
船舶搭載用航行支援システム
【課題】他船舶を検出する2つの装置の検出結果を、1つの表示装置に見易く表示することを目的とする。
【解決手段】船舶搭載用航行支援システム10は、他船舶から送信された情報に基づいて他船舶の情報を取得する船舶自動識別装置18と、物標の検出を行うレーダ装置12とを備える。相関判定部は、船舶自動識別装置18が検出した他船舶と、レーダ装置12が検出した物標とが同一物体であるか否かの相関判定を行う。表示制御部は、設定されたモードに応じて、相関条件を満足する他船舶および物標のいずれか一方を表示装置34に表示する。判定判定部26は、船舶自動識別装置18が検出した他船舶の大きさとレーダ装置12が検出した物標の大きさとの比較に基づく判定を行う。
【解決手段】船舶搭載用航行支援システム10は、他船舶から送信された情報に基づいて他船舶の情報を取得する船舶自動識別装置18と、物標の検出を行うレーダ装置12とを備える。相関判定部は、船舶自動識別装置18が検出した他船舶と、レーダ装置12が検出した物標とが同一物体であるか否かの相関判定を行う。表示制御部は、設定されたモードに応じて、相関条件を満足する他船舶および物標のいずれか一方を表示装置34に表示する。判定判定部26は、船舶自動識別装置18が検出した他船舶の大きさとレーダ装置12が検出した物標の大きさとの比較に基づく判定を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、他船舶情報を取得する船舶識別装置と、船舶レーダ装置とを備える船舶搭載用航行支援システムに関する。
【背景技術】
【0002】
船舶にはレーダ装置の他、船舶自動識別装置(AIS:Automatic Identification System)が搭載されることが多い。レーダ装置は、物標検出用の電磁波を送信する。そして、物標で反射した電磁波を受信することにより、水面に対応する平面上に物標の像を表す物標イメージ情報を生成し表示する。船舶自動識別装置は、搭載船舶名称、搭載船舶の大きさ、位置、速さ、移動方位等を含む情報を報知送信すると共に他船舶から報知送信された情報を受信し、他船舶に関する情報を表示する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−182539号公報
【特許文献2】特開2003−288698号公報
【特許文献3】特開2003−48595号公報
【特許文献4】特開2002−372583号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
レーダ装置では、検出すべき他船舶と自船舶との間に電磁波を遮る物がある場合には、送信した電磁波が遮蔽物によって遮られ、他船舶を検出できないことがある。また、船舶自動識別装置では、船舶自動識別装置が他船舶に搭載されていない場合や、他船舶に搭載された船舶自動識別装置がオフ状態とされている場合には、他船舶を検出することができない。そこで、他船舶を漏れなく表示するため、これらの装置を組み合わせ、各検出結果を同一の表示装置に重ねて表示することが考えられる。しかし、各装置の検出結果を重ねて表示すると、同一の他船舶が重複して表示されることとなり、表示が見難くなる。
【0005】
本発明はこのような課題に対してなされたものである。他船舶を検出する2つの装置の検出結果を、1つの表示装置に見易く表示することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、他船舶から送信された情報に基づいて他船舶情報を取得する船舶識別装置と、物標の検出を行う船舶レーダ装置と、を備える船舶搭載用航行支援システムにおいて、前記船舶識別装置および前記船舶レーダ装置に共有される表示装置と、前記他船舶情報が示す他船舶と、前記船舶レーダ装置が検出した物標と、が同一物体であるか否かを判定する判定部と、前記判定部が同一物体である旨の判定をしたときに、当該判定対象となった他船舶または物標のいずれか一方を前記表示装置に表示させる表示制御部と、を備え、前記判定部は、他船舶の大きさと物標の大きさとの比較に基づく判定を行うことを特徴とする。
【0007】
また、本発明は、他船舶から送信された情報に基づいて他船舶情報を取得する船舶識別装置と、物標の検出を行う船舶レーダ装置と、を備える船舶搭載用航行支援システムにおいて、前記船舶識別装置および前記船舶レーダ装置に共有される表示装置と、前記他船舶情報が示す他船舶と、前記船舶レーダ装置が検出した物標と、が同一物体であるか否かを判定する判定部と、前記判定部が同一物体である旨の判定をしたときに、当該判定対象となった他船舶若しくは物標のいずれか一方を前記表示装置に表示させる第1表示モード、または、当該判定対象となった他船舶および物標の両方を前記表示装置に表示させる第2表示モードのいずれかの表示モードで表示する表示制御部と、を備え、前記判定部は、他船舶の大きさと物標の大きさとの比較に基づく判定を行うことを特徴とする
【0008】
また、本発明に係る船舶搭載用航行支援システムにおいては、前記判定部は、他船舶の位置と物標の位置との比較、他船舶の移動方位と物標の移動方位との比較、および他船舶の速さと物標の速さとの比較のうち、少なくともいずれかに基づく判定を行うことが好適である。
【0009】
また、本発明に係る船舶搭載用航行支援システムにおいては、前記判定部は、船舶の位置情報および物標の位置情報が同一時刻における情報を示すよう、離散的に検出された前記船舶レーダ装置の検出情報を時間補間し、または、離散的に取得された前記他船舶情報を時間補間する補間手段、を備えることが好適である。
【発明の効果】
【0010】
本発明によれば、他船舶を検出する2つの装置の検出結果を1つの表示装置に見易く表示することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の実施形態に係る船舶搭載用航行支援システムの構成を示す図である。
【図2A】相関判定処理のフローチャートである。
【図2B】相関判定処理のフローチャートである。
【図3】物標イメージ情報をピクセル配列を以て示した図である。
【図4】選択AIS他船舶の大きさ分類と、検出物標の大きさ分類とが一致するか否かを判定するためのテーブルを示す図である。
【図5】表示装置における表示例を示す図である。
【発明を実施するための形態】
【0012】
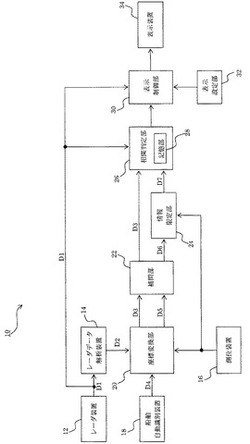
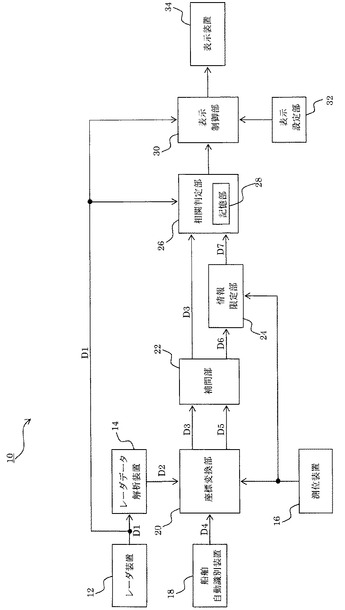
図1に本発明の実施形態に係る船舶搭載用航行支援システム10の構成を示す。船舶搭載用航行支援システム10は、レーダ装置12および船舶自動識別装置18を備え、これらの検出結果に基づいて他船舶の位置を示す画像を生成し、表示装置34に表示する。
【0013】
レーダ装置12は、物標検出用の電磁波を送信し、物標で反射した電磁波を受信する。レーダ装置12が受信する電磁波の波形は、送受信方向に垂直な方向からみた物標の像を示す。レーダ装置12は、電磁波の送受信方位を変化させつつ、送受信方位に対応する受信電磁波の波形を合成することにより、水面に対応する平面上に物標の像を表す物標イメージ情報D1を生成する。レーダ装置12は、レーダアンテナが1回転する毎に1画像分の物標イメージ情報D1を生成し、物標イメージ情報D1をレーダデータ解析装置14、相関判定部26、および表示制御部30に出力する。
【0014】
レーダデータ解析装置14は、物標イメージ情報D1に基づいて各物標の位置を求める。そして、物標イメージ情報D1の時間変化に基づいて各物標の速さおよび移動方位を求め、物標の位置情報に速さおよび移動方位を対応付けたレーダ情報要素を各物標について求める。レーダデータ解析装置14は、各物標に対応するレーダ情報要素を含むレーダ解析情報D2を生成し座標変換部20に出力する。なお、このようなレーダデータ解析装置14として、自動衝突予防援助装置(ARPA:Automatic Radar Plotting Aids)を用いることができる。
【0015】
測位装置16は、GPS受信機、ジャイロ測位装置等を備え、地球に固定された絶対座標の原点を基準とした搭載船舶の位置を測定する。測位装置16は、測定によって得られた位置情報を、座標変換部20および情報限定部24に出力する。
【0016】
船舶自動識別装置18は、測位装置16から位置情報を取得する。また、搭載船舶に搭載された速度計測器、針路計測器等から、搭載船舶の速さおよび移動方位を取得する。そして、搭載船舶名称、搭載船舶の長さ、幅、位置、速さ、移動方位等を含む搭載船舶情報を生成し報知送信する。
【0017】
船舶自動識別装置18は、同様の装置を備える他船舶から報知送信された情報を受信する。そして、受信した情報に基づいて、他船舶の長さ、幅、位置、速さ、移動方位等を対応付けたAIS情報要素を、他船舶のそれぞれについて求める。船舶自動識別装置18は、各他船舶に対応するAIS情報要素を含むAIS他船舶情報D4を生成し、座標変換部20に出力する。
【0018】
座標変換部20は、測位装置16から出力された搭載船舶の位置情報に基づいて、レーダ解析情報D2に含まれる各レーダ情報要素が示す他船舶の位置、速さ、移動方位等の情報を、搭載船舶の位置を座標系原点とした情報に変換する。そして、座標変換後のレーダ解析情報をレーダ解析情報D3として補間部22に出力する。また、座標変換部20は、測位装置16から出力された搭載船舶の位置情報に基づいて、AIS他船舶情報D4に含まれる各AIS情報要素が示す他船舶の位置、速さ、移動方位等の情報を、搭載船舶の位置を座標系原点とした情報に変換する。そして、座標変換後のAIS他船舶情報をAIS他船舶情報D5として補間部22に出力する。座標変換部20の処理によって、レーダ解析情報D3およびAIS他船舶情報D5に対する座標系を統一することができる。
【0019】
なお、ここでは、レーダ解析情報D2に含まれる情報およびAIS他船舶情報D4に含まれる情報を、搭載船舶の位置を原点とした座標系で表した情報に変換することとしているが、地球に固定された絶対座標系で表した情報に変換することとしてもよい。
【0020】
上記のように、レーダ装置12は、レーダアンテナが1回転する毎に1画像分の物標イメージ情報D1を生成し出力する。レーダデータ解析装置14は、物標イメージ情報D1が生成された時刻に対応するレーダ解析情報D2を出力する。一方、船舶自動識別装置18は、レーダアンテナの回転周期とは必ずしも一致しない所定の時間間隔でAIS他船舶情報D4を生成し出力する。
【0021】
これに伴い、座標変換部20からは、互いに異なる時刻に生成されたレーダ解析情報D3およびAIS他船舶情報D5が出力される。本実施形態に係る船舶搭載用航行支援システム10では、船舶自動識別装置18およびレーダ解析装置14が出力する情報を、共通の表示装置34で表示する。そのため、後述のように、座標変換部20から出力された2つの情報を比較し、同一他船舶に関する情報についてはこれらを選択的に表示する。このような相関処理を行うためには、比較対象の2つの情報が同一時刻に得られた情報であることが好ましい。そこで、補間部22は、AIS他船舶情報D5に対して時間補間処理を行う。
【0022】
補間部22は、時間補間処理に必要な情報量だけ、AIS他船舶情報D5を記憶する。そして、レーダデータ解析装置14でレーダ解析情報D2が生成された時刻における補間情報が得られるよう、AIS他船舶情報D5に含まれる各AIS情報要素の位置情報に対し補間処理を施す。そして、補間処理後の情報を補間・AIS他船舶情報D6として求める。
【0023】
例えば、船舶自動識別装置18の情報生成時間間隔がτであり、船舶自動識別装置18が、時刻t1、t1+τ、t1+2τ、t1+3τ、・・・にAIS他船舶情報D4を生成し出力する一方、レーダ装置12およびレーダデータ解析装置14の情報生成時間間隔がδであり、レーダ解析装置14が、時刻t2、t2+δ、t2+2δ、t2+3δ、・・・にレーダ解析情報D2を生成し出力する例について採り上げる。ここで、時刻t2は時刻t1から時刻t1+τの間の時刻であるものとする。この場合、補間部22は、座標変換部20から出力されたAIS他船舶情報D5に対し補間処理を施すことにより、時刻t2、t2+δ、t2+2δ、t2+3δ、・・・の各時刻における情報として推定された補間・AIS他船舶情報D6を求める。
【0024】
補間部22は、レーダ解析情報D3を相関判定部26に出力し、補間・AIS他船舶情報D6を情報限定部24に出力する。
【0025】
このような時間補間処理は、レーダデータ解析装置14の情報生成時間間隔が、船舶自動識別装置18の情報生成時間間隔よりも短い場合に好適である。一方、レーダデータ解析装置14の情報生成時間間隔が、船舶自動識別装置18の情報生成時間間隔よりも長い場合には、船舶自動識別装置18の情報生成時間間隔で補間情報が得られるよう、レーダデータ解析装置14が出力した情報に対し補間処理を施すことが好適である。
【0026】
情報限定部24は、測位装置16から出力された位置情報を参照し、補間・AIS他船舶情報D6に含まれる各AIS情報要素が示す他船舶について、搭載船舶の位置から所定の距離Rh以上の位置にあるか否かを判定する。情報限定部24は、搭載船舶の位置から所定の距離Rh以上の位置にある他船舶に対応するAIS情報要素を、補間・AIS他船舶情報D6から削除する。情報限定部24は、削除対象のAIS情報要素が削除された縮小・AIS他船舶情報D7を相関判定部26に出力する。なお、距離Rhは、後述のように、相関判定部26が実行する処理量、レーダデータ解析装置14および船舶自動識別装置18の各検出結果を選択表示する範囲等に応じて決定する。
【0027】
相関判定部26は、縮小・AIS他船舶情報D7に含まれるAIS情報要素が示す他船舶(以下、AIS他船舶とする。)と、レーダ解析情報D3に含まれるレーダ情報要素が示す物標(以下、検出物標とする。)とが同一物体であるか否かの相関判定を行う。そして、相関条件を満足するときは、判定対象のAIS他船舶に対応するAIS情報要素、および判定対象の検出物標に対応するレーダ情報要素を組とした表示組要素を表示制御部30に出力する。
【0028】
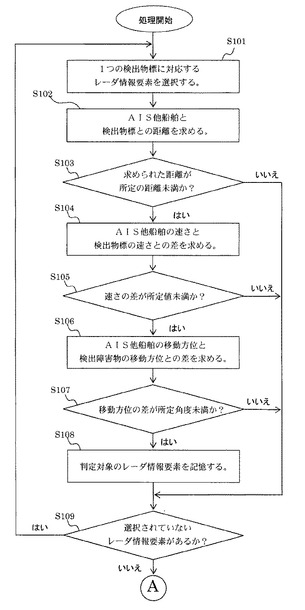
図2Aおよび図2Bに、相関判定処理のフローチャートを示す。図2Aおよび図2Bに記載された符号「A」は、この部分で図2Aのフローチャートと図2Bのフローチャートとが接続されることを示す。図2Aおよび図2Bのフローチャートが示す相関判定処理は、1つのAIS他船舶に対する処理を示す。すなわち、複数のAIS情報要素が縮小・AIS他船舶情報D7に含まれるときは、相関判定部26は、1つのAIS他船舶に対応するAIS情報要素を縮小・AIS他船舶情報D7から順に選択し、各AIS他船舶に対応するAIS情報要素に対し、図2Aおよび図2Bのフローチャートが示す処理を実行する。
【0029】
1つのAIS他船舶に対応するAIS情報要素を縮小・AIS他船舶情報D7から選択した後、相関判定部26は、レーダ解析情報D3から1つの検出物標に対応するレーダ情報要素を選択する(S101)。
【0030】
ここで、相関判定部26は、レーダ解析情報D3に含まれる各レーダ情報要素に対しステップS102以降の処理を実行する。そのため、ステップS101においては、いずれかのレーダ情報要素についてS102以降の処理を先に実行していた場合には、先の処理において処理対象となっていないレーダ情報要素を選択する。
【0031】
相関判定部26は、選択したAIS情報要素およびレーダ情報要素を参照し、AIS他船舶と検出物標との距離を求める(S102)。そして、求められた距離が所定の距離未満であるか否かを判定する(S103)。
【0032】
相関判定部26は、求められた距離が所定の距離以上であるときは、ステップS109の処理に移行する。一方、求められた距離が所定の距離未満であるときは、選択したAIS情報要素およびレーダ情報要素を参照し、AIS他船舶の速さと検出物標の速さとの差を求める(S104)。そして、速さの差が所定の速さ未満であるか否かを判定する(S105)。
【0033】
相関判定部26は、速さの差が所定の速さ以上であるときは、ステップS109の処理に移行する。一方、速さの差が所定の速さ未満であるときは、選択したAIS情報要素およびレーダ情報要素を参照し、AIS他船舶の移動方位と検出物標の移動方位との差を求める(S106)。そして、移動方位の差が所定角度未満であるか否かを判定する(S107)。
【0034】
相関判定部26は、求められた移動方位の差が所定角度以上であるときは、ステップS109の処理に移行する。一方、求められた速さの差が所定の角度未満であるときは、判定対象のレーダ情報要素を、相関判定部26が備える記憶部28に記憶する(S108)。
【0035】
相関判定部26は、レーダ解析情報D3に含まれるレーダ情報要素のうち、S102〜S108までの処理対象として選択されていないものがあるか否かを判定する(S109)。そして、処理対象として選択されていないものがある場合には、ステップS101の処理に戻る。一方、レーダ解析情報D3に含まれる総てのAIS他船舶が選択された場合には、ステップS110の処理に移行する。
【0036】
ステップS101〜S109によれば、判定対象の検出物標が、判定対象のAIS他船舶との間で、距離、速さ、および移動方位に関する相関条件を満たす場合には、その検出物標に対応するレーダ情報要素が記憶部28に記憶される。記憶部28にレーダ情報要素が記憶された検出物標(以下、高相関物標とする。)は、判定対象のAIS他船舶と同一物体である可能性が高い。1つの判定対象のAIS他船舶に対し、上記相関条件を満たす高相関物標が1つある場合には、そのAIS他船舶と検出物標とを同一物体とした表示を行えばよい。
【0037】
しかし、高相関物標が複数ある場合には、その複数の高相関物標のうちからAIS他船舶と同一物体であるものを更なる相関条件に基づいて1つに絞り込むことが好ましい。
【0038】
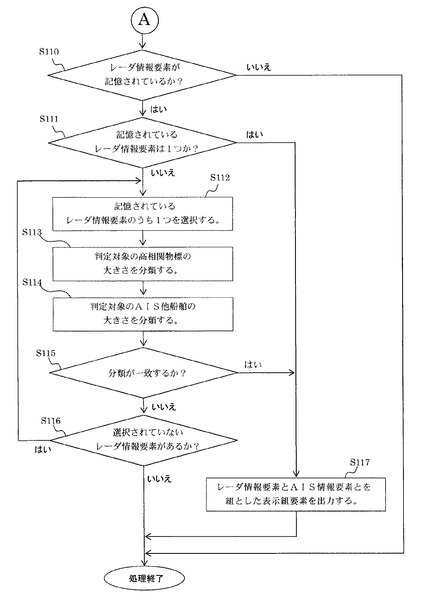
そこで、ステップS110以降の処理では、1つのレーダ情報要素が記憶部28に記憶されている場合、2以上のレーダ情報要素が記憶部28に記憶されている場合、およびレーダ情報要素が記憶部28に記憶されていない場合に場合分けをする。そして、2以上のレーダ情報要素が記憶部28に記憶されている場合には、AIS他船舶と同一物体であるものを絞り込む処理を実行する。
【0039】
相関判定部26は、記憶部28にレーダ情報要素が記憶されているか否かを判定する(S110)。そして、レーダ情報要素が記憶されていないときは現時点の判定対象のAIS他船舶に対する相関判定処理を終了し、レーダ情報要素が記憶されているときはステップS111の処理に移行する。
【0040】
相関判定部26は、記憶部28に記憶されているレーダ情報要素が1つであるか否かを判定する(S111)。そして、記憶されているレーダ情報要素が1つである場合には、そのレーダ情報要素と現時点の判定対象のAIS他船舶に対応するAIS情報要素とを含む表示組要素を表示制御部30に出力し(S117)、現時点の判定対象のAIS他船舶に対する相関判定処理を終了する。
【0041】
相関判定部26は、記憶部28に記憶されているレーダ情報要素が2以上あるときは、1つのレーダ情報要素を選択し記憶部28から読み込む(S112)。
【0042】
ここで、相関判定部26は、記憶部28に記憶されている複数のレーダ情報要素を順に選択し、ステップS113以降の処理を実行する。そのため、ステップS112においては、記憶部28に記憶されているいずれかのレーダ情報要素についてS113以降の処理を先に実行していた場合には、先の処理において処理対象となっていないレーダ情報要素を選択する。
【0043】
相関判定部26は、選択したレーダ情報要素が示す高相関物標について、大きさを分類する(S113)。大きさの分類は、具体的には、次の処理に基づいて行うことができる。
【0044】
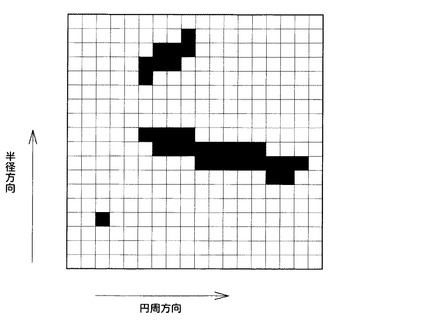
相関判定部26は、物標イメージ情報D1を参照し、選択したレーダ情報要素が示す高相関物標の水平面投影面積を求める。ここで水平面投影面積は、物標イメージ情報D1が示す画像上で物標の像が占める面積をいう。図3は物標イメージ情報D1をピクセル配列を以て示したものである。図3における1つの升目は、画像を表す1つのピクセルを示す。縦方向は搭載船舶を原点とした極座標の半径方向を示し、横方向は搭載船舶を原点とした極座標の円周方向を示す。図3の黒色で示したピクセルは、物標の像を示す。この例では、相関判定部26は、黒色のピクセル数を以て高相関物標の水平面投影面積を求める。
【0045】
相関判定部26は、水平面投影面積が第1判定値未満であれば小型船舶、水平面投影面積が第1判定面積以上かつ第2判定面積未満であれば中型船舶、水平面投影面積が第2判定面積以上であれば大型船舶、というように、大きさの異なる複数の判定値に基づいて高相関物標の分類を行う。
【0046】
相関判定部26は、判定対象のAIS他船舶に対応するレーダ情報要素を参照し、そのAIS他船舶の長さまたは幅に基づいて、大きさを分類する(S114)。大きさの分類は、例えば、長さが第1判定長さ未満であれば小型船舶、長さが第1判定長さ以上かつ長さが第2判定長さ未満であれば中型船舶、長さが第2判定長さ以上であれば大型船舶、というように、大きさの異なる複数の判定値に基づいて行う。AIS他船舶の幅に基づく判定についても、AIS他船舶の長さに基づく判定と同様にして行うことができる。
【0047】
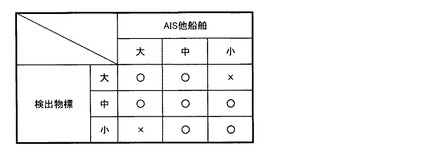
相関判定部26は、高相関物標とAIS他船舶との分類が一致するか否かを判定する(S115)。判定は、例えば、図4に示すテーブルに基づいて行うことができる。横方向の区分はAIS他船舶の大きさ分類を示し、縦方向の区分は検出物標の大きさ分類を示す。○印は一致する旨の判定を示し、×印は一致しない旨の判定を示す。このテーブルに従う判定によれば、AIS他船舶または検出物標のいずれか一方が小型船舶であると分類され、他方が大型船舶であると分類されたときに限り、これらの物体の分類が一致しないと判定される。
【0048】
相関判定部26は、分類が一致するときは、判定対象の高相関物標に対応するレーダ情報要素と判定対象のAIS他船舶に対するAIS情報要素とを含む表示組要素を表示制御部30に出力し(S117)、現時点の判定対象のAIS他船舶に対する相関判定処理を終了する。
【0049】
一方、分類が一致しないときは、相関判定部26は、記憶部28に記憶されているレーダ情報要素のうち、ステップS113〜S115の処理対象として選択されていないものがあるか否かを判定する(S116)。そして、処理対象として選択されていないものがある場合には、ステップS112の処理に戻る。一方、記憶部28に記憶されている総てのレーダ情報要素が選択された場合には、相関判定部26は、現時点の判定対象のAIS他船舶に対する相関判定処理を終了する。
【0050】
相関判定部26は、図2Aおよび図2Bのフローチャートに示される相関判定処理を、縮小・AIS他船舶情報D7に含まれる総てのAIS他船舶に対して行う。
【0051】
総てのAIS他船舶について相関判定処理を実行した後、相関判定部26は、縮小・AIS他船舶情報D7が示す総てのAIS他船舶のうち、いずれの検出物標との間でも相関条件を満足しないものに対応するAIS情報要素を、単独AIS情報要素として表示制御部30に出力する。また、レーダ解析情報D3が示す総ての検出物標のうち、いずれのAIS他船舶との間でも相関条件を満足しないものに対応するレーダ情報要素を、単独レーダ情報要素として表示制御部30に出力する。
【0052】
このような処理によれば、AIS他船舶および検出物標の組のうち、距離、速さ、および移動方位についての相関条件に加え、大きさについての相関条件を満足する組については、表示組要素が表示制御部30に出力される。表示制御部30は、表示組要素を用いることにより、同一物体である可能性が高いAIS他船舶および検出物標のうち少なくともいずれかを、選択的に表示装置34にシンボル表示することができる。
【0053】
また、単独AIS情報要素、および単独レーダ情報要素が表示制御部30に出力されることで、表示制御部30は、相関条件を満足する検出物標が存在しないAIS他船舶、および相関条件を満足するAIS他船舶が存在しない検出物標を、表示組要素とは別に表示装置34にシンボル表示することができる。
【0054】
なお、相関判定処理のステップS104およびS106では、それぞれ、検出対象物の速さおよび移動方位に基づく判定を行っている。これらの処理ステップは、必ずしも両者を実行する必要はなく、これらのうちいずれかまたは両者を省略してもよい。
【0055】
次に、表示制御部30、表示設定部32および表示装置34による表示処理について説明する。船舶搭載用航行支援システム10では、相関条件を満足するAIS他船舶および検出物標の両者をシンボル表示する重ね表示モード、AIS他船舶のみをシンボル表示するAISモード、または検出物標のみをシンボル表示する検出物標モードのうち、いずれかのモードでの表示が可能である。
【0056】
表示設定部32は、重ね表示モード、AISモード、または検出物標モードのうち、いずれのモードで表示を行うかを設定するモード設定情報をユーザの操作により取得する。表示設定部32は、表示設定部32に接続されたコンピュータ等の情報処理装置からモード設定情報を読み込む構成としてもよい。表示設定部32は、モード設定情報を表示制御部30に出力する。
【0057】
表示制御部30は、重ね表示モードに設定すべき旨のモード設定情報が出力されたときは、表示組要素が示すAIS他船舶および検出物標の各シンボルを表示装置34に表示する。また、表示制御部30は、AISモードに設定すべき旨のモード設定情報が出力されたときは、表示組要素が示すAIS他船舶および検出物標のうち、AIS他船舶のシンボルを表示装置34に表示し、検出物標モードに設定すべき旨のモード設定情報が出力されたときは、表示組要素が示すAIS他船舶および検出物標のうち、検出物標のシンボルを表示装置34に表示する。
【0058】
また、表示制御部30は、単独AIS情報要素が示すAIS他船舶のシンボル、および単独レーダ情報要素が示す検出物標のシンボルを表示装置34に表示する。表示制御部30は、さらに、物標イメージ情報D1に基づく物標の像を表示装置34に表示する。
【0059】
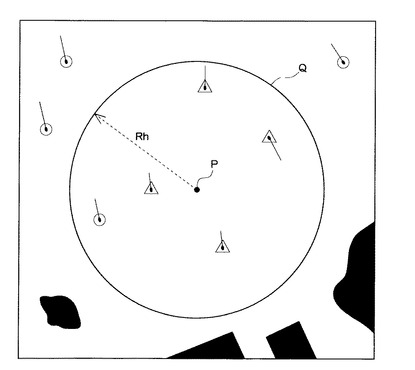
図5にAISモードにおける表示装置34による表示例を示す。図5の外枠は表示画面の外枠を示し点Pは搭載船舶の位置を示す。図5の円Qは搭載船舶の位置を中心とする半径Rhの円を示す。図5の三角形のシンボルはAIS他船舶の位置を示し、円形のシンボルは検出物標の位置を示す。各シンボルから引き出された直線の向きは、表示対象物の移動方向を示す。図5では引き出し方向が進行方向を示す。各シンボルから引き出された直線の長さは、表示対象物の速さを示す。また、図5の黒色で塗りつぶされた領域は、物標イメージ情報D1が示す像である。
【0060】
図5のシンボルの傍らには、AIS他船舶としての名称、長さ、幅、位置、速さ、移動方位等を縮小・AIS他船舶情報D7に基づいてテキスト表示してもよい。また、検出物標としての位置、速さ、移動方位等をレーダ解析情報D3に基づいてテキスト表示してもよい。縮小・AIS他船舶情報D7に基づくテキスト表示をするか否かの設定、およびレーダ解析情報D3に基づくテキスト表示をするか否かの設定は、表示設定部32が読み込み表示制御部30に出力する設定情報に基づいて行うことができる。縮小・AIS他船舶情報D7に基づくテキスト表示、またはレーダ解析情報D3に基づくテキスト表示は、設定情報に基づき表示制御部30が行う。
【0061】
上記のように、情報限定部24は、搭載船舶の位置から所定の距離Rh以上の位置にある他船舶に対応する情報を補間・AIS他船舶情報D6から削除し、縮小・AIS他船舶情報D7を求める。したがって、搭載船舶の位置から所定の距離Rh以上の位置にある他船舶については、単独レーダ情報要素に基づく表示がなされる。そのため、円Qの外側には検出物標を示す円形のシンボルのみが示され、AIS他船舶を示す三角形のシンボルは表示されない。
【0062】
円Qの内側に描かれている円形のシンボルは、単独レーダ情報要素に基づくものであり、船舶自動識別装置18によっては検出されず、レーダ装置12によってのみ検出された物標を示す。また、円Qの内側に描かれている三角形のシンボルは、単独AIS情報要素に基づくもの、または、表示組要素に含まれるAIS情報要素に基づくものである。すなわち、レーダ装置12によって検出されず、船舶自動識別装置18によってのみ検出された他船舶、または、レーダ装置12および船舶自動識別装置18のいずれによっても検出され、AISモードに基づく処理によってAIS他船舶として表示された他船舶を示す。
【0063】
本実施形態に係る表示処理によれば、レーダ装置12によって検出された物標と、船舶自動識別装置18によって検出された他船舶が同一物体である可能性が高いときは、レーダ情報要素とAIS情報要素とを組とした表示組要素が相関判定部26から表示制御部30に出力される。そして、表示設定部32によるモード設定に従い、検出物標を示すシンボルおよびAIS他船舶を示すシンボルのうち少なくともいずれかを選択的に表示することができる。AISモードまたは検出物標モードを選択することにより、同一の検出対象物を示す2つのシンボルが重ねて表示されることを回避することができる。また、重ね表示モードを選択することにより、検出物標を示すシンボルおよびAIS他船舶を示すシンボルの両者を表示し、レーダ装置12の検出結果と船舶自動識別装置18の検出結果との相違を確認することができる。
【0064】
また、相関判定処理では、総てのAIS他船舶のそれぞれに図2Aおよび図2Bの相関判定処理が実行される。したがって、判定対象のAIS他船舶の数が少ない程、相関判定処理の処理量を少なくすることができる。そのため、本実施形態では、情報限定部24が、搭載船舶の位置から所定の距離Rh以上の位置にある他船舶に対応する情報を補間・AIS他船舶情報D6から削除した、縮小・AIS他船舶情報D7を用いる。これによって、補間部22から出力される補間・AIS他船舶情報D6をそのまま用いる場合に比して、相関判定処理で行われる処理量を減少させることができ、迅速な表示を行うことができる。
【0065】
また、本実施形態では、円Qの内側にレーダ装置12および船舶自動識別装置18の少なくともいずれかの検出結果を表示モードに応じて表示する。円Qの半径を大きくすることにより、表示モードに基づいて選択表示をする範囲を広くすることができる一方、相関判定処理で行われる処理量が増加する。したがって、円Qの半径を決定する距離Rhは、レーダ装置12および船舶自動識別装置18の各検出結果を選択表示する範囲を広くすべきか、相関判定処理の処理量を低減すべきであるかに基づいて決定することが好ましい。距離Rhの設定は、船舶搭載用航行支援システム10の入力装置から情報限定部24へと距離Rhの値を読み込ませることで行うことができる。
【0066】
なお、上記の実施形態では、補間・AIS他船舶情報D6に対して情報限定部24による処理を施し、縮小・AIS他船舶情報の各AIS情報要素に対し、図2Aおよび図2Bの相関判定処理を実行するものとした。すなわち、相関判定部26は、1つのAIS他船舶に対応するAIS情報要素を縮小・AIS他船舶情報D6から順に選択し、各AIS他船舶について総ての検出物標との間で相関判定処理を実行する。このような処理の他、補間・AIS他船舶情報D6と、レーダ解析情報D3を入れ換えた処理を実行してもよい。
【0067】
この場合、情報限定部24による処理をレーダ解析情報D3に対して施し、搭載船舶の位置から所定の距離Rh以上の位置にある検出物標に対応するレーダ情報要素を、レーダ解析情報D3から削除する。
【0068】
そして、相関判定部26は、1つの検出物標に対応するレーダ情報要素を情報限定されたレーダ解析情報D3から順に選択し、各検出物標について総てのAIS他船舶との間で相関判定処理を実行する。
【0069】
これによって、上記の実施形態と同様、同一物体である可能性の高い検出物標およびAIS他船舶については、検出物標を示すシンボルおよびAIS他船舶を示すシンボルのうち少なくともいずれかを選択的に表示することができる。また、レーダ解析情報D3から一部の情報を削除することにより、相関判定処理で行われる処理量を減少させることができ、迅速な表示を行うことができる。
【符号の説明】
【0070】
10 船舶搭載用航行支援システム、12 レーダ装置、14 レーダデータ解析装置、16 測位装置、18 船舶自動識別装置、20 座標変換部、22 補間部、24 情報限定部、26 相関判定部、28 記憶部、30 表示制御部、32 表示設定部、34 表示装置。
【技術分野】
【0001】
本発明は、他船舶情報を取得する船舶識別装置と、船舶レーダ装置とを備える船舶搭載用航行支援システムに関する。
【背景技術】
【0002】
船舶にはレーダ装置の他、船舶自動識別装置(AIS:Automatic Identification System)が搭載されることが多い。レーダ装置は、物標検出用の電磁波を送信する。そして、物標で反射した電磁波を受信することにより、水面に対応する平面上に物標の像を表す物標イメージ情報を生成し表示する。船舶自動識別装置は、搭載船舶名称、搭載船舶の大きさ、位置、速さ、移動方位等を含む情報を報知送信すると共に他船舶から報知送信された情報を受信し、他船舶に関する情報を表示する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−182539号公報
【特許文献2】特開2003−288698号公報
【特許文献3】特開2003−48595号公報
【特許文献4】特開2002−372583号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
レーダ装置では、検出すべき他船舶と自船舶との間に電磁波を遮る物がある場合には、送信した電磁波が遮蔽物によって遮られ、他船舶を検出できないことがある。また、船舶自動識別装置では、船舶自動識別装置が他船舶に搭載されていない場合や、他船舶に搭載された船舶自動識別装置がオフ状態とされている場合には、他船舶を検出することができない。そこで、他船舶を漏れなく表示するため、これらの装置を組み合わせ、各検出結果を同一の表示装置に重ねて表示することが考えられる。しかし、各装置の検出結果を重ねて表示すると、同一の他船舶が重複して表示されることとなり、表示が見難くなる。
【0005】
本発明はこのような課題に対してなされたものである。他船舶を検出する2つの装置の検出結果を、1つの表示装置に見易く表示することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、他船舶から送信された情報に基づいて他船舶情報を取得する船舶識別装置と、物標の検出を行う船舶レーダ装置と、を備える船舶搭載用航行支援システムにおいて、前記船舶識別装置および前記船舶レーダ装置に共有される表示装置と、前記他船舶情報が示す他船舶と、前記船舶レーダ装置が検出した物標と、が同一物体であるか否かを判定する判定部と、前記判定部が同一物体である旨の判定をしたときに、当該判定対象となった他船舶または物標のいずれか一方を前記表示装置に表示させる表示制御部と、を備え、前記判定部は、他船舶の大きさと物標の大きさとの比較に基づく判定を行うことを特徴とする。
【0007】
また、本発明は、他船舶から送信された情報に基づいて他船舶情報を取得する船舶識別装置と、物標の検出を行う船舶レーダ装置と、を備える船舶搭載用航行支援システムにおいて、前記船舶識別装置および前記船舶レーダ装置に共有される表示装置と、前記他船舶情報が示す他船舶と、前記船舶レーダ装置が検出した物標と、が同一物体であるか否かを判定する判定部と、前記判定部が同一物体である旨の判定をしたときに、当該判定対象となった他船舶若しくは物標のいずれか一方を前記表示装置に表示させる第1表示モード、または、当該判定対象となった他船舶および物標の両方を前記表示装置に表示させる第2表示モードのいずれかの表示モードで表示する表示制御部と、を備え、前記判定部は、他船舶の大きさと物標の大きさとの比較に基づく判定を行うことを特徴とする
【0008】
また、本発明に係る船舶搭載用航行支援システムにおいては、前記判定部は、他船舶の位置と物標の位置との比較、他船舶の移動方位と物標の移動方位との比較、および他船舶の速さと物標の速さとの比較のうち、少なくともいずれかに基づく判定を行うことが好適である。
【0009】
また、本発明に係る船舶搭載用航行支援システムにおいては、前記判定部は、船舶の位置情報および物標の位置情報が同一時刻における情報を示すよう、離散的に検出された前記船舶レーダ装置の検出情報を時間補間し、または、離散的に取得された前記他船舶情報を時間補間する補間手段、を備えることが好適である。
【発明の効果】
【0010】
本発明によれば、他船舶を検出する2つの装置の検出結果を1つの表示装置に見易く表示することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の実施形態に係る船舶搭載用航行支援システムの構成を示す図である。
【図2A】相関判定処理のフローチャートである。
【図2B】相関判定処理のフローチャートである。
【図3】物標イメージ情報をピクセル配列を以て示した図である。
【図4】選択AIS他船舶の大きさ分類と、検出物標の大きさ分類とが一致するか否かを判定するためのテーブルを示す図である。
【図5】表示装置における表示例を示す図である。
【発明を実施するための形態】
【0012】
図1に本発明の実施形態に係る船舶搭載用航行支援システム10の構成を示す。船舶搭載用航行支援システム10は、レーダ装置12および船舶自動識別装置18を備え、これらの検出結果に基づいて他船舶の位置を示す画像を生成し、表示装置34に表示する。
【0013】
レーダ装置12は、物標検出用の電磁波を送信し、物標で反射した電磁波を受信する。レーダ装置12が受信する電磁波の波形は、送受信方向に垂直な方向からみた物標の像を示す。レーダ装置12は、電磁波の送受信方位を変化させつつ、送受信方位に対応する受信電磁波の波形を合成することにより、水面に対応する平面上に物標の像を表す物標イメージ情報D1を生成する。レーダ装置12は、レーダアンテナが1回転する毎に1画像分の物標イメージ情報D1を生成し、物標イメージ情報D1をレーダデータ解析装置14、相関判定部26、および表示制御部30に出力する。
【0014】
レーダデータ解析装置14は、物標イメージ情報D1に基づいて各物標の位置を求める。そして、物標イメージ情報D1の時間変化に基づいて各物標の速さおよび移動方位を求め、物標の位置情報に速さおよび移動方位を対応付けたレーダ情報要素を各物標について求める。レーダデータ解析装置14は、各物標に対応するレーダ情報要素を含むレーダ解析情報D2を生成し座標変換部20に出力する。なお、このようなレーダデータ解析装置14として、自動衝突予防援助装置(ARPA:Automatic Radar Plotting Aids)を用いることができる。
【0015】
測位装置16は、GPS受信機、ジャイロ測位装置等を備え、地球に固定された絶対座標の原点を基準とした搭載船舶の位置を測定する。測位装置16は、測定によって得られた位置情報を、座標変換部20および情報限定部24に出力する。
【0016】
船舶自動識別装置18は、測位装置16から位置情報を取得する。また、搭載船舶に搭載された速度計測器、針路計測器等から、搭載船舶の速さおよび移動方位を取得する。そして、搭載船舶名称、搭載船舶の長さ、幅、位置、速さ、移動方位等を含む搭載船舶情報を生成し報知送信する。
【0017】
船舶自動識別装置18は、同様の装置を備える他船舶から報知送信された情報を受信する。そして、受信した情報に基づいて、他船舶の長さ、幅、位置、速さ、移動方位等を対応付けたAIS情報要素を、他船舶のそれぞれについて求める。船舶自動識別装置18は、各他船舶に対応するAIS情報要素を含むAIS他船舶情報D4を生成し、座標変換部20に出力する。
【0018】
座標変換部20は、測位装置16から出力された搭載船舶の位置情報に基づいて、レーダ解析情報D2に含まれる各レーダ情報要素が示す他船舶の位置、速さ、移動方位等の情報を、搭載船舶の位置を座標系原点とした情報に変換する。そして、座標変換後のレーダ解析情報をレーダ解析情報D3として補間部22に出力する。また、座標変換部20は、測位装置16から出力された搭載船舶の位置情報に基づいて、AIS他船舶情報D4に含まれる各AIS情報要素が示す他船舶の位置、速さ、移動方位等の情報を、搭載船舶の位置を座標系原点とした情報に変換する。そして、座標変換後のAIS他船舶情報をAIS他船舶情報D5として補間部22に出力する。座標変換部20の処理によって、レーダ解析情報D3およびAIS他船舶情報D5に対する座標系を統一することができる。
【0019】
なお、ここでは、レーダ解析情報D2に含まれる情報およびAIS他船舶情報D4に含まれる情報を、搭載船舶の位置を原点とした座標系で表した情報に変換することとしているが、地球に固定された絶対座標系で表した情報に変換することとしてもよい。
【0020】
上記のように、レーダ装置12は、レーダアンテナが1回転する毎に1画像分の物標イメージ情報D1を生成し出力する。レーダデータ解析装置14は、物標イメージ情報D1が生成された時刻に対応するレーダ解析情報D2を出力する。一方、船舶自動識別装置18は、レーダアンテナの回転周期とは必ずしも一致しない所定の時間間隔でAIS他船舶情報D4を生成し出力する。
【0021】
これに伴い、座標変換部20からは、互いに異なる時刻に生成されたレーダ解析情報D3およびAIS他船舶情報D5が出力される。本実施形態に係る船舶搭載用航行支援システム10では、船舶自動識別装置18およびレーダ解析装置14が出力する情報を、共通の表示装置34で表示する。そのため、後述のように、座標変換部20から出力された2つの情報を比較し、同一他船舶に関する情報についてはこれらを選択的に表示する。このような相関処理を行うためには、比較対象の2つの情報が同一時刻に得られた情報であることが好ましい。そこで、補間部22は、AIS他船舶情報D5に対して時間補間処理を行う。
【0022】
補間部22は、時間補間処理に必要な情報量だけ、AIS他船舶情報D5を記憶する。そして、レーダデータ解析装置14でレーダ解析情報D2が生成された時刻における補間情報が得られるよう、AIS他船舶情報D5に含まれる各AIS情報要素の位置情報に対し補間処理を施す。そして、補間処理後の情報を補間・AIS他船舶情報D6として求める。
【0023】
例えば、船舶自動識別装置18の情報生成時間間隔がτであり、船舶自動識別装置18が、時刻t1、t1+τ、t1+2τ、t1+3τ、・・・にAIS他船舶情報D4を生成し出力する一方、レーダ装置12およびレーダデータ解析装置14の情報生成時間間隔がδであり、レーダ解析装置14が、時刻t2、t2+δ、t2+2δ、t2+3δ、・・・にレーダ解析情報D2を生成し出力する例について採り上げる。ここで、時刻t2は時刻t1から時刻t1+τの間の時刻であるものとする。この場合、補間部22は、座標変換部20から出力されたAIS他船舶情報D5に対し補間処理を施すことにより、時刻t2、t2+δ、t2+2δ、t2+3δ、・・・の各時刻における情報として推定された補間・AIS他船舶情報D6を求める。
【0024】
補間部22は、レーダ解析情報D3を相関判定部26に出力し、補間・AIS他船舶情報D6を情報限定部24に出力する。
【0025】
このような時間補間処理は、レーダデータ解析装置14の情報生成時間間隔が、船舶自動識別装置18の情報生成時間間隔よりも短い場合に好適である。一方、レーダデータ解析装置14の情報生成時間間隔が、船舶自動識別装置18の情報生成時間間隔よりも長い場合には、船舶自動識別装置18の情報生成時間間隔で補間情報が得られるよう、レーダデータ解析装置14が出力した情報に対し補間処理を施すことが好適である。
【0026】
情報限定部24は、測位装置16から出力された位置情報を参照し、補間・AIS他船舶情報D6に含まれる各AIS情報要素が示す他船舶について、搭載船舶の位置から所定の距離Rh以上の位置にあるか否かを判定する。情報限定部24は、搭載船舶の位置から所定の距離Rh以上の位置にある他船舶に対応するAIS情報要素を、補間・AIS他船舶情報D6から削除する。情報限定部24は、削除対象のAIS情報要素が削除された縮小・AIS他船舶情報D7を相関判定部26に出力する。なお、距離Rhは、後述のように、相関判定部26が実行する処理量、レーダデータ解析装置14および船舶自動識別装置18の各検出結果を選択表示する範囲等に応じて決定する。
【0027】
相関判定部26は、縮小・AIS他船舶情報D7に含まれるAIS情報要素が示す他船舶(以下、AIS他船舶とする。)と、レーダ解析情報D3に含まれるレーダ情報要素が示す物標(以下、検出物標とする。)とが同一物体であるか否かの相関判定を行う。そして、相関条件を満足するときは、判定対象のAIS他船舶に対応するAIS情報要素、および判定対象の検出物標に対応するレーダ情報要素を組とした表示組要素を表示制御部30に出力する。
【0028】
図2Aおよび図2Bに、相関判定処理のフローチャートを示す。図2Aおよび図2Bに記載された符号「A」は、この部分で図2Aのフローチャートと図2Bのフローチャートとが接続されることを示す。図2Aおよび図2Bのフローチャートが示す相関判定処理は、1つのAIS他船舶に対する処理を示す。すなわち、複数のAIS情報要素が縮小・AIS他船舶情報D7に含まれるときは、相関判定部26は、1つのAIS他船舶に対応するAIS情報要素を縮小・AIS他船舶情報D7から順に選択し、各AIS他船舶に対応するAIS情報要素に対し、図2Aおよび図2Bのフローチャートが示す処理を実行する。
【0029】
1つのAIS他船舶に対応するAIS情報要素を縮小・AIS他船舶情報D7から選択した後、相関判定部26は、レーダ解析情報D3から1つの検出物標に対応するレーダ情報要素を選択する(S101)。
【0030】
ここで、相関判定部26は、レーダ解析情報D3に含まれる各レーダ情報要素に対しステップS102以降の処理を実行する。そのため、ステップS101においては、いずれかのレーダ情報要素についてS102以降の処理を先に実行していた場合には、先の処理において処理対象となっていないレーダ情報要素を選択する。
【0031】
相関判定部26は、選択したAIS情報要素およびレーダ情報要素を参照し、AIS他船舶と検出物標との距離を求める(S102)。そして、求められた距離が所定の距離未満であるか否かを判定する(S103)。
【0032】
相関判定部26は、求められた距離が所定の距離以上であるときは、ステップS109の処理に移行する。一方、求められた距離が所定の距離未満であるときは、選択したAIS情報要素およびレーダ情報要素を参照し、AIS他船舶の速さと検出物標の速さとの差を求める(S104)。そして、速さの差が所定の速さ未満であるか否かを判定する(S105)。
【0033】
相関判定部26は、速さの差が所定の速さ以上であるときは、ステップS109の処理に移行する。一方、速さの差が所定の速さ未満であるときは、選択したAIS情報要素およびレーダ情報要素を参照し、AIS他船舶の移動方位と検出物標の移動方位との差を求める(S106)。そして、移動方位の差が所定角度未満であるか否かを判定する(S107)。
【0034】
相関判定部26は、求められた移動方位の差が所定角度以上であるときは、ステップS109の処理に移行する。一方、求められた速さの差が所定の角度未満であるときは、判定対象のレーダ情報要素を、相関判定部26が備える記憶部28に記憶する(S108)。
【0035】
相関判定部26は、レーダ解析情報D3に含まれるレーダ情報要素のうち、S102〜S108までの処理対象として選択されていないものがあるか否かを判定する(S109)。そして、処理対象として選択されていないものがある場合には、ステップS101の処理に戻る。一方、レーダ解析情報D3に含まれる総てのAIS他船舶が選択された場合には、ステップS110の処理に移行する。
【0036】
ステップS101〜S109によれば、判定対象の検出物標が、判定対象のAIS他船舶との間で、距離、速さ、および移動方位に関する相関条件を満たす場合には、その検出物標に対応するレーダ情報要素が記憶部28に記憶される。記憶部28にレーダ情報要素が記憶された検出物標(以下、高相関物標とする。)は、判定対象のAIS他船舶と同一物体である可能性が高い。1つの判定対象のAIS他船舶に対し、上記相関条件を満たす高相関物標が1つある場合には、そのAIS他船舶と検出物標とを同一物体とした表示を行えばよい。
【0037】
しかし、高相関物標が複数ある場合には、その複数の高相関物標のうちからAIS他船舶と同一物体であるものを更なる相関条件に基づいて1つに絞り込むことが好ましい。
【0038】
そこで、ステップS110以降の処理では、1つのレーダ情報要素が記憶部28に記憶されている場合、2以上のレーダ情報要素が記憶部28に記憶されている場合、およびレーダ情報要素が記憶部28に記憶されていない場合に場合分けをする。そして、2以上のレーダ情報要素が記憶部28に記憶されている場合には、AIS他船舶と同一物体であるものを絞り込む処理を実行する。
【0039】
相関判定部26は、記憶部28にレーダ情報要素が記憶されているか否かを判定する(S110)。そして、レーダ情報要素が記憶されていないときは現時点の判定対象のAIS他船舶に対する相関判定処理を終了し、レーダ情報要素が記憶されているときはステップS111の処理に移行する。
【0040】
相関判定部26は、記憶部28に記憶されているレーダ情報要素が1つであるか否かを判定する(S111)。そして、記憶されているレーダ情報要素が1つである場合には、そのレーダ情報要素と現時点の判定対象のAIS他船舶に対応するAIS情報要素とを含む表示組要素を表示制御部30に出力し(S117)、現時点の判定対象のAIS他船舶に対する相関判定処理を終了する。
【0041】
相関判定部26は、記憶部28に記憶されているレーダ情報要素が2以上あるときは、1つのレーダ情報要素を選択し記憶部28から読み込む(S112)。
【0042】
ここで、相関判定部26は、記憶部28に記憶されている複数のレーダ情報要素を順に選択し、ステップS113以降の処理を実行する。そのため、ステップS112においては、記憶部28に記憶されているいずれかのレーダ情報要素についてS113以降の処理を先に実行していた場合には、先の処理において処理対象となっていないレーダ情報要素を選択する。
【0043】
相関判定部26は、選択したレーダ情報要素が示す高相関物標について、大きさを分類する(S113)。大きさの分類は、具体的には、次の処理に基づいて行うことができる。
【0044】
相関判定部26は、物標イメージ情報D1を参照し、選択したレーダ情報要素が示す高相関物標の水平面投影面積を求める。ここで水平面投影面積は、物標イメージ情報D1が示す画像上で物標の像が占める面積をいう。図3は物標イメージ情報D1をピクセル配列を以て示したものである。図3における1つの升目は、画像を表す1つのピクセルを示す。縦方向は搭載船舶を原点とした極座標の半径方向を示し、横方向は搭載船舶を原点とした極座標の円周方向を示す。図3の黒色で示したピクセルは、物標の像を示す。この例では、相関判定部26は、黒色のピクセル数を以て高相関物標の水平面投影面積を求める。
【0045】
相関判定部26は、水平面投影面積が第1判定値未満であれば小型船舶、水平面投影面積が第1判定面積以上かつ第2判定面積未満であれば中型船舶、水平面投影面積が第2判定面積以上であれば大型船舶、というように、大きさの異なる複数の判定値に基づいて高相関物標の分類を行う。
【0046】
相関判定部26は、判定対象のAIS他船舶に対応するレーダ情報要素を参照し、そのAIS他船舶の長さまたは幅に基づいて、大きさを分類する(S114)。大きさの分類は、例えば、長さが第1判定長さ未満であれば小型船舶、長さが第1判定長さ以上かつ長さが第2判定長さ未満であれば中型船舶、長さが第2判定長さ以上であれば大型船舶、というように、大きさの異なる複数の判定値に基づいて行う。AIS他船舶の幅に基づく判定についても、AIS他船舶の長さに基づく判定と同様にして行うことができる。
【0047】
相関判定部26は、高相関物標とAIS他船舶との分類が一致するか否かを判定する(S115)。判定は、例えば、図4に示すテーブルに基づいて行うことができる。横方向の区分はAIS他船舶の大きさ分類を示し、縦方向の区分は検出物標の大きさ分類を示す。○印は一致する旨の判定を示し、×印は一致しない旨の判定を示す。このテーブルに従う判定によれば、AIS他船舶または検出物標のいずれか一方が小型船舶であると分類され、他方が大型船舶であると分類されたときに限り、これらの物体の分類が一致しないと判定される。
【0048】
相関判定部26は、分類が一致するときは、判定対象の高相関物標に対応するレーダ情報要素と判定対象のAIS他船舶に対するAIS情報要素とを含む表示組要素を表示制御部30に出力し(S117)、現時点の判定対象のAIS他船舶に対する相関判定処理を終了する。
【0049】
一方、分類が一致しないときは、相関判定部26は、記憶部28に記憶されているレーダ情報要素のうち、ステップS113〜S115の処理対象として選択されていないものがあるか否かを判定する(S116)。そして、処理対象として選択されていないものがある場合には、ステップS112の処理に戻る。一方、記憶部28に記憶されている総てのレーダ情報要素が選択された場合には、相関判定部26は、現時点の判定対象のAIS他船舶に対する相関判定処理を終了する。
【0050】
相関判定部26は、図2Aおよび図2Bのフローチャートに示される相関判定処理を、縮小・AIS他船舶情報D7に含まれる総てのAIS他船舶に対して行う。
【0051】
総てのAIS他船舶について相関判定処理を実行した後、相関判定部26は、縮小・AIS他船舶情報D7が示す総てのAIS他船舶のうち、いずれの検出物標との間でも相関条件を満足しないものに対応するAIS情報要素を、単独AIS情報要素として表示制御部30に出力する。また、レーダ解析情報D3が示す総ての検出物標のうち、いずれのAIS他船舶との間でも相関条件を満足しないものに対応するレーダ情報要素を、単独レーダ情報要素として表示制御部30に出力する。
【0052】
このような処理によれば、AIS他船舶および検出物標の組のうち、距離、速さ、および移動方位についての相関条件に加え、大きさについての相関条件を満足する組については、表示組要素が表示制御部30に出力される。表示制御部30は、表示組要素を用いることにより、同一物体である可能性が高いAIS他船舶および検出物標のうち少なくともいずれかを、選択的に表示装置34にシンボル表示することができる。
【0053】
また、単独AIS情報要素、および単独レーダ情報要素が表示制御部30に出力されることで、表示制御部30は、相関条件を満足する検出物標が存在しないAIS他船舶、および相関条件を満足するAIS他船舶が存在しない検出物標を、表示組要素とは別に表示装置34にシンボル表示することができる。
【0054】
なお、相関判定処理のステップS104およびS106では、それぞれ、検出対象物の速さおよび移動方位に基づく判定を行っている。これらの処理ステップは、必ずしも両者を実行する必要はなく、これらのうちいずれかまたは両者を省略してもよい。
【0055】
次に、表示制御部30、表示設定部32および表示装置34による表示処理について説明する。船舶搭載用航行支援システム10では、相関条件を満足するAIS他船舶および検出物標の両者をシンボル表示する重ね表示モード、AIS他船舶のみをシンボル表示するAISモード、または検出物標のみをシンボル表示する検出物標モードのうち、いずれかのモードでの表示が可能である。
【0056】
表示設定部32は、重ね表示モード、AISモード、または検出物標モードのうち、いずれのモードで表示を行うかを設定するモード設定情報をユーザの操作により取得する。表示設定部32は、表示設定部32に接続されたコンピュータ等の情報処理装置からモード設定情報を読み込む構成としてもよい。表示設定部32は、モード設定情報を表示制御部30に出力する。
【0057】
表示制御部30は、重ね表示モードに設定すべき旨のモード設定情報が出力されたときは、表示組要素が示すAIS他船舶および検出物標の各シンボルを表示装置34に表示する。また、表示制御部30は、AISモードに設定すべき旨のモード設定情報が出力されたときは、表示組要素が示すAIS他船舶および検出物標のうち、AIS他船舶のシンボルを表示装置34に表示し、検出物標モードに設定すべき旨のモード設定情報が出力されたときは、表示組要素が示すAIS他船舶および検出物標のうち、検出物標のシンボルを表示装置34に表示する。
【0058】
また、表示制御部30は、単独AIS情報要素が示すAIS他船舶のシンボル、および単独レーダ情報要素が示す検出物標のシンボルを表示装置34に表示する。表示制御部30は、さらに、物標イメージ情報D1に基づく物標の像を表示装置34に表示する。
【0059】
図5にAISモードにおける表示装置34による表示例を示す。図5の外枠は表示画面の外枠を示し点Pは搭載船舶の位置を示す。図5の円Qは搭載船舶の位置を中心とする半径Rhの円を示す。図5の三角形のシンボルはAIS他船舶の位置を示し、円形のシンボルは検出物標の位置を示す。各シンボルから引き出された直線の向きは、表示対象物の移動方向を示す。図5では引き出し方向が進行方向を示す。各シンボルから引き出された直線の長さは、表示対象物の速さを示す。また、図5の黒色で塗りつぶされた領域は、物標イメージ情報D1が示す像である。
【0060】
図5のシンボルの傍らには、AIS他船舶としての名称、長さ、幅、位置、速さ、移動方位等を縮小・AIS他船舶情報D7に基づいてテキスト表示してもよい。また、検出物標としての位置、速さ、移動方位等をレーダ解析情報D3に基づいてテキスト表示してもよい。縮小・AIS他船舶情報D7に基づくテキスト表示をするか否かの設定、およびレーダ解析情報D3に基づくテキスト表示をするか否かの設定は、表示設定部32が読み込み表示制御部30に出力する設定情報に基づいて行うことができる。縮小・AIS他船舶情報D7に基づくテキスト表示、またはレーダ解析情報D3に基づくテキスト表示は、設定情報に基づき表示制御部30が行う。
【0061】
上記のように、情報限定部24は、搭載船舶の位置から所定の距離Rh以上の位置にある他船舶に対応する情報を補間・AIS他船舶情報D6から削除し、縮小・AIS他船舶情報D7を求める。したがって、搭載船舶の位置から所定の距離Rh以上の位置にある他船舶については、単独レーダ情報要素に基づく表示がなされる。そのため、円Qの外側には検出物標を示す円形のシンボルのみが示され、AIS他船舶を示す三角形のシンボルは表示されない。
【0062】
円Qの内側に描かれている円形のシンボルは、単独レーダ情報要素に基づくものであり、船舶自動識別装置18によっては検出されず、レーダ装置12によってのみ検出された物標を示す。また、円Qの内側に描かれている三角形のシンボルは、単独AIS情報要素に基づくもの、または、表示組要素に含まれるAIS情報要素に基づくものである。すなわち、レーダ装置12によって検出されず、船舶自動識別装置18によってのみ検出された他船舶、または、レーダ装置12および船舶自動識別装置18のいずれによっても検出され、AISモードに基づく処理によってAIS他船舶として表示された他船舶を示す。
【0063】
本実施形態に係る表示処理によれば、レーダ装置12によって検出された物標と、船舶自動識別装置18によって検出された他船舶が同一物体である可能性が高いときは、レーダ情報要素とAIS情報要素とを組とした表示組要素が相関判定部26から表示制御部30に出力される。そして、表示設定部32によるモード設定に従い、検出物標を示すシンボルおよびAIS他船舶を示すシンボルのうち少なくともいずれかを選択的に表示することができる。AISモードまたは検出物標モードを選択することにより、同一の検出対象物を示す2つのシンボルが重ねて表示されることを回避することができる。また、重ね表示モードを選択することにより、検出物標を示すシンボルおよびAIS他船舶を示すシンボルの両者を表示し、レーダ装置12の検出結果と船舶自動識別装置18の検出結果との相違を確認することができる。
【0064】
また、相関判定処理では、総てのAIS他船舶のそれぞれに図2Aおよび図2Bの相関判定処理が実行される。したがって、判定対象のAIS他船舶の数が少ない程、相関判定処理の処理量を少なくすることができる。そのため、本実施形態では、情報限定部24が、搭載船舶の位置から所定の距離Rh以上の位置にある他船舶に対応する情報を補間・AIS他船舶情報D6から削除した、縮小・AIS他船舶情報D7を用いる。これによって、補間部22から出力される補間・AIS他船舶情報D6をそのまま用いる場合に比して、相関判定処理で行われる処理量を減少させることができ、迅速な表示を行うことができる。
【0065】
また、本実施形態では、円Qの内側にレーダ装置12および船舶自動識別装置18の少なくともいずれかの検出結果を表示モードに応じて表示する。円Qの半径を大きくすることにより、表示モードに基づいて選択表示をする範囲を広くすることができる一方、相関判定処理で行われる処理量が増加する。したがって、円Qの半径を決定する距離Rhは、レーダ装置12および船舶自動識別装置18の各検出結果を選択表示する範囲を広くすべきか、相関判定処理の処理量を低減すべきであるかに基づいて決定することが好ましい。距離Rhの設定は、船舶搭載用航行支援システム10の入力装置から情報限定部24へと距離Rhの値を読み込ませることで行うことができる。
【0066】
なお、上記の実施形態では、補間・AIS他船舶情報D6に対して情報限定部24による処理を施し、縮小・AIS他船舶情報の各AIS情報要素に対し、図2Aおよび図2Bの相関判定処理を実行するものとした。すなわち、相関判定部26は、1つのAIS他船舶に対応するAIS情報要素を縮小・AIS他船舶情報D6から順に選択し、各AIS他船舶について総ての検出物標との間で相関判定処理を実行する。このような処理の他、補間・AIS他船舶情報D6と、レーダ解析情報D3を入れ換えた処理を実行してもよい。
【0067】
この場合、情報限定部24による処理をレーダ解析情報D3に対して施し、搭載船舶の位置から所定の距離Rh以上の位置にある検出物標に対応するレーダ情報要素を、レーダ解析情報D3から削除する。
【0068】
そして、相関判定部26は、1つの検出物標に対応するレーダ情報要素を情報限定されたレーダ解析情報D3から順に選択し、各検出物標について総てのAIS他船舶との間で相関判定処理を実行する。
【0069】
これによって、上記の実施形態と同様、同一物体である可能性の高い検出物標およびAIS他船舶については、検出物標を示すシンボルおよびAIS他船舶を示すシンボルのうち少なくともいずれかを選択的に表示することができる。また、レーダ解析情報D3から一部の情報を削除することにより、相関判定処理で行われる処理量を減少させることができ、迅速な表示を行うことができる。
【符号の説明】
【0070】
10 船舶搭載用航行支援システム、12 レーダ装置、14 レーダデータ解析装置、16 測位装置、18 船舶自動識別装置、20 座標変換部、22 補間部、24 情報限定部、26 相関判定部、28 記憶部、30 表示制御部、32 表示設定部、34 表示装置。
【特許請求の範囲】
【請求項1】
他船舶から送信された情報に基づいて他船舶情報を取得する船舶識別装置と、
物標の検出を行う船舶レーダ装置と、
を備える船舶搭載用航行支援システムにおいて、
前記船舶識別装置および前記船舶レーダ装置に共有される表示装置と、
前記他船舶情報が示す他船舶と、前記船舶レーダ装置が検出した物標と、が同一物体であるか否かを判定する判定部と、
前記判定部が同一物体である旨の判定をしたときに、当該判定対象となった他船舶または物標のいずれか一方を前記表示装置に表示させる表示制御部と、
を備え、
前記判定部は、
他船舶の大きさと物標の大きさとの比較に基づく判定を行うことを特徴とする船舶搭載用航行支援システム。
【請求項2】
他船舶から送信された情報に基づいて他船舶情報を取得する船舶識別装置と、
物標の検出を行う船舶レーダ装置と、
を備える船舶搭載用航行支援システムにおいて、
前記船舶識別装置および前記船舶レーダ装置に共有される表示装置と、
前記他船舶情報が示す他船舶と、前記船舶レーダ装置が検出した物標と、が同一物体であるか否かを判定する判定部と、
前記判定部が同一物体である旨の判定をしたときに、当該判定対象となった他船舶若しくは物標のいずれか一方を前記表示装置に表示させる第1表示モード、または、当該判定対象となった他船舶および物標の両方を前記表示装置に表示させる第2表示モードのいずれかの表示モードで表示する表示制御部と、
を備え、
前記判定部は、
他船舶の大きさと物標の大きさとの比較に基づく判定を行うことを特徴とする船舶搭載用航行支援システム。
【請求項3】
請求項1または請求項2に記載の船舶搭載用航行支援システムにおいて、
前記判定部は、
他船舶の位置と物標の位置との比較、他船舶の移動方位と物標の移動方位との比較、および他船舶の速さと物標の速さとの比較のうち、少なくともいずれかに基づく判定を行うことを特徴とする船舶搭載用航行支援システム。
【請求項1】
他船舶から送信された情報に基づいて他船舶情報を取得する船舶識別装置と、
物標の検出を行う船舶レーダ装置と、
を備える船舶搭載用航行支援システムにおいて、
前記船舶識別装置および前記船舶レーダ装置に共有される表示装置と、
前記他船舶情報が示す他船舶と、前記船舶レーダ装置が検出した物標と、が同一物体であるか否かを判定する判定部と、
前記判定部が同一物体である旨の判定をしたときに、当該判定対象となった他船舶または物標のいずれか一方を前記表示装置に表示させる表示制御部と、
を備え、
前記判定部は、
他船舶の大きさと物標の大きさとの比較に基づく判定を行うことを特徴とする船舶搭載用航行支援システム。
【請求項2】
他船舶から送信された情報に基づいて他船舶情報を取得する船舶識別装置と、
物標の検出を行う船舶レーダ装置と、
を備える船舶搭載用航行支援システムにおいて、
前記船舶識別装置および前記船舶レーダ装置に共有される表示装置と、
前記他船舶情報が示す他船舶と、前記船舶レーダ装置が検出した物標と、が同一物体であるか否かを判定する判定部と、
前記判定部が同一物体である旨の判定をしたときに、当該判定対象となった他船舶若しくは物標のいずれか一方を前記表示装置に表示させる第1表示モード、または、当該判定対象となった他船舶および物標の両方を前記表示装置に表示させる第2表示モードのいずれかの表示モードで表示する表示制御部と、
を備え、
前記判定部は、
他船舶の大きさと物標の大きさとの比較に基づく判定を行うことを特徴とする船舶搭載用航行支援システム。
【請求項3】
請求項1または請求項2に記載の船舶搭載用航行支援システムにおいて、
前記判定部は、
他船舶の位置と物標の位置との比較、他船舶の移動方位と物標の移動方位との比較、および他船舶の速さと物標の速さとの比較のうち、少なくともいずれかに基づく判定を行うことを特徴とする船舶搭載用航行支援システム。
【図1】


【図2A】
【図2B】
【図3】
【図4】
【図5】
【図2A】
【図2B】
【図3】
【図4】
【図5】
【公開番号】特開2010−181985(P2010−181985A)
【公開日】平成22年8月19日(2010.8.19)
【国際特許分類】
【出願番号】特願2009−23231(P2009−23231)
【出願日】平成21年2月4日(2009.2.4)
【出願人】(000004330)日本無線株式会社 (1,186)
【Fターム(参考)】
【公開日】平成22年8月19日(2010.8.19)
【国際特許分類】
【出願日】平成21年2月4日(2009.2.4)
【出願人】(000004330)日本無線株式会社 (1,186)
【Fターム(参考)】
[ Back to top ]