
船舶用推進システム及びそのコントロール装置
【課題】プロペラ回転速度の微調節を容易に行うことができる船舶用推進システムを提供する。
【解決手段】船外機0は、動力源30と、プロペラ41と、アクセル開度が入力されるコントロールレバー83と、コントロールレバー83の操作量を出力するアクセル開度検出部84と、感度切り替え部92と、制御装置91とを備えている。感度切り替え部92が操船者によって操作されることによって、コントロールレバー83の操作量に対するアクセル開度の大きさが切り替えられる。感度切り替え部92は、入力されたコントロールレバー83の操作量に対するアクセル開度の大きさを感度切り替え信号として出力する。制御装置91は、コントロールレバー83の操作量と感度切り替え信号とに基づいて動力源30の出力を制御する。
【解決手段】船外機0は、動力源30と、プロペラ41と、アクセル開度が入力されるコントロールレバー83と、コントロールレバー83の操作量を出力するアクセル開度検出部84と、感度切り替え部92と、制御装置91とを備えている。感度切り替え部92が操船者によって操作されることによって、コントロールレバー83の操作量に対するアクセル開度の大きさが切り替えられる。感度切り替え部92は、入力されたコントロールレバー83の操作量に対するアクセル開度の大きさを感度切り替え信号として出力する。制御装置91は、コントロールレバー83の操作量と感度切り替え信号とに基づいて動力源30の出力を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は船舶用推進システム及びそのコントロール装置に関する。
【背景技術】
【0002】
従来、例えば特許文献1に開示されたように、アクセル開度を調節するためのコントロールレバーを有するコントロール装置が知られている。特許文献1に開示されたコントロール装置では、コントロールレバーの操作量が大きくなるほど、アクセル開度が大きくなる。
【特許文献1】特開2007-283951号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、例えば船舶を離着岸させるときや、トローリングさせるときなどにおいて、プロペラ回転速度を微調節することで、船舶の推進速度を微調節したいときがある。
【0004】
しかしながら、特許文献1に開示されたコントロール装置では、プロペラ回転速度を微調節することが難しいという問題がある。
【0005】
本発明は、かかる点に鑑みてなされたものであり、その目的は、プロペラ回転速度の微調節を容易に行うことができる船舶用推進システムを提供することにある。
【課題を解決するための手段】
【0006】
本発明に係る第1の船舶用推進システムは、動力源と、プロペラと、コントロールレバーと、アクセル開度検出部と、感度切り替え部と、制御装置とを備えている。動力源は、回転力を発生させる。プロペラは、動力源の回転力により駆動される。コントロールレバーには、操船者の操作によってアクセル開度が入力される。アクセル開度検出部は、コントロールレバーの操作量を検出する。アクセル開度検出部は、コントロールレバーの操作量を出力する。感度切り替え部が操船者によって操作されることによって、コントロールレバーの操作量に対するアクセル開度の大きさが切り替えられる。感度切り替え部は、入力されたコントロールレバーの操作量に対するアクセル開度の大きさである感度を感度切り替え信号として出力する。制御装置は、コントロールレバーの操作量と感度切り替え信号とに基づいて動力源の出力を制御する。
【0007】
本発明に係る第2の船舶用推進システムは、動力源と、プロペラと、コントロールレバーと、アクセル開度検出部と、感度切り替え部と、制御装置とを備えている。動力源は、回転力を発生させる。プロペラは、動力源の回転力により駆動される。コントロールレバーには、操船者の操作によってアクセル開度が入力される。アクセル開度検出部は、コントロールレバーの操作量を検出する。アクセル開度検出部は、コントロールレバーの操作量に応じたアクセル開度を出力する。感度切り替え部が操船者によって操作されることによって、コントロールレバーの操作量に対するアクセル開度検出部から出力されるアクセル開度の大きさである感度が切り替えられる。制御装置は、アクセル開度に基づいて動力源の出力を制御する。
【0008】
本発明に係るコントロール装置は、舶用推進システムのコントロール装置である。舶用推進システムは、動力源と、プロペラと、制御装置とを備えている。動力源は、回転力を発生させる。プロペラは、動力源の回転力により駆動される。制御装置は、動力源の出力をアクセル開度に基づいて制御する。本発明に係るコントロール装置は、コントロールレバーと、アクセル開度検出部と、感度切り替え部とを備えている。コントロールレバーには、操船者の操作によってアクセル開度が入力される。アクセル開度検出部は、コントロールレバーの操作量を検出する。アクセル開度検出部は、コントロールレバーの操作量に応じたアクセル開度を出力する。感度切り替え部が操船者によって操作されることによって、コントロールレバーの操作量に対するアクセル開度検出部から出力されるアクセル開度の大きさである感度が切り替えられる。
【発明の効果】
【0009】
本発明によれば、プロペラ回転速度の微調節を容易に行うことができる船舶用推進システムを実現できる。
【発明を実施するための最良の形態】
【0010】
以下、本発明を実施した好ましい形態の一例について、図1に示す船舶用推進システムとしての船外機20を例に挙げて説明する。但し、以下の実施形態は、本発明を実施した好ましい形態の単なる例示である。本発明は、以下の実施形態に限定されるものではない。本発明に係る船舶用推進システムは、例えば、所謂船内機や、所謂スタンドライブであってもよい。スタンドライブは、船内外機ともいう。なお、「スタンドライブ」とは、少なくとも動力源が船体上に載置される船舶用推進システムをいう。「スタンドライブ」には、推進部以外のものが船体上に載置されているものも含まれる。
【0011】
《第1の実施形態》
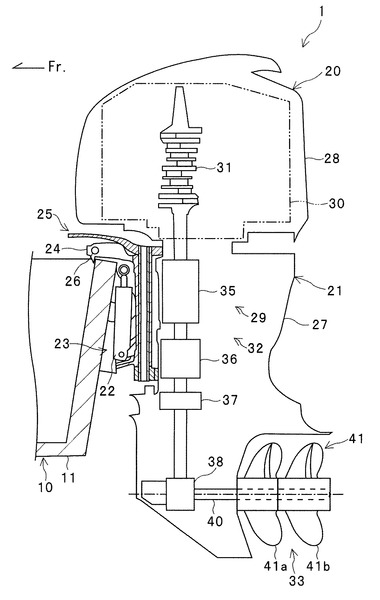
図1は、第1の実施形態に係る船舶1の船尾11部分を側面視した際の概略的な部分断面図である。図1に示すように、船舶1は、船体10と、船外機20とを備えている。船外機20は、船体10の船尾11に取り付けられている。
【0012】
(船外機20の概略構成)
船外機20は、船外機本体21と、チルト・トリム機構22と、ブラケット23とを備えている。
【0013】
ブラケット23は、マウントブラケット24とスイベルブラケット25とを備えている。マウントブラケット24は、船体10に固定されている。スイベルブラケット25は、マウントブラケット24に対して、旋回軸26を中心として揺動可能である。
【0014】
チルト・トリム機構22は、船外機本体21をチルト操作及びトリム操作するためのものである。具体的には、スイベルブラケット25をマウントブラケット24に対して揺動操作するためのものである。
【0015】
船外機本体21は、ケーシング27と、カウリング28と、推進力発生装置29とを備えている。推進力発生装置29は、後述する推進部33の一部を除いて、ケーシング27とカウリング28との内部に配置されている。
【0016】
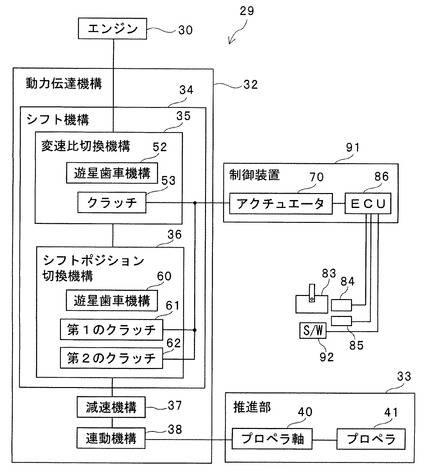
図1及び図2に示すように、推進力発生装置29は、エンジン30と、動力伝達機構32と、推進部33とを備えている。
【0017】
なお、本実施形態では、船外機20が動力源としてエンジン30を有する例について説明する。但し、動力源は、回転力を発生させることができるものである限り、特に限定されない。例えば、動力源は、電動モーターであってもよい。
【0018】
エンジン30は、図5に示すスロットルボディ87を有する燃料噴射式のエンジンである。エンジン30では、スロットル開度を調節することで、エンジン回転速度及びエンジン出力が調節される。エンジン30は、回転力を発生させる。図1に示すように、エンジン30は、クランクシャフト31を備えている。エンジン30は、発生した回転力を、クランクシャフト31を通じて出力する。
【0019】
動力伝達機構32は、エンジン30と推進部33との間に配置されている。動力伝達機構32は、エンジン30において発生した回転力を推進部33に伝達する。動力伝達機構32は、シフト機構34と、減速機構37と、連動機構38とを備えている。
【0020】
シフト機構34は、エンジン30のクランクシャフト31に接続されている。図2に示すように、シフト機構34は、変速比切り替え機構35と、シフトポジション切り替え機構36とを備えている。
【0021】
変速比切り替え機構35は、エンジン30と推進部33との間の変速比を高速変速比(HIGH)と低速変速比(LOW)との間で切り替える。ここで、「高速変速比」とは、出力側回転速度の入力側回転速度に対する比が比較的大きい変速比をいう。一方、「低速変速比」とは、出力側回転速度の入力側回転速度に対する比が比較的小さい変速比をいう。
【0022】
シフトポジション切り替え機構36は、シフトポジションをフォワード、リバース及びニュートラルとの間で切り替える。
【0023】
減速機構37は、シフト機構34と推進部33との間に配置されている。減速機構37は、シフト機構34からの回転力を、回転速度を減速して推進部33側に伝達する。なお、減速機構37の構造は、特に限定されない。減速機構37は、例えば、遊星歯車機構を有するものであってもよい。また、減速機構37は、例えば、減速ギア対を有するものであってもよい。
【0024】
連動機構38は、減速機構37と推進部33との間に配置されている。連動機構38は、図示しないベベルギア組を備えている。連動機構38は、減速機構37からの回転力を、方向を変えて推進部33に伝達させる。
【0025】
推進部33は、プロペラ軸40と、プロペラ41とを備えている。プロペラ軸40は、連動機構38からの回転力をプロペラ41に伝達する。推進部33は、エンジン30において発生した回転力を推進力に変換する。
【0026】
図1に示すように、プロペラ41は、第1のプロペラ41aと第2のプロペラ41bとの2つのプロペラを含んでいる。第1のプロペラ41aの螺旋方向と、第2のプロペラ41bの螺旋方向とは相互に逆方向である。動力伝達機構32から出力される回転力が正転方向であるとき、第1のプロペラ41aと第2のプロペラ41bとは互いに逆方向に回転し、前進方向の推進力が発生する。よって、シフトポジションがフォワードとなる。一方、動力伝達機構32から出力される回転力が逆転方向であるとき、第1のプロペラ41aと第2のプロペラ41bとのそれぞれは、前進時とは逆方向に回転する。これによって、後進方向の推進力が発生する。よって、シフトポジションがリバースとなる。
【0027】
なお、プロペラ41は、単一のプロペラまたは3つ以上のプロペラにより構成されていてもよい。
【0028】
(シフト機構34の詳細構造)
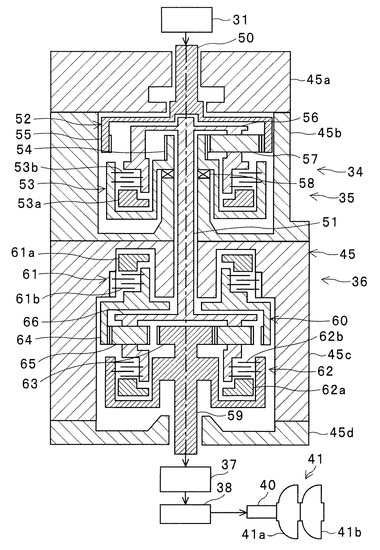
次に、主として図3を参照しながら、本実施形態におけるシフト機構34の構造について詳細に説明する。なお、図3は、シフト機構34を模式化して表している。このため、図3に示すシフト機構34の構造は、実際のシフト機構34の構造と厳密には一致しない。
【0029】
シフト機構34は、シフトケース45を備えている。シフトケース45は、外観視略円柱状である。シフトケース45は、第1のケース45aと、第2のケース45bと、第3のケース45cと、第4のケース45dとを備えている。第1のケース45aと、第2のケース45bと、第3のケース45cと、第4のケース45dとは、ボルトなどによって一体に固定されている。
【0030】
<変速比切り替え機構35>
変速比切り替え機構35は、入力軸としての第1の動力伝達軸50と、出力軸としての第2の動力伝達軸51と、変速ギア群としての遊星歯車機構52と、変速比切り替え用油圧式クラッチ53とを備えている。
【0031】
遊星歯車機構52は、第1の動力伝達軸50の回転を、低速変速比(LOW)または高速変速比(HIGH)で第2の動力伝達軸51に伝達する。遊星歯車機構52の変速比は、変速比切り替え用油圧式クラッチ53の断続により切り替えられる。
【0032】
第1の動力伝達軸50と第2の動力伝達軸51とは、同軸上に配置されている。第1の動力伝達軸50は、第1のケース45aによって回転可能に支持されている。第2の動力伝達軸51は、第2のケース45bと第3のケース45cとによって回転可能に支持されている。第1の動力伝達軸50は、クランクシャフト31に接続されている。また、第1の動力伝達軸50は、遊星歯車機構52に接続されている。
【0033】
遊星歯車機構52は、サンギア54と、リングギア55と、キャリア56と、複数のプラネタリギア57とを備えている。リングギア55は、略円筒状に形成されている。リングギア55の内周面に、プラネタリギア57と噛合する歯が形成されている。リングギア55は、第1の動力伝達軸50に接続されている。リングギア55は、第1の動力伝達軸50と共に回転する。
【0034】
サンギア54は、リングギア55の内部に配置されている。サンギア54とリングギア55とは同軸で回転する。サンギア54は、ワンウェイクラッチ58を介して、第2のケース45bに取り付けられている。ワンウェイクラッチ58は、正転方向の回転を許容する一方、逆転方向の回転を規制する。このため。サンギア54は、正転可能である一方、逆転不能である。
【0035】
サンギア54とリングギア55との間には、複数のプラネタリギア57が配置されている。各プラネタリギア57は、サンギア54とリングギア55との両方と噛合している。各プラネタリギア57は、キャリア56によって回転可能に支持されている。このため、複数のプラネタリギア57は、各々が回転しながら、第1の動力伝達軸50の軸心回りを相互に同速度で旋回する。
【0036】
なお、本明細書において、「回転」とは、部材が、その部材内に位置する軸を中心として回ることをいう。一方、「旋回」とは、部材が、その部材の外に位置する軸を中心として回ることをいう。
【0037】
キャリア56は、第2の動力伝達軸51に接続されている。キャリア56は、第2の動力伝達軸51と共に回転する。
【0038】
キャリア56とサンギア54との間には、変速比切り替え用油圧式クラッチ53が配置されている。本実施形態では、この変速比切り替え用油圧式クラッチ53は、湿式多板式クラッチである。但し、本発明において、変速比切り替え用油圧式クラッチ53は、湿式多板式クラッチに限定されない。変速比切り替え用油圧式クラッチ53は、乾式多板式クラッチであってもよく、所謂ドッグクラッチであってもよい。
【0039】
なお、本明細書において「多板式クラッチ」とは、相互に回転可能な第1の部材及び第2の部材と、第1の部材と共に回転する1または複数の第1のプレートと、第2の部材と共に回転する1または複数の第2のプレートとを備え、第1のプレートと第2のプレートとが圧接されることによって第1の部材と第2の部材との回転が規制されるクラッチをいう。本明細書において「クラッチ」は、回転力が入力される入力軸と、回転力が出力される出力軸との間に配置され、前記入力軸と前記出力軸との間を断続させるものに限定されない。
【0040】
変速比切り替え用油圧式クラッチ53は、油圧式のピストン53aと、クラッチプレート及びフリクションプレートを含むプレート群53bとを備えている。ピストン53aが駆動されることで、プレート群53bが圧接状態となる。このため、変速比切り替え用油圧式クラッチ53が接続状態となる。一方、ピストン53aが非駆動状態のときは、プレート群53bが非圧接状態となる。このため、変速比切り替え用油圧式クラッチ53が切断状態となる。
【0041】
変速比切り替え用油圧式クラッチ53が接続状態となると、サンギア54とキャリア56とが相互に固定された状態となる。このため、プラネタリギア57の旋回に伴って、サンギア54とキャリア56とが一体に回転する。
【0042】
<シフトポジション切り替え機構36>
シフトポジション切り替え機構36は、フォワードと、リバースと、ニュートラルとを切り替える。シフトポジション切り替え機構36は、入力軸としての第2の動力伝達軸51と、出力軸としての第3の動力伝達軸59と、回転方向切り替え機構としての遊星歯車機構60と、第1のシフト切り替え用油圧式クラッチ61と、第2のシフト切り替え用油圧式クラッチ62とを備えている。
【0043】
第1のシフト切り替え用油圧式クラッチ61と、第2のシフト切り替え用油圧式クラッチ62とは、入力軸としての第2の動力伝達軸51と、出力軸としての第3の動力伝達軸59との間を断続する。具体的には、第1のシフト切り替え用油圧式クラッチ61と、第2のシフト切り替え用油圧式クラッチ62とが断続されることによって、第2の動力伝達軸51と第3の動力伝達軸59との間の接続状態が変化する。言い換えれば、第1のシフト切り替え用油圧式クラッチ61と、第2のシフト切り替え用油圧式クラッチ62とは、第2の動力伝達軸51と第3の動力伝達軸59との間の接続状態を変化させるためのものである。具体的には、第1のシフト切り替え用油圧式クラッチ61と、第2のシフト切り替え用油圧式クラッチ62との接続力が調整されることによって、第2の動力伝達軸51の回転速度に対する第3の動力伝達軸59の回転速度が調節される。より具体的には、第1のシフト切り替え用油圧式クラッチ61と、第2のシフト切り替え用油圧式クラッチ62との接続力が調整されることによって、第2の動力伝達軸51の回転方向に対する第3の動力伝達軸59の回転方向、及び第2の動力伝達軸51の回転速度の絶対値に対する第3の動力伝達軸59の回転速度の絶対値の比が調節される。
【0044】
遊星歯車機構52は、第2の動力伝達軸51の回転方向に対する第3の動力伝達軸59の回転方向を切り替える。具体的には、遊星歯車機構52は、第2の動力伝達軸51の回転力を、正転方向または逆転方向の回転力として第3の動力伝達軸59に伝達する。遊星歯車機構52が伝達する回転力の回転方向は、第1のシフト切り替え用油圧式クラッチ61と、第2のシフト切り替え用油圧式クラッチ62との断続によって切り替えられる。
【0045】
第3の動力伝達軸59は、第3のケース45cと第4のケース45dとにより回転可能に支持されている。第2の動力伝達軸51と、第3の動力伝達軸59とは同軸上に配置されている。本実施形態では、油圧式クラッチ61,62は湿式多板式クラッチである。但し、油圧式クラッチ61,62は、それぞれドッグクラッチであってもよい。
【0046】
なお、第2の動力伝達軸51は、変速比切り替え機構35とシフトポジション切り替え機構36とが共有する部材である。
【0047】
遊星歯車機構60は、サンギア63と、リングギア64と、複数のプラネタリギア65と、キャリア66とを備えている。
【0048】
キャリア66は、第2の動力伝達軸51に接続されている。キャリア66は、第2の動力伝達軸51と共に回転する。このため、第2の動力伝達軸51の回転に伴って、キャリア66が回転すると共に、複数のプラネタリギア65が相互に同じ速度で旋回する。
【0049】
複数のプラネタリギア65は、リングギア64と、サンギア63とに噛合している。リングギア64と第3のケース45cとの間には、第1のシフト切り替え用油圧式クラッチ61が配置されている。第1のシフト切り替え用油圧式クラッチ61は、油圧式のピストン61aと、クラッチプレートとフリクションプレートとを含むプレート群61bとを備えている。この油圧式のピストン61aが駆動されることで、プレート群61bが圧接状態となる。このため、第1のシフト切り替え用油圧式クラッチ61が接続状態となる。その結果、リングギア64が第3のケース45cに対して固定され、回転不能となる。一方、油圧式のピストン61aが非駆動状態のときは、プレート群61bが非圧接状態となる。このため、第1のシフト切り替え用油圧式クラッチ61が非接続状態となる。その結果、リングギア64が第3のケース45cに対して非固定状態となり、回転可能となる。
【0050】
キャリア66とサンギア63との間には、第2のシフト切り替え用油圧式クラッチ62が配置されている。第2のシフト切り替え用油圧式クラッチ62は、油圧式のピストン62aと、クラッチプレート及びフリクションプレートを含むプレート群62bとを備えている。この油圧式のピストン62aが駆動されることで、プレート群62bが圧接状態となる。このため、第2のシフト切り替え用油圧式クラッチ62が接続状態となる。その結果、キャリア66とサンギア63とが一体に回転する。一方、油圧式のピストン62aが非駆動状態のときは、プレート群62bが非圧接状態となる。このため、第2のシフト切り替え用油圧式クラッチ62が非接続状態となる。その結果、リングギア64とサンギア63とが相互に回転可能となる。
【0051】
なお、遊星歯車機構60の減速比は、1:1に限定されない。遊星歯車機構60は、1:1とは異なる減速比を有するものであってもよい。また、遊星歯車機構60が正転方向の回転として回転力を伝達する場合と、逆転方向の回転として回転力を伝達させる場合とで、遊星歯車機構60の減速比は同じであってもよいし、異なっていてもよい。
【0052】
本実施形態では、遊星歯車機構60が1:1とは異なる減速比を有し、且つ遊星歯車機構60が正転方向の回転として回転力を伝達する場合と、逆転方向の回転として回転力を伝達させる場合とで減速比が異なる場合について説明する。
【0053】
具体的に、本実施形態では、第1の動力伝達軸50の回転速度と、第3の動力伝達軸59の回転速度との比は、以下のようになっている。
高速フォワード : 1:1、減速比1
高速リバース : 1:1.08、減速比0.93
低速フォワード : 1:0.77、減速比1.3
低速リバース : 1:0.83、減速比1.21
【0054】
図2に示すように、シフト機構34は、制御装置91によって制御される。具体的には、変速比切り替え用油圧式クラッチ53と、第1のシフト切り替え用油圧式クラッチ61と、第2のシフト切り替え用油圧式クラッチ62との断続が制御装置91によって制御される。
【0055】
制御装置91は、アクチュエータ70と、電子コントロールユニットとしてのelectronic control unit(ECU)86とを備えている。アクチュエータ70は、変速比切り替え用油圧式クラッチ53と、第1のシフト切り替え用油圧式クラッチ61と、第2のシフト切り替え用油圧式クラッチ62とを断続させる。Electronic control unit86は、アクチュエータ70を制御する。
【0056】
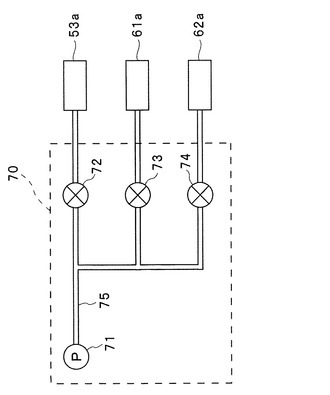
具体的には、図4に示すように、油圧式シリンダ53a、61a、62aは、アクチュエータ70によって駆動される。アクチュエータ70は、オイルポンプ71と、オイル経路75と、変速比切り替え用電磁バルブ72と、後進シフト接続用電磁バルブ73と、前進シフト接続用電磁バルブ74とを備えている。
【0057】
オイルポンプ71は、オイル経路75によって油圧式シリンダ53a、61a、62aに接続されている。変速比切り替え用電磁バルブ72は、オイルポンプ71と油圧式シリンダ53aとの間に配置されている。この変速比切り替え用電磁バルブ72によって油圧式シリンダ53aの油圧が調節される。後進シフト接続用電磁バルブ73は、オイルポンプ71と油圧式シリンダ61aとの間に配置されている。後進シフト接続用電磁バルブ73によって油圧式シリンダ61aの油圧が調節される。前進シフト接続用電磁バルブ74は、オイルポンプ71と油圧式シリンダ62aとの間に配置されている。前進シフト接続用電磁バルブ74によって油圧式シリンダ62aの油圧が調節される。
【0058】
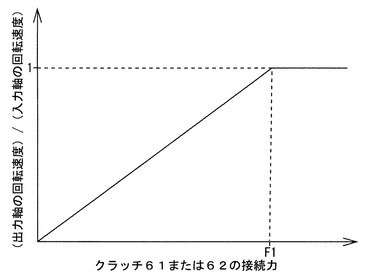
変速比切り替え用電磁バルブ72と、後進シフト接続用電磁バルブ73と、前進シフト接続用電磁バルブ74とのそれぞれは、オイル経路75の経路面積を徐変可能である。このため、変速比切り替え用電磁バルブ72と、後進シフト接続用電磁バルブ73と、前進シフト接続用電磁バルブ74とを用いることによって、油圧式シリンダ53a、61a、62aの押圧力を徐変させることができる。従って、油圧式クラッチ53,61,62の接続力の徐変が可能となっている。よって、図7に示すように、第2の動力伝達軸51の回転速度に対する第3の動力伝達軸59の比を調節することができる。その結果、入力軸としての第2の動力伝達軸51の回転速度に対する出力軸としての第3の動力伝達軸59の回転速度の比を実質的に連続的に調節することができる。
【0059】
本実施形態では、変速比切り替え用電磁バルブ72と、後進シフト接続用電磁バルブ73と、前進シフト接続用電磁バルブ74とのそれぞれは、PWM(Pulse Width Modulation)制御されるソレノイドバルブにより構成されている。但し、変速比切り替え用電磁バルブ72と、後進シフト接続用電磁バルブ73と、前進シフト接続用電磁バルブ74とのそれぞれは、PWM制御されるソレノイドバルブ以外のバルブにより構成されていてもよい。例えば、変速比切り替え用電磁バルブ72と、後進シフト接続用電磁バルブ73と、前進シフト接続用電磁バルブ74とのそれぞれは、オン−オフ制御されるソレノイドバルブによって構成されていてもよい。
【0060】
(シフト機構34の変速動作)
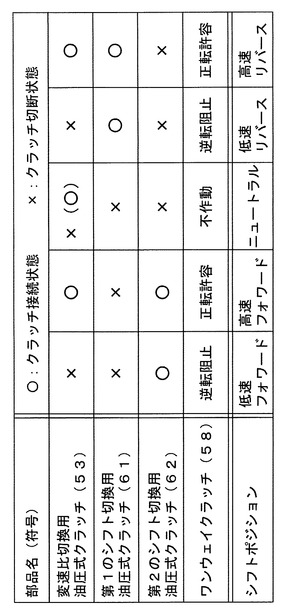
次に、シフト機構34の変速動作について、主として図3と図6を参照しつつ詳細に説明する。図6は、油圧式クラッチ53,61,62の接続状態と、シフト機構34のシフトポジションとを表す表である。シフト機構34では、第1〜第3の油圧式クラッチ53,61,62の断続によって、シフトポジションが切り替えられる。
【0061】
<低速変速比と高速変速比との切り替え>
低速変速比と高速変速比との切り替えは変速比切り替え機構35において行われる。具体的には、変速比切り替え用油圧式クラッチ53の操作によって低速変速比と高速変速比とが切り替えられる。詳細には、変速比切り替え用油圧式クラッチ53が切断状態にある場合に、変速比切り替え機構35の変速比が「低速変速比」となる。一方、変速比切り替え用油圧式クラッチ53が接続状態である場合に、変速比切り替え機構35の変速比が「高速変速比」となる。
【0062】
図3に示すように、リングギア55は第1の動力伝達軸50に接続されている。このため、第1の動力伝達軸50の回転に伴って、リングギア55が正転方向に回転する。ここで、変速比切り替え用油圧式クラッチ53が切断状態にある場合、キャリア56とサンギア54とは相互に回転可能となっている。よって、プラネタリギア57が回転すると共に旋回する。その結果、サンギア54が逆転方向に回転しようとする。
【0063】
しかしながら、図6に示すように、ワンウェイクラッチ58は、サンギア54の逆転方向回転を阻止する。このため、サンギア54はワンウェイクラッチ58によって固定される。その結果、リングギア55の回転に伴ってサンギア54とリングギア55との間でプラネタリギア57が旋回することで、キャリア56と共に第2の動力伝達軸51が回転する。この場合、プラネタリギア57は旋回すると共に回転するため、第1の動力伝達軸50の回転は、減速されて第2の動力伝達軸51に伝達される。従って、変速比切り替え機構35の変速比が「低速変速比」となる。
【0064】
一方、変速比切り替え用油圧式クラッチ53が接続状態にある場合、プラネタリギア57とサンギア54とが一体に回転する。よって、プラネタリギア57の回転が禁止される。従って、プラネタリギア57とキャリア56とサンギア54とがリングギア55の回転に伴ってリングギア55と同じ回転速度で正転方向に回転する。ここで、図6に示すように、ワンウェイクラッチ58は、サンギア54の正転を許容する。その結果、第1の動力伝達軸50と第2の動力伝達軸51とが実質的に同じ回転速度で正転方向に回転する。言い換えれば、第2の動力伝達軸51に第1の動力伝達軸50の回転力が同じ回転速度且つ同じ回転方向で伝達される。従って、変速比切り替え機構35の変速比が「高速変速比」となる。
【0065】
<フォワード、リバース及びニュートラルの切り替え>
フォワード、リバース及びニュートラルの切り替えは、シフトポジション切り替え機構36において行われる。具体的には、第1のシフト切り替え用油圧式クラッチ61と第2のシフト切り替え用油圧式クラッチ62との操作によってフォワード、リバース及びニュートラルの切り替えが行われる。
【0066】
第1のシフト切り替え用油圧式クラッチ61が切断状態である一方、第2のシフト切り替え用油圧式クラッチ62が接続状態である場合に、シフトポジション切り替え機構36のシフトポジションが「フォワード」となる。第1のシフト切り替え用油圧式クラッチ61が切断状態である場合、リングギア64は、シフトケース45に対して回転可能である。第2のシフト切り替え用油圧式クラッチ62は接続状態にある場合、キャリア66とサンギア63及び第3の動力伝達軸59とは一体に回転する。このため、第1のシフト切り替え用油圧式クラッチ61が接続状態である一方、第2のシフト切り替え用油圧式クラッチ62は接続状態にある場合、第2の動力伝達軸51とキャリア66とサンギア63と第3の動力伝達軸59とが一体に正転方向に回転する。従って、シフトポジション切り替え機構36のシフトポジションが「フォワード」となる。
【0067】
第1のシフト切り替え用油圧式クラッチ61が接続状態である一方、第2のシフト切り替え用油圧式クラッチ62が切断状態である場合に、シフトポジション切り替え機構36のシフトポジションが「リバース」となる。第1のシフト切り替え用油圧式クラッチ61が接続状態である一方、第2のシフト切り替え用油圧式クラッチ62は切断状態にある場合、リングギア64はシフトケース45によって回転規制される。一方、サンギア63は、キャリア66に対して回転可能となる。従って、第2の動力伝達軸51が正転方向に回転するにともなって、プラネタリギア65が回転しながら旋回する。その結果、サンギア63と第3の動力伝達軸59とが逆転方向に回転する。従って、シフトポジション切り替え機構36のシフトポジションが「リバース」となる。
【0068】
また、第1のシフト切り替え用油圧式クラッチ61と第2のシフト切り替え用油圧式クラッチ62との両方が切断状態である場合に、シフトポジション切り替え機構36のシフトポジションが「ニュートラル」となる。第1のシフト切り替え用油圧式クラッチ61と第2のシフト切り替え用油圧式クラッチ62との両方が切断状態にある場合、遊星歯車機構60は空転状態となる。このため、第2の動力伝達軸51の回転は第3の動力伝達軸59へと伝達されない。従って、シフトポジション切り替え機構36のシフトポジションが「ニュートラル」となる。
【0069】
以上説明したように、低速変速比と高速変速比との間の切り替え、及びシフトポジションの切り替えが行われる。従って、図6に示すように、変速比切り替え用油圧式クラッチ53及び第1のシフト切り替え用油圧式クラッチ61が切断状態にある一方、第2のシフト切り替え用油圧式クラッチ62が接続状態にある場合に、シフト機構34のシフトポジションが「低速フォワード」となる。
【0070】
変速比切り替え用油圧式クラッチ53と第2のシフト切り替え用油圧式クラッチ62とが接続状態である一方、第1のシフト切り替え用油圧式クラッチ61が切断状態である場合に、シフト機構34のシフトポジションが「高速フォワード」となる。
【0071】
第1のシフト切り替え用油圧式クラッチ61及び第2のシフト切り替え用油圧式クラッチ62との両方が切断状態の場合に、変速比切り替え用油圧式クラッチ53の接続状態に関わらず、シフト機構34のシフトポジションが「ニュートラル」となる。
【0072】
変速比切り替え用油圧式クラッチ53と第2のシフト切り替え用油圧式クラッチ62とが切断状態にある一方、第1のシフト切り替え用油圧式クラッチ61が接続状態にある場合に、シフト機構34のシフトポジションが「低速リバース」となる。
【0073】
また、変速比切り替え用油圧式クラッチ53と第1のシフト切り替え用油圧式クラッチ61とが接続状態にある一方、第2のシフト切り替え用油圧式クラッチ62が切断状態にある場合に、シフト機構34のシフトポジションが「高速リバース」となる。
【0074】
(船舶1の制御ブロック)
次に主として図5を参照しながら船舶1の制御ブロックについて説明する。
【0075】
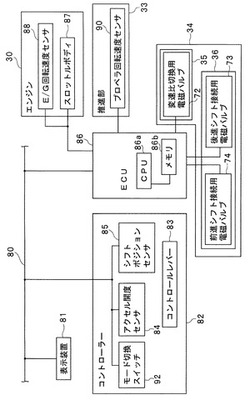
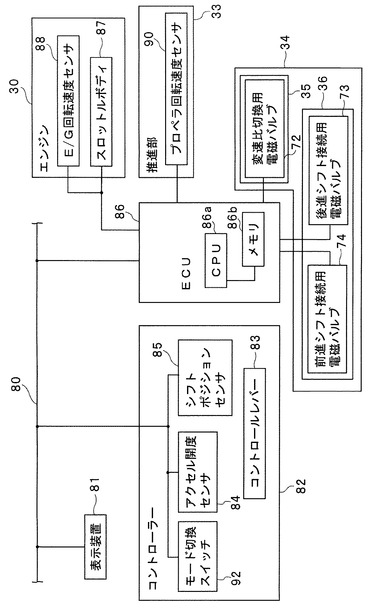
まず、図5を参照して、船外機20の制御ブロックについて説明する。船外機20には、ECU86が配置されている。ECU86は、図2に描画された制御装置91の一部を構成している。このECU86によって、船外機20の各機構が制御される。
【0076】
ECU86は、演算部としてのCPU(central processing unit)86aとメモリ86bとを備えている。メモリ86bには、後述するマップなどの各種設定などが記憶されている。メモリ86bは、CPU86aに接続されている。CPU86aは、各種演算を行う際に、メモリ86bに格納された必要な情報を読み出す。また、CPU86aは、必要に応じて、演算結果をメモリ86bに出力し、メモリ86bに演算結果などを記憶させる。
【0077】
ECU86には、エンジン30のスロットルボディ87が接続されている。スロットルボディ87は、このECU86によって制御される。これにより、エンジン30のスロットル開度が制御される。具体的には、コントロールレバー83の操作量と、感度切り替え信号とに基づいてエンジン30のスロットル開度が制御される。その結果、エンジン30の出力が制御される。
【0078】
また、ECU86には、エンジン回転速度センサ88が接続されている。エンジン回転速度センサ88は、図1に示すエンジン30のクランクシャフト31の回転速度を検出する。エンジン回転速度センサ88は、検出したエンジン回転速度をECU86に出力する。
【0079】
推進部33には、プロペラ回転速度センサ90が配置されている。プロペラ回転速度センサ90は、プロペラ41の回転速度を検出する。プロペラ回転速度センサ90は、検出した回転速度をECU86に対して出力する。なお、プロペラ41の回転速度とプロペラ軸40の回転速度とは相互に実質的に同じである。従って、プロペラ回転速度センサ90は、プロペラ軸40の回転速度を検出するものであってもよい。
【0080】
また、ECU86には、変速比切り替え用電磁バルブ72と、前進シフト接続用電磁バルブ74と、後進シフト接続用電磁バルブ73とが接続されている。変速比切り替え用電磁バルブ72と、前進シフト接続用電磁バルブ74と、後進シフト接続用電磁バルブ73との開閉及び開度調整は、このECU86によって制御される。
【0081】
図5に示すように、船舶1は、local area network (LAN)80を備えている。LAN80は、船体10に巡らされている。船舶1では、このLAN80を介して装置間の信号の送受信が行われている。
【0082】
LAN80には、船外機20のECU86、コントローラー82及び表示装置81などが接続されている。表示装置81は、ECU86から出力された情報や、後述するコントローラー82から出力された情報を表示させる。具体的には、表示装置81は、船舶1の現在のスピード、シフトポジションなどを表示させる。
【0083】
コントローラー82は、コントロールレバー83と、アクセル開度センサ84と、シフトポジションセンサ85と、モード切り替えスイッチ92とを備えている。
【0084】
コントロールレバー83には、船舶1の操船者の操作によってシフトポジションやアクセル開度が入力される。具体的に、操船者がコントロールレバー83を操作すると、コントロールレバー83の位置に応じたアクセル開度及びシフトポジションが、アクセル開度センサ84とシフトポジションセンサ85とのそれぞれによって検出される。アクセル開度センサ84とシフトポジションセンサ85とのそれぞれは、LAN80に接続されている。アクセル開度センサ84とシフトポジションセンサ85とは、それぞれアクセル開度信号とシフトポジション信号とをLAN80に対して送信する。ECU86は、アクセル開度センサ84とシフトポジションセンサ85とから出力されたアクセル開度信号やシフトポジション信号を、LAN80を介して受信する。
【0085】
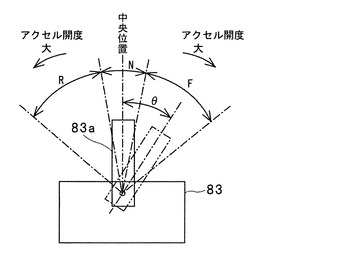
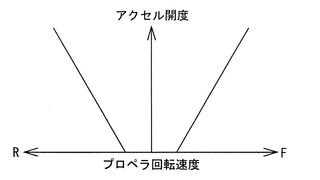
具体的には、コントロールレバー83の操作部83aが図8において「N」で示された中立領域に位置するときに、シフトポジションセンサ85は、ニュートラルに対応したシフトポジション信号を出力する。コントロールレバー83の操作部83aが図8において「F」で示された前進領域に位置するときに、シフトポジションセンサ85は、フォワードに対応したシフトポジション信号を出力する。コントロールレバー83の操作部83aが図8において「R」で示された後進領域に位置するときに、シフトポジションセンサ85は、リバースに対応したシフトポジション信号を出力する。
【0086】
アクセル開度センサ84は、操作部83aの操作量を検出する。具体的には、アクセル開度センサ84は、操作部83aが中央位置からどれだけ操作されたかを表す操作角度θを検出する。操作部83aは、その操作角度θをアクセル開度信号として出力する。
【0087】
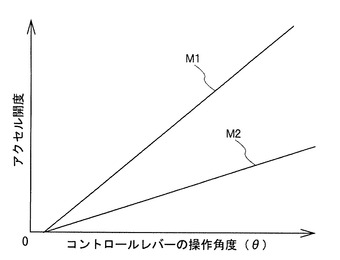
図5に示すモード切り替えスイッチ92には、操船者の操作によって第1のモードと第2のモードとのいずれかが入力される。ここで、「第1のモード」では、図9のM1に示すように、コントロールレバー83の操作角度θに対するアクセル開度の大きさが比較的大きなモードである。一方、「第2のモード」とは、図9のM2に示すように、コントロールレバー83の操作角度θに対するアクセル開度の大きさが比較的小さなモードである。すなわち、第1のモードと第2のモードとは、コントロールレバー83の操作角度θに対するアクセル開度の大きさが相互に異なるモードである。
【0088】
モード切り替えスイッチ92は、第1のモード及び第2のモードのうちの入力されたモードに応じた信号をECU86に対して出力する。本実施形態では、この「入力されたモードに応じた信号」が感度切り替え信号となる。
【0089】
操船者がモード切り替えスイッチ92を操作することによって第1のモードが選択されると、CPU86aは、入力されたアクセル開度信号に基づいて、メモリ86bに記憶された図9に示すマップM1を参照してアクセル開度を決定する。一方、操船者がモード切り替えスイッチ92を操作することによって第2のモードが選択されると、CPU86aは、入力されたアクセル開度信号に基づいて、メモリ86bに記憶された図9に示すマップM2を参照してアクセル開度を決定する。
【0090】
(船舶1の制御)
次に、船舶1の制御について説明する。
【0091】
<船舶1の基本的制御>
船舶1の操船者によりコントロールレバー83が操作されると、アクセル開度センサ84とシフトポジションセンサ85とによってコントロールレバー83の操作状況に応じたアクセル開度とシフトポジションとが検出される。検出されたアクセル開度とシフトポジションとは、LAN80に送信される。ECU86は、LAN80を介して出力されたアクセル開度信号とシフトポジション信号とを受信する。ECU86は、アクセル開度信号と図9に示すマップとから得られるアクセル開度に基づいてスロットルボディ87及び油圧式クラッチ61,62を制御する。ECU86は、これによってプロペラ回転速度の制御を行う。
【0092】
また、ECU86は、シフトポジション信号に応じてシフト機構34を制御する。具体的には、「低速フォワード」のシフトポジション信号を受信した場合は、変速比切り替え用電磁バルブ72を駆動させて変速比切り替え用油圧式クラッチ53を切断すると共に、支部と接続用電磁バルブ73,74を駆動させて第1のシフト切り替え用油圧式クラッチ61を切断させる一方、第2のシフト切り替え用油圧式クラッチ62を接続させる。これにより、シフトポジションが「低速フォワード」に切り替えられる。
【0093】
<船舶1の具体的制御>
(1)第1のモードと第2のモードとにおけるプロペラ回転速度の制御
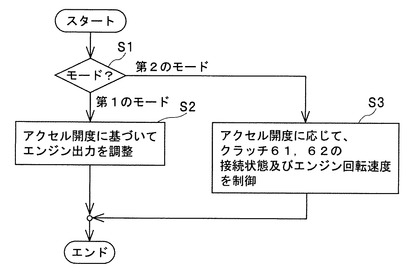
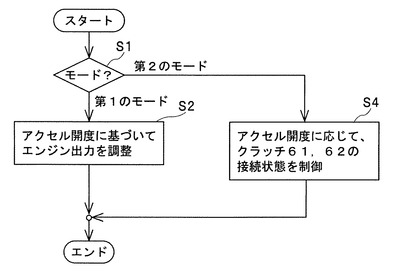
船外機20が稼働している際には、図10に示す制御が繰り返し行われる。図10に示すように、船外機20が稼働されているとき、まずステップS1において、モードが判断される。ステップS1において、第1のモードであると判断された場合は、ステップS2に進む。ステップS2において、シフト切り替え用油圧式クラッチ61,62の接続力は調節されず、アクセル開度に基づいてエンジン出力が調節される。シフト切り替え用油圧式クラッチ61,62は、選択されているシフトポジションに応じて切断状態または接続状態にされている。より具体的には、シフト切り替え用油圧式クラッチ61,62の接続力が実質的に0%または実質的に100%とされる。
【0094】
このため、シフト切り替え用油圧式クラッチ61,62の一方が接続された状態では、入力軸としての第2の動力伝達軸51の回転速度の大きさと、出力軸としての第3の動力伝達軸59の回転速度の大きさとが実質的に同じになるように制御される。具体的には、入力軸としての第2の動力伝達軸51の回転速度と、出力軸としての第3の動力伝達軸59の回転速度とが実質的に同じになるように制御される。なお、「回転速度の大きさが実質的に同じ」とは、回転速度の絶対値が同じであることを意味し、回転方向は同じであっても逆であってもよい。
【0095】
但し、上述のように、遊星歯車機構60の減速比は、減速比が1:1でなくてもよい。遊星歯車機構60の減速比が1:1ではない場合は、入力軸としての第2の動力伝達軸51の回転速度の大きさと、出力軸としての第3の動力伝達軸59の回転速度の大きさとが完全に同じにはならない。本実施形態において、「回転速度の大きさが実質的に同じ」には、回転速度の大きさの差が1割程度であることが含まれるものとする。
【0096】
一方、ステップS1において、第2のモードであると判断された場合は、ステップS3に進む。ステップS3では、アクセル開度に応じてエンジン回転速度と共にシフト切り替え用油圧式クラッチ61,62の接続力が調節される。以下、ステップS3において行われる第2のモードにおけるプロペラ回転速度の具体的な制御内容について、図11を主として参照しながら詳細に説明する。
【0097】
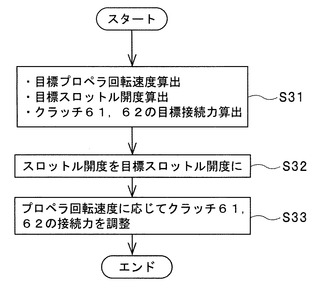
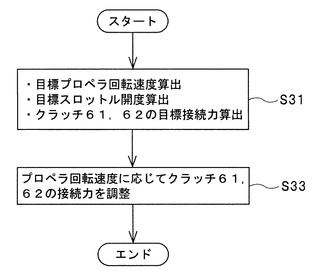
図11に示すように、第2のモードでは、まず、ステップS31において、目標プロペラ回転速度、目標スロットル開度及びシフト切り替え用油圧式クラッチ61,62の目標接続力が算出される。
【0098】
具体的に、CPU986aは、メモリ86bに記憶された図12に示すマップを読み出す。図12に示すマップは、プロペラ回転速度とアクセル開度との関係を規定したものである。CPU86aは、この図12に示すマップにアクセル開度信号から算出されたアクセル開度を当てはめることによってプロペラ41の目標回転速度を算出する。
【0099】
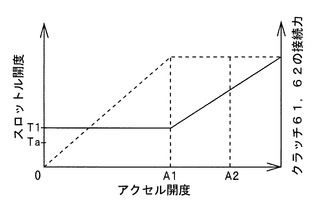
CPU86aは、メモリ86bに記憶された図13に示すマップを読み出す。図13に示すマップは、アクセル開度と、スロットル開度及びシフト切り替え用油圧式クラッチ61,62の接続力との関係を規定したものである。具体的に、図13に実線で示すグラフがスロットル開度を規定している。図13に破線で示すグラフがシフト切り替え用油圧式クラッチ61,62の接続力を規定している。CPU86aは、この図13に示すマップに算出されたアクセル開度を当てはめることによって目標スロットル開度及びシフト切り替え用油圧式クラッチ61,62の目標接続力を算出する。
【0100】
なお、図13に示すように、アクセル開度が所定のアクセル開度A1以下の場合は、アクセル開度に関わらず目標スロットル開度はT1となる。なお、T1は、エンジン30がアイドル状態にあるときのスロットル開度Taよりも若干大きな値に設定されている。このため、アクセル開度が所定のアクセル開度A1以下のときは、エンジン回転速度は略一定に保持される。
【0101】
一方、アクセル開度が所定のアクセル開度A1以上の場合は、アクセル開度の増大に伴って目標スロットル開度が大きくなるように設定されている。このため、アクセル開度が所定のアクセル開度A1以上のときはアクセル開度に応じてエンジン回転速度が調節される。
【0102】
また、アクセル開度が所定のアクセル開度A1以下のときは、アクセル開度の増大に伴って、シフト切り替え用油圧式クラッチ61,62の目標接続力が大きくなるように設定されている。アクセル開度が所定のアクセル開度A1より大きくA2よりも小さいときもアクセル開度の増大に伴って、シフト切り替え用油圧式クラッチ61,62の目標接続力が大きくなるように設定されている。但し、アクセル開度が所定のアクセル開度A1より大きくA2よりも小さいときのアクセル開度に対するシフト切り替え用油圧式クラッチ61,62の目標接続力の変化率は、アクセル開度が所定のアクセル開度A1以下のときのアクセル開度に対するシフト切り替え用油圧式クラッチ61,62の目標接続力の変化率よりも小さく設定されている。アクセル開度が所定のアクセル開度A2より大きいときは、アクセル開度に関わらずシフト切り替え用油圧式クラッチ61,62の接続力は一定となる。
【0103】
このため、スロットル開度とシフト切り替え用油圧式クラッチ61,62の接続力とがそれぞれの目標値通りに制御された場合、第2の動力伝達軸51の回転速度と第3の動力伝達軸59の回転速度とは、図14に示すようになる。
【0104】
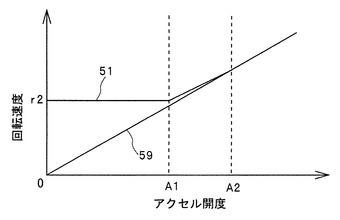
なお、図14及び図15において、符号「51」で示された線が第2の動力伝達軸51の回転速度を示している。符号「59」で示された線が第3の動力伝達軸59の回転速度を示している。
【0105】
また、図14及び図15に示すグラフは、説明の便宜上、プロペラ41の負荷状態などが一定であると仮定した模式的なグラフである。実際にはプロペラ41の負荷状態などが随時変化するため、必ずしも図14や図15に示すようになるとは限らない。また、以下の説明においても、説明の便宜上、プロペラ41の負荷状態などがないものと仮定して説明する。
【0106】
具体的には、図14に示すように、アクセル開度が所定のアクセル開度A1以下のときは、第2の動力伝達軸51の回転速度は、所定の回転速度r2でほぼ一定となる。アクセル開度が所定のアクセル開度A1以上のときに、第2の動力伝達軸51の回転速度は、アクセル開度の増大に伴って高くなる。
【0107】
一方、アクセル開度がゼロであるときは、第3の動力伝達軸59は実質的に回転しない。第3の動力伝達軸59の回転速度は、アクセル開度がゼロから増大すると共に高くなる。アクセル開度が所定のアクセル開度A1となったときに、第2の動力伝達軸51の回転速度と第3の動力伝達軸59の回転速度とがほぼ等しくなる。アクセル開度が所定のアクセル開度A2となったときに、第2の動力伝達軸51の回転速度と第3の動力伝達軸59の回転速度とが実質的に等しくなる。
【0108】
すなわち、アクセル開度が所定のアクセル開度A2となったときに、シフト切り替え用油圧式クラッチ61,62が実質的に完全に接続される。アクセル開度が所定のアクセル開度A2となるまでは、シフト切り替え用油圧式クラッチ61,62は、所謂半クラッチ制御される。これによって、第3の動力伝達軸59の回転速度の大きさが第2の動力伝達軸51の回転速度の大きさよりも低くなるように調整される。
【0109】
本実施形態では、図11に示すように、ステップS31に続いてステップS32が行われる。ステップS32では、CPU86aによって、算出された目標スロットル開度にスロットル開度が調節される。
【0110】
次に、ステップS33において、CPU86aによって、プロペラ回転速度センサ90によって検出される実際のプロペラ回転速度に応じてシフト切り替え用油圧式クラッチ61,62の接続力が調節される。以下、ステップS33において行われるシフト切り替え用油圧式クラッチ61,62の接続力の調整制御の具体的な内容について、図18を主として参照しながら詳細に説明する。
【0111】
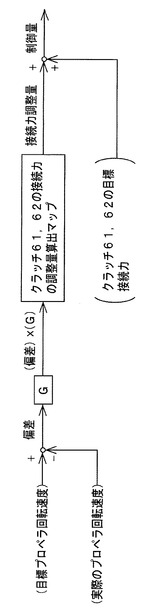
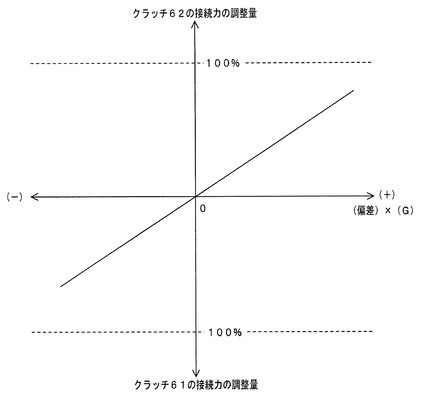
上述のように、CPU86aは、ステップS31において、図12におけるアクセル開度とプロペラ回転速度との関係を示すマップを用いてプロペラ回転速度目標値を求める。次に、CPU86aは、図18に示すように、プロペラ回転速度目標値と実際のプロペラ回転速度との偏差を求める。この偏差に制御ゲインをかけた値に基づいて、目標とするシフト切り替え用油圧式クラッチ61,62の接続力の調整量が求められる。具体的には、算出された(偏差)×(ゲイン(G))を、図19に示すシフト切り替え用油圧式クラッチ61,62の接続力の調節量と(偏差)×(ゲイン(G))との関係を示すマップに当てはめることによって、CPU86aは、シフト切り替え用油圧式クラッチ61,62の接続力の調整量を算出する。CPU86aは、算出されたシフト切り替え用油圧式クラッチ61,62の接続力の調整量と、ステップS31において算出されたシフト切り替え用油圧式クラッチ61,62の目標接続力とを加算することによって、シフト切り替え用油圧式クラッチ61,62の接続力を求める。そして、CPU86aは、求められたシフト切り替え用油圧式クラッチ61,62の接続力に基づいて、シフト接続用電磁バルブ73,74を調節する。
【0112】
ここで、求められたシフト切り替え用油圧式クラッチ61,62の接続力が0〜100%の間である場合は、CPU86aは、シフト切り替え用油圧式クラッチ61,62の接続力が求められた接続力となるようにシフト接続用電磁バルブ73,74を調節する。求められたシフト切り替え用油圧式クラッチ61,62の接続力が0%未満である場合は、CPU86aは、逆側のクラッチの接続力が増大するようにシフト接続用電磁バルブ73,74を調節する。また、求められたシフト切り替え用油圧式クラッチ61,62の接続力が100%を超える場合は、CPU86aは、シフト切り替え用油圧式クラッチ61または62の接続力が100%となるようにシフト接続用電磁バルブ73,74を調節する。
【0113】
なお、制御ゲインは、比例ゲイン、積分ゲインおよび微分ゲインの中から、油圧応答性や機械的慣性力などに応じて、選択される。制御ゲインとして、比例ゲイン、積分ゲインおよび微分ゲインの中から選ばれた2つ以上のゲインを組み合わせたものを使用してもよい。
【0114】
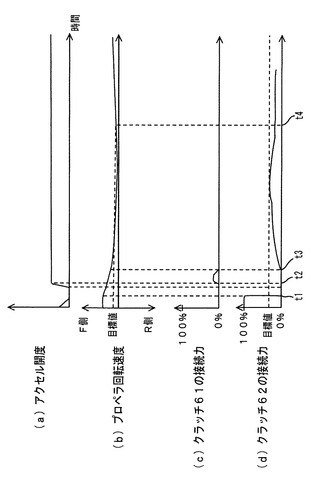
以下、図20に示すタイムチャートの一例を参照しつつ、具体的に説明する。
【0115】
図20に示す例では、時間t1において、シフトポジション切り替え機構36のシフトポジションがニュートラルにされ、次いで、時間t2において、第2のモードが開始されている。このため、ステップS3によって、時間t2以降は、アクセル開度に応じて、シフト切り替え用油圧式クラッチ61,62の接続状態及びエンジン回転速度が制御される。
【0116】
時間t2〜t3の期間は、目標プロペラ回転速度がゼロに近づく。時間t2〜t3の期間は、目標プロペラ回転速度と実際のプロペラ回転速度との偏差が大きい。このため、図18に示す演算によって求められる第1のシフト切り替え用油圧式クラッチ62の制御量が0%未満となる。よって、目標プロペラ回転速度がフォワード側であるにもかかわらず、第2のシフト切り替え用油圧式クラッチ61の接続力の増大が行われている。その結果、プロペラ回転速度が低下し、実際のプロペラ回転速度が目標プロペラ回転速度に近づいている。
【0117】
時間t3〜t4の期間では、目標プロペラ回転速度と実際のプロペラ回転速度との偏差が小さい。このため、図18に示す演算によって求められる第1のシフト切り替え用油圧式クラッチ62の制御量が0〜100%の範囲となる。従って、第2のシフト切り替え用油圧式クラッチ61の接続力が求められた制御量に従って増大されている。
【0118】
時間t4以降は、図18に示すフィードバック制御が平衡した状態となっている。時間t4以降は、第1のシフト切り替え用油圧式クラッチ62の接続力は、目標接続力よりも少し小さい値で保持されている。
【0119】
以上説明したように、本実施形態では、モードを切り替えることによって、コントロールレバー83の操作量に対するアクセル開度の大きさを切り替えることができる。従って、例えば、アクセル開度、プロペラ回転速度調整の利便性がより向上される。具体的には、例えば、コントロールレバー83の操作量に対するアクセル開度の大きさが比較的小さなモードに切り替えることによって、アクセル開度の微調整が容易となる。よって、推進力、推進速度、プロペラ回転速度の微調整が容易となる。例えば、離着岸時やトローリング時などにおいて、船舶1の推進力及び推進速度を微調整することが容易となる。また、コントロールレバー83の操作量に対するアクセル開度の大きさが比較的大きなモードに切り替えることによって、船舶1の推進力及び推進速度を迅速に調整することが可能となる。
【0120】
特に、本実施形態では、後述のように、第2の動力伝達軸51の回転速度に対する第3の動力伝達軸59の回転速度の比の微調整ができる第2のモードにおいて、コントロールレバー83の操作量に対するアクセル開度の大きさが小さく設定されている。このため、船舶1の推進力及び推進速度の微調整が特に容易である。
【0121】
また、シフト切り替え用油圧式クラッチ61,62が接続状態または切断状態のいずれかに保持される第1のモードにおいて、コントロールレバー83の操作量に対するアクセル開度の大きさが大きく設定されている。このため、船舶1の推進力及び推進速度のより迅速なコントロールが可能となっている。
【0122】
本実施形態では、第2のモードにおいて、シフト切り替え用油圧式クラッチ61,62の接続状態が制御される。これによって、第2の動力伝達軸51の回転速度に対する第3の動力伝達軸59の回転速度の比を微調整することができる。よって、第3の動力伝達軸59の回転速度をより細かに制御することができる。従って、推進力、推進速度の微調整を容易に行うことができる。特に、離着岸時やトローリング時などの低速領域または極低速領域において、推進力、推進速度の微調整を容易に行うことができる。
【0123】
なお、本明細書において、「低速領域」とは、例えば、10〜20km/h程度の速度領域をいう。「極低速領域」とは、例えば、0km/h〜10km/h程度の速度領域をいう。但し、これらの数値範囲は単なる例示である。低速領域と極低速領域の定義は、船舶用推進システムが搭載される船舶の種類によって異なる。
【0124】
本実施形態では、図14に示すように、第3の動力伝達軸59の回転速度が実質的にゼロから第2の動力伝達軸51の回転速度まで連続的に変化するようにシフト切り替え用油圧式クラッチ61,62の接続状態を制御可能である。このため、推進力、推進速度の微調整が特に容易である。
【0125】
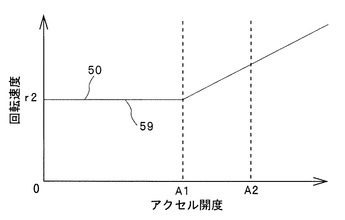
例えば、シフト切り替え用油圧式クラッチ61,62がシフトポジションに合わせて切断状態または接続状態のいずれかに制御されていると、シフトポジションがフォワードまたはリバースにある場合は、図15に示すように、入力軸としての第2の動力伝達軸51の回転速度と出力軸としての第3の動力伝達軸59の回転速度とが実質的に同じに制御される。このため、図15に示すように、第3の動力伝達軸59の回転速度をエンジン30がアイドル回転状態にあるときの第2の動力伝達軸51の回転速度r2よりも低くすることが困難である。従って、プロペラ回転速度を所定の回転速度以下にすることが困難である。その結果、小さな推進力を発生させることが困難である。
【0126】
それに対して本実施形態では、ECU86によって、第2のモードにおいて第3の動力伝達軸59の回転速度の大きさが第2の動力伝達軸51の回転速度の大きさよりも低くなるようにシフト切り替え用油圧式クラッチ61,62の接続状態が制御される。このため、図14に示すように、第3の動力伝達軸59の回転速度をエンジン30がアイドル回転状態にあるときの第2の動力伝達軸51の回転速度r2よりも低くすることができる。従って、プロペラ回転速度を所定の回転速度以下にすることができる。その結果、より小さな推進力を発生させることが可能となる。よって、船舶1を低速で推進させることが容易となる。
【0127】
また、本実施形態では、上述のように、第3の動力伝達軸59の回転速度が実質的にゼロから第2の動力伝達軸51の回転速度まで連続的に変化するようにシフト切り替え用油圧式クラッチ61,62の接続状態を制御可能である。このため、特に小さな推進力を発生させることも可能である。従って、船舶1を極低速で推進させることも可能となる。
【0128】
なお、シフト切り替え用油圧式クラッチ61,62の接続状態の制御方法は、特に限定されない。例えば、本実施形態のように、シフト切り替え用油圧式クラッチ61,62の接続力を調節することで、シフト切り替え用油圧式クラッチ61,62の接続状態を制御してもよい。また、シフト切り替え用油圧式クラッチ61,62の接続時間を調節することで、シフト切り替え用油圧式クラッチ61,62の接続状態を制御してもよい。具体的には、シフト切り替え用油圧式クラッチ61,62が接続される時間とシフト切り替え用油圧式クラッチ61,62が接続されない時間との比率を変更することで、シフト切り替え用油圧式クラッチ61,62の接続状態を制御してもよい。言い換えれば、ある一定周期あたりに占めるシフト切り替え用油圧式クラッチ61,62の接続時間を変更することで、シフト切り替え用油圧式クラッチ61,62の接続状態を制御してもよい。
【0129】
なお、シフト切り替え用油圧式クラッチ61,62の接続力を調節する場合は、本実施形態のように、シフト切り替え用油圧式クラッチ61,62が多板式クラッチであることが好ましい。また、シフト切り替え用油圧式クラッチ61,62を油圧式のクラッチとして、油圧を徐変可能なバルブ72〜74を用いることがより好ましい。これによれば、シフト切り替え用油圧式クラッチ61,62の接続力を容易に調節することができる。
【0130】
一方、シフト切り替え用油圧式クラッチ61,62の接続時間を調節する場合は、シフト切り替え用油圧式クラッチ61,62は、ドッククラッチまたは多板式クラッチのいずれであってもよい。
【0131】
《第2の実施形態》
上記第1の実施形態では、感度切り替え部としてのモード切り替えスイッチ92がコントロールレバー83の操作量を出力し、制御装置91がその出力されたコントロールレバー83の操作量と、感度切り替え信号として出力されたモードとによってエンジン30のスロットル開度を制御する例について説明した。但し、本発明はこの構成に限定されない。
【0132】
例えば、モードに基づく感度切り替えがモード切り替えスイッチ92によって行われるようにしてもよい。具体的には、モード切り替えスイッチ92がコントロールレバー83の操作量と、選択されたモードとに基づいたアクセル開度を出力するようにしてもよい。より具体的には、モード切り替えスイッチ92は、コントロールレバー83の操作量を図9に示すマップに当てはめることによって算出したアクセル開度を出力するものであってもよい。
【0133】
この場合であっても、上記第1の実施形態と同様に、アクセル開度調整の利便性がより向上される。具体的には、例えば、アクセル開度、船舶1の推進力及び推進速度の微調整、アクセル開度、船舶1の推進力及び推進速度の迅速な調整が可能となる。
【0134】
《その他の変形例》
上記実施形態では、第1のモードと第2のモードとの間でモードが切り替えられることによって、コントロールレバーの操作量に対するアクセル開度の大きさと共に、シフト切り替え用油圧式クラッチ61,62の制御が変更される例について説明した。但し、コントロールレバーの操作量に対するアクセル開度の大きさの変更と、シフト切り替え用油圧式クラッチ61,62の制御の変更とは、別個に行われてもよい。具体的には、シフト切り替え用油圧式クラッチ61,62の制御を切り替えるスイッチと、コントロールレバーの操作量に対するアクセル開度の大きさを切り替えるスイッチとを別個に設けてもよい。また、コントロールレバーの操作量に対するアクセル開度の大きさを切り替えるスイッチのみを設けてもよい。
【0135】
上記実施形態では、第1のモードと第2のモードとを切り替えるモード切り替えスイッチ92を設ける例について説明した。但し、本発明においてモード切り替えスイッチ92は必須ではない。
【0136】
例えば、アクセル開度が所定の開度以下であるときに自動的に第2のモードとなり、アクセル開度が所定の開度より大きいときに自動的に第1のモードとなるようにECU86によって制御してもよい。
【0137】
上記実施形態では、コントロールレバー83の操作角度θに対するアクセル開度の大きさが異なる2つのモードが選択可能な例について説明した。但し、モードの種類は2種類に限定されない。例えば、コントロールレバー83の操作角度θに対するアクセル開度の大きさが異なる3つ以上のモードが選択可能であってもよい。
【0138】
具体的には、例えば、極低速モードと、低速モードと、通常モードとの3つのモードが選択可能であってもよい。極低速モードは、離着岸時などの極低速時に使用される。極低速モードでは、コントロールレバー83の操作角度θに対するアクセル開度の大きさが最も小さく設定される。低速モードは、トローリング時などの低速時に使用される。低速モードでは、コントロールレバー83の操作角度θに対するアクセル開度の大きさが比較的小さく設定される。通常モードは、コントロールレバー83の操作角度θに対するアクセル開度の大きさが低速モードや極低速モードと較べて大きく設定される。
【0139】
上記第1の実施形態では、第2のモードにおいて、シフト切り替え用油圧式クラッチ61,62の接続状態とエンジン回転速度との両方が制御される場合について説明した。但し、第2のモードは、エンジン回転速度が制御されずに、シフト切り替え用油圧式クラッチ61,62の接続状態が制御されるモードであってもよい。以下、本実施形態では、第2のモードにおいて、エンジン回転速度が制御されずに、シフト切り替え用油圧式クラッチ61,62の接続状態が制御される場合について説明する。
【0140】
なお、以下の説明において、上記第1の実施形態と実質的に同じ機能を有する部材については同じ符号を用い、詳細な説明を省略する。また、図1〜図9は、本実施形態においても、上記第1の実施形態と共通して参照する。
【0141】
本実施形態では、図16に示すように、ステップS1において第2のモードであると判断された場合は、ステップS4に進む。そして、ステップS4において、アクセル開度に応じてシフト切り替え用油圧式クラッチ61,62の接続状態が制御される。このため、図17に示すように、図11に示すステップS32は行われず、ステップS31に続いてステップS33が行われる。
【0142】
この場合においても、船舶1の推進力の微調整、小さな推進力の発生が可能となる。
【0143】
上記実施形態では、シフトポジション切り替え機構36がひとつの遊星歯車機構60と2つのクラッチ61,62とによって構成されている例について説明した。但し、本発明において、シフトポジション切り替え機構の構成はこれに限定されない。例えば、連動機構部分に配置された前進/後進切り替え機構と、前進/後進切り替え機構とエンジン30との間を断続するクラッチとによってシフトポジション切り替え機構を構成してもよい。
【0144】
上記実施形態では、変速比切り替え機構35を制御するためのマップと、シフトポジション切り替え機構36を制御するためのマップとを船外機20に搭載されたECU86内のメモリ86bに記憶させている。また、電磁バルブ72,73,74を制御するための制御信号を船外機20に搭載されたECU86内のCPU86aから出力させている。
【0145】
但し、本発明は、この構成に限定されない。例えば、船体10に搭載したコントローラー82に、記憶部としてのメモリと、演算部としてのCPUとを、メモリ86b及びCPU86aと共に、またはメモリ86b及びCPU86aに替えて設けてもよい。この場合、コントローラー82に設けられたメモリに変速比切り替え機構35を制御するためのマップと、シフトポジション切り替え機構36を制御するためのマップとを記憶させてもよい。また、コントローラー82に設けられたCPUから電磁バルブ72,73,74を制御するための制御信号を出力させてもよい。
【0146】
上記実施形態では、ECU86がエンジン30と電磁バルブ72,73,74との両方の制御を行う例について説明した。但し、本発明は、これに限定されない。例えば、エンジンを制御するECUと、電磁バルブを制御するECUとを別個に設けてもよい。
【0147】
上記実施形態では、コントローラー82が所謂「電子制御式コントローラー」である例について説明した。ここで、「電子制御式コントローラー」とは、コントロールレバー83の操作量を電気信号に変換すると共に、その電気信号をLAN80に出力するコントローラーをいう。
【0148】
但し、本発明において、コントローラー82は電子制御式コントローラーでなくてもよい。コントローラー82は、例えば所謂機械式コントローラーであってもよい。ここで、「機械式コントローラー」とは、コントロールレバーと、コントロールレバーに接続されたワイヤを備え、コントロールレバーの操作量及び操作方向をワイヤの操作量及び操作方向という物理量として船外機に伝達するコントローラーをいう。
【0149】
上記実施形態では、シフト機構34が変速比切り替え機構35を有する例について説明した。但し、シフト機構34は、変速比切り替え機構35を有さないものであってもよい。例えば、シフト機構34は、シフトポジション切り替え機構36のみを有するものであってもよい。
【0150】
なお、本明細書において、クラッチの接続力とは、クラッチの接続状態を表す値である。すなわち、例えば、「変速比切り替え用油圧式クラッチ53の接続力が100%である」とは、プレート群53bが完全な圧接状態となるように油圧式ピストン53aが駆動され、変速比切り替え用油圧式クラッチ53が完全に接続された状態を意味する。一方、例えば、「変速比切り替え用油圧式クラッチ53の接続力が0%である」とは、油圧式ピストン53aが非駆動状態となることによって、プレート群53bのプレート同士が離間して非圧接状態になり、変速比切り替え用油圧式クラッチ53が完全に切断された状態を意味する。また、例えば、「変速比切り替え用油圧式クラッチ53の接続力が80%である」とは、プレート群53bが圧接状態となるように変速比切り替え用油圧式クラッチ53が駆動され、変速比切り替え用油圧式クラッチ53が完全に接続された状態に対して、入力軸としての第1の動力伝達軸50から出力軸としての第2の動力伝達軸51へ伝達される駆動トルクまたは、第2の動力伝達軸51の回転速度が80%となる状態で接続された、所謂半クラッチ状態であることを意味する。
【図面の簡単な説明】
【0151】
【図1】第1の実施形態に係る船舶の船尾部分を側面視した際の部分断面図である。
【図2】第1の実施形態における推進力発生装置の構成を表す模式的構成図である。
【図3】第1の実施形態におけるシフト機構の模式的断面図である。
【図4】第1の実施形態におけるオイル回路図である。
【図5】船舶の制御ブロック図である。
【図6】第1〜第3の油圧式クラッチの接続状態と、シフト機構のシフトポジションとを表す表である。
【図7】シフト切り替え用油圧クラッチの接続力と、入力軸の回転速度に対する出力軸の回転速度の比との関係を表すグラフである。
【図8】コントロールレバーを表す概念図である。
【図9】コントロールレバーの操作角度とアクセル開度との関係を表すグラフである。図中、M1は、第1のモードにおけるコントロールレバーの操作角度とアクセル開度との関係を表す。図中、M2は、第2のモードにおけるコントロールレバーの操作角度とアクセル開度との関係を表す。
【図10】第1のモードと第2のモードとにおけるプロペラ回転速度の制御を表すフローチャートである。
【図11】第2のモードにおけるプロペラ回転速度の制御を表すフローチャートである。
【図12】アクセル開度とプロペラ回転速度との関係を規定したマップである。
【図13】アクセル開度と、スロットル開度及びシフト切り替え用油圧式クラッチの接続力との関係を規定したマップである。実線で示すグラフはスロットル開度を規定している。破線で示すグラフはシフト切り替え用油圧式クラッチの接続力を規定している。
【図14】スロットル開度とシフト切り替え用油圧式クラッチの接続力がそれぞれの目標値通りに制御された場合の、第2及び第3の動力伝達軸の回転速度とアクセル開度との関係を表すグラフである。
【図15】シフト切り替え用油圧式クラッチ61,62がシフトポジションに合わせて切断状態または接続状態に制御される場合のアクセル開度と、第2及び第3の動力伝達軸の回転速度との関係を表すグラフである。
【図16】変形例における第1のモードと第2のモードとにおけるプロペラ回転速度の制御を表すフローチャートである。
【図17】変形例における第2のモードにおけるプロペラ回転速度の制御を表すフローチャートである。
【図18】ステップS33において行われるクラッチの接続力の調整制御の具体例を表す制御ブロック図である。
【図19】クラッチの接続力の調整量を算出するためのマップである。
【図20】ステップS33において行われる制御を説明するためのタイムチャートの一例である。
【符号の説明】
【0152】
20 船外機(船舶用推進システム)
30 エンジン(動力源)
34 シフト機構
41 プロペラ
50 第1の動力伝達軸(シフト機構の入力軸)
51 第2の動力伝達軸(クラッチの入力軸)
59 第3の動力伝達軸(シフト機構の出力軸、クラッチの出力軸)
61 第1のシフト切り替え用油圧式クラッチ
62 第2のシフト切り替え用油圧式クラッチ
62a 油圧式シリンダ
62b プレート群
70 アクチュエータ
71 オイルポンプ(油圧ポンプ)
72 変速比切り替え用電磁バルブ(バルブ)
73 後進シフト接続用電磁バルブ(バルブ)
74 前進シフト接続用電磁バルブ(バルブ)
75 オイル経路
82 コントローラー(コントロール装置)
83 コントロールレバー
84 アクセル開度センサ(アクセル開度検出部)
86 ECU(電子コントロールユニット)
91 制御装置
92 モード切り替えスイッチ(感度切り替え部)
【技術分野】
【0001】
本発明は船舶用推進システム及びそのコントロール装置に関する。
【背景技術】
【0002】
従来、例えば特許文献1に開示されたように、アクセル開度を調節するためのコントロールレバーを有するコントロール装置が知られている。特許文献1に開示されたコントロール装置では、コントロールレバーの操作量が大きくなるほど、アクセル開度が大きくなる。
【特許文献1】特開2007-283951号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、例えば船舶を離着岸させるときや、トローリングさせるときなどにおいて、プロペラ回転速度を微調節することで、船舶の推進速度を微調節したいときがある。
【0004】
しかしながら、特許文献1に開示されたコントロール装置では、プロペラ回転速度を微調節することが難しいという問題がある。
【0005】
本発明は、かかる点に鑑みてなされたものであり、その目的は、プロペラ回転速度の微調節を容易に行うことができる船舶用推進システムを提供することにある。
【課題を解決するための手段】
【0006】
本発明に係る第1の船舶用推進システムは、動力源と、プロペラと、コントロールレバーと、アクセル開度検出部と、感度切り替え部と、制御装置とを備えている。動力源は、回転力を発生させる。プロペラは、動力源の回転力により駆動される。コントロールレバーには、操船者の操作によってアクセル開度が入力される。アクセル開度検出部は、コントロールレバーの操作量を検出する。アクセル開度検出部は、コントロールレバーの操作量を出力する。感度切り替え部が操船者によって操作されることによって、コントロールレバーの操作量に対するアクセル開度の大きさが切り替えられる。感度切り替え部は、入力されたコントロールレバーの操作量に対するアクセル開度の大きさである感度を感度切り替え信号として出力する。制御装置は、コントロールレバーの操作量と感度切り替え信号とに基づいて動力源の出力を制御する。
【0007】
本発明に係る第2の船舶用推進システムは、動力源と、プロペラと、コントロールレバーと、アクセル開度検出部と、感度切り替え部と、制御装置とを備えている。動力源は、回転力を発生させる。プロペラは、動力源の回転力により駆動される。コントロールレバーには、操船者の操作によってアクセル開度が入力される。アクセル開度検出部は、コントロールレバーの操作量を検出する。アクセル開度検出部は、コントロールレバーの操作量に応じたアクセル開度を出力する。感度切り替え部が操船者によって操作されることによって、コントロールレバーの操作量に対するアクセル開度検出部から出力されるアクセル開度の大きさである感度が切り替えられる。制御装置は、アクセル開度に基づいて動力源の出力を制御する。
【0008】
本発明に係るコントロール装置は、舶用推進システムのコントロール装置である。舶用推進システムは、動力源と、プロペラと、制御装置とを備えている。動力源は、回転力を発生させる。プロペラは、動力源の回転力により駆動される。制御装置は、動力源の出力をアクセル開度に基づいて制御する。本発明に係るコントロール装置は、コントロールレバーと、アクセル開度検出部と、感度切り替え部とを備えている。コントロールレバーには、操船者の操作によってアクセル開度が入力される。アクセル開度検出部は、コントロールレバーの操作量を検出する。アクセル開度検出部は、コントロールレバーの操作量に応じたアクセル開度を出力する。感度切り替え部が操船者によって操作されることによって、コントロールレバーの操作量に対するアクセル開度検出部から出力されるアクセル開度の大きさである感度が切り替えられる。
【発明の効果】
【0009】
本発明によれば、プロペラ回転速度の微調節を容易に行うことができる船舶用推進システムを実現できる。
【発明を実施するための最良の形態】
【0010】
以下、本発明を実施した好ましい形態の一例について、図1に示す船舶用推進システムとしての船外機20を例に挙げて説明する。但し、以下の実施形態は、本発明を実施した好ましい形態の単なる例示である。本発明は、以下の実施形態に限定されるものではない。本発明に係る船舶用推進システムは、例えば、所謂船内機や、所謂スタンドライブであってもよい。スタンドライブは、船内外機ともいう。なお、「スタンドライブ」とは、少なくとも動力源が船体上に載置される船舶用推進システムをいう。「スタンドライブ」には、推進部以外のものが船体上に載置されているものも含まれる。
【0011】
《第1の実施形態》
図1は、第1の実施形態に係る船舶1の船尾11部分を側面視した際の概略的な部分断面図である。図1に示すように、船舶1は、船体10と、船外機20とを備えている。船外機20は、船体10の船尾11に取り付けられている。
【0012】
(船外機20の概略構成)
船外機20は、船外機本体21と、チルト・トリム機構22と、ブラケット23とを備えている。
【0013】
ブラケット23は、マウントブラケット24とスイベルブラケット25とを備えている。マウントブラケット24は、船体10に固定されている。スイベルブラケット25は、マウントブラケット24に対して、旋回軸26を中心として揺動可能である。
【0014】
チルト・トリム機構22は、船外機本体21をチルト操作及びトリム操作するためのものである。具体的には、スイベルブラケット25をマウントブラケット24に対して揺動操作するためのものである。
【0015】
船外機本体21は、ケーシング27と、カウリング28と、推進力発生装置29とを備えている。推進力発生装置29は、後述する推進部33の一部を除いて、ケーシング27とカウリング28との内部に配置されている。
【0016】
図1及び図2に示すように、推進力発生装置29は、エンジン30と、動力伝達機構32と、推進部33とを備えている。
【0017】
なお、本実施形態では、船外機20が動力源としてエンジン30を有する例について説明する。但し、動力源は、回転力を発生させることができるものである限り、特に限定されない。例えば、動力源は、電動モーターであってもよい。
【0018】
エンジン30は、図5に示すスロットルボディ87を有する燃料噴射式のエンジンである。エンジン30では、スロットル開度を調節することで、エンジン回転速度及びエンジン出力が調節される。エンジン30は、回転力を発生させる。図1に示すように、エンジン30は、クランクシャフト31を備えている。エンジン30は、発生した回転力を、クランクシャフト31を通じて出力する。
【0019】
動力伝達機構32は、エンジン30と推進部33との間に配置されている。動力伝達機構32は、エンジン30において発生した回転力を推進部33に伝達する。動力伝達機構32は、シフト機構34と、減速機構37と、連動機構38とを備えている。
【0020】
シフト機構34は、エンジン30のクランクシャフト31に接続されている。図2に示すように、シフト機構34は、変速比切り替え機構35と、シフトポジション切り替え機構36とを備えている。
【0021】
変速比切り替え機構35は、エンジン30と推進部33との間の変速比を高速変速比(HIGH)と低速変速比(LOW)との間で切り替える。ここで、「高速変速比」とは、出力側回転速度の入力側回転速度に対する比が比較的大きい変速比をいう。一方、「低速変速比」とは、出力側回転速度の入力側回転速度に対する比が比較的小さい変速比をいう。
【0022】
シフトポジション切り替え機構36は、シフトポジションをフォワード、リバース及びニュートラルとの間で切り替える。
【0023】
減速機構37は、シフト機構34と推進部33との間に配置されている。減速機構37は、シフト機構34からの回転力を、回転速度を減速して推進部33側に伝達する。なお、減速機構37の構造は、特に限定されない。減速機構37は、例えば、遊星歯車機構を有するものであってもよい。また、減速機構37は、例えば、減速ギア対を有するものであってもよい。
【0024】
連動機構38は、減速機構37と推進部33との間に配置されている。連動機構38は、図示しないベベルギア組を備えている。連動機構38は、減速機構37からの回転力を、方向を変えて推進部33に伝達させる。
【0025】
推進部33は、プロペラ軸40と、プロペラ41とを備えている。プロペラ軸40は、連動機構38からの回転力をプロペラ41に伝達する。推進部33は、エンジン30において発生した回転力を推進力に変換する。
【0026】
図1に示すように、プロペラ41は、第1のプロペラ41aと第2のプロペラ41bとの2つのプロペラを含んでいる。第1のプロペラ41aの螺旋方向と、第2のプロペラ41bの螺旋方向とは相互に逆方向である。動力伝達機構32から出力される回転力が正転方向であるとき、第1のプロペラ41aと第2のプロペラ41bとは互いに逆方向に回転し、前進方向の推進力が発生する。よって、シフトポジションがフォワードとなる。一方、動力伝達機構32から出力される回転力が逆転方向であるとき、第1のプロペラ41aと第2のプロペラ41bとのそれぞれは、前進時とは逆方向に回転する。これによって、後進方向の推進力が発生する。よって、シフトポジションがリバースとなる。
【0027】
なお、プロペラ41は、単一のプロペラまたは3つ以上のプロペラにより構成されていてもよい。
【0028】
(シフト機構34の詳細構造)
次に、主として図3を参照しながら、本実施形態におけるシフト機構34の構造について詳細に説明する。なお、図3は、シフト機構34を模式化して表している。このため、図3に示すシフト機構34の構造は、実際のシフト機構34の構造と厳密には一致しない。
【0029】
シフト機構34は、シフトケース45を備えている。シフトケース45は、外観視略円柱状である。シフトケース45は、第1のケース45aと、第2のケース45bと、第3のケース45cと、第4のケース45dとを備えている。第1のケース45aと、第2のケース45bと、第3のケース45cと、第4のケース45dとは、ボルトなどによって一体に固定されている。
【0030】
<変速比切り替え機構35>
変速比切り替え機構35は、入力軸としての第1の動力伝達軸50と、出力軸としての第2の動力伝達軸51と、変速ギア群としての遊星歯車機構52と、変速比切り替え用油圧式クラッチ53とを備えている。
【0031】
遊星歯車機構52は、第1の動力伝達軸50の回転を、低速変速比(LOW)または高速変速比(HIGH)で第2の動力伝達軸51に伝達する。遊星歯車機構52の変速比は、変速比切り替え用油圧式クラッチ53の断続により切り替えられる。
【0032】
第1の動力伝達軸50と第2の動力伝達軸51とは、同軸上に配置されている。第1の動力伝達軸50は、第1のケース45aによって回転可能に支持されている。第2の動力伝達軸51は、第2のケース45bと第3のケース45cとによって回転可能に支持されている。第1の動力伝達軸50は、クランクシャフト31に接続されている。また、第1の動力伝達軸50は、遊星歯車機構52に接続されている。
【0033】
遊星歯車機構52は、サンギア54と、リングギア55と、キャリア56と、複数のプラネタリギア57とを備えている。リングギア55は、略円筒状に形成されている。リングギア55の内周面に、プラネタリギア57と噛合する歯が形成されている。リングギア55は、第1の動力伝達軸50に接続されている。リングギア55は、第1の動力伝達軸50と共に回転する。
【0034】
サンギア54は、リングギア55の内部に配置されている。サンギア54とリングギア55とは同軸で回転する。サンギア54は、ワンウェイクラッチ58を介して、第2のケース45bに取り付けられている。ワンウェイクラッチ58は、正転方向の回転を許容する一方、逆転方向の回転を規制する。このため。サンギア54は、正転可能である一方、逆転不能である。
【0035】
サンギア54とリングギア55との間には、複数のプラネタリギア57が配置されている。各プラネタリギア57は、サンギア54とリングギア55との両方と噛合している。各プラネタリギア57は、キャリア56によって回転可能に支持されている。このため、複数のプラネタリギア57は、各々が回転しながら、第1の動力伝達軸50の軸心回りを相互に同速度で旋回する。
【0036】
なお、本明細書において、「回転」とは、部材が、その部材内に位置する軸を中心として回ることをいう。一方、「旋回」とは、部材が、その部材の外に位置する軸を中心として回ることをいう。
【0037】
キャリア56は、第2の動力伝達軸51に接続されている。キャリア56は、第2の動力伝達軸51と共に回転する。
【0038】
キャリア56とサンギア54との間には、変速比切り替え用油圧式クラッチ53が配置されている。本実施形態では、この変速比切り替え用油圧式クラッチ53は、湿式多板式クラッチである。但し、本発明において、変速比切り替え用油圧式クラッチ53は、湿式多板式クラッチに限定されない。変速比切り替え用油圧式クラッチ53は、乾式多板式クラッチであってもよく、所謂ドッグクラッチであってもよい。
【0039】
なお、本明細書において「多板式クラッチ」とは、相互に回転可能な第1の部材及び第2の部材と、第1の部材と共に回転する1または複数の第1のプレートと、第2の部材と共に回転する1または複数の第2のプレートとを備え、第1のプレートと第2のプレートとが圧接されることによって第1の部材と第2の部材との回転が規制されるクラッチをいう。本明細書において「クラッチ」は、回転力が入力される入力軸と、回転力が出力される出力軸との間に配置され、前記入力軸と前記出力軸との間を断続させるものに限定されない。
【0040】
変速比切り替え用油圧式クラッチ53は、油圧式のピストン53aと、クラッチプレート及びフリクションプレートを含むプレート群53bとを備えている。ピストン53aが駆動されることで、プレート群53bが圧接状態となる。このため、変速比切り替え用油圧式クラッチ53が接続状態となる。一方、ピストン53aが非駆動状態のときは、プレート群53bが非圧接状態となる。このため、変速比切り替え用油圧式クラッチ53が切断状態となる。
【0041】
変速比切り替え用油圧式クラッチ53が接続状態となると、サンギア54とキャリア56とが相互に固定された状態となる。このため、プラネタリギア57の旋回に伴って、サンギア54とキャリア56とが一体に回転する。
【0042】
<シフトポジション切り替え機構36>
シフトポジション切り替え機構36は、フォワードと、リバースと、ニュートラルとを切り替える。シフトポジション切り替え機構36は、入力軸としての第2の動力伝達軸51と、出力軸としての第3の動力伝達軸59と、回転方向切り替え機構としての遊星歯車機構60と、第1のシフト切り替え用油圧式クラッチ61と、第2のシフト切り替え用油圧式クラッチ62とを備えている。
【0043】
第1のシフト切り替え用油圧式クラッチ61と、第2のシフト切り替え用油圧式クラッチ62とは、入力軸としての第2の動力伝達軸51と、出力軸としての第3の動力伝達軸59との間を断続する。具体的には、第1のシフト切り替え用油圧式クラッチ61と、第2のシフト切り替え用油圧式クラッチ62とが断続されることによって、第2の動力伝達軸51と第3の動力伝達軸59との間の接続状態が変化する。言い換えれば、第1のシフト切り替え用油圧式クラッチ61と、第2のシフト切り替え用油圧式クラッチ62とは、第2の動力伝達軸51と第3の動力伝達軸59との間の接続状態を変化させるためのものである。具体的には、第1のシフト切り替え用油圧式クラッチ61と、第2のシフト切り替え用油圧式クラッチ62との接続力が調整されることによって、第2の動力伝達軸51の回転速度に対する第3の動力伝達軸59の回転速度が調節される。より具体的には、第1のシフト切り替え用油圧式クラッチ61と、第2のシフト切り替え用油圧式クラッチ62との接続力が調整されることによって、第2の動力伝達軸51の回転方向に対する第3の動力伝達軸59の回転方向、及び第2の動力伝達軸51の回転速度の絶対値に対する第3の動力伝達軸59の回転速度の絶対値の比が調節される。
【0044】
遊星歯車機構52は、第2の動力伝達軸51の回転方向に対する第3の動力伝達軸59の回転方向を切り替える。具体的には、遊星歯車機構52は、第2の動力伝達軸51の回転力を、正転方向または逆転方向の回転力として第3の動力伝達軸59に伝達する。遊星歯車機構52が伝達する回転力の回転方向は、第1のシフト切り替え用油圧式クラッチ61と、第2のシフト切り替え用油圧式クラッチ62との断続によって切り替えられる。
【0045】
第3の動力伝達軸59は、第3のケース45cと第4のケース45dとにより回転可能に支持されている。第2の動力伝達軸51と、第3の動力伝達軸59とは同軸上に配置されている。本実施形態では、油圧式クラッチ61,62は湿式多板式クラッチである。但し、油圧式クラッチ61,62は、それぞれドッグクラッチであってもよい。
【0046】
なお、第2の動力伝達軸51は、変速比切り替え機構35とシフトポジション切り替え機構36とが共有する部材である。
【0047】
遊星歯車機構60は、サンギア63と、リングギア64と、複数のプラネタリギア65と、キャリア66とを備えている。
【0048】
キャリア66は、第2の動力伝達軸51に接続されている。キャリア66は、第2の動力伝達軸51と共に回転する。このため、第2の動力伝達軸51の回転に伴って、キャリア66が回転すると共に、複数のプラネタリギア65が相互に同じ速度で旋回する。
【0049】
複数のプラネタリギア65は、リングギア64と、サンギア63とに噛合している。リングギア64と第3のケース45cとの間には、第1のシフト切り替え用油圧式クラッチ61が配置されている。第1のシフト切り替え用油圧式クラッチ61は、油圧式のピストン61aと、クラッチプレートとフリクションプレートとを含むプレート群61bとを備えている。この油圧式のピストン61aが駆動されることで、プレート群61bが圧接状態となる。このため、第1のシフト切り替え用油圧式クラッチ61が接続状態となる。その結果、リングギア64が第3のケース45cに対して固定され、回転不能となる。一方、油圧式のピストン61aが非駆動状態のときは、プレート群61bが非圧接状態となる。このため、第1のシフト切り替え用油圧式クラッチ61が非接続状態となる。その結果、リングギア64が第3のケース45cに対して非固定状態となり、回転可能となる。
【0050】
キャリア66とサンギア63との間には、第2のシフト切り替え用油圧式クラッチ62が配置されている。第2のシフト切り替え用油圧式クラッチ62は、油圧式のピストン62aと、クラッチプレート及びフリクションプレートを含むプレート群62bとを備えている。この油圧式のピストン62aが駆動されることで、プレート群62bが圧接状態となる。このため、第2のシフト切り替え用油圧式クラッチ62が接続状態となる。その結果、キャリア66とサンギア63とが一体に回転する。一方、油圧式のピストン62aが非駆動状態のときは、プレート群62bが非圧接状態となる。このため、第2のシフト切り替え用油圧式クラッチ62が非接続状態となる。その結果、リングギア64とサンギア63とが相互に回転可能となる。
【0051】
なお、遊星歯車機構60の減速比は、1:1に限定されない。遊星歯車機構60は、1:1とは異なる減速比を有するものであってもよい。また、遊星歯車機構60が正転方向の回転として回転力を伝達する場合と、逆転方向の回転として回転力を伝達させる場合とで、遊星歯車機構60の減速比は同じであってもよいし、異なっていてもよい。
【0052】
本実施形態では、遊星歯車機構60が1:1とは異なる減速比を有し、且つ遊星歯車機構60が正転方向の回転として回転力を伝達する場合と、逆転方向の回転として回転力を伝達させる場合とで減速比が異なる場合について説明する。
【0053】
具体的に、本実施形態では、第1の動力伝達軸50の回転速度と、第3の動力伝達軸59の回転速度との比は、以下のようになっている。
高速フォワード : 1:1、減速比1
高速リバース : 1:1.08、減速比0.93
低速フォワード : 1:0.77、減速比1.3
低速リバース : 1:0.83、減速比1.21
【0054】
図2に示すように、シフト機構34は、制御装置91によって制御される。具体的には、変速比切り替え用油圧式クラッチ53と、第1のシフト切り替え用油圧式クラッチ61と、第2のシフト切り替え用油圧式クラッチ62との断続が制御装置91によって制御される。
【0055】
制御装置91は、アクチュエータ70と、電子コントロールユニットとしてのelectronic control unit(ECU)86とを備えている。アクチュエータ70は、変速比切り替え用油圧式クラッチ53と、第1のシフト切り替え用油圧式クラッチ61と、第2のシフト切り替え用油圧式クラッチ62とを断続させる。Electronic control unit86は、アクチュエータ70を制御する。
【0056】
具体的には、図4に示すように、油圧式シリンダ53a、61a、62aは、アクチュエータ70によって駆動される。アクチュエータ70は、オイルポンプ71と、オイル経路75と、変速比切り替え用電磁バルブ72と、後進シフト接続用電磁バルブ73と、前進シフト接続用電磁バルブ74とを備えている。
【0057】
オイルポンプ71は、オイル経路75によって油圧式シリンダ53a、61a、62aに接続されている。変速比切り替え用電磁バルブ72は、オイルポンプ71と油圧式シリンダ53aとの間に配置されている。この変速比切り替え用電磁バルブ72によって油圧式シリンダ53aの油圧が調節される。後進シフト接続用電磁バルブ73は、オイルポンプ71と油圧式シリンダ61aとの間に配置されている。後進シフト接続用電磁バルブ73によって油圧式シリンダ61aの油圧が調節される。前進シフト接続用電磁バルブ74は、オイルポンプ71と油圧式シリンダ62aとの間に配置されている。前進シフト接続用電磁バルブ74によって油圧式シリンダ62aの油圧が調節される。
【0058】
変速比切り替え用電磁バルブ72と、後進シフト接続用電磁バルブ73と、前進シフト接続用電磁バルブ74とのそれぞれは、オイル経路75の経路面積を徐変可能である。このため、変速比切り替え用電磁バルブ72と、後進シフト接続用電磁バルブ73と、前進シフト接続用電磁バルブ74とを用いることによって、油圧式シリンダ53a、61a、62aの押圧力を徐変させることができる。従って、油圧式クラッチ53,61,62の接続力の徐変が可能となっている。よって、図7に示すように、第2の動力伝達軸51の回転速度に対する第3の動力伝達軸59の比を調節することができる。その結果、入力軸としての第2の動力伝達軸51の回転速度に対する出力軸としての第3の動力伝達軸59の回転速度の比を実質的に連続的に調節することができる。
【0059】
本実施形態では、変速比切り替え用電磁バルブ72と、後進シフト接続用電磁バルブ73と、前進シフト接続用電磁バルブ74とのそれぞれは、PWM(Pulse Width Modulation)制御されるソレノイドバルブにより構成されている。但し、変速比切り替え用電磁バルブ72と、後進シフト接続用電磁バルブ73と、前進シフト接続用電磁バルブ74とのそれぞれは、PWM制御されるソレノイドバルブ以外のバルブにより構成されていてもよい。例えば、変速比切り替え用電磁バルブ72と、後進シフト接続用電磁バルブ73と、前進シフト接続用電磁バルブ74とのそれぞれは、オン−オフ制御されるソレノイドバルブによって構成されていてもよい。
【0060】
(シフト機構34の変速動作)
次に、シフト機構34の変速動作について、主として図3と図6を参照しつつ詳細に説明する。図6は、油圧式クラッチ53,61,62の接続状態と、シフト機構34のシフトポジションとを表す表である。シフト機構34では、第1〜第3の油圧式クラッチ53,61,62の断続によって、シフトポジションが切り替えられる。
【0061】
<低速変速比と高速変速比との切り替え>
低速変速比と高速変速比との切り替えは変速比切り替え機構35において行われる。具体的には、変速比切り替え用油圧式クラッチ53の操作によって低速変速比と高速変速比とが切り替えられる。詳細には、変速比切り替え用油圧式クラッチ53が切断状態にある場合に、変速比切り替え機構35の変速比が「低速変速比」となる。一方、変速比切り替え用油圧式クラッチ53が接続状態である場合に、変速比切り替え機構35の変速比が「高速変速比」となる。
【0062】
図3に示すように、リングギア55は第1の動力伝達軸50に接続されている。このため、第1の動力伝達軸50の回転に伴って、リングギア55が正転方向に回転する。ここで、変速比切り替え用油圧式クラッチ53が切断状態にある場合、キャリア56とサンギア54とは相互に回転可能となっている。よって、プラネタリギア57が回転すると共に旋回する。その結果、サンギア54が逆転方向に回転しようとする。
【0063】
しかしながら、図6に示すように、ワンウェイクラッチ58は、サンギア54の逆転方向回転を阻止する。このため、サンギア54はワンウェイクラッチ58によって固定される。その結果、リングギア55の回転に伴ってサンギア54とリングギア55との間でプラネタリギア57が旋回することで、キャリア56と共に第2の動力伝達軸51が回転する。この場合、プラネタリギア57は旋回すると共に回転するため、第1の動力伝達軸50の回転は、減速されて第2の動力伝達軸51に伝達される。従って、変速比切り替え機構35の変速比が「低速変速比」となる。
【0064】
一方、変速比切り替え用油圧式クラッチ53が接続状態にある場合、プラネタリギア57とサンギア54とが一体に回転する。よって、プラネタリギア57の回転が禁止される。従って、プラネタリギア57とキャリア56とサンギア54とがリングギア55の回転に伴ってリングギア55と同じ回転速度で正転方向に回転する。ここで、図6に示すように、ワンウェイクラッチ58は、サンギア54の正転を許容する。その結果、第1の動力伝達軸50と第2の動力伝達軸51とが実質的に同じ回転速度で正転方向に回転する。言い換えれば、第2の動力伝達軸51に第1の動力伝達軸50の回転力が同じ回転速度且つ同じ回転方向で伝達される。従って、変速比切り替え機構35の変速比が「高速変速比」となる。
【0065】
<フォワード、リバース及びニュートラルの切り替え>
フォワード、リバース及びニュートラルの切り替えは、シフトポジション切り替え機構36において行われる。具体的には、第1のシフト切り替え用油圧式クラッチ61と第2のシフト切り替え用油圧式クラッチ62との操作によってフォワード、リバース及びニュートラルの切り替えが行われる。
【0066】
第1のシフト切り替え用油圧式クラッチ61が切断状態である一方、第2のシフト切り替え用油圧式クラッチ62が接続状態である場合に、シフトポジション切り替え機構36のシフトポジションが「フォワード」となる。第1のシフト切り替え用油圧式クラッチ61が切断状態である場合、リングギア64は、シフトケース45に対して回転可能である。第2のシフト切り替え用油圧式クラッチ62は接続状態にある場合、キャリア66とサンギア63及び第3の動力伝達軸59とは一体に回転する。このため、第1のシフト切り替え用油圧式クラッチ61が接続状態である一方、第2のシフト切り替え用油圧式クラッチ62は接続状態にある場合、第2の動力伝達軸51とキャリア66とサンギア63と第3の動力伝達軸59とが一体に正転方向に回転する。従って、シフトポジション切り替え機構36のシフトポジションが「フォワード」となる。
【0067】
第1のシフト切り替え用油圧式クラッチ61が接続状態である一方、第2のシフト切り替え用油圧式クラッチ62が切断状態である場合に、シフトポジション切り替え機構36のシフトポジションが「リバース」となる。第1のシフト切り替え用油圧式クラッチ61が接続状態である一方、第2のシフト切り替え用油圧式クラッチ62は切断状態にある場合、リングギア64はシフトケース45によって回転規制される。一方、サンギア63は、キャリア66に対して回転可能となる。従って、第2の動力伝達軸51が正転方向に回転するにともなって、プラネタリギア65が回転しながら旋回する。その結果、サンギア63と第3の動力伝達軸59とが逆転方向に回転する。従って、シフトポジション切り替え機構36のシフトポジションが「リバース」となる。
【0068】
また、第1のシフト切り替え用油圧式クラッチ61と第2のシフト切り替え用油圧式クラッチ62との両方が切断状態である場合に、シフトポジション切り替え機構36のシフトポジションが「ニュートラル」となる。第1のシフト切り替え用油圧式クラッチ61と第2のシフト切り替え用油圧式クラッチ62との両方が切断状態にある場合、遊星歯車機構60は空転状態となる。このため、第2の動力伝達軸51の回転は第3の動力伝達軸59へと伝達されない。従って、シフトポジション切り替え機構36のシフトポジションが「ニュートラル」となる。
【0069】
以上説明したように、低速変速比と高速変速比との間の切り替え、及びシフトポジションの切り替えが行われる。従って、図6に示すように、変速比切り替え用油圧式クラッチ53及び第1のシフト切り替え用油圧式クラッチ61が切断状態にある一方、第2のシフト切り替え用油圧式クラッチ62が接続状態にある場合に、シフト機構34のシフトポジションが「低速フォワード」となる。
【0070】
変速比切り替え用油圧式クラッチ53と第2のシフト切り替え用油圧式クラッチ62とが接続状態である一方、第1のシフト切り替え用油圧式クラッチ61が切断状態である場合に、シフト機構34のシフトポジションが「高速フォワード」となる。
【0071】
第1のシフト切り替え用油圧式クラッチ61及び第2のシフト切り替え用油圧式クラッチ62との両方が切断状態の場合に、変速比切り替え用油圧式クラッチ53の接続状態に関わらず、シフト機構34のシフトポジションが「ニュートラル」となる。
【0072】
変速比切り替え用油圧式クラッチ53と第2のシフト切り替え用油圧式クラッチ62とが切断状態にある一方、第1のシフト切り替え用油圧式クラッチ61が接続状態にある場合に、シフト機構34のシフトポジションが「低速リバース」となる。
【0073】
また、変速比切り替え用油圧式クラッチ53と第1のシフト切り替え用油圧式クラッチ61とが接続状態にある一方、第2のシフト切り替え用油圧式クラッチ62が切断状態にある場合に、シフト機構34のシフトポジションが「高速リバース」となる。
【0074】
(船舶1の制御ブロック)
次に主として図5を参照しながら船舶1の制御ブロックについて説明する。
【0075】
まず、図5を参照して、船外機20の制御ブロックについて説明する。船外機20には、ECU86が配置されている。ECU86は、図2に描画された制御装置91の一部を構成している。このECU86によって、船外機20の各機構が制御される。
【0076】
ECU86は、演算部としてのCPU(central processing unit)86aとメモリ86bとを備えている。メモリ86bには、後述するマップなどの各種設定などが記憶されている。メモリ86bは、CPU86aに接続されている。CPU86aは、各種演算を行う際に、メモリ86bに格納された必要な情報を読み出す。また、CPU86aは、必要に応じて、演算結果をメモリ86bに出力し、メモリ86bに演算結果などを記憶させる。
【0077】
ECU86には、エンジン30のスロットルボディ87が接続されている。スロットルボディ87は、このECU86によって制御される。これにより、エンジン30のスロットル開度が制御される。具体的には、コントロールレバー83の操作量と、感度切り替え信号とに基づいてエンジン30のスロットル開度が制御される。その結果、エンジン30の出力が制御される。
【0078】
また、ECU86には、エンジン回転速度センサ88が接続されている。エンジン回転速度センサ88は、図1に示すエンジン30のクランクシャフト31の回転速度を検出する。エンジン回転速度センサ88は、検出したエンジン回転速度をECU86に出力する。
【0079】
推進部33には、プロペラ回転速度センサ90が配置されている。プロペラ回転速度センサ90は、プロペラ41の回転速度を検出する。プロペラ回転速度センサ90は、検出した回転速度をECU86に対して出力する。なお、プロペラ41の回転速度とプロペラ軸40の回転速度とは相互に実質的に同じである。従って、プロペラ回転速度センサ90は、プロペラ軸40の回転速度を検出するものであってもよい。
【0080】
また、ECU86には、変速比切り替え用電磁バルブ72と、前進シフト接続用電磁バルブ74と、後進シフト接続用電磁バルブ73とが接続されている。変速比切り替え用電磁バルブ72と、前進シフト接続用電磁バルブ74と、後進シフト接続用電磁バルブ73との開閉及び開度調整は、このECU86によって制御される。
【0081】
図5に示すように、船舶1は、local area network (LAN)80を備えている。LAN80は、船体10に巡らされている。船舶1では、このLAN80を介して装置間の信号の送受信が行われている。
【0082】
LAN80には、船外機20のECU86、コントローラー82及び表示装置81などが接続されている。表示装置81は、ECU86から出力された情報や、後述するコントローラー82から出力された情報を表示させる。具体的には、表示装置81は、船舶1の現在のスピード、シフトポジションなどを表示させる。
【0083】
コントローラー82は、コントロールレバー83と、アクセル開度センサ84と、シフトポジションセンサ85と、モード切り替えスイッチ92とを備えている。
【0084】
コントロールレバー83には、船舶1の操船者の操作によってシフトポジションやアクセル開度が入力される。具体的に、操船者がコントロールレバー83を操作すると、コントロールレバー83の位置に応じたアクセル開度及びシフトポジションが、アクセル開度センサ84とシフトポジションセンサ85とのそれぞれによって検出される。アクセル開度センサ84とシフトポジションセンサ85とのそれぞれは、LAN80に接続されている。アクセル開度センサ84とシフトポジションセンサ85とは、それぞれアクセル開度信号とシフトポジション信号とをLAN80に対して送信する。ECU86は、アクセル開度センサ84とシフトポジションセンサ85とから出力されたアクセル開度信号やシフトポジション信号を、LAN80を介して受信する。
【0085】
具体的には、コントロールレバー83の操作部83aが図8において「N」で示された中立領域に位置するときに、シフトポジションセンサ85は、ニュートラルに対応したシフトポジション信号を出力する。コントロールレバー83の操作部83aが図8において「F」で示された前進領域に位置するときに、シフトポジションセンサ85は、フォワードに対応したシフトポジション信号を出力する。コントロールレバー83の操作部83aが図8において「R」で示された後進領域に位置するときに、シフトポジションセンサ85は、リバースに対応したシフトポジション信号を出力する。
【0086】
アクセル開度センサ84は、操作部83aの操作量を検出する。具体的には、アクセル開度センサ84は、操作部83aが中央位置からどれだけ操作されたかを表す操作角度θを検出する。操作部83aは、その操作角度θをアクセル開度信号として出力する。
【0087】
図5に示すモード切り替えスイッチ92には、操船者の操作によって第1のモードと第2のモードとのいずれかが入力される。ここで、「第1のモード」では、図9のM1に示すように、コントロールレバー83の操作角度θに対するアクセル開度の大きさが比較的大きなモードである。一方、「第2のモード」とは、図9のM2に示すように、コントロールレバー83の操作角度θに対するアクセル開度の大きさが比較的小さなモードである。すなわち、第1のモードと第2のモードとは、コントロールレバー83の操作角度θに対するアクセル開度の大きさが相互に異なるモードである。
【0088】
モード切り替えスイッチ92は、第1のモード及び第2のモードのうちの入力されたモードに応じた信号をECU86に対して出力する。本実施形態では、この「入力されたモードに応じた信号」が感度切り替え信号となる。
【0089】
操船者がモード切り替えスイッチ92を操作することによって第1のモードが選択されると、CPU86aは、入力されたアクセル開度信号に基づいて、メモリ86bに記憶された図9に示すマップM1を参照してアクセル開度を決定する。一方、操船者がモード切り替えスイッチ92を操作することによって第2のモードが選択されると、CPU86aは、入力されたアクセル開度信号に基づいて、メモリ86bに記憶された図9に示すマップM2を参照してアクセル開度を決定する。
【0090】
(船舶1の制御)
次に、船舶1の制御について説明する。
【0091】
<船舶1の基本的制御>
船舶1の操船者によりコントロールレバー83が操作されると、アクセル開度センサ84とシフトポジションセンサ85とによってコントロールレバー83の操作状況に応じたアクセル開度とシフトポジションとが検出される。検出されたアクセル開度とシフトポジションとは、LAN80に送信される。ECU86は、LAN80を介して出力されたアクセル開度信号とシフトポジション信号とを受信する。ECU86は、アクセル開度信号と図9に示すマップとから得られるアクセル開度に基づいてスロットルボディ87及び油圧式クラッチ61,62を制御する。ECU86は、これによってプロペラ回転速度の制御を行う。
【0092】
また、ECU86は、シフトポジション信号に応じてシフト機構34を制御する。具体的には、「低速フォワード」のシフトポジション信号を受信した場合は、変速比切り替え用電磁バルブ72を駆動させて変速比切り替え用油圧式クラッチ53を切断すると共に、支部と接続用電磁バルブ73,74を駆動させて第1のシフト切り替え用油圧式クラッチ61を切断させる一方、第2のシフト切り替え用油圧式クラッチ62を接続させる。これにより、シフトポジションが「低速フォワード」に切り替えられる。
【0093】
<船舶1の具体的制御>
(1)第1のモードと第2のモードとにおけるプロペラ回転速度の制御
船外機20が稼働している際には、図10に示す制御が繰り返し行われる。図10に示すように、船外機20が稼働されているとき、まずステップS1において、モードが判断される。ステップS1において、第1のモードであると判断された場合は、ステップS2に進む。ステップS2において、シフト切り替え用油圧式クラッチ61,62の接続力は調節されず、アクセル開度に基づいてエンジン出力が調節される。シフト切り替え用油圧式クラッチ61,62は、選択されているシフトポジションに応じて切断状態または接続状態にされている。より具体的には、シフト切り替え用油圧式クラッチ61,62の接続力が実質的に0%または実質的に100%とされる。
【0094】
このため、シフト切り替え用油圧式クラッチ61,62の一方が接続された状態では、入力軸としての第2の動力伝達軸51の回転速度の大きさと、出力軸としての第3の動力伝達軸59の回転速度の大きさとが実質的に同じになるように制御される。具体的には、入力軸としての第2の動力伝達軸51の回転速度と、出力軸としての第3の動力伝達軸59の回転速度とが実質的に同じになるように制御される。なお、「回転速度の大きさが実質的に同じ」とは、回転速度の絶対値が同じであることを意味し、回転方向は同じであっても逆であってもよい。
【0095】
但し、上述のように、遊星歯車機構60の減速比は、減速比が1:1でなくてもよい。遊星歯車機構60の減速比が1:1ではない場合は、入力軸としての第2の動力伝達軸51の回転速度の大きさと、出力軸としての第3の動力伝達軸59の回転速度の大きさとが完全に同じにはならない。本実施形態において、「回転速度の大きさが実質的に同じ」には、回転速度の大きさの差が1割程度であることが含まれるものとする。
【0096】
一方、ステップS1において、第2のモードであると判断された場合は、ステップS3に進む。ステップS3では、アクセル開度に応じてエンジン回転速度と共にシフト切り替え用油圧式クラッチ61,62の接続力が調節される。以下、ステップS3において行われる第2のモードにおけるプロペラ回転速度の具体的な制御内容について、図11を主として参照しながら詳細に説明する。
【0097】
図11に示すように、第2のモードでは、まず、ステップS31において、目標プロペラ回転速度、目標スロットル開度及びシフト切り替え用油圧式クラッチ61,62の目標接続力が算出される。
【0098】
具体的に、CPU986aは、メモリ86bに記憶された図12に示すマップを読み出す。図12に示すマップは、プロペラ回転速度とアクセル開度との関係を規定したものである。CPU86aは、この図12に示すマップにアクセル開度信号から算出されたアクセル開度を当てはめることによってプロペラ41の目標回転速度を算出する。
【0099】
CPU86aは、メモリ86bに記憶された図13に示すマップを読み出す。図13に示すマップは、アクセル開度と、スロットル開度及びシフト切り替え用油圧式クラッチ61,62の接続力との関係を規定したものである。具体的に、図13に実線で示すグラフがスロットル開度を規定している。図13に破線で示すグラフがシフト切り替え用油圧式クラッチ61,62の接続力を規定している。CPU86aは、この図13に示すマップに算出されたアクセル開度を当てはめることによって目標スロットル開度及びシフト切り替え用油圧式クラッチ61,62の目標接続力を算出する。
【0100】
なお、図13に示すように、アクセル開度が所定のアクセル開度A1以下の場合は、アクセル開度に関わらず目標スロットル開度はT1となる。なお、T1は、エンジン30がアイドル状態にあるときのスロットル開度Taよりも若干大きな値に設定されている。このため、アクセル開度が所定のアクセル開度A1以下のときは、エンジン回転速度は略一定に保持される。
【0101】
一方、アクセル開度が所定のアクセル開度A1以上の場合は、アクセル開度の増大に伴って目標スロットル開度が大きくなるように設定されている。このため、アクセル開度が所定のアクセル開度A1以上のときはアクセル開度に応じてエンジン回転速度が調節される。
【0102】
また、アクセル開度が所定のアクセル開度A1以下のときは、アクセル開度の増大に伴って、シフト切り替え用油圧式クラッチ61,62の目標接続力が大きくなるように設定されている。アクセル開度が所定のアクセル開度A1より大きくA2よりも小さいときもアクセル開度の増大に伴って、シフト切り替え用油圧式クラッチ61,62の目標接続力が大きくなるように設定されている。但し、アクセル開度が所定のアクセル開度A1より大きくA2よりも小さいときのアクセル開度に対するシフト切り替え用油圧式クラッチ61,62の目標接続力の変化率は、アクセル開度が所定のアクセル開度A1以下のときのアクセル開度に対するシフト切り替え用油圧式クラッチ61,62の目標接続力の変化率よりも小さく設定されている。アクセル開度が所定のアクセル開度A2より大きいときは、アクセル開度に関わらずシフト切り替え用油圧式クラッチ61,62の接続力は一定となる。
【0103】
このため、スロットル開度とシフト切り替え用油圧式クラッチ61,62の接続力とがそれぞれの目標値通りに制御された場合、第2の動力伝達軸51の回転速度と第3の動力伝達軸59の回転速度とは、図14に示すようになる。
【0104】
なお、図14及び図15において、符号「51」で示された線が第2の動力伝達軸51の回転速度を示している。符号「59」で示された線が第3の動力伝達軸59の回転速度を示している。
【0105】
また、図14及び図15に示すグラフは、説明の便宜上、プロペラ41の負荷状態などが一定であると仮定した模式的なグラフである。実際にはプロペラ41の負荷状態などが随時変化するため、必ずしも図14や図15に示すようになるとは限らない。また、以下の説明においても、説明の便宜上、プロペラ41の負荷状態などがないものと仮定して説明する。
【0106】
具体的には、図14に示すように、アクセル開度が所定のアクセル開度A1以下のときは、第2の動力伝達軸51の回転速度は、所定の回転速度r2でほぼ一定となる。アクセル開度が所定のアクセル開度A1以上のときに、第2の動力伝達軸51の回転速度は、アクセル開度の増大に伴って高くなる。
【0107】
一方、アクセル開度がゼロであるときは、第3の動力伝達軸59は実質的に回転しない。第3の動力伝達軸59の回転速度は、アクセル開度がゼロから増大すると共に高くなる。アクセル開度が所定のアクセル開度A1となったときに、第2の動力伝達軸51の回転速度と第3の動力伝達軸59の回転速度とがほぼ等しくなる。アクセル開度が所定のアクセル開度A2となったときに、第2の動力伝達軸51の回転速度と第3の動力伝達軸59の回転速度とが実質的に等しくなる。
【0108】
すなわち、アクセル開度が所定のアクセル開度A2となったときに、シフト切り替え用油圧式クラッチ61,62が実質的に完全に接続される。アクセル開度が所定のアクセル開度A2となるまでは、シフト切り替え用油圧式クラッチ61,62は、所謂半クラッチ制御される。これによって、第3の動力伝達軸59の回転速度の大きさが第2の動力伝達軸51の回転速度の大きさよりも低くなるように調整される。
【0109】
本実施形態では、図11に示すように、ステップS31に続いてステップS32が行われる。ステップS32では、CPU86aによって、算出された目標スロットル開度にスロットル開度が調節される。
【0110】
次に、ステップS33において、CPU86aによって、プロペラ回転速度センサ90によって検出される実際のプロペラ回転速度に応じてシフト切り替え用油圧式クラッチ61,62の接続力が調節される。以下、ステップS33において行われるシフト切り替え用油圧式クラッチ61,62の接続力の調整制御の具体的な内容について、図18を主として参照しながら詳細に説明する。
【0111】
上述のように、CPU86aは、ステップS31において、図12におけるアクセル開度とプロペラ回転速度との関係を示すマップを用いてプロペラ回転速度目標値を求める。次に、CPU86aは、図18に示すように、プロペラ回転速度目標値と実際のプロペラ回転速度との偏差を求める。この偏差に制御ゲインをかけた値に基づいて、目標とするシフト切り替え用油圧式クラッチ61,62の接続力の調整量が求められる。具体的には、算出された(偏差)×(ゲイン(G))を、図19に示すシフト切り替え用油圧式クラッチ61,62の接続力の調節量と(偏差)×(ゲイン(G))との関係を示すマップに当てはめることによって、CPU86aは、シフト切り替え用油圧式クラッチ61,62の接続力の調整量を算出する。CPU86aは、算出されたシフト切り替え用油圧式クラッチ61,62の接続力の調整量と、ステップS31において算出されたシフト切り替え用油圧式クラッチ61,62の目標接続力とを加算することによって、シフト切り替え用油圧式クラッチ61,62の接続力を求める。そして、CPU86aは、求められたシフト切り替え用油圧式クラッチ61,62の接続力に基づいて、シフト接続用電磁バルブ73,74を調節する。
【0112】
ここで、求められたシフト切り替え用油圧式クラッチ61,62の接続力が0〜100%の間である場合は、CPU86aは、シフト切り替え用油圧式クラッチ61,62の接続力が求められた接続力となるようにシフト接続用電磁バルブ73,74を調節する。求められたシフト切り替え用油圧式クラッチ61,62の接続力が0%未満である場合は、CPU86aは、逆側のクラッチの接続力が増大するようにシフト接続用電磁バルブ73,74を調節する。また、求められたシフト切り替え用油圧式クラッチ61,62の接続力が100%を超える場合は、CPU86aは、シフト切り替え用油圧式クラッチ61または62の接続力が100%となるようにシフト接続用電磁バルブ73,74を調節する。
【0113】
なお、制御ゲインは、比例ゲイン、積分ゲインおよび微分ゲインの中から、油圧応答性や機械的慣性力などに応じて、選択される。制御ゲインとして、比例ゲイン、積分ゲインおよび微分ゲインの中から選ばれた2つ以上のゲインを組み合わせたものを使用してもよい。
【0114】
以下、図20に示すタイムチャートの一例を参照しつつ、具体的に説明する。
【0115】
図20に示す例では、時間t1において、シフトポジション切り替え機構36のシフトポジションがニュートラルにされ、次いで、時間t2において、第2のモードが開始されている。このため、ステップS3によって、時間t2以降は、アクセル開度に応じて、シフト切り替え用油圧式クラッチ61,62の接続状態及びエンジン回転速度が制御される。
【0116】
時間t2〜t3の期間は、目標プロペラ回転速度がゼロに近づく。時間t2〜t3の期間は、目標プロペラ回転速度と実際のプロペラ回転速度との偏差が大きい。このため、図18に示す演算によって求められる第1のシフト切り替え用油圧式クラッチ62の制御量が0%未満となる。よって、目標プロペラ回転速度がフォワード側であるにもかかわらず、第2のシフト切り替え用油圧式クラッチ61の接続力の増大が行われている。その結果、プロペラ回転速度が低下し、実際のプロペラ回転速度が目標プロペラ回転速度に近づいている。
【0117】
時間t3〜t4の期間では、目標プロペラ回転速度と実際のプロペラ回転速度との偏差が小さい。このため、図18に示す演算によって求められる第1のシフト切り替え用油圧式クラッチ62の制御量が0〜100%の範囲となる。従って、第2のシフト切り替え用油圧式クラッチ61の接続力が求められた制御量に従って増大されている。
【0118】
時間t4以降は、図18に示すフィードバック制御が平衡した状態となっている。時間t4以降は、第1のシフト切り替え用油圧式クラッチ62の接続力は、目標接続力よりも少し小さい値で保持されている。
【0119】
以上説明したように、本実施形態では、モードを切り替えることによって、コントロールレバー83の操作量に対するアクセル開度の大きさを切り替えることができる。従って、例えば、アクセル開度、プロペラ回転速度調整の利便性がより向上される。具体的には、例えば、コントロールレバー83の操作量に対するアクセル開度の大きさが比較的小さなモードに切り替えることによって、アクセル開度の微調整が容易となる。よって、推進力、推進速度、プロペラ回転速度の微調整が容易となる。例えば、離着岸時やトローリング時などにおいて、船舶1の推進力及び推進速度を微調整することが容易となる。また、コントロールレバー83の操作量に対するアクセル開度の大きさが比較的大きなモードに切り替えることによって、船舶1の推進力及び推進速度を迅速に調整することが可能となる。
【0120】
特に、本実施形態では、後述のように、第2の動力伝達軸51の回転速度に対する第3の動力伝達軸59の回転速度の比の微調整ができる第2のモードにおいて、コントロールレバー83の操作量に対するアクセル開度の大きさが小さく設定されている。このため、船舶1の推進力及び推進速度の微調整が特に容易である。
【0121】
また、シフト切り替え用油圧式クラッチ61,62が接続状態または切断状態のいずれかに保持される第1のモードにおいて、コントロールレバー83の操作量に対するアクセル開度の大きさが大きく設定されている。このため、船舶1の推進力及び推進速度のより迅速なコントロールが可能となっている。
【0122】
本実施形態では、第2のモードにおいて、シフト切り替え用油圧式クラッチ61,62の接続状態が制御される。これによって、第2の動力伝達軸51の回転速度に対する第3の動力伝達軸59の回転速度の比を微調整することができる。よって、第3の動力伝達軸59の回転速度をより細かに制御することができる。従って、推進力、推進速度の微調整を容易に行うことができる。特に、離着岸時やトローリング時などの低速領域または極低速領域において、推進力、推進速度の微調整を容易に行うことができる。
【0123】
なお、本明細書において、「低速領域」とは、例えば、10〜20km/h程度の速度領域をいう。「極低速領域」とは、例えば、0km/h〜10km/h程度の速度領域をいう。但し、これらの数値範囲は単なる例示である。低速領域と極低速領域の定義は、船舶用推進システムが搭載される船舶の種類によって異なる。
【0124】
本実施形態では、図14に示すように、第3の動力伝達軸59の回転速度が実質的にゼロから第2の動力伝達軸51の回転速度まで連続的に変化するようにシフト切り替え用油圧式クラッチ61,62の接続状態を制御可能である。このため、推進力、推進速度の微調整が特に容易である。
【0125】
例えば、シフト切り替え用油圧式クラッチ61,62がシフトポジションに合わせて切断状態または接続状態のいずれかに制御されていると、シフトポジションがフォワードまたはリバースにある場合は、図15に示すように、入力軸としての第2の動力伝達軸51の回転速度と出力軸としての第3の動力伝達軸59の回転速度とが実質的に同じに制御される。このため、図15に示すように、第3の動力伝達軸59の回転速度をエンジン30がアイドル回転状態にあるときの第2の動力伝達軸51の回転速度r2よりも低くすることが困難である。従って、プロペラ回転速度を所定の回転速度以下にすることが困難である。その結果、小さな推進力を発生させることが困難である。
【0126】
それに対して本実施形態では、ECU86によって、第2のモードにおいて第3の動力伝達軸59の回転速度の大きさが第2の動力伝達軸51の回転速度の大きさよりも低くなるようにシフト切り替え用油圧式クラッチ61,62の接続状態が制御される。このため、図14に示すように、第3の動力伝達軸59の回転速度をエンジン30がアイドル回転状態にあるときの第2の動力伝達軸51の回転速度r2よりも低くすることができる。従って、プロペラ回転速度を所定の回転速度以下にすることができる。その結果、より小さな推進力を発生させることが可能となる。よって、船舶1を低速で推進させることが容易となる。
【0127】
また、本実施形態では、上述のように、第3の動力伝達軸59の回転速度が実質的にゼロから第2の動力伝達軸51の回転速度まで連続的に変化するようにシフト切り替え用油圧式クラッチ61,62の接続状態を制御可能である。このため、特に小さな推進力を発生させることも可能である。従って、船舶1を極低速で推進させることも可能となる。
【0128】
なお、シフト切り替え用油圧式クラッチ61,62の接続状態の制御方法は、特に限定されない。例えば、本実施形態のように、シフト切り替え用油圧式クラッチ61,62の接続力を調節することで、シフト切り替え用油圧式クラッチ61,62の接続状態を制御してもよい。また、シフト切り替え用油圧式クラッチ61,62の接続時間を調節することで、シフト切り替え用油圧式クラッチ61,62の接続状態を制御してもよい。具体的には、シフト切り替え用油圧式クラッチ61,62が接続される時間とシフト切り替え用油圧式クラッチ61,62が接続されない時間との比率を変更することで、シフト切り替え用油圧式クラッチ61,62の接続状態を制御してもよい。言い換えれば、ある一定周期あたりに占めるシフト切り替え用油圧式クラッチ61,62の接続時間を変更することで、シフト切り替え用油圧式クラッチ61,62の接続状態を制御してもよい。
【0129】
なお、シフト切り替え用油圧式クラッチ61,62の接続力を調節する場合は、本実施形態のように、シフト切り替え用油圧式クラッチ61,62が多板式クラッチであることが好ましい。また、シフト切り替え用油圧式クラッチ61,62を油圧式のクラッチとして、油圧を徐変可能なバルブ72〜74を用いることがより好ましい。これによれば、シフト切り替え用油圧式クラッチ61,62の接続力を容易に調節することができる。
【0130】
一方、シフト切り替え用油圧式クラッチ61,62の接続時間を調節する場合は、シフト切り替え用油圧式クラッチ61,62は、ドッククラッチまたは多板式クラッチのいずれであってもよい。
【0131】
《第2の実施形態》
上記第1の実施形態では、感度切り替え部としてのモード切り替えスイッチ92がコントロールレバー83の操作量を出力し、制御装置91がその出力されたコントロールレバー83の操作量と、感度切り替え信号として出力されたモードとによってエンジン30のスロットル開度を制御する例について説明した。但し、本発明はこの構成に限定されない。
【0132】
例えば、モードに基づく感度切り替えがモード切り替えスイッチ92によって行われるようにしてもよい。具体的には、モード切り替えスイッチ92がコントロールレバー83の操作量と、選択されたモードとに基づいたアクセル開度を出力するようにしてもよい。より具体的には、モード切り替えスイッチ92は、コントロールレバー83の操作量を図9に示すマップに当てはめることによって算出したアクセル開度を出力するものであってもよい。
【0133】
この場合であっても、上記第1の実施形態と同様に、アクセル開度調整の利便性がより向上される。具体的には、例えば、アクセル開度、船舶1の推進力及び推進速度の微調整、アクセル開度、船舶1の推進力及び推進速度の迅速な調整が可能となる。
【0134】
《その他の変形例》
上記実施形態では、第1のモードと第2のモードとの間でモードが切り替えられることによって、コントロールレバーの操作量に対するアクセル開度の大きさと共に、シフト切り替え用油圧式クラッチ61,62の制御が変更される例について説明した。但し、コントロールレバーの操作量に対するアクセル開度の大きさの変更と、シフト切り替え用油圧式クラッチ61,62の制御の変更とは、別個に行われてもよい。具体的には、シフト切り替え用油圧式クラッチ61,62の制御を切り替えるスイッチと、コントロールレバーの操作量に対するアクセル開度の大きさを切り替えるスイッチとを別個に設けてもよい。また、コントロールレバーの操作量に対するアクセル開度の大きさを切り替えるスイッチのみを設けてもよい。
【0135】
上記実施形態では、第1のモードと第2のモードとを切り替えるモード切り替えスイッチ92を設ける例について説明した。但し、本発明においてモード切り替えスイッチ92は必須ではない。
【0136】
例えば、アクセル開度が所定の開度以下であるときに自動的に第2のモードとなり、アクセル開度が所定の開度より大きいときに自動的に第1のモードとなるようにECU86によって制御してもよい。
【0137】
上記実施形態では、コントロールレバー83の操作角度θに対するアクセル開度の大きさが異なる2つのモードが選択可能な例について説明した。但し、モードの種類は2種類に限定されない。例えば、コントロールレバー83の操作角度θに対するアクセル開度の大きさが異なる3つ以上のモードが選択可能であってもよい。
【0138】
具体的には、例えば、極低速モードと、低速モードと、通常モードとの3つのモードが選択可能であってもよい。極低速モードは、離着岸時などの極低速時に使用される。極低速モードでは、コントロールレバー83の操作角度θに対するアクセル開度の大きさが最も小さく設定される。低速モードは、トローリング時などの低速時に使用される。低速モードでは、コントロールレバー83の操作角度θに対するアクセル開度の大きさが比較的小さく設定される。通常モードは、コントロールレバー83の操作角度θに対するアクセル開度の大きさが低速モードや極低速モードと較べて大きく設定される。
【0139】
上記第1の実施形態では、第2のモードにおいて、シフト切り替え用油圧式クラッチ61,62の接続状態とエンジン回転速度との両方が制御される場合について説明した。但し、第2のモードは、エンジン回転速度が制御されずに、シフト切り替え用油圧式クラッチ61,62の接続状態が制御されるモードであってもよい。以下、本実施形態では、第2のモードにおいて、エンジン回転速度が制御されずに、シフト切り替え用油圧式クラッチ61,62の接続状態が制御される場合について説明する。
【0140】
なお、以下の説明において、上記第1の実施形態と実質的に同じ機能を有する部材については同じ符号を用い、詳細な説明を省略する。また、図1〜図9は、本実施形態においても、上記第1の実施形態と共通して参照する。
【0141】
本実施形態では、図16に示すように、ステップS1において第2のモードであると判断された場合は、ステップS4に進む。そして、ステップS4において、アクセル開度に応じてシフト切り替え用油圧式クラッチ61,62の接続状態が制御される。このため、図17に示すように、図11に示すステップS32は行われず、ステップS31に続いてステップS33が行われる。
【0142】
この場合においても、船舶1の推進力の微調整、小さな推進力の発生が可能となる。
【0143】
上記実施形態では、シフトポジション切り替え機構36がひとつの遊星歯車機構60と2つのクラッチ61,62とによって構成されている例について説明した。但し、本発明において、シフトポジション切り替え機構の構成はこれに限定されない。例えば、連動機構部分に配置された前進/後進切り替え機構と、前進/後進切り替え機構とエンジン30との間を断続するクラッチとによってシフトポジション切り替え機構を構成してもよい。
【0144】
上記実施形態では、変速比切り替え機構35を制御するためのマップと、シフトポジション切り替え機構36を制御するためのマップとを船外機20に搭載されたECU86内のメモリ86bに記憶させている。また、電磁バルブ72,73,74を制御するための制御信号を船外機20に搭載されたECU86内のCPU86aから出力させている。
【0145】
但し、本発明は、この構成に限定されない。例えば、船体10に搭載したコントローラー82に、記憶部としてのメモリと、演算部としてのCPUとを、メモリ86b及びCPU86aと共に、またはメモリ86b及びCPU86aに替えて設けてもよい。この場合、コントローラー82に設けられたメモリに変速比切り替え機構35を制御するためのマップと、シフトポジション切り替え機構36を制御するためのマップとを記憶させてもよい。また、コントローラー82に設けられたCPUから電磁バルブ72,73,74を制御するための制御信号を出力させてもよい。
【0146】
上記実施形態では、ECU86がエンジン30と電磁バルブ72,73,74との両方の制御を行う例について説明した。但し、本発明は、これに限定されない。例えば、エンジンを制御するECUと、電磁バルブを制御するECUとを別個に設けてもよい。
【0147】
上記実施形態では、コントローラー82が所謂「電子制御式コントローラー」である例について説明した。ここで、「電子制御式コントローラー」とは、コントロールレバー83の操作量を電気信号に変換すると共に、その電気信号をLAN80に出力するコントローラーをいう。
【0148】
但し、本発明において、コントローラー82は電子制御式コントローラーでなくてもよい。コントローラー82は、例えば所謂機械式コントローラーであってもよい。ここで、「機械式コントローラー」とは、コントロールレバーと、コントロールレバーに接続されたワイヤを備え、コントロールレバーの操作量及び操作方向をワイヤの操作量及び操作方向という物理量として船外機に伝達するコントローラーをいう。
【0149】
上記実施形態では、シフト機構34が変速比切り替え機構35を有する例について説明した。但し、シフト機構34は、変速比切り替え機構35を有さないものであってもよい。例えば、シフト機構34は、シフトポジション切り替え機構36のみを有するものであってもよい。
【0150】
なお、本明細書において、クラッチの接続力とは、クラッチの接続状態を表す値である。すなわち、例えば、「変速比切り替え用油圧式クラッチ53の接続力が100%である」とは、プレート群53bが完全な圧接状態となるように油圧式ピストン53aが駆動され、変速比切り替え用油圧式クラッチ53が完全に接続された状態を意味する。一方、例えば、「変速比切り替え用油圧式クラッチ53の接続力が0%である」とは、油圧式ピストン53aが非駆動状態となることによって、プレート群53bのプレート同士が離間して非圧接状態になり、変速比切り替え用油圧式クラッチ53が完全に切断された状態を意味する。また、例えば、「変速比切り替え用油圧式クラッチ53の接続力が80%である」とは、プレート群53bが圧接状態となるように変速比切り替え用油圧式クラッチ53が駆動され、変速比切り替え用油圧式クラッチ53が完全に接続された状態に対して、入力軸としての第1の動力伝達軸50から出力軸としての第2の動力伝達軸51へ伝達される駆動トルクまたは、第2の動力伝達軸51の回転速度が80%となる状態で接続された、所謂半クラッチ状態であることを意味する。
【図面の簡単な説明】
【0151】
【図1】第1の実施形態に係る船舶の船尾部分を側面視した際の部分断面図である。
【図2】第1の実施形態における推進力発生装置の構成を表す模式的構成図である。
【図3】第1の実施形態におけるシフト機構の模式的断面図である。
【図4】第1の実施形態におけるオイル回路図である。
【図5】船舶の制御ブロック図である。
【図6】第1〜第3の油圧式クラッチの接続状態と、シフト機構のシフトポジションとを表す表である。
【図7】シフト切り替え用油圧クラッチの接続力と、入力軸の回転速度に対する出力軸の回転速度の比との関係を表すグラフである。
【図8】コントロールレバーを表す概念図である。
【図9】コントロールレバーの操作角度とアクセル開度との関係を表すグラフである。図中、M1は、第1のモードにおけるコントロールレバーの操作角度とアクセル開度との関係を表す。図中、M2は、第2のモードにおけるコントロールレバーの操作角度とアクセル開度との関係を表す。
【図10】第1のモードと第2のモードとにおけるプロペラ回転速度の制御を表すフローチャートである。
【図11】第2のモードにおけるプロペラ回転速度の制御を表すフローチャートである。
【図12】アクセル開度とプロペラ回転速度との関係を規定したマップである。
【図13】アクセル開度と、スロットル開度及びシフト切り替え用油圧式クラッチの接続力との関係を規定したマップである。実線で示すグラフはスロットル開度を規定している。破線で示すグラフはシフト切り替え用油圧式クラッチの接続力を規定している。
【図14】スロットル開度とシフト切り替え用油圧式クラッチの接続力がそれぞれの目標値通りに制御された場合の、第2及び第3の動力伝達軸の回転速度とアクセル開度との関係を表すグラフである。
【図15】シフト切り替え用油圧式クラッチ61,62がシフトポジションに合わせて切断状態または接続状態に制御される場合のアクセル開度と、第2及び第3の動力伝達軸の回転速度との関係を表すグラフである。
【図16】変形例における第1のモードと第2のモードとにおけるプロペラ回転速度の制御を表すフローチャートである。
【図17】変形例における第2のモードにおけるプロペラ回転速度の制御を表すフローチャートである。
【図18】ステップS33において行われるクラッチの接続力の調整制御の具体例を表す制御ブロック図である。
【図19】クラッチの接続力の調整量を算出するためのマップである。
【図20】ステップS33において行われる制御を説明するためのタイムチャートの一例である。
【符号の説明】
【0152】
20 船外機(船舶用推進システム)
30 エンジン(動力源)
34 シフト機構
41 プロペラ
50 第1の動力伝達軸(シフト機構の入力軸)
51 第2の動力伝達軸(クラッチの入力軸)
59 第3の動力伝達軸(シフト機構の出力軸、クラッチの出力軸)
61 第1のシフト切り替え用油圧式クラッチ
62 第2のシフト切り替え用油圧式クラッチ
62a 油圧式シリンダ
62b プレート群
70 アクチュエータ
71 オイルポンプ(油圧ポンプ)
72 変速比切り替え用電磁バルブ(バルブ)
73 後進シフト接続用電磁バルブ(バルブ)
74 前進シフト接続用電磁バルブ(バルブ)
75 オイル経路
82 コントローラー(コントロール装置)
83 コントロールレバー
84 アクセル開度センサ(アクセル開度検出部)
86 ECU(電子コントロールユニット)
91 制御装置
92 モード切り替えスイッチ(感度切り替え部)
【特許請求の範囲】
【請求項1】
回転力を発生させる動力源と、
前記動力源の回転力により駆動されるプロペラと、
操船者の操作によってアクセル開度が入力されるコントロールレバーと、
前記コントロールレバーの操作量を検出し、前記コントロールレバーの操作量を出力するアクセル開度検出部と、
操船者の操作によって、前記コントロールレバーの操作量に対する前記アクセル開度の大きさが切り替えられ、前記入力されたコントロールレバーの操作量に対するアクセル開度の大きさである感度を感度切り替え信号として出力する感度切り替え部と、
前記コントロールレバーの操作量と前記感度切り替え信号とに基づいて前記動力源の出力を制御する制御装置と、
を備えた船舶用推進システム。
【請求項2】
回転力を発生させる動力源と、
前記動力源の回転力により駆動されるプロペラと、
操船者の操作によってアクセル開度が入力されるコントロールレバーと、
前記コントロールレバーの操作量を検出し、前記コントロールレバーの操作量に応じたアクセル開度を出力するアクセル開度検出部と、
操船者の操作によって、前記コントロールレバーの操作量に対する前記アクセル開度検出部から出力されるアクセル開度の大きさである感度を切り替える感度切り替え部と、
前記アクセル開度に基づいて前記動力源の出力を制御する制御装置と、
を備えた船舶用推進システム。
【請求項3】
請求項1または2に記載された船舶用推進システムにおいて、
前記動力源からの回転力が入力される入力軸と、前記プロペラ側に回転力を出力する出力軸と、前記入力軸と前記出力軸との間を断続するクラッチとを有し、フォワード、リバース、及び前記クラッチが切断されたニュートラルの間でシフトポジションを切り替えるシフトポジション切り替え機構と、
をさらに備え、
前記制御装置は、シフトポジションがフォワードまたはリバースである第1のモードにおいて、前記入力軸の回転速度の大きさと前記出力軸の回転速度の大きさとが実質的に同じになるように前記クラッチの接続状態を制御する一方、シフトポジションがフォワードまたはリバースである第2のモードにおいて、前記入力軸の回転速度よりも前記出力軸の回転速度が低くなるように前記クラッチの接続状態を制御する船舶用推進システム。
【請求項4】
請求項3に記載された船舶用推進システムにおいて、
前記制御装置は、前記第2のモードにおいて、前記出力軸の回転速度が実質的にゼロから前記入力軸の回転速度まで連続的に変化するように前記クラッチの接続状態を制御可能である船舶用推進システム。
【請求項5】
請求項4に記載された船舶用推進システムにおいて、
前記制御装置は、前記第2のモードにおいて、前記出力軸の回転速度を前記動力源がアイドル回転状態であるときの前記入力軸の回転速度よりも低くなるように前記クラッチの接続状態を制御する船舶用推進システム。
【請求項6】
請求項5に記載された船舶用推進システムにおいて、
前記第1のモードにおける前記コントロールレバーの操作量に対する前記動力源の出力の大きさと、前記第2のモードにおける前記コントロールレバーの操作量に対する前記動力源の出力の大きさとは相互に異なり、
前記感度切り替え部は、前記第1のモードと前記第2のモードとを切り替え可能である船舶用推進システム。
【請求項7】
請求項6に記載された船舶用推進システムにおいて、
前記第2のモードにおける前記コントロールレバーの操作量に対する前記動力源の出力の大きさは、前記第1のモードにおける前記コントロールレバーの操作量に対する前記動力源の出力の大きさよりも小さい船舶用推進システム。
【請求項8】
請求項3に記載された船舶用推進システムにおいて、
前記制御装置は、前記第2のモードにおいて、前記動力源の回転速度を略一定に保ちつつ、前記アクセル開度に基づいて前記クラッチの接続状態を変化させる船舶用推進システム。
【請求項9】
請求項3に記載された船舶用推進システムにおいて、
前記制御装置は、前記第1のモードにおいて、前記クラッチを接続させて、前記入力軸の回転速度と前記出力軸の回転速度とを実質的に同じに保ちつつ、前記アクセル開度に基づいて前記動力源の回転速度を変化させる船舶用推進システム。
【請求項10】
請求項3に記載された船舶用推進システムにおいて、
前記制御装置は、前記第2のモードにおいて、前記クラッチの接続力を制御することで前記出力軸の回転速度を前記入力軸の回転速度よりも低くする船舶用推進システム。
【請求項11】
請求項3に記載された船舶用推進システムにおいて、
前記制御装置は、前記第2のモードにおいて、前記クラッチを接続する時間と前記クラッチを接続しない時間との比率を制御することで前記出力軸の回転速度を前記入力軸の回転速度よりも低くする船舶用推進システム。
【請求項12】
請求項3に記載された船舶用推進システムにおいて、
前記クラッチは、多板式クラッチである船舶用推進システム。
【請求項13】
請求項3に記載された船舶用推進システムにおいて、
前記制御装置は、
前記クラッチの接続力を調節するアクチュエータと、
前記アクチュエータ及び前記動力源を制御する電子コントロールユニットと、
を有する船舶用推進システム。
【請求項14】
請求項13に記載された船舶用推進システムにおいて、
前記クラッチは、
入力軸と、
出力軸と、
前記入力軸と共に回転する第1のプレート、及び前記第1のプレートと対向すると共に、対向する方向に変位可能に配置され、前記出力軸と共に回転する第2のプレートを含むプレート群と、
前記プレート群を圧接させる油圧シリンダと、
を有し、
前記アクチュエータは、
前記油圧シリンダに油圧を付与する油圧ポンプと、
前記油圧ポンプと前記油圧シリンダとを接続するオイル通路と、
前記オイル通路の通路面積を徐変可能なバルブと、
を有する船舶用推進システム。
【請求項15】
請求項1または2に記載された船舶用推進システムにおいて、
前記感度は、定数である船舶用推進システム。
【請求項16】
請求項1または2に記載された船舶用推進システムにおいて、
前記動力源からの回転力が入力される入力軸と、前記プロペラ側に回転力を出力する出力軸と、前記入力軸と前記出力軸との間の接続状態を変化させるクラッチとを有し、フォワード、リバース、及び前記クラッチが切断されたニュートラルの間でシフトポジションを切り替えるシフトポジション切り替え機構と、
をさらに備え、
前記制御装置は、シフトポジションがフォワードまたはリバースである第1のモードにおいて、前記入力軸の回転速度の大きさと前記出力軸の回転速度の大きさとが実質的に同じになるように前記クラッチの接続状態を制御する一方、シフトポジションがフォワードまたはリバースである第2のモードにおいて、前記入力軸の回転速度よりも前記出力軸の回転速度が低くなるように前記クラッチの接続状態を制御する船舶用推進システム。
【請求項17】
回転力を発生させる動力源と、
前記動力源の回転力により駆動されるプロペラと、
前記動力源の出力をアクセル開度に基づいて制御する制御装置と、
を備えた舶用推進システムのコントロール装置であって、
操船者の操作によって前記アクセル開度が入力されるコントロールレバーと、
前記コントロールレバーの操作量を検出し、前記コントロールレバーの操作量に応じたアクセル開度を出力するアクセル開度検出部と、
操船者の操作によって、前記コントロールレバーの操作量に対する前記アクセル開度検出部から出力されるアクセル開度の大きさである感度を切り替える感度切り替え部と、
を備えた船舶用推進システムのコントロール装置。
【請求項1】
回転力を発生させる動力源と、
前記動力源の回転力により駆動されるプロペラと、
操船者の操作によってアクセル開度が入力されるコントロールレバーと、
前記コントロールレバーの操作量を検出し、前記コントロールレバーの操作量を出力するアクセル開度検出部と、
操船者の操作によって、前記コントロールレバーの操作量に対する前記アクセル開度の大きさが切り替えられ、前記入力されたコントロールレバーの操作量に対するアクセル開度の大きさである感度を感度切り替え信号として出力する感度切り替え部と、
前記コントロールレバーの操作量と前記感度切り替え信号とに基づいて前記動力源の出力を制御する制御装置と、
を備えた船舶用推進システム。
【請求項2】
回転力を発生させる動力源と、
前記動力源の回転力により駆動されるプロペラと、
操船者の操作によってアクセル開度が入力されるコントロールレバーと、
前記コントロールレバーの操作量を検出し、前記コントロールレバーの操作量に応じたアクセル開度を出力するアクセル開度検出部と、
操船者の操作によって、前記コントロールレバーの操作量に対する前記アクセル開度検出部から出力されるアクセル開度の大きさである感度を切り替える感度切り替え部と、
前記アクセル開度に基づいて前記動力源の出力を制御する制御装置と、
を備えた船舶用推進システム。
【請求項3】
請求項1または2に記載された船舶用推進システムにおいて、
前記動力源からの回転力が入力される入力軸と、前記プロペラ側に回転力を出力する出力軸と、前記入力軸と前記出力軸との間を断続するクラッチとを有し、フォワード、リバース、及び前記クラッチが切断されたニュートラルの間でシフトポジションを切り替えるシフトポジション切り替え機構と、
をさらに備え、
前記制御装置は、シフトポジションがフォワードまたはリバースである第1のモードにおいて、前記入力軸の回転速度の大きさと前記出力軸の回転速度の大きさとが実質的に同じになるように前記クラッチの接続状態を制御する一方、シフトポジションがフォワードまたはリバースである第2のモードにおいて、前記入力軸の回転速度よりも前記出力軸の回転速度が低くなるように前記クラッチの接続状態を制御する船舶用推進システム。
【請求項4】
請求項3に記載された船舶用推進システムにおいて、
前記制御装置は、前記第2のモードにおいて、前記出力軸の回転速度が実質的にゼロから前記入力軸の回転速度まで連続的に変化するように前記クラッチの接続状態を制御可能である船舶用推進システム。
【請求項5】
請求項4に記載された船舶用推進システムにおいて、
前記制御装置は、前記第2のモードにおいて、前記出力軸の回転速度を前記動力源がアイドル回転状態であるときの前記入力軸の回転速度よりも低くなるように前記クラッチの接続状態を制御する船舶用推進システム。
【請求項6】
請求項5に記載された船舶用推進システムにおいて、
前記第1のモードにおける前記コントロールレバーの操作量に対する前記動力源の出力の大きさと、前記第2のモードにおける前記コントロールレバーの操作量に対する前記動力源の出力の大きさとは相互に異なり、
前記感度切り替え部は、前記第1のモードと前記第2のモードとを切り替え可能である船舶用推進システム。
【請求項7】
請求項6に記載された船舶用推進システムにおいて、
前記第2のモードにおける前記コントロールレバーの操作量に対する前記動力源の出力の大きさは、前記第1のモードにおける前記コントロールレバーの操作量に対する前記動力源の出力の大きさよりも小さい船舶用推進システム。
【請求項8】
請求項3に記載された船舶用推進システムにおいて、
前記制御装置は、前記第2のモードにおいて、前記動力源の回転速度を略一定に保ちつつ、前記アクセル開度に基づいて前記クラッチの接続状態を変化させる船舶用推進システム。
【請求項9】
請求項3に記載された船舶用推進システムにおいて、
前記制御装置は、前記第1のモードにおいて、前記クラッチを接続させて、前記入力軸の回転速度と前記出力軸の回転速度とを実質的に同じに保ちつつ、前記アクセル開度に基づいて前記動力源の回転速度を変化させる船舶用推進システム。
【請求項10】
請求項3に記載された船舶用推進システムにおいて、
前記制御装置は、前記第2のモードにおいて、前記クラッチの接続力を制御することで前記出力軸の回転速度を前記入力軸の回転速度よりも低くする船舶用推進システム。
【請求項11】
請求項3に記載された船舶用推進システムにおいて、
前記制御装置は、前記第2のモードにおいて、前記クラッチを接続する時間と前記クラッチを接続しない時間との比率を制御することで前記出力軸の回転速度を前記入力軸の回転速度よりも低くする船舶用推進システム。
【請求項12】
請求項3に記載された船舶用推進システムにおいて、
前記クラッチは、多板式クラッチである船舶用推進システム。
【請求項13】
請求項3に記載された船舶用推進システムにおいて、
前記制御装置は、
前記クラッチの接続力を調節するアクチュエータと、
前記アクチュエータ及び前記動力源を制御する電子コントロールユニットと、
を有する船舶用推進システム。
【請求項14】
請求項13に記載された船舶用推進システムにおいて、
前記クラッチは、
入力軸と、
出力軸と、
前記入力軸と共に回転する第1のプレート、及び前記第1のプレートと対向すると共に、対向する方向に変位可能に配置され、前記出力軸と共に回転する第2のプレートを含むプレート群と、
前記プレート群を圧接させる油圧シリンダと、
を有し、
前記アクチュエータは、
前記油圧シリンダに油圧を付与する油圧ポンプと、
前記油圧ポンプと前記油圧シリンダとを接続するオイル通路と、
前記オイル通路の通路面積を徐変可能なバルブと、
を有する船舶用推進システム。
【請求項15】
請求項1または2に記載された船舶用推進システムにおいて、
前記感度は、定数である船舶用推進システム。
【請求項16】
請求項1または2に記載された船舶用推進システムにおいて、
前記動力源からの回転力が入力される入力軸と、前記プロペラ側に回転力を出力する出力軸と、前記入力軸と前記出力軸との間の接続状態を変化させるクラッチとを有し、フォワード、リバース、及び前記クラッチが切断されたニュートラルの間でシフトポジションを切り替えるシフトポジション切り替え機構と、
をさらに備え、
前記制御装置は、シフトポジションがフォワードまたはリバースである第1のモードにおいて、前記入力軸の回転速度の大きさと前記出力軸の回転速度の大きさとが実質的に同じになるように前記クラッチの接続状態を制御する一方、シフトポジションがフォワードまたはリバースである第2のモードにおいて、前記入力軸の回転速度よりも前記出力軸の回転速度が低くなるように前記クラッチの接続状態を制御する船舶用推進システム。
【請求項17】
回転力を発生させる動力源と、
前記動力源の回転力により駆動されるプロペラと、
前記動力源の出力をアクセル開度に基づいて制御する制御装置と、
を備えた舶用推進システムのコントロール装置であって、
操船者の操作によって前記アクセル開度が入力されるコントロールレバーと、
前記コントロールレバーの操作量を検出し、前記コントロールレバーの操作量に応じたアクセル開度を出力するアクセル開度検出部と、
操船者の操作によって、前記コントロールレバーの操作量に対する前記アクセル開度検出部から出力されるアクセル開度の大きさである感度を切り替える感度切り替え部と、
を備えた船舶用推進システムのコントロール装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【公開番号】特開2009−202779(P2009−202779A)
【公開日】平成21年9月10日(2009.9.10)
【国際特許分類】
【出願番号】特願2008−48345(P2008−48345)
【出願日】平成20年2月28日(2008.2.28)
【出願人】(000010076)ヤマハ発動機株式会社 (3,045)
【Fターム(参考)】
【公開日】平成21年9月10日(2009.9.10)
【国際特許分類】
【出願日】平成20年2月28日(2008.2.28)
【出願人】(000010076)ヤマハ発動機株式会社 (3,045)
【Fターム(参考)】
[ Back to top ]