
船舶推進機の操舵装置、船舶推進機、および船舶
【課題】操舵感の良好な船舶推進機の操舵装置を提供すること。
【解決手段】操舵装置6は、操船者によって操作される操舵レバー12と、操舵レバー12に連結された第1ピストンロッド29を含む第1シリンダ15と、第1ピストンロッド29の移動に伴って相対移動される第2ピストンロッド35および第2シリンダチューブ31を含む第2シリンダ16とを含む。船外機5は、第2ピストンロッド35および第2シリンダチューブ31の相対移動に伴って操舵される。
【解決手段】操舵装置6は、操船者によって操作される操舵レバー12と、操舵レバー12に連結された第1ピストンロッド29を含む第1シリンダ15と、第1ピストンロッド29の移動に伴って相対移動される第2ピストンロッド35および第2シリンダチューブ31を含む第2シリンダ16とを含む。船外機5は、第2ピストンロッド35および第2シリンダチューブ31の相対移動に伴って操舵される。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、船舶推進機を操舵する操舵装置、この操舵装置を備えた船舶推進機、およびこの船舶推進機を備えた船舶に関する。
【背景技術】
【0002】
船舶は、船体を推進させる船舶推進機と、この船舶推進機を操舵する操舵装置とを備えている。特許文献1に記載の操舵装置は、操船者によって操作されるティラーハンドルと、ティラーハンドルの動作を伝達する複数の歯車と、複数の歯車から伝達されたティラーハンドルの動作を伝達するチェーンおよびスプロケットとを備えている。さらに、この操舵装置は、チェーンおよびスプロケットから伝達されたティラーハンドルの動作を油圧に変換するハンドル側油圧シリンダと、ハンドル側油圧シリンダから伝達された油圧によって船外機を左右に回動させる船外機側油圧シリンダとを備えている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−105212号公報
【発明の概要】
【課題を解決するための手段】
【0004】
ティラーハンドルやステアリングホイールなどの操舵部材は、操船者によって操作される。操舵部材を保持する力、すなわち、操舵部材がステアリングホイールである場合には、回転方向への抵抗力が大きいと、操船者は、大きな力で操舵部材を操作しなければならない。これとは反対に、操舵部材を保持する力が小さいと、操舵部材が簡単に動いてしまうので、操船者は操舵部材を操作しづらい。したがって、操舵部材を保持する力には、最適な範囲が存在する。さらに、直観的な操舵感を操船者に与えるために、操舵部材から操船者に加わる操舵反力は、操舵部材の操作速度に応じて増加することが好ましい。すなわち、操船者が操舵部材を素早く操作したときには、操舵部材をゆっくり操作したときよりも大きな操舵反力が、操船者に瞬時に加わることが好ましい。
【0005】
特許文献1に記載の操舵装置では、ティラーハンドルが、複数の歯車、チェーン、およびスプロケットを介して、ハンドル側油圧シリンダに連結されている。ティラーハンドルが操作されると、ハンドル側油圧シリンダで発生した抵抗力(油圧)が、複数の歯車、チェーン、およびスプロケットを介して、ティラーハンドルに伝達される。そして、ティラーハンドルに伝達された抵抗力は、操舵反力として操船者に加わる。しかしながら、歯車などの多数の部材が、ティラーハンドルとハンドル側油圧シリンダとの間に介在しているので、ハンドル側油圧シリンダで抵抗力が発生してから、この抵抗力がティラーハンドルに伝達されるまでに、時間差(タイムラグ)が生じる。そのため、特許文献1に記載の操舵装置では、直観的な操舵感が得られない。
【0006】
そこで、この発明の目的は、操舵感の良好な船舶推進機の操舵装置、船舶推進機、および船舶を提供することである。
前記目的を達成するための本発明の一実施形態は、操船者によって操作される操舵レバーと、前記操舵レバーに連結された第1ピストンロッドを含む第1シリンダと、前記第1ピストンロッドの移動に伴って相対移動される第2シリンダチューブおよび第2ピストンロッドを含み、前記第2シリンダチューブおよび第2ピストンロッドの相対移動に伴って船舶推進機を操舵する第2シリンダとを含む、船舶推進機の操舵装置を提供する。
【0007】
この構成によれば、第1シリンダの第1ピストンロッドが、操舵レバーに連結されているので、操舵レバーが操作されると、第1ピストンロッドが移動する。第2シリンダの第2シリンダチューブおよび第2ピストンロッドは、第1ピストンロッドの移動に伴って相対移動される。船舶推進機は、第2シリンダチューブおよび第2ピストンロッドの相対移動に伴って操舵される。したがって、操船者は、操舵レバーを操作することにより、船舶推進機を操舵できる。さらに、操舵レバーの操作に伴って第1ピストンロッドが移動するので、操舵レバーに摩擦力を与える摩擦部材や、操舵レバーの操作に伴って弾性変形する弾性部材が設けられている場合とは異なり、操舵レバーの操作速度に比例する大きさの操舵反力が、第1シリンダから操舵レバーに直接伝達される。そのため、操舵装置は、直観的な操舵感を瞬時に操船者に与えることができる。これにより、操舵感を高めることができる。
【0008】
前記操舵レバーは、該レバーが船体に対して前記第1ピストンロッドの往復方向に揺動できるように前記船体に連結される支点部を含んでいてもよい。前記支点部は、前記操舵レバーの端部であってもよいし、前記操舵レバーの中間部であってもよい。この構成によれば、操舵レバーは、船体に対して支点部を中心に揺動するように操作される。さらに、操舵レバーの支点部が、第1ピストンロッドの往復方向に揺動できるように船体に連結されているので、操舵レバーが操作されると、第1ピストンロッドが往復方向に移動する。したがって、操舵レバーが操作されると、操舵レバーの操作速度に比例する大きさの操舵反力が、第1シリンダから操舵レバーに直接伝達される。そのため、操舵装置は、直観的な操舵感を操船者に与えることができる。
【0009】
前記第1ピストンロッドは、前記操舵レバーに対して回転可能に連結されていてもよい。
また、前記第1シリンダは、前記船体に対して回転可能に連結される第1シリンダチューブを含んでいてもよい。
また、前記操舵レバーは、前記第1ピストンロッドに連結された連結部を含んでいてもよい。前記連結部は、前記第1ピストンロッドのストロークよりも小さい揺動幅で前記船体に対して揺動可能であってもよい。
【0010】
また、前記操舵レバーは、前記連結部に対して前記支点部とは反対側に配置された操舵グリップを含んでいてもよい。
また、前記操舵グリップから前記連結部までの距離は、前記支点部から前記連結部までの距離より大きくてもよい。
また、前記操舵レバーは、鉛直面または水平面に沿って配置されていてもよい。
【0011】
また、前記操舵装置は、前記第1シリンダと前記第2シリンダとに接続されており、作動流体が流通する配管をさらに含んでいてもよい。この構成によれば、操舵レバーが操作され、第1ピストンロッドが移動すると、第1シリンダ内の作動流体が、配管内に排出される。そして、配管内に排出された作動流体は、第2シリンダ内に供給される。そのため、第2シリンダ内で流体圧が発生し、第2シリンダチューブおよび第2ピストンロッドが相対移動する。これにより、船舶推進機が操舵される。
【0012】
前記操舵装置は、前記配管に取り付けられており、前記第1シリンダから前記第2シリンダに伝達される流体圧を増幅可能なポンプユニットをさらに含んでいてもよい。この構成によれば、操舵レバーが操作されたときに第1シリンダから第2シリンダに伝達される流体圧が、ポンプユニットによって増幅されるので、船舶推進機を操舵するために操船者が操舵レバーに加える操作力を減少させることができる。したがって、船舶推進機が大型で高重量であったとしても、操船者は、比較的小さな力で船舶推進機を操舵できる。
【0013】
前記ポンプユニットは、前記第1シリンダで発生した流体圧に応じて前記第2シリンダに伝達される流体圧を調整可能であってもよい。たとえば、前記ポンプユニットは、前記第1シリンダから前記第2シリンダに伝達される流体圧を一定の割合で増幅させてもよいし、前記第1シリンダで発生した流体圧に応じて、流体圧の増幅率を増加または減少させてもよい。
【0014】
前記操舵装置は、前記操舵レバーの位置を検出するレバー位置検出装置と、前記第2シリンダに接続されており、作動流体が流通する出力配管と、前記出力配管を介して前記第2シリンダに接続されたポンプユニットをさらに含んでいてもよい。前記ポンプユニットは、前記操舵レバーが操作されたときに前記レバー位置検出装置の出力に基づいて前記第2シリンダに作動流体を供給することにより、前記操舵レバーの移動量に対応する移動量で前記第2シリンダチューブおよび第2ピストンロッドを相対移動させてもよい。この構成によれば、ポンプユニットは、レバー位置検出装置の出力に基づいて操舵レバーの移動を検出する。そして、ポンプユニットは、レバー位置検出装置の出力に基づいて出力配管から第2シリンダに作動流体を供給することにより、操舵レバーの移動量に対応する移動量で第2シリンダチューブおよび第2ピストンロッドを相対移動させる。これにより、操舵レバーの移動量に対応する移動量で船舶推進機が操舵される。
【0015】
前記操舵レバーが操作されたとき、前記ポンプユニットは、前記操舵レバーの移動量に対応する予め定められた移動量で前記第2シリンダチューブおよび第2ピストンロッドを相対移動させてもよい。また、前記操舵レバーが操作されたとき、前記第2シリンダチューブおよび第2ピストンロッドの実際の相対位置が、前記ポンプユニットにフィードバックされ、実際の相対位置が目標位置に近づくように、前記第2シリンダチューブおよび第2ピストンロッドが相対移動されてもよい。
【0016】
具体的には、前記操舵装置は、前記レバー位置検出装置、出力配管、およびポンプユニットに加えて、前記第2シリンダチューブおよび第2ピストンロッドの相対位置を検出するシリンダ位置検出装置をさらに含んでいてもよい。この場合、前記ポンプユニットは、前記レバー位置検出装置およびシリンダ位置検出装置からの出力に基づいて、前記第2シリンダチューブおよび第2ピストンロッドを相対移動させることにより、前記船舶推進機の目標位置と前記船舶推進機の現在位置との差を減少させてもよい。この構成によれば、ポンプユニットは、操舵レバーの位置と、第2シリンダチューブおよび第2ピストンロッドの相対位置とに基づいて、第2シリンダチューブおよび第2ピストンロッドを相対移動させる。そして、ポンプユニットは、船舶推進機の目標位置と船舶推進機の現在位置との差を減少させる。すなわち、船舶推進機の現在位置がポンプユニットにフィードバックされ、船舶推進機が確実に目標位置に近づけられる。そのため、船舶の航走方向を精度よく制御できる。
【0017】
また、前記操舵装置は、前記レバー位置検出装置、出力配管、およびポンプユニットに加えて、前記第1シリンダと前記ポンプユニットとに接続されており、作動流体が流通する入力配管をさらに含んでいてもよい。この構成によれば、操舵レバーが操作されると、第1シリンダ内の作動流体が、入力配管内に排出される。そして、入力配管内に排出された作動流体は、ポンプユニットおよび出力配管を介して、第2シリンダ内に供給される。そのため、第2シリンダチューブおよび第2ピストンロッドが相対移動し、船舶推進機が操舵される。したがって、操舵装置は、ポンプユニットに異常が生じたとしても、船舶推進機を操舵できる。
【0018】
前記第1シリンダは、油圧シリンダであってもよいし、エアシリンダであってもよい。同様に、前記第2シリンダは、油圧シリンダであってもよいし、エアシリンダであってもよい。オイルや空気などの作動流体が、第1シリンダと第2シリンダとの間を移動する場合、第1シリンダおよび第2シリンダは、同種のシリンダである。たとえば第1シリンダが油圧シリンダである場合、第2シリンダも油圧シリンダである。一方、作動流体が、第1シリンダと第2シリンダとの間を移動しない場合、第1シリンダおよび第2シリンダは、同種のシリンダであってもよいし、異なる種類のシリンダであってもよい。たとえば第1シリンダが油圧シリンダである場合、第2シリンダは、油圧シリンダであってもよいし、エアシリンダであってもよい。
【0019】
本発明の他の実施形態は、前記操舵装置と、前記操舵装置によって操舵される船外機とを含む、船舶推進機を提供する。この構成によれば、前述の効果と同様な効果を奏することができる。
本発明のさらに他の実施形態は、前記船舶推進機と、前記船外機が取り付けられた船体とを含む、船舶を提供する。この構成によれば、前述の効果と同様な効果を奏することができる。
【図面の簡単な説明】
【0020】
【図1】この発明の第1実施形態に係る船舶の模式的な斜視図である。
【図2】この発明の第1実施形態に係る操舵装置の模式的な回路図である。
【図3】この発明の第2実施形態に係る操舵装置の模式的な回路図である。
【図4】この発明の第3実施形態に係る操舵装置の模式的な回路図である。
【図5】この発明の第4実施形態に係る操舵装置の模式的な回路図である。
【発明を実施するための形態】
【0021】
以下では、この発明の実施形態を、添付図面を参照して詳細に説明する。
以下の説明における「前後方向」「左右方向」および「上下方向」は、船体2を基準とする方向である。
[第1実施形態]
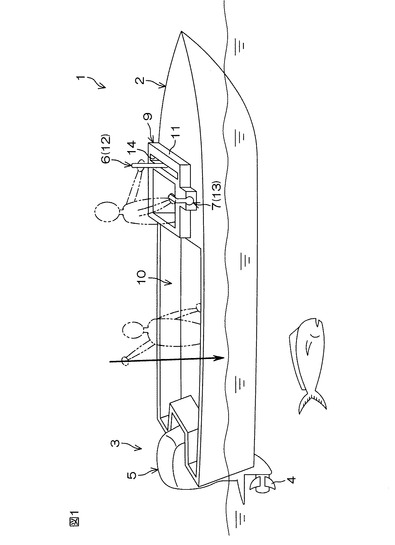
図1は、この発明の第1実施形態に係る船舶1の模式的な斜視図である。
【0022】
船舶1は、日本ではシイラと呼ばれるマヒマヒ(Mahi-mahi 学名 Coryphaena hippurus)などの水面近くを泳ぐ魚を船上から銛で突いて捕獲するときに用いられる小型のボートである。船舶1は、船体2と、船体2を推進させる船舶推進機3とを備えている。船舶推進機3は、プロペラ4を回転させることによって推力を発生する船外機5と、船外機5を操舵する操舵装置6と、船外機5の推力を調整する速度調整装置7とを含む。船外機5は、ブラケット8(図2参照)によって船体2の船尾に取り付けられている。船外機5は、船体2に対して左右に回動可能である。操舵装置6は、船体2に対して船外機5を左右に回動させることにより、船外機5を操舵する。また、速度調整装置7は、プロペラ4の回転速度および回転方向を変更させることにより、船外機5の推力を調整する。
【0023】
船体2は、操船者を収容する操船部9と、操船部9と船尾との間に配置された乗船部10とを含む。操船部9は、操船者の臀部付近を取り囲む筒状の周壁11を含む。操舵装置6は、操船部9に配置された操舵レバー12を含み、速度調整装置7は、操船部9に配置された速度調整レバー13を含む。操舵レバー12および速度調整レバー13は、操船者によって操作される。操舵レバー12および速度調整レバー13は、船体2に取り付けられている。操舵レバー12は、鉛直面に沿って直線状に延びるバー(棒)であり、周壁11の前部に設けられた開口14から上方に突出している。開口14は、左右方向に延びるスロット状である。操舵レバー12は、船体2に対して左右に回動可能である。また、速度調整レバー13は、周壁11の側方に配置されている。速度調整レバー13は、船体2に対して前後に回動可能である。
【0024】
操舵装置6は、操舵レバー12の回動に伴って船外機5を左右に回動させる。たとえば操船者が操舵レバー12を右に倒すと、操舵装置6は、操舵レバー12の位置に対応する旋回角度で船舶1が右に旋回するように船外機5を回動させる。また、速度調整装置7は、速度調整レバー13の回動に伴ってプロペラ4の回転速度および回転方向を変更させる。たとえば操船者が速度調整レバー13を前に倒すと、速度調整装置7は、速度調整レバー13の位置に対応する速度で船舶1が前進するようにプロペラ4を回転させる。したがって、船舶1は、操舵レバー12および速度調整レバー13の操作によって操作される。
【0025】
後述するように、操舵装置6は、所定の保持力で操舵レバー12をその場で保持している。さらに、操舵装置6は、操舵レバー12の操作速度に比例する大きさの操舵反力を操舵レバー12から操船者に与える。すなわち、たとえば操船者が操舵レバー12を素早く操作すると、ゆっくり操作したときよりも大きな操舵反力が、操舵レバー12に加わる。船舶1が魚を追うとき、操船者は、周壁11と操舵レバー12とによって自身の体を支えながら、操舵レバー12を素早く操作する場合がある。このとき操舵レバー12が簡単に移動すると、すなわち、操舵レバー12を保持する力が弱いと、操船者は、自身の姿勢をしっかり保てない場合がある。したがって、操舵レバー12の操作速度に比例する大きさの操舵反力を発生させることにより、操船者の姿勢を確実に安定させることができる。
【0026】
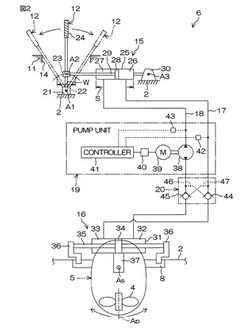
図2は、この発明の第1実施形態に係る操舵装置6の模式的な回路図である。
操舵装置6は、油圧式の操舵装置である。操舵装置6は、前述の操舵レバー12と、操舵レバー12に連結された第1シリンダ15と、船外機5に連結された第2シリンダ16と、第1シリンダ15および第2シリンダ16を連結する複数の配管17、18(右配管17および左配管18)とを含む。さらに、操舵装置6は、第1シリンダ15と第2シリンダ16との間で複数の配管17、18に取り付けられたポンプユニット19と、ポンプユニット19と第2シリンダ16との間で複数の配管17、18に取り付けられたロックバルブ20とを含む。第1シリンダ15および第2シリンダ16は、油圧シリンダである。第1シリンダ15、第2シリンダ16、右配管17、および左配管18の内部は、作動流体の一例であるオイルによって満たされている。
【0027】
操舵レバー12は、取付部材21を介して船体2に連結された支点部22と、支点部22の上方に配置された連結部23と、連結部23の上方に配置された操舵グリップ24とを含む。支点部22は、操舵レバー12の下端部であってもよいし、操舵レバー12の中間部であってもよい。支点部22は、船体2に対して揺動軸線A1まわりに左右に揺動可能である。揺動軸線A1は、支点部22を通る軸線であると共に、第1シリンダ15の第1ピストンロッド29の往復方向に直交する軸線である。したがって、操舵レバー12は、第1ピストンロッド29の往復方向に揺動可能に船体2に連結されている。支点部22は、周壁11に設けられた開口14より下方に配置されている。同様に、連結部23は、開口14より下方に配置されている。第1シリンダ15(具体的には、第1ピストンロッド29の先端部)は、連結部23に連結されている。したがって、第1シリンダ15は、開口14より下方で操舵レバー12に連結されている。操舵グリップ24は、開口14より上方に配置されている。操舵グリップ24は、操船者によって握られる。操舵グリップ24から連結部23までの距離は、支点部22から連結部23までの距離より大きい。
【0028】
操舵レバー12は、操舵レバー12が上下方向に延びる直進位置(図2において実線で示す位置)を中心に揺動軸線A1まわりに左右に揺動可能である。直進位置は、プロペラ4の回転軸線Apが平面視において前後方向に延びるように設定されている。すなわち、操舵レバー12の直進位置は、プロペラ4の回転軸線Apが平面視において前後方向に延びる船外機5の直進位置に対応付けられている。操舵レバー12が直進位置より右側に傾けられると、操舵装置6は、船舶1が右に旋回するように船外機5を回動させる。また、操舵レバー12が直進位置より左側に傾けられると、操舵装置6は、船舶1が左に旋回するように船外機5を回動させる。右最大操舵位置(図2において一点鎖線で示す位置)は、直進位置より右側で操舵レバー12が周壁11に接する位置であり、左最大操舵位置(図2において二点鎖線で示す位置)は、直進位置より左側で操舵レバー12が周壁11に接する位置である。すなわち、操舵レバー12の揺動幅は、周壁11によって規制される。第1シリンダ15は、操舵レバー12の揺動に伴って伸縮する。第1ピストンロッド29の先端部は、操舵レバー12の連結部23と共に揺動軸線A1まわりに揺動する。連結部23の揺動幅Wは、第1ピストンロッド29のストロークSよりも小さい。
【0029】
第1シリンダ15は、片ロッド型の複動シリンダである。第1シリンダ15は、第1シリンダチューブ25と、第1シリンダチューブ25内を第1右空間26と第1左空間27とに仕切る第1ピストン28と、第1ピストン28に連結された第1ピストンロッド29とを含む。右配管17は、第1右空間26に接続されており、左配管18は、第1左空間27に接続されている。第1ピストンロッド29の先端部は、第1シリンダチューブ25の一端部から第1シリンダ15の軸方向に突出している。第1ピストンロッド29の先端部は、操舵レバー12の連結部23に連結されている。第1ピストンロッド29の先端部は、連結部23に対して、第1ピストンロッド29の往復方向(第1シリンダ15の軸方向)に直交する回転軸線A2まわりに回転可能である。したがって、第1ピストンロッド29は、回転軸線A2まわりに回転可能に操舵レバー12に連結されている。また、第1シリンダチューブ25の他端部は、取付部材30を介して船体2に連結されている。第1シリンダチューブ25の他端部は、船体2に対して、回転軸線A2と平行な回転軸線A3まわりに回転可能である。したがって、第1シリンダチューブ25は、回転軸線A3まわりに回転可能に船体2に連結されている。回転軸線A2は、第1ピストンロッド29の先端部を通る軸線であり、回転軸線A3は、第1シリンダチューブ25の他端部を通る軸線である。
【0030】
第2シリンダ16は、両ロッド型の複動シリンダである。第2シリンダ16は、第2シリンダチューブ31と、第2シリンダチューブ31内を第2右空間32と第2左空間33とに仕切る第2ピストン34と、第2ピストン34に連結された第2ピストンロッド35とを含む。第2右空間32は、左配管18によって、第1シリンダ15の第1左空間27に接続されており、第2左空間33は、右配管17によって、第1シリンダ15の第1右空間26に接続されている。第2シリンダチューブ31および第2ピストンロッド35は、左右方向に延びている。第2ピストンロッド35の一端部および他端部は、それぞれ、第2シリンダチューブ31の一端部および他端部から軸方向外方に突出している。第2ピストンロッド35の一端部および他端部は、それぞれ、2つの固定アーム36に連結されている。2つの固定アーム36は、船外機5を船体2に取り付けるブラケット8等を介して船体2に固定されている。したがって、第2ピストンロッド35は、船体2に固定されている。また、第2シリンダチューブ31は、船外機5のステアリングアーム37に連結されている。第2シリンダチューブ31は、船体2に対して左右方向に移動可能である。ステアリングアーム37は、第2シリンダチューブ31と共に左右方向に移動する。船外機5は、左右方向へのステアリングアーム37の移動に伴って、船体2の後方で上下に延びるステアリング軸線Asまわりに左右に回動する。
【0031】
ポンプユニット19は、右配管17および左配管18の一方に取り付けられた油圧ポンプ38と、油圧ポンプ38を駆動する電動モータ39とを含む。さらに、ポンプユニット19は、駆動回路40を介して電動モータ39を制御する制御装置41と、右配管17および左配管18内の圧力を検出する2つの圧力センサー42、43(右圧力センサー42および左圧力センサー43)とを含む。油圧ポンプ38は、たとえば、第1シリンダ15側および第2シリンダ16側の両方向にオイルを吐出可能である。制御装置41は、電動モータ39に油圧ポンプ38を駆動させることにより、第1シリンダ15から第2シリンダ16に伝達される油圧を調整可能である。したがって、制御装置41は、第1シリンダ15から第2シリンダ16に伝達される油圧を増幅可能である。制御装置41は、2つの圧力センサー42、43の出力に基づいて電動モータ39を制御する。右圧力センサー42は、第1シリンダ15と油圧ポンプ38との間で右配管17に接続されており、左圧力センサー43は、第1シリンダ15と油圧ポンプ38との間で左配管18に接続されている。制御装置41は、たとえば右配管17内の圧力と左配管18内の圧力との差が減少するように、電動モータ39を制御する。すなわち、制御装置41は、第1シリンダ15から操舵レバー12に伝達される操舵反力を軽減させる。
【0032】
ロックバルブ20は、オイルの流通方向を制御するパイロットチェックバルブである。ロックバルブ20は、右配管17に取り付けられた右チェックバルブ44と、左配管18に取り付けられた左チェックバルブ45とを含む。右チェックバルブ44および左チェックバルブ45は、第1シリンダ15側から第2シリンダ16側にオイルを流通させ、第2シリンダ16側から第1シリンダ15側へのオイルの流れをせき止める。したがって、オイルの逆流は、ロックバルブ20によって防止される。右チェックバルブ44は、パイロット流路46を介して左配管18に接続されており、左チェックバルブ45は、パイロット流路47を介して右配管17に接続されている。左配管18内の圧力がパイロット圧に達すると、右チェックバルブ44が開き、右配管17内の圧力がパイロット圧に達すると、左チェックバルブ45が開く。たとえば、パイロット圧よりも高圧のオイルが、第1シリンダ15側から右チェックバルブ44に供給されると、右チェックバルブ44が開いて、第1シリンダ15側から供給されたオイルが右チェックバルブ44を通過する。それと共に、左チェックバルブ45が開いて、第2シリンダ16側から供給されたオイルが左チェックバルブ45を通過する。
【0033】
操舵レバー12が操作されると、第1シリンダチューブ25の他端部および第1ピストンロッド29の先端部がそれぞれ船体2および操舵レバー12に対して回転しながら、第1シリンダチューブ25および第1ピストンロッド29が軸方向に相対移動する。すなわち、操舵レバー12が操作されると、船体2に対する第1シリンダ15の姿勢が変化しながら、第1シリンダ15が伸縮する。操舵レバー12が右に操作されると、第1ピストン28および第1ピストンロッド29が、第1シリンダチューブ25に対して右に移動し、第1右空間26で油圧が発生する。そのため、第1右空間26内のオイルが、右配管17に排出される。このとき、制御装置41は、左配管18を介して油圧ポンプ38から第1左空間27にオイルを送ることにより、右配管17に排出されるオイルの圧力を増幅させる。そのため、油圧ポンプ38によって増幅された油圧が、右配管17を介して第1右空間26から第2左空間33に伝達される。これにより、第2シリンダチューブ31が船体2に対して左に移動する。そのため、第2右空間32で油圧が発生し、第2右空間32内のオイルが左配管18に排出される。そして、左配管18に排出されたオイルは、ロックバルブ20および油圧ポンプ38を介して第1左空間27に供給される。
【0034】
このように、操舵レバー12が右に操作されると、第2シリンダチューブ31が船体2に対して左に移動し、第2シリンダチューブ31および第2ピストンロッド35が軸方向に相対移動する。これにより、船外機5がステアリング軸線Asまわりに右に回動する。操舵レバー12が左に操作されたときも同様に、第1ピストンロッド29の移動に伴って第2シリンダチューブ31および第2ピストンロッド35が軸方向に相対移動し、船外機5がステアリング軸線Asまわりに左に回動する。このようにして、船外機5が左右に操舵される。さらに、第1シリンダ15から第2シリンダ16に伝達される油圧が、ポンプユニット19によって増幅されるので、船外機5が大型で高重量であったとしても、操船者は、比較的小さい操作力で船外機5を回動させることができる。しかも、オイルの逆流がロックバルブ20によって防止されるので、操舵レバー12の直進位置と船外機5の直進位置との位置関係が変化することを防止できる。
【0035】
以上のように第1実施形態では、第1シリンダ15の第1ピストンロッド29が、操舵レバー12に連結されているので、操舵レバー12が操作されると、第1シリンダチューブ25に対して第1ピストンロッド29が移動し、第1右空間26または第1左空間27内のオイルが、右配管17または左配管18に排出される。右配管17および左配管18の内径が、第1シリンダチューブ25の内径より小さいから、操舵レバー12が操作されると、操舵レバー12の操作速度に比例する大きさの操舵反力が、第1シリンダ15から操舵レバー12に直接加わる。これにより、操舵レバー12の操作速度に比例する大きさの操舵反力が、操船者に直接加わる。そのため、操舵装置6は、直観的な操舵感を瞬時に操船者に与えることができる。これにより、操舵感を高めることができる。
【0036】
[第2実施形態]
次に、本発明の第2実施形態について説明する。
第2実施形態と前述の第1実施形態との主要な相違点は、第1シリンダ15と第2シリンダ16との機械的な連結が解除されており、ポンプユニット19が、操舵レバー12の移動を検出して、第2シリンダチューブ31および第2ピストンロッド35を相対移動させることである。
【0037】
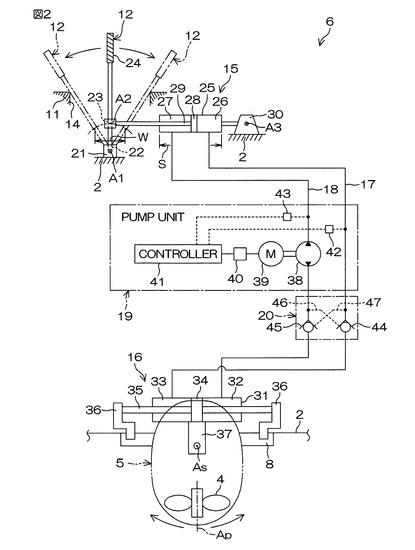
図3は、この発明の第2実施形態に係る操舵装置206の模式的な回路図である。この図3において、前述の図1〜図2に示された各部と同等の構成部分については、図1等と同一の参照符号を付してその説明を省略する。
第2実施形態に係る操舵装置206は、右配管17および左配管18を除き、第1実施形態に係る操舵装置6と同様の構成を備えている。すなわち、操舵装置206は、右配管17および左配管18に代えて、第1シリンダ15の第1右空間26と第1左空間27とを接続する接続配管248と、第2シリンダ16とポンプユニット19とを接続する複数の出力配管249、250(右出力配管249および左出力配管250)とを含む。さらに、操舵装置206は、操舵レバー12の位置を検出するレバー位置検出装置251と、第2シリンダチューブ31および第2ピストンロッド35の相対位置を検出するシリンダ位置検出装置252とをさらに含む。レバー位置検出装置251は、ポテンショメータであってもよいし、その他の形式の位置検出装置であってもよい。シリンダ位置検出装置252についても同様である。
【0038】
制御装置41は、レバー位置検出装置251およびシリンダ位置検出装置252の出力に基づいてポンプユニット19を制御する。レバー位置検出装置251は、操舵レバー12の位置を検出してもよいし、操舵レバー12と共に移動する部材の位置を検出することにより、操舵レバー12の位置を検出してもよい。たとえば、レバー位置検出装置251が、第1シリンダチューブ25および第1ピストンロッド29に取り付けられており、第1ピストンロッド29および第1シリンダチューブ25の相対位置に基づいて操舵レバー12の位置が検出されてもよい。同様に、シリンダ位置検出装置252は、第2シリンダチューブ31および第2ピストンロッド35の相対位置を検出してもよいし、第2シリンダチューブ31と共に移動する部材の位置を検出することにより、第2シリンダチューブ31および第2ピストンロッド35の相対位置を検出してもよい。船外機5は、第2シリンダチューブ31および第2ピストンロッド35の相対移動に伴って回動するから、制御装置41は、第2シリンダチューブ31および第2ピストンロッド35の相対位置を検出することにより、船外機5の位置を検出できる。
【0039】
制御装置41は、レバー位置検出装置251の出力に基づいて操舵レバー12の移動を検出する。操舵レバー12が操作されると、制御装置41は、レバー位置検出装置251の出力に基づいて電動モータ39を制御することにより、第2シリンダ16の第2右空間32または第2左空間33にオイルを供給させる。これにより、制御装置41は、操舵レバー12の移動量に対応する移動量で第2ピストンロッド35および第2シリンダチューブ31を相対移動させる。さらに、このとき、制御装置41は、シリンダ位置検出装置252からの出力に基づいて、第2シリンダチューブ31および第2ピストンロッド35の相対移動量を検出する。そして、制御装置41は、第2シリンダチューブ31および第2ピストンロッド35を相対移動させることにより、船外機5の目標位置と船外機5の現在位置との差を減少させて、船外機5の現在位置を船外機5の目標位置に一致させる。これにより、船舶1の航走方向が精度よく制御される。
【0040】
[第3実施形態]
次に、本発明の第3実施形態について説明する。
第3実施形態と前述の第2実施形態との主要な相違点は、第1シリンダ15と第2シリンダ16とが機械的に連結されており、非常操舵時(たとえば、油圧ポンプ38や電動モータ39の故障時)には、操舵装置306が、手動式の操舵装置として用いられることである。
【0041】
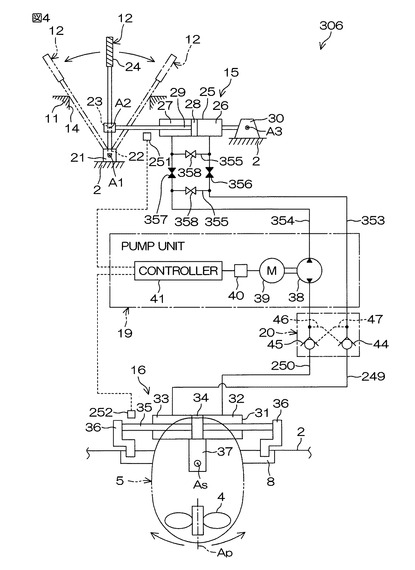
図4は、この発明の第3実施形態に係る操舵装置306の模式的な回路図である。この図4において、前述の図1〜図3に示された各部と同等の構成部分については、図1等と同一の参照符号を付してその説明を省略する。
第3実施形態に係る操舵装置306は、第2実施形態に係る操舵装置206と同様の構成を備えている。すなわち、操舵装置306は、第2実施形態に係る操舵装置206の構成に加えて、第1シリンダ15とポンプユニット19とを接続する複数の入力配管353、354(右入力配管353および左入力配管354)と、右入力配管353および左入力配管354を接続する2つのバイパス配管355とを含む。さらに、操舵装置306は、右入力配管353に取り付けられた右バルブ356と、左入力配管354に取り付けられた左バルブ357と、バイパス配管355に取り付けられたバイパスバルブ358とを含む。
【0042】
右バルブ356および左バルブ357は、常時閉のバルブであり、バイパスバルブ358は、常時開のバルブである。したがって、第1シリンダ15の第1右空間26および第1左空間27は、常時、接続状態にあり、第2シリンダ16に対して、常時、非接続状態にある。一方のバイパス配管355は、右バルブ356および左バルブ357より第1シリンダ15側で右入力配管353および左入力配管354に接続されている。他方のバイパス配管355は、右バルブ356および左バルブ357より第2シリンダ16側で右入力配管353および左入力配管354に接続されている。右バルブ356、左バルブ357、およびバイパスバルブ358は、手動弁であってもよいし、電磁弁であってもよい。
【0043】
通常操舵時には、右バルブ356および左バルブ357が閉じられており、バイパスバルブ358が開かれている。通常操舵時には、第2実施形態と同様に、制御装置41が、レバー位置検出装置251およびシリンダ位置検出装置252の出力に基づいて電動モータ39を制御することにより、船外機5を操舵レバー12に追従させる。一方、非常操舵時には、右バルブ356および左バルブ357が開かれ、バイパスバルブ358が閉じられる。すなわち、非常操舵時には、操舵装置306は、オイルが第1シリンダ15と第2シリンダ16との間を移動できる状態に切り替えられ、手動式の操舵装置として用いられる。
【0044】
[第4実施形態]
次に、本発明の第4実施形態について説明する。
第4実施形態と前述の第1実施形態との主要な相違点は、操舵レバー12に加えて、操船者によって操作されるステアリングホイール459が設けられていることである。
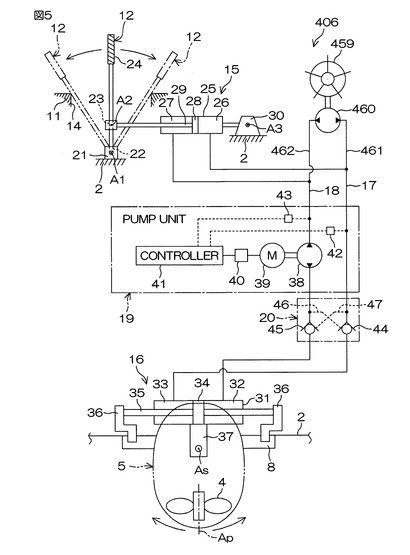
図5は、この発明の第4実施形態に係る操舵装置406の模式的な回路図である。この図5において、前述の図1〜図4に示された各部と同等の構成部分については、図1等と同一の参照符号を付してその説明を省略する。
【0045】
第4実施形態に係る操舵装置406は、第1実施形態に係る操舵装置6と同様の構成を備えている。すなわち、操舵装置406は、第1実施形態に係る操舵装置6の構成に加えて、操船者によって操作されるステアリングホイール459と、ステアリングホイール459の操作に伴ってオイルを吐出するヘルムポンプ460(helm pump)とを含む。さらに、操舵装置406は、ヘルムポンプ460と右配管17とを接続する右補助配管461と、ヘルムポンプ460と左配管18とを接続する左補助配管462とを含む。
【0046】
ステアリングホイール459は、ヘルムポンプ460に連結されている。ヘルムポンプ460は、ステアリングホイール459によって駆動される。ステアリングホイール459が、右まわりに操作されると、ヘルムポンプ460は、右補助配管461にオイルを吐出する。右補助配管461に吐出されたオイルは、右配管17を介して第2シリンダ16に供給される。それと共に、第2シリンダ16から排出されたオイルは、左補助配管462を介してヘルムポンプ460に供給される。これにより、船外機5がステアリング軸線Asまわりに右に回動する。ステアリングホイール459が左まわりに操作されたときも同様に、ヘルムポンプ460が、左補助配管462にオイルを吐出し、左補助配管462に供給されたオイルが、左配管18を介して第2シリンダ16に供給される。それと共に、第2シリンダ16から排出されたオイルは、右補助配管461を介してヘルムポンプ460に供給される。これにより、船外機5がステアリング軸線Asまわりに左に回動する。このように、船外機5は、操舵レバー12だけでなく、ステアリングホイール459によっても操作される。
【0047】
[他の実施形態]
この発明の実施形態の説明は以上であるが、この発明は、前述の第1〜第4実施形態の内容に限定されるものではなく、請求項記載の範囲内において種々の変更が可能である。
たとえば、前述の第1実施形態では、第1シリンダ15から第2シリンダ16に伝達される油圧を増幅するポンプユニット19が操舵装置6に設けられている場合について説明した。しかし、ポンプユニット19が設けられておらず、第1シリンダ15で発生した油圧によって第2シリンダ16が駆動されてもよい。すなわち、第1実施形態に係る操舵装置6は、ポンプユニット19が設けられていない手動式の操舵装置であってもよい。
【0048】
また、前述の第1〜第4実施形態では、操舵レバー12が鉛直な姿勢で船体2に保持されている場合について説明した。しかし、操舵レバー12は、水平な姿勢で船体2に保持されていてもよい。
また、前述の第1〜第4実施形態では、第1シリンダ15および第2シリンダ16が、油圧シリンダである場合について説明した。しかし、第1シリンダ15および第2シリンダ16は、エアシリンダであってもよい。
【0049】
また、前述の第1〜第4実施形態では、第2シリンダ16が、両ロッド型の複動シリンダである場合について説明した。しかし、第2シリンダ16は、片ロッド型の複動シリンダであってもよい。具体的には、第2シリンダ16は、船体2に固定されたシリンダチューブと、船外機5のステアリングアーム37に固定されたピストンロッドとを含む片ロッド型の複動シリンダであってもよい。
【0050】
また、前述の第1〜第4実施形態では、操舵装置が、1機の船外機5を操舵する場合について説明した。しかし、複数機の船外機5が、共通の操舵装置によって操舵されてもよい。
また、前述の第1〜第4実施形態では、ポンプユニット19が、油圧ポンプ38と、電動モータ39と、制御装置41とを含む場合について説明した。しかし、ポンプユニット19の構成はこれに限られない。具体的には、前述の第1〜第4実施形態では、油圧ポンプ38が、右配管17および左配管18の一方に取り付けられている場合について説明した。しかし、油圧ポンプ38は、方向制御弁を介して右配管17および左配管18の両方に接続されていてもよい。また、右配管17および左配管18にそれぞれ対応する2つの油圧ポンプ38が設けられていてもよい。
【0051】
その他、特許請求の範囲に記載された事項の範囲で種々の設計変更を施すことが可能である。
以下に、特許請求の範囲に記載された構成要素と前述の実施形態における構成要素との対応関係を示す。
操舵レバー:操舵レバー12
第1ピストンロッド:第1ピストンロッド29
第1シリンダ:第1シリンダ15
第2ピストンロッド:第2ピストンロッド35
第2シリンダチューブ:第2シリンダチューブ31
船舶推進機:船舶推進機3
第2シリンダ:第2シリンダ16
操舵装置:操舵装置6、206、306、406
船体:船体2
支点部:支点部22
第1シリンダチューブ:第1シリンダチューブ25
連結部:連結部23
操舵グリップ:操舵グリップ24
配管:右配管17、左配管18
ポンプユニット:ポンプユニット19
レバー位置検出装置:レバー位置検出装置251
出力配管:右出力配管249、左出力配管250
シリンダ位置検出装置:シリンダ位置検出装置252
入力配管:右入力配管353、左入力配管354
船外機:船外機5
船舶:船舶11
【符号の説明】
【0052】
1 船舶
2 船体
3 船舶推進機
5 船外機
6 操舵装置
12 操舵レバー
15 第1シリンダ
16 第2シリンダ
17 右配管
18 左配管
19 ポンプユニット
22 支点部
23 連結部
24 操舵グリップ
25 第1シリンダチューブ
29 第1ピストンロッド
31 第2シリンダチューブ
35 第2ピストンロッド
206 操舵装置
249 右出力配管
250 左出力配管
251 レバー位置検出装置
252 シリンダ位置検出装置
306 操舵装置
353 右入力配管
354 左入力配管
406 操舵装置
【技術分野】
【0001】
この発明は、船舶推進機を操舵する操舵装置、この操舵装置を備えた船舶推進機、およびこの船舶推進機を備えた船舶に関する。
【背景技術】
【0002】
船舶は、船体を推進させる船舶推進機と、この船舶推進機を操舵する操舵装置とを備えている。特許文献1に記載の操舵装置は、操船者によって操作されるティラーハンドルと、ティラーハンドルの動作を伝達する複数の歯車と、複数の歯車から伝達されたティラーハンドルの動作を伝達するチェーンおよびスプロケットとを備えている。さらに、この操舵装置は、チェーンおよびスプロケットから伝達されたティラーハンドルの動作を油圧に変換するハンドル側油圧シリンダと、ハンドル側油圧シリンダから伝達された油圧によって船外機を左右に回動させる船外機側油圧シリンダとを備えている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−105212号公報
【発明の概要】
【課題を解決するための手段】
【0004】
ティラーハンドルやステアリングホイールなどの操舵部材は、操船者によって操作される。操舵部材を保持する力、すなわち、操舵部材がステアリングホイールである場合には、回転方向への抵抗力が大きいと、操船者は、大きな力で操舵部材を操作しなければならない。これとは反対に、操舵部材を保持する力が小さいと、操舵部材が簡単に動いてしまうので、操船者は操舵部材を操作しづらい。したがって、操舵部材を保持する力には、最適な範囲が存在する。さらに、直観的な操舵感を操船者に与えるために、操舵部材から操船者に加わる操舵反力は、操舵部材の操作速度に応じて増加することが好ましい。すなわち、操船者が操舵部材を素早く操作したときには、操舵部材をゆっくり操作したときよりも大きな操舵反力が、操船者に瞬時に加わることが好ましい。
【0005】
特許文献1に記載の操舵装置では、ティラーハンドルが、複数の歯車、チェーン、およびスプロケットを介して、ハンドル側油圧シリンダに連結されている。ティラーハンドルが操作されると、ハンドル側油圧シリンダで発生した抵抗力(油圧)が、複数の歯車、チェーン、およびスプロケットを介して、ティラーハンドルに伝達される。そして、ティラーハンドルに伝達された抵抗力は、操舵反力として操船者に加わる。しかしながら、歯車などの多数の部材が、ティラーハンドルとハンドル側油圧シリンダとの間に介在しているので、ハンドル側油圧シリンダで抵抗力が発生してから、この抵抗力がティラーハンドルに伝達されるまでに、時間差(タイムラグ)が生じる。そのため、特許文献1に記載の操舵装置では、直観的な操舵感が得られない。
【0006】
そこで、この発明の目的は、操舵感の良好な船舶推進機の操舵装置、船舶推進機、および船舶を提供することである。
前記目的を達成するための本発明の一実施形態は、操船者によって操作される操舵レバーと、前記操舵レバーに連結された第1ピストンロッドを含む第1シリンダと、前記第1ピストンロッドの移動に伴って相対移動される第2シリンダチューブおよび第2ピストンロッドを含み、前記第2シリンダチューブおよび第2ピストンロッドの相対移動に伴って船舶推進機を操舵する第2シリンダとを含む、船舶推進機の操舵装置を提供する。
【0007】
この構成によれば、第1シリンダの第1ピストンロッドが、操舵レバーに連結されているので、操舵レバーが操作されると、第1ピストンロッドが移動する。第2シリンダの第2シリンダチューブおよび第2ピストンロッドは、第1ピストンロッドの移動に伴って相対移動される。船舶推進機は、第2シリンダチューブおよび第2ピストンロッドの相対移動に伴って操舵される。したがって、操船者は、操舵レバーを操作することにより、船舶推進機を操舵できる。さらに、操舵レバーの操作に伴って第1ピストンロッドが移動するので、操舵レバーに摩擦力を与える摩擦部材や、操舵レバーの操作に伴って弾性変形する弾性部材が設けられている場合とは異なり、操舵レバーの操作速度に比例する大きさの操舵反力が、第1シリンダから操舵レバーに直接伝達される。そのため、操舵装置は、直観的な操舵感を瞬時に操船者に与えることができる。これにより、操舵感を高めることができる。
【0008】
前記操舵レバーは、該レバーが船体に対して前記第1ピストンロッドの往復方向に揺動できるように前記船体に連結される支点部を含んでいてもよい。前記支点部は、前記操舵レバーの端部であってもよいし、前記操舵レバーの中間部であってもよい。この構成によれば、操舵レバーは、船体に対して支点部を中心に揺動するように操作される。さらに、操舵レバーの支点部が、第1ピストンロッドの往復方向に揺動できるように船体に連結されているので、操舵レバーが操作されると、第1ピストンロッドが往復方向に移動する。したがって、操舵レバーが操作されると、操舵レバーの操作速度に比例する大きさの操舵反力が、第1シリンダから操舵レバーに直接伝達される。そのため、操舵装置は、直観的な操舵感を操船者に与えることができる。
【0009】
前記第1ピストンロッドは、前記操舵レバーに対して回転可能に連結されていてもよい。
また、前記第1シリンダは、前記船体に対して回転可能に連結される第1シリンダチューブを含んでいてもよい。
また、前記操舵レバーは、前記第1ピストンロッドに連結された連結部を含んでいてもよい。前記連結部は、前記第1ピストンロッドのストロークよりも小さい揺動幅で前記船体に対して揺動可能であってもよい。
【0010】
また、前記操舵レバーは、前記連結部に対して前記支点部とは反対側に配置された操舵グリップを含んでいてもよい。
また、前記操舵グリップから前記連結部までの距離は、前記支点部から前記連結部までの距離より大きくてもよい。
また、前記操舵レバーは、鉛直面または水平面に沿って配置されていてもよい。
【0011】
また、前記操舵装置は、前記第1シリンダと前記第2シリンダとに接続されており、作動流体が流通する配管をさらに含んでいてもよい。この構成によれば、操舵レバーが操作され、第1ピストンロッドが移動すると、第1シリンダ内の作動流体が、配管内に排出される。そして、配管内に排出された作動流体は、第2シリンダ内に供給される。そのため、第2シリンダ内で流体圧が発生し、第2シリンダチューブおよび第2ピストンロッドが相対移動する。これにより、船舶推進機が操舵される。
【0012】
前記操舵装置は、前記配管に取り付けられており、前記第1シリンダから前記第2シリンダに伝達される流体圧を増幅可能なポンプユニットをさらに含んでいてもよい。この構成によれば、操舵レバーが操作されたときに第1シリンダから第2シリンダに伝達される流体圧が、ポンプユニットによって増幅されるので、船舶推進機を操舵するために操船者が操舵レバーに加える操作力を減少させることができる。したがって、船舶推進機が大型で高重量であったとしても、操船者は、比較的小さな力で船舶推進機を操舵できる。
【0013】
前記ポンプユニットは、前記第1シリンダで発生した流体圧に応じて前記第2シリンダに伝達される流体圧を調整可能であってもよい。たとえば、前記ポンプユニットは、前記第1シリンダから前記第2シリンダに伝達される流体圧を一定の割合で増幅させてもよいし、前記第1シリンダで発生した流体圧に応じて、流体圧の増幅率を増加または減少させてもよい。
【0014】
前記操舵装置は、前記操舵レバーの位置を検出するレバー位置検出装置と、前記第2シリンダに接続されており、作動流体が流通する出力配管と、前記出力配管を介して前記第2シリンダに接続されたポンプユニットをさらに含んでいてもよい。前記ポンプユニットは、前記操舵レバーが操作されたときに前記レバー位置検出装置の出力に基づいて前記第2シリンダに作動流体を供給することにより、前記操舵レバーの移動量に対応する移動量で前記第2シリンダチューブおよび第2ピストンロッドを相対移動させてもよい。この構成によれば、ポンプユニットは、レバー位置検出装置の出力に基づいて操舵レバーの移動を検出する。そして、ポンプユニットは、レバー位置検出装置の出力に基づいて出力配管から第2シリンダに作動流体を供給することにより、操舵レバーの移動量に対応する移動量で第2シリンダチューブおよび第2ピストンロッドを相対移動させる。これにより、操舵レバーの移動量に対応する移動量で船舶推進機が操舵される。
【0015】
前記操舵レバーが操作されたとき、前記ポンプユニットは、前記操舵レバーの移動量に対応する予め定められた移動量で前記第2シリンダチューブおよび第2ピストンロッドを相対移動させてもよい。また、前記操舵レバーが操作されたとき、前記第2シリンダチューブおよび第2ピストンロッドの実際の相対位置が、前記ポンプユニットにフィードバックされ、実際の相対位置が目標位置に近づくように、前記第2シリンダチューブおよび第2ピストンロッドが相対移動されてもよい。
【0016】
具体的には、前記操舵装置は、前記レバー位置検出装置、出力配管、およびポンプユニットに加えて、前記第2シリンダチューブおよび第2ピストンロッドの相対位置を検出するシリンダ位置検出装置をさらに含んでいてもよい。この場合、前記ポンプユニットは、前記レバー位置検出装置およびシリンダ位置検出装置からの出力に基づいて、前記第2シリンダチューブおよび第2ピストンロッドを相対移動させることにより、前記船舶推進機の目標位置と前記船舶推進機の現在位置との差を減少させてもよい。この構成によれば、ポンプユニットは、操舵レバーの位置と、第2シリンダチューブおよび第2ピストンロッドの相対位置とに基づいて、第2シリンダチューブおよび第2ピストンロッドを相対移動させる。そして、ポンプユニットは、船舶推進機の目標位置と船舶推進機の現在位置との差を減少させる。すなわち、船舶推進機の現在位置がポンプユニットにフィードバックされ、船舶推進機が確実に目標位置に近づけられる。そのため、船舶の航走方向を精度よく制御できる。
【0017】
また、前記操舵装置は、前記レバー位置検出装置、出力配管、およびポンプユニットに加えて、前記第1シリンダと前記ポンプユニットとに接続されており、作動流体が流通する入力配管をさらに含んでいてもよい。この構成によれば、操舵レバーが操作されると、第1シリンダ内の作動流体が、入力配管内に排出される。そして、入力配管内に排出された作動流体は、ポンプユニットおよび出力配管を介して、第2シリンダ内に供給される。そのため、第2シリンダチューブおよび第2ピストンロッドが相対移動し、船舶推進機が操舵される。したがって、操舵装置は、ポンプユニットに異常が生じたとしても、船舶推進機を操舵できる。
【0018】
前記第1シリンダは、油圧シリンダであってもよいし、エアシリンダであってもよい。同様に、前記第2シリンダは、油圧シリンダであってもよいし、エアシリンダであってもよい。オイルや空気などの作動流体が、第1シリンダと第2シリンダとの間を移動する場合、第1シリンダおよび第2シリンダは、同種のシリンダである。たとえば第1シリンダが油圧シリンダである場合、第2シリンダも油圧シリンダである。一方、作動流体が、第1シリンダと第2シリンダとの間を移動しない場合、第1シリンダおよび第2シリンダは、同種のシリンダであってもよいし、異なる種類のシリンダであってもよい。たとえば第1シリンダが油圧シリンダである場合、第2シリンダは、油圧シリンダであってもよいし、エアシリンダであってもよい。
【0019】
本発明の他の実施形態は、前記操舵装置と、前記操舵装置によって操舵される船外機とを含む、船舶推進機を提供する。この構成によれば、前述の効果と同様な効果を奏することができる。
本発明のさらに他の実施形態は、前記船舶推進機と、前記船外機が取り付けられた船体とを含む、船舶を提供する。この構成によれば、前述の効果と同様な効果を奏することができる。
【図面の簡単な説明】
【0020】
【図1】この発明の第1実施形態に係る船舶の模式的な斜視図である。
【図2】この発明の第1実施形態に係る操舵装置の模式的な回路図である。
【図3】この発明の第2実施形態に係る操舵装置の模式的な回路図である。
【図4】この発明の第3実施形態に係る操舵装置の模式的な回路図である。
【図5】この発明の第4実施形態に係る操舵装置の模式的な回路図である。
【発明を実施するための形態】
【0021】
以下では、この発明の実施形態を、添付図面を参照して詳細に説明する。
以下の説明における「前後方向」「左右方向」および「上下方向」は、船体2を基準とする方向である。
[第1実施形態]
図1は、この発明の第1実施形態に係る船舶1の模式的な斜視図である。
【0022】
船舶1は、日本ではシイラと呼ばれるマヒマヒ(Mahi-mahi 学名 Coryphaena hippurus)などの水面近くを泳ぐ魚を船上から銛で突いて捕獲するときに用いられる小型のボートである。船舶1は、船体2と、船体2を推進させる船舶推進機3とを備えている。船舶推進機3は、プロペラ4を回転させることによって推力を発生する船外機5と、船外機5を操舵する操舵装置6と、船外機5の推力を調整する速度調整装置7とを含む。船外機5は、ブラケット8(図2参照)によって船体2の船尾に取り付けられている。船外機5は、船体2に対して左右に回動可能である。操舵装置6は、船体2に対して船外機5を左右に回動させることにより、船外機5を操舵する。また、速度調整装置7は、プロペラ4の回転速度および回転方向を変更させることにより、船外機5の推力を調整する。
【0023】
船体2は、操船者を収容する操船部9と、操船部9と船尾との間に配置された乗船部10とを含む。操船部9は、操船者の臀部付近を取り囲む筒状の周壁11を含む。操舵装置6は、操船部9に配置された操舵レバー12を含み、速度調整装置7は、操船部9に配置された速度調整レバー13を含む。操舵レバー12および速度調整レバー13は、操船者によって操作される。操舵レバー12および速度調整レバー13は、船体2に取り付けられている。操舵レバー12は、鉛直面に沿って直線状に延びるバー(棒)であり、周壁11の前部に設けられた開口14から上方に突出している。開口14は、左右方向に延びるスロット状である。操舵レバー12は、船体2に対して左右に回動可能である。また、速度調整レバー13は、周壁11の側方に配置されている。速度調整レバー13は、船体2に対して前後に回動可能である。
【0024】
操舵装置6は、操舵レバー12の回動に伴って船外機5を左右に回動させる。たとえば操船者が操舵レバー12を右に倒すと、操舵装置6は、操舵レバー12の位置に対応する旋回角度で船舶1が右に旋回するように船外機5を回動させる。また、速度調整装置7は、速度調整レバー13の回動に伴ってプロペラ4の回転速度および回転方向を変更させる。たとえば操船者が速度調整レバー13を前に倒すと、速度調整装置7は、速度調整レバー13の位置に対応する速度で船舶1が前進するようにプロペラ4を回転させる。したがって、船舶1は、操舵レバー12および速度調整レバー13の操作によって操作される。
【0025】
後述するように、操舵装置6は、所定の保持力で操舵レバー12をその場で保持している。さらに、操舵装置6は、操舵レバー12の操作速度に比例する大きさの操舵反力を操舵レバー12から操船者に与える。すなわち、たとえば操船者が操舵レバー12を素早く操作すると、ゆっくり操作したときよりも大きな操舵反力が、操舵レバー12に加わる。船舶1が魚を追うとき、操船者は、周壁11と操舵レバー12とによって自身の体を支えながら、操舵レバー12を素早く操作する場合がある。このとき操舵レバー12が簡単に移動すると、すなわち、操舵レバー12を保持する力が弱いと、操船者は、自身の姿勢をしっかり保てない場合がある。したがって、操舵レバー12の操作速度に比例する大きさの操舵反力を発生させることにより、操船者の姿勢を確実に安定させることができる。
【0026】
図2は、この発明の第1実施形態に係る操舵装置6の模式的な回路図である。
操舵装置6は、油圧式の操舵装置である。操舵装置6は、前述の操舵レバー12と、操舵レバー12に連結された第1シリンダ15と、船外機5に連結された第2シリンダ16と、第1シリンダ15および第2シリンダ16を連結する複数の配管17、18(右配管17および左配管18)とを含む。さらに、操舵装置6は、第1シリンダ15と第2シリンダ16との間で複数の配管17、18に取り付けられたポンプユニット19と、ポンプユニット19と第2シリンダ16との間で複数の配管17、18に取り付けられたロックバルブ20とを含む。第1シリンダ15および第2シリンダ16は、油圧シリンダである。第1シリンダ15、第2シリンダ16、右配管17、および左配管18の内部は、作動流体の一例であるオイルによって満たされている。
【0027】
操舵レバー12は、取付部材21を介して船体2に連結された支点部22と、支点部22の上方に配置された連結部23と、連結部23の上方に配置された操舵グリップ24とを含む。支点部22は、操舵レバー12の下端部であってもよいし、操舵レバー12の中間部であってもよい。支点部22は、船体2に対して揺動軸線A1まわりに左右に揺動可能である。揺動軸線A1は、支点部22を通る軸線であると共に、第1シリンダ15の第1ピストンロッド29の往復方向に直交する軸線である。したがって、操舵レバー12は、第1ピストンロッド29の往復方向に揺動可能に船体2に連結されている。支点部22は、周壁11に設けられた開口14より下方に配置されている。同様に、連結部23は、開口14より下方に配置されている。第1シリンダ15(具体的には、第1ピストンロッド29の先端部)は、連結部23に連結されている。したがって、第1シリンダ15は、開口14より下方で操舵レバー12に連結されている。操舵グリップ24は、開口14より上方に配置されている。操舵グリップ24は、操船者によって握られる。操舵グリップ24から連結部23までの距離は、支点部22から連結部23までの距離より大きい。
【0028】
操舵レバー12は、操舵レバー12が上下方向に延びる直進位置(図2において実線で示す位置)を中心に揺動軸線A1まわりに左右に揺動可能である。直進位置は、プロペラ4の回転軸線Apが平面視において前後方向に延びるように設定されている。すなわち、操舵レバー12の直進位置は、プロペラ4の回転軸線Apが平面視において前後方向に延びる船外機5の直進位置に対応付けられている。操舵レバー12が直進位置より右側に傾けられると、操舵装置6は、船舶1が右に旋回するように船外機5を回動させる。また、操舵レバー12が直進位置より左側に傾けられると、操舵装置6は、船舶1が左に旋回するように船外機5を回動させる。右最大操舵位置(図2において一点鎖線で示す位置)は、直進位置より右側で操舵レバー12が周壁11に接する位置であり、左最大操舵位置(図2において二点鎖線で示す位置)は、直進位置より左側で操舵レバー12が周壁11に接する位置である。すなわち、操舵レバー12の揺動幅は、周壁11によって規制される。第1シリンダ15は、操舵レバー12の揺動に伴って伸縮する。第1ピストンロッド29の先端部は、操舵レバー12の連結部23と共に揺動軸線A1まわりに揺動する。連結部23の揺動幅Wは、第1ピストンロッド29のストロークSよりも小さい。
【0029】
第1シリンダ15は、片ロッド型の複動シリンダである。第1シリンダ15は、第1シリンダチューブ25と、第1シリンダチューブ25内を第1右空間26と第1左空間27とに仕切る第1ピストン28と、第1ピストン28に連結された第1ピストンロッド29とを含む。右配管17は、第1右空間26に接続されており、左配管18は、第1左空間27に接続されている。第1ピストンロッド29の先端部は、第1シリンダチューブ25の一端部から第1シリンダ15の軸方向に突出している。第1ピストンロッド29の先端部は、操舵レバー12の連結部23に連結されている。第1ピストンロッド29の先端部は、連結部23に対して、第1ピストンロッド29の往復方向(第1シリンダ15の軸方向)に直交する回転軸線A2まわりに回転可能である。したがって、第1ピストンロッド29は、回転軸線A2まわりに回転可能に操舵レバー12に連結されている。また、第1シリンダチューブ25の他端部は、取付部材30を介して船体2に連結されている。第1シリンダチューブ25の他端部は、船体2に対して、回転軸線A2と平行な回転軸線A3まわりに回転可能である。したがって、第1シリンダチューブ25は、回転軸線A3まわりに回転可能に船体2に連結されている。回転軸線A2は、第1ピストンロッド29の先端部を通る軸線であり、回転軸線A3は、第1シリンダチューブ25の他端部を通る軸線である。
【0030】
第2シリンダ16は、両ロッド型の複動シリンダである。第2シリンダ16は、第2シリンダチューブ31と、第2シリンダチューブ31内を第2右空間32と第2左空間33とに仕切る第2ピストン34と、第2ピストン34に連結された第2ピストンロッド35とを含む。第2右空間32は、左配管18によって、第1シリンダ15の第1左空間27に接続されており、第2左空間33は、右配管17によって、第1シリンダ15の第1右空間26に接続されている。第2シリンダチューブ31および第2ピストンロッド35は、左右方向に延びている。第2ピストンロッド35の一端部および他端部は、それぞれ、第2シリンダチューブ31の一端部および他端部から軸方向外方に突出している。第2ピストンロッド35の一端部および他端部は、それぞれ、2つの固定アーム36に連結されている。2つの固定アーム36は、船外機5を船体2に取り付けるブラケット8等を介して船体2に固定されている。したがって、第2ピストンロッド35は、船体2に固定されている。また、第2シリンダチューブ31は、船外機5のステアリングアーム37に連結されている。第2シリンダチューブ31は、船体2に対して左右方向に移動可能である。ステアリングアーム37は、第2シリンダチューブ31と共に左右方向に移動する。船外機5は、左右方向へのステアリングアーム37の移動に伴って、船体2の後方で上下に延びるステアリング軸線Asまわりに左右に回動する。
【0031】
ポンプユニット19は、右配管17および左配管18の一方に取り付けられた油圧ポンプ38と、油圧ポンプ38を駆動する電動モータ39とを含む。さらに、ポンプユニット19は、駆動回路40を介して電動モータ39を制御する制御装置41と、右配管17および左配管18内の圧力を検出する2つの圧力センサー42、43(右圧力センサー42および左圧力センサー43)とを含む。油圧ポンプ38は、たとえば、第1シリンダ15側および第2シリンダ16側の両方向にオイルを吐出可能である。制御装置41は、電動モータ39に油圧ポンプ38を駆動させることにより、第1シリンダ15から第2シリンダ16に伝達される油圧を調整可能である。したがって、制御装置41は、第1シリンダ15から第2シリンダ16に伝達される油圧を増幅可能である。制御装置41は、2つの圧力センサー42、43の出力に基づいて電動モータ39を制御する。右圧力センサー42は、第1シリンダ15と油圧ポンプ38との間で右配管17に接続されており、左圧力センサー43は、第1シリンダ15と油圧ポンプ38との間で左配管18に接続されている。制御装置41は、たとえば右配管17内の圧力と左配管18内の圧力との差が減少するように、電動モータ39を制御する。すなわち、制御装置41は、第1シリンダ15から操舵レバー12に伝達される操舵反力を軽減させる。
【0032】
ロックバルブ20は、オイルの流通方向を制御するパイロットチェックバルブである。ロックバルブ20は、右配管17に取り付けられた右チェックバルブ44と、左配管18に取り付けられた左チェックバルブ45とを含む。右チェックバルブ44および左チェックバルブ45は、第1シリンダ15側から第2シリンダ16側にオイルを流通させ、第2シリンダ16側から第1シリンダ15側へのオイルの流れをせき止める。したがって、オイルの逆流は、ロックバルブ20によって防止される。右チェックバルブ44は、パイロット流路46を介して左配管18に接続されており、左チェックバルブ45は、パイロット流路47を介して右配管17に接続されている。左配管18内の圧力がパイロット圧に達すると、右チェックバルブ44が開き、右配管17内の圧力がパイロット圧に達すると、左チェックバルブ45が開く。たとえば、パイロット圧よりも高圧のオイルが、第1シリンダ15側から右チェックバルブ44に供給されると、右チェックバルブ44が開いて、第1シリンダ15側から供給されたオイルが右チェックバルブ44を通過する。それと共に、左チェックバルブ45が開いて、第2シリンダ16側から供給されたオイルが左チェックバルブ45を通過する。
【0033】
操舵レバー12が操作されると、第1シリンダチューブ25の他端部および第1ピストンロッド29の先端部がそれぞれ船体2および操舵レバー12に対して回転しながら、第1シリンダチューブ25および第1ピストンロッド29が軸方向に相対移動する。すなわち、操舵レバー12が操作されると、船体2に対する第1シリンダ15の姿勢が変化しながら、第1シリンダ15が伸縮する。操舵レバー12が右に操作されると、第1ピストン28および第1ピストンロッド29が、第1シリンダチューブ25に対して右に移動し、第1右空間26で油圧が発生する。そのため、第1右空間26内のオイルが、右配管17に排出される。このとき、制御装置41は、左配管18を介して油圧ポンプ38から第1左空間27にオイルを送ることにより、右配管17に排出されるオイルの圧力を増幅させる。そのため、油圧ポンプ38によって増幅された油圧が、右配管17を介して第1右空間26から第2左空間33に伝達される。これにより、第2シリンダチューブ31が船体2に対して左に移動する。そのため、第2右空間32で油圧が発生し、第2右空間32内のオイルが左配管18に排出される。そして、左配管18に排出されたオイルは、ロックバルブ20および油圧ポンプ38を介して第1左空間27に供給される。
【0034】
このように、操舵レバー12が右に操作されると、第2シリンダチューブ31が船体2に対して左に移動し、第2シリンダチューブ31および第2ピストンロッド35が軸方向に相対移動する。これにより、船外機5がステアリング軸線Asまわりに右に回動する。操舵レバー12が左に操作されたときも同様に、第1ピストンロッド29の移動に伴って第2シリンダチューブ31および第2ピストンロッド35が軸方向に相対移動し、船外機5がステアリング軸線Asまわりに左に回動する。このようにして、船外機5が左右に操舵される。さらに、第1シリンダ15から第2シリンダ16に伝達される油圧が、ポンプユニット19によって増幅されるので、船外機5が大型で高重量であったとしても、操船者は、比較的小さい操作力で船外機5を回動させることができる。しかも、オイルの逆流がロックバルブ20によって防止されるので、操舵レバー12の直進位置と船外機5の直進位置との位置関係が変化することを防止できる。
【0035】
以上のように第1実施形態では、第1シリンダ15の第1ピストンロッド29が、操舵レバー12に連結されているので、操舵レバー12が操作されると、第1シリンダチューブ25に対して第1ピストンロッド29が移動し、第1右空間26または第1左空間27内のオイルが、右配管17または左配管18に排出される。右配管17および左配管18の内径が、第1シリンダチューブ25の内径より小さいから、操舵レバー12が操作されると、操舵レバー12の操作速度に比例する大きさの操舵反力が、第1シリンダ15から操舵レバー12に直接加わる。これにより、操舵レバー12の操作速度に比例する大きさの操舵反力が、操船者に直接加わる。そのため、操舵装置6は、直観的な操舵感を瞬時に操船者に与えることができる。これにより、操舵感を高めることができる。
【0036】
[第2実施形態]
次に、本発明の第2実施形態について説明する。
第2実施形態と前述の第1実施形態との主要な相違点は、第1シリンダ15と第2シリンダ16との機械的な連結が解除されており、ポンプユニット19が、操舵レバー12の移動を検出して、第2シリンダチューブ31および第2ピストンロッド35を相対移動させることである。
【0037】
図3は、この発明の第2実施形態に係る操舵装置206の模式的な回路図である。この図3において、前述の図1〜図2に示された各部と同等の構成部分については、図1等と同一の参照符号を付してその説明を省略する。
第2実施形態に係る操舵装置206は、右配管17および左配管18を除き、第1実施形態に係る操舵装置6と同様の構成を備えている。すなわち、操舵装置206は、右配管17および左配管18に代えて、第1シリンダ15の第1右空間26と第1左空間27とを接続する接続配管248と、第2シリンダ16とポンプユニット19とを接続する複数の出力配管249、250(右出力配管249および左出力配管250)とを含む。さらに、操舵装置206は、操舵レバー12の位置を検出するレバー位置検出装置251と、第2シリンダチューブ31および第2ピストンロッド35の相対位置を検出するシリンダ位置検出装置252とをさらに含む。レバー位置検出装置251は、ポテンショメータであってもよいし、その他の形式の位置検出装置であってもよい。シリンダ位置検出装置252についても同様である。
【0038】
制御装置41は、レバー位置検出装置251およびシリンダ位置検出装置252の出力に基づいてポンプユニット19を制御する。レバー位置検出装置251は、操舵レバー12の位置を検出してもよいし、操舵レバー12と共に移動する部材の位置を検出することにより、操舵レバー12の位置を検出してもよい。たとえば、レバー位置検出装置251が、第1シリンダチューブ25および第1ピストンロッド29に取り付けられており、第1ピストンロッド29および第1シリンダチューブ25の相対位置に基づいて操舵レバー12の位置が検出されてもよい。同様に、シリンダ位置検出装置252は、第2シリンダチューブ31および第2ピストンロッド35の相対位置を検出してもよいし、第2シリンダチューブ31と共に移動する部材の位置を検出することにより、第2シリンダチューブ31および第2ピストンロッド35の相対位置を検出してもよい。船外機5は、第2シリンダチューブ31および第2ピストンロッド35の相対移動に伴って回動するから、制御装置41は、第2シリンダチューブ31および第2ピストンロッド35の相対位置を検出することにより、船外機5の位置を検出できる。
【0039】
制御装置41は、レバー位置検出装置251の出力に基づいて操舵レバー12の移動を検出する。操舵レバー12が操作されると、制御装置41は、レバー位置検出装置251の出力に基づいて電動モータ39を制御することにより、第2シリンダ16の第2右空間32または第2左空間33にオイルを供給させる。これにより、制御装置41は、操舵レバー12の移動量に対応する移動量で第2ピストンロッド35および第2シリンダチューブ31を相対移動させる。さらに、このとき、制御装置41は、シリンダ位置検出装置252からの出力に基づいて、第2シリンダチューブ31および第2ピストンロッド35の相対移動量を検出する。そして、制御装置41は、第2シリンダチューブ31および第2ピストンロッド35を相対移動させることにより、船外機5の目標位置と船外機5の現在位置との差を減少させて、船外機5の現在位置を船外機5の目標位置に一致させる。これにより、船舶1の航走方向が精度よく制御される。
【0040】
[第3実施形態]
次に、本発明の第3実施形態について説明する。
第3実施形態と前述の第2実施形態との主要な相違点は、第1シリンダ15と第2シリンダ16とが機械的に連結されており、非常操舵時(たとえば、油圧ポンプ38や電動モータ39の故障時)には、操舵装置306が、手動式の操舵装置として用いられることである。
【0041】
図4は、この発明の第3実施形態に係る操舵装置306の模式的な回路図である。この図4において、前述の図1〜図3に示された各部と同等の構成部分については、図1等と同一の参照符号を付してその説明を省略する。
第3実施形態に係る操舵装置306は、第2実施形態に係る操舵装置206と同様の構成を備えている。すなわち、操舵装置306は、第2実施形態に係る操舵装置206の構成に加えて、第1シリンダ15とポンプユニット19とを接続する複数の入力配管353、354(右入力配管353および左入力配管354)と、右入力配管353および左入力配管354を接続する2つのバイパス配管355とを含む。さらに、操舵装置306は、右入力配管353に取り付けられた右バルブ356と、左入力配管354に取り付けられた左バルブ357と、バイパス配管355に取り付けられたバイパスバルブ358とを含む。
【0042】
右バルブ356および左バルブ357は、常時閉のバルブであり、バイパスバルブ358は、常時開のバルブである。したがって、第1シリンダ15の第1右空間26および第1左空間27は、常時、接続状態にあり、第2シリンダ16に対して、常時、非接続状態にある。一方のバイパス配管355は、右バルブ356および左バルブ357より第1シリンダ15側で右入力配管353および左入力配管354に接続されている。他方のバイパス配管355は、右バルブ356および左バルブ357より第2シリンダ16側で右入力配管353および左入力配管354に接続されている。右バルブ356、左バルブ357、およびバイパスバルブ358は、手動弁であってもよいし、電磁弁であってもよい。
【0043】
通常操舵時には、右バルブ356および左バルブ357が閉じられており、バイパスバルブ358が開かれている。通常操舵時には、第2実施形態と同様に、制御装置41が、レバー位置検出装置251およびシリンダ位置検出装置252の出力に基づいて電動モータ39を制御することにより、船外機5を操舵レバー12に追従させる。一方、非常操舵時には、右バルブ356および左バルブ357が開かれ、バイパスバルブ358が閉じられる。すなわち、非常操舵時には、操舵装置306は、オイルが第1シリンダ15と第2シリンダ16との間を移動できる状態に切り替えられ、手動式の操舵装置として用いられる。
【0044】
[第4実施形態]
次に、本発明の第4実施形態について説明する。
第4実施形態と前述の第1実施形態との主要な相違点は、操舵レバー12に加えて、操船者によって操作されるステアリングホイール459が設けられていることである。
図5は、この発明の第4実施形態に係る操舵装置406の模式的な回路図である。この図5において、前述の図1〜図4に示された各部と同等の構成部分については、図1等と同一の参照符号を付してその説明を省略する。
【0045】
第4実施形態に係る操舵装置406は、第1実施形態に係る操舵装置6と同様の構成を備えている。すなわち、操舵装置406は、第1実施形態に係る操舵装置6の構成に加えて、操船者によって操作されるステアリングホイール459と、ステアリングホイール459の操作に伴ってオイルを吐出するヘルムポンプ460(helm pump)とを含む。さらに、操舵装置406は、ヘルムポンプ460と右配管17とを接続する右補助配管461と、ヘルムポンプ460と左配管18とを接続する左補助配管462とを含む。
【0046】
ステアリングホイール459は、ヘルムポンプ460に連結されている。ヘルムポンプ460は、ステアリングホイール459によって駆動される。ステアリングホイール459が、右まわりに操作されると、ヘルムポンプ460は、右補助配管461にオイルを吐出する。右補助配管461に吐出されたオイルは、右配管17を介して第2シリンダ16に供給される。それと共に、第2シリンダ16から排出されたオイルは、左補助配管462を介してヘルムポンプ460に供給される。これにより、船外機5がステアリング軸線Asまわりに右に回動する。ステアリングホイール459が左まわりに操作されたときも同様に、ヘルムポンプ460が、左補助配管462にオイルを吐出し、左補助配管462に供給されたオイルが、左配管18を介して第2シリンダ16に供給される。それと共に、第2シリンダ16から排出されたオイルは、右補助配管461を介してヘルムポンプ460に供給される。これにより、船外機5がステアリング軸線Asまわりに左に回動する。このように、船外機5は、操舵レバー12だけでなく、ステアリングホイール459によっても操作される。
【0047】
[他の実施形態]
この発明の実施形態の説明は以上であるが、この発明は、前述の第1〜第4実施形態の内容に限定されるものではなく、請求項記載の範囲内において種々の変更が可能である。
たとえば、前述の第1実施形態では、第1シリンダ15から第2シリンダ16に伝達される油圧を増幅するポンプユニット19が操舵装置6に設けられている場合について説明した。しかし、ポンプユニット19が設けられておらず、第1シリンダ15で発生した油圧によって第2シリンダ16が駆動されてもよい。すなわち、第1実施形態に係る操舵装置6は、ポンプユニット19が設けられていない手動式の操舵装置であってもよい。
【0048】
また、前述の第1〜第4実施形態では、操舵レバー12が鉛直な姿勢で船体2に保持されている場合について説明した。しかし、操舵レバー12は、水平な姿勢で船体2に保持されていてもよい。
また、前述の第1〜第4実施形態では、第1シリンダ15および第2シリンダ16が、油圧シリンダである場合について説明した。しかし、第1シリンダ15および第2シリンダ16は、エアシリンダであってもよい。
【0049】
また、前述の第1〜第4実施形態では、第2シリンダ16が、両ロッド型の複動シリンダである場合について説明した。しかし、第2シリンダ16は、片ロッド型の複動シリンダであってもよい。具体的には、第2シリンダ16は、船体2に固定されたシリンダチューブと、船外機5のステアリングアーム37に固定されたピストンロッドとを含む片ロッド型の複動シリンダであってもよい。
【0050】
また、前述の第1〜第4実施形態では、操舵装置が、1機の船外機5を操舵する場合について説明した。しかし、複数機の船外機5が、共通の操舵装置によって操舵されてもよい。
また、前述の第1〜第4実施形態では、ポンプユニット19が、油圧ポンプ38と、電動モータ39と、制御装置41とを含む場合について説明した。しかし、ポンプユニット19の構成はこれに限られない。具体的には、前述の第1〜第4実施形態では、油圧ポンプ38が、右配管17および左配管18の一方に取り付けられている場合について説明した。しかし、油圧ポンプ38は、方向制御弁を介して右配管17および左配管18の両方に接続されていてもよい。また、右配管17および左配管18にそれぞれ対応する2つの油圧ポンプ38が設けられていてもよい。
【0051】
その他、特許請求の範囲に記載された事項の範囲で種々の設計変更を施すことが可能である。
以下に、特許請求の範囲に記載された構成要素と前述の実施形態における構成要素との対応関係を示す。
操舵レバー:操舵レバー12
第1ピストンロッド:第1ピストンロッド29
第1シリンダ:第1シリンダ15
第2ピストンロッド:第2ピストンロッド35
第2シリンダチューブ:第2シリンダチューブ31
船舶推進機:船舶推進機3
第2シリンダ:第2シリンダ16
操舵装置:操舵装置6、206、306、406
船体:船体2
支点部:支点部22
第1シリンダチューブ:第1シリンダチューブ25
連結部:連結部23
操舵グリップ:操舵グリップ24
配管:右配管17、左配管18
ポンプユニット:ポンプユニット19
レバー位置検出装置:レバー位置検出装置251
出力配管:右出力配管249、左出力配管250
シリンダ位置検出装置:シリンダ位置検出装置252
入力配管:右入力配管353、左入力配管354
船外機:船外機5
船舶:船舶11
【符号の説明】
【0052】
1 船舶
2 船体
3 船舶推進機
5 船外機
6 操舵装置
12 操舵レバー
15 第1シリンダ
16 第2シリンダ
17 右配管
18 左配管
19 ポンプユニット
22 支点部
23 連結部
24 操舵グリップ
25 第1シリンダチューブ
29 第1ピストンロッド
31 第2シリンダチューブ
35 第2ピストンロッド
206 操舵装置
249 右出力配管
250 左出力配管
251 レバー位置検出装置
252 シリンダ位置検出装置
306 操舵装置
353 右入力配管
354 左入力配管
406 操舵装置
【特許請求の範囲】
【請求項1】
操船者によって操作される操舵レバーと、
前記操舵レバーに連結された第1ピストンロッドを含む第1シリンダと、
前記第1ピストンロッドの移動に伴って相対移動される第2シリンダチューブおよび第2ピストンロッドを含み、前記第2シリンダチューブおよび第2ピストンロッドの相対移動に伴って船舶推進機を操舵する第2シリンダとを含む、船舶推進機の操舵装置。
【請求項2】
前記操舵レバーは、該レバーが船体に対して前記第1ピストンロッドの往復方向に揺動できるように前記船体に連結される支点部を含む、請求項1に記載の船舶推進機の操舵装置。
【請求項3】
前記第1ピストンロッドは、前記操舵レバーに対して回転可能に連結されている、請求項2に記載の船舶推進機の操舵装置。
【請求項4】
前記第1シリンダは、前記船体に対して回転可能に連結される第1シリンダチューブを含む、請求項2または3に記載の船舶推進機の操舵装置。
【請求項5】
前記操舵レバーは、前記第1ピストンロッドに連結されており、前記第1ピストンロッドのストロークよりも小さい揺動幅で前記船体に対して揺動可能な連結部を含む、請求項2〜4のいずれか一項に記載の船舶推進機の操舵装置。
【請求項6】
前記操舵レバーは、前記連結部に対して前記支点部とは反対側に配置された操舵グリップを含む、請求項5に記載の船舶推進機の操舵装置。
【請求項7】
前記操舵グリップから前記連結部までの距離は、前記支点部から前記連結部までの距離より大きい、請求項6に記載の船舶推進機の操舵装置。
【請求項8】
前記操舵レバーは、鉛直面または水平面に沿って配置されている、請求項1〜7のいずれか一項に記載の船舶推進機の操舵装置。
【請求項9】
前記第1シリンダと前記第2シリンダとに接続されており、作動流体が流通する配管をさらに含む、請求項1〜8のいずれか一項に記載の船舶推進機の操舵装置。
【請求項10】
前記配管に取り付けられており、前記第1シリンダから前記第2シリンダに伝達される流体圧を増幅可能なポンプユニットをさらに含む、請求項9に記載の船舶推進機の操舵装置。
【請求項11】
前記ポンプユニットは、前記第1シリンダで発生した流体圧に応じて前記第2シリンダに伝達される流体圧を調整可能である、請求項10に記載の船舶推進機の操舵装置。
【請求項12】
前記操舵レバーの位置を検出するレバー位置検出装置と、
前記第2シリンダに接続されており、作動流体が流通する出力配管と、
前記出力配管を介して前記第2シリンダに接続されており、前記操舵レバーが操作されたときに前記レバー位置検出装置の出力に基づいて前記第2シリンダに作動流体を供給することにより、前記操舵レバーの移動量に対応する移動量で前記第2シリンダチューブおよび第2ピストンロッドを相対移動させるポンプユニットをさらに含む、請求項1〜8のいずれか一項に記載の船舶推進機の操舵装置。
【請求項13】
前記第2シリンダチューブおよび第2ピストンロッドの相対位置を検出するシリンダ位置検出装置をさらに含み、
前記ポンプユニットは、前記レバー位置検出装置およびシリンダ位置検出装置からの出力に基づいて、前記第2シリンダチューブおよび第2ピストンロッドを相対移動させることにより、前記船舶推進機の目標位置と前記船舶推進機の現在位置との差を減少させる、請求項12に記載の船舶推進機の操舵装置。
【請求項14】
前記第1シリンダと前記ポンプユニットとに接続されており、作動流体が流通する入力配管をさらに含む、請求項12または13に記載の船舶推進機の操舵装置。
【請求項15】
前記第1シリンダおよび第2シリンダは、油圧シリンダである、請求項1〜14のいずれか一項に記載の船舶推進機の操舵装置。
【請求項16】
請求項1〜請求項15のいずれか一項に記載の操舵装置と、
前記操舵装置によって操舵される船外機とを含む、船舶推進機。
【請求項17】
請求項16に記載の船舶推進機と、
前記船外機が取り付けられた船体とを含む、船舶。
【請求項1】
操船者によって操作される操舵レバーと、
前記操舵レバーに連結された第1ピストンロッドを含む第1シリンダと、
前記第1ピストンロッドの移動に伴って相対移動される第2シリンダチューブおよび第2ピストンロッドを含み、前記第2シリンダチューブおよび第2ピストンロッドの相対移動に伴って船舶推進機を操舵する第2シリンダとを含む、船舶推進機の操舵装置。
【請求項2】
前記操舵レバーは、該レバーが船体に対して前記第1ピストンロッドの往復方向に揺動できるように前記船体に連結される支点部を含む、請求項1に記載の船舶推進機の操舵装置。
【請求項3】
前記第1ピストンロッドは、前記操舵レバーに対して回転可能に連結されている、請求項2に記載の船舶推進機の操舵装置。
【請求項4】
前記第1シリンダは、前記船体に対して回転可能に連結される第1シリンダチューブを含む、請求項2または3に記載の船舶推進機の操舵装置。
【請求項5】
前記操舵レバーは、前記第1ピストンロッドに連結されており、前記第1ピストンロッドのストロークよりも小さい揺動幅で前記船体に対して揺動可能な連結部を含む、請求項2〜4のいずれか一項に記載の船舶推進機の操舵装置。
【請求項6】
前記操舵レバーは、前記連結部に対して前記支点部とは反対側に配置された操舵グリップを含む、請求項5に記載の船舶推進機の操舵装置。
【請求項7】
前記操舵グリップから前記連結部までの距離は、前記支点部から前記連結部までの距離より大きい、請求項6に記載の船舶推進機の操舵装置。
【請求項8】
前記操舵レバーは、鉛直面または水平面に沿って配置されている、請求項1〜7のいずれか一項に記載の船舶推進機の操舵装置。
【請求項9】
前記第1シリンダと前記第2シリンダとに接続されており、作動流体が流通する配管をさらに含む、請求項1〜8のいずれか一項に記載の船舶推進機の操舵装置。
【請求項10】
前記配管に取り付けられており、前記第1シリンダから前記第2シリンダに伝達される流体圧を増幅可能なポンプユニットをさらに含む、請求項9に記載の船舶推進機の操舵装置。
【請求項11】
前記ポンプユニットは、前記第1シリンダで発生した流体圧に応じて前記第2シリンダに伝達される流体圧を調整可能である、請求項10に記載の船舶推進機の操舵装置。
【請求項12】
前記操舵レバーの位置を検出するレバー位置検出装置と、
前記第2シリンダに接続されており、作動流体が流通する出力配管と、
前記出力配管を介して前記第2シリンダに接続されており、前記操舵レバーが操作されたときに前記レバー位置検出装置の出力に基づいて前記第2シリンダに作動流体を供給することにより、前記操舵レバーの移動量に対応する移動量で前記第2シリンダチューブおよび第2ピストンロッドを相対移動させるポンプユニットをさらに含む、請求項1〜8のいずれか一項に記載の船舶推進機の操舵装置。
【請求項13】
前記第2シリンダチューブおよび第2ピストンロッドの相対位置を検出するシリンダ位置検出装置をさらに含み、
前記ポンプユニットは、前記レバー位置検出装置およびシリンダ位置検出装置からの出力に基づいて、前記第2シリンダチューブおよび第2ピストンロッドを相対移動させることにより、前記船舶推進機の目標位置と前記船舶推進機の現在位置との差を減少させる、請求項12に記載の船舶推進機の操舵装置。
【請求項14】
前記第1シリンダと前記ポンプユニットとに接続されており、作動流体が流通する入力配管をさらに含む、請求項12または13に記載の船舶推進機の操舵装置。
【請求項15】
前記第1シリンダおよび第2シリンダは、油圧シリンダである、請求項1〜14のいずれか一項に記載の船舶推進機の操舵装置。
【請求項16】
請求項1〜請求項15のいずれか一項に記載の操舵装置と、
前記操舵装置によって操舵される船外機とを含む、船舶推進機。
【請求項17】
請求項16に記載の船舶推進機と、
前記船外機が取り付けられた船体とを含む、船舶。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−82301(P2013−82301A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2011−223010(P2011−223010)
【出願日】平成23年10月7日(2011.10.7)
【出願人】(000010076)ヤマハ発動機株式会社 (3,045)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願日】平成23年10月7日(2011.10.7)
【出願人】(000010076)ヤマハ発動機株式会社 (3,045)
[ Back to top ]