
船舶昇降機の運転方法
【課題】船舶を持ち上げ、又は下ろすための船舶昇降機の運転方法を提供する。
【解決手段】昇降台と、昇降台上で吊り上げられるべきアイテムの荷重を支えるための複数の不規則に間隔の開いたブロッキング機構とを有する吊り上げ機構を操作する方法であって、昇降台に対するブロッキング機構のそれぞれに関する位置データを収集すること122、吊り上げられるべきアイテムの質量を推定すること、吊り上げられるべきアイテムの縦方向の重心を推定すること、不規則に間隔の開いたブロッキング機構の位置と、質量と、吊り上げられるべきアイテムの縦方向の重心とに基づいて昇降台上の推定された積載曲線を計算すること124、そして、推定された積載曲線を出力すること126を含む方法。
【解決手段】昇降台と、昇降台上で吊り上げられるべきアイテムの荷重を支えるための複数の不規則に間隔の開いたブロッキング機構とを有する吊り上げ機構を操作する方法であって、昇降台に対するブロッキング機構のそれぞれに関する位置データを収集すること122、吊り上げられるべきアイテムの質量を推定すること、吊り上げられるべきアイテムの縦方向の重心を推定すること、不規則に間隔の開いたブロッキング機構の位置と、質量と、吊り上げられるべきアイテムの縦方向の重心とに基づいて昇降台上の推定された積載曲線を計算すること124、そして、推定された積載曲線を出力すること126を含む方法。
【発明の詳細な説明】
【技術分野】
【0001】
本願は、参照によりその全体を本明細書に援用する2004年6月16日出願の米国特許出願第60/579,677号の優先権を主張する。
【0002】
本発明は、船舶昇降機に関し、より詳細には船舶昇降機の運転方法に関する。
【背景技術】
【0003】
船舶昇降機は、一般に、昇降台の反対側に接続された2列のホイストを含む。ホイストは、電力又は水力で駆動されたウィンチ又は水力ラムを含めて多くの種類があってよく、またワイヤ・ロープ又は鎖などを含む別の手段で昇降台に接続されてもよい。使用されるホイストの数とサイズとは、吊り上げられるべき荷重に応じて必要に応じて多様であってよい。典型的な船舶昇降機は、4〜110のホイストを使用する。
【0004】
船舶昇降機の昇降台は、固定であっても、又は本願の譲受人が供給するように、昇降台の部分が昇降台の他の部分に対して縦に移動することができるよう連接してもよい。本発明の譲受人により通常使用されるタイプの昇降台では、昇降台は、移動の指定範囲内で相互に連接することのできる複数の主要横ビーム(MTB)を含む。各MTBは、MTBの他端に接続された2つのホイストの間で支えられる。MTBは、それぞれのMTB間で相対的な移動を依然として可能にしながら、昇降台を形成するために周知の方法で接続される。状況によっては、昇降台は、より大きな船舶/大型船舶を持ち上げるために共同して動作するか、又は複数のより小さい船舶/大型船舶を独立して吊り上げるために相互に独立して動作することのできる複数のセクションとして構築することができる。
【0005】
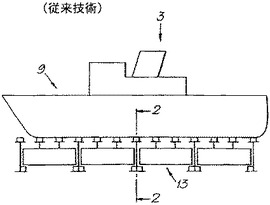
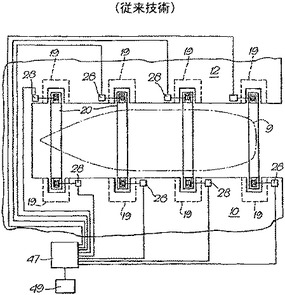
本発明を使用することのできる従来技術の船舶昇降機の一例は、本発明の譲受人に譲渡され、本明細書で図1から図4に示す、米国特許第RE37,061号、「Method of Distributing Loads Generated Between A Ship And A Supporting Dry Dock(「船舶と支持乾ドック間で生成される荷重の分散方法」)」に記載されている。図1を参照すると、米国特許第4,087,979号に記載の種類の昇降台13は、埠頭10(図2)に対する縦移動について船舶9を支える。次に図2を参照すると、昇降台13は、埠頭10(図1)と12(図4)の対抗面の切欠き17内にその端部がある複数のMTB20を含む。ビーム20の端部は滑車18を担持している。
【0006】
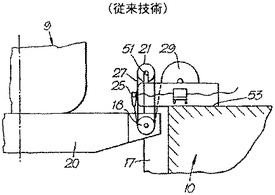
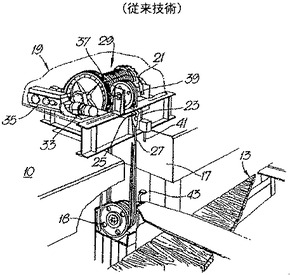
ここではホイスト・ウィンチ19の形式で、複数の対抗するホイストの対が使用される。図4を参照されたい。各ホイスト・ウィンチ19は、それぞれの埠頭に固定され、滑車18と粗縦に整列したさらなる滑車21を支え、さらにウィンチ・ドラム29を含んでいる。図2及び3を参照されたい。ワイヤ・ロープ27は、一端がクレビス・ピンとしての役割も果たすロードセル25により固定されており、またホイスト・ウィンチ19の構造の端部に固定されている。ロープ27は滑車18及び21周囲に巻き付けられており、残りの端部は滑車18から出てウィンチ・ドラム29に接続される。各ウィンチ・ドラム29は、AC同期モータ33により、ドラム29端部にあるステップダウン・ギア配置35と鋸歯状の車輪37を介して駆動される。限定スイッチ41は、ビーム20が支えるホイスト・ウィンチ19と接続パッド43の構造に固定される。限定スイッチは事前設定されており、昇降台13が動作中にその所望の高さまで上がると、パッド43が限定スイッチ41に接触し、限定スイッチ41は次いで昇降台20の停止を有効にするように作動される。昇降台13の最大所望低位置を特定するために、システム内の装置(図示せず)が利用される。
【0007】
昇降台13とその関連する船舶9を持ち上げ、又は下ろすためのホイスト・ウィンチ19の動作中、調整回路28は、そのウィンチ19に関連するロードセル25から電気信号を受け取る。図4を参照されたい。各回路28からの出力は、コンピュータ/CPU47に送信される。コンピュータ47は、ホイスト・ウィンチ19の動作を停止し、又は可能にして、受信したデータを処理し、船舶昇降機制御パネルに制御信号を送信することができ、また例えば、感知されている荷重、またウィンチ・モータ33に消費される電流、昇降/下降中の大型船舶の重量、及びシステムの他の特徴など、ホイスト・ウィンチ19の動作性能を考慮する情報を表示するためにさらなる信号を視覚表示ユニット49に送信することができる。
【0008】
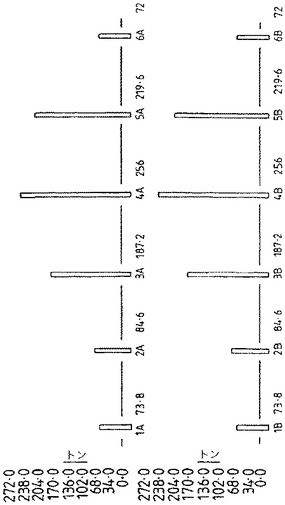
図5は、ホイスト・ウィンチ19にかかる特定船舶の重量分散をヒストグラムと数値双方の形式で表示する。対向するウィンチ・ステーション1A及び1Bには、それぞれに73.8トンの荷重がかかる。ステーション4A及び4Bには、それぞれに256トンの荷重がかかり、ステーション6A及び6Bには、それぞれに72トンの荷重がかかる。0より上で示された重量は、船舶に関する。ヒストグラムの0の線より下の突出は、程度では同一であり、昇降台の一定の重量に相当する。
【0009】
上記説明は、クレビス・ピン形式によるロードセル25の使用を開示する。しかしロードセルの他の形式は、動作中にホイスト・ウィンチ19にかかる荷重のロード・パスのどこにでも使用し、配置することができる。したがって、一例として、ロードセルを、ホイスト・ウィンチ滑車21の支持構造51上に、又はホイスト・ウィンチ19と埠頭10及び12の間の53に、又はクレビス・ピン支持具に配置することができる。すなわち、適切に適応された形状のロードセル上に支えられた通常のクレビス・ピン25を使用して配置することができる。
【0010】
ATLAS(登録商標)という名称を付した、本願の譲受人により供給される周知の船舶昇降制御システムは、船舶昇降オペレータに船舶昇降動作情報を提供する。例えば、それは、オペレータが入力したデータから計算された大型船舶の有望な分散された荷重を示す、計算された荷重分散画面を含む。分散された荷重が最大設計分散荷重より上の場合、モニタは、その大型船舶が船舶昇降機に過積載になる可能性があり、ドック入りすべきでないという警報を表示する。警報が示された場合、ブロック上の大型船舶荷重の分散は、重心を積載されたブロッキングの中心線付近に移動することにより変更することができる。次のドッキング・パラメータは、オペレータにより入力される。
W=船舶の荷重
LK=竜骨を支えるブロックの長さ
A=第1のブロックから岸壁の防水壁までの、メートル(フィート)による距離
LCG=船舶の重心から岸壁の防水壁までの距離
設定限界は、ディスプレイのウィンドウ内に、値を入力するための入力設定ボックスと共に示される。ディスプレイは、ドック入りすべき大型船舶に対する計算された荷重分散を示す。
【0011】
ATLAS(登録商標)システムは、昇降台上の大型船舶の縦方向と横方向の重心と、各主要横ビーム上の一隻分の積荷量とに関する情報を提供する重心モードも含む。
【0012】
この情報は、不正確な大型船舶の測位など、いかなるドック入りの異常でも特定するためにオペレータが使用することができる。
【0013】
米国特許第RE36,971号、「Method Of Determining And Analyzing A Ship’s Weight(船舶重量を特定し分析する方法)」と、第RE37,061号、「Method of Distributing Loads Generated Between A Ship And A Supporting Dry Dock(船舶と支える乾ドックの間で生成される荷重を分散する方法)」は、どちらも船舶昇降機を操作する方法を記載している。
【0014】
すべて船舶昇降機に関しており、本発明の譲受人又は協力企業に譲渡された、米国特許第3,073,125号、4,087,979号、RE36,971号、及びRE37,061号を参照により本明細書に援用する。
【発明の概要】
【0015】
昇降台は、少なくとも1つのホイストによりそれぞれが支えられる複数の主要横ビーム(「MTB」)を含む。
【0016】
一形態では、昇降台上で吊り上げられるべきアイテムの荷重を支えるために、昇降台と複数の不規則に間隔を空けたブロッキング機構とを有する吊り上げ機構を操作する方法は、昇降台に関するブロッキング機構のそれぞれに関する位置データを収集すること、吊り上げるべきアイテムの質量を推定すること、及び吊り上げるべきアイテムの縦方向の重心を推定することを含む。不規則に間隔を空けたブロッキング機構の位置と、吊り上げるべきアイテムの質量及び縦方向の重心とに基づく昇降台上の推定された積載曲線が計算され、推定された積載曲線が出力される。
【0017】
一形態では、昇降台、昇降台を吊り上げるための複数のホイスト、及び昇降台上で吊り上げるべきアイテムの荷重を支えるための複数のブロッキング機構を有する吊り上げ機構を操作する方法は、ブロッキング機構それぞれに関する位置データを収集すること、及び各ホイスト上の荷重を読み取ることを含む。各ブロッキング機構の位置と、各ホイスト上の荷重と、昇降台の剛性とその荷重との間の所定の関係とに基づく各ブロッキング機構上の荷重が計算され、各ブロッキング機構上の計算された荷重が出力される。
【0018】
一形態では、昇降台と、昇降台を吊り上げるための複数のホイストと、昇降台上で吊り上げるべきアイテムの荷重を支えるための複数のブロッキング機構とを有する吊り上げ機構を操作する方法は、ブロッキング機構それぞれに関する位置データを収集すること、及び各ホイスト上の荷重を読み取ることを含む。各ホイスト上の荷重と、各ブロッキング機構の測位と、昇降台の長さとに基づく昇降台上の推定されたメータ当たりトン積載が計算され、推定されたメータ当たりトン計算値が出力される。
【0019】
一形態では、吊り上げ機構を操作する方法は、吊り上げ機構の始動の際に吊り上げ機構の動作の監視を活動化すること、吊り上げ機構のある動作パラメータを監視すること、動作パラメータを所定のトリガ・パラメータと比較すること、及びトリガ・パラメータのいずれかに達した際に動作パラメータをログ記録することを含む。
【0020】
一形態では、吊り上げ機構を操作する方法は、吊り上げ機構制御を活動化する際に監視システムを活動化すること、監視すべきシステム・パラメータのセットを選択すること、及び少なくともあるシステム・パラメータに対するトリガ基準のセットを選択することを含む。次いでシステム・パラメータは、トリガ基準のいずれかに達するまで監視され、次いでシステム・パラメータは、トリガ基準のいずれかに一度達すると永続メモリにログ記録される。
【0021】
背景技術の節に記載の問題点に対する解決策を提供することが、本発明の目的である。
【0022】
本明細書に記載の特徴及び/又は利点を提供する吊り上げ機構を操作する1つ又は複数の方法を提供することが、本発明の目的である。
【図面の簡単な説明】
【0023】
【図1】(従来技術)船舶昇降機の略式側面図である。
【図2】(従来技術)図1の線2から2の部分的略図である。
【図3】(従来技術)図1の船舶昇降機のホイスト・ウィンチの絵図である。
【図4】(従来技術)図1の船舶昇降機の部分的平面図である。
【図5】(従来技術)図1の船舶昇降機上の船舶の重量分散の表示である。
【図6】本発明の第1のモードの論理フローチャートである。
【図7】船舶昇降機と各ホイストの荷重との略図である。
【図8】本発明の第2のモードの論理フローチャートである。
【図9】本発明の第3のモードの論理フローチャートである。
【図10】本発明の第4のモードの論理フローチャートである。
【図11】本発明の第5のモードの論理フローチャートである。
【図12】本発明の第6のモードの論理フローチャートである。
【発明を実施するための形態】
【0024】
一例として、また添付の図面を参照して、本発明を説明する。
本発明は、船舶昇降機のいくつかの運転方法を含む。第1は、自動微動モードである。船舶を吊り上げる場合、昇降台の各主要横ビーム上の荷重は、吊り上げられるべき船舶の形状、船舶の積載、船舶と昇降台の間のブロッキングなどを含めた様々な要因により、通常は均一ではない。ある状況下において、1つ又は複数のMTBは、他のMTBに関して望まれるよりも高い荷重又は低い荷重を支えることができる。MTBは相互に連接されるので、それらMTBが支えている荷重に影響を与えるために、個々の横ビームに対して規定された安全範囲内で様々な高度調整を行うことができる。昇降台の他のMTBに関して個々のMTBを上げたり下げたりすることを、「微動」と称する。上記のRE37,061、「船舶と支持乾ドック間で生成される荷重の分散方法」は、昇降台のMTB間で荷重を移すための、従来技術によるMTBの微動方法を開示する。
【0025】
一例として、特定船舶の船体の形状と船舶と昇降台の間のブロッキングの構成/配置により、1つのMTBは隣接MTBよりも遥かに高い荷重を支えていると分かる場合がある。これは、それ以外のMTBと昇降台全体自体は依然として安全限界内にあっても、そのMTB上の荷重が安全限界を超過する状況をもたらす場合がある。さらに、荷重の多いMTB上に対するこれと同じ荷重は、船舶の船体の局所的に支えられた領域にも加えられるので、船体上で局在化した積載が安全限界を超過した場合は船舶の船体自体に損傷が発生する可能性がある。
【0026】
別の実施形態では、1つのMTBが隣接MTBよりも遥かに軽い荷重を支えていることが分かる場合がある。そのような場合、船舶昇降機がその安全運転限界付近まで船舶を吊り上げる場合は特に、より荷重の重い隣接MTBからより荷重の軽いMTBに荷重を移すことが望ましい場合がある。
【0027】
第1の例では、より荷重の重いMTB上の荷重は、そのMTBを他のMTBよりも低くし、したがって荷重の重いMTBからその荷重の一部をその昇降台の他のMTBに移すことにより低減することができる。第2の例では、荷重の軽いMTB上の荷重は、そのMTBを他のMTBよりも高くし、したがって他のより荷重の重いMTBからその荷重の一部をより荷重の軽いMTBに移すことにより、増加させることができる。昇降台の個々のMTBの微動は上記のように多大な利益を有する場合があるが、技術と知識のあるオペレータが実行しない場合には、多大のリスクを与える場合もある。例えば、高さの差異により、複数の隣接MTBがそれらの連接された接合部を引き離し、それぞれが分離されることになる前に、個別のMTBは隣接MTBに対してそれだけ高めたり低めたりすることしかできない。これは、昇降台上の有害な状況の原因となる。さらに、近くに配置されたMTB上の荷重はある程度相関するので、1つのMTBが上又は下に移動しすぎると、そのMTB又は他のMTBの過積載が生じる場合がある。したがって、微動プロセスは、厳しいガイドラインに準拠することによってのみ、安全に実行することができる。
【0028】
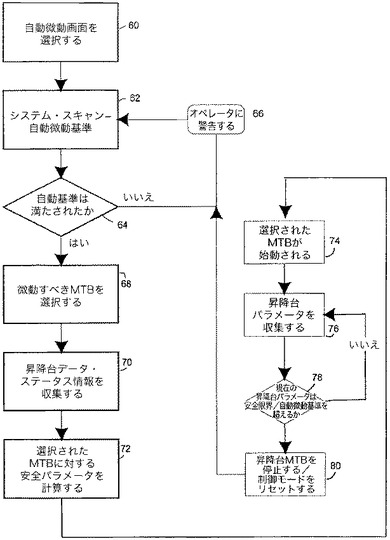
図6は、本発明の自動微動モードの操作方法を示す。吊り上げ動作が開始される前に、昇降台は、各MTB上の基礎荷重(すなわち、昇降台とブロッキングの荷重)が確認され、昇降台が、各MTBの高さを相互に平均化するために平均化手順を通過する、予備手順を通過する。一度その予備手順が完了すると、実際の吊り上げ動作を開始することができ、船舶昇降は自動微動モードに入ることができる。ステップ60で、船舶昇降制御ディスプレイの自動微動画面が選択される。これは船舶昇降オペレータにより手動で選択することができ(例えば、キーボード、マウス又はタッチパッドにより)、又は微動が有利であることを示すあるパラメータを船舶昇降制御システムが検出した場合に自動的に選択することができる。
【0029】
ステップ62で、自動微動が望ましいか否かを判定するためにシステム・スキャンが実行される。これは、各MTB上の「自重」を感知し分析することを特に必然的に伴う。この自重は、船舶自体の実際の荷重を提供するために基礎荷重を減じたMTB(船舶を含めて)上の全荷重である。システムは、昇降台と個々のMTBの現在位置も読み取ることができる。これは、実際の距離測定を通して、又は例えば予備平均化動作から電気ウィンチ・ホイスト19が導出された時間量に基づいて計算された距離で実行することができる。例えば、ホイスト・ウィンチ19が分速25mmでMTBを移動させ、そのホイスト・ウィンチが平均化動作から3分間運転された場合、MTBは75mm移動したと計算することができる。
【0030】
次いで、個別のMTB上の荷重が他のMTB上の荷重よりも所定量だけ重いか軽いか、且つ/又は個別のMTB上の荷重がその安全限界に近づいているか否かが判定される。この要因は、実際の荷重の数字及び/又は選択されたMTB間の積載比率の点で考慮することができる。ディスプレイ49は、例えば図5に示すような各MTB上の積載を表示することが好ましい。このステップ中、船舶の船首又は船尾付近に置かれ、他のMTBよりも遥かに軽い積載を有することが期待されるMTBは、任意に考慮から省略することができる。ステップ62で任意に考慮することのできる別の基準は、微動候補である場合のあるMTBが依然として安全高さ調整範囲内にあるか否かである。これは、以前に微動が実行されたことがあるか否かを考慮に入れることができる。他の基準も任意に考慮することができる。
【0031】
ステップ64で、自動微動が勧められたことを示す自動微動基準が満たされるか否かが判定される。満たされない場合、ステップ66でディスプレイ49により、又は他の信号によりオペレータに警告することができ、方法はステップ62に戻り、自動微動基準が満たされたと判定されるまで、又はプログラムが停止するまで循環を続ける。基準が満たされた場合、ステップ68で、微動されるべきMTBが選択される。これは、システムが、基準に基づいてどのMTBを自動的に微動すべきかを示唆することにより自動的に行うことができる。このような場合、方法は、下記の残りのステップを通して自動的に続行するか、又は先に進む前にオペレータに認証を要求することができる。或いは、オペレータは、微動すべきMTBを選択することができる。
【0032】
ステップ70で、システムは、各MTBの現在の自重示度数を収集し、記憶するが、また各MTBの現在位置を収集し、記憶することもできる。ステップ72で、システムは、選択されたMTBを微動することのできる安全パラメータを計算する。1つの要因は、そのMTBを微動することのできる最大距離である。これは、MTBのどれだけの移動が許可されるかを特定するために、(他のMTBに対する)MTBの設計された許容可能な移動を(他のMTBに対する)MTBの実際の位置と比較することにより計算することができる。別の要因は、システムに事前プログラムすることができ、又はデータ・テーブル/ファイル全体にアクセスすることのできる、MTB上の最大許可荷重である。別の要因は、微動後のMTB上の望まれる荷重であってよい。ステップ74で、選択されたMTBの微動が開始される。これは、他のMTBを静止させておきながら、関連付けられたホイスト・ウィンチ19の動作を通じて個別のMTBの移動を許可する、システムの特別な制御モードに入ることにより行うことができる。
【0033】
ステップ76で、システムは、各MTB上の荷重と各MTBの位置とを含めて現在の昇降台パラメータを収集する。これは、MTBの初期荷重と移動量に基づいて、荷重予測要因を使用して荷重を推定することもできる。ステップ78では、ステップ76で収集されたデータが、ステップ72で確立された安全パラメータと比較され、その安全パラメータに達したか又は超えたかが判定される。システムがこのモード中はいかなる危険な状況をも作り出さないことを保証するために、ステップ72で特定された安全要因に、ステップ74から78で実際の安全動作の限界を超えないように、組み込まれた安全マージンを含めることができる。或いは、ステップ78は、現在の昇降台パラメータの1つ又は複数が、ステップ72で特定された安全パラメータの1つ又は複数のある部分を超えたと判断された時に、MTBの移動を停止すべきことを信号で伝える比較モードで動作することができる。例えばステップ78は、MTBの実際の移動がステップ72で特定された許可された移動の90%を超えた時にMTBの移動を停止すべきことを信号で伝えることができる。他の比較要因も使用することができる。
【0034】
安全パラメータを超えていない場合、プロセスはステップ76に戻り、ステップ76と78を通して循環を続行する。そして、プロセスがステップ80に移動して、昇降台が停止され制御モードがリセットされる時点である、安全パラメータの1つに達したか超えたと判定されるまで、又は望ましい荷重移動が達成されるまでは、船舶昇降のステータスを連続して監視する。次いでステップ66でオペレータにこのことが警告され、プロセスはステップ62に戻る。
【0035】
MTBの他端を支えるホイストを静止させておきながら、MTBの一端を支えるホイストを駆動することにより、個別のMTBの他端で荷重を再分散するために、このモードを上記と類似の方法で使用することができる。
【0036】
このモード並びに下記で説明する他のモードは、船舶昇降制御システムにより動作させることができる。この船舶昇降制御システムは、上記の船舶昇降機において、コンピュータ/CPU 47とディスプレイ49とを含む。これはまた、プログラム可能な論理コントローラなど、他のタイプのコントローラを使用することができる。
【0037】
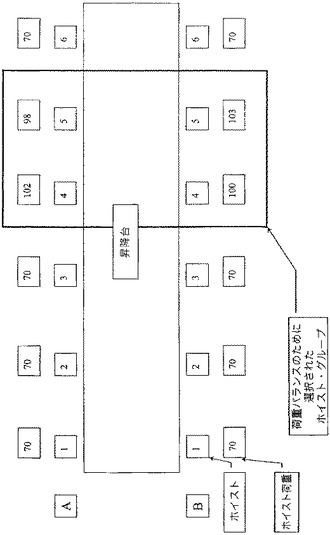
本発明の方法の第2のモードは、荷重バランス・モードである。これは上記の自動微動モードに類似しているが、単一のMTBを微動する代わりに、他のMTBと比較して不均衡な荷重を搬送する複数群のMTBが一斉に微動される。船舶昇降機の略図である図7を参照されたい。図示するように、ホイストA4、A5、B4及びB5の一群は、他のホイストよりも不均衡に高い荷重を搬送している。このような状況では、ホイスト/MTBのすべての間で荷重をより均一に均衡をとるように、荷重を再分散することが望ましい場合がある。この場合、選択された一群は、その荷重の一部を他のMTBに移すために、他のMTBに対して低められることが望ましい。
【0038】
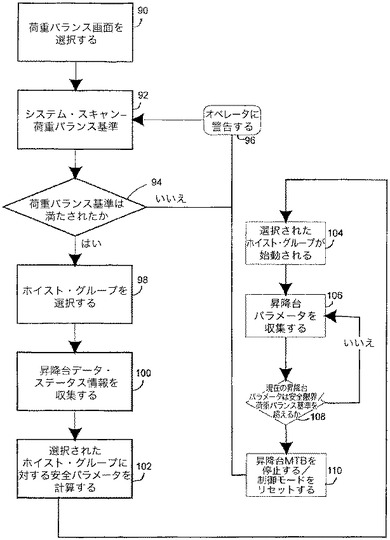
ホイスト/MTBの様々な群の異なる計算と分析を使用することができるが、このモードは自動微動モードと類似して動作する。図8は、本発明の荷重バランス・モードを操作する方法を示す。吊り上げ動作を開始する前に、昇降台は、上記の自動微動モードと同様に予備手順を通過する。一度予備手順が完了すると、実際の吊り上げ動作を開始することができ、船舶昇降機は荷重バランス・モードに入ることができる。ステップ90で、船舶昇降制御ディスプレイの荷重バランス画面が選択される。これは船舶昇降制御オペレータにより手動で選択することができ、又は船舶昇降制御システムが、荷重均衡が有利なことを示すある種のパラメータを検出した時に自動的に選択することができる。
【0039】
ステップ92で、荷重均衡が望ましいか否かを判定するためにシステム・スキャンが実行される。これは、各MTB上の自重を感知し分析すること、並びに荷重確実MTBをグループ化し、そのような荷重を他の複数群のMTBの荷重と比較することを特に必然的に伴う。システムは、昇降台と個々のMTBの現在位置も読み取ることができる。次いで、一群のMTB上の荷重が、他のMTB上の荷重よりも所定量だけ重いか軽いか、且つ/又は一群のMTB上の荷重が、安全限界に接近しているか否かが判定される。このステップ中、船舶の船首又は船尾付近に置かれ、他のMTBよりも遥かに軽い積載を有することが期待されるMTBは、任意に考慮から省略することができる。ステップ72で任意に考慮することのできる別の基準は、微動候補である場合のある一群のMTBが依然として安全高さ調整範囲内にあるか否かである。これは、以前に微動が実行されたことがあるか否かを考慮に入れることができる。他の基準も任意に考慮することができる。
【0040】
ステップ94で、荷重均衡が勧められたことを示す荷重均衡基準が満たされるか否かが判定される。満たされない場合、ステップ96でディスプレイ49により、又は他の信号によりオペレータに警告することができ、方法はステップ92に戻り、荷重均衡基準が満たされたと判定されるまで、又はプログラムが停止するまで循環を続ける。基準が満たされた場合、ステップ98で、微動されるべき一群のMTB(ホイスト)が選択される。これは、システムが、基準に基づいてどの群のMTBを自動的に微動すべきかを示唆することにより自動的に行うことができる。このような場合、方法は、下記の残りのステップを通して自動的に続行するか、又は先に進む前にオペレータに認証を要求することができる。或いは、オペレータは、微動すべき一群のMTBを選択することができる。
【0041】
ステップ100で、システムは、各MTBの現在の自重示度数を収集し、記憶するが、また各MTBの現在位置を収集し、記憶することもできる。ステップ102で、システムは、選択された一群のMTBを微動することのできる安全パラメータを計算する。1つの要因は、そのMTBを微動することのできる最大距離である。これは、選択された一群のMTBのどれだけの移動が許可されるかを特定するために、(他のMTBに対する)選択された一群のMTBの設計された許容可能な移動を、(他のMTBに対する)選択された一群のMTBの実際の位置と比較することにより計算することができる。別の要因は、システムに事前プログラムすることができ、又はデータ・テーブル/ファイルを通じてアクセスすることのできる、選択された数群のMTB上の最大許可荷重である。別の要因は、微動後の選択された数群のMTB上の望まれる荷重であってよい。ステップ104で、選択された数群のMTBの微動が開始される。これは、他のMTBを静止させておきながら、関連付けられたホイスト・ウィンチ19の動作を通じて一群のMTBの移動を許可する、システムの特別な制御モードに入ることにより行うことができる。
【0042】
ステップ106で、システムは、各MTB上の荷重と各MTBの位置とを含めて現在の昇降台パラメータを収集する。これは、MTBの初期荷重と移動量に基づいて、荷重予測要因を使用して荷重を推定することもできる。ステップ108では、自動微動モードに関して上記で説明したのと同じ方法で、ステップ106で収集されたデータが、ステップ102で確立された安全パラメータと比較され、その安全パラメータに達したか又は超えたかが判定される。安全パラメータを超えていない場合、プロセスはステップ106に戻り、ステップ106と108を通して循環を続行する。そして、プロセスがステップ110に移動して、昇降台が停止され制御モードがリセットされる時点である、安全パラメータの1つに達したか超えたと判定されるまで、船舶昇降機のステータスを連続して監視する。次いでステップ96でオペレータにこのことが警告され、プロセスはステップ92に戻る。
【0043】
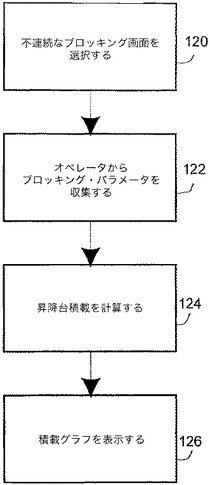
本発明の方法の第3のモードは不連続なブロッキング・モードである。船舶と昇降台との間の接続装置は移送システムである。それぞれの別個のクレードルは、昇降台上の大型船舶を支える木で上を覆った翼状のものの付いたブロックを有する。この移送システムには、大型船舶/積載フォーム又は動作可能な要件に適合するために規則的な間隔で空間が空いている。既存のATLAS(登録商標)システムは、オペレータが様々なドッキング・パラメータを入力することを可能にするために、上記のように計算された荷重分散画面を提供するが、均一の連続したブロッキング、すなわち各ブロックの対の間の固定された均一の距離を前提とする。次いでシステムは、台形積載曲線を前提とする荷重分散を計算し表示する。
【0044】
場合によっては、船体に特色又は船体の一部に損傷を有する大型船舶をドックに入れることが必要な場合がある。この状態は、規則的なブロッキング間隔の中断、すなわちブロッキング配置が不連続であるか又は遮られることを決定する場合がある。これは、結果として生じた台形積載曲線の大きさと分散に多大な影響がある場合がある。この第3のモードは、オペレータが、ブロッキングの提案された配置がこの船舶を適切に支えるために十分か否かを判定するために積載パラメータと積載曲線が正確に計算され、分析されるように、不連続なブロッキングの詳細を入力することを可能にする。
【0045】
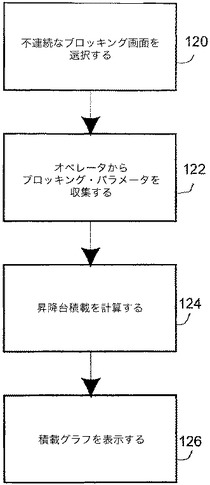
図9は、このモードのための論理フローチャートを示す。ステップ120で、オペレータは、上記の方法でブロッキング画面を選択する。ステップ122で、システムは、提案された特定のブロッキング配置に関してオペレータからブロッキング情報を収集する。これは、特に、ブロッキング配置の縦方向のスタート位置、ブロッキング・クレードル・トレインのギャップを含むブロック・セット間の間隔、大型船舶の質量と推定される縦方向重心とを含むことができる。次いでシステムは、ステップ124でこの情報に基づいて昇降台積載を計算し、提案されたブロッキング配置のためにステップ126で推定された1つ又は複数の積載曲線を図面により表示する。これは、提案されたブロッキングが船舶を適切に支えるか否か、又はブロッキング配置に対して調整が必要か否かを判定するために、オペレータが分析することができる。システムは、推定された積載曲線を自動的に分析し、その推定された積載が安全な動作限界をいかなる方法でも超える場合は画像又は他の警告を提供するようにも構成することができる。そのような場合、このモードは、安全な動作限界内にある推定された積載曲線を提供する修正されたブロッキング配置を自動的に提案するように構成することもできる。
【0046】
本発明の方法の第4のモードは、ブロック荷重推定である。このモードは、ブロッキング要素自体が支えることになる荷重を推定し、船舶の船体への障害の原因となる可能性のあるブロッキング要素上の望ましい荷重よりも高いと予測するために使用することもできる。
【0047】
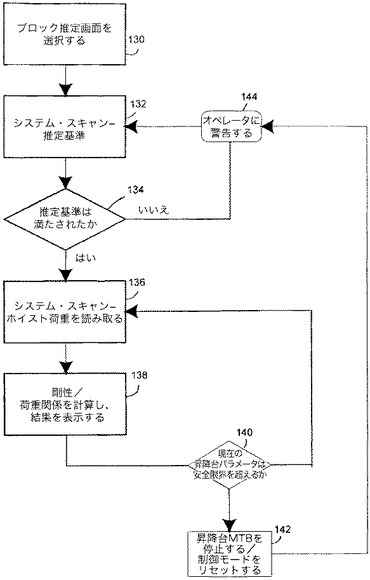
図10は、このモードのための論理フローチャートを示す。ステップ130で、オペレータは、上記の方法でブロック荷重推定画面を選択する。ステップ132で、システムは、各ホイスト上の自重値と現在の昇降台位置とを読み取り、スキャンを実行する。ステップ134で、システムは、ブロッキング推定基準に達したか否かを判定する。例えば、このモードは、昇降台が埠頭に固定されているなど、全てのドッキング動作中には使用不可能である。達しない場合、システムはステップ132に戻ることができ、基準に達するまで繰り返すことができ、基準に達した時にシステムはステップ136に移動する。ステップ136で、システムは、昇降台の移動中に比較する目的で、各ホイストに対する現在の自重示度数を記憶する。
【0048】
システムはステップ138に移り、そこで瞬間ホイスト荷重、ブロックの数/測位及び昇降台システムの剛性と荷重との間の周知の関係に基づいてブロック荷重を計算する。通常の吊り上げ動作中に、各MTBはブロッキングをセットさせる。これは、通常、重量の大部分を支える船舶の竜骨下に置かれた中心ブロックと、港に配置された一対のウイング・ブロックと、船舶の傾斜に対する支えを提供するための竜骨ブロックの右舷とを含む。ブロックの数/測位はこの正常な関係に基づくことができ、又はシステムは、上記のような不連続なブロッキング配置など、異なるブロッキング配置に関するデータ入力を、例えば各ブロックの数と測位とを入力することにより提供することができる。次いでシステムは、現在の昇降台パラメータのどれかが所定の安全基準を超えるか否かを判定する。超えない場合、システムはステップ136に戻り、吊り上げ動作が停止するか、安全パラメータを超えるまで、推定されたブロック積載を監視しながら、ステップ136から140を通して循環を続ける。安全パラメータを超えた場合、システムはステップ142に移り、そこで昇降台を停止し、制御モードをリセットし、オペレータに対する画像又は他の警告を提供する。
【0049】
本発明の方法の第5のモードは、メータ当たりトン数モードである。連接された船舶昇降機の昇降台のある種の基礎的な設計基準の1つは、昇降台に沿った最大分散荷重(MDL)の識別表示である。ホイスト積載力と対になったこの識別表示は、様々な保護トリップ・レベルの設定を推進する。メータ当たりトン数(TPM)モード及び表示は、MDLの図形表示を提供することができ、ホイスト荷重から計算することができる。連接された昇降台の構造的な応答に関する設計者独自の知識により、この計算を実行することができる。この表示の恩恵の1つには、移送システム荷重が、高いホイスト荷重でそれ自体を表明せず、したがって昇降台はホイスト荷重から導出された安全保護を提供しない、設計限界に近づくような状況における特別な昇降台保護の提供が含まれる。すなわち、荷重は個別のMTB基準の安全限界には近づかず、したがってホイスト過積載による警報をトリガしないが、いくつかのMTBにわたる荷重は昇降台の安全限界を超える場合がある。
【0050】
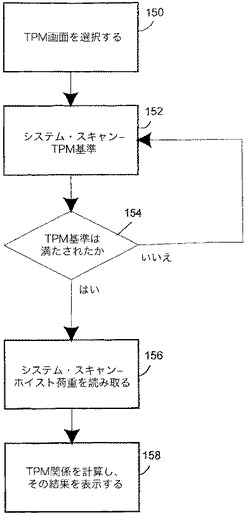
図11は、このモードの論理フローチャートを示す。ステップ150で、オペレータは、上記のような方法でTPM画面を選択する。ステップ152で、システムは、各ホイスト上の自重値と現在の昇降台位置とを読み取る。ステップ154で、システムは、TPM基準が満たされたか否かを判定する。満たされていない場合、システムはステップ152に戻り、動作が停止するか、又は基準が満たされるまで、ステップ152から154を通して循環する。基準が満たされた場合、ステップ156で、システムは、メータ当たりトン計算で使用されるべき、各ホイストに関する現在の自重示度数を記憶する。ステップ158で、システムは、TPMを計算し、その結果を表示する。TPMは推定なので、このモードは、ここでの結果表示後に停止することができる。しかしこのモードは、オペレータがこの状態を分析できるまで、TPMがある種の所定安全パラメータを超えた場合には、オペレータに警告し、昇降台を停止するために使用することもできる。その場合、論理フローチャートは、他のモードに関して上記で検討したような方法で続けることができる。
【0051】
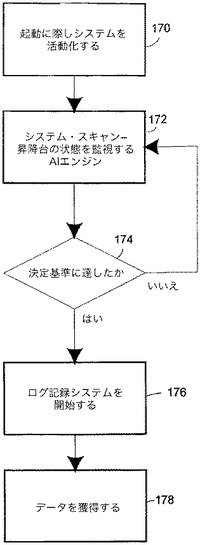
本発明の方法の第6のモードは、自動再生モードである。船舶を吊り上げる動作の分析において、特に吊り上げ動作中に問題が生じた場合には、吊り上げている最中に行われる一連の動作を点検することが有益な場合がある。これは、エラーが発生したか否か、またそのエラーがどのようにして発生したかを指摘することができ、またオペレータのためのトレーニング・ツールとして使用することもできる。このモードは、オペレータにより選択可能又は解除可能でないことが好ましい。そうではなく、船舶昇降制御システム起動の際に開始し、所望の長さのログを維持するために適切なメモリを割り当てて、所望の時間の長さだけ船舶昇降動作の実行ログを維持することができる。このモードは、異なるサブモードで動作することができる。第1のサブモードで、システム起動の際に、システムは、ある程度の時間にわたって、全ての船舶昇降動作の実行中ログ、又はすべての事前選択された動作のログを維持することができる。第2のサブモードで、システム起動の際に、システムは、データのログ記録を実行すべきことを示すいくつかの基準が満たされるまで、連続する監視(しかしログ記録でない)局面で実行することができる。
【0052】
図12は、この第2のサブモードの論理フローチャートを示す。ステップ170で、このモードは、システム起動の際に活動化される。ステップ172でシステム・スキャンが実行され、船舶昇降機の状態を監視するために人工知能エンジンを使用することができる。船舶昇降機の正常な動作中に、システムは、様々な吊り上げパラメータを連続的に監視する。ステップ174で、システムは、それらパラメータのどれかがデータのログ記録を開始すべきことを示しているか否かを判定する。示していない場合、システムはステップ172に戻り、システムがシャットダウンするか、又はデータがログ記録を開始すべきことを示すまでは、ステップ172から174を通して循環を続ける。データがログ記録を開始すべきことを示す場合、システムはステップ176に移り、そこでログ記録システムが開始され、次いでステップ178に移り、そこでデータが獲得され、永続メモリに記憶される。所望の船舶昇降機パラメータのデータは、所定の時間間隔でログ記録することができる。システムは、システムがシャットダウンするか、又はさらなる基準が満たされるまでは、データのログ記録を続けることができる。ログ記録されたデータは次いで、認証されたオペレータにより後でアクセスすることができる。監視され、ログ記録することのできるパラメータには、各ホイストへの荷重と、各ホイストに対するモータの現行の牽引と、各MTBの位置とが含まれる。
【0053】
上記の様々なモードは、様々な組合せで個別に又は同時に使用することができる。
【0054】
以上、本発明を、本明細書の「背景技術」の節で説明した船舶昇降機のタイプについて検討したが、その使用は、そのような船舶昇降機には限定されず、他の種類の船舶昇降機又は他の種類の吊り上げ機構により使用することができるということを理解されたい。
【0055】
本発明は、吊り上げ機構に対する制御システムと連動して、且つ/又はこれにより、活動化された際に自動的に動作することを目的とする。或いは、本発明は、吊り上げ機構に関する制御システムとは別に、しかし必要に応じて制御システムと連動して動作するように、別個のCPU/コントローラで実施することができる。好ましくはないが、本発明のあるステップは、手動で動作することができ、且つ/又は本発明のシステムによるクエリ及び/又は指示の際に動作することができる。本発明は、本発明の方法のステップの1つ又は複数を実施するためのシステムも含む。
【技術分野】
【0001】
本願は、参照によりその全体を本明細書に援用する2004年6月16日出願の米国特許出願第60/579,677号の優先権を主張する。
【0002】
本発明は、船舶昇降機に関し、より詳細には船舶昇降機の運転方法に関する。
【背景技術】
【0003】
船舶昇降機は、一般に、昇降台の反対側に接続された2列のホイストを含む。ホイストは、電力又は水力で駆動されたウィンチ又は水力ラムを含めて多くの種類があってよく、またワイヤ・ロープ又は鎖などを含む別の手段で昇降台に接続されてもよい。使用されるホイストの数とサイズとは、吊り上げられるべき荷重に応じて必要に応じて多様であってよい。典型的な船舶昇降機は、4〜110のホイストを使用する。
【0004】
船舶昇降機の昇降台は、固定であっても、又は本願の譲受人が供給するように、昇降台の部分が昇降台の他の部分に対して縦に移動することができるよう連接してもよい。本発明の譲受人により通常使用されるタイプの昇降台では、昇降台は、移動の指定範囲内で相互に連接することのできる複数の主要横ビーム(MTB)を含む。各MTBは、MTBの他端に接続された2つのホイストの間で支えられる。MTBは、それぞれのMTB間で相対的な移動を依然として可能にしながら、昇降台を形成するために周知の方法で接続される。状況によっては、昇降台は、より大きな船舶/大型船舶を持ち上げるために共同して動作するか、又は複数のより小さい船舶/大型船舶を独立して吊り上げるために相互に独立して動作することのできる複数のセクションとして構築することができる。
【0005】
本発明を使用することのできる従来技術の船舶昇降機の一例は、本発明の譲受人に譲渡され、本明細書で図1から図4に示す、米国特許第RE37,061号、「Method of Distributing Loads Generated Between A Ship And A Supporting Dry Dock(「船舶と支持乾ドック間で生成される荷重の分散方法」)」に記載されている。図1を参照すると、米国特許第4,087,979号に記載の種類の昇降台13は、埠頭10(図2)に対する縦移動について船舶9を支える。次に図2を参照すると、昇降台13は、埠頭10(図1)と12(図4)の対抗面の切欠き17内にその端部がある複数のMTB20を含む。ビーム20の端部は滑車18を担持している。
【0006】
ここではホイスト・ウィンチ19の形式で、複数の対抗するホイストの対が使用される。図4を参照されたい。各ホイスト・ウィンチ19は、それぞれの埠頭に固定され、滑車18と粗縦に整列したさらなる滑車21を支え、さらにウィンチ・ドラム29を含んでいる。図2及び3を参照されたい。ワイヤ・ロープ27は、一端がクレビス・ピンとしての役割も果たすロードセル25により固定されており、またホイスト・ウィンチ19の構造の端部に固定されている。ロープ27は滑車18及び21周囲に巻き付けられており、残りの端部は滑車18から出てウィンチ・ドラム29に接続される。各ウィンチ・ドラム29は、AC同期モータ33により、ドラム29端部にあるステップダウン・ギア配置35と鋸歯状の車輪37を介して駆動される。限定スイッチ41は、ビーム20が支えるホイスト・ウィンチ19と接続パッド43の構造に固定される。限定スイッチは事前設定されており、昇降台13が動作中にその所望の高さまで上がると、パッド43が限定スイッチ41に接触し、限定スイッチ41は次いで昇降台20の停止を有効にするように作動される。昇降台13の最大所望低位置を特定するために、システム内の装置(図示せず)が利用される。
【0007】
昇降台13とその関連する船舶9を持ち上げ、又は下ろすためのホイスト・ウィンチ19の動作中、調整回路28は、そのウィンチ19に関連するロードセル25から電気信号を受け取る。図4を参照されたい。各回路28からの出力は、コンピュータ/CPU47に送信される。コンピュータ47は、ホイスト・ウィンチ19の動作を停止し、又は可能にして、受信したデータを処理し、船舶昇降機制御パネルに制御信号を送信することができ、また例えば、感知されている荷重、またウィンチ・モータ33に消費される電流、昇降/下降中の大型船舶の重量、及びシステムの他の特徴など、ホイスト・ウィンチ19の動作性能を考慮する情報を表示するためにさらなる信号を視覚表示ユニット49に送信することができる。
【0008】
図5は、ホイスト・ウィンチ19にかかる特定船舶の重量分散をヒストグラムと数値双方の形式で表示する。対向するウィンチ・ステーション1A及び1Bには、それぞれに73.8トンの荷重がかかる。ステーション4A及び4Bには、それぞれに256トンの荷重がかかり、ステーション6A及び6Bには、それぞれに72トンの荷重がかかる。0より上で示された重量は、船舶に関する。ヒストグラムの0の線より下の突出は、程度では同一であり、昇降台の一定の重量に相当する。
【0009】
上記説明は、クレビス・ピン形式によるロードセル25の使用を開示する。しかしロードセルの他の形式は、動作中にホイスト・ウィンチ19にかかる荷重のロード・パスのどこにでも使用し、配置することができる。したがって、一例として、ロードセルを、ホイスト・ウィンチ滑車21の支持構造51上に、又はホイスト・ウィンチ19と埠頭10及び12の間の53に、又はクレビス・ピン支持具に配置することができる。すなわち、適切に適応された形状のロードセル上に支えられた通常のクレビス・ピン25を使用して配置することができる。
【0010】
ATLAS(登録商標)という名称を付した、本願の譲受人により供給される周知の船舶昇降制御システムは、船舶昇降オペレータに船舶昇降動作情報を提供する。例えば、それは、オペレータが入力したデータから計算された大型船舶の有望な分散された荷重を示す、計算された荷重分散画面を含む。分散された荷重が最大設計分散荷重より上の場合、モニタは、その大型船舶が船舶昇降機に過積載になる可能性があり、ドック入りすべきでないという警報を表示する。警報が示された場合、ブロック上の大型船舶荷重の分散は、重心を積載されたブロッキングの中心線付近に移動することにより変更することができる。次のドッキング・パラメータは、オペレータにより入力される。
W=船舶の荷重
LK=竜骨を支えるブロックの長さ
A=第1のブロックから岸壁の防水壁までの、メートル(フィート)による距離
LCG=船舶の重心から岸壁の防水壁までの距離
設定限界は、ディスプレイのウィンドウ内に、値を入力するための入力設定ボックスと共に示される。ディスプレイは、ドック入りすべき大型船舶に対する計算された荷重分散を示す。
【0011】
ATLAS(登録商標)システムは、昇降台上の大型船舶の縦方向と横方向の重心と、各主要横ビーム上の一隻分の積荷量とに関する情報を提供する重心モードも含む。
【0012】
この情報は、不正確な大型船舶の測位など、いかなるドック入りの異常でも特定するためにオペレータが使用することができる。
【0013】
米国特許第RE36,971号、「Method Of Determining And Analyzing A Ship’s Weight(船舶重量を特定し分析する方法)」と、第RE37,061号、「Method of Distributing Loads Generated Between A Ship And A Supporting Dry Dock(船舶と支える乾ドックの間で生成される荷重を分散する方法)」は、どちらも船舶昇降機を操作する方法を記載している。
【0014】
すべて船舶昇降機に関しており、本発明の譲受人又は協力企業に譲渡された、米国特許第3,073,125号、4,087,979号、RE36,971号、及びRE37,061号を参照により本明細書に援用する。
【発明の概要】
【0015】
昇降台は、少なくとも1つのホイストによりそれぞれが支えられる複数の主要横ビーム(「MTB」)を含む。
【0016】
一形態では、昇降台上で吊り上げられるべきアイテムの荷重を支えるために、昇降台と複数の不規則に間隔を空けたブロッキング機構とを有する吊り上げ機構を操作する方法は、昇降台に関するブロッキング機構のそれぞれに関する位置データを収集すること、吊り上げるべきアイテムの質量を推定すること、及び吊り上げるべきアイテムの縦方向の重心を推定することを含む。不規則に間隔を空けたブロッキング機構の位置と、吊り上げるべきアイテムの質量及び縦方向の重心とに基づく昇降台上の推定された積載曲線が計算され、推定された積載曲線が出力される。
【0017】
一形態では、昇降台、昇降台を吊り上げるための複数のホイスト、及び昇降台上で吊り上げるべきアイテムの荷重を支えるための複数のブロッキング機構を有する吊り上げ機構を操作する方法は、ブロッキング機構それぞれに関する位置データを収集すること、及び各ホイスト上の荷重を読み取ることを含む。各ブロッキング機構の位置と、各ホイスト上の荷重と、昇降台の剛性とその荷重との間の所定の関係とに基づく各ブロッキング機構上の荷重が計算され、各ブロッキング機構上の計算された荷重が出力される。
【0018】
一形態では、昇降台と、昇降台を吊り上げるための複数のホイストと、昇降台上で吊り上げるべきアイテムの荷重を支えるための複数のブロッキング機構とを有する吊り上げ機構を操作する方法は、ブロッキング機構それぞれに関する位置データを収集すること、及び各ホイスト上の荷重を読み取ることを含む。各ホイスト上の荷重と、各ブロッキング機構の測位と、昇降台の長さとに基づく昇降台上の推定されたメータ当たりトン積載が計算され、推定されたメータ当たりトン計算値が出力される。
【0019】
一形態では、吊り上げ機構を操作する方法は、吊り上げ機構の始動の際に吊り上げ機構の動作の監視を活動化すること、吊り上げ機構のある動作パラメータを監視すること、動作パラメータを所定のトリガ・パラメータと比較すること、及びトリガ・パラメータのいずれかに達した際に動作パラメータをログ記録することを含む。
【0020】
一形態では、吊り上げ機構を操作する方法は、吊り上げ機構制御を活動化する際に監視システムを活動化すること、監視すべきシステム・パラメータのセットを選択すること、及び少なくともあるシステム・パラメータに対するトリガ基準のセットを選択することを含む。次いでシステム・パラメータは、トリガ基準のいずれかに達するまで監視され、次いでシステム・パラメータは、トリガ基準のいずれかに一度達すると永続メモリにログ記録される。
【0021】
背景技術の節に記載の問題点に対する解決策を提供することが、本発明の目的である。
【0022】
本明細書に記載の特徴及び/又は利点を提供する吊り上げ機構を操作する1つ又は複数の方法を提供することが、本発明の目的である。
【図面の簡単な説明】
【0023】
【図1】(従来技術)船舶昇降機の略式側面図である。
【図2】(従来技術)図1の線2から2の部分的略図である。
【図3】(従来技術)図1の船舶昇降機のホイスト・ウィンチの絵図である。
【図4】(従来技術)図1の船舶昇降機の部分的平面図である。
【図5】(従来技術)図1の船舶昇降機上の船舶の重量分散の表示である。
【図6】本発明の第1のモードの論理フローチャートである。
【図7】船舶昇降機と各ホイストの荷重との略図である。
【図8】本発明の第2のモードの論理フローチャートである。
【図9】本発明の第3のモードの論理フローチャートである。
【図10】本発明の第4のモードの論理フローチャートである。
【図11】本発明の第5のモードの論理フローチャートである。
【図12】本発明の第6のモードの論理フローチャートである。
【発明を実施するための形態】
【0024】
一例として、また添付の図面を参照して、本発明を説明する。
本発明は、船舶昇降機のいくつかの運転方法を含む。第1は、自動微動モードである。船舶を吊り上げる場合、昇降台の各主要横ビーム上の荷重は、吊り上げられるべき船舶の形状、船舶の積載、船舶と昇降台の間のブロッキングなどを含めた様々な要因により、通常は均一ではない。ある状況下において、1つ又は複数のMTBは、他のMTBに関して望まれるよりも高い荷重又は低い荷重を支えることができる。MTBは相互に連接されるので、それらMTBが支えている荷重に影響を与えるために、個々の横ビームに対して規定された安全範囲内で様々な高度調整を行うことができる。昇降台の他のMTBに関して個々のMTBを上げたり下げたりすることを、「微動」と称する。上記のRE37,061、「船舶と支持乾ドック間で生成される荷重の分散方法」は、昇降台のMTB間で荷重を移すための、従来技術によるMTBの微動方法を開示する。
【0025】
一例として、特定船舶の船体の形状と船舶と昇降台の間のブロッキングの構成/配置により、1つのMTBは隣接MTBよりも遥かに高い荷重を支えていると分かる場合がある。これは、それ以外のMTBと昇降台全体自体は依然として安全限界内にあっても、そのMTB上の荷重が安全限界を超過する状況をもたらす場合がある。さらに、荷重の多いMTB上に対するこれと同じ荷重は、船舶の船体の局所的に支えられた領域にも加えられるので、船体上で局在化した積載が安全限界を超過した場合は船舶の船体自体に損傷が発生する可能性がある。
【0026】
別の実施形態では、1つのMTBが隣接MTBよりも遥かに軽い荷重を支えていることが分かる場合がある。そのような場合、船舶昇降機がその安全運転限界付近まで船舶を吊り上げる場合は特に、より荷重の重い隣接MTBからより荷重の軽いMTBに荷重を移すことが望ましい場合がある。
【0027】
第1の例では、より荷重の重いMTB上の荷重は、そのMTBを他のMTBよりも低くし、したがって荷重の重いMTBからその荷重の一部をその昇降台の他のMTBに移すことにより低減することができる。第2の例では、荷重の軽いMTB上の荷重は、そのMTBを他のMTBよりも高くし、したがって他のより荷重の重いMTBからその荷重の一部をより荷重の軽いMTBに移すことにより、増加させることができる。昇降台の個々のMTBの微動は上記のように多大な利益を有する場合があるが、技術と知識のあるオペレータが実行しない場合には、多大のリスクを与える場合もある。例えば、高さの差異により、複数の隣接MTBがそれらの連接された接合部を引き離し、それぞれが分離されることになる前に、個別のMTBは隣接MTBに対してそれだけ高めたり低めたりすることしかできない。これは、昇降台上の有害な状況の原因となる。さらに、近くに配置されたMTB上の荷重はある程度相関するので、1つのMTBが上又は下に移動しすぎると、そのMTB又は他のMTBの過積載が生じる場合がある。したがって、微動プロセスは、厳しいガイドラインに準拠することによってのみ、安全に実行することができる。
【0028】
図6は、本発明の自動微動モードの操作方法を示す。吊り上げ動作が開始される前に、昇降台は、各MTB上の基礎荷重(すなわち、昇降台とブロッキングの荷重)が確認され、昇降台が、各MTBの高さを相互に平均化するために平均化手順を通過する、予備手順を通過する。一度その予備手順が完了すると、実際の吊り上げ動作を開始することができ、船舶昇降は自動微動モードに入ることができる。ステップ60で、船舶昇降制御ディスプレイの自動微動画面が選択される。これは船舶昇降オペレータにより手動で選択することができ(例えば、キーボード、マウス又はタッチパッドにより)、又は微動が有利であることを示すあるパラメータを船舶昇降制御システムが検出した場合に自動的に選択することができる。
【0029】
ステップ62で、自動微動が望ましいか否かを判定するためにシステム・スキャンが実行される。これは、各MTB上の「自重」を感知し分析することを特に必然的に伴う。この自重は、船舶自体の実際の荷重を提供するために基礎荷重を減じたMTB(船舶を含めて)上の全荷重である。システムは、昇降台と個々のMTBの現在位置も読み取ることができる。これは、実際の距離測定を通して、又は例えば予備平均化動作から電気ウィンチ・ホイスト19が導出された時間量に基づいて計算された距離で実行することができる。例えば、ホイスト・ウィンチ19が分速25mmでMTBを移動させ、そのホイスト・ウィンチが平均化動作から3分間運転された場合、MTBは75mm移動したと計算することができる。
【0030】
次いで、個別のMTB上の荷重が他のMTB上の荷重よりも所定量だけ重いか軽いか、且つ/又は個別のMTB上の荷重がその安全限界に近づいているか否かが判定される。この要因は、実際の荷重の数字及び/又は選択されたMTB間の積載比率の点で考慮することができる。ディスプレイ49は、例えば図5に示すような各MTB上の積載を表示することが好ましい。このステップ中、船舶の船首又は船尾付近に置かれ、他のMTBよりも遥かに軽い積載を有することが期待されるMTBは、任意に考慮から省略することができる。ステップ62で任意に考慮することのできる別の基準は、微動候補である場合のあるMTBが依然として安全高さ調整範囲内にあるか否かである。これは、以前に微動が実行されたことがあるか否かを考慮に入れることができる。他の基準も任意に考慮することができる。
【0031】
ステップ64で、自動微動が勧められたことを示す自動微動基準が満たされるか否かが判定される。満たされない場合、ステップ66でディスプレイ49により、又は他の信号によりオペレータに警告することができ、方法はステップ62に戻り、自動微動基準が満たされたと判定されるまで、又はプログラムが停止するまで循環を続ける。基準が満たされた場合、ステップ68で、微動されるべきMTBが選択される。これは、システムが、基準に基づいてどのMTBを自動的に微動すべきかを示唆することにより自動的に行うことができる。このような場合、方法は、下記の残りのステップを通して自動的に続行するか、又は先に進む前にオペレータに認証を要求することができる。或いは、オペレータは、微動すべきMTBを選択することができる。
【0032】
ステップ70で、システムは、各MTBの現在の自重示度数を収集し、記憶するが、また各MTBの現在位置を収集し、記憶することもできる。ステップ72で、システムは、選択されたMTBを微動することのできる安全パラメータを計算する。1つの要因は、そのMTBを微動することのできる最大距離である。これは、MTBのどれだけの移動が許可されるかを特定するために、(他のMTBに対する)MTBの設計された許容可能な移動を(他のMTBに対する)MTBの実際の位置と比較することにより計算することができる。別の要因は、システムに事前プログラムすることができ、又はデータ・テーブル/ファイル全体にアクセスすることのできる、MTB上の最大許可荷重である。別の要因は、微動後のMTB上の望まれる荷重であってよい。ステップ74で、選択されたMTBの微動が開始される。これは、他のMTBを静止させておきながら、関連付けられたホイスト・ウィンチ19の動作を通じて個別のMTBの移動を許可する、システムの特別な制御モードに入ることにより行うことができる。
【0033】
ステップ76で、システムは、各MTB上の荷重と各MTBの位置とを含めて現在の昇降台パラメータを収集する。これは、MTBの初期荷重と移動量に基づいて、荷重予測要因を使用して荷重を推定することもできる。ステップ78では、ステップ76で収集されたデータが、ステップ72で確立された安全パラメータと比較され、その安全パラメータに達したか又は超えたかが判定される。システムがこのモード中はいかなる危険な状況をも作り出さないことを保証するために、ステップ72で特定された安全要因に、ステップ74から78で実際の安全動作の限界を超えないように、組み込まれた安全マージンを含めることができる。或いは、ステップ78は、現在の昇降台パラメータの1つ又は複数が、ステップ72で特定された安全パラメータの1つ又は複数のある部分を超えたと判断された時に、MTBの移動を停止すべきことを信号で伝える比較モードで動作することができる。例えばステップ78は、MTBの実際の移動がステップ72で特定された許可された移動の90%を超えた時にMTBの移動を停止すべきことを信号で伝えることができる。他の比較要因も使用することができる。
【0034】
安全パラメータを超えていない場合、プロセスはステップ76に戻り、ステップ76と78を通して循環を続行する。そして、プロセスがステップ80に移動して、昇降台が停止され制御モードがリセットされる時点である、安全パラメータの1つに達したか超えたと判定されるまで、又は望ましい荷重移動が達成されるまでは、船舶昇降のステータスを連続して監視する。次いでステップ66でオペレータにこのことが警告され、プロセスはステップ62に戻る。
【0035】
MTBの他端を支えるホイストを静止させておきながら、MTBの一端を支えるホイストを駆動することにより、個別のMTBの他端で荷重を再分散するために、このモードを上記と類似の方法で使用することができる。
【0036】
このモード並びに下記で説明する他のモードは、船舶昇降制御システムにより動作させることができる。この船舶昇降制御システムは、上記の船舶昇降機において、コンピュータ/CPU 47とディスプレイ49とを含む。これはまた、プログラム可能な論理コントローラなど、他のタイプのコントローラを使用することができる。
【0037】
本発明の方法の第2のモードは、荷重バランス・モードである。これは上記の自動微動モードに類似しているが、単一のMTBを微動する代わりに、他のMTBと比較して不均衡な荷重を搬送する複数群のMTBが一斉に微動される。船舶昇降機の略図である図7を参照されたい。図示するように、ホイストA4、A5、B4及びB5の一群は、他のホイストよりも不均衡に高い荷重を搬送している。このような状況では、ホイスト/MTBのすべての間で荷重をより均一に均衡をとるように、荷重を再分散することが望ましい場合がある。この場合、選択された一群は、その荷重の一部を他のMTBに移すために、他のMTBに対して低められることが望ましい。
【0038】
ホイスト/MTBの様々な群の異なる計算と分析を使用することができるが、このモードは自動微動モードと類似して動作する。図8は、本発明の荷重バランス・モードを操作する方法を示す。吊り上げ動作を開始する前に、昇降台は、上記の自動微動モードと同様に予備手順を通過する。一度予備手順が完了すると、実際の吊り上げ動作を開始することができ、船舶昇降機は荷重バランス・モードに入ることができる。ステップ90で、船舶昇降制御ディスプレイの荷重バランス画面が選択される。これは船舶昇降制御オペレータにより手動で選択することができ、又は船舶昇降制御システムが、荷重均衡が有利なことを示すある種のパラメータを検出した時に自動的に選択することができる。
【0039】
ステップ92で、荷重均衡が望ましいか否かを判定するためにシステム・スキャンが実行される。これは、各MTB上の自重を感知し分析すること、並びに荷重確実MTBをグループ化し、そのような荷重を他の複数群のMTBの荷重と比較することを特に必然的に伴う。システムは、昇降台と個々のMTBの現在位置も読み取ることができる。次いで、一群のMTB上の荷重が、他のMTB上の荷重よりも所定量だけ重いか軽いか、且つ/又は一群のMTB上の荷重が、安全限界に接近しているか否かが判定される。このステップ中、船舶の船首又は船尾付近に置かれ、他のMTBよりも遥かに軽い積載を有することが期待されるMTBは、任意に考慮から省略することができる。ステップ72で任意に考慮することのできる別の基準は、微動候補である場合のある一群のMTBが依然として安全高さ調整範囲内にあるか否かである。これは、以前に微動が実行されたことがあるか否かを考慮に入れることができる。他の基準も任意に考慮することができる。
【0040】
ステップ94で、荷重均衡が勧められたことを示す荷重均衡基準が満たされるか否かが判定される。満たされない場合、ステップ96でディスプレイ49により、又は他の信号によりオペレータに警告することができ、方法はステップ92に戻り、荷重均衡基準が満たされたと判定されるまで、又はプログラムが停止するまで循環を続ける。基準が満たされた場合、ステップ98で、微動されるべき一群のMTB(ホイスト)が選択される。これは、システムが、基準に基づいてどの群のMTBを自動的に微動すべきかを示唆することにより自動的に行うことができる。このような場合、方法は、下記の残りのステップを通して自動的に続行するか、又は先に進む前にオペレータに認証を要求することができる。或いは、オペレータは、微動すべき一群のMTBを選択することができる。
【0041】
ステップ100で、システムは、各MTBの現在の自重示度数を収集し、記憶するが、また各MTBの現在位置を収集し、記憶することもできる。ステップ102で、システムは、選択された一群のMTBを微動することのできる安全パラメータを計算する。1つの要因は、そのMTBを微動することのできる最大距離である。これは、選択された一群のMTBのどれだけの移動が許可されるかを特定するために、(他のMTBに対する)選択された一群のMTBの設計された許容可能な移動を、(他のMTBに対する)選択された一群のMTBの実際の位置と比較することにより計算することができる。別の要因は、システムに事前プログラムすることができ、又はデータ・テーブル/ファイルを通じてアクセスすることのできる、選択された数群のMTB上の最大許可荷重である。別の要因は、微動後の選択された数群のMTB上の望まれる荷重であってよい。ステップ104で、選択された数群のMTBの微動が開始される。これは、他のMTBを静止させておきながら、関連付けられたホイスト・ウィンチ19の動作を通じて一群のMTBの移動を許可する、システムの特別な制御モードに入ることにより行うことができる。
【0042】
ステップ106で、システムは、各MTB上の荷重と各MTBの位置とを含めて現在の昇降台パラメータを収集する。これは、MTBの初期荷重と移動量に基づいて、荷重予測要因を使用して荷重を推定することもできる。ステップ108では、自動微動モードに関して上記で説明したのと同じ方法で、ステップ106で収集されたデータが、ステップ102で確立された安全パラメータと比較され、その安全パラメータに達したか又は超えたかが判定される。安全パラメータを超えていない場合、プロセスはステップ106に戻り、ステップ106と108を通して循環を続行する。そして、プロセスがステップ110に移動して、昇降台が停止され制御モードがリセットされる時点である、安全パラメータの1つに達したか超えたと判定されるまで、船舶昇降機のステータスを連続して監視する。次いでステップ96でオペレータにこのことが警告され、プロセスはステップ92に戻る。
【0043】
本発明の方法の第3のモードは不連続なブロッキング・モードである。船舶と昇降台との間の接続装置は移送システムである。それぞれの別個のクレードルは、昇降台上の大型船舶を支える木で上を覆った翼状のものの付いたブロックを有する。この移送システムには、大型船舶/積載フォーム又は動作可能な要件に適合するために規則的な間隔で空間が空いている。既存のATLAS(登録商標)システムは、オペレータが様々なドッキング・パラメータを入力することを可能にするために、上記のように計算された荷重分散画面を提供するが、均一の連続したブロッキング、すなわち各ブロックの対の間の固定された均一の距離を前提とする。次いでシステムは、台形積載曲線を前提とする荷重分散を計算し表示する。
【0044】
場合によっては、船体に特色又は船体の一部に損傷を有する大型船舶をドックに入れることが必要な場合がある。この状態は、規則的なブロッキング間隔の中断、すなわちブロッキング配置が不連続であるか又は遮られることを決定する場合がある。これは、結果として生じた台形積載曲線の大きさと分散に多大な影響がある場合がある。この第3のモードは、オペレータが、ブロッキングの提案された配置がこの船舶を適切に支えるために十分か否かを判定するために積載パラメータと積載曲線が正確に計算され、分析されるように、不連続なブロッキングの詳細を入力することを可能にする。
【0045】
図9は、このモードのための論理フローチャートを示す。ステップ120で、オペレータは、上記の方法でブロッキング画面を選択する。ステップ122で、システムは、提案された特定のブロッキング配置に関してオペレータからブロッキング情報を収集する。これは、特に、ブロッキング配置の縦方向のスタート位置、ブロッキング・クレードル・トレインのギャップを含むブロック・セット間の間隔、大型船舶の質量と推定される縦方向重心とを含むことができる。次いでシステムは、ステップ124でこの情報に基づいて昇降台積載を計算し、提案されたブロッキング配置のためにステップ126で推定された1つ又は複数の積載曲線を図面により表示する。これは、提案されたブロッキングが船舶を適切に支えるか否か、又はブロッキング配置に対して調整が必要か否かを判定するために、オペレータが分析することができる。システムは、推定された積載曲線を自動的に分析し、その推定された積載が安全な動作限界をいかなる方法でも超える場合は画像又は他の警告を提供するようにも構成することができる。そのような場合、このモードは、安全な動作限界内にある推定された積載曲線を提供する修正されたブロッキング配置を自動的に提案するように構成することもできる。
【0046】
本発明の方法の第4のモードは、ブロック荷重推定である。このモードは、ブロッキング要素自体が支えることになる荷重を推定し、船舶の船体への障害の原因となる可能性のあるブロッキング要素上の望ましい荷重よりも高いと予測するために使用することもできる。
【0047】
図10は、このモードのための論理フローチャートを示す。ステップ130で、オペレータは、上記の方法でブロック荷重推定画面を選択する。ステップ132で、システムは、各ホイスト上の自重値と現在の昇降台位置とを読み取り、スキャンを実行する。ステップ134で、システムは、ブロッキング推定基準に達したか否かを判定する。例えば、このモードは、昇降台が埠頭に固定されているなど、全てのドッキング動作中には使用不可能である。達しない場合、システムはステップ132に戻ることができ、基準に達するまで繰り返すことができ、基準に達した時にシステムはステップ136に移動する。ステップ136で、システムは、昇降台の移動中に比較する目的で、各ホイストに対する現在の自重示度数を記憶する。
【0048】
システムはステップ138に移り、そこで瞬間ホイスト荷重、ブロックの数/測位及び昇降台システムの剛性と荷重との間の周知の関係に基づいてブロック荷重を計算する。通常の吊り上げ動作中に、各MTBはブロッキングをセットさせる。これは、通常、重量の大部分を支える船舶の竜骨下に置かれた中心ブロックと、港に配置された一対のウイング・ブロックと、船舶の傾斜に対する支えを提供するための竜骨ブロックの右舷とを含む。ブロックの数/測位はこの正常な関係に基づくことができ、又はシステムは、上記のような不連続なブロッキング配置など、異なるブロッキング配置に関するデータ入力を、例えば各ブロックの数と測位とを入力することにより提供することができる。次いでシステムは、現在の昇降台パラメータのどれかが所定の安全基準を超えるか否かを判定する。超えない場合、システムはステップ136に戻り、吊り上げ動作が停止するか、安全パラメータを超えるまで、推定されたブロック積載を監視しながら、ステップ136から140を通して循環を続ける。安全パラメータを超えた場合、システムはステップ142に移り、そこで昇降台を停止し、制御モードをリセットし、オペレータに対する画像又は他の警告を提供する。
【0049】
本発明の方法の第5のモードは、メータ当たりトン数モードである。連接された船舶昇降機の昇降台のある種の基礎的な設計基準の1つは、昇降台に沿った最大分散荷重(MDL)の識別表示である。ホイスト積載力と対になったこの識別表示は、様々な保護トリップ・レベルの設定を推進する。メータ当たりトン数(TPM)モード及び表示は、MDLの図形表示を提供することができ、ホイスト荷重から計算することができる。連接された昇降台の構造的な応答に関する設計者独自の知識により、この計算を実行することができる。この表示の恩恵の1つには、移送システム荷重が、高いホイスト荷重でそれ自体を表明せず、したがって昇降台はホイスト荷重から導出された安全保護を提供しない、設計限界に近づくような状況における特別な昇降台保護の提供が含まれる。すなわち、荷重は個別のMTB基準の安全限界には近づかず、したがってホイスト過積載による警報をトリガしないが、いくつかのMTBにわたる荷重は昇降台の安全限界を超える場合がある。
【0050】
図11は、このモードの論理フローチャートを示す。ステップ150で、オペレータは、上記のような方法でTPM画面を選択する。ステップ152で、システムは、各ホイスト上の自重値と現在の昇降台位置とを読み取る。ステップ154で、システムは、TPM基準が満たされたか否かを判定する。満たされていない場合、システムはステップ152に戻り、動作が停止するか、又は基準が満たされるまで、ステップ152から154を通して循環する。基準が満たされた場合、ステップ156で、システムは、メータ当たりトン計算で使用されるべき、各ホイストに関する現在の自重示度数を記憶する。ステップ158で、システムは、TPMを計算し、その結果を表示する。TPMは推定なので、このモードは、ここでの結果表示後に停止することができる。しかしこのモードは、オペレータがこの状態を分析できるまで、TPMがある種の所定安全パラメータを超えた場合には、オペレータに警告し、昇降台を停止するために使用することもできる。その場合、論理フローチャートは、他のモードに関して上記で検討したような方法で続けることができる。
【0051】
本発明の方法の第6のモードは、自動再生モードである。船舶を吊り上げる動作の分析において、特に吊り上げ動作中に問題が生じた場合には、吊り上げている最中に行われる一連の動作を点検することが有益な場合がある。これは、エラーが発生したか否か、またそのエラーがどのようにして発生したかを指摘することができ、またオペレータのためのトレーニング・ツールとして使用することもできる。このモードは、オペレータにより選択可能又は解除可能でないことが好ましい。そうではなく、船舶昇降制御システム起動の際に開始し、所望の長さのログを維持するために適切なメモリを割り当てて、所望の時間の長さだけ船舶昇降動作の実行ログを維持することができる。このモードは、異なるサブモードで動作することができる。第1のサブモードで、システム起動の際に、システムは、ある程度の時間にわたって、全ての船舶昇降動作の実行中ログ、又はすべての事前選択された動作のログを維持することができる。第2のサブモードで、システム起動の際に、システムは、データのログ記録を実行すべきことを示すいくつかの基準が満たされるまで、連続する監視(しかしログ記録でない)局面で実行することができる。
【0052】
図12は、この第2のサブモードの論理フローチャートを示す。ステップ170で、このモードは、システム起動の際に活動化される。ステップ172でシステム・スキャンが実行され、船舶昇降機の状態を監視するために人工知能エンジンを使用することができる。船舶昇降機の正常な動作中に、システムは、様々な吊り上げパラメータを連続的に監視する。ステップ174で、システムは、それらパラメータのどれかがデータのログ記録を開始すべきことを示しているか否かを判定する。示していない場合、システムはステップ172に戻り、システムがシャットダウンするか、又はデータがログ記録を開始すべきことを示すまでは、ステップ172から174を通して循環を続ける。データがログ記録を開始すべきことを示す場合、システムはステップ176に移り、そこでログ記録システムが開始され、次いでステップ178に移り、そこでデータが獲得され、永続メモリに記憶される。所望の船舶昇降機パラメータのデータは、所定の時間間隔でログ記録することができる。システムは、システムがシャットダウンするか、又はさらなる基準が満たされるまでは、データのログ記録を続けることができる。ログ記録されたデータは次いで、認証されたオペレータにより後でアクセスすることができる。監視され、ログ記録することのできるパラメータには、各ホイストへの荷重と、各ホイストに対するモータの現行の牽引と、各MTBの位置とが含まれる。
【0053】
上記の様々なモードは、様々な組合せで個別に又は同時に使用することができる。
【0054】
以上、本発明を、本明細書の「背景技術」の節で説明した船舶昇降機のタイプについて検討したが、その使用は、そのような船舶昇降機には限定されず、他の種類の船舶昇降機又は他の種類の吊り上げ機構により使用することができるということを理解されたい。
【0055】
本発明は、吊り上げ機構に対する制御システムと連動して、且つ/又はこれにより、活動化された際に自動的に動作することを目的とする。或いは、本発明は、吊り上げ機構に関する制御システムとは別に、しかし必要に応じて制御システムと連動して動作するように、別個のCPU/コントローラで実施することができる。好ましくはないが、本発明のあるステップは、手動で動作することができ、且つ/又は本発明のシステムによるクエリ及び/又は指示の際に動作することができる。本発明は、本発明の方法のステップの1つ又は複数を実施するためのシステムも含む。
【特許請求の範囲】
【請求項1】
昇降台と、前記昇降台上で吊り上げられるべきアイテムの荷重を支えるための複数の不規則に間隔の開いたブロッキング機構とを有する吊り上げ機構を操作する方法であって、
前記昇降台に対する前記ブロッキング機構のそれぞれに関する位置データを収集すること、
吊り上げられるべき前記アイテムの質量を推定すること、
吊り上げられるべき前記アイテムの縦方向の重心を推定すること、
前記不規則に間隔の開いたブロッキング機構の前記位置と、前記質量と、吊り上げられるべき前記アイテムの縦方向の重心とに基づいて前記昇降台上の推定された積載曲線を計算すること、そして
前記推定された積載曲線を出力することを含む方法。
【請求項2】
前記推定された積載曲線が所定パラメータを超えた場合に警報を提供することをさらに含む請求項1に記載の方法。
【請求項3】
前記推定された積載曲線が所定パラメータを超えた場合、前記所定パラメータ内に入る新しく推定された積載曲線を提供する前記ブロッキング機構に対して改定された間隔を空けた配列を示唆する請求項1に記載の方法。
【請求項4】
昇降台と、前記昇降台を吊り上げるための複数のホイストと、前記昇降台上で吊り上げられるべきアイテムの荷重を支えるための複数のブロッキング機構とを有する吊り上げ機構を操作する方法であって、
前記ブロッキング機構のそれぞれに関する位置データを収集すること、
各ホイスト上の荷重を読み取ること、
各ブロッキング機構の前記位置と各ホイスト上の前記荷重と前記昇降台の剛性とその荷重との間の所定の関係とに基づいて各ブロッキング機構上の荷重を計算すること、そして
各ブロッキング機構上の前記計算された荷重を出力することを含む方法。
【請求項5】
各ブロッキング機構上の前記計算された荷重を所定パラメータと比較すること、及びいずれかのブロッキング機構上の前記計算された荷重が前記所定パラメータを超えた場合に警報を提供することをさらに含む請求項4に記載の方法。
【請求項6】
各ブロッキング機構上の前記計算された荷重を所定パラメータと比較すること、及びいずれかのブロッキング機構上の前記計算された荷重が前記所定パラメータを超えた場合に吊り上げ動作を停止することをさらに含む請求項4に記載の方法。
【請求項7】
昇降台と、前記昇降台を吊り上げるための複数のホイストと、前記昇降台上で吊り上げられるべきアイテムの荷重を支えるための複数のブロッキング機構とを有する吊り上げ機構を操作する方法であって、
前記ブロッキング機構のそれぞれに関する位置データを収集すること、
各ホイスト上の荷重を読み取ること、
各ホイスト上の前記荷重と各ブロッキング機構の前記測位と前記昇降台の長さとに基づいて、前記昇降台上の推定されたメータ当たりトン積載を計算すること、そして
前記推定されたメータ当たりトン計算値を出力することを含む方法。
【請求項8】
前記推定されたメータ当たりトン積載を所定パラメータと比較すること、及び前記推定されたメータ当たりトン積載が前記所定パラメータを超えた場合に警報を提供することをさらに含む請求項7に記載の方法。
【請求項9】
前記推定されたメータ当たりトンを所定パラメータと比較すること、及び前記推定されたメータ当たりトンが前記所定パラメータを超えた場合に吊り上げ動作を停止することをさらに含む請求項7に記載の方法。
【請求項10】
吊り上げ機構を操作する方法であって、
前記吊り上げ機構の始動の際に前記吊り上げ機構の監視動作を活動化すること、
前記吊り上げ機構のある動作パラメータを監視すること、
前記動作パラメータを所定のトリガ・パラメータと比較すること、そして
前記トリガ・パラメータのいずれかに達した際に前記動作パラメータをログ記録することを含む方法。
【請求項11】
監視される前記動作パラメータは、前記吊り上げ機構の各ホイスト上の荷重と、各ホイストのモータの現行牽引と、前記ホイストの昇降台の各主要横ビームの位置とを含む請求項10に記載の方法。
【請求項12】
吊り上げ機構を操作する方法であって、
前記吊り上げ機構制御を活動化する際に監視システムを活動化すること、
モニタに対してシステム・パラメータのセットを選択すること、
少なくともある前記システム・パラメータに対するトリガ基準のセットを選択すること、
前記トリガ基準のいずれかに達するまで前記システム・パラメータを監視すること、そして
前記トリガ基準のいずれかに一度達すると、前記システム・パラメータを永続メモリにログ記録することを含む方法。
【請求項1】
昇降台と、前記昇降台上で吊り上げられるべきアイテムの荷重を支えるための複数の不規則に間隔の開いたブロッキング機構とを有する吊り上げ機構を操作する方法であって、
前記昇降台に対する前記ブロッキング機構のそれぞれに関する位置データを収集すること、
吊り上げられるべき前記アイテムの質量を推定すること、
吊り上げられるべき前記アイテムの縦方向の重心を推定すること、
前記不規則に間隔の開いたブロッキング機構の前記位置と、前記質量と、吊り上げられるべき前記アイテムの縦方向の重心とに基づいて前記昇降台上の推定された積載曲線を計算すること、そして
前記推定された積載曲線を出力することを含む方法。
【請求項2】
前記推定された積載曲線が所定パラメータを超えた場合に警報を提供することをさらに含む請求項1に記載の方法。
【請求項3】
前記推定された積載曲線が所定パラメータを超えた場合、前記所定パラメータ内に入る新しく推定された積載曲線を提供する前記ブロッキング機構に対して改定された間隔を空けた配列を示唆する請求項1に記載の方法。
【請求項4】
昇降台と、前記昇降台を吊り上げるための複数のホイストと、前記昇降台上で吊り上げられるべきアイテムの荷重を支えるための複数のブロッキング機構とを有する吊り上げ機構を操作する方法であって、
前記ブロッキング機構のそれぞれに関する位置データを収集すること、
各ホイスト上の荷重を読み取ること、
各ブロッキング機構の前記位置と各ホイスト上の前記荷重と前記昇降台の剛性とその荷重との間の所定の関係とに基づいて各ブロッキング機構上の荷重を計算すること、そして
各ブロッキング機構上の前記計算された荷重を出力することを含む方法。
【請求項5】
各ブロッキング機構上の前記計算された荷重を所定パラメータと比較すること、及びいずれかのブロッキング機構上の前記計算された荷重が前記所定パラメータを超えた場合に警報を提供することをさらに含む請求項4に記載の方法。
【請求項6】
各ブロッキング機構上の前記計算された荷重を所定パラメータと比較すること、及びいずれかのブロッキング機構上の前記計算された荷重が前記所定パラメータを超えた場合に吊り上げ動作を停止することをさらに含む請求項4に記載の方法。
【請求項7】
昇降台と、前記昇降台を吊り上げるための複数のホイストと、前記昇降台上で吊り上げられるべきアイテムの荷重を支えるための複数のブロッキング機構とを有する吊り上げ機構を操作する方法であって、
前記ブロッキング機構のそれぞれに関する位置データを収集すること、
各ホイスト上の荷重を読み取ること、
各ホイスト上の前記荷重と各ブロッキング機構の前記測位と前記昇降台の長さとに基づいて、前記昇降台上の推定されたメータ当たりトン積載を計算すること、そして
前記推定されたメータ当たりトン計算値を出力することを含む方法。
【請求項8】
前記推定されたメータ当たりトン積載を所定パラメータと比較すること、及び前記推定されたメータ当たりトン積載が前記所定パラメータを超えた場合に警報を提供することをさらに含む請求項7に記載の方法。
【請求項9】
前記推定されたメータ当たりトンを所定パラメータと比較すること、及び前記推定されたメータ当たりトンが前記所定パラメータを超えた場合に吊り上げ動作を停止することをさらに含む請求項7に記載の方法。
【請求項10】
吊り上げ機構を操作する方法であって、
前記吊り上げ機構の始動の際に前記吊り上げ機構の監視動作を活動化すること、
前記吊り上げ機構のある動作パラメータを監視すること、
前記動作パラメータを所定のトリガ・パラメータと比較すること、そして
前記トリガ・パラメータのいずれかに達した際に前記動作パラメータをログ記録することを含む方法。
【請求項11】
監視される前記動作パラメータは、前記吊り上げ機構の各ホイスト上の荷重と、各ホイストのモータの現行牽引と、前記ホイストの昇降台の各主要横ビームの位置とを含む請求項10に記載の方法。
【請求項12】
吊り上げ機構を操作する方法であって、
前記吊り上げ機構制御を活動化する際に監視システムを活動化すること、
モニタに対してシステム・パラメータのセットを選択すること、
少なくともある前記システム・パラメータに対するトリガ基準のセットを選択すること、
前記トリガ基準のいずれかに達するまで前記システム・パラメータを監視すること、そして
前記トリガ基準のいずれかに一度達すると、前記システム・パラメータを永続メモリにログ記録することを含む方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2011−98836(P2011−98836A)
【公開日】平成23年5月19日(2011.5.19)
【国際特許分類】
【出願番号】特願2010−254895(P2010−254895)
【出願日】平成22年11月15日(2010.11.15)
【分割の表示】特願2007−516698(P2007−516698)の分割
【原出願日】平成17年6月16日(2005.6.16)
【出願人】(504401400)ロールス − ロイス ネイブル マリーン、インコーポレイテッド (3)
【公開日】平成23年5月19日(2011.5.19)
【国際特許分類】
【出願日】平成22年11月15日(2010.11.15)
【分割の表示】特願2007−516698(P2007−516698)の分割
【原出願日】平成17年6月16日(2005.6.16)
【出願人】(504401400)ロールス − ロイス ネイブル マリーン、インコーポレイテッド (3)
[ Back to top ]