
船首方位補正装置、船首方位補正プログラム、及び船首方位補正方法
【課題】船首方位センサの出力方位を自動かつ高精度に補正する船首方位補正装置を提供する。
【解決手段】船首方位補正装置は、出力方位取得部と、対地針路取得部と、補正部と、を備える。前記出力方位取得部は、船首方位センサが出力する方位である出力方位を取得する。前記対地針路取得部は、GNSSセンサの検出結果に基づいて得られる対地針路を取得する。前記補正部は、前記出力方位と前記対地針路との差に基づいて、当該差を小さくするように前記出力方位を補正する。
【解決手段】船首方位補正装置は、出力方位取得部と、対地針路取得部と、補正部と、を備える。前記出力方位取得部は、船首方位センサが出力する方位である出力方位を取得する。前記対地針路取得部は、GNSSセンサの検出結果に基づいて得られる対地針路を取得する。前記補正部は、前記出力方位と前記対地針路との差に基づいて、当該差を小さくするように前記出力方位を補正する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、主要には、船首方位センサが出力する出力方位を船首方位に一致させるように補正を行う船首方位補正装置に関する。
【背景技術】
【0002】
従来から、特許文献1に示すように、方位センサを備え、当該方位センサが出力する出力方位を利用して船首方位を取得する構成が知られている。この種の構成では、方位センサを船舶に設置する際の誤差(取付誤差)があると、正しい船首方位を取得することができない。
【0003】
この方位センサの取付誤差を補正する方法として、例えば、以下の方法が知られている。即ち、初めに、例えば海図等に基づいて自船から見た方位が分かる目標物を探し出す。次に、海図等から得られる目標物の方位と、方位センサから得られる目標物の方位と、を比較する。次に、この比較結果に基づいて方位センサの取付誤差を求め、この取付誤差を無くすように、方位センサの出力方位をソフトウェア的に補正する。以上により、出力方位を船首方位と一致(又は略一致)させることができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−274866号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上記の方法は、複数の工程が必要であるため、手間が掛かってしまう。また、ユーザが手作業で誤差を補正するため、ミスが発生したり、補正の精度が低くなったりして出力方位を船首方位に精度良く近づけられない場合も考えられる。
【0006】
本発明は以上の事情に鑑みてされたものであり、その目的は、船首方位センサの出力方位を自動かつ高精度に補正する船首方位補正装置を提供することにある。
【課題を解決するための手段及び効果】
【0007】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
【0008】
本発明の第1の観点によれば、以下の構成の船首方位補正装置が提供される。即ち、この船首方位補正装置は、出力方位取得部と、対地針路取得部と、補正部と、を備える。前記出力方位取得部は、船首方位センサが出力する方位である出力方位を取得する。前記対地針路取得部は、GNSSセンサの検出結果に基づいて得られる対地針路を取得する。前記補正部は、前記出力方位と前記対地針路との差に基づいて、当該差を小さくするように前記出力方位を補正する。
【0009】
これにより、GNSSセンサによって得られた対地針路との比較に基づいて出力方位が補正されるため、精度の高い出力方位(船首方位と一致又は略一致する出力方位)を他の舶用機器に提供することができる。また、ユーザによる出力方位の補正作業の手間を省くことができる。
【0010】
前記の船首方位補正装置においては、前記補正部は、前記対地針路が安定していると判定したときに、前記出力方位の補正を行うことが好ましい。
【0011】
これにより、対地針路が安定しているとき(即ち、対地針路と出力方位との差を正確に検出できるとき)に補正部による補正が行われるため、出力方位の精度を高くすることができる。
【0012】
前記の船首方位補正装置においては、前記補正部は、前記出力方位が安定していると判定したときに、前記出力方位の補正を行うことが好ましい。
【0013】
これにより、出力方位が安定しているとき(即ち、対地針路と出力方位との差を正確に検出できるとき)に補正部による補正が行われるため、出力方位の精度を高くすることができる。
【0014】
前記の船首方位補正装置においては、前記補正部は、船速が所定の速度よりも速いときに、前記出力方位の補正を行うことが好ましい。
【0015】
これにより、船速が速いとき(即ち、風や潮流等の影響が相対的に小さくなるとき)に補正部による補正が行われるため、出力方位の精度を高くすることができる。
【0016】
前記の船首方位補正装置においては、前記補正部は、補正を行うか否かを決定するための閾値よりも前記出力方位と前記対地針路との差が大きいときに、前記出力方位の補正を行うことが好ましい。
【0017】
これにより、較正が必要な誤差が生じているときにのみ補正が行われるため、出力方位が頻繁に補正されることを防止できる。従って、例えば、船首方位が表示される場合に、当該船首方位が細かく揺動すること等を防止できる。
【0018】
前記の船首方位補正装置においては、前記補正部は、潮流の強さ及び自船に対する潮流の向きに基づいて、前記出力方位の補正を行うか否かを決定することが好ましい。
【0019】
これにより、船舶が潮流に流されて船首方位と対地針路との差が大きいときに出力方位が補正されることを回避できる。従って、適切なタイミング(出力方位に誤差が生じにくいタイミング)で出力方位の補正を行うことができる。
【0020】
前記の船首方位補正装置においては、前記補正部は、風の強さ及び自船に対する風の向きに基づいて、前記出力方位の補正を行うか否かを決定することが好ましい。
【0021】
これにより、船舶が風に流されて船首方位と対地針路との差が大きいときに出力方位が補正されることを回避できる。従って、適切なタイミング(出力方位に誤差が生じにくいタイミング)で出力方位の補正を行うことができる。
【0022】
前記の船首方位補正装置においては、通知を行うか否かを決定するための閾値よりも前記出力方位と前記対地針路との差が大きいときに、通知を行うことが好ましい。
【0023】
これにより、船首方位センサの取付向きが大幅にズレていたり、船首方位センサが方位を適切に検出できなくなったりした可能性があることをユーザに知らせることができる。
【0024】
前記の船首方位補正装置においては、前記対地針路と比較して前記出力方位が不安定であると判定したときに通知を行うことが好ましい。
【0025】
これにより、船首方位センサの取付けが緩んでいる可能性があること等をユーザに知らせることができる。
【0026】
本発明の第2の観点によれば、以下の構成の船首方位補正プログラムが提供される。即ち、この船首方位補正プログラムは、コンピュータに、出力方位取得手順と、対地針路取得手順と、補正手順と、を実行させる。前記出力方位取得手順では、船首方位センサが出力する方位である出力方位を取得する。前記対地針路取得手順では、GNSSセンサの検出結果に基づいて得られる対地針路を取得する。前記補正手順では、前記出力方位と前記対地針路との差に基づいて、当該差を小さくするように前記出力方位を補正する。
【0027】
これにより、GNSSセンサによって得られた対地針路との比較に基づいて出力方位が補正されるため、精度の高い出力方位(船首方位とのズレがゼロ又は微小である出力方位)を他の舶用機器に提供することができる。また、ユーザによる出力方位の補正作業の手間を省くことができる。
【0028】
本発明の第3の観点によれば、以下の船首方位補正方法が提供される。即ち、この船首方位補正方法は、出力方位取得工程と、対地針路取得工程と、補正工程と、を含む。前記出力方位取得工程では、船首方位センサが出力する方位である出力方位を取得する。前記対地針路取得工程では、GNSSセンサの検出結果に基づいて得られる対地針路を取得する。前記補正工程では、前記出力方位と前記対地針路との差に基づいて、当該差を小さくするように前記出力方位を補正する。
【0029】
これにより、GNSSセンサによって得られた対地針路との比較に基づいて出力方位が補正されるため、精度の高い出力方位(船首方位とのズレがゼロ又は微小である出力方位)を他の舶用機器に提供することができる。また、ユーザによる出力方位の補正作業の手間を省くことができる。
【図面の簡単な説明】
【0030】
【図1】舶用機器ネットワークシステムの全体的な構成を示すブロック図。
【図2】表示装置の正面図。
【図3】船首方位センサの出力方位を補正するための構成を示すブロック図。
【図4】補正量の算出方法について説明する図。
【図5】船首方位センサの出力方位を補正するための処理の流れを示すフローチャート。
【図6】対地針路が不安定な場合、及び、風や潮等の影響を大きく受けた場合の様子を示す図。
【図7】船首方位センサの出力方位を補正するための他の構成を示すブロック図。
【発明を実施するための形態】
【0031】
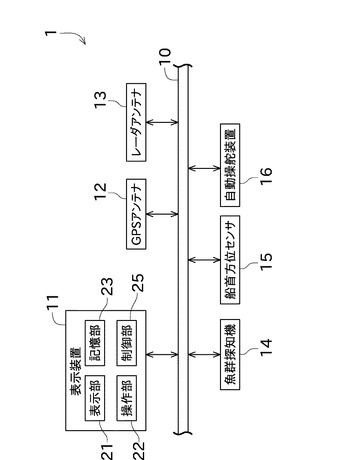
次に、図面を参照して本発明の実施の形態を説明する。図1は、舶用機器ネットワークシステム1の全体的な構成を示すブロック図である。図2は、表示装置11の正面図である。
【0032】
本実施形態の舶用機器ネットワークシステム1は、舶用ネットワーク10に接続された複数の舶用機器等から構成される。舶用機器同士は、検出した情報等を、舶用ネットワーク10を介してやり取りすることができる。舶用ネットワーク10の規格としては、例えばLAN(Local Area Network)やCAN(Controller Area Network)を採用することができる。
【0033】
図1に示すように、本実施形態の舶用機器ネットワークシステム1は、表示装置11と、GPSアンテナ(GNSSセンサ)12と、レーダアンテナ13と、魚群探知機(音響センサ)14と、船首方位センサ15と、自動操舵装置16と、を備えている。
【0034】
表示装置11は、他の舶用機器(センサ)が検出した情報に基づいて映像(センサ映像)を作成して表示するとともに、ユーザの操作に応じた処理を行う構成である。具体的には、表示装置11は、表示部21と、操作部22と、記憶部23と、制御部25と、を備えている。なお、本実施形態の表示装置11は、当該表示装置11自身が操作部を備える構成であるが、マウスやキーボード等の操作部を外付けできる構成であっても良いし、ユーザのタッチ操作を検出できる構成であっても良い。
【0035】
表示部21は、液晶ディスプレイ等で構成されており、前述のように、センサ映像や、各種設定画面等を表示画面に表示することができる。
【0036】
操作部22は、例えば、時計回り又は反時計回りに回転させる操作が可能な回転キー、メニュー画面を呼び出すためのメニューキー、及びカーソルキー等で構成されている。
【0037】
記憶部23は、制御部25が実行するプログラムの内容、海図情報、及びユーザに設定された航海ルート等を記憶している。
【0038】
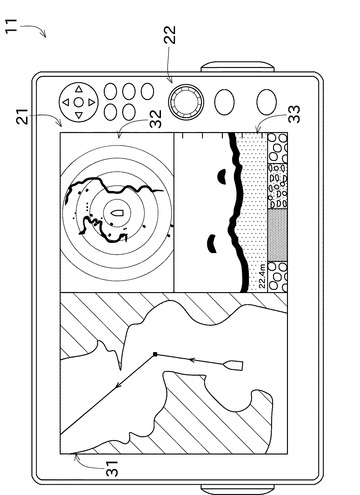
制御部25は、記憶部23の記憶内容及び他の舶用機器から受信した情報に基づいて前記センサ映像(レーダ映像や自船周囲の海図等)を作成し、表示部21に表示する。制御部25は、複数の舶用機器から情報を受信しており、複数のセンサ映像を作成する。制御部25は、この複数のセンサ映像のうち1つのみを表示画面に表示するモード(全画面モード)と、表示画面を分割して複数のセンサ映像を表示するモード(分割画面モード、図2を参照)と、を切替可能である。
【0039】
GPSアンテナ12は、GPS衛星(GNSS衛星)からの測位信号を受信して、舶用ネットワーク10を介して、表示装置11等へ出力している。表示装置11の制御部25は、この測位信号に基づいて自船の位置(詳細には、GPSアンテナの位置、地球基準の絶対位置)を求めている。なお、測位信号から位置を求める演算をGPSアンテナ12側で行い、自船の位置を表示装置11へ出力する構成であっても良い。
【0040】
表示装置11は、求めた自船の位置と、記憶部23に記憶された海図情報と、に基づいて、航法装置としての機能を発揮することができる。具体的には、制御部25は、取得した自船の位置と、記憶部23に記憶した海図情報と、に基づいて、海図上に自船の位置を重畳して表示部21に表示することができる。また、制御部25は、時刻に応じて変化する自船の位置を利用して、対地船速を求めたり、自船の航跡を求めたりして表示部21に表示することができる。
【0041】
レーダアンテナ13は、マイクロ波の送信を行うとともに、物標からの反射波を受信する。この反射波は、適宜の信号処理が行われた後に、表示装置11へ出力される。表示装置11は、この反射波に基づいてレーダ映像を作成する。具体的には、表示装置11の制御部25は、マイクロ波を送信してから反射波を受信するまでの時間から、物標の距離を求める。また、制御部25は、マイクロ波を送信した方向に基づいて、物標が存在する方向を求める。制御部25は、このようにしてレーダ映像を作成して、表示部21に表示する(図2に示す第2センサ映像32を参照)。
【0042】
魚群探知機14は、振動子と、分析部と、から構成される。振動子は、船底等に設置され、海中の真下方向に向けて超音波を発射するとともに、海底又は魚群からの反射波を受信する。分析部は、反射波に基づいて、魚探データ(魚群探知機によって取得されるデータ、魚群や海底のデータ)を作成する。また、本実施形態の魚群探知機14は、取得した魚探データに基づいて、海底の状態(底質)を判定する機能を有している。具体的には、分析部は、受信した反射波を分析することで、海底が岩、礫(石)、砂、及び泥の何れの可能性が高いかを判定することができる。この魚探データ及び判別した底質は、表示装置11へ出力される。そして、表示装置11の制御部25は、受信したデータに基づいて第3センサ映像33を作成し(図2を参照)、表示部21に表示する。第3センサ映像33は、縦軸が魚探データを示し、横軸が魚探データを取得した時間(画面の左端に行くほど古くなる)を示している。
【0043】
船首方位センサ15は、自船の船首方向(船首が向いている方向)を、地球基準の絶対的な方位で検出するように構成されている。一般的に船舶は、船首方向へ向かって前進する。従って、船首方位センサ15は、船体の前進方向の方位を検出していると言うこともできる。船首方位センサ15は、例えば磁気方位センサや、GPSコンパス等を利用することができる。
【0044】
自動操舵装置16は、設定された航海ルートに沿って自船が移動するように舵の操作を自動的に行う装置である。具体的には、自動操舵装置16は、船首方位センサ15から取得した船首方位と、表示装置11から取得した航海ルートと、に基づいて、自船の船首をどれだけ変化させれば良いかを求める。そして、自動操舵装置16は、求めた値に応じて舵角を変化させることにより、自船の針路を航海ルートに一致させる。
【0045】
本実施形態の舶用機器ネットワークシステム1は、以上のように構成される。なお、舶用機器ネットワークシステム1を構成する舶用機器は任意であり、上記で説明した以外の舶用機器が接続される構成であっても良いし、同種の舶用機器が複数接続される構成であっても良い。また、舶用機器が取得したデータの処理は、当該舶用機器で行う構成であっても良いし、表示装置11の制御部25で行う構成であっても良い。
【0046】
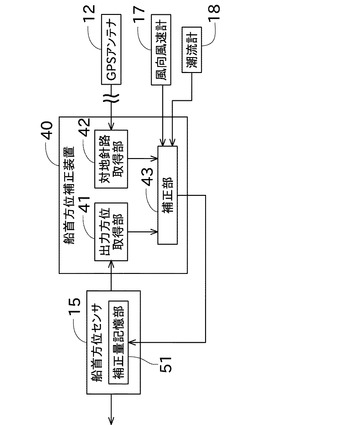
次に、上記で説明した船首方位センサ15について、特に船首方位センサ15の取付向きによって生じる出力方位の誤差を補正する方法について詳細に説明する。初めに、図3及び図4を参照して、船首方位センサ15の出力方位を補正するための構成について説明する。図3は、船首方位センサ15の出力方位を補正するための構成を示すブロック図である。図4は、補正量の算出方法について説明する図である。
【0047】
図3には、上記で説明したGPSアンテナ12及び船首方位センサ15に加え、船首方位センサ15の取付誤差を補正する船首方位補正装置40が示されている。なお、船首方位補正装置40は、図3のように独立した装置であっても良いし、他の舶用機器(例えば表示装置11)の内部に組み込まれていても良い。また、独立した装置である場合、船首方位センサ15に直接接続されていても良いし、舶用ネットワーク10を介して接続されていても良い。
【0048】
船首方位センサ15は、方位を検出する構成以外の構成として、補正量記憶部51を備える。補正量記憶部51には所定の補正量が記憶されており、船首方位センサ15が検出した方位に補正量を加えた値が出力方位となる。
【0049】
この出力方位は、表示装置11等へ出力されており、第1センサ映像31や第2センサ映像32上に船首方位を表示するためや、船首方位の向きがセンサ映像の上方となるように画像を回転させるため等に用いられる。また、この出力方位は、船首方位補正装置40にも出力される。
【0050】
船首方位補正装置40は、図3に示すように、出力方位取得部41と、対地針路取得部42と、補正部43と、を備える。
【0051】
出力方位取得部41は、船首方位センサ15の出力する出力方位を取得して、補正部43へ出力する。
【0052】
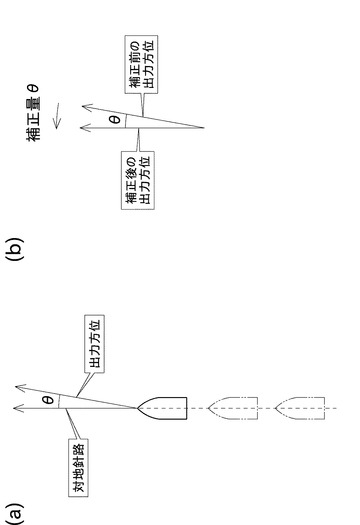
対地針路取得部42は、GPSアンテナ12の検出結果に基づいて得られる対地針路を取得する。対地針路とは、GPSアンテナ12に基づいて、過去の自船の絶対位置と現在の自船の絶対位置とに基づいて得られる現在の自船の向きである。例えば、図4(a)に示すように自船が一方向に航行している場合は、当該方向が対地針路となる。対地針路は、GPSアンテナ12が取得する測位信号に基づいて得られるので、船首方位センサ15の出力方位と独立した値である。なお、前述のように、船の進行方向と船首方位とは通常は一致するので、対地針路と船首方位についても通常は一致する。
【0053】
補正部43は、上記のように対地針路と船首方位とが通常は一致することを利用して、出力方位をソフトウェア的に補正する構成である。つまり、例えば船首方位センサ15に取付誤差がある場合、この取付誤差は出力方位と船首方位との差として現れる。しかし、対地針路と一致するように出力方位を補正することで、出力方位を船首方位に一致させることができる。補正部43は、前記補正量記憶部51が記憶する補正量を変化させることで出力方位を調整する。補正部43は、例えば図4(a)に示すように、対地針路と出力方位との差がθであった場合、この差を小さくする方向(図4(b)に示すように反時計回り)の補正量としてθを設定する。このように、取付誤差に起因する方位の差θを相殺してゼロにするように補正量を設定することで、補正後の出力方位を船首方位と一致させることができる。
【0054】
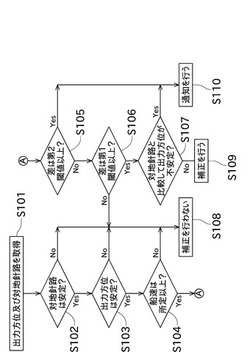
次に、上記で説明した船首方位補正装置40が船首方位センサ15の出力方位を補正する処理について、図5及び図6を参照して説明する。図5は、船首方位補正装置40が船首方位センサ15の出力方位を補正するときの流れを示すフローチャートである。図6は、出力方位の補正を行わないときの自船の状態を示す図である。
【0055】
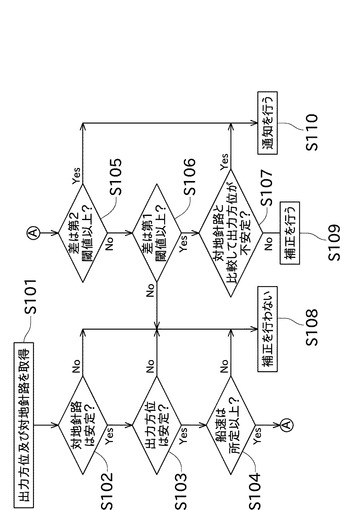
上記で説明したように、通常は、対地針路と船首方位とは一致する。しかし、対地針路は過去の位置情報も参考にして求められるため、例えば船舶が蛇行している場合や旋回している場合等、対地針路と船首方位とが一致しないことがある。そのため、本実施形態の船首方位補正装置40は、対地針路と船首方位とが一致する蓋然性が高いときにのみ出力方位の補正を行う。図5に示すフローチャートでは、主として対地針路と船首方位とが一致するか否かの判定が行われる。
【0056】
船首方位補正装置40は、出力方位及び対地針路を出力方位取得部41及び対地針路取得部42により取得した後に(S101)、対地針路が安定しているか否かを判定する(S102)。この判定は、例えば所定時間における対地針路の変化量が所定以内(例えば3°以内)であるか否かに基づいて行われる。つまり、旋回している場合(図6(a)を参照)や蛇行している場合は、対地針路が不安定と判定される。対地針路が不安定と判定される場合、対地針路と船首方位とが一致しない可能性があると考えられるので、船首方位補正装置40は出力方位の補正を行わない(S108)。
【0057】
一方、対地針路が安定していると判定した場合、船首方位補正装置40は、出力方位が安定しているか否かを判定する(S103)。この判定もS102と同様に、例えば所定時間における対地針路の変化量が所定以内(例えば3°以内)か否かに基づいて行われる。出力方位が不安定と判定される場合、補正する対象の値が明確に定まらないと考えられるので、船首方位補正装置40は出力方位の補正を行わない(S108)。
【0058】
一方、出力方位が安定していると判定した場合、船首方位補正装置40は、船速(対地船速又は対水船速)が所定以上であるか否かを判定する(S104)。図6に示すように、船舶は、例えば風や波等の影響によって船首方位以外の向きにも進む。船速が遅い場合は、船首方位の方向にあまり進まないので、風や波等の影響が相対的に大きくなる。従って、船首方位補正装置40は、船速が所定以上でない場合は、出力方位の補正を行わない(S108)。
【0059】
一方、船速が所定以上であると判定した場合、船首方位補正装置40は、出力方位と対地針路の差が第2閾値以上か否かを判定する(S105)。なお、この第2閾値は、後述の第1閾値よりも大きいものとする。出力方位及び対地針路は、通常は同程度の値を示すので、この差が大きい場合、例えば船首方位センサ15の取付向きが大幅にズレていたり、船首方位センサが方位を適切に検出できなくなったりした可能性がある。そのため、船首方位補正装置40は、出力方位と対地針路の差が第2閾値以上である場合、音や光等によって、その旨をユーザに通知する(S110)。
【0060】
一方、船首方位補正装置40は、出力方位と対地針路の差が第2閾値より小さい場合、当該差が第1閾値以上かそうでないかを判定する(S106)。この第1閾値は、補正の要否を判断するための閾値であるので、第1閾値としては第2閾値よりも相当に小さい値が設定される。そして、船首方位補正装置40は、出力方位と対地針路の差が第1閾値より小さい場合、補正の必要がない程度の誤差であるので、補正を行わない(S108)。
【0061】
一方、船首方位補正装置40は、出力方位と対地針路の差が第1閾値以上である場合、対地針路と比較して出力方位が不安定か否かを判定する(S107)。この判定は、S102及びS103の判定で用いた変化量に基づいて行われる。また、対地針路と出力方位とは通常同じ挙動を示すので、対地針路だけが安定で出力方位が不安定である場合、例えば船首方位センサ15の固定が緩み、ガタつき等が発生している可能性がある。そのため、船首方位補正装置40は、対地針路と比較して出力方位が不安定と判定した場合、音や光等によって、その旨をユーザに通知する(S110)。一方、船首方位補正装置40は、対地針路と比較して出力方位が不安定でないと判定した場合、上述のように、出力方位と対地針路との差をなくすように補正量を設定して、出力方位を補正する(S109)。
【0062】
以上のように、判定を行うことにより、出力方位を自動的かつ精度良く補正することができる。また、出力方位を補正するか否かについての判定は、上記に限られず適宜の方法を用いることができる。例えば、図7に示すように、風の向き及び強さを検出する風向風速計17と、潮流(海流も含む)の向き及び強さを検出する潮流計18と、を備え、これらが検出した結果に基づいて判定を行っても良い。
【0063】
例えば、風又は潮の向きが船首方位と垂直である場合(図6(b)に示す場合)、船舶は、船首方位と異なる方向へ移動し易くなる。一方、風又は潮の向きが船首方位と平行である場合、船舶は、船首方位と異なる方向へ移動しにくくなる。また、風や潮の強さが大きい場合も、船首方位と異なる方向へ移動し易くなる。以上の点を考慮して条件を設定して、当該条件を満たした場合にのみ出力方位の補正を行う構成とすることができる。
【0064】
以上に説明したように、船首方位補正装置40は、出力方位取得部41と、対地針路取得部42と、補正部43と、を備える。出力方位取得部41は、船首方位センサ15が出力する方位である出力方位を取得する。対地針路取得部42は、GPSアンテナ12の検出結果に基づいて得られる対地針路を取得する。補正部43は、出力方位と対地針路との差に基づいて、当該差を小さくするように出力方位を補正する。
【0065】
これにより、GPSアンテナ12によって得られた対地針路との比較に基づいて出力方位が補正されるため、精度の高い出力方位(船首方位とのズレがゼロ又は微小である出力方位)を他の舶用機器(表示装置11等)に提供することができる。また、ユーザによる出力方位の補正作業の手間を省くことができる。
【0066】
以上に本発明の好適な実施の形態を説明したが、上記の構成は例えば以下のように変更することができる。
【0067】
上記実施形態では、GNSSの一例としてGPSを用いた実施例を説明したが、他のGNSSを用いる構成であっても良いことは勿論である。
【0068】
対地針路及び出力方位が安定しているか否かを判定する方法は、上記で示した例に限られない。また、第1閾値及び第2閾値として設定する値や、船速を判定する場合の基準となる速度についても、任意に設定することができる。
【符号の説明】
【0069】
1 舶用機器ネットワークシステム
10 舶用ネットワーク
11 表示装置
12 GPSアンテナ(GNSSセンサ)
13 レーダアンテナ
14 魚群探知機
15 船首方位センサ
16 自動操舵装置
17 風向風速計
18 潮流計
40 船首方位補正装置
41 出力方位取得部
42 対地針路取得部
43 補正部
51 補正量記憶部
【技術分野】
【0001】
本発明は、主要には、船首方位センサが出力する出力方位を船首方位に一致させるように補正を行う船首方位補正装置に関する。
【背景技術】
【0002】
従来から、特許文献1に示すように、方位センサを備え、当該方位センサが出力する出力方位を利用して船首方位を取得する構成が知られている。この種の構成では、方位センサを船舶に設置する際の誤差(取付誤差)があると、正しい船首方位を取得することができない。
【0003】
この方位センサの取付誤差を補正する方法として、例えば、以下の方法が知られている。即ち、初めに、例えば海図等に基づいて自船から見た方位が分かる目標物を探し出す。次に、海図等から得られる目標物の方位と、方位センサから得られる目標物の方位と、を比較する。次に、この比較結果に基づいて方位センサの取付誤差を求め、この取付誤差を無くすように、方位センサの出力方位をソフトウェア的に補正する。以上により、出力方位を船首方位と一致(又は略一致)させることができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−274866号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上記の方法は、複数の工程が必要であるため、手間が掛かってしまう。また、ユーザが手作業で誤差を補正するため、ミスが発生したり、補正の精度が低くなったりして出力方位を船首方位に精度良く近づけられない場合も考えられる。
【0006】
本発明は以上の事情に鑑みてされたものであり、その目的は、船首方位センサの出力方位を自動かつ高精度に補正する船首方位補正装置を提供することにある。
【課題を解決するための手段及び効果】
【0007】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
【0008】
本発明の第1の観点によれば、以下の構成の船首方位補正装置が提供される。即ち、この船首方位補正装置は、出力方位取得部と、対地針路取得部と、補正部と、を備える。前記出力方位取得部は、船首方位センサが出力する方位である出力方位を取得する。前記対地針路取得部は、GNSSセンサの検出結果に基づいて得られる対地針路を取得する。前記補正部は、前記出力方位と前記対地針路との差に基づいて、当該差を小さくするように前記出力方位を補正する。
【0009】
これにより、GNSSセンサによって得られた対地針路との比較に基づいて出力方位が補正されるため、精度の高い出力方位(船首方位と一致又は略一致する出力方位)を他の舶用機器に提供することができる。また、ユーザによる出力方位の補正作業の手間を省くことができる。
【0010】
前記の船首方位補正装置においては、前記補正部は、前記対地針路が安定していると判定したときに、前記出力方位の補正を行うことが好ましい。
【0011】
これにより、対地針路が安定しているとき(即ち、対地針路と出力方位との差を正確に検出できるとき)に補正部による補正が行われるため、出力方位の精度を高くすることができる。
【0012】
前記の船首方位補正装置においては、前記補正部は、前記出力方位が安定していると判定したときに、前記出力方位の補正を行うことが好ましい。
【0013】
これにより、出力方位が安定しているとき(即ち、対地針路と出力方位との差を正確に検出できるとき)に補正部による補正が行われるため、出力方位の精度を高くすることができる。
【0014】
前記の船首方位補正装置においては、前記補正部は、船速が所定の速度よりも速いときに、前記出力方位の補正を行うことが好ましい。
【0015】
これにより、船速が速いとき(即ち、風や潮流等の影響が相対的に小さくなるとき)に補正部による補正が行われるため、出力方位の精度を高くすることができる。
【0016】
前記の船首方位補正装置においては、前記補正部は、補正を行うか否かを決定するための閾値よりも前記出力方位と前記対地針路との差が大きいときに、前記出力方位の補正を行うことが好ましい。
【0017】
これにより、較正が必要な誤差が生じているときにのみ補正が行われるため、出力方位が頻繁に補正されることを防止できる。従って、例えば、船首方位が表示される場合に、当該船首方位が細かく揺動すること等を防止できる。
【0018】
前記の船首方位補正装置においては、前記補正部は、潮流の強さ及び自船に対する潮流の向きに基づいて、前記出力方位の補正を行うか否かを決定することが好ましい。
【0019】
これにより、船舶が潮流に流されて船首方位と対地針路との差が大きいときに出力方位が補正されることを回避できる。従って、適切なタイミング(出力方位に誤差が生じにくいタイミング)で出力方位の補正を行うことができる。
【0020】
前記の船首方位補正装置においては、前記補正部は、風の強さ及び自船に対する風の向きに基づいて、前記出力方位の補正を行うか否かを決定することが好ましい。
【0021】
これにより、船舶が風に流されて船首方位と対地針路との差が大きいときに出力方位が補正されることを回避できる。従って、適切なタイミング(出力方位に誤差が生じにくいタイミング)で出力方位の補正を行うことができる。
【0022】
前記の船首方位補正装置においては、通知を行うか否かを決定するための閾値よりも前記出力方位と前記対地針路との差が大きいときに、通知を行うことが好ましい。
【0023】
これにより、船首方位センサの取付向きが大幅にズレていたり、船首方位センサが方位を適切に検出できなくなったりした可能性があることをユーザに知らせることができる。
【0024】
前記の船首方位補正装置においては、前記対地針路と比較して前記出力方位が不安定であると判定したときに通知を行うことが好ましい。
【0025】
これにより、船首方位センサの取付けが緩んでいる可能性があること等をユーザに知らせることができる。
【0026】
本発明の第2の観点によれば、以下の構成の船首方位補正プログラムが提供される。即ち、この船首方位補正プログラムは、コンピュータに、出力方位取得手順と、対地針路取得手順と、補正手順と、を実行させる。前記出力方位取得手順では、船首方位センサが出力する方位である出力方位を取得する。前記対地針路取得手順では、GNSSセンサの検出結果に基づいて得られる対地針路を取得する。前記補正手順では、前記出力方位と前記対地針路との差に基づいて、当該差を小さくするように前記出力方位を補正する。
【0027】
これにより、GNSSセンサによって得られた対地針路との比較に基づいて出力方位が補正されるため、精度の高い出力方位(船首方位とのズレがゼロ又は微小である出力方位)を他の舶用機器に提供することができる。また、ユーザによる出力方位の補正作業の手間を省くことができる。
【0028】
本発明の第3の観点によれば、以下の船首方位補正方法が提供される。即ち、この船首方位補正方法は、出力方位取得工程と、対地針路取得工程と、補正工程と、を含む。前記出力方位取得工程では、船首方位センサが出力する方位である出力方位を取得する。前記対地針路取得工程では、GNSSセンサの検出結果に基づいて得られる対地針路を取得する。前記補正工程では、前記出力方位と前記対地針路との差に基づいて、当該差を小さくするように前記出力方位を補正する。
【0029】
これにより、GNSSセンサによって得られた対地針路との比較に基づいて出力方位が補正されるため、精度の高い出力方位(船首方位とのズレがゼロ又は微小である出力方位)を他の舶用機器に提供することができる。また、ユーザによる出力方位の補正作業の手間を省くことができる。
【図面の簡単な説明】
【0030】
【図1】舶用機器ネットワークシステムの全体的な構成を示すブロック図。
【図2】表示装置の正面図。
【図3】船首方位センサの出力方位を補正するための構成を示すブロック図。
【図4】補正量の算出方法について説明する図。
【図5】船首方位センサの出力方位を補正するための処理の流れを示すフローチャート。
【図6】対地針路が不安定な場合、及び、風や潮等の影響を大きく受けた場合の様子を示す図。
【図7】船首方位センサの出力方位を補正するための他の構成を示すブロック図。
【発明を実施するための形態】
【0031】
次に、図面を参照して本発明の実施の形態を説明する。図1は、舶用機器ネットワークシステム1の全体的な構成を示すブロック図である。図2は、表示装置11の正面図である。
【0032】
本実施形態の舶用機器ネットワークシステム1は、舶用ネットワーク10に接続された複数の舶用機器等から構成される。舶用機器同士は、検出した情報等を、舶用ネットワーク10を介してやり取りすることができる。舶用ネットワーク10の規格としては、例えばLAN(Local Area Network)やCAN(Controller Area Network)を採用することができる。
【0033】
図1に示すように、本実施形態の舶用機器ネットワークシステム1は、表示装置11と、GPSアンテナ(GNSSセンサ)12と、レーダアンテナ13と、魚群探知機(音響センサ)14と、船首方位センサ15と、自動操舵装置16と、を備えている。
【0034】
表示装置11は、他の舶用機器(センサ)が検出した情報に基づいて映像(センサ映像)を作成して表示するとともに、ユーザの操作に応じた処理を行う構成である。具体的には、表示装置11は、表示部21と、操作部22と、記憶部23と、制御部25と、を備えている。なお、本実施形態の表示装置11は、当該表示装置11自身が操作部を備える構成であるが、マウスやキーボード等の操作部を外付けできる構成であっても良いし、ユーザのタッチ操作を検出できる構成であっても良い。
【0035】
表示部21は、液晶ディスプレイ等で構成されており、前述のように、センサ映像や、各種設定画面等を表示画面に表示することができる。
【0036】
操作部22は、例えば、時計回り又は反時計回りに回転させる操作が可能な回転キー、メニュー画面を呼び出すためのメニューキー、及びカーソルキー等で構成されている。
【0037】
記憶部23は、制御部25が実行するプログラムの内容、海図情報、及びユーザに設定された航海ルート等を記憶している。
【0038】
制御部25は、記憶部23の記憶内容及び他の舶用機器から受信した情報に基づいて前記センサ映像(レーダ映像や自船周囲の海図等)を作成し、表示部21に表示する。制御部25は、複数の舶用機器から情報を受信しており、複数のセンサ映像を作成する。制御部25は、この複数のセンサ映像のうち1つのみを表示画面に表示するモード(全画面モード)と、表示画面を分割して複数のセンサ映像を表示するモード(分割画面モード、図2を参照)と、を切替可能である。
【0039】
GPSアンテナ12は、GPS衛星(GNSS衛星)からの測位信号を受信して、舶用ネットワーク10を介して、表示装置11等へ出力している。表示装置11の制御部25は、この測位信号に基づいて自船の位置(詳細には、GPSアンテナの位置、地球基準の絶対位置)を求めている。なお、測位信号から位置を求める演算をGPSアンテナ12側で行い、自船の位置を表示装置11へ出力する構成であっても良い。
【0040】
表示装置11は、求めた自船の位置と、記憶部23に記憶された海図情報と、に基づいて、航法装置としての機能を発揮することができる。具体的には、制御部25は、取得した自船の位置と、記憶部23に記憶した海図情報と、に基づいて、海図上に自船の位置を重畳して表示部21に表示することができる。また、制御部25は、時刻に応じて変化する自船の位置を利用して、対地船速を求めたり、自船の航跡を求めたりして表示部21に表示することができる。
【0041】
レーダアンテナ13は、マイクロ波の送信を行うとともに、物標からの反射波を受信する。この反射波は、適宜の信号処理が行われた後に、表示装置11へ出力される。表示装置11は、この反射波に基づいてレーダ映像を作成する。具体的には、表示装置11の制御部25は、マイクロ波を送信してから反射波を受信するまでの時間から、物標の距離を求める。また、制御部25は、マイクロ波を送信した方向に基づいて、物標が存在する方向を求める。制御部25は、このようにしてレーダ映像を作成して、表示部21に表示する(図2に示す第2センサ映像32を参照)。
【0042】
魚群探知機14は、振動子と、分析部と、から構成される。振動子は、船底等に設置され、海中の真下方向に向けて超音波を発射するとともに、海底又は魚群からの反射波を受信する。分析部は、反射波に基づいて、魚探データ(魚群探知機によって取得されるデータ、魚群や海底のデータ)を作成する。また、本実施形態の魚群探知機14は、取得した魚探データに基づいて、海底の状態(底質)を判定する機能を有している。具体的には、分析部は、受信した反射波を分析することで、海底が岩、礫(石)、砂、及び泥の何れの可能性が高いかを判定することができる。この魚探データ及び判別した底質は、表示装置11へ出力される。そして、表示装置11の制御部25は、受信したデータに基づいて第3センサ映像33を作成し(図2を参照)、表示部21に表示する。第3センサ映像33は、縦軸が魚探データを示し、横軸が魚探データを取得した時間(画面の左端に行くほど古くなる)を示している。
【0043】
船首方位センサ15は、自船の船首方向(船首が向いている方向)を、地球基準の絶対的な方位で検出するように構成されている。一般的に船舶は、船首方向へ向かって前進する。従って、船首方位センサ15は、船体の前進方向の方位を検出していると言うこともできる。船首方位センサ15は、例えば磁気方位センサや、GPSコンパス等を利用することができる。
【0044】
自動操舵装置16は、設定された航海ルートに沿って自船が移動するように舵の操作を自動的に行う装置である。具体的には、自動操舵装置16は、船首方位センサ15から取得した船首方位と、表示装置11から取得した航海ルートと、に基づいて、自船の船首をどれだけ変化させれば良いかを求める。そして、自動操舵装置16は、求めた値に応じて舵角を変化させることにより、自船の針路を航海ルートに一致させる。
【0045】
本実施形態の舶用機器ネットワークシステム1は、以上のように構成される。なお、舶用機器ネットワークシステム1を構成する舶用機器は任意であり、上記で説明した以外の舶用機器が接続される構成であっても良いし、同種の舶用機器が複数接続される構成であっても良い。また、舶用機器が取得したデータの処理は、当該舶用機器で行う構成であっても良いし、表示装置11の制御部25で行う構成であっても良い。
【0046】
次に、上記で説明した船首方位センサ15について、特に船首方位センサ15の取付向きによって生じる出力方位の誤差を補正する方法について詳細に説明する。初めに、図3及び図4を参照して、船首方位センサ15の出力方位を補正するための構成について説明する。図3は、船首方位センサ15の出力方位を補正するための構成を示すブロック図である。図4は、補正量の算出方法について説明する図である。
【0047】
図3には、上記で説明したGPSアンテナ12及び船首方位センサ15に加え、船首方位センサ15の取付誤差を補正する船首方位補正装置40が示されている。なお、船首方位補正装置40は、図3のように独立した装置であっても良いし、他の舶用機器(例えば表示装置11)の内部に組み込まれていても良い。また、独立した装置である場合、船首方位センサ15に直接接続されていても良いし、舶用ネットワーク10を介して接続されていても良い。
【0048】
船首方位センサ15は、方位を検出する構成以外の構成として、補正量記憶部51を備える。補正量記憶部51には所定の補正量が記憶されており、船首方位センサ15が検出した方位に補正量を加えた値が出力方位となる。
【0049】
この出力方位は、表示装置11等へ出力されており、第1センサ映像31や第2センサ映像32上に船首方位を表示するためや、船首方位の向きがセンサ映像の上方となるように画像を回転させるため等に用いられる。また、この出力方位は、船首方位補正装置40にも出力される。
【0050】
船首方位補正装置40は、図3に示すように、出力方位取得部41と、対地針路取得部42と、補正部43と、を備える。
【0051】
出力方位取得部41は、船首方位センサ15の出力する出力方位を取得して、補正部43へ出力する。
【0052】
対地針路取得部42は、GPSアンテナ12の検出結果に基づいて得られる対地針路を取得する。対地針路とは、GPSアンテナ12に基づいて、過去の自船の絶対位置と現在の自船の絶対位置とに基づいて得られる現在の自船の向きである。例えば、図4(a)に示すように自船が一方向に航行している場合は、当該方向が対地針路となる。対地針路は、GPSアンテナ12が取得する測位信号に基づいて得られるので、船首方位センサ15の出力方位と独立した値である。なお、前述のように、船の進行方向と船首方位とは通常は一致するので、対地針路と船首方位についても通常は一致する。
【0053】
補正部43は、上記のように対地針路と船首方位とが通常は一致することを利用して、出力方位をソフトウェア的に補正する構成である。つまり、例えば船首方位センサ15に取付誤差がある場合、この取付誤差は出力方位と船首方位との差として現れる。しかし、対地針路と一致するように出力方位を補正することで、出力方位を船首方位に一致させることができる。補正部43は、前記補正量記憶部51が記憶する補正量を変化させることで出力方位を調整する。補正部43は、例えば図4(a)に示すように、対地針路と出力方位との差がθであった場合、この差を小さくする方向(図4(b)に示すように反時計回り)の補正量としてθを設定する。このように、取付誤差に起因する方位の差θを相殺してゼロにするように補正量を設定することで、補正後の出力方位を船首方位と一致させることができる。
【0054】
次に、上記で説明した船首方位補正装置40が船首方位センサ15の出力方位を補正する処理について、図5及び図6を参照して説明する。図5は、船首方位補正装置40が船首方位センサ15の出力方位を補正するときの流れを示すフローチャートである。図6は、出力方位の補正を行わないときの自船の状態を示す図である。
【0055】
上記で説明したように、通常は、対地針路と船首方位とは一致する。しかし、対地針路は過去の位置情報も参考にして求められるため、例えば船舶が蛇行している場合や旋回している場合等、対地針路と船首方位とが一致しないことがある。そのため、本実施形態の船首方位補正装置40は、対地針路と船首方位とが一致する蓋然性が高いときにのみ出力方位の補正を行う。図5に示すフローチャートでは、主として対地針路と船首方位とが一致するか否かの判定が行われる。
【0056】
船首方位補正装置40は、出力方位及び対地針路を出力方位取得部41及び対地針路取得部42により取得した後に(S101)、対地針路が安定しているか否かを判定する(S102)。この判定は、例えば所定時間における対地針路の変化量が所定以内(例えば3°以内)であるか否かに基づいて行われる。つまり、旋回している場合(図6(a)を参照)や蛇行している場合は、対地針路が不安定と判定される。対地針路が不安定と判定される場合、対地針路と船首方位とが一致しない可能性があると考えられるので、船首方位補正装置40は出力方位の補正を行わない(S108)。
【0057】
一方、対地針路が安定していると判定した場合、船首方位補正装置40は、出力方位が安定しているか否かを判定する(S103)。この判定もS102と同様に、例えば所定時間における対地針路の変化量が所定以内(例えば3°以内)か否かに基づいて行われる。出力方位が不安定と判定される場合、補正する対象の値が明確に定まらないと考えられるので、船首方位補正装置40は出力方位の補正を行わない(S108)。
【0058】
一方、出力方位が安定していると判定した場合、船首方位補正装置40は、船速(対地船速又は対水船速)が所定以上であるか否かを判定する(S104)。図6に示すように、船舶は、例えば風や波等の影響によって船首方位以外の向きにも進む。船速が遅い場合は、船首方位の方向にあまり進まないので、風や波等の影響が相対的に大きくなる。従って、船首方位補正装置40は、船速が所定以上でない場合は、出力方位の補正を行わない(S108)。
【0059】
一方、船速が所定以上であると判定した場合、船首方位補正装置40は、出力方位と対地針路の差が第2閾値以上か否かを判定する(S105)。なお、この第2閾値は、後述の第1閾値よりも大きいものとする。出力方位及び対地針路は、通常は同程度の値を示すので、この差が大きい場合、例えば船首方位センサ15の取付向きが大幅にズレていたり、船首方位センサが方位を適切に検出できなくなったりした可能性がある。そのため、船首方位補正装置40は、出力方位と対地針路の差が第2閾値以上である場合、音や光等によって、その旨をユーザに通知する(S110)。
【0060】
一方、船首方位補正装置40は、出力方位と対地針路の差が第2閾値より小さい場合、当該差が第1閾値以上かそうでないかを判定する(S106)。この第1閾値は、補正の要否を判断するための閾値であるので、第1閾値としては第2閾値よりも相当に小さい値が設定される。そして、船首方位補正装置40は、出力方位と対地針路の差が第1閾値より小さい場合、補正の必要がない程度の誤差であるので、補正を行わない(S108)。
【0061】
一方、船首方位補正装置40は、出力方位と対地針路の差が第1閾値以上である場合、対地針路と比較して出力方位が不安定か否かを判定する(S107)。この判定は、S102及びS103の判定で用いた変化量に基づいて行われる。また、対地針路と出力方位とは通常同じ挙動を示すので、対地針路だけが安定で出力方位が不安定である場合、例えば船首方位センサ15の固定が緩み、ガタつき等が発生している可能性がある。そのため、船首方位補正装置40は、対地針路と比較して出力方位が不安定と判定した場合、音や光等によって、その旨をユーザに通知する(S110)。一方、船首方位補正装置40は、対地針路と比較して出力方位が不安定でないと判定した場合、上述のように、出力方位と対地針路との差をなくすように補正量を設定して、出力方位を補正する(S109)。
【0062】
以上のように、判定を行うことにより、出力方位を自動的かつ精度良く補正することができる。また、出力方位を補正するか否かについての判定は、上記に限られず適宜の方法を用いることができる。例えば、図7に示すように、風の向き及び強さを検出する風向風速計17と、潮流(海流も含む)の向き及び強さを検出する潮流計18と、を備え、これらが検出した結果に基づいて判定を行っても良い。
【0063】
例えば、風又は潮の向きが船首方位と垂直である場合(図6(b)に示す場合)、船舶は、船首方位と異なる方向へ移動し易くなる。一方、風又は潮の向きが船首方位と平行である場合、船舶は、船首方位と異なる方向へ移動しにくくなる。また、風や潮の強さが大きい場合も、船首方位と異なる方向へ移動し易くなる。以上の点を考慮して条件を設定して、当該条件を満たした場合にのみ出力方位の補正を行う構成とすることができる。
【0064】
以上に説明したように、船首方位補正装置40は、出力方位取得部41と、対地針路取得部42と、補正部43と、を備える。出力方位取得部41は、船首方位センサ15が出力する方位である出力方位を取得する。対地針路取得部42は、GPSアンテナ12の検出結果に基づいて得られる対地針路を取得する。補正部43は、出力方位と対地針路との差に基づいて、当該差を小さくするように出力方位を補正する。
【0065】
これにより、GPSアンテナ12によって得られた対地針路との比較に基づいて出力方位が補正されるため、精度の高い出力方位(船首方位とのズレがゼロ又は微小である出力方位)を他の舶用機器(表示装置11等)に提供することができる。また、ユーザによる出力方位の補正作業の手間を省くことができる。
【0066】
以上に本発明の好適な実施の形態を説明したが、上記の構成は例えば以下のように変更することができる。
【0067】
上記実施形態では、GNSSの一例としてGPSを用いた実施例を説明したが、他のGNSSを用いる構成であっても良いことは勿論である。
【0068】
対地針路及び出力方位が安定しているか否かを判定する方法は、上記で示した例に限られない。また、第1閾値及び第2閾値として設定する値や、船速を判定する場合の基準となる速度についても、任意に設定することができる。
【符号の説明】
【0069】
1 舶用機器ネットワークシステム
10 舶用ネットワーク
11 表示装置
12 GPSアンテナ(GNSSセンサ)
13 レーダアンテナ
14 魚群探知機
15 船首方位センサ
16 自動操舵装置
17 風向風速計
18 潮流計
40 船首方位補正装置
41 出力方位取得部
42 対地針路取得部
43 補正部
51 補正量記憶部
【特許請求の範囲】
【請求項1】
船首方位センサが出力する方位である出力方位を取得する出力方位取得部と、
GNSSセンサの検出結果に基づいて得られる対地針路を取得する対地針路取得部と、
前記出力方位と前記対地針路との差に基づいて、当該差を小さくするように前記出力方位を補正する補正部と、
を備えることを特徴とする船首方位補正装置。
【請求項2】
請求項1に記載の船首方位補正装置であって、
前記補正部は、前記対地針路が安定していると判定したときに、前記出力方位の補正を行うことを特徴とする船首方位補正装置。
【請求項3】
請求項1又は2に記載の船首方位補正装置であって、
前記補正部は、前記出力方位が安定していると判定したときに、前記出力方位の補正を行うことを特徴とする船首方位補正装置。
【請求項4】
請求項1から3までの何れか一項に記載の船首方位補正装置であって、
前記補正部は、船速が所定の速度よりも速いときに、前記出力方位の補正を行うことを特徴とする船首方位補正装置。
【請求項5】
請求項1から4までの何れか一項に記載の船首方位補正装置であって、
前記補正部は、補正を行うか否かを決定するための閾値よりも前記出力方位と前記対地針路との差が大きいときに、前記出力方位の補正を行うことを特徴とする船首方位補正装置。
【請求項6】
請求項1から5までの何れか一項に記載の船首方位補正装置であって、
前記補正部は、潮流の強さ及び自船に対する潮流の向きに基づいて、前記出力方位の補正を行うか否かを決定することを特徴とする船首方位補正装置。
【請求項7】
請求項1から6までの何れか一項に記載の船首方位補正装置であって、
前記補正部は、風の強さ及び自船に対する風の向きに基づいて、前記出力方位の補正を行うか否かを決定することを特徴とする船首方位補正装置。
【請求項8】
請求項1から7までの何れか一項に記載の船首方位補正装置であって、
通知を行うか否かを決定するための閾値よりも前記出力方位と前記対地針路との差が大きいときに、通知を行うことを特徴とする船首方位補正装置。
【請求項9】
請求項1から8までの何れか一項に記載の船首方位補正装置であって、
前記対地針路と比較して前記出力方位が不安定であると判定したときに通知を行うことを特徴とする船首方位補正装置。
【請求項10】
コンピュータに、
船首方位センサが出力する方位である出力方位を取得する出力方位取得手順と、
GNSSセンサの検出結果に基づいて得られる対地針路を取得する対地針路取得手順と、
前記出力方位と前記対地針路との差に基づいて、当該差を小さくするように前記出力方位を補正する補正手順と、
を実行させる船首方位補正プログラム。
【請求項11】
船首方位センサが出力する方位である出力方位を取得する出力方位取得工程と、
GNSSセンサの検出結果に基づいて得られる対地針路を取得する対地針路取得工程と、
前記出力方位と前記対地針路との差に基づいて、当該差を小さくするように前記出力方位を補正する補正工程と、
を含むことを特徴とする船首方位補正方法。
【請求項1】
船首方位センサが出力する方位である出力方位を取得する出力方位取得部と、
GNSSセンサの検出結果に基づいて得られる対地針路を取得する対地針路取得部と、
前記出力方位と前記対地針路との差に基づいて、当該差を小さくするように前記出力方位を補正する補正部と、
を備えることを特徴とする船首方位補正装置。
【請求項2】
請求項1に記載の船首方位補正装置であって、
前記補正部は、前記対地針路が安定していると判定したときに、前記出力方位の補正を行うことを特徴とする船首方位補正装置。
【請求項3】
請求項1又は2に記載の船首方位補正装置であって、
前記補正部は、前記出力方位が安定していると判定したときに、前記出力方位の補正を行うことを特徴とする船首方位補正装置。
【請求項4】
請求項1から3までの何れか一項に記載の船首方位補正装置であって、
前記補正部は、船速が所定の速度よりも速いときに、前記出力方位の補正を行うことを特徴とする船首方位補正装置。
【請求項5】
請求項1から4までの何れか一項に記載の船首方位補正装置であって、
前記補正部は、補正を行うか否かを決定するための閾値よりも前記出力方位と前記対地針路との差が大きいときに、前記出力方位の補正を行うことを特徴とする船首方位補正装置。
【請求項6】
請求項1から5までの何れか一項に記載の船首方位補正装置であって、
前記補正部は、潮流の強さ及び自船に対する潮流の向きに基づいて、前記出力方位の補正を行うか否かを決定することを特徴とする船首方位補正装置。
【請求項7】
請求項1から6までの何れか一項に記載の船首方位補正装置であって、
前記補正部は、風の強さ及び自船に対する風の向きに基づいて、前記出力方位の補正を行うか否かを決定することを特徴とする船首方位補正装置。
【請求項8】
請求項1から7までの何れか一項に記載の船首方位補正装置であって、
通知を行うか否かを決定するための閾値よりも前記出力方位と前記対地針路との差が大きいときに、通知を行うことを特徴とする船首方位補正装置。
【請求項9】
請求項1から8までの何れか一項に記載の船首方位補正装置であって、
前記対地針路と比較して前記出力方位が不安定であると判定したときに通知を行うことを特徴とする船首方位補正装置。
【請求項10】
コンピュータに、
船首方位センサが出力する方位である出力方位を取得する出力方位取得手順と、
GNSSセンサの検出結果に基づいて得られる対地針路を取得する対地針路取得手順と、
前記出力方位と前記対地針路との差に基づいて、当該差を小さくするように前記出力方位を補正する補正手順と、
を実行させる船首方位補正プログラム。
【請求項11】
船首方位センサが出力する方位である出力方位を取得する出力方位取得工程と、
GNSSセンサの検出結果に基づいて得られる対地針路を取得する対地針路取得工程と、
前記出力方位と前記対地針路との差に基づいて、当該差を小さくするように前記出力方位を補正する補正工程と、
を含むことを特徴とする船首方位補正方法。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】

【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−79815(P2013−79815A)
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願番号】特願2011−218621(P2011−218621)
【出願日】平成23年9月30日(2011.9.30)
【出願人】(000166247)古野電気株式会社 (441)
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願日】平成23年9月30日(2011.9.30)
【出願人】(000166247)古野電気株式会社 (441)
[ Back to top ]