
芝刈機、目標板の位置座標の測位方法
【課題】 1周波型のRTK方式においてサイクルスリップが生じ、RTK測位が中断しても容易、かつ短時間で初期化でき、再び速やかに芝刈作業を行い得る芝刈機を提供する。
【解決手段】 1周波型のGPS装置を搭載し、初期化後、RTK測位をしながら電波航法にて走行する芝刈機において、前記芝刈機には、予めGPS位置座標が特定された目標板を撮像し、その画像を取り込み目標との距離を求めるための2眼カメラが搭載され、前記RTK測位が中断した場合、前記2眼カメラにより前記目標板を撮像し、その画像を取り込み芝刈機に設けられた制御装置の画像解析部で解析し、かつ演算部で演算処理して前記目標板から前記芝刈機搭載のGPS装置までの距離を計測し、測位を行う構成とした。
【解決手段】 1周波型のGPS装置を搭載し、初期化後、RTK測位をしながら電波航法にて走行する芝刈機において、前記芝刈機には、予めGPS位置座標が特定された目標板を撮像し、その画像を取り込み目標との距離を求めるための2眼カメラが搭載され、前記RTK測位が中断した場合、前記2眼カメラにより前記目標板を撮像し、その画像を取り込み芝刈機に設けられた制御装置の画像解析部で解析し、かつ演算部で演算処理して前記目標板から前記芝刈機搭載のGPS装置までの距離を計測し、測位を行う構成とした。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、ゴルフ場の芝を自動的に刈ることのできるGPS装置を搭載した芝刈機や、この芝刈機を用いて初期位置計測用の目標板のGPS位置座標を計測する測位方法に関する。
【背景技術】
【0002】
ゴルフ場用の芝刈機に、走行中の現在位置を知るためのGPS装置を搭載し、GPS測位をしながら芝を刈る芝刈機がある。GPS装置は、電波航法装置とも呼ばれ、この装置は、GPSアンテナやGPS受信機等を包有してなり、GPS衛星からのGPS電波を受信し、芝刈機の現在位置を演算して測位し、電波航法による無人運転を行う装置である。
【0003】
従来、GPS測位において、単独測位では得られないような高い精度が求められるような場合には、一般的に単独測位より高精度な相対測位が行われ、長時間静止した状態でGPS衛星からの搬送波を受信し、いわゆる整数値バイアスを解くことで高精度の測位を実現しているキネマティック測位が実用化されている。
【0004】
キネマティック測位の中でもリアルタイムキネマティック測位(RTKという)は、移動局として機能するGPS装置を搭載した移動自在な芝刈機のほかに固定局を設置し、使用前に静止測位を行い、その後、固定局から移動局としての芝刈機に無線送信するデータを用い芝刈機の位置をリアルタイムに測位する方式であり、この方式を用いれば、cmオーダーの測位精度がリアルタイムで求められるため、種々の移動体の高精度な測位に使用されている。
【0005】
このGPS装置には、1周波型(L1帯1575.42MHzを利用するもの)と、L1帯の他L2帯(1227.6MHzを利用するもの)を受信する2周波型と、3周波以上衛星電波を利用する多周波型が存在するが、前者の1周波型が安価である。
【0006】
1周波方式のRTK−GPS測位は、整数値バイアスの決定(以下、初期化という)の際、静止測位を行い、固定局と移動局との受信電波の位相差により、相対位置(基線ベクトル)を求める。この場合、長時間観測によるGPS衛星の移動を利用するため、初期化には、十数分前後の時間が必要となる。
【特許文献1】特開平9−28115号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかるに、従来の1周波型のRTK方式による測位では、GPS衛星からの電波に対し、障害物や雑音電波、多重反射などの影響により受信が瞬時的に中断すると、整数値バイアスの情報が失われる、いわゆるサイクルスリップが生じる。このようなサイクルスリップが生じると、RTK測位が中断してしまう。
【0008】
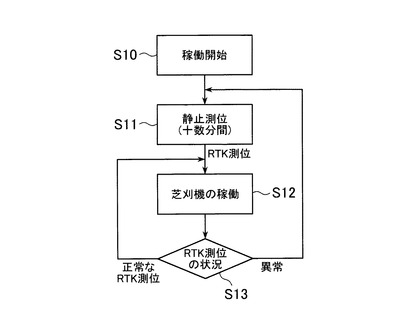
すなわち、図12は、従来の1周波型のRTK測位の手順を示す。
【0009】
まず、稼動開始(ステップS10)において、静止測位(ステップS11)を行う。この場合、十数分間の時間を要する。
【0010】
静止測位後、RTK測位を行う。
【0011】
これによって芝刈機を稼動し、走行における現在位置を認識しながら芝刈り作業を行えるようになる(ステップS12)。
【0012】
RTK測位の状況において(ステップS13)、測位に問題がなく正常であれば芝刈機を稼動し続けることができる。
【0013】
一方、サイクルスリップが生じたような異常事態には、RTK測位が中断してしまうため、芝刈機の位置がわからなくなり、作業に支障をきたす。
【0014】
再稼動させるためには、再びステップS11における静止測位を行い、それを基にRTK測位復帰といった手順を要し、初期化に時間がかかるという課題があった。
【0015】
また、上記先行例(特開平9−28115)では、サイクルスリップが生じ、RTK測位が中断した場合、それをどのように解決するかについての手段が示されておらず、GPS装置が利用できなくなったとき、自律航法装置による運転に切り換えていた。
【0016】
このため、絶対的な位置が把握できず、かつ構成が煩雑であるという課題があった。
【0017】
この発明は上記のことに鑑み提案されたもので、その目的とするところは、1周波型を用いたRTK方式の芝刈機において、サイクルスリップが生じ、RTK測位が中断しても容易、かつ短時間で初期化できる芝刈機の測位方法を提供することにある。
また、他の目的として、初期位置計測用のマーク板としての目標板を新たに設けた場合、そのGPS位置座標をRTK測位中の芝刈機によって目標板のGPS位置座標を特定する方法を提供するにある。
【課題を解決するための手段】
【0018】
請求項1の発明は、1周波型のGPS装置を搭載し、静止測位後、RTK測位をしながら電波航法にて走行する芝刈機において、前記芝刈機には、予めGPS位置座標が特定された目標板を撮像し、その画像を取り込み目標との距離を計測するための2眼カメラが搭載され、前記RTK測位が中断した場合、前記2眼カメラにより前記目標板を撮像し、その画像を取り込み芝刈機に設けられた制御装置の画像解析部で解析し、かつ演算部で演算処理して前記目標板から前記芝刈機搭載のGPS装置までの距離を計測し、GPS装置の初期化を行うことを特徴とする。
請求項2の発明は、請求項1記載の芝刈機の測位方法において、前記目標板は黒色系をなし、かつ目標板には予め位置座標が特定された赤色系の第1、第2のポイントが設けられたことを特徴とする。
請求項3の発明は、GPS装置および目標板を撮像し、その画像を取り込み目標板との間の距離を計測するための2眼カメラが搭載され、RTK測位にある芝刈機により新たに別途設けた目標板を撮像してその画像を取り込み、画像を解析して演算処理し、前記目標板のGPS位置座標を特定することを特徴とする。
【発明の効果】
【0019】
以上のように本発明によれば、RTK測位が中断した場合、従来のようにGPS衛星の移動を利用しなくても芝刈機3に設けた2眼カメラ6により、所定の場所に設置され、予め位置座標が特定された目標板5を撮像することにより、芝刈機が搭載した1周波型のGPS装置の初期化を短時間で行うことができる。
また、目標板に撮像用のポイントを設ける場合、目標板は黒色系とし、ポイントは赤色系とすると、ゴルフ場の緑色の芝に対し、赤色系は補色であるため、明確にポイントを撮像し、その画像を取り込むことができる。
さらに、芝刈機はGPS装置を搭載し、かつ位置座標計測用の2眼カメラも搭載しているため、新たに別の初期位置測定用のマーク板としての目標板を設置した場合、RTK測位にある芝刈機を用いて目標板のGPS位置座標を容易に計測することもできる。
【発明を実施するための最良の形態】
【0020】
以下、図面に沿って、本発明の実施例を説明する。
【実施例1】
【0021】
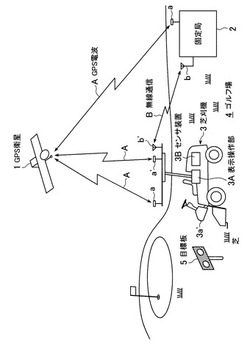
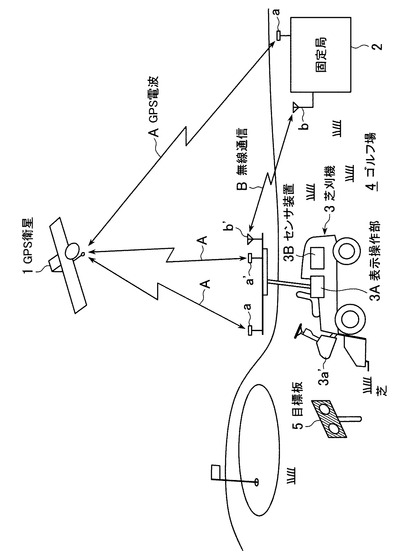
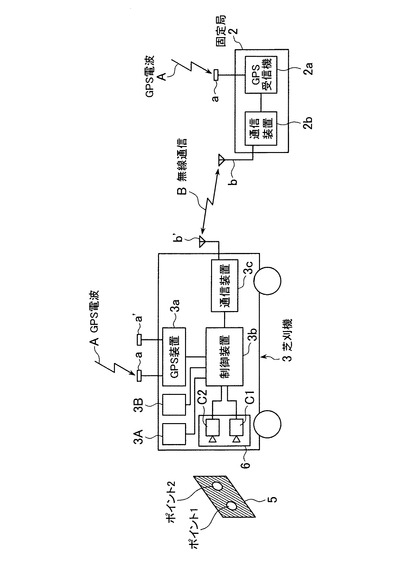
図1は本発明の全体システムの説明図である。
本発明の芝刈機3は、GPS装置を搭載した自律走行型の芝刈機であって、例えばゴルフ場の指定領域内の芝を無人で刈るようにしたものである。
【0022】
図中、1は複数個のGPS衛星(図示では1つのみ示す)、2はGPS衛星1からのGPS電波AをGPSアンテナaを介し受信する固定局、3は、例えばゴルフ場4の指定領域内を走行自在な移動局としての上記芝刈機で、GPS衛星1からのGPS電波Aを受ける第1、第2の2つのGPSアンテナa、a’を介しGPS電波Aが入力されるGPS受信機等を有するGPS装置3a(図4参照)が搭載されている。また、固定局2に設けられた無線通信用のアンテナbから発せられる無線通信Bを受けるアンテナb’を有し、GPS衛星1からの位置情報等を基にRTK測位しながら走行する。芝刈機3に2つのGPSアンテナa、a’を設け、それぞれからGPS電波Aを受けるようにしたのは芝刈機3の方向角がわかるようにしたためである。ここで方向角とは、一般に座標平面上の縦軸(真北)を基準とし、そこからある直線まで右回りに測った角のことである。そして、GPSアンテナa、a’を設けることによって、上記方向角の定義の座標平面上において、方向角は、GPSアンテナa、a’がなす線分と座標上の真北とのなす角度により求められる。
【0023】
GPS衛星1は、前述のように周波数の異なるL1波、L2波を発信しており、L1波、L2波を同時に受信するものを2周波方式、L1波のみを受信するものを1周波方式というが、本発明のGPS装置では、GPS受信機価格が安価である1周波方式を採用している。
【0024】
芝刈機3は、走行用の駆動エンジンまた電動モータの如き駆動手段、走行用のタイヤ、芝刈り用の刈刃、集草バケット等が設けられ、かつ上述のように、GPS衛星1からのGPS電波Aと、固定局2からの電波を受け、自動運転する電波航法装置、すなわちGPS装置3aを備えているほか、自律走行に必要なセンサ装置3Bを備え自立走行用型となっており、また、マニュアル運転もできるよう、座席、ハンドル等の操作手段を備えている。
【0025】
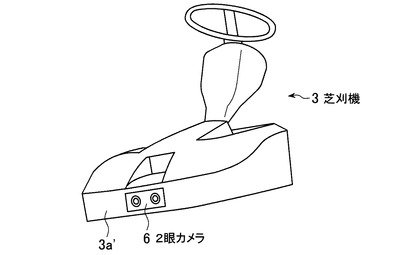
5は所定の場所に設けられ、第1、第2のポイント1、2が設けられた目標板で、移動局である芝刈機3の初期位置測定用のマーク板として機能する。この目標板5は適宜の場所にそれぞれ設けられている。芝刈機3の前部3a’には、図2に示すように、目標板5を撮像する2眼カメラ6が設けられている。
【0026】
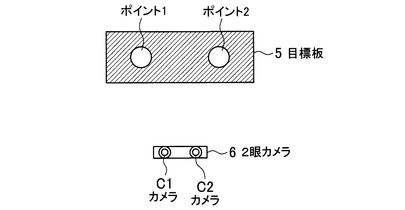
2眼カメラ6は、一般的にステレオカメラとも称され、2つのカメラC1、C2で被写体(目標板5、第1のポイント1、第2のポイント2)を撮像する。このステレオカメラは、一般に、画像による3次元計測技術として、2台のカメラC1、C2で対象物を異なる位置から撮像した一対の画像の相関を求め、同一物に対する視差からステレオカメラの取付位置や焦点距離等のカメラパラメータを用いて三角測量により距離を求める場合に使用される。
【0027】
本発明では、ステレオカメラである2眼カメラ6より、予めGPS位置座標がわかっている目標板5の第1、第2のポイント1、2を撮像し、2眼カメラ6の三次元位置からGPS座標系に変換するようにしている。
【0028】
また、芝刈機3には、タッチパネル式の表示・操作部3Aが搭載されている。
【0029】
目標板5は横長矩形をなし、第1、第2のポイント1、2はほぼ円形となっている。第1、第2のポイント1、2は好ましくは赤色系、その周囲の背景は黒色系となっている。
【0030】
第1、第2のポイント1、2を赤色とすると、ゴルフコース内で最も多い色はグリーン(芝)の「緑」であり、「緑」に対する補色は「赤」のため、明確に撮像して画像を取り込むことができるためである。なお、補色とは、色相環で正反対に位置する色のことである。また、背景を「黒」とすると、太陽光による反射が少なく、好ましい。さらに、第1、第2のポイント1、2を円形としたのは、各ポイント1、2の中心位置の計算が他の形状に比べ容易なためである。なお、目標板5の形状、背景およびポイントの色は黒、赤に限定されるものではない。
【0031】
この発明は、RTK測位が中断した場合、芝刈機3を目標板5まで移動させ、2眼カメラ6でGPS位置座標が既知の目標板5を撮像し、その画像を解析して処理することにより、芝刈機搭載のGPS装置3aを初期化することに特徴を有している。
【0032】
また、RTK測位中のGPS装置塔載の芝刈機3を、新たに目標板5を設置した場合にそのGPS位置座標を求めることに使用することについても特徴を有している。
【0033】
図4は、固定局2の構成、移動局としての芝刈機3の構成をブロックで示す。
【0034】
固定局2はゴルフ場の適宜の場所に設けられ、GPSアンテナaを介しGPS電波Aを受けるGPS装置2aと、このGPS装置2aからのデータを芝刈機3側に送信する第1の通信装置2bを備えている。
【0035】
芝刈機3には、第1、第2のGPSアンテナa、a’を介し受信したGPS電波Aを受けるGPS装置3aが搭載され、このGPS装置3aからの出力信号は芝刈機3に設けられた制御装置3bに送出される。この制御装置3bには、第1の通信装置2bからの無線通信Bを通信アンテナb’を介し受信する第2の通信装置3cからの出力信号も送出される。また、2眼カメラ6の第1、第2のカメラC1、C2によって目標板5の第1、第2のポイント1、2を撮像したGPS位置情報も入力される。
【0036】
目標板5の第1、第2のポイント1、2の中心の位置座標は予め計測され既知となっている。また、2眼カメラ6からの第1、第2のGPSアンテナa、a’までの距離も既知となっており、制御装置3bに入力されている。
【0037】
制御装置3bには、GPS装置3a、2眼カメラ6からの位置情報、通信装置3cからのデータ等も入力され、サイクルスリップが生じた場合、2眼カメラ6からの画像を解析し演算処理し、RTK測位を行う。また、制御装置3bには表示・操作装置3A、センサ装置3Bからの出力信号も入力される。
【0038】
RTK測位とは、干渉測位の一つで移動局(芝刈機3)の他、固定局2を設ける。干渉測位では搬送波波長の整数値バイアスを決定する必要があるが、RTK方式では観測開始時に初期化を行い、以降は芝刈機3側に搭載しているGPS装置3aと固定局2側の第1のGPS装置2a間での無線通信Bを介し観測データの交信を行い、芝刈機3側に搭載した制御装置3bにおいて、GPS装置3aとGPS装置2aからのデータとともに所定の演算を行い、芝刈機3の走行に必要な位置を実時間で算出する。
【0039】
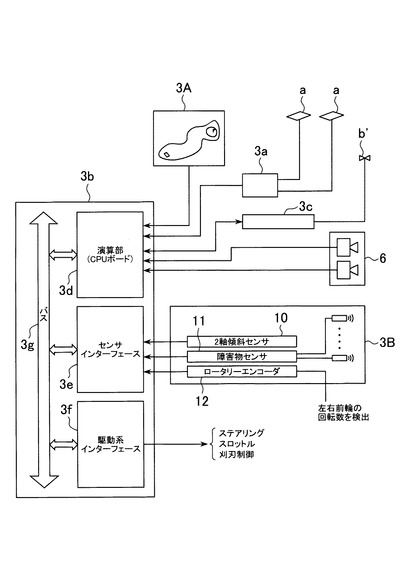
図5は制御装置3bとセンサ装置3Bの構成を示す。
【0040】
制御装置3bは、2眼カメラ6で取り込まれた画像を解析する画像解析部(図示せず)、その後段に設けられた演算部3d、センサインターフェース3e、駆動系インタフェース3f等を備え、これらはバス3gによって接続され、必要な各種データが送受される。なお、制御装置3bの演算部3dには、予め計測された目標板5の第1、第2のポイント1、2のGPS位置座標や2眼カメラ6とGPSアンテナa、a’間の距離が入力され、格納されている。
【0041】
そして、制御装置3bには、表示・操作装置3A、GPS装置3a、通信装置3c、2眼カメラ6からの出力信号も入力される。
【0042】
センサインターフェース3eには、センサ装置3Bを構成する地形の傾斜を検知する2軸傾斜センサ10、障害物の有無を検知する障害物センサ11、芝刈機左右の前輪の回転数を検出するロータリーエンコーダ12等の出力が入力され、処理される。
【0043】
そして、駆動系インターフェース3fからの制御信号によってステアリング、スロットル、刈刃等の制御が行われる。
【0044】
ゴルフ場の芝刈りにあたっては、タッチパネル式の表示・操作装置3Aの表示部には、ゴルフ場の芝刈りルートの図が示されており、予め作成されたデジタルマップ上の芝刈り経路をオペレーターが入力する。一般的にデジタルマップとは、情報がデジタル化された電子地図のことで、編集・加工が容易で、ネットワークなどを介して情報の共有が可能など多くの特徴を持つ。本芝刈機に関しては、領域内(フェアウエイ)境界のGPS位置座標、領域内(フェアウエイ)の障害物のGPS位置座標、領域内の芝刈り方向パターンを有している。デジタルマップのデータは制御装置3b内に格納されている。また、演算部3dのCPUボードには予め自律走行用の所定のプログラムが組み込まれ、芝刈機3は、入力された経路にしたがってGPS装置3a、センサ装置3B等の情報をもとに自己位置を測位しながら無人運転による自動走行し、芝刈り作業を行う。
【0045】
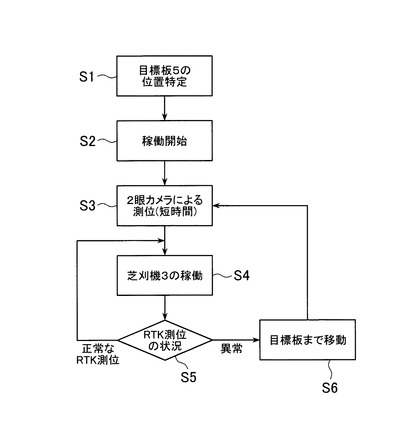
図6は、目標板5のGPS位置座標の特定ないし芝刈機3の芝刈り作業のフローチャートを示す。まずステップS1に示すように、目標板5のGPS位置座標を特定する。この特定にあたっては、別のGPS装置と固定局とを使用し、RTK測位によって目標板5のGPS位置座標を知ることができ特定することができ、それを制御装置3bに予め入力する。
【0046】
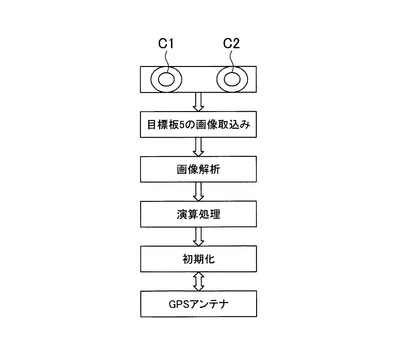
ステップS2の稼動開始にあたり、芝刈機3を静止状態として2眼カメラ6を目標板5に向け、表示・操作装置3Aを介しオペレーターの操作により初期化の指示が与えられると、ステップS3に示すように、2眼カメラ6のカメラC1、C2により、目標板5およびGPS位置座標が既知の第1、第2のポイント1、2を撮像する。2眼カメラ6はその画像を取り込み、制御装置3bの画像解析部にデータを送出する。画像解析部でその画像を解析し、演算部3dにて演算処理が行われ、第1、第2のポイント1、2と2眼カメラ6との間の距離を算出する。2眼カメラ6からGPS装置3aのGPSアンテナa、a’の距離は予め既知で特定されているため、目標板5から2眼カメラ6までの距離の算出値に、2眼カメラ6からGPSアンテナa、a’までの距離を加算すれば、GPSアンテナa、a’のGPS位置座標が正確に算出でき、初期化作業を短時間で行うことができる。RTK測位中断において、目標板5と2眼カメラ6を用いてのRTK測位状態への復帰時間、すなわち再初期化に要する時間は、約26秒で完了した。
【0047】
図7はそのフローチャートを示す。初期化後、ステップS4に示すように、芝刈機3を稼動する。
【0048】
再び図6において、芝刈機3の走行中は、芝刈機3はGPS装置3aによる位置データと固定局2間での無線通信Bのデータにより自らの正確な位置検出を行いながら芝刈機3は走行し、芝刈り作業を行う。
【0049】
そして、ステップS5に示すように、芝刈機3はRTK測位しながら芝刈り作業を行い、測位が正常であれば芝刈機3は稼動し続ける。
【0050】
一方、何らかの理由でRTK測位が中断した場合、ステップS6に示すように、人力によって芝刈機3をGPS位置座標が既知である近くの目標板5まで移動させる。
【0051】
そして、ステップS3に示すように、芝刈機3に搭載した2眼カメラ6により目標板5の第1、第2のポイント1、2を撮像し、目標板5と2眼カメラ6との正確な位置関係を制御装置3bで演算し、求めた位置のデータを制御装置3bからGPS装置3aに送ることにより、従来のように数十分の静止測位を行うことなく短時間で初期化できRTK測位状態への復帰を行うことができる。
【0052】
次に、2眼カメラ6によって目標板5を撮像し、目標板5と2眼カメラ6との間の距離を計測する方法について説明する。
【0053】
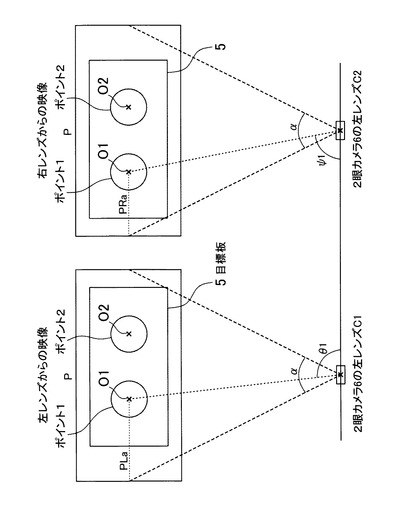
図8において左側は、2眼カメラ6の左レンズC1で目標板5および第1のポイント1の中心01を見た場合の映像、右側は右レンズC2での目標板5および第1のポイント1の中心01を見た場合の映像を示す。
【0054】
図において、
α:第1、第2のカメラC1、C2の視野角(rad)
P:カメラ画像の水平方向Pixel数
PLa:左カメラC1の画像の左端から対象の第1のポイント1の中心01までのPixel数
PRa:右カメラC2の画像の左端から対象の第1のポイント1の中心01までのPixel数

である。
【0055】
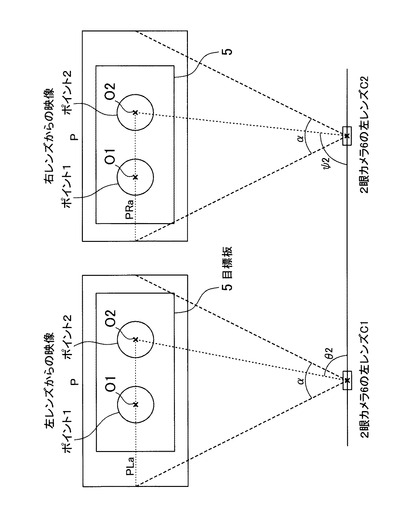
図9において左側は2眼カメラ6の左レンズC1で目標板5および第2のポイント2等を見た場合の映像、右側は右レンズC2で目標板5および第2のポイント2等を見た場合の映像を示す。
【0056】
図において、
α:カメラC1、C2の視野角(rad)
P:カメラ画像の水平方向Pixel数
PLb:左カメラC1の画像の左端から対象の第2のポイント2の中心02までのPixel数
PRb:右カメラC2の画像の左端から対象の第2のポイント2の中心02までのPixel数
である。
ここで、PIXELとは、画像を構成する色情報を持った最小単位、つまり画素のことである。また、カラー画素において一つのピクセルは、光の三原色(青・赤・緑)の輝度を持っている。ピクセルは大きさの単位ではないため、表示する媒体により大きさが異なる。本芝刈機に関しては、2眼カメラのPIXELの数、大きさは既知であるため、PIXEL数=距離(長さ)として扱うことが可能となる。
【0057】
図8、図9において、θ1、θ2、ψ1、ψ2の角度は、2眼カメラ6からの撮像より求められる。また、2眼カメラ6の撮像の左端から対象の中心01までの距離は、制御装置3b内に格納された画像認識プログラムによって二値化(白黒化)された撮像から二つの円を認識させ、その円の中心(第1、第2のポイント1、2の中心01、02)を求めることにより得ることができる。なお、画像認識プログラムとは、一般に、入力⇒補正⇒特徴抽出⇒識別⇒認識⇒出力のように幾つかの要素技術の集まりで定義される。まず、実写情景、写真等などから入力系を通して画像信号が得られ、コンピュータで画像処理が可能なように、デジタル化される。次に、歪みやノイズを除き、拡大、縮小、回転など補正処理を施した後、特徴抽出を行って、特徴パラメータあるいは特徴ベクトルを求める。こうして得られた特徴量の中から標準パターンに合致した特徴量、あるいは近い特徴量を識別によって決定、出力している。
【0058】
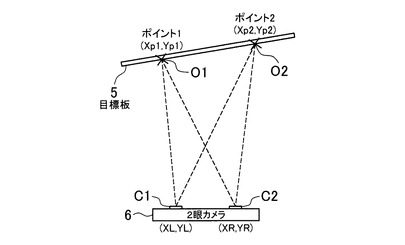
図10は2眼カメラ6を使って目標板5を撮像した状態の説明図を示し、第1のカメラC1(座標XL、YL)、第2のカメラC2(座標XR、YR)で目標板5の第1のポイント1の中心01(座標Xp1、Yp1)、第2のポイント2の中心02(座標Xp2、Yp2)を撮像する。
【0059】
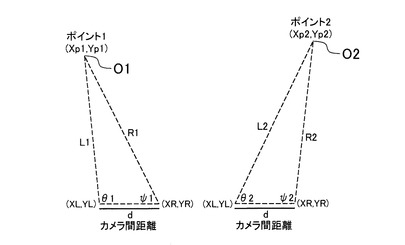
図11は2眼カメラ6を使って正弦定理によって距離の計測を行なう説明図である。θ1、θ2、ψ1、ψ2の角度は2眼カメラ6の撮像より求められる。dは第1、第2のカメラC1、C2間の距離、L1は図示の状態において、左側のカメラC1から第1のポイント1の中心01までの距離、R1は右側のカメラC2から第1のポイント1の中心01までの距離である。また、L2は右側のカメラC2から第2のポイント2の中心02までの距離、R2は右側のカメラC2から第2のポイント2の中心02までの距離である。
【0060】
この図11の状態が制御装置3bの画像解析部で解析される。
【0061】
各距離L1、R1、L2、R2等は次のようにして求めることができる。
【0062】
正弦定理より、
R1/sinθ1=L1/sinψ1=d/sin(π−(θ1+ψ1))
d/sin(π−(θ1+ψ1)=d/sin(θ1+ψ1)より
R1/sinθ1=d/sin(θ1+ψ1)
L1/sinψ1=d/sin(θ1+ψ1)
R1=dsinθ1/sin(θ1+ψ1)
L1=dsinψ1/sin(θ1+ψ1)
【0063】
同様にして、
R2=dsinθ2/sin(θ2+ψ2)
L2=dsinψ2/sin(θ2+ψ2)
【0064】
左カメラC1の座標を(XL、YL)とすると、
第1のポイント1の中心01からの距離がL1、第2のポイント2の中心02からの距離がL2なので、(XL、YL)は次の式を満たす。
(XL−Xp1)2+(YL−Yp1)2=L12
(XL−Xp2)2+(YL−Yp2)2=L22
【0065】
同様にして、右カメラC2の座標(XR、YR)は次の式を満たす。
(XR−Xp1)2+(YR−Yp1)2=R12
(XR−Xp2)2+(YR−Yp2)2=R22
制御装置3bの演算部3dでの演算処理によって(XL、YL)(XR、YR)が確定することにより、2眼カメラ6の現在のGPS位置座標と方向が決まり、RTK測位を復帰、つまり芝刈機3の測位を行うことができる。
【0066】
なお、芝刈機搭載のGPS装置3aの初期化のために使用する目標板5は作業領域に複数個所設ける必要がある。本発明において、別の場所に、新たに目標板5を設置し、そのGPS位置座標の特定にあたり、静止測位によってGPS測位状態とした、GPS装置3a搭載の芝刈機3の2眼カメラ6によって目標板5を撮像すれば、RTK測位により芝刈機3の位置は正確にわかっているため、目標板5の位置を算出してGPS位置座標を特定することができ、芝刈機3をこのように使うこともできる。なお、新たな目標板5のGPS位置座標は、芝刈機3の制御装置3bの演算部3dに入力される。
【0067】
なお、上記実施例では移動局を芝刈機とした場合について説明したが、例えば農業機械などのようなその他の移動体にも適用し得る。
【図面の簡単な説明】
【0068】
【図1】本発明に係るGPS芝刈りシステムの概念の説明図を示す。
【図2】本発明で用いられる芝刈機前部の部分斜視図を示す。
【図3】本発明で用いられる目標板と2眼カメラとの関係を示す。
【図4】本発明で用いられる芝刈機固定局等の各構成をブロックで示した説明図である。
【図5】本発明の制御装置とセンサ装置の構成のブロック図を示す。
【図6】本発明の動作をフローチャートで示す説明図である。
【図7】本発明において、2眼カメラで取り込んだ目標板の撮像から初期化を行うフローチャートを示す。
【図8】本発明において、2眼カメラで目標板を撮像した場合の左右のレンズの映像を示す。
【図9】同じく本発明において、2眼カメラで目標板を撮像した場合の左右のレンズの映像を示す。
【図10】本発明で用いられる芝刈機の2眼カメラで目標板を撮像して目標板と2眼カメラとの距離を測定する状態の説明図を示す。
【図11】同じく本発明において、芝刈機の2眼カメラで目標板を撮像して目標板と2眼カメラとの距離を測定する説明図を示す。
【図12】1周波型のGPS装置でRTK測位を行うフローチャートを示す。
【符号の説明】
【0069】
1 GPS衛星
2 固定局
2a GPS装置
2b 第1の通信装置
3 芝刈機
3a GPS装置
3a’ 芝刈機前部
3b 制御装置
3c 第2の通信装置
3d 演算部
3e センサインターフェース
4 ゴルフ場
5 目標板
6 2眼カメラ
10 2軸傾斜センサ
11 障害物センサ
C1 第1のカメラ
C2 第2のカメラ
a,a’ GPSアンテナ
b,b’ 通信用アンテナ
【技術分野】
【0001】
この発明は、ゴルフ場の芝を自動的に刈ることのできるGPS装置を搭載した芝刈機や、この芝刈機を用いて初期位置計測用の目標板のGPS位置座標を計測する測位方法に関する。
【背景技術】
【0002】
ゴルフ場用の芝刈機に、走行中の現在位置を知るためのGPS装置を搭載し、GPS測位をしながら芝を刈る芝刈機がある。GPS装置は、電波航法装置とも呼ばれ、この装置は、GPSアンテナやGPS受信機等を包有してなり、GPS衛星からのGPS電波を受信し、芝刈機の現在位置を演算して測位し、電波航法による無人運転を行う装置である。
【0003】
従来、GPS測位において、単独測位では得られないような高い精度が求められるような場合には、一般的に単独測位より高精度な相対測位が行われ、長時間静止した状態でGPS衛星からの搬送波を受信し、いわゆる整数値バイアスを解くことで高精度の測位を実現しているキネマティック測位が実用化されている。
【0004】
キネマティック測位の中でもリアルタイムキネマティック測位(RTKという)は、移動局として機能するGPS装置を搭載した移動自在な芝刈機のほかに固定局を設置し、使用前に静止測位を行い、その後、固定局から移動局としての芝刈機に無線送信するデータを用い芝刈機の位置をリアルタイムに測位する方式であり、この方式を用いれば、cmオーダーの測位精度がリアルタイムで求められるため、種々の移動体の高精度な測位に使用されている。
【0005】
このGPS装置には、1周波型(L1帯1575.42MHzを利用するもの)と、L1帯の他L2帯(1227.6MHzを利用するもの)を受信する2周波型と、3周波以上衛星電波を利用する多周波型が存在するが、前者の1周波型が安価である。
【0006】
1周波方式のRTK−GPS測位は、整数値バイアスの決定(以下、初期化という)の際、静止測位を行い、固定局と移動局との受信電波の位相差により、相対位置(基線ベクトル)を求める。この場合、長時間観測によるGPS衛星の移動を利用するため、初期化には、十数分前後の時間が必要となる。
【特許文献1】特開平9−28115号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかるに、従来の1周波型のRTK方式による測位では、GPS衛星からの電波に対し、障害物や雑音電波、多重反射などの影響により受信が瞬時的に中断すると、整数値バイアスの情報が失われる、いわゆるサイクルスリップが生じる。このようなサイクルスリップが生じると、RTK測位が中断してしまう。
【0008】
すなわち、図12は、従来の1周波型のRTK測位の手順を示す。
【0009】
まず、稼動開始(ステップS10)において、静止測位(ステップS11)を行う。この場合、十数分間の時間を要する。
【0010】
静止測位後、RTK測位を行う。
【0011】
これによって芝刈機を稼動し、走行における現在位置を認識しながら芝刈り作業を行えるようになる(ステップS12)。
【0012】
RTK測位の状況において(ステップS13)、測位に問題がなく正常であれば芝刈機を稼動し続けることができる。
【0013】
一方、サイクルスリップが生じたような異常事態には、RTK測位が中断してしまうため、芝刈機の位置がわからなくなり、作業に支障をきたす。
【0014】
再稼動させるためには、再びステップS11における静止測位を行い、それを基にRTK測位復帰といった手順を要し、初期化に時間がかかるという課題があった。
【0015】
また、上記先行例(特開平9−28115)では、サイクルスリップが生じ、RTK測位が中断した場合、それをどのように解決するかについての手段が示されておらず、GPS装置が利用できなくなったとき、自律航法装置による運転に切り換えていた。
【0016】
このため、絶対的な位置が把握できず、かつ構成が煩雑であるという課題があった。
【0017】
この発明は上記のことに鑑み提案されたもので、その目的とするところは、1周波型を用いたRTK方式の芝刈機において、サイクルスリップが生じ、RTK測位が中断しても容易、かつ短時間で初期化できる芝刈機の測位方法を提供することにある。
また、他の目的として、初期位置計測用のマーク板としての目標板を新たに設けた場合、そのGPS位置座標をRTK測位中の芝刈機によって目標板のGPS位置座標を特定する方法を提供するにある。
【課題を解決するための手段】
【0018】
請求項1の発明は、1周波型のGPS装置を搭載し、静止測位後、RTK測位をしながら電波航法にて走行する芝刈機において、前記芝刈機には、予めGPS位置座標が特定された目標板を撮像し、その画像を取り込み目標との距離を計測するための2眼カメラが搭載され、前記RTK測位が中断した場合、前記2眼カメラにより前記目標板を撮像し、その画像を取り込み芝刈機に設けられた制御装置の画像解析部で解析し、かつ演算部で演算処理して前記目標板から前記芝刈機搭載のGPS装置までの距離を計測し、GPS装置の初期化を行うことを特徴とする。
請求項2の発明は、請求項1記載の芝刈機の測位方法において、前記目標板は黒色系をなし、かつ目標板には予め位置座標が特定された赤色系の第1、第2のポイントが設けられたことを特徴とする。
請求項3の発明は、GPS装置および目標板を撮像し、その画像を取り込み目標板との間の距離を計測するための2眼カメラが搭載され、RTK測位にある芝刈機により新たに別途設けた目標板を撮像してその画像を取り込み、画像を解析して演算処理し、前記目標板のGPS位置座標を特定することを特徴とする。
【発明の効果】
【0019】
以上のように本発明によれば、RTK測位が中断した場合、従来のようにGPS衛星の移動を利用しなくても芝刈機3に設けた2眼カメラ6により、所定の場所に設置され、予め位置座標が特定された目標板5を撮像することにより、芝刈機が搭載した1周波型のGPS装置の初期化を短時間で行うことができる。
また、目標板に撮像用のポイントを設ける場合、目標板は黒色系とし、ポイントは赤色系とすると、ゴルフ場の緑色の芝に対し、赤色系は補色であるため、明確にポイントを撮像し、その画像を取り込むことができる。
さらに、芝刈機はGPS装置を搭載し、かつ位置座標計測用の2眼カメラも搭載しているため、新たに別の初期位置測定用のマーク板としての目標板を設置した場合、RTK測位にある芝刈機を用いて目標板のGPS位置座標を容易に計測することもできる。
【発明を実施するための最良の形態】
【0020】
以下、図面に沿って、本発明の実施例を説明する。
【実施例1】
【0021】
図1は本発明の全体システムの説明図である。
本発明の芝刈機3は、GPS装置を搭載した自律走行型の芝刈機であって、例えばゴルフ場の指定領域内の芝を無人で刈るようにしたものである。
【0022】
図中、1は複数個のGPS衛星(図示では1つのみ示す)、2はGPS衛星1からのGPS電波AをGPSアンテナaを介し受信する固定局、3は、例えばゴルフ場4の指定領域内を走行自在な移動局としての上記芝刈機で、GPS衛星1からのGPS電波Aを受ける第1、第2の2つのGPSアンテナa、a’を介しGPS電波Aが入力されるGPS受信機等を有するGPS装置3a(図4参照)が搭載されている。また、固定局2に設けられた無線通信用のアンテナbから発せられる無線通信Bを受けるアンテナb’を有し、GPS衛星1からの位置情報等を基にRTK測位しながら走行する。芝刈機3に2つのGPSアンテナa、a’を設け、それぞれからGPS電波Aを受けるようにしたのは芝刈機3の方向角がわかるようにしたためである。ここで方向角とは、一般に座標平面上の縦軸(真北)を基準とし、そこからある直線まで右回りに測った角のことである。そして、GPSアンテナa、a’を設けることによって、上記方向角の定義の座標平面上において、方向角は、GPSアンテナa、a’がなす線分と座標上の真北とのなす角度により求められる。
【0023】
GPS衛星1は、前述のように周波数の異なるL1波、L2波を発信しており、L1波、L2波を同時に受信するものを2周波方式、L1波のみを受信するものを1周波方式というが、本発明のGPS装置では、GPS受信機価格が安価である1周波方式を採用している。
【0024】
芝刈機3は、走行用の駆動エンジンまた電動モータの如き駆動手段、走行用のタイヤ、芝刈り用の刈刃、集草バケット等が設けられ、かつ上述のように、GPS衛星1からのGPS電波Aと、固定局2からの電波を受け、自動運転する電波航法装置、すなわちGPS装置3aを備えているほか、自律走行に必要なセンサ装置3Bを備え自立走行用型となっており、また、マニュアル運転もできるよう、座席、ハンドル等の操作手段を備えている。
【0025】
5は所定の場所に設けられ、第1、第2のポイント1、2が設けられた目標板で、移動局である芝刈機3の初期位置測定用のマーク板として機能する。この目標板5は適宜の場所にそれぞれ設けられている。芝刈機3の前部3a’には、図2に示すように、目標板5を撮像する2眼カメラ6が設けられている。
【0026】
2眼カメラ6は、一般的にステレオカメラとも称され、2つのカメラC1、C2で被写体(目標板5、第1のポイント1、第2のポイント2)を撮像する。このステレオカメラは、一般に、画像による3次元計測技術として、2台のカメラC1、C2で対象物を異なる位置から撮像した一対の画像の相関を求め、同一物に対する視差からステレオカメラの取付位置や焦点距離等のカメラパラメータを用いて三角測量により距離を求める場合に使用される。
【0027】
本発明では、ステレオカメラである2眼カメラ6より、予めGPS位置座標がわかっている目標板5の第1、第2のポイント1、2を撮像し、2眼カメラ6の三次元位置からGPS座標系に変換するようにしている。
【0028】
また、芝刈機3には、タッチパネル式の表示・操作部3Aが搭載されている。
【0029】
目標板5は横長矩形をなし、第1、第2のポイント1、2はほぼ円形となっている。第1、第2のポイント1、2は好ましくは赤色系、その周囲の背景は黒色系となっている。
【0030】
第1、第2のポイント1、2を赤色とすると、ゴルフコース内で最も多い色はグリーン(芝)の「緑」であり、「緑」に対する補色は「赤」のため、明確に撮像して画像を取り込むことができるためである。なお、補色とは、色相環で正反対に位置する色のことである。また、背景を「黒」とすると、太陽光による反射が少なく、好ましい。さらに、第1、第2のポイント1、2を円形としたのは、各ポイント1、2の中心位置の計算が他の形状に比べ容易なためである。なお、目標板5の形状、背景およびポイントの色は黒、赤に限定されるものではない。
【0031】
この発明は、RTK測位が中断した場合、芝刈機3を目標板5まで移動させ、2眼カメラ6でGPS位置座標が既知の目標板5を撮像し、その画像を解析して処理することにより、芝刈機搭載のGPS装置3aを初期化することに特徴を有している。
【0032】
また、RTK測位中のGPS装置塔載の芝刈機3を、新たに目標板5を設置した場合にそのGPS位置座標を求めることに使用することについても特徴を有している。
【0033】
図4は、固定局2の構成、移動局としての芝刈機3の構成をブロックで示す。
【0034】
固定局2はゴルフ場の適宜の場所に設けられ、GPSアンテナaを介しGPS電波Aを受けるGPS装置2aと、このGPS装置2aからのデータを芝刈機3側に送信する第1の通信装置2bを備えている。
【0035】
芝刈機3には、第1、第2のGPSアンテナa、a’を介し受信したGPS電波Aを受けるGPS装置3aが搭載され、このGPS装置3aからの出力信号は芝刈機3に設けられた制御装置3bに送出される。この制御装置3bには、第1の通信装置2bからの無線通信Bを通信アンテナb’を介し受信する第2の通信装置3cからの出力信号も送出される。また、2眼カメラ6の第1、第2のカメラC1、C2によって目標板5の第1、第2のポイント1、2を撮像したGPS位置情報も入力される。
【0036】
目標板5の第1、第2のポイント1、2の中心の位置座標は予め計測され既知となっている。また、2眼カメラ6からの第1、第2のGPSアンテナa、a’までの距離も既知となっており、制御装置3bに入力されている。
【0037】
制御装置3bには、GPS装置3a、2眼カメラ6からの位置情報、通信装置3cからのデータ等も入力され、サイクルスリップが生じた場合、2眼カメラ6からの画像を解析し演算処理し、RTK測位を行う。また、制御装置3bには表示・操作装置3A、センサ装置3Bからの出力信号も入力される。
【0038】
RTK測位とは、干渉測位の一つで移動局(芝刈機3)の他、固定局2を設ける。干渉測位では搬送波波長の整数値バイアスを決定する必要があるが、RTK方式では観測開始時に初期化を行い、以降は芝刈機3側に搭載しているGPS装置3aと固定局2側の第1のGPS装置2a間での無線通信Bを介し観測データの交信を行い、芝刈機3側に搭載した制御装置3bにおいて、GPS装置3aとGPS装置2aからのデータとともに所定の演算を行い、芝刈機3の走行に必要な位置を実時間で算出する。
【0039】
図5は制御装置3bとセンサ装置3Bの構成を示す。
【0040】
制御装置3bは、2眼カメラ6で取り込まれた画像を解析する画像解析部(図示せず)、その後段に設けられた演算部3d、センサインターフェース3e、駆動系インタフェース3f等を備え、これらはバス3gによって接続され、必要な各種データが送受される。なお、制御装置3bの演算部3dには、予め計測された目標板5の第1、第2のポイント1、2のGPS位置座標や2眼カメラ6とGPSアンテナa、a’間の距離が入力され、格納されている。
【0041】
そして、制御装置3bには、表示・操作装置3A、GPS装置3a、通信装置3c、2眼カメラ6からの出力信号も入力される。
【0042】
センサインターフェース3eには、センサ装置3Bを構成する地形の傾斜を検知する2軸傾斜センサ10、障害物の有無を検知する障害物センサ11、芝刈機左右の前輪の回転数を検出するロータリーエンコーダ12等の出力が入力され、処理される。
【0043】
そして、駆動系インターフェース3fからの制御信号によってステアリング、スロットル、刈刃等の制御が行われる。
【0044】
ゴルフ場の芝刈りにあたっては、タッチパネル式の表示・操作装置3Aの表示部には、ゴルフ場の芝刈りルートの図が示されており、予め作成されたデジタルマップ上の芝刈り経路をオペレーターが入力する。一般的にデジタルマップとは、情報がデジタル化された電子地図のことで、編集・加工が容易で、ネットワークなどを介して情報の共有が可能など多くの特徴を持つ。本芝刈機に関しては、領域内(フェアウエイ)境界のGPS位置座標、領域内(フェアウエイ)の障害物のGPS位置座標、領域内の芝刈り方向パターンを有している。デジタルマップのデータは制御装置3b内に格納されている。また、演算部3dのCPUボードには予め自律走行用の所定のプログラムが組み込まれ、芝刈機3は、入力された経路にしたがってGPS装置3a、センサ装置3B等の情報をもとに自己位置を測位しながら無人運転による自動走行し、芝刈り作業を行う。
【0045】
図6は、目標板5のGPS位置座標の特定ないし芝刈機3の芝刈り作業のフローチャートを示す。まずステップS1に示すように、目標板5のGPS位置座標を特定する。この特定にあたっては、別のGPS装置と固定局とを使用し、RTK測位によって目標板5のGPS位置座標を知ることができ特定することができ、それを制御装置3bに予め入力する。
【0046】
ステップS2の稼動開始にあたり、芝刈機3を静止状態として2眼カメラ6を目標板5に向け、表示・操作装置3Aを介しオペレーターの操作により初期化の指示が与えられると、ステップS3に示すように、2眼カメラ6のカメラC1、C2により、目標板5およびGPS位置座標が既知の第1、第2のポイント1、2を撮像する。2眼カメラ6はその画像を取り込み、制御装置3bの画像解析部にデータを送出する。画像解析部でその画像を解析し、演算部3dにて演算処理が行われ、第1、第2のポイント1、2と2眼カメラ6との間の距離を算出する。2眼カメラ6からGPS装置3aのGPSアンテナa、a’の距離は予め既知で特定されているため、目標板5から2眼カメラ6までの距離の算出値に、2眼カメラ6からGPSアンテナa、a’までの距離を加算すれば、GPSアンテナa、a’のGPS位置座標が正確に算出でき、初期化作業を短時間で行うことができる。RTK測位中断において、目標板5と2眼カメラ6を用いてのRTK測位状態への復帰時間、すなわち再初期化に要する時間は、約26秒で完了した。
【0047】
図7はそのフローチャートを示す。初期化後、ステップS4に示すように、芝刈機3を稼動する。
【0048】
再び図6において、芝刈機3の走行中は、芝刈機3はGPS装置3aによる位置データと固定局2間での無線通信Bのデータにより自らの正確な位置検出を行いながら芝刈機3は走行し、芝刈り作業を行う。
【0049】
そして、ステップS5に示すように、芝刈機3はRTK測位しながら芝刈り作業を行い、測位が正常であれば芝刈機3は稼動し続ける。
【0050】
一方、何らかの理由でRTK測位が中断した場合、ステップS6に示すように、人力によって芝刈機3をGPS位置座標が既知である近くの目標板5まで移動させる。
【0051】
そして、ステップS3に示すように、芝刈機3に搭載した2眼カメラ6により目標板5の第1、第2のポイント1、2を撮像し、目標板5と2眼カメラ6との正確な位置関係を制御装置3bで演算し、求めた位置のデータを制御装置3bからGPS装置3aに送ることにより、従来のように数十分の静止測位を行うことなく短時間で初期化できRTK測位状態への復帰を行うことができる。
【0052】
次に、2眼カメラ6によって目標板5を撮像し、目標板5と2眼カメラ6との間の距離を計測する方法について説明する。
【0053】
図8において左側は、2眼カメラ6の左レンズC1で目標板5および第1のポイント1の中心01を見た場合の映像、右側は右レンズC2での目標板5および第1のポイント1の中心01を見た場合の映像を示す。
【0054】
図において、
α:第1、第2のカメラC1、C2の視野角(rad)
P:カメラ画像の水平方向Pixel数
PLa:左カメラC1の画像の左端から対象の第1のポイント1の中心01までのPixel数
PRa:右カメラC2の画像の左端から対象の第1のポイント1の中心01までのPixel数
である。
【0055】
図9において左側は2眼カメラ6の左レンズC1で目標板5および第2のポイント2等を見た場合の映像、右側は右レンズC2で目標板5および第2のポイント2等を見た場合の映像を示す。
【0056】
図において、
α:カメラC1、C2の視野角(rad)
P:カメラ画像の水平方向Pixel数
PLb:左カメラC1の画像の左端から対象の第2のポイント2の中心02までのPixel数
PRb:右カメラC2の画像の左端から対象の第2のポイント2の中心02までのPixel数
である。
ここで、PIXELとは、画像を構成する色情報を持った最小単位、つまり画素のことである。また、カラー画素において一つのピクセルは、光の三原色(青・赤・緑)の輝度を持っている。ピクセルは大きさの単位ではないため、表示する媒体により大きさが異なる。本芝刈機に関しては、2眼カメラのPIXELの数、大きさは既知であるため、PIXEL数=距離(長さ)として扱うことが可能となる。
【0057】
図8、図9において、θ1、θ2、ψ1、ψ2の角度は、2眼カメラ6からの撮像より求められる。また、2眼カメラ6の撮像の左端から対象の中心01までの距離は、制御装置3b内に格納された画像認識プログラムによって二値化(白黒化)された撮像から二つの円を認識させ、その円の中心(第1、第2のポイント1、2の中心01、02)を求めることにより得ることができる。なお、画像認識プログラムとは、一般に、入力⇒補正⇒特徴抽出⇒識別⇒認識⇒出力のように幾つかの要素技術の集まりで定義される。まず、実写情景、写真等などから入力系を通して画像信号が得られ、コンピュータで画像処理が可能なように、デジタル化される。次に、歪みやノイズを除き、拡大、縮小、回転など補正処理を施した後、特徴抽出を行って、特徴パラメータあるいは特徴ベクトルを求める。こうして得られた特徴量の中から標準パターンに合致した特徴量、あるいは近い特徴量を識別によって決定、出力している。
【0058】
図10は2眼カメラ6を使って目標板5を撮像した状態の説明図を示し、第1のカメラC1(座標XL、YL)、第2のカメラC2(座標XR、YR)で目標板5の第1のポイント1の中心01(座標Xp1、Yp1)、第2のポイント2の中心02(座標Xp2、Yp2)を撮像する。
【0059】
図11は2眼カメラ6を使って正弦定理によって距離の計測を行なう説明図である。θ1、θ2、ψ1、ψ2の角度は2眼カメラ6の撮像より求められる。dは第1、第2のカメラC1、C2間の距離、L1は図示の状態において、左側のカメラC1から第1のポイント1の中心01までの距離、R1は右側のカメラC2から第1のポイント1の中心01までの距離である。また、L2は右側のカメラC2から第2のポイント2の中心02までの距離、R2は右側のカメラC2から第2のポイント2の中心02までの距離である。
【0060】
この図11の状態が制御装置3bの画像解析部で解析される。
【0061】
各距離L1、R1、L2、R2等は次のようにして求めることができる。
【0062】
正弦定理より、
R1/sinθ1=L1/sinψ1=d/sin(π−(θ1+ψ1))
d/sin(π−(θ1+ψ1)=d/sin(θ1+ψ1)より
R1/sinθ1=d/sin(θ1+ψ1)
L1/sinψ1=d/sin(θ1+ψ1)
R1=dsinθ1/sin(θ1+ψ1)
L1=dsinψ1/sin(θ1+ψ1)
【0063】
同様にして、
R2=dsinθ2/sin(θ2+ψ2)
L2=dsinψ2/sin(θ2+ψ2)
【0064】
左カメラC1の座標を(XL、YL)とすると、
第1のポイント1の中心01からの距離がL1、第2のポイント2の中心02からの距離がL2なので、(XL、YL)は次の式を満たす。
(XL−Xp1)2+(YL−Yp1)2=L12
(XL−Xp2)2+(YL−Yp2)2=L22
【0065】
同様にして、右カメラC2の座標(XR、YR)は次の式を満たす。
(XR−Xp1)2+(YR−Yp1)2=R12
(XR−Xp2)2+(YR−Yp2)2=R22
制御装置3bの演算部3dでの演算処理によって(XL、YL)(XR、YR)が確定することにより、2眼カメラ6の現在のGPS位置座標と方向が決まり、RTK測位を復帰、つまり芝刈機3の測位を行うことができる。
【0066】
なお、芝刈機搭載のGPS装置3aの初期化のために使用する目標板5は作業領域に複数個所設ける必要がある。本発明において、別の場所に、新たに目標板5を設置し、そのGPS位置座標の特定にあたり、静止測位によってGPS測位状態とした、GPS装置3a搭載の芝刈機3の2眼カメラ6によって目標板5を撮像すれば、RTK測位により芝刈機3の位置は正確にわかっているため、目標板5の位置を算出してGPS位置座標を特定することができ、芝刈機3をこのように使うこともできる。なお、新たな目標板5のGPS位置座標は、芝刈機3の制御装置3bの演算部3dに入力される。
【0067】
なお、上記実施例では移動局を芝刈機とした場合について説明したが、例えば農業機械などのようなその他の移動体にも適用し得る。
【図面の簡単な説明】
【0068】
【図1】本発明に係るGPS芝刈りシステムの概念の説明図を示す。
【図2】本発明で用いられる芝刈機前部の部分斜視図を示す。
【図3】本発明で用いられる目標板と2眼カメラとの関係を示す。
【図4】本発明で用いられる芝刈機固定局等の各構成をブロックで示した説明図である。
【図5】本発明の制御装置とセンサ装置の構成のブロック図を示す。
【図6】本発明の動作をフローチャートで示す説明図である。
【図7】本発明において、2眼カメラで取り込んだ目標板の撮像から初期化を行うフローチャートを示す。
【図8】本発明において、2眼カメラで目標板を撮像した場合の左右のレンズの映像を示す。
【図9】同じく本発明において、2眼カメラで目標板を撮像した場合の左右のレンズの映像を示す。
【図10】本発明で用いられる芝刈機の2眼カメラで目標板を撮像して目標板と2眼カメラとの距離を測定する状態の説明図を示す。
【図11】同じく本発明において、芝刈機の2眼カメラで目標板を撮像して目標板と2眼カメラとの距離を測定する説明図を示す。
【図12】1周波型のGPS装置でRTK測位を行うフローチャートを示す。
【符号の説明】
【0069】
1 GPS衛星
2 固定局
2a GPS装置
2b 第1の通信装置
3 芝刈機
3a GPS装置
3a’ 芝刈機前部
3b 制御装置
3c 第2の通信装置
3d 演算部
3e センサインターフェース
4 ゴルフ場
5 目標板
6 2眼カメラ
10 2軸傾斜センサ
11 障害物センサ
C1 第1のカメラ
C2 第2のカメラ
a,a’ GPSアンテナ
b,b’ 通信用アンテナ
【特許請求の範囲】
【請求項1】
1周波型のGPS装置を搭載し、静止測位後、RTK測位をしながら電波航法にて走行する芝刈機において、
前記芝刈機には、予めGPS位置座標が特定された目標板を撮像し、その画像を取り込み目標との距離を計測するための2眼カメラが搭載され、
前記RTK測位が中断した場合、前記2眼カメラにより前記目標板を撮像し、その画像を取り込み芝刈機に設けられた制御装置の画像解析部で解析し、かつ演算部で演算処理して前記目標板から前記芝刈機搭載のGPS装置までの距離を計測し、GPS装置の初期化を行うことを特徴とする芝刈機の測位方法。
【請求項2】
請求項1記載の芝刈機の測位方法において、
前記目標板は黒色系をなし、かつ目標板には予め位置座標が特定された赤色系の第1、第2のポイントが設けられたことを特徴とする芝刈機の測位方法。
【請求項3】
GPS装置および目標板を撮像し、その画像を取り込み目標板との間の距離を計測するための2眼カメラが搭載され、RTK測位にある芝刈機により新たに別途設けた目標板を撮像してその画像を取り込み、画像を解析して演算処理し、前記目標板のGPS位置座標を特定することを特徴とする目標板の測位方法。
【請求項1】
1周波型のGPS装置を搭載し、静止測位後、RTK測位をしながら電波航法にて走行する芝刈機において、
前記芝刈機には、予めGPS位置座標が特定された目標板を撮像し、その画像を取り込み目標との距離を計測するための2眼カメラが搭載され、
前記RTK測位が中断した場合、前記2眼カメラにより前記目標板を撮像し、その画像を取り込み芝刈機に設けられた制御装置の画像解析部で解析し、かつ演算部で演算処理して前記目標板から前記芝刈機搭載のGPS装置までの距離を計測し、GPS装置の初期化を行うことを特徴とする芝刈機の測位方法。
【請求項2】
請求項1記載の芝刈機の測位方法において、
前記目標板は黒色系をなし、かつ目標板には予め位置座標が特定された赤色系の第1、第2のポイントが設けられたことを特徴とする芝刈機の測位方法。
【請求項3】
GPS装置および目標板を撮像し、その画像を取り込み目標板との間の距離を計測するための2眼カメラが搭載され、RTK測位にある芝刈機により新たに別途設けた目標板を撮像してその画像を取り込み、画像を解析して演算処理し、前記目標板のGPS位置座標を特定することを特徴とする目標板の測位方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2010−25872(P2010−25872A)
【公開日】平成22年2月4日(2010.2.4)
【国際特許分類】
【出願番号】特願2008−190399(P2008−190399)
【出願日】平成20年7月24日(2008.7.24)
【出願人】(596047171)コスモ・イーシー株式会社 (12)
【Fターム(参考)】
【公開日】平成22年2月4日(2010.2.4)
【国際特許分類】
【出願日】平成20年7月24日(2008.7.24)
【出願人】(596047171)コスモ・イーシー株式会社 (12)
【Fターム(参考)】
[ Back to top ]