
船舶運航支援装置
【課題】適正燃費を達成し、操縦者の操縦上の負担を大幅に軽減することができる船舶運航支援装置を提供する。
【解決手段】入力手段22によって入力される船舶の航行情報と、及び記憶手段25から得られる前記航行情報に関連する海象情報と、位置情報認識手段30によって取得される航行中の船舶10の位置情報とから、前記航行情報に基づく船舶10の航行中の少なくとも推奨回転数情報を有する燃費情報を作成する制御手段23と、前記推奨回転数情報と実回転数情報とを操縦者に認識可能に表示する表示手段24とを有する船舶運航支援装置である。
【解決手段】入力手段22によって入力される船舶の航行情報と、及び記憶手段25から得られる前記航行情報に関連する海象情報と、位置情報認識手段30によって取得される航行中の船舶10の位置情報とから、前記航行情報に基づく船舶10の航行中の少なくとも推奨回転数情報を有する燃費情報を作成する制御手段23と、前記推奨回転数情報と実回転数情報とを操縦者に認識可能に表示する表示手段24とを有する船舶運航支援装置である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、船舶の運航を支援する船舶運航支援装置に関し、特に、最適な燃費による航行を支援する船舶運航支援装置に関する。
【背景技術】
【0002】
従来より、船舶の航行において、航海情報(自船位置、船速、方位等)を航行支援に用いて、船舶の運航の省力化や、目的港への到着時刻の定時性や、燃費を向上させる技術が特許文献1〜3に開示されている。
特許文献1に記載された発明は、航行位置情報により決定航路の設定船速が計算される。さらに設定船速は主機関の回転数設定信号に変換され、主機関の制御系統の制御演算回路に印加される。このような構成によって、従来独立して行われてきた操舵制御と主機関の制御とを統括し、安全性確保やエネルギー効率を最適化し、船舶の運航の省力化を実現できるとしている。
【0003】
また、特許文献2に記載された発明は、航路に沿う上記船舶の通過予定海域の気象海象予報を順次受信する気象海象予報受信手段と、同気象海象予報受信手段により受信された気象海象予報に基づき上記船舶の主機関の出力制御および操舵装置による舵角制御を順次行う。すなわち、出発港から目的港までの航路に沿う所要数の通過点ごとに同船舶の通過予定時刻を統計処理により補正して許容誤差内に納めることにより、目的港への到着時刻の定時性を維持できる効果を奏するとしている。
【0004】
また、特許文献3に記載された発明は、就航情報、海象状況、速力状況、馬力状況、燃費状況、主機関の回転数状況等のデータを得られ、就航状況を確認できる。また、実海域性能推定・評価のデータとして、シーマージン解析、船速低下解析、平均燃料消費率解析、モード解析等のデータが得られ、これらのデータは契約速力、バンカー契約の採算計算に活用することができる。すなわち、実海域での船体性能を精度よく推定して、実運航にフィードバックすることで、燃費を向上し、CO2排出量の削減し、到着予定時刻の精度を向上し、効果的な修繕計画を立てることができるという効果を奏する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開昭62−279195号公報
【特許文献2】特開2007−45338号公報
【特許文献3】特開2009−286230号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、特許文献1及び特許文献2に記載された発明は、当該船舶の主機関を直接制御するものであり、最適な燃費による航行を支援するものではない。
また、特許文献3に記載された発明は、就航解析をおこなった結果、対象船舶に関する各種データを収集及び蓄積し、対象船舶におけるデータ統計解析、実海域性能の推定と評価、船舶の性能の悪化の要因分析等を行うにすぎない。
【0007】
すなわち、船舶を航行中の操縦者は、自身の経験や勘から表示された情報を分析して操縦することには変わりなく、操縦者の操縦上の負担は依然として軽減されていない。特に、船舶の出力及び燃費は、当該船舶の速力の3乗に比例するため、モニタ(支援装置)に表示された速力を分析して操縦することは操縦者の負担軽減に寄与するものではない。また、船舶の航行中、操縦者は、表示された情報だけでなく、当該船舶の周囲の状況等にも注視しなければならないため、表示される情報は、燃費向上という目的に応じて操縦上の負担を軽減したシンプルな表示が求められる。
従って、本発明は上述の問題点に鑑みてなされたものであり、その目的は、燃費向上を達成し、操縦者の操縦上の負担を大幅に軽減することができる船舶運航支援装置を提供することにある。
【課題を解決するための手段】
【0008】
上記問題を解決するため、本発明の請求項1に係る船舶運航支援装置は、入力手段と、記憶手段を備えた制御手段と、表示手段とを有し、
位置情報認識手段に通信可能に接続され、
前記制御手段は、前記入力手段によって入力される船舶の航行情報と、前記記憶手段に予め記憶された海象情報のうち、前記航行情報に関連する海象情報と、前記位置情報認識手段によって取得される航行中の前記船舶の位置情報とから、前記航行情報に基づく前記船舶の航行中の少なくとも主機関の推奨回転数情報を有する燃費情報を作成すると共に、該制御手段に通信可能に接続された前記船舶の主機関の回転計から航行中の前記船舶の主機関の実回転数情報を取得する手段であり、
前記表示手段は、前記船舶に設置され、前記推奨回転数情報と、前記実回転数情報とを操縦者に認識可能に表示する手段であることを特徴としている。
【0009】
また、本発明の請求項2に係る船舶運航支援装置は、請求項1に記載の船舶運航支援装置において、前記制御手段は、所定時間毎に前記位置情報認識手段から取得した前記位置情報に基づいて前記燃費情報を再作成することを特徴としている。
また、本発明の請求項3に係る船舶運航支援装置は、請求項1又は2に記載の船舶運航支援装置において、前記制御手段が、該制御手段に通信可能に接続された前記船舶の燃料流量計から取得した航行中の前記船舶の燃料流量情報に基づいて作成した前記燃費情報を前記表示手段が操縦者に認識可能に表示することを特徴としている。
【発明の効果】
【0010】
本発明によれば、燃費向上を達成し、操縦者の操縦上の負担を大幅に軽減することができる船舶運航支援装置を提供することができる。
【図面の簡単な説明】
【0011】
【図1】本発明に係る船舶運航支援装置の構成を示すブロック図である。
【図2】本発明に係る船舶運航支援装置の概要を示すフローチャートである。
【図3】本発明に係る船舶運航支援装置の具体的な情報のやりとりを示すフローチャートである。
【図4】本発明に係る船舶運航支援装置が実行する船舶燃費表示方法によって表示される画面情報のうち、総合メニュー情報画面(初期画面)を示す図である。
【図5】本発明に係る船舶運航支援装置が実行する船舶燃費表示方法によって表示される画面情報のうち、航行情報を入力する画面を示す図である。
【図6】本発明に係る船舶運航支援装置が実行する船舶燃費表示方法によって表示される画面情報のうち、航行情報を入力する画面を示す図である。
【図7】本発明に係る船舶運航支援装置が実行する船舶燃費表示方法によって表示される画面情報のうち、燃費情報を表示する画面を示す図である。
【図8】本発明に係る船舶運航支援装置が実行する船舶燃費表示方法によって表示される画面情報のうち、航行中に表示される画面を示す図である。
【図9】本発明に係る船舶運航支援装置が実行する船舶燃費表示方法によって表示される画面情報のうち、航行終了後の結果御を表示する画面を示す図である。
【発明を実施するための形態】
【0012】
以下、本発明に係る船舶運航支援装置の一実施形態について、図面を参照して説明する。
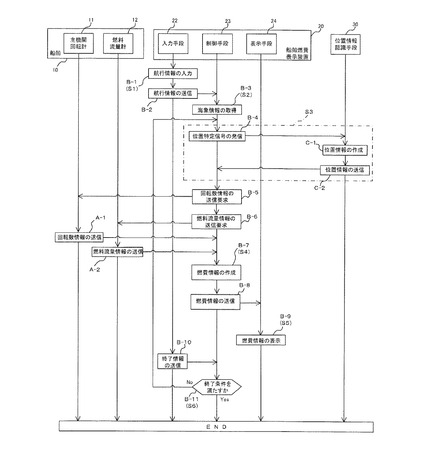
図1は、本発明に係る船舶運航支援装置の構成を示すブロック図である。また、図2は、本発明に係る船舶運航支援装置の概要を示すフローチャートである。また、図3は、本発明に係る船舶運航支援装置の具体的な情報のやりとりを示すフローチャートである。図2及び図3に示すプロセスは、図1に示すコンピュータなどのハードウェア資源を用いて実施されるものである。
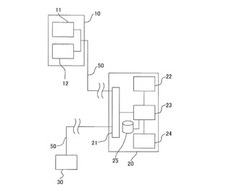
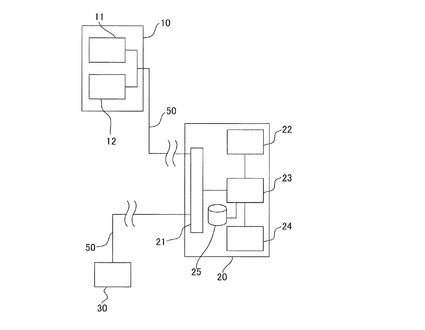
図1に示すように、本発明に係る船舶運航支援装置20は、船舶10と、位置情報認識手段30と共に、通信回線50を介して互いにデータ通信可能に接続されてなる。
【0013】
<船舶>
船舶10は、本実施形態の船舶運航支援装置20が設置され、本実施形態における燃費の対象となるものである。本実施形態では、船舶10に設置され、当該船舶の航行中の主機関(エンジン)の回転数を検知する主機関回転計11と、当該船舶の航行中の燃料の流量を計測する燃料流量計12とについて説明する。
【0014】
主機関回転計11及び燃料流量計12は、船舶運航支援装置20(後述する制御手段23)に通信回線50で通信可能に接続されている。そして、主機関回転計11は、通信回線50を介した船舶運航支援装置20の要求に応じて、要求時点の「主機関の回転数情報(以下、回転数情報と呼ぶ。)」を船舶運航支援装置20に送信する機能を有している。同様に、燃料流量計12は、通信回線50を介した船舶運航支援装置20の要求に応じて、要求時点の燃料の「流量情報(以下、燃料流量情報と呼ぶ。)」を船舶運航支援装置20に送信する機能を有している。これら回転数情報及び燃料流量情報は、船舶10内の制御手段(図示せず)によって取得され、船舶運航支援装置20に送信される構成とされてもよい。通信回線50は、有線でも無線でもよい。
【0015】
<船舶運航支援装置>
船舶運航支援装置20は、受付手段21と、入力手段22と、制御手段23と、表示手段24とを有する。
[受付手段]
受付手段21は、通信回線50と、入力手段22、制御手段23、及び表示手段24とに通信可能に接続されている。受付手段21は、通信回線50を介して船舶運航支援装置20に接続された船舶10及び位置情報認識手段30から送信された情報を受信する機能、並びに制御手段23の要求に従って、船舶10及び位置情報認識手段30に情報を送信する機能を備えている。
[入力手段]
入力手段22は、作業者によって入力される航行情報を制御手段23に送信する機能を有する手段である。入力手段22の具体例としては、キーボードなどの入力端末などの入力端末が挙げられる。
【0016】
[制御手段]
制御手段23は、受付手段21を介して船舶10及び位置情報認識手段30から送信された情報を処理する手段であり、特に、後述する「燃費情報作成工程」、「燃費情報表示工程」、及び「判別工程」を行う手段である。制御手段23には、船舶10及び位置情報認識手段30から送信された情報、及び制御手段23によって作成された情報を記憶すると共に、「海象情報」が予め更新可能に記憶された記憶手段25が接続されている。この記憶手段25には、各港間の航海距離データ、又は各港と各海峡との航海距離データ、船舶情報を船舶名毎にまとめたデータ、「海象情報」としての海峡潮流データ、港間距離データ、主機関の回転数(馬力)と速力との変換テーブルデータ、排水量による速力の影響度テーブルデータなどが記憶されている。
【0017】
[表示手段]
表示手段24は、制御手段23が作成した燃費情報を、制御手段23から受信したことを契機として表示する手段である。表示手段24は、船舶10の操舵室における操縦者が視認可能な位置に設置されている。表示手段24の具体例としては、ディスプレイモニター等が挙げられる。
ここで、表示手段24は制御手段23と無線通信可能に接続されてもよく、船舶運航支援装置20を構成する各手段のうち、表示手段24は少なくとも船舶10に設置される。すなわち、制御手段23と無線通信可能に接続された表示手段24が船舶10内の操縦者が視認可能な場所に設置され、船舶運航支援装置20を構成する表示手段24以外の手段が船舶10外に設置されてもよい。
【0018】
<位置情報認識手段>
位置情報認識手段30は、船舶10に設置された船舶運航支援装置20から発信された位置特定信号を受信することによって、当該船舶10の位置を特定した位置情報を作成し、その位置情報を船舶運航支援装置20に提供する手段である。位置情報認識手段30の具体例としては、GPS装置(Global Positioning System:衛星航法装置)が挙げられる。
【0019】
<船舶燃費表示方法>
次に、図2〜図9を参照して、本実施形態の船舶運航支援装置が実行する船舶燃費表示方法について説明する。ここで、図4は、本実施形態の船舶運航支援装置が実行する船舶燃費表示方法によって表示される画面情報のうち、総合メニュー情報画面(初期画面)を示す図である。また、図5は、本実施形態の船舶運航支援装置が実行する船舶燃費表示方法によって表示される画面情報のうち、航行情報を入力する画面を示す図である。また、図6は、本実施形態の船舶運航支援装置が実行する船舶燃費表示方法によって表示される画面情報のうち、航行情報を入力する画面を示す図である。また、図7は、本実施形態の船舶運航支援装置が実行する船舶燃費表示方法によって表示される画面情報のうち、燃費情報を表示する画面を示す図である。また、図8は、本実施形態の船舶運航支援装置が実行する船舶燃費表示方法によって表示される画面情報のうち、航行中に表示される画面を示す図である。また、図9は、本実施形態の船舶運航支援装置が実行する船舶燃費表示方法によって表示される画面情報のうち、航行終了後の結果御を表示する画面を示す図である。なお、図4〜図9に示す画面情報は、表示手段24に表示される画面情報である。
【0020】
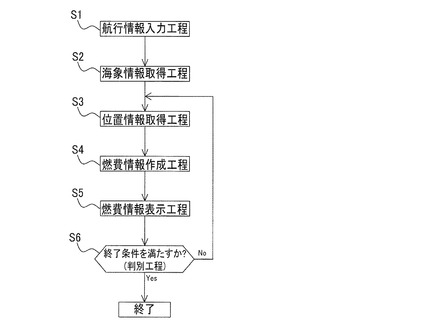
船舶燃費表示方法は、図2に示すように、少なくとも航行情報入力工程(S1)と、海象情報取得工程(S2)と、位置情報取得工程(S3)と、燃費情報作成工程(S4)と、燃費情報表示工程(S5)と、判別工程(S6)とを含む。これらの工程のうち、判別工程(S6)は必須の工程ではなく、必要に応じて含まれる。
【0021】
<航行情報入力工程>
まず、図3に示すように、作業者によって、入力手段22から航行情報が入力される(B1)。この工程が航行情報入力工程(S1)である。
[航行情報]
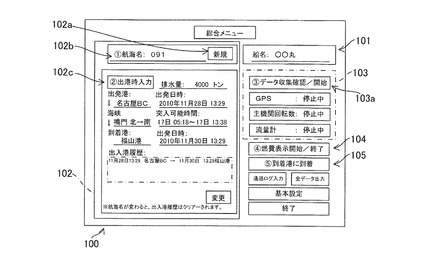
航行情報は、「船舶情報」と「航程情報」とを含む情報であり、図4の画面100のように表示される。
[船舶情報]
「船舶情報」は船舶10自体の仕様を示す情報であり、図4の画面100中、項目101のように船名が表示される。なお、図示はしないが、この項目101を作業者が入力手段22によって選択することで詳細が画面表示される。
【0022】
[航程情報]
「航程情報」は、船舶10によって航行する航程に関する情報であり、図4の画面100中、項目102のように表示される。「航程情報」としては、図4の画面100に示すように、例えば、「出発予定地(港)」、「出発予定日時」、「到着予定地(港)」、「到着予定日時」、「排水量(積みトン)」、「海峡通過の有無」が挙げられる。
「航行情報」を構成する「船舶情報」及び「航程情報」のうち、「船舶情報」は、作業者が入力手段22を用いて「船名」を入力することによって、入力手段22によって制御手段23に送信される船名情報に基づき、制御手段23が記憶手段25に予め記憶された複数の船舶情報から特定されて読み出される。一方、「航程情報」は、入力手段22によって制御手段23に送信される(B2)。
【0023】
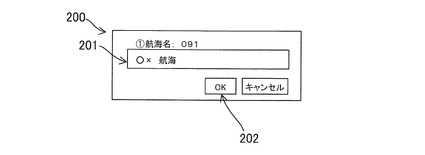
具体的には、まず、図4の「新規」ボタン102aを作業者が入力手段22を用いて選択すると、図5の画面200が表示手段24に表示される。図5の画面200において、「航行情報の名称」を入力欄201に作業者が入力手段22を用いて入力し、「OK」ボタン202を選択する。入力手段22によって「OK」ボタン202が選択されたことを受信した制御手段23は、「航行情報の名称」は、図4の「航海名」欄102bに反映させて再び図4の画面を表示するように表示手段24に命令する。
【0024】
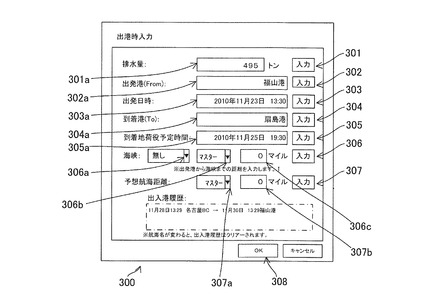
次に、図4の「出港時入力」ボタン102cを作業者が入力手段22を用いて選択すると、図6の画面300が表示手段24に表示される。そして、図6の画面300に表された各欄に作業者が入力手段22を用いて入力して、「航程情報」を確定する。「航程情報」のうち、排水量の入力については、「排水量301a」欄に、空載時の排水量と積みトン数とを合した重量を入力し、「OK」ボタン301を選択することによって確定する。また、出発(予定)港の入力については、「出発(予定)港302a」欄に、出発(予定)港情報を入力し、「OK」ボタン302を選択することによって確定する。また、出発(予定)日時の入力については、「出発(予定)日時303a」欄に、出発(予定)日時情報を入力し、「OK」ボタン303を選択することによって確定する。また、到着(予定)港の入力については、「到着(予定)港304a」欄に、到着(予定)港情報を入力し、「OK」ボタン304を選択することによって確定する。また、到着(予定)日時の入力については、「到着(予定)日時305a」欄に、到着(予定)日時情報を入力し、「OK」ボタン305を選択することによって確定する。また、海峡通過の有無の入力については、「海峡通過の有無306a」欄のプルダウンリスト画面から「海峡名」又は「無し」を選択し、「OK」ボタン306を選択することによって確定する。なお、「海峡通過の有無306a」欄のプルダウンリスト画面の「海峡名」としては、例えば、「鳴門 北→南」、「関門 西→東」のように、特定の海峡についてどの方角からどの方角へ航行するのかを特定できるように選択肢が用意されている。
【0025】
次に、作業者が入力手段22を用いて、「海峡通過の有無306a」欄のプルダウンリスト画面の「海峡名」を確定させ、プルダウンリスト画面306bにおいて、「マスター」、「前回距離」、「平均距離」、又は「前回設定」を選択することにより、「出発(予定)港」から当該海峡までの航行距離が「航行距離表示欄306c」に表示される。
ここで、プルダウンリスト画面306bにおいて、作業者が入力手段22を用いて「マスター」を選択すると、その信号を受信した制御手段23は、マスターデータベースに既に記憶された、過去の当該出発港(「出発(予定)港302a」欄に入力された港)と、当該海峡(「海峡通過の有無306a」欄のプルダウンリスト画面で選択された「海峡名」の海峡)との航海距離データを参照して、「航行距離表示欄306c」に表示する。
【0026】
また、プルダウンリスト画面306bにおいて、作業者が入力手段22を用いて「前回距離」を選択すると、その信号を受信した制御手段23は、記憶手段25に既に記憶された、前回の当該出発港(「出発(予定)港302a」欄に入力された港)と、当該海峡(「海峡通過の有無306a」欄のプルダウンリスト画面で選択された「海峡名」の海峡)との実測の航海距離データを参照して、「航行距離表示欄306c」に表示する。
【0027】
また、プルダウンリスト画面306bにおいて、作業者が入力手段22を用いて「平均距離」を選択すると、その信号を受信した制御手段23は、記憶手段25に既に記憶された、過去の当該出発港(「出発(予定)港302a」欄に入力された港)と、当該海峡(「海峡通過の有無306a」欄のプルダウンリスト画面で選択された「海峡名」の海峡)との航海距離データを参照して、その平均航海距離を演算して、「航行距離表示欄306c」に表示する。
【0028】
また、プルダウンリスト画面306bにおいて、作業者が入力手段22を用いて「前回設定」を選択すると、その信号を受信した制御手段23は、記憶手段25に既に記憶された、前回の当該出発港(「出発(予定)港302a」欄に入力された港)と、当該海峡(「海峡通過の有無306a」欄のプルダウンリスト画面で選択された「海峡名」の海峡)との航海距離データを参照して、「航行距離表示欄306c」に表示する。
なお、図6では、「海峡通過の有無306a」欄のプルダウンリスト画面を「無し」としているので、「航行距離表示欄306c」は「0」と表示されている。
【0029】
また、作業者が入力手段22を用いて、「出発(予定)港情報」及び「到着(予定)港情報」を確定させ、プルダウンリスト画面307aにおいて、「マスター」、「前回距離」、「平均距離」、又は「前回設定」を選択することにより、「出発(予定)港」から「到着(予定)港」までの航行距離が「航行距離表示欄307b」に表示される。
ここで、プルダウンリスト画面307aにおいて、作業者が入力手段22を用いて「マスター」を選択すると、その信号を受信した制御手段23は、マスターデータベースに既に記憶された、過去の当該出発港(「出発(予定)港302a」欄に入力された港)と、当該到着港(「到着(予定)港304a」の欄に入力された港)との航海距離データを参照して、「航行距離表示欄307b」に表示する。
【0030】
また、プルダウンリスト画面307aにおいて、作業者が入力手段22を用いて「前回距離」を選択すると、その信号を受信した制御手段23は、記憶手段25に既に記憶された、過去の当該出発港(「出発(予定)港302a」欄に入力された港)と、当該到着港(「到着(予定)港304a」の欄に入力された港)との実測の航海距離データを参照して、「航行距離表示欄306c」に表示する。
【0031】
また、プルダウンリスト画面307aにおいて、作業者が入力手段22を用いて「平均距離」を選択すると、その信号を受信した制御手段23は、記憶手段25に既に記憶された、過去の当該出発港(「出発(予定)港302a」欄に入力された港)と、当該到着港(「到着(予定)港304a」の欄に入力された港)との航海距離データを参照して、その平均航海距離を演算して、「航行距離表示欄307b」に表示する。
【0032】
また、プルダウンリスト画面307aにおいて、作業者が入力手段22を用いて「前回設定」を選択すると、その信号を受信した制御手段23は、記憶手段25に既に記憶された、前回の当該出発港(「出発(予定)港302a」欄に入力された港)と、当該到着港(「到着(予定)港304a」の欄に入力された港)との航海距離データを参照して、「航行距離表示欄307b」に表示する。
これらの情報は、「OK」ボタン308を作業者が入力手段22を用いて選択することを契機として、同情報が制御手段23に送信され、記憶手段25に一時的に記憶される。
【0033】
<海象情報取得工程>
制御手段23は、航行情報を受信したことを契機として、受信した航行情報に該当する「海象情報」を記憶手段25から取得する(B-3)。この工程が海象情報取得工程(S2)である。
ここで、「海象情報」とは、船舶10の航路上における外乱要件である。具体的には、「海流データ」、「水面波データ」、「潮汐データ」、「海峡潮流データ」、及び「海峡通過条件データ」等の情報が挙げられる。
【0034】
<位置情報取得工程>
次に、制御手段23は、船舶10の位置情報を取得する。位置情報は、制御手段23が、位置情報認識手段30に対して位置特定信号を発信し(B-4)、その位置特定信号を受信した位置情報認識手段30が作成する(C-1)ことによって得られる。得られた位置情報は、位置情報認識手段30から制御手段23に送信される(C-2)。これら一連のやりとり(B-4,C-1,C-2)が位置情報取得工程(S3)である。この位置情報は、位置情報認識手段30が制御手段23から位置特定信号を受信した時刻における船舶10の位置を緯度及び経度で示した情報である。位置情報取得工程は、後述するように、所定時間毎の船舶10の位置情報を制御手段23が取得する情報である。この「位置特定信号の発信」は、図4の「データ収集確認/開始」ボタン103aを作業者が入力手段22を用いて選択し、その信号が制御手段に送信されたことを契機に行われ、得られた「位置情報の状況」は、図4のデータ確認欄103に表示される。
ここで、船舶10が出港する前での位置情報の取得は、出港前の船舶10の現在位置情報と「出発予定地(港)」の位置情報とを一致させるゼロ調整を兼ねる目的等で実行される。
【0035】
<回転数情報及び燃料流量情報の取得>
その後、制御手段23は、船舶10から「回転数情報」及び「燃料流量情報」を取得する。回転数情報は、制御手段23が船舶10に対して回転数情報の送信要求を行う(B-5)ことによって、主機関回転計11が検出し、船舶10(主機関回転計11)が制御手段23に対して送信する(A-1)ことで得られる。また、燃料流量情報は、制御手段23が船舶10に対して燃料流量情報の送信要求を行う(B-6)ことによって、燃料流量計12が検出し、船舶10(燃料流量計12)が制御手段23に対して送信する(A-2)ことで得られる。これら「回転数情報の送信要求」及び「燃料流量情報の送信要求」は、図4の「データ収集確認/開始」ボタン103aを作業者が入力手段22を用いて選択し、その信号が制御手段に送信されたことを契機に行われ、得られた「回転数情報」及び「燃料流量情報」の各状況は、図4のデータ確認欄103に表示される。
【0036】
<燃費情報作成工程>
次に、制御手段23は、B-2で得た「航行情報」と、B-3で得た「海象情報」と、C-2で得た「位置情報」とに基づいて図7に示す燃費情報を作成する(B-7)。この工程が燃費情報作成工程(S4)である。
燃費情報作成工程は、例えば、以下のようにして行われる。
まず、制御手段23は、B-2で得た「航程情報」に含まれる「出発予定地(港)」及び「到着予定地(港)」に関連する「港間距離データ」を記憶手段25から読み出す。
【0037】
次に、制御手段23は、B-2で得た「航程情報」に含まれる「出発予定地(港)」及び「到着予定地(港)」に関連する「海流データ」、「水面波データ」、及び「潮汐データ」を記憶手段25から読み出す。
次に、制御手段23は、B-2で得た「航程情報」に含まれる「海峡通過の有無」を参照し、「海峡通過有り」であれば、その海峡に関連する「海峡潮流データ」及び「海峡通過条件データ」を記憶手段25から読み出す。
【0038】
そして、制御手段23は、記憶手段25から読み出した「港間距離データ」と、「海流データ」、「水面波データ」、及び「潮汐データ」と、必要に応じて「海峡潮流データ」及び「海峡通過条件データ」と、B-2で得た「航程情報」に含まれる「出発予定時刻」から「到着予定時刻」までの時間とから当該船舶10に要求される船速を算出する。
その後、制御手段23は、この算出された船速と、記憶手段25に記憶された「主機関の回転数(馬力)と速力との変換テーブルデータ」、及び「排水量による速力の影響度テーブルデータ」とから「主機関の推奨回転数(以下、推奨回転数と呼ぶ。)」を算出する。
【0039】
なお、船舶10が航行中においては、記憶手段25に記憶された「港間距離データ」と、C-2で得た「位置情報」とに基づいて、到着予定地(港)までの残距離を算出する。その後、制御手段23は、この残距離と、現在時刻から到着予定時刻までの時間とから当該船舶10に要求される船速を算出する。そして、制御手段23は、この算出された船速と、記憶手段25に記憶された「主機関の回転数(馬力)と速力との変換テーブルデータ」、及び「排水量による速力の影響度テーブルデータ」とから「推奨回転数」を算出する。
【0040】
[燃費情報]
制御手段23によって作成される「燃費情報」は、少なくとも「推奨回転数」、及び「主機関の実回転数」を含む情報である。「燃費情報」は、この「推奨回転数」以外に、「実燃費」、「実船速」といった、船舶10のリアルタイムな情報も含まれる。ここで、「主機関の実回転数」は、上記A-1で制御手段23が取得する情報である。また、制御手段23によって作成される「燃費情報」には、前記「推奨回転数」によって船舶10を航行した場合の燃費情報として算出される「推奨燃費」も含まれる。この「推奨燃費」は、上記「推奨回転数」と「船舶情報」、「航程情報」及び「海象情報」とから導出される情報である。また、「実燃費」は、燃料流量計12から送信される「燃料流量情報」から導出される情報である。また、「実船速」は、「航程情報」及び「位置情報」によって導出される情報である。
【0041】
<燃費情報表示工程>
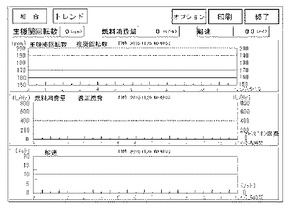
次に、制御手段23は、作業者が入力手段22を用いて図4の「燃費表示開始/終了」ボタン104を選択したことを契機に、燃費情報作成工程で作成された燃費情報を表示手段24に対して送信し(B-8)、当該燃費情報を表示手段24に表示要求する。燃費情報を制御手段23から受信した表示手段24は、その燃費情報のうち、図8に示すように、少なくとも「推奨回転数」と「主機関の実回転数(「主機関回転数」と表示)」とをトレンドグラフの態様で対比して船舶10の操縦者に対して表示する(B-9)。なお、図8は、出航前の状態の船舶に関する画面であるので、「推奨回転数」及び「主機関の実回転数」はまだ表示されていない。この工程が燃費情報表示工程(S5)である。このように、少なくとも「推奨回転数」と「主機関の実回転数」とが、航行中の船舶の操縦者にリアルタイムに視認されることによって、適正燃費を達成し、操縦者の操縦上の負担を大幅に軽減することができる船舶運航支援装置を提供することができる。
【0042】
そして、当該船舶10が到着予定港に到着した際、作業者が入力手段22を用いて図4の「到着港に到着」ボタン105を選択したことを契機に、実行された航行(図4の航海名102bの航行)における燃費情報に対応する実情報(航行距離、航行時間、実回転数の履歴、実燃費など)が確定する。
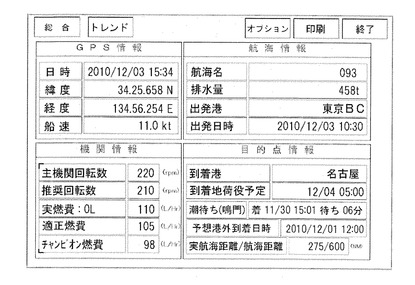
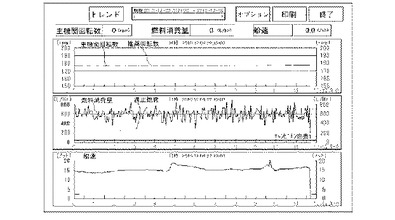
ここで、燃費情報表示工程(S5)においては、表示手段24が、制御手段23から受信した燃費情報のうち、「推奨回転数」及び「主機関の実回転数」に加えて、図9に示すように、「推奨燃費」及び「実燃費」をトレンドグラフの態様で対比して船舶10の操縦者に対して表示してもよい。この「推奨燃費」が当該船舶10の航行計画の目標としていた「適正燃費」以下であれば、燃費の低減化の目的も達成したことになる。なお、図9に示す「推奨燃費」及び「実燃費」は、説明の便宜上、引き出し線を用いて特定しているが、実際には、色違いで表示されることが好ましい。
【0043】
<判別工程>
その後、制御手段23は、判別工程(S6)を実行する。
判別工程(S6)は、船舶10の状態が燃費表示の終了条件を満たすか否かを制御手段23が判別する工程である。終了条件としては、C-2で送信された位置情報が、直前にB-7(S4)で作成された燃費情報における「到着予定地(港)」に一致する場合や、入力手段22に「終了情報」が入力されたことを契機に入力手段22から終了情報が送信される場合(B-10)などが挙げられる。「終了情報の送信」の例としては、作業者による燃費表示を中断する指示ボタンの押下を入力手段22が検知する動作等が挙げられる。
【0044】
この工程において、終了条件が満たされた場合(B-11−Yes)、本実施形態における船舶燃料表示方法は終了する。一方、この工程において、終了条件が満たされなかった場合(B-11−No)、制御手段23は、再び位置情報認識手段30に対して位置特定信号を発信し(B-4)、B-11にて終了条件が満たされる(B-11−Yes)まで位置情報取得工程(S3)、燃費情報作成工程(S4)、燃費情報表示工程(S5)、及び判別工程(S6)を繰り返す。すなわち、判別工程(S6)において終了条件を満たさない間は、燃費情報作成工程(S4)によって船舶10自身の現在位置を再度把握し、この現在位置に基づいて燃費情報表示工程(S5)及び判別工程(S6)が実行される。
【0045】
以上説明したように、本実施形態の船舶運航支援装置によれば、燃費情報として、操縦者に推奨回転数を表示するので、操縦者は、その推奨回転数を維持することに努めればよく、燃費向上を達成し、操縦上の負担を大幅に軽減することができる。
以上、本発明の実施の形態について説明してきたが、本発明はこれに限定されずに、種々の変更、改良を行うことができる。例えば、前記航行情報及び前記燃費情報を含む運航データを記憶媒体に保存し、当該記憶媒体に保存された運航データを陸上の端末で読み出して、船舶運航支援装置を搭載した当該船舶の省エネ運航評価を行うことも可能である。
【符号の説明】
【0046】
10 船舶
20 船舶運航支援装置
30 位置情報認識手段
【技術分野】
【0001】
本発明は、船舶の運航を支援する船舶運航支援装置に関し、特に、最適な燃費による航行を支援する船舶運航支援装置に関する。
【背景技術】
【0002】
従来より、船舶の航行において、航海情報(自船位置、船速、方位等)を航行支援に用いて、船舶の運航の省力化や、目的港への到着時刻の定時性や、燃費を向上させる技術が特許文献1〜3に開示されている。
特許文献1に記載された発明は、航行位置情報により決定航路の設定船速が計算される。さらに設定船速は主機関の回転数設定信号に変換され、主機関の制御系統の制御演算回路に印加される。このような構成によって、従来独立して行われてきた操舵制御と主機関の制御とを統括し、安全性確保やエネルギー効率を最適化し、船舶の運航の省力化を実現できるとしている。
【0003】
また、特許文献2に記載された発明は、航路に沿う上記船舶の通過予定海域の気象海象予報を順次受信する気象海象予報受信手段と、同気象海象予報受信手段により受信された気象海象予報に基づき上記船舶の主機関の出力制御および操舵装置による舵角制御を順次行う。すなわち、出発港から目的港までの航路に沿う所要数の通過点ごとに同船舶の通過予定時刻を統計処理により補正して許容誤差内に納めることにより、目的港への到着時刻の定時性を維持できる効果を奏するとしている。
【0004】
また、特許文献3に記載された発明は、就航情報、海象状況、速力状況、馬力状況、燃費状況、主機関の回転数状況等のデータを得られ、就航状況を確認できる。また、実海域性能推定・評価のデータとして、シーマージン解析、船速低下解析、平均燃料消費率解析、モード解析等のデータが得られ、これらのデータは契約速力、バンカー契約の採算計算に活用することができる。すなわち、実海域での船体性能を精度よく推定して、実運航にフィードバックすることで、燃費を向上し、CO2排出量の削減し、到着予定時刻の精度を向上し、効果的な修繕計画を立てることができるという効果を奏する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開昭62−279195号公報
【特許文献2】特開2007−45338号公報
【特許文献3】特開2009−286230号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、特許文献1及び特許文献2に記載された発明は、当該船舶の主機関を直接制御するものであり、最適な燃費による航行を支援するものではない。
また、特許文献3に記載された発明は、就航解析をおこなった結果、対象船舶に関する各種データを収集及び蓄積し、対象船舶におけるデータ統計解析、実海域性能の推定と評価、船舶の性能の悪化の要因分析等を行うにすぎない。
【0007】
すなわち、船舶を航行中の操縦者は、自身の経験や勘から表示された情報を分析して操縦することには変わりなく、操縦者の操縦上の負担は依然として軽減されていない。特に、船舶の出力及び燃費は、当該船舶の速力の3乗に比例するため、モニタ(支援装置)に表示された速力を分析して操縦することは操縦者の負担軽減に寄与するものではない。また、船舶の航行中、操縦者は、表示された情報だけでなく、当該船舶の周囲の状況等にも注視しなければならないため、表示される情報は、燃費向上という目的に応じて操縦上の負担を軽減したシンプルな表示が求められる。
従って、本発明は上述の問題点に鑑みてなされたものであり、その目的は、燃費向上を達成し、操縦者の操縦上の負担を大幅に軽減することができる船舶運航支援装置を提供することにある。
【課題を解決するための手段】
【0008】
上記問題を解決するため、本発明の請求項1に係る船舶運航支援装置は、入力手段と、記憶手段を備えた制御手段と、表示手段とを有し、
位置情報認識手段に通信可能に接続され、
前記制御手段は、前記入力手段によって入力される船舶の航行情報と、前記記憶手段に予め記憶された海象情報のうち、前記航行情報に関連する海象情報と、前記位置情報認識手段によって取得される航行中の前記船舶の位置情報とから、前記航行情報に基づく前記船舶の航行中の少なくとも主機関の推奨回転数情報を有する燃費情報を作成すると共に、該制御手段に通信可能に接続された前記船舶の主機関の回転計から航行中の前記船舶の主機関の実回転数情報を取得する手段であり、
前記表示手段は、前記船舶に設置され、前記推奨回転数情報と、前記実回転数情報とを操縦者に認識可能に表示する手段であることを特徴としている。
【0009】
また、本発明の請求項2に係る船舶運航支援装置は、請求項1に記載の船舶運航支援装置において、前記制御手段は、所定時間毎に前記位置情報認識手段から取得した前記位置情報に基づいて前記燃費情報を再作成することを特徴としている。
また、本発明の請求項3に係る船舶運航支援装置は、請求項1又は2に記載の船舶運航支援装置において、前記制御手段が、該制御手段に通信可能に接続された前記船舶の燃料流量計から取得した航行中の前記船舶の燃料流量情報に基づいて作成した前記燃費情報を前記表示手段が操縦者に認識可能に表示することを特徴としている。
【発明の効果】
【0010】
本発明によれば、燃費向上を達成し、操縦者の操縦上の負担を大幅に軽減することができる船舶運航支援装置を提供することができる。
【図面の簡単な説明】
【0011】
【図1】本発明に係る船舶運航支援装置の構成を示すブロック図である。
【図2】本発明に係る船舶運航支援装置の概要を示すフローチャートである。
【図3】本発明に係る船舶運航支援装置の具体的な情報のやりとりを示すフローチャートである。
【図4】本発明に係る船舶運航支援装置が実行する船舶燃費表示方法によって表示される画面情報のうち、総合メニュー情報画面(初期画面)を示す図である。
【図5】本発明に係る船舶運航支援装置が実行する船舶燃費表示方法によって表示される画面情報のうち、航行情報を入力する画面を示す図である。
【図6】本発明に係る船舶運航支援装置が実行する船舶燃費表示方法によって表示される画面情報のうち、航行情報を入力する画面を示す図である。
【図7】本発明に係る船舶運航支援装置が実行する船舶燃費表示方法によって表示される画面情報のうち、燃費情報を表示する画面を示す図である。
【図8】本発明に係る船舶運航支援装置が実行する船舶燃費表示方法によって表示される画面情報のうち、航行中に表示される画面を示す図である。
【図9】本発明に係る船舶運航支援装置が実行する船舶燃費表示方法によって表示される画面情報のうち、航行終了後の結果御を表示する画面を示す図である。
【発明を実施するための形態】
【0012】
以下、本発明に係る船舶運航支援装置の一実施形態について、図面を参照して説明する。
図1は、本発明に係る船舶運航支援装置の構成を示すブロック図である。また、図2は、本発明に係る船舶運航支援装置の概要を示すフローチャートである。また、図3は、本発明に係る船舶運航支援装置の具体的な情報のやりとりを示すフローチャートである。図2及び図3に示すプロセスは、図1に示すコンピュータなどのハードウェア資源を用いて実施されるものである。
図1に示すように、本発明に係る船舶運航支援装置20は、船舶10と、位置情報認識手段30と共に、通信回線50を介して互いにデータ通信可能に接続されてなる。
【0013】
<船舶>
船舶10は、本実施形態の船舶運航支援装置20が設置され、本実施形態における燃費の対象となるものである。本実施形態では、船舶10に設置され、当該船舶の航行中の主機関(エンジン)の回転数を検知する主機関回転計11と、当該船舶の航行中の燃料の流量を計測する燃料流量計12とについて説明する。
【0014】
主機関回転計11及び燃料流量計12は、船舶運航支援装置20(後述する制御手段23)に通信回線50で通信可能に接続されている。そして、主機関回転計11は、通信回線50を介した船舶運航支援装置20の要求に応じて、要求時点の「主機関の回転数情報(以下、回転数情報と呼ぶ。)」を船舶運航支援装置20に送信する機能を有している。同様に、燃料流量計12は、通信回線50を介した船舶運航支援装置20の要求に応じて、要求時点の燃料の「流量情報(以下、燃料流量情報と呼ぶ。)」を船舶運航支援装置20に送信する機能を有している。これら回転数情報及び燃料流量情報は、船舶10内の制御手段(図示せず)によって取得され、船舶運航支援装置20に送信される構成とされてもよい。通信回線50は、有線でも無線でもよい。
【0015】
<船舶運航支援装置>
船舶運航支援装置20は、受付手段21と、入力手段22と、制御手段23と、表示手段24とを有する。
[受付手段]
受付手段21は、通信回線50と、入力手段22、制御手段23、及び表示手段24とに通信可能に接続されている。受付手段21は、通信回線50を介して船舶運航支援装置20に接続された船舶10及び位置情報認識手段30から送信された情報を受信する機能、並びに制御手段23の要求に従って、船舶10及び位置情報認識手段30に情報を送信する機能を備えている。
[入力手段]
入力手段22は、作業者によって入力される航行情報を制御手段23に送信する機能を有する手段である。入力手段22の具体例としては、キーボードなどの入力端末などの入力端末が挙げられる。
【0016】
[制御手段]
制御手段23は、受付手段21を介して船舶10及び位置情報認識手段30から送信された情報を処理する手段であり、特に、後述する「燃費情報作成工程」、「燃費情報表示工程」、及び「判別工程」を行う手段である。制御手段23には、船舶10及び位置情報認識手段30から送信された情報、及び制御手段23によって作成された情報を記憶すると共に、「海象情報」が予め更新可能に記憶された記憶手段25が接続されている。この記憶手段25には、各港間の航海距離データ、又は各港と各海峡との航海距離データ、船舶情報を船舶名毎にまとめたデータ、「海象情報」としての海峡潮流データ、港間距離データ、主機関の回転数(馬力)と速力との変換テーブルデータ、排水量による速力の影響度テーブルデータなどが記憶されている。
【0017】
[表示手段]
表示手段24は、制御手段23が作成した燃費情報を、制御手段23から受信したことを契機として表示する手段である。表示手段24は、船舶10の操舵室における操縦者が視認可能な位置に設置されている。表示手段24の具体例としては、ディスプレイモニター等が挙げられる。
ここで、表示手段24は制御手段23と無線通信可能に接続されてもよく、船舶運航支援装置20を構成する各手段のうち、表示手段24は少なくとも船舶10に設置される。すなわち、制御手段23と無線通信可能に接続された表示手段24が船舶10内の操縦者が視認可能な場所に設置され、船舶運航支援装置20を構成する表示手段24以外の手段が船舶10外に設置されてもよい。
【0018】
<位置情報認識手段>
位置情報認識手段30は、船舶10に設置された船舶運航支援装置20から発信された位置特定信号を受信することによって、当該船舶10の位置を特定した位置情報を作成し、その位置情報を船舶運航支援装置20に提供する手段である。位置情報認識手段30の具体例としては、GPS装置(Global Positioning System:衛星航法装置)が挙げられる。
【0019】
<船舶燃費表示方法>
次に、図2〜図9を参照して、本実施形態の船舶運航支援装置が実行する船舶燃費表示方法について説明する。ここで、図4は、本実施形態の船舶運航支援装置が実行する船舶燃費表示方法によって表示される画面情報のうち、総合メニュー情報画面(初期画面)を示す図である。また、図5は、本実施形態の船舶運航支援装置が実行する船舶燃費表示方法によって表示される画面情報のうち、航行情報を入力する画面を示す図である。また、図6は、本実施形態の船舶運航支援装置が実行する船舶燃費表示方法によって表示される画面情報のうち、航行情報を入力する画面を示す図である。また、図7は、本実施形態の船舶運航支援装置が実行する船舶燃費表示方法によって表示される画面情報のうち、燃費情報を表示する画面を示す図である。また、図8は、本実施形態の船舶運航支援装置が実行する船舶燃費表示方法によって表示される画面情報のうち、航行中に表示される画面を示す図である。また、図9は、本実施形態の船舶運航支援装置が実行する船舶燃費表示方法によって表示される画面情報のうち、航行終了後の結果御を表示する画面を示す図である。なお、図4〜図9に示す画面情報は、表示手段24に表示される画面情報である。
【0020】
船舶燃費表示方法は、図2に示すように、少なくとも航行情報入力工程(S1)と、海象情報取得工程(S2)と、位置情報取得工程(S3)と、燃費情報作成工程(S4)と、燃費情報表示工程(S5)と、判別工程(S6)とを含む。これらの工程のうち、判別工程(S6)は必須の工程ではなく、必要に応じて含まれる。
【0021】
<航行情報入力工程>
まず、図3に示すように、作業者によって、入力手段22から航行情報が入力される(B1)。この工程が航行情報入力工程(S1)である。
[航行情報]
航行情報は、「船舶情報」と「航程情報」とを含む情報であり、図4の画面100のように表示される。
[船舶情報]
「船舶情報」は船舶10自体の仕様を示す情報であり、図4の画面100中、項目101のように船名が表示される。なお、図示はしないが、この項目101を作業者が入力手段22によって選択することで詳細が画面表示される。
【0022】
[航程情報]
「航程情報」は、船舶10によって航行する航程に関する情報であり、図4の画面100中、項目102のように表示される。「航程情報」としては、図4の画面100に示すように、例えば、「出発予定地(港)」、「出発予定日時」、「到着予定地(港)」、「到着予定日時」、「排水量(積みトン)」、「海峡通過の有無」が挙げられる。
「航行情報」を構成する「船舶情報」及び「航程情報」のうち、「船舶情報」は、作業者が入力手段22を用いて「船名」を入力することによって、入力手段22によって制御手段23に送信される船名情報に基づき、制御手段23が記憶手段25に予め記憶された複数の船舶情報から特定されて読み出される。一方、「航程情報」は、入力手段22によって制御手段23に送信される(B2)。
【0023】
具体的には、まず、図4の「新規」ボタン102aを作業者が入力手段22を用いて選択すると、図5の画面200が表示手段24に表示される。図5の画面200において、「航行情報の名称」を入力欄201に作業者が入力手段22を用いて入力し、「OK」ボタン202を選択する。入力手段22によって「OK」ボタン202が選択されたことを受信した制御手段23は、「航行情報の名称」は、図4の「航海名」欄102bに反映させて再び図4の画面を表示するように表示手段24に命令する。
【0024】
次に、図4の「出港時入力」ボタン102cを作業者が入力手段22を用いて選択すると、図6の画面300が表示手段24に表示される。そして、図6の画面300に表された各欄に作業者が入力手段22を用いて入力して、「航程情報」を確定する。「航程情報」のうち、排水量の入力については、「排水量301a」欄に、空載時の排水量と積みトン数とを合した重量を入力し、「OK」ボタン301を選択することによって確定する。また、出発(予定)港の入力については、「出発(予定)港302a」欄に、出発(予定)港情報を入力し、「OK」ボタン302を選択することによって確定する。また、出発(予定)日時の入力については、「出発(予定)日時303a」欄に、出発(予定)日時情報を入力し、「OK」ボタン303を選択することによって確定する。また、到着(予定)港の入力については、「到着(予定)港304a」欄に、到着(予定)港情報を入力し、「OK」ボタン304を選択することによって確定する。また、到着(予定)日時の入力については、「到着(予定)日時305a」欄に、到着(予定)日時情報を入力し、「OK」ボタン305を選択することによって確定する。また、海峡通過の有無の入力については、「海峡通過の有無306a」欄のプルダウンリスト画面から「海峡名」又は「無し」を選択し、「OK」ボタン306を選択することによって確定する。なお、「海峡通過の有無306a」欄のプルダウンリスト画面の「海峡名」としては、例えば、「鳴門 北→南」、「関門 西→東」のように、特定の海峡についてどの方角からどの方角へ航行するのかを特定できるように選択肢が用意されている。
【0025】
次に、作業者が入力手段22を用いて、「海峡通過の有無306a」欄のプルダウンリスト画面の「海峡名」を確定させ、プルダウンリスト画面306bにおいて、「マスター」、「前回距離」、「平均距離」、又は「前回設定」を選択することにより、「出発(予定)港」から当該海峡までの航行距離が「航行距離表示欄306c」に表示される。
ここで、プルダウンリスト画面306bにおいて、作業者が入力手段22を用いて「マスター」を選択すると、その信号を受信した制御手段23は、マスターデータベースに既に記憶された、過去の当該出発港(「出発(予定)港302a」欄に入力された港)と、当該海峡(「海峡通過の有無306a」欄のプルダウンリスト画面で選択された「海峡名」の海峡)との航海距離データを参照して、「航行距離表示欄306c」に表示する。
【0026】
また、プルダウンリスト画面306bにおいて、作業者が入力手段22を用いて「前回距離」を選択すると、その信号を受信した制御手段23は、記憶手段25に既に記憶された、前回の当該出発港(「出発(予定)港302a」欄に入力された港)と、当該海峡(「海峡通過の有無306a」欄のプルダウンリスト画面で選択された「海峡名」の海峡)との実測の航海距離データを参照して、「航行距離表示欄306c」に表示する。
【0027】
また、プルダウンリスト画面306bにおいて、作業者が入力手段22を用いて「平均距離」を選択すると、その信号を受信した制御手段23は、記憶手段25に既に記憶された、過去の当該出発港(「出発(予定)港302a」欄に入力された港)と、当該海峡(「海峡通過の有無306a」欄のプルダウンリスト画面で選択された「海峡名」の海峡)との航海距離データを参照して、その平均航海距離を演算して、「航行距離表示欄306c」に表示する。
【0028】
また、プルダウンリスト画面306bにおいて、作業者が入力手段22を用いて「前回設定」を選択すると、その信号を受信した制御手段23は、記憶手段25に既に記憶された、前回の当該出発港(「出発(予定)港302a」欄に入力された港)と、当該海峡(「海峡通過の有無306a」欄のプルダウンリスト画面で選択された「海峡名」の海峡)との航海距離データを参照して、「航行距離表示欄306c」に表示する。
なお、図6では、「海峡通過の有無306a」欄のプルダウンリスト画面を「無し」としているので、「航行距離表示欄306c」は「0」と表示されている。
【0029】
また、作業者が入力手段22を用いて、「出発(予定)港情報」及び「到着(予定)港情報」を確定させ、プルダウンリスト画面307aにおいて、「マスター」、「前回距離」、「平均距離」、又は「前回設定」を選択することにより、「出発(予定)港」から「到着(予定)港」までの航行距離が「航行距離表示欄307b」に表示される。
ここで、プルダウンリスト画面307aにおいて、作業者が入力手段22を用いて「マスター」を選択すると、その信号を受信した制御手段23は、マスターデータベースに既に記憶された、過去の当該出発港(「出発(予定)港302a」欄に入力された港)と、当該到着港(「到着(予定)港304a」の欄に入力された港)との航海距離データを参照して、「航行距離表示欄307b」に表示する。
【0030】
また、プルダウンリスト画面307aにおいて、作業者が入力手段22を用いて「前回距離」を選択すると、その信号を受信した制御手段23は、記憶手段25に既に記憶された、過去の当該出発港(「出発(予定)港302a」欄に入力された港)と、当該到着港(「到着(予定)港304a」の欄に入力された港)との実測の航海距離データを参照して、「航行距離表示欄306c」に表示する。
【0031】
また、プルダウンリスト画面307aにおいて、作業者が入力手段22を用いて「平均距離」を選択すると、その信号を受信した制御手段23は、記憶手段25に既に記憶された、過去の当該出発港(「出発(予定)港302a」欄に入力された港)と、当該到着港(「到着(予定)港304a」の欄に入力された港)との航海距離データを参照して、その平均航海距離を演算して、「航行距離表示欄307b」に表示する。
【0032】
また、プルダウンリスト画面307aにおいて、作業者が入力手段22を用いて「前回設定」を選択すると、その信号を受信した制御手段23は、記憶手段25に既に記憶された、前回の当該出発港(「出発(予定)港302a」欄に入力された港)と、当該到着港(「到着(予定)港304a」の欄に入力された港)との航海距離データを参照して、「航行距離表示欄307b」に表示する。
これらの情報は、「OK」ボタン308を作業者が入力手段22を用いて選択することを契機として、同情報が制御手段23に送信され、記憶手段25に一時的に記憶される。
【0033】
<海象情報取得工程>
制御手段23は、航行情報を受信したことを契機として、受信した航行情報に該当する「海象情報」を記憶手段25から取得する(B-3)。この工程が海象情報取得工程(S2)である。
ここで、「海象情報」とは、船舶10の航路上における外乱要件である。具体的には、「海流データ」、「水面波データ」、「潮汐データ」、「海峡潮流データ」、及び「海峡通過条件データ」等の情報が挙げられる。
【0034】
<位置情報取得工程>
次に、制御手段23は、船舶10の位置情報を取得する。位置情報は、制御手段23が、位置情報認識手段30に対して位置特定信号を発信し(B-4)、その位置特定信号を受信した位置情報認識手段30が作成する(C-1)ことによって得られる。得られた位置情報は、位置情報認識手段30から制御手段23に送信される(C-2)。これら一連のやりとり(B-4,C-1,C-2)が位置情報取得工程(S3)である。この位置情報は、位置情報認識手段30が制御手段23から位置特定信号を受信した時刻における船舶10の位置を緯度及び経度で示した情報である。位置情報取得工程は、後述するように、所定時間毎の船舶10の位置情報を制御手段23が取得する情報である。この「位置特定信号の発信」は、図4の「データ収集確認/開始」ボタン103aを作業者が入力手段22を用いて選択し、その信号が制御手段に送信されたことを契機に行われ、得られた「位置情報の状況」は、図4のデータ確認欄103に表示される。
ここで、船舶10が出港する前での位置情報の取得は、出港前の船舶10の現在位置情報と「出発予定地(港)」の位置情報とを一致させるゼロ調整を兼ねる目的等で実行される。
【0035】
<回転数情報及び燃料流量情報の取得>
その後、制御手段23は、船舶10から「回転数情報」及び「燃料流量情報」を取得する。回転数情報は、制御手段23が船舶10に対して回転数情報の送信要求を行う(B-5)ことによって、主機関回転計11が検出し、船舶10(主機関回転計11)が制御手段23に対して送信する(A-1)ことで得られる。また、燃料流量情報は、制御手段23が船舶10に対して燃料流量情報の送信要求を行う(B-6)ことによって、燃料流量計12が検出し、船舶10(燃料流量計12)が制御手段23に対して送信する(A-2)ことで得られる。これら「回転数情報の送信要求」及び「燃料流量情報の送信要求」は、図4の「データ収集確認/開始」ボタン103aを作業者が入力手段22を用いて選択し、その信号が制御手段に送信されたことを契機に行われ、得られた「回転数情報」及び「燃料流量情報」の各状況は、図4のデータ確認欄103に表示される。
【0036】
<燃費情報作成工程>
次に、制御手段23は、B-2で得た「航行情報」と、B-3で得た「海象情報」と、C-2で得た「位置情報」とに基づいて図7に示す燃費情報を作成する(B-7)。この工程が燃費情報作成工程(S4)である。
燃費情報作成工程は、例えば、以下のようにして行われる。
まず、制御手段23は、B-2で得た「航程情報」に含まれる「出発予定地(港)」及び「到着予定地(港)」に関連する「港間距離データ」を記憶手段25から読み出す。
【0037】
次に、制御手段23は、B-2で得た「航程情報」に含まれる「出発予定地(港)」及び「到着予定地(港)」に関連する「海流データ」、「水面波データ」、及び「潮汐データ」を記憶手段25から読み出す。
次に、制御手段23は、B-2で得た「航程情報」に含まれる「海峡通過の有無」を参照し、「海峡通過有り」であれば、その海峡に関連する「海峡潮流データ」及び「海峡通過条件データ」を記憶手段25から読み出す。
【0038】
そして、制御手段23は、記憶手段25から読み出した「港間距離データ」と、「海流データ」、「水面波データ」、及び「潮汐データ」と、必要に応じて「海峡潮流データ」及び「海峡通過条件データ」と、B-2で得た「航程情報」に含まれる「出発予定時刻」から「到着予定時刻」までの時間とから当該船舶10に要求される船速を算出する。
その後、制御手段23は、この算出された船速と、記憶手段25に記憶された「主機関の回転数(馬力)と速力との変換テーブルデータ」、及び「排水量による速力の影響度テーブルデータ」とから「主機関の推奨回転数(以下、推奨回転数と呼ぶ。)」を算出する。
【0039】
なお、船舶10が航行中においては、記憶手段25に記憶された「港間距離データ」と、C-2で得た「位置情報」とに基づいて、到着予定地(港)までの残距離を算出する。その後、制御手段23は、この残距離と、現在時刻から到着予定時刻までの時間とから当該船舶10に要求される船速を算出する。そして、制御手段23は、この算出された船速と、記憶手段25に記憶された「主機関の回転数(馬力)と速力との変換テーブルデータ」、及び「排水量による速力の影響度テーブルデータ」とから「推奨回転数」を算出する。
【0040】
[燃費情報]
制御手段23によって作成される「燃費情報」は、少なくとも「推奨回転数」、及び「主機関の実回転数」を含む情報である。「燃費情報」は、この「推奨回転数」以外に、「実燃費」、「実船速」といった、船舶10のリアルタイムな情報も含まれる。ここで、「主機関の実回転数」は、上記A-1で制御手段23が取得する情報である。また、制御手段23によって作成される「燃費情報」には、前記「推奨回転数」によって船舶10を航行した場合の燃費情報として算出される「推奨燃費」も含まれる。この「推奨燃費」は、上記「推奨回転数」と「船舶情報」、「航程情報」及び「海象情報」とから導出される情報である。また、「実燃費」は、燃料流量計12から送信される「燃料流量情報」から導出される情報である。また、「実船速」は、「航程情報」及び「位置情報」によって導出される情報である。
【0041】
<燃費情報表示工程>
次に、制御手段23は、作業者が入力手段22を用いて図4の「燃費表示開始/終了」ボタン104を選択したことを契機に、燃費情報作成工程で作成された燃費情報を表示手段24に対して送信し(B-8)、当該燃費情報を表示手段24に表示要求する。燃費情報を制御手段23から受信した表示手段24は、その燃費情報のうち、図8に示すように、少なくとも「推奨回転数」と「主機関の実回転数(「主機関回転数」と表示)」とをトレンドグラフの態様で対比して船舶10の操縦者に対して表示する(B-9)。なお、図8は、出航前の状態の船舶に関する画面であるので、「推奨回転数」及び「主機関の実回転数」はまだ表示されていない。この工程が燃費情報表示工程(S5)である。このように、少なくとも「推奨回転数」と「主機関の実回転数」とが、航行中の船舶の操縦者にリアルタイムに視認されることによって、適正燃費を達成し、操縦者の操縦上の負担を大幅に軽減することができる船舶運航支援装置を提供することができる。
【0042】
そして、当該船舶10が到着予定港に到着した際、作業者が入力手段22を用いて図4の「到着港に到着」ボタン105を選択したことを契機に、実行された航行(図4の航海名102bの航行)における燃費情報に対応する実情報(航行距離、航行時間、実回転数の履歴、実燃費など)が確定する。
ここで、燃費情報表示工程(S5)においては、表示手段24が、制御手段23から受信した燃費情報のうち、「推奨回転数」及び「主機関の実回転数」に加えて、図9に示すように、「推奨燃費」及び「実燃費」をトレンドグラフの態様で対比して船舶10の操縦者に対して表示してもよい。この「推奨燃費」が当該船舶10の航行計画の目標としていた「適正燃費」以下であれば、燃費の低減化の目的も達成したことになる。なお、図9に示す「推奨燃費」及び「実燃費」は、説明の便宜上、引き出し線を用いて特定しているが、実際には、色違いで表示されることが好ましい。
【0043】
<判別工程>
その後、制御手段23は、判別工程(S6)を実行する。
判別工程(S6)は、船舶10の状態が燃費表示の終了条件を満たすか否かを制御手段23が判別する工程である。終了条件としては、C-2で送信された位置情報が、直前にB-7(S4)で作成された燃費情報における「到着予定地(港)」に一致する場合や、入力手段22に「終了情報」が入力されたことを契機に入力手段22から終了情報が送信される場合(B-10)などが挙げられる。「終了情報の送信」の例としては、作業者による燃費表示を中断する指示ボタンの押下を入力手段22が検知する動作等が挙げられる。
【0044】
この工程において、終了条件が満たされた場合(B-11−Yes)、本実施形態における船舶燃料表示方法は終了する。一方、この工程において、終了条件が満たされなかった場合(B-11−No)、制御手段23は、再び位置情報認識手段30に対して位置特定信号を発信し(B-4)、B-11にて終了条件が満たされる(B-11−Yes)まで位置情報取得工程(S3)、燃費情報作成工程(S4)、燃費情報表示工程(S5)、及び判別工程(S6)を繰り返す。すなわち、判別工程(S6)において終了条件を満たさない間は、燃費情報作成工程(S4)によって船舶10自身の現在位置を再度把握し、この現在位置に基づいて燃費情報表示工程(S5)及び判別工程(S6)が実行される。
【0045】
以上説明したように、本実施形態の船舶運航支援装置によれば、燃費情報として、操縦者に推奨回転数を表示するので、操縦者は、その推奨回転数を維持することに努めればよく、燃費向上を達成し、操縦上の負担を大幅に軽減することができる。
以上、本発明の実施の形態について説明してきたが、本発明はこれに限定されずに、種々の変更、改良を行うことができる。例えば、前記航行情報及び前記燃費情報を含む運航データを記憶媒体に保存し、当該記憶媒体に保存された運航データを陸上の端末で読み出して、船舶運航支援装置を搭載した当該船舶の省エネ運航評価を行うことも可能である。
【符号の説明】
【0046】
10 船舶
20 船舶運航支援装置
30 位置情報認識手段
【特許請求の範囲】
【請求項1】
入力手段と、記憶手段を備えた制御手段と、表示手段とを有し、
位置情報認識手段に通信可能に接続され、
前記制御手段は、前記入力手段によって入力される船舶の航行情報と、前記記憶手段に予め記憶された海象情報のうち、前記航行情報に関連する海象情報と、前記位置情報認識手段によって取得される航行中の前記船舶の位置情報とから、前記航行情報に基づく前記船舶の航行中の少なくとも主機関の推奨回転数情報を有する燃費情報を作成すると共に、該制御手段に通信可能に接続された前記船舶の主機関の回転計から航行中の前記船舶の主機関の実回転数情報を取得する手段であり、
前記表示手段は、前記船舶に設置され、前記推奨回転数情報と、前記実回転数情報とを操縦者に認識可能に表示する手段であることを特徴とする船舶運航支援装置。
【請求項2】
前記制御手段は、所定時間毎に前記位置情報認識手段から取得した前記位置情報に基づいて前記燃費情報を再作成することを特徴とする請求項1に記載の船舶運航支援装置。
【請求項3】
前記制御手段が、該制御手段に通信可能に接続された前記船舶の燃料流量計から取得した航行中の前記船舶の燃料流量情報に基づいて作成した前記燃費情報を前記表示手段が操縦者に認識可能に表示することを特徴とする請求項1又は2に記載の船舶運航支援装置。
【請求項1】
入力手段と、記憶手段を備えた制御手段と、表示手段とを有し、
位置情報認識手段に通信可能に接続され、
前記制御手段は、前記入力手段によって入力される船舶の航行情報と、前記記憶手段に予め記憶された海象情報のうち、前記航行情報に関連する海象情報と、前記位置情報認識手段によって取得される航行中の前記船舶の位置情報とから、前記航行情報に基づく前記船舶の航行中の少なくとも主機関の推奨回転数情報を有する燃費情報を作成すると共に、該制御手段に通信可能に接続された前記船舶の主機関の回転計から航行中の前記船舶の主機関の実回転数情報を取得する手段であり、
前記表示手段は、前記船舶に設置され、前記推奨回転数情報と、前記実回転数情報とを操縦者に認識可能に表示する手段であることを特徴とする船舶運航支援装置。
【請求項2】
前記制御手段は、所定時間毎に前記位置情報認識手段から取得した前記位置情報に基づいて前記燃費情報を再作成することを特徴とする請求項1に記載の船舶運航支援装置。
【請求項3】
前記制御手段が、該制御手段に通信可能に接続された前記船舶の燃料流量計から取得した航行中の前記船舶の燃料流量情報に基づいて作成した前記燃費情報を前記表示手段が操縦者に認識可能に表示することを特徴とする請求項1又は2に記載の船舶運航支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−14252(P2013−14252A)
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願番号】特願2011−149189(P2011−149189)
【出願日】平成23年7月5日(2011.7.5)
【出願人】(593005644)JFE物流株式会社 (11)
【Fターム(参考)】
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願日】平成23年7月5日(2011.7.5)
【出願人】(593005644)JFE物流株式会社 (11)
【Fターム(参考)】
[ Back to top ]