
船舶情報収集装置
【課題】船舶の航行に伴って種々の船舶情報を収集し、収集した膨大な量の船舶情報から船舶の保守管理及び設計等に有用な情報を的確に陸上の装置へ送信することができる船舶情報収集装置を提供する。
【解決手段】VDR22が検出した船舶情報と、船舶情報収集装置24にアークネット14を介して接続された主機15、発電機16及びボイラ17等の各種機器から検出した船舶情報とを、船舶情報収集装置24が所定のデータ形式で船舶情報DBに蓄積する。船舶情報収集装置24は、蓄積した船舶情報を定期的に陸上の装置へ送信する。また陸上の装置から送信要求が与えられた場合、船舶情報収集装置24は、送信要求に含まれる条件に応じて船舶情報DBから船舶情報を検索し、条件に該当する船舶情報を陸上の装置へ送信する。また船内作業用PC23にて船員が入力した船舶情報を船舶情報収集装置24が船舶情報DBに蓄積する。
【解決手段】VDR22が検出した船舶情報と、船舶情報収集装置24にアークネット14を介して接続された主機15、発電機16及びボイラ17等の各種機器から検出した船舶情報とを、船舶情報収集装置24が所定のデータ形式で船舶情報DBに蓄積する。船舶情報収集装置24は、蓄積した船舶情報を定期的に陸上の装置へ送信する。また陸上の装置から送信要求が与えられた場合、船舶情報収集装置24は、送信要求に含まれる条件に応じて船舶情報DBから船舶情報を検索し、条件に該当する船舶情報を陸上の装置へ送信する。また船内作業用PC23にて船員が入力した船舶情報を船舶情報収集装置24が船舶情報DBに蓄積する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、船舶の航行中に得られる情報を収集すると共に、収集した情報を陸上の装置へ送信する船舶情報収集装置に関する。
【背景技術】
【0002】
船舶の航行中に得られる情報、例えば船舶の航行速度、航行方位及び航行位置等の船舶航行に係る情報、船舶周辺の風向、風速及び天候等の船舶の航行環境に係る情報、並びに、船舶のエンジンの出力及び燃費等の船舶設備に係る情報等は、船舶の保守管理、船舶の故障などの異常発見、船舶の航行管理及び船舶の設計等に有用な情報である。このため従来は、船舶の航行中にこれらの船舶情報を収集しておき、船舶が港などに停泊した際に、収集した船舶情報を可搬型の記録媒体などに記録して陸上の作業者へ受け渡すなどの方法により、収集した船舶情報を船舶の保守管理及び設計等に用いていた。
【0003】
また、特許文献1においては、船舶に設置されているパーソナルコンピュータが通信衛星及び衛星基地局を介して船舶情報を船舶情報仲介装置へ送信し、船舶情報仲介装置が受信した船舶情報を各船舶の管理会社毎に定められた書式に編集し、編集した船舶情報を管理会社に設置されているパーソナルコンピュータへ送信する構成とすることにより、船舶から送信される船舶情報に書式情報が含まれない仕様として、船舶情報を安価に送信することができる船舶情報仲介システム及び船舶情報仲介装置が提案されている。
【0004】
特許文献1に記載の船舶情報仲介システムのように、船舶に設置されたコンピュータが通信衛星及び衛星基地局を介して陸上の装置へ無線送信する構成とすることによって、船舶が港などに停泊した際に船舶情報を記録媒体などに記録して授受する方法と比較して、船舶情報のフィードバックをより早期に行うことができる。ただし、通信衛星などを利用した無線通信は通信コストが高いという問題があるため、特許文献1に記載の船舶情報仲介システムは送受信する情報量を低減することで通信コストを抑制している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2001−283145号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら近年においては、通信技術の進歩に伴って、通信衛星などを介した船舶の通信装置と陸上の通信装置との通信が高速化され、大量のデータを短時間に送受信することが可能となってきており、上述のような通信コストに係る問題が解消されてきている。
【0007】
また、船舶の航行が長期間に亘る場合、航行中に収集される船舶情報の量は膨大である。通信技術の進歩に伴って、船舶の通信装置から陸上の通信装置へ大量の船舶情報を送信することが可能となったとしても、膨大な船舶情報から船舶の保守管理及び設計等に有用な情報を取得することは容易ではない。
【0008】
本発明は、斯かる事情に鑑みてなされたものであって、その目的とするところは、船舶の航行に伴って種々の船舶情報を収集し、陸上の通信装置との間で船舶情報の授受を行うことができると共に、収集された膨大な量の船舶情報から船舶の保守管理及び設計等に有用な情報を的確に授受することができる船舶情報収集装置を提供することにある。
【課題を解決するための手段】
【0009】
本発明に係る船舶情報収集装置は、船舶に搭載され、該船舶の航行に係る情報又は該船舶内の設備に係る情報を検出する船舶情報検出手段と、前記船舶情報検出手段が検出した情報を所定のデータ形式に変換して蓄積する情報蓄積手段と、陸上に設置された装置との間で情報の送受信を行う無線通信手段と、前記情報蓄積手段に蓄積した情報を、前記無線通信手段により陸上の装置へ定期的に送信する定期送信手段と、陸上の装置からの情報送信要求を前記無線通信手段により受信する要求受信手段と、前記情報蓄積手段が蓄積した情報から、前記要求受信手段が受信した情報送信要求に含まれる送信条件に応じた情報を検索する情報検索手段と、該情報検索手段が検索した情報を、前記無線通信手段により陸上の装置へ送信する応答送信手段とを備えることを特徴とする。
【0010】
また、本発明に係る船舶情報収集装置は、情報の入力を受け付ける情報受付手段と、情報の送信指示を受け付ける指示受付手段と、該指示受付手段が情報の送信指示を受け付けた場合に、前記情報蓄積手段に蓄積した情報を、前記無線通信手段により陸上の装置へ送信する指示送信手段とを更に備え、前記情報蓄積手段は、前記情報受付手段が受け付けた情報を所定のデータ形式に変換して蓄積するようにしてあることを特徴とする。
【0011】
また、本発明に係る船舶情報収集装置は、前記情報蓄積手段が、蓄積する情報を所定のデータ形式に変換する際に、日付及び時刻に係る情報を前記情報検索手段による検索用情報として含むデータ形式に変換するようにしてあることを特徴とする。
【0012】
また、本発明に係る船舶情報収集装置は、前記日付及び時刻に係る情報は、UTC(Coordinated Universal Time、協定世界時)に基づく日付及び時刻であることを特徴とする。
【0013】
また、本発明に係る船舶情報収集装置は、前記船舶情報検出手段が検出する情報には、前記船舶内の設備の振動に係る情報、前記船舶内の設備が発する音に係る情報、又は、前記船舶の傾斜に係る情報を含むことを特徴とする。
【0014】
また、本発明に係る船舶情報収集装置は、前記船舶情報検出手段が検出した情報に応じて、前記船舶の異常を検知する異常検知手段を備え、前記情報蓄積手段は、前記船舶情報検出手段が検出した情報の蓄積を定期的に行うと共に、前記異常検知手段が異常を検知した場合に前記船舶情報検出手段が検出した情報を蓄積するようにしてあることを特徴とする。
【0015】
また、本発明に係る船舶情報収集装置は、前記船舶情報検出手段が検出した情報を、現時点から所定時間前まで記憶する記憶手段を備え、前記情報蓄積手段は、所定の蓄積タイミングにて前記記憶手段から情報を読み出して蓄積するようにしてあることを特徴とする。
【0016】
本発明においては、船舶の航行速度、航行方位、風向及び風速等のように船舶の航行に係る情報、並びに船舶のエンジンの出力及び燃費等の船舶設備に係る情報等を検出し、これらの種々の情報(以下、単に船舶情報という)を所定のデータ形式に変換して蓄積する。これにより、船舶情報のデータベースを船舶に設けることができる。船舶情報収集装置には、通信衛星などを介した無線通信により陸上の装置との間でデータの送受信を行う手段を設け、データベースに蓄積した船舶情報を定期的に陸上の装置へ送信する。
また本発明の船舶情報収集装置は、蓄積した船舶情報の送信要求を、陸上の装置から無線通信により受信して受け付けることができる。この送信要求には、送信する船舶情報の条件を含めることができ、船舶情報収集装置は受信した送信要求に含まれる送信条件に応じて、データベースに蓄積した多くの船舶情報から所望の船舶情報を検索して抽出し、この船舶情報を無線通信により陸上の装置へ送信する。これにより船舶の管理者又は設計者等は、陸上の装置を用いて、必要な船舶情報のみを必要なときに船舶情報収集装置から取得することができる。
【0017】
また、本発明においては、積み付け計算又は航海日誌のように、船舶の船員が入力する情報を受け付けて、受け付けた船舶情報を所定のデータ形式に変換して蓄積する。このように、より多くの情報を船舶情報収集装置が一元的に蓄積することによって、船舶情報の管理及び陸上の装置への送信等を効率よく行うことができる。
また船員が入力した送信指示を受け付けて、蓄積した船舶情報の送信を送信指示に応じて行うことによって、船員が有用と判断した船舶情報を陸上の装置へ送信することができる。
【0018】
また、本発明においては、日付及び時刻の条件を指定して船舶情報の検索を行うことができるように、蓄積する日付及び時刻に係る情報を検索用情報として含めたデータ形式に船舶情報を変換してデータベースへの蓄積を行う。これにより、陸上の装置から日付及び時刻を指定して船舶情報の送信要求を船舶情報収集装置へ与えることができ、所望の日付及び時刻の船舶情報のみを取得することができる。なお、船舶の航行は広範囲に亘って行われる可能性があるため、UTCに基づく日付及び時刻を用いることが好ましい。
【0019】
また、本発明においては、船舶のエンジンなどの設備が発する振動若しくは音、又は船舶の船体の傾斜に係る情報を検出して船舶情報としてデータベースに蓄積する。振動の検出は例えば振動計を用いて行うことができ、音の検出は例えばマイクを用いて行うことができ、また船体の傾斜の検出は例えば傾斜計を用いて行うことができる。
例えば船舶のエンジンが発する振動又は音を検出することにより、エンジンに異常が生じているか否かを判断することができ、エンジンの保守管理にこれらの情報を用いることができる。また例えば船体の傾斜を検出することにより、風向及び波高等の他の情報と共に船体の傾斜を調べることで、船舶の性能評価などを行うことができる。また、これらの船舶情報に基づいて、船舶に異常が発生しているか否かを判断することもできる。
【0020】
また、本発明においては、検出した船舶情報に応じて船舶の異常を検知する。例えば船舶のエンジンが発する振動若しくは音が閾値を超えた場合、又は船舶の傾斜が閾値を超えた場合等に船舶の異常を検知する構成とすることができる。
船舶情報蓄積装置は、船舶情報の蓄積を予め定められた周期(例えば10分毎又は1時間毎等)で定期的に行うと共に、船舶の異常を検知した場合に船舶情報の蓄積を行う。これにより、船舶に異常が発生したときの前後の船舶情報を蓄積しておくことができ、異常発生の原因究明などに役立てることができる。
【0021】
また、本発明においては、船舶情報の検出を所定の周期(ただし、船舶情報の蓄積周期より短い周期)で行い、検出した船舶情報をメモリなどの記憶手段に一時的に記憶しておく。記憶手段には、検出した船舶情報を上書きしながら記憶していき、最新の検出を行った時点(現時点)から所定時間前までの船舶情報を記憶しておく。船舶情報の定期的な蓄積又は異常発生時の蓄積等のように、検出した船舶情報を蓄積するタイミングに達した場合には、記憶手段に記憶した所定時間分の船舶情報を読み出して蓄積する。
これにより、船舶情報の蓄積を所定時間分毎に行うことができる。また異常発生時などには、異常発生から所定時間前までの船舶情報を蓄積することができるため、異常発生の原因究明などをより確実に行うことが可能となる。
【発明の効果】
【0022】
本発明による場合は、検出した船舶情報を船舶情報収集装置がデータベースとして蓄積しておき、陸上の装置からの送信要求に応じて必要な船舶情報を船舶情報収集装置が検索して送信する構成とすることにより、陸上の船舶管理者又は船舶設計者等が必要な情報を確実に取得することができる。また船舶情報収集装置は、定期的な船舶情報の送信及び船員の指示による船舶情報の送信等を行うこともできるため、陸上の装置は船舶情報の使用目的などに適したいずれかの方法により、船舶からの船舶情報を受信することができる。よって、船舶情報収集装置と陸上の装置との間で船舶情報の送受信を効率よく行うことができ、収集された膨大な船舶情報から必要な情報を陸上の装置にて得ることができるため、船舶情報を用いた船舶の保守管理、運行管理及び船舶設計等をより効率的に行うことができる。
【図面の簡単な説明】
【0023】
【図1】船舶と陸上の装置との通信を説明するための模式図である。
【図2】船舶に搭載された船舶情報収集システムの構成を示すブロック図である。
【図3】船舶情報収集装置の構成を示すブロック図である。
【図4】船舶情報収集装置によるアークネットを介した船舶情報の収集処理を説明するための模式図である。
【図5】船舶情報収集装置が行うアークネットを介した船舶情報の収集処理の手順を示すフローチャートである。
【図6】船舶情報DBに蓄積される船舶情報の一構成例を示す模式図である。
【図7】船舶情報DBに蓄積される船舶情報の一構成例を示す模式図である。
【図8】船舶情報DBに蓄積される船舶情報の一構成例を示す模式図である。
【図9】船舶情報DBに蓄積される船舶情報の一構成例を示す模式図である。
【図10】船舶情報DBに蓄積される船舶情報の一構成例を示す模式図である。
【図11】船舶情報収集装置が行う船内LANを介した船舶情報の収集処理の手順を示すフローチャートである。
【図12】船舶情報収集装置による船舶情報の定期送信処理の手順を示すフローチャートである。
【図13】船舶情報収集装置による船舶情報送信処理の手順を示すフローチャートである。
【図14】船舶情報収集装置による船舶情報の異常時送信処理の手順を示すフローチャートである。
【図15】船舶情報収集装置による船舶情報の指示送信処理の手順を示すフローチャートである。
【図16】船舶情報収集装置による船舶情報の応答送信処理の手順を示すフローチャートである。
【発明を実施するための形態】
【0024】
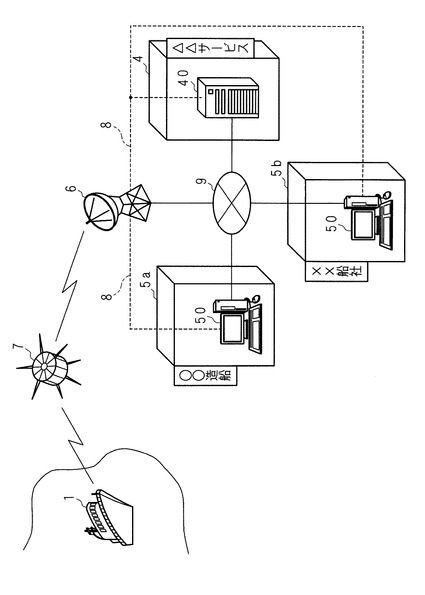
以下、本発明をその実施の形態を示す図面に基づき具体的に説明する。図1は、船舶と陸上の装置との通信を説明するための模式図である。図において1は船舶であり、海洋を航行して貨物の運搬などを行う。船舶1には、航行速度、航行方向及び航行位置等の船舶航行に係る情報、船舶1周辺の風向、風速及び天候等の航行環境に係る情報、並びに、船舶1のエンジンの出力及び燃費等の船舶設備に係る情報等を検出して収集する船舶情報収集システム2(図2にて図示する)が搭載されている。
【0025】
船舶1に搭載された船舶情報収集システム2は、通信衛星7を利用した無線通信を行う機能を有しており、陸上のサービス提供会社4に設置されたサーバ装置40、造船会社5aに設置されたPC(Personal Computer)50又は船舶管理会社5bに設置されたPC50等との間で無線通信によるデータの送受信を行うことができる。通信衛星7は、例えばFBB(Fleet Broad-Band)用の通信衛星であり、船舶1に搭載された船舶情報収集システム2と、陸上に設けられた地上局6との間での無線信号の中継を行うことができる。地上局6は、インターネット網9及び電話回線網8等を介して、サービス提供会社4に設置されたサーバ装置40、造船会社5aに設置されたPC50及び船舶管理会社5bに設置されたPC50等との間で、データの送受信を行うことができる。よって船舶1に搭載された船舶情報収集システム2は、通信衛星7及び地上局6を介して、サーバ装置40及びPC50等との通信を行うことができる。
【0026】
サービス提供会社4のサーバ装置40、造船会社5aのPC50及び船舶管理会社5bのPC50は、インターネット網9又は電話回線網8のいずれを利用しても地上局8との通信を行うことができる。いずれの通信網を利用して通信を行うかは、通信速度及び送受信するデータ量等を考慮して適宜に選択すればよい。例えば、船舶1の船舶情報収集システム2から大容量のデータを受信する場合にはインターネット網9を利用し、船舶情報収集システム2へ小容量のデータを送信する場合には電話回線網8を利用するなどの構成とすることができる。なお、サーバ装置40及びPC50は、インターネット網9及び電話回線網8のいずれか一方のみを利用して通信を行う構成であってもよい。
【0027】
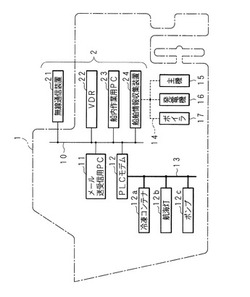
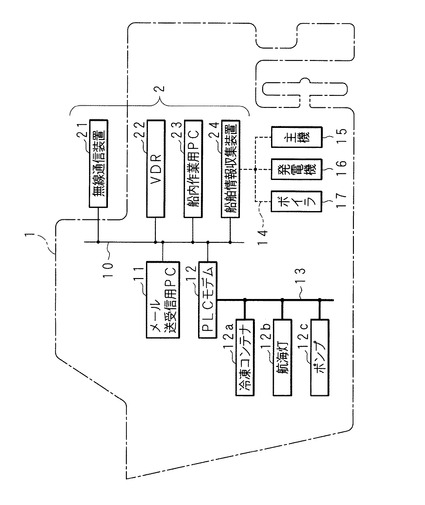
図2は、船舶1に搭載された船舶情報収集システム2の構成を示すブロック図である。本実施の形態においては、船舶情報収集システム2は、無線通信装置21、VDR(Voyage Data Recorder、航海情報記録装置)22、船内作業用PC23及び船舶情報収集装置24等の複数の装置で構成されており、これらの装置が船舶1内に配された船内LAN(Local Area Network)10を介して接続され、相互にデータの送受信を行うことができる。また船内LAN10には、メール送受信用PC11及びPLC(Power Line Communication)モデム12等の他の装置が接続されており、船舶情報収集システム2の各装置は、これらの他の装置との間でデータの送受信を行うこともできる。
【0028】
船舶情報収集システム2の無線通信装置21は、通信衛星7との間で無線信号の送受信を行うための装置である。これにより船舶情報収集システム2は、船舶1が航行中であっても、通信衛星7、地上局6、インターネット網9及び電話回線網8を介して、陸上のサービス提供会社4のサーバ装置40、造船会社5aのPC50及び船舶管理会社5bのPC50との間で無線通信によるデータの送受信を行うことができる。無線通信装置21は、船舶情報収集装置24又はメール送受信用PC11等から与えられた送信データを無線信号に変換して通信衛星7へ送信すると共に、通信衛星7から受信した無線信号をデジタルの受信データに変換して船舶情報収集装置24又はメール送受信用PC11等へ適宜与える。
【0029】
船舶情報収集システム2のVDR22は、海難事故の原因究明を目的として船舶に搭載される装置であり、船舶の航行に係る情報の検出及び記録を行う装置である。VDR22が検出する船舶情報は、船舶1の航行速度、航行位置、舵角、風向、風速及び水深等の情報であり、これらの船舶情報を検出するためにVDR22は各種のセンサを有している。またVDR22が記録する船舶情報には、日時、船首方位、ブリッジ内音声、通信音声、レーダー映像、警報、操舵情報、エンジン情報、扉の開閉状態及び扉の異常等の他の情報が含まれていてもよい。VDR22は、検出したこれらの船舶情報を記録するデータ記録ユニットを有しており、海難事故が発生した場合にはデータ記録ユニットを回収し、記録された情報を解析することにより海難事故の原因究明を行うことができる。またVDR22は、船内LAN10に接続されており、検出した各種の船舶情報を船舶情報収集装置24へ船内LAN10を介して送信する。
【0030】
船舶情報収集システム2の船内作業用PC23は、船舶1の船員が例えば積み付け計算又は航海日誌の記録等の船内作業を行う際に利用するためのものである。船内作業用PC23は、汎用のコンピュータに船内作業のためのソフトウェアをインストールした構成であり、船内LAN10を介したデータ送受信を行うことができる。船内作業用PC23にて船員が行った船内作業の結果は、船内作業用PC23内のハードディスクなどに記録されると共に、船内LAN10を介して船舶情報収集装置24へ送信される。
【0031】
船舶情報収集システム2の船舶情報収集装置24は、大容量のハードディスク又は大容量のメモリディスク等を有したサーバ装置であり、船舶1に係る船舶情報を収集してデータベースとして記録している。船舶情報収集装置24は、船内LAN10を介したデータ送受信を行うことができ、VDR22が検出した各種の船舶情報及び船内作業用PC23にて船員が入力した船舶情報(船内作業の結果)等が船内LAN10を介して与えられ、これらの船舶情報をデータベースに記録する。また船舶情報収集装置24は、船内LAN10とは異なるネットワークであるアークネット14を介して、船舶1の主機15、発電機16及びボイラ17等の船内設備との間でデータ送受信を行うことができ、これらの船内設備から与えられる情報を船舶情報としてデータベースに記録する。また船舶情報収集装置24は、収集して記録した船舶情報を、陸上のサービス提供会社4のサーバ装置40、造船会社5aのPC50又は船舶管理会社5bのPC50等へ、無線通信装置21の無線通信機能を利用して送信することができる。これらの船舶情報収集装置24が行う処理の詳細については後述する。
【0032】
メール送受信用PC11は、主として船舶1の船員が陸上のサービス提供会社4のサーバ装置40、造船会社5aのPC50又は船舶管理会社5bのPC50等との間で電子メールの送受信を行うために用いられるものであり、汎用のコンピュータである。またメール送受信用PC11は、船舶1内に設置された船内作業用PC23又はその他のPCとの間で船内LAN10を介した通信を行うこともできる。更にメール送受信用PC11は、陸上のサービス提供会社4のサーバ装置40、造船会社5aのPC50又は船舶管理会社5bのPC50等から送信された緊急を要する指示などを受信した場合に、受信した指示を船舶1の船員に通知する手段として利用され、このときにメール送受信用PC11は液晶ディスプレイなどに通知メッセージを表示し、スピーカから音声メッセージを出力することで通知を行うことができる。
【0033】
PLCモデム12は、電力線13を介して船舶1に搭載された冷凍コンテナ12a、航海灯12b及びポンプ12c等の船内設備に接続されており、電力線13に重畳された電気信号の授受を行うことによって、これらの船内設備との間で電力線通信によるデータの送受信を行うことができる。またPLCモデム12は、船内LAN10に接続されており、船内LAN10を介した通信と電力線13を介した電力線通信との中継を行う。
【0034】
例えば船内作業用PC23は、PLCモデム12を介して冷凍コンテナ12a、航海灯12b及びポンプ12c等の船内設備との通信を行うことができる。これにより船舶1の船員は、船内作業用PC23を利用して、これらの船内設備の動作制御を行うことができる。船内作業用PC23は、これらの船内設備へ動作指示を送信して所望の動作を行わせることができると共に、これらの船内設備から送信される情報(船内設備の動作状況など)を受信して監視及び記録することができる。船内作業用PC23がPLCモデム12を介して受信したこれらの船内設備からの情報は、船舶情報収集装置24へ与えられてデータベースに記録される。なお、冷凍コンテナ12a、航海灯12b及びポンプ12c等の船内設備の動作制御及び監視等は、船内作業用PC23を用いるのではなく、これらの船内設備を制御するための専用端末などで行ってもよい。
【0035】
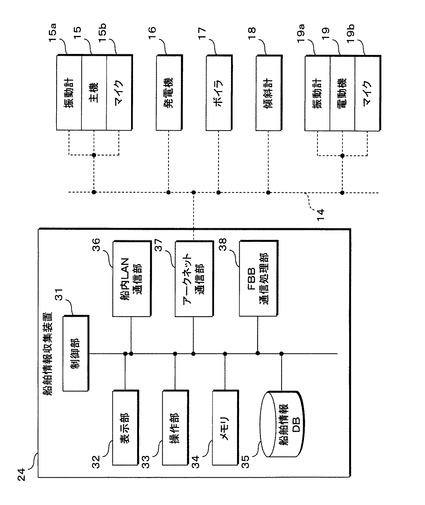
図3は、船舶情報収集装置24の構成を示すブロック図である。船舶情報収集装置24は、制御部31、表示部32、操作部33、メモリ34、船舶情報DB(データベース)35、船内LAN通信部36、アークネット通信部37及びFBB通信処理部38等を備えて構成されている。制御部31は、具体的にはCPU(Central Processing Unit)又はMPU(Micro Processing Unit)等の演算処理装置であり、予め用意されたプログラムを実行することによって、船舶情報収集装置24の動作を制御する。
【0036】
表示部32及び操作部33は、船舶情報収集装置24とこれを利用する船員との間のユーザインタフェースをなすものである。表示部32は、例えば液晶ディスプレイなどであり、船舶情報収集装置24が収集した船舶情報の表示などを行うことができる。操作部33は、マウス及びキーボード等の入力装置であり、船員が船舶情報収集装置24に対して種々の動作指示を与えることができる。ただし、船舶情報収集装置24は表示部32及び操作部33のようなユーザインタフェースを備えていなくてもよく、この場合には例えば船内作業用PC23により船内LAN10を介した遠隔操作によって、船員が船舶情報収集装置24の動作を制御する構成とすることができる。
【0037】
メモリ34は、SRAM(Static Random Access Memory)又はDRAM(Dynamic Random Access Memory)等のデータ書き換え可能な大容量のメモリ素子で構成されるものであり、制御部31の演算過程で生じた一時的なデータの記憶、及び、船内LAN10又はアークネット14を介して送受信するデータの一時的な記憶等に用いることができる。
【0038】
船舶情報DB35は、大容量のハードディスク又は大容量のメモリディスク等に船舶情報を記録蓄積したものである。船舶情報DB35に蓄積される船舶情報は、船内LAN10を介して与えられるVDR22からの船舶情報及び船内作業用PC23からの船舶情報等と、アークネット14を介して与えられる各種の船内設備からの船舶情報とが含まれる。船舶情報収集装置24は、これらの船舶情報を収集して船舶情報DB35に蓄積すると共に、無線通信装置21を利用して船舶情報DB35に蓄積した船舶情報を陸上のサービス提供会社4のサーバ装置40、造船会社5aのPC50又は船舶管理会社5bのPC50等へ送信する処理をFBB通信処理部38にて行う。
【0039】
船内LAN通信部36は、制御部31の制御に応じて、メモリ34から送信データを読み出し、船内LAN10を介してこの送信データを他の装置へ送信すると共に、他の装置から受信した受信データをメモリ34に記憶して制御部31へ通知することにより、船内LAN10を介した他の装置との通信処理を行う。船舶情報収集装置24は、VDR22及び船内作業用PC23等からの船舶情報を船内LAN通信部36にて受信して船舶情報DB35へ蓄積することができ、蓄積した船舶情報をFBB通信処理部38にて無線通信用のデータに変換し、このデータを船内LAN通信部36にて無線通信装置21へ送信することにより、陸上の装置への船舶情報の送信を行うことができる。
【0040】
アークネット通信部37は、アークネット14を介して接続された主機15、振動計15a、マイク15b、発電機16、ボイラ17、傾斜計18、電動機19、振動計19a及びマイク19b等の船内設備との間でのデータ送受信に係る処理を行うものである。アークネット14は、トークンパッシング方式の通信プロトコルを採用したネットワークであり、リアルタイム性を重視したネットワークである。アークネット通信部37は、船内設備から定期的に送信される各種の情報を受信してメモリ34に一時的に記憶しており、船舶情報収集装置24は、アークネット通信部37がメモリ34に記憶した情報を所定のタイミングで船舶情報DB35に蓄積する。
【0041】
図示の例では、船舶1の主機15に振動計15a及びマイク15bが設けられており、主機15の振動を振動計15aが検出して船舶情報収集装置24へアークネット14を介して送信すると共に、主機15が発する音をマイク15bが集音して船舶情報収集装置24へ送信する。また船舶1の適所には傾斜計18が設置されており、船舶1の船体の傾斜を検出して船舶情報収集装置24へアークネット14を介して送信する。また船舶1の電動機19にも振動計19a及びマイク19bが設けられており、振動計19a及びマイク19bは電動機19の振動及び音を検出して船舶情報収集装置24へアークネット14を介して送信する。船舶情報収集装置24は、これらの情報をアークネット通信部37にて受信してメモリ34に記憶した後、船舶情報DB35に船舶情報として蓄積する。
【0042】
FBB通信処理部38は、無線通信装置21及び通信衛星7等を利用した無線通信(衛星通信)に係る処理を行うものであり、船舶情報収集装置24から陸上の装置へ船舶情報を送信する場合に、船舶情報を衛星通信のプロトコルに応じたデータ形式に変換するなどの処理を行う。またFBB通信処理部38は、陸上の装置から船舶情報収集装置24へのデータが無線通信装置21にて受信された場合に、このデータを無線通信装置21から与えられ、与えられたデータを船舶情報収集装置24内の処理に適したデータ形式に変換する処理を行う。
【0043】
図4は、船舶情報収集装置24によるアークネット14を介した船舶情報の収集処理を説明するための模式図である。なお本例では、振動計15aが検出した主機15の振動を船舶情報として蓄積する場合を説明する。振動計15aは一定の周期で主機15の振動を検出し、その検出値を船舶情報収集装置24へアークネット14を介して送信している。船舶情報収集装置24のアークネット通信部37は、受信した振動計15aの検出値をメモリ34に記憶する。ただし、振動計15aの検出値に関してメモリ34に記憶することができるデータ量は、時間T分のデータ量に予め上限が定められている。このため、振動計15aの検出値をメモリ34に記憶する際に、既に記憶されたデータ量が上限値に達している場合、最も古いデータがメモリ34から削除され、その後に新たな検出値がメモリ34に記憶される。即ち、時刻t0に振動計15aの検出値をメモリ34へ記憶した場合、メモリ34には時刻t0から時間T前(時刻t0−T)までの検出値が記憶され、それ以前の検出値は削除される。メモリ34に記憶するデータ量の上限値を規定する時間Tは、例えば数分〜数十分程度の時間を設定することができる。
【0044】
その後、船舶情報収集装置24は、メモリ34に記憶された時間T分の振動計15aの検出値を、所定の周期(例えば1時間など)で船舶情報DB35に蓄積する。また船舶情報収集装置24は、振動計15aの検出値が予め定められた閾値を超えた場合に異常が発生したと判断し、メモリ34に記憶された振動計15aの検出値(及びその他の船舶情報)を船舶情報DB35に蓄積する。なお説明は省略するが、マイク15bが集音した音のデータ、傾斜計18が検出した船体の傾斜の検出値、振動計19aが検出した電動機19の振動の検出値、及びマイク19bが集音した電動機19の音のデータ等についても同様の方法でメモリ34への記憶及び船舶情報DB35への蓄積が行われる。
【0045】
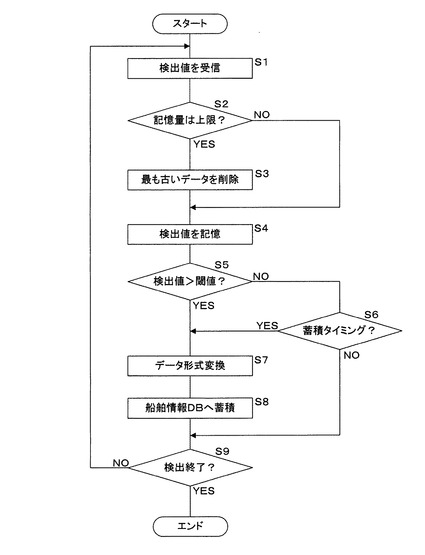
図5は、船舶情報収集装置24が行うアークネット14を介した船舶情報の収集処理の手順を示すフローチャートである。船舶情報収集装置24は、まず、振動計15aから周期的に送信される主機15の振動の検出値をアークネット通信部37にて受信する(ステップS1)。次いで、船舶情報収集装置24は、振動の検出値に関してメモリ34に記憶できる記憶量の上限に、現時点でメモリ34に記憶された検出値の記憶量が達しているか否かを判定し(ステップS2)、記憶量が上限に達している場合(S2:YES)、メモリ34に記憶された最も古いデータを削除して(ステップS3)、ステップS1にて受信した検出値をメモリ34に記憶する(ステップS4)。また、記憶量が上限に達していない場合(S2:NO)、船舶情報収集装置24は、メモリ34のデータを削除することなく、ステップS1にて受信した検出値をメモリ34に記憶する(ステップS4)。
【0046】
また船舶情報収集装置24は、ステップS1にて受信した検出値が、予め定められた閾値を超えるか否かを判定し(ステップS5)、検出値が閾値を超えない場合(S5:NO)、検出値の船舶情報DB35への蓄積タイミングに達したか否かを判定する(ステップS6)。検出値が閾値を超える場合(S5:YES)、又は、船舶情報DB35への蓄積タイミングに達した場合(S6:YES)、船舶情報収集装置24は、メモリ34に記憶された時間T分の検出値を、データベースとして予め定められたデータ形式に変換し(ステップS7)、データ形式を変換した後の検出値を船舶情報DB35へ蓄積し(ステップS8)、ステップS9へ処理を進める。検出値が閾値を超えず(S5:NO)、且つ、蓄積タイミングに達していない場合(S6:NO)、船舶情報収集装置24は、検出値の船舶情報DB35への蓄積を行わずに、ステップS9へ処理を進める。
【0047】
次いで、船舶情報収集装置24は、船舶1が港に停泊して主機15が停止されるなどの要因により、振動計15aによる振動の検出が終了されたか否かを判定し(ステップS9)、検出が終了されていない場合には(S9:NO)、ステップS1へ処理を戻し、上述の処理を繰り返し行って振動の検出及び検出値の蓄積を行う。振動計15aによる検出が終了された場合(S9:YES)、船舶情報収集装置24は、処理を終了する。
【0048】
船舶情報収集装置24は、メモリ34に記憶された検出値を船舶情報DB35へ蓄積する際に、予め定められたデータ形式に検出値を変換した後で蓄積を行う(図5に示すフローチャートのステップS7参照)。これにより、船舶情報DB35に蓄積した船舶情報の検索を効率よく行うことが可能となり、船舶情報収集装置24は必要な船舶情報を効率よく検索して送信することができる。
【0049】
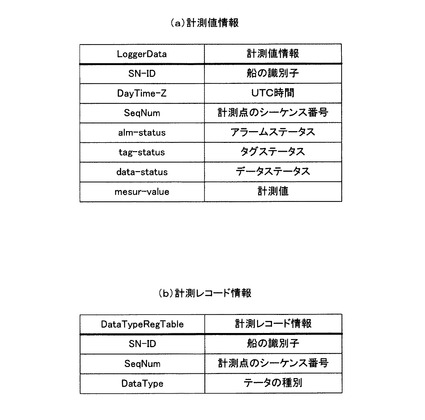
図6及び図7は、船舶情報DB35に蓄積される船舶情報の一構成例を示す模式図であり、アークネット14を介して収集された船舶情報を蓄積する場合のデータ形式を示してある。メモリ34に記憶された検出値(図6及び図7において計測値)は、図6(a)に示す計測値情報に変換されて船舶情報DB35に蓄積される。計測値情報は、船舶1に付された識別子(SN-ID)、計測値を計測したUTC時間(DayTime-Z)、計測点(振動計15a、マイク15b及び傾斜計18等の計測が行われる点)に付されたシーケンス番号(SeqNum)、アラームステータス(alm-status)、タグステータス(tag-status)、データステータス(data-status)及び計測値(mesur-value)等の項目で構成されており、メモリ34から読み出したデータを計測値(mesur-value)としてその他の情報を付与したものである。
【0050】
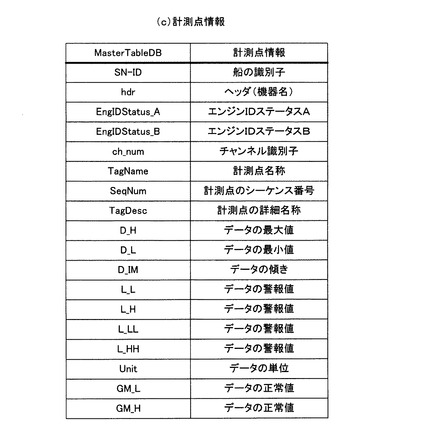
また船舶情報DB35には、上記の計測値情報の他に、各計測値のデータ種別に係る情報が図6(b)に示す計測レコード情報として蓄積され、各計測点に係る情報が図7に示す計測点情報として蓄積されている。計測レコード情報は、船舶1に付された識別子(SN-ID)、計測点に付されたシーケンス番号(SeqNum)及びこの計測点に係るデータの種別(DataType)等の項目で構成されている。また計測点情報は、船舶1に付された識別子(SN-ID)、計測点の機器名を示すヘッダ(hdr)、エンジンIDステータス(EngIDStatus_A、EngIDStatus_B)、チャンネル識別子(ch_num)、計測点の名称(TagName)、計測点に付されたシーケンス番号(SeqNum)、計測点の詳細名称(TagDesc)、データの最大値(D_H)、最小値(D_L)、傾き(D_IM)、異常判定の閾値となるデータの警報値(L_L、L_H、L_LL、L_HH)、データの単位(Unit)、データの正常値(GM_L、GM_H)等等の項目で構成されている。
【0051】
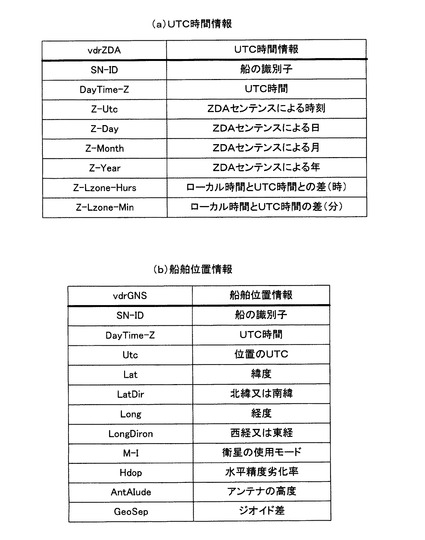
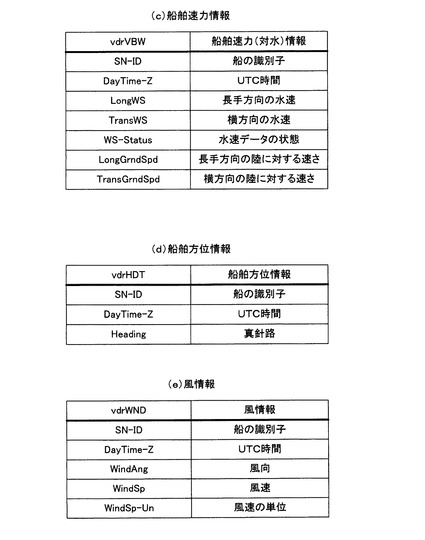
また、船舶情報収集装置24は、VDR22から与えられた船舶情報についても同様に、予め定められたデータ形式に船舶情報を変換した後で船舶情報DB35へ蓄積する(ただしデータ形式の変換は船舶情報収集装置24が行ってもよく、VDR22が行ってもよい)。図8及び図9は、船舶情報DB35に蓄積される船舶情報の一構成例を示す模式図であり、VDR22から与えられた船舶情報を蓄積する場合のデータ形式を示してある。VDR22から船舶情報収集装置24へ与えられる船舶情報には、例えばUTC時間情報(図8(a)参照)、船舶位置情報(図8(b)参照)、船舶速力情報(図9(c)参照)、船舶方位情報(図9(d)参照)及び風情報(図9(e)参照)等の情報が含まれている。
【0052】
UTC時間情報は、例えばGPS(Global Positioning System)の受信情報(ZDAセンテンス)に基づく時間の情報であり、船舶情報収集システム2はこのUTC時間情報を用いて船舶情報の検出時刻及び蓄積時刻等を決定する。UTC時間情報は、船舶1に付された識別子(SN-ID)、年月日及び時刻を含むUTC時間(DayTime-Z)、ZDAセンテンスによる時刻(Z-Utc)、ZDAセンテンスによる日(Z-Day)、ZDAセンテンスによる月(Z-Month)、ZDAセンテンスによる年(Z-Year)、並びにローカル時間とUTC時間との差(Z-Lzone-Hurs、Z-Lzone-Min)等の項目で構成されている。
【0053】
船舶位置情報は、GPSの機能により算出された船舶1の航行位置に係る情報である。船舶位置情報は、船舶1に付された識別子(SN-ID)、船舶位置を測定したUTC時間(DayTime-Z)、船舶位置のUTC(Utc)、緯度(Lat)、北緯又は南緯(LatDir)、経度(Long)、西経又は東経(LongDiron)、GPS衛星の使用モード(M-I)、水平精度劣化率(Hdop)、GPSアンテナの高度(AntAlude)及びジオイド差(GeoSep)等の項目で構成されている。
【0054】
船舶速力情報は、海水などの流れに対する船舶1の相対的な航行速度(水速)に係る情報である。船舶速力情報は、船舶1に付された識別子(SN-ID)、船舶の航行速度を測定したUTC時間(DayTime-Z)、船舶1の長手方向に係る航行速度(LongWS)、船舶1の横方向に係る航行速度(TransWS)、水速データの状態(WS-Status)、長手方向の陸に対する航行速度(LongGrndSpd)及び横方向の陸に対する航行速度(TransGrndSpd)等の項目で構成されている。
【0055】
船舶方位情報は、船舶1が航行する方位に係る情報である。船舶方位情報は、船舶1に付された識別子(SN-ID)、船舶の方位を測定したUTC時間(DayTime-Z)及び船舶の航行方位である真針路(Heading)等の項目で構成されている。また風情報は、船舶1の周囲の風に係る情報である。風情報は、船舶1に付された識別子(SN-ID)、風を測定したUTC時間(DayTime-Z)、風向(WindAng)、風速(WindSp)及び風速の単位(WindSp-Un)等の項目で構成されている。
【0056】
また、船舶情報収集装置24は、船内作業用PC23から与えられた船舶情報についても同様に、予め定められたデータ形式に船舶情報を変換した後で船舶情報DB35へ蓄積する(ただしデータ形式の変換は船舶情報収集装置24が行ってもよく、船内作業用PC23が行ってもよい)。図10は、船舶情報DB35に蓄積される船舶情報の一構成例を示す模式図であり、船内作業用PC23から与えられた船舶情報を蓄積する場合のデータ形式を示してある。船内作業用PC23から船舶情報収集装置24へ与えられる船舶情報には、例えば図10に示すような航海情報が含まれる。
【0057】
航海情報は、船舶1の航海に係る情報であり、船内作業用PC23を用いて船員が入力した情報である。航海情報には、船舶1に付された識別子(SN-ID)、船員が入力するのではなく船内作業用PC23が自動的に航海情報に対して付す識別子(A-ID)、船員が入力する航海番号(V-Num)、暫定出発日時(DraftDep)、出発日時(DepTime)、到着日時(ArrTime)、通過開始時刻(SOP)、通過終了時刻(EOP)、出発港(DepPort)及び到着港(ArrPort)等の項目で構成されている。
【0058】
VDR22は、各種のセンサを用いて船舶1の航行速度及び風速等の種々の船舶情報を定期的に検出して蓄積しており、蓄積した船舶情報を定期的に船内LAN10を介して船舶情報収集装置24へ送信している。また船内作業用PC23は、船員による船内作業が行われた際に、船舶情報の入力が確定した場合に、船内LAN10を介して船舶情報を船舶情報収集装置24へ送信している。船舶情報収集装置24は、VDR22又は船内作業用PC23から送信された船内情報を船内LAN通信部36にて受信した場合、受信した船舶情報を船舶情報DB35に蓄積する処理を行う。
【0059】
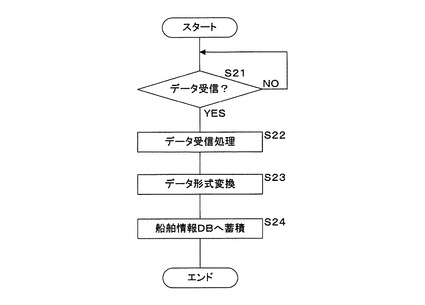
図11は、船舶情報収集装置24が行う船内LAN10を介した船舶情報の収集処理の手順を示すフローチャートである。船舶情報収集装置24は、まず、船内LAN通信部36にてVDR22又は船内作業用PC23からの船舶情報に係るデータを受信したか否かを判定し(ステップS21)、データを受信していない場合には(S21:NO)、データを受信するまで待機する。データを受信した場合(S21:YES)、船舶情報収集装置24は、船内LAN通信部36によるデータ受信処理を行った後(ステップS22)、受信した船舶情報を図8〜図10に示したような所定のデータ形式に変換し(ステップS23)、変換後の船舶情報を船舶情報DB35へ蓄積して(ステップS24)、処理を終了する。
【0060】
船舶情報収集装置24は、上述のようにVDR22、船内作業用PC23及び船舶情報収集装置24にて各種の船舶情報の検出又は入力受付を行い、船舶情報を所定のデータ形式に変換した後で船舶情報DB35へ蓄積する処理を行っている。また船舶情報収集装置24は、船舶情報DB35に蓄積した船舶情報を、下記の4つのタイミングで陸上への送信を行っている。
(1)定期的な船舶情報の送信
(2)異常発生時の船舶情報の送信
(3)船員の指示に基づく船舶情報の送信
(4)陸上からの要求に基づく船舶情報の送信
【0061】
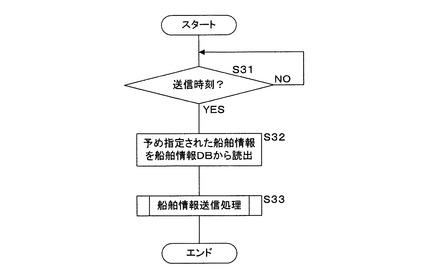
船舶情報収集装置24は、予め設定された時刻(例えば毎日の午前0時など)に、予め定められた送信先(例えばサービス提供会社4のサーバ装置40)へ、予め指定された船舶情報を送信する定期送信機能を有している。図12は、船舶情報収集装置24による船舶情報の定期送信処理の手順を示すフローチャートである。船舶情報収集装置24は、予め設定された送信時刻に達したか否かを判定し(ステップS31)、送信時刻に達していない場合には(S31:NO)、送信時刻に達するまで待機する。船舶情報の送信時刻に達した場合(S31:YES)、船舶情報収集装置24は、予め指定された船舶情報を船舶情報DB35から読み出し(ステップS32)、読み出した船舶情報をFBB通信処理部38へ与えて船舶情報送信処理を行い(ステップS33)、処理を終了する。
【0062】
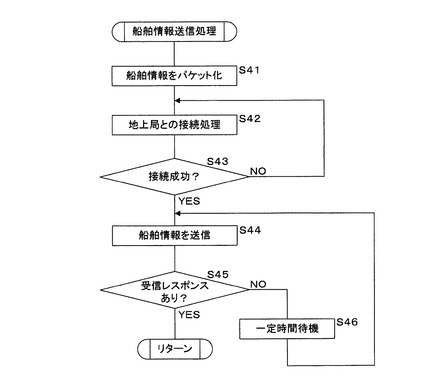
図13は、船舶情報収集装置24による船舶情報送信処理の手順を示すフローチャートであり、図12に示したフローチャートのステップS33にて行われる処理である。船舶情報収集装置24のFBB通信処理部38は、まず、与えられた船舶情報を衛星通信のプロトコルに応じてパケット化する(ステップS41)。次いで、船舶情報収集装置24のFBB通信処理部38は、無線通信装置21にて通信衛星7を介した地上局6との通信接続を試みる処理を行い(ステップS42)、地上局6との接続に成功したか否かを判定する(ステップS43)。地上局6との接続に失敗した場合(S43:NO)、船舶情報収集装置24のFBB通信処理部38は、ステップS42へ処理を戻して接続処理を再度行う。
【0063】
地上局6との接続に成功した場合(S43:YES)、船舶情報収集装置24のFBB通信処理部38は、ステップS41にてパケット化した船舶情報を無線通信装置21へ与え、通信衛星7及び地上局6を介して、予め定められた送信先へ送信する(ステップS44)。その後、船舶情報収集装置24のFBB通信処理部38は、地上局6又は船舶情報の送信先から船舶情報の受信を完了した旨の応答(受信レスポンス)を無線通信装置21にて受信したか否かを判定し(ステップS45)、受信レスポンスを受信していない場合には(S45:NO)、一定時間待機した後(ステップS46)、ステップS44へ処理を戻し、船舶情報の再送信を行う。受信レスポンスを受信した場合(S45:YES)、船舶情報収集装置24のFBB通信処理部38は、船舶情報送信処理を終了する。
【0064】
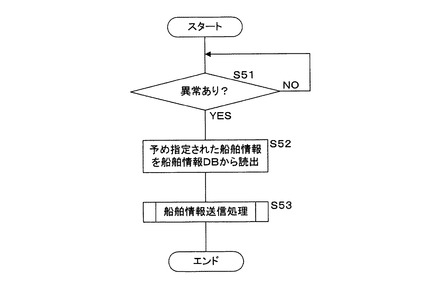
また、船舶情報収集装置24は、上述のように例えば振動計15aが検出する振動が閾値を超えた場合などに異常が発生したと判断することができ、船舶1にて異常が発生した場合には、予め定められた送信先へ、予め指定された船舶情報を送信する異常時送信機能を有している。図14は、船舶情報収集装置24による船舶情報の異常時送信処理の手順を示すフローチャートである。船舶情報収集装置24は、検出した各種の船舶情報(又はVDR22から与えられた各種の船舶情報)の値が閾値を超えたか否かに応じて、船舶1に異常が生じたか否かを判定し(ステップS51)、異常が生じていない場合には(S51:NO)、異常が生じるまで待機する。
【0065】
船舶1に異常が生じていると判定した場合(S51:YES)、船舶情報収集装置24は、異常発生時に送信する船舶情報として予め指定された船舶情報を船舶情報DB35から読み出し(ステップS52)、読み出した船舶情報をFBB通信処理部38へ与えて船舶情報送信処理を行い(ステップS53)、処理を終了する。なおステップS53の船舶情報送信処理は、図13に示した処理と同じ処理であるため、説明は省略する。
【0066】
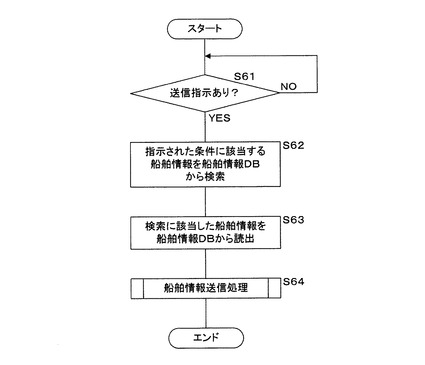
また、船舶情報収集装置24は、船舶1の船員による船舶情報の送信指示が与えられた場合に、送信指示と共に与えられる条件に該当する船舶情報を検索し、船員により指定された送信先へ船舶情報を送信する指示送信機能を有している。図15は、船舶情報収集装置24による船舶情報の指示送信処理の手順を示すフローチャートである。船舶情報収集装置24は、操作部33からの入力又は船内作業用PC23からの遠隔操作により、船舶情報の送信指示を受け付けたか否かを判定し(ステップS61)、送信指示を受け付けていない場合には(S61:NO)、送信指示を受け付けるまで待機する。
【0067】
船舶情報の送信指示には、送信する船舶情報の種別などの条件及び送信先の指定などが含まれており、船舶情報収集装置24は、送信指示を受け付けた場合(S61:YES)、指定された条件に該当する船舶情報を船舶情報DB35から検索する(ステップS62)。このとき指定する検索条件は、例えば船舶情報に付されたUTC時間(DayTime-Z)に対して、xx月yy日zz時〜XX月YY日ZZ時のように期間を指定することができ、また例えば計測点のシーケンス番号(SeqNum)に対して数値を指定することができる。船舶情報収集装置24は、指定された条件での検索に該当した船舶情報の全てを船舶情報DB35から読み出し(ステップS63)、読み出した船舶情報をFBB通信処理部38へ与えて船舶情報送信処理を行い(ステップS64)、処理を終了する。なおステップS64の船舶情報送信処理は、図13に示した処理と同じ処理であるため、説明は省略する。
【0068】
また、船舶情報収集装置24は、陸上のサービス提供会社4に設置されたサーバ装置40、造船会社5aに設置されたPC50及び船舶管理会社5bのPC50等の陸上の装置から、地上局6及び通信衛星7を介して与えられた船舶情報の送信要求に対して、要求された船舶情報を送信する応答送信機能を有している。サーバ装置40又はPC50を使用する船舶管理者又は船舶設計者等の陸上ユーザは、船舶情報の送信を要求する場合に、送信する船舶情報の条件を指定することができる。このときに指定する条件は、例えば船舶情報に付されたUTC時間(DayTime-Z)に対して期間を指定することができ、また例えば計測点のシーケンス番号(SeqNum)に対して数値を指定することができる。更には、航海番号(V-Num)を指定することもでき、この場合には船舶情報収集装置24は、船舶情報DB35から該当する航海情報(図10参照)を検索し、この航海情報に含まれる出発日時(DepTime)及び到着日時(ArrTime)等に対応する船舶情報を更に船舶情報DB35から検索して、陸上の装置へ送信する。このように、送信要求の際の条件の指定は、種々の方法で行うことができる。
【0069】
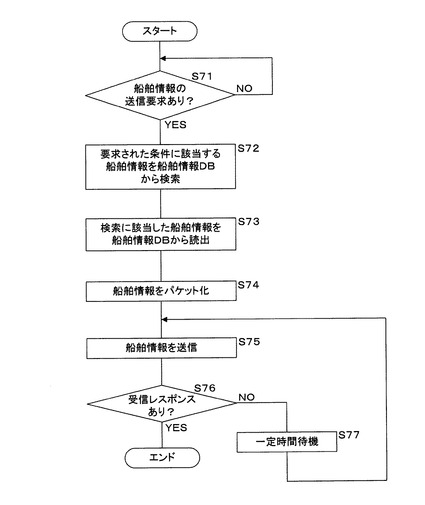
図16は、船舶情報収集装置24による船舶情報の応答送信処理の手順を示すフローチャートである。船舶情報収集装置24は、FBB通信処理部38にて、通信衛星7及び地上局6を介して、陸上のサービス提供会社4に設置されたサーバ装置40、造船会社5aに設置されたPC50又は船舶管理会社5bに設置されたPC50等からの送信要求を無線通信装置21が受信したか否かを判定し(ステップS71)、送信要求を受信していない場合には(S71:NO)、送信要求を受信するまで待機する。
【0070】
送信要求を受信した場合(S71:YES)、船舶情報収集装置24は、要求された条件に該当する船舶情報を船舶情報DB35から検索し(ステップS72)、この条件での検索に該当した船舶情報の全てを船舶情報DB35から読み出し(ステップS73)、読み出した船舶情報をFBB通信処理部38へ与える。
【0071】
船舶情報を与えられたFBB通信処理部38は、与えられた船舶情報を、衛星通信のプロトコルに応じてパケット化し(ステップS74)、パケット化した船舶情報を無線通信装置21へ与え、通信衛星7及び地上局6を介して、送信要求の送信元へ送信する(ステップS75)。その後、船舶情報収集装置24は、FBB通信処理部38にて、船舶情報の送信先から送信される受信レスポンスを受信したか否かを判定し(ステップS76)、受信レスポンスを受信していない場合には(S76:NO)、一定時間待機した後(ステップS77)、ステップS75へ処理を戻し、船舶情報の再送信を行う。受信レスポンスを受信した場合(S76:YES)、船舶情報収集装置24は処理を終了する。
【0072】
以上の構成の船舶情報収集装置24においては、VDR22が検出した船舶1の航行速度及び風速等の船舶情報と、アークネット通信部37にアークネット14を介して接続された振動計15a、マイク15b、傾斜計18、振動計19a及びマイク19b等が検出した船舶情報とを、所定のデータ形式で船舶情報DB35に蓄積し、陸上の装置から送信要求が与えられた場合に、送信要求に含まれる条件に応じて船舶情報DB35から船舶情報を検索し、条件に該当する船舶情報を陸上の装置へ送信する構成とすることにより、陸上の装置を利用する船舶1に管理者又は設計者等は、必要なときに必要な船舶情報を取得することができる。
【0073】
また、船内作業用PC23にて船員が入力した種々の情報を船舶情報として船舶情報収集装置24の船舶情報DB35に蓄積する構成とすることにより、船舶1の積み付け計算又は航海日誌等のデータを船舶情報として蓄積することができる。また、船舶1の船員により送信指示が与えられた場合に、船舶情報収集装置24が船舶情報DB35に蓄積した船舶情報の送信を行う構成とすることにより、船員が船舶1の管理又は船舶設計等に有用であると判断した船舶情報などを確実に陸上の装置へ送信することができる。
【0074】
また、VDR22、振動計15a、マイク15b、傾斜計18、振動計19a及びマイク19b等により検出された船舶情報には、検出日時に係るUTC時間(DayTime-Z)を付して船舶情報DB35に蓄積する構成とすることにより、陸上の装置から船舶情報の送信要求を与える場合及び船舶1の船員が送信指示を与える場合等に、船舶情報収集装置24に対して送信する船舶情報の日時を指定することができる。
【0075】
また、振動計15a及びマイク15bを用いて主機15などの船内設備の振動及び音を検出し、振動計19a及びマイク19bを用いて電動機19などの船内設備の振動及び音を検出し、これらを船舶情報として船舶情報DB35に蓄積する構成とすることにより、蓄積された振動及び音の船舶情報を解析することによって船内設備の摩耗度及び疲労度等を推測し、故障を予測して早めの部品交換又はメンテナンス等を行うことができ、船内設備が故障した際には故障の原因を分析することができる。また、傾斜計18を用いて船舶1の船体の傾斜を検出し、船舶情報として船舶情報DB35に蓄積する構成とすることにより、海難事故の発生時などに事故原因の推測を行うことができる。
【0076】
また、船舶情報収集装置24は、予め定められた周期で船舶情報の蓄積を定期的に行うと共に、検出した種々の船舶情報から船舶1の異常を検知した場合に船舶情報の蓄積を行う構成とすることにより、船舶1に異常が発生したとき又は海難事故が発生したとき等の船舶情報を蓄積することができ、これらの原因究明に役立てることができる。また、船舶情報収集装置24は、振動計15a、マイク15b、傾斜計18、振動計19a及びマイク19bの検出値をメモリ34に所定時間分記憶し、船舶情報DB35への蓄積タイミングに達した場合にメモリ34に記憶した検出値を船舶情報として船舶情報DB35に蓄積する構成とすることにより、船舶1に異常が発生した場合などに、異常発生から所定時間前までの船舶情報を船舶情報DB35に蓄積することができ、異常発生の原因究明などをより確実に行うことができる。
【0077】
なお、本実施の形態においては、船舶情報収集システム2が無線通信装置21、VDR22、船内作業用PC23及び船舶情報収集装置24の4つの装置で構成されるものとしたが、これに限るものではなく、これら4つの装置の機能全てを備えた1つの船舶情報収集装置として構成してもよく、2つ、3つ又は5つ以上の複数の装置にて船舶情報収集システムを構成してもよい。また、船舶情報収集装置24が振動計15a、マイク15b、傾斜計18、振動計19a及びマイク19b等の検出値を受信してメモリ34に記憶する構成としたが、これに限るものではなく、船舶情報収集装置2は船舶情報の収集のみを行う構成とし、振動計15a、マイク15b及び傾斜計18等の検出値の受信などを別の装置で行う構成としてもよい。また、図6〜図10に示した船舶情報のデータ形式及び船舶情報の種類等は、一例であって、これらに限るものではなく、船舶情報収集装置24が収集する船舶情報はその他の種々の情報であってよい。
【符号の説明】
【0078】
1 船舶
2 船舶情報収集システム
4 サービス提供会社
5a 造船会社
5b 船舶管理会社
6 地上局
7 通信衛星
8 電話回線網
9 インターネット網
10 船内LAN
11 メール送受信用PC
12 PLCモデム
13 電力線
14 アークネット
15 主機
15a 振動計(船舶情報検出手段)
15b マイク(船舶情報検出手段)
16 発電機
17 ボイラ
18 傾斜計(船舶情報検出手段)
19 電動機
19a 振動計(船舶情報検出手段)
19b マイク(船舶情報検出手段)
21 無線通信装置(無線通信手段)
22 VDR(船舶情報検出手段)
23 船内作業用PC(情報受付手段、指示受付手段)
24 船舶情報収集装置(定期送信手段、要求受信手段、情報検索手段、応答送信手段、指示送信手段、異常検知手段)
31 制御部
32 表示部
33 操作部(指示受付手段)
34 メモリ(記憶手段)
35 船舶情報DB(情報蓄積手段)
36 船内LAN通信部
37 アークネット通信部
38 FBB通信処理部(定期送信手段、要求受信手段、応答送信手段、指示送信手段)
40 サーバ装置
50 PC
【技術分野】
【0001】
本発明は、船舶の航行中に得られる情報を収集すると共に、収集した情報を陸上の装置へ送信する船舶情報収集装置に関する。
【背景技術】
【0002】
船舶の航行中に得られる情報、例えば船舶の航行速度、航行方位及び航行位置等の船舶航行に係る情報、船舶周辺の風向、風速及び天候等の船舶の航行環境に係る情報、並びに、船舶のエンジンの出力及び燃費等の船舶設備に係る情報等は、船舶の保守管理、船舶の故障などの異常発見、船舶の航行管理及び船舶の設計等に有用な情報である。このため従来は、船舶の航行中にこれらの船舶情報を収集しておき、船舶が港などに停泊した際に、収集した船舶情報を可搬型の記録媒体などに記録して陸上の作業者へ受け渡すなどの方法により、収集した船舶情報を船舶の保守管理及び設計等に用いていた。
【0003】
また、特許文献1においては、船舶に設置されているパーソナルコンピュータが通信衛星及び衛星基地局を介して船舶情報を船舶情報仲介装置へ送信し、船舶情報仲介装置が受信した船舶情報を各船舶の管理会社毎に定められた書式に編集し、編集した船舶情報を管理会社に設置されているパーソナルコンピュータへ送信する構成とすることにより、船舶から送信される船舶情報に書式情報が含まれない仕様として、船舶情報を安価に送信することができる船舶情報仲介システム及び船舶情報仲介装置が提案されている。
【0004】
特許文献1に記載の船舶情報仲介システムのように、船舶に設置されたコンピュータが通信衛星及び衛星基地局を介して陸上の装置へ無線送信する構成とすることによって、船舶が港などに停泊した際に船舶情報を記録媒体などに記録して授受する方法と比較して、船舶情報のフィードバックをより早期に行うことができる。ただし、通信衛星などを利用した無線通信は通信コストが高いという問題があるため、特許文献1に記載の船舶情報仲介システムは送受信する情報量を低減することで通信コストを抑制している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2001−283145号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら近年においては、通信技術の進歩に伴って、通信衛星などを介した船舶の通信装置と陸上の通信装置との通信が高速化され、大量のデータを短時間に送受信することが可能となってきており、上述のような通信コストに係る問題が解消されてきている。
【0007】
また、船舶の航行が長期間に亘る場合、航行中に収集される船舶情報の量は膨大である。通信技術の進歩に伴って、船舶の通信装置から陸上の通信装置へ大量の船舶情報を送信することが可能となったとしても、膨大な船舶情報から船舶の保守管理及び設計等に有用な情報を取得することは容易ではない。
【0008】
本発明は、斯かる事情に鑑みてなされたものであって、その目的とするところは、船舶の航行に伴って種々の船舶情報を収集し、陸上の通信装置との間で船舶情報の授受を行うことができると共に、収集された膨大な量の船舶情報から船舶の保守管理及び設計等に有用な情報を的確に授受することができる船舶情報収集装置を提供することにある。
【課題を解決するための手段】
【0009】
本発明に係る船舶情報収集装置は、船舶に搭載され、該船舶の航行に係る情報又は該船舶内の設備に係る情報を検出する船舶情報検出手段と、前記船舶情報検出手段が検出した情報を所定のデータ形式に変換して蓄積する情報蓄積手段と、陸上に設置された装置との間で情報の送受信を行う無線通信手段と、前記情報蓄積手段に蓄積した情報を、前記無線通信手段により陸上の装置へ定期的に送信する定期送信手段と、陸上の装置からの情報送信要求を前記無線通信手段により受信する要求受信手段と、前記情報蓄積手段が蓄積した情報から、前記要求受信手段が受信した情報送信要求に含まれる送信条件に応じた情報を検索する情報検索手段と、該情報検索手段が検索した情報を、前記無線通信手段により陸上の装置へ送信する応答送信手段とを備えることを特徴とする。
【0010】
また、本発明に係る船舶情報収集装置は、情報の入力を受け付ける情報受付手段と、情報の送信指示を受け付ける指示受付手段と、該指示受付手段が情報の送信指示を受け付けた場合に、前記情報蓄積手段に蓄積した情報を、前記無線通信手段により陸上の装置へ送信する指示送信手段とを更に備え、前記情報蓄積手段は、前記情報受付手段が受け付けた情報を所定のデータ形式に変換して蓄積するようにしてあることを特徴とする。
【0011】
また、本発明に係る船舶情報収集装置は、前記情報蓄積手段が、蓄積する情報を所定のデータ形式に変換する際に、日付及び時刻に係る情報を前記情報検索手段による検索用情報として含むデータ形式に変換するようにしてあることを特徴とする。
【0012】
また、本発明に係る船舶情報収集装置は、前記日付及び時刻に係る情報は、UTC(Coordinated Universal Time、協定世界時)に基づく日付及び時刻であることを特徴とする。
【0013】
また、本発明に係る船舶情報収集装置は、前記船舶情報検出手段が検出する情報には、前記船舶内の設備の振動に係る情報、前記船舶内の設備が発する音に係る情報、又は、前記船舶の傾斜に係る情報を含むことを特徴とする。
【0014】
また、本発明に係る船舶情報収集装置は、前記船舶情報検出手段が検出した情報に応じて、前記船舶の異常を検知する異常検知手段を備え、前記情報蓄積手段は、前記船舶情報検出手段が検出した情報の蓄積を定期的に行うと共に、前記異常検知手段が異常を検知した場合に前記船舶情報検出手段が検出した情報を蓄積するようにしてあることを特徴とする。
【0015】
また、本発明に係る船舶情報収集装置は、前記船舶情報検出手段が検出した情報を、現時点から所定時間前まで記憶する記憶手段を備え、前記情報蓄積手段は、所定の蓄積タイミングにて前記記憶手段から情報を読み出して蓄積するようにしてあることを特徴とする。
【0016】
本発明においては、船舶の航行速度、航行方位、風向及び風速等のように船舶の航行に係る情報、並びに船舶のエンジンの出力及び燃費等の船舶設備に係る情報等を検出し、これらの種々の情報(以下、単に船舶情報という)を所定のデータ形式に変換して蓄積する。これにより、船舶情報のデータベースを船舶に設けることができる。船舶情報収集装置には、通信衛星などを介した無線通信により陸上の装置との間でデータの送受信を行う手段を設け、データベースに蓄積した船舶情報を定期的に陸上の装置へ送信する。
また本発明の船舶情報収集装置は、蓄積した船舶情報の送信要求を、陸上の装置から無線通信により受信して受け付けることができる。この送信要求には、送信する船舶情報の条件を含めることができ、船舶情報収集装置は受信した送信要求に含まれる送信条件に応じて、データベースに蓄積した多くの船舶情報から所望の船舶情報を検索して抽出し、この船舶情報を無線通信により陸上の装置へ送信する。これにより船舶の管理者又は設計者等は、陸上の装置を用いて、必要な船舶情報のみを必要なときに船舶情報収集装置から取得することができる。
【0017】
また、本発明においては、積み付け計算又は航海日誌のように、船舶の船員が入力する情報を受け付けて、受け付けた船舶情報を所定のデータ形式に変換して蓄積する。このように、より多くの情報を船舶情報収集装置が一元的に蓄積することによって、船舶情報の管理及び陸上の装置への送信等を効率よく行うことができる。
また船員が入力した送信指示を受け付けて、蓄積した船舶情報の送信を送信指示に応じて行うことによって、船員が有用と判断した船舶情報を陸上の装置へ送信することができる。
【0018】
また、本発明においては、日付及び時刻の条件を指定して船舶情報の検索を行うことができるように、蓄積する日付及び時刻に係る情報を検索用情報として含めたデータ形式に船舶情報を変換してデータベースへの蓄積を行う。これにより、陸上の装置から日付及び時刻を指定して船舶情報の送信要求を船舶情報収集装置へ与えることができ、所望の日付及び時刻の船舶情報のみを取得することができる。なお、船舶の航行は広範囲に亘って行われる可能性があるため、UTCに基づく日付及び時刻を用いることが好ましい。
【0019】
また、本発明においては、船舶のエンジンなどの設備が発する振動若しくは音、又は船舶の船体の傾斜に係る情報を検出して船舶情報としてデータベースに蓄積する。振動の検出は例えば振動計を用いて行うことができ、音の検出は例えばマイクを用いて行うことができ、また船体の傾斜の検出は例えば傾斜計を用いて行うことができる。
例えば船舶のエンジンが発する振動又は音を検出することにより、エンジンに異常が生じているか否かを判断することができ、エンジンの保守管理にこれらの情報を用いることができる。また例えば船体の傾斜を検出することにより、風向及び波高等の他の情報と共に船体の傾斜を調べることで、船舶の性能評価などを行うことができる。また、これらの船舶情報に基づいて、船舶に異常が発生しているか否かを判断することもできる。
【0020】
また、本発明においては、検出した船舶情報に応じて船舶の異常を検知する。例えば船舶のエンジンが発する振動若しくは音が閾値を超えた場合、又は船舶の傾斜が閾値を超えた場合等に船舶の異常を検知する構成とすることができる。
船舶情報蓄積装置は、船舶情報の蓄積を予め定められた周期(例えば10分毎又は1時間毎等)で定期的に行うと共に、船舶の異常を検知した場合に船舶情報の蓄積を行う。これにより、船舶に異常が発生したときの前後の船舶情報を蓄積しておくことができ、異常発生の原因究明などに役立てることができる。
【0021】
また、本発明においては、船舶情報の検出を所定の周期(ただし、船舶情報の蓄積周期より短い周期)で行い、検出した船舶情報をメモリなどの記憶手段に一時的に記憶しておく。記憶手段には、検出した船舶情報を上書きしながら記憶していき、最新の検出を行った時点(現時点)から所定時間前までの船舶情報を記憶しておく。船舶情報の定期的な蓄積又は異常発生時の蓄積等のように、検出した船舶情報を蓄積するタイミングに達した場合には、記憶手段に記憶した所定時間分の船舶情報を読み出して蓄積する。
これにより、船舶情報の蓄積を所定時間分毎に行うことができる。また異常発生時などには、異常発生から所定時間前までの船舶情報を蓄積することができるため、異常発生の原因究明などをより確実に行うことが可能となる。
【発明の効果】
【0022】
本発明による場合は、検出した船舶情報を船舶情報収集装置がデータベースとして蓄積しておき、陸上の装置からの送信要求に応じて必要な船舶情報を船舶情報収集装置が検索して送信する構成とすることにより、陸上の船舶管理者又は船舶設計者等が必要な情報を確実に取得することができる。また船舶情報収集装置は、定期的な船舶情報の送信及び船員の指示による船舶情報の送信等を行うこともできるため、陸上の装置は船舶情報の使用目的などに適したいずれかの方法により、船舶からの船舶情報を受信することができる。よって、船舶情報収集装置と陸上の装置との間で船舶情報の送受信を効率よく行うことができ、収集された膨大な船舶情報から必要な情報を陸上の装置にて得ることができるため、船舶情報を用いた船舶の保守管理、運行管理及び船舶設計等をより効率的に行うことができる。
【図面の簡単な説明】
【0023】
【図1】船舶と陸上の装置との通信を説明するための模式図である。
【図2】船舶に搭載された船舶情報収集システムの構成を示すブロック図である。
【図3】船舶情報収集装置の構成を示すブロック図である。
【図4】船舶情報収集装置によるアークネットを介した船舶情報の収集処理を説明するための模式図である。
【図5】船舶情報収集装置が行うアークネットを介した船舶情報の収集処理の手順を示すフローチャートである。
【図6】船舶情報DBに蓄積される船舶情報の一構成例を示す模式図である。
【図7】船舶情報DBに蓄積される船舶情報の一構成例を示す模式図である。
【図8】船舶情報DBに蓄積される船舶情報の一構成例を示す模式図である。
【図9】船舶情報DBに蓄積される船舶情報の一構成例を示す模式図である。
【図10】船舶情報DBに蓄積される船舶情報の一構成例を示す模式図である。
【図11】船舶情報収集装置が行う船内LANを介した船舶情報の収集処理の手順を示すフローチャートである。
【図12】船舶情報収集装置による船舶情報の定期送信処理の手順を示すフローチャートである。
【図13】船舶情報収集装置による船舶情報送信処理の手順を示すフローチャートである。
【図14】船舶情報収集装置による船舶情報の異常時送信処理の手順を示すフローチャートである。
【図15】船舶情報収集装置による船舶情報の指示送信処理の手順を示すフローチャートである。
【図16】船舶情報収集装置による船舶情報の応答送信処理の手順を示すフローチャートである。
【発明を実施するための形態】
【0024】
以下、本発明をその実施の形態を示す図面に基づき具体的に説明する。図1は、船舶と陸上の装置との通信を説明するための模式図である。図において1は船舶であり、海洋を航行して貨物の運搬などを行う。船舶1には、航行速度、航行方向及び航行位置等の船舶航行に係る情報、船舶1周辺の風向、風速及び天候等の航行環境に係る情報、並びに、船舶1のエンジンの出力及び燃費等の船舶設備に係る情報等を検出して収集する船舶情報収集システム2(図2にて図示する)が搭載されている。
【0025】
船舶1に搭載された船舶情報収集システム2は、通信衛星7を利用した無線通信を行う機能を有しており、陸上のサービス提供会社4に設置されたサーバ装置40、造船会社5aに設置されたPC(Personal Computer)50又は船舶管理会社5bに設置されたPC50等との間で無線通信によるデータの送受信を行うことができる。通信衛星7は、例えばFBB(Fleet Broad-Band)用の通信衛星であり、船舶1に搭載された船舶情報収集システム2と、陸上に設けられた地上局6との間での無線信号の中継を行うことができる。地上局6は、インターネット網9及び電話回線網8等を介して、サービス提供会社4に設置されたサーバ装置40、造船会社5aに設置されたPC50及び船舶管理会社5bに設置されたPC50等との間で、データの送受信を行うことができる。よって船舶1に搭載された船舶情報収集システム2は、通信衛星7及び地上局6を介して、サーバ装置40及びPC50等との通信を行うことができる。
【0026】
サービス提供会社4のサーバ装置40、造船会社5aのPC50及び船舶管理会社5bのPC50は、インターネット網9又は電話回線網8のいずれを利用しても地上局8との通信を行うことができる。いずれの通信網を利用して通信を行うかは、通信速度及び送受信するデータ量等を考慮して適宜に選択すればよい。例えば、船舶1の船舶情報収集システム2から大容量のデータを受信する場合にはインターネット網9を利用し、船舶情報収集システム2へ小容量のデータを送信する場合には電話回線網8を利用するなどの構成とすることができる。なお、サーバ装置40及びPC50は、インターネット網9及び電話回線網8のいずれか一方のみを利用して通信を行う構成であってもよい。
【0027】
図2は、船舶1に搭載された船舶情報収集システム2の構成を示すブロック図である。本実施の形態においては、船舶情報収集システム2は、無線通信装置21、VDR(Voyage Data Recorder、航海情報記録装置)22、船内作業用PC23及び船舶情報収集装置24等の複数の装置で構成されており、これらの装置が船舶1内に配された船内LAN(Local Area Network)10を介して接続され、相互にデータの送受信を行うことができる。また船内LAN10には、メール送受信用PC11及びPLC(Power Line Communication)モデム12等の他の装置が接続されており、船舶情報収集システム2の各装置は、これらの他の装置との間でデータの送受信を行うこともできる。
【0028】
船舶情報収集システム2の無線通信装置21は、通信衛星7との間で無線信号の送受信を行うための装置である。これにより船舶情報収集システム2は、船舶1が航行中であっても、通信衛星7、地上局6、インターネット網9及び電話回線網8を介して、陸上のサービス提供会社4のサーバ装置40、造船会社5aのPC50及び船舶管理会社5bのPC50との間で無線通信によるデータの送受信を行うことができる。無線通信装置21は、船舶情報収集装置24又はメール送受信用PC11等から与えられた送信データを無線信号に変換して通信衛星7へ送信すると共に、通信衛星7から受信した無線信号をデジタルの受信データに変換して船舶情報収集装置24又はメール送受信用PC11等へ適宜与える。
【0029】
船舶情報収集システム2のVDR22は、海難事故の原因究明を目的として船舶に搭載される装置であり、船舶の航行に係る情報の検出及び記録を行う装置である。VDR22が検出する船舶情報は、船舶1の航行速度、航行位置、舵角、風向、風速及び水深等の情報であり、これらの船舶情報を検出するためにVDR22は各種のセンサを有している。またVDR22が記録する船舶情報には、日時、船首方位、ブリッジ内音声、通信音声、レーダー映像、警報、操舵情報、エンジン情報、扉の開閉状態及び扉の異常等の他の情報が含まれていてもよい。VDR22は、検出したこれらの船舶情報を記録するデータ記録ユニットを有しており、海難事故が発生した場合にはデータ記録ユニットを回収し、記録された情報を解析することにより海難事故の原因究明を行うことができる。またVDR22は、船内LAN10に接続されており、検出した各種の船舶情報を船舶情報収集装置24へ船内LAN10を介して送信する。
【0030】
船舶情報収集システム2の船内作業用PC23は、船舶1の船員が例えば積み付け計算又は航海日誌の記録等の船内作業を行う際に利用するためのものである。船内作業用PC23は、汎用のコンピュータに船内作業のためのソフトウェアをインストールした構成であり、船内LAN10を介したデータ送受信を行うことができる。船内作業用PC23にて船員が行った船内作業の結果は、船内作業用PC23内のハードディスクなどに記録されると共に、船内LAN10を介して船舶情報収集装置24へ送信される。
【0031】
船舶情報収集システム2の船舶情報収集装置24は、大容量のハードディスク又は大容量のメモリディスク等を有したサーバ装置であり、船舶1に係る船舶情報を収集してデータベースとして記録している。船舶情報収集装置24は、船内LAN10を介したデータ送受信を行うことができ、VDR22が検出した各種の船舶情報及び船内作業用PC23にて船員が入力した船舶情報(船内作業の結果)等が船内LAN10を介して与えられ、これらの船舶情報をデータベースに記録する。また船舶情報収集装置24は、船内LAN10とは異なるネットワークであるアークネット14を介して、船舶1の主機15、発電機16及びボイラ17等の船内設備との間でデータ送受信を行うことができ、これらの船内設備から与えられる情報を船舶情報としてデータベースに記録する。また船舶情報収集装置24は、収集して記録した船舶情報を、陸上のサービス提供会社4のサーバ装置40、造船会社5aのPC50又は船舶管理会社5bのPC50等へ、無線通信装置21の無線通信機能を利用して送信することができる。これらの船舶情報収集装置24が行う処理の詳細については後述する。
【0032】
メール送受信用PC11は、主として船舶1の船員が陸上のサービス提供会社4のサーバ装置40、造船会社5aのPC50又は船舶管理会社5bのPC50等との間で電子メールの送受信を行うために用いられるものであり、汎用のコンピュータである。またメール送受信用PC11は、船舶1内に設置された船内作業用PC23又はその他のPCとの間で船内LAN10を介した通信を行うこともできる。更にメール送受信用PC11は、陸上のサービス提供会社4のサーバ装置40、造船会社5aのPC50又は船舶管理会社5bのPC50等から送信された緊急を要する指示などを受信した場合に、受信した指示を船舶1の船員に通知する手段として利用され、このときにメール送受信用PC11は液晶ディスプレイなどに通知メッセージを表示し、スピーカから音声メッセージを出力することで通知を行うことができる。
【0033】
PLCモデム12は、電力線13を介して船舶1に搭載された冷凍コンテナ12a、航海灯12b及びポンプ12c等の船内設備に接続されており、電力線13に重畳された電気信号の授受を行うことによって、これらの船内設備との間で電力線通信によるデータの送受信を行うことができる。またPLCモデム12は、船内LAN10に接続されており、船内LAN10を介した通信と電力線13を介した電力線通信との中継を行う。
【0034】
例えば船内作業用PC23は、PLCモデム12を介して冷凍コンテナ12a、航海灯12b及びポンプ12c等の船内設備との通信を行うことができる。これにより船舶1の船員は、船内作業用PC23を利用して、これらの船内設備の動作制御を行うことができる。船内作業用PC23は、これらの船内設備へ動作指示を送信して所望の動作を行わせることができると共に、これらの船内設備から送信される情報(船内設備の動作状況など)を受信して監視及び記録することができる。船内作業用PC23がPLCモデム12を介して受信したこれらの船内設備からの情報は、船舶情報収集装置24へ与えられてデータベースに記録される。なお、冷凍コンテナ12a、航海灯12b及びポンプ12c等の船内設備の動作制御及び監視等は、船内作業用PC23を用いるのではなく、これらの船内設備を制御するための専用端末などで行ってもよい。
【0035】
図3は、船舶情報収集装置24の構成を示すブロック図である。船舶情報収集装置24は、制御部31、表示部32、操作部33、メモリ34、船舶情報DB(データベース)35、船内LAN通信部36、アークネット通信部37及びFBB通信処理部38等を備えて構成されている。制御部31は、具体的にはCPU(Central Processing Unit)又はMPU(Micro Processing Unit)等の演算処理装置であり、予め用意されたプログラムを実行することによって、船舶情報収集装置24の動作を制御する。
【0036】
表示部32及び操作部33は、船舶情報収集装置24とこれを利用する船員との間のユーザインタフェースをなすものである。表示部32は、例えば液晶ディスプレイなどであり、船舶情報収集装置24が収集した船舶情報の表示などを行うことができる。操作部33は、マウス及びキーボード等の入力装置であり、船員が船舶情報収集装置24に対して種々の動作指示を与えることができる。ただし、船舶情報収集装置24は表示部32及び操作部33のようなユーザインタフェースを備えていなくてもよく、この場合には例えば船内作業用PC23により船内LAN10を介した遠隔操作によって、船員が船舶情報収集装置24の動作を制御する構成とすることができる。
【0037】
メモリ34は、SRAM(Static Random Access Memory)又はDRAM(Dynamic Random Access Memory)等のデータ書き換え可能な大容量のメモリ素子で構成されるものであり、制御部31の演算過程で生じた一時的なデータの記憶、及び、船内LAN10又はアークネット14を介して送受信するデータの一時的な記憶等に用いることができる。
【0038】
船舶情報DB35は、大容量のハードディスク又は大容量のメモリディスク等に船舶情報を記録蓄積したものである。船舶情報DB35に蓄積される船舶情報は、船内LAN10を介して与えられるVDR22からの船舶情報及び船内作業用PC23からの船舶情報等と、アークネット14を介して与えられる各種の船内設備からの船舶情報とが含まれる。船舶情報収集装置24は、これらの船舶情報を収集して船舶情報DB35に蓄積すると共に、無線通信装置21を利用して船舶情報DB35に蓄積した船舶情報を陸上のサービス提供会社4のサーバ装置40、造船会社5aのPC50又は船舶管理会社5bのPC50等へ送信する処理をFBB通信処理部38にて行う。
【0039】
船内LAN通信部36は、制御部31の制御に応じて、メモリ34から送信データを読み出し、船内LAN10を介してこの送信データを他の装置へ送信すると共に、他の装置から受信した受信データをメモリ34に記憶して制御部31へ通知することにより、船内LAN10を介した他の装置との通信処理を行う。船舶情報収集装置24は、VDR22及び船内作業用PC23等からの船舶情報を船内LAN通信部36にて受信して船舶情報DB35へ蓄積することができ、蓄積した船舶情報をFBB通信処理部38にて無線通信用のデータに変換し、このデータを船内LAN通信部36にて無線通信装置21へ送信することにより、陸上の装置への船舶情報の送信を行うことができる。
【0040】
アークネット通信部37は、アークネット14を介して接続された主機15、振動計15a、マイク15b、発電機16、ボイラ17、傾斜計18、電動機19、振動計19a及びマイク19b等の船内設備との間でのデータ送受信に係る処理を行うものである。アークネット14は、トークンパッシング方式の通信プロトコルを採用したネットワークであり、リアルタイム性を重視したネットワークである。アークネット通信部37は、船内設備から定期的に送信される各種の情報を受信してメモリ34に一時的に記憶しており、船舶情報収集装置24は、アークネット通信部37がメモリ34に記憶した情報を所定のタイミングで船舶情報DB35に蓄積する。
【0041】
図示の例では、船舶1の主機15に振動計15a及びマイク15bが設けられており、主機15の振動を振動計15aが検出して船舶情報収集装置24へアークネット14を介して送信すると共に、主機15が発する音をマイク15bが集音して船舶情報収集装置24へ送信する。また船舶1の適所には傾斜計18が設置されており、船舶1の船体の傾斜を検出して船舶情報収集装置24へアークネット14を介して送信する。また船舶1の電動機19にも振動計19a及びマイク19bが設けられており、振動計19a及びマイク19bは電動機19の振動及び音を検出して船舶情報収集装置24へアークネット14を介して送信する。船舶情報収集装置24は、これらの情報をアークネット通信部37にて受信してメモリ34に記憶した後、船舶情報DB35に船舶情報として蓄積する。
【0042】
FBB通信処理部38は、無線通信装置21及び通信衛星7等を利用した無線通信(衛星通信)に係る処理を行うものであり、船舶情報収集装置24から陸上の装置へ船舶情報を送信する場合に、船舶情報を衛星通信のプロトコルに応じたデータ形式に変換するなどの処理を行う。またFBB通信処理部38は、陸上の装置から船舶情報収集装置24へのデータが無線通信装置21にて受信された場合に、このデータを無線通信装置21から与えられ、与えられたデータを船舶情報収集装置24内の処理に適したデータ形式に変換する処理を行う。
【0043】
図4は、船舶情報収集装置24によるアークネット14を介した船舶情報の収集処理を説明するための模式図である。なお本例では、振動計15aが検出した主機15の振動を船舶情報として蓄積する場合を説明する。振動計15aは一定の周期で主機15の振動を検出し、その検出値を船舶情報収集装置24へアークネット14を介して送信している。船舶情報収集装置24のアークネット通信部37は、受信した振動計15aの検出値をメモリ34に記憶する。ただし、振動計15aの検出値に関してメモリ34に記憶することができるデータ量は、時間T分のデータ量に予め上限が定められている。このため、振動計15aの検出値をメモリ34に記憶する際に、既に記憶されたデータ量が上限値に達している場合、最も古いデータがメモリ34から削除され、その後に新たな検出値がメモリ34に記憶される。即ち、時刻t0に振動計15aの検出値をメモリ34へ記憶した場合、メモリ34には時刻t0から時間T前(時刻t0−T)までの検出値が記憶され、それ以前の検出値は削除される。メモリ34に記憶するデータ量の上限値を規定する時間Tは、例えば数分〜数十分程度の時間を設定することができる。
【0044】
その後、船舶情報収集装置24は、メモリ34に記憶された時間T分の振動計15aの検出値を、所定の周期(例えば1時間など)で船舶情報DB35に蓄積する。また船舶情報収集装置24は、振動計15aの検出値が予め定められた閾値を超えた場合に異常が発生したと判断し、メモリ34に記憶された振動計15aの検出値(及びその他の船舶情報)を船舶情報DB35に蓄積する。なお説明は省略するが、マイク15bが集音した音のデータ、傾斜計18が検出した船体の傾斜の検出値、振動計19aが検出した電動機19の振動の検出値、及びマイク19bが集音した電動機19の音のデータ等についても同様の方法でメモリ34への記憶及び船舶情報DB35への蓄積が行われる。
【0045】
図5は、船舶情報収集装置24が行うアークネット14を介した船舶情報の収集処理の手順を示すフローチャートである。船舶情報収集装置24は、まず、振動計15aから周期的に送信される主機15の振動の検出値をアークネット通信部37にて受信する(ステップS1)。次いで、船舶情報収集装置24は、振動の検出値に関してメモリ34に記憶できる記憶量の上限に、現時点でメモリ34に記憶された検出値の記憶量が達しているか否かを判定し(ステップS2)、記憶量が上限に達している場合(S2:YES)、メモリ34に記憶された最も古いデータを削除して(ステップS3)、ステップS1にて受信した検出値をメモリ34に記憶する(ステップS4)。また、記憶量が上限に達していない場合(S2:NO)、船舶情報収集装置24は、メモリ34のデータを削除することなく、ステップS1にて受信した検出値をメモリ34に記憶する(ステップS4)。
【0046】
また船舶情報収集装置24は、ステップS1にて受信した検出値が、予め定められた閾値を超えるか否かを判定し(ステップS5)、検出値が閾値を超えない場合(S5:NO)、検出値の船舶情報DB35への蓄積タイミングに達したか否かを判定する(ステップS6)。検出値が閾値を超える場合(S5:YES)、又は、船舶情報DB35への蓄積タイミングに達した場合(S6:YES)、船舶情報収集装置24は、メモリ34に記憶された時間T分の検出値を、データベースとして予め定められたデータ形式に変換し(ステップS7)、データ形式を変換した後の検出値を船舶情報DB35へ蓄積し(ステップS8)、ステップS9へ処理を進める。検出値が閾値を超えず(S5:NO)、且つ、蓄積タイミングに達していない場合(S6:NO)、船舶情報収集装置24は、検出値の船舶情報DB35への蓄積を行わずに、ステップS9へ処理を進める。
【0047】
次いで、船舶情報収集装置24は、船舶1が港に停泊して主機15が停止されるなどの要因により、振動計15aによる振動の検出が終了されたか否かを判定し(ステップS9)、検出が終了されていない場合には(S9:NO)、ステップS1へ処理を戻し、上述の処理を繰り返し行って振動の検出及び検出値の蓄積を行う。振動計15aによる検出が終了された場合(S9:YES)、船舶情報収集装置24は、処理を終了する。
【0048】
船舶情報収集装置24は、メモリ34に記憶された検出値を船舶情報DB35へ蓄積する際に、予め定められたデータ形式に検出値を変換した後で蓄積を行う(図5に示すフローチャートのステップS7参照)。これにより、船舶情報DB35に蓄積した船舶情報の検索を効率よく行うことが可能となり、船舶情報収集装置24は必要な船舶情報を効率よく検索して送信することができる。
【0049】
図6及び図7は、船舶情報DB35に蓄積される船舶情報の一構成例を示す模式図であり、アークネット14を介して収集された船舶情報を蓄積する場合のデータ形式を示してある。メモリ34に記憶された検出値(図6及び図7において計測値)は、図6(a)に示す計測値情報に変換されて船舶情報DB35に蓄積される。計測値情報は、船舶1に付された識別子(SN-ID)、計測値を計測したUTC時間(DayTime-Z)、計測点(振動計15a、マイク15b及び傾斜計18等の計測が行われる点)に付されたシーケンス番号(SeqNum)、アラームステータス(alm-status)、タグステータス(tag-status)、データステータス(data-status)及び計測値(mesur-value)等の項目で構成されており、メモリ34から読み出したデータを計測値(mesur-value)としてその他の情報を付与したものである。
【0050】
また船舶情報DB35には、上記の計測値情報の他に、各計測値のデータ種別に係る情報が図6(b)に示す計測レコード情報として蓄積され、各計測点に係る情報が図7に示す計測点情報として蓄積されている。計測レコード情報は、船舶1に付された識別子(SN-ID)、計測点に付されたシーケンス番号(SeqNum)及びこの計測点に係るデータの種別(DataType)等の項目で構成されている。また計測点情報は、船舶1に付された識別子(SN-ID)、計測点の機器名を示すヘッダ(hdr)、エンジンIDステータス(EngIDStatus_A、EngIDStatus_B)、チャンネル識別子(ch_num)、計測点の名称(TagName)、計測点に付されたシーケンス番号(SeqNum)、計測点の詳細名称(TagDesc)、データの最大値(D_H)、最小値(D_L)、傾き(D_IM)、異常判定の閾値となるデータの警報値(L_L、L_H、L_LL、L_HH)、データの単位(Unit)、データの正常値(GM_L、GM_H)等等の項目で構成されている。
【0051】
また、船舶情報収集装置24は、VDR22から与えられた船舶情報についても同様に、予め定められたデータ形式に船舶情報を変換した後で船舶情報DB35へ蓄積する(ただしデータ形式の変換は船舶情報収集装置24が行ってもよく、VDR22が行ってもよい)。図8及び図9は、船舶情報DB35に蓄積される船舶情報の一構成例を示す模式図であり、VDR22から与えられた船舶情報を蓄積する場合のデータ形式を示してある。VDR22から船舶情報収集装置24へ与えられる船舶情報には、例えばUTC時間情報(図8(a)参照)、船舶位置情報(図8(b)参照)、船舶速力情報(図9(c)参照)、船舶方位情報(図9(d)参照)及び風情報(図9(e)参照)等の情報が含まれている。
【0052】
UTC時間情報は、例えばGPS(Global Positioning System)の受信情報(ZDAセンテンス)に基づく時間の情報であり、船舶情報収集システム2はこのUTC時間情報を用いて船舶情報の検出時刻及び蓄積時刻等を決定する。UTC時間情報は、船舶1に付された識別子(SN-ID)、年月日及び時刻を含むUTC時間(DayTime-Z)、ZDAセンテンスによる時刻(Z-Utc)、ZDAセンテンスによる日(Z-Day)、ZDAセンテンスによる月(Z-Month)、ZDAセンテンスによる年(Z-Year)、並びにローカル時間とUTC時間との差(Z-Lzone-Hurs、Z-Lzone-Min)等の項目で構成されている。
【0053】
船舶位置情報は、GPSの機能により算出された船舶1の航行位置に係る情報である。船舶位置情報は、船舶1に付された識別子(SN-ID)、船舶位置を測定したUTC時間(DayTime-Z)、船舶位置のUTC(Utc)、緯度(Lat)、北緯又は南緯(LatDir)、経度(Long)、西経又は東経(LongDiron)、GPS衛星の使用モード(M-I)、水平精度劣化率(Hdop)、GPSアンテナの高度(AntAlude)及びジオイド差(GeoSep)等の項目で構成されている。
【0054】
船舶速力情報は、海水などの流れに対する船舶1の相対的な航行速度(水速)に係る情報である。船舶速力情報は、船舶1に付された識別子(SN-ID)、船舶の航行速度を測定したUTC時間(DayTime-Z)、船舶1の長手方向に係る航行速度(LongWS)、船舶1の横方向に係る航行速度(TransWS)、水速データの状態(WS-Status)、長手方向の陸に対する航行速度(LongGrndSpd)及び横方向の陸に対する航行速度(TransGrndSpd)等の項目で構成されている。
【0055】
船舶方位情報は、船舶1が航行する方位に係る情報である。船舶方位情報は、船舶1に付された識別子(SN-ID)、船舶の方位を測定したUTC時間(DayTime-Z)及び船舶の航行方位である真針路(Heading)等の項目で構成されている。また風情報は、船舶1の周囲の風に係る情報である。風情報は、船舶1に付された識別子(SN-ID)、風を測定したUTC時間(DayTime-Z)、風向(WindAng)、風速(WindSp)及び風速の単位(WindSp-Un)等の項目で構成されている。
【0056】
また、船舶情報収集装置24は、船内作業用PC23から与えられた船舶情報についても同様に、予め定められたデータ形式に船舶情報を変換した後で船舶情報DB35へ蓄積する(ただしデータ形式の変換は船舶情報収集装置24が行ってもよく、船内作業用PC23が行ってもよい)。図10は、船舶情報DB35に蓄積される船舶情報の一構成例を示す模式図であり、船内作業用PC23から与えられた船舶情報を蓄積する場合のデータ形式を示してある。船内作業用PC23から船舶情報収集装置24へ与えられる船舶情報には、例えば図10に示すような航海情報が含まれる。
【0057】
航海情報は、船舶1の航海に係る情報であり、船内作業用PC23を用いて船員が入力した情報である。航海情報には、船舶1に付された識別子(SN-ID)、船員が入力するのではなく船内作業用PC23が自動的に航海情報に対して付す識別子(A-ID)、船員が入力する航海番号(V-Num)、暫定出発日時(DraftDep)、出発日時(DepTime)、到着日時(ArrTime)、通過開始時刻(SOP)、通過終了時刻(EOP)、出発港(DepPort)及び到着港(ArrPort)等の項目で構成されている。
【0058】
VDR22は、各種のセンサを用いて船舶1の航行速度及び風速等の種々の船舶情報を定期的に検出して蓄積しており、蓄積した船舶情報を定期的に船内LAN10を介して船舶情報収集装置24へ送信している。また船内作業用PC23は、船員による船内作業が行われた際に、船舶情報の入力が確定した場合に、船内LAN10を介して船舶情報を船舶情報収集装置24へ送信している。船舶情報収集装置24は、VDR22又は船内作業用PC23から送信された船内情報を船内LAN通信部36にて受信した場合、受信した船舶情報を船舶情報DB35に蓄積する処理を行う。
【0059】
図11は、船舶情報収集装置24が行う船内LAN10を介した船舶情報の収集処理の手順を示すフローチャートである。船舶情報収集装置24は、まず、船内LAN通信部36にてVDR22又は船内作業用PC23からの船舶情報に係るデータを受信したか否かを判定し(ステップS21)、データを受信していない場合には(S21:NO)、データを受信するまで待機する。データを受信した場合(S21:YES)、船舶情報収集装置24は、船内LAN通信部36によるデータ受信処理を行った後(ステップS22)、受信した船舶情報を図8〜図10に示したような所定のデータ形式に変換し(ステップS23)、変換後の船舶情報を船舶情報DB35へ蓄積して(ステップS24)、処理を終了する。
【0060】
船舶情報収集装置24は、上述のようにVDR22、船内作業用PC23及び船舶情報収集装置24にて各種の船舶情報の検出又は入力受付を行い、船舶情報を所定のデータ形式に変換した後で船舶情報DB35へ蓄積する処理を行っている。また船舶情報収集装置24は、船舶情報DB35に蓄積した船舶情報を、下記の4つのタイミングで陸上への送信を行っている。
(1)定期的な船舶情報の送信
(2)異常発生時の船舶情報の送信
(3)船員の指示に基づく船舶情報の送信
(4)陸上からの要求に基づく船舶情報の送信
【0061】
船舶情報収集装置24は、予め設定された時刻(例えば毎日の午前0時など)に、予め定められた送信先(例えばサービス提供会社4のサーバ装置40)へ、予め指定された船舶情報を送信する定期送信機能を有している。図12は、船舶情報収集装置24による船舶情報の定期送信処理の手順を示すフローチャートである。船舶情報収集装置24は、予め設定された送信時刻に達したか否かを判定し(ステップS31)、送信時刻に達していない場合には(S31:NO)、送信時刻に達するまで待機する。船舶情報の送信時刻に達した場合(S31:YES)、船舶情報収集装置24は、予め指定された船舶情報を船舶情報DB35から読み出し(ステップS32)、読み出した船舶情報をFBB通信処理部38へ与えて船舶情報送信処理を行い(ステップS33)、処理を終了する。
【0062】
図13は、船舶情報収集装置24による船舶情報送信処理の手順を示すフローチャートであり、図12に示したフローチャートのステップS33にて行われる処理である。船舶情報収集装置24のFBB通信処理部38は、まず、与えられた船舶情報を衛星通信のプロトコルに応じてパケット化する(ステップS41)。次いで、船舶情報収集装置24のFBB通信処理部38は、無線通信装置21にて通信衛星7を介した地上局6との通信接続を試みる処理を行い(ステップS42)、地上局6との接続に成功したか否かを判定する(ステップS43)。地上局6との接続に失敗した場合(S43:NO)、船舶情報収集装置24のFBB通信処理部38は、ステップS42へ処理を戻して接続処理を再度行う。
【0063】
地上局6との接続に成功した場合(S43:YES)、船舶情報収集装置24のFBB通信処理部38は、ステップS41にてパケット化した船舶情報を無線通信装置21へ与え、通信衛星7及び地上局6を介して、予め定められた送信先へ送信する(ステップS44)。その後、船舶情報収集装置24のFBB通信処理部38は、地上局6又は船舶情報の送信先から船舶情報の受信を完了した旨の応答(受信レスポンス)を無線通信装置21にて受信したか否かを判定し(ステップS45)、受信レスポンスを受信していない場合には(S45:NO)、一定時間待機した後(ステップS46)、ステップS44へ処理を戻し、船舶情報の再送信を行う。受信レスポンスを受信した場合(S45:YES)、船舶情報収集装置24のFBB通信処理部38は、船舶情報送信処理を終了する。
【0064】
また、船舶情報収集装置24は、上述のように例えば振動計15aが検出する振動が閾値を超えた場合などに異常が発生したと判断することができ、船舶1にて異常が発生した場合には、予め定められた送信先へ、予め指定された船舶情報を送信する異常時送信機能を有している。図14は、船舶情報収集装置24による船舶情報の異常時送信処理の手順を示すフローチャートである。船舶情報収集装置24は、検出した各種の船舶情報(又はVDR22から与えられた各種の船舶情報)の値が閾値を超えたか否かに応じて、船舶1に異常が生じたか否かを判定し(ステップS51)、異常が生じていない場合には(S51:NO)、異常が生じるまで待機する。
【0065】
船舶1に異常が生じていると判定した場合(S51:YES)、船舶情報収集装置24は、異常発生時に送信する船舶情報として予め指定された船舶情報を船舶情報DB35から読み出し(ステップS52)、読み出した船舶情報をFBB通信処理部38へ与えて船舶情報送信処理を行い(ステップS53)、処理を終了する。なおステップS53の船舶情報送信処理は、図13に示した処理と同じ処理であるため、説明は省略する。
【0066】
また、船舶情報収集装置24は、船舶1の船員による船舶情報の送信指示が与えられた場合に、送信指示と共に与えられる条件に該当する船舶情報を検索し、船員により指定された送信先へ船舶情報を送信する指示送信機能を有している。図15は、船舶情報収集装置24による船舶情報の指示送信処理の手順を示すフローチャートである。船舶情報収集装置24は、操作部33からの入力又は船内作業用PC23からの遠隔操作により、船舶情報の送信指示を受け付けたか否かを判定し(ステップS61)、送信指示を受け付けていない場合には(S61:NO)、送信指示を受け付けるまで待機する。
【0067】
船舶情報の送信指示には、送信する船舶情報の種別などの条件及び送信先の指定などが含まれており、船舶情報収集装置24は、送信指示を受け付けた場合(S61:YES)、指定された条件に該当する船舶情報を船舶情報DB35から検索する(ステップS62)。このとき指定する検索条件は、例えば船舶情報に付されたUTC時間(DayTime-Z)に対して、xx月yy日zz時〜XX月YY日ZZ時のように期間を指定することができ、また例えば計測点のシーケンス番号(SeqNum)に対して数値を指定することができる。船舶情報収集装置24は、指定された条件での検索に該当した船舶情報の全てを船舶情報DB35から読み出し(ステップS63)、読み出した船舶情報をFBB通信処理部38へ与えて船舶情報送信処理を行い(ステップS64)、処理を終了する。なおステップS64の船舶情報送信処理は、図13に示した処理と同じ処理であるため、説明は省略する。
【0068】
また、船舶情報収集装置24は、陸上のサービス提供会社4に設置されたサーバ装置40、造船会社5aに設置されたPC50及び船舶管理会社5bのPC50等の陸上の装置から、地上局6及び通信衛星7を介して与えられた船舶情報の送信要求に対して、要求された船舶情報を送信する応答送信機能を有している。サーバ装置40又はPC50を使用する船舶管理者又は船舶設計者等の陸上ユーザは、船舶情報の送信を要求する場合に、送信する船舶情報の条件を指定することができる。このときに指定する条件は、例えば船舶情報に付されたUTC時間(DayTime-Z)に対して期間を指定することができ、また例えば計測点のシーケンス番号(SeqNum)に対して数値を指定することができる。更には、航海番号(V-Num)を指定することもでき、この場合には船舶情報収集装置24は、船舶情報DB35から該当する航海情報(図10参照)を検索し、この航海情報に含まれる出発日時(DepTime)及び到着日時(ArrTime)等に対応する船舶情報を更に船舶情報DB35から検索して、陸上の装置へ送信する。このように、送信要求の際の条件の指定は、種々の方法で行うことができる。
【0069】
図16は、船舶情報収集装置24による船舶情報の応答送信処理の手順を示すフローチャートである。船舶情報収集装置24は、FBB通信処理部38にて、通信衛星7及び地上局6を介して、陸上のサービス提供会社4に設置されたサーバ装置40、造船会社5aに設置されたPC50又は船舶管理会社5bに設置されたPC50等からの送信要求を無線通信装置21が受信したか否かを判定し(ステップS71)、送信要求を受信していない場合には(S71:NO)、送信要求を受信するまで待機する。
【0070】
送信要求を受信した場合(S71:YES)、船舶情報収集装置24は、要求された条件に該当する船舶情報を船舶情報DB35から検索し(ステップS72)、この条件での検索に該当した船舶情報の全てを船舶情報DB35から読み出し(ステップS73)、読み出した船舶情報をFBB通信処理部38へ与える。
【0071】
船舶情報を与えられたFBB通信処理部38は、与えられた船舶情報を、衛星通信のプロトコルに応じてパケット化し(ステップS74)、パケット化した船舶情報を無線通信装置21へ与え、通信衛星7及び地上局6を介して、送信要求の送信元へ送信する(ステップS75)。その後、船舶情報収集装置24は、FBB通信処理部38にて、船舶情報の送信先から送信される受信レスポンスを受信したか否かを判定し(ステップS76)、受信レスポンスを受信していない場合には(S76:NO)、一定時間待機した後(ステップS77)、ステップS75へ処理を戻し、船舶情報の再送信を行う。受信レスポンスを受信した場合(S76:YES)、船舶情報収集装置24は処理を終了する。
【0072】
以上の構成の船舶情報収集装置24においては、VDR22が検出した船舶1の航行速度及び風速等の船舶情報と、アークネット通信部37にアークネット14を介して接続された振動計15a、マイク15b、傾斜計18、振動計19a及びマイク19b等が検出した船舶情報とを、所定のデータ形式で船舶情報DB35に蓄積し、陸上の装置から送信要求が与えられた場合に、送信要求に含まれる条件に応じて船舶情報DB35から船舶情報を検索し、条件に該当する船舶情報を陸上の装置へ送信する構成とすることにより、陸上の装置を利用する船舶1に管理者又は設計者等は、必要なときに必要な船舶情報を取得することができる。
【0073】
また、船内作業用PC23にて船員が入力した種々の情報を船舶情報として船舶情報収集装置24の船舶情報DB35に蓄積する構成とすることにより、船舶1の積み付け計算又は航海日誌等のデータを船舶情報として蓄積することができる。また、船舶1の船員により送信指示が与えられた場合に、船舶情報収集装置24が船舶情報DB35に蓄積した船舶情報の送信を行う構成とすることにより、船員が船舶1の管理又は船舶設計等に有用であると判断した船舶情報などを確実に陸上の装置へ送信することができる。
【0074】
また、VDR22、振動計15a、マイク15b、傾斜計18、振動計19a及びマイク19b等により検出された船舶情報には、検出日時に係るUTC時間(DayTime-Z)を付して船舶情報DB35に蓄積する構成とすることにより、陸上の装置から船舶情報の送信要求を与える場合及び船舶1の船員が送信指示を与える場合等に、船舶情報収集装置24に対して送信する船舶情報の日時を指定することができる。
【0075】
また、振動計15a及びマイク15bを用いて主機15などの船内設備の振動及び音を検出し、振動計19a及びマイク19bを用いて電動機19などの船内設備の振動及び音を検出し、これらを船舶情報として船舶情報DB35に蓄積する構成とすることにより、蓄積された振動及び音の船舶情報を解析することによって船内設備の摩耗度及び疲労度等を推測し、故障を予測して早めの部品交換又はメンテナンス等を行うことができ、船内設備が故障した際には故障の原因を分析することができる。また、傾斜計18を用いて船舶1の船体の傾斜を検出し、船舶情報として船舶情報DB35に蓄積する構成とすることにより、海難事故の発生時などに事故原因の推測を行うことができる。
【0076】
また、船舶情報収集装置24は、予め定められた周期で船舶情報の蓄積を定期的に行うと共に、検出した種々の船舶情報から船舶1の異常を検知した場合に船舶情報の蓄積を行う構成とすることにより、船舶1に異常が発生したとき又は海難事故が発生したとき等の船舶情報を蓄積することができ、これらの原因究明に役立てることができる。また、船舶情報収集装置24は、振動計15a、マイク15b、傾斜計18、振動計19a及びマイク19bの検出値をメモリ34に所定時間分記憶し、船舶情報DB35への蓄積タイミングに達した場合にメモリ34に記憶した検出値を船舶情報として船舶情報DB35に蓄積する構成とすることにより、船舶1に異常が発生した場合などに、異常発生から所定時間前までの船舶情報を船舶情報DB35に蓄積することができ、異常発生の原因究明などをより確実に行うことができる。
【0077】
なお、本実施の形態においては、船舶情報収集システム2が無線通信装置21、VDR22、船内作業用PC23及び船舶情報収集装置24の4つの装置で構成されるものとしたが、これに限るものではなく、これら4つの装置の機能全てを備えた1つの船舶情報収集装置として構成してもよく、2つ、3つ又は5つ以上の複数の装置にて船舶情報収集システムを構成してもよい。また、船舶情報収集装置24が振動計15a、マイク15b、傾斜計18、振動計19a及びマイク19b等の検出値を受信してメモリ34に記憶する構成としたが、これに限るものではなく、船舶情報収集装置2は船舶情報の収集のみを行う構成とし、振動計15a、マイク15b及び傾斜計18等の検出値の受信などを別の装置で行う構成としてもよい。また、図6〜図10に示した船舶情報のデータ形式及び船舶情報の種類等は、一例であって、これらに限るものではなく、船舶情報収集装置24が収集する船舶情報はその他の種々の情報であってよい。
【符号の説明】
【0078】
1 船舶
2 船舶情報収集システム
4 サービス提供会社
5a 造船会社
5b 船舶管理会社
6 地上局
7 通信衛星
8 電話回線網
9 インターネット網
10 船内LAN
11 メール送受信用PC
12 PLCモデム
13 電力線
14 アークネット
15 主機
15a 振動計(船舶情報検出手段)
15b マイク(船舶情報検出手段)
16 発電機
17 ボイラ
18 傾斜計(船舶情報検出手段)
19 電動機
19a 振動計(船舶情報検出手段)
19b マイク(船舶情報検出手段)
21 無線通信装置(無線通信手段)
22 VDR(船舶情報検出手段)
23 船内作業用PC(情報受付手段、指示受付手段)
24 船舶情報収集装置(定期送信手段、要求受信手段、情報検索手段、応答送信手段、指示送信手段、異常検知手段)
31 制御部
32 表示部
33 操作部(指示受付手段)
34 メモリ(記憶手段)
35 船舶情報DB(情報蓄積手段)
36 船内LAN通信部
37 アークネット通信部
38 FBB通信処理部(定期送信手段、要求受信手段、応答送信手段、指示送信手段)
40 サーバ装置
50 PC
【特許請求の範囲】
【請求項1】
船舶に搭載され、
該船舶の航行に係る情報又は該船舶内の設備に係る情報を検出する船舶情報検出手段と、
前記船舶情報検出手段が検出した情報を所定のデータ形式に変換して蓄積する情報蓄積手段と、
陸上に設置された装置との間で情報の送受信を行う無線通信手段と、
前記情報蓄積手段に蓄積した情報を、前記無線通信手段により陸上の装置へ定期的に送信する定期送信手段と、
陸上の装置からの情報送信要求を前記無線通信手段により受信する要求受信手段と、
前記情報蓄積手段が蓄積した情報から、前記要求受信手段が受信した情報送信要求に含まれる送信条件に応じた情報を検索する情報検索手段と、
該情報検索手段が検索した情報を、前記無線通信手段により陸上の装置へ送信する応答送信手段と
を備えること
を特徴とする船舶情報収集装置。
【請求項2】
情報の入力を受け付ける情報受付手段と、
情報の送信指示を受け付ける指示受付手段と、
該指示受付手段が情報の送信指示を受け付けた場合に、前記情報蓄積手段に蓄積した情報を、前記無線通信手段により陸上の装置へ送信する指示送信手段と
を更に備え、
前記情報蓄積手段は、前記情報受付手段が受け付けた情報を所定のデータ形式に変換して蓄積するようにしてあること
を特徴とする請求項1に記載の船舶情報収集装置。
【請求項3】
前記情報蓄積手段は、蓄積する情報を所定のデータ形式に変換する際に、日付及び時刻に係る情報を前記情報検索手段による検索用情報として含むデータ形式に変換するようにしてあること
を特徴とする請求項1又は請求項2に記載の船舶情報収集装置。
【請求項4】
前記日付及び時刻に係る情報は、UTCに基づく日付及び時刻であること
を特徴とする請求項3に記載の船舶情報収集装置。
【請求項5】
前記船舶情報検出手段が検出する情報には、前記船舶内の設備の振動に係る情報、前記船舶内の設備が発する音に係る情報、又は、前記船舶の傾斜に係る情報を含むこと
を特徴とする請求項1乃至請求項4のいずれか1つに記載の船舶情報収集装置。
【請求項6】
前記船舶情報検出手段が検出した情報に応じて、前記船舶の異常を検知する異常検知手段を備え、
前記情報蓄積手段は、前記船舶情報検出手段が検出した情報の蓄積を定期的に行うと共に、前記異常検知手段が異常を検知した場合に前記船舶情報検出手段が検出した情報を蓄積するようにしてあること
を特徴とする請求項1乃至請求項5のいずれか1つに記載の船舶情報収集装置。
【請求項7】
前記船舶情報検出手段が検出した情報を、現時点から所定時間前まで記憶する記憶手段を備え、
前記情報蓄積手段は、所定の蓄積タイミングにて前記記憶手段から情報を読み出して蓄積するようにしてあること
を特徴とする請求項1乃至請求項6のいずれか1つに記載の船舶情報収集装置。
【請求項1】
船舶に搭載され、
該船舶の航行に係る情報又は該船舶内の設備に係る情報を検出する船舶情報検出手段と、
前記船舶情報検出手段が検出した情報を所定のデータ形式に変換して蓄積する情報蓄積手段と、
陸上に設置された装置との間で情報の送受信を行う無線通信手段と、
前記情報蓄積手段に蓄積した情報を、前記無線通信手段により陸上の装置へ定期的に送信する定期送信手段と、
陸上の装置からの情報送信要求を前記無線通信手段により受信する要求受信手段と、
前記情報蓄積手段が蓄積した情報から、前記要求受信手段が受信した情報送信要求に含まれる送信条件に応じた情報を検索する情報検索手段と、
該情報検索手段が検索した情報を、前記無線通信手段により陸上の装置へ送信する応答送信手段と
を備えること
を特徴とする船舶情報収集装置。
【請求項2】
情報の入力を受け付ける情報受付手段と、
情報の送信指示を受け付ける指示受付手段と、
該指示受付手段が情報の送信指示を受け付けた場合に、前記情報蓄積手段に蓄積した情報を、前記無線通信手段により陸上の装置へ送信する指示送信手段と
を更に備え、
前記情報蓄積手段は、前記情報受付手段が受け付けた情報を所定のデータ形式に変換して蓄積するようにしてあること
を特徴とする請求項1に記載の船舶情報収集装置。
【請求項3】
前記情報蓄積手段は、蓄積する情報を所定のデータ形式に変換する際に、日付及び時刻に係る情報を前記情報検索手段による検索用情報として含むデータ形式に変換するようにしてあること
を特徴とする請求項1又は請求項2に記載の船舶情報収集装置。
【請求項4】
前記日付及び時刻に係る情報は、UTCに基づく日付及び時刻であること
を特徴とする請求項3に記載の船舶情報収集装置。
【請求項5】
前記船舶情報検出手段が検出する情報には、前記船舶内の設備の振動に係る情報、前記船舶内の設備が発する音に係る情報、又は、前記船舶の傾斜に係る情報を含むこと
を特徴とする請求項1乃至請求項4のいずれか1つに記載の船舶情報収集装置。
【請求項6】
前記船舶情報検出手段が検出した情報に応じて、前記船舶の異常を検知する異常検知手段を備え、
前記情報蓄積手段は、前記船舶情報検出手段が検出した情報の蓄積を定期的に行うと共に、前記異常検知手段が異常を検知した場合に前記船舶情報検出手段が検出した情報を蓄積するようにしてあること
を特徴とする請求項1乃至請求項5のいずれか1つに記載の船舶情報収集装置。
【請求項7】
前記船舶情報検出手段が検出した情報を、現時点から所定時間前まで記憶する記憶手段を備え、
前記情報蓄積手段は、所定の蓄積タイミングにて前記記憶手段から情報を読み出して蓄積するようにしてあること
を特徴とする請求項1乃至請求項6のいずれか1つに記載の船舶情報収集装置。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図8】
【図9】
【図10】

【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2011−113538(P2011−113538A)
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願番号】特願2009−272478(P2009−272478)
【出願日】平成21年11月30日(2009.11.30)
【出願人】(391013092)渦潮電機株式会社 (10)
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願日】平成21年11月30日(2009.11.30)
【出願人】(391013092)渦潮電機株式会社 (10)
[ Back to top ]