
船舶用航行支援装置
【課題】衝突の危険性があるとの認識を共有することにより、衝突の危険を回避する行動を適切に行えるようになる船舶用航行支援装置を提供する。
【解決手段】AIS装置4が、GPS情報から自船の位置、針路、速度を測定し、測定された自船の位置、針路、速度を含むAIS情報をAISアンテナ2から送信させる。また、μCOM5は、自船のAIS情報とAISアンテナ2が受信した他船のAIS情報から自船及び他船の衝突確率を算出し、閾値以上のときにその旨を警報すると共に、その旨を示す警報信号をAISアンテナ2から他船に送信させる。
【解決手段】AIS装置4が、GPS情報から自船の位置、針路、速度を測定し、測定された自船の位置、針路、速度を含むAIS情報をAISアンテナ2から送信させる。また、μCOM5は、自船のAIS情報とAISアンテナ2が受信した他船のAIS情報から自船及び他船の衝突確率を算出し、閾値以上のときにその旨を警報すると共に、その旨を示す警報信号をAISアンテナ2から他船に送信させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、船舶用航行支援装置に係り、特に、船舶に搭載されて航行支援を行う船舶用航行支援装置に関するものである。
【背景技術】
【0002】
近年、自船の位置、針路、速度などを含むAIS情報を送信すると共に他船から送信される他船の位置、針路、速度などを含むAIS情報を受信して、他船を識別する船舶自動識別装置(Automatic Identification System)(以下AIS装置という)の搭載が大型船に義務付けられている。
【0003】
また、AIS装置を利用して得た自船の位置、針路、速度と他船の位置、針路、速度とから自船と他船との衝突確率を算出して、算出された衝突確率が閾値以上のときにその旨を報知する船舶用航行支援装置も提案されている(特許文献1)。
【0004】
上記船舶用航行支援装置において、上述した閾値は船舶毎に自由に設定することができる。このため、例えば船Aの閾値が高めに設定され、船Bの閾値が低めに設定されていると、船Bでは衝突確率が閾値を超えていて、衝突の危険性があると認識しているが、船Aでは衝突確率が閾値を超えておらず、衝突の危険性を認識していないという事態が発生する。このため、船A、Bともに衝突の危険を回避する行動が適切に行えない、という問題があった。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2005−289264号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
そこで、本発明は、衝突の危険性があるとの認識を共有することにより、衝突の危険を回避する行動を適切に行えるようになる船舶用航行支援装置を提供することを課題とする。
【課題を解決するための手段】
【0007】
上述した課題を解決するための請求項1記載の発明は、船舶に搭載されて航行支援を行う船舶用航行支援装置であって、他船と無線通信を行うための無線アンテナと、自船の位置、針路、速度を測定する測定手段と、前記測定された自船の位置、針路、速度を前記無線アンテナから送信させる情報送信手段と、前記測定された自船の位置、針路、速度と前記無線アンテナが受信した他船の位置、針路、速度から前記自船及び前記他船の衝突確率を算出する衝突確率算出手段と、前記算出された衝突確率が閾値以上のときにその旨を警報する警報手段と、を備えた船舶用航行支援装置において、前記算出された衝突確率が閾値以上のとき、その旨を示す警報信号を前記無線アンテナから前記他船に送信させる警報送信手段をさらに備えたことを特徴とする船舶用航行支援装置に存する。
【0008】
請求項2記載の発明は、前記無線アンテナが前記警報信号を受信すると、警報信号を受信した旨を示す回答を前記無線アンテナから送信させる回答送信手段をさらに備えたことを特徴とする請求項1に記載の船舶用航行支援装置に存する。
【発明の効果】
【0009】
以上説明したように請求項1記載の発明によれば、警報送信手段が、算出された衝突確率が閾値以上のとき、その旨を示す警報信号を無線アンテナから他船に送信するので、互いに衝突する危険性がある自船と他船との間でその危険性があるとの認識を共有することができ、衝突の危険を回避する行動を適切に行えるようになる。
【0010】
請求項2記載の発明によれば、回答送信手段が、警報信号を受信すると、警報信号を受信した旨を示す回答を無線アンテナから送信させるので、他船と危険性があるとの認識を共有できたことがわかり、より一層、衝突の危険を回避する行動を適切に行えるようになる。
【図面の簡単な説明】
【0011】
【図1】本発明の船舶用航行支援装置の一実施形態を示すブロック図である。
【図2】図1に示す船舶用航行支援装置を構成するμCOMの衝突確率算出処理手順を示すフローチャートである。
【図3】図1に示す船舶用航行支援装置を構成するμCOMの警報信号受信処理手順を示すフローチャートである。
【図4】通常時に図1に示す表示装置に表示される表示画面の一例を示す。
【図5】衝突確率が閾値を超えたときに図1に示す表示装置に表示される表示画面の一例を示す。
【図6】OZT表示を行ったときに図1に示す表示装置に表示される表示画面の一例を示す。
【図7】OZT法を説明すための説明図である。
【発明を実施するための形態】
【0012】
以下、本発明の船舶用航行支援装置について図1を参照して説明する。図1は、本発明の船舶用航行支援装置の一実施形態を示すブロック図である。同図に示す船舶用航行支援装置1は、船舶に搭載されて航行支援を行う。
【0013】
同図に示すように、船舶航行支援装置1は、他船と無線通信を行うための無線アンテナとしてのAISアンテナ2と、衛星から自船の現在位置を示すGPS情報を受信して、受信したGPS情報を後述するAIS装置4に供給するGPS受信機3と、これらAISアンテナ2及びGPS受信機3に接続されたAIS装置4と、を備えている。
【0014】
上記AIS装置4は、中央演算処理装置(CPU)などから構成され、AISアンテナ2に他船からのAIS情報を受信させる。他船からのAIS情報は、他船のMMSIやIMO番号などの識別番号、位置、針路、速度などが含まれている。そして、上記AIS装置4は、AISアンテナ2が他船のAIS情報を受信すると、受信したAIS情報を後述するμCOM5に対して供給する。
【0015】
また、AIS装置4は、測定手段として働き、GPS受信機3からのGPS情報を定期的に取り込んで自船の位置、針路、速度を測定すると共に、自船の識別番号、測定した位置、針路、速度などを含んだAIS情報を定期的に作成する。そして、AIS装置4は、自船のAIS情報を作成する毎に、情報送信手段として働き、作成した自船のAIS情報をAISアンテナ2から送信させると共に後述するμCOM5に対して供給する。なお、AIS情報の送信は、原則6分毎に行われ、船の速度が速くなるに従って送信間隔が短くなる。
【0016】
また、船舶航行支援装置1は、パーソナルコンピュータなどのμCOM5と、表示装置6と、をさらに備えている。上記μCOM5は、衝突確率算出手段として働き、AIS装置4から供給された自船のAIS情報と他船のAIS情報とから自船及び他船の衝突確率を算出する。また、μCOM5は、警報手段として働き、算出された衝突確率が閾値以上のときにその旨を警報すると共に、警報送信手段として働き、AIS装置4を制御して衝突の危険のある他船宛に警報信号をAISアンテナ2から送信させる。警報信号には、自船の識別番号、衝突確率、衝突までの予測時間などが含まれている。
【0017】
AIS装置4は、警報信号を受信すると、それをμCOM5に対して供給する。警報信号を受信すると、μCOM5は、警報信号を受信した旨を表示装置6に表示すると共に、回答送信手段として働き、AIS装置4を制御して警報信号を受信した旨を示す回答をAISアンテナ2から送信させる。
【0018】
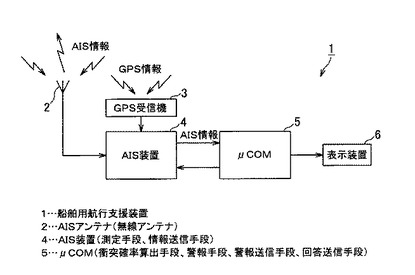
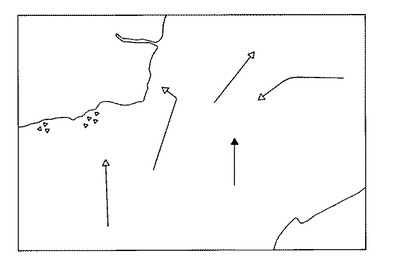
次に、上記概略で説明した船舶航行支援装置1の詳細な動作について、図2に示すフローチャートを参照して説明する。まず、電源にオンに応じてμCOM5は、AIS装置4から供給された自船のAIS情報から自船の現在位置を求め、図4に示すように、自船周辺の海図を表示装置6に表示させる(ステップS1)。また、μCOM5は、AIS装置4から自船のAIS情報、他船のAIS情報が供給される毎にそれらを解析し、識別番号で識別されたAIS情報のデータベースを作成する(ステップS2)。
【0019】
その後、μCOM5は、データベースを参照にして、図4に示すように、自船、他船の現在位置及び過去の位置を結んだ航跡を表示装置6に表示させる(ステップS3)。図4中、黒塗りの三角マークが自船を示し、白塗りの三角マークが他船を示し、三角マークから伸びる線が航跡を示す。なお、自船と他船とを識別できるように色を変えても良い。
【0020】
次に、μCOM5は、データベースに記録された自船の位置、針路、速度と他船の位置、針路、速度とから自船及び他船の衝突確率を算出する(ステップS4)。この衝突確率の算出方法としては、例えば、TCPA/DCPA法、OZT法などの公知の方法を用いて行われる。
【0021】
TCPA/DCPA法は、自船の位置、針路、速度から自船の将来の予測航跡を求めると共に、他船の位置、針路、速度から他船の将来の予測航跡を求め、これら自船、他船の予測航跡から最接近時間(TCPA)と最接近距離(DCPA)とを求め、この求めたTCPA、DCPAから衝突確率を算出する方法である。衝突確率は、TCPAが短く、DCPAが小さいほど大きくなるように算出される。
【0022】
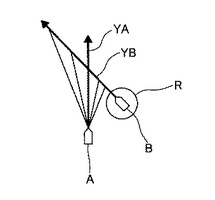
一方、OZT法は、図7に示すように、まず他船B上に安全航過距離を半径とする評価円Rを配置し、自船A、他船Bが矢印YA、YBに示すように現在の針路、速度を維持した場合に、上記評価円R内に同時に自船A、他船Bの両者が存在する確率を衝突確率として算出する方法である。
【0023】
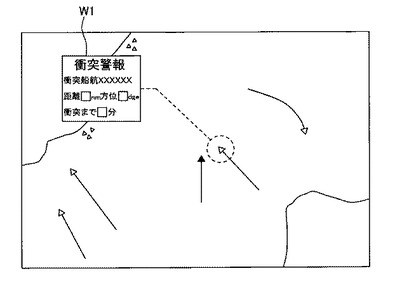
次に、μCOM5は、算出した衝突確率が閾値を超えていない場合(ステップS5でN)、再びステップS1に戻る。一方、μCOM5は、算出した衝突確率が閾値を超えていた場合(ステップS5でY)、図5に示すように、表示装置6に表示された海図上において衝突確率が閾値を超えている他船を丸で囲むと共にその他船の識別番号、他船との距離、他船の方位、衝突までの時間を表示した衝突警報ウインドウW1を重畳する(ステップS6)。さらに、μCOM5は、図示しないスピーカを制御して衝突確率が閾値を越えた旨の警報音を発生させる(ステップS7)。
【0024】
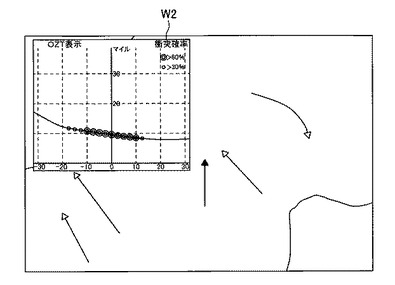
その後、μCOM5は、図6に示すように表示装置6に表示された海図上にOZT表示ウインドウW2を表示して衝突を回避するための針路を提示する(ステップS8)。図6に示すように、OZT表示ウインドウW2は、横軸を自船の針路、縦軸をその針路で自船が進んだときの他船の予測航路である矢印YB(図7参照)までの距離を示すグラフである。さらに、上述したOZT法を用いて、自船Aが現在の速度を維持して例えば針路−30°〜30°の範囲でそれぞれ進み、他船Bが現在の針路、速度を維持した場合に、評価円R内に同時に自船A、他船Bの両者が存在する確率を求めて、上記グラフ上にプロットしている。このOZT表示ウインドウW2を見ると、図6に示すように針路を−10°〜10°にすると衝突確率が60%となり、針路を−20°〜−10°、15°あたりにすると衝突確率が30%となり、針路を−20°以下又は15°以上にすると衝突確率が下がることが分かる。
【0025】
その後、μCOM5は、AIS装置4を制御して、衝突確率が閾値を越えた他船宛に警報信号を送信する(ステップS9)。その後、μCOM5は、他船から警報信号を受け取った旨を示す回答が受信されるのを待って(ステップS10でY)、ステップS1に戻る。一方、所定時間を過ぎても回答が受信されなかった場合(ステップS10でN、かつ、ステップS11でY)、μCOM5は再びステップS9に戻り警報信号を再送する。
【0026】
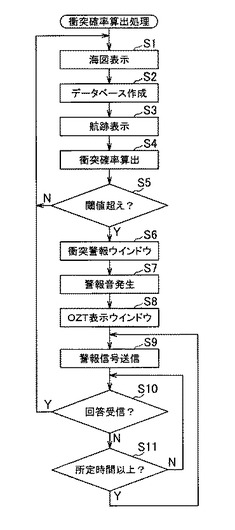
次に、警報信号受信処理について説明する。電源がオンするとμCOM5は、上記衝突確率算出処理と並列に衝突確率受信処理を開始する。衝突確率受信処理においてμCOM5は、まずAIS装置4が他船から警報信号を受信すると(ステップS12でY)、図5に示すように表示装置6に表示された海図上において警報信号を送信してきた他船を丸で囲むと共にその他船の識別番号、他船との距離、他船の方位、衝突までの時間を表示した衝突警報ウインドウW1を重畳する(ステップS13)。
【0027】
さらに、μCOM5は、図示しないスピーカを制御して警報信号を受け取った旨の警報音を発生させる(ステップS14)。その後、μCOM5は、AIS装置4を制御して警報信号を受け取った旨の回答を送信してきた船宛に送信して(ステップS15)、ステップS12に戻る。
【0028】
上述した船舶航行支援装置1によれば、μCOM5が、算出された衝突確率が閾値以上のとき、その旨を示す警報信号をAISアンテナ2から他船に送信するので、互いに衝突する危険性がある自船と他船との間でその危険性があるとの認識を共有することができ、衝突の危険を回避する行動を適切に行えるようになる。
【0029】
また、上述した船舶航行支援装置1によれば、μCOM5が、他船から警報信号を受信すると、AIS装置4を制御してこれを受け取った旨の回答をAISアンテナ2から他船に送信するので、他船と危険性があるとの認識を共有できたことがわかり、より一層、衝突の危険を回避する行動を適切に行えるようになる。
【0030】
なお、上述した実施形態によれば、警報信号を受信するとその旨を示す回答をAISアンテナ2から送信していたが、本発明はこれに限ったものではない。回答の送信は必須ではなく、送信しなくてもよい。
【0031】
まあ、上述した実施形態によれば、図5及び図6に示すように、海図上に衝突警報ウインドウW1、OZT表示ウインドウW2を重畳していたが、本発明はこれに限ったものではない。例えば、表示装置6の画面を2分割して、海図と衝突警報ウインドウW1やOZT表示ウインドウW2を並べて表示してもよい。
【0032】
また、前述した実施形態は本発明の代表的な形態を示したに過ぎず、本発明は、実施形態に限定されるものではない。即ち、本発明の骨子を逸脱しない範囲で種々変形して実施することができる。
【符号の説明】
【0033】
1 船舶用航行支援装置
2 AISアンテナ(無線アンテナ)
4 AIS装置(測定手段、情報送信手段)
5 μCOM(衝突確率算出手段、警報手段、警報送信手段、回答送信手段)
【技術分野】
【0001】
本発明は、船舶用航行支援装置に係り、特に、船舶に搭載されて航行支援を行う船舶用航行支援装置に関するものである。
【背景技術】
【0002】
近年、自船の位置、針路、速度などを含むAIS情報を送信すると共に他船から送信される他船の位置、針路、速度などを含むAIS情報を受信して、他船を識別する船舶自動識別装置(Automatic Identification System)(以下AIS装置という)の搭載が大型船に義務付けられている。
【0003】
また、AIS装置を利用して得た自船の位置、針路、速度と他船の位置、針路、速度とから自船と他船との衝突確率を算出して、算出された衝突確率が閾値以上のときにその旨を報知する船舶用航行支援装置も提案されている(特許文献1)。
【0004】
上記船舶用航行支援装置において、上述した閾値は船舶毎に自由に設定することができる。このため、例えば船Aの閾値が高めに設定され、船Bの閾値が低めに設定されていると、船Bでは衝突確率が閾値を超えていて、衝突の危険性があると認識しているが、船Aでは衝突確率が閾値を超えておらず、衝突の危険性を認識していないという事態が発生する。このため、船A、Bともに衝突の危険を回避する行動が適切に行えない、という問題があった。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2005−289264号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
そこで、本発明は、衝突の危険性があるとの認識を共有することにより、衝突の危険を回避する行動を適切に行えるようになる船舶用航行支援装置を提供することを課題とする。
【課題を解決するための手段】
【0007】
上述した課題を解決するための請求項1記載の発明は、船舶に搭載されて航行支援を行う船舶用航行支援装置であって、他船と無線通信を行うための無線アンテナと、自船の位置、針路、速度を測定する測定手段と、前記測定された自船の位置、針路、速度を前記無線アンテナから送信させる情報送信手段と、前記測定された自船の位置、針路、速度と前記無線アンテナが受信した他船の位置、針路、速度から前記自船及び前記他船の衝突確率を算出する衝突確率算出手段と、前記算出された衝突確率が閾値以上のときにその旨を警報する警報手段と、を備えた船舶用航行支援装置において、前記算出された衝突確率が閾値以上のとき、その旨を示す警報信号を前記無線アンテナから前記他船に送信させる警報送信手段をさらに備えたことを特徴とする船舶用航行支援装置に存する。
【0008】
請求項2記載の発明は、前記無線アンテナが前記警報信号を受信すると、警報信号を受信した旨を示す回答を前記無線アンテナから送信させる回答送信手段をさらに備えたことを特徴とする請求項1に記載の船舶用航行支援装置に存する。
【発明の効果】
【0009】
以上説明したように請求項1記載の発明によれば、警報送信手段が、算出された衝突確率が閾値以上のとき、その旨を示す警報信号を無線アンテナから他船に送信するので、互いに衝突する危険性がある自船と他船との間でその危険性があるとの認識を共有することができ、衝突の危険を回避する行動を適切に行えるようになる。
【0010】
請求項2記載の発明によれば、回答送信手段が、警報信号を受信すると、警報信号を受信した旨を示す回答を無線アンテナから送信させるので、他船と危険性があるとの認識を共有できたことがわかり、より一層、衝突の危険を回避する行動を適切に行えるようになる。
【図面の簡単な説明】
【0011】
【図1】本発明の船舶用航行支援装置の一実施形態を示すブロック図である。
【図2】図1に示す船舶用航行支援装置を構成するμCOMの衝突確率算出処理手順を示すフローチャートである。
【図3】図1に示す船舶用航行支援装置を構成するμCOMの警報信号受信処理手順を示すフローチャートである。
【図4】通常時に図1に示す表示装置に表示される表示画面の一例を示す。
【図5】衝突確率が閾値を超えたときに図1に示す表示装置に表示される表示画面の一例を示す。
【図6】OZT表示を行ったときに図1に示す表示装置に表示される表示画面の一例を示す。
【図7】OZT法を説明すための説明図である。
【発明を実施するための形態】
【0012】
以下、本発明の船舶用航行支援装置について図1を参照して説明する。図1は、本発明の船舶用航行支援装置の一実施形態を示すブロック図である。同図に示す船舶用航行支援装置1は、船舶に搭載されて航行支援を行う。
【0013】
同図に示すように、船舶航行支援装置1は、他船と無線通信を行うための無線アンテナとしてのAISアンテナ2と、衛星から自船の現在位置を示すGPS情報を受信して、受信したGPS情報を後述するAIS装置4に供給するGPS受信機3と、これらAISアンテナ2及びGPS受信機3に接続されたAIS装置4と、を備えている。
【0014】
上記AIS装置4は、中央演算処理装置(CPU)などから構成され、AISアンテナ2に他船からのAIS情報を受信させる。他船からのAIS情報は、他船のMMSIやIMO番号などの識別番号、位置、針路、速度などが含まれている。そして、上記AIS装置4は、AISアンテナ2が他船のAIS情報を受信すると、受信したAIS情報を後述するμCOM5に対して供給する。
【0015】
また、AIS装置4は、測定手段として働き、GPS受信機3からのGPS情報を定期的に取り込んで自船の位置、針路、速度を測定すると共に、自船の識別番号、測定した位置、針路、速度などを含んだAIS情報を定期的に作成する。そして、AIS装置4は、自船のAIS情報を作成する毎に、情報送信手段として働き、作成した自船のAIS情報をAISアンテナ2から送信させると共に後述するμCOM5に対して供給する。なお、AIS情報の送信は、原則6分毎に行われ、船の速度が速くなるに従って送信間隔が短くなる。
【0016】
また、船舶航行支援装置1は、パーソナルコンピュータなどのμCOM5と、表示装置6と、をさらに備えている。上記μCOM5は、衝突確率算出手段として働き、AIS装置4から供給された自船のAIS情報と他船のAIS情報とから自船及び他船の衝突確率を算出する。また、μCOM5は、警報手段として働き、算出された衝突確率が閾値以上のときにその旨を警報すると共に、警報送信手段として働き、AIS装置4を制御して衝突の危険のある他船宛に警報信号をAISアンテナ2から送信させる。警報信号には、自船の識別番号、衝突確率、衝突までの予測時間などが含まれている。
【0017】
AIS装置4は、警報信号を受信すると、それをμCOM5に対して供給する。警報信号を受信すると、μCOM5は、警報信号を受信した旨を表示装置6に表示すると共に、回答送信手段として働き、AIS装置4を制御して警報信号を受信した旨を示す回答をAISアンテナ2から送信させる。
【0018】
次に、上記概略で説明した船舶航行支援装置1の詳細な動作について、図2に示すフローチャートを参照して説明する。まず、電源にオンに応じてμCOM5は、AIS装置4から供給された自船のAIS情報から自船の現在位置を求め、図4に示すように、自船周辺の海図を表示装置6に表示させる(ステップS1)。また、μCOM5は、AIS装置4から自船のAIS情報、他船のAIS情報が供給される毎にそれらを解析し、識別番号で識別されたAIS情報のデータベースを作成する(ステップS2)。
【0019】
その後、μCOM5は、データベースを参照にして、図4に示すように、自船、他船の現在位置及び過去の位置を結んだ航跡を表示装置6に表示させる(ステップS3)。図4中、黒塗りの三角マークが自船を示し、白塗りの三角マークが他船を示し、三角マークから伸びる線が航跡を示す。なお、自船と他船とを識別できるように色を変えても良い。
【0020】
次に、μCOM5は、データベースに記録された自船の位置、針路、速度と他船の位置、針路、速度とから自船及び他船の衝突確率を算出する(ステップS4)。この衝突確率の算出方法としては、例えば、TCPA/DCPA法、OZT法などの公知の方法を用いて行われる。
【0021】
TCPA/DCPA法は、自船の位置、針路、速度から自船の将来の予測航跡を求めると共に、他船の位置、針路、速度から他船の将来の予測航跡を求め、これら自船、他船の予測航跡から最接近時間(TCPA)と最接近距離(DCPA)とを求め、この求めたTCPA、DCPAから衝突確率を算出する方法である。衝突確率は、TCPAが短く、DCPAが小さいほど大きくなるように算出される。
【0022】
一方、OZT法は、図7に示すように、まず他船B上に安全航過距離を半径とする評価円Rを配置し、自船A、他船Bが矢印YA、YBに示すように現在の針路、速度を維持した場合に、上記評価円R内に同時に自船A、他船Bの両者が存在する確率を衝突確率として算出する方法である。
【0023】
次に、μCOM5は、算出した衝突確率が閾値を超えていない場合(ステップS5でN)、再びステップS1に戻る。一方、μCOM5は、算出した衝突確率が閾値を超えていた場合(ステップS5でY)、図5に示すように、表示装置6に表示された海図上において衝突確率が閾値を超えている他船を丸で囲むと共にその他船の識別番号、他船との距離、他船の方位、衝突までの時間を表示した衝突警報ウインドウW1を重畳する(ステップS6)。さらに、μCOM5は、図示しないスピーカを制御して衝突確率が閾値を越えた旨の警報音を発生させる(ステップS7)。
【0024】
その後、μCOM5は、図6に示すように表示装置6に表示された海図上にOZT表示ウインドウW2を表示して衝突を回避するための針路を提示する(ステップS8)。図6に示すように、OZT表示ウインドウW2は、横軸を自船の針路、縦軸をその針路で自船が進んだときの他船の予測航路である矢印YB(図7参照)までの距離を示すグラフである。さらに、上述したOZT法を用いて、自船Aが現在の速度を維持して例えば針路−30°〜30°の範囲でそれぞれ進み、他船Bが現在の針路、速度を維持した場合に、評価円R内に同時に自船A、他船Bの両者が存在する確率を求めて、上記グラフ上にプロットしている。このOZT表示ウインドウW2を見ると、図6に示すように針路を−10°〜10°にすると衝突確率が60%となり、針路を−20°〜−10°、15°あたりにすると衝突確率が30%となり、針路を−20°以下又は15°以上にすると衝突確率が下がることが分かる。
【0025】
その後、μCOM5は、AIS装置4を制御して、衝突確率が閾値を越えた他船宛に警報信号を送信する(ステップS9)。その後、μCOM5は、他船から警報信号を受け取った旨を示す回答が受信されるのを待って(ステップS10でY)、ステップS1に戻る。一方、所定時間を過ぎても回答が受信されなかった場合(ステップS10でN、かつ、ステップS11でY)、μCOM5は再びステップS9に戻り警報信号を再送する。
【0026】
次に、警報信号受信処理について説明する。電源がオンするとμCOM5は、上記衝突確率算出処理と並列に衝突確率受信処理を開始する。衝突確率受信処理においてμCOM5は、まずAIS装置4が他船から警報信号を受信すると(ステップS12でY)、図5に示すように表示装置6に表示された海図上において警報信号を送信してきた他船を丸で囲むと共にその他船の識別番号、他船との距離、他船の方位、衝突までの時間を表示した衝突警報ウインドウW1を重畳する(ステップS13)。
【0027】
さらに、μCOM5は、図示しないスピーカを制御して警報信号を受け取った旨の警報音を発生させる(ステップS14)。その後、μCOM5は、AIS装置4を制御して警報信号を受け取った旨の回答を送信してきた船宛に送信して(ステップS15)、ステップS12に戻る。
【0028】
上述した船舶航行支援装置1によれば、μCOM5が、算出された衝突確率が閾値以上のとき、その旨を示す警報信号をAISアンテナ2から他船に送信するので、互いに衝突する危険性がある自船と他船との間でその危険性があるとの認識を共有することができ、衝突の危険を回避する行動を適切に行えるようになる。
【0029】
また、上述した船舶航行支援装置1によれば、μCOM5が、他船から警報信号を受信すると、AIS装置4を制御してこれを受け取った旨の回答をAISアンテナ2から他船に送信するので、他船と危険性があるとの認識を共有できたことがわかり、より一層、衝突の危険を回避する行動を適切に行えるようになる。
【0030】
なお、上述した実施形態によれば、警報信号を受信するとその旨を示す回答をAISアンテナ2から送信していたが、本発明はこれに限ったものではない。回答の送信は必須ではなく、送信しなくてもよい。
【0031】
まあ、上述した実施形態によれば、図5及び図6に示すように、海図上に衝突警報ウインドウW1、OZT表示ウインドウW2を重畳していたが、本発明はこれに限ったものではない。例えば、表示装置6の画面を2分割して、海図と衝突警報ウインドウW1やOZT表示ウインドウW2を並べて表示してもよい。
【0032】
また、前述した実施形態は本発明の代表的な形態を示したに過ぎず、本発明は、実施形態に限定されるものではない。即ち、本発明の骨子を逸脱しない範囲で種々変形して実施することができる。
【符号の説明】
【0033】
1 船舶用航行支援装置
2 AISアンテナ(無線アンテナ)
4 AIS装置(測定手段、情報送信手段)
5 μCOM(衝突確率算出手段、警報手段、警報送信手段、回答送信手段)
【特許請求の範囲】
【請求項1】
船舶に搭載されて航行支援を行う船舶用航行支援装置であって、他船と無線通信を行うための無線アンテナと、自船の位置、針路、速度を測定する測定手段と、前記測定された自船の位置、針路、速度を前記無線アンテナから送信させる情報送信手段と、前記測定された自船の位置、針路、速度と前記無線アンテナが受信した他船の位置、針路、速度から前記自船及び前記他船の衝突確率を算出する衝突確率算出手段と、前記算出された衝突確率が閾値以上のときにその旨を警報する警報手段と、を備えた船舶用航行支援装置において、
前記算出された衝突確率が閾値以上のとき、その旨を示す警報信号を前記無線アンテナから前記他船に送信させる警報送信手段をさらに備えたことを特徴とする船舶用航行支援装置。
【請求項2】
前記無線アンテナが前記警報信号を受信すると、警報信号を受信した旨を示す回答を前記無線アンテナから送信させる回答送信手段をさらに備えた
ことを特徴とする請求項1に記載の船舶用航行支援装置。
【請求項1】
船舶に搭載されて航行支援を行う船舶用航行支援装置であって、他船と無線通信を行うための無線アンテナと、自船の位置、針路、速度を測定する測定手段と、前記測定された自船の位置、針路、速度を前記無線アンテナから送信させる情報送信手段と、前記測定された自船の位置、針路、速度と前記無線アンテナが受信した他船の位置、針路、速度から前記自船及び前記他船の衝突確率を算出する衝突確率算出手段と、前記算出された衝突確率が閾値以上のときにその旨を警報する警報手段と、を備えた船舶用航行支援装置において、
前記算出された衝突確率が閾値以上のとき、その旨を示す警報信号を前記無線アンテナから前記他船に送信させる警報送信手段をさらに備えたことを特徴とする船舶用航行支援装置。
【請求項2】
前記無線アンテナが前記警報信号を受信すると、警報信号を受信した旨を示す回答を前記無線アンテナから送信させる回答送信手段をさらに備えた
ことを特徴とする請求項1に記載の船舶用航行支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−28296(P2013−28296A)
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願番号】特願2011−166426(P2011−166426)
【出願日】平成23年7月29日(2011.7.29)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 発行者名: 海洋政策研究財団 (財団法人シップ・アンド・オーシャン財団) 刊行物名: 平成22年度 技術開発基金による研究開発報告書(第30集) 発行年月日:平成23年5月
【出願人】(591118041)財団法人シップ・アンド・オーシャン財団 (21)
【出願人】(503287719)
【出願人】(597030338)セナーアンドバーンズ株式会社 (3)
【Fターム(参考)】
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願日】平成23年7月29日(2011.7.29)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 発行者名: 海洋政策研究財団 (財団法人シップ・アンド・オーシャン財団) 刊行物名: 平成22年度 技術開発基金による研究開発報告書(第30集) 発行年月日:平成23年5月
【出願人】(591118041)財団法人シップ・アンド・オーシャン財団 (21)
【出願人】(503287719)
【出願人】(597030338)セナーアンドバーンズ株式会社 (3)
【Fターム(参考)】
[ Back to top ]