方位と前記船首方位との差に基づいて第一の方位偏差を算出し、前記第一の方位偏差が所定の閾値未満である場合には、第二の方位偏差を0とし、前記第一の方位偏差が所定の閾値以上である場合には、前記第一の方位偏差から前記閾値を差し引いた値を第二の方位偏差を算出し、船舶の位置を取り込み、船舶の位置と前記設定航路とのずれ量を算出し、前記ずれ量に所定の定数を乗することにより方位補正量を算出し、前記第二の方位偏差と前記方位補正量との和から、第三の方位偏差を算出し、前記第三の方位偏差に基づいて前記自動操舵装置が、前記設定航路上に船舶を保持するために前記舵を動作させる制御をすることを特徴とする。
【0026】
このようにすれば、操船者は自動操舵装置の切替手段によって自動操舵に切り替えるだけで、その時点における船首方位から設定航路が自動的に設定される。また、航路を設定した後は、自船の船首方位と自船の位置とに基づき、船舶が設定航路上を航行するよう自動的に制御されるため、操船者の負担がかからない。さらに、前記背景技術の1)に記載の船首方位のみによる自動操舵装置と比較し、船舶の位置と船首方位とによって制御されるため、確実に船舶を設定航路上に航行させることができる。
【0027】
請求項9に記載のように、前記ずれ量が、前記船舶の位置と前記設定航路との最短距離を算出することを特徴とする。
【0028】
このようにすれば、前記ずれ量を一定の基準に基づき算出することができる。
【0029】
請求項10に記載のように、前記位置検出手段からの情報が途絶えた場合には、前記船首方位と前記設定方位とにより、前記舵を自動的に制御することを特徴とする。
【0030】
このようにすれば、何らかの不具合によって位置検出手段からの船舶の位置が得られない場合にも、自動操舵装置が停止することなく、船首方位によって船舶を設定航路上に沿うようナビゲートすることができるため、設定航路上から大きくはずれることがない。
【0031】
請求項11に記載のように、前記設定方位および設定航路を修正するための手段によって、修正された修正設定方位および修正設定航路が設定された後において、船舶の船首方位を取り込み、前記修正設定方位と前記船首方位との差に基づいて第一の方位偏差を算出し、前記第一の方位偏差が所定の閾値未満である場合には、第二の方位偏差を0とし、前記第一の方位偏差が所定の閾値以上である場合には、前記第一の方位偏差から前記閾値を差し引いた値を第二の方位偏差を算出し、船舶の位置を取り込み、船舶の位置と前記修正設定航路とのずれ量を算出し、前記ずれ量に所定の定数を乗することにより方位補正量を算出し、前記第二の方位偏差と前記方位補正量との和から、第三の方位偏差を算出し、前記第三の方位偏差に基づいて前記自動操舵装置が、前記修正設定航路上に船舶を保持するために前記舵を動作させる制御をすることを特徴とする。
【0032】
このようにすれば、一旦設定した設定航路が操船者の望む航路でなかった場合、操船者は設定航路を簡単に修正することができる。
【発明の効果】
【0033】
本発明に係る自動操舵装置は上記の構成からなるため、次のような優れた効果がある。
【0034】
自動操舵装置の切替手段により自動操舵(モード)に入れるだけで、その時点における船首方位から設定航路(コース)が自動的に設定され、以後、船首方位と船舶の位置に基づき、設定航路上を航行するよう自動的に制御できる。このため、従来の船首方位のみに基づいた自動操舵装置に比し、より正確に、設定航路上に船舶を航行させることができる。
【0035】
また、GPSナビゲーションシステムを用いた自動操舵装置に比べ、安価に自動制御が可能であり、かつ、目的地の設定も不要であり容易に設定航路を設定することが可能である。
【図面の簡単な説明】
【0036】
【図1】本発明にかかる自動操舵装置およびこれに接続可能な機器を示したシステム図である。
【図2】(a)は、本発明にかかる自動操舵装置の正面図である。(b)は、同右側面図である。(c)は、同平面図である。(d)は、同背面図である。
【図3】本発明にかかる自動操舵装置における制御の全体を示すフローチャートである。
【図4】図3のフローチャート中、ずれ量の算出方法に関するフローチャートのうち、船舶Aが第0象限に位置する場合のものである。
【図5】(a)は、船舶Aが第0象限(グラフ中左上)に位置した場合の、自動操舵装置における制御を説明するための図である。(b)は船舶Aが第1象限(グラフ左下)に位置した場合の、同説明図である。
【図6】(a)は、船舶Aが第2象限(グラフ中左下)に位置した場合の、自動操舵装置における制御を説明するための図である。(b)は船舶Aが第3象限(グラフ右上)に位置した場合の、同説明図である。
【図7】本発明にかかる自動操舵装置の構成の概略を示すブロック図である。
【図8】従来の自動操舵装置における制御のフローチャートである。
【発明を実施するための形態】
【0037】
以下、本発明に係る船舶の自動操舵装置および自動操舵プログラムについての実施形態を図面に基づいて説明する。
【0038】
本発明の自動操舵装置1は、図1及び図2に示すように自動操舵装置1に、船舶Aの船首方位を検出するためのピックオフセンサー2またはジャイロコンパス4、船舶Aの位置および船首方位を検出するためのGPSコンパス3または航法装置5、舵の転舵角度を電気信号へ変換するための追従発信器6、自動操舵装置1の制御部からの電気信号により舵12を動作させるための電磁弁ユニット7、バッテリー8、ポータブル発信器9、ヘルム発信器10を取り付けることができる。これら機器との接続は、自動操舵装置1の背面に設けられた端子に各機器のコードをつなげる形で接続する。
【0039】
また本発明の自動操舵装置1は、図7に示すように、各機器から取得した数値等から必要な情報を算出し各機器を制御するための制御部と、制御部により算出した数値等を保存するための記憶部と、表示部16およびツマミ13、スイッチ14、パネルスイッチ15とを備える。
【0040】
以下、本実施形態においては、自動操舵装置1にピックオフセンサー2、GPSコンパス3、追従発信器6、電磁弁ユニット7、バッテリー8、ポータブル発信器9、ヘルム発信器10を接続した状態における自動操舵装置1の制御について図3のフローチャートに基づき説明する。
(制御フロー)
まず、操船者が自動操舵装置1のスイッチ14により自動操舵モードに切り替えると、それと同時に、ピックオフセンサー2が船舶Aの船首方位α1を検出し、その船首方位α1を電気信号により自動操舵装置1の制御部に伝達する。
【0041】
これを受信した自動操舵装置1の制御部は船首方位α1を設定方位γとして、自動操舵装置1の記憶部に保存する(ステップS1)。
【0042】
なお、スイッチ14による操作以外にも、自動操舵装置1のリモコン機能をもつポータブル発信器9で自動操舵モードに合わせることでも、同様の操作が可能である。
【0043】
この船首方位α1を設定方位γとして設定した自動操舵装置1の制御部は、次にGPSコンパス3が検出した船舶Aの位置β1を電気信号により取得し、位置β1を基点として、該基点から設定方位γの方向に直線状の設定航路δを設定し、自動操舵装置1の記憶部に保存する(ステップS2)。
【0044】
上記設定航路δが設定された後においては、船舶Aが設定航路δ上を航行するよう、随時、各時点における船舶Aの船首方位α2と位置β2とをピックオフセンサー2およびGPSコンパス3から電気信号により自動操舵装置1の制御部が取得し、船首方位α2と位置β2と、記憶部に保存された設定航路δおよび設定方位γとに基づいて、自動操舵装置1の制御部が命令舵角ωを算出し、自動操舵装置1の制御部が命令舵角ωを電気信号により電磁弁ユニット7に伝達し、電磁弁ユニット7が舵12を動作させる。舵12が動作すると、追従発信器6が舵12の舵角を検知し、この舵角を電気信号により自動操舵装置1の制御部に伝達する。
【0045】
具体的には、設定航路δが設定された後において、ピックオフセンサー2により検出された船首方位α2を自動操舵装置1の制御部が取得する(ステップS3)。
【0046】
そして、設定方位γと、船首方位α2との差を方位偏差(第一の方位偏差)ε1として算出する(ステップS4)。
【0047】
次に、方位偏差ε1を、あらかじめ操船者が設定した閾値ε0と比較し(ステップS5)、
ε1<ε0の場合には、方位偏差(第二の方位偏差)ε2=0とし(ステップS6−2)、
ε1≧ε0の場合には、方位偏差(第二の方位偏差)ε2=ε1−ε0と算出する(ステップS6−1)。
【0048】
この閾値ε0を定めている理由は次のとおりである。船舶は海上を航行するため潮流や風の影響を受け、常に船首方位が微少ながら変動するのが通常である。このため、閾値を設定していない場合、微少な船首方位の変化によっても自動操舵装置が動作することとなり、常に自動操舵装置1が動作している状態となってしまう。そうすると、自動操舵装置1や舵12等の機器が常時動作することとなり、それらに過度の負担がかかることとなる。したがって、微少な方位偏差については自動操舵装置1等が動作することのないよう制御するため、閾値ε0を設定するのである。なお、閾値ε0は、船舶の性能や大きさ等に応じて設定する。
【0049】
以上、ステップS3〜S6の工程によって、設定方位γと船首方位α2とによる方位偏差ε2が算出できる。
【0050】
続いて、位置情報である船舶Aの位置β2と設定航路δとによって、船舶Aの設定航路δ上からのずれ量を算出し、船舶Aを設定航路δ上に修正させるステップについて説明する。
【0051】
まず、GPSコンパス3により検出された船舶Aの位置β2を自動操舵装置1の制御部が取得する(ステップS7)。
【0052】
そして、設定航路δと船舶Aの位置β2とのずれ量ζを算出する(ステップS8−1)。なお、ずれ量ζの算出については、下記(ずれ量の算出方法)において詳細を記述する。
【0053】
また、この時、GPSコンパス3の不具合等によって、自動操舵装置1の制御部が船舶Aの位置を取得できない場合は、ずれ量ζ=0として算出する(ステップS8−2)。
【0054】
このステップS8−1もしくはステップS8−2によって算出されたずれ量ζに、あらかじめ設定した定数ηを乗することにより(数式1)、方位補正量θを算出する(ステップS9)。
【0055】
(数式1) θ=ζ×η
【0056】
なお、所定の定数ηの値とは、距離(長さ)のファクターであるずれ量ζを、方位(角度)のファクターに変換するための定数であり、船舶の大きさや性能によって設定する。
【0057】
以上ステップS7〜S9の工程によって、設定航路δと船舶の位置のずれによる方位補正量θが算出できる。
【0058】
次に、この位置のずれによる方位補正量θと、方位のずれによる方位偏差ε2とに基づいて、自動操舵装置1の制御部が最終的に船舶Aの舵12を制御するための命令舵角ωを算出する。以下、命令舵角ωを算出する工程について説明する。
【0059】
まず、方位偏差ε2と方位補正量θとを用い、下記の数式2により方位偏差(第三の方位偏差)ε3を算出する(ステップS10)。
【0060】
(数式2) ε3=ε2+θ
【0061】
そして、方位偏差ε3に任意の定数である舵角比κを乗することにより、命令舵角ωを算出する(ステップS11)。
【0062】
なお、舵角比κについては、船舶Aの進行方向を補正するための方位を、舵12を動作させる舵角に変換するための定数であり、任意の定数ηと同様、船舶の大きさや性能により操船者が任意に設定する。
【0063】
以上の工程により得られた命令舵角ωを、自動操舵装置1の制御部から電磁弁ユニット7に電気信号として伝達し、電磁弁ユニット7が舵12を動作させ、船舶Aを設定航路δ上に航行させるよう制御される。なお、ステップS1およびS2によって設定方位γと設定航路δが算出された後は、上記ステップS3〜S11の制御が繰り返し行われることによって、船舶Aが設定航路δ上を航行できることとなる。
【0064】
また、ステップS1およびS2において設定された設定方位γおよび設定航路δは、自動操舵装置1に設けられたツマミ13を回すことで、随時変更・調整することができる。このツマミ13の操作によって設定方位γおよび設定航路δが変更された後は、変更後の設定方位γ’および設定航路δ’が自動操舵装置1の記憶部に上書き保存され、上記ステップS3〜S11の制御ループが変更後の設定方位γ’および設定航路δ’に基づいて行われる。
【0065】
その他、設定方位γおよび設定航路δを変更させる方法として、操船者がスイッチ12またはポータブル発信器9を操作し、一旦自動操舵モードから手動モードに変更し、操船者の望む方位に船舶Aを操舵した後、再度スイッチ12またはポータブル発信器9で自動操舵モードに切り替えることで、設定方位γおよび設定航路δの変更を行うことができる。
【0066】
次に、上記ステップS8−1におけるずれ量ζを算出する工程について、図4〜図6に基づき詳細を説明する。
【0067】
(ずれ量ζの算出方法)
ここで、本発明におけるずれ量ζとは、船舶Aの位置と設定航路δとの最短距離、つまり船舶Aの位置から設定航路δ上におろした垂線の長さをずれ量ζの値とする。本実施形態においては、船舶Aの位置から設定航路δ線上に下ろした垂線と設定航路δとの交点を仮想位置として、船舶Aの位置の経度と仮想位置の経度との経度差μを求めることにより、ずれ量ζの値を算出することとする。以下にその工程を説明する。
【0068】
はじめに、自動操舵モードが選択された時点の船舶Aの位置を基点(X=0、Y=0)とし、東西方向にX軸(経度)、南北方向にY軸(緯度)とする球面を考え、(X=+、Y=+)の領域を第0象限、(X=+、Y=−)の領域を第1象限、(X=−、Y=−)の領域を第2象限、(X=−、Y=+)の領域を第3象限とする。なお図5及び図6のグラフは、この球面を開いて平面化したグラフである。また、設定航路δがいずれの象限に位置するかにより、ずれ量ζの算出方法が異なるため、各象限にわけて説明する。
【0069】
設定航路δがいずれの象限に位置するかを算出する手順は、まず基点を中心にY軸(+側(北側))から時計回りに設定航路δまでの角度、つまり設定方位γを、自動操舵装置1の制御部が取得する(ステップS101)
次に、制御部はこの設定方位γを90°で割り、その値の整数部分をその象限とする(ステップS102)。
【0070】
象限=γ÷90°の整数部
1.第0象限に船舶Aが位置する場合(0≦γ<90°)
(1)上記ステップS102の式により船舶Aが第0象限に位置する場合、以下の式によって、船舶Aの基点から現在位置までの移動緯度を算出する。なお、移動緯度を算出する過程において、基点と現在位置との位置関係によって算出に用いる式が異なるため、i)現在位置の緯度と基点緯度が北半球または南半球で同一半球上に位置する場合と、ii)異なる半球上に位置する場合とにわける(ステップS103)。
【0071】
ステップS103により振り分けられた後、以下の式によって移動緯度をそれぞれ算出する。
i) 移動緯度=|現在位置緯度−基点緯度|(ステップS104−1)
ii)移動緯度=現在位置緯度+基点緯度(ステップS104−2)
【0072】
(2−1)次に、経度差μを求めるための準備として、基点緯度と現在位置緯度との平均緯度を算出する。この場合も、i)基点と現在位置が共に北半球または南半球にある場合と、ii)異なる場合とにわける(ステップS105)
そして、ステップS105により振り分けられた後、以下の式によって平均緯度をそれぞれ算出する。
i) 平均緯度=(現在位置緯度+基点緯度)/2(ステップS106−1)
ii)平均緯度=|現在位置緯度−基点緯度|/2 (ステップS106−2)
【0073】
(2−2)平均緯度が算出された後、COS(平均緯度)を算出する(ステップS107)。
【0074】
これは、最終的にずれ量ζの値として距離(長さ)を求める必要があるが、上記のXY平面上においては経度と緯度により船舶Aの位置を特定している。そうすると、実際の地球は球形であるため、たとえ同じ経度差であっても緯度が異なることで、実際の距離(長さ)の値は大きく異なることとなる。例えば北極圏付近での経度10°の差異による距離と、赤道付近での経度10°の差異による距離とでは、大きく異なる値となる。
【0075】
そこで、ずれ量ζを求めるにあたり、緯度によって異なる経度差を距離(長さ)に補正するために、このCOS(平均緯度)を利用する。なお、COS(平均緯度)は以下の式で求める。
【0076】
COS(平均緯度)=COS(deg)×(COS(min)×COS(sec)−SIN(min)×SIN(sec))−SIN(deg)(SIN(min)×COS(sec)+COS(min)×SIN(sec))
deg:平均緯度の度成分
min:平均緯度の分成分
sec:平均緯度の秒成分
【0077】
(3)次に、設定航路δ上の仮想点における経度を、以下の式により計算する。
基点から仮想点までの仮想移動経度=現在位置移動緯度×(tanγ/COS(平均緯度))(ステップS108)
仮想点経度=基点経度+基点から仮想点までの仮想移動経度 (ステップS109)
【0078】
(4)上記式より、設定航路上の仮想点経度が求められたので、現在位置経度との差をとる。この際、仮想点と現在位置との位置関係により、これらの経度誤差の算出式が異なるため、次のように場合わけする。i)仮想点経度と現在位置経度とが共に東経又は西経に位置する場合、ii)0度を境界に東経と西経にわかれる場合、iii)180度を境界に東経と西経にわかれる場合にわける(ステップS110)。
【0079】
ステップS110により振り分けられた後、以下の式により、経度誤差を算出する。
i) 経度誤差=|仮想点経度−現在位置経度| (ステップS111−1)
ii) 経度誤差=|仮想点経度+現在位置経度| (ステップS111−2)
iii)経度誤差=|360°−(仮想点経度+現在位置経度)| (ステップS111−3)
【0080】
(5)続いて、上記4)で求めた経度誤差に1/COSγを乗することで、ずれ量ζのスカラー量であるずれ量ζ’を算出する(ステップS112)。
ずれ量ζ’=|経度誤差×1/COSγ|
【0081】
(6)以上の工程により算出されたずれ量ζ’は、上記ステップS112の式にある通り、必ず正の値を取るずれ量ζのスカラー量であるため、ずれ量ζを求めるためにはいずれの方位に補正するかを決定し、符号を算出する必要がある。そこで、いずれの方向に方位補正するかを、以下の条件に基づいて算出する(ステップS113)。
【0082】
i)現在位置が設定航路上の仮想点より東(または南)に位置する場合
船首方位が設定方位γ+−90°以内の時 → 左舵に補正
船首方位が設定方位γ+−90°より大の時 → 右舵に補正
ii)現在位置が設定航路上の仮想点より西(または北)に位置する場合
船首方位が設定方位γ+−90°以内の時 → 右舵に補正
船首方位が設定方位γ+−90°より大の時 → 左舵に補正
なお、上記i)ii)で(または南)(または北)と記載しているが、i)で東に設定した場合にはii)では西に設定し、一方、i)で南に設定した場合にはii)で北に設定することを意味する。
【0083】
このようにして左舵もしくは右舵に補正することが決定した後、自動操舵装置1は決定した舵の補正方向に基づき、ずれ量ζ’の符号(+、−)を決定し、ずれ量ζ’に符号を付したずれ量ζ(=+ζ’、もしくは、−ζ’)を算出する(ステップS114)。
【0084】
なお、船舶Aが第1象限、第2象限、第3象限に位置する場合については、上記工程のうち、(3)設定航路上経度(ステップS109)、および(6)方位補正方向の算出(ステップS113)が異なる。それ以外の工程については第0象限の場合と同様である。したがって、以下に各象限における(3)および(6)について記載する。
【0085】
2.第1象限に船舶Aが位置する場合(90°≦γ<180°)
(3)設定航路上経度=基点経度+設定航路上移動経度
(6)i)現在位置が設定航路上の仮想点より東(または北)に位置する場合
船首方位が設定方位γ+−90°以内の時 → 左舵に補正
船首方位が設定方位γ+−90°より大の時 → 右舵に補正
ii)現在位置が設定航路上の仮想点より西(または南)に位置する場合
船首方位が設定方位γ+−90°以内の時 → 左舵に補正
船首方位が設定方位γ+−90°より大の時 → 右舵に補正
【0086】
3.第2象限に船舶Aが位置する場合(180°≦γ<270°)
(3)設定航路上経度=基点経度−設定航路上移動経度
(6)i)現在位置が設定航路上の仮想点より東(または南)に位置する場合
船首方位が設定方位γ+−90°以内の時 → 右舵に補正
船首方位が設定方位γ+−90°より大の時 → 左舵に補正
ii)現在位置が設定航路上の仮想点より西(または北)に位置する場合
船首方位が設定方位γ+−90°以内の時 → 左舵に補正
船首方位が設定方位γ+−90°より大の時 → 右舵に補正
【0087】
4.第3象限に船舶Aが位置する場合(270°≦γ<360°)
(3)設定航路上経度=基点経度−設定航路上移動経度
(6)i)現在位置が設定航路上の仮想点より東(または南)に位置する場合
船首方位が設定方位γ+−90°以内の時 → 右舵に補正
船首方位が設定方位γ+−90°より大の時 → 左舵に補正
ii)現在位置が設定航路上の仮想点より西(または北)に位置する場合
船首方位が設定方位γ+−90°以内の時 → 左舵に補正
船首方位が設定方位γ+−90°より大の時 → 右舵に補正
【0088】
以上のステップによって算出されたずれ量ζを用いてステップS9の方位補正量θが計算される。
【0089】
(舵の制御)
このように、本発明の自動操舵装置1は上記ステップS1〜11により算出した命令舵角ωを電気信号として電磁弁ユニット7に伝達し、これに基づき船舶Aの舵12が動作する。なお、舵12が切られると、舵12の動作を追従発信器6が検出して電気信号を自動操舵装置1の制御部に伝える。
【0090】
以上、ステップS1およびS2で、設定方位γおよび設定航路δが設定された後は、S3〜S11の制御ループにより算出された命令舵角ωによって、船舶Aの自動操舵が行われ、船舶Aを設定航路δ上にナビゲートする。
【符号の説明】
【0091】
1 自動操舵装置
2 ピックオフセンサー
3 GPSコンパス
4 ジャイロコンパス
5 航法装置
6 追従発信器
7 電磁弁ユニット
8 バッテリー
9 ポータブル発信器
10 ヘルム発信器
11 操舵ヘルム
12 舵
13 ツマミ
14 スイッチ
15 パネルスイッチ
16 表示部
【特許請求の範囲】
【請求項1】
設定した航路上に船舶を保持するための制御手段を備え、手動操舵と自動操舵を切替可能な船舶の自動操舵装置であって、
前記船舶の船首方位を検出する方位検出手段と、
前記船舶の位置を検出する位置検出手段と、
前記自動操舵に切り替えた時点における、前記方位検出手段により検出された船舶の当初船首方位と、前記位置検出手段により検出された船舶の当初位置とから、設定方位および設定航路を算出するための航路算出手段と、
前記航路算出手段の算出結果により得られた前記設定方位および前記設定航路と、船舶の船首方位と、船舶の位置とから、船舶に設定航路上を航行させるため舵の動作を自動的に制御する自動制御手段とを備え、
前記自動操舵装置に設けられた切替手段により、自動操舵に切り替えるだけで、前記設定航路の算出および前記自動制御ができることを特徴とする船舶の自動操舵装置。
【請求項2】
前記自動制御手段が、
前記設定航路が設定された後、船舶の船首方位を取り込み、前記設定方位と前記船首方位との差に基づいて第一の方位偏差を算出する手段と、
前記第一の方位偏差が所定の閾値未満である場合には、第二の方位偏差を0とし、前記第一の方位偏差が所定の閾値以上である場合には、前記第一の方位偏差から前記閾値を差し引いた値を第二の方位偏差とする手段と、
前記船舶の位置を取り込み、船舶の位置と前記設定航路とのずれ量を算出し、前記ずれ量に所定の定数を乗することにより方位補正量を算出する手段と、
前記第二の方位偏差と前記方位補正量との和から、第三の方位偏差を算出する手段とを備え、
前記第三の方位偏差に基づき、前記設定航路上に船舶を修正移動させるよう前記舵を制御することを特徴とする請求項1に記載の船舶の自動操舵装置。
【請求項3】
前記ずれ量が、前記船舶の位置と前記設定航路との最短距離であることを特徴とする請求項2に記載の船舶の自動操舵装置。
【請求項4】
前記位置検出手段からの情報が途絶えた場合には、前記船首方位と前記設定方位とにより、前記舵を自動的に制御することを特徴とする請求項1〜3のいずれか1項に記載の船舶の自動操舵装置。
【請求項5】
前記設定方位および設定航路を修正するための手段を備えたことを特徴とする請求項1〜4のいずれか1項に記載の船舶の自動操舵装置。
【請求項6】
前記位置検出手段が着脱可能なGPSコンパスまたは航法装置であることを特徴とする1〜5のいずれか1項に記載の船舶の自動操舵装置。
【請求項7】
前記方位検出手段が着脱可能なピックオフセンサーまたはGPSコンパスであることを特徴とする請求項1〜6のいずれか1項に記載の船舶の自動操舵装置。
【請求項8】
手動操舵と自動操舵を切替可能な船舶の自動操舵装置に、設定した航路上に船舶を保持する制御をさせるためのプログラムであって、
前記自動操舵に切り替えた時点において、前記船舶の船首方位を検出する方位検出手段により検出された船舶の当初船首方位と、前記船舶の位置を検出する位置検出手段により検出された船舶の当初位置とから、設定方位および設定航路を算出した後、
船舶の船首方位を取り込み、前記設定方位と前記船首方位との差に基づいて第一の方位偏差を算出し、
前記第一の方位偏差が所定の閾値未満である場合には、第二の方位偏差を0とし、前記第一の方位偏差が所定の閾値以上である場合には、前記第一の方位偏差から前記閾値を差し引いた値を第二の方位偏差を算出し、
船舶の位置を取り込み、船舶の位置と前記設定航路とのずれ量を算出し、
前記ずれ量に所定の定数を乗することにより方位補正量を算出し、
前記第二の方位偏差と前記方位補正量との和から、第三の方位偏差を算出し、
前記第三の方位偏差に基づいて前記自動操舵装置が、前記設定航路上に船舶を保持するために前記舵を動作させる制御をすることを特徴とする船舶の自動操舵プログラム。
【請求項9】
前記ずれ量が、前記船舶の位置と前記設定航路との最短距離を算出することを特徴とする請求項8に記載の船舶の自動操舵プログラム。
【請求項10】
前記位置検出手段からの情報が途絶えた場合には、前記船首方位と前記設定方位とにより、前記舵を自動的に制御することを特徴とする請求項8または9に記載の船舶の自動操舵プログラム。
【請求項11】
前記設定方位および設定航路を修正するための手段によって、修正された修正設定方位および修正設定航路が設定された後において、
船舶の船首方位を取り込み、前記修正設定方位と前記船首方位との差に基づいて第一の方位偏差を算出し、
前記第一の方位偏差が所定の閾値未満である場合には、第二の方位偏差を0とし、前記第一の方位偏差が所定の閾値以上である場合には、前記第一の方位偏差から前記閾値を差し引いた値を第二の方位偏差を算出し、
船舶の位置を取り込み、船舶の位置と前記修正設定航路とのずれ量を算出し、
前記ずれ量に所定の定数を乗することにより方位補正量を算出し、
前記第二の方位偏差と前記方位補正量との和から、第三の方位偏差を算出し、
前記第三の方位偏差に基づいて前記自動操舵装置が、前記修正設定航路上に船舶を保持するために前記舵を動作させる制御をすることを特徴とする船舶の自動操舵プログラム。
【請求項1】
設定した航路上に船舶を保持するための制御手段を備え、手動操舵と自動操舵を切替可能な船舶の自動操舵装置であって、
前記船舶の船首方位を検出する方位検出手段と、
前記船舶の位置を検出する位置検出手段と、
前記自動操舵に切り替えた時点における、前記方位検出手段により検出された船舶の当初船首方位と、前記位置検出手段により検出された船舶の当初位置とから、設定方位および設定航路を算出するための航路算出手段と、
前記航路算出手段の算出結果により得られた前記設定方位および前記設定航路と、船舶の船首方位と、船舶の位置とから、船舶に設定航路上を航行させるため舵の動作を自動的に制御する自動制御手段とを備え、
前記自動操舵装置に設けられた切替手段により、自動操舵に切り替えるだけで、前記設定航路の算出および前記自動制御ができることを特徴とする船舶の自動操舵装置。
【請求項2】
前記自動制御手段が、
前記設定航路が設定された後、船舶の船首方位を取り込み、前記設定方位と前記船首方位との差に基づいて第一の方位偏差を算出する手段と、
前記第一の方位偏差が所定の閾値未満である場合には、第二の方位偏差を0とし、前記第一の方位偏差が所定の閾値以上である場合には、前記第一の方位偏差から前記閾値を差し引いた値を第二の方位偏差とする手段と、
前記船舶の位置を取り込み、船舶の位置と前記設定航路とのずれ量を算出し、前記ずれ量に所定の定数を乗することにより方位補正量を算出する手段と、
前記第二の方位偏差と前記方位補正量との和から、第三の方位偏差を算出する手段とを備え、
前記第三の方位偏差に基づき、前記設定航路上に船舶を修正移動させるよう前記舵を制御することを特徴とする請求項1に記載の船舶の自動操舵装置。
【請求項3】
前記ずれ量が、前記船舶の位置と前記設定航路との最短距離であることを特徴とする請求項2に記載の船舶の自動操舵装置。
【請求項4】
前記位置検出手段からの情報が途絶えた場合には、前記船首方位と前記設定方位とにより、前記舵を自動的に制御することを特徴とする請求項1〜3のいずれか1項に記載の船舶の自動操舵装置。
【請求項5】
前記設定方位および設定航路を修正するための手段を備えたことを特徴とする請求項1〜4のいずれか1項に記載の船舶の自動操舵装置。
【請求項6】
前記位置検出手段が着脱可能なGPSコンパスまたは航法装置であることを特徴とする1〜5のいずれか1項に記載の船舶の自動操舵装置。
【請求項7】
前記方位検出手段が着脱可能なピックオフセンサーまたはGPSコンパスであることを特徴とする請求項1〜6のいずれか1項に記載の船舶の自動操舵装置。
【請求項8】
手動操舵と自動操舵を切替可能な船舶の自動操舵装置に、設定した航路上に船舶を保持する制御をさせるためのプログラムであって、
前記自動操舵に切り替えた時点において、前記船舶の船首方位を検出する方位検出手段により検出された船舶の当初船首方位と、前記船舶の位置を検出する位置検出手段により検出された船舶の当初位置とから、設定方位および設定航路を算出した後、
船舶の船首方位を取り込み、前記設定方位と前記船首方位との差に基づいて第一の方位偏差を算出し、
前記第一の方位偏差が所定の閾値未満である場合には、第二の方位偏差を0とし、前記第一の方位偏差が所定の閾値以上である場合には、前記第一の方位偏差から前記閾値を差し引いた値を第二の方位偏差を算出し、
船舶の位置を取り込み、船舶の位置と前記設定航路とのずれ量を算出し、
前記ずれ量に所定の定数を乗することにより方位補正量を算出し、
前記第二の方位偏差と前記方位補正量との和から、第三の方位偏差を算出し、
前記第三の方位偏差に基づいて前記自動操舵装置が、前記設定航路上に船舶を保持するために前記舵を動作させる制御をすることを特徴とする船舶の自動操舵プログラム。
【請求項9】
前記ずれ量が、前記船舶の位置と前記設定航路との最短距離を算出することを特徴とする請求項8に記載の船舶の自動操舵プログラム。
【請求項10】
前記位置検出手段からの情報が途絶えた場合には、前記船首方位と前記設定方位とにより、前記舵を自動的に制御することを特徴とする請求項8または9に記載の船舶の自動操舵プログラム。
【請求項11】
前記設定方位および設定航路を修正するための手段によって、修正された修正設定方位および修正設定航路が設定された後において、
船舶の船首方位を取り込み、前記修正設定方位と前記船首方位との差に基づいて第一の方位偏差を算出し、
前記第一の方位偏差が所定の閾値未満である場合には、第二の方位偏差を0とし、前記第一の方位偏差が所定の閾値以上である場合には、前記第一の方位偏差から前記閾値を差し引いた値を第二の方位偏差を算出し、
船舶の位置を取り込み、船舶の位置と前記修正設定航路とのずれ量を算出し、
前記ずれ量に所定の定数を乗することにより方位補正量を算出し、
前記第二の方位偏差と前記方位補正量との和から、第三の方位偏差を算出し、
前記第三の方位偏差に基づいて前記自動操舵装置が、前記修正設定航路上に船舶を保持するために前記舵を動作させる制御をすることを特徴とする船舶の自動操舵プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2011−16384(P2011−16384A)
【公開日】平成23年1月27日(2011.1.27)
【国際特許分類】
【出願番号】特願2009−160419(P2009−160419)
【出願日】平成21年7月7日(2009.7.7)
【出願人】(392000497)マロール株式会社 (9)
【Fターム(参考)】
【公開日】平成23年1月27日(2011.1.27)
【国際特許分類】
【出願日】平成21年7月7日(2009.7.7)
【出願人】(392000497)マロール株式会社 (9)
【Fターム(参考)】
[ Back to top ]