
船舶操船装置

【課題】船体の船型・大きさに関わらず斜航操作時に起こる意図せぬ回転を補正し、船体を意図する方向へ操舵することができる船舶操船装置を提供する。
【解決手段】船舶操船装置において、船体の迎角を検出するための迎角センサ36と、船体の船速を検出するための船速センサ37と、船体の迎角と船体の船速と補正値との関係を記憶した記憶手段33と、補正値決定手段としての演算手段32と、を備え、船体を斜航させた状態において、船体が回頭しないようにジョイスティック21を操作した操作量を、演算手段32により決定して補正値とする。
【解決手段】船舶操船装置において、船体の迎角を検出するための迎角センサ36と、船体の船速を検出するための船速センサ37と、船体の迎角と船体の船速と補正値との関係を記憶した記憶手段33と、補正値決定手段としての演算手段32と、を備え、船体を斜航させた状態において、船体が回頭しないようにジョイスティック21を操作した操作量を、演算手段32により決定して補正値とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、船舶操船装置の技術に関する。
【背景技術】
【0002】
従来より、船体内部に左右一対のエンジンを配置し、船体外部に配置された左右一対のアウトドライブ装置へ動力を伝達する船内外機(インボートエンジン・アウトボートドライブ)を有する船舶が知られている。アウトドライブ装置は、スクリュープロペラを回転することによって船体を推進させる推進装置であり、船体の進行方向に対して回動することによって該船体を旋回させる舵装置でもある。
【0003】
このようなアウトドライブ装置は、該アウトドライブ装置に設けられた操舵用油圧アクチュエータによって左右方向に回動される(例えば特許文献1参照。)。そして、アウトドライブ装置の回動角度、即ち、舵角度は、このアウトドライブ装置を構成するリンク機構に取り付けられた角度検出センサ等の検出結果に基づいて把握される。
また、船舶は船舶の進行方向を設定する操作手段を有する。船舶は、操作手段で設定した方向に進行するように制御装置によって制御される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平1−285486号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、操作手段を操作して船体を斜航させるとき、船体の圧力中心が船体の重心と一致しないため、船体には重心とずれた位置に揚力が発生する。これにより、船体が意図せず回転(ヨーイング・回頭)してしまう。この影響は、船体の船型・大きさ・機器の搭載位置等により異なるために、船体の意図せぬ回転を打ち消すための適切な補正値を一意的に決めることができなかった。そのため、個々の船舶について、船体の意図せぬ回転を打ち消すための適切な補正値を算出する必要があった。
【0006】
本発明はかかる課題に鑑み、船体の船型・大きさに関わらず斜航操作時に起こる意図せぬ回転を補正し、船体を意図する方向へ操舵することができる船舶操船装置を提供することを目的としている。
【課題を解決するための手段】
【0007】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段を説明する。
【0008】
即ち、請求項1においては、左右一対のエンジンと、前記左右一対のエンジンの回転数をそれぞれ独立して変更する回転数変更アクチュエータと、前記左右一対のエンジンにそれぞれ接続されて、スクリュープロペラを回転させることによって船体を推進させる左右一対のアウトドライブ装置と、前記エンジンとスクリュープロペラとの間に配設される前後進切換クラッチと、前記左右一対のアウトドライブ装置をそれぞれ独立して左右方向に回動させる左右一対の操舵用アクチュエータと、船舶の進行方向を設定する操作手段と、前記操作手段の操作量を検出する操作量検出手段と、前記操作手段で設定した方向に進行するように、前記回転数変更アクチュエータと前後進切換クラッチと操舵用アクチュエータとを制御するための制御装置と、を備える船舶操船装置において、前記船体の迎角を検出するための迎角検出手段と、前記船体の船速を検出するための船速検出手段と、前記船体の迎角と船体の船速と補正値との関係を記憶した記憶手段と、補正値決定手段と、を備え、前記船体を斜航させた状態において、船体が回頭しないように操作手段を操作した操作量に基づいて前記補正値決定手段により補正値を決定するものである。
【0009】
請求項2においては、左右一対のエンジンと、前記左右一対のエンジンの回転数をそれぞれ独立して変更する回転数変更アクチュエータと、前記左右一対のエンジンにそれぞれ接続されて、スクリュープロペラを回転させることによって船体を推進させる左右一対のアウトドライブ装置と、前記エンジンとスクリュープロペラとの間に配設される前後進切換クラッチと、前記左右一対のアウトドライブ装置をそれぞれ独立して左右方向に回動させる左右一対の操舵用アクチュエータと、船舶の進行方向を設定する操作手段と、前記操作手段の操作量を検出する操作量検出手段と、前記操作手段で設定した方向に進行するように、前記回転数変更アクチュエータと前後進切換クラッチと操舵用アクチュエータとを制御するための制御装置と、を備える船舶操船装置において、前記船体の迎角を検出するための迎角検出手段と、前記アウトドライブ装置の推進力演算手段と、前記船体の迎角と船体の推進力と補正値との関係を記憶した記憶手段と、補正値決定手段と、を備え、船体を斜航させた状態において、船体が回頭しないように操作手段を操作した操作量に基づいて、前記補正値決定手段により補正値を決定するものである。
【0010】
請求項3においては、左右一対のエンジンと、前記左右一対のエンジンの回転数をそれぞれ独立して変更する回転数変更アクチュエータと、前記左右一対のエンジンにそれぞれ接続されて、スクリュープロペラを回転させることによって船体を推進させる左右一対のアウトドライブ装置と、前記エンジンとスクリュープロペラとの間に配設される前後進切換クラッチと、前記左右一対のアウトドライブ装置をそれぞれ独立して左右方向に回動させる左右一対の操舵用アクチュエータと、船舶の進行方向を設定する操作手段と、前記操作手段の操作量を検出する操作量検出手段と、前記操作手段で設定した方向に進行するように、前記回転数変更アクチュエータと前後進切換クラッチと操舵用アクチュエータとを制御するための制御装置と、を備える船舶操船装置において、前記アウトドライブ装置の回転数検出手段と、前記アウトドライブ装置の左右回動角度検出手段と、前記アウトドライブ装置の回転数と左右回動角度から推進力ベクトルを演算する推進ベクトル演算手段と、前記推進力ベクトルのノルムから得られる船体の推進力と前記推進力ベクトルの方向から得られる船体の迎角と補正値との関係を記憶した記憶手段と、補正値決定手段と、を備え、船体を斜航させた状態において、船体が回頭しないように操作手段を操作した操作量に基づいて、前記補正値決定手段により補正値を決定するものである。
【発明の効果】
【0011】
本発明の効果として、以下に示すような効果を奏する。
【0012】
請求項1から請求項3に記載の発明によれば、船体の船型や大きさに関わらず、簡易な方法で斜航操作時に起こる意図せぬ回転を補正するための補正値を決定し、船体を意図する方向へ操舵することができる。
【図面の簡単な説明】
【0013】
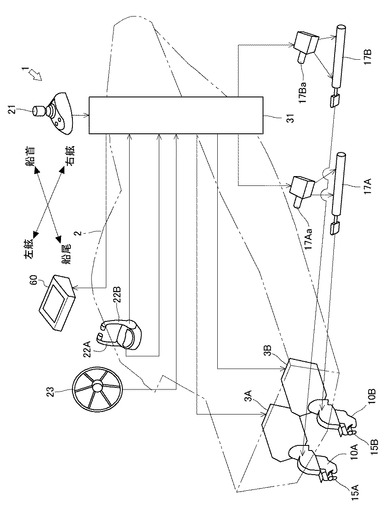
【図1】本発明の一実施形態に係る船舶を示す図。
【図2】本発明の一実施形態に係るアウトドライブ装置を示す左側面一部断面図。
【図3】本発明の一実施形態に係るアウトドライブ装置を示す右側面一部断面図。
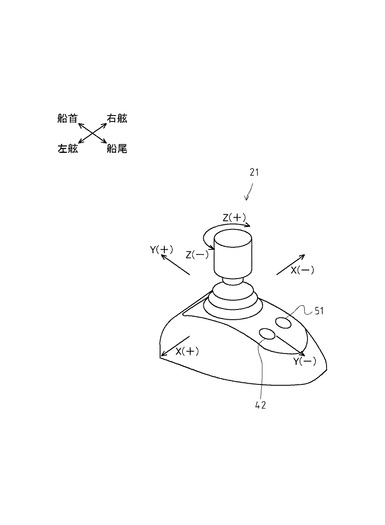
【図4】操作装置を示す図。
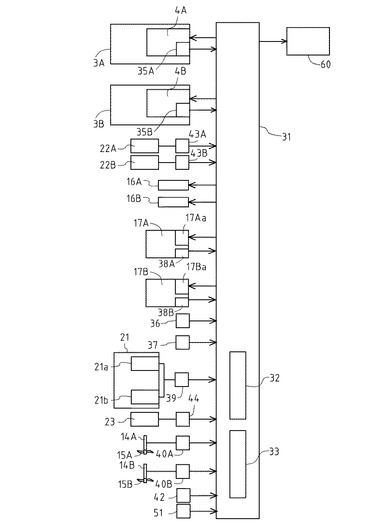
【図5】制御装置を示すブロック図。
【図6】(A)船舶を斜航させた場合の船体にかかる力を示す図(B)操作装置によって回頭モーメントを発生させた場合の船体にかかる力を示す図。
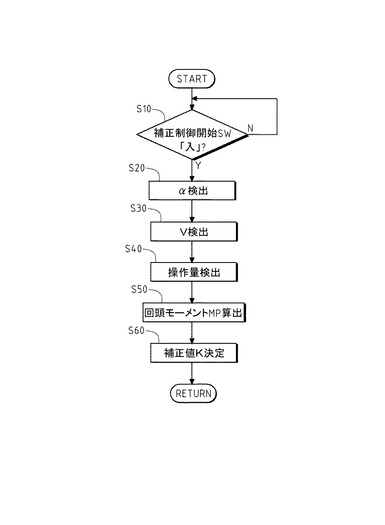
【図7】補正値決定に関する制御を示すフローチャート図。
【図8】別の実施形態に係る補正値決定に関する制御を示すフローチャート図。
【図9】別の実施形態に係る補正値決定に関する制御を示すフローチャート図。
【図10】横移動の際の基準値決定に関する制御を示すフローチャート図。
【図11】(A)旋回状態における船舶の挙動を示す図。(B)旋回状態から横移動状態になったときの船舶の挙動を示す図。
【図12】(A)斜航状態における船舶の挙動を示す図。(B)斜航状態から横移動状態になったときの船舶の挙動を示す図。
【発明を実施するための形態】
【0014】
まず、本発明の一実施形態に係る船舶操船装置について説明する。
船舶操船装置1は、図1、図2及び図3に示すように、左右一対のエンジン3A・3Bと、左右一対のエンジン3A・3Bのエンジン回転数NA・NBをそれぞれ独立して変更する回転数変更アクチュエータ4A・4Bと、左右一対のエンジン3A・3Bにそれぞれ接続されて、スクリュープロペラ15A・15Bを回転させることによって船体2を推進させる左右一対のアウトドライブ装置10A・10Bと、エンジン3A・3Bとスクリュープロペラ15A・15Bとの間に配設される前後進切換クラッチ16A・16Bと、左右一対のアウトドライブ装置10A・10Bをそれぞれ独立して左右方向に回動させる左右一対の操舵用油圧アクチュエータ17A・17Bと、油圧アクチュエータ17A・17B内の油圧を調整するための電磁弁17Aa・17Baと、船舶の進行方向を設定する操作手段としてのジョイスティック21、アクセルレバー22A・22B、及び操作ハンドル23、ジョイスティック21の操作量を検出する操作量検出手段としての操作量検出センサ39(図5参照)と、アクセルレバー22A・22Bの操作量を検出する操作量検出手段としての操作量検出センサ43A・43B(図5参照)と、操作ハンドル23の操作量を検出する操作量検出手段としての操作量検出センサ44(図5参照)と、ジョイスティック21、アクセルレバー22A・22B、及び操作ハンドル23、で設定した方向に進行するように、回転数変更アクチュエータ4A・4Bと前後進切換クラッチ16A・16Bと操舵用油圧アクチュエータ17A・17Bと、電磁弁17Aa・17Baとを制御するための制御装置31(図5参照)と、を備える。
【0015】
エンジン3A・3Bは、船体2後部に左右一対で配置されており、船外に配置されたアウトドライブ装置10A・10Bと接続されている。エンジン3A・3Bは、回転動力を出力するための出力軸41A・41Bを有する。
回転数変更アクチュエータ4A・4Bは、エンジン回転数を制御する手段であり、燃料噴射装置の燃料噴射量等を変更してエンジン3A・3Bのエンジン回転数を制御可能としている。
【0016】
アウトドライブ装置10A・10Bは、スクリュープロペラ15A・15Bを回転させることによって船体2を推進させる推進装置であり、船体2後方外部に左右一対で設けられている。左右一対のアウトドライブ装置10A・10Bはそれぞれ左右一対のエンジン3A・3Bと接続されている。また、アウトドライブ装置10A・10Bは、船体2の進行方向に対して回動することによって船体2を旋回させる舵装置でもある。アウトドライブ装置10A・10Bは、主に入力軸11A・11Bと、前後進切換クラッチ16A・16Bと、駆動軸13A・13Bと、最終出力軸14A・14Bと、スクリュープロペラ15A・15Bと、から構成される。
【0017】
入力軸11A・11Bは、回転動力の伝達を行うものである。詳細には、入力軸11A・11Bは、エンジン3A・3Bの出力軸41A・41Bからユニバーサルジョイント5A・5Bを介して伝達されたエンジン3A・3Bの回転動力を前後進切換クラッチ16A・16Bに伝達する回転軸である。入力軸11A・11Bの一端部は、エンジン3A・3Bの出力軸41A・41Bに取り付けられたユニバーサルジョイント5A・5Bと連結され、その他端部は、前後進切換クラッチ16A・16Bと連結される。
【0018】
前後進切換クラッチ16A・16Bは、エンジン3A・3Bとスクリュープロペラ15A・15Bとの間に配置されており、回転動力の回転方向を切り換えるものである。詳細には、前後進切換クラッチ16A・16Bは、入力軸11A・11B等を介して伝達されたエンジン3A・3Bの回転動力を正回転方向又は逆回転方向に切換可能とする回転方向切換装置である。前後進切換クラッチ16A・16Bは、ディスクプレートを備えたインナードラムと連結された正回転用ベベルギア、ならびに、逆回転用ベベルギアを有し、入力軸11A・11Bに連結されたアウタードラムのプレッシャープレートをいずれのディスクプレートに押し付けるかによって回転方向の切り換えが行なわれる。
【0019】
駆動軸13A・13Bは、回転動力の伝達を行なうものである。詳細には、駆動軸13A・13Bは、前後進切換クラッチ16A・16B等を介して伝達されたエンジン3A・3Bの回転動力を最終出力軸14A・14Bに伝達する回転軸である。駆動軸13A・13Bの一端部に設けられたベベルギアは、前後進切換クラッチ16A・16Bに設けられた正回転用ベベルギア、ならびに、逆回転用ベベルギアと歯合され、その他端部に設けられたベベルギアは、最終出力軸14A・14Bのベベルギアと歯合される。
【0020】
最終出力軸14A・14Bは、回転動力の伝達を行うものである。詳細には、最終出力軸14A・14Bは、駆動軸13A・13B等を介して伝達されたエンジン3A・3Bの回転動力をスクリュープロペラ15A・15Bに伝達する回転軸である。最終出力軸14A・14Bの一端部に設けられたベベルギアは、上述したように駆動軸13A・13Bのベベルギアと歯合され、その他端部には、スクリュープロペラ15A・15Bが取り付けられている。
【0021】
スクリュープロペラ15A・15Bは、回転することによって推進力を発生させるものである。詳細には、スクリュープロペラ15A・15Bは、最終出力軸14A・14B等を介して伝達されたエンジン3A・3Bの回転動力によって駆動され、回転軸周りに配置された複数枚のブレードが周囲の水をかくことによって推進力を発生させる。
【0022】
操舵用油圧アクチュエータ17A・17Bは、アウトドライブ装置10A・10Bの操舵アーム18A・18Bを駆動してアウトドライブ装置10A・10Bを回動させる油圧装置である。操舵用油圧アクチュエータ17A・17Bには、油圧を調整するための電磁弁17Aa・17Baが設けられており、電磁弁17Aa・17Baは、制御装置31に接続されている。
操舵用油圧アクチュエータ17A・17Bは、いわゆる片ロッド型の油圧アクチュエータとされるが、両ロッド型であっても良い。
【0023】
操作手段としてのジョイスティック21は、船舶の進行方向を決定する装置であり、船体2の操縦席付近に設けられている。ジョイスティック21の平面操作面が斜航成分決定部21aであり、ねじり操作面が回頭成分決定部21bである。
ジョイスティック21は、図4に示すX−Y平面と平行な操作面内を自在に動けるものとし、操作面内の中心を中立原点とする。操作面内の前後左右方向は、進行方向と対応し、ジョイスティック21の傾斜量が目標船速と対応する。ジョイスティック21の傾斜量が増加するにつれて、目標船速は増加する。
また、ジョイスティック21はねじり操作面が設けられており、平面操作面から略垂直に延びるZ軸を旋回軸としてねじることにより、回頭速度を変更させることができる。ジョイスティック21のねじり量が目標回頭速度と対応する。また、ジョイスティック21の一定ねじり角位置において左右の最大目標回頭速度を設定する。
【0024】
操作手段としてのアクセルレバー22A・22Bは、船舶の目標船速を決定する装置であり、船体2の操縦席付近に設けられている。アクセルレバー22A・22Bは、左右のエンジン3A・3Bにそれぞれ対応するように二つ設けられており、一方のアクセルレバー22Aが操作されることにより、エンジン3Aの回転数が変更されるとともに、他方のアクセルレバー22Bが操作されることにより、エンジン3Bの回転数が変更される。
【0025】
操作手段としての操作ハンドル23は、船舶の進行方向を決定する装置であり、船体2の操縦席付近に設けられている。操作ハンドル23の回動量が増加するにつれて進行方向が大きく変化する。
【0026】
補正制御開始スイッチ42(図5参照)は、船体2の回頭動作の補正制御を開始するスイッチである。
補正制御開始スイッチ42は、ジョイスティック21の近傍に設けられており、制御装置31と接続されている。
【0027】
横移動制御開始スイッチ51(図5参照)は、船体2の横移動の基準値決定制御を開始するスイッチである。横移動制御開始スイッチ51は、ジョイスティック21の近傍に設けられており、制御装置31と接続されている。
【0028】
表示手段としての表示モニタ60は、船体2の回頭動作の補正制御及び船体2の横移動の基準値決定制御の完了を表示する装置である。表示モニタ60は、船体2の操縦席付近に設けられている。
【0029】
次に、各種検出手段について、図5を用いて説明する。
回転数検出手段としての回転数検出センサ35A・35Bは、エンジン3A・3Bのエンジン回転数NA・NBを検出するための手段であり、エンジン3A・3Bに設けられている。
迎角検出手段としての迎角センサ36は、船体2の迎角αを検出するための手段である。迎角とは、水中の船体が、流れに対してどれだけ傾いているかという角度を表すものである。
船速検出手段としての船速センサ37は、船速Vを検出するための手段であり、例えば、電磁ログやドップラーソナー、GPSなどである。
左右回動角度検出手段としての左右回動角度検出センサ38A・38Bは、アウトドライブ装置10A・10Bの左右の回動角度θA、θBを検出するための手段である。左右回動角度検出センサ38A・38Bは、操舵用油圧アクチュエータ17A・17B近傍に設けられており、操舵用油圧アクチュエータ17A・17Bの駆動量に基づいて、アウトドライブ装置10A・10Bの左右の回動角度θA、θBを検出する。
操作量検出手段としての操作量検出センサ39は、ジョイスティック21の平面操作面での操作量及びねじり操作面での操作量を検出するセンサである。操作量検出センサ39は、ジョイスティック21の傾倒角度及び傾倒方向を検出する。また、操作量検出センサ39は、ジョイスティック21の旋回軸を中心としたねじり量を検出する。
操作量検出手段としての操作量検出センサ43A・43Bは、アクセルレバー22A・22Bの操作量を検出するセンサである。操作量検出センサ43A・43Bは、アクセルレバー22A・22Bの傾倒角度を検出する。
操作量検出手段としての操作量検出センサ44は、操作ハンドル23の操作量を検出するセンサである。操作量検出センサ44は、操作ハンドル23の回転量を検出する。
アウトドライブ装置10A・10Bの回転数検出手段としてのアウトドライブ装置用回転数検出センサ40A・40Bは、アウトドライブ装置10A・10Bのスクリュープロペラ15A・15Bの回転数を検出するセンサであり、最終出力軸14A・14B中途部に設けられている。アウトドライブ装置用回転数検出センサ40A・40Bはアウトドライブ装置回転数NDA、NDBを検出する。
【0030】
制御装置31は、ジョイスティック21で設定した方向に船舶が進行するように回転数変更アクチュエータ4A・4Bと前後進切換クラッチ16A・16Bと操舵用油圧アクチュエータ17A・17Bとを制御するための装置である。制御装置31は、回転数変更アクチュエータ4A・4B、前後進切換クラッチ16A・16B、操舵用油圧アクチュエータ17A・17B、電磁弁17Aa・17Ba、ジョイスティック21、アクセルレバー22A・22B、操作ハンドル23、回転数検出センサ35A・35B、迎角センサ36、船速センサ37、左右回動角度検出センサ38A・38B、操作量検出センサ39、操作量検出センサ43A・43B、操作量検出センサ44及びアウトドライブ装置用回転数検出センサ40A・40Bとそれぞれ接続される。制御装置31は、CPU(中央演算処理装置)からなる演算手段32や、ROM、RAM、HDD等の記憶手段33から構成されている。
演算手段32は、操船制御に関わる様々な演算を行う。
記憶手段33は、船体2の迎角αと船体2の船速Vと補正値Kとの関係を予め記憶している。
ここで、船体2の迎角αと船体2の船速Vと補正値Kとの関係はKを求める下式で表される。
K=MP/V2/C(α)
C(α)はモーメント係数であり、αの関数である。
【0031】
次に、制御装置31による、補正値K決定に関する制御について説明する。制御装置31の演算手段32は補正値決定手段として制御を実行する。
【0032】
まず、補正値Kの決定に関する制御に入るまでのオペレータの手順について説明する。
オペレータは、ジョイスティック21を操作することにより、船舶を斜航させる。斜航とは、船舶を一定の方向へ進行させることであり、前後左右方向への進行も含まれる。例えば図6(A)に示すように矢印A方向に船舶を斜航させた状態では、その進行方向及び進行速度(船速)に応じて船体2の圧力中心Pに対し揚力Lが矢印B方向に発生する。揚力Lは、船舶斜航時の船体2にかかる圧力中心Pが、船体2の重心Gと異なる位置にあるため発生する力である。揚力Lによって船体2の重心Gを中心とする回頭モーメントMが発生する。言い換えれば、船体2は揚力Lによって重心Gを中心として水平方向に回転(ヨーイング)する。
【0033】
次に、図6(B)に示すように、揚力Lによって発生する回頭モーメントMに対して釣り合いが取れるような回頭モーメントMPを発生させるために、オペレータはジョイスティック21をねじり操作する。
次に、ねじり操作によって船体2が回頭しない状態になった後、補正制御開始スイッチ42を入状態にする。補正制御開始スイッチ42が入状態になった場合、補正値決定に関する制御が開始される。
【0034】
次に、補正値Kの決定に関する制御のフローについて、図7を用いて、説明する。
制御装置31は、補正制御開始スイッチ42が入状態になったか否かを判断し(ステップS10)、入状態になっていない場合には再びステップS10を行う。
ステップS10において補正制御開始スイッチ42が入状態になった場合、この時点での迎角αを迎角センサ36で検出し(ステップS20)、船速Vを船速センサ37で検出する(ステップS30)。迎角α及び船速Vは制御装置31の記憶手段33に格納される。
次に、ジョイスティック21のねじり量を操作量検出センサ39によって検出し(ステップS40)、ねじり量に基づく回頭モーメントMPを制御装置31の演算手段32によって演算する(ステップS50)。回頭モーメントMPは記憶手段33に格納される。
制御装置31の演算手段32は、迎角α、船速V及び回頭モーメントMPに基づいて、補正値Kを決定する(ステップS60)。
ここでKは、
K=MP/V2/C(α)
C(α)はモーメント係数であり、αの関数である。
【0035】
ステップS60において、補正値Kが決定された後、表示モニタ60に補正値Kが決定されたことを示す表示がなされる。この表示がなされた時点で、オペレータが補正制御開始スイッチ42を押すことにより、補正値Kが記憶手段33に記憶される。補正値Kが記憶手段33に記憶されたことをもって、船体2の回頭動作の補正、すなわちキャリブレーションが終了する。
【0036】
このような操作と演算を行うことにより、船体2及び船舶の大きさに関わらず簡易な方法で補正値Kを算出することが可能となり、船体2を斜航させる場合に、回転数変更アクチュエータ4A・4B及び操舵用油圧アクチュエータ17A・17Bの駆動信号値が補正値Kにより補正され、オペレータが操作した目標とする方向に航行させることができる。
【0037】
<第二実施形態>
また、船速センサ37によって検出される船速Vの代わりに、アウトドライブ装置10A・10Bの推進力(単位N)に基づいて、船速Vによって生じる動圧1/2ρV2を推定し、動圧1/2ρV2から船速Vを算出する方法について説明する。ここで、ρとは水の密度である。
【0038】
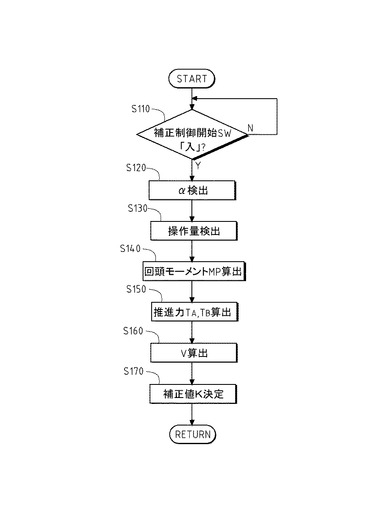
補正値Kの決定に関する制御のフローについて、図8を用いて、説明する。
制御装置31は、補正制御開始スイッチ42が入状態になったか否かを判断し(ステップS110)、入状態になっていない場合には再びステップS110を行う。
ステップS110において、補正制御開始スイッチ42が入状態になった場合、この時点での迎角αを迎角センサ36で検出する(ステップS120)。迎角αは制御装置31の記憶手段33に格納される。
次に、ジョイスティック21のねじり量を操作量検出センサ39によって検出し(ステップS130)、ねじり量に基づく回頭モーメントMPを制御装置31の演算手段32によって演算する(ステップS140)。回頭モーメントMPは記憶手段33に格納される。
次に、アウトドライブ装置10A・10Bの推進力TA・TBを制御装置31の演算手段32を用いて算出する(ステップS150)。制御装置31は、操作量検出センサ39により検知された、ジョイスティック21の斜航成分決定部21aの操作量と回頭成分決定部21bの操作量とに基づいて推進力TA・TBを算出する。または、エンジン回転数より推進力TA・TBを算出する。
制御装置31は、演算手段32により算出された推進力TA・TBに基づいて、動圧1/2ρV2を算出し、動圧1/2ρV2から船速Vを算出する(ステップS160)。船速Vは記憶手段33に格納される。
制御装置31の演算手段32は、前記迎角α、船速V及び回頭モーメントMPに基づいて、補正値Kを決定する(ステップS170)。
ここでKは、
K=MP/V2/C(α)
C(α)はモーメント係数であり、αの関数である。
【0039】
ステップS170において、補正値Kが決定された後、表示モニタ60に補正値Kが決定されたことを示す表示がなされる。この表示がなされた時点で、オペレータが補正制御開始スイッチ42を押すことにより、補正値Kが記憶手段33に記憶される。補正値Kが記憶手段33に記憶されたことをもって、船体2の回頭動作の補正に関するキャリブレーションが終了する。
【0040】
このように構成することにより、船体2及び船舶の大きさに関わらず簡易な方法で補正値Kを算出することが可能となる。また、船速Vを直接検出することができなくとも、つまり、船速Vを検出センサを備えることなく、簡易な方法で補正値Kを算出することが可能となり、コスト低減化も図れる。
【0041】
<第三実施形態>
また、船速センサ37によって計測される船速Vの代わりに、推進力ベクトルT´に基づいて補正値Kを算出する方法について説明する。
制御装置31の記憶手段33は、推進力ベクトルTA´・TB´のノルムから得られる船体2の推進力TA・TBと推進力ベクトルTA´・TB´の方向から得られる船体2の迎角αと補正値Kとの関係を予め記憶している。
【0042】
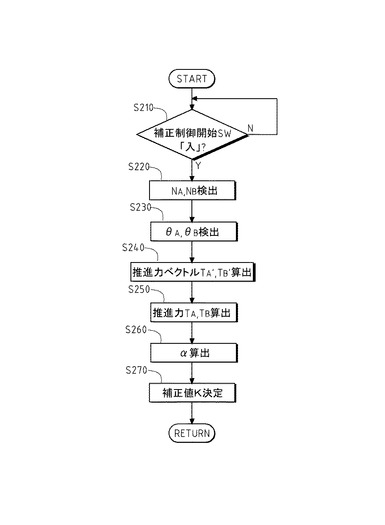
補正値K決定に関する制御のフローについて、図9を用いて、説明する。
制御装置31は、補正制御開始スイッチ42が入状態になったか否かを判断し(ステップS210)、入状態になっていない場合には再びステップS210を行う。
ステップS210において補正制御開始スイッチ42が入状態になった場合、この時点においての左右一対のアウトドライブ装置10A・10Bのアウトドライブ装置回転数NDをアウトドライブ装置用回転数検出センサ40A・40Bによって検出する(ステップS220)。アウトドライブ装置回転数NDは記憶手段33に格納される。次に、左右一対のアウトドライブ装置10A・10Bの左右回動角度θA・θBを左右回動角度検出センサ38A・38Bによって検出する(ステップS230)。左右回動角度θA・θBは記憶手段33に格納される。次に、左右一対のアウトドライブ装置10A・10Bのアウトドライブ装置回転数NDA・NDB及び左右回動角度θA・θBに基づいて推進力ベクトルTA´・TB´を算出する(ステップS240)。推進力ベクトルTA´・TB´は記憶手段33に格納される。
次に、推進力ベクトルTA´・TB´のノルムから船体2の推進力TA・TBを得る(ステップS250)。ここで推進力の単位はエンジン回転数の二乗(単位:min−2)とする。また、推進力ベクトルTA´・TB´の方向から船体2の迎角αを得る(ステップS260)。
次に、制御装置31の演算手段32は、記憶手段33に予め記憶されている船体2の推進力Tと船体2の迎角αと補正値Kとの関係を用いて、ステップS250で得た船体2の推進力T、及びステップS260で得た船体2の迎角αから補正値Kを決定する(ステップS270)。
【0043】
ステップS270において、補正値Kが決定された後、表示モニタ60に補正値Kが決定されたことを示す表示がなされる。この表示がなされた時点で、オペレータが補正制御開始スイッチ42を押すことにより、補正値Kが記憶手段33に記憶される。補正値Kが記憶手段33に記憶されたことをもって、船体2の回頭動作の補正に関するキャリブレーションが終了する。
【0044】
このように構成することにより、船体2及び船舶の大きさに関わらず簡易な方法で補正値Kを算出することが可能となる。また、船速Vを検出することができなくとも簡易な方法で補正値Kを算出することが可能となり、コスト低減化も図れる。
【0045】
以上のように、左右一対のエンジン3A・3Bと、左右一対のエンジン3A・3Bのエンジン回転数Nをそれぞれ独立して変更する回転数変更アクチュエータ4A・4Bと、左右一対のエンジン3A・3Bにそれぞれ接続されて、スクリュープロペラ15A・15Bを回転させることによって船体2を推進させる左右一対のアウトドライブ装置10A・10Bと、エンジン3A・3Bとスクリュープロペラ15A・15Bとの間に配設される前後進切換クラッチ16A・16Bと、左右一対のアウトドライブ装置10A・10Bをそれぞれ独立して左右方向に回動させる左右一対の操舵用油圧アクチュエータ17A・17Bと、船舶の進行方向を設定するジョイスティック21と、ジョイスティック21の操作量を検出する操作量検出センサ39と、前記ジョイスティック21で設定した方向に進行するように、回転数変更アクチュエータ4A・4Bと前後進切換クラッチ16A・16Bと操舵用油圧アクチュエータ17A・17Bとを制御するための制御装置31と、を備える船舶操船装置1において、前記船体2の迎角αを検出するための迎角センサ36と、船体2の船速Vを検出するための船速センサ37と、船体2の迎角αと船体2の船速Vと補正値Kとの関係を記憶した記憶手段33と、補正値決定手段としての演算手段32と、を備え、船体2を斜航させた状態において、船体2が回頭しないようにジョイスティック21を操作した操作量を、演算手段32により決定して補正値Kとするものである。
【0046】
また、左右一対のエンジン3A・3Bと、左右一対のエンジン3A・3Bのエンジン回転数Nをそれぞれ独立して変更する回転数変更アクチュエータ4A・4Bと、左右一対のエンジン3A・3Bにそれぞれ接続されて、スクリュープロペラ15A・15Bを回転させることによって船体2を推進させる左右一対のアウトドライブ装置10A・10Bと、エンジン3A・3Bとスクリュープロペラ15A・15Bとの間に配設される前後進切換クラッチ16A・16Bと、左右一対のアウトドライブ装置10A・10Bをそれぞれ独立して左右方向に回動させる左右一対の操舵用油圧アクチュエータ17A・17Bと、船舶の進行方向を設定するジョイスティック21と、ジョイスティック21の操作量を検出する操作量検出センサ39と、前記ジョイスティック21で設定した方向に進行するように、回転数変更アクチュエータ4A・4Bと前後進切換クラッチ16A・16Bと操舵用油圧アクチュエータ17A・17Bとを制御するための制御装置31と、を備える船舶操船装置1において、船体2の迎角αを検出するための迎角センサ36と、アウトドライブ装置10A・10Bの推進力演算手段として及び補正値決定手段として演算手段32と、船体2の迎角αと船体2の船速Vと補正値との関係を記憶した記憶手段33、を備え、船体2を斜航させた状態において、船体2が回頭しないようにジョイスティック21を操作した操作量に基づいて、演算手段32により補正値Kを決定するものである。
【0047】
また、左右一対のエンジン3A・3Bと、左右一対のエンジン3A・3Bのエンジン回転数Nをそれぞれ独立して変更する回転数変更アクチュエータ4A・4Bと、左右一対のエンジン3A・3Bにそれぞれ接続されて、スクリュープロペラ15A・15Bを回転させることによって船体2を推進させる左右一対のアウトドライブ装置10A・10Bと、エンジン3A・3Bとスクリュープロペラ15A・15Bとの間に配設される前後進切換クラッチ16A・16Bと、左右一対のアウトドライブ装置10A・10Bをそれぞれ独立して左右方向に回動させる左右一対の操舵用油圧アクチュエータ17A・17Bと、船舶の進行方向を設定するジョイスティック21と、ジョイスティック21の操作量を検出する操作量検出センサ39と、前記ジョイスティック21で設定した方向に進行するように、回転数変更アクチュエータ4A・4Bと前後進切換クラッチ16A・16Bと操舵用油圧アクチュエータ17A・17Bとを制御するための制御装置31と、を備える船舶操船装置1において、アウトドライブ装置用回転数検出センサ40A・40Bと、左右回動角度検出センサ38A・38Bと、アウトドライブ装置10A・10Bのアウトドライブ装置回転数NDA・NDBと左右回動角度θA・θBから推進力ベクトルTA´・TB´を演算する推進ベクトル演算手段として、及び補正値決定手段としての演算手段32と、推進力ベクトルTA´・TB´のノルムから得られる船体2の推進力Tと推進力ベクトルTA´・TB´の角度θA・θBから得られる船体2の迎角αと補正値Kとの関係を記憶した記憶手段33と、を備え、船体2を斜航させた状態において、船体2が回頭しないようにジョイスティック21を操作した操作量に基づいて、演算手段32により補正値Kを決定するものである。
【0048】
このように構成することにより、船体2の船型や大きさに関わらず、簡易な方法で斜航操作時に起こる意図せぬ回転を補正するための補正値Kを決定し、船体2を意図する方向へ操舵することができる。
【0049】
[横移動の際の基準値決定に関する制御]
次に、制御装置31による、横移動の際の基準値決定に関する制御について図10を用いて説明する。制御装置31の演算手段32は基準値決定手段として制御を実行する。
【0050】
まず、基準値の決定に関する制御に入るまでのオペレータの手順について説明する。
オペレータは、ジョイスティック21を操作することにより、船舶を横移動させる。例えば、ジョイスティック21を図4のX軸(+)方向に倒すように操作する。
【0051】
ここで、ジョイスティック21をX軸(+)方向に倒すように操作しても、船舶が左舷方向に横移動しない場合、例えば、船舶が旋回したり(図11(A)参照)、船舶が斜航したり(図12(A)参照)した場合は、さらに、ジョイスティック21を操作して、ジョイスティック21の倒し量及び捩り量を変更することにより、船舶が左舷方向に横移動するように調整する。
【0052】
図11及び図12に示すように、左右一対のアウトドライブ装置10A・10Bのうち、左舷側のアウトドライブ装置10Aの推進力の方向は、船尾方向に対して左舷側斜め方向であるとともに、右舷側のアウトドライブ装置10Bの推進力の方向は、船首方向に対して左舷側斜め方向である。つまり、左舷側のアウトドライブ装置10Aの推進力の方向は、後進側であるとともに、右舷側のアウトドライブ装置10Bの推進力の方向は、前進側である。ここで、左舷側のアウトドライブ装置10Aの推進力をTA、右舷側のアウトドライブ装置10Bの推進力をTB、総推進力をTとすると、総推進力Tは、左舷側のアウトドライブ装置10Aの推進力の方向と右舷側のアウトドライブ装置10Bの推進力の方向との交点に作用することになる。なお、総推進力Tとは、左舷側のアウトドライブ装置10Aの推進力と右舷側のアウトドライブ装置10Bの推進力との合力のことをいう。
【0053】
図11(A)に示すように、左舷側のアウトドライブ装置10Aの推進力の方向と右舷側のアウトドライブ装置10Bの推進力の方向との交点が船舶の重心Gに一致していない場合、総推進力Tが船舶の重心Gに作用しない。このため、総推進力Tによるモーメントが船舶22の重心G周りに発生することから、船舶が右舷方向(平面視にて時計回り)に旋回することになる。
【0054】
この場合、ジョイスティック21をZ軸(−)方向に捩り操作して、左舷側のアウトドライブ装置10Aの回動角度θA及び右舷側のアウトドライブ装置10Bの回動角度θBを変更する。なお、船舶が左舷方向(平面視にて反時計回り)に旋回した場合は、ジョイスティック21をZ軸(+)方向に捩り操作する。これにより、図11(B)に示すように、左舷側のアウトドライブ装置10Aの推進力の方向と右舷側のアウトドライブ装置10Bの推進力の方向との交点が船舶の重心Gに一致して、総推進力Tが船舶の重心Gに作用すると、船舶が左舷方向に横移動する。
【0055】
また、図12(A)に示すように、左舷側のアウトドライブ装置10Aの推進力と右舷側のアウトドライブ装置10Bの推進力とが同じでない場合、総推進力Tが船舶を横移動させたい方向に作用しないため、船舶が斜航することになる。例えば、左舷側のアウトドライブ装置10Aの推進力が右舷側のアウトドライブ装置10Bの推進力よりも小さい場合には、船舶が船首方向に対して左舷側斜め方向に航行することになる。なお、スクリュープロペラ15A・15Bでは、その回転数が同じであっても正転している場合と逆転している場合とでは、回転によって発生する推進力が異なる。例えば、同じ回転数であれば正転時の方が逆転時よりも推進力が大きい。
【0056】
この場合、ジョイスティック21をX軸(+)方向の倒し量は同じままY軸(−)方向に傾倒操作して、左舷側のアウトドライブ装置10A(スクリュープロペラ15A)の回転数又は右舷側のアウトドライブ装置10B(プロペラ15B)の回転数を変更する。なお、船舶が船尾方向に対して左舷側斜め方向に航行した場合は、ジョイスティック21をX軸(+)方向の倒し量は同じままY軸(+)方向に傾倒操作する。これにより、図12(B)に示すように、左舷側のアウトドライブ装置10Aの推進力と右舷側のアウトドライブ装置10Bの推進力とが同じになって、総推進力Tが船舶を横移動させたい方向に作用すると、船舶が左舷方向に横移動する。
【0057】
次に、左弦方向に横移動する状態になった後、横移動制御開始スイッチ51を入状態にする。横移動制御開始スイッチ51が入状態になった場合、基準値決定に関する制御が開始される。基準値決定に関する制御について図10を用いて説明する。
【0058】
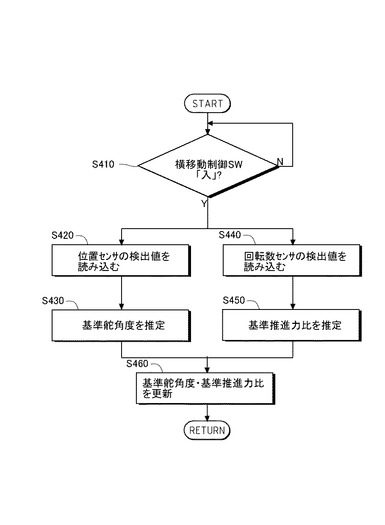
まず、制御装置31は、横移動制御開始スイッチ51が入状態になったか否かを判断し(ステップS410)、入状態になっていない場合には再びステップS410を行う。
【0059】
ステップS410において横移動制御開始スイッチ51が入状態になったと判断された場合には、ステップS420において、制御装置31は、横移動制御開始スイッチ51が入状態となった時点における左舷側の左右回動角度検出センサ38A及び右舷側の左右回動角度検出センサ38Bの検出値を読み込む。そして、制御装置31は、左舷側の左右回動角度検出センサ38Aの検出値に基づいて、左舷側のアウトドライブ装置10Aの回動角度θAを把握するとともに、右舷側の左右回動角度検出センサ38Bの検出値に基づいて、右舷側のアウトドライブ装置10Bの回動角度θBを把握する。
【0060】
ステップS430において、制御装置31は、横移動制御開始スイッチ51が入状態となった時点における基準舵角度(アウトドライブ装置10A・10Bの回動角度)を算出する。例えば、基準舵角度は、左舷側のアウトドライブ装置10Aの回動角度θAと右舷側のアウトドライブ装置10Bの回動角度θBとの平均値である。なお、基準舵角度とは、左舷側のアウトドライブ装置10Aの推進力の方向と右舷側のアウトドライブ装置10Bの推進力の方向との交点が船舶の重心Gに一致するときのアウトドライブ装置10A・10Bの回動角度のことをいう。
【0061】
ステップS440において、制御装置31は、横移動制御開始スイッチ51が入状態となった時点における左舷側のアウトドライブ装置用回転数検出センサ40A及び右舷側のアウトドライブ装置用回転数検出センサ40Bの検出値を読み込む。そして、制御装置31は、左舷側のアウトドライブ装置用回転数検出センサ40Aの検出値に基づいて、左舷側のアウトドライブ装置10Aの回転数NDAを把握するとともに、右舷側のアウトドライブ装置用回転数検出センサ40Bの検出値に基づいて、右舷側のアウトドライブ装置10Bの回転数NDBを把握する。
【0062】
ステップS450において、制御装置31は、横移動制御開始スイッチ51が入状態となった時点における基準推進力比を推定する。例えば、基準推進力比は、後進側となる方のアウトドライブ装置10A(10B)の回転数NDA(NDB)を前進側となる方のアウトドライブ装置10A(10B)の回転数NDA(NDB)で除した値である。本実施形態では、左舷側のアウトドライブ装置10Aの回転数NDAを右舷側のアウトドライブ装置10Bの回転数NDBで除した値である。なお、基準推進力比とは、左舷側のアウトドライブ装置10Aの推進力と右舷側のアウトドライブ装置10Bの推進力とが同じになるときの左舷側のアウトドライブ装置10Aの回転数NDAと右舷側のアウトドライブ装置10Bの回転数NDBとの比のことをいう。また、基準推進力比は、前進側となる方のアウトドライブ装置10A(10B)の回転数NDA(NDB)を後進側となる方のアウトドライブ装置10A(10B)の回転数NDA(NDB)で除した値としてもよい。
【0063】
ステップS430及びS450において、基準舵角度及び基準推進力比が推定された後、表示モニタ60に基準舵角度及び基準推進力比が推定されたことを示す表示がなされる。この表示がなされた時点で、オペレータが横移動制御開始スイッチ51を押すことにより、基準舵角度及び基準推進力比が記憶手段33に記憶される。すなわち、基準舵角度及び基準推進力比が更新される(ステップS460)。基準舵角度及び基準推進力比が記憶手段33に記憶されたことをもって、船体2の横移動の際の基準値決定に関するキャリブレーションが終了する。なお、船舶を右舷方向に横移動させるためのキャリブレーションも同様に行われる。
【0064】
なお、本実施形態に係る制御は、ステップS420、ステップS430、ステップS440、及びステップS450を全て行う制御に限定するものではなく、ステップS420及びステップS430を行い、ステップS440及びステップS450を行わない制御も可能であるし、ステップS440及びステップS450を行い、ステップS420及びステップS430を行わない制御も可能である。
【0065】
以上のように、左右舷方向に回動可能な左右一対のアウトドライブ装置10A・10Bを具備し、アウトドライブ装置10A・10Bの推進力によって航行する船舶の操船方法であって、アウトドライブ装置10A・10Bを作動させる操作手段であるジョイスティック21と、船舶22が左舷方向又は右舷方向に横移動している状態であることを確認したときに操作する確認手段である横移動制御開始スイッチ51と、アウトドライブ装置10A・10B、ジョイスティック21及び横移動制御開始スイッチ51が接続される制御装置31と、を用い、船舶が左舷方向又は右舷方向に横移動するようにジョイスティック21を操作してアウトドライブ装置10A・10Bを作動させ、船舶が左舷方向又は右舷方向に横移動している状態であることを確認したときに横移動制御開始スイッチ51を操作し、横移動制御開始スイッチ51が操作された時点におけるアウトドライブ装置10A・10Bの回動角度(基準舵角度)を制御装置31によって算出する。
【0066】
このような構成により、ジョイスティック21及び横移動制御開始スイッチ51を操作するだけで、船舶が横移動するときの基準舵角度が設定される。これにより、船舶が横移動するように容易に調整することができる。
【0067】
そして、一方のアウトドライブ装置10Aの回転数を検出するアウトドライブ装置用回転数検出センサ40Aと、他方のアウトドライブ装置10Bの回転数を検出するアウトドライブ装置用回転数検出センサ40Bと、アウトドライブ装置用回転数検出センサ40A・40Bが接続される制御装置31と、を用い、横移動制御開始スイッチ51が操作された時点における一方のアウトドライブ装置10A(10B)の回転数と他方のアウトドライブ装置10A(10B)の回転数との比を制御装置31によって算出する。
【0068】
このような構成により、ジョイスティック21及び横移動制御開始スイッチ51を操作するだけで、船舶が横移動するときの基準推進力比が設定される。これにより、船舶が横移動するように容易に調整することができる。
【0069】
なお、本発明に係る操作手段は、本実施形態に係るジョイスティック21に限定されるものではない。例えば、本発明に係る操作手段は、十字方向に傾倒可能なレバーや複数のレバー、ハンドルであってもよい。
【0070】
また、本発明に係る確認手段は、本実施形態に係る横移動制御開始スイッチ51に限定されるものではない。例えば、本発明に係る確認手段は、レバーであってもよい。
【符号の説明】
【0071】
1 船舶操船装置
2 船体
3A・3B エンジン
4A・4B 回転数変更アクチュエータ
10A・10B アウトドライブ装置
15A・15B スクリュープロペラ
16A・16B 前後進切換クラッチ
17A・17B 操舵用油圧アクチュエータ(操舵用アクチュエータ)
21 ジョイスティック(操作手段)
31 制御装置
36 迎角センサ(迎角検出手段)
37 船速センサ(船速検出手段)
38A・38B 左右回動角度検出センサ(左右回動角度検出手段)
39 操作量検出センサ(操作量検出手段)
40A・40B アウトドライブ装置用回転数検出センサ(アウトドライブ装置の回転数検出手段)
NA・NB エンジン回転数
NDA・NDB アウトドライブ装置回転数
θA・θB アウトドライブ装置の回動角度
TA´・TB´ 推進力ベクトル
TA・TB 推進力
α 迎角
V 船速
K 補正値
【技術分野】
【0001】
本発明は、船舶操船装置の技術に関する。
【背景技術】
【0002】
従来より、船体内部に左右一対のエンジンを配置し、船体外部に配置された左右一対のアウトドライブ装置へ動力を伝達する船内外機(インボートエンジン・アウトボートドライブ)を有する船舶が知られている。アウトドライブ装置は、スクリュープロペラを回転することによって船体を推進させる推進装置であり、船体の進行方向に対して回動することによって該船体を旋回させる舵装置でもある。
【0003】
このようなアウトドライブ装置は、該アウトドライブ装置に設けられた操舵用油圧アクチュエータによって左右方向に回動される(例えば特許文献1参照。)。そして、アウトドライブ装置の回動角度、即ち、舵角度は、このアウトドライブ装置を構成するリンク機構に取り付けられた角度検出センサ等の検出結果に基づいて把握される。
また、船舶は船舶の進行方向を設定する操作手段を有する。船舶は、操作手段で設定した方向に進行するように制御装置によって制御される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平1−285486号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、操作手段を操作して船体を斜航させるとき、船体の圧力中心が船体の重心と一致しないため、船体には重心とずれた位置に揚力が発生する。これにより、船体が意図せず回転(ヨーイング・回頭)してしまう。この影響は、船体の船型・大きさ・機器の搭載位置等により異なるために、船体の意図せぬ回転を打ち消すための適切な補正値を一意的に決めることができなかった。そのため、個々の船舶について、船体の意図せぬ回転を打ち消すための適切な補正値を算出する必要があった。
【0006】
本発明はかかる課題に鑑み、船体の船型・大きさに関わらず斜航操作時に起こる意図せぬ回転を補正し、船体を意図する方向へ操舵することができる船舶操船装置を提供することを目的としている。
【課題を解決するための手段】
【0007】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段を説明する。
【0008】
即ち、請求項1においては、左右一対のエンジンと、前記左右一対のエンジンの回転数をそれぞれ独立して変更する回転数変更アクチュエータと、前記左右一対のエンジンにそれぞれ接続されて、スクリュープロペラを回転させることによって船体を推進させる左右一対のアウトドライブ装置と、前記エンジンとスクリュープロペラとの間に配設される前後進切換クラッチと、前記左右一対のアウトドライブ装置をそれぞれ独立して左右方向に回動させる左右一対の操舵用アクチュエータと、船舶の進行方向を設定する操作手段と、前記操作手段の操作量を検出する操作量検出手段と、前記操作手段で設定した方向に進行するように、前記回転数変更アクチュエータと前後進切換クラッチと操舵用アクチュエータとを制御するための制御装置と、を備える船舶操船装置において、前記船体の迎角を検出するための迎角検出手段と、前記船体の船速を検出するための船速検出手段と、前記船体の迎角と船体の船速と補正値との関係を記憶した記憶手段と、補正値決定手段と、を備え、前記船体を斜航させた状態において、船体が回頭しないように操作手段を操作した操作量に基づいて前記補正値決定手段により補正値を決定するものである。
【0009】
請求項2においては、左右一対のエンジンと、前記左右一対のエンジンの回転数をそれぞれ独立して変更する回転数変更アクチュエータと、前記左右一対のエンジンにそれぞれ接続されて、スクリュープロペラを回転させることによって船体を推進させる左右一対のアウトドライブ装置と、前記エンジンとスクリュープロペラとの間に配設される前後進切換クラッチと、前記左右一対のアウトドライブ装置をそれぞれ独立して左右方向に回動させる左右一対の操舵用アクチュエータと、船舶の進行方向を設定する操作手段と、前記操作手段の操作量を検出する操作量検出手段と、前記操作手段で設定した方向に進行するように、前記回転数変更アクチュエータと前後進切換クラッチと操舵用アクチュエータとを制御するための制御装置と、を備える船舶操船装置において、前記船体の迎角を検出するための迎角検出手段と、前記アウトドライブ装置の推進力演算手段と、前記船体の迎角と船体の推進力と補正値との関係を記憶した記憶手段と、補正値決定手段と、を備え、船体を斜航させた状態において、船体が回頭しないように操作手段を操作した操作量に基づいて、前記補正値決定手段により補正値を決定するものである。
【0010】
請求項3においては、左右一対のエンジンと、前記左右一対のエンジンの回転数をそれぞれ独立して変更する回転数変更アクチュエータと、前記左右一対のエンジンにそれぞれ接続されて、スクリュープロペラを回転させることによって船体を推進させる左右一対のアウトドライブ装置と、前記エンジンとスクリュープロペラとの間に配設される前後進切換クラッチと、前記左右一対のアウトドライブ装置をそれぞれ独立して左右方向に回動させる左右一対の操舵用アクチュエータと、船舶の進行方向を設定する操作手段と、前記操作手段の操作量を検出する操作量検出手段と、前記操作手段で設定した方向に進行するように、前記回転数変更アクチュエータと前後進切換クラッチと操舵用アクチュエータとを制御するための制御装置と、を備える船舶操船装置において、前記アウトドライブ装置の回転数検出手段と、前記アウトドライブ装置の左右回動角度検出手段と、前記アウトドライブ装置の回転数と左右回動角度から推進力ベクトルを演算する推進ベクトル演算手段と、前記推進力ベクトルのノルムから得られる船体の推進力と前記推進力ベクトルの方向から得られる船体の迎角と補正値との関係を記憶した記憶手段と、補正値決定手段と、を備え、船体を斜航させた状態において、船体が回頭しないように操作手段を操作した操作量に基づいて、前記補正値決定手段により補正値を決定するものである。
【発明の効果】
【0011】
本発明の効果として、以下に示すような効果を奏する。
【0012】
請求項1から請求項3に記載の発明によれば、船体の船型や大きさに関わらず、簡易な方法で斜航操作時に起こる意図せぬ回転を補正するための補正値を決定し、船体を意図する方向へ操舵することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の一実施形態に係る船舶を示す図。
【図2】本発明の一実施形態に係るアウトドライブ装置を示す左側面一部断面図。
【図3】本発明の一実施形態に係るアウトドライブ装置を示す右側面一部断面図。
【図4】操作装置を示す図。
【図5】制御装置を示すブロック図。
【図6】(A)船舶を斜航させた場合の船体にかかる力を示す図(B)操作装置によって回頭モーメントを発生させた場合の船体にかかる力を示す図。
【図7】補正値決定に関する制御を示すフローチャート図。
【図8】別の実施形態に係る補正値決定に関する制御を示すフローチャート図。
【図9】別の実施形態に係る補正値決定に関する制御を示すフローチャート図。
【図10】横移動の際の基準値決定に関する制御を示すフローチャート図。
【図11】(A)旋回状態における船舶の挙動を示す図。(B)旋回状態から横移動状態になったときの船舶の挙動を示す図。
【図12】(A)斜航状態における船舶の挙動を示す図。(B)斜航状態から横移動状態になったときの船舶の挙動を示す図。
【発明を実施するための形態】
【0014】
まず、本発明の一実施形態に係る船舶操船装置について説明する。
船舶操船装置1は、図1、図2及び図3に示すように、左右一対のエンジン3A・3Bと、左右一対のエンジン3A・3Bのエンジン回転数NA・NBをそれぞれ独立して変更する回転数変更アクチュエータ4A・4Bと、左右一対のエンジン3A・3Bにそれぞれ接続されて、スクリュープロペラ15A・15Bを回転させることによって船体2を推進させる左右一対のアウトドライブ装置10A・10Bと、エンジン3A・3Bとスクリュープロペラ15A・15Bとの間に配設される前後進切換クラッチ16A・16Bと、左右一対のアウトドライブ装置10A・10Bをそれぞれ独立して左右方向に回動させる左右一対の操舵用油圧アクチュエータ17A・17Bと、油圧アクチュエータ17A・17B内の油圧を調整するための電磁弁17Aa・17Baと、船舶の進行方向を設定する操作手段としてのジョイスティック21、アクセルレバー22A・22B、及び操作ハンドル23、ジョイスティック21の操作量を検出する操作量検出手段としての操作量検出センサ39(図5参照)と、アクセルレバー22A・22Bの操作量を検出する操作量検出手段としての操作量検出センサ43A・43B(図5参照)と、操作ハンドル23の操作量を検出する操作量検出手段としての操作量検出センサ44(図5参照)と、ジョイスティック21、アクセルレバー22A・22B、及び操作ハンドル23、で設定した方向に進行するように、回転数変更アクチュエータ4A・4Bと前後進切換クラッチ16A・16Bと操舵用油圧アクチュエータ17A・17Bと、電磁弁17Aa・17Baとを制御するための制御装置31(図5参照)と、を備える。
【0015】
エンジン3A・3Bは、船体2後部に左右一対で配置されており、船外に配置されたアウトドライブ装置10A・10Bと接続されている。エンジン3A・3Bは、回転動力を出力するための出力軸41A・41Bを有する。
回転数変更アクチュエータ4A・4Bは、エンジン回転数を制御する手段であり、燃料噴射装置の燃料噴射量等を変更してエンジン3A・3Bのエンジン回転数を制御可能としている。
【0016】
アウトドライブ装置10A・10Bは、スクリュープロペラ15A・15Bを回転させることによって船体2を推進させる推進装置であり、船体2後方外部に左右一対で設けられている。左右一対のアウトドライブ装置10A・10Bはそれぞれ左右一対のエンジン3A・3Bと接続されている。また、アウトドライブ装置10A・10Bは、船体2の進行方向に対して回動することによって船体2を旋回させる舵装置でもある。アウトドライブ装置10A・10Bは、主に入力軸11A・11Bと、前後進切換クラッチ16A・16Bと、駆動軸13A・13Bと、最終出力軸14A・14Bと、スクリュープロペラ15A・15Bと、から構成される。
【0017】
入力軸11A・11Bは、回転動力の伝達を行うものである。詳細には、入力軸11A・11Bは、エンジン3A・3Bの出力軸41A・41Bからユニバーサルジョイント5A・5Bを介して伝達されたエンジン3A・3Bの回転動力を前後進切換クラッチ16A・16Bに伝達する回転軸である。入力軸11A・11Bの一端部は、エンジン3A・3Bの出力軸41A・41Bに取り付けられたユニバーサルジョイント5A・5Bと連結され、その他端部は、前後進切換クラッチ16A・16Bと連結される。
【0018】
前後進切換クラッチ16A・16Bは、エンジン3A・3Bとスクリュープロペラ15A・15Bとの間に配置されており、回転動力の回転方向を切り換えるものである。詳細には、前後進切換クラッチ16A・16Bは、入力軸11A・11B等を介して伝達されたエンジン3A・3Bの回転動力を正回転方向又は逆回転方向に切換可能とする回転方向切換装置である。前後進切換クラッチ16A・16Bは、ディスクプレートを備えたインナードラムと連結された正回転用ベベルギア、ならびに、逆回転用ベベルギアを有し、入力軸11A・11Bに連結されたアウタードラムのプレッシャープレートをいずれのディスクプレートに押し付けるかによって回転方向の切り換えが行なわれる。
【0019】
駆動軸13A・13Bは、回転動力の伝達を行なうものである。詳細には、駆動軸13A・13Bは、前後進切換クラッチ16A・16B等を介して伝達されたエンジン3A・3Bの回転動力を最終出力軸14A・14Bに伝達する回転軸である。駆動軸13A・13Bの一端部に設けられたベベルギアは、前後進切換クラッチ16A・16Bに設けられた正回転用ベベルギア、ならびに、逆回転用ベベルギアと歯合され、その他端部に設けられたベベルギアは、最終出力軸14A・14Bのベベルギアと歯合される。
【0020】
最終出力軸14A・14Bは、回転動力の伝達を行うものである。詳細には、最終出力軸14A・14Bは、駆動軸13A・13B等を介して伝達されたエンジン3A・3Bの回転動力をスクリュープロペラ15A・15Bに伝達する回転軸である。最終出力軸14A・14Bの一端部に設けられたベベルギアは、上述したように駆動軸13A・13Bのベベルギアと歯合され、その他端部には、スクリュープロペラ15A・15Bが取り付けられている。
【0021】
スクリュープロペラ15A・15Bは、回転することによって推進力を発生させるものである。詳細には、スクリュープロペラ15A・15Bは、最終出力軸14A・14B等を介して伝達されたエンジン3A・3Bの回転動力によって駆動され、回転軸周りに配置された複数枚のブレードが周囲の水をかくことによって推進力を発生させる。
【0022】
操舵用油圧アクチュエータ17A・17Bは、アウトドライブ装置10A・10Bの操舵アーム18A・18Bを駆動してアウトドライブ装置10A・10Bを回動させる油圧装置である。操舵用油圧アクチュエータ17A・17Bには、油圧を調整するための電磁弁17Aa・17Baが設けられており、電磁弁17Aa・17Baは、制御装置31に接続されている。
操舵用油圧アクチュエータ17A・17Bは、いわゆる片ロッド型の油圧アクチュエータとされるが、両ロッド型であっても良い。
【0023】
操作手段としてのジョイスティック21は、船舶の進行方向を決定する装置であり、船体2の操縦席付近に設けられている。ジョイスティック21の平面操作面が斜航成分決定部21aであり、ねじり操作面が回頭成分決定部21bである。
ジョイスティック21は、図4に示すX−Y平面と平行な操作面内を自在に動けるものとし、操作面内の中心を中立原点とする。操作面内の前後左右方向は、進行方向と対応し、ジョイスティック21の傾斜量が目標船速と対応する。ジョイスティック21の傾斜量が増加するにつれて、目標船速は増加する。
また、ジョイスティック21はねじり操作面が設けられており、平面操作面から略垂直に延びるZ軸を旋回軸としてねじることにより、回頭速度を変更させることができる。ジョイスティック21のねじり量が目標回頭速度と対応する。また、ジョイスティック21の一定ねじり角位置において左右の最大目標回頭速度を設定する。
【0024】
操作手段としてのアクセルレバー22A・22Bは、船舶の目標船速を決定する装置であり、船体2の操縦席付近に設けられている。アクセルレバー22A・22Bは、左右のエンジン3A・3Bにそれぞれ対応するように二つ設けられており、一方のアクセルレバー22Aが操作されることにより、エンジン3Aの回転数が変更されるとともに、他方のアクセルレバー22Bが操作されることにより、エンジン3Bの回転数が変更される。
【0025】
操作手段としての操作ハンドル23は、船舶の進行方向を決定する装置であり、船体2の操縦席付近に設けられている。操作ハンドル23の回動量が増加するにつれて進行方向が大きく変化する。
【0026】
補正制御開始スイッチ42(図5参照)は、船体2の回頭動作の補正制御を開始するスイッチである。
補正制御開始スイッチ42は、ジョイスティック21の近傍に設けられており、制御装置31と接続されている。
【0027】
横移動制御開始スイッチ51(図5参照)は、船体2の横移動の基準値決定制御を開始するスイッチである。横移動制御開始スイッチ51は、ジョイスティック21の近傍に設けられており、制御装置31と接続されている。
【0028】
表示手段としての表示モニタ60は、船体2の回頭動作の補正制御及び船体2の横移動の基準値決定制御の完了を表示する装置である。表示モニタ60は、船体2の操縦席付近に設けられている。
【0029】
次に、各種検出手段について、図5を用いて説明する。
回転数検出手段としての回転数検出センサ35A・35Bは、エンジン3A・3Bのエンジン回転数NA・NBを検出するための手段であり、エンジン3A・3Bに設けられている。
迎角検出手段としての迎角センサ36は、船体2の迎角αを検出するための手段である。迎角とは、水中の船体が、流れに対してどれだけ傾いているかという角度を表すものである。
船速検出手段としての船速センサ37は、船速Vを検出するための手段であり、例えば、電磁ログやドップラーソナー、GPSなどである。
左右回動角度検出手段としての左右回動角度検出センサ38A・38Bは、アウトドライブ装置10A・10Bの左右の回動角度θA、θBを検出するための手段である。左右回動角度検出センサ38A・38Bは、操舵用油圧アクチュエータ17A・17B近傍に設けられており、操舵用油圧アクチュエータ17A・17Bの駆動量に基づいて、アウトドライブ装置10A・10Bの左右の回動角度θA、θBを検出する。
操作量検出手段としての操作量検出センサ39は、ジョイスティック21の平面操作面での操作量及びねじり操作面での操作量を検出するセンサである。操作量検出センサ39は、ジョイスティック21の傾倒角度及び傾倒方向を検出する。また、操作量検出センサ39は、ジョイスティック21の旋回軸を中心としたねじり量を検出する。
操作量検出手段としての操作量検出センサ43A・43Bは、アクセルレバー22A・22Bの操作量を検出するセンサである。操作量検出センサ43A・43Bは、アクセルレバー22A・22Bの傾倒角度を検出する。
操作量検出手段としての操作量検出センサ44は、操作ハンドル23の操作量を検出するセンサである。操作量検出センサ44は、操作ハンドル23の回転量を検出する。
アウトドライブ装置10A・10Bの回転数検出手段としてのアウトドライブ装置用回転数検出センサ40A・40Bは、アウトドライブ装置10A・10Bのスクリュープロペラ15A・15Bの回転数を検出するセンサであり、最終出力軸14A・14B中途部に設けられている。アウトドライブ装置用回転数検出センサ40A・40Bはアウトドライブ装置回転数NDA、NDBを検出する。
【0030】
制御装置31は、ジョイスティック21で設定した方向に船舶が進行するように回転数変更アクチュエータ4A・4Bと前後進切換クラッチ16A・16Bと操舵用油圧アクチュエータ17A・17Bとを制御するための装置である。制御装置31は、回転数変更アクチュエータ4A・4B、前後進切換クラッチ16A・16B、操舵用油圧アクチュエータ17A・17B、電磁弁17Aa・17Ba、ジョイスティック21、アクセルレバー22A・22B、操作ハンドル23、回転数検出センサ35A・35B、迎角センサ36、船速センサ37、左右回動角度検出センサ38A・38B、操作量検出センサ39、操作量検出センサ43A・43B、操作量検出センサ44及びアウトドライブ装置用回転数検出センサ40A・40Bとそれぞれ接続される。制御装置31は、CPU(中央演算処理装置)からなる演算手段32や、ROM、RAM、HDD等の記憶手段33から構成されている。
演算手段32は、操船制御に関わる様々な演算を行う。
記憶手段33は、船体2の迎角αと船体2の船速Vと補正値Kとの関係を予め記憶している。
ここで、船体2の迎角αと船体2の船速Vと補正値Kとの関係はKを求める下式で表される。
K=MP/V2/C(α)
C(α)はモーメント係数であり、αの関数である。
【0031】
次に、制御装置31による、補正値K決定に関する制御について説明する。制御装置31の演算手段32は補正値決定手段として制御を実行する。
【0032】
まず、補正値Kの決定に関する制御に入るまでのオペレータの手順について説明する。
オペレータは、ジョイスティック21を操作することにより、船舶を斜航させる。斜航とは、船舶を一定の方向へ進行させることであり、前後左右方向への進行も含まれる。例えば図6(A)に示すように矢印A方向に船舶を斜航させた状態では、その進行方向及び進行速度(船速)に応じて船体2の圧力中心Pに対し揚力Lが矢印B方向に発生する。揚力Lは、船舶斜航時の船体2にかかる圧力中心Pが、船体2の重心Gと異なる位置にあるため発生する力である。揚力Lによって船体2の重心Gを中心とする回頭モーメントMが発生する。言い換えれば、船体2は揚力Lによって重心Gを中心として水平方向に回転(ヨーイング)する。
【0033】
次に、図6(B)に示すように、揚力Lによって発生する回頭モーメントMに対して釣り合いが取れるような回頭モーメントMPを発生させるために、オペレータはジョイスティック21をねじり操作する。
次に、ねじり操作によって船体2が回頭しない状態になった後、補正制御開始スイッチ42を入状態にする。補正制御開始スイッチ42が入状態になった場合、補正値決定に関する制御が開始される。
【0034】
次に、補正値Kの決定に関する制御のフローについて、図7を用いて、説明する。
制御装置31は、補正制御開始スイッチ42が入状態になったか否かを判断し(ステップS10)、入状態になっていない場合には再びステップS10を行う。
ステップS10において補正制御開始スイッチ42が入状態になった場合、この時点での迎角αを迎角センサ36で検出し(ステップS20)、船速Vを船速センサ37で検出する(ステップS30)。迎角α及び船速Vは制御装置31の記憶手段33に格納される。
次に、ジョイスティック21のねじり量を操作量検出センサ39によって検出し(ステップS40)、ねじり量に基づく回頭モーメントMPを制御装置31の演算手段32によって演算する(ステップS50)。回頭モーメントMPは記憶手段33に格納される。
制御装置31の演算手段32は、迎角α、船速V及び回頭モーメントMPに基づいて、補正値Kを決定する(ステップS60)。
ここでKは、
K=MP/V2/C(α)
C(α)はモーメント係数であり、αの関数である。
【0035】
ステップS60において、補正値Kが決定された後、表示モニタ60に補正値Kが決定されたことを示す表示がなされる。この表示がなされた時点で、オペレータが補正制御開始スイッチ42を押すことにより、補正値Kが記憶手段33に記憶される。補正値Kが記憶手段33に記憶されたことをもって、船体2の回頭動作の補正、すなわちキャリブレーションが終了する。
【0036】
このような操作と演算を行うことにより、船体2及び船舶の大きさに関わらず簡易な方法で補正値Kを算出することが可能となり、船体2を斜航させる場合に、回転数変更アクチュエータ4A・4B及び操舵用油圧アクチュエータ17A・17Bの駆動信号値が補正値Kにより補正され、オペレータが操作した目標とする方向に航行させることができる。
【0037】
<第二実施形態>
また、船速センサ37によって検出される船速Vの代わりに、アウトドライブ装置10A・10Bの推進力(単位N)に基づいて、船速Vによって生じる動圧1/2ρV2を推定し、動圧1/2ρV2から船速Vを算出する方法について説明する。ここで、ρとは水の密度である。
【0038】
補正値Kの決定に関する制御のフローについて、図8を用いて、説明する。
制御装置31は、補正制御開始スイッチ42が入状態になったか否かを判断し(ステップS110)、入状態になっていない場合には再びステップS110を行う。
ステップS110において、補正制御開始スイッチ42が入状態になった場合、この時点での迎角αを迎角センサ36で検出する(ステップS120)。迎角αは制御装置31の記憶手段33に格納される。
次に、ジョイスティック21のねじり量を操作量検出センサ39によって検出し(ステップS130)、ねじり量に基づく回頭モーメントMPを制御装置31の演算手段32によって演算する(ステップS140)。回頭モーメントMPは記憶手段33に格納される。
次に、アウトドライブ装置10A・10Bの推進力TA・TBを制御装置31の演算手段32を用いて算出する(ステップS150)。制御装置31は、操作量検出センサ39により検知された、ジョイスティック21の斜航成分決定部21aの操作量と回頭成分決定部21bの操作量とに基づいて推進力TA・TBを算出する。または、エンジン回転数より推進力TA・TBを算出する。
制御装置31は、演算手段32により算出された推進力TA・TBに基づいて、動圧1/2ρV2を算出し、動圧1/2ρV2から船速Vを算出する(ステップS160)。船速Vは記憶手段33に格納される。
制御装置31の演算手段32は、前記迎角α、船速V及び回頭モーメントMPに基づいて、補正値Kを決定する(ステップS170)。
ここでKは、
K=MP/V2/C(α)
C(α)はモーメント係数であり、αの関数である。
【0039】
ステップS170において、補正値Kが決定された後、表示モニタ60に補正値Kが決定されたことを示す表示がなされる。この表示がなされた時点で、オペレータが補正制御開始スイッチ42を押すことにより、補正値Kが記憶手段33に記憶される。補正値Kが記憶手段33に記憶されたことをもって、船体2の回頭動作の補正に関するキャリブレーションが終了する。
【0040】
このように構成することにより、船体2及び船舶の大きさに関わらず簡易な方法で補正値Kを算出することが可能となる。また、船速Vを直接検出することができなくとも、つまり、船速Vを検出センサを備えることなく、簡易な方法で補正値Kを算出することが可能となり、コスト低減化も図れる。
【0041】
<第三実施形態>
また、船速センサ37によって計測される船速Vの代わりに、推進力ベクトルT´に基づいて補正値Kを算出する方法について説明する。
制御装置31の記憶手段33は、推進力ベクトルTA´・TB´のノルムから得られる船体2の推進力TA・TBと推進力ベクトルTA´・TB´の方向から得られる船体2の迎角αと補正値Kとの関係を予め記憶している。
【0042】
補正値K決定に関する制御のフローについて、図9を用いて、説明する。
制御装置31は、補正制御開始スイッチ42が入状態になったか否かを判断し(ステップS210)、入状態になっていない場合には再びステップS210を行う。
ステップS210において補正制御開始スイッチ42が入状態になった場合、この時点においての左右一対のアウトドライブ装置10A・10Bのアウトドライブ装置回転数NDをアウトドライブ装置用回転数検出センサ40A・40Bによって検出する(ステップS220)。アウトドライブ装置回転数NDは記憶手段33に格納される。次に、左右一対のアウトドライブ装置10A・10Bの左右回動角度θA・θBを左右回動角度検出センサ38A・38Bによって検出する(ステップS230)。左右回動角度θA・θBは記憶手段33に格納される。次に、左右一対のアウトドライブ装置10A・10Bのアウトドライブ装置回転数NDA・NDB及び左右回動角度θA・θBに基づいて推進力ベクトルTA´・TB´を算出する(ステップS240)。推進力ベクトルTA´・TB´は記憶手段33に格納される。
次に、推進力ベクトルTA´・TB´のノルムから船体2の推進力TA・TBを得る(ステップS250)。ここで推進力の単位はエンジン回転数の二乗(単位:min−2)とする。また、推進力ベクトルTA´・TB´の方向から船体2の迎角αを得る(ステップS260)。
次に、制御装置31の演算手段32は、記憶手段33に予め記憶されている船体2の推進力Tと船体2の迎角αと補正値Kとの関係を用いて、ステップS250で得た船体2の推進力T、及びステップS260で得た船体2の迎角αから補正値Kを決定する(ステップS270)。
【0043】
ステップS270において、補正値Kが決定された後、表示モニタ60に補正値Kが決定されたことを示す表示がなされる。この表示がなされた時点で、オペレータが補正制御開始スイッチ42を押すことにより、補正値Kが記憶手段33に記憶される。補正値Kが記憶手段33に記憶されたことをもって、船体2の回頭動作の補正に関するキャリブレーションが終了する。
【0044】
このように構成することにより、船体2及び船舶の大きさに関わらず簡易な方法で補正値Kを算出することが可能となる。また、船速Vを検出することができなくとも簡易な方法で補正値Kを算出することが可能となり、コスト低減化も図れる。
【0045】
以上のように、左右一対のエンジン3A・3Bと、左右一対のエンジン3A・3Bのエンジン回転数Nをそれぞれ独立して変更する回転数変更アクチュエータ4A・4Bと、左右一対のエンジン3A・3Bにそれぞれ接続されて、スクリュープロペラ15A・15Bを回転させることによって船体2を推進させる左右一対のアウトドライブ装置10A・10Bと、エンジン3A・3Bとスクリュープロペラ15A・15Bとの間に配設される前後進切換クラッチ16A・16Bと、左右一対のアウトドライブ装置10A・10Bをそれぞれ独立して左右方向に回動させる左右一対の操舵用油圧アクチュエータ17A・17Bと、船舶の進行方向を設定するジョイスティック21と、ジョイスティック21の操作量を検出する操作量検出センサ39と、前記ジョイスティック21で設定した方向に進行するように、回転数変更アクチュエータ4A・4Bと前後進切換クラッチ16A・16Bと操舵用油圧アクチュエータ17A・17Bとを制御するための制御装置31と、を備える船舶操船装置1において、前記船体2の迎角αを検出するための迎角センサ36と、船体2の船速Vを検出するための船速センサ37と、船体2の迎角αと船体2の船速Vと補正値Kとの関係を記憶した記憶手段33と、補正値決定手段としての演算手段32と、を備え、船体2を斜航させた状態において、船体2が回頭しないようにジョイスティック21を操作した操作量を、演算手段32により決定して補正値Kとするものである。
【0046】
また、左右一対のエンジン3A・3Bと、左右一対のエンジン3A・3Bのエンジン回転数Nをそれぞれ独立して変更する回転数変更アクチュエータ4A・4Bと、左右一対のエンジン3A・3Bにそれぞれ接続されて、スクリュープロペラ15A・15Bを回転させることによって船体2を推進させる左右一対のアウトドライブ装置10A・10Bと、エンジン3A・3Bとスクリュープロペラ15A・15Bとの間に配設される前後進切換クラッチ16A・16Bと、左右一対のアウトドライブ装置10A・10Bをそれぞれ独立して左右方向に回動させる左右一対の操舵用油圧アクチュエータ17A・17Bと、船舶の進行方向を設定するジョイスティック21と、ジョイスティック21の操作量を検出する操作量検出センサ39と、前記ジョイスティック21で設定した方向に進行するように、回転数変更アクチュエータ4A・4Bと前後進切換クラッチ16A・16Bと操舵用油圧アクチュエータ17A・17Bとを制御するための制御装置31と、を備える船舶操船装置1において、船体2の迎角αを検出するための迎角センサ36と、アウトドライブ装置10A・10Bの推進力演算手段として及び補正値決定手段として演算手段32と、船体2の迎角αと船体2の船速Vと補正値との関係を記憶した記憶手段33、を備え、船体2を斜航させた状態において、船体2が回頭しないようにジョイスティック21を操作した操作量に基づいて、演算手段32により補正値Kを決定するものである。
【0047】
また、左右一対のエンジン3A・3Bと、左右一対のエンジン3A・3Bのエンジン回転数Nをそれぞれ独立して変更する回転数変更アクチュエータ4A・4Bと、左右一対のエンジン3A・3Bにそれぞれ接続されて、スクリュープロペラ15A・15Bを回転させることによって船体2を推進させる左右一対のアウトドライブ装置10A・10Bと、エンジン3A・3Bとスクリュープロペラ15A・15Bとの間に配設される前後進切換クラッチ16A・16Bと、左右一対のアウトドライブ装置10A・10Bをそれぞれ独立して左右方向に回動させる左右一対の操舵用油圧アクチュエータ17A・17Bと、船舶の進行方向を設定するジョイスティック21と、ジョイスティック21の操作量を検出する操作量検出センサ39と、前記ジョイスティック21で設定した方向に進行するように、回転数変更アクチュエータ4A・4Bと前後進切換クラッチ16A・16Bと操舵用油圧アクチュエータ17A・17Bとを制御するための制御装置31と、を備える船舶操船装置1において、アウトドライブ装置用回転数検出センサ40A・40Bと、左右回動角度検出センサ38A・38Bと、アウトドライブ装置10A・10Bのアウトドライブ装置回転数NDA・NDBと左右回動角度θA・θBから推進力ベクトルTA´・TB´を演算する推進ベクトル演算手段として、及び補正値決定手段としての演算手段32と、推進力ベクトルTA´・TB´のノルムから得られる船体2の推進力Tと推進力ベクトルTA´・TB´の角度θA・θBから得られる船体2の迎角αと補正値Kとの関係を記憶した記憶手段33と、を備え、船体2を斜航させた状態において、船体2が回頭しないようにジョイスティック21を操作した操作量に基づいて、演算手段32により補正値Kを決定するものである。
【0048】
このように構成することにより、船体2の船型や大きさに関わらず、簡易な方法で斜航操作時に起こる意図せぬ回転を補正するための補正値Kを決定し、船体2を意図する方向へ操舵することができる。
【0049】
[横移動の際の基準値決定に関する制御]
次に、制御装置31による、横移動の際の基準値決定に関する制御について図10を用いて説明する。制御装置31の演算手段32は基準値決定手段として制御を実行する。
【0050】
まず、基準値の決定に関する制御に入るまでのオペレータの手順について説明する。
オペレータは、ジョイスティック21を操作することにより、船舶を横移動させる。例えば、ジョイスティック21を図4のX軸(+)方向に倒すように操作する。
【0051】
ここで、ジョイスティック21をX軸(+)方向に倒すように操作しても、船舶が左舷方向に横移動しない場合、例えば、船舶が旋回したり(図11(A)参照)、船舶が斜航したり(図12(A)参照)した場合は、さらに、ジョイスティック21を操作して、ジョイスティック21の倒し量及び捩り量を変更することにより、船舶が左舷方向に横移動するように調整する。
【0052】
図11及び図12に示すように、左右一対のアウトドライブ装置10A・10Bのうち、左舷側のアウトドライブ装置10Aの推進力の方向は、船尾方向に対して左舷側斜め方向であるとともに、右舷側のアウトドライブ装置10Bの推進力の方向は、船首方向に対して左舷側斜め方向である。つまり、左舷側のアウトドライブ装置10Aの推進力の方向は、後進側であるとともに、右舷側のアウトドライブ装置10Bの推進力の方向は、前進側である。ここで、左舷側のアウトドライブ装置10Aの推進力をTA、右舷側のアウトドライブ装置10Bの推進力をTB、総推進力をTとすると、総推進力Tは、左舷側のアウトドライブ装置10Aの推進力の方向と右舷側のアウトドライブ装置10Bの推進力の方向との交点に作用することになる。なお、総推進力Tとは、左舷側のアウトドライブ装置10Aの推進力と右舷側のアウトドライブ装置10Bの推進力との合力のことをいう。
【0053】
図11(A)に示すように、左舷側のアウトドライブ装置10Aの推進力の方向と右舷側のアウトドライブ装置10Bの推進力の方向との交点が船舶の重心Gに一致していない場合、総推進力Tが船舶の重心Gに作用しない。このため、総推進力Tによるモーメントが船舶22の重心G周りに発生することから、船舶が右舷方向(平面視にて時計回り)に旋回することになる。
【0054】
この場合、ジョイスティック21をZ軸(−)方向に捩り操作して、左舷側のアウトドライブ装置10Aの回動角度θA及び右舷側のアウトドライブ装置10Bの回動角度θBを変更する。なお、船舶が左舷方向(平面視にて反時計回り)に旋回した場合は、ジョイスティック21をZ軸(+)方向に捩り操作する。これにより、図11(B)に示すように、左舷側のアウトドライブ装置10Aの推進力の方向と右舷側のアウトドライブ装置10Bの推進力の方向との交点が船舶の重心Gに一致して、総推進力Tが船舶の重心Gに作用すると、船舶が左舷方向に横移動する。
【0055】
また、図12(A)に示すように、左舷側のアウトドライブ装置10Aの推進力と右舷側のアウトドライブ装置10Bの推進力とが同じでない場合、総推進力Tが船舶を横移動させたい方向に作用しないため、船舶が斜航することになる。例えば、左舷側のアウトドライブ装置10Aの推進力が右舷側のアウトドライブ装置10Bの推進力よりも小さい場合には、船舶が船首方向に対して左舷側斜め方向に航行することになる。なお、スクリュープロペラ15A・15Bでは、その回転数が同じであっても正転している場合と逆転している場合とでは、回転によって発生する推進力が異なる。例えば、同じ回転数であれば正転時の方が逆転時よりも推進力が大きい。
【0056】
この場合、ジョイスティック21をX軸(+)方向の倒し量は同じままY軸(−)方向に傾倒操作して、左舷側のアウトドライブ装置10A(スクリュープロペラ15A)の回転数又は右舷側のアウトドライブ装置10B(プロペラ15B)の回転数を変更する。なお、船舶が船尾方向に対して左舷側斜め方向に航行した場合は、ジョイスティック21をX軸(+)方向の倒し量は同じままY軸(+)方向に傾倒操作する。これにより、図12(B)に示すように、左舷側のアウトドライブ装置10Aの推進力と右舷側のアウトドライブ装置10Bの推進力とが同じになって、総推進力Tが船舶を横移動させたい方向に作用すると、船舶が左舷方向に横移動する。
【0057】
次に、左弦方向に横移動する状態になった後、横移動制御開始スイッチ51を入状態にする。横移動制御開始スイッチ51が入状態になった場合、基準値決定に関する制御が開始される。基準値決定に関する制御について図10を用いて説明する。
【0058】
まず、制御装置31は、横移動制御開始スイッチ51が入状態になったか否かを判断し(ステップS410)、入状態になっていない場合には再びステップS410を行う。
【0059】
ステップS410において横移動制御開始スイッチ51が入状態になったと判断された場合には、ステップS420において、制御装置31は、横移動制御開始スイッチ51が入状態となった時点における左舷側の左右回動角度検出センサ38A及び右舷側の左右回動角度検出センサ38Bの検出値を読み込む。そして、制御装置31は、左舷側の左右回動角度検出センサ38Aの検出値に基づいて、左舷側のアウトドライブ装置10Aの回動角度θAを把握するとともに、右舷側の左右回動角度検出センサ38Bの検出値に基づいて、右舷側のアウトドライブ装置10Bの回動角度θBを把握する。
【0060】
ステップS430において、制御装置31は、横移動制御開始スイッチ51が入状態となった時点における基準舵角度(アウトドライブ装置10A・10Bの回動角度)を算出する。例えば、基準舵角度は、左舷側のアウトドライブ装置10Aの回動角度θAと右舷側のアウトドライブ装置10Bの回動角度θBとの平均値である。なお、基準舵角度とは、左舷側のアウトドライブ装置10Aの推進力の方向と右舷側のアウトドライブ装置10Bの推進力の方向との交点が船舶の重心Gに一致するときのアウトドライブ装置10A・10Bの回動角度のことをいう。
【0061】
ステップS440において、制御装置31は、横移動制御開始スイッチ51が入状態となった時点における左舷側のアウトドライブ装置用回転数検出センサ40A及び右舷側のアウトドライブ装置用回転数検出センサ40Bの検出値を読み込む。そして、制御装置31は、左舷側のアウトドライブ装置用回転数検出センサ40Aの検出値に基づいて、左舷側のアウトドライブ装置10Aの回転数NDAを把握するとともに、右舷側のアウトドライブ装置用回転数検出センサ40Bの検出値に基づいて、右舷側のアウトドライブ装置10Bの回転数NDBを把握する。
【0062】
ステップS450において、制御装置31は、横移動制御開始スイッチ51が入状態となった時点における基準推進力比を推定する。例えば、基準推進力比は、後進側となる方のアウトドライブ装置10A(10B)の回転数NDA(NDB)を前進側となる方のアウトドライブ装置10A(10B)の回転数NDA(NDB)で除した値である。本実施形態では、左舷側のアウトドライブ装置10Aの回転数NDAを右舷側のアウトドライブ装置10Bの回転数NDBで除した値である。なお、基準推進力比とは、左舷側のアウトドライブ装置10Aの推進力と右舷側のアウトドライブ装置10Bの推進力とが同じになるときの左舷側のアウトドライブ装置10Aの回転数NDAと右舷側のアウトドライブ装置10Bの回転数NDBとの比のことをいう。また、基準推進力比は、前進側となる方のアウトドライブ装置10A(10B)の回転数NDA(NDB)を後進側となる方のアウトドライブ装置10A(10B)の回転数NDA(NDB)で除した値としてもよい。
【0063】
ステップS430及びS450において、基準舵角度及び基準推進力比が推定された後、表示モニタ60に基準舵角度及び基準推進力比が推定されたことを示す表示がなされる。この表示がなされた時点で、オペレータが横移動制御開始スイッチ51を押すことにより、基準舵角度及び基準推進力比が記憶手段33に記憶される。すなわち、基準舵角度及び基準推進力比が更新される(ステップS460)。基準舵角度及び基準推進力比が記憶手段33に記憶されたことをもって、船体2の横移動の際の基準値決定に関するキャリブレーションが終了する。なお、船舶を右舷方向に横移動させるためのキャリブレーションも同様に行われる。
【0064】
なお、本実施形態に係る制御は、ステップS420、ステップS430、ステップS440、及びステップS450を全て行う制御に限定するものではなく、ステップS420及びステップS430を行い、ステップS440及びステップS450を行わない制御も可能であるし、ステップS440及びステップS450を行い、ステップS420及びステップS430を行わない制御も可能である。
【0065】
以上のように、左右舷方向に回動可能な左右一対のアウトドライブ装置10A・10Bを具備し、アウトドライブ装置10A・10Bの推進力によって航行する船舶の操船方法であって、アウトドライブ装置10A・10Bを作動させる操作手段であるジョイスティック21と、船舶22が左舷方向又は右舷方向に横移動している状態であることを確認したときに操作する確認手段である横移動制御開始スイッチ51と、アウトドライブ装置10A・10B、ジョイスティック21及び横移動制御開始スイッチ51が接続される制御装置31と、を用い、船舶が左舷方向又は右舷方向に横移動するようにジョイスティック21を操作してアウトドライブ装置10A・10Bを作動させ、船舶が左舷方向又は右舷方向に横移動している状態であることを確認したときに横移動制御開始スイッチ51を操作し、横移動制御開始スイッチ51が操作された時点におけるアウトドライブ装置10A・10Bの回動角度(基準舵角度)を制御装置31によって算出する。
【0066】
このような構成により、ジョイスティック21及び横移動制御開始スイッチ51を操作するだけで、船舶が横移動するときの基準舵角度が設定される。これにより、船舶が横移動するように容易に調整することができる。
【0067】
そして、一方のアウトドライブ装置10Aの回転数を検出するアウトドライブ装置用回転数検出センサ40Aと、他方のアウトドライブ装置10Bの回転数を検出するアウトドライブ装置用回転数検出センサ40Bと、アウトドライブ装置用回転数検出センサ40A・40Bが接続される制御装置31と、を用い、横移動制御開始スイッチ51が操作された時点における一方のアウトドライブ装置10A(10B)の回転数と他方のアウトドライブ装置10A(10B)の回転数との比を制御装置31によって算出する。
【0068】
このような構成により、ジョイスティック21及び横移動制御開始スイッチ51を操作するだけで、船舶が横移動するときの基準推進力比が設定される。これにより、船舶が横移動するように容易に調整することができる。
【0069】
なお、本発明に係る操作手段は、本実施形態に係るジョイスティック21に限定されるものではない。例えば、本発明に係る操作手段は、十字方向に傾倒可能なレバーや複数のレバー、ハンドルであってもよい。
【0070】
また、本発明に係る確認手段は、本実施形態に係る横移動制御開始スイッチ51に限定されるものではない。例えば、本発明に係る確認手段は、レバーであってもよい。
【符号の説明】
【0071】
1 船舶操船装置
2 船体
3A・3B エンジン
4A・4B 回転数変更アクチュエータ
10A・10B アウトドライブ装置
15A・15B スクリュープロペラ
16A・16B 前後進切換クラッチ
17A・17B 操舵用油圧アクチュエータ(操舵用アクチュエータ)
21 ジョイスティック(操作手段)
31 制御装置
36 迎角センサ(迎角検出手段)
37 船速センサ(船速検出手段)
38A・38B 左右回動角度検出センサ(左右回動角度検出手段)
39 操作量検出センサ(操作量検出手段)
40A・40B アウトドライブ装置用回転数検出センサ(アウトドライブ装置の回転数検出手段)
NA・NB エンジン回転数
NDA・NDB アウトドライブ装置回転数
θA・θB アウトドライブ装置の回動角度
TA´・TB´ 推進力ベクトル
TA・TB 推進力
α 迎角
V 船速
K 補正値
【特許請求の範囲】
【請求項1】
左右一対のエンジンと、
前記左右一対のエンジンの回転数をそれぞれ独立して変更する回転数変更アクチュエータと、
前記左右一対のエンジンにそれぞれ接続されて、スクリュープロペラを回転させることによって船体を推進させる左右一対のアウトドライブ装置と、
前記エンジンとスクリュープロペラとの間に配設される前後進切換クラッチと、
前記左右一対のアウトドライブ装置をそれぞれ独立して左右方向に回動させる左右一対の操舵用アクチュエータと、
船舶の進行方向を設定する操作手段と、
前記操作手段の操作量を検出する操作量検出手段と、
前記操作手段で設定した方向に進行するように、前記回転数変更アクチュエータと前後進切換クラッチと操舵用アクチュエータとを制御するための制御装置と、
を備える船舶操船装置において、
前記船体の迎角を検出するための迎角検出手段と、
前記船体の船速を検出するための船速検出手段と、
前記船体の迎角と船体の船速と補正値との関係を記憶した記憶手段と、
補正値決定手段と、
を備え、
前記船体を斜航させた状態において、船体が回頭しないように操作手段を操作した操作量に基づいて前記補正値決定手段により補正値を決定する
船舶操船装置。
【請求項2】
左右一対のエンジンと、
前記左右一対のエンジンの回転数をそれぞれ独立して変更する回転数変更アクチュエータと、
前記左右一対のエンジンにそれぞれ接続されて、スクリュープロペラを回転させることによって船体を推進させる左右一対のアウトドライブ装置と、
前記エンジンとスクリュープロペラとの間に配設される前後進切換クラッチと、
前記左右一対のアウトドライブ装置をそれぞれ独立して左右方向に回動させる左右一対の操舵用アクチュエータと、
船舶の進行方向を設定する操作手段と、
前記操作手段の操作量を検出する操作量検出手段と、
前記操作手段で設定した方向に進行するように、前記回転数変更アクチュエータと前後進切換クラッチと操舵用アクチュエータとを制御するための制御装置と、
を備える船舶操船装置において、
前記船体の迎角を検出するための迎角検出手段と、
前記アウトドライブ装置の推進力演算手段と、
前記船体の迎角と船体の推進力と補正値との関係を記憶した記憶手段と、
補正値決定手段と、
を備え、
船体を斜航させた状態において、船体が回頭しないように操作手段を操作した操作量に基づいて、前記補正値決定手段により補正値を決定する
船舶操船装置。
【請求項3】
左右一対のエンジンと、
前記左右一対のエンジンの回転数をそれぞれ独立して変更する回転数変更アクチュエータと、
前記左右一対のエンジンにそれぞれ接続されて、スクリュープロペラを回転させることによって船体を推進させる左右一対のアウトドライブ装置と、
前記エンジンとスクリュープロペラとの間に配設される前後進切換クラッチと、
前記左右一対のアウトドライブ装置をそれぞれ独立して左右方向に回動させる左右一対の操舵用アクチュエータと、
船舶の進行方向を設定する操作手段と、
前記操作手段の操作量を検出する操作量検出手段と、
前記操作手段で設定した方向に進行するように、前記回転数変更アクチュエータと前後進切換クラッチと操舵用アクチュエータとを制御するための制御装置と、
を備える船舶操船装置において、
前記アウトドライブ装置の回転数検出手段と、
前記アウトドライブ装置の左右回動角度検出手段と、
前記アウトドライブ装置の回転数と左右回動角度から推進力ベクトルを演算する推進ベクトル演算手段と、
前記推進力ベクトルのノルムから得られる船体の推進力と前記推進力ベクトルの方向から得られる船体の迎角と補正値との関係を記憶した記憶手段と、
補正値決定手段と、
を備え、
船体を斜航させた状態において、船体が回頭しないように操作手段を操作した操作量に基づいて、前記補正値決定手段により補正値を決定する
船舶操船装置。
【請求項1】
左右一対のエンジンと、
前記左右一対のエンジンの回転数をそれぞれ独立して変更する回転数変更アクチュエータと、
前記左右一対のエンジンにそれぞれ接続されて、スクリュープロペラを回転させることによって船体を推進させる左右一対のアウトドライブ装置と、
前記エンジンとスクリュープロペラとの間に配設される前後進切換クラッチと、
前記左右一対のアウトドライブ装置をそれぞれ独立して左右方向に回動させる左右一対の操舵用アクチュエータと、
船舶の進行方向を設定する操作手段と、
前記操作手段の操作量を検出する操作量検出手段と、
前記操作手段で設定した方向に進行するように、前記回転数変更アクチュエータと前後進切換クラッチと操舵用アクチュエータとを制御するための制御装置と、
を備える船舶操船装置において、
前記船体の迎角を検出するための迎角検出手段と、
前記船体の船速を検出するための船速検出手段と、
前記船体の迎角と船体の船速と補正値との関係を記憶した記憶手段と、
補正値決定手段と、
を備え、
前記船体を斜航させた状態において、船体が回頭しないように操作手段を操作した操作量に基づいて前記補正値決定手段により補正値を決定する
船舶操船装置。
【請求項2】
左右一対のエンジンと、
前記左右一対のエンジンの回転数をそれぞれ独立して変更する回転数変更アクチュエータと、
前記左右一対のエンジンにそれぞれ接続されて、スクリュープロペラを回転させることによって船体を推進させる左右一対のアウトドライブ装置と、
前記エンジンとスクリュープロペラとの間に配設される前後進切換クラッチと、
前記左右一対のアウトドライブ装置をそれぞれ独立して左右方向に回動させる左右一対の操舵用アクチュエータと、
船舶の進行方向を設定する操作手段と、
前記操作手段の操作量を検出する操作量検出手段と、
前記操作手段で設定した方向に進行するように、前記回転数変更アクチュエータと前後進切換クラッチと操舵用アクチュエータとを制御するための制御装置と、
を備える船舶操船装置において、
前記船体の迎角を検出するための迎角検出手段と、
前記アウトドライブ装置の推進力演算手段と、
前記船体の迎角と船体の推進力と補正値との関係を記憶した記憶手段と、
補正値決定手段と、
を備え、
船体を斜航させた状態において、船体が回頭しないように操作手段を操作した操作量に基づいて、前記補正値決定手段により補正値を決定する
船舶操船装置。
【請求項3】
左右一対のエンジンと、
前記左右一対のエンジンの回転数をそれぞれ独立して変更する回転数変更アクチュエータと、
前記左右一対のエンジンにそれぞれ接続されて、スクリュープロペラを回転させることによって船体を推進させる左右一対のアウトドライブ装置と、
前記エンジンとスクリュープロペラとの間に配設される前後進切換クラッチと、
前記左右一対のアウトドライブ装置をそれぞれ独立して左右方向に回動させる左右一対の操舵用アクチュエータと、
船舶の進行方向を設定する操作手段と、
前記操作手段の操作量を検出する操作量検出手段と、
前記操作手段で設定した方向に進行するように、前記回転数変更アクチュエータと前後進切換クラッチと操舵用アクチュエータとを制御するための制御装置と、
を備える船舶操船装置において、
前記アウトドライブ装置の回転数検出手段と、
前記アウトドライブ装置の左右回動角度検出手段と、
前記アウトドライブ装置の回転数と左右回動角度から推進力ベクトルを演算する推進ベクトル演算手段と、
前記推進力ベクトルのノルムから得られる船体の推進力と前記推進力ベクトルの方向から得られる船体の迎角と補正値との関係を記憶した記憶手段と、
補正値決定手段と、
を備え、
船体を斜航させた状態において、船体が回頭しないように操作手段を操作した操作量に基づいて、前記補正値決定手段により補正値を決定する
船舶操船装置。
【図1】


【図2】

【図3】

【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図11】

【図12】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−14173(P2013−14173A)
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願番号】特願2011−146742(P2011−146742)
【出願日】平成23年6月30日(2011.6.30)
【出願人】(000006781)ヤンマー株式会社 (3,810)
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願日】平成23年6月30日(2011.6.30)
【出願人】(000006781)ヤンマー株式会社 (3,810)
[ Back to top ]