
船舶用自動操舵装置
【課題】船舶の所望される変針量に対して参照針路を演算して出力する軌道演算部と、該参照針路からフィードフォワード舵角を演算して開ループ制御を行うフィードフォワード制御器と、を有する船舶用自動操舵装置において、最適な変針軌道計画を実現し、安定的、効率的な操船を可能とする。
【解決手段】軌道演算部は、参照針路を加速モード、等速モード及び減速モードに分けて出力し、加速モードにおいて、変針開始時点の旋回角加速度初期値C1aと旋回角速度C2aとの初期値がゼロでない場合にその値を取り込んで参照針路を演算する。初期値をゼロとした場合の変針量ΔψRと最大舵速度δ'Rとの関係に基づき、変針量ΔψRに応じて最大舵速度δ'Rを求める。そして、その舵速度δ'Rを用いて初期値がある場合の各モードの参照針路の演算を行なう。
【解決手段】軌道演算部は、参照針路を加速モード、等速モード及び減速モードに分けて出力し、加速モードにおいて、変針開始時点の旋回角加速度初期値C1aと旋回角速度C2aとの初期値がゼロでない場合にその値を取り込んで参照針路を演算する。初期値をゼロとした場合の変針量ΔψRと最大舵速度δ'Rとの関係に基づき、変針量ΔψRに応じて最大舵速度δ'Rを求める。そして、その舵速度δ'Rを用いて初期値がある場合の各モードの参照針路の演算を行なう。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、船舶用自動操舵装置に関し、その変針時の性能向上を行うことができる船舶用自動操舵装置に関する。
【背景技術】
【0002】
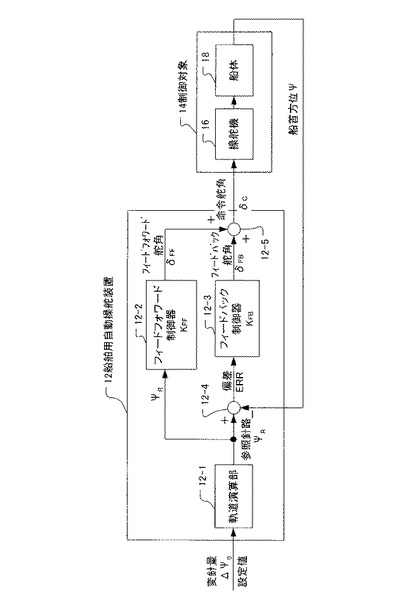
船舶用自動操舵装置は、設定針路にジャイロコンパスからの船首方位を追従させるために舵を制御する装置であり、変針時における性能向上を図ったものとして、本出願人による特許文献1に記載されたものが知られている。図1を用いて、その構成を簡単に説明する。図1は、船舶用自動操舵装置12、操舵機16及び船体18を含む全体のブロック図であり、操舵機16と船体18とが制御対象14となる船体プラントとなる。
【0003】
船舶用自動操舵装置12に入力信号として設定針路即ち所望される変針量、設定値及び
船首方位とが入力され、出力信号として命令舵角が出力される。
【0004】
そして、船舶用自動操舵装置は、設定針路が入力され参照針路を出力する軌道演算部と、フィードフォワード制御器と、フィードバック制御器と、第1及び第2の加算器と、を有している。
【0005】
特許文献1では、このフィードフォワード制御器の伝達関数は、制御対象である船体プラントの伝達関数P(s)の逆特性を有するように設定されており、具体的には、野本の1次モデル
【0006】
【数1】

を用いて
【0007】
【数2】
となるように設定される。ここで、KS、TSは船体パラメータで、それぞれ旋回力ゲインと時定数、sはラプラス演算子である。
【0008】
軌道演算部は、設定針路、設定値及び船首方位を用いて参照針路を演算し、出力するものである。設定値としては、変針時の旋回角速度、フィードフォワード舵角δFFの最大値及びフィードフォワード舵角の角速度δFF’の最大値がある。また、船首方位は、変針中に新たに別の変針を実施する場合等の変針開始時に旋回角速度と旋回角加速度がゼロでない場合に、これらの値を得るために使われる。
【0009】
そして、参照針路は次のような条件を満足するように構成される。
(1)加速モード、等速モード及び減速モードの3モードより構成され、各モード毎に時間管理される。参照針路ψR(t)は、各モード毎に時間tを変数とする関数となる。
(2)加速モードと減速モードでは、参照針路ψR(t)の時間tに関する2階微分は2次関数となる。
(3)等速モードでは、参照針路ψR(t)の時間tに関する1階微分は一定であり、2階微分はゼロである。
(4)加速モードでは、参照針路ψR(t)は船舶の旋回角加速度C1a及び旋回角速度C2aの値を初期値として取り込む。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開平8−207894号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
引用文献1では、制御対象の特性を考慮した変針軌道計画が実現可能となるという利点を有しているものの、次のような問題点が存在する。
・船体運動の変針中に新たに別の変針を実施する場合等の、変針開始時に旋回角速度と旋回角加速度がゼロでない場合に、その角加速度初期値C1aと角速度初期値C2aと最大旋回角速度rRとの関係が、C2a>rR、C1a<0またはC2a<rR、C1a>0のときに参照針路を適切に設定できない。
・角加速度初期値C1aと角速度初期値C2aがある場合に、その初期値を減衰させるために必要な変針量が設定される変針量より大きいと、変針時間が長くなるおそれがあり、適切に対応することができない。
・角加速度初期値C1aと角速度初期値C2aとを船首方位からの信号によって求めているが、船首方位からの信号はフィルタを通したとしても小さなノイズが重畳されているために、安定的な初期値を得ることが困難である。
【0012】
本発明は上記課題を解決して、より最適な変針軌道計画を実現し、よって、安定的、効率な操船を可能とする船舶用自動操舵装置を提供することをその目的とする。
【課題を解決するための手段】
【0013】
かかる目的を達成するために、本発明の請求項1に記載の発明は、船舶の所望される変針量に対して参照針路を演算して出力する軌道演算部と、該参照針路からフィードフォワード舵角を演算して開ループ制御を行うフィードフォワード制御器と、を有し、前記軌道演算部は、参照針路を加速モード、等速モード及び減速モードに分けて出力し、加速モードにおいて、変針開始時点の旋回角加速度の初期値C1aと旋回角速度の初期値C2aがゼロでない場合にその値を取り込んで参照針路を演算する船舶用自動操舵装置において、 前記軌道演算部は、前記初期値C1a、C2aをそれぞれゼロとして演算される参照針路に基づきフィードフォワード制御器から出力されるフィードフォワード舵角の舵速度が設定された最大舵速度を超えないように各モードを決めたときの加速モードの終端時及び等速モード時における旋回角速度rRを演算し、C2a>rRでC1a<0を満足する場合、またはC2a<rRでC1a>0を満足する場合には、加速モードにおける最大舵速度発生時点が各場合で常に同じになるように旋回角速度rRを修正し、該修正した旋回角速度rRを満足し且つ演算される参照針路に基づきフィードフォワード制御器から出力されるフィードフォワード舵角の舵速度が前記最大舵速度を超えないように各モードの参照針路を演算し、上記場合以外の場合には、修正しない旋回角速度rRを満足し且つ演算される参照針路に基づきフィードフォワード制御器から出力されるフィードフォワード舵角の舵速度が前記最大舵速度を超えないように各モードの参照針路を演算することを特徴とする。
【0014】
請求項2に記載の発明は、請求項1記載の前記軌道演算部の旋回角速度rRの演算を、等速モード及び減速モードのそれぞれの時間である等速時間及び減速時間の比を一定とした条件で行い、その結果が指定旋回角速度以上の場合には指定旋回角速度とし、指定旋回角速度以下の場合にその演算結果の角速度とすることを特徴とする。
【0015】
請求項3に記載の発明は、船舶の所望される変針量に対して参照針路を演算して出力する軌道演算部と、該参照針路からフィードフォワード舵角を演算して開ループ制御を行うフィードフォワード制御器と、を有し、前記軌道演算部は、参照針路を加速モード、等速モード及び減速モードに分けて出力し、加速モードにおいて、変針開始時点の旋回角加速度の初期値C1aと旋回角速度の初期値C2aとがゼロでない場合にその値を取り込んで参照針路を演算する船舶用自動操舵装置において、
前記軌道演算部は、前記初期値C1a、C2aをそれぞれゼロとして加速モードの終端時及び等速モード時における旋回角速度rRを求め、その際に、旋回角速度rRが指定旋回角速度r0に等しいと仮定したときに、演算される参照針路に基づきフィードフォワード制御器から出力されるフィードフォワード舵角が許容舵角以下の条件を満足するときに、旋回角速度rRを指定旋回角速度r0に決定し、該条件を満足しないときに、フィードフォワード舵角と許容舵角との偏差を最も小さくする角速度を旋回角速度rRに決定し、決定された旋回角速度rRとしたときのフィードフォワード制御器から出力されるフィードフォワード舵角の最大舵速度を求め、
C2a>rRでC1a<0を満足する場合、またはC2a<rRでC1a>0を満足する場合には、加速モードにおける最大舵速度発生時点が各場合で常に同じになるように旋回角速度rRを修正し、該修正した旋回角速度rRを満足し且つ演算される参照針路に基づきフィードフォワード制御器から出力されるフィードフォワード舵角の舵速度が前記最大舵速度を超えないように各モードの参照針路を演算し、上記場合以外の場合には、修正しない旋回角速度rRを満足し且つ演算される参照針路に基づきフィードフォワード制御器から出力されるフィードフォワード舵角の舵速度が前記最大舵速度を超えないように各モードの参照針路を演算することを特徴とする。
請求項4に記載の発明は、船舶の所望される変針量に対して参照針路を演算して出力する軌道演算部と、該参照針路からフィードフォワード舵角を演算して開ループ制御を行うフィードフォワード制御器と、を有し、前記軌道演算部は、参照針路を加速モード、等速モード及び減速モードに分けて出力し、加速モードにおいて、変針開始時点の旋回角加速度の初期値C1aと旋回角速度の初期値C2aがゼロでない場合にその値を取り込んで参照針路を演算する船舶用自動操舵装置において、
前記軌道演算部は、前記加速モードで前記初期値C1a、C2aを減衰させるために必要な方位変化量が所望される変針量よりも大きい場合に、加速モードを、初期値を減衰させる減衰モードと、前記等速モードの旋回角速度rRに収束させる通常モードとに分けて、それぞれのモードの参照針路を演算することを特徴とする。
【0016】
請求項5に記載の発明は、請求項1ないし4のいずれか1項に記載の旋回角加速度の初期値C1aと旋回角速度の初期値C2aが、変針開始時に変針中であったときの前回の変針に対して前記軌道演算部で演算を行った参照針路の2階微分と1階微分との変針開始時の値から求められることを特徴とする。
【発明の効果】
【0017】
請求項1及び3記載の発明によれば、C2a>rRでC1a<0を満足する場合、またはC2a<rRでC1a>0を満足する場合には、C2aとrRとの差異が大きい場合とその差異が小さい場合とで、舵速度が最大になる時点が異なるという不具合を発生するので、そのような不具合を回避するために、常に舵速度が最大になる時点を一定になるようにし、その時点での舵速度が最大舵速度を超えないようにすることで、安定的、効率的、安全な操船を行なうことができる。
【0018】
請求項2記載の発明によれば、等速時間の比率を一定とすることで、妥当な変針時間で省エネルギーを図ることができる。等速時間の比率を一定にしない場合には、大きい旋回角速度で変針時間を短くすることも可能になるが、省エネルギーの観点から好ましくない。本発明によれば、等速時間の比率を一定とすることで、等速時間のない場合に比べて省エネルギーを図ることができる。
【0019】
請求項4記載の発明によれば、所望される変針量が小さいと、初期値を減衰するために必要な方位変化量の方が大きくなる場合があり、かかる場合でも変針量が小さいものとして参照針路の演算を行なうと、変針時間が大きくなりすぎる不具合が発生するおそれがあるが、加速モードを減衰モードと通常モードとに分けてそれぞれのモードで適切にパラメータを設定することで、適切な参照針路を演算することができる。
【0020】
請求項5記載の発明によれば、変針中の新たな変針であれば、前回の変針のために演算した参照針路を用いて、新たな変針の開始時の初期値を得ることができる。そのため、ノイズの影響を受けない初期値を得ることができる。
【図面の簡単な説明】
【0021】
【図1】本発明の船舶用自動操舵装置と制御対象との全体のブロック図である。
【図2】参照針路とフィードフォワード舵角の時間変化(但し安定船の場合)を示すグラフである。
【図3】各モードにおける参照針路の2階微分と、1階微分の時間変化を示すグラフである。
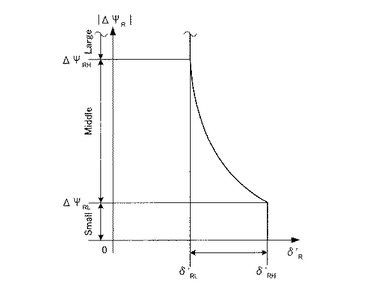
【図4】舵速度と変針量の関係を表すグラフである。
【図5】加速モードの参照針路の2階部分特性を表すグラフである(但し、C2a<rRでC1a>0の場合)。
【図6】野本の1次モデルに準拠した参照針路及び参照針路の1階微分の変針応答の時間変化を表すグラフである。
【図7】(a)は野本の1次モデルのブロック図、(b)は野本の2次モデルのブロック図である。
【図8】本発明で採用する船体モデルのブロック図である。
【図9】軌道演算部で行う処理を表すフローチャートである。
【図10】軌道演算部で行う参照針路の計算処理を表すフローチャートである。
【図11】軌道演算部で行う減衰モードの計算処理を表すフローチャートである。
【図12】本発明のシミュレーション結果であり、不安定船の大角度変針時を表す。
【図13】本発明のシミュレーション結果であり、(A)は安定船、(B)は不安定船のそれぞれの小角度変針時を表す。
【図14】本発明の等減速比を可変とした変形例による軌道演算部のブロック図である。
【図15】等減速比に対する舵速度δR’=dδ/dt、舵角δRと変針時間Ttの特性を表すグラフである。
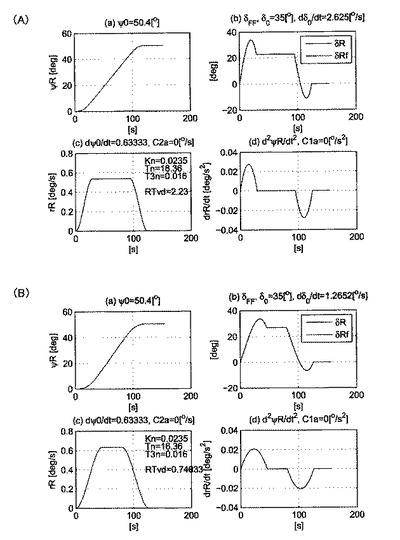
【図16】(A)は、本発明の等減速比を固定としたときのシミュレーション結果であり、(B)は本発明の等減速比を可変としたときのシミュレーション結果である。
【図17】船体のプロペラと舵との関係を表す模式図である。
【図18】推進力が変化したときの船首方位と方位比との関係を表すグラフである。
【図19】推進力が変化したときの伴流速度と船速との関係を示すグラフである。
【図20】本発明の増減速時のロバスト性向上を行った変形例の主要部分のブロック図である。
【発明を実施するための形態】
【0022】
以下、図面を参照しながら本発明の実施形態を説明する。
図1は、本発明の船舶用自動操舵装置12と、操舵機16及び船体18とからなる制御対象14とを含む全体のブロック図を示している。本発明の船舶用自動操舵装置12は、特許文献1と同様に、軌道演算部12−1と、フィードフォワード制御器12−2と、フィードバック制御器12−3と、第1及び第2の加算器12−4、12−5とを有している。
【0023】
軌道演算部12−1は、所望される変針量Δψ0及び設定値を用いて変針条件を満足する参照針路の時間関数を演算し、順次その参照針路ψRを時間の経過と共に、出力するものである。
【0024】
フィードフォワード制御器12−2は、参照針路からフィードフォワード舵角δFFを演算するものである。フィードフォワード制御器12−2は、自動操舵系において開ループ系を構成しており、この開ループ系は船首方位を直ちに参照針路に一致させるように作動する。
【0025】
フィードバック制御器12−3は、自動操舵系において閉ループ系を構成しており、船首方位と参照針路との偏差に対してフィードバック舵角δFBを演算するものである。変針系は、基本的には軌道演算部12−1からの参照針路と、フィードフォワード制御器12−2によるフィードフォワード制御の作動により、船首方位を参照針路に遅れなく追従させるものであり、このときに、参照針路と船首方位との間に偏差誤差ERRが生じた場合に、閉ループ系が偏差誤差ERRを減らすように動作する。しかしながら、この偏差誤差ERRはわずかであるため、本発明では、この閉ループ系については特許文献1と同様の構成とする。
【0026】
以下、軌道演算部12−1における参照針路ψR算出の基本的考え方について説明する。
【0027】
1.基本設計
軌道演算部12−1の出力する参照針路ψRは、変針条件を満足する時間関数である必要がある。変針条件としては、
針路条件:所望される変針量と、旋回角速度との針路条件
制限条件:操舵機16の特性を考慮したフィードフォワード舵角と舵速度との制限条件
初期値条件:変針直前の船体運動に起因した方位の角加速度と角速度との初期値条件が挙げられる。
【0028】
参照針路の変数と、変針条件の設定値との関係を表1に示す。
【0029】
【表1】
表1において、所望される変針量Δψ0は、変針直前の針路と設定針路との変化量として与えられるものとする。角速度rRは、参照針路ψRの1階微分値を、舵角δFFはフィードフォワード舵角を、舵速度δ'FFは、舵角δFFの1階微分値をそれぞれ示す。r0は指定旋回角速度、δ0は許容舵角、δ0’は許容舵速度である。参照針路ψRは、変針量ΔψRがΔψ0に一致するように、そして、他の変数rR、δFF、δ'FFの絶対値の最大値は、各々、指定旋回角速度、許容舵角、許容舵速度以下になるようにする。
【0030】
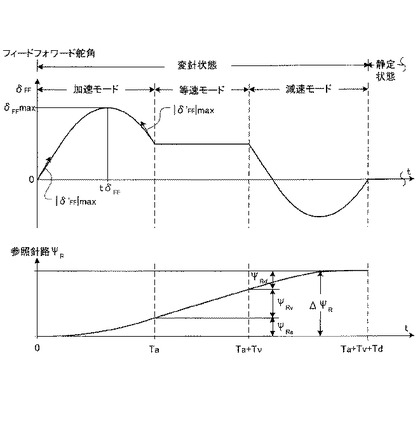
図2は、参照針路ψRとフィードフォワード舵角δFFの時間変化(但し安定船の場合)を示す。簡略化のため、変針の開始時間はゼロとし、船体運動の初期値はゼロとする。参照針路ψRは、特許文献1と同様に、加速モード、等速モード、減速モードの3モードより構成する。tは時間、Ta、Tv、Tdは、それぞれ加速時間、等速時間、減速時間を表す。以下、添字(・)a、(・)v、(・)dはそれぞれ加速、等速、減速モードを意味する。変針系は3つのモードに加えて減速モードの後に静定モードを持つことができるが、静定モードでは変針量が一定であるために説明を省略する。
【0031】
参照針路は、野本の1次モデルを用いると、2階微分可能な時間関数の条件を持つ。参照針路の2階微分値はモード間の連続性を保証するためモードの終端と次のモードの開始とでゼロになる必要がある。この要件を満たす最小次元の関数は2次関数であるから、2階微分の参照針路は2次関数を用いる。
【0032】
1.2 参照針路の時間関数
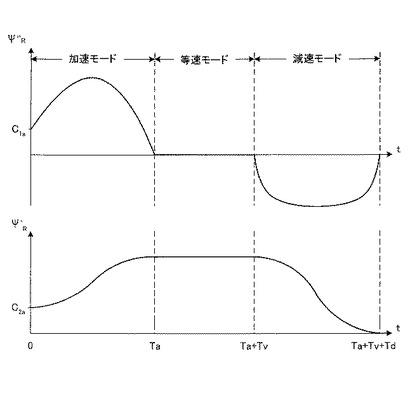
以下、各モードにおける参照針路について説明する(図3)。
1.2.1 加速モード
参照針路の2階微分が2次関数となり、初期値に角加速度C1aと角速度C2aを持つ。加速モードは、加速モード終了時に角加速度をゼロにする。
【0033】
加速モードの参照針路の2階微分、1階微分、参照針路は、以下のように表される。
【0034】
【数4】
【0035】
【数5】
【0036】
【数6】
【0037】
ここで、ψRaは加速モードの参照針路を、βaは加速定数をそれぞれ表す。時間範囲は、[0≦t≦Ta]である。時間Taで角加速度はゼロとなるので、ψ"Ra(Ta)=0より
【0038】
【数7】
となる。
【0039】
角加速度と角速度の初期値であるC1aとC2aは、t=0のときの角加速度、角速度の値
【0040】
【数8】
【0041】
1.2.2 等速モード
加速モードに続く等速モードでは参照針路の角速度は一定であり、角加速度はゼロである。従って、等速モードにおける参照針路の2階微分、1階微分、参照針路は、以下のように表される。
【0042】
【数9】
【0043】
【数10】
【0044】
【数11】
【0045】
ここで、ψRvは等速モードの参照針路を、rRは角速度をそれぞれ表す。時間範囲は、[Ta≦t≦Ta+Tv]である。C3Vは初期値である。等速モードと加速モードとの連続性の関係ψ’Rv(Ta)=ψ'Ra(Ta)とψRv(Ta)=ψRa(Ta)とから、
【0046】
【数12】
【0047】
【数13】
を得る。
【0048】
1.2.3 減速モード
参照針路はモードの終了時(終端時)にて変針量に一致し、その角速度と角加速度はモードの終了時点にてゼロになるように減衰される。したがって、減速モードの参照針路の2階微分、1階微分、参照針路は、以下のように表される。
【0049】
【数14】
【0050】
【数15】
【0051】
【数16】
【0052】
ここで、ψRdは減速モードの参照針路を、βdは減速定数をそれぞれ表す。時間範囲は、[Ta+Tv≦t≦Ta+Tv+Td]である。C2d、C3dは初期値である。減速モードと等速モードとの連続性の関係ψ'Rd(Ta+Tv)=ψ'Rv(Ta+Tv)とψRd(Ta+Tv)=ψRv(Ta+Tv)とから、
【0053】
【数17】
【0054】
【数18】
を得る。さらに、終端時間t=Ta+Tv+Tdで角速度ψ'Rv(t)をゼロにするために、
【0055】
【数19】
を得る。
【0056】
1.3 舵角と舵速度との最大値
フィードフォワード制御器12−2では、参照針路ψRからフィードフォワード舵角δFFを出力する。舵角δFFは、参照針路ψRを入力した船体モデルPの逆数とする。ここで、船体モデルPは、(1式)を使用することとすると、フィードフォワード舵角δFFは次から求まる。
【0057】
【数20】
【0058】
ここで、KsnとTsnは船体モデルのノミナル値で旋回力ゲイン、時定数を表す。Ksn>0、Tsn>0は安定船、、Ksn<0、Tsn<0は不安定船と定める。舵角δFFは参照針路の2階微分が2次関数であるから加速と減速とのモードで極値を持つ。舵角δFFと舵速度δ'FFとは、加速と減速の各モードの参照針路の(5式)及び(15式)を(19式)に代入すると、
【0059】
【数21】
【0060】
【数22】
になる。ここで、a3、a2、a1、a0はそれぞれ加速モード(添字(・)a)と減速モード(添字(・)d)に対して、
【0061】
【数23】
【0062】
【数24】
になる。尚、時間tは、加速モードで[0≦t≦Ta]、減速モードで[0≦t≦Td]とする。
【0063】
1.3.1 最大舵角
舵角の最大値または最小値は舵速度をゼロにする極値で生じるから(21式)よりその時間は、
【0064】
【数25】
で与えられる。ここで、分子の±の極性は+が安定船に、−が不安定船に対応する。舵角の最大値または最小値は時間tδFFを(20式)に代入することで求まる。最大舵角δR(以降、これを舵角と呼ぶ)は舵角δFFの絶対値の最大値
【0065】
【数26】
で定める。
【0066】
1.3.2 最大舵速度
舵速度の導関数は1次関数となり、図2に示したように、舵速度の最大値または最小値は加速と減速とのモードのそれぞれの開始または終端の時間で生じる。舵速度は、加速モードで初期値C1aのため開始と終端とで異なり、減速モードでは開始と終端とで同一となる。舵速度の最大値と最小値は(21式)〜(23式)から
【0067】
【数27】
【0068】
【数28】
になる。最大舵速度(以降これを舵速度と呼ぶ)δ'Rは舵速度δ'FFの絶対値の最大値
【0069】
【数29】
で定める。
【0070】
2.初期値をゼロとした最適設計
以上の関係式に基づき、変針条件を満足する参照針路を求める。そのために、まずは船体運動の初期値である角加速度C1aと角速度C2aはゼロとして設計パラメータを定めて諸変数の関係式を求める。簡単化のため変針量Δψ0は正とする。これにより加速と減速とのモードで時間Ta=Td、定数−βa=βd、変針量Δψa=Δψdになる。
【0071】
従って、加速時間Ta、加速定数βa及び角速度rR(=Taβa/6)を決定すれば参照針路を求めることができる。これらを求めるための設計パラメータとして、舵速度と、等速時間Tvと減速時間Tdとの比率である等減速比とする。等減速比は評価関数を導入して固定値とする。さらに、初期値をゼロとした場合の最大舵速度と変針量との関係を求め、該最大舵速度を変針量に応じた変数とする。
【0072】
2.1 参照針路の関係式
等速時間Tvと減速時間Tdとの比率を等減速比Rvdとする。即ち、
【0073】
【数30】
とする。尚ここで、減速時間Tdを用いている理由は、減速モードが初期値C1a、C2aに無関係であるからである。加速時間Taと加速定数βaと、舵速度δ'Rとの関係は、(26式)を用いて、
【0074】
【数31】
となる。ここで、CR≡δR’Ksn/Tsnを舵定数と呼ぶ。変針量ΔψRと変針時間Ttとは、(5式)、(11式)等から
【0075】
【数32】
【0076】
【数33】
になる。
【0077】
2.2 舵角の関係式
舵角は(19式)で示され、参照針路の1階微分と2階微分の和であるから、舵角の極値は2階微分の極値を1階微分の影響分だけずらした位置にある。
【0078】
加速モードの終端時間または減速モードの開始時間で参照針路の2階微分はゼロになるから、舵角の成分はその1階微分値、即ち角速度rR(条件ΔψR>0よりrR>0)になる。即ち、安定船では、
【0079】
【数34】
となり、不安定船では、
【0080】
【数35】
【0081】
となる。舵角の極性は安定船(Ksn>0)で正に、不安定船(Ksn<0)で負になる。よって、舵角の絶対値の最大値は1階微分値の影響により安定船では角速度成分を加算する加速モードで最大舵角として生じ、不安定船では角速度成分を減算する減速モードで最小舵角として生じる。以下、安定船と不安定船のそれぞれの舵角の最大値を求める。
【0082】
2.2.1 安定船の場合
極値をとる時間を(24式)より求める。Tsn>TaとしてTaylor展開の2次までを用いると、
【0083】
【数36】
【0084】
【数37】
になるから、極値の時間は、
【0085】
【数38】
になる。上記式の括弧内の第1項は参照針路の2階微分の極値時間に相当し、第2項は参照針路の1階微分の極値時間に相当する。よって、舵角の最大値は(37式)を(20式)に代入して、
【0086】
【数39】
になる。ここで、Tsn>Taの関係により2乗項と4乗項とを省く。こうして、舵角の最大値と加速時間Ta、加速定数βaとの関係を(38式)で示すような簡単な式で表すことができるようになる。
【0087】
2.2.2 不安定船の場合
減速モードで最小舵角を生じるのを除き、安定船の場合と同様で、極値の時間は
【0088】
【数40】
となる。舵角の最小値は、
【0089】
【数41】
になる。
【0090】
2.2.3 最大舵角のまとめ
(38式)と(40式)とをまとめると、最大舵角は
【0091】
【数42】
になる。安定船と不安定船の船体パラメータの絶対値が同じであれば、最大舵角は同じになり、参照針路の1階微分はTa/TsnまたはTd/Tsnで影響する、という特性が得られる。
【0092】
2.3 等減速比の設計
設計パラメータの等減速比は、評価関数を用いて決定する。まず、(31式)等から変針量ΔψRより等速時間Tv=6ΔψR/(βaTa)−Taを得るので、変針時間Ttは、
【0093】
【数43】
になる。ここで、Td=Ta、βa=−βdの条件を用いている。
【0094】
変針時間Ttを最小にする加速時間Taを求めると、
【0095】
【数44】
を得る。このとき、等速時間Tvは0となる。舵速度が一定の条件下で加速時間が最大になると角速度rRが最大になるので、変針時間を短くすれば角速度rRを大きくすることになる。変針動作の運動エネルギーは角速度の2乗に比例すると想定すると、単に変針時間を短くすることにのみ着目することは省エネルギーの観点から得策ではない。よって、変針時間を許容範囲内に設定して角速度を低くするために、変針時間と角速度とを用いた評価関数を導入し、それを最小にする等減速比を求めることにする。
【0096】
(31式)及び(38式)からβaを消去してTaの2次方程式をつくり、その解を求めると、
【0097】
【数45】
を得る。但し、
【0098】
【数46】
を仮定した。
【0099】
同様にβaを求め、変針時間Ttと角速度rRとを求めると、
【0100】
【数47】
【0101】
【数48】
になる。(46式)及び(47式)において等減速比以外の変数は設定値であるから、変針時間Ttと角速度rRは等減速比Rvdの関数となる。
【0102】
さらに、(46式)と(47式)から、等速時間をゼロ(Rvd=0)とした変針時間とその角速度とに対する等速時間比と角速度比とを以下で定義して評価量とする。評価量は(46式)と(47式)から係数が取り除かれた形となる。
【0103】
【数49】
【0104】
【数50】
【0105】
評価関数Jは、各評価量の2乗和とすると、
【0106】
【数51】
になり、この評価関数Jを最小にする等減速比Rvdの値を求める。ここで、λは正の重みを示す。評価関数JをRvdで微分しそれをゼロとおくと、
【0107】
【数52】
になる。
【0108】
様々な重みλに対して、(51式)を満足する等減速比Rvd(>0)とそのときの評価関数Jの特性を調べると、表2のようになる。
【0109】
【表2】
重みλが増加すれば評価関数は増加するが、変針時間の増加に対して、運動エネルギーの抑制効果が十分に期待できる範囲としては、2≦λ≦3の範囲、より好ましくは、λ=2.36とするとよいことが分かる。即ち、2≦Rvd≦2.61、より好ましくは、Rvd=2.23とするとよく、この等減速比Rvdを基本的に固定に設定する。
【0110】
2.4 舵速度の決定
次に、舵速度を決定する。舵速度δ'Rは、(30式)を変形すると
【0111】
【数53】
となる。(52式)を(38式)、(40式)に代入すると、βaの2次方程式ができ、この解を求めると、
【0112】
【数54】
【0113】
【数55】
として求まる。定数βaが求まると、定数Taも(52式)から求めることができる。
【0114】
安定船と不安定船の定数の差異はβaとβdの計算だけなので、以下安定船を想定する。不安定船のときは便宜的にβa=βdとすればよい。(30式)と(31式)とから
【0115】
【数56】
となる。
【0116】
(53式)、(54式)のβa、βd、またはTaを(55式)に代入して消去すると、変針量ΔψRと舵角δR及び舵速度δ'Rとの関係式が得られる。即ち、
【0117】
【数57】
となる。
【0118】
変針時間Ttを最短とする舵角δRの条件は、(46式)よりその上限である許容値を用いることである。
【0119】
ΔψRの範囲は、舵速度δ'Rの可変範囲で設定することができるので、δ'Rの範囲を例えば、
【0120】
【数58】
と定める。舵速度δ'Rと変針量ΔψRとの関係を図4に示す。
【0121】
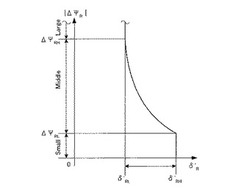
変針量ΔψRLはδ'Rの上限値δ'RHを用いた値で、変針量ΔψRHはδ'Rの下限値δ'RLを用いた値である。変針量|ΔψR|は、ΔψRL、ΔψRHにより3つの変針領域Small、Middle、Largeに分けられる。Middleは舵速度が変化する領域で、SmallとLargeは、舵速度がそれぞれ上限値δ'RHと下限値δ'RLとで一定の領域とする。
【0122】
変針量ΔψRL、ΔψRHは、(56式)等を用いて、δ'R=δ'RHのときのΔψをΔψRL、δ'R=δ'RLのときのΔψをΔψRHとして求めることができる。即ち、
【0123】
【数59】
になる。
【0124】
また、Middleの舵速度は、(53式)または(54式)を(56式)に代入してδ'R1/3の二次方程式を解くと、
【0125】
【数60】
を得る。ここで−が安定船の場合に+が不安定船に対応し、
【0126】
【数61】
であり、変針量ΔψRから対応する舵速度δ'Rを求めることができる。
【0127】
この結果、変針量の該当する変針領域は決定され、その領域から使用する最大舵速度δ'Rを決定する。
【0128】
2.5 指定旋回角速度
角速度rRは、(11式)または(31式)より、Taとβaを消去すると、
【0129】
【数62】
で求まる。
【0130】
この求められた角速度rRを用いて、最大舵角δRを(41)式を用いて求め、最大舵角δRと許容舵角δ0(表1参照)とを比較し、最大舵角δRが許容舵角δ0よりも大きい場合には、許容舵角δR=δ0を満足するようなrRを求め、さらに求めたrRと指定旋回角速度r0(表1参照)との大小関係を調べる。そして、求められた角速度rRが指定旋回角速度r0以上の場合に、rR=sign(ψR)r0としてこれを基準角速度とする。角速度r0以下の場合にはrRをそのまま基準角速度とするとする。前者の場合、角速度が変わるために、等減速比Rvd=2.23の条件を満足しない。そのため、等速時間を調節することで変針条件を満足させる。等速モードの変針量ΔψRvと等速時間Tvは
【0131】
【数63】
【0132】
【数64】
になる。
【0133】
3.初期値を考慮した設計
次に、船体運動の初期値C1aとC2aを考慮した場合について説明する。初期値は加速モードにのみ組み込まれる。1回の加速モードの終端で角加速度の初期値C1aはゼロになるが、角速度の初期値C2aは参照針路の基準角速度rRに収束できない場合がある。1回の加速モードで対応できる初期値C2aの大きさは舵角制限により限定されるからである。そこで、加速モードを複数回組み合わせることによって、初期値の大きさの影響を排除する。
【0134】
初期値をゼロにして求めた基準角速度rRを用い、加速モードの終端で角速度がrRになるように、且つ、舵速度がC1a、C2aをゼロとして変針量から決定した舵速度δ'Rを超えることのないように加速時間Taと加速定数βaを設定する。しかしながら、初期値C2aとrRの大小関係及び初期値C1aの正負関係の組み合わせによっては、上記基準角速度rRを用いることが適当でない場合が生じる。この場合に、基準角速度rRを修正する。
【0135】
3.1 初期値の組み込み
まず、舵角制限を無視して初期値を含んだ加速モードの定数を求めることにする。舵速度は初期値C1aにより開始または終端において異なる。両者の絶対値で大きい方を舵速度δ'Rに設定する。
【0136】
加速時間Taと加速定数βaとを(26式)及び(30式)の舵速度を用いて関係づけると、
【0137】
【数65】
を得る。ここで、CRaは加速モードの舵定数を、flgaは極性定数をそれぞれ示し、t=0、t=Taは最大舵速度の発生時刻でそれぞれ開始と終端とを示す。
【0138】
初期値を含んだ加速モードの関係式は、(11式)の左辺の角速度rRに初期値をゼロにして求めた基準角速度を置けば得られる。(64式)のβaを(11式)に代入するとTaに関する2次方程式
【0139】
【数66】
を得る。CRa≠0から加速時間は、
【0140】
【数67】
になり、βaは(64式)から求まる。
【0141】
3.1.1 最大舵速度の発生時刻の決定
初期値に対応して最大舵速度の発生時刻が決まれば、Taは(66式)から、βaは(64式)から求まる。C2a=rRの場合とC2a≠rRの場合に分けて最大舵速度の発生時刻を求める。
【0142】
C2a=rRの場合には、C1a>0ならばβa<0になり、参照針路の角加速度ψ"Raは下向きに凸となり、C1a<0ならばβa>0になり、参照針路の角加速度ψ"Raは上向きに凸となる。このため、最大舵速度は開始時に生じる。
【0143】
C2a≠rRの場合、さらに両者の大小関係の差が大きい場合と小さい場合とに分ける。この場合分けは、(66式)において差が大きい場合は(C2a−rR)成分が、差が小さい場合はC1a成分がそれぞれ支配的な状態であることに相当する。
【0144】
まず、差が大きい場合について検討する。C2a≫rRならば、βa<0になり参照針路の角加速度ψ"Raは下向きに凸となり、最大舵速度はC1a≧0ならば開始時に、C1a<0ならば終端時に生じる。同様に、C2a≪rRならば、βa>0になり参照針路の角加速度ψ"Raは上向きに凸となり、最大舵速度はC1a>0ならば終端時に、C1a≦0ならば開始時に生じる。表3にまとめる。
【0145】
【表3】
ところが、C2aとrRの差が小さい場合、特に、C2a>rRでC1a<0及びC2a<rRでC1a>0の場合は、上記表3とは異なり、以下で説明するように、最大舵速度の発生時刻が終端時ではなく開始時に起こり、最大舵速度の発生時刻が異なり、C2aとrRの大小関係で発生時刻を一義的に決定することができなくなる。そのため、それらの場合には角速度rRに修正量を加えて差が大きい場合に変更することで、その条件から回避する必要がある。
【0146】
3.1.2 角速度修正量について
C2a>rRでC1a<0の場合及びC2a<rRでC1a>0の場合について、終端時t=Taについて調べる。|C2a−rR|>0で両者の差が小さいとき、(66式)のt=Taは、
【0147】
【数68】
となり、加速時間Taは差に比例して微小になる。ここで、Δr=−6(C2a−rR)とおく。但し、C1a<0のときに√の係数を−にしている。このとき、(64式)のβaはTa成分よりもC1a成分が支配的になる。即ち、
【0148】
【数69】
になる。ここで、ε=CRaTaとしている。上式を(3式)に代入し、(6式)を用いる
と、
【0149】
【数70】
になり、(69式)を微分すると
【0150】
【数71】
になる。
【0151】
舵速度は、(19式)より
【0152】
【数72】
で与えられる。開始及び終端時刻でのψ"Ra、ψ"' Ra、は、
【0153】
【数73】
になるから、舵速度の大小関係は絶対値をとって開始及び終端時刻とで比較をすると(|a+b|≦|a|+|b|)、
【0154】
【数74】
になる。但し、ここで、Ta/Tsn<2とする。よって、C2a−rRの差が小さいときには、最大舵速度はt=Taではなく、t=0で生じて、表3と矛盾が生じることが分かる。
【0155】
そこで、t=0での舵速度をt=Taと同じにする条件を求める。その場合、時刻t=0とTaとで、ψ"'Ra(t)は同じになる。差が小さいときのψ" Ra(t)の係数αaは、αa=C1a−ε、差が大きいときのψ"Ra(t)の係数αaは、αa=−CRaTa+C1aとなり、極性が逆になっている。つまり、差の大きさによりαaがゼロになる場合を生じることになる。αaがゼロのとき、つまり、βa=−C1aのとき、ψ"'Raは時間に無関係になるので、舵速度への関与は一定となる。即ち、
【0156】
【数75】
となり、舵速度に比例するψ"'Ra+(1/Tsn)ψ" Raは、
【0157】
【数76】
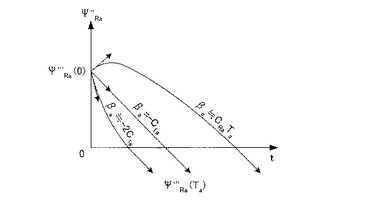
となる。βaによるψ"Raの様子を図5に示す(但し、C2a<rRでC1a>0の場合)。
【0158】
βa=−C1aとなるときの舵速度の大小関係を調べると、
【0159】
【数77】
になり、(73式)に比べ差の大きさは小さくなる。しかし、最大舵速度の時刻はTsn項の影響を受けるため、安定船の場合、t=Taで最大となり、C2a>rRでC1a<0、及びC2a<rRでC1a>0の場合の条件を満足するが、不安定船の場合には、t=0で最大となり、条件を満足できない。以下各々の場合を説明する。
【0160】
3.1.2.1 安定船の場合
安定船の場合、(76式)においてTsn項により舵速度はt=Taで最大となる。
(i) C2a>rRでC1a<0の場合
βa≦−C1aになるように設定すればよいので、この不等式を(64式)を用いて変形すると、
βa=CRaTa−2C1a≦−C1a
CRaTa≦C1a
となる。
【0161】
C2a>rRでC1a<0でありCRa<0であるから、
Ta≧C1a/CRaであり、(66式)から
【0162】
【数78】
となる。2乗して極性に注意して整理すると、
【0163】
【数79】
【0164】
【数79a】
となる。
【0165】
(ii) C2a<rRでC1a>0の場合
βa≧−C1aになるように設定すればよい。同様にこの不等式を変形すると、
βa=CRaTa−2C1a≧−C1a
CRaTa≧C1a
となり、
C2a<rRでC1a>0でありCRa>0であるから、
Ta≧C1a/CRaであり、
【0166】
【数80】
となる。2乗して極性に注意して整理すると、
【0167】
【数81】
【0168】
【数81a】
となる。
【0169】
3.1.2.2 不安定船の場合
不安定船の場合、(76式)においてTsn<0より舵速度の最大値はt=Taでなくt=0で生じるので、t=0での舵速度をt=Taでの舵速度以下に設定すればよい。
(i) C2a>rRでC1a<0の場合
(26式)、(64式)から
【0170】
【数82】
が得られる。さらに、
【0171】
【数83】
を得る。これを、(64式)のt=Taのβaに代入すると、
【0172】
【数84】
になる。ここで、
【0173】
【数85】
である。(83式)及び(84式)からTaを取り出して、それを(66式)に代入すると、
【0174】
【数86】
となる。さらにこれを極性に注意して整理すると、
【0175】
【数87】
【0176】
【数88】
として求まる。
【0177】
(ii) C2a<rRでC1a>0の場合
(i)と同様に(26式)、(64式)から
【0178】
【数89】
が得られる。そして、同様の計算を行なうと、
【0179】
【数90】
【0180】
【数91】
を得る。
【0181】
3.1.2.3 角速度修正量のまとめ
(78式)、(80式)、(86式)、(89式)においてrCは角速度修正量を示し、CRaの極性と逆である。この結果、これら式を満足するときに最大舵速度は終端時間で生じ、その設定値になるが、満足しないとき角速度rRを修正量rCと初期値C2aを用いて
【0182】
【数92】
に置き換えることによって、安定船不安定船の双方で時刻t=0とt=Taの舵速度の大きさは等しく、その最大舵速度とすることができる。
【0183】
以上の関係をまとめると次の表になる。
【0184】
【表4】
【0185】
3.2 初期値を含んだ舵角の導出
最大舵角は初期値による増加分でその許容値を超える場合を生じる。そのため初期値を含んだ舵角の式を求める。(35式)、(36式)に(64式)を代入して、初期値C1aの1次項までで近似すると、
【0186】
【数93】
になる。(92式)は安定船不安定船の双方に対応する。舵角の極値である最大舵角はβaに依存するため、最大舵速度の発生時間毎に求める。
【0187】
3.2.1 最大舵速度が開始時間で生じる場合
舵角と加速時間との関係式は、極値時間tpを(64式)のt=0のβaと舵角の式である(20式)に代入してC1aの1次項までで近似すると、
【0188】
【数94】
【0189】
として得られる。(40式)ではTaの2次式を用いたが、ここでは3次式まで用いている。その理由は、C1aのTaの3次係数が2次係数と比べ十分に小さくならず省略できないためである。(93式)から舵角は加速時間Taと初期値C1a、C2aとを用いて算出できる。算出した舵角の絶対値が設定値である許容舵角を超えた場合、舵角の絶対値は加速時間を変更することによって許容舵角に一致させる。即ち、(93式)で舵角δRを設定値である許容舵角δ0に置き換えると、Taの3次方程式は、
【0190】
【数95】
になり、Taは求まる。Taよりβaが求まり、角速度rRは(11式)より求まる。
【0191】
3.2.2 最大舵速度が終端時間で生じる場合
舵角と加速時間の関係式は、極値時間tpをt=Taのβaと舵角の式である(64式)に代入してC1aの1次項までで近似すると、
【0192】
【数96】
【0193】
として得られる。同様に、算出した舵角の絶対値が許容舵角を超えた場合、舵角の絶対値は加速時間を変更することによって許容舵角に一致させる。即ち、(95式)で舵角δRを許容舵角δ0に置き換えると、Taの3次方程式は、
【0194】
【数97】
になり、Taは求まり、また、Taよりβaが求まり、角速度rRは(11式)より求まる。
【0195】
4.小角度対応
船体運動の初期値がゼロでないC1a≠0、C2a≠0において、参照針路は初期値を減衰して、変針量に一致するように構成される。このときに、変針量が小さいと、旋回角速度が小さく設定されることになる。ところが、初期値を減衰させるために必要である方位変化量が変針量よりも大きいときには、小さい旋回角速度で旋回するために、変針時間がかかってしまう、という問題がある。この状態を小角度と呼ぶ。
【0196】
この対応として、方位変化量が変針量より大きいと判断した場合、小角度対応として加速モードを減衰モードと通常モードとに分けて、減衰モードで初期値を減衰した後、次の通常モードでその間の方位変化と変針量との和を改めて変針量に置き換えて、加速モードの参照針路を求めるようにする。
【0197】
減衰モードを発生させるか否かの判定の具体的な計算は、まず、初期値に起因した方位変化量ψiniを求める。初期値に起因した方位変化量ψiniは、加速時間Taと加速定数βaとを求めると、(5式)、(6式)から
【0198】
【数98】
で得られる。次いで、この方位変化量ψiniと変針量とを比較して、小角度対応するかどうかを決定する。
【0199】
5.船体モデルの修正
以上の説明においては、フィードフォワード制御器12−2の伝達関数を、船体プラントの伝達関数P(s)の逆特性を有すると仮定して、具体的には、特許文献1で示すものと同じ(式1)を用いて解析している。
【0200】
しかしながら、特許文献1の(式1)の野本の1次モデルを用いた船舶用自動操舵装置では、実船において変針後にオーバシュートを生じる場合がある。オーバシュートの原因は、実際の船体特性と制御系の船体モデルとの差異が無視できないことに起因すると考えられる。従って、適切な船体モデルを特定する必要がある。
【0201】
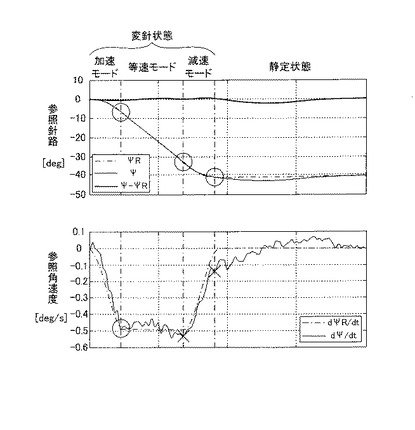
図6は、参照針路及び参照針路の1階微分の変針応答の時間変化を表しており、参照針路ψRに対する船首方位ψの偏差誤差は、変針状態において無視できる程小さく、静定状態の開始時において偏差誤差はほぼゼロで、その後、オーバシュートを生じ、再びゼロに収斂している。参照角速度dψR/dtに対する旋回角速度dψ/dtの偏差誤差は、変針状態の終端時において加速モードで一致し、等速モードで誤差を生じ、減速モードでゼロに戻らず誤差を持ち、静定状態において開始時の誤差(初期値)がゼロに収斂する。よって、静定状態の方位のオーバシュート発生は、角速度初期値に起因していることと考えられる。
【0202】
まず、モデルとして野本の1次モデルと2次モデルとを考える。
野本の2次モデルは、
【0203】
【数99】
【0204】
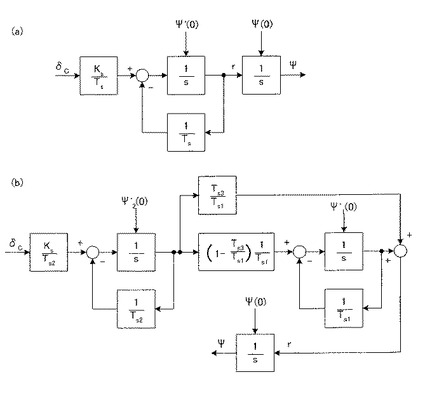
として表される。ここで、δcは命令舵角を、Ks、Ts1、Ts2、Ts3は船体パラメータで旋回力ゲイン、3つの時定数を示す。船体パラメータの極性はTs2>0、Ts3>0で、安定船ではKs>0、Ts1>0、不安定性ではKs<0、Ts1<0である。時定数の大小関係は、|Ts1|>Ts3>Ts2となる。野本の1次モデルと2次モデルのそれぞれのブロック図を図7(a)、(b)にそれぞれ示す。同図でψ(0)、ψ’(0)、ψ'1(0)、ψ'2(0)は初期値を、r=dψ/dtを示す。
【0205】
静定状態は、フィードバック制御器12−3による閉ループ応答になる。
【0206】
【数100】
【0207】
ここで、KP、KDはフィードバックゲインでそれぞれ比例ゲインと微分ゲインを示す。静定状態の初期条件は、
【0208】
【数101】
と定める。ここで、ψR0は参照針路の変針量を示す。
【0209】
(99式)を(98式)に代入すると、
【0210】
【数102】
になる。但し、ψ'10=ψ'1(0)、ψ'20=ψ'2(0)としている。上式に静定状態の初期条件を当てはめると、
【0211】
【数103】
となる。ここで、特性多項式を実数a、減衰係数ζ及び固有周波数ωnで因数分解することができると仮定している。
【0212】
静定状態の応答は、上式から第1項が一定値になり、第2項が時定数Ts1とTs2の1次遅れ要素によるそれぞれψ'10、ψ'20との初期値応答になる。両者の初期値応答の差異は、分母の特性多項式が共通であるから、分子の係数及び初期値の大きさにより決定される。差異を調べるために、次式
【0213】
【数104】
を定める。ここで、Tcは時定数、Gはゲインを示す。上記の時間解は0<ζ<1とおく
と、
【0214】
【数105】
になる。ここで、
【0215】
【数106】
を示す。(104式)より、応答の振幅およびピーク値はGの大きさに比例し、ピーク時間はsin項のみの場合に比べcos項の係数Aに比例して早まる。(101式)の特性方程式
【0216】
【数107】
から、実数aの近似解は時定数の大小関係|Ts1|>Ts3>Ts2より|Ts1|≫Ts2を用いると、
【0217】
【数108】
になる。また、A,Bの分母は、a2−2ζωna+ωn2=(a−ζωn)2+ωn2(1−ζ2)>0となる。ψ'10、ψ'20との初期値応答は、(104式)の特性により次のようになる。
【0218】
・初期値ψ'10の場合
Tc=Ts2、G=ψ'10よりA≒0、B≒1に近似できる。応答は(104式)において、sin項が支配的になり、1次モデルの場合とほぼ同じになる。これにより、ψ'10≒ψ'0となる。
・初期値ψ'20の場合
Tc=Ts3、G=ψ'20Ts3/Ts1よりA>0、B<1になる。応答は初期値ψ'10の場合に比べて、ピーク値がψ'20≒ψ'10を仮定して、
【0219】
【数109】
になるため減少し、ピーク時間が早まる。
【0220】
これにより、静定状態の初期値応答は時定数Ts2に起因したものより時定数Ts1に起因したものが支配的になる。よって、初期値ψ'20に対応する時定数Ts2の1・BR>汳Xれ要素は2次モデルの分母から省略することができる。一方で、2次モデルの分子の時定数Ts3はオーバシュートの発生抑制のために存在する必要がある。
【0221】
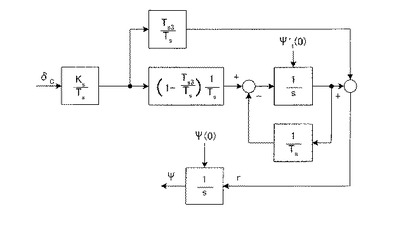
そこで、本発明では、船体モデルとして図8に示すように、
【0222】
【数110】
を採用し、フィードフォワード制御器12−2の伝達関数は、その逆数の特性となるように、
【0223】
【数111】
と設定し、時定数Ts3を更なる船体パラメータとする。
【0224】
しかしながら、軌道演算部12−1の構成は変更せずに、前項1〜4で説明してきたように、1次モデルを用いて演算を行なう。なぜならば、設定された最大舵角及び最大舵速度は、時定数Ts3の存在によるローパスフィルタ効果で抑制されるため、操舵機への要求が低減される方向になるからであり、また、船体運動の初期値に対する変化はないからである。
【0225】
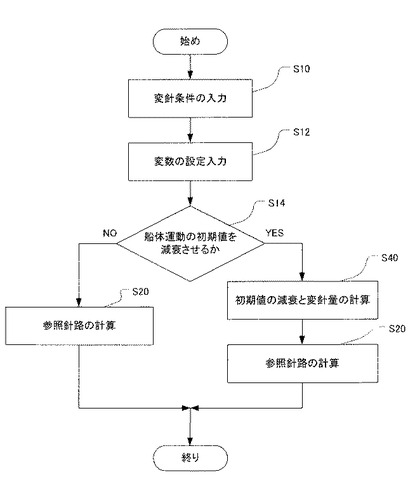
6.軌道演算部の処理
軌道演算部12−1で行なわれる処理について図9ないし図11のフローチャートに基づき説明する。
【0226】
ステップS10:まず、変針条件が入力される。変針条件は、所望される変針量Δψ0、指定旋回角速度r0、船体運動の初期値C1a、C2a、船体パラメータのノミナル値Tsn、Ksn、許容舵角δ0、舵速度の上限値δ'RH、下限値δ'RLなどがある。
【0227】
船体運動の初期値C1a、C2aは、変針開始時に変針中であったときの前回の変針に対して軌道演算部で演算を行った参照針路の2階微分と1階微分との変針開始時の値から求めることとする。即ち、前回の変針時における時間t'で次の変針の設定があったときに、初期値は、前回の変針時の参照針路の2階微分ψ"R(t')=C1aと1階微分ψ'R(t')=C2aとする。これにより、ノイズの影響を受けない初期値を得ることができる。
【0228】
ステップS12:次いで、変数の設定を行なう。舵速度の制限値δ'RH、δ'RLに対する図4に示す変針領域の設定を行う。このときには、ΔψRL、ΔψRHは(56式)(58式)から求めることができる。
【0229】
ステップS14:次いで、船体運動の初期値を減衰させる、即ち小角度対応を行なうか否かを判定する。具体的には、方位変化量ψiniと変針量Δψ0の比較を行なう。(97式)から方位変化量を求める。尚、(97式)における加速時間Taと加速定数βaは、rR=0、δ'Rは制限値(上限値または下限値)として(66式)及び(64式)から求められたものを用いる。
【0230】
ステップS20:減衰モードを実行せずに通常モードのみを行なう場合、以下で説明する参照針路の計算を行なう。
【0231】
ステップS40:減衰モードを実行する場合には、以下で説明する初期値の減衰と変針量の計算を行なう。ステップS40の後、ステップS20の参照針路の計算を行なう。
【0232】
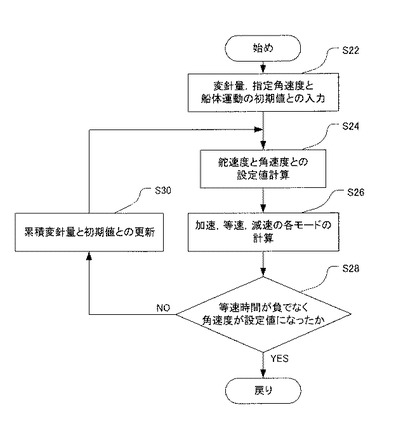
次に、加速モードの通常モードの場合の参照針路の計算は、図10に示すフローチャートに基づき行ない、所望される変針量、設定の角速度及び初期値とから参照針路を求める。
【0233】
ステップS22:変針量Δψ0、角速度r0及び船体運動の初期値C1a、C2aの入力を行なう。そのため、ノイズの影響を受けない初期値を得ることができる。
【0234】
ステップS24:初期値C1a、C2aを用いずに、変針量ΔψRに対する舵速度δ'Rと角速度rRを求める。
【0235】
即ち、与えられた変針量ΔψRに対してステップS12で設定された図4の変速領域のいずれの領域に属するかを判定し、該当する舵速度δ'Rを求める。また、旋回角速度を(61式)を用いて求める。旋回角速度が指定旋回角速度r0を超えるときには角速度rR=sign(ψR)r0とする。
【0236】
ステップS26:加速、等速、減速の各モードの計算を行なう。各モードの定数を求める。加速モードについては、最大舵角を許容舵角以下にする条件で初期値を減衰させ、且つ終端時の旋回角速度を基準角速度rRに一致させるように設定する。但し、基準角速度rRについては、表4に示した条件を判定し、C2a>rRでC1a<0の場合、及びC2a<rRでC1a>0の場合には(91式)の修正を行う。
【0237】
また、加速時間Taと加速定数βaは、(66式)及び(64式)から求められたものを用いるが、(93式)または(95式)で求めた舵角δRが設定値である許容舵角を超えてしまう場合には、(94式)または(96式)よりTaを求め、(64式)から加速定数βaを、(11式)から角速度rRを求める。
【0238】
変針量ΔψRと各モードの変針量の総和との誤差は等速時間を修正することで、打ち消す。即ち等速時間は、
【0239】
【数112】
【0240】
【数113】
【0241】
になる。ここで、Δψ0、ΔψRa、ΔψRv、ΔψRdは変針量でそれぞれ設定値、加速、等速、減速のモードの変針量を表し、(・)*は修正値を、Tvは等速時間を、rRは角速度を表す。
【0242】
ステップS28:等速時間が負でなく、角速度が基準角速度(ステップS24で求めた角速度)になったかどうかを判定する。判定は等速時間がゼロ以上であり、且つ角速度と基準角速度との絶対値の誤差が収束値ε以下のときに次のステップに進み、そうでないときに繰り返しループに戻る。
【0243】
ステップS30:ステップS28で判定がnoである場合、累積変針量と初期値との更新を行なう。加速モードによる方位変化を変針量に加えて、加速モードの終了時の角速度を角速度の初期値に置き換える。即ち、
【0244】
【数114】
【0245】
【数115】
【0246】
【数116】
になる。ここで、Δψ*0は修正変針量を、ΣΔψRaは加速モードの累積値をそれぞれ示す。
【0247】
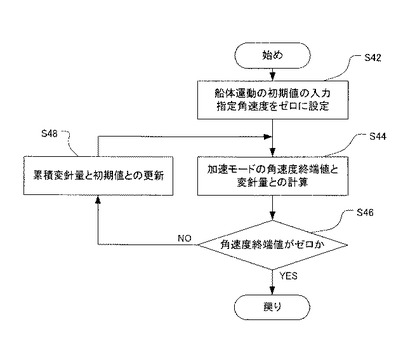
次に、減衰モードは、図11に示すフローチャートに基づき行ない、変針量を考慮しないで舵速度を制限値として初期値の絶対値をゼロに漸近させ、その過程で生じた方位変化を蓄積する。
【0248】
ステップS42:船体運動の初期値の入力と基準角速度ゼロの設定を行なう。
ステップS44:加速モードの角速度終端値と変針量(97式)との計算を行なう。
ステップS46:角速度終端値がゼロか否かの判定を行なう。判定は、終端値の絶対値が収束値ε以下のときに次のステップに進み、そうでないときに繰り返しループに戻る。
ステップS48:ステップ30と同様の処理を行なう。
【0249】
以上のようにして演算された参照針路は、順次、フィードフォワード制御器12−2に出力されて、そこで、フィードフォワード舵角δFFが演算されて、フィードバック制御器12−3からのフィードバック舵角δFBが加算器12−5で加算された後、操舵機16へと出力される。参照針路は、Ksn、Tsnを基準に計算しているが、船体モデルは(109式)Ts3nを含むために、フィードフォワード制御器12−2における演算にあたっては、(110式)で示すように、参照針路はTs3nの1次遅れ系を通過させた時間関数解とする。これによって、変針時のオーバシュートを防止する。
【0250】
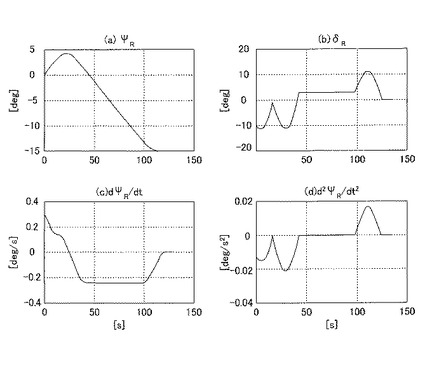
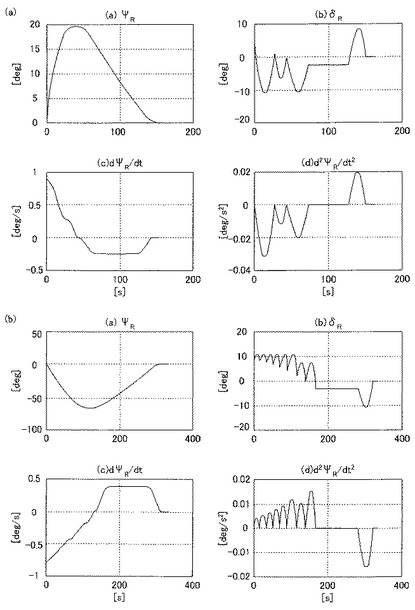
図12及び図13は、様々な条件におけるシミュレーション結果を示している。図12は、不安定船の大角度変針時を表しており、Δψ0=−15deg、C1a=0.01deg/s2、C2a=0.3deg/sの条件で、1回の加速モードでは基準旋回角速度に収束できないために2回の加速モードを組み合わせている例である。図13(A)は安定船の小角度変針時を表しており、Δψ0=0deg、C1a=0deg/s2、C2a=0.9deg/sの条件で、2回の減衰モードで初期値を減衰させた後、1回の通常モードで基準角速度に収束させている例である。図13(B)は不安定船の小角度変針時を表しており、Δψ0=0deg、C1a=0deg/s2、C2a=−0.8deg/sの条件で、7回の減衰モードで初期値を減衰させた後、1回の通常モードで基準角速度に収束させている例である。
【0251】
7.等減速比の変形例
以上の説明では、等減速比を前掲2.3章で説明したように固定値で設計し、これによって、加速・等速・減速の釣合を重視している。しかしながら、この設計では、大きな変針でないと、角速度rRを指定旋回角速度r0に一致させることができない。
【0252】
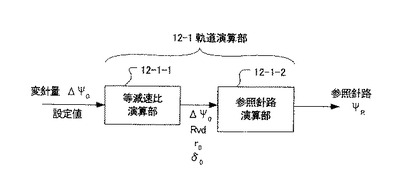
そこで、等減速比を固定から可変とした変形例に基づく軌道演算部12−1を図14に示す。軌道演算部12−1は、等減速比演算部12−1−1と、参照針路演算部12−1−2とから構成し、参照針路演算部12−1−2は、図1の軌道演算部12−1と同じ作用を果たすものとする。等減速比演算部12−1−1では、変針開始時点の旋回角加速度の初期値C1aと旋回角速度の初期値C2aをゼロとして旋回角速度rRを求め、その際に、旋回角速度rRが指定旋回角速度r0に等しいと仮定したときに、舵角δRが許容舵角δ0以下の条件を満足するときに、旋回角速度rRを指定旋回角速度r0に決定し、該条件を満足しないときに、舵角δRと許容舵角δ0との偏差を最も小さくする角速度を旋回角速度rRに決定し、それを新たな指定旋回角速度とする。そして、その決定された指定旋回角速度における最大舵速度δR’を舵速度上限値とする。
【0253】
そして、舵角δRが許容舵角δ0以下の条件を満足するかどうかを判定するときに、等減速比Rvdを変化させながら、条件を満足するかを判定する。そして等減速比Rvdを変化させても舵角条件を満足しない場合には、角速度rRを変化させて、舵角条件を満足させる角速度rRを見つける。等減速比演算部12−1−1で行う具体的処理について以下、説明する。
【0254】
7.1 準備
ここで、今までの説明に登場し、且つ以下の説明で用いる関係式を整理する。この等減速比演算部12−1−1においては初期値C1a、C2aを考慮しない関係式を使用する。
【0255】
【数117】
【0256】
【数118】
【0257】
【数119】
【0258】
【数120】
【0259】
【数121】
【0260】
【数122】
であり、Cψ、CRは、(30式)、(60式)から
【0261】
【数123】
【0262】
【数124】
である。
【0263】
7.2 最大舵角で等減速比Rvd≧0が実現できる角速度
舵速度の制限がなしとして、許容舵角δ0、等減速比Rvd≧0で実現できる指定旋回角速度r0を求める。(119式)のrRをr0に、(120式)のδRをδ0にそれぞれ置き換えると、Rvdの2次方程式
【0264】
【数125】
を得る。ここで、各係数は、以下の通りである。
【0265】
【数126】
【0266】
判別式D=b2−4ac≧0のとき、r0は実現し、D<0のとき、r0は実現しない。D<0になるときには、D=c12−1/4=0を満足するr0が実現できる角速度となる。まとめると、許容舵角の下で実現できる角速度は、
【0267】
【数127】
により決まる。
【0268】
7.3 許容舵速度で等減速比Rvd≧0が実現できる角速度
さらに、許容舵速度δ0’、最大舵角の制限なし、等減速比Rvd≧0で実現できる角速度rRを求める。δ0に対応するCRをCR0とすると、
【0269】
【数128】
になる。等減速比Rvd maxがεより小さいときには、rRは実現できないので、その場合には、角速度rRを
【0270】
【数129】
のように下げる。ここで、εは10−3程度の設定値とする。まとめると、
【0271】
【数130】
となる。
【0272】
7.4 最大舵角との比較
上記(130式)、(131式)で決めたRvd、rRとしたときに舵角の最大値が許容舵角δ0を超えていないかどうかを確認する。具体的には、(130式)、(131式)で決めたRvd、rRを用いて、(116)式、(117)式、(119)式から舵速度δR’を求め、求めた舵速度δR’を用いて、(120式)から舵角δRを求め、求めた舵角δRと許容舵角δ0との比較を行い、δR≦δ0であれば、7.7の手順に進む。δR>δ0であれば、まず、優先度の最も低いRvd>0を調整して変針条件に適合させ、次いで、優先度がRvdの次に低いrRを調整して変針条件に適合させる。そのための準備として、まず、舵角δRの等減速比Rvdに関する特性及び角速度rRに関する特性をそれぞれ調べる。
【0273】
7.4.1 舵角δRの等減速比Rvdに関する特性
(119式)を(120式)に代入して、δRのRvdに関する一次微分、二次微分を求める。すると、
【0274】
【数131】
【0275】
【数132】
となり、これにより、δRはRvdに関して下に凸関数で、極小値は、
【0276】
【数133】
のとき生じることが分かる。変針条件によってRvdmin<0になる場合が生じるが、その場合は条件Rvd>εから単調増加の関数として扱う。
【0277】
7.4.2 舵角δRの角速度rRに関する特性
同様に、(119式)を(120式)に代入して、δRのrRに関する一次微分、二次微分を求める。すると、
【0278】
【数134】
【0279】
【数135】
になる。これにより、δRはrRに関して単調増加の関数であることが分かる。
【0280】
7.5 等減速比Rvdの調整
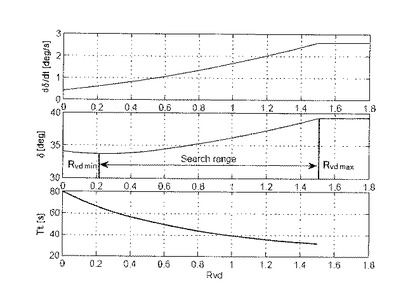
前述のように、等減速比RvdがRvdminのときδRは最小値となり、また、δ0’になるときのRvdmaxのときにδRは最大値となる。図15は、横軸を等減速比Rvdとし、縦軸を舵速度δR’、舵角δRと変針時間Ttである。舵角δRはRvdminで最小値となり、Rvdmaxでδ0となる。従って、変針時間Ttを短くし、解を1つにするために、Rvdの探索範囲は、[Rvdmin,Rvdmax]とし、この範囲でδRとδ0との誤差を最小にするRvdを黄金分割等の任意の手法により求める。
【0281】
7.6 角速度rRの調整
7.5で得られたRvdを用いて、7.4の手順を用いて、舵角δRを求め、舵角δRが許容舵角δ0との比較を行い、δR≦δ0であれば、7.7の手順に進む。δR>δ0であれば、範囲[0,rR]で、δRとδ0との誤差を最小にする角速度rR を黄金分割等の任意の手法により求める。
【0282】
7.7
以上の手順で決定した等減速比Rvd、角速度rR、舵速度δR’を用い、角速度rR、舵速度δR’をそれぞれ変針条件の指定旋回角速度r0、舵速度の上限値δRH’とし、下限値δRL’=δRH’×0.5として、参照針路演算部12−1−2に入力する。参照針路演算部12−1−2は、前述の6.軌道演算部の処理を実行する。舵速度の上限値δRH’は、許容舵速度δ0’以下となる。
「6.軌道演算部の処理」におけるステップS24では、変針領域Smallになり、舵速度はδRH’となるため、角速度rRは指定旋回角速度r0を実現できることになる。
図16はそのシミュレーション結果であり、図16(A)は等減速比Rvd=2.23の一定とした場合、(B)は等減速比Rvdを可変とした場合である。等減速比Rvdを可変とすることによって、角速度rRを指定旋回角速度r0に一致させることができる。
【0283】
8.増減速時のロバスト性向上
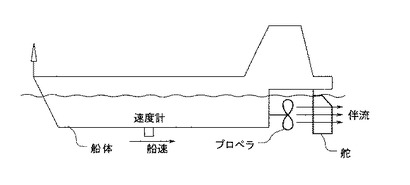
プロペラと舵との位置関係は図17に示すように前後に並んでおり、プロペラによる伴流が舵回りに沿って行くようになっている。操縦性指数の旋回力ゲインKsは舵回りの流速に比例するので、プロペラの回転数あるいはピッチ角が変化すると旋回力ゲインも同様に変化する。一方、船体の速度は大きな時定数の一次遅れ系のためにゆっくりと変化する。そのため伴流速度と船速との応答差が生じ、船速により旋回力ゲインを修正したとしてもその効果が期待できず、変針量および角速度は図18(a)に示すように推進力変化前の設定値を保持できない、という問題を発生する。また操縦性指数の時定数は、伴流の影響よりも船体と船速との関係によって支配される傾向をもつ。したがって増減速開始から定常船速に達するまで操縦性指数の時定数は一次遅れのゆっくりした変化になり、旋回力ゲインはそれに比べ迅速に変化する。よって旋回力ゲインのパラメータ不確かさに対する変針制御系のロバスト性の向上が課題になる。
【0284】
8.1 解決方法
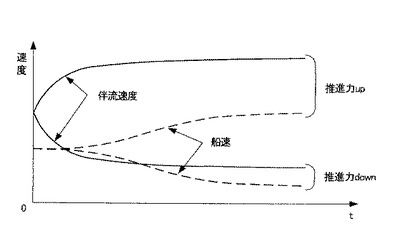
船速は図17から船体に取り付けた速度計によって得られるが、伴流速度は直接に得られない。両者の時間応答は図19に示すように、伴流速度の方が船速の方より立上り時間が早いことが予想される。伴流速度の定常値は圧力差から船速のそれより高い。したがって船速変化時の旋回力ゲインは既に伴流速度が定常値に近づいている状態で実施されるので、伴流速度変化による旋回力ゲインを修正することは難しい。
【0285】
そこで、増減速時のスラスト変化が方位偏差となって表れる現象を利用して、旋回力ゲインの変化に伴う方位誤差または角速度誤差を低減する。変針応答はフィードバックによるものでなくフィードフォワードによるものが支配的であるから、対策はフィードフォワードに対して施す。
【0286】
参照針路ψRから船首方位ψまでの応答の方位比ψ/ψRは図18(a)を参照すると図18(b)のようになる。方位比は増速時で1以上に減速時で1以下になる。
方位比つまり伝達関数は、推進力変化に対する閉ループ応答がゆっくりなので無視すると、
【0287】
【数136】
の様に旋回力ゲイン比と等価になる。ここで、添字()aは実際値、()nはノミナル値を表しており、また、推進力変化は、プロペラ回転数に相当し、プロペラの下流部にある舵に作用するので、操縦性指数のうち、時定数Tsa、Ts3aへの影響を無視し、旋回力ゲインKsaに影響すると定め、Tsn=Tsa、Ts3n=Ts3aとする。これよりψ=ψRとするために、方位比
【0288】
【数137】
をフィードフォワード舵角δFFに掛けることによって、推進力変化を起因とする方位誤差を低減する。
【0289】
8.2 構成
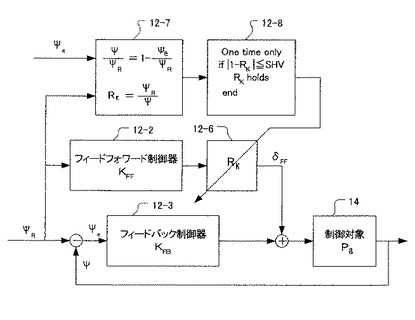
図20は、増減速時のロバスト性向上を行った変形例の構成を表すブロック図である。図示したように、フィードフォワード制御器12−2の後段に、方位比乗算器12−6を備え、さらに、方位比演算部12−7、方位比制限部12−8を備えている。
方位比乗算器12−6は、フィードフォワード制御器12−2から出力されるフィードフォワード舵角δFFに方位比RKを乗算するものである。
【0290】
方位比演算部12−7は、方位比乗算器12−6で用いる方位比RKを演算するものである。(138式)を直接使用すると、方位が360度発信となり扱いにくいので、方位偏差ψe=ψR−ψを用いて(参照針路ψRはゼロからの変針量とする)
【0291】
【数138】
の関係を使用してRKを求める。ここでRKの初期値は1である。
【0292】
さらに、パタメータ不確かさ、ノイズ成分などによる影響を低減するために方位比制限部12−8で方位比乗算器12−6の方位比RKの変更に制限を掛ける。制限は、RKの変更に不感帯を設けることで行う。不感帯はパタメータ不確かさなどから10%から30%とするとよい。例えば、不感帯を10%とすると、初期値RK=1であるときに、しきい値Slash Hold Value SHV=0.1となり、方位比演算部12−7で求められた方位比RKが0.9未満、または1.1より超えたときに、方位比乗算器12−6の方位比RKを書き換える。
推進力変化に伴い船速も変化すると、船速修正が行われる。即ち、
【0293】
【数139】
であり、V、V0は船速で現在値と直前値を表す。なお船速修正はノミナル値や制御ゲインを更新するもので、参照方位やフィードフォワード舵角には反映されない。変針命令時に更新されたパラメータを用いて軌道計画が構成される。つまり船速修正の効果は変針命令がないと発揮されない。
【0294】
舵まわりの伴流速度は既に定常値に達しているので、船速修正が施されるとKsn=Ksaになり、旋回力比は1になり、その結果方位比も1に漸近する。方位比制限部12−8の制限を維持すると方位比が1に漸近できなくなるので、方位比制限部12−8の作動は、変針毎に一回限りとする。
【0295】
さらに方位比制限部12−8では、SHV の他に別の制限を加えることも可能である。変針量が小さい設定値以下のとき、SHVの制限と論理積を取って制限することも可能である。
尚、方位比の代わりに、応答性のよい角速度比を用いることも可能であるが、ノイズ成分による誤差が大きいため、方位比で修正することが望ましい。また、しきい値として、暴走対策として上限値を設定することもできる。
【0296】
以上で説明した、設定針路に船首方位を追従させるように制御する船舶用自動操舵装置は、計画航路に船体位置を追従させる航路制御系の一部として使用することも可能である。
【符号の説明】
【0297】
12 船舶用操舵装置
12−1 軌道演算部
12−2 フィードフォワード制御器
12−3 フィードバック制御器
rR 旋回角速度
C1a 旋回角加速度初期値
C2a 旋回角速度初期値
【技術分野】
【0001】
本発明は、船舶用自動操舵装置に関し、その変針時の性能向上を行うことができる船舶用自動操舵装置に関する。
【背景技術】
【0002】
船舶用自動操舵装置は、設定針路にジャイロコンパスからの船首方位を追従させるために舵を制御する装置であり、変針時における性能向上を図ったものとして、本出願人による特許文献1に記載されたものが知られている。図1を用いて、その構成を簡単に説明する。図1は、船舶用自動操舵装置12、操舵機16及び船体18を含む全体のブロック図であり、操舵機16と船体18とが制御対象14となる船体プラントとなる。
【0003】
船舶用自動操舵装置12に入力信号として設定針路即ち所望される変針量、設定値及び
船首方位とが入力され、出力信号として命令舵角が出力される。
【0004】
そして、船舶用自動操舵装置は、設定針路が入力され参照針路を出力する軌道演算部と、フィードフォワード制御器と、フィードバック制御器と、第1及び第2の加算器と、を有している。
【0005】
特許文献1では、このフィードフォワード制御器の伝達関数は、制御対象である船体プラントの伝達関数P(s)の逆特性を有するように設定されており、具体的には、野本の1次モデル
【0006】
【数1】
を用いて
【0007】
【数2】
となるように設定される。ここで、KS、TSは船体パラメータで、それぞれ旋回力ゲインと時定数、sはラプラス演算子である。
【0008】
軌道演算部は、設定針路、設定値及び船首方位を用いて参照針路を演算し、出力するものである。設定値としては、変針時の旋回角速度、フィードフォワード舵角δFFの最大値及びフィードフォワード舵角の角速度δFF’の最大値がある。また、船首方位は、変針中に新たに別の変針を実施する場合等の変針開始時に旋回角速度と旋回角加速度がゼロでない場合に、これらの値を得るために使われる。
【0009】
そして、参照針路は次のような条件を満足するように構成される。
(1)加速モード、等速モード及び減速モードの3モードより構成され、各モード毎に時間管理される。参照針路ψR(t)は、各モード毎に時間tを変数とする関数となる。
(2)加速モードと減速モードでは、参照針路ψR(t)の時間tに関する2階微分は2次関数となる。
(3)等速モードでは、参照針路ψR(t)の時間tに関する1階微分は一定であり、2階微分はゼロである。
(4)加速モードでは、参照針路ψR(t)は船舶の旋回角加速度C1a及び旋回角速度C2aの値を初期値として取り込む。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開平8−207894号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
引用文献1では、制御対象の特性を考慮した変針軌道計画が実現可能となるという利点を有しているものの、次のような問題点が存在する。
・船体運動の変針中に新たに別の変針を実施する場合等の、変針開始時に旋回角速度と旋回角加速度がゼロでない場合に、その角加速度初期値C1aと角速度初期値C2aと最大旋回角速度rRとの関係が、C2a>rR、C1a<0またはC2a<rR、C1a>0のときに参照針路を適切に設定できない。
・角加速度初期値C1aと角速度初期値C2aがある場合に、その初期値を減衰させるために必要な変針量が設定される変針量より大きいと、変針時間が長くなるおそれがあり、適切に対応することができない。
・角加速度初期値C1aと角速度初期値C2aとを船首方位からの信号によって求めているが、船首方位からの信号はフィルタを通したとしても小さなノイズが重畳されているために、安定的な初期値を得ることが困難である。
【0012】
本発明は上記課題を解決して、より最適な変針軌道計画を実現し、よって、安定的、効率な操船を可能とする船舶用自動操舵装置を提供することをその目的とする。
【課題を解決するための手段】
【0013】
かかる目的を達成するために、本発明の請求項1に記載の発明は、船舶の所望される変針量に対して参照針路を演算して出力する軌道演算部と、該参照針路からフィードフォワード舵角を演算して開ループ制御を行うフィードフォワード制御器と、を有し、前記軌道演算部は、参照針路を加速モード、等速モード及び減速モードに分けて出力し、加速モードにおいて、変針開始時点の旋回角加速度の初期値C1aと旋回角速度の初期値C2aがゼロでない場合にその値を取り込んで参照針路を演算する船舶用自動操舵装置において、 前記軌道演算部は、前記初期値C1a、C2aをそれぞれゼロとして演算される参照針路に基づきフィードフォワード制御器から出力されるフィードフォワード舵角の舵速度が設定された最大舵速度を超えないように各モードを決めたときの加速モードの終端時及び等速モード時における旋回角速度rRを演算し、C2a>rRでC1a<0を満足する場合、またはC2a<rRでC1a>0を満足する場合には、加速モードにおける最大舵速度発生時点が各場合で常に同じになるように旋回角速度rRを修正し、該修正した旋回角速度rRを満足し且つ演算される参照針路に基づきフィードフォワード制御器から出力されるフィードフォワード舵角の舵速度が前記最大舵速度を超えないように各モードの参照針路を演算し、上記場合以外の場合には、修正しない旋回角速度rRを満足し且つ演算される参照針路に基づきフィードフォワード制御器から出力されるフィードフォワード舵角の舵速度が前記最大舵速度を超えないように各モードの参照針路を演算することを特徴とする。
【0014】
請求項2に記載の発明は、請求項1記載の前記軌道演算部の旋回角速度rRの演算を、等速モード及び減速モードのそれぞれの時間である等速時間及び減速時間の比を一定とした条件で行い、その結果が指定旋回角速度以上の場合には指定旋回角速度とし、指定旋回角速度以下の場合にその演算結果の角速度とすることを特徴とする。
【0015】
請求項3に記載の発明は、船舶の所望される変針量に対して参照針路を演算して出力する軌道演算部と、該参照針路からフィードフォワード舵角を演算して開ループ制御を行うフィードフォワード制御器と、を有し、前記軌道演算部は、参照針路を加速モード、等速モード及び減速モードに分けて出力し、加速モードにおいて、変針開始時点の旋回角加速度の初期値C1aと旋回角速度の初期値C2aとがゼロでない場合にその値を取り込んで参照針路を演算する船舶用自動操舵装置において、
前記軌道演算部は、前記初期値C1a、C2aをそれぞれゼロとして加速モードの終端時及び等速モード時における旋回角速度rRを求め、その際に、旋回角速度rRが指定旋回角速度r0に等しいと仮定したときに、演算される参照針路に基づきフィードフォワード制御器から出力されるフィードフォワード舵角が許容舵角以下の条件を満足するときに、旋回角速度rRを指定旋回角速度r0に決定し、該条件を満足しないときに、フィードフォワード舵角と許容舵角との偏差を最も小さくする角速度を旋回角速度rRに決定し、決定された旋回角速度rRとしたときのフィードフォワード制御器から出力されるフィードフォワード舵角の最大舵速度を求め、
C2a>rRでC1a<0を満足する場合、またはC2a<rRでC1a>0を満足する場合には、加速モードにおける最大舵速度発生時点が各場合で常に同じになるように旋回角速度rRを修正し、該修正した旋回角速度rRを満足し且つ演算される参照針路に基づきフィードフォワード制御器から出力されるフィードフォワード舵角の舵速度が前記最大舵速度を超えないように各モードの参照針路を演算し、上記場合以外の場合には、修正しない旋回角速度rRを満足し且つ演算される参照針路に基づきフィードフォワード制御器から出力されるフィードフォワード舵角の舵速度が前記最大舵速度を超えないように各モードの参照針路を演算することを特徴とする。
請求項4に記載の発明は、船舶の所望される変針量に対して参照針路を演算して出力する軌道演算部と、該参照針路からフィードフォワード舵角を演算して開ループ制御を行うフィードフォワード制御器と、を有し、前記軌道演算部は、参照針路を加速モード、等速モード及び減速モードに分けて出力し、加速モードにおいて、変針開始時点の旋回角加速度の初期値C1aと旋回角速度の初期値C2aがゼロでない場合にその値を取り込んで参照針路を演算する船舶用自動操舵装置において、
前記軌道演算部は、前記加速モードで前記初期値C1a、C2aを減衰させるために必要な方位変化量が所望される変針量よりも大きい場合に、加速モードを、初期値を減衰させる減衰モードと、前記等速モードの旋回角速度rRに収束させる通常モードとに分けて、それぞれのモードの参照針路を演算することを特徴とする。
【0016】
請求項5に記載の発明は、請求項1ないし4のいずれか1項に記載の旋回角加速度の初期値C1aと旋回角速度の初期値C2aが、変針開始時に変針中であったときの前回の変針に対して前記軌道演算部で演算を行った参照針路の2階微分と1階微分との変針開始時の値から求められることを特徴とする。
【発明の効果】
【0017】
請求項1及び3記載の発明によれば、C2a>rRでC1a<0を満足する場合、またはC2a<rRでC1a>0を満足する場合には、C2aとrRとの差異が大きい場合とその差異が小さい場合とで、舵速度が最大になる時点が異なるという不具合を発生するので、そのような不具合を回避するために、常に舵速度が最大になる時点を一定になるようにし、その時点での舵速度が最大舵速度を超えないようにすることで、安定的、効率的、安全な操船を行なうことができる。
【0018】
請求項2記載の発明によれば、等速時間の比率を一定とすることで、妥当な変針時間で省エネルギーを図ることができる。等速時間の比率を一定にしない場合には、大きい旋回角速度で変針時間を短くすることも可能になるが、省エネルギーの観点から好ましくない。本発明によれば、等速時間の比率を一定とすることで、等速時間のない場合に比べて省エネルギーを図ることができる。
【0019】
請求項4記載の発明によれば、所望される変針量が小さいと、初期値を減衰するために必要な方位変化量の方が大きくなる場合があり、かかる場合でも変針量が小さいものとして参照針路の演算を行なうと、変針時間が大きくなりすぎる不具合が発生するおそれがあるが、加速モードを減衰モードと通常モードとに分けてそれぞれのモードで適切にパラメータを設定することで、適切な参照針路を演算することができる。
【0020】
請求項5記載の発明によれば、変針中の新たな変針であれば、前回の変針のために演算した参照針路を用いて、新たな変針の開始時の初期値を得ることができる。そのため、ノイズの影響を受けない初期値を得ることができる。
【図面の簡単な説明】
【0021】
【図1】本発明の船舶用自動操舵装置と制御対象との全体のブロック図である。
【図2】参照針路とフィードフォワード舵角の時間変化(但し安定船の場合)を示すグラフである。
【図3】各モードにおける参照針路の2階微分と、1階微分の時間変化を示すグラフである。
【図4】舵速度と変針量の関係を表すグラフである。
【図5】加速モードの参照針路の2階部分特性を表すグラフである(但し、C2a<rRでC1a>0の場合)。
【図6】野本の1次モデルに準拠した参照針路及び参照針路の1階微分の変針応答の時間変化を表すグラフである。
【図7】(a)は野本の1次モデルのブロック図、(b)は野本の2次モデルのブロック図である。
【図8】本発明で採用する船体モデルのブロック図である。
【図9】軌道演算部で行う処理を表すフローチャートである。
【図10】軌道演算部で行う参照針路の計算処理を表すフローチャートである。
【図11】軌道演算部で行う減衰モードの計算処理を表すフローチャートである。
【図12】本発明のシミュレーション結果であり、不安定船の大角度変針時を表す。
【図13】本発明のシミュレーション結果であり、(A)は安定船、(B)は不安定船のそれぞれの小角度変針時を表す。
【図14】本発明の等減速比を可変とした変形例による軌道演算部のブロック図である。
【図15】等減速比に対する舵速度δR’=dδ/dt、舵角δRと変針時間Ttの特性を表すグラフである。
【図16】(A)は、本発明の等減速比を固定としたときのシミュレーション結果であり、(B)は本発明の等減速比を可変としたときのシミュレーション結果である。
【図17】船体のプロペラと舵との関係を表す模式図である。
【図18】推進力が変化したときの船首方位と方位比との関係を表すグラフである。
【図19】推進力が変化したときの伴流速度と船速との関係を示すグラフである。
【図20】本発明の増減速時のロバスト性向上を行った変形例の主要部分のブロック図である。
【発明を実施するための形態】
【0022】
以下、図面を参照しながら本発明の実施形態を説明する。
図1は、本発明の船舶用自動操舵装置12と、操舵機16及び船体18とからなる制御対象14とを含む全体のブロック図を示している。本発明の船舶用自動操舵装置12は、特許文献1と同様に、軌道演算部12−1と、フィードフォワード制御器12−2と、フィードバック制御器12−3と、第1及び第2の加算器12−4、12−5とを有している。
【0023】
軌道演算部12−1は、所望される変針量Δψ0及び設定値を用いて変針条件を満足する参照針路の時間関数を演算し、順次その参照針路ψRを時間の経過と共に、出力するものである。
【0024】
フィードフォワード制御器12−2は、参照針路からフィードフォワード舵角δFFを演算するものである。フィードフォワード制御器12−2は、自動操舵系において開ループ系を構成しており、この開ループ系は船首方位を直ちに参照針路に一致させるように作動する。
【0025】
フィードバック制御器12−3は、自動操舵系において閉ループ系を構成しており、船首方位と参照針路との偏差に対してフィードバック舵角δFBを演算するものである。変針系は、基本的には軌道演算部12−1からの参照針路と、フィードフォワード制御器12−2によるフィードフォワード制御の作動により、船首方位を参照針路に遅れなく追従させるものであり、このときに、参照針路と船首方位との間に偏差誤差ERRが生じた場合に、閉ループ系が偏差誤差ERRを減らすように動作する。しかしながら、この偏差誤差ERRはわずかであるため、本発明では、この閉ループ系については特許文献1と同様の構成とする。
【0026】
以下、軌道演算部12−1における参照針路ψR算出の基本的考え方について説明する。
【0027】
1.基本設計
軌道演算部12−1の出力する参照針路ψRは、変針条件を満足する時間関数である必要がある。変針条件としては、
針路条件:所望される変針量と、旋回角速度との針路条件
制限条件:操舵機16の特性を考慮したフィードフォワード舵角と舵速度との制限条件
初期値条件:変針直前の船体運動に起因した方位の角加速度と角速度との初期値条件が挙げられる。
【0028】
参照針路の変数と、変針条件の設定値との関係を表1に示す。
【0029】
【表1】
表1において、所望される変針量Δψ0は、変針直前の針路と設定針路との変化量として与えられるものとする。角速度rRは、参照針路ψRの1階微分値を、舵角δFFはフィードフォワード舵角を、舵速度δ'FFは、舵角δFFの1階微分値をそれぞれ示す。r0は指定旋回角速度、δ0は許容舵角、δ0’は許容舵速度である。参照針路ψRは、変針量ΔψRがΔψ0に一致するように、そして、他の変数rR、δFF、δ'FFの絶対値の最大値は、各々、指定旋回角速度、許容舵角、許容舵速度以下になるようにする。
【0030】
図2は、参照針路ψRとフィードフォワード舵角δFFの時間変化(但し安定船の場合)を示す。簡略化のため、変針の開始時間はゼロとし、船体運動の初期値はゼロとする。参照針路ψRは、特許文献1と同様に、加速モード、等速モード、減速モードの3モードより構成する。tは時間、Ta、Tv、Tdは、それぞれ加速時間、等速時間、減速時間を表す。以下、添字(・)a、(・)v、(・)dはそれぞれ加速、等速、減速モードを意味する。変針系は3つのモードに加えて減速モードの後に静定モードを持つことができるが、静定モードでは変針量が一定であるために説明を省略する。
【0031】
参照針路は、野本の1次モデルを用いると、2階微分可能な時間関数の条件を持つ。参照針路の2階微分値はモード間の連続性を保証するためモードの終端と次のモードの開始とでゼロになる必要がある。この要件を満たす最小次元の関数は2次関数であるから、2階微分の参照針路は2次関数を用いる。
【0032】
1.2 参照針路の時間関数
以下、各モードにおける参照針路について説明する(図3)。
1.2.1 加速モード
参照針路の2階微分が2次関数となり、初期値に角加速度C1aと角速度C2aを持つ。加速モードは、加速モード終了時に角加速度をゼロにする。
【0033】
加速モードの参照針路の2階微分、1階微分、参照針路は、以下のように表される。
【0034】
【数4】
【0035】
【数5】
【0036】
【数6】
【0037】
ここで、ψRaは加速モードの参照針路を、βaは加速定数をそれぞれ表す。時間範囲は、[0≦t≦Ta]である。時間Taで角加速度はゼロとなるので、ψ"Ra(Ta)=0より
【0038】
【数7】
となる。
【0039】
角加速度と角速度の初期値であるC1aとC2aは、t=0のときの角加速度、角速度の値
【0040】
【数8】
【0041】
1.2.2 等速モード
加速モードに続く等速モードでは参照針路の角速度は一定であり、角加速度はゼロである。従って、等速モードにおける参照針路の2階微分、1階微分、参照針路は、以下のように表される。
【0042】
【数9】
【0043】
【数10】
【0044】
【数11】
【0045】
ここで、ψRvは等速モードの参照針路を、rRは角速度をそれぞれ表す。時間範囲は、[Ta≦t≦Ta+Tv]である。C3Vは初期値である。等速モードと加速モードとの連続性の関係ψ’Rv(Ta)=ψ'Ra(Ta)とψRv(Ta)=ψRa(Ta)とから、
【0046】
【数12】
【0047】
【数13】
を得る。
【0048】
1.2.3 減速モード
参照針路はモードの終了時(終端時)にて変針量に一致し、その角速度と角加速度はモードの終了時点にてゼロになるように減衰される。したがって、減速モードの参照針路の2階微分、1階微分、参照針路は、以下のように表される。
【0049】
【数14】
【0050】
【数15】
【0051】
【数16】
【0052】
ここで、ψRdは減速モードの参照針路を、βdは減速定数をそれぞれ表す。時間範囲は、[Ta+Tv≦t≦Ta+Tv+Td]である。C2d、C3dは初期値である。減速モードと等速モードとの連続性の関係ψ'Rd(Ta+Tv)=ψ'Rv(Ta+Tv)とψRd(Ta+Tv)=ψRv(Ta+Tv)とから、
【0053】
【数17】
【0054】
【数18】
を得る。さらに、終端時間t=Ta+Tv+Tdで角速度ψ'Rv(t)をゼロにするために、
【0055】
【数19】
を得る。
【0056】
1.3 舵角と舵速度との最大値
フィードフォワード制御器12−2では、参照針路ψRからフィードフォワード舵角δFFを出力する。舵角δFFは、参照針路ψRを入力した船体モデルPの逆数とする。ここで、船体モデルPは、(1式)を使用することとすると、フィードフォワード舵角δFFは次から求まる。
【0057】
【数20】
【0058】
ここで、KsnとTsnは船体モデルのノミナル値で旋回力ゲイン、時定数を表す。Ksn>0、Tsn>0は安定船、、Ksn<0、Tsn<0は不安定船と定める。舵角δFFは参照針路の2階微分が2次関数であるから加速と減速とのモードで極値を持つ。舵角δFFと舵速度δ'FFとは、加速と減速の各モードの参照針路の(5式)及び(15式)を(19式)に代入すると、
【0059】
【数21】
【0060】
【数22】
になる。ここで、a3、a2、a1、a0はそれぞれ加速モード(添字(・)a)と減速モード(添字(・)d)に対して、
【0061】
【数23】
【0062】
【数24】
になる。尚、時間tは、加速モードで[0≦t≦Ta]、減速モードで[0≦t≦Td]とする。
【0063】
1.3.1 最大舵角
舵角の最大値または最小値は舵速度をゼロにする極値で生じるから(21式)よりその時間は、
【0064】
【数25】
で与えられる。ここで、分子の±の極性は+が安定船に、−が不安定船に対応する。舵角の最大値または最小値は時間tδFFを(20式)に代入することで求まる。最大舵角δR(以降、これを舵角と呼ぶ)は舵角δFFの絶対値の最大値
【0065】
【数26】
で定める。
【0066】
1.3.2 最大舵速度
舵速度の導関数は1次関数となり、図2に示したように、舵速度の最大値または最小値は加速と減速とのモードのそれぞれの開始または終端の時間で生じる。舵速度は、加速モードで初期値C1aのため開始と終端とで異なり、減速モードでは開始と終端とで同一となる。舵速度の最大値と最小値は(21式)〜(23式)から
【0067】
【数27】
【0068】
【数28】
になる。最大舵速度(以降これを舵速度と呼ぶ)δ'Rは舵速度δ'FFの絶対値の最大値
【0069】
【数29】
で定める。
【0070】
2.初期値をゼロとした最適設計
以上の関係式に基づき、変針条件を満足する参照針路を求める。そのために、まずは船体運動の初期値である角加速度C1aと角速度C2aはゼロとして設計パラメータを定めて諸変数の関係式を求める。簡単化のため変針量Δψ0は正とする。これにより加速と減速とのモードで時間Ta=Td、定数−βa=βd、変針量Δψa=Δψdになる。
【0071】
従って、加速時間Ta、加速定数βa及び角速度rR(=Taβa/6)を決定すれば参照針路を求めることができる。これらを求めるための設計パラメータとして、舵速度と、等速時間Tvと減速時間Tdとの比率である等減速比とする。等減速比は評価関数を導入して固定値とする。さらに、初期値をゼロとした場合の最大舵速度と変針量との関係を求め、該最大舵速度を変針量に応じた変数とする。
【0072】
2.1 参照針路の関係式
等速時間Tvと減速時間Tdとの比率を等減速比Rvdとする。即ち、
【0073】
【数30】
とする。尚ここで、減速時間Tdを用いている理由は、減速モードが初期値C1a、C2aに無関係であるからである。加速時間Taと加速定数βaと、舵速度δ'Rとの関係は、(26式)を用いて、
【0074】
【数31】
となる。ここで、CR≡δR’Ksn/Tsnを舵定数と呼ぶ。変針量ΔψRと変針時間Ttとは、(5式)、(11式)等から
【0075】
【数32】
【0076】
【数33】
になる。
【0077】
2.2 舵角の関係式
舵角は(19式)で示され、参照針路の1階微分と2階微分の和であるから、舵角の極値は2階微分の極値を1階微分の影響分だけずらした位置にある。
【0078】
加速モードの終端時間または減速モードの開始時間で参照針路の2階微分はゼロになるから、舵角の成分はその1階微分値、即ち角速度rR(条件ΔψR>0よりrR>0)になる。即ち、安定船では、
【0079】
【数34】
となり、不安定船では、
【0080】
【数35】
【0081】
となる。舵角の極性は安定船(Ksn>0)で正に、不安定船(Ksn<0)で負になる。よって、舵角の絶対値の最大値は1階微分値の影響により安定船では角速度成分を加算する加速モードで最大舵角として生じ、不安定船では角速度成分を減算する減速モードで最小舵角として生じる。以下、安定船と不安定船のそれぞれの舵角の最大値を求める。
【0082】
2.2.1 安定船の場合
極値をとる時間を(24式)より求める。Tsn>TaとしてTaylor展開の2次までを用いると、
【0083】
【数36】
【0084】
【数37】
になるから、極値の時間は、
【0085】
【数38】
になる。上記式の括弧内の第1項は参照針路の2階微分の極値時間に相当し、第2項は参照針路の1階微分の極値時間に相当する。よって、舵角の最大値は(37式)を(20式)に代入して、
【0086】
【数39】
になる。ここで、Tsn>Taの関係により2乗項と4乗項とを省く。こうして、舵角の最大値と加速時間Ta、加速定数βaとの関係を(38式)で示すような簡単な式で表すことができるようになる。
【0087】
2.2.2 不安定船の場合
減速モードで最小舵角を生じるのを除き、安定船の場合と同様で、極値の時間は
【0088】
【数40】
となる。舵角の最小値は、
【0089】
【数41】
になる。
【0090】
2.2.3 最大舵角のまとめ
(38式)と(40式)とをまとめると、最大舵角は
【0091】
【数42】
になる。安定船と不安定船の船体パラメータの絶対値が同じであれば、最大舵角は同じになり、参照針路の1階微分はTa/TsnまたはTd/Tsnで影響する、という特性が得られる。
【0092】
2.3 等減速比の設計
設計パラメータの等減速比は、評価関数を用いて決定する。まず、(31式)等から変針量ΔψRより等速時間Tv=6ΔψR/(βaTa)−Taを得るので、変針時間Ttは、
【0093】
【数43】
になる。ここで、Td=Ta、βa=−βdの条件を用いている。
【0094】
変針時間Ttを最小にする加速時間Taを求めると、
【0095】
【数44】
を得る。このとき、等速時間Tvは0となる。舵速度が一定の条件下で加速時間が最大になると角速度rRが最大になるので、変針時間を短くすれば角速度rRを大きくすることになる。変針動作の運動エネルギーは角速度の2乗に比例すると想定すると、単に変針時間を短くすることにのみ着目することは省エネルギーの観点から得策ではない。よって、変針時間を許容範囲内に設定して角速度を低くするために、変針時間と角速度とを用いた評価関数を導入し、それを最小にする等減速比を求めることにする。
【0096】
(31式)及び(38式)からβaを消去してTaの2次方程式をつくり、その解を求めると、
【0097】
【数45】
を得る。但し、
【0098】
【数46】
を仮定した。
【0099】
同様にβaを求め、変針時間Ttと角速度rRとを求めると、
【0100】
【数47】
【0101】
【数48】
になる。(46式)及び(47式)において等減速比以外の変数は設定値であるから、変針時間Ttと角速度rRは等減速比Rvdの関数となる。
【0102】
さらに、(46式)と(47式)から、等速時間をゼロ(Rvd=0)とした変針時間とその角速度とに対する等速時間比と角速度比とを以下で定義して評価量とする。評価量は(46式)と(47式)から係数が取り除かれた形となる。
【0103】
【数49】
【0104】
【数50】
【0105】
評価関数Jは、各評価量の2乗和とすると、
【0106】
【数51】
になり、この評価関数Jを最小にする等減速比Rvdの値を求める。ここで、λは正の重みを示す。評価関数JをRvdで微分しそれをゼロとおくと、
【0107】
【数52】
になる。
【0108】
様々な重みλに対して、(51式)を満足する等減速比Rvd(>0)とそのときの評価関数Jの特性を調べると、表2のようになる。
【0109】
【表2】
重みλが増加すれば評価関数は増加するが、変針時間の増加に対して、運動エネルギーの抑制効果が十分に期待できる範囲としては、2≦λ≦3の範囲、より好ましくは、λ=2.36とするとよいことが分かる。即ち、2≦Rvd≦2.61、より好ましくは、Rvd=2.23とするとよく、この等減速比Rvdを基本的に固定に設定する。
【0110】
2.4 舵速度の決定
次に、舵速度を決定する。舵速度δ'Rは、(30式)を変形すると
【0111】
【数53】
となる。(52式)を(38式)、(40式)に代入すると、βaの2次方程式ができ、この解を求めると、
【0112】
【数54】
【0113】
【数55】
として求まる。定数βaが求まると、定数Taも(52式)から求めることができる。
【0114】
安定船と不安定船の定数の差異はβaとβdの計算だけなので、以下安定船を想定する。不安定船のときは便宜的にβa=βdとすればよい。(30式)と(31式)とから
【0115】
【数56】
となる。
【0116】
(53式)、(54式)のβa、βd、またはTaを(55式)に代入して消去すると、変針量ΔψRと舵角δR及び舵速度δ'Rとの関係式が得られる。即ち、
【0117】
【数57】
となる。
【0118】
変針時間Ttを最短とする舵角δRの条件は、(46式)よりその上限である許容値を用いることである。
【0119】
ΔψRの範囲は、舵速度δ'Rの可変範囲で設定することができるので、δ'Rの範囲を例えば、
【0120】
【数58】
と定める。舵速度δ'Rと変針量ΔψRとの関係を図4に示す。
【0121】
変針量ΔψRLはδ'Rの上限値δ'RHを用いた値で、変針量ΔψRHはδ'Rの下限値δ'RLを用いた値である。変針量|ΔψR|は、ΔψRL、ΔψRHにより3つの変針領域Small、Middle、Largeに分けられる。Middleは舵速度が変化する領域で、SmallとLargeは、舵速度がそれぞれ上限値δ'RHと下限値δ'RLとで一定の領域とする。
【0122】
変針量ΔψRL、ΔψRHは、(56式)等を用いて、δ'R=δ'RHのときのΔψをΔψRL、δ'R=δ'RLのときのΔψをΔψRHとして求めることができる。即ち、
【0123】
【数59】
になる。
【0124】
また、Middleの舵速度は、(53式)または(54式)を(56式)に代入してδ'R1/3の二次方程式を解くと、
【0125】
【数60】
を得る。ここで−が安定船の場合に+が不安定船に対応し、
【0126】
【数61】
であり、変針量ΔψRから対応する舵速度δ'Rを求めることができる。
【0127】
この結果、変針量の該当する変針領域は決定され、その領域から使用する最大舵速度δ'Rを決定する。
【0128】
2.5 指定旋回角速度
角速度rRは、(11式)または(31式)より、Taとβaを消去すると、
【0129】
【数62】
で求まる。
【0130】
この求められた角速度rRを用いて、最大舵角δRを(41)式を用いて求め、最大舵角δRと許容舵角δ0(表1参照)とを比較し、最大舵角δRが許容舵角δ0よりも大きい場合には、許容舵角δR=δ0を満足するようなrRを求め、さらに求めたrRと指定旋回角速度r0(表1参照)との大小関係を調べる。そして、求められた角速度rRが指定旋回角速度r0以上の場合に、rR=sign(ψR)r0としてこれを基準角速度とする。角速度r0以下の場合にはrRをそのまま基準角速度とするとする。前者の場合、角速度が変わるために、等減速比Rvd=2.23の条件を満足しない。そのため、等速時間を調節することで変針条件を満足させる。等速モードの変針量ΔψRvと等速時間Tvは
【0131】
【数63】
【0132】
【数64】
になる。
【0133】
3.初期値を考慮した設計
次に、船体運動の初期値C1aとC2aを考慮した場合について説明する。初期値は加速モードにのみ組み込まれる。1回の加速モードの終端で角加速度の初期値C1aはゼロになるが、角速度の初期値C2aは参照針路の基準角速度rRに収束できない場合がある。1回の加速モードで対応できる初期値C2aの大きさは舵角制限により限定されるからである。そこで、加速モードを複数回組み合わせることによって、初期値の大きさの影響を排除する。
【0134】
初期値をゼロにして求めた基準角速度rRを用い、加速モードの終端で角速度がrRになるように、且つ、舵速度がC1a、C2aをゼロとして変針量から決定した舵速度δ'Rを超えることのないように加速時間Taと加速定数βaを設定する。しかしながら、初期値C2aとrRの大小関係及び初期値C1aの正負関係の組み合わせによっては、上記基準角速度rRを用いることが適当でない場合が生じる。この場合に、基準角速度rRを修正する。
【0135】
3.1 初期値の組み込み
まず、舵角制限を無視して初期値を含んだ加速モードの定数を求めることにする。舵速度は初期値C1aにより開始または終端において異なる。両者の絶対値で大きい方を舵速度δ'Rに設定する。
【0136】
加速時間Taと加速定数βaとを(26式)及び(30式)の舵速度を用いて関係づけると、
【0137】
【数65】
を得る。ここで、CRaは加速モードの舵定数を、flgaは極性定数をそれぞれ示し、t=0、t=Taは最大舵速度の発生時刻でそれぞれ開始と終端とを示す。
【0138】
初期値を含んだ加速モードの関係式は、(11式)の左辺の角速度rRに初期値をゼロにして求めた基準角速度を置けば得られる。(64式)のβaを(11式)に代入するとTaに関する2次方程式
【0139】
【数66】
を得る。CRa≠0から加速時間は、
【0140】
【数67】
になり、βaは(64式)から求まる。
【0141】
3.1.1 最大舵速度の発生時刻の決定
初期値に対応して最大舵速度の発生時刻が決まれば、Taは(66式)から、βaは(64式)から求まる。C2a=rRの場合とC2a≠rRの場合に分けて最大舵速度の発生時刻を求める。
【0142】
C2a=rRの場合には、C1a>0ならばβa<0になり、参照針路の角加速度ψ"Raは下向きに凸となり、C1a<0ならばβa>0になり、参照針路の角加速度ψ"Raは上向きに凸となる。このため、最大舵速度は開始時に生じる。
【0143】
C2a≠rRの場合、さらに両者の大小関係の差が大きい場合と小さい場合とに分ける。この場合分けは、(66式)において差が大きい場合は(C2a−rR)成分が、差が小さい場合はC1a成分がそれぞれ支配的な状態であることに相当する。
【0144】
まず、差が大きい場合について検討する。C2a≫rRならば、βa<0になり参照針路の角加速度ψ"Raは下向きに凸となり、最大舵速度はC1a≧0ならば開始時に、C1a<0ならば終端時に生じる。同様に、C2a≪rRならば、βa>0になり参照針路の角加速度ψ"Raは上向きに凸となり、最大舵速度はC1a>0ならば終端時に、C1a≦0ならば開始時に生じる。表3にまとめる。
【0145】
【表3】
ところが、C2aとrRの差が小さい場合、特に、C2a>rRでC1a<0及びC2a<rRでC1a>0の場合は、上記表3とは異なり、以下で説明するように、最大舵速度の発生時刻が終端時ではなく開始時に起こり、最大舵速度の発生時刻が異なり、C2aとrRの大小関係で発生時刻を一義的に決定することができなくなる。そのため、それらの場合には角速度rRに修正量を加えて差が大きい場合に変更することで、その条件から回避する必要がある。
【0146】
3.1.2 角速度修正量について
C2a>rRでC1a<0の場合及びC2a<rRでC1a>0の場合について、終端時t=Taについて調べる。|C2a−rR|>0で両者の差が小さいとき、(66式)のt=Taは、
【0147】
【数68】
となり、加速時間Taは差に比例して微小になる。ここで、Δr=−6(C2a−rR)とおく。但し、C1a<0のときに√の係数を−にしている。このとき、(64式)のβaはTa成分よりもC1a成分が支配的になる。即ち、
【0148】
【数69】
になる。ここで、ε=CRaTaとしている。上式を(3式)に代入し、(6式)を用いる
と、
【0149】
【数70】
になり、(69式)を微分すると
【0150】
【数71】
になる。
【0151】
舵速度は、(19式)より
【0152】
【数72】
で与えられる。開始及び終端時刻でのψ"Ra、ψ"' Ra、は、
【0153】
【数73】
になるから、舵速度の大小関係は絶対値をとって開始及び終端時刻とで比較をすると(|a+b|≦|a|+|b|)、
【0154】
【数74】
になる。但し、ここで、Ta/Tsn<2とする。よって、C2a−rRの差が小さいときには、最大舵速度はt=Taではなく、t=0で生じて、表3と矛盾が生じることが分かる。
【0155】
そこで、t=0での舵速度をt=Taと同じにする条件を求める。その場合、時刻t=0とTaとで、ψ"'Ra(t)は同じになる。差が小さいときのψ" Ra(t)の係数αaは、αa=C1a−ε、差が大きいときのψ"Ra(t)の係数αaは、αa=−CRaTa+C1aとなり、極性が逆になっている。つまり、差の大きさによりαaがゼロになる場合を生じることになる。αaがゼロのとき、つまり、βa=−C1aのとき、ψ"'Raは時間に無関係になるので、舵速度への関与は一定となる。即ち、
【0156】
【数75】
となり、舵速度に比例するψ"'Ra+(1/Tsn)ψ" Raは、
【0157】
【数76】
となる。βaによるψ"Raの様子を図5に示す(但し、C2a<rRでC1a>0の場合)。
【0158】
βa=−C1aとなるときの舵速度の大小関係を調べると、
【0159】
【数77】
になり、(73式)に比べ差の大きさは小さくなる。しかし、最大舵速度の時刻はTsn項の影響を受けるため、安定船の場合、t=Taで最大となり、C2a>rRでC1a<0、及びC2a<rRでC1a>0の場合の条件を満足するが、不安定船の場合には、t=0で最大となり、条件を満足できない。以下各々の場合を説明する。
【0160】
3.1.2.1 安定船の場合
安定船の場合、(76式)においてTsn項により舵速度はt=Taで最大となる。
(i) C2a>rRでC1a<0の場合
βa≦−C1aになるように設定すればよいので、この不等式を(64式)を用いて変形すると、
βa=CRaTa−2C1a≦−C1a
CRaTa≦C1a
となる。
【0161】
C2a>rRでC1a<0でありCRa<0であるから、
Ta≧C1a/CRaであり、(66式)から
【0162】
【数78】
となる。2乗して極性に注意して整理すると、
【0163】
【数79】
【0164】
【数79a】
となる。
【0165】
(ii) C2a<rRでC1a>0の場合
βa≧−C1aになるように設定すればよい。同様にこの不等式を変形すると、
βa=CRaTa−2C1a≧−C1a
CRaTa≧C1a
となり、
C2a<rRでC1a>0でありCRa>0であるから、
Ta≧C1a/CRaであり、
【0166】
【数80】
となる。2乗して極性に注意して整理すると、
【0167】
【数81】
【0168】
【数81a】
となる。
【0169】
3.1.2.2 不安定船の場合
不安定船の場合、(76式)においてTsn<0より舵速度の最大値はt=Taでなくt=0で生じるので、t=0での舵速度をt=Taでの舵速度以下に設定すればよい。
(i) C2a>rRでC1a<0の場合
(26式)、(64式)から
【0170】
【数82】
が得られる。さらに、
【0171】
【数83】
を得る。これを、(64式)のt=Taのβaに代入すると、
【0172】
【数84】
になる。ここで、
【0173】
【数85】
である。(83式)及び(84式)からTaを取り出して、それを(66式)に代入すると、
【0174】
【数86】
となる。さらにこれを極性に注意して整理すると、
【0175】
【数87】
【0176】
【数88】
として求まる。
【0177】
(ii) C2a<rRでC1a>0の場合
(i)と同様に(26式)、(64式)から
【0178】
【数89】
が得られる。そして、同様の計算を行なうと、
【0179】
【数90】
【0180】
【数91】
を得る。
【0181】
3.1.2.3 角速度修正量のまとめ
(78式)、(80式)、(86式)、(89式)においてrCは角速度修正量を示し、CRaの極性と逆である。この結果、これら式を満足するときに最大舵速度は終端時間で生じ、その設定値になるが、満足しないとき角速度rRを修正量rCと初期値C2aを用いて
【0182】
【数92】
に置き換えることによって、安定船不安定船の双方で時刻t=0とt=Taの舵速度の大きさは等しく、その最大舵速度とすることができる。
【0183】
以上の関係をまとめると次の表になる。
【0184】
【表4】
【0185】
3.2 初期値を含んだ舵角の導出
最大舵角は初期値による増加分でその許容値を超える場合を生じる。そのため初期値を含んだ舵角の式を求める。(35式)、(36式)に(64式)を代入して、初期値C1aの1次項までで近似すると、
【0186】
【数93】
になる。(92式)は安定船不安定船の双方に対応する。舵角の極値である最大舵角はβaに依存するため、最大舵速度の発生時間毎に求める。
【0187】
3.2.1 最大舵速度が開始時間で生じる場合
舵角と加速時間との関係式は、極値時間tpを(64式)のt=0のβaと舵角の式である(20式)に代入してC1aの1次項までで近似すると、
【0188】
【数94】
【0189】
として得られる。(40式)ではTaの2次式を用いたが、ここでは3次式まで用いている。その理由は、C1aのTaの3次係数が2次係数と比べ十分に小さくならず省略できないためである。(93式)から舵角は加速時間Taと初期値C1a、C2aとを用いて算出できる。算出した舵角の絶対値が設定値である許容舵角を超えた場合、舵角の絶対値は加速時間を変更することによって許容舵角に一致させる。即ち、(93式)で舵角δRを設定値である許容舵角δ0に置き換えると、Taの3次方程式は、
【0190】
【数95】
になり、Taは求まる。Taよりβaが求まり、角速度rRは(11式)より求まる。
【0191】
3.2.2 最大舵速度が終端時間で生じる場合
舵角と加速時間の関係式は、極値時間tpをt=Taのβaと舵角の式である(64式)に代入してC1aの1次項までで近似すると、
【0192】
【数96】
【0193】
として得られる。同様に、算出した舵角の絶対値が許容舵角を超えた場合、舵角の絶対値は加速時間を変更することによって許容舵角に一致させる。即ち、(95式)で舵角δRを許容舵角δ0に置き換えると、Taの3次方程式は、
【0194】
【数97】
になり、Taは求まり、また、Taよりβaが求まり、角速度rRは(11式)より求まる。
【0195】
4.小角度対応
船体運動の初期値がゼロでないC1a≠0、C2a≠0において、参照針路は初期値を減衰して、変針量に一致するように構成される。このときに、変針量が小さいと、旋回角速度が小さく設定されることになる。ところが、初期値を減衰させるために必要である方位変化量が変針量よりも大きいときには、小さい旋回角速度で旋回するために、変針時間がかかってしまう、という問題がある。この状態を小角度と呼ぶ。
【0196】
この対応として、方位変化量が変針量より大きいと判断した場合、小角度対応として加速モードを減衰モードと通常モードとに分けて、減衰モードで初期値を減衰した後、次の通常モードでその間の方位変化と変針量との和を改めて変針量に置き換えて、加速モードの参照針路を求めるようにする。
【0197】
減衰モードを発生させるか否かの判定の具体的な計算は、まず、初期値に起因した方位変化量ψiniを求める。初期値に起因した方位変化量ψiniは、加速時間Taと加速定数βaとを求めると、(5式)、(6式)から
【0198】
【数98】
で得られる。次いで、この方位変化量ψiniと変針量とを比較して、小角度対応するかどうかを決定する。
【0199】
5.船体モデルの修正
以上の説明においては、フィードフォワード制御器12−2の伝達関数を、船体プラントの伝達関数P(s)の逆特性を有すると仮定して、具体的には、特許文献1で示すものと同じ(式1)を用いて解析している。
【0200】
しかしながら、特許文献1の(式1)の野本の1次モデルを用いた船舶用自動操舵装置では、実船において変針後にオーバシュートを生じる場合がある。オーバシュートの原因は、実際の船体特性と制御系の船体モデルとの差異が無視できないことに起因すると考えられる。従って、適切な船体モデルを特定する必要がある。
【0201】
図6は、参照針路及び参照針路の1階微分の変針応答の時間変化を表しており、参照針路ψRに対する船首方位ψの偏差誤差は、変針状態において無視できる程小さく、静定状態の開始時において偏差誤差はほぼゼロで、その後、オーバシュートを生じ、再びゼロに収斂している。参照角速度dψR/dtに対する旋回角速度dψ/dtの偏差誤差は、変針状態の終端時において加速モードで一致し、等速モードで誤差を生じ、減速モードでゼロに戻らず誤差を持ち、静定状態において開始時の誤差(初期値)がゼロに収斂する。よって、静定状態の方位のオーバシュート発生は、角速度初期値に起因していることと考えられる。
【0202】
まず、モデルとして野本の1次モデルと2次モデルとを考える。
野本の2次モデルは、
【0203】
【数99】
【0204】
として表される。ここで、δcは命令舵角を、Ks、Ts1、Ts2、Ts3は船体パラメータで旋回力ゲイン、3つの時定数を示す。船体パラメータの極性はTs2>0、Ts3>0で、安定船ではKs>0、Ts1>0、不安定性ではKs<0、Ts1<0である。時定数の大小関係は、|Ts1|>Ts3>Ts2となる。野本の1次モデルと2次モデルのそれぞれのブロック図を図7(a)、(b)にそれぞれ示す。同図でψ(0)、ψ’(0)、ψ'1(0)、ψ'2(0)は初期値を、r=dψ/dtを示す。
【0205】
静定状態は、フィードバック制御器12−3による閉ループ応答になる。
【0206】
【数100】
【0207】
ここで、KP、KDはフィードバックゲインでそれぞれ比例ゲインと微分ゲインを示す。静定状態の初期条件は、
【0208】
【数101】
と定める。ここで、ψR0は参照針路の変針量を示す。
【0209】
(99式)を(98式)に代入すると、
【0210】
【数102】
になる。但し、ψ'10=ψ'1(0)、ψ'20=ψ'2(0)としている。上式に静定状態の初期条件を当てはめると、
【0211】
【数103】
となる。ここで、特性多項式を実数a、減衰係数ζ及び固有周波数ωnで因数分解することができると仮定している。
【0212】
静定状態の応答は、上式から第1項が一定値になり、第2項が時定数Ts1とTs2の1次遅れ要素によるそれぞれψ'10、ψ'20との初期値応答になる。両者の初期値応答の差異は、分母の特性多項式が共通であるから、分子の係数及び初期値の大きさにより決定される。差異を調べるために、次式
【0213】
【数104】
を定める。ここで、Tcは時定数、Gはゲインを示す。上記の時間解は0<ζ<1とおく
と、
【0214】
【数105】
になる。ここで、
【0215】
【数106】
を示す。(104式)より、応答の振幅およびピーク値はGの大きさに比例し、ピーク時間はsin項のみの場合に比べcos項の係数Aに比例して早まる。(101式)の特性方程式
【0216】
【数107】
から、実数aの近似解は時定数の大小関係|Ts1|>Ts3>Ts2より|Ts1|≫Ts2を用いると、
【0217】
【数108】
になる。また、A,Bの分母は、a2−2ζωna+ωn2=(a−ζωn)2+ωn2(1−ζ2)>0となる。ψ'10、ψ'20との初期値応答は、(104式)の特性により次のようになる。
【0218】
・初期値ψ'10の場合
Tc=Ts2、G=ψ'10よりA≒0、B≒1に近似できる。応答は(104式)において、sin項が支配的になり、1次モデルの場合とほぼ同じになる。これにより、ψ'10≒ψ'0となる。
・初期値ψ'20の場合
Tc=Ts3、G=ψ'20Ts3/Ts1よりA>0、B<1になる。応答は初期値ψ'10の場合に比べて、ピーク値がψ'20≒ψ'10を仮定して、
【0219】
【数109】
になるため減少し、ピーク時間が早まる。
【0220】
これにより、静定状態の初期値応答は時定数Ts2に起因したものより時定数Ts1に起因したものが支配的になる。よって、初期値ψ'20に対応する時定数Ts2の1・BR>汳Xれ要素は2次モデルの分母から省略することができる。一方で、2次モデルの分子の時定数Ts3はオーバシュートの発生抑制のために存在する必要がある。
【0221】
そこで、本発明では、船体モデルとして図8に示すように、
【0222】
【数110】
を採用し、フィードフォワード制御器12−2の伝達関数は、その逆数の特性となるように、
【0223】
【数111】
と設定し、時定数Ts3を更なる船体パラメータとする。
【0224】
しかしながら、軌道演算部12−1の構成は変更せずに、前項1〜4で説明してきたように、1次モデルを用いて演算を行なう。なぜならば、設定された最大舵角及び最大舵速度は、時定数Ts3の存在によるローパスフィルタ効果で抑制されるため、操舵機への要求が低減される方向になるからであり、また、船体運動の初期値に対する変化はないからである。
【0225】
6.軌道演算部の処理
軌道演算部12−1で行なわれる処理について図9ないし図11のフローチャートに基づき説明する。
【0226】
ステップS10:まず、変針条件が入力される。変針条件は、所望される変針量Δψ0、指定旋回角速度r0、船体運動の初期値C1a、C2a、船体パラメータのノミナル値Tsn、Ksn、許容舵角δ0、舵速度の上限値δ'RH、下限値δ'RLなどがある。
【0227】
船体運動の初期値C1a、C2aは、変針開始時に変針中であったときの前回の変針に対して軌道演算部で演算を行った参照針路の2階微分と1階微分との変針開始時の値から求めることとする。即ち、前回の変針時における時間t'で次の変針の設定があったときに、初期値は、前回の変針時の参照針路の2階微分ψ"R(t')=C1aと1階微分ψ'R(t')=C2aとする。これにより、ノイズの影響を受けない初期値を得ることができる。
【0228】
ステップS12:次いで、変数の設定を行なう。舵速度の制限値δ'RH、δ'RLに対する図4に示す変針領域の設定を行う。このときには、ΔψRL、ΔψRHは(56式)(58式)から求めることができる。
【0229】
ステップS14:次いで、船体運動の初期値を減衰させる、即ち小角度対応を行なうか否かを判定する。具体的には、方位変化量ψiniと変針量Δψ0の比較を行なう。(97式)から方位変化量を求める。尚、(97式)における加速時間Taと加速定数βaは、rR=0、δ'Rは制限値(上限値または下限値)として(66式)及び(64式)から求められたものを用いる。
【0230】
ステップS20:減衰モードを実行せずに通常モードのみを行なう場合、以下で説明する参照針路の計算を行なう。
【0231】
ステップS40:減衰モードを実行する場合には、以下で説明する初期値の減衰と変針量の計算を行なう。ステップS40の後、ステップS20の参照針路の計算を行なう。
【0232】
次に、加速モードの通常モードの場合の参照針路の計算は、図10に示すフローチャートに基づき行ない、所望される変針量、設定の角速度及び初期値とから参照針路を求める。
【0233】
ステップS22:変針量Δψ0、角速度r0及び船体運動の初期値C1a、C2aの入力を行なう。そのため、ノイズの影響を受けない初期値を得ることができる。
【0234】
ステップS24:初期値C1a、C2aを用いずに、変針量ΔψRに対する舵速度δ'Rと角速度rRを求める。
【0235】
即ち、与えられた変針量ΔψRに対してステップS12で設定された図4の変速領域のいずれの領域に属するかを判定し、該当する舵速度δ'Rを求める。また、旋回角速度を(61式)を用いて求める。旋回角速度が指定旋回角速度r0を超えるときには角速度rR=sign(ψR)r0とする。
【0236】
ステップS26:加速、等速、減速の各モードの計算を行なう。各モードの定数を求める。加速モードについては、最大舵角を許容舵角以下にする条件で初期値を減衰させ、且つ終端時の旋回角速度を基準角速度rRに一致させるように設定する。但し、基準角速度rRについては、表4に示した条件を判定し、C2a>rRでC1a<0の場合、及びC2a<rRでC1a>0の場合には(91式)の修正を行う。
【0237】
また、加速時間Taと加速定数βaは、(66式)及び(64式)から求められたものを用いるが、(93式)または(95式)で求めた舵角δRが設定値である許容舵角を超えてしまう場合には、(94式)または(96式)よりTaを求め、(64式)から加速定数βaを、(11式)から角速度rRを求める。
【0238】
変針量ΔψRと各モードの変針量の総和との誤差は等速時間を修正することで、打ち消す。即ち等速時間は、
【0239】
【数112】
【0240】
【数113】
【0241】
になる。ここで、Δψ0、ΔψRa、ΔψRv、ΔψRdは変針量でそれぞれ設定値、加速、等速、減速のモードの変針量を表し、(・)*は修正値を、Tvは等速時間を、rRは角速度を表す。
【0242】
ステップS28:等速時間が負でなく、角速度が基準角速度(ステップS24で求めた角速度)になったかどうかを判定する。判定は等速時間がゼロ以上であり、且つ角速度と基準角速度との絶対値の誤差が収束値ε以下のときに次のステップに進み、そうでないときに繰り返しループに戻る。
【0243】
ステップS30:ステップS28で判定がnoである場合、累積変針量と初期値との更新を行なう。加速モードによる方位変化を変針量に加えて、加速モードの終了時の角速度を角速度の初期値に置き換える。即ち、
【0244】
【数114】
【0245】
【数115】
【0246】
【数116】
になる。ここで、Δψ*0は修正変針量を、ΣΔψRaは加速モードの累積値をそれぞれ示す。
【0247】
次に、減衰モードは、図11に示すフローチャートに基づき行ない、変針量を考慮しないで舵速度を制限値として初期値の絶対値をゼロに漸近させ、その過程で生じた方位変化を蓄積する。
【0248】
ステップS42:船体運動の初期値の入力と基準角速度ゼロの設定を行なう。
ステップS44:加速モードの角速度終端値と変針量(97式)との計算を行なう。
ステップS46:角速度終端値がゼロか否かの判定を行なう。判定は、終端値の絶対値が収束値ε以下のときに次のステップに進み、そうでないときに繰り返しループに戻る。
ステップS48:ステップ30と同様の処理を行なう。
【0249】
以上のようにして演算された参照針路は、順次、フィードフォワード制御器12−2に出力されて、そこで、フィードフォワード舵角δFFが演算されて、フィードバック制御器12−3からのフィードバック舵角δFBが加算器12−5で加算された後、操舵機16へと出力される。参照針路は、Ksn、Tsnを基準に計算しているが、船体モデルは(109式)Ts3nを含むために、フィードフォワード制御器12−2における演算にあたっては、(110式)で示すように、参照針路はTs3nの1次遅れ系を通過させた時間関数解とする。これによって、変針時のオーバシュートを防止する。
【0250】
図12及び図13は、様々な条件におけるシミュレーション結果を示している。図12は、不安定船の大角度変針時を表しており、Δψ0=−15deg、C1a=0.01deg/s2、C2a=0.3deg/sの条件で、1回の加速モードでは基準旋回角速度に収束できないために2回の加速モードを組み合わせている例である。図13(A)は安定船の小角度変針時を表しており、Δψ0=0deg、C1a=0deg/s2、C2a=0.9deg/sの条件で、2回の減衰モードで初期値を減衰させた後、1回の通常モードで基準角速度に収束させている例である。図13(B)は不安定船の小角度変針時を表しており、Δψ0=0deg、C1a=0deg/s2、C2a=−0.8deg/sの条件で、7回の減衰モードで初期値を減衰させた後、1回の通常モードで基準角速度に収束させている例である。
【0251】
7.等減速比の変形例
以上の説明では、等減速比を前掲2.3章で説明したように固定値で設計し、これによって、加速・等速・減速の釣合を重視している。しかしながら、この設計では、大きな変針でないと、角速度rRを指定旋回角速度r0に一致させることができない。
【0252】
そこで、等減速比を固定から可変とした変形例に基づく軌道演算部12−1を図14に示す。軌道演算部12−1は、等減速比演算部12−1−1と、参照針路演算部12−1−2とから構成し、参照針路演算部12−1−2は、図1の軌道演算部12−1と同じ作用を果たすものとする。等減速比演算部12−1−1では、変針開始時点の旋回角加速度の初期値C1aと旋回角速度の初期値C2aをゼロとして旋回角速度rRを求め、その際に、旋回角速度rRが指定旋回角速度r0に等しいと仮定したときに、舵角δRが許容舵角δ0以下の条件を満足するときに、旋回角速度rRを指定旋回角速度r0に決定し、該条件を満足しないときに、舵角δRと許容舵角δ0との偏差を最も小さくする角速度を旋回角速度rRに決定し、それを新たな指定旋回角速度とする。そして、その決定された指定旋回角速度における最大舵速度δR’を舵速度上限値とする。
【0253】
そして、舵角δRが許容舵角δ0以下の条件を満足するかどうかを判定するときに、等減速比Rvdを変化させながら、条件を満足するかを判定する。そして等減速比Rvdを変化させても舵角条件を満足しない場合には、角速度rRを変化させて、舵角条件を満足させる角速度rRを見つける。等減速比演算部12−1−1で行う具体的処理について以下、説明する。
【0254】
7.1 準備
ここで、今までの説明に登場し、且つ以下の説明で用いる関係式を整理する。この等減速比演算部12−1−1においては初期値C1a、C2aを考慮しない関係式を使用する。
【0255】
【数117】
【0256】
【数118】
【0257】
【数119】
【0258】
【数120】
【0259】
【数121】
【0260】
【数122】
であり、Cψ、CRは、(30式)、(60式)から
【0261】
【数123】
【0262】
【数124】
である。
【0263】
7.2 最大舵角で等減速比Rvd≧0が実現できる角速度
舵速度の制限がなしとして、許容舵角δ0、等減速比Rvd≧0で実現できる指定旋回角速度r0を求める。(119式)のrRをr0に、(120式)のδRをδ0にそれぞれ置き換えると、Rvdの2次方程式
【0264】
【数125】
を得る。ここで、各係数は、以下の通りである。
【0265】
【数126】
【0266】
判別式D=b2−4ac≧0のとき、r0は実現し、D<0のとき、r0は実現しない。D<0になるときには、D=c12−1/4=0を満足するr0が実現できる角速度となる。まとめると、許容舵角の下で実現できる角速度は、
【0267】
【数127】
により決まる。
【0268】
7.3 許容舵速度で等減速比Rvd≧0が実現できる角速度
さらに、許容舵速度δ0’、最大舵角の制限なし、等減速比Rvd≧0で実現できる角速度rRを求める。δ0に対応するCRをCR0とすると、
【0269】
【数128】
になる。等減速比Rvd maxがεより小さいときには、rRは実現できないので、その場合には、角速度rRを
【0270】
【数129】
のように下げる。ここで、εは10−3程度の設定値とする。まとめると、
【0271】
【数130】
となる。
【0272】
7.4 最大舵角との比較
上記(130式)、(131式)で決めたRvd、rRとしたときに舵角の最大値が許容舵角δ0を超えていないかどうかを確認する。具体的には、(130式)、(131式)で決めたRvd、rRを用いて、(116)式、(117)式、(119)式から舵速度δR’を求め、求めた舵速度δR’を用いて、(120式)から舵角δRを求め、求めた舵角δRと許容舵角δ0との比較を行い、δR≦δ0であれば、7.7の手順に進む。δR>δ0であれば、まず、優先度の最も低いRvd>0を調整して変針条件に適合させ、次いで、優先度がRvdの次に低いrRを調整して変針条件に適合させる。そのための準備として、まず、舵角δRの等減速比Rvdに関する特性及び角速度rRに関する特性をそれぞれ調べる。
【0273】
7.4.1 舵角δRの等減速比Rvdに関する特性
(119式)を(120式)に代入して、δRのRvdに関する一次微分、二次微分を求める。すると、
【0274】
【数131】
【0275】
【数132】
となり、これにより、δRはRvdに関して下に凸関数で、極小値は、
【0276】
【数133】
のとき生じることが分かる。変針条件によってRvdmin<0になる場合が生じるが、その場合は条件Rvd>εから単調増加の関数として扱う。
【0277】
7.4.2 舵角δRの角速度rRに関する特性
同様に、(119式)を(120式)に代入して、δRのrRに関する一次微分、二次微分を求める。すると、
【0278】
【数134】
【0279】
【数135】
になる。これにより、δRはrRに関して単調増加の関数であることが分かる。
【0280】
7.5 等減速比Rvdの調整
前述のように、等減速比RvdがRvdminのときδRは最小値となり、また、δ0’になるときのRvdmaxのときにδRは最大値となる。図15は、横軸を等減速比Rvdとし、縦軸を舵速度δR’、舵角δRと変針時間Ttである。舵角δRはRvdminで最小値となり、Rvdmaxでδ0となる。従って、変針時間Ttを短くし、解を1つにするために、Rvdの探索範囲は、[Rvdmin,Rvdmax]とし、この範囲でδRとδ0との誤差を最小にするRvdを黄金分割等の任意の手法により求める。
【0281】
7.6 角速度rRの調整
7.5で得られたRvdを用いて、7.4の手順を用いて、舵角δRを求め、舵角δRが許容舵角δ0との比較を行い、δR≦δ0であれば、7.7の手順に進む。δR>δ0であれば、範囲[0,rR]で、δRとδ0との誤差を最小にする角速度rR を黄金分割等の任意の手法により求める。
【0282】
7.7
以上の手順で決定した等減速比Rvd、角速度rR、舵速度δR’を用い、角速度rR、舵速度δR’をそれぞれ変針条件の指定旋回角速度r0、舵速度の上限値δRH’とし、下限値δRL’=δRH’×0.5として、参照針路演算部12−1−2に入力する。参照針路演算部12−1−2は、前述の6.軌道演算部の処理を実行する。舵速度の上限値δRH’は、許容舵速度δ0’以下となる。
「6.軌道演算部の処理」におけるステップS24では、変針領域Smallになり、舵速度はδRH’となるため、角速度rRは指定旋回角速度r0を実現できることになる。
図16はそのシミュレーション結果であり、図16(A)は等減速比Rvd=2.23の一定とした場合、(B)は等減速比Rvdを可変とした場合である。等減速比Rvdを可変とすることによって、角速度rRを指定旋回角速度r0に一致させることができる。
【0283】
8.増減速時のロバスト性向上
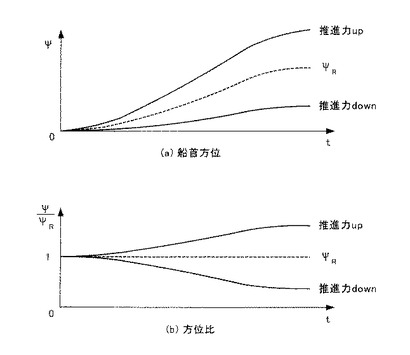
プロペラと舵との位置関係は図17に示すように前後に並んでおり、プロペラによる伴流が舵回りに沿って行くようになっている。操縦性指数の旋回力ゲインKsは舵回りの流速に比例するので、プロペラの回転数あるいはピッチ角が変化すると旋回力ゲインも同様に変化する。一方、船体の速度は大きな時定数の一次遅れ系のためにゆっくりと変化する。そのため伴流速度と船速との応答差が生じ、船速により旋回力ゲインを修正したとしてもその効果が期待できず、変針量および角速度は図18(a)に示すように推進力変化前の設定値を保持できない、という問題を発生する。また操縦性指数の時定数は、伴流の影響よりも船体と船速との関係によって支配される傾向をもつ。したがって増減速開始から定常船速に達するまで操縦性指数の時定数は一次遅れのゆっくりした変化になり、旋回力ゲインはそれに比べ迅速に変化する。よって旋回力ゲインのパラメータ不確かさに対する変針制御系のロバスト性の向上が課題になる。
【0284】
8.1 解決方法
船速は図17から船体に取り付けた速度計によって得られるが、伴流速度は直接に得られない。両者の時間応答は図19に示すように、伴流速度の方が船速の方より立上り時間が早いことが予想される。伴流速度の定常値は圧力差から船速のそれより高い。したがって船速変化時の旋回力ゲインは既に伴流速度が定常値に近づいている状態で実施されるので、伴流速度変化による旋回力ゲインを修正することは難しい。
【0285】
そこで、増減速時のスラスト変化が方位偏差となって表れる現象を利用して、旋回力ゲインの変化に伴う方位誤差または角速度誤差を低減する。変針応答はフィードバックによるものでなくフィードフォワードによるものが支配的であるから、対策はフィードフォワードに対して施す。
【0286】
参照針路ψRから船首方位ψまでの応答の方位比ψ/ψRは図18(a)を参照すると図18(b)のようになる。方位比は増速時で1以上に減速時で1以下になる。
方位比つまり伝達関数は、推進力変化に対する閉ループ応答がゆっくりなので無視すると、
【0287】
【数136】
の様に旋回力ゲイン比と等価になる。ここで、添字()aは実際値、()nはノミナル値を表しており、また、推進力変化は、プロペラ回転数に相当し、プロペラの下流部にある舵に作用するので、操縦性指数のうち、時定数Tsa、Ts3aへの影響を無視し、旋回力ゲインKsaに影響すると定め、Tsn=Tsa、Ts3n=Ts3aとする。これよりψ=ψRとするために、方位比
【0288】
【数137】
をフィードフォワード舵角δFFに掛けることによって、推進力変化を起因とする方位誤差を低減する。
【0289】
8.2 構成
図20は、増減速時のロバスト性向上を行った変形例の構成を表すブロック図である。図示したように、フィードフォワード制御器12−2の後段に、方位比乗算器12−6を備え、さらに、方位比演算部12−7、方位比制限部12−8を備えている。
方位比乗算器12−6は、フィードフォワード制御器12−2から出力されるフィードフォワード舵角δFFに方位比RKを乗算するものである。
【0290】
方位比演算部12−7は、方位比乗算器12−6で用いる方位比RKを演算するものである。(138式)を直接使用すると、方位が360度発信となり扱いにくいので、方位偏差ψe=ψR−ψを用いて(参照針路ψRはゼロからの変針量とする)
【0291】
【数138】
の関係を使用してRKを求める。ここでRKの初期値は1である。
【0292】
さらに、パタメータ不確かさ、ノイズ成分などによる影響を低減するために方位比制限部12−8で方位比乗算器12−6の方位比RKの変更に制限を掛ける。制限は、RKの変更に不感帯を設けることで行う。不感帯はパタメータ不確かさなどから10%から30%とするとよい。例えば、不感帯を10%とすると、初期値RK=1であるときに、しきい値Slash Hold Value SHV=0.1となり、方位比演算部12−7で求められた方位比RKが0.9未満、または1.1より超えたときに、方位比乗算器12−6の方位比RKを書き換える。
推進力変化に伴い船速も変化すると、船速修正が行われる。即ち、
【0293】
【数139】
であり、V、V0は船速で現在値と直前値を表す。なお船速修正はノミナル値や制御ゲインを更新するもので、参照方位やフィードフォワード舵角には反映されない。変針命令時に更新されたパラメータを用いて軌道計画が構成される。つまり船速修正の効果は変針命令がないと発揮されない。
【0294】
舵まわりの伴流速度は既に定常値に達しているので、船速修正が施されるとKsn=Ksaになり、旋回力比は1になり、その結果方位比も1に漸近する。方位比制限部12−8の制限を維持すると方位比が1に漸近できなくなるので、方位比制限部12−8の作動は、変針毎に一回限りとする。
【0295】
さらに方位比制限部12−8では、SHV の他に別の制限を加えることも可能である。変針量が小さい設定値以下のとき、SHVの制限と論理積を取って制限することも可能である。
尚、方位比の代わりに、応答性のよい角速度比を用いることも可能であるが、ノイズ成分による誤差が大きいため、方位比で修正することが望ましい。また、しきい値として、暴走対策として上限値を設定することもできる。
【0296】
以上で説明した、設定針路に船首方位を追従させるように制御する船舶用自動操舵装置は、計画航路に船体位置を追従させる航路制御系の一部として使用することも可能である。
【符号の説明】
【0297】
12 船舶用操舵装置
12−1 軌道演算部
12−2 フィードフォワード制御器
12−3 フィードバック制御器
rR 旋回角速度
C1a 旋回角加速度初期値
C2a 旋回角速度初期値
【特許請求の範囲】
【請求項1】
船舶の所望される変針量に対して参照針路を演算して出力する軌道演算部と、該参照針路からフィードフォワード舵角を演算して開ループ制御を行うフィードフォワード制御器と、を有し、前記軌道演算部は、参照針路を加速モード、等速モード及び減速モードに分けて出力し、加速モードにおいて、変針開始時点の旋回角加速度の初期値C1aと旋回角速度の初期値C2aとがゼロでない場合にその値を取り込んで参照針路を演算する船舶用自動操舵装置において、
前記軌道演算部は、前記初期値C1a、C2aをそれぞれゼロとして演算される参照針路に基づきフィードフォワード制御器から出力されるフィードフォワード舵角の舵速度が設定された最大舵速度を超えないように各モードを決めたときの加速モードの終端時及び等速モード時における旋回角速度rRを演算し、C2a>rRでC1a<0を満足する場合、またはC2a<rRでC1a>0を満足する場合には、加速モードにおける最大舵速度発生時点が各場合で常に同じになるように旋回角速度rRを修正し、該修正した旋回角速度rRを満足し且つ演算される参照針路に基づきフィードフォワード制御器から出力されるフィードフォワード舵角の舵速度が前記最大舵速度を超えないように各モードの参照針路を演算し、上記場合以外の場合には、修正しない旋回角速度rRを満足し且つ演算される参照針路に基づきフィードフォワード制御器から出力されるフィードフォワード舵角の舵速度が前記最大舵速度を超えないように各モードの参照針路を演算することを特徴とする船舶用自動操舵装置。
【請求項2】
前記軌道演算部の旋回角速度rRの演算は、等速モード及び減速モードのそれぞれの時間である等速時間及び減速時間の比を一定とした条件で行い、その結果が指定旋回角速度以上の場合には指定旋回角速度とし、指定旋回角速度以下の場合にその演算結果の角速度とすることを特徴とする請求項1記載の船舶用自動操舵装置。
【請求項3】
船舶の所望される変針量に対して参照針路を演算して出力する軌道演算部と、該参照針路からフィードフォワード舵角を演算して開ループ制御を行うフィードフォワード制御器と、を有し、前記軌道演算部は、参照針路を加速モード、等速モード及び減速モードに分けて出力し、加速モードにおいて、変針開始時点の旋回角加速度の初期値C1aと旋回角速度の初期値C2aとがゼロでない場合にその値を取り込んで参照針路を演算する船舶用自動操舵装置において、
前記軌道演算部は、前記初期値C1a、C2aをそれぞれゼロとして加速モードの終端時及び等速モード時における旋回角速度rRを求め、その際に、旋回角速度rRが指定旋回角速度r0に等しいと仮定したときに、演算される参照針路に基づきフィードフォワード制御器から出力されるフィードフォワード舵角が許容舵角以下の条件を満足するときに、旋回角速度rRを指定旋回角速度r0に決定し、該条件を満足しないときに、フィードフォワード舵角と許容舵角との偏差を最も小さくする角速度を旋回角速度rRに決定し、決定された旋回角速度rRとしたときのフィードフォワード制御器から出力されるフィードフォワード舵角の最大舵速度を求め、
C2a>rRでC1a<0を満足する場合、またはC2a<rRでC1a>0を満足する場合には、加速モードにおける最大舵速度発生時点が各場合で常に同じになるように旋回角速度rRを修正し、該修正した旋回角速度rRを満足し且つ演算される参照針路に基づきフィードフォワード制御器から出力されるフィードフォワード舵角の舵速度が前記最大舵速度を超えないように各モードの参照針路を演算し、上記場合以外の場合には、修正しない旋回角速度rRを満足し且つ演算される参照針路に基づきフィードフォワード制御器から出力されるフィードフォワード舵角の舵速度が前記最大舵速度を超えないように各モードの参照針路を演算することを特徴とする船舶用自動操舵装置。
【請求項4】
船舶の所望される変針量に対して参照針路を演算して出力する軌道演算部と、該参照針路からフィードフォワード舵角を演算して開ループ制御を行うフィードフォワード制御器と、を有し、前記軌道演算部は、参照針路を加速モード、等速モード及び減速モードに分けて出力し、加速モードにおいて、変針開始時点の旋回角加速度の初期値C1aと旋回角速度の初期値C2aがゼロでない場合にその値を取り込んで参照針路を演算する船舶用自動操舵装置において、
前記軌道演算部は、前記加速モードで前記初期値C1a、C2aを減衰させるために必要な方位変化量が所望される変針量よりも大きい場合に、加速モードを、初期値を減衰させる減衰モードと、前記等速モードの旋回角速度rRに収束させる通常モードとに分けて、それぞれのモードの参照針路を演算することを特徴とする船舶用自動操舵装置。
【請求項5】
前記旋回角加速度の初期値C1aと旋回角速度の初期値C2aは、変針開始時に変針中であったときの前回の変針に対して前記軌道演算部で演算を行った参照針路の2階微分と1階微分との変針開始時の値から求められることを特徴とする請求項1ないし4のいずれか1項に記載の船舶用自動操舵装置。
【請求項1】
船舶の所望される変針量に対して参照針路を演算して出力する軌道演算部と、該参照針路からフィードフォワード舵角を演算して開ループ制御を行うフィードフォワード制御器と、を有し、前記軌道演算部は、参照針路を加速モード、等速モード及び減速モードに分けて出力し、加速モードにおいて、変針開始時点の旋回角加速度の初期値C1aと旋回角速度の初期値C2aとがゼロでない場合にその値を取り込んで参照針路を演算する船舶用自動操舵装置において、
前記軌道演算部は、前記初期値C1a、C2aをそれぞれゼロとして演算される参照針路に基づきフィードフォワード制御器から出力されるフィードフォワード舵角の舵速度が設定された最大舵速度を超えないように各モードを決めたときの加速モードの終端時及び等速モード時における旋回角速度rRを演算し、C2a>rRでC1a<0を満足する場合、またはC2a<rRでC1a>0を満足する場合には、加速モードにおける最大舵速度発生時点が各場合で常に同じになるように旋回角速度rRを修正し、該修正した旋回角速度rRを満足し且つ演算される参照針路に基づきフィードフォワード制御器から出力されるフィードフォワード舵角の舵速度が前記最大舵速度を超えないように各モードの参照針路を演算し、上記場合以外の場合には、修正しない旋回角速度rRを満足し且つ演算される参照針路に基づきフィードフォワード制御器から出力されるフィードフォワード舵角の舵速度が前記最大舵速度を超えないように各モードの参照針路を演算することを特徴とする船舶用自動操舵装置。
【請求項2】
前記軌道演算部の旋回角速度rRの演算は、等速モード及び減速モードのそれぞれの時間である等速時間及び減速時間の比を一定とした条件で行い、その結果が指定旋回角速度以上の場合には指定旋回角速度とし、指定旋回角速度以下の場合にその演算結果の角速度とすることを特徴とする請求項1記載の船舶用自動操舵装置。
【請求項3】
船舶の所望される変針量に対して参照針路を演算して出力する軌道演算部と、該参照針路からフィードフォワード舵角を演算して開ループ制御を行うフィードフォワード制御器と、を有し、前記軌道演算部は、参照針路を加速モード、等速モード及び減速モードに分けて出力し、加速モードにおいて、変針開始時点の旋回角加速度の初期値C1aと旋回角速度の初期値C2aとがゼロでない場合にその値を取り込んで参照針路を演算する船舶用自動操舵装置において、
前記軌道演算部は、前記初期値C1a、C2aをそれぞれゼロとして加速モードの終端時及び等速モード時における旋回角速度rRを求め、その際に、旋回角速度rRが指定旋回角速度r0に等しいと仮定したときに、演算される参照針路に基づきフィードフォワード制御器から出力されるフィードフォワード舵角が許容舵角以下の条件を満足するときに、旋回角速度rRを指定旋回角速度r0に決定し、該条件を満足しないときに、フィードフォワード舵角と許容舵角との偏差を最も小さくする角速度を旋回角速度rRに決定し、決定された旋回角速度rRとしたときのフィードフォワード制御器から出力されるフィードフォワード舵角の最大舵速度を求め、
C2a>rRでC1a<0を満足する場合、またはC2a<rRでC1a>0を満足する場合には、加速モードにおける最大舵速度発生時点が各場合で常に同じになるように旋回角速度rRを修正し、該修正した旋回角速度rRを満足し且つ演算される参照針路に基づきフィードフォワード制御器から出力されるフィードフォワード舵角の舵速度が前記最大舵速度を超えないように各モードの参照針路を演算し、上記場合以外の場合には、修正しない旋回角速度rRを満足し且つ演算される参照針路に基づきフィードフォワード制御器から出力されるフィードフォワード舵角の舵速度が前記最大舵速度を超えないように各モードの参照針路を演算することを特徴とする船舶用自動操舵装置。
【請求項4】
船舶の所望される変針量に対して参照針路を演算して出力する軌道演算部と、該参照針路からフィードフォワード舵角を演算して開ループ制御を行うフィードフォワード制御器と、を有し、前記軌道演算部は、参照針路を加速モード、等速モード及び減速モードに分けて出力し、加速モードにおいて、変針開始時点の旋回角加速度の初期値C1aと旋回角速度の初期値C2aがゼロでない場合にその値を取り込んで参照針路を演算する船舶用自動操舵装置において、
前記軌道演算部は、前記加速モードで前記初期値C1a、C2aを減衰させるために必要な方位変化量が所望される変針量よりも大きい場合に、加速モードを、初期値を減衰させる減衰モードと、前記等速モードの旋回角速度rRに収束させる通常モードとに分けて、それぞれのモードの参照針路を演算することを特徴とする船舶用自動操舵装置。
【請求項5】
前記旋回角加速度の初期値C1aと旋回角速度の初期値C2aは、変針開始時に変針中であったときの前回の変針に対して前記軌道演算部で演算を行った参照針路の2階微分と1階微分との変針開始時の値から求められることを特徴とする請求項1ないし4のいずれか1項に記載の船舶用自動操舵装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【公開番号】特開2012−210941(P2012−210941A)
【公開日】平成24年11月1日(2012.11.1)
【国際特許分類】
【出願番号】特願2012−153415(P2012−153415)
【出願日】平成24年7月9日(2012.7.9)
【分割の表示】特願2007−96699(P2007−96699)の分割
【原出願日】平成19年4月2日(2007.4.2)
【出願人】(000003388)東京計器株式会社 (103)
【公開日】平成24年11月1日(2012.11.1)
【国際特許分類】
【出願日】平成24年7月9日(2012.7.9)
【分割の表示】特願2007−96699(P2007−96699)の分割
【原出願日】平成19年4月2日(2007.4.2)
【出願人】(000003388)東京計器株式会社 (103)
[ Back to top ]