
船舶探知装置、船舶探知プログラムおよび船舶探知装置の船舶探知方法
【課題】レーダ観測により得られた画像データに基づいて船舶を高い精度で探知できるようにすることを目的とする。
【解決手段】CFAR方式演算部120は、偏波組み合わせ毎に、船舶が表示されたレーダ画像191の画素領域を船舶推定領域としてCFAR方式で特定する。ウエーキ方式演算部121は、偏波組み合わせ毎に、船舶が表示されたレーダ画像191の画素領域を船舶特定領域としてウエーキ方式で特定する。SC比マップ生成部130は、偏波組み合わせ毎に、船舶候補領域(船舶推定領域、船舶特定領域の一部)にSC比(海面散乱波の推定強度に対する船舶散乱波の推定強度)を設定してSC比マップ197を生成する。SC比合算マップ生成部140は、偏波組み合わせが異なる複数のSC比マップ197a〜Nを合算してSC比合算マップ198を生成する。船舶探知部150は、SC比合算マップ198に基づいて船舶領域を特定する。
【解決手段】CFAR方式演算部120は、偏波組み合わせ毎に、船舶が表示されたレーダ画像191の画素領域を船舶推定領域としてCFAR方式で特定する。ウエーキ方式演算部121は、偏波組み合わせ毎に、船舶が表示されたレーダ画像191の画素領域を船舶特定領域としてウエーキ方式で特定する。SC比マップ生成部130は、偏波組み合わせ毎に、船舶候補領域(船舶推定領域、船舶特定領域の一部)にSC比(海面散乱波の推定強度に対する船舶散乱波の推定強度)を設定してSC比マップ197を生成する。SC比合算マップ生成部140は、偏波組み合わせが異なる複数のSC比マップ197a〜Nを合算してSC比合算マップ198を生成する。船舶探知部150は、SC比合算マップ198に基づいて船舶領域を特定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば、レーダ観測により得られた画像データから船舶を探知する船舶探知装置、船舶探知プログラムおよび船舶探知装置の船舶探知方法に関するものである。
【背景技術】
【0002】
合成開口レーダ(SAR:Synthetic Aperture Radar)を用いて偏波が異なる複数の画像を一度に撮像し、偏波が異なる複数の画像それぞれに対して目標物を探知し、目標物の移動速度を推定している。
しかし、得られる結果は偏波毎に異なってしまい、結果の整合性がとれない。
そこで、目標物の探知や目標物の移動速度の推定を高精度に実施するために、散乱理論に基づいた体系的な手法が求められている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−004398号公報
【特許文献2】特開2007−114093号公報
【非特許文献】
【0004】
【非特許文献1】S.O.Rice,“Reflection of electromagnetic waves from slightly rough surfaces,”Commun.Pure Appl.Math.,vol.4,pp.351−378,1951.
【非特許文献2】Fung, A. K., Z. Li, and K. S. Chen. Backscattering from a randomly rough dilectric surface. IEEE Transactions on Geoscience and Remote Sensing, 30, 356−369, 1992
【非特許文献3】A.Ishimaru,Wave propagation and scattering in random media,NY:IEEE Press,pp.479−480,1978.
【非特許文献4】M.Sekine and Y.Mao,Weibull Radar Clutter,Peter Peregrinus,London,1990
【非特許文献5】S.Sayama and M.Sekine,“Weibull,log−Weibull and K−distributed ground clutter modeling analyzed by AIC”,IEEE Trans.Aerosp.Electron.Syst.,vol.37,pp.1108−1113,2001
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、例えば、レーダ観測により得られた画像データに基づいて船舶を高い精度で探知し、船舶の速度を高い精度で推定できるようにすることを目的とする。
【課題を解決するための手段】
【0006】
本発明の船舶探知装置は、
船舶が航行する海面に向けてレーダから出射された出射偏波の振動方向と、船舶と海面とのいずれかで散乱してレーダに入射した入射偏波の振動方向とを組み合わせた偏波組み合わせ毎に、入射偏波の強度を入射偏波の入射角に対応する画素領域に設定した画像データをレーダ画像として記憶するレーダ画像記憶部と、
偏波組み合わせ毎に、船舶で散乱してレーダに入射する船舶散乱波の推定強度を入射角に対応付けて示す船舶散乱強度データと、海面で散乱してレーダに入射する海面散乱波の推定強度を入射角に対応付けて示す海面散乱強度データとを記憶する散乱強度データ記憶部と、
偏波組み合わせ毎に、当該偏波組み合わせの船舶散乱強度データと当該偏波組み合わせの海面散乱強度データとに基づいて船舶散乱波の推定強度と海面散乱波の推定強度との比率を推定強度比として入射角に対応付けて算出し、算出した推定強度比を入射角に対応付けて示す推定強度比データを生成する推定強度比算出部と、
偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像に基づいて、複数の船舶を表示する複数の画素領域を複数の船舶推定領域として所定の船舶領域推定アルゴリズムによって算出する船舶推定領域算出部と、
偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像に基づいて、複数の航跡を表示する複数の画素領域を複数の航跡推定領域として所定の航跡領域推定アルゴリズムによって算出する航跡推定領域算出部と、
偏波組み合わせ毎に、複数の航跡推定領域に基づいて複数の船舶を表示する複数の画素領域を複数の船舶特定領域として特定する船舶特定領域算出部と、
偏波組み合わせ毎に、当該偏波組み合わせの船舶散乱強度データに示される船舶散乱波の推定強度が当該偏波組み合わせの海面散乱強度データに示される海面散乱波の推定強度より大きい入射角の範囲を船舶入射角として判定する船舶入射角判定部と、
偏波組み合わせ毎に、当該偏波組み合わせの海面散乱強度データに示される海面散乱波の推定強度が当該偏波組み合わせの船舶散乱強度データに示される船舶散乱波の推定強度より大きい入射角の範囲を海面入射角として判定する海面入射角判定部と、
偏波組み合わせ毎に、当該偏波組み合わせの複数の船舶推定領域のうち当該偏波組み合わせの船舶入射角に対応する当該レーダ画像の画素領域に含まれる船舶推定領域を船舶候補領域として抽出し、当該偏波組み合わせの複数の船舶特定領域のうち当該偏波組み合わせの海面入射角に対応する当該レーダ画像の画素領域に含まれる船舶特定領域を船舶候補領域として抽出する船舶候補領域抽出部と、
偏波組み合わせ毎に、当該偏波組み合わせの複数の船舶候補領域それぞれの領域値として当該船舶候補領域に対応する入射角の推定強度比を当該偏波組み合わせの推定強度比データから取得する船舶候補領域値取得部と、
複数の偏波組み合わせの複数の船舶候補領域のうち2つ以上の船舶候補領域が重複する重複領域に対応する二次元領域に当該2つ以上の船舶候補領域の領域値を合計した合計値を設定し、他の船舶候補領域と重複しない船舶候補領域に対応する二次元領域に当該船舶候補領域の領域値を設定した二次元のマップデータを合算マップとして生成する合算マップ生成部と、
前記合算マップ内の二次元領域のうち所定の探知閾値より大きい領域値が設定された二次元領域を船舶を表示する船舶領域として特定する船舶領域特定部とを備える。
【0007】
前記船舶探知装置は、さらに、
偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像を生成するために使用されたレーダの観測データを記憶する観測データ記憶部と、
偏波組み合わせ毎に、当該偏波組み合わせのレーダ画像に対応する観測データに基づいて、前記船舶領域に表示される船舶の速度を船舶推定速度として所定の船舶速度推定アルゴリズムによって算出する船舶推定速度算出部と、
偏波組み合わせ毎に、当該偏波組み合わせの航跡推定領域に基づいて、前記船舶領域に表示される船舶の速度を船舶航跡推定速度として所定の船舶航跡速度推定アルゴリズムによって算出する船舶航跡推定速度算出部と、
偏波組み合わせ毎に、当該偏波組み合わせの船舶入射角に対応する当該レーダ画像の画素領域に前記船舶領域が含まれる場合、前記船舶推定速度に前記船舶領域に対応する入射角の推定強度比を乗算した値を船舶強度比速度として算出し、当該偏波組み合わせの海面入射角に対応する当該レーダ画像の画素領域に前記船舶領域が含まれる場合、前記船舶航跡推定速度に前記船舶領域に対応する入射角の推定強度比を乗算した値を船舶強度比速度として算出する船舶強度比速度算出部と、
複数の偏波組み合わせの複数の船舶強度比速度を合計した船舶強度比速度の合計値を算出し、複数の船舶強度比速度を算出するために使用した複数の推定強度比を合計した推定強度比の合計値を算出し、船舶強度比速度の合計値を推定強度比の合計値で除算した値を前記船舶領域に表示される船舶の速度として算出する船舶速度算出部とを備える。
【0008】
本発明の船舶探知装置は、
船舶と海面とのいずれかで散乱してレーダに入射した電磁波の強度を電磁波の入射角に対応する画素領域に設定した画像データをレーダ画像として記憶するレーダ画像記憶部と、
船舶で散乱してレーダに入射する船舶散乱波の推定強度を入射角に対応付けて示す船舶散乱強度データと、海面で散乱してレーダに入射する海面散乱波の推定強度を入射角に対応付けて示す海面散乱強度データとを記憶する散乱強度データ記憶部と、
前記レーダ画像に基づいて、複数の船舶を表示する複数の画素領域を複数の船舶推定領域として所定の船舶領域推定アルゴリズムによって算出する船舶推定領域算出部と、
前記レーダ画像に基づいて、複数の航跡を表示する複数の画素領域を複数の航跡推定領域として所定の航跡領域推定アルゴリズムによって算出する航跡推定領域算出部と、
複数の航跡推定領域に基づいて複数の船舶を表示する複数の画素領域を複数の船舶特定領域として特定する船舶特定領域算出部と、
前記船舶散乱強度データに示される船舶散乱波の推定強度が前記海面散乱強度データに示される海面散乱波の推定強度より大きい入射角の範囲を船舶入射角として判定する船舶入射角判定部と、
前記海面散乱強度データに示される海面散乱波の推定強度が前記船舶散乱強度データに示される船舶散乱波の推定強度より大きい入射角の範囲を海面入射角として判定する海面入射角判定部と、
複数の船舶推定領域のうち前記船舶入射角に対応する前記レーダ画像の画素領域に含まれる船舶推定領域と、複数の船舶特定領域のうち前記海面入射角に対応する前記レーダ画像の画素領域に含まれる船舶特定領域とを船舶を表示する船舶領域として特定する船舶領域特定部とを備える。
【0009】
前記船舶探知装置は、さらに、
前記レーダ画像を生成するために使用されたレーダの観測データを記憶する観測データ記憶部と、
前記レーダ画像に対応する観測データに基づいて、前記船舶領域に表示される船舶の速度を船舶推定速度として所定の船舶速度推定アルゴリズムによって算出する船舶推定速度算出部と、
前記航跡推定領域に基づいて、前記船舶領域に表示される船舶の速度を船舶航跡推定速度として所定の船舶航跡速度推定アルゴリズムによって算出する船舶航跡推定速度算出部と、
前記船舶入射角に対応する前記レーダ画像の画素領域に前記船舶領域が含まれる場合、前記船舶推定速度を船舶の速度として選択し、前記海面入射角に対応する前記レーダ画像の画素領域に前記船舶領域が含まれる場合、前記船舶航跡推定速度を船舶の速度として選択する船舶速度選択部とを備える。
【0010】
本発明の船舶探知プログラムは、
船舶が航行する海面に向けてレーダから出射された出射偏波の振動方向と、船舶と海面とのいずれかで散乱してレーダに入射した入射偏波の振動方向とを組み合わせた偏波組み合わせ毎に、入射偏波の強度を入射偏波の入射角に対応する画素領域に設定した画像データをレーダ画像として記憶するレーダ画像記憶部と、
偏波組み合わせ毎に、船舶で散乱してレーダに入射する船舶散乱波の推定強度を入射角に対応付けて示す船舶散乱強度データと、海面で散乱してレーダに入射する海面散乱波の推定強度を入射角に対応付けて示す海面散乱強度データとを記憶する散乱強度データ記憶部とを用いる。
前記船舶探知プログラムは、
偏波組み合わせ毎に、当該偏波組み合わせの船舶散乱強度データと当該偏波組み合わせの海面散乱強度データとに基づいて船舶散乱波の推定強度と海面散乱波の推定強度との比率を推定強度比として入射角に対応付けて算出し、算出した推定強度比を入射角に対応付けて示す推定強度比データを生成する推定強度比算出処理と、
偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像に基づいて、複数の船舶を表示する複数の画素領域を複数の船舶推定領域として所定の船舶領域推定アルゴリズムによって算出する船舶推定領域算出処理と、
偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像に基づいて、複数の航跡を表示する複数の画素領域を複数の航跡推定領域として所定の航跡領域推定アルゴリズムによって算出する航跡推定領域算出処理と、
偏波組み合わせ毎に、複数の航跡推定領域に基づいて複数の船舶を表示する複数の画素領域を複数の船舶特定領域として特定する船舶特定領域算出処理と、
偏波組み合わせ毎に、当該偏波組み合わせの船舶散乱強度データに示される船舶散乱波の推定強度が当該偏波組み合わせの海面散乱強度データに示される海面散乱波の推定強度より大きい入射角の範囲を船舶入射角として判定する船舶入射角判定処理と、
偏波組み合わせ毎に、当該偏波組み合わせの海面散乱強度データに示される海面散乱波の推定強度が当該偏波組み合わせの船舶散乱強度データに示される船舶散乱波の推定強度より大きい入射角の範囲を海面入射角として判定する海面入射角判定処理と、
偏波組み合わせ毎に、当該偏波組み合わせの複数の船舶推定領域のうち当該偏波組み合わせの船舶入射角に対応する当該レーダ画像の画素領域に含まれる船舶推定領域を船舶候補領域として抽出し、当該偏波組み合わせの複数の船舶特定領域のうち当該偏波組み合わせの海面入射角に対応する当該レーダ画像の画素領域に含まれる船舶特定領域を船舶候補領域として抽出する船舶候補領域抽出処理と、
偏波組み合わせ毎に、当該偏波組み合わせの複数の船舶候補領域それぞれの領域値として当該船舶候補領域に対応する入射角の推定強度比を当該偏波組み合わせの推定強度比データから取得する船舶候補領域値取得処理と、
複数の偏波組み合わせの複数の船舶候補領域のうち2つ以上の船舶候補領域が重複する重複領域に対応する二次元領域に当該2つ以上の船舶候補領域の領域値を合計した合計値を設定し、他の船舶候補領域と重複しない船舶候補領域に対応する二次元領域に当該船舶候補領域の領域値を設定した二次元のマップデータを合算マップとして生成する合算マップ生成処理と、
前記合算マップ内の二次元領域のうち所定の探知閾値より大きい領域値が設定された二次元領域を船舶を表示する船舶領域として特定する船舶領域特定処理とをコンピュータに実行させる。
【0011】
前記船舶探知プログラムは、さらに、
偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像を生成するために使用されたレーダの観測データを記憶する観測データ記憶部を用いる。
前記船舶探知プログラムは、さらに、
偏波組み合わせ毎に、当該偏波組み合わせのレーダ画像に対応する観測データに基づいて、前記船舶領域に表示される船舶の速度を船舶推定速度として所定の船舶速度推定アルゴリズムによって算出する船舶推定速度算出処理と、
偏波組み合わせ毎に、当該偏波組み合わせの航跡推定領域に基づいて、前記船舶領域に表示される船舶の速度を船舶航跡推定速度として所定の船舶航跡速度推定アルゴリズムによって算出する船舶航跡推定速度算出処理と、
偏波組み合わせ毎に、当該偏波組み合わせの船舶入射角に対応する当該レーダ画像の画素領域に前記船舶領域が含まれる場合、前記船舶推定速度に前記船舶領域に対応する入射角の推定強度比を乗算した値を船舶強度比速度として算出し、当該偏波組み合わせの海面入射角に対応する当該レーダ画像の画素領域に前記船舶領域が含まれる場合、前記船舶航跡推定速度に前記船舶領域に対応する入射角の推定強度比を乗算した値を船舶強度比速度として算出する船舶強度比速度算出処理と、
複数の偏波組み合わせの複数の船舶強度比速度を合計した船舶強度比速度の合計値を算出し、複数の船舶強度比速度を算出するために使用した複数の推定強度比を合計した推定強度比の合計値を算出し、船舶強度比速度の合計値を推定強度比の合計値で除算した値を前記船舶領域に表示される船舶の速度として算出する船舶速度算出処理とをコンピュータに実行させる。
【0012】
本発明の船舶探知プログラムは、
船舶と海面とのいずれかで散乱してレーダに入射した電磁波の強度を電磁波の入射角に対応する画素領域に設定した画像データをレーダ画像として記憶するレーダ画像記憶部と、
船舶で散乱してレーダに入射する船舶散乱波の推定強度を入射角に対応付けて示す船舶散乱強度データと、海面で散乱してレーダに入射する海面散乱波の推定強度を入射角に対応付けて示す海面散乱強度データとを記憶する散乱強度データ記憶部を用いる。
前記船舶探知プログラムは、
前記レーダ画像に基づいて、複数の船舶を表示する複数の画素領域を複数の船舶推定領域として所定の船舶領域推定アルゴリズムによって算出する船舶推定領域算出処理と、
前記レーダ画像に基づいて、複数の航跡を表示する複数の画素領域を複数の航跡推定領域として所定の航跡領域推定アルゴリズムによって算出する航跡推定領域算出処理と、
複数の航跡推定領域に基づいて複数の船舶を表示する複数の画素領域を複数の船舶特定領域として特定する船舶特定領域算出処理と、
前記船舶散乱強度データに示される船舶散乱波の推定強度が前記海面散乱強度データに示される海面散乱波の推定強度より大きい入射角の範囲を船舶入射角として判定する船舶入射角判定処理と、
前記海面散乱強度データに示される海面散乱波の推定強度が前記船舶散乱強度データに示される船舶散乱波の推定強度より大きい入射角の範囲を海面入射角として判定する海面入射角判定処理と、
複数の船舶推定領域のうち前記船舶入射角に対応する前記レーダ画像の画素領域に含まれる船舶推定領域と、複数の船舶特定領域のうち前記海面入射角に対応する前記レーダ画像の画素領域に含まれる船舶特定領域とを船舶を表示する船舶領域として特定する船舶領域特定処理とをコンピュータに実行させる。
【0013】
前記船舶探知プログラムは、さらに、
前記レーダ画像を生成するために使用されたレーダの観測データを記憶する観測データ記憶部を用いる。
前記船舶探知プログラムは、さらに、
前記レーダ画像に対応する観測データに基づいて、前記船舶領域に表示される船舶の速度を船舶推定速度として所定の船舶速度推定アルゴリズムによって算出する船舶推定速度算出処理と、
前記航跡推定領域に基づいて、前記船舶領域に表示される船舶の速度を船舶航跡推定速度として所定の船舶航跡速度推定アルゴリズムによって算出する船舶航跡推定速度算出処理と、
前記船舶入射角に対応する前記レーダ画像の画素領域に前記船舶領域が含まれる場合、前記船舶推定速度を船舶の速度として選択し、前記海面入射角に対応する前記レーダ画像の画素領域に前記船舶領域が含まれる場合、前記船舶航跡推定速度を船舶の速度として選択する船舶速度選択処理とをコンピュータに実行させる。
【0014】
本発明の船舶探知装置の船舶探知方法において、
船舶探知装置は、
船舶が航行する海面に向けてレーダから出射された出射偏波の振動方向と、船舶と海面とのいずれかで散乱してレーダに入射した入射偏波の振動方向とを組み合わせた偏波組み合わせ毎に、入射偏波の強度を入射偏波の入射角に対応する画素領域に設定した画像データをレーダ画像として記憶するレーダ画像記憶部と、
偏波組み合わせ毎に、船舶で散乱してレーダに入射する船舶散乱波の推定強度を入射角に対応付けて示す船舶散乱強度データと、海面で散乱してレーダに入射する海面散乱波の推定強度を入射角に対応付けて示す海面散乱強度データとを記憶する散乱強度データ記憶部とを備える。
前記船舶探知方法において、
推定強度比算出部が、偏波組み合わせ毎に、当該偏波組み合わせの船舶散乱強度データと当該偏波組み合わせの海面散乱強度データとに基づいて船舶散乱波の推定強度と海面散乱波の推定強度との比率を推定強度比として入射角に対応付けて算出し、算出した推定強度比を入射角に対応付けて示す推定強度比データを生成し、
船舶推定領域算出部が、偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像に基づいて、複数の船舶を表示する複数の画素領域を複数の船舶推定領域として所定の船舶領域推定アルゴリズムによって算出し、
航跡推定領域算出部が、偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像に基づいて、複数の航跡を表示する複数の画素領域を複数の航跡推定領域として所定の航跡領域推定アルゴリズムによって算出し、
船舶特定領域算出部が、偏波組み合わせ毎に、複数の航跡推定領域に基づいて複数の船舶を表示する複数の画素領域を複数の船舶特定領域として特定し、
船舶入射角判定部が、偏波組み合わせ毎に、当該偏波組み合わせの船舶散乱強度データに示される船舶散乱波の推定強度が当該偏波組み合わせの海面散乱強度データに示される海面散乱波の推定強度より大きい入射角の範囲を船舶入射角として判定し、
海面入射角判定部が、偏波組み合わせ毎に、当該偏波組み合わせの海面散乱強度データに示される海面散乱波の推定強度が当該偏波組み合わせの船舶散乱強度データに示される船舶散乱波の推定強度より大きい入射角の範囲を海面入射角として判定し、
船舶候補領域抽出部が、偏波組み合わせ毎に、当該偏波組み合わせの複数の船舶推定領域のうち当該偏波組み合わせの船舶入射角に対応する当該レーダ画像の画素領域に含まれる船舶推定領域を船舶候補領域として抽出し、当該偏波組み合わせの複数の船舶特定領域のうち当該偏波組み合わせの海面入射角に対応する当該レーダ画像の画素領域に含まれる船舶特定領域を船舶候補領域として抽出し、
船舶候補領域値取得部が、偏波組み合わせ毎に、当該偏波組み合わせの複数の船舶候補領域それぞれの領域値として当該船舶候補領域に対応する入射角の推定強度比を当該偏波組み合わせの推定強度比データから取得し、
合算マップ生成部が、複数の偏波組み合わせの複数の船舶候補領域のうち2つ以上の船舶候補領域が重複する重複領域に対応する二次元領域に当該2つ以上の船舶候補領域の領域値を合計した合計値を設定し、他の船舶候補領域と重複しない船舶候補領域に対応する二次元領域に当該船舶候補領域の領域値を設定した二次元のマップデータを合算マップとして生成し、
船舶領域特定部が、前記合算マップ内の二次元領域のうち所定の探知閾値より大きい領域値が設定された二次元領域を船舶を表示する船舶領域として特定する。
【0015】
本発明の船舶探知装置の船舶探知方法において、
船舶探知装置は、
船舶と海面とのいずれかで散乱してレーダに入射した電磁波の強度を電磁波の入射角に対応する画素領域に設定した画像データをレーダ画像として記憶するレーダ画像記憶部と、
船舶で散乱してレーダに入射する船舶散乱波の推定強度を入射角に対応付けて示す船舶散乱強度データと、海面で散乱してレーダに入射する海面散乱波の推定強度を入射角に対応付けて示す海面散乱強度データとを記憶する散乱強度データ記憶部とを備える。
前記船舶探知方法において、
船舶推定領域算出部が、前記レーダ画像に基づいて、複数の船舶を表示する複数の画素領域を複数の船舶推定領域として所定の船舶領域推定アルゴリズムによって算出し、
航跡推定領域算出部が、前記レーダ画像に基づいて、複数の航跡を表示する複数の画素領域を複数の航跡推定領域として所定の航跡領域推定アルゴリズムによって算出し、
船舶特定領域算出部が、複数の航跡推定領域に基づいて複数の船舶を表示する複数の画素領域を複数の船舶特定領域として特定し、
船舶入射角判定部が、前記船舶散乱強度データに示される船舶散乱波の推定強度が前記海面散乱強度データに示される海面散乱波の推定強度より大きい入射角の範囲を船舶入射角として判定し、
海面入射角判定部が、前記海面散乱強度データに示される海面散乱波の推定強度が前記船舶散乱強度データに示される船舶散乱波の推定強度より大きい入射角の範囲を海面入射角として判定し、
船舶領域特定部が、複数の船舶推定領域のうち前記船舶入射角に対応する前記レーダ画像の画素領域に含まれる船舶推定領域と、複数の船舶特定領域のうち前記海面入射角に対応する前記レーダ画像の画素領域に含まれる船舶特定領域とを船舶を表示する船舶領域として特定する。
【発明の効果】
【0016】
本発明によれば、例えば、偏波組み合わせが異なる複数のレーダ画像に基づいて船舶を高い精度で探知することができる。
【図面の簡単な説明】
【0017】
【図1】実施の形態1におけるレーダ観測を示す図。
【図2】実施の形態1における船舶探知装置100の機能構成図。
【図3】実施の形態1における船舶探知装置100の船舶探知方法を示すフローチャート。
【図4】実施の形態1におけるシミュレーション対象の海面散乱波203および船舶散乱波204を示す図。
【図5】実施の形態1における船舶散乱強度データ192と海面散乱強度データ193とSC比データ194とを示す図。
【図6】CFAR方式による目標物検出方法を示す概要図。
【図7】ウエーキ方式による航跡検出方法を示す概要図。
【図8】実施の形態1におけるSC比マップ生成処理(S130)を示すフローチャート。
【図9】実施の形態1におけるSC比マップ生成処理(S130)の概要図。
【図10】実施の形態1におけるSC比マップ生成処理(S130)の概要図。
【図11】実施の形態1におけるSC比合算マップ生成処理(S140)を示すフローチャート。
【図12】実施の形態1におけるSC比合算マップ198の概要図。
【図13】実施の形態1における船舶探知データ199の概要図。
【図14】実施の形態1における船舶探知装置100のハードウェア資源の一例を示す図。
【図15】実施の形態2における船舶探知装置100の機能構成図。
【図16】実施の形態2における船舶探知方法を示すフローチャート。
【図17】ドップラーシフト方式による速度推定方法を示す概要図。
【図18】実施の形態2における船舶速度算出処理(S170)を示すフローチャート。
【図19】実施の形態2における船舶速度算出処理(S170)の概要図。
【図20】実施の形態2における船舶速度算出処理(S170)の概要図。
【図21】実施の形態3における船舶探知装置100の機能構成図。
【図22】実施の形態3における船舶探知方法を示すフローチャート。
【図23】実施の形態3における船舶領域特定処理(S210)を示すフローチャート。
【図24】実施の形態4における船舶探知装置100の機能構成図。
【図25】実施の形態4における船舶探知方法を示すフローチャート。
【図26】実施の形態4における船舶速度選択処理(S220)を示すフローチャート。
【発明を実施するための形態】
【0018】
実施の形態1.
観測地域を異なる偏波を用いてレーダ観測して得られる複数のレーダ画像に基づいて、観測地域に存在する船舶を探知する形態について説明する。
【0019】
図1は、実施の形態1におけるレーダ観測を示す図である。
実施の形態1におけるレーダ観測について、図1に基づいて説明する。
【0020】
レーダ200は、人工衛星、航空機その他の飛行体に搭載され、アクティブ方式で観測地域を観測する観測装置である。
アクティブ方式とは、電磁波を観測地域に向けて照射し、観測地域で反射して後方散乱した電磁波を入射し、入射した電磁波の強度を計測する方式である。
【0021】
例えば、合成開口レーダ(SAR:Synthetic Aperture Radar)はレーダ200の一例である。
【0022】
レーダ200の進行方向を「アジマス方向」といい、電磁波の入射方向の水平成分を「レンジ方向」という。また、電磁波の入射方向と鉛直方向とが成す角度を「入射角(またはオフナディア角)」という。
【0023】
以下、レーダ200で計測された電磁波の入射強度を画素値として示す画像データを「レーダ画像」という。
レーダ画像は、アジマス方向(u座標)とレンジ方向(v座標)との二次元で観測地域を表示する。レーダ画像において、レンジ方向の座標値が小さいほど入射角が小さく、レンジ方向の座標値が大きいほど入射角が大きい。
【0024】
また、レーダ200が観測地域へ出射する偏波の振動方向と、観測地域で後方散乱してレーダ200に入射した偏波の振動方向との組み合わせを「偏波組み合わせ」という。
偏波とは、特定の振動方向(水平方向、垂直方向など)に振動する電磁波のことである。
【0025】
例えば、偏波組み合わせとして、「HH」(またはHHHHと記す)、「HV」(またはHVHVと記す)、「VV」(またはVVVVと記す)、「HHVV」、「HHHV」、「HVVV」などの組み合わせが存在する。
「H」は水平方向の偏波を示し、「V」は垂直方向の偏波を示す。
偏波組み合わせを二文字で表した場合、1文字目が出射した偏波を示し、2文字目が入射した偏波を示す。
偏波組み合わせを四文字で表した場合、1、2文字目が出射した2つの偏波を示し、3、4文字目が入射した2つの偏波を示す。
【0026】
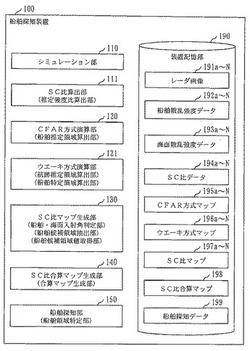
図2は、実施の形態1における船舶探知装置100の機能構成図である。
実施の形態1における船舶探知装置100の機能構成について、図2に基づいて説明する。
【0027】
船舶探知装置100は、装置記憶部190を備える。
【0028】
装置記憶部190(レーダ画像記憶部、散乱強度データ記憶部の一例)は、船舶探知装置100で使用される各種データ(符号「191」〜「199」を付したデータなど)を記憶装置を用いて記憶する。符号の末尾に「a〜N」を付したデータは偏波組み合わせが異なる複数のデータを意味する。
【0029】
例えば、装置記憶部190は、出射偏波の振動方向と入射偏波の振動方向とを組み合わせた偏波組み合わせ毎に、入射偏波の強度を入射偏波の入射角に対応する画素領域に設定した画像データをレーダ画像191として記憶する。出射偏波とは、船舶が航行する海面に向けてレーダ200から出射された電磁波である。入射偏波とは、船舶と海面とのいずれかで散乱してレーダ200に入射した電磁波である。
また、装置記憶部190は、偏波組み合わせ毎に、船舶散乱波の推定強度を入射角に対応付けて示す船舶散乱強度データ192と、海面散乱波の推定強度を入射角に対応付けて示す海面散乱強度データ193とを記憶する。船舶散乱波とは、船舶で散乱してレーダ200に入射する電磁波である。海面散乱波とは、海面で散乱してレーダ200に入射する電磁波である。
【0030】
さらに、船舶探知装置100は、シミュレーション部110とSC比算出部111とを備える。
【0031】
シミュレーション部110は、偏波組み合わせ毎に、当該偏波組み合わせの船舶散乱波の推定強度を入射角に対応付けて所定の船舶散乱強度推定アルゴリズムによって算出する。シミュレーション部110は、偏波組み合わせ毎に、算出した船舶散乱波の推定強度を入射角に対応付けて示す船舶散乱強度データ192を生成する。
シミュレーション部110は、偏波組み合わせ毎に、当該偏波組み合わせの海面散乱波の推定強度を入射角に対応付けて所定の海面散乱強度推定アルゴリズムによって算出する。シミュレーション部110は、偏波組み合わせ毎に、算出した海面散乱波の推定強度を入射角に対応付けて示す海面散乱強度データ193を生成する。
【0032】
SC比算出部111(推定強度比算出部の一例)は、偏波組み合わせ毎に、当該偏波組み合わせの船舶散乱強度データ192と当該偏波組み合わせの海面散乱強度データ193とに基づいて船舶散乱波の推定強度と海面散乱波の推定強度との比率をSC比(推定強度比の一例)として入射角に対応付けて算出する。SC比算出部111は、偏波組み合わせ毎に、算出したSC比を入射角に対応付けて示すSC比データ194(推定強度比データの一例)を生成する。
【0033】
さらに、船舶探知装置100は、CFAR方式演算部120とウエーキ方式演算部121とを備える。
【0034】
CFAR方式演算部120(船舶推定領域算出部の一例)は、偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像191に基づいて、複数の船舶を表示する複数の画素領域を複数の船舶推定領域としてCFAR方式(船舶領域推定アルゴリズムの一例)によって算出する。
【0035】
ウエーキ方式演算部121(航跡推定領域算出部、船舶特定領域算出部の一例)は、偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像191に基づいて、複数の航跡を表示する複数の画素領域を複数の航跡推定領域としてウエーキ方式(航跡領域推定アルゴリズムの一例)によって算出する。
ウエーキ方式演算部121は、偏波組み合わせ毎に、複数の航跡推定領域に基づいて複数の船舶を表示する複数の画素領域を複数の船舶特定領域として特定する。
【0036】
さらに、船舶探知装置100は、SC比マップ生成部130とSC比合算マップ生成部140とを備える。
【0037】
SC比マップ生成部130(船舶入射角判定部、海面入射角判定部の一例)は、偏波組み合わせ毎に、当該偏波組み合わせの船舶散乱強度データ192に示される船舶散乱波の推定強度が当該偏波組み合わせの海面散乱強度データ193に示される海面散乱波の推定強度より大きい入射角の範囲(SC比>0)を船舶入射角として判定する。
SC比マップ生成部130は、偏波組み合わせ毎に、当該偏波組み合わせの海面散乱強度データ193に示される海面散乱波の推定強度が当該偏波組み合わせの船舶散乱強度データ192に示される船舶散乱波の推定強度より大きい入射角の範囲(SC比<0)を海面入射角として判定する。
【0038】
SC比マップ生成部130(船舶候補領域抽出部、船舶候補領域値取得部の一例)は、偏波組み合わせ毎に、当該偏波組み合わせの複数の船舶推定領域のうち当該偏波組み合わせの船舶入射角に対応する当該レーダ画像191の画素領域に含まれる船舶推定領域を船舶候補領域として抽出する。
SC比マップ生成部130は、偏波組み合わせ毎に、当該偏波組み合わせの複数の船舶特定領域のうち当該偏波組み合わせの海面入射角に対応する当該レーダ画像191の画素領域に含まれる船舶特定領域を船舶候補領域として抽出する。
SC比マップ生成部130は、偏波組み合わせ毎に、当該偏波組み合わせの複数の船舶候補領域それぞれの領域値として当該船舶候補領域に対応する入射角のSC比を当該偏波組み合わせのSC比データ194から取得する。
【0039】
SC比合算マップ生成部140(合算マップ生成部の一例)は、SC比合算マップ198(二次元のマップデータの一例)を生成する。
SC比合算マップ198は、複数の偏波組み合わせの複数の船舶候補領域のうち2つ以上の船舶候補領域が重複する重複領域に対応する二次元領域に当該2つ以上の船舶候補領域の領域値を合計した合計値を設定したマップデータである。
また、SC比合算マップ198は、他の船舶候補領域と重複しない船舶候補領域に対応する二次元領域に当該船舶候補領域の領域値を設定したマップデータである。
【0040】
さらに、船舶探知装置100は、船舶探知部150を備える。
船舶探知部150(船舶領域特定部の一例)は、SC比合算マップ198内の二次元領域のうち所定の探知閾値より大きい領域値が設定された二次元領域を船舶を表示する船舶領域として特定する。
【0041】
図3は、実施の形態1における船舶探知装置100の船舶探知方法を示すフローチャートである。
実施の形態1における船舶探知方法の処理の流れについて、図3に基づいて説明する。
【0042】
まず、船舶探知方法の処理の概要について説明する。
シミュレーション部110は、偏波組み合わせ毎に、船舶で後方散乱する船舶散乱波の強度と海面で後方散乱する海面散乱波の強度とを算出する(S110)。
SC比算出部111は、偏波組み合わせ毎に、船舶散乱強度と海面散乱強度との強度比(SC比)を算出する(S111)。
CFAR方式演算部120は、偏波組み合わせ毎に、船舶が表示されたレーダ画像191の画素領域を船舶推定領域としてCFAR方式で特定する(S120)。
ウエーキ方式演算部121は、偏波組み合わせ毎に、船舶が表示されたレーダ画像191の画素領域を船舶特定領域としてウエーキ方式で特定する(S121)。
SC比マップ生成部130は、偏波組み合わせ毎に、船舶候補領域(船舶推定領域、船舶特定領域の一部)に対応する画素領域にSC比を設定してSC比マップ197を生成する(S130)。
SC比合算マップ生成部140は、偏波組み合わせが異なる複数のSC比マップ197a〜Nを合算してSC比合算マップ198を生成する(S140)。
船舶探知部150は、SC比合算マップ198の設定値に基づいて、船舶が表示されたレーダ画像191の画素領域を船舶領域として特定する(S150)。
【0043】
次に、船舶探知方法の処理の詳細について説明する。
【0044】
S110において、シミュレーション部110は、偏波組み合わせ毎に、船舶で後方散乱する船舶散乱波の強度を所定のシミュレーション方法によって算出する。
さらに、シミュレーション部110は、偏波組み合わせ毎に、海面で後方散乱する海面散乱波の強度を所定のシミュレーション方法によって算出する。
【0045】
図4は、実施の形態1におけるシミュレーション対象の海面散乱波203および船舶散乱波204を示す図である。
実施の形態1における海面散乱波203および船舶散乱波204のシミュレーションについて、図4に基づいて説明する。
【0046】
例えば、シミュレーション部110は、SPM(Small Perturbation Model)またはIEM(Integral Equation Model)を用いて、海面201をシミュレーションする。SPMについては非特許文献1に開示され、IEMについては非特許文献2に開示されている。
シミュレーション部110は、シミュレーションした海面201に基づいて、海面201で後方散乱する海面散乱波203だけがレーダ200に入射した場合(図4(1))の入射強度を入射角θ(例えば0度〜90度)に対応付けて算出する。
【0047】
例えば、シミュレーション部110は、Kirchhoff Modelを用いて、船舶202の表面をシミュレーションする。Kirchhoff Modelについては非特許文献3に開示されている。
シミュレーション部110は、シミュレーションした船舶202の表面に基づいて、海面201で反射した後に船舶202で後方散乱する船舶散乱波204だけがレーダ200に入射した場合(図4(2))の入射強度を入射角θに対応付けて算出する。
【0048】
以下、船舶散乱波204の入射強度を「船舶散乱強度」といい、海面散乱波203の入射強度を「海面散乱強度」という。
また、船舶散乱強度と入射角θとを対応付けて設定したデータを「船舶散乱強度データ192」といい、海面散乱強度と入射角θとを対応付けて設定したデータを「海面散乱強度データ193」という。
シミュレーション部110は、船舶散乱強度データ192と海面散乱強度データ193とを生成する。
【0049】
図5は、実施の形態1における船舶散乱強度データ192と海面散乱強度データ193とSC比データ194とを示す図である。
図5(1)の船舶散乱強度データ192において、船舶散乱強度は、入射角が小さいほど小さく、入射角が大きいほど大きい。
また、図5(1)の海面散乱強度データ193において、海面散乱強度は、入射角が小さいほど大きく、入射角が大きいほど小さい。
但し、船舶散乱強度と入射角との関係、海面散乱強度と入射角との関係、船舶散乱強度と海面散乱強度との大小関係は、偏波組み合わせによって異なる。つまり、船舶散乱強度データ192および海面散乱強度データ193は偏波組み合わせによって異なる。
【0050】
図3に戻り、S111から説明を続ける。
【0051】
S111において、SC比算出部111は、偏波組み合わせ毎に、当該偏波組み合わせの船舶散乱強度データ192と海面散乱強度データ193とに基づいてSC(Signal−Clutter)比を算出し、算出したSC比を示すSC比データ194を生成する。
【0052】
SC比とは、船舶散乱強度(Signal)と海面散乱強度(Clutter)との比を表す値である。
SC比データ194は、SC比と入射角とを対応付けて設定したデータである。
【0053】
以下、SC比算出部111は、海面散乱強度に対する船舶散乱強度の比の対数値をSC比として算出するものとする。船舶散乱強度を「S」とし、海面散乱強度を「C」とすると、対数値は「10log10(S/C)」(単位:デシベル)で表される。
この場合、図5(2)に示すように、船舶散乱強度が海面散乱強度より小さい入射角に対応するSC比は負の値になり、船舶散乱強度が海面散乱強度より大きい入射角に対応するSC比は正の値になる。
【0054】
図3に戻り、S120から説明を続ける。
【0055】
S120において、CFAR方式演算部120は、偏波組み合わせ毎に、当該偏波組み合わせのレーダ画像191をCFAR(Constant False Alarm Rate)方式で処理し、CFAR方式マップ195を生成する。
CFAR方式とは、目標物(例えば、船舶)が表示された画素領域を検出する方式である。
【0056】
以下、CFAR方式で検出された画素領域を「船舶推定領域」という。
CFAR方式マップ195は、船舶推定領域に「1」を設定し、船舶推定領域以外の領域に「0」を設定した二次元のマップデータ(画像データ)である。つまり、CFAR方式マップ195は船舶推定領域を示す。
【0057】
図6は、CFAR方式による目標物検出方法を示す概要図である。
CFAR方式による目標物検出方法について、図6に基づいて説明する。
【0058】
CFAR方式において、レーダ画像191の画素毎(または複数画素から成る画素領域毎)に以下の処理を行う。
(1)レーダ画像191から画素(または画素領域)をターゲットセル210として選択し、ターゲットセル210に対するレファレンスセル212をレーダ画像191から抽出する。レファレンスセル212とはガードセル211の周囲にある画素領域であり、ガードセル211とはターゲットセル210の周囲にある画素領域である。
(2)レファレンスセル212の画素値の分布を示すヒストグラム213に基づいて、レファレンスセル212の標準偏差sおよび平均値mを算出し、平均値mに標準偏差sの定数N倍を加算した値を閾値Tとして算出する。
そして、ターゲットセル210の画素値と閾値Tとを比較し、画素値が閾値Tより大きいターゲットセル210を目標物(例えば、船舶)が表示された画素(または画素領域)として検出する。
【0059】
CFAR方式の詳細については、非特許文献4および非特許文献5に開示されている。
【0060】
図3に戻り、S121から説明を続ける。
【0061】
S121において、ウエーキ方式演算部121は、偏波組み合わせ毎に、当該偏波組み合わせのレーダ画像191をウエーキ方式(航跡検出方式)で処理する。
ウエーキ方式とは、航跡(ウエーキ)が表示された画素領域を検出する方式である。
以下、ウエーキ方式で算出された画素領域を「航跡推定領域」という。
【0062】
さらに、ウエーキ方式演算部121は、航跡推定領域毎に、当該航跡推定領域に基づいて船舶が表示された画素領域を特定する。
以下、航跡推定領域に基づいて特定された画素領域を「船舶特定領域」という。
【0063】
そして、ウエーキ方式演算部121は、偏波組み合わせ毎に、船舶特定領域を示すウエーキ方式マップ196を生成する。
【0064】
ウエーキ方式マップ196は、船舶特定領域に「1」を設定し、船舶特定領域以外の領域に「0」を設定した二次元のマップデータ(画像データ)である。
【0065】
図7は、ウエーキ方式による航跡検出方法を示す概要図である。
ウエーキ方式による航跡検出方法について、図7に基づいて説明する。
【0066】
ウエーキ方式において、レーダ画像191の画素領域毎に以下の処理を行う。
レーダ画像191から所定の大きさの画素領域をレファレンスセル220として選択する。
次に、レファレンスセル220の中心を回転軸にして疑似直線を回転させ、疑似直線上に並ぶ複数画素を航跡候補221として順に抽出し、抽出した航跡候補221毎に当該航跡候補221の画素値の合計(合計画素値)を算出する。
次に、航跡候補221毎に当該航跡候補221の合計画素値を所定の明部閾値および所定の暗部閾値と比較する。明部閾値はレーダ画像191に明るく表示される航跡(レーダ200から見て航跡の波の手前側)を検出するための閾値であり、暗部閾値はレーダ画像191に暗く表示される航跡(レーダ200から見て航跡の波の影になる部分)を検出するための閾値である。
そして、合計画素値が明部閾値以上または暗部閾値以下である航跡候補221を航跡が表示された画素領域として検出する。
【0067】
ウエーキ方式の詳細については、特許文献1に開示されている。
【0068】
以下、ウエーキ方式演算部121は、ウエーキ方式で検出した画素領域(航跡推定領域)を船舶特定領域として特定するものとする。
但し、ウエーキ方式演算部121は、航跡推定領域の一端部または両端部に位置する所定の大きさの画素領域を船舶特定領域222として特定しても構わない。
【0069】
図3に戻り、S130から説明を続ける。
【0070】
S130において、SC比マップ生成部130は、偏波組み合わせ毎に、当該偏波組み合わせのCFAR方式マップ195、ウエーキ方式マップ196およびSC比データ194に基づいてSC比マップ197を生成する。
SC比マップ197は、船舶散乱強度と海面散乱強度との大小関係に基づいて選択された船舶推定領域および船舶特定領域にSC比を設定した二次元のマップデータ(画像データ)である。
【0071】
図8は、実施の形態1におけるSC比マップ生成処理(S130)を示すフローチャートである。
実施の形態1におけるSC比マップ生成処理(S130)について、図8に基づいて説明する。
【0072】
S131において、SC比マップ生成部130は未選択の偏波組み合わせを選択する。以下、S131で選択した偏波組み合わせを「選択組み合わせ」という。
S131の後、S132に進む。
【0073】
S132において、SC比マップ生成部130は選択組み合わせのレーダ画像191に対応する入射角の範囲から未選択の入射角を選択する。
例えば、レーダ画像191が20度から80度の入射角の範囲で観測地域を表示した画像であれば、SC比マップ生成部130は20度から80度まで順に入射角を選択する。
以下、S132で選択した入射角を「選択角」という。
S132の後、S133に進む。
【0074】
S133において、SC比マップ生成部130は、選択組み合わせのSC比データ194から選択角のSC比を取得する。以下、S133で取得したSC比を「対象SC比」という。
S133の後、S134に進む。
【0075】
S134において、SC比マップ生成部130は対象SC比の正負を判定する。
対象SC比が正の場合にはS134aに進み、対象SC比が負の場合にはS134bに進む。
また、対象SC比がゼロの場合にはS134aとS134bとのうち所定のいずれかに進む。
【0076】
S134aにおいて、SC比マップ生成部130は、選択組み合わせのCFAR方式マップ195から選択角に対応する画素行を抽出する。以下、S134aで抽出した画素行を「抽出行」という。
S134aの後、S135に進む。
【0077】
S134bにおいて、SC比マップ生成部130は、選択組み合わせのウエーキ方式マップ196から選択角に対応する画素行を抽出する。以下、S134bで抽出した画素行を「抽出行」という。
S134bの後、S135に進む。
【0078】
S135において、SC比マップ生成部130は、選択組み合わせのSC比マップ197に抽出行を設定する。
S135の後、S136に進む。
【0079】
S136において、SC比マップ生成部130は、SC比マップ197の抽出行内の画素毎に、当該画素の画素値に対象SC比の絶対値を乗算し、乗算して得られた値を当該画素に画素値として設定する。
S136の後、S137に進む。
【0080】
S137において、SC比マップ生成部130は、未選択の入射角が残っているか否かを判定する。
未選択の入射角が残っている場合(YES)、S132に戻る。
全ての入射角を選択済みの場合(NO)、S138に進む。
【0081】
S138において、SC比マップ生成部130は、未選択の偏波組み合わせが残っているか否かを判定する。
未選択の偏波組み合わせが残っている場合(YES)、S131に戻る。
全ての偏波組み合わせを選択済みの場合(NO)、SC比マップ生成処理(S130)は終了する。
【0082】
図9、図10は、実施の形態1におけるSC比マップ生成処理(S130)の概要図である。
実施の形態1におけるSC比マップ生成処理(S130)の概要について、図9と図10とに基づいて説明する。
【0083】
図9、図10において、CFAR方式マップ195、ウエーキ方式マップ196およびSC比マップ197は、レンジ方向の座標値vが小さいほど入射角が小さく、レンジ方向の座標値vが大きいほど入射角が大きい。
【0084】
図9のSC比データ194において、SC比が負の入射角(0度以上35度未満)では、船舶散乱強度より海面散乱強度の方が大きいため(海面支配的)、レーダ画像191から検出した海面の航跡に基づいた船舶特定領域231を示すウエーキ方式マップ196を選択する(S134、S134b)。
一方、SC比が正またはゼロの入射角(35度以上90度未満)では、海面散乱強度よりも船舶散乱強度の方が大きいため(船舶支配的)、レーダ画像191から検出した船舶推定領域230を示すCFAR方式マップ195を選択する(S134、S134a)。
【0085】
CFAR方式マップ195およびウエーキ方式マップ196は、船舶推定領域230または船舶特定領域231(図中の丸印)に「1」を設定し、その他の領域に「0」を設定した二次元のマップデータ(画像データ)である。
【0086】
図10において、CFAR方式マップ195から選択した斜線の領域とウエーキ方式マップ196から選択した斜線の領域とから成るSC比マップ197に対して入射角毎にSC比の絶対値を乗じることにより(S135、S136)、船舶候補領域232にSC比の絶対値を設定することができる。つまり、SC比マップ197は船舶候補領域232のSC比の絶対値を示す。例えば、入射角が30度の船舶候補領域232には30度の入射角に対応するSC比の絶対値が設定され、入射角が40度の船舶候補領域232には40度の入射角に対応するSC比の絶対値が設定される。
船舶候補領域232とは、CFAR方式マップ195から選択された領域に含まれる船舶推定領域とウエーキ方式マップ196から選択された領域に含まれる船舶特定領域とを意味する。
【0087】
図3に戻り、S140から説明を続ける。
【0088】
S140において、SC比合算マップ生成部140は、複数の偏波組み合わせそれぞれのSC比マップ197を合算してSC比合算マップ198を生成する。
SC比合算マップ198は、複数のSC比合算マップ198それぞれに設定されている船舶候補領域のSC比(の絶対値)を合計した値を領域毎に設定した二次元のマップデータ(画像データ)である。
【0089】
図11は、実施の形態1におけるSC比合算マップ生成処理(S140)を示すフローチャートである。
実施の形態1におけるSC比合算マップ生成処理(S140)について、図11に基づいて説明する。
【0090】
S141において、SC比合算マップ生成部140は複数の偏波組み合わせから偏波組み合わせを一つ選択し、選択した偏波組み合わせのSC比マップ197を複製する。
以下、SC比マップ197の複製を「SC比合算マップ198」という。
S141の後、S142に進む。
【0091】
S142において、SC比合算マップ生成部140は未選択の偏波組み合わせを選択する。以下、S142で選択した偏波組み合わせを「選択組み合わせ」という。
S142の後、S143に進む。
【0092】
S143において、SC比合算マップ生成部140は、選択組み合わせのSC比マップ197から未選択の画素を選択する。以下、S143で選択した画素を「選択画素」という。
S143の後、S144に進む。
【0093】
S144において、SC比合算マップ生成部140は、選択画素のuv座標と一致(または対応)するSC比合算マップ198の画素に選択画素の画素値を加算する。
S144の後、S145に進む。
【0094】
S145において、SC比合算マップ生成部140は、SC比マップ197に未選択の画素が残っているか否かを判定する。
未選択の画素が残っている場合(YES)、S143に戻る。
全ての画素を選択した場合(NO)、S146に進む。
【0095】
S146において、SC比合算マップ生成部140は、S141とS142とのいずれにおいても選択されていない未選択の偏波組み合わせが残っているか否かを判定する。
未選択の偏波組み合わせが残っている場合(YES)、S142に戻る。
全ての偏波組み合わせを選択した場合(NO)、SC比合算マップ生成処理(S140)は終了する。
【0096】
図12は、実施の形態1におけるSC比合算マップ198の概要図である。
実施の形態1におけるSC比合算マップ198の概要について、図12に基づいて説明する。
【0097】
例えば、「HH」「HV」「VV」の3通りを偏波組み合わせとする。
【0098】
「HH」のSC比マップ197aは、(0,0)−(9,9)の船舶候補領域232にSC比「20」が設定されている。
「HV」のSC比マップ197bは、(5,0)−(14,9)の船舶候補領域232にSC比「10」が設定されている。
「VV」のSC比マップ197cは、(10,10)−(19,19)の船舶候補領域232にSC比「15」が設定されている。
【0099】
SC比合算マップ198は、(0,0)−(4,9)の領域にSC比「20」が設定され、(5,0)−(9,9)の領域にSC比「30(=20+10)」が設定され、(10,0)−(14,9)の領域にSC比「10」が設定される。
また、SC比合算マップ198は、(10,10)−(19,19)の領域にSC比「15」が設定される。
【0100】
つまり、SC比合算マップ198は、船舶候補領域232が重複する領域ほど設定値が大きく、また、SC比が大きい船舶候補領域232ほど設定値が大きい。
【0101】
図3に戻り、S150から説明を続ける。
【0102】
S150において、船舶探知部150は、SC比合算マップ198の画素毎に当該画素の設定値を所定の探知閾値と比較し、探知閾値以上の値が設定されているSC比合算マップ198の画素領域を特定する。
そして、船舶探知部150は、特定した画素領域とuv座標が一致(または対応)するレーダ画像191の画素領域を船舶領域として特定する。船舶領域とは、船舶が表示された画素領域のことである。
【0103】
さらに、船舶探知部150は、船舶領域に対応する現実の座標値(例えば、緯度と経度)を船舶が存在した場所の座標値として算出し、船舶探知データ199を生成する。
船舶探知データ199は、探知した船舶毎に、船舶領域のuv座標値と現実の座標値とを示したデータである。
【0104】
例えば、レーダ画像191の画素毎にレーダ200によって電磁波の入射強度を観測した観測時刻、レーダ200によって観測された電磁波の入射角、レーダ200の飛行位置の座標値(例えば、緯度、経度、高度)などを含んだレーダ観測情報を装置記憶部190に予め記憶しておく。
船舶探知部150は、レーダ画像191の船舶領域の入射強度を観測した観測時刻をレーダ観測情報から取得し、観測時刻のレーダ200の座標値と観測時刻の電磁波の入射角をレーダ観測情報から取得する。そして、船舶探知部150は、レーダ200の座標値を通る入射角方向のベクトルを算出し、観測地域の海面を表す平面を算出し、算出したベクトルと平面との交点の座標値を船舶の座標値として算出する。
また、レーダ画像191の画素に対応付けて観測地域の座標値を示す画像座標データを装置記憶部190に予め記憶しておいてもよい。この場合、船舶探知部150は、レーダ画像191の船舶領域に対応付けられた座標値を船舶の座標値として画像座標値データから取得する。
【0105】
S150により、船舶探知方法の処理は終了する。
【0106】
図13は、実施の形態1における船舶探知データ199の概要図である。
実施の形態1における船舶探知データ199の概要について、図13に基づいて説明する。
【0107】
船舶探知データ199は、偏波組み合わせが異なる複数のSC比マップ197を合算して生成したSC比合算マップ198から設定値(SC比の合計値)が大きい領域を船舶領域233として抽出したデータである。
【0108】
図14は、実施の形態1における船舶探知装置100のハードウェア資源の一例を示す図である。
図14において、船舶探知装置100は、CPU911(Central・Processing・Unit)(マイクロプロセッサ、マイクロコンピュータともいう)を備えている。CPU911は、バス912を介してROM913、RAM914、通信装置915、表示装置901、キーボード902、マウス903、ドライブ装置904、プリンタ装置905、磁気ディスク装置920と接続され、これらのハードウェアデバイスを制御する。ドライブ装置904は、FD(Flexible・Disk・Drive)、CD(Compact Disc)、DVD(Digital・Versatile・Disc)などの記憶媒体を読み書きする装置である。
【0109】
通信装置915は、有線または無線で、LAN(Local Area Network)、インターネット、電話回線などの通信網に接続している。
【0110】
磁気ディスク装置920には、OS921(オペレーティングシステム)、ウィンドウシステム922、プログラム群923、ファイル群924が記憶されている。
【0111】
プログラム群923には、実施の形態において「〜部」として説明する機能を実行するプログラムが含まれる。プログラムは、CPU911により読み出され実行される。すなわち、船舶探知プログラムは、「〜部」としてコンピュータを機能させるものであり、また「〜部」の手順や方法をコンピュータに実行させるものである。
【0112】
ファイル群924には、実施の形態において説明する「〜部」で使用される各種データ(入力、出力、判定結果、計算結果、処理結果など)が含まれる。
【0113】
実施の形態において構成図およびフローチャートに含まれている矢印は主としてデータや信号の入出力を示す。
【0114】
実施の形態において「〜部」として説明するものは「〜回路」、「〜装置」、「〜機器」であってもよく、また「〜ステップ」、「〜手順」、「〜処理」であってもよい。すなわち、「〜部」として説明するものは、ファームウェア、ソフトウェア、ハードウェアまたはこれらの組み合わせのいずれで実装されても構わない。
【0115】
実施の形態1では、SC比の正負に基づいてCFAR方式マップ195とウエーキ方式マップ196とのいずれを選択するか判定した(図8、S134)。
但し、船舶散乱強度データ192と海面散乱強度データ193とを比較して判定しても構わない。この場合、船舶散乱強度が海面散乱強度より大きければCFAR方式マップ195を選択し、海面散乱強度が船舶散乱強度より大きければウエーキ方式マップ196を選択する。
【0116】
また、海面散乱強度(C)に対する船舶散乱強度(S)の対数値「10log10(S/C)」をSC比としてSC比マップ197を生成した(図8、S136)。
但し、対数値ではなく真値のSC比を用いてSC比マップ197を生成しても構わない。この場合、船舶散乱強度が海面散乱強度より大きければ「S/C」をSC比として用い、海面散乱強度が船舶散乱強度より大きければ「C/S」をSC比として用いる。
【0117】
また、上記のCFAR方式以外の方式で船舶推定領域を特定しても構わず(図3、S120)、上記のウエーキ方式以外の方式で航跡推定領域および船舶特定領域を特定しても構わない(図3、S121)。
【0118】
実施の形態2.
実施の形態1で探知した船舶について移動速度を推定する形態について説明する。
以下、実施の形態1で説明していない事項について主に説明する。説明を省略する事項は実施の形態1と同様である。
【0119】
図15は、実施の形態2における船舶探知装置100の機能構成図である。
実施の形態2における船舶探知装置100の機能構成について、図15に基づいて説明する。
【0120】
船舶探知装置100は、船舶探知処理部112を備える。
船舶探知処理部112は、実施の形態1(図2参照)で説明したCFAR方式演算部120、ウエーキ方式演算部121、SC比マップ生成部130、SC比合算マップ生成部140および船舶探知部150の機能を有する。
【0121】
船舶探知装置100は、さらに、ISAR方式演算部160、ドップラーシフト方式演算部161および船舶速度算出部170を備える。
【0122】
装置記憶部190(観測データ記憶部の一例)は、偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像191を生成するために使用されたレーダ200の観測データ189を記憶する。
【0123】
ISAR方式演算部160(船舶推定速度算出部の一例)は、偏波組み合わせ毎に、当該偏波組み合わせのレーダ画像191に対応する観測データ189に基づいて、船舶領域に表示される船舶の速度を船舶推定速度としてISAR方式(船舶速度推定アルゴリズムの一例)によって算出する。
【0124】
ドップラーシフト方式演算部161(船舶航跡推定速度算出部の一例)は、偏波組み合わせ毎に、当該偏波組み合わせの航跡推定領域に基づいて、船舶領域に表示される船舶の速度を船舶航跡推定速度としてドップラーシフト方式(船舶航跡速度推定アルゴリズムの一例)によって算出する。
【0125】
船舶速度算出部170(船舶強度比速度算出部の一例)は、偏波組み合わせ毎に、当該偏波組み合わせの船舶入射角に対応する当該レーダ画像191の画素領域に船舶領域が含まれる場合、船舶推定速度に船舶領域に対応する入射角のSC比を乗算した値を船舶SC比速度(船舶強度比速度の一例)として算出する。
船舶速度算出部170は、偏波組み合わせ毎に、当該偏波組み合わせの海面入射角に対応する当該レーダ画像の画素領域に船舶領域が含まれる場合、船舶航跡推定速度に船舶領域に対応する入射角のSC比を乗算した値を船舶SC比速度として算出する。
船舶速度算出部170は、複数の偏波組み合わせの複数の船舶SC比速度を合計した船舶SC比速度の合計値を算出し、複数の船舶SC比速度を算出するために使用した複数のSC比を合計したSC比の合計値を算出する。
船舶速度算出部170は、船舶SC比速度の合計値をSC比の合計値で除算した値を船舶領域に表示される船舶の速度として算出する。
【0126】
図16は、実施の形態2における船舶探知方法を示すフローチャートである。
実施の形態2における船舶探知方法の処理の流れについて、図16に基づいて説明する。
【0127】
実施の形態2における船舶探知方法では、実施の形態1で説明した処理(図3参照)に加えて、S160、S161およびS170を実行する。
以下、S160、S161およびS170について主に説明する。
【0128】
S160において、ISAR方式演算部160は、偏波組み合わせ毎に、当該偏波組み合わせの観測データ189を速度指定ISAR(Inverse Synthetic Aperture Radar)方式で処理し、船舶推定速度データ181を生成する。
【0129】
ISAR方式では、レーダ観測により得られた観測データ189をレンジマイグレーション処理し、高速フーリエ変換し、アジマス圧縮し、逆高速フーリエ変換してレーダ画像191を生成する。
速度指定ISAR方式とは、船舶の推定速度に基づいて参照関数を生成し、生成した参照関数をアジマス圧縮に使用するISAR方式である。
速度指定ISAR方式では、船舶の推定速度が正しいほど、船舶領域が鮮明に表示される。例えば、船舶領域には、周囲の画素領域よりも所定の割合以上または所定の画素値以上大きな画素値が設定される。
【0130】
ISAR方式演算部160は、船舶探知処理部112(実施の形態1における船舶探知部150)により特定された船舶領域を対象にして、船舶領域に存在する船舶の速度ベクトルの推定値を速度指定ISAR方式で算出する。
以下、速度指定ISAR方式で算出された船舶の速度ベクトルの推定値を「船舶推定速度」という。
船舶推定速度データ181は、船舶領域毎に船舶推定速度を示したデータである。
【0131】
速度指定ISAR方式の詳細については、特許文献2に開示されている。
【0132】
S160の後、S161に進む。
【0133】
S161において、ドップラーシフト方式演算部161は、偏波組み合わせ毎に、当該偏波組み合わせのウエーキ方式マップ196に基づいてドップラーシフト方式の速度推定処理を行い、船舶航跡推定速度データ182を生成する。
【0134】
ドップラーシフト方式とは、レーダ画像191に表示される航跡と船舶とのずれ量に基づいて、船舶の速度ベクトルの推定値を算出する方式である。
【0135】
以下、ドップラーシフト方式で算出された船舶の速度ベクトルの推定値を「船舶航跡推定速度」という。
船舶航跡推定速度データ182は、船舶領域毎に船舶航跡推定速度を示したデータである。
【0136】
図17は、ドップラーシフト方式による速度推定方法を示す概要図である。
ドップラーシフト方式による速度推定方法について、図17に基づいて説明する。
【0137】
レーダ画像191において、レンジ方向に移動している目標物(例えば、船舶240)は実際の位置からアジマス方向にずれた位置に表示される。目標物のレンジ方向の速度が大きいほどアジマス方向のずれ量は大きく、目標物のレンジ方向の速度が小さいほどアジマス方向のずれ量は小さい。これを「ドップラーシフト」という。
【0138】
ドップラーシフト方式演算部161は、船舶探知処理部112により特定された船舶領域を対象にして船舶領域に最も近い航跡推定領域をウエーキ方式マップ196から抽出する。
そして、ドップラーシフト方式演算部161は、船舶領域と航跡推定領域とのずれ量(画素数)に基づいて、船舶領域に存在する船舶の推定速度を算出する。
【0139】
ドップラーシフト方式の詳細については、特許文献1に開示されている。
【0140】
図16に戻り、S170から説明を続ける。
【0141】
S170において、船舶速度算出部170は、船舶領域毎に、船舶推定速度と船舶航跡推定速度とSC比とに基づいて船舶速度を算出する。
そして、船舶速度算出部170は、船舶領域毎に船舶領域に存在する船舶の速度を示した船舶速度データ183を生成する。
S170により、船舶探知方法の処理は終了する。
【0142】
図18は、実施の形態2における船舶速度算出処理(S170)を示すフローチャートである。
実施の形態2における船舶速度算出処理(S170)について、図18に基づいて説明する。
【0143】
S171において、船舶速度算出部170は、船舶探知データ199から未選択の船舶領域を選択する。
以下、S171で選択した船舶領域を「選択船舶領域」という。
S171の後、S172に進む。
【0144】
S172において、船舶速度算出部170は、選択船舶領域に対応するレーダ画像191の入射角を算出する。
以下、S172で算出した入射角を「対象入射角」という。
S172の後、S173に進む。
【0145】
S173において、船舶速度算出部170は、選択船舶領域に対して未選択の偏波組み合わせを選択する。
以下、S173で選択した偏波組み合わせを「選択組み合わせ」という。
S173の後、S174に進む。
【0146】
S174において、船舶速度算出部170は、選択組み合わせのSC比データ194から対象入射角のSC比を取得する。
以下、S174で取得したSC比を「対象SC比」という。
S174の後、S175に進む。
【0147】
S175において、船舶速度算出部170は、対象SC比の正負を判定する。
対象SC比が正の場合にはS175aに進み、対象SC比が負の場合にはS175bに進む。
また、対象SC比がゼロの場合にはS175aとS175bとのうち所定のいずれかに進む。
【0148】
S175aにおいて、船舶速度算出部170は、選択組み合わせの船舶推定速度データ181から選択船舶領域に対応する船舶推定速度を取得する。
以下、S175aで取得した船舶推定速度を「船舶候補速度」という。
S175aの後、S176に進む。
【0149】
S175bにおいて、船舶速度算出部170は、選択組み合わせの船舶航跡推定速度データ182から選択船舶領域に対応する船舶航跡推定速度を取得する。
以下、175bで取得した船舶航跡推定速度を「船舶候補速度」という。
S175bの後、S176に進む。
【0150】
S176において、船舶速度算出部170は、船舶候補速度に対象SC比の絶対値を乗算する。
以下、S176で算出した値を「船舶SC比速度」という。
S176の後、S177に進む。
【0151】
S177において、船舶速度算出部170は、選択船舶領域に対して未選択の偏波組み合わせが残っているか否かを判定する。
未選択の偏波組み合わせが残っている場合(YES)、S173に戻る。
全ての偏波組み合わせを選択済みの場合(NO)、S178に進む。
【0152】
S178において、船舶速度算出部170は、偏波組み合わせ毎に算出した船舶SC比速度を合計し、偏波組み合わせ毎に取得した対象SC比(の絶対値)を合計する。
そして、船舶速度算出部170は、船舶SC比速度の合計値を対象SC比の合計値で除算する。
船舶速度算出部170は、算出した値を選択船舶領域に対応する船舶速度として船舶速度データ183に設定する。
S178の後、S179に進む。
【0153】
S179において、船舶速度算出部170は、未選択の船舶領域が残っているか否かを判定する。
未選択の船舶領域が残っている場合(YES)、S171に戻る。
全ての船舶領域を選択済みの場合(NO)、船舶速度算出処理(S170)は終了する。
【0154】
図19、図20は、実施の形態2における船舶速度算出処理(S170)の概要図である。
実施の形態2における船舶速度算出処理(S170)の概要について、図19と図20とに基づいて説明する。
【0155】
図19において、船舶領域AはSC比が負の入射角(0度以上35度未満)に対応する領域に含まれるため、船舶領域Aの速度ベクトルとして船舶航跡推定速度データ182に示される速度ベクトルを選択する(S175、S175b)。
一方、船舶領域B・Cは正の入射角(35度以上90度未満)に対応する領域に含まれるため、船舶領域B・Cの速度ベクトルとして船舶推定速度データ181に示される速度ベクトルを選択する(S175、S175a)。
【0156】
図20において、偏波組み合わせ毎に、船舶領域Aの速度ベクトルに船舶領域Aの入射角に対応するSC比を乗じることにより、船舶領域Aの速度ベクトルをSC比で重み付けした船舶SC比速度を算出する(S176)。
そして、船舶領域Aの船舶SC比速度を合計し、船舶領域Aの速度ベクトルに乗じたSC比を合計し、船舶SC比速度の合計値をSC比の合計値で割った値を船舶領域Aの速度ベクトル(船舶速度)として算出する(S178)。
同様に、船舶領域Bと船舶領域Cとのそれぞれの速度ベクトル(船舶速度)を算出する。
【0157】
実施の形態2では、SC比の正負に基づいて船舶推定速度データ181と船舶航跡推定速度データ182とのいずれを選択するか判定した(図18、S175)。
但し、船舶散乱強度データ192と海面散乱強度データ193とを比較して判定しても構わない。この場合、船舶散乱強度が海面散乱強度より大きければ船舶推定速度データ181を選択し、海面散乱強度が船舶散乱強度より大きければ船舶航跡推定速度データ182を選択する。
【0158】
また、海面散乱強度(C)に対する船舶散乱強度(S)の対数値「10log10(S/C)」をSC比として船舶SC比速度を算出した(図18、S176)。
但し、対数値ではなく真値のSC比を用いて船舶SC比速度を算出しても構わない。この場合、船舶散乱強度が海面散乱強度より大きければ「S/C」をSC比として用い、海面散乱強度が船舶散乱強度より大きければ「C/S」をSC比として用いる。
【0159】
上記のISAR方式以外の方式で船舶推定速度を算出しても構わず(図16、S160)、上記のドップラーシフト方式以外の方式で船舶航跡推定速度を算出しても構わない(図16、S161)。
【0160】
実施の形態3.
一つの偏波組み合わせのレーダ画像191に基づいて船舶を探知する形態について説明する。
以下、実施の形態1と異なる事項について主に説明する。説明を省略する事項については実施の形態1と同様である。
【0161】
図21は、実施の形態3における船舶探知装置100の機能構成図である。
実施の形態3における船舶探知装置100の機能構成について、図21に基づいて説明する。
【0162】
船舶探知装置100は、実施の形態1で説明したSC比マップ生成部130とSC比合算マップ生成部140とを備えない。
【0163】
装置記憶部190(レーダ画像記憶部、散乱強度データ記憶部の一例)は、船舶と海面とのいずれかで散乱してレーダに入射した電磁波の強度を電磁波の入射角に対応する画素領域に設定した画像データをレーダ画像191として記憶する。
また、装置記憶部190は、船舶で散乱してレーダに入射する船舶散乱波の推定強度を入射角に対応付けて示す船舶散乱強度データ192と、海面で散乱してレーダに入射する海面散乱波の推定強度を入射角に対応付けて示す海面散乱強度データ193とを記憶する。
【0164】
CFAR方式演算部120(船舶推定領域算出部の一例)は、レーダ画像191に基づいて、複数の船舶を表示する複数の画素領域を複数の船舶推定領域としてCFAR方式(船舶領域推定アルゴリズムの一例)によって算出する。
【0165】
ウエーキ方式演算部121(航跡推定領域算出部、船舶特定領域算出部の一例)は、レーダ画像191に基づいて、複数の航跡を表示する複数の画素領域を複数の航跡推定領域としてウエーキ方式(航跡領域推定アルゴリズムの一例)によって算出する。
ウエーキ方式演算部121は、複数の航跡推定領域に基づいて複数の船舶を表示する複数の画素領域を複数の船舶特定領域として特定する。
【0166】
船舶探知部150(船舶入射角判定部、海面入射角判定部の一例)は、船舶散乱強度データ192に示される船舶散乱波の推定強度が海面散乱強度データ193に示される海面散乱波の推定強度より大きい入射角の範囲(SC比>0)を船舶入射角として判定する。
船舶探知部150は、海面散乱強度データ193に示される海面散乱波の推定強度が船舶散乱強度データ192に示される船舶散乱波の推定強度より大きい入射角の範囲(SC比<0)を海面入射角として判定する。
【0167】
船舶探知部150(船舶領域特定部の一例)は、複数の船舶推定領域のうち船舶入射角に対応するレーダ画像191の画素領域に含まれる船舶推定領域と、複数の船舶特定領域のうち海面入射角に対応するレーダ画像191の画素領域に含まれる船舶特定領域とを船舶を表示する船舶領域として特定する。
【0168】
図22は、実施の形態3における船舶探知方法を示すフローチャートである。
実施の形態3における船舶探知方法の処理について、図22に基づいて説明する。
【0169】
S110B〜S121Bは、実施の形態1(図3参照)で説明したS110〜S121に対応する処理である。
但し、S110B〜S121Bでは、偏波組み合わせ毎に処理を行わない。
【0170】
S210において、船舶探知部150は、船舶入射角領域内の船舶推定領域と海面入射角領域内の船舶特定領域とを船舶領域として特定する。
船舶入射角領域とは、SC比が正の値になる入射角(船舶入射角)に対応するレーダ画像191の画素領域のことである。
海面入射角領域とは、SC比が負の値になる入射角(海面入射角)に対応するレーダ画像191の画素領域のことである。
【0171】
図23は、実施の形態3における船舶領域特定処理(S210)を示すフローチャートである。
実施の形態3における船舶領域特定処理(S210)について、図23に基づいて説明する。
【0172】
S211において、船舶探知部150はレーダ画像191に対応する入射角の範囲から未選択の入射角を選択する。
例えば、レーダ画像191が20度から80度の入射角の範囲で観測地域を表示した画像であれば、船舶探知部150は20度から80度まで順に入射角を選択する。
以下、S211で選択した入射角を「選択角」という。
S211の後、S212に進む。
【0173】
S212において、船舶探知部150は、SC比データ194から選択角のSC比を取得する。以下、S212で取得したSC比を「対象SC比」という。
S212の後、S213に進む。
【0174】
S213において、船舶探知部150は対象SC比の正負を判定する。
対象SC比が正の場合にはS213aに進み、対象SC比が負の場合にはS213bに進む。
また、対象SC比がゼロの場合にはS213aとS213bとのうち所定のいずれかに進む。
【0175】
S213aにおいて、船舶探知部150は、CFAR方式マップ195から選択角に対応する画素行を抽出する。以下、S213aで抽出した画素行を「抽出行」という。
S213aの後、S214に進む。
【0176】
S213bにおいて、船舶探知部150は、ウエーキ方式マップ196から選択角に対応する画素行を抽出する。以下、S213bで抽出した画素行を「抽出行」という。
S213bの後、S214に進む。
【0177】
S214において、船舶探知部150は、船舶領域マップ184に抽出行を設定する。
船舶領域マップ184は、船舶領域に「1」を設定し、船舶領域以外の領域に「0」を設定した二次元のマップデータ(画像データ)である。
S214の後、S215に進む。
【0178】
S215において、船舶探知部150は、未選択の入射角が残っているか否かを判定する。
未選択の入射角が残っている場合(YES)、S211に戻る。
全ての入射角を選択済みの場合(NO)、S216に進む。
【0179】
S216において、船舶探知部150は、船舶領域マップ184から船舶領域を特定する。
S216の後、S217に進む。
【0180】
S217において、船舶探知部150は、実施の形態1(図3、S150)と同様に、船舶領域に対応する現実の座標値を算出し、船舶探知データ199を生成する。
S217により、船舶領域特定処理(S210)は終了する。
【0181】
実施の形態1と同様に、SC比の正負を判定せずに船舶散乱強度データ192と海面散乱強度データ193とを比較し、CFAR方式マップ195とウエーキ方式マップ196とのいずれかを選択しても構わない(図23、S213)。
【0182】
上記のCFAR方式以外の方式で船舶推定領域を特定しても構わず(図22、S120B)、上記のウエーキ方式以外の方式で航跡推定領域および船舶特定領域を特定しても構わない(図22、S121B)。
【0183】
実施の形態4.
実施の形態3で探知した船舶について移動速度を推定する形態について説明する。
以下、実施の形態2と異なる事項について主に説明する。説明を省略する事項は実施の形態2と同様である。
【0184】
図24は、実施の形態4における船舶探知装置100の機能構成図である。
実施の形態4における船舶探知装置100の機能構成について、図24に基づいて説明する。
【0185】
船舶探知装置100は、船舶速度算出部170の代わりに船舶速度選択部171を備える。
【0186】
装置記憶部190(観測データ記憶部の一例)は、レーダ画像191を生成するために使用されたレーダの観測データ189を記憶する。
【0187】
ISAR方式演算部160(船舶推定速度算出部の一例)は、レーダ画像191に対応する観測データ189に基づいて、船舶領域に表示される船舶の速度を船舶推定速度としてISAR方式(船舶速度推定アルゴリズムの一例)によって算出する。
【0188】
ドップラーシフト方式演算部161(船舶航跡推定速度算出部の一例)は、航跡推定領域に基づいて、船舶領域に表示される船舶の速度を船舶航跡推定速度としてドップラーシフト方式(船舶航跡速度推定アルゴリズムの一例)によって算出する。
【0189】
船舶速度選択部171は、船舶入射角に対応するレーダ画像191の画素領域に船舶領域が含まれる場合、船舶推定速度を船舶の速度として選択する。
船舶速度選択部171は、海面入射角に対応するレーダ画像191の画素領域に船舶領域が含まれる場合、船舶航跡推定速度を船舶の速度として選択する。
【0190】
図25は、実施の形態4における船舶探知方法を示すフローチャートである。
実施の形態4における船舶探知方法の処理の流れについて、図25に基づいて説明する。
【0191】
S110B〜S210は、実施の形態3(図22参照)と同じである。
【0192】
S160BおよびS161Bは、実施の形態2(図16参照)で説明したS160およびS161に対応する処理である。
但し、S160BおよびS161Bでは、偏波組み合わせ毎に処理を行わない。
【0193】
S220において、船舶速度選択部171は、船舶領域毎に、SC比に基づいて船舶推定速度と船舶航跡推定速度とのいずれかを船舶速度として選択する。
【0194】
図26は、実施の形態4における船舶速度選択処理(S220)を示すフローチャートである。
実施の形態4における船舶速度選択処理(S220)について、図26に基づいて説明する。
【0195】
S221において、船舶速度選択部171は、船舶探知データ199から未選択の船舶領域を選択する。
以下、S221で選択した船舶領域を「選択船舶領域」という。
S221の後、S222に進む。
【0196】
S222において、船舶速度選択部171は、選択船舶領域に対応するレーダ画像191の入射角を算出する。
以下、S222で算出した入射角を「対象入射角」という。
S222の後、S223に進む。
【0197】
S223において、船舶速度選択部171は、SC比データ194から対象入射角のSC比を取得する。
以下、S223で取得したSC比を「対象SC比」という。
S223の後、S224に進む。
【0198】
S224において、船舶速度選択部171は、対象SC比の正負を判定する。
対象SC比が正の場合にはS224aに進み、対象SC比が負の場合にはS224bに進む。
また、対象SC比がゼロの場合にはS224aとS224bとのうち所定のいずれかに進む。
【0199】
S224aにおいて、船舶速度選択部171は、船舶推定速度データ181から選択船舶領域に対応する船舶推定速度を船舶速度として取得する。
S224aの後、S225に進む。
【0200】
S224bにおいて、船舶速度選択部171は、船舶航跡推定速度データ182から選択船舶領域に対応する船舶航跡推定速度を船舶速度として取得する。
S224bの後、S225に進む。
【0201】
S225において、船舶速度選択部171は、未選択の船舶領域が残っているか否かを判定する。
未選択の船舶領域が残っている場合(YES)、S221に戻る。
全ての選択領域を選択済みの場合(NO)、船舶速度選択処理(S220)は終了する。
【0202】
実施の形態2と同様に、SC比の正負を判断せずに船舶散乱強度データ192と海面散乱強度データ193とを比較し、船舶推定速度データ181と船舶航跡推定速度データ182とのいずれかを選択しても構わない(図26、S224)。
【0203】
上記のISAR方式以外の方式で船舶推定速度を算出しても構わず(図25、S160B)、上記のドップラーシフト方式以外の方式で船舶航跡推定速度を算出しても構わない(図25、S161B)。
【符号の説明】
【0204】
100 船舶探知装置、110 シミュレーション部、111 SC比算出部、112 船舶探知処理部、120 CFAR方式演算部、121 ウエーキ方式演算部、130 SC比マップ生成部、140 SC比合算マップ生成部、150 船舶探知部、160 ISAR方式演算部、161 ドップラーシフト方式演算部、170 船舶速度算出部、171 船舶速度選択部、181 船舶推定速度データ、182 船舶航跡推定速度データ、183 船舶速度データ、184 船舶領域マップ、189 観測データ、190 装置記憶部、191 レーダ画像、192 船舶散乱強度データ、193 海面散乱強度データ、194 SC比データ、195 CFAR方式マップ、196 ウエーキ方式マップ、197 SC比マップ、198 SC比合算マップ、199 船舶探知データ、200 レーダ、201 海面、202 船舶、203 海面散乱波、204 船舶散乱波、210 ターゲットセル、211 ガードセル、212 レファレンスセル、213 ヒストグラム、220 レファレンスセル、221 航跡候補、222 船舶特定領域、230 船舶推定領域、231 船舶特定領域、232 船舶候補領域、233 船舶領域、240 船舶、241 航跡、901 表示装置、902 キーボード、903 マウス、904 ドライブ装置、905 プリンタ装置、911 CPU、912 バス、913 ROM、914 RAM、915 通信装置、920 磁気ディスク装置、921 OS、922 ウィンドウシステム、923 プログラム群、924 ファイル群。
【技術分野】
【0001】
本発明は、例えば、レーダ観測により得られた画像データから船舶を探知する船舶探知装置、船舶探知プログラムおよび船舶探知装置の船舶探知方法に関するものである。
【背景技術】
【0002】
合成開口レーダ(SAR:Synthetic Aperture Radar)を用いて偏波が異なる複数の画像を一度に撮像し、偏波が異なる複数の画像それぞれに対して目標物を探知し、目標物の移動速度を推定している。
しかし、得られる結果は偏波毎に異なってしまい、結果の整合性がとれない。
そこで、目標物の探知や目標物の移動速度の推定を高精度に実施するために、散乱理論に基づいた体系的な手法が求められている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−004398号公報
【特許文献2】特開2007−114093号公報
【非特許文献】
【0004】
【非特許文献1】S.O.Rice,“Reflection of electromagnetic waves from slightly rough surfaces,”Commun.Pure Appl.Math.,vol.4,pp.351−378,1951.
【非特許文献2】Fung, A. K., Z. Li, and K. S. Chen. Backscattering from a randomly rough dilectric surface. IEEE Transactions on Geoscience and Remote Sensing, 30, 356−369, 1992
【非特許文献3】A.Ishimaru,Wave propagation and scattering in random media,NY:IEEE Press,pp.479−480,1978.
【非特許文献4】M.Sekine and Y.Mao,Weibull Radar Clutter,Peter Peregrinus,London,1990
【非特許文献5】S.Sayama and M.Sekine,“Weibull,log−Weibull and K−distributed ground clutter modeling analyzed by AIC”,IEEE Trans.Aerosp.Electron.Syst.,vol.37,pp.1108−1113,2001
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、例えば、レーダ観測により得られた画像データに基づいて船舶を高い精度で探知し、船舶の速度を高い精度で推定できるようにすることを目的とする。
【課題を解決するための手段】
【0006】
本発明の船舶探知装置は、
船舶が航行する海面に向けてレーダから出射された出射偏波の振動方向と、船舶と海面とのいずれかで散乱してレーダに入射した入射偏波の振動方向とを組み合わせた偏波組み合わせ毎に、入射偏波の強度を入射偏波の入射角に対応する画素領域に設定した画像データをレーダ画像として記憶するレーダ画像記憶部と、
偏波組み合わせ毎に、船舶で散乱してレーダに入射する船舶散乱波の推定強度を入射角に対応付けて示す船舶散乱強度データと、海面で散乱してレーダに入射する海面散乱波の推定強度を入射角に対応付けて示す海面散乱強度データとを記憶する散乱強度データ記憶部と、
偏波組み合わせ毎に、当該偏波組み合わせの船舶散乱強度データと当該偏波組み合わせの海面散乱強度データとに基づいて船舶散乱波の推定強度と海面散乱波の推定強度との比率を推定強度比として入射角に対応付けて算出し、算出した推定強度比を入射角に対応付けて示す推定強度比データを生成する推定強度比算出部と、
偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像に基づいて、複数の船舶を表示する複数の画素領域を複数の船舶推定領域として所定の船舶領域推定アルゴリズムによって算出する船舶推定領域算出部と、
偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像に基づいて、複数の航跡を表示する複数の画素領域を複数の航跡推定領域として所定の航跡領域推定アルゴリズムによって算出する航跡推定領域算出部と、
偏波組み合わせ毎に、複数の航跡推定領域に基づいて複数の船舶を表示する複数の画素領域を複数の船舶特定領域として特定する船舶特定領域算出部と、
偏波組み合わせ毎に、当該偏波組み合わせの船舶散乱強度データに示される船舶散乱波の推定強度が当該偏波組み合わせの海面散乱強度データに示される海面散乱波の推定強度より大きい入射角の範囲を船舶入射角として判定する船舶入射角判定部と、
偏波組み合わせ毎に、当該偏波組み合わせの海面散乱強度データに示される海面散乱波の推定強度が当該偏波組み合わせの船舶散乱強度データに示される船舶散乱波の推定強度より大きい入射角の範囲を海面入射角として判定する海面入射角判定部と、
偏波組み合わせ毎に、当該偏波組み合わせの複数の船舶推定領域のうち当該偏波組み合わせの船舶入射角に対応する当該レーダ画像の画素領域に含まれる船舶推定領域を船舶候補領域として抽出し、当該偏波組み合わせの複数の船舶特定領域のうち当該偏波組み合わせの海面入射角に対応する当該レーダ画像の画素領域に含まれる船舶特定領域を船舶候補領域として抽出する船舶候補領域抽出部と、
偏波組み合わせ毎に、当該偏波組み合わせの複数の船舶候補領域それぞれの領域値として当該船舶候補領域に対応する入射角の推定強度比を当該偏波組み合わせの推定強度比データから取得する船舶候補領域値取得部と、
複数の偏波組み合わせの複数の船舶候補領域のうち2つ以上の船舶候補領域が重複する重複領域に対応する二次元領域に当該2つ以上の船舶候補領域の領域値を合計した合計値を設定し、他の船舶候補領域と重複しない船舶候補領域に対応する二次元領域に当該船舶候補領域の領域値を設定した二次元のマップデータを合算マップとして生成する合算マップ生成部と、
前記合算マップ内の二次元領域のうち所定の探知閾値より大きい領域値が設定された二次元領域を船舶を表示する船舶領域として特定する船舶領域特定部とを備える。
【0007】
前記船舶探知装置は、さらに、
偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像を生成するために使用されたレーダの観測データを記憶する観測データ記憶部と、
偏波組み合わせ毎に、当該偏波組み合わせのレーダ画像に対応する観測データに基づいて、前記船舶領域に表示される船舶の速度を船舶推定速度として所定の船舶速度推定アルゴリズムによって算出する船舶推定速度算出部と、
偏波組み合わせ毎に、当該偏波組み合わせの航跡推定領域に基づいて、前記船舶領域に表示される船舶の速度を船舶航跡推定速度として所定の船舶航跡速度推定アルゴリズムによって算出する船舶航跡推定速度算出部と、
偏波組み合わせ毎に、当該偏波組み合わせの船舶入射角に対応する当該レーダ画像の画素領域に前記船舶領域が含まれる場合、前記船舶推定速度に前記船舶領域に対応する入射角の推定強度比を乗算した値を船舶強度比速度として算出し、当該偏波組み合わせの海面入射角に対応する当該レーダ画像の画素領域に前記船舶領域が含まれる場合、前記船舶航跡推定速度に前記船舶領域に対応する入射角の推定強度比を乗算した値を船舶強度比速度として算出する船舶強度比速度算出部と、
複数の偏波組み合わせの複数の船舶強度比速度を合計した船舶強度比速度の合計値を算出し、複数の船舶強度比速度を算出するために使用した複数の推定強度比を合計した推定強度比の合計値を算出し、船舶強度比速度の合計値を推定強度比の合計値で除算した値を前記船舶領域に表示される船舶の速度として算出する船舶速度算出部とを備える。
【0008】
本発明の船舶探知装置は、
船舶と海面とのいずれかで散乱してレーダに入射した電磁波の強度を電磁波の入射角に対応する画素領域に設定した画像データをレーダ画像として記憶するレーダ画像記憶部と、
船舶で散乱してレーダに入射する船舶散乱波の推定強度を入射角に対応付けて示す船舶散乱強度データと、海面で散乱してレーダに入射する海面散乱波の推定強度を入射角に対応付けて示す海面散乱強度データとを記憶する散乱強度データ記憶部と、
前記レーダ画像に基づいて、複数の船舶を表示する複数の画素領域を複数の船舶推定領域として所定の船舶領域推定アルゴリズムによって算出する船舶推定領域算出部と、
前記レーダ画像に基づいて、複数の航跡を表示する複数の画素領域を複数の航跡推定領域として所定の航跡領域推定アルゴリズムによって算出する航跡推定領域算出部と、
複数の航跡推定領域に基づいて複数の船舶を表示する複数の画素領域を複数の船舶特定領域として特定する船舶特定領域算出部と、
前記船舶散乱強度データに示される船舶散乱波の推定強度が前記海面散乱強度データに示される海面散乱波の推定強度より大きい入射角の範囲を船舶入射角として判定する船舶入射角判定部と、
前記海面散乱強度データに示される海面散乱波の推定強度が前記船舶散乱強度データに示される船舶散乱波の推定強度より大きい入射角の範囲を海面入射角として判定する海面入射角判定部と、
複数の船舶推定領域のうち前記船舶入射角に対応する前記レーダ画像の画素領域に含まれる船舶推定領域と、複数の船舶特定領域のうち前記海面入射角に対応する前記レーダ画像の画素領域に含まれる船舶特定領域とを船舶を表示する船舶領域として特定する船舶領域特定部とを備える。
【0009】
前記船舶探知装置は、さらに、
前記レーダ画像を生成するために使用されたレーダの観測データを記憶する観測データ記憶部と、
前記レーダ画像に対応する観測データに基づいて、前記船舶領域に表示される船舶の速度を船舶推定速度として所定の船舶速度推定アルゴリズムによって算出する船舶推定速度算出部と、
前記航跡推定領域に基づいて、前記船舶領域に表示される船舶の速度を船舶航跡推定速度として所定の船舶航跡速度推定アルゴリズムによって算出する船舶航跡推定速度算出部と、
前記船舶入射角に対応する前記レーダ画像の画素領域に前記船舶領域が含まれる場合、前記船舶推定速度を船舶の速度として選択し、前記海面入射角に対応する前記レーダ画像の画素領域に前記船舶領域が含まれる場合、前記船舶航跡推定速度を船舶の速度として選択する船舶速度選択部とを備える。
【0010】
本発明の船舶探知プログラムは、
船舶が航行する海面に向けてレーダから出射された出射偏波の振動方向と、船舶と海面とのいずれかで散乱してレーダに入射した入射偏波の振動方向とを組み合わせた偏波組み合わせ毎に、入射偏波の強度を入射偏波の入射角に対応する画素領域に設定した画像データをレーダ画像として記憶するレーダ画像記憶部と、
偏波組み合わせ毎に、船舶で散乱してレーダに入射する船舶散乱波の推定強度を入射角に対応付けて示す船舶散乱強度データと、海面で散乱してレーダに入射する海面散乱波の推定強度を入射角に対応付けて示す海面散乱強度データとを記憶する散乱強度データ記憶部とを用いる。
前記船舶探知プログラムは、
偏波組み合わせ毎に、当該偏波組み合わせの船舶散乱強度データと当該偏波組み合わせの海面散乱強度データとに基づいて船舶散乱波の推定強度と海面散乱波の推定強度との比率を推定強度比として入射角に対応付けて算出し、算出した推定強度比を入射角に対応付けて示す推定強度比データを生成する推定強度比算出処理と、
偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像に基づいて、複数の船舶を表示する複数の画素領域を複数の船舶推定領域として所定の船舶領域推定アルゴリズムによって算出する船舶推定領域算出処理と、
偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像に基づいて、複数の航跡を表示する複数の画素領域を複数の航跡推定領域として所定の航跡領域推定アルゴリズムによって算出する航跡推定領域算出処理と、
偏波組み合わせ毎に、複数の航跡推定領域に基づいて複数の船舶を表示する複数の画素領域を複数の船舶特定領域として特定する船舶特定領域算出処理と、
偏波組み合わせ毎に、当該偏波組み合わせの船舶散乱強度データに示される船舶散乱波の推定強度が当該偏波組み合わせの海面散乱強度データに示される海面散乱波の推定強度より大きい入射角の範囲を船舶入射角として判定する船舶入射角判定処理と、
偏波組み合わせ毎に、当該偏波組み合わせの海面散乱強度データに示される海面散乱波の推定強度が当該偏波組み合わせの船舶散乱強度データに示される船舶散乱波の推定強度より大きい入射角の範囲を海面入射角として判定する海面入射角判定処理と、
偏波組み合わせ毎に、当該偏波組み合わせの複数の船舶推定領域のうち当該偏波組み合わせの船舶入射角に対応する当該レーダ画像の画素領域に含まれる船舶推定領域を船舶候補領域として抽出し、当該偏波組み合わせの複数の船舶特定領域のうち当該偏波組み合わせの海面入射角に対応する当該レーダ画像の画素領域に含まれる船舶特定領域を船舶候補領域として抽出する船舶候補領域抽出処理と、
偏波組み合わせ毎に、当該偏波組み合わせの複数の船舶候補領域それぞれの領域値として当該船舶候補領域に対応する入射角の推定強度比を当該偏波組み合わせの推定強度比データから取得する船舶候補領域値取得処理と、
複数の偏波組み合わせの複数の船舶候補領域のうち2つ以上の船舶候補領域が重複する重複領域に対応する二次元領域に当該2つ以上の船舶候補領域の領域値を合計した合計値を設定し、他の船舶候補領域と重複しない船舶候補領域に対応する二次元領域に当該船舶候補領域の領域値を設定した二次元のマップデータを合算マップとして生成する合算マップ生成処理と、
前記合算マップ内の二次元領域のうち所定の探知閾値より大きい領域値が設定された二次元領域を船舶を表示する船舶領域として特定する船舶領域特定処理とをコンピュータに実行させる。
【0011】
前記船舶探知プログラムは、さらに、
偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像を生成するために使用されたレーダの観測データを記憶する観測データ記憶部を用いる。
前記船舶探知プログラムは、さらに、
偏波組み合わせ毎に、当該偏波組み合わせのレーダ画像に対応する観測データに基づいて、前記船舶領域に表示される船舶の速度を船舶推定速度として所定の船舶速度推定アルゴリズムによって算出する船舶推定速度算出処理と、
偏波組み合わせ毎に、当該偏波組み合わせの航跡推定領域に基づいて、前記船舶領域に表示される船舶の速度を船舶航跡推定速度として所定の船舶航跡速度推定アルゴリズムによって算出する船舶航跡推定速度算出処理と、
偏波組み合わせ毎に、当該偏波組み合わせの船舶入射角に対応する当該レーダ画像の画素領域に前記船舶領域が含まれる場合、前記船舶推定速度に前記船舶領域に対応する入射角の推定強度比を乗算した値を船舶強度比速度として算出し、当該偏波組み合わせの海面入射角に対応する当該レーダ画像の画素領域に前記船舶領域が含まれる場合、前記船舶航跡推定速度に前記船舶領域に対応する入射角の推定強度比を乗算した値を船舶強度比速度として算出する船舶強度比速度算出処理と、
複数の偏波組み合わせの複数の船舶強度比速度を合計した船舶強度比速度の合計値を算出し、複数の船舶強度比速度を算出するために使用した複数の推定強度比を合計した推定強度比の合計値を算出し、船舶強度比速度の合計値を推定強度比の合計値で除算した値を前記船舶領域に表示される船舶の速度として算出する船舶速度算出処理とをコンピュータに実行させる。
【0012】
本発明の船舶探知プログラムは、
船舶と海面とのいずれかで散乱してレーダに入射した電磁波の強度を電磁波の入射角に対応する画素領域に設定した画像データをレーダ画像として記憶するレーダ画像記憶部と、
船舶で散乱してレーダに入射する船舶散乱波の推定強度を入射角に対応付けて示す船舶散乱強度データと、海面で散乱してレーダに入射する海面散乱波の推定強度を入射角に対応付けて示す海面散乱強度データとを記憶する散乱強度データ記憶部を用いる。
前記船舶探知プログラムは、
前記レーダ画像に基づいて、複数の船舶を表示する複数の画素領域を複数の船舶推定領域として所定の船舶領域推定アルゴリズムによって算出する船舶推定領域算出処理と、
前記レーダ画像に基づいて、複数の航跡を表示する複数の画素領域を複数の航跡推定領域として所定の航跡領域推定アルゴリズムによって算出する航跡推定領域算出処理と、
複数の航跡推定領域に基づいて複数の船舶を表示する複数の画素領域を複数の船舶特定領域として特定する船舶特定領域算出処理と、
前記船舶散乱強度データに示される船舶散乱波の推定強度が前記海面散乱強度データに示される海面散乱波の推定強度より大きい入射角の範囲を船舶入射角として判定する船舶入射角判定処理と、
前記海面散乱強度データに示される海面散乱波の推定強度が前記船舶散乱強度データに示される船舶散乱波の推定強度より大きい入射角の範囲を海面入射角として判定する海面入射角判定処理と、
複数の船舶推定領域のうち前記船舶入射角に対応する前記レーダ画像の画素領域に含まれる船舶推定領域と、複数の船舶特定領域のうち前記海面入射角に対応する前記レーダ画像の画素領域に含まれる船舶特定領域とを船舶を表示する船舶領域として特定する船舶領域特定処理とをコンピュータに実行させる。
【0013】
前記船舶探知プログラムは、さらに、
前記レーダ画像を生成するために使用されたレーダの観測データを記憶する観測データ記憶部を用いる。
前記船舶探知プログラムは、さらに、
前記レーダ画像に対応する観測データに基づいて、前記船舶領域に表示される船舶の速度を船舶推定速度として所定の船舶速度推定アルゴリズムによって算出する船舶推定速度算出処理と、
前記航跡推定領域に基づいて、前記船舶領域に表示される船舶の速度を船舶航跡推定速度として所定の船舶航跡速度推定アルゴリズムによって算出する船舶航跡推定速度算出処理と、
前記船舶入射角に対応する前記レーダ画像の画素領域に前記船舶領域が含まれる場合、前記船舶推定速度を船舶の速度として選択し、前記海面入射角に対応する前記レーダ画像の画素領域に前記船舶領域が含まれる場合、前記船舶航跡推定速度を船舶の速度として選択する船舶速度選択処理とをコンピュータに実行させる。
【0014】
本発明の船舶探知装置の船舶探知方法において、
船舶探知装置は、
船舶が航行する海面に向けてレーダから出射された出射偏波の振動方向と、船舶と海面とのいずれかで散乱してレーダに入射した入射偏波の振動方向とを組み合わせた偏波組み合わせ毎に、入射偏波の強度を入射偏波の入射角に対応する画素領域に設定した画像データをレーダ画像として記憶するレーダ画像記憶部と、
偏波組み合わせ毎に、船舶で散乱してレーダに入射する船舶散乱波の推定強度を入射角に対応付けて示す船舶散乱強度データと、海面で散乱してレーダに入射する海面散乱波の推定強度を入射角に対応付けて示す海面散乱強度データとを記憶する散乱強度データ記憶部とを備える。
前記船舶探知方法において、
推定強度比算出部が、偏波組み合わせ毎に、当該偏波組み合わせの船舶散乱強度データと当該偏波組み合わせの海面散乱強度データとに基づいて船舶散乱波の推定強度と海面散乱波の推定強度との比率を推定強度比として入射角に対応付けて算出し、算出した推定強度比を入射角に対応付けて示す推定強度比データを生成し、
船舶推定領域算出部が、偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像に基づいて、複数の船舶を表示する複数の画素領域を複数の船舶推定領域として所定の船舶領域推定アルゴリズムによって算出し、
航跡推定領域算出部が、偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像に基づいて、複数の航跡を表示する複数の画素領域を複数の航跡推定領域として所定の航跡領域推定アルゴリズムによって算出し、
船舶特定領域算出部が、偏波組み合わせ毎に、複数の航跡推定領域に基づいて複数の船舶を表示する複数の画素領域を複数の船舶特定領域として特定し、
船舶入射角判定部が、偏波組み合わせ毎に、当該偏波組み合わせの船舶散乱強度データに示される船舶散乱波の推定強度が当該偏波組み合わせの海面散乱強度データに示される海面散乱波の推定強度より大きい入射角の範囲を船舶入射角として判定し、
海面入射角判定部が、偏波組み合わせ毎に、当該偏波組み合わせの海面散乱強度データに示される海面散乱波の推定強度が当該偏波組み合わせの船舶散乱強度データに示される船舶散乱波の推定強度より大きい入射角の範囲を海面入射角として判定し、
船舶候補領域抽出部が、偏波組み合わせ毎に、当該偏波組み合わせの複数の船舶推定領域のうち当該偏波組み合わせの船舶入射角に対応する当該レーダ画像の画素領域に含まれる船舶推定領域を船舶候補領域として抽出し、当該偏波組み合わせの複数の船舶特定領域のうち当該偏波組み合わせの海面入射角に対応する当該レーダ画像の画素領域に含まれる船舶特定領域を船舶候補領域として抽出し、
船舶候補領域値取得部が、偏波組み合わせ毎に、当該偏波組み合わせの複数の船舶候補領域それぞれの領域値として当該船舶候補領域に対応する入射角の推定強度比を当該偏波組み合わせの推定強度比データから取得し、
合算マップ生成部が、複数の偏波組み合わせの複数の船舶候補領域のうち2つ以上の船舶候補領域が重複する重複領域に対応する二次元領域に当該2つ以上の船舶候補領域の領域値を合計した合計値を設定し、他の船舶候補領域と重複しない船舶候補領域に対応する二次元領域に当該船舶候補領域の領域値を設定した二次元のマップデータを合算マップとして生成し、
船舶領域特定部が、前記合算マップ内の二次元領域のうち所定の探知閾値より大きい領域値が設定された二次元領域を船舶を表示する船舶領域として特定する。
【0015】
本発明の船舶探知装置の船舶探知方法において、
船舶探知装置は、
船舶と海面とのいずれかで散乱してレーダに入射した電磁波の強度を電磁波の入射角に対応する画素領域に設定した画像データをレーダ画像として記憶するレーダ画像記憶部と、
船舶で散乱してレーダに入射する船舶散乱波の推定強度を入射角に対応付けて示す船舶散乱強度データと、海面で散乱してレーダに入射する海面散乱波の推定強度を入射角に対応付けて示す海面散乱強度データとを記憶する散乱強度データ記憶部とを備える。
前記船舶探知方法において、
船舶推定領域算出部が、前記レーダ画像に基づいて、複数の船舶を表示する複数の画素領域を複数の船舶推定領域として所定の船舶領域推定アルゴリズムによって算出し、
航跡推定領域算出部が、前記レーダ画像に基づいて、複数の航跡を表示する複数の画素領域を複数の航跡推定領域として所定の航跡領域推定アルゴリズムによって算出し、
船舶特定領域算出部が、複数の航跡推定領域に基づいて複数の船舶を表示する複数の画素領域を複数の船舶特定領域として特定し、
船舶入射角判定部が、前記船舶散乱強度データに示される船舶散乱波の推定強度が前記海面散乱強度データに示される海面散乱波の推定強度より大きい入射角の範囲を船舶入射角として判定し、
海面入射角判定部が、前記海面散乱強度データに示される海面散乱波の推定強度が前記船舶散乱強度データに示される船舶散乱波の推定強度より大きい入射角の範囲を海面入射角として判定し、
船舶領域特定部が、複数の船舶推定領域のうち前記船舶入射角に対応する前記レーダ画像の画素領域に含まれる船舶推定領域と、複数の船舶特定領域のうち前記海面入射角に対応する前記レーダ画像の画素領域に含まれる船舶特定領域とを船舶を表示する船舶領域として特定する。
【発明の効果】
【0016】
本発明によれば、例えば、偏波組み合わせが異なる複数のレーダ画像に基づいて船舶を高い精度で探知することができる。
【図面の簡単な説明】
【0017】
【図1】実施の形態1におけるレーダ観測を示す図。
【図2】実施の形態1における船舶探知装置100の機能構成図。
【図3】実施の形態1における船舶探知装置100の船舶探知方法を示すフローチャート。
【図4】実施の形態1におけるシミュレーション対象の海面散乱波203および船舶散乱波204を示す図。
【図5】実施の形態1における船舶散乱強度データ192と海面散乱強度データ193とSC比データ194とを示す図。
【図6】CFAR方式による目標物検出方法を示す概要図。
【図7】ウエーキ方式による航跡検出方法を示す概要図。
【図8】実施の形態1におけるSC比マップ生成処理(S130)を示すフローチャート。
【図9】実施の形態1におけるSC比マップ生成処理(S130)の概要図。
【図10】実施の形態1におけるSC比マップ生成処理(S130)の概要図。
【図11】実施の形態1におけるSC比合算マップ生成処理(S140)を示すフローチャート。
【図12】実施の形態1におけるSC比合算マップ198の概要図。
【図13】実施の形態1における船舶探知データ199の概要図。
【図14】実施の形態1における船舶探知装置100のハードウェア資源の一例を示す図。
【図15】実施の形態2における船舶探知装置100の機能構成図。
【図16】実施の形態2における船舶探知方法を示すフローチャート。
【図17】ドップラーシフト方式による速度推定方法を示す概要図。
【図18】実施の形態2における船舶速度算出処理(S170)を示すフローチャート。
【図19】実施の形態2における船舶速度算出処理(S170)の概要図。
【図20】実施の形態2における船舶速度算出処理(S170)の概要図。
【図21】実施の形態3における船舶探知装置100の機能構成図。
【図22】実施の形態3における船舶探知方法を示すフローチャート。
【図23】実施の形態3における船舶領域特定処理(S210)を示すフローチャート。
【図24】実施の形態4における船舶探知装置100の機能構成図。
【図25】実施の形態4における船舶探知方法を示すフローチャート。
【図26】実施の形態4における船舶速度選択処理(S220)を示すフローチャート。
【発明を実施するための形態】
【0018】
実施の形態1.
観測地域を異なる偏波を用いてレーダ観測して得られる複数のレーダ画像に基づいて、観測地域に存在する船舶を探知する形態について説明する。
【0019】
図1は、実施の形態1におけるレーダ観測を示す図である。
実施の形態1におけるレーダ観測について、図1に基づいて説明する。
【0020】
レーダ200は、人工衛星、航空機その他の飛行体に搭載され、アクティブ方式で観測地域を観測する観測装置である。
アクティブ方式とは、電磁波を観測地域に向けて照射し、観測地域で反射して後方散乱した電磁波を入射し、入射した電磁波の強度を計測する方式である。
【0021】
例えば、合成開口レーダ(SAR:Synthetic Aperture Radar)はレーダ200の一例である。
【0022】
レーダ200の進行方向を「アジマス方向」といい、電磁波の入射方向の水平成分を「レンジ方向」という。また、電磁波の入射方向と鉛直方向とが成す角度を「入射角(またはオフナディア角)」という。
【0023】
以下、レーダ200で計測された電磁波の入射強度を画素値として示す画像データを「レーダ画像」という。
レーダ画像は、アジマス方向(u座標)とレンジ方向(v座標)との二次元で観測地域を表示する。レーダ画像において、レンジ方向の座標値が小さいほど入射角が小さく、レンジ方向の座標値が大きいほど入射角が大きい。
【0024】
また、レーダ200が観測地域へ出射する偏波の振動方向と、観測地域で後方散乱してレーダ200に入射した偏波の振動方向との組み合わせを「偏波組み合わせ」という。
偏波とは、特定の振動方向(水平方向、垂直方向など)に振動する電磁波のことである。
【0025】
例えば、偏波組み合わせとして、「HH」(またはHHHHと記す)、「HV」(またはHVHVと記す)、「VV」(またはVVVVと記す)、「HHVV」、「HHHV」、「HVVV」などの組み合わせが存在する。
「H」は水平方向の偏波を示し、「V」は垂直方向の偏波を示す。
偏波組み合わせを二文字で表した場合、1文字目が出射した偏波を示し、2文字目が入射した偏波を示す。
偏波組み合わせを四文字で表した場合、1、2文字目が出射した2つの偏波を示し、3、4文字目が入射した2つの偏波を示す。
【0026】
図2は、実施の形態1における船舶探知装置100の機能構成図である。
実施の形態1における船舶探知装置100の機能構成について、図2に基づいて説明する。
【0027】
船舶探知装置100は、装置記憶部190を備える。
【0028】
装置記憶部190(レーダ画像記憶部、散乱強度データ記憶部の一例)は、船舶探知装置100で使用される各種データ(符号「191」〜「199」を付したデータなど)を記憶装置を用いて記憶する。符号の末尾に「a〜N」を付したデータは偏波組み合わせが異なる複数のデータを意味する。
【0029】
例えば、装置記憶部190は、出射偏波の振動方向と入射偏波の振動方向とを組み合わせた偏波組み合わせ毎に、入射偏波の強度を入射偏波の入射角に対応する画素領域に設定した画像データをレーダ画像191として記憶する。出射偏波とは、船舶が航行する海面に向けてレーダ200から出射された電磁波である。入射偏波とは、船舶と海面とのいずれかで散乱してレーダ200に入射した電磁波である。
また、装置記憶部190は、偏波組み合わせ毎に、船舶散乱波の推定強度を入射角に対応付けて示す船舶散乱強度データ192と、海面散乱波の推定強度を入射角に対応付けて示す海面散乱強度データ193とを記憶する。船舶散乱波とは、船舶で散乱してレーダ200に入射する電磁波である。海面散乱波とは、海面で散乱してレーダ200に入射する電磁波である。
【0030】
さらに、船舶探知装置100は、シミュレーション部110とSC比算出部111とを備える。
【0031】
シミュレーション部110は、偏波組み合わせ毎に、当該偏波組み合わせの船舶散乱波の推定強度を入射角に対応付けて所定の船舶散乱強度推定アルゴリズムによって算出する。シミュレーション部110は、偏波組み合わせ毎に、算出した船舶散乱波の推定強度を入射角に対応付けて示す船舶散乱強度データ192を生成する。
シミュレーション部110は、偏波組み合わせ毎に、当該偏波組み合わせの海面散乱波の推定強度を入射角に対応付けて所定の海面散乱強度推定アルゴリズムによって算出する。シミュレーション部110は、偏波組み合わせ毎に、算出した海面散乱波の推定強度を入射角に対応付けて示す海面散乱強度データ193を生成する。
【0032】
SC比算出部111(推定強度比算出部の一例)は、偏波組み合わせ毎に、当該偏波組み合わせの船舶散乱強度データ192と当該偏波組み合わせの海面散乱強度データ193とに基づいて船舶散乱波の推定強度と海面散乱波の推定強度との比率をSC比(推定強度比の一例)として入射角に対応付けて算出する。SC比算出部111は、偏波組み合わせ毎に、算出したSC比を入射角に対応付けて示すSC比データ194(推定強度比データの一例)を生成する。
【0033】
さらに、船舶探知装置100は、CFAR方式演算部120とウエーキ方式演算部121とを備える。
【0034】
CFAR方式演算部120(船舶推定領域算出部の一例)は、偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像191に基づいて、複数の船舶を表示する複数の画素領域を複数の船舶推定領域としてCFAR方式(船舶領域推定アルゴリズムの一例)によって算出する。
【0035】
ウエーキ方式演算部121(航跡推定領域算出部、船舶特定領域算出部の一例)は、偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像191に基づいて、複数の航跡を表示する複数の画素領域を複数の航跡推定領域としてウエーキ方式(航跡領域推定アルゴリズムの一例)によって算出する。
ウエーキ方式演算部121は、偏波組み合わせ毎に、複数の航跡推定領域に基づいて複数の船舶を表示する複数の画素領域を複数の船舶特定領域として特定する。
【0036】
さらに、船舶探知装置100は、SC比マップ生成部130とSC比合算マップ生成部140とを備える。
【0037】
SC比マップ生成部130(船舶入射角判定部、海面入射角判定部の一例)は、偏波組み合わせ毎に、当該偏波組み合わせの船舶散乱強度データ192に示される船舶散乱波の推定強度が当該偏波組み合わせの海面散乱強度データ193に示される海面散乱波の推定強度より大きい入射角の範囲(SC比>0)を船舶入射角として判定する。
SC比マップ生成部130は、偏波組み合わせ毎に、当該偏波組み合わせの海面散乱強度データ193に示される海面散乱波の推定強度が当該偏波組み合わせの船舶散乱強度データ192に示される船舶散乱波の推定強度より大きい入射角の範囲(SC比<0)を海面入射角として判定する。
【0038】
SC比マップ生成部130(船舶候補領域抽出部、船舶候補領域値取得部の一例)は、偏波組み合わせ毎に、当該偏波組み合わせの複数の船舶推定領域のうち当該偏波組み合わせの船舶入射角に対応する当該レーダ画像191の画素領域に含まれる船舶推定領域を船舶候補領域として抽出する。
SC比マップ生成部130は、偏波組み合わせ毎に、当該偏波組み合わせの複数の船舶特定領域のうち当該偏波組み合わせの海面入射角に対応する当該レーダ画像191の画素領域に含まれる船舶特定領域を船舶候補領域として抽出する。
SC比マップ生成部130は、偏波組み合わせ毎に、当該偏波組み合わせの複数の船舶候補領域それぞれの領域値として当該船舶候補領域に対応する入射角のSC比を当該偏波組み合わせのSC比データ194から取得する。
【0039】
SC比合算マップ生成部140(合算マップ生成部の一例)は、SC比合算マップ198(二次元のマップデータの一例)を生成する。
SC比合算マップ198は、複数の偏波組み合わせの複数の船舶候補領域のうち2つ以上の船舶候補領域が重複する重複領域に対応する二次元領域に当該2つ以上の船舶候補領域の領域値を合計した合計値を設定したマップデータである。
また、SC比合算マップ198は、他の船舶候補領域と重複しない船舶候補領域に対応する二次元領域に当該船舶候補領域の領域値を設定したマップデータである。
【0040】
さらに、船舶探知装置100は、船舶探知部150を備える。
船舶探知部150(船舶領域特定部の一例)は、SC比合算マップ198内の二次元領域のうち所定の探知閾値より大きい領域値が設定された二次元領域を船舶を表示する船舶領域として特定する。
【0041】
図3は、実施の形態1における船舶探知装置100の船舶探知方法を示すフローチャートである。
実施の形態1における船舶探知方法の処理の流れについて、図3に基づいて説明する。
【0042】
まず、船舶探知方法の処理の概要について説明する。
シミュレーション部110は、偏波組み合わせ毎に、船舶で後方散乱する船舶散乱波の強度と海面で後方散乱する海面散乱波の強度とを算出する(S110)。
SC比算出部111は、偏波組み合わせ毎に、船舶散乱強度と海面散乱強度との強度比(SC比)を算出する(S111)。
CFAR方式演算部120は、偏波組み合わせ毎に、船舶が表示されたレーダ画像191の画素領域を船舶推定領域としてCFAR方式で特定する(S120)。
ウエーキ方式演算部121は、偏波組み合わせ毎に、船舶が表示されたレーダ画像191の画素領域を船舶特定領域としてウエーキ方式で特定する(S121)。
SC比マップ生成部130は、偏波組み合わせ毎に、船舶候補領域(船舶推定領域、船舶特定領域の一部)に対応する画素領域にSC比を設定してSC比マップ197を生成する(S130)。
SC比合算マップ生成部140は、偏波組み合わせが異なる複数のSC比マップ197a〜Nを合算してSC比合算マップ198を生成する(S140)。
船舶探知部150は、SC比合算マップ198の設定値に基づいて、船舶が表示されたレーダ画像191の画素領域を船舶領域として特定する(S150)。
【0043】
次に、船舶探知方法の処理の詳細について説明する。
【0044】
S110において、シミュレーション部110は、偏波組み合わせ毎に、船舶で後方散乱する船舶散乱波の強度を所定のシミュレーション方法によって算出する。
さらに、シミュレーション部110は、偏波組み合わせ毎に、海面で後方散乱する海面散乱波の強度を所定のシミュレーション方法によって算出する。
【0045】
図4は、実施の形態1におけるシミュレーション対象の海面散乱波203および船舶散乱波204を示す図である。
実施の形態1における海面散乱波203および船舶散乱波204のシミュレーションについて、図4に基づいて説明する。
【0046】
例えば、シミュレーション部110は、SPM(Small Perturbation Model)またはIEM(Integral Equation Model)を用いて、海面201をシミュレーションする。SPMについては非特許文献1に開示され、IEMについては非特許文献2に開示されている。
シミュレーション部110は、シミュレーションした海面201に基づいて、海面201で後方散乱する海面散乱波203だけがレーダ200に入射した場合(図4(1))の入射強度を入射角θ(例えば0度〜90度)に対応付けて算出する。
【0047】
例えば、シミュレーション部110は、Kirchhoff Modelを用いて、船舶202の表面をシミュレーションする。Kirchhoff Modelについては非特許文献3に開示されている。
シミュレーション部110は、シミュレーションした船舶202の表面に基づいて、海面201で反射した後に船舶202で後方散乱する船舶散乱波204だけがレーダ200に入射した場合(図4(2))の入射強度を入射角θに対応付けて算出する。
【0048】
以下、船舶散乱波204の入射強度を「船舶散乱強度」といい、海面散乱波203の入射強度を「海面散乱強度」という。
また、船舶散乱強度と入射角θとを対応付けて設定したデータを「船舶散乱強度データ192」といい、海面散乱強度と入射角θとを対応付けて設定したデータを「海面散乱強度データ193」という。
シミュレーション部110は、船舶散乱強度データ192と海面散乱強度データ193とを生成する。
【0049】
図5は、実施の形態1における船舶散乱強度データ192と海面散乱強度データ193とSC比データ194とを示す図である。
図5(1)の船舶散乱強度データ192において、船舶散乱強度は、入射角が小さいほど小さく、入射角が大きいほど大きい。
また、図5(1)の海面散乱強度データ193において、海面散乱強度は、入射角が小さいほど大きく、入射角が大きいほど小さい。
但し、船舶散乱強度と入射角との関係、海面散乱強度と入射角との関係、船舶散乱強度と海面散乱強度との大小関係は、偏波組み合わせによって異なる。つまり、船舶散乱強度データ192および海面散乱強度データ193は偏波組み合わせによって異なる。
【0050】
図3に戻り、S111から説明を続ける。
【0051】
S111において、SC比算出部111は、偏波組み合わせ毎に、当該偏波組み合わせの船舶散乱強度データ192と海面散乱強度データ193とに基づいてSC(Signal−Clutter)比を算出し、算出したSC比を示すSC比データ194を生成する。
【0052】
SC比とは、船舶散乱強度(Signal)と海面散乱強度(Clutter)との比を表す値である。
SC比データ194は、SC比と入射角とを対応付けて設定したデータである。
【0053】
以下、SC比算出部111は、海面散乱強度に対する船舶散乱強度の比の対数値をSC比として算出するものとする。船舶散乱強度を「S」とし、海面散乱強度を「C」とすると、対数値は「10log10(S/C)」(単位:デシベル)で表される。
この場合、図5(2)に示すように、船舶散乱強度が海面散乱強度より小さい入射角に対応するSC比は負の値になり、船舶散乱強度が海面散乱強度より大きい入射角に対応するSC比は正の値になる。
【0054】
図3に戻り、S120から説明を続ける。
【0055】
S120において、CFAR方式演算部120は、偏波組み合わせ毎に、当該偏波組み合わせのレーダ画像191をCFAR(Constant False Alarm Rate)方式で処理し、CFAR方式マップ195を生成する。
CFAR方式とは、目標物(例えば、船舶)が表示された画素領域を検出する方式である。
【0056】
以下、CFAR方式で検出された画素領域を「船舶推定領域」という。
CFAR方式マップ195は、船舶推定領域に「1」を設定し、船舶推定領域以外の領域に「0」を設定した二次元のマップデータ(画像データ)である。つまり、CFAR方式マップ195は船舶推定領域を示す。
【0057】
図6は、CFAR方式による目標物検出方法を示す概要図である。
CFAR方式による目標物検出方法について、図6に基づいて説明する。
【0058】
CFAR方式において、レーダ画像191の画素毎(または複数画素から成る画素領域毎)に以下の処理を行う。
(1)レーダ画像191から画素(または画素領域)をターゲットセル210として選択し、ターゲットセル210に対するレファレンスセル212をレーダ画像191から抽出する。レファレンスセル212とはガードセル211の周囲にある画素領域であり、ガードセル211とはターゲットセル210の周囲にある画素領域である。
(2)レファレンスセル212の画素値の分布を示すヒストグラム213に基づいて、レファレンスセル212の標準偏差sおよび平均値mを算出し、平均値mに標準偏差sの定数N倍を加算した値を閾値Tとして算出する。
そして、ターゲットセル210の画素値と閾値Tとを比較し、画素値が閾値Tより大きいターゲットセル210を目標物(例えば、船舶)が表示された画素(または画素領域)として検出する。
【0059】
CFAR方式の詳細については、非特許文献4および非特許文献5に開示されている。
【0060】
図3に戻り、S121から説明を続ける。
【0061】
S121において、ウエーキ方式演算部121は、偏波組み合わせ毎に、当該偏波組み合わせのレーダ画像191をウエーキ方式(航跡検出方式)で処理する。
ウエーキ方式とは、航跡(ウエーキ)が表示された画素領域を検出する方式である。
以下、ウエーキ方式で算出された画素領域を「航跡推定領域」という。
【0062】
さらに、ウエーキ方式演算部121は、航跡推定領域毎に、当該航跡推定領域に基づいて船舶が表示された画素領域を特定する。
以下、航跡推定領域に基づいて特定された画素領域を「船舶特定領域」という。
【0063】
そして、ウエーキ方式演算部121は、偏波組み合わせ毎に、船舶特定領域を示すウエーキ方式マップ196を生成する。
【0064】
ウエーキ方式マップ196は、船舶特定領域に「1」を設定し、船舶特定領域以外の領域に「0」を設定した二次元のマップデータ(画像データ)である。
【0065】
図7は、ウエーキ方式による航跡検出方法を示す概要図である。
ウエーキ方式による航跡検出方法について、図7に基づいて説明する。
【0066】
ウエーキ方式において、レーダ画像191の画素領域毎に以下の処理を行う。
レーダ画像191から所定の大きさの画素領域をレファレンスセル220として選択する。
次に、レファレンスセル220の中心を回転軸にして疑似直線を回転させ、疑似直線上に並ぶ複数画素を航跡候補221として順に抽出し、抽出した航跡候補221毎に当該航跡候補221の画素値の合計(合計画素値)を算出する。
次に、航跡候補221毎に当該航跡候補221の合計画素値を所定の明部閾値および所定の暗部閾値と比較する。明部閾値はレーダ画像191に明るく表示される航跡(レーダ200から見て航跡の波の手前側)を検出するための閾値であり、暗部閾値はレーダ画像191に暗く表示される航跡(レーダ200から見て航跡の波の影になる部分)を検出するための閾値である。
そして、合計画素値が明部閾値以上または暗部閾値以下である航跡候補221を航跡が表示された画素領域として検出する。
【0067】
ウエーキ方式の詳細については、特許文献1に開示されている。
【0068】
以下、ウエーキ方式演算部121は、ウエーキ方式で検出した画素領域(航跡推定領域)を船舶特定領域として特定するものとする。
但し、ウエーキ方式演算部121は、航跡推定領域の一端部または両端部に位置する所定の大きさの画素領域を船舶特定領域222として特定しても構わない。
【0069】
図3に戻り、S130から説明を続ける。
【0070】
S130において、SC比マップ生成部130は、偏波組み合わせ毎に、当該偏波組み合わせのCFAR方式マップ195、ウエーキ方式マップ196およびSC比データ194に基づいてSC比マップ197を生成する。
SC比マップ197は、船舶散乱強度と海面散乱強度との大小関係に基づいて選択された船舶推定領域および船舶特定領域にSC比を設定した二次元のマップデータ(画像データ)である。
【0071】
図8は、実施の形態1におけるSC比マップ生成処理(S130)を示すフローチャートである。
実施の形態1におけるSC比マップ生成処理(S130)について、図8に基づいて説明する。
【0072】
S131において、SC比マップ生成部130は未選択の偏波組み合わせを選択する。以下、S131で選択した偏波組み合わせを「選択組み合わせ」という。
S131の後、S132に進む。
【0073】
S132において、SC比マップ生成部130は選択組み合わせのレーダ画像191に対応する入射角の範囲から未選択の入射角を選択する。
例えば、レーダ画像191が20度から80度の入射角の範囲で観測地域を表示した画像であれば、SC比マップ生成部130は20度から80度まで順に入射角を選択する。
以下、S132で選択した入射角を「選択角」という。
S132の後、S133に進む。
【0074】
S133において、SC比マップ生成部130は、選択組み合わせのSC比データ194から選択角のSC比を取得する。以下、S133で取得したSC比を「対象SC比」という。
S133の後、S134に進む。
【0075】
S134において、SC比マップ生成部130は対象SC比の正負を判定する。
対象SC比が正の場合にはS134aに進み、対象SC比が負の場合にはS134bに進む。
また、対象SC比がゼロの場合にはS134aとS134bとのうち所定のいずれかに進む。
【0076】
S134aにおいて、SC比マップ生成部130は、選択組み合わせのCFAR方式マップ195から選択角に対応する画素行を抽出する。以下、S134aで抽出した画素行を「抽出行」という。
S134aの後、S135に進む。
【0077】
S134bにおいて、SC比マップ生成部130は、選択組み合わせのウエーキ方式マップ196から選択角に対応する画素行を抽出する。以下、S134bで抽出した画素行を「抽出行」という。
S134bの後、S135に進む。
【0078】
S135において、SC比マップ生成部130は、選択組み合わせのSC比マップ197に抽出行を設定する。
S135の後、S136に進む。
【0079】
S136において、SC比マップ生成部130は、SC比マップ197の抽出行内の画素毎に、当該画素の画素値に対象SC比の絶対値を乗算し、乗算して得られた値を当該画素に画素値として設定する。
S136の後、S137に進む。
【0080】
S137において、SC比マップ生成部130は、未選択の入射角が残っているか否かを判定する。
未選択の入射角が残っている場合(YES)、S132に戻る。
全ての入射角を選択済みの場合(NO)、S138に進む。
【0081】
S138において、SC比マップ生成部130は、未選択の偏波組み合わせが残っているか否かを判定する。
未選択の偏波組み合わせが残っている場合(YES)、S131に戻る。
全ての偏波組み合わせを選択済みの場合(NO)、SC比マップ生成処理(S130)は終了する。
【0082】
図9、図10は、実施の形態1におけるSC比マップ生成処理(S130)の概要図である。
実施の形態1におけるSC比マップ生成処理(S130)の概要について、図9と図10とに基づいて説明する。
【0083】
図9、図10において、CFAR方式マップ195、ウエーキ方式マップ196およびSC比マップ197は、レンジ方向の座標値vが小さいほど入射角が小さく、レンジ方向の座標値vが大きいほど入射角が大きい。
【0084】
図9のSC比データ194において、SC比が負の入射角(0度以上35度未満)では、船舶散乱強度より海面散乱強度の方が大きいため(海面支配的)、レーダ画像191から検出した海面の航跡に基づいた船舶特定領域231を示すウエーキ方式マップ196を選択する(S134、S134b)。
一方、SC比が正またはゼロの入射角(35度以上90度未満)では、海面散乱強度よりも船舶散乱強度の方が大きいため(船舶支配的)、レーダ画像191から検出した船舶推定領域230を示すCFAR方式マップ195を選択する(S134、S134a)。
【0085】
CFAR方式マップ195およびウエーキ方式マップ196は、船舶推定領域230または船舶特定領域231(図中の丸印)に「1」を設定し、その他の領域に「0」を設定した二次元のマップデータ(画像データ)である。
【0086】
図10において、CFAR方式マップ195から選択した斜線の領域とウエーキ方式マップ196から選択した斜線の領域とから成るSC比マップ197に対して入射角毎にSC比の絶対値を乗じることにより(S135、S136)、船舶候補領域232にSC比の絶対値を設定することができる。つまり、SC比マップ197は船舶候補領域232のSC比の絶対値を示す。例えば、入射角が30度の船舶候補領域232には30度の入射角に対応するSC比の絶対値が設定され、入射角が40度の船舶候補領域232には40度の入射角に対応するSC比の絶対値が設定される。
船舶候補領域232とは、CFAR方式マップ195から選択された領域に含まれる船舶推定領域とウエーキ方式マップ196から選択された領域に含まれる船舶特定領域とを意味する。
【0087】
図3に戻り、S140から説明を続ける。
【0088】
S140において、SC比合算マップ生成部140は、複数の偏波組み合わせそれぞれのSC比マップ197を合算してSC比合算マップ198を生成する。
SC比合算マップ198は、複数のSC比合算マップ198それぞれに設定されている船舶候補領域のSC比(の絶対値)を合計した値を領域毎に設定した二次元のマップデータ(画像データ)である。
【0089】
図11は、実施の形態1におけるSC比合算マップ生成処理(S140)を示すフローチャートである。
実施の形態1におけるSC比合算マップ生成処理(S140)について、図11に基づいて説明する。
【0090】
S141において、SC比合算マップ生成部140は複数の偏波組み合わせから偏波組み合わせを一つ選択し、選択した偏波組み合わせのSC比マップ197を複製する。
以下、SC比マップ197の複製を「SC比合算マップ198」という。
S141の後、S142に進む。
【0091】
S142において、SC比合算マップ生成部140は未選択の偏波組み合わせを選択する。以下、S142で選択した偏波組み合わせを「選択組み合わせ」という。
S142の後、S143に進む。
【0092】
S143において、SC比合算マップ生成部140は、選択組み合わせのSC比マップ197から未選択の画素を選択する。以下、S143で選択した画素を「選択画素」という。
S143の後、S144に進む。
【0093】
S144において、SC比合算マップ生成部140は、選択画素のuv座標と一致(または対応)するSC比合算マップ198の画素に選択画素の画素値を加算する。
S144の後、S145に進む。
【0094】
S145において、SC比合算マップ生成部140は、SC比マップ197に未選択の画素が残っているか否かを判定する。
未選択の画素が残っている場合(YES)、S143に戻る。
全ての画素を選択した場合(NO)、S146に進む。
【0095】
S146において、SC比合算マップ生成部140は、S141とS142とのいずれにおいても選択されていない未選択の偏波組み合わせが残っているか否かを判定する。
未選択の偏波組み合わせが残っている場合(YES)、S142に戻る。
全ての偏波組み合わせを選択した場合(NO)、SC比合算マップ生成処理(S140)は終了する。
【0096】
図12は、実施の形態1におけるSC比合算マップ198の概要図である。
実施の形態1におけるSC比合算マップ198の概要について、図12に基づいて説明する。
【0097】
例えば、「HH」「HV」「VV」の3通りを偏波組み合わせとする。
【0098】
「HH」のSC比マップ197aは、(0,0)−(9,9)の船舶候補領域232にSC比「20」が設定されている。
「HV」のSC比マップ197bは、(5,0)−(14,9)の船舶候補領域232にSC比「10」が設定されている。
「VV」のSC比マップ197cは、(10,10)−(19,19)の船舶候補領域232にSC比「15」が設定されている。
【0099】
SC比合算マップ198は、(0,0)−(4,9)の領域にSC比「20」が設定され、(5,0)−(9,9)の領域にSC比「30(=20+10)」が設定され、(10,0)−(14,9)の領域にSC比「10」が設定される。
また、SC比合算マップ198は、(10,10)−(19,19)の領域にSC比「15」が設定される。
【0100】
つまり、SC比合算マップ198は、船舶候補領域232が重複する領域ほど設定値が大きく、また、SC比が大きい船舶候補領域232ほど設定値が大きい。
【0101】
図3に戻り、S150から説明を続ける。
【0102】
S150において、船舶探知部150は、SC比合算マップ198の画素毎に当該画素の設定値を所定の探知閾値と比較し、探知閾値以上の値が設定されているSC比合算マップ198の画素領域を特定する。
そして、船舶探知部150は、特定した画素領域とuv座標が一致(または対応)するレーダ画像191の画素領域を船舶領域として特定する。船舶領域とは、船舶が表示された画素領域のことである。
【0103】
さらに、船舶探知部150は、船舶領域に対応する現実の座標値(例えば、緯度と経度)を船舶が存在した場所の座標値として算出し、船舶探知データ199を生成する。
船舶探知データ199は、探知した船舶毎に、船舶領域のuv座標値と現実の座標値とを示したデータである。
【0104】
例えば、レーダ画像191の画素毎にレーダ200によって電磁波の入射強度を観測した観測時刻、レーダ200によって観測された電磁波の入射角、レーダ200の飛行位置の座標値(例えば、緯度、経度、高度)などを含んだレーダ観測情報を装置記憶部190に予め記憶しておく。
船舶探知部150は、レーダ画像191の船舶領域の入射強度を観測した観測時刻をレーダ観測情報から取得し、観測時刻のレーダ200の座標値と観測時刻の電磁波の入射角をレーダ観測情報から取得する。そして、船舶探知部150は、レーダ200の座標値を通る入射角方向のベクトルを算出し、観測地域の海面を表す平面を算出し、算出したベクトルと平面との交点の座標値を船舶の座標値として算出する。
また、レーダ画像191の画素に対応付けて観測地域の座標値を示す画像座標データを装置記憶部190に予め記憶しておいてもよい。この場合、船舶探知部150は、レーダ画像191の船舶領域に対応付けられた座標値を船舶の座標値として画像座標値データから取得する。
【0105】
S150により、船舶探知方法の処理は終了する。
【0106】
図13は、実施の形態1における船舶探知データ199の概要図である。
実施の形態1における船舶探知データ199の概要について、図13に基づいて説明する。
【0107】
船舶探知データ199は、偏波組み合わせが異なる複数のSC比マップ197を合算して生成したSC比合算マップ198から設定値(SC比の合計値)が大きい領域を船舶領域233として抽出したデータである。
【0108】
図14は、実施の形態1における船舶探知装置100のハードウェア資源の一例を示す図である。
図14において、船舶探知装置100は、CPU911(Central・Processing・Unit)(マイクロプロセッサ、マイクロコンピュータともいう)を備えている。CPU911は、バス912を介してROM913、RAM914、通信装置915、表示装置901、キーボード902、マウス903、ドライブ装置904、プリンタ装置905、磁気ディスク装置920と接続され、これらのハードウェアデバイスを制御する。ドライブ装置904は、FD(Flexible・Disk・Drive)、CD(Compact Disc)、DVD(Digital・Versatile・Disc)などの記憶媒体を読み書きする装置である。
【0109】
通信装置915は、有線または無線で、LAN(Local Area Network)、インターネット、電話回線などの通信網に接続している。
【0110】
磁気ディスク装置920には、OS921(オペレーティングシステム)、ウィンドウシステム922、プログラム群923、ファイル群924が記憶されている。
【0111】
プログラム群923には、実施の形態において「〜部」として説明する機能を実行するプログラムが含まれる。プログラムは、CPU911により読み出され実行される。すなわち、船舶探知プログラムは、「〜部」としてコンピュータを機能させるものであり、また「〜部」の手順や方法をコンピュータに実行させるものである。
【0112】
ファイル群924には、実施の形態において説明する「〜部」で使用される各種データ(入力、出力、判定結果、計算結果、処理結果など)が含まれる。
【0113】
実施の形態において構成図およびフローチャートに含まれている矢印は主としてデータや信号の入出力を示す。
【0114】
実施の形態において「〜部」として説明するものは「〜回路」、「〜装置」、「〜機器」であってもよく、また「〜ステップ」、「〜手順」、「〜処理」であってもよい。すなわち、「〜部」として説明するものは、ファームウェア、ソフトウェア、ハードウェアまたはこれらの組み合わせのいずれで実装されても構わない。
【0115】
実施の形態1では、SC比の正負に基づいてCFAR方式マップ195とウエーキ方式マップ196とのいずれを選択するか判定した(図8、S134)。
但し、船舶散乱強度データ192と海面散乱強度データ193とを比較して判定しても構わない。この場合、船舶散乱強度が海面散乱強度より大きければCFAR方式マップ195を選択し、海面散乱強度が船舶散乱強度より大きければウエーキ方式マップ196を選択する。
【0116】
また、海面散乱強度(C)に対する船舶散乱強度(S)の対数値「10log10(S/C)」をSC比としてSC比マップ197を生成した(図8、S136)。
但し、対数値ではなく真値のSC比を用いてSC比マップ197を生成しても構わない。この場合、船舶散乱強度が海面散乱強度より大きければ「S/C」をSC比として用い、海面散乱強度が船舶散乱強度より大きければ「C/S」をSC比として用いる。
【0117】
また、上記のCFAR方式以外の方式で船舶推定領域を特定しても構わず(図3、S120)、上記のウエーキ方式以外の方式で航跡推定領域および船舶特定領域を特定しても構わない(図3、S121)。
【0118】
実施の形態2.
実施の形態1で探知した船舶について移動速度を推定する形態について説明する。
以下、実施の形態1で説明していない事項について主に説明する。説明を省略する事項は実施の形態1と同様である。
【0119】
図15は、実施の形態2における船舶探知装置100の機能構成図である。
実施の形態2における船舶探知装置100の機能構成について、図15に基づいて説明する。
【0120】
船舶探知装置100は、船舶探知処理部112を備える。
船舶探知処理部112は、実施の形態1(図2参照)で説明したCFAR方式演算部120、ウエーキ方式演算部121、SC比マップ生成部130、SC比合算マップ生成部140および船舶探知部150の機能を有する。
【0121】
船舶探知装置100は、さらに、ISAR方式演算部160、ドップラーシフト方式演算部161および船舶速度算出部170を備える。
【0122】
装置記憶部190(観測データ記憶部の一例)は、偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像191を生成するために使用されたレーダ200の観測データ189を記憶する。
【0123】
ISAR方式演算部160(船舶推定速度算出部の一例)は、偏波組み合わせ毎に、当該偏波組み合わせのレーダ画像191に対応する観測データ189に基づいて、船舶領域に表示される船舶の速度を船舶推定速度としてISAR方式(船舶速度推定アルゴリズムの一例)によって算出する。
【0124】
ドップラーシフト方式演算部161(船舶航跡推定速度算出部の一例)は、偏波組み合わせ毎に、当該偏波組み合わせの航跡推定領域に基づいて、船舶領域に表示される船舶の速度を船舶航跡推定速度としてドップラーシフト方式(船舶航跡速度推定アルゴリズムの一例)によって算出する。
【0125】
船舶速度算出部170(船舶強度比速度算出部の一例)は、偏波組み合わせ毎に、当該偏波組み合わせの船舶入射角に対応する当該レーダ画像191の画素領域に船舶領域が含まれる場合、船舶推定速度に船舶領域に対応する入射角のSC比を乗算した値を船舶SC比速度(船舶強度比速度の一例)として算出する。
船舶速度算出部170は、偏波組み合わせ毎に、当該偏波組み合わせの海面入射角に対応する当該レーダ画像の画素領域に船舶領域が含まれる場合、船舶航跡推定速度に船舶領域に対応する入射角のSC比を乗算した値を船舶SC比速度として算出する。
船舶速度算出部170は、複数の偏波組み合わせの複数の船舶SC比速度を合計した船舶SC比速度の合計値を算出し、複数の船舶SC比速度を算出するために使用した複数のSC比を合計したSC比の合計値を算出する。
船舶速度算出部170は、船舶SC比速度の合計値をSC比の合計値で除算した値を船舶領域に表示される船舶の速度として算出する。
【0126】
図16は、実施の形態2における船舶探知方法を示すフローチャートである。
実施の形態2における船舶探知方法の処理の流れについて、図16に基づいて説明する。
【0127】
実施の形態2における船舶探知方法では、実施の形態1で説明した処理(図3参照)に加えて、S160、S161およびS170を実行する。
以下、S160、S161およびS170について主に説明する。
【0128】
S160において、ISAR方式演算部160は、偏波組み合わせ毎に、当該偏波組み合わせの観測データ189を速度指定ISAR(Inverse Synthetic Aperture Radar)方式で処理し、船舶推定速度データ181を生成する。
【0129】
ISAR方式では、レーダ観測により得られた観測データ189をレンジマイグレーション処理し、高速フーリエ変換し、アジマス圧縮し、逆高速フーリエ変換してレーダ画像191を生成する。
速度指定ISAR方式とは、船舶の推定速度に基づいて参照関数を生成し、生成した参照関数をアジマス圧縮に使用するISAR方式である。
速度指定ISAR方式では、船舶の推定速度が正しいほど、船舶領域が鮮明に表示される。例えば、船舶領域には、周囲の画素領域よりも所定の割合以上または所定の画素値以上大きな画素値が設定される。
【0130】
ISAR方式演算部160は、船舶探知処理部112(実施の形態1における船舶探知部150)により特定された船舶領域を対象にして、船舶領域に存在する船舶の速度ベクトルの推定値を速度指定ISAR方式で算出する。
以下、速度指定ISAR方式で算出された船舶の速度ベクトルの推定値を「船舶推定速度」という。
船舶推定速度データ181は、船舶領域毎に船舶推定速度を示したデータである。
【0131】
速度指定ISAR方式の詳細については、特許文献2に開示されている。
【0132】
S160の後、S161に進む。
【0133】
S161において、ドップラーシフト方式演算部161は、偏波組み合わせ毎に、当該偏波組み合わせのウエーキ方式マップ196に基づいてドップラーシフト方式の速度推定処理を行い、船舶航跡推定速度データ182を生成する。
【0134】
ドップラーシフト方式とは、レーダ画像191に表示される航跡と船舶とのずれ量に基づいて、船舶の速度ベクトルの推定値を算出する方式である。
【0135】
以下、ドップラーシフト方式で算出された船舶の速度ベクトルの推定値を「船舶航跡推定速度」という。
船舶航跡推定速度データ182は、船舶領域毎に船舶航跡推定速度を示したデータである。
【0136】
図17は、ドップラーシフト方式による速度推定方法を示す概要図である。
ドップラーシフト方式による速度推定方法について、図17に基づいて説明する。
【0137】
レーダ画像191において、レンジ方向に移動している目標物(例えば、船舶240)は実際の位置からアジマス方向にずれた位置に表示される。目標物のレンジ方向の速度が大きいほどアジマス方向のずれ量は大きく、目標物のレンジ方向の速度が小さいほどアジマス方向のずれ量は小さい。これを「ドップラーシフト」という。
【0138】
ドップラーシフト方式演算部161は、船舶探知処理部112により特定された船舶領域を対象にして船舶領域に最も近い航跡推定領域をウエーキ方式マップ196から抽出する。
そして、ドップラーシフト方式演算部161は、船舶領域と航跡推定領域とのずれ量(画素数)に基づいて、船舶領域に存在する船舶の推定速度を算出する。
【0139】
ドップラーシフト方式の詳細については、特許文献1に開示されている。
【0140】
図16に戻り、S170から説明を続ける。
【0141】
S170において、船舶速度算出部170は、船舶領域毎に、船舶推定速度と船舶航跡推定速度とSC比とに基づいて船舶速度を算出する。
そして、船舶速度算出部170は、船舶領域毎に船舶領域に存在する船舶の速度を示した船舶速度データ183を生成する。
S170により、船舶探知方法の処理は終了する。
【0142】
図18は、実施の形態2における船舶速度算出処理(S170)を示すフローチャートである。
実施の形態2における船舶速度算出処理(S170)について、図18に基づいて説明する。
【0143】
S171において、船舶速度算出部170は、船舶探知データ199から未選択の船舶領域を選択する。
以下、S171で選択した船舶領域を「選択船舶領域」という。
S171の後、S172に進む。
【0144】
S172において、船舶速度算出部170は、選択船舶領域に対応するレーダ画像191の入射角を算出する。
以下、S172で算出した入射角を「対象入射角」という。
S172の後、S173に進む。
【0145】
S173において、船舶速度算出部170は、選択船舶領域に対して未選択の偏波組み合わせを選択する。
以下、S173で選択した偏波組み合わせを「選択組み合わせ」という。
S173の後、S174に進む。
【0146】
S174において、船舶速度算出部170は、選択組み合わせのSC比データ194から対象入射角のSC比を取得する。
以下、S174で取得したSC比を「対象SC比」という。
S174の後、S175に進む。
【0147】
S175において、船舶速度算出部170は、対象SC比の正負を判定する。
対象SC比が正の場合にはS175aに進み、対象SC比が負の場合にはS175bに進む。
また、対象SC比がゼロの場合にはS175aとS175bとのうち所定のいずれかに進む。
【0148】
S175aにおいて、船舶速度算出部170は、選択組み合わせの船舶推定速度データ181から選択船舶領域に対応する船舶推定速度を取得する。
以下、S175aで取得した船舶推定速度を「船舶候補速度」という。
S175aの後、S176に進む。
【0149】
S175bにおいて、船舶速度算出部170は、選択組み合わせの船舶航跡推定速度データ182から選択船舶領域に対応する船舶航跡推定速度を取得する。
以下、175bで取得した船舶航跡推定速度を「船舶候補速度」という。
S175bの後、S176に進む。
【0150】
S176において、船舶速度算出部170は、船舶候補速度に対象SC比の絶対値を乗算する。
以下、S176で算出した値を「船舶SC比速度」という。
S176の後、S177に進む。
【0151】
S177において、船舶速度算出部170は、選択船舶領域に対して未選択の偏波組み合わせが残っているか否かを判定する。
未選択の偏波組み合わせが残っている場合(YES)、S173に戻る。
全ての偏波組み合わせを選択済みの場合(NO)、S178に進む。
【0152】
S178において、船舶速度算出部170は、偏波組み合わせ毎に算出した船舶SC比速度を合計し、偏波組み合わせ毎に取得した対象SC比(の絶対値)を合計する。
そして、船舶速度算出部170は、船舶SC比速度の合計値を対象SC比の合計値で除算する。
船舶速度算出部170は、算出した値を選択船舶領域に対応する船舶速度として船舶速度データ183に設定する。
S178の後、S179に進む。
【0153】
S179において、船舶速度算出部170は、未選択の船舶領域が残っているか否かを判定する。
未選択の船舶領域が残っている場合(YES)、S171に戻る。
全ての船舶領域を選択済みの場合(NO)、船舶速度算出処理(S170)は終了する。
【0154】
図19、図20は、実施の形態2における船舶速度算出処理(S170)の概要図である。
実施の形態2における船舶速度算出処理(S170)の概要について、図19と図20とに基づいて説明する。
【0155】
図19において、船舶領域AはSC比が負の入射角(0度以上35度未満)に対応する領域に含まれるため、船舶領域Aの速度ベクトルとして船舶航跡推定速度データ182に示される速度ベクトルを選択する(S175、S175b)。
一方、船舶領域B・Cは正の入射角(35度以上90度未満)に対応する領域に含まれるため、船舶領域B・Cの速度ベクトルとして船舶推定速度データ181に示される速度ベクトルを選択する(S175、S175a)。
【0156】
図20において、偏波組み合わせ毎に、船舶領域Aの速度ベクトルに船舶領域Aの入射角に対応するSC比を乗じることにより、船舶領域Aの速度ベクトルをSC比で重み付けした船舶SC比速度を算出する(S176)。
そして、船舶領域Aの船舶SC比速度を合計し、船舶領域Aの速度ベクトルに乗じたSC比を合計し、船舶SC比速度の合計値をSC比の合計値で割った値を船舶領域Aの速度ベクトル(船舶速度)として算出する(S178)。
同様に、船舶領域Bと船舶領域Cとのそれぞれの速度ベクトル(船舶速度)を算出する。
【0157】
実施の形態2では、SC比の正負に基づいて船舶推定速度データ181と船舶航跡推定速度データ182とのいずれを選択するか判定した(図18、S175)。
但し、船舶散乱強度データ192と海面散乱強度データ193とを比較して判定しても構わない。この場合、船舶散乱強度が海面散乱強度より大きければ船舶推定速度データ181を選択し、海面散乱強度が船舶散乱強度より大きければ船舶航跡推定速度データ182を選択する。
【0158】
また、海面散乱強度(C)に対する船舶散乱強度(S)の対数値「10log10(S/C)」をSC比として船舶SC比速度を算出した(図18、S176)。
但し、対数値ではなく真値のSC比を用いて船舶SC比速度を算出しても構わない。この場合、船舶散乱強度が海面散乱強度より大きければ「S/C」をSC比として用い、海面散乱強度が船舶散乱強度より大きければ「C/S」をSC比として用いる。
【0159】
上記のISAR方式以外の方式で船舶推定速度を算出しても構わず(図16、S160)、上記のドップラーシフト方式以外の方式で船舶航跡推定速度を算出しても構わない(図16、S161)。
【0160】
実施の形態3.
一つの偏波組み合わせのレーダ画像191に基づいて船舶を探知する形態について説明する。
以下、実施の形態1と異なる事項について主に説明する。説明を省略する事項については実施の形態1と同様である。
【0161】
図21は、実施の形態3における船舶探知装置100の機能構成図である。
実施の形態3における船舶探知装置100の機能構成について、図21に基づいて説明する。
【0162】
船舶探知装置100は、実施の形態1で説明したSC比マップ生成部130とSC比合算マップ生成部140とを備えない。
【0163】
装置記憶部190(レーダ画像記憶部、散乱強度データ記憶部の一例)は、船舶と海面とのいずれかで散乱してレーダに入射した電磁波の強度を電磁波の入射角に対応する画素領域に設定した画像データをレーダ画像191として記憶する。
また、装置記憶部190は、船舶で散乱してレーダに入射する船舶散乱波の推定強度を入射角に対応付けて示す船舶散乱強度データ192と、海面で散乱してレーダに入射する海面散乱波の推定強度を入射角に対応付けて示す海面散乱強度データ193とを記憶する。
【0164】
CFAR方式演算部120(船舶推定領域算出部の一例)は、レーダ画像191に基づいて、複数の船舶を表示する複数の画素領域を複数の船舶推定領域としてCFAR方式(船舶領域推定アルゴリズムの一例)によって算出する。
【0165】
ウエーキ方式演算部121(航跡推定領域算出部、船舶特定領域算出部の一例)は、レーダ画像191に基づいて、複数の航跡を表示する複数の画素領域を複数の航跡推定領域としてウエーキ方式(航跡領域推定アルゴリズムの一例)によって算出する。
ウエーキ方式演算部121は、複数の航跡推定領域に基づいて複数の船舶を表示する複数の画素領域を複数の船舶特定領域として特定する。
【0166】
船舶探知部150(船舶入射角判定部、海面入射角判定部の一例)は、船舶散乱強度データ192に示される船舶散乱波の推定強度が海面散乱強度データ193に示される海面散乱波の推定強度より大きい入射角の範囲(SC比>0)を船舶入射角として判定する。
船舶探知部150は、海面散乱強度データ193に示される海面散乱波の推定強度が船舶散乱強度データ192に示される船舶散乱波の推定強度より大きい入射角の範囲(SC比<0)を海面入射角として判定する。
【0167】
船舶探知部150(船舶領域特定部の一例)は、複数の船舶推定領域のうち船舶入射角に対応するレーダ画像191の画素領域に含まれる船舶推定領域と、複数の船舶特定領域のうち海面入射角に対応するレーダ画像191の画素領域に含まれる船舶特定領域とを船舶を表示する船舶領域として特定する。
【0168】
図22は、実施の形態3における船舶探知方法を示すフローチャートである。
実施の形態3における船舶探知方法の処理について、図22に基づいて説明する。
【0169】
S110B〜S121Bは、実施の形態1(図3参照)で説明したS110〜S121に対応する処理である。
但し、S110B〜S121Bでは、偏波組み合わせ毎に処理を行わない。
【0170】
S210において、船舶探知部150は、船舶入射角領域内の船舶推定領域と海面入射角領域内の船舶特定領域とを船舶領域として特定する。
船舶入射角領域とは、SC比が正の値になる入射角(船舶入射角)に対応するレーダ画像191の画素領域のことである。
海面入射角領域とは、SC比が負の値になる入射角(海面入射角)に対応するレーダ画像191の画素領域のことである。
【0171】
図23は、実施の形態3における船舶領域特定処理(S210)を示すフローチャートである。
実施の形態3における船舶領域特定処理(S210)について、図23に基づいて説明する。
【0172】
S211において、船舶探知部150はレーダ画像191に対応する入射角の範囲から未選択の入射角を選択する。
例えば、レーダ画像191が20度から80度の入射角の範囲で観測地域を表示した画像であれば、船舶探知部150は20度から80度まで順に入射角を選択する。
以下、S211で選択した入射角を「選択角」という。
S211の後、S212に進む。
【0173】
S212において、船舶探知部150は、SC比データ194から選択角のSC比を取得する。以下、S212で取得したSC比を「対象SC比」という。
S212の後、S213に進む。
【0174】
S213において、船舶探知部150は対象SC比の正負を判定する。
対象SC比が正の場合にはS213aに進み、対象SC比が負の場合にはS213bに進む。
また、対象SC比がゼロの場合にはS213aとS213bとのうち所定のいずれかに進む。
【0175】
S213aにおいて、船舶探知部150は、CFAR方式マップ195から選択角に対応する画素行を抽出する。以下、S213aで抽出した画素行を「抽出行」という。
S213aの後、S214に進む。
【0176】
S213bにおいて、船舶探知部150は、ウエーキ方式マップ196から選択角に対応する画素行を抽出する。以下、S213bで抽出した画素行を「抽出行」という。
S213bの後、S214に進む。
【0177】
S214において、船舶探知部150は、船舶領域マップ184に抽出行を設定する。
船舶領域マップ184は、船舶領域に「1」を設定し、船舶領域以外の領域に「0」を設定した二次元のマップデータ(画像データ)である。
S214の後、S215に進む。
【0178】
S215において、船舶探知部150は、未選択の入射角が残っているか否かを判定する。
未選択の入射角が残っている場合(YES)、S211に戻る。
全ての入射角を選択済みの場合(NO)、S216に進む。
【0179】
S216において、船舶探知部150は、船舶領域マップ184から船舶領域を特定する。
S216の後、S217に進む。
【0180】
S217において、船舶探知部150は、実施の形態1(図3、S150)と同様に、船舶領域に対応する現実の座標値を算出し、船舶探知データ199を生成する。
S217により、船舶領域特定処理(S210)は終了する。
【0181】
実施の形態1と同様に、SC比の正負を判定せずに船舶散乱強度データ192と海面散乱強度データ193とを比較し、CFAR方式マップ195とウエーキ方式マップ196とのいずれかを選択しても構わない(図23、S213)。
【0182】
上記のCFAR方式以外の方式で船舶推定領域を特定しても構わず(図22、S120B)、上記のウエーキ方式以外の方式で航跡推定領域および船舶特定領域を特定しても構わない(図22、S121B)。
【0183】
実施の形態4.
実施の形態3で探知した船舶について移動速度を推定する形態について説明する。
以下、実施の形態2と異なる事項について主に説明する。説明を省略する事項は実施の形態2と同様である。
【0184】
図24は、実施の形態4における船舶探知装置100の機能構成図である。
実施の形態4における船舶探知装置100の機能構成について、図24に基づいて説明する。
【0185】
船舶探知装置100は、船舶速度算出部170の代わりに船舶速度選択部171を備える。
【0186】
装置記憶部190(観測データ記憶部の一例)は、レーダ画像191を生成するために使用されたレーダの観測データ189を記憶する。
【0187】
ISAR方式演算部160(船舶推定速度算出部の一例)は、レーダ画像191に対応する観測データ189に基づいて、船舶領域に表示される船舶の速度を船舶推定速度としてISAR方式(船舶速度推定アルゴリズムの一例)によって算出する。
【0188】
ドップラーシフト方式演算部161(船舶航跡推定速度算出部の一例)は、航跡推定領域に基づいて、船舶領域に表示される船舶の速度を船舶航跡推定速度としてドップラーシフト方式(船舶航跡速度推定アルゴリズムの一例)によって算出する。
【0189】
船舶速度選択部171は、船舶入射角に対応するレーダ画像191の画素領域に船舶領域が含まれる場合、船舶推定速度を船舶の速度として選択する。
船舶速度選択部171は、海面入射角に対応するレーダ画像191の画素領域に船舶領域が含まれる場合、船舶航跡推定速度を船舶の速度として選択する。
【0190】
図25は、実施の形態4における船舶探知方法を示すフローチャートである。
実施の形態4における船舶探知方法の処理の流れについて、図25に基づいて説明する。
【0191】
S110B〜S210は、実施の形態3(図22参照)と同じである。
【0192】
S160BおよびS161Bは、実施の形態2(図16参照)で説明したS160およびS161に対応する処理である。
但し、S160BおよびS161Bでは、偏波組み合わせ毎に処理を行わない。
【0193】
S220において、船舶速度選択部171は、船舶領域毎に、SC比に基づいて船舶推定速度と船舶航跡推定速度とのいずれかを船舶速度として選択する。
【0194】
図26は、実施の形態4における船舶速度選択処理(S220)を示すフローチャートである。
実施の形態4における船舶速度選択処理(S220)について、図26に基づいて説明する。
【0195】
S221において、船舶速度選択部171は、船舶探知データ199から未選択の船舶領域を選択する。
以下、S221で選択した船舶領域を「選択船舶領域」という。
S221の後、S222に進む。
【0196】
S222において、船舶速度選択部171は、選択船舶領域に対応するレーダ画像191の入射角を算出する。
以下、S222で算出した入射角を「対象入射角」という。
S222の後、S223に進む。
【0197】
S223において、船舶速度選択部171は、SC比データ194から対象入射角のSC比を取得する。
以下、S223で取得したSC比を「対象SC比」という。
S223の後、S224に進む。
【0198】
S224において、船舶速度選択部171は、対象SC比の正負を判定する。
対象SC比が正の場合にはS224aに進み、対象SC比が負の場合にはS224bに進む。
また、対象SC比がゼロの場合にはS224aとS224bとのうち所定のいずれかに進む。
【0199】
S224aにおいて、船舶速度選択部171は、船舶推定速度データ181から選択船舶領域に対応する船舶推定速度を船舶速度として取得する。
S224aの後、S225に進む。
【0200】
S224bにおいて、船舶速度選択部171は、船舶航跡推定速度データ182から選択船舶領域に対応する船舶航跡推定速度を船舶速度として取得する。
S224bの後、S225に進む。
【0201】
S225において、船舶速度選択部171は、未選択の船舶領域が残っているか否かを判定する。
未選択の船舶領域が残っている場合(YES)、S221に戻る。
全ての選択領域を選択済みの場合(NO)、船舶速度選択処理(S220)は終了する。
【0202】
実施の形態2と同様に、SC比の正負を判断せずに船舶散乱強度データ192と海面散乱強度データ193とを比較し、船舶推定速度データ181と船舶航跡推定速度データ182とのいずれかを選択しても構わない(図26、S224)。
【0203】
上記のISAR方式以外の方式で船舶推定速度を算出しても構わず(図25、S160B)、上記のドップラーシフト方式以外の方式で船舶航跡推定速度を算出しても構わない(図25、S161B)。
【符号の説明】
【0204】
100 船舶探知装置、110 シミュレーション部、111 SC比算出部、112 船舶探知処理部、120 CFAR方式演算部、121 ウエーキ方式演算部、130 SC比マップ生成部、140 SC比合算マップ生成部、150 船舶探知部、160 ISAR方式演算部、161 ドップラーシフト方式演算部、170 船舶速度算出部、171 船舶速度選択部、181 船舶推定速度データ、182 船舶航跡推定速度データ、183 船舶速度データ、184 船舶領域マップ、189 観測データ、190 装置記憶部、191 レーダ画像、192 船舶散乱強度データ、193 海面散乱強度データ、194 SC比データ、195 CFAR方式マップ、196 ウエーキ方式マップ、197 SC比マップ、198 SC比合算マップ、199 船舶探知データ、200 レーダ、201 海面、202 船舶、203 海面散乱波、204 船舶散乱波、210 ターゲットセル、211 ガードセル、212 レファレンスセル、213 ヒストグラム、220 レファレンスセル、221 航跡候補、222 船舶特定領域、230 船舶推定領域、231 船舶特定領域、232 船舶候補領域、233 船舶領域、240 船舶、241 航跡、901 表示装置、902 キーボード、903 マウス、904 ドライブ装置、905 プリンタ装置、911 CPU、912 バス、913 ROM、914 RAM、915 通信装置、920 磁気ディスク装置、921 OS、922 ウィンドウシステム、923 プログラム群、924 ファイル群。
【特許請求の範囲】
【請求項1】
船舶が航行する海面に向けてレーダから出射された出射偏波の振動方向と、船舶と海面とのいずれかで散乱してレーダに入射した入射偏波の振動方向とを組み合わせた偏波組み合わせ毎に、入射偏波の強度を入射偏波の入射角に対応する画素領域に設定した画像データをレーダ画像として記憶するレーダ画像記憶部と、
偏波組み合わせ毎に、船舶で散乱してレーダに入射する船舶散乱波の推定強度を入射角に対応付けて示す船舶散乱強度データと、海面で散乱してレーダに入射する海面散乱波の推定強度を入射角に対応付けて示す海面散乱強度データとを記憶する散乱強度データ記憶部と、
偏波組み合わせ毎に、当該偏波組み合わせの船舶散乱強度データと当該偏波組み合わせの海面散乱強度データとに基づいて船舶散乱波の推定強度と海面散乱波の推定強度との比率を推定強度比として入射角に対応付けて算出し、算出した推定強度比を入射角に対応付けて示す推定強度比データを生成する推定強度比算出部と、
偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像に基づいて、複数の船舶を表示する複数の画素領域を複数の船舶推定領域として所定の船舶領域推定アルゴリズムによって算出する船舶推定領域算出部と、
偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像に基づいて、複数の航跡を表示する複数の画素領域を複数の航跡推定領域として所定の航跡領域推定アルゴリズムによって算出する航跡推定領域算出部と、
偏波組み合わせ毎に、複数の航跡推定領域に基づいて複数の船舶を表示する複数の画素領域を複数の船舶特定領域として特定する船舶特定領域算出部と、
偏波組み合わせ毎に、当該偏波組み合わせの船舶散乱強度データに示される船舶散乱波の推定強度が当該偏波組み合わせの海面散乱強度データに示される海面散乱波の推定強度より大きい入射角の範囲を船舶入射角として判定する船舶入射角判定部と、
偏波組み合わせ毎に、当該偏波組み合わせの海面散乱強度データに示される海面散乱波の推定強度が当該偏波組み合わせの船舶散乱強度データに示される船舶散乱波の推定強度より大きい入射角の範囲を海面入射角として判定する海面入射角判定部と、
偏波組み合わせ毎に、当該偏波組み合わせの複数の船舶推定領域のうち当該偏波組み合わせの船舶入射角に対応する当該レーダ画像の画素領域に含まれる船舶推定領域を船舶候補領域として抽出し、当該偏波組み合わせの複数の船舶特定領域のうち当該偏波組み合わせの海面入射角に対応する当該レーダ画像の画素領域に含まれる船舶特定領域を船舶候補領域として抽出する船舶候補領域抽出部と、
偏波組み合わせ毎に、当該偏波組み合わせの複数の船舶候補領域それぞれの領域値として当該船舶候補領域に対応する入射角の推定強度比を当該偏波組み合わせの推定強度比データから取得する船舶候補領域値取得部と、
複数の偏波組み合わせの複数の船舶候補領域のうち2つ以上の船舶候補領域が重複する重複領域に対応する二次元領域に当該2つ以上の船舶候補領域の領域値を合計した合計値を設定し、他の船舶候補領域と重複しない船舶候補領域に対応する二次元領域に当該船舶候補領域の領域値を設定した二次元のマップデータを合算マップとして生成する合算マップ生成部と、
前記合算マップ内の二次元領域のうち所定の探知閾値より大きい領域値が設定された二次元領域を船舶を表示する船舶領域として特定する船舶領域特定部と
を備えたことを特徴とする船舶探知装置。
【請求項2】
前記船舶探知装置は、さらに、
偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像を生成するために使用されたレーダの観測データを記憶する観測データ記憶部と、
偏波組み合わせ毎に、当該偏波組み合わせのレーダ画像に対応する観測データに基づいて、前記船舶領域に表示される船舶の速度を船舶推定速度として所定の船舶速度推定アルゴリズムによって算出する船舶推定速度算出部と、
偏波組み合わせ毎に、当該偏波組み合わせの航跡推定領域に基づいて、前記船舶領域に表示される船舶の速度を船舶航跡推定速度として所定の船舶航跡速度推定アルゴリズムによって算出する船舶航跡推定速度算出部と、
偏波組み合わせ毎に、当該偏波組み合わせの船舶入射角に対応する当該レーダ画像の画素領域に前記船舶領域が含まれる場合、前記船舶推定速度に前記船舶領域に対応する入射角の推定強度比を乗算した値を船舶強度比速度として算出し、当該偏波組み合わせの海面入射角に対応する当該レーダ画像の画素領域に前記船舶領域が含まれる場合、前記船舶航跡推定速度に前記船舶領域に対応する入射角の推定強度比を乗算した値を船舶強度比速度として算出する船舶強度比速度算出部と、
複数の偏波組み合わせの複数の船舶強度比速度を合計した船舶強度比速度の合計値を算出し、複数の船舶強度比速度を算出するために使用した複数の推定強度比を合計した推定強度比の合計値を算出し、船舶強度比速度の合計値を推定強度比の合計値で除算した値を前記船舶領域に表示される船舶の速度として算出する船舶速度算出部とを備えた
ことを特徴とする請求項1記載の船舶探知装置。
【請求項3】
船舶と海面とのいずれかで散乱してレーダに入射した電磁波の強度を電磁波の入射角に対応する画素領域に設定した画像データをレーダ画像として記憶するレーダ画像記憶部と、
船舶で散乱してレーダに入射する船舶散乱波の推定強度を入射角に対応付けて示す船舶散乱強度データと、海面で散乱してレーダに入射する海面散乱波の推定強度を入射角に対応付けて示す海面散乱強度データとを記憶する散乱強度データ記憶部と、
前記レーダ画像に基づいて、複数の船舶を表示する複数の画素領域を複数の船舶推定領域として所定の船舶領域推定アルゴリズムによって算出する船舶推定領域算出部と、
前記レーダ画像に基づいて、複数の航跡を表示する複数の画素領域を複数の航跡推定領域として所定の航跡領域推定アルゴリズムによって算出する航跡推定領域算出部と、
複数の航跡推定領域に基づいて複数の船舶を表示する複数の画素領域を複数の船舶特定領域として特定する船舶特定領域算出部と、
前記船舶散乱強度データに示される船舶散乱波の推定強度が前記海面散乱強度データに示される海面散乱波の推定強度より大きい入射角の範囲を船舶入射角として判定する船舶入射角判定部と、
前記海面散乱強度データに示される海面散乱波の推定強度が前記船舶散乱強度データに示される船舶散乱波の推定強度より大きい入射角の範囲を海面入射角として判定する海面入射角判定部と、
複数の船舶推定領域のうち前記船舶入射角に対応する前記レーダ画像の画素領域に含まれる船舶推定領域と、複数の船舶特定領域のうち前記海面入射角に対応する前記レーダ画像の画素領域に含まれる船舶特定領域とを船舶を表示する船舶領域として特定する船舶領域特定部と
を備えたことを特徴とする船舶探知装置。
【請求項4】
前記船舶探知装置は、さらに、
前記レーダ画像を生成するために使用されたレーダの観測データを記憶する観測データ記憶部と、
前記レーダ画像に対応する観測データに基づいて、前記船舶領域に表示される船舶の速度を船舶推定速度として所定の船舶速度推定アルゴリズムによって算出する船舶推定速度算出部と、
前記航跡推定領域に基づいて、前記船舶領域に表示される船舶の速度を船舶航跡推定速度として所定の船舶航跡速度推定アルゴリズムによって算出する船舶航跡推定速度算出部と、
前記船舶入射角に対応する前記レーダ画像の画素領域に前記船舶領域が含まれる場合、前記船舶推定速度を船舶の速度として選択し、前記海面入射角に対応する前記レーダ画像の画素領域に前記船舶領域が含まれる場合、前記船舶航跡推定速度を船舶の速度として選択する船舶速度選択部とを備えた
ことを特徴とする請求項3記載の船舶探知装置。
【請求項5】
船舶が航行する海面に向けてレーダから出射された出射偏波の振動方向と、船舶と海面とのいずれかで散乱してレーダに入射した入射偏波の振動方向とを組み合わせた偏波組み合わせ毎に、入射偏波の強度を入射偏波の入射角に対応する画素領域に設定した画像データをレーダ画像として記憶するレーダ画像記憶部と、
偏波組み合わせ毎に、船舶で散乱してレーダに入射する船舶散乱波の推定強度を入射角に対応付けて示す船舶散乱強度データと、海面で散乱してレーダに入射する海面散乱波の推定強度を入射角に対応付けて示す海面散乱強度データとを記憶する散乱強度データ記憶部とを用いる船舶探知プログラムにおいて、
偏波組み合わせ毎に、当該偏波組み合わせの船舶散乱強度データと当該偏波組み合わせの海面散乱強度データとに基づいて船舶散乱波の推定強度と海面散乱波の推定強度との比率を推定強度比として入射角に対応付けて算出し、算出した推定強度比を入射角に対応付けて示す推定強度比データを生成する推定強度比算出処理と、
偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像に基づいて、複数の船舶を表示する複数の画素領域を複数の船舶推定領域として所定の船舶領域推定アルゴリズムによって算出する船舶推定領域算出処理と、
偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像に基づいて、複数の航跡を表示する複数の画素領域を複数の航跡推定領域として所定の航跡領域推定アルゴリズムによって算出する航跡推定領域算出処理と、
偏波組み合わせ毎に、複数の航跡推定領域に基づいて複数の船舶を表示する複数の画素領域を複数の船舶特定領域として特定する船舶特定領域算出処理と、
偏波組み合わせ毎に、当該偏波組み合わせの船舶散乱強度データに示される船舶散乱波の推定強度が当該偏波組み合わせの海面散乱強度データに示される海面散乱波の推定強度より大きい入射角の範囲を船舶入射角として判定する船舶入射角判定処理と、
偏波組み合わせ毎に、当該偏波組み合わせの海面散乱強度データに示される海面散乱波の推定強度が当該偏波組み合わせの船舶散乱強度データに示される船舶散乱波の推定強度より大きい入射角の範囲を海面入射角として判定する海面入射角判定処理と、
偏波組み合わせ毎に、当該偏波組み合わせの複数の船舶推定領域のうち当該偏波組み合わせの船舶入射角に対応する当該レーダ画像の画素領域に含まれる船舶推定領域を船舶候補領域として抽出し、当該偏波組み合わせの複数の船舶特定領域のうち当該偏波組み合わせの海面入射角に対応する当該レーダ画像の画素領域に含まれる船舶特定領域を船舶候補領域として抽出する船舶候補領域抽出処理と、
偏波組み合わせ毎に、当該偏波組み合わせの複数の船舶候補領域それぞれの領域値として当該船舶候補領域に対応する入射角の推定強度比を当該偏波組み合わせの推定強度比データから取得する船舶候補領域値取得処理と、
複数の偏波組み合わせの複数の船舶候補領域のうち2つ以上の船舶候補領域が重複する重複領域に対応する二次元領域に当該2つ以上の船舶候補領域の領域値を合計した合計値を設定し、他の船舶候補領域と重複しない船舶候補領域に対応する二次元領域に当該船舶候補領域の領域値を設定した二次元のマップデータを合算マップとして生成する合算マップ生成処理と、
前記合算マップ内の二次元領域のうち所定の探知閾値より大きい領域値が設定された二次元領域を船舶を表示する船舶領域として特定する船舶領域特定処理と
をコンピュータに実行させる船舶探知プログラム。
【請求項6】
前記船舶探知プログラムは、さらに、
偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像を生成するために使用されたレーダの観測データを記憶する観測データ記憶部を用い、
前記船舶探知プログラムは、さらに、
偏波組み合わせ毎に、当該偏波組み合わせのレーダ画像に対応する観測データに基づいて、前記船舶領域に表示される船舶の速度を船舶推定速度として所定の船舶速度推定アルゴリズムによって算出する船舶推定速度算出処理と、
偏波組み合わせ毎に、当該偏波組み合わせの航跡推定領域に基づいて、前記船舶領域に表示される船舶の速度を船舶航跡推定速度として所定の船舶航跡速度推定アルゴリズムによって算出する船舶航跡推定速度算出処理と、
偏波組み合わせ毎に、当該偏波組み合わせの船舶入射角に対応する当該レーダ画像の画素領域に前記船舶領域が含まれる場合、前記船舶推定速度に前記船舶領域に対応する入射角の推定強度比を乗算した値を船舶強度比速度として算出し、当該偏波組み合わせの海面入射角に対応する当該レーダ画像の画素領域に前記船舶領域が含まれる場合、前記船舶航跡推定速度に前記船舶領域に対応する入射角の推定強度比を乗算した値を船舶強度比速度として算出する船舶強度比速度算出処理と、
複数の偏波組み合わせの複数の船舶強度比速度を合計した船舶強度比速度の合計値を算出し、複数の船舶強度比速度を算出するために使用した複数の推定強度比を合計した推定強度比の合計値を算出し、船舶強度比速度の合計値を推定強度比の合計値で除算した値を前記船舶領域に表示される船舶の速度として算出する船舶速度算出処理とをコンピュータに実行させる
ことを特徴とする請求項5記載の船舶探知プログラム。
【請求項7】
船舶と海面とのいずれかで散乱してレーダに入射した電磁波の強度を電磁波の入射角に対応する画素領域に設定した画像データをレーダ画像として記憶するレーダ画像記憶部と、
船舶で散乱してレーダに入射する船舶散乱波の推定強度を入射角に対応付けて示す船舶散乱強度データと、海面で散乱してレーダに入射する海面散乱波の推定強度を入射角に対応付けて示す海面散乱強度データとを記憶する散乱強度データ記憶部を用いる船舶探知プログラムにおいて、
前記レーダ画像に基づいて、複数の船舶を表示する複数の画素領域を複数の船舶推定領域として所定の船舶領域推定アルゴリズムによって算出する船舶推定領域算出処理と、
前記レーダ画像に基づいて、複数の航跡を表示する複数の画素領域を複数の航跡推定領域として所定の航跡領域推定アルゴリズムによって算出する航跡推定領域算出処理と、
複数の航跡推定領域に基づいて複数の船舶を表示する複数の画素領域を複数の船舶特定領域として特定する船舶特定領域算出処理と、
前記船舶散乱強度データに示される船舶散乱波の推定強度が前記海面散乱強度データに示される海面散乱波の推定強度より大きい入射角の範囲を船舶入射角として判定する船舶入射角判定処理と、
前記海面散乱強度データに示される海面散乱波の推定強度が前記船舶散乱強度データに示される船舶散乱波の推定強度より大きい入射角の範囲を海面入射角として判定する海面入射角判定処理と、
複数の船舶推定領域のうち前記船舶入射角に対応する前記レーダ画像の画素領域に含まれる船舶推定領域と、複数の船舶特定領域のうち前記海面入射角に対応する前記レーダ画像の画素領域に含まれる船舶特定領域とを船舶を表示する船舶領域として特定する船舶領域特定処理と
をコンピュータに実行させる船舶探知プログラム。
【請求項8】
前記船舶探知プログラムは、さらに、
前記レーダ画像を生成するために使用されたレーダの観測データを記憶する観測データ記憶部を用い、
前記船舶探知プログラムは、さらに、
前記レーダ画像に対応する観測データに基づいて、前記船舶領域に表示される船舶の速度を船舶推定速度として所定の船舶速度推定アルゴリズムによって算出する船舶推定速度算出処理と、
前記航跡推定領域に基づいて、前記船舶領域に表示される船舶の速度を船舶航跡推定速度として所定の船舶航跡速度推定アルゴリズムによって算出する船舶航跡推定速度算出処理と、
前記船舶入射角に対応する前記レーダ画像の画素領域に前記船舶領域が含まれる場合、前記船舶推定速度を船舶の速度として選択し、前記海面入射角に対応する前記レーダ画像の画素領域に前記船舶領域が含まれる場合、前記船舶航跡推定速度を船舶の速度として選択する船舶速度選択処理とをコンピュータに実行させる
ことを特徴とする請求項7記載の船舶探知プログラム。
【請求項9】
船舶が航行する海面に向けてレーダから出射された出射偏波の振動方向と、船舶と海面とのいずれかで散乱してレーダに入射した入射偏波の振動方向とを組み合わせた偏波組み合わせ毎に、入射偏波の強度を入射偏波の入射角に対応する画素領域に設定した画像データをレーダ画像として記憶するレーダ画像記憶部と、
偏波組み合わせ毎に、船舶で散乱してレーダに入射する船舶散乱波の推定強度を入射角に対応付けて示す船舶散乱強度データと、海面で散乱してレーダに入射する海面散乱波の推定強度を入射角に対応付けて示す海面散乱強度データとを記憶する散乱強度データ記憶部とを備える船舶探知装置の船舶探知方法において、
推定強度比算出部が、偏波組み合わせ毎に、当該偏波組み合わせの船舶散乱強度データと当該偏波組み合わせの海面散乱強度データとに基づいて船舶散乱波の推定強度と海面散乱波の推定強度との比率を推定強度比として入射角に対応付けて算出し、算出した推定強度比を入射角に対応付けて示す推定強度比データを生成し、
船舶推定領域算出部が、偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像に基づいて、複数の船舶を表示する複数の画素領域を複数の船舶推定領域として所定の船舶領域推定アルゴリズムによって算出し、
航跡推定領域算出部が、偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像に基づいて、複数の航跡を表示する複数の画素領域を複数の航跡推定領域として所定の航跡領域推定アルゴリズムによって算出し、
船舶特定領域算出部が、偏波組み合わせ毎に、複数の航跡推定領域に基づいて複数の船舶を表示する複数の画素領域を複数の船舶特定領域として特定し、
船舶入射角判定部が、偏波組み合わせ毎に、当該偏波組み合わせの船舶散乱強度データに示される船舶散乱波の推定強度が当該偏波組み合わせの海面散乱強度データに示される海面散乱波の推定強度より大きい入射角の範囲を船舶入射角として判定し、
海面入射角判定部が、偏波組み合わせ毎に、当該偏波組み合わせの海面散乱強度データに示される海面散乱波の推定強度が当該偏波組み合わせの船舶散乱強度データに示される船舶散乱波の推定強度より大きい入射角の範囲を海面入射角として判定し、
船舶候補領域抽出部が、偏波組み合わせ毎に、当該偏波組み合わせの複数の船舶推定領域のうち当該偏波組み合わせの船舶入射角に対応する当該レーダ画像の画素領域に含まれる船舶推定領域を船舶候補領域として抽出し、当該偏波組み合わせの複数の船舶特定領域のうち当該偏波組み合わせの海面入射角に対応する当該レーダ画像の画素領域に含まれる船舶特定領域を船舶候補領域として抽出し、
船舶候補領域値取得部が、偏波組み合わせ毎に、当該偏波組み合わせの複数の船舶候補領域それぞれの領域値として当該船舶候補領域に対応する入射角の推定強度比を当該偏波組み合わせの推定強度比データから取得し、
合算マップ生成部が、複数の偏波組み合わせの複数の船舶候補領域のうち2つ以上の船舶候補領域が重複する重複領域に対応する二次元領域に当該2つ以上の船舶候補領域の領域値を合計した合計値を設定し、他の船舶候補領域と重複しない船舶候補領域に対応する二次元領域に当該船舶候補領域の領域値を設定した二次元のマップデータを合算マップとして生成し、
船舶領域特定部が、前記合算マップ内の二次元領域のうち所定の探知閾値より大きい領域値が設定された二次元領域を船舶を表示する船舶領域として特定する
ことを特徴とする船舶探知装置の船舶探知方法。
【請求項10】
船舶と海面とのいずれかで散乱してレーダに入射した電磁波の強度を電磁波の入射角に対応する画素領域に設定した画像データをレーダ画像として記憶するレーダ画像記憶部と、
船舶で散乱してレーダに入射する船舶散乱波の推定強度を入射角に対応付けて示す船舶散乱強度データと、海面で散乱してレーダに入射する海面散乱波の推定強度を入射角に対応付けて示す海面散乱強度データとを記憶する散乱強度データ記憶部とを備える船舶探知装置の船舶探知方法において、
船舶推定領域算出部が、前記レーダ画像に基づいて、複数の船舶を表示する複数の画素領域を複数の船舶推定領域として所定の船舶領域推定アルゴリズムによって算出し、
航跡推定領域算出部が、前記レーダ画像に基づいて、複数の航跡を表示する複数の画素領域を複数の航跡推定領域として所定の航跡領域推定アルゴリズムによって算出し、
船舶特定領域算出部が、複数の航跡推定領域に基づいて複数の船舶を表示する複数の画素領域を複数の船舶特定領域として特定し、
船舶入射角判定部が、前記船舶散乱強度データに示される船舶散乱波の推定強度が前記海面散乱強度データに示される海面散乱波の推定強度より大きい入射角の範囲を船舶入射角として判定し、
海面入射角判定部が、前記海面散乱強度データに示される海面散乱波の推定強度が前記船舶散乱強度データに示される船舶散乱波の推定強度より大きい入射角の範囲を海面入射角として判定し、
船舶領域特定部が、複数の船舶推定領域のうち前記船舶入射角に対応する前記レーダ画像の画素領域に含まれる船舶推定領域と、複数の船舶特定領域のうち前記海面入射角に対応する前記レーダ画像の画素領域に含まれる船舶特定領域とを船舶を表示する船舶領域として特定する
ことを特徴とする船舶探知装置の船舶探知方法。
【請求項1】
船舶が航行する海面に向けてレーダから出射された出射偏波の振動方向と、船舶と海面とのいずれかで散乱してレーダに入射した入射偏波の振動方向とを組み合わせた偏波組み合わせ毎に、入射偏波の強度を入射偏波の入射角に対応する画素領域に設定した画像データをレーダ画像として記憶するレーダ画像記憶部と、
偏波組み合わせ毎に、船舶で散乱してレーダに入射する船舶散乱波の推定強度を入射角に対応付けて示す船舶散乱強度データと、海面で散乱してレーダに入射する海面散乱波の推定強度を入射角に対応付けて示す海面散乱強度データとを記憶する散乱強度データ記憶部と、
偏波組み合わせ毎に、当該偏波組み合わせの船舶散乱強度データと当該偏波組み合わせの海面散乱強度データとに基づいて船舶散乱波の推定強度と海面散乱波の推定強度との比率を推定強度比として入射角に対応付けて算出し、算出した推定強度比を入射角に対応付けて示す推定強度比データを生成する推定強度比算出部と、
偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像に基づいて、複数の船舶を表示する複数の画素領域を複数の船舶推定領域として所定の船舶領域推定アルゴリズムによって算出する船舶推定領域算出部と、
偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像に基づいて、複数の航跡を表示する複数の画素領域を複数の航跡推定領域として所定の航跡領域推定アルゴリズムによって算出する航跡推定領域算出部と、
偏波組み合わせ毎に、複数の航跡推定領域に基づいて複数の船舶を表示する複数の画素領域を複数の船舶特定領域として特定する船舶特定領域算出部と、
偏波組み合わせ毎に、当該偏波組み合わせの船舶散乱強度データに示される船舶散乱波の推定強度が当該偏波組み合わせの海面散乱強度データに示される海面散乱波の推定強度より大きい入射角の範囲を船舶入射角として判定する船舶入射角判定部と、
偏波組み合わせ毎に、当該偏波組み合わせの海面散乱強度データに示される海面散乱波の推定強度が当該偏波組み合わせの船舶散乱強度データに示される船舶散乱波の推定強度より大きい入射角の範囲を海面入射角として判定する海面入射角判定部と、
偏波組み合わせ毎に、当該偏波組み合わせの複数の船舶推定領域のうち当該偏波組み合わせの船舶入射角に対応する当該レーダ画像の画素領域に含まれる船舶推定領域を船舶候補領域として抽出し、当該偏波組み合わせの複数の船舶特定領域のうち当該偏波組み合わせの海面入射角に対応する当該レーダ画像の画素領域に含まれる船舶特定領域を船舶候補領域として抽出する船舶候補領域抽出部と、
偏波組み合わせ毎に、当該偏波組み合わせの複数の船舶候補領域それぞれの領域値として当該船舶候補領域に対応する入射角の推定強度比を当該偏波組み合わせの推定強度比データから取得する船舶候補領域値取得部と、
複数の偏波組み合わせの複数の船舶候補領域のうち2つ以上の船舶候補領域が重複する重複領域に対応する二次元領域に当該2つ以上の船舶候補領域の領域値を合計した合計値を設定し、他の船舶候補領域と重複しない船舶候補領域に対応する二次元領域に当該船舶候補領域の領域値を設定した二次元のマップデータを合算マップとして生成する合算マップ生成部と、
前記合算マップ内の二次元領域のうち所定の探知閾値より大きい領域値が設定された二次元領域を船舶を表示する船舶領域として特定する船舶領域特定部と
を備えたことを特徴とする船舶探知装置。
【請求項2】
前記船舶探知装置は、さらに、
偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像を生成するために使用されたレーダの観測データを記憶する観測データ記憶部と、
偏波組み合わせ毎に、当該偏波組み合わせのレーダ画像に対応する観測データに基づいて、前記船舶領域に表示される船舶の速度を船舶推定速度として所定の船舶速度推定アルゴリズムによって算出する船舶推定速度算出部と、
偏波組み合わせ毎に、当該偏波組み合わせの航跡推定領域に基づいて、前記船舶領域に表示される船舶の速度を船舶航跡推定速度として所定の船舶航跡速度推定アルゴリズムによって算出する船舶航跡推定速度算出部と、
偏波組み合わせ毎に、当該偏波組み合わせの船舶入射角に対応する当該レーダ画像の画素領域に前記船舶領域が含まれる場合、前記船舶推定速度に前記船舶領域に対応する入射角の推定強度比を乗算した値を船舶強度比速度として算出し、当該偏波組み合わせの海面入射角に対応する当該レーダ画像の画素領域に前記船舶領域が含まれる場合、前記船舶航跡推定速度に前記船舶領域に対応する入射角の推定強度比を乗算した値を船舶強度比速度として算出する船舶強度比速度算出部と、
複数の偏波組み合わせの複数の船舶強度比速度を合計した船舶強度比速度の合計値を算出し、複数の船舶強度比速度を算出するために使用した複数の推定強度比を合計した推定強度比の合計値を算出し、船舶強度比速度の合計値を推定強度比の合計値で除算した値を前記船舶領域に表示される船舶の速度として算出する船舶速度算出部とを備えた
ことを特徴とする請求項1記載の船舶探知装置。
【請求項3】
船舶と海面とのいずれかで散乱してレーダに入射した電磁波の強度を電磁波の入射角に対応する画素領域に設定した画像データをレーダ画像として記憶するレーダ画像記憶部と、
船舶で散乱してレーダに入射する船舶散乱波の推定強度を入射角に対応付けて示す船舶散乱強度データと、海面で散乱してレーダに入射する海面散乱波の推定強度を入射角に対応付けて示す海面散乱強度データとを記憶する散乱強度データ記憶部と、
前記レーダ画像に基づいて、複数の船舶を表示する複数の画素領域を複数の船舶推定領域として所定の船舶領域推定アルゴリズムによって算出する船舶推定領域算出部と、
前記レーダ画像に基づいて、複数の航跡を表示する複数の画素領域を複数の航跡推定領域として所定の航跡領域推定アルゴリズムによって算出する航跡推定領域算出部と、
複数の航跡推定領域に基づいて複数の船舶を表示する複数の画素領域を複数の船舶特定領域として特定する船舶特定領域算出部と、
前記船舶散乱強度データに示される船舶散乱波の推定強度が前記海面散乱強度データに示される海面散乱波の推定強度より大きい入射角の範囲を船舶入射角として判定する船舶入射角判定部と、
前記海面散乱強度データに示される海面散乱波の推定強度が前記船舶散乱強度データに示される船舶散乱波の推定強度より大きい入射角の範囲を海面入射角として判定する海面入射角判定部と、
複数の船舶推定領域のうち前記船舶入射角に対応する前記レーダ画像の画素領域に含まれる船舶推定領域と、複数の船舶特定領域のうち前記海面入射角に対応する前記レーダ画像の画素領域に含まれる船舶特定領域とを船舶を表示する船舶領域として特定する船舶領域特定部と
を備えたことを特徴とする船舶探知装置。
【請求項4】
前記船舶探知装置は、さらに、
前記レーダ画像を生成するために使用されたレーダの観測データを記憶する観測データ記憶部と、
前記レーダ画像に対応する観測データに基づいて、前記船舶領域に表示される船舶の速度を船舶推定速度として所定の船舶速度推定アルゴリズムによって算出する船舶推定速度算出部と、
前記航跡推定領域に基づいて、前記船舶領域に表示される船舶の速度を船舶航跡推定速度として所定の船舶航跡速度推定アルゴリズムによって算出する船舶航跡推定速度算出部と、
前記船舶入射角に対応する前記レーダ画像の画素領域に前記船舶領域が含まれる場合、前記船舶推定速度を船舶の速度として選択し、前記海面入射角に対応する前記レーダ画像の画素領域に前記船舶領域が含まれる場合、前記船舶航跡推定速度を船舶の速度として選択する船舶速度選択部とを備えた
ことを特徴とする請求項3記載の船舶探知装置。
【請求項5】
船舶が航行する海面に向けてレーダから出射された出射偏波の振動方向と、船舶と海面とのいずれかで散乱してレーダに入射した入射偏波の振動方向とを組み合わせた偏波組み合わせ毎に、入射偏波の強度を入射偏波の入射角に対応する画素領域に設定した画像データをレーダ画像として記憶するレーダ画像記憶部と、
偏波組み合わせ毎に、船舶で散乱してレーダに入射する船舶散乱波の推定強度を入射角に対応付けて示す船舶散乱強度データと、海面で散乱してレーダに入射する海面散乱波の推定強度を入射角に対応付けて示す海面散乱強度データとを記憶する散乱強度データ記憶部とを用いる船舶探知プログラムにおいて、
偏波組み合わせ毎に、当該偏波組み合わせの船舶散乱強度データと当該偏波組み合わせの海面散乱強度データとに基づいて船舶散乱波の推定強度と海面散乱波の推定強度との比率を推定強度比として入射角に対応付けて算出し、算出した推定強度比を入射角に対応付けて示す推定強度比データを生成する推定強度比算出処理と、
偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像に基づいて、複数の船舶を表示する複数の画素領域を複数の船舶推定領域として所定の船舶領域推定アルゴリズムによって算出する船舶推定領域算出処理と、
偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像に基づいて、複数の航跡を表示する複数の画素領域を複数の航跡推定領域として所定の航跡領域推定アルゴリズムによって算出する航跡推定領域算出処理と、
偏波組み合わせ毎に、複数の航跡推定領域に基づいて複数の船舶を表示する複数の画素領域を複数の船舶特定領域として特定する船舶特定領域算出処理と、
偏波組み合わせ毎に、当該偏波組み合わせの船舶散乱強度データに示される船舶散乱波の推定強度が当該偏波組み合わせの海面散乱強度データに示される海面散乱波の推定強度より大きい入射角の範囲を船舶入射角として判定する船舶入射角判定処理と、
偏波組み合わせ毎に、当該偏波組み合わせの海面散乱強度データに示される海面散乱波の推定強度が当該偏波組み合わせの船舶散乱強度データに示される船舶散乱波の推定強度より大きい入射角の範囲を海面入射角として判定する海面入射角判定処理と、
偏波組み合わせ毎に、当該偏波組み合わせの複数の船舶推定領域のうち当該偏波組み合わせの船舶入射角に対応する当該レーダ画像の画素領域に含まれる船舶推定領域を船舶候補領域として抽出し、当該偏波組み合わせの複数の船舶特定領域のうち当該偏波組み合わせの海面入射角に対応する当該レーダ画像の画素領域に含まれる船舶特定領域を船舶候補領域として抽出する船舶候補領域抽出処理と、
偏波組み合わせ毎に、当該偏波組み合わせの複数の船舶候補領域それぞれの領域値として当該船舶候補領域に対応する入射角の推定強度比を当該偏波組み合わせの推定強度比データから取得する船舶候補領域値取得処理と、
複数の偏波組み合わせの複数の船舶候補領域のうち2つ以上の船舶候補領域が重複する重複領域に対応する二次元領域に当該2つ以上の船舶候補領域の領域値を合計した合計値を設定し、他の船舶候補領域と重複しない船舶候補領域に対応する二次元領域に当該船舶候補領域の領域値を設定した二次元のマップデータを合算マップとして生成する合算マップ生成処理と、
前記合算マップ内の二次元領域のうち所定の探知閾値より大きい領域値が設定された二次元領域を船舶を表示する船舶領域として特定する船舶領域特定処理と
をコンピュータに実行させる船舶探知プログラム。
【請求項6】
前記船舶探知プログラムは、さらに、
偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像を生成するために使用されたレーダの観測データを記憶する観測データ記憶部を用い、
前記船舶探知プログラムは、さらに、
偏波組み合わせ毎に、当該偏波組み合わせのレーダ画像に対応する観測データに基づいて、前記船舶領域に表示される船舶の速度を船舶推定速度として所定の船舶速度推定アルゴリズムによって算出する船舶推定速度算出処理と、
偏波組み合わせ毎に、当該偏波組み合わせの航跡推定領域に基づいて、前記船舶領域に表示される船舶の速度を船舶航跡推定速度として所定の船舶航跡速度推定アルゴリズムによって算出する船舶航跡推定速度算出処理と、
偏波組み合わせ毎に、当該偏波組み合わせの船舶入射角に対応する当該レーダ画像の画素領域に前記船舶領域が含まれる場合、前記船舶推定速度に前記船舶領域に対応する入射角の推定強度比を乗算した値を船舶強度比速度として算出し、当該偏波組み合わせの海面入射角に対応する当該レーダ画像の画素領域に前記船舶領域が含まれる場合、前記船舶航跡推定速度に前記船舶領域に対応する入射角の推定強度比を乗算した値を船舶強度比速度として算出する船舶強度比速度算出処理と、
複数の偏波組み合わせの複数の船舶強度比速度を合計した船舶強度比速度の合計値を算出し、複数の船舶強度比速度を算出するために使用した複数の推定強度比を合計した推定強度比の合計値を算出し、船舶強度比速度の合計値を推定強度比の合計値で除算した値を前記船舶領域に表示される船舶の速度として算出する船舶速度算出処理とをコンピュータに実行させる
ことを特徴とする請求項5記載の船舶探知プログラム。
【請求項7】
船舶と海面とのいずれかで散乱してレーダに入射した電磁波の強度を電磁波の入射角に対応する画素領域に設定した画像データをレーダ画像として記憶するレーダ画像記憶部と、
船舶で散乱してレーダに入射する船舶散乱波の推定強度を入射角に対応付けて示す船舶散乱強度データと、海面で散乱してレーダに入射する海面散乱波の推定強度を入射角に対応付けて示す海面散乱強度データとを記憶する散乱強度データ記憶部を用いる船舶探知プログラムにおいて、
前記レーダ画像に基づいて、複数の船舶を表示する複数の画素領域を複数の船舶推定領域として所定の船舶領域推定アルゴリズムによって算出する船舶推定領域算出処理と、
前記レーダ画像に基づいて、複数の航跡を表示する複数の画素領域を複数の航跡推定領域として所定の航跡領域推定アルゴリズムによって算出する航跡推定領域算出処理と、
複数の航跡推定領域に基づいて複数の船舶を表示する複数の画素領域を複数の船舶特定領域として特定する船舶特定領域算出処理と、
前記船舶散乱強度データに示される船舶散乱波の推定強度が前記海面散乱強度データに示される海面散乱波の推定強度より大きい入射角の範囲を船舶入射角として判定する船舶入射角判定処理と、
前記海面散乱強度データに示される海面散乱波の推定強度が前記船舶散乱強度データに示される船舶散乱波の推定強度より大きい入射角の範囲を海面入射角として判定する海面入射角判定処理と、
複数の船舶推定領域のうち前記船舶入射角に対応する前記レーダ画像の画素領域に含まれる船舶推定領域と、複数の船舶特定領域のうち前記海面入射角に対応する前記レーダ画像の画素領域に含まれる船舶特定領域とを船舶を表示する船舶領域として特定する船舶領域特定処理と
をコンピュータに実行させる船舶探知プログラム。
【請求項8】
前記船舶探知プログラムは、さらに、
前記レーダ画像を生成するために使用されたレーダの観測データを記憶する観測データ記憶部を用い、
前記船舶探知プログラムは、さらに、
前記レーダ画像に対応する観測データに基づいて、前記船舶領域に表示される船舶の速度を船舶推定速度として所定の船舶速度推定アルゴリズムによって算出する船舶推定速度算出処理と、
前記航跡推定領域に基づいて、前記船舶領域に表示される船舶の速度を船舶航跡推定速度として所定の船舶航跡速度推定アルゴリズムによって算出する船舶航跡推定速度算出処理と、
前記船舶入射角に対応する前記レーダ画像の画素領域に前記船舶領域が含まれる場合、前記船舶推定速度を船舶の速度として選択し、前記海面入射角に対応する前記レーダ画像の画素領域に前記船舶領域が含まれる場合、前記船舶航跡推定速度を船舶の速度として選択する船舶速度選択処理とをコンピュータに実行させる
ことを特徴とする請求項7記載の船舶探知プログラム。
【請求項9】
船舶が航行する海面に向けてレーダから出射された出射偏波の振動方向と、船舶と海面とのいずれかで散乱してレーダに入射した入射偏波の振動方向とを組み合わせた偏波組み合わせ毎に、入射偏波の強度を入射偏波の入射角に対応する画素領域に設定した画像データをレーダ画像として記憶するレーダ画像記憶部と、
偏波組み合わせ毎に、船舶で散乱してレーダに入射する船舶散乱波の推定強度を入射角に対応付けて示す船舶散乱強度データと、海面で散乱してレーダに入射する海面散乱波の推定強度を入射角に対応付けて示す海面散乱強度データとを記憶する散乱強度データ記憶部とを備える船舶探知装置の船舶探知方法において、
推定強度比算出部が、偏波組み合わせ毎に、当該偏波組み合わせの船舶散乱強度データと当該偏波組み合わせの海面散乱強度データとに基づいて船舶散乱波の推定強度と海面散乱波の推定強度との比率を推定強度比として入射角に対応付けて算出し、算出した推定強度比を入射角に対応付けて示す推定強度比データを生成し、
船舶推定領域算出部が、偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像に基づいて、複数の船舶を表示する複数の画素領域を複数の船舶推定領域として所定の船舶領域推定アルゴリズムによって算出し、
航跡推定領域算出部が、偏波組み合わせ毎に、当該偏波組み合わせに対応するレーダ画像に基づいて、複数の航跡を表示する複数の画素領域を複数の航跡推定領域として所定の航跡領域推定アルゴリズムによって算出し、
船舶特定領域算出部が、偏波組み合わせ毎に、複数の航跡推定領域に基づいて複数の船舶を表示する複数の画素領域を複数の船舶特定領域として特定し、
船舶入射角判定部が、偏波組み合わせ毎に、当該偏波組み合わせの船舶散乱強度データに示される船舶散乱波の推定強度が当該偏波組み合わせの海面散乱強度データに示される海面散乱波の推定強度より大きい入射角の範囲を船舶入射角として判定し、
海面入射角判定部が、偏波組み合わせ毎に、当該偏波組み合わせの海面散乱強度データに示される海面散乱波の推定強度が当該偏波組み合わせの船舶散乱強度データに示される船舶散乱波の推定強度より大きい入射角の範囲を海面入射角として判定し、
船舶候補領域抽出部が、偏波組み合わせ毎に、当該偏波組み合わせの複数の船舶推定領域のうち当該偏波組み合わせの船舶入射角に対応する当該レーダ画像の画素領域に含まれる船舶推定領域を船舶候補領域として抽出し、当該偏波組み合わせの複数の船舶特定領域のうち当該偏波組み合わせの海面入射角に対応する当該レーダ画像の画素領域に含まれる船舶特定領域を船舶候補領域として抽出し、
船舶候補領域値取得部が、偏波組み合わせ毎に、当該偏波組み合わせの複数の船舶候補領域それぞれの領域値として当該船舶候補領域に対応する入射角の推定強度比を当該偏波組み合わせの推定強度比データから取得し、
合算マップ生成部が、複数の偏波組み合わせの複数の船舶候補領域のうち2つ以上の船舶候補領域が重複する重複領域に対応する二次元領域に当該2つ以上の船舶候補領域の領域値を合計した合計値を設定し、他の船舶候補領域と重複しない船舶候補領域に対応する二次元領域に当該船舶候補領域の領域値を設定した二次元のマップデータを合算マップとして生成し、
船舶領域特定部が、前記合算マップ内の二次元領域のうち所定の探知閾値より大きい領域値が設定された二次元領域を船舶を表示する船舶領域として特定する
ことを特徴とする船舶探知装置の船舶探知方法。
【請求項10】
船舶と海面とのいずれかで散乱してレーダに入射した電磁波の強度を電磁波の入射角に対応する画素領域に設定した画像データをレーダ画像として記憶するレーダ画像記憶部と、
船舶で散乱してレーダに入射する船舶散乱波の推定強度を入射角に対応付けて示す船舶散乱強度データと、海面で散乱してレーダに入射する海面散乱波の推定強度を入射角に対応付けて示す海面散乱強度データとを記憶する散乱強度データ記憶部とを備える船舶探知装置の船舶探知方法において、
船舶推定領域算出部が、前記レーダ画像に基づいて、複数の船舶を表示する複数の画素領域を複数の船舶推定領域として所定の船舶領域推定アルゴリズムによって算出し、
航跡推定領域算出部が、前記レーダ画像に基づいて、複数の航跡を表示する複数の画素領域を複数の航跡推定領域として所定の航跡領域推定アルゴリズムによって算出し、
船舶特定領域算出部が、複数の航跡推定領域に基づいて複数の船舶を表示する複数の画素領域を複数の船舶特定領域として特定し、
船舶入射角判定部が、前記船舶散乱強度データに示される船舶散乱波の推定強度が前記海面散乱強度データに示される海面散乱波の推定強度より大きい入射角の範囲を船舶入射角として判定し、
海面入射角判定部が、前記海面散乱強度データに示される海面散乱波の推定強度が前記船舶散乱強度データに示される船舶散乱波の推定強度より大きい入射角の範囲を海面入射角として判定し、
船舶領域特定部が、複数の船舶推定領域のうち前記船舶入射角に対応する前記レーダ画像の画素領域に含まれる船舶推定領域と、複数の船舶特定領域のうち前記海面入射角に対応する前記レーダ画像の画素領域に含まれる船舶特定領域とを船舶を表示する船舶領域として特定する
ことを特徴とする船舶探知装置の船舶探知方法。
【図1】


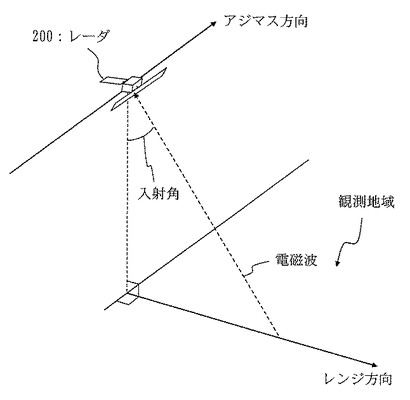
【図2】
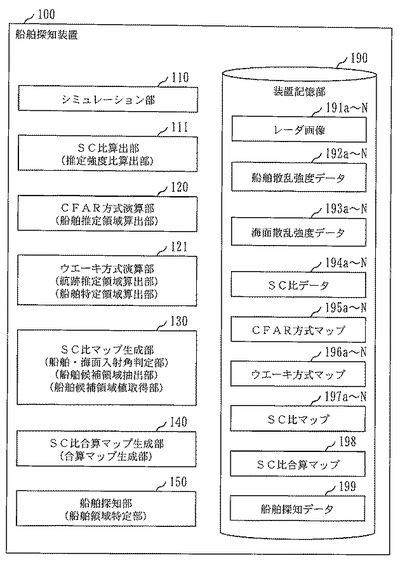
【図3】
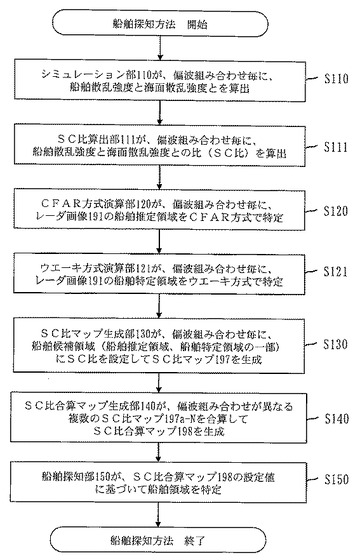
【図4】
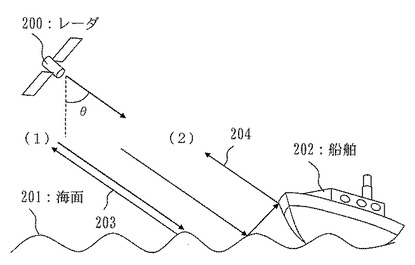
【図5】
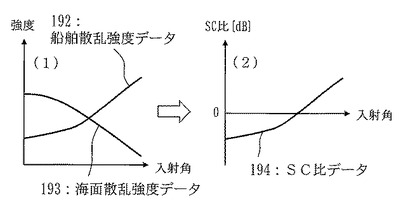
【図6】
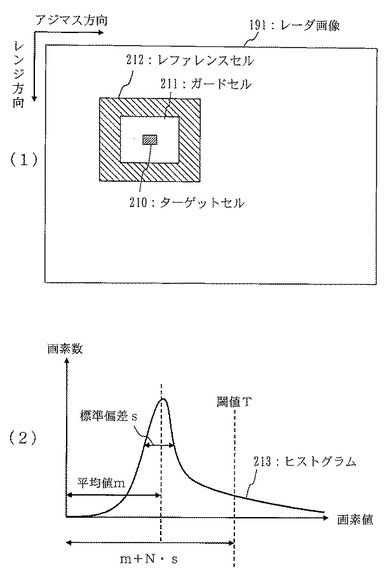
【図7】
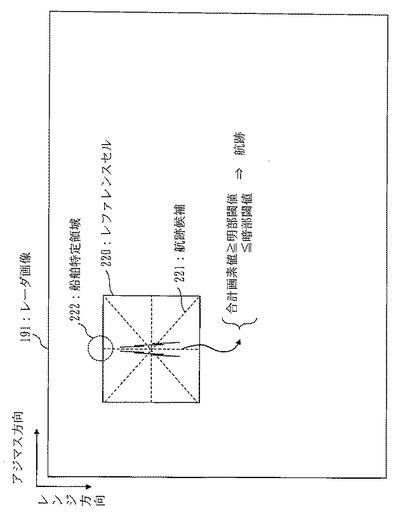
【図8】
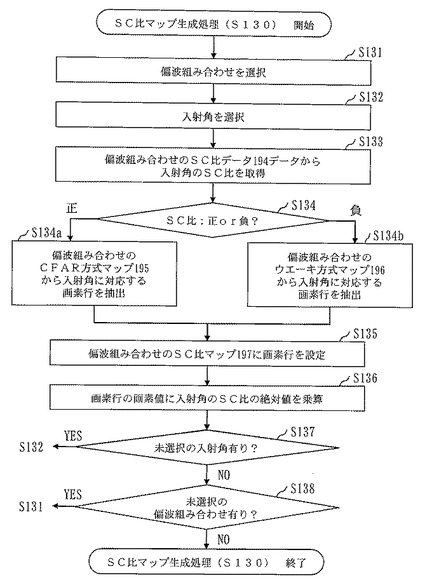
【図9】
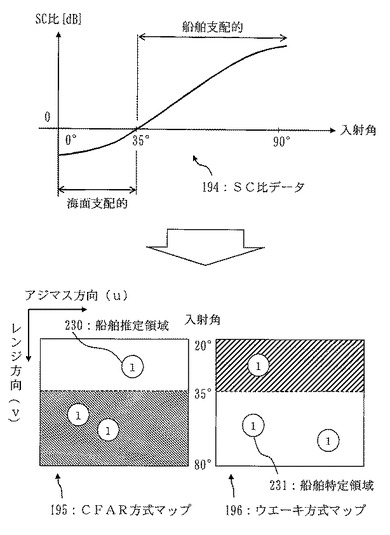
【図10】
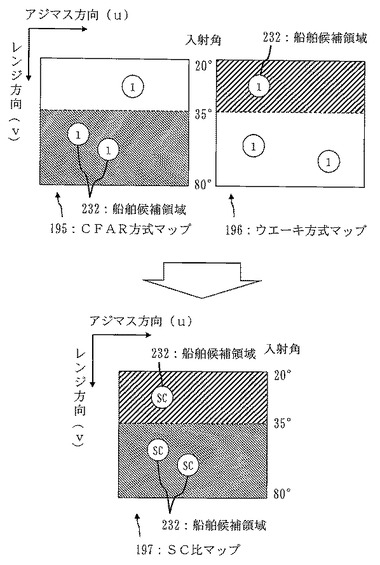
【図11】
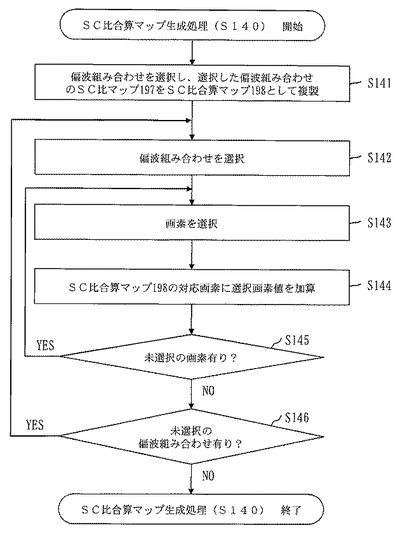
【図12】
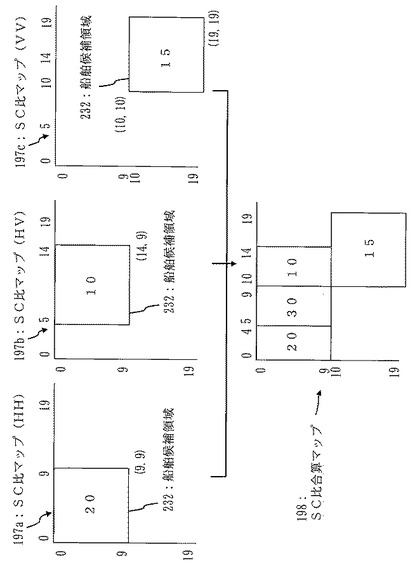
【図13】
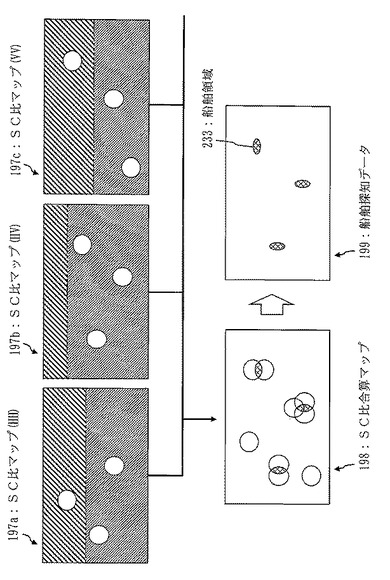
【図14】
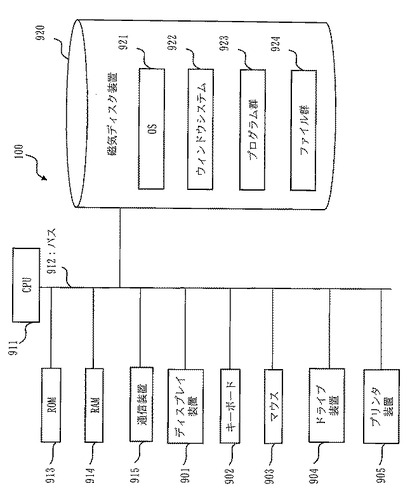
【図15】
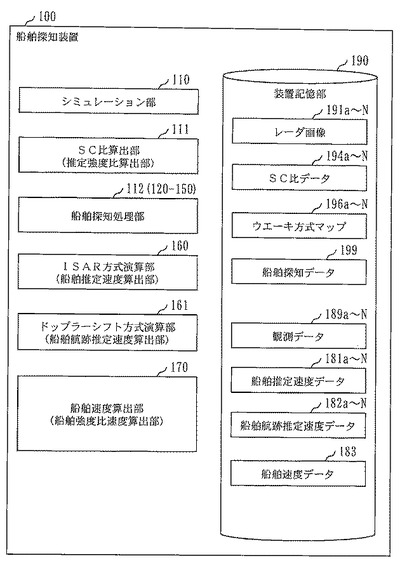
【図16】
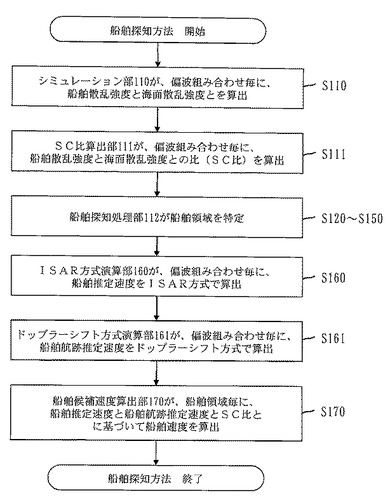
【図17】
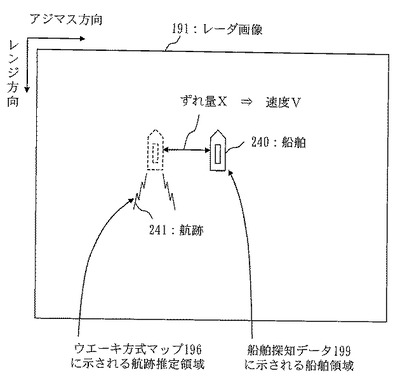
【図18】
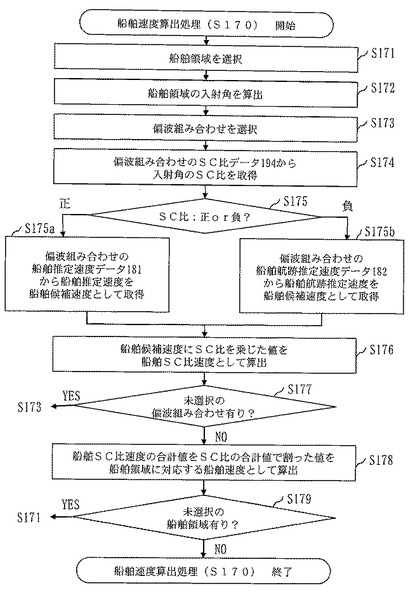
【図19】
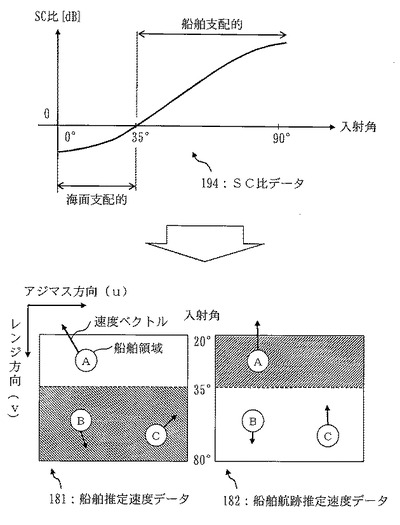
【図20】
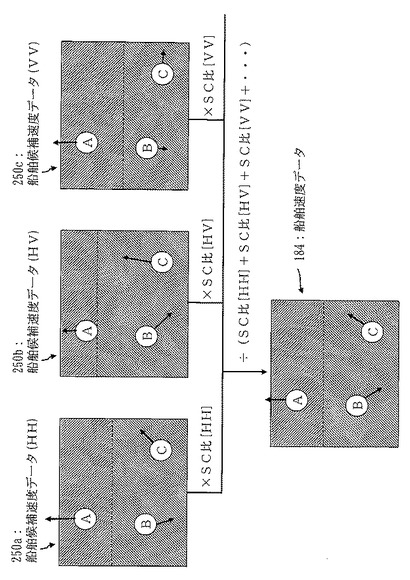
【図21】
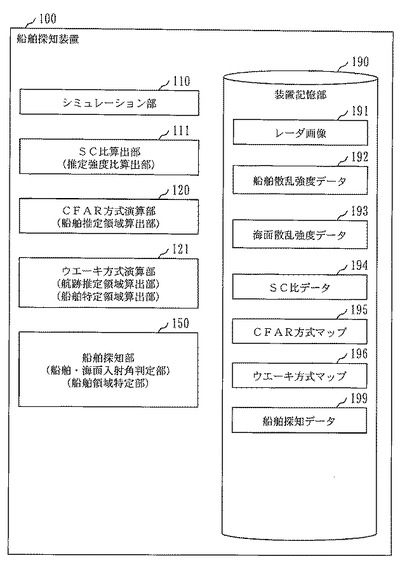
【図22】
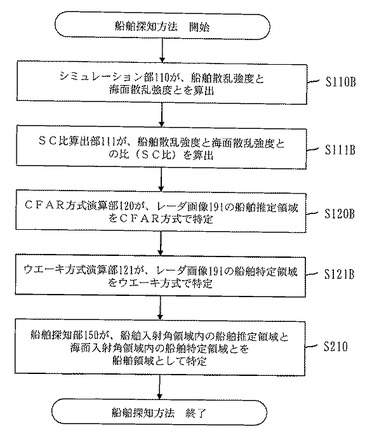
【図23】
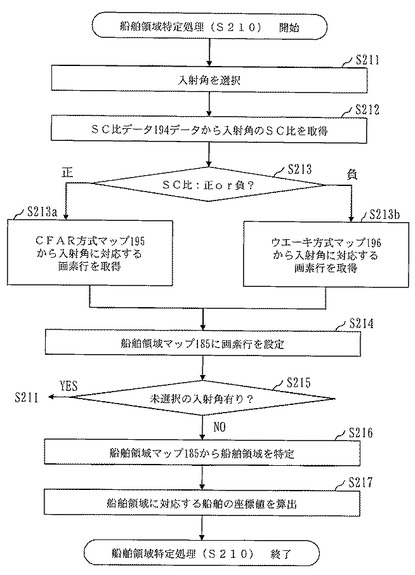
【図24】
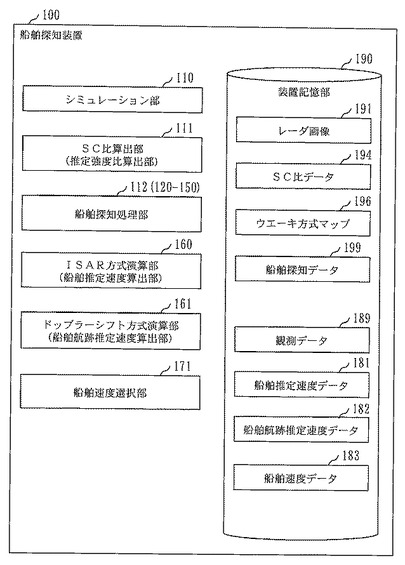
【図25】
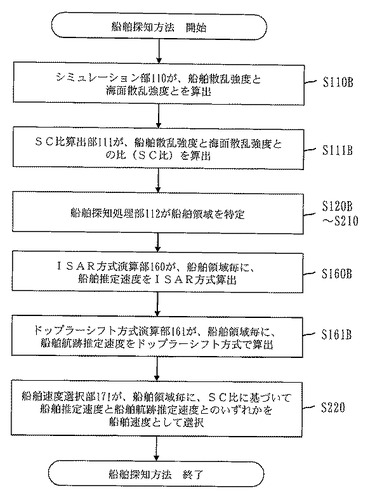
【図26】
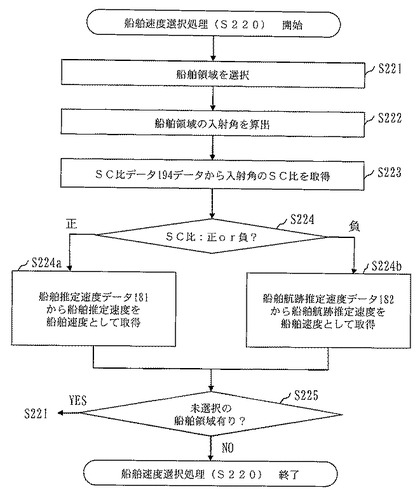
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【公開番号】特開2012−63196(P2012−63196A)
【公開日】平成24年3月29日(2012.3.29)
【国際特許分類】
【出願番号】特願2010−206535(P2010−206535)
【出願日】平成22年9月15日(2010.9.15)
【出願人】(591102095)三菱スペース・ソフトウエア株式会社 (148)
【Fターム(参考)】
【公開日】平成24年3月29日(2012.3.29)
【国際特許分類】
【出願日】平成22年9月15日(2010.9.15)
【出願人】(591102095)三菱スペース・ソフトウエア株式会社 (148)
【Fターム(参考)】
[ Back to top ]