
苗移植機
【課題】狭い領域での苗の植え付けなどの農作業を的確に行える苗移植機を提供すること。
【解決手段】電動モータ駆動式の前後輪3,4を支持する走行車体1の上方に苗供給装置16を配置し、車体1の下方に苗植付装置7を配置し、車体1を貫通して苗供給装置16と苗植付装置7をほぼ水平方向に回動自在に連結するピン12と該ピン12を回転自在に支持するバブ6を備えている苗移植機であり、狭い間隔で多量の苗を植えるネギなどの苗移植機として使用できる。
【解決手段】電動モータ駆動式の前後輪3,4を支持する走行車体1の上方に苗供給装置16を配置し、車体1の下方に苗植付装置7を配置し、車体1を貫通して苗供給装置16と苗植付装置7をほぼ水平方向に回動自在に連結するピン12と該ピン12を回転自在に支持するバブ6を備えている苗移植機であり、狭い間隔で多量の苗を植えるネギなどの苗移植機として使用できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、苗供給装置と苗植付装置を走行車体に対して回動自在に取り付けた苗移植機に関する。
【背景技術】
【0002】
苗移植機は、その苗供給作業や走行操作のために作業者が常時、移植機を操作する必要がある。その苗移植作業は多量の苗を植えるために長時間を要し、退屈な作業である。また同時に寒い季節に苗の植え付けを行うことが多いので厳しい作業でもある。
そのため、GPSを使用して無人で苗の移植を行うことができる無人移植機が提案されている。
【特許文献1】特開平9−91039号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上記特許文献1記載の発明によれば、GPSとGPS基準局と苗移植機との間での通信により苗移植機の位置を求めて、一つの農作業行程から次の農作業行程への移動を的確に行うことができる。
しかし、上記特許文献1記載の構成では、狭い領域での苗の植え付けなどの農作業を的確に行える構成になっていない。
【0004】
本発明の課題は、狭い領域での苗の植え付けなどの農作業を的確に行える苗移植機を提供することである。
【課題を解決するための手段】
【0005】
本発明の上記課題は以下の構成を採用することにより達成される。
請求項1記載の発明は、電動モータ駆動式の車輪(3,4)と、該車輪(3,4)を支持する走行車体(1)と、該走行車体(1)の上方に配置した苗供給装置(16)と、走行車体(1)の下方に配置した苗植付装置(7)と、該走行車体(1)を貫通して苗供給装置(16)と苗植付装置(7)をほぼ水平方向に回動自在に連結する回動軸部(6,12)とを備えた苗移植機である。
【発明の効果】
【0006】
請求項1記載の発明によれば、本苗移植機は、苗植付装置7及び苗供給装置16を走行車輪3,4を支持する走行車体1に対して回動軸部6,12を中心にして向きを180度変更することができるので、狭い圃場でも苗の植え付けを容易に行うことができる。また、圃場の畦際で苗植付装置7及び苗供給装置16の向きを180度変更することで圃場内での往復植付作業ができ、圃場の畦際での走行車体1の旋回が不要となる。
【発明を実施するための最良の形態】
【0007】
以下、本発明の実施の形態の一例を説明する。
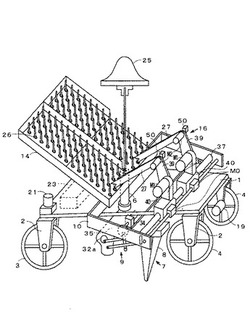
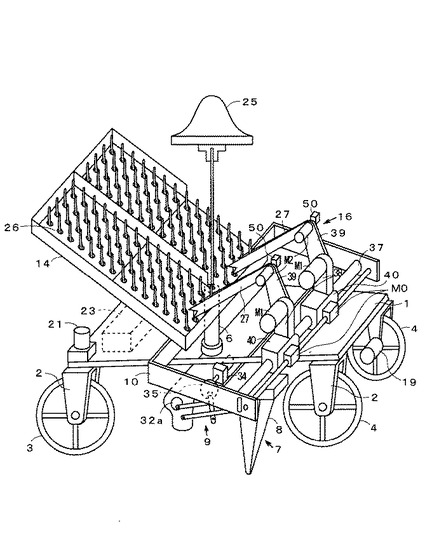
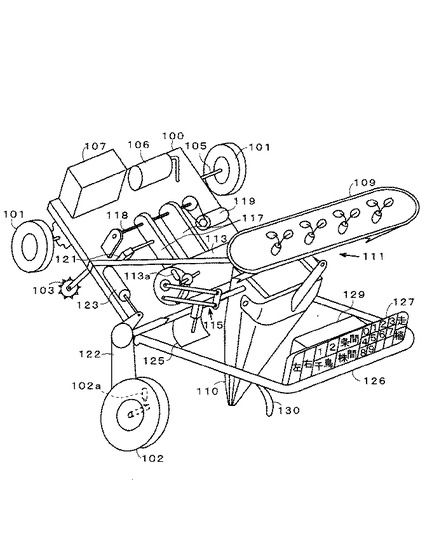
図1は本実施形態の走行車体1の苗移植機の斜視図を示し、図2にその苗供給装置16と苗植付装置7の概略斜視図を示す。
【0008】
本実施例の走行車体1の苗移植機はGPSにより、その地上での位置を検出しながら、適切な位置に移動した上で苗の植え付けが可能な無人苗移植機であり、走行車体1の支持される苗植付装置7と該苗植付装置7に苗を供給する苗供給装置16を備えている。
【0009】
苗移植機は平床状の走行車体1と該走行車体1の4隅にキャスタ2を介して取り付けた一対の前輪3,3と一対の後輪4,4を有し、走行車体1の中央部の下方には走行車体1を貫通して走行車体1に固着した支持部材(ハブ)6に設けられた苗植付装置7のホッパ8とホッパ駆動機構9とを備え、走行車体1の後半部の上方には平面視「コ」字状部材からなる苗供給装置支持フレーム10が取り付けられている。なお、一対の前輪3,3と一対の後輪4,4は走行車体1に対して回動自在に取り付けられているので前後輪3,4の向きを調整することで走行車体1は方向転換できる。
【0010】
また、植付装置支持ケース30の中央部に固着して立設したピン12をハブ6の中央孔に遊嵌状に挿入しておき、該ケース30とピン12とハブ6を車体1の裏面側から車体1の中央部に設けた開口部に挿入して、ハブ6を走行車体に溶接接続する。
【0011】
走行車体1の上側から突出するピン12にはギヤ28を固着し、さらにギア28の上部のピン12は苗供給装置支持フレーム10と一体のハブ支持プレート24に固定する。
【0012】
従ってピン12と一体の苗供給装置支持フレーム10と植付装置支持ケース30が走行車体1に対して回動自在に一体回転する。
【0013】
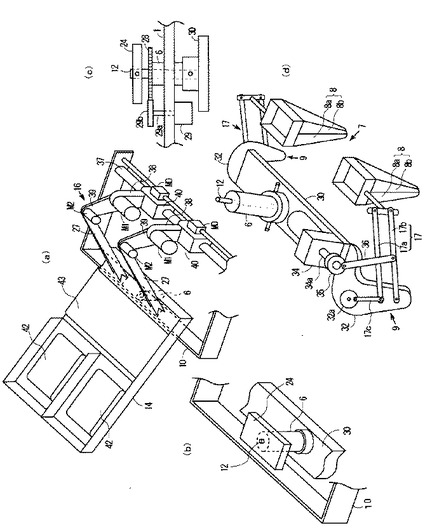
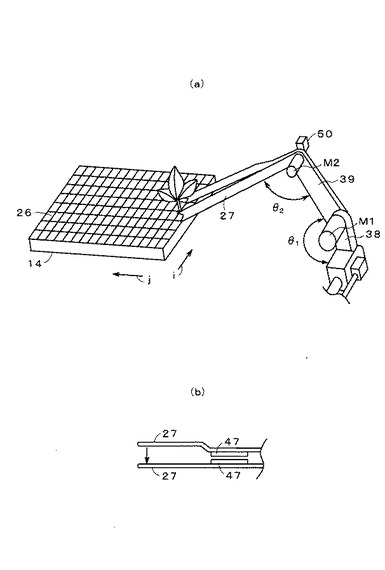
図2(a)は多数のポット26aを備えたトレイ26(図1参照)を載置するトレイケース14と該トレイケース14中の1/4の大きさの各トレイ26内のポット26aから苗をピックアップする一対の苗挟持アーム27とその駆動部と苗挟持アーム27とその駆動部を支持する苗供給装置16の斜視図であり、また、図2(b)は苗供給装置16のハブ支持プレート24を取り付けた苗供給装置支持フレーム10の一部の斜視図、図2(c)は走行車体1を中心として、その上下に走行車体1を貫通した位置に配置されるハブ6及びそれに関連する部材の一部を示す側面図、図2(d)は走行車体1より下方に配置される苗植付ホッパ8を含む苗植付装置7の斜視図である。
【0014】
図2(c)に示すように走行車体1の下面には旋回モータ29を配置し、旋回モータ29の回転軸29aに設けたギヤ29bを走行車体1を貫通してピン12と一体回転するギヤ28と噛合させている。
【0015】
また、植付装置支持ケース30の両端部には、一対の苗植付ホッパ8のリンク部材17に一端を回動自在に支持するリンク支持ケース32が一体的に接続している。
【0016】
従って、走行車体1の下面に取り付けられた旋回モータ29を駆動させると、ピン12を中心にピン12と一体の苗供給装置支持フレーム10と植付装置支持ケース30が走行車体1に対して回動自在に一体回転し、苗供給装置支持フレーム10に取り付けられた苗供給装置16と植付装置支持ケース30に取り付けられた苗供給装置16と苗植付装置7は、走行車体1に対して一体的に180度回転させることができる。
【0017】
また、植付装置支持ケース30上には植付モータ34が配置されていて、該植付モータ34の回転軸34aに固定した偏心リング35と該リング35に回動自在に連結したリンクアーム36が上下動用リンク部材17の内の下リンク部材17bにリンクしているので、植付モータ34を駆動させるとホッパ8は上下動できる。
【0018】
なお、一対の上下動用リンク部材17の内の上リンク部材17aのリンク支持ケース32側の端部には該リンク支持ケース32に設けた回動自在の円板32aの側面に一端を回動自在にリンク部材17cを接続している。該リンク部材17cの他端は上下動用リンク部材17の内の上リンク部材17aの端部と連結しており、これらの連結した円板32aとリンク部材17a,17cの組み合わせにより苗植付ホッパ8が前後姿勢を変えながら上下に移動するため、側面視ループ状の植付作動軌跡を描くことができる。
【0019】
また、図2(d)の上側(機体前進方向に向いて右側)のリンク支持ケース32に取り付けられたリンク部材17はモータ34の回転で駆動する円板32aからの動力が左側のホッパ駆動機構9から右側のホッパ駆動機構9へモータ34の駆動力を伝達する図示しない伝動軸により伝達され、両側のホッパ8,8が同時に上下動する。
【0020】
また詳細な説明は省略するが、ホッパ8の上下動用リンク部材17が下動すると、前後方向に二つの部材8a,8bが閉じた状態のホッパ8が圃場面に挿入され、その後ホッパ8の二つの部材8a,8bの下端部が前後に開放することで、予めホッパ8内に挿入されている苗が圃場に供給される構成である。
【0021】
さらに、一以上の適宜の車輪(図1では後輪4)には走行モータ19を取り付けているので、苗移植機は圃場内を走行できる。さらに、走行車体1の上面の前側の一対のコーナ部には車輪旋回モータ21を配置しているので360度に亘り旋回可能なキャスタ2を適宜に旋回させることで前輪3の向きを変えて前進時に旋回ができる。
【0022】
苗供給装置支持フレーム10に両端を支持されたレール37に設けた一対の支柱38の頂部にそれぞれ中間リンク39を回動自在に設け、各中間リンク39の先端部に一対の苗挟持アーム27,27を回動自在に連結している。鉛直方向を向いた各支柱38は苗供給装置支持フレーム10に両端を支持されたレール37に摺動自在に設けられた各基台40上にそれぞれ固定されており、一対の基台40は各基台40に取り付けられた各リニアモータM0でレール37上を左右方向に摺動可能になっている。
【0023】
また、各支柱38の頂部には第1モータM1がそれぞれ設けられ、該第1モータM1で中間リンク39が支柱38の頂部を中心として上下方向に回動可能であり、また各中間リンク39の先端部には第2モータM2がそれぞれ設けられ、各第2モータM2で一対の苗挟持アーム27,27が中間リンク39の先端部を中心として上下方向に回動可能である。
【0024】
また、トレイ26はトレイケース14内に配置される。トレイケース14は図1に示すように挟持アーム27が個々の苗を挟持しやすいように挟持アーム27に向かって傾斜状に苗が配置されるように走行車体1に対して傾斜させて苗供給装置支持フレーム10に固定支持されている。
【0025】
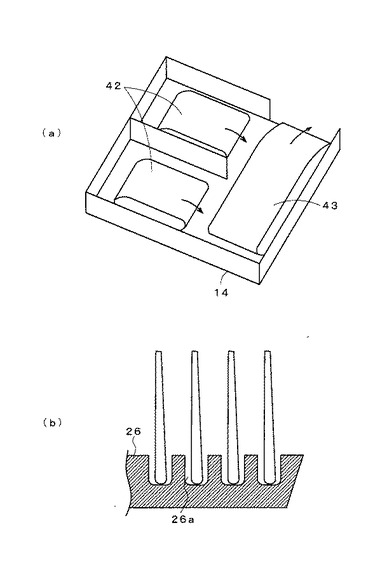
トレイケース14は図3(a)の斜視図に示すように並列配置された一対のトレイ縦送りベルト42,42と該一対の縦送りベルト42,42で矢印方向に搬送されてきたトレイ26を横送りするための横送りベルト43とからなる。横送りベルト43を挟持アーム27に近い方に配置することで、縦送りベルト42の部分に供給した新たなトレイ26が各縦送りベルト42から横送りベルト43に向けて順次トレイ26を移動させ、当該トレイ26中の全ての苗が挟持アーム27により取り出されると、横送りベルト43が作動してトレイケース14から当該トレイ26を排出する。
【0026】
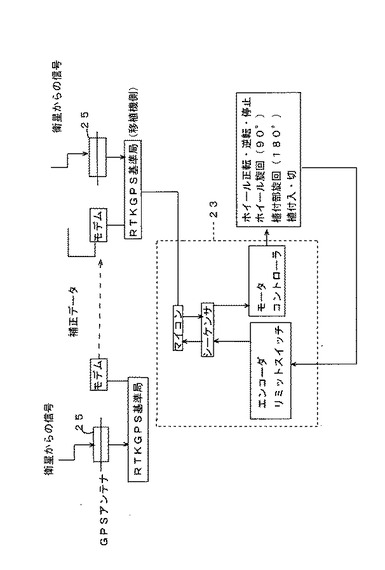
また、車輪旋回モータ21の近傍の走行車体1の上面又は下面には本苗移植機の走行と苗の供給・植付制御のためのコントローラ23(図5参照)を配置している。さらに走行車体1を貫通して設けられたピン12の上端部にはGPSとの送受信用のアンテナ25が取り付けられている。前記コントローラ23により走行制御ではGPSからの受信に基づいて苗移植機を操縦できる。
【0027】
すなわち、図5に示すように通信衛星(GPS)からの信号を苗移植機に設置されているGPSアンテナ25で受信し、GPS基準局のモデムと各苗移植機に内蔵されているモデムを介して基準位置との相違から補正される補正データに基づき各苗移植機に内蔵されているGPS移動局に送信し、そのデータと前記コントローラ23内に記録された圃場地図とから苗移植機の走行径路を決定し、車輪旋回モータ21と走行モータ19を駆動制御して目的の位置に移動した上で、走行車体1上のトレイ26からネギなどの苗を掴んでホッパ8に供給し、移植することができる。
【0028】
ネギのように狭い間隔で多量の苗を植える場合には、苗移植機での苗供給や走行操作のために作業者が苗移植機に付きっきりでいるのは退屈な作業であると同時に寒い季節の作業であるため、ネギの植え付けが好まれない。また、走行車体1といっても走行径路を決めるために前もって車輪3又は4で溝作りのため1度走行しており、苗植付時と合わせると2度同じ所を走行することになり作業効率が良くない。
【0029】
そこで上記のようにGPSを利用する精密な走行制御で、苗移植機を無人走行させても苗供給や走行操作が可能になる。但しトレイ26中のポット26aへの苗補給は作業者が行う必要がある。また本実施例の苗移植機では圃場の地図を内蔵しているので走行のための溝作り走行は不要となり、同一箇所の二度走行を行うことはない。
【0030】
本実施例の苗移植機は圃場端で走行部が横移動できる構成を有するが、このためには苗植付部を180°旋回する必要がある。その理由は、一つの植付行程が終了して次行程で苗を植え付けるためには苗移植機の進行方向を180度変える必要があるためである。従来の苗移植機では、走行車体から苗供給装置と植付装置を支持する支持フレームごと180度回動させようとすると、走行車体と苗供給装置と植付装置を支持する支持フレームとが干渉する配置関係にあった。
【0031】
しかし、本実施例の苗移植機は、図2に示すように、走行車体1のほぼ中央に固定されたピン12が走行車体1の上側のトレイケース14を含む苗供給装置16と走行車体1の下側の苗植付装置7を連結しているため、苗供給装置16と苗植付装置7が走行車体1に干渉することなく一体的に同期してピン16を中心に180°旋回可能となる。
【0032】
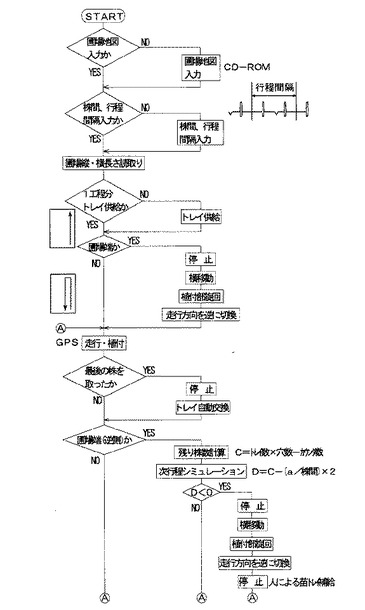
図6には、本実施例の苗移植機の自動制御動作を示すフローチャートである。
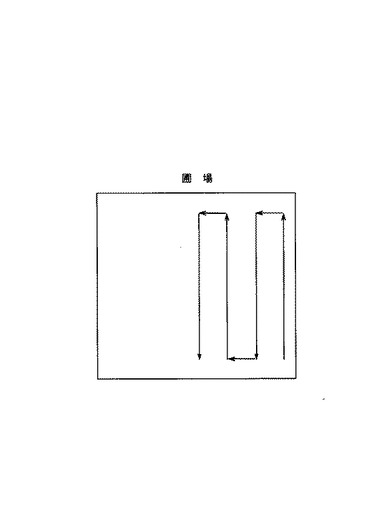
作業を行う圃場の地図をCD−ROMで入力した後、予定の株間、行程間隔を予め入力し、また長方形の圃場であれば、圃場全体の縦横の長さを地図データ又は機体の走行距離の検出などにより読み取り、例えば、圃場の一端から他端までの移植機の直進走行の1行程分のトレイ26がトレイケース14内にあることを確認すると圃場端に苗移植機がいるかどうかをチェックし、もし圃場端にいれば、移動を停止して前輪3を90度回転させて移植機を横移動させて隣の次行程位置に移る。次いで、走行してきた方向と反対方向に走行させるために、苗の植付装置7を旋回させ、同時に走行方向を今までの走行方向より180度逆方向に切り換える。圃場内での苗移植機のこれらの一連の動きを図7に示す。
【0033】
次いで植え付け準備が整ったらGPSとの交信で圃場内での位置を確認しながら、苗移植機は一二条分の植付行程分の走行と苗の植付を行う。予定の一条分の植付行程での苗の植付作業を行う前に、トレイ26内の最後の株(苗)を挟持アーム27が取ったことが後述する図8のフローチャートのステップ(「J>N」?=yes)で分かると、走行を停止して空になったトレイ26を新規なトレイ26と自動交換する(図3(a)の構成で自動交換できる。)。
【0034】
また、苗移植機が一二条分の植付行程分の走行を終了して圃場の端部に達すると、トレイ26中の残りの株(苗)数を数式(1)で計算し、次の一二条分の植付行程分のシミュレーションをして数式(2)でDを計算する。
C=(トレイ数×穴数)−(カウンタ数) (1)
なお、カウンタ数とは植付株数である。
D=C−(行程距離/株間)×2 (2)
Dがゼロ未満になるとトレイ26内の株(苗)数が足りないので、苗移植機の走行を停止する。Dがゼロ以上であれば、前輪3を90度回転させて苗移植機を横移動させ、次いで苗の植付部を旋回させ、同時に走行方向を今までの走行方向より180度逆方向に切り換え、走行停止して人力でトレイに苗を補給する。
【0035】
図4(a)に示すように、トレイケース14内に矢印i,j方向にトレイ26が配置されている。図4(b)には一対の苗挟持アーム27,27の平面図を示す。一対の苗挟持アーム27,27の対向する面にそれぞれ電磁ソレノイド47,47を設け、電磁ソレノイド47,47に電流を流すことで一対の苗挟持アーム27,27の先端部で苗を挟持することができる。
【0036】
なお、図4(a)に示す例では一対の苗挟持アーム27,27の基部にカラーセンサ50を取り付けているので、トレイ26中の培土の土色に対して苗の緑色をセンサ50が検知すると一対の苗挟持アーム27,27が作動する構成である。
【0037】
図4に示す構成において、苗供給装置16の一対の苗挟持アーム27,27が左右に移動しながらトレイ26中の苗の基部を順次把持するが、このとき茎があるかないかをカラーセンサ50(図1参照)で検出し、なければ次の苗の茎を把持・引き抜いて苗植付装置7のホッパ8に装填する手順で苗を圃場に植え付けていく。
【0038】
カラーセンサ50でトレイ26中の苗の有無をチェックしながら苗を苗供給装置16から苗植付装置7へ移せるので、圃場への苗の植え付けをしない状態(欠株があるという)のまま、苗移植機を走行させるおそれがなくなる。
【0039】
このように、トレイ26中に苗のない部分があれば、その部分を取り出して植え付けても植付欠株となる。この圃場の欠株位置に補植することが不要であり(植えた後の補植不要)、また、トレイ26中に苗のない部分があれば、その部分に予め別の苗を補充して手直しする必要があるが、本構成では、その手直しが不要である
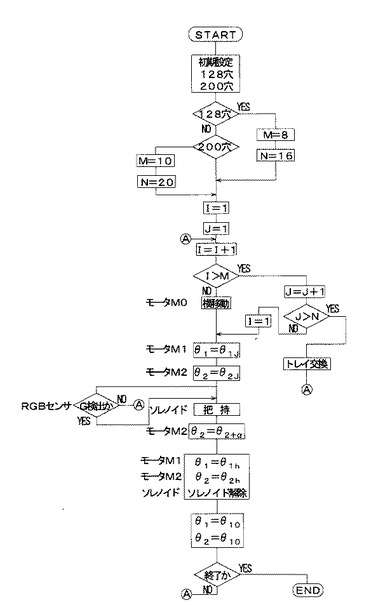
図4(a)に示す構成で、一対の苗挟持アーム27,27がトレイ26中の株(苗)を順次把持するための苗移植機の作動制御のフローチャートを図8に示す。
トレイ26は128穴と200穴を有する場合が多いので、本実施例では128穴と200穴を有するトレイ26が用意されている。
【0040】
128穴と200穴を有するトレイ26(図4(a)の(イ)矢印i方向に設けた穴(M=8個)と矢印j方向に設けた穴(N=16個)の合計128穴を有するトレイ26、又は(ロ)矢印i方向に設けた穴(M=10個)と矢印j方向に設けた穴(N=20個)の合計200穴を有するトレイ26)を用いて矢印i方向に設けた穴の株(苗)を把持し、モータM0が駆動して取り出す苗の左右位置と合う位置に苗挟持アーム27を移動させる。 次にモータM1を駆動させて株を把持する位置に中間リンク39を上下方向に角度θ1=θ1j回転させ、モータM2を上下方向に角度θ2=θ2j回転させて、その後、カラーセンサ50が株(苗)の緑を検出すると、苗挟持アーム27のソレノイド47を作動させて株(苗)を把持させる。
【0041】
次いで、モータM2を上下方向に角度θ2=θ2+α回転させて株(苗)をトレイ26から引き抜き、次いでモータM1を上下方向に角度θ1=θ1h回転させ、同時にモータM2を上下方向に角度θ2=θ2h回転させ、さらにソレノイド47を作動させて苗挟持アーム27,27で把持した株(苗)を苗植付装置7のホッパ8に放擲し、更にモータM2を上下方向に角度θ1=θ10回転させ、同時にモータM2を上下方向に角度θ2=θ10回転させて苗挟持アーム27を退避させる。
【0042】
また、矢印i方向に設けた穴の株(苗)を全てホッパ8に放擲し終えると(I>M)、矢印j方向の(j+1)列目に設けた穴の株(苗)を矢印i方向に順次把持する動作に移る。この様にして矢印j方向の各列目に設けた穴の株(苗)をすべてホッパに放擲し終えると(J>N)、トレイケース14内の空のトレイ26を新たなトレイ26に置き換える。
【0043】
図9には別の苗移植機の斜視図を示す。
走行車体100に一対ずつの前輪101と後輪102が支持され、前後輪101,102の間には走行車体100に支持された実走距離センサ103が配置され、また走行車体100上の前半部には一対の前輪101の駆動軸105を回転制御する走行モータ106とそのバッテリ107が載置され、さらに走行車体100上の後半部には苗トレイ109とホッパ110とホッパ110を上下駆動させる植付モータ113、該モータ113で駆動される左右一対の平行リンク115等を備えた苗植付装置111が設けられている。
【0044】
また苗植付装置111を構成する前記部材を一体的に横移動させる一対のアーム117と該アーム117を貫通するスクリュウねじ118とスクリュウねじ118を正転又は逆転させる横移動モータ119と前記一対のアーム117に取り付けたリニアポテンショメータ121及び後輪102のキャスタ(支持アーム)122を揺動させるスイングモータ123が配置されている。
【0045】
植付モータ113には該モータ113のn回転数センサ113aが取り付けられ、また後輪102には該後輪102のN回転数センサ102aが設けられ、さらに走行車体1の下方後端部には走行車体100の上下制御センサ125が設けられている。
【0046】
また走行車体100の後端部にはハンドル126と該ハンドル126に取り付けられたタッチパネル127とコントローラ129及びハンドル126に付属する後輪102のサイドクラッチレバー130が取り付けられている。
【0047】
ホッパ110に人力で投入された苗は苗植付装置111が下方に移動するのに伴って圃場に挿入されるホッパ110の先端部が開放して苗が圃場に植え付けられる。
【0048】
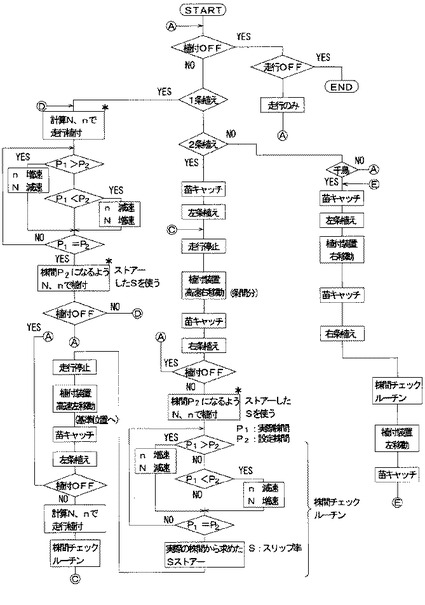
図10には図9に示す苗移植機の制御のフローチャートを示す。
さらに、植付モータ113のn回転数センサ113aと後輪102のN回転数センサ102aでそれぞれ計測される回転数を制御することで苗の植付株(苗)間が所定値になるように植付モータ113のn回転数と後輪102のN回転数を制御することができる。このステップを図10の*印で始まるステップに示す。
【0049】
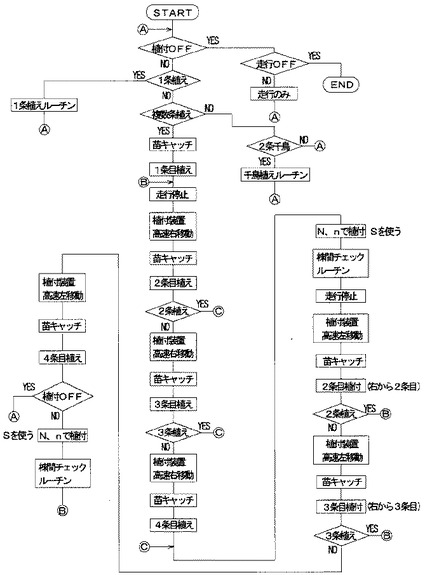
図10に示すようにホッパ110から苗を圃場に植え付けた後、所定量だけ前進しながら横移動モータ119が所定量正方向又は逆方向に回転すると左右のいずれかの方向に苗植付装置111を横移動させ、その後ホッパ110から苗を圃場に植え付けることで2条植付が可能となる。また苗を植え付けた後、前記所定量の前進距離の半分の距離を前進して、また前記所定量の半分の横移動をして苗を再び植え付けると千鳥植えができる。
【0050】
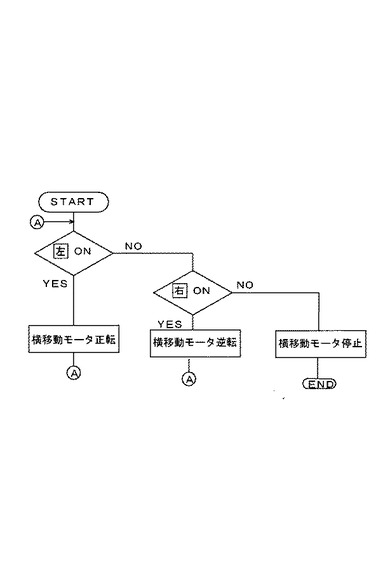
なお、植付装置111による苗植付位置の設定は、図12の横移動モータ119の制御のフローチャートに示すように、タッチパネル127の「左」又は「右」を押す操作により、植付装置111が走行車体100に対しての左右方向への横移動位置が設定できる。図11に示すように本苗移植機の横移動モータ119を用いて複数条植えを行う場合には左条の植付位置を設定できる。
【0051】
さらに、図12の本苗移植機の制御のフローチャートに示すように、横移動モータ119による苗植付装置111の左右方向への移動量により、3条植又は4条植えが可能になる。しかも本苗移植機は1台で、圃場の両端部までの往復移動による往復植えをしないで、圃場の一方への走行時の1条分の植付装置111を用いて1条植え、2条植え、3条植え、4条植えおよび千鳥植えができる利点がある。
【0052】
このように株間設定はタッチパネル127より入力で植付モータ113のn回転数と後輪102のN回転数を制御するだけで株間を調節でき、複雑なギヤチェンジ方式の機械は不要となる。
【0053】
また、本苗移植機は全ての駆動部が電動装置を用いて駆動するので排ガスが出ないため、育苗用ハウス内で使用できる。
【産業上の利用可能性】
【0054】
本発明はネギに限らず、各種作物の収穫を自動化できるので将来性の高い収穫ロボットとなる。
【図面の簡単な説明】
【0055】
【図1】本発明の一実施例の苗移植機の斜視図である。
【図2】図1の苗移植機の主要部の分解図である。
【図3】図1の苗移植機のトレーフレームの斜視図(図3(a))とトレイの縦断面図(図3(b))である。
【図4】図1の苗移植機のトレイケース内のトレイの配置を示す斜視図(図4(a))と一対の苗挟持フレームの平面図(図4(b))である。
【図5】図1の苗移植機のGPSとの送受信装置の構成を示す図である。
【図6】図1の苗移植機の作業手順を示すフローチャートである。
【図7】図1の苗移植機の圃場内での苗移植機の動きを示す図である。
【図8】図1の苗移植機の苗移植機のトレー内の苗を挟持フレームで取り出す作業手順を示すフローチャートである。
【図9】本発明の一実施例の苗移植機の斜視図である。
【図10】図9の苗移植機の作業手順を示すフローチャートである。
【図11】図9の苗移植機の作業手順を示すフローチャートである。
【図12】図9の苗移植機の作業手順を示すフローチャートである。
【符号の説明】
【0056】
1 走行車体 2 キャスタ
3 前輪 4 後輪
6 支持部材(ハブ) 7 苗植付装置
8(8a,8b) ホッパ 9 ホッパ駆動機構
10 苗供給装置支持フレーム 12 ピン
14 トレイケース 16 苗供給装置
17(17a,17b,17c) リンク部材
19 走行モータ 21 車輪旋回モータ
23 コントローラ 24 ハブ支持プレート
25 GPS(送受信用)アンテナ
26 トレイ 26a ポット
27 苗挟持アーム 28 ギヤ
29 旋回モータ 29a 回転軸
29b ギア 30 植付装置支持ケース
32 リンク支持ケース 34 植付モータ
34a 回転軸 35 偏心リング
36 リンクアーム 32a 円板
37 レール 38 支柱
39 中間リンク 40 基台
M0 リニアモータ M1 第1モータ
M2 第2モータ 42 縦送りベルト
43 横送りベルト 47 電磁ソレノイド
50 カラーセンサ 100 走行車体
101 前輪 102 後輪
102a N回転数センサ 103 実走距離センサ
105 駆動軸 106 走行モータ
107 バッテリ 109 苗トレイ
110 ホッパ 113 植付モータ
113a n回転数センサ 115 平行リンク
111 苗植付装置 117 アーム
118 スクリュウねじ 119 横移動モータ
121 リニアポテンショメータ 122 キャスタ(支持アーム)
123 スイングモータ 125 上下制御センサ
126 ハンドル 127 タッチパネル
129 コントローラ 130 サイドクラッチレバー
【技術分野】
【0001】
本発明は、苗供給装置と苗植付装置を走行車体に対して回動自在に取り付けた苗移植機に関する。
【背景技術】
【0002】
苗移植機は、その苗供給作業や走行操作のために作業者が常時、移植機を操作する必要がある。その苗移植作業は多量の苗を植えるために長時間を要し、退屈な作業である。また同時に寒い季節に苗の植え付けを行うことが多いので厳しい作業でもある。
そのため、GPSを使用して無人で苗の移植を行うことができる無人移植機が提案されている。
【特許文献1】特開平9−91039号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上記特許文献1記載の発明によれば、GPSとGPS基準局と苗移植機との間での通信により苗移植機の位置を求めて、一つの農作業行程から次の農作業行程への移動を的確に行うことができる。
しかし、上記特許文献1記載の構成では、狭い領域での苗の植え付けなどの農作業を的確に行える構成になっていない。
【0004】
本発明の課題は、狭い領域での苗の植え付けなどの農作業を的確に行える苗移植機を提供することである。
【課題を解決するための手段】
【0005】
本発明の上記課題は以下の構成を採用することにより達成される。
請求項1記載の発明は、電動モータ駆動式の車輪(3,4)と、該車輪(3,4)を支持する走行車体(1)と、該走行車体(1)の上方に配置した苗供給装置(16)と、走行車体(1)の下方に配置した苗植付装置(7)と、該走行車体(1)を貫通して苗供給装置(16)と苗植付装置(7)をほぼ水平方向に回動自在に連結する回動軸部(6,12)とを備えた苗移植機である。
【発明の効果】
【0006】
請求項1記載の発明によれば、本苗移植機は、苗植付装置7及び苗供給装置16を走行車輪3,4を支持する走行車体1に対して回動軸部6,12を中心にして向きを180度変更することができるので、狭い圃場でも苗の植え付けを容易に行うことができる。また、圃場の畦際で苗植付装置7及び苗供給装置16の向きを180度変更することで圃場内での往復植付作業ができ、圃場の畦際での走行車体1の旋回が不要となる。
【発明を実施するための最良の形態】
【0007】
以下、本発明の実施の形態の一例を説明する。
図1は本実施形態の走行車体1の苗移植機の斜視図を示し、図2にその苗供給装置16と苗植付装置7の概略斜視図を示す。
【0008】
本実施例の走行車体1の苗移植機はGPSにより、その地上での位置を検出しながら、適切な位置に移動した上で苗の植え付けが可能な無人苗移植機であり、走行車体1の支持される苗植付装置7と該苗植付装置7に苗を供給する苗供給装置16を備えている。
【0009】
苗移植機は平床状の走行車体1と該走行車体1の4隅にキャスタ2を介して取り付けた一対の前輪3,3と一対の後輪4,4を有し、走行車体1の中央部の下方には走行車体1を貫通して走行車体1に固着した支持部材(ハブ)6に設けられた苗植付装置7のホッパ8とホッパ駆動機構9とを備え、走行車体1の後半部の上方には平面視「コ」字状部材からなる苗供給装置支持フレーム10が取り付けられている。なお、一対の前輪3,3と一対の後輪4,4は走行車体1に対して回動自在に取り付けられているので前後輪3,4の向きを調整することで走行車体1は方向転換できる。
【0010】
また、植付装置支持ケース30の中央部に固着して立設したピン12をハブ6の中央孔に遊嵌状に挿入しておき、該ケース30とピン12とハブ6を車体1の裏面側から車体1の中央部に設けた開口部に挿入して、ハブ6を走行車体に溶接接続する。
【0011】
走行車体1の上側から突出するピン12にはギヤ28を固着し、さらにギア28の上部のピン12は苗供給装置支持フレーム10と一体のハブ支持プレート24に固定する。
【0012】
従ってピン12と一体の苗供給装置支持フレーム10と植付装置支持ケース30が走行車体1に対して回動自在に一体回転する。
【0013】
図2(a)は多数のポット26aを備えたトレイ26(図1参照)を載置するトレイケース14と該トレイケース14中の1/4の大きさの各トレイ26内のポット26aから苗をピックアップする一対の苗挟持アーム27とその駆動部と苗挟持アーム27とその駆動部を支持する苗供給装置16の斜視図であり、また、図2(b)は苗供給装置16のハブ支持プレート24を取り付けた苗供給装置支持フレーム10の一部の斜視図、図2(c)は走行車体1を中心として、その上下に走行車体1を貫通した位置に配置されるハブ6及びそれに関連する部材の一部を示す側面図、図2(d)は走行車体1より下方に配置される苗植付ホッパ8を含む苗植付装置7の斜視図である。
【0014】
図2(c)に示すように走行車体1の下面には旋回モータ29を配置し、旋回モータ29の回転軸29aに設けたギヤ29bを走行車体1を貫通してピン12と一体回転するギヤ28と噛合させている。
【0015】
また、植付装置支持ケース30の両端部には、一対の苗植付ホッパ8のリンク部材17に一端を回動自在に支持するリンク支持ケース32が一体的に接続している。
【0016】
従って、走行車体1の下面に取り付けられた旋回モータ29を駆動させると、ピン12を中心にピン12と一体の苗供給装置支持フレーム10と植付装置支持ケース30が走行車体1に対して回動自在に一体回転し、苗供給装置支持フレーム10に取り付けられた苗供給装置16と植付装置支持ケース30に取り付けられた苗供給装置16と苗植付装置7は、走行車体1に対して一体的に180度回転させることができる。
【0017】
また、植付装置支持ケース30上には植付モータ34が配置されていて、該植付モータ34の回転軸34aに固定した偏心リング35と該リング35に回動自在に連結したリンクアーム36が上下動用リンク部材17の内の下リンク部材17bにリンクしているので、植付モータ34を駆動させるとホッパ8は上下動できる。
【0018】
なお、一対の上下動用リンク部材17の内の上リンク部材17aのリンク支持ケース32側の端部には該リンク支持ケース32に設けた回動自在の円板32aの側面に一端を回動自在にリンク部材17cを接続している。該リンク部材17cの他端は上下動用リンク部材17の内の上リンク部材17aの端部と連結しており、これらの連結した円板32aとリンク部材17a,17cの組み合わせにより苗植付ホッパ8が前後姿勢を変えながら上下に移動するため、側面視ループ状の植付作動軌跡を描くことができる。
【0019】
また、図2(d)の上側(機体前進方向に向いて右側)のリンク支持ケース32に取り付けられたリンク部材17はモータ34の回転で駆動する円板32aからの動力が左側のホッパ駆動機構9から右側のホッパ駆動機構9へモータ34の駆動力を伝達する図示しない伝動軸により伝達され、両側のホッパ8,8が同時に上下動する。
【0020】
また詳細な説明は省略するが、ホッパ8の上下動用リンク部材17が下動すると、前後方向に二つの部材8a,8bが閉じた状態のホッパ8が圃場面に挿入され、その後ホッパ8の二つの部材8a,8bの下端部が前後に開放することで、予めホッパ8内に挿入されている苗が圃場に供給される構成である。
【0021】
さらに、一以上の適宜の車輪(図1では後輪4)には走行モータ19を取り付けているので、苗移植機は圃場内を走行できる。さらに、走行車体1の上面の前側の一対のコーナ部には車輪旋回モータ21を配置しているので360度に亘り旋回可能なキャスタ2を適宜に旋回させることで前輪3の向きを変えて前進時に旋回ができる。
【0022】
苗供給装置支持フレーム10に両端を支持されたレール37に設けた一対の支柱38の頂部にそれぞれ中間リンク39を回動自在に設け、各中間リンク39の先端部に一対の苗挟持アーム27,27を回動自在に連結している。鉛直方向を向いた各支柱38は苗供給装置支持フレーム10に両端を支持されたレール37に摺動自在に設けられた各基台40上にそれぞれ固定されており、一対の基台40は各基台40に取り付けられた各リニアモータM0でレール37上を左右方向に摺動可能になっている。
【0023】
また、各支柱38の頂部には第1モータM1がそれぞれ設けられ、該第1モータM1で中間リンク39が支柱38の頂部を中心として上下方向に回動可能であり、また各中間リンク39の先端部には第2モータM2がそれぞれ設けられ、各第2モータM2で一対の苗挟持アーム27,27が中間リンク39の先端部を中心として上下方向に回動可能である。
【0024】
また、トレイ26はトレイケース14内に配置される。トレイケース14は図1に示すように挟持アーム27が個々の苗を挟持しやすいように挟持アーム27に向かって傾斜状に苗が配置されるように走行車体1に対して傾斜させて苗供給装置支持フレーム10に固定支持されている。
【0025】
トレイケース14は図3(a)の斜視図に示すように並列配置された一対のトレイ縦送りベルト42,42と該一対の縦送りベルト42,42で矢印方向に搬送されてきたトレイ26を横送りするための横送りベルト43とからなる。横送りベルト43を挟持アーム27に近い方に配置することで、縦送りベルト42の部分に供給した新たなトレイ26が各縦送りベルト42から横送りベルト43に向けて順次トレイ26を移動させ、当該トレイ26中の全ての苗が挟持アーム27により取り出されると、横送りベルト43が作動してトレイケース14から当該トレイ26を排出する。
【0026】
また、車輪旋回モータ21の近傍の走行車体1の上面又は下面には本苗移植機の走行と苗の供給・植付制御のためのコントローラ23(図5参照)を配置している。さらに走行車体1を貫通して設けられたピン12の上端部にはGPSとの送受信用のアンテナ25が取り付けられている。前記コントローラ23により走行制御ではGPSからの受信に基づいて苗移植機を操縦できる。
【0027】
すなわち、図5に示すように通信衛星(GPS)からの信号を苗移植機に設置されているGPSアンテナ25で受信し、GPS基準局のモデムと各苗移植機に内蔵されているモデムを介して基準位置との相違から補正される補正データに基づき各苗移植機に内蔵されているGPS移動局に送信し、そのデータと前記コントローラ23内に記録された圃場地図とから苗移植機の走行径路を決定し、車輪旋回モータ21と走行モータ19を駆動制御して目的の位置に移動した上で、走行車体1上のトレイ26からネギなどの苗を掴んでホッパ8に供給し、移植することができる。
【0028】
ネギのように狭い間隔で多量の苗を植える場合には、苗移植機での苗供給や走行操作のために作業者が苗移植機に付きっきりでいるのは退屈な作業であると同時に寒い季節の作業であるため、ネギの植え付けが好まれない。また、走行車体1といっても走行径路を決めるために前もって車輪3又は4で溝作りのため1度走行しており、苗植付時と合わせると2度同じ所を走行することになり作業効率が良くない。
【0029】
そこで上記のようにGPSを利用する精密な走行制御で、苗移植機を無人走行させても苗供給や走行操作が可能になる。但しトレイ26中のポット26aへの苗補給は作業者が行う必要がある。また本実施例の苗移植機では圃場の地図を内蔵しているので走行のための溝作り走行は不要となり、同一箇所の二度走行を行うことはない。
【0030】
本実施例の苗移植機は圃場端で走行部が横移動できる構成を有するが、このためには苗植付部を180°旋回する必要がある。その理由は、一つの植付行程が終了して次行程で苗を植え付けるためには苗移植機の進行方向を180度変える必要があるためである。従来の苗移植機では、走行車体から苗供給装置と植付装置を支持する支持フレームごと180度回動させようとすると、走行車体と苗供給装置と植付装置を支持する支持フレームとが干渉する配置関係にあった。
【0031】
しかし、本実施例の苗移植機は、図2に示すように、走行車体1のほぼ中央に固定されたピン12が走行車体1の上側のトレイケース14を含む苗供給装置16と走行車体1の下側の苗植付装置7を連結しているため、苗供給装置16と苗植付装置7が走行車体1に干渉することなく一体的に同期してピン16を中心に180°旋回可能となる。
【0032】
図6には、本実施例の苗移植機の自動制御動作を示すフローチャートである。
作業を行う圃場の地図をCD−ROMで入力した後、予定の株間、行程間隔を予め入力し、また長方形の圃場であれば、圃場全体の縦横の長さを地図データ又は機体の走行距離の検出などにより読み取り、例えば、圃場の一端から他端までの移植機の直進走行の1行程分のトレイ26がトレイケース14内にあることを確認すると圃場端に苗移植機がいるかどうかをチェックし、もし圃場端にいれば、移動を停止して前輪3を90度回転させて移植機を横移動させて隣の次行程位置に移る。次いで、走行してきた方向と反対方向に走行させるために、苗の植付装置7を旋回させ、同時に走行方向を今までの走行方向より180度逆方向に切り換える。圃場内での苗移植機のこれらの一連の動きを図7に示す。
【0033】
次いで植え付け準備が整ったらGPSとの交信で圃場内での位置を確認しながら、苗移植機は一二条分の植付行程分の走行と苗の植付を行う。予定の一条分の植付行程での苗の植付作業を行う前に、トレイ26内の最後の株(苗)を挟持アーム27が取ったことが後述する図8のフローチャートのステップ(「J>N」?=yes)で分かると、走行を停止して空になったトレイ26を新規なトレイ26と自動交換する(図3(a)の構成で自動交換できる。)。
【0034】
また、苗移植機が一二条分の植付行程分の走行を終了して圃場の端部に達すると、トレイ26中の残りの株(苗)数を数式(1)で計算し、次の一二条分の植付行程分のシミュレーションをして数式(2)でDを計算する。
C=(トレイ数×穴数)−(カウンタ数) (1)
なお、カウンタ数とは植付株数である。
D=C−(行程距離/株間)×2 (2)
Dがゼロ未満になるとトレイ26内の株(苗)数が足りないので、苗移植機の走行を停止する。Dがゼロ以上であれば、前輪3を90度回転させて苗移植機を横移動させ、次いで苗の植付部を旋回させ、同時に走行方向を今までの走行方向より180度逆方向に切り換え、走行停止して人力でトレイに苗を補給する。
【0035】
図4(a)に示すように、トレイケース14内に矢印i,j方向にトレイ26が配置されている。図4(b)には一対の苗挟持アーム27,27の平面図を示す。一対の苗挟持アーム27,27の対向する面にそれぞれ電磁ソレノイド47,47を設け、電磁ソレノイド47,47に電流を流すことで一対の苗挟持アーム27,27の先端部で苗を挟持することができる。
【0036】
なお、図4(a)に示す例では一対の苗挟持アーム27,27の基部にカラーセンサ50を取り付けているので、トレイ26中の培土の土色に対して苗の緑色をセンサ50が検知すると一対の苗挟持アーム27,27が作動する構成である。
【0037】
図4に示す構成において、苗供給装置16の一対の苗挟持アーム27,27が左右に移動しながらトレイ26中の苗の基部を順次把持するが、このとき茎があるかないかをカラーセンサ50(図1参照)で検出し、なければ次の苗の茎を把持・引き抜いて苗植付装置7のホッパ8に装填する手順で苗を圃場に植え付けていく。
【0038】
カラーセンサ50でトレイ26中の苗の有無をチェックしながら苗を苗供給装置16から苗植付装置7へ移せるので、圃場への苗の植え付けをしない状態(欠株があるという)のまま、苗移植機を走行させるおそれがなくなる。
【0039】
このように、トレイ26中に苗のない部分があれば、その部分を取り出して植え付けても植付欠株となる。この圃場の欠株位置に補植することが不要であり(植えた後の補植不要)、また、トレイ26中に苗のない部分があれば、その部分に予め別の苗を補充して手直しする必要があるが、本構成では、その手直しが不要である
図4(a)に示す構成で、一対の苗挟持アーム27,27がトレイ26中の株(苗)を順次把持するための苗移植機の作動制御のフローチャートを図8に示す。
トレイ26は128穴と200穴を有する場合が多いので、本実施例では128穴と200穴を有するトレイ26が用意されている。
【0040】
128穴と200穴を有するトレイ26(図4(a)の(イ)矢印i方向に設けた穴(M=8個)と矢印j方向に設けた穴(N=16個)の合計128穴を有するトレイ26、又は(ロ)矢印i方向に設けた穴(M=10個)と矢印j方向に設けた穴(N=20個)の合計200穴を有するトレイ26)を用いて矢印i方向に設けた穴の株(苗)を把持し、モータM0が駆動して取り出す苗の左右位置と合う位置に苗挟持アーム27を移動させる。 次にモータM1を駆動させて株を把持する位置に中間リンク39を上下方向に角度θ1=θ1j回転させ、モータM2を上下方向に角度θ2=θ2j回転させて、その後、カラーセンサ50が株(苗)の緑を検出すると、苗挟持アーム27のソレノイド47を作動させて株(苗)を把持させる。
【0041】
次いで、モータM2を上下方向に角度θ2=θ2+α回転させて株(苗)をトレイ26から引き抜き、次いでモータM1を上下方向に角度θ1=θ1h回転させ、同時にモータM2を上下方向に角度θ2=θ2h回転させ、さらにソレノイド47を作動させて苗挟持アーム27,27で把持した株(苗)を苗植付装置7のホッパ8に放擲し、更にモータM2を上下方向に角度θ1=θ10回転させ、同時にモータM2を上下方向に角度θ2=θ10回転させて苗挟持アーム27を退避させる。
【0042】
また、矢印i方向に設けた穴の株(苗)を全てホッパ8に放擲し終えると(I>M)、矢印j方向の(j+1)列目に設けた穴の株(苗)を矢印i方向に順次把持する動作に移る。この様にして矢印j方向の各列目に設けた穴の株(苗)をすべてホッパに放擲し終えると(J>N)、トレイケース14内の空のトレイ26を新たなトレイ26に置き換える。
【0043】
図9には別の苗移植機の斜視図を示す。
走行車体100に一対ずつの前輪101と後輪102が支持され、前後輪101,102の間には走行車体100に支持された実走距離センサ103が配置され、また走行車体100上の前半部には一対の前輪101の駆動軸105を回転制御する走行モータ106とそのバッテリ107が載置され、さらに走行車体100上の後半部には苗トレイ109とホッパ110とホッパ110を上下駆動させる植付モータ113、該モータ113で駆動される左右一対の平行リンク115等を備えた苗植付装置111が設けられている。
【0044】
また苗植付装置111を構成する前記部材を一体的に横移動させる一対のアーム117と該アーム117を貫通するスクリュウねじ118とスクリュウねじ118を正転又は逆転させる横移動モータ119と前記一対のアーム117に取り付けたリニアポテンショメータ121及び後輪102のキャスタ(支持アーム)122を揺動させるスイングモータ123が配置されている。
【0045】
植付モータ113には該モータ113のn回転数センサ113aが取り付けられ、また後輪102には該後輪102のN回転数センサ102aが設けられ、さらに走行車体1の下方後端部には走行車体100の上下制御センサ125が設けられている。
【0046】
また走行車体100の後端部にはハンドル126と該ハンドル126に取り付けられたタッチパネル127とコントローラ129及びハンドル126に付属する後輪102のサイドクラッチレバー130が取り付けられている。
【0047】
ホッパ110に人力で投入された苗は苗植付装置111が下方に移動するのに伴って圃場に挿入されるホッパ110の先端部が開放して苗が圃場に植え付けられる。
【0048】
図10には図9に示す苗移植機の制御のフローチャートを示す。
さらに、植付モータ113のn回転数センサ113aと後輪102のN回転数センサ102aでそれぞれ計測される回転数を制御することで苗の植付株(苗)間が所定値になるように植付モータ113のn回転数と後輪102のN回転数を制御することができる。このステップを図10の*印で始まるステップに示す。
【0049】
図10に示すようにホッパ110から苗を圃場に植え付けた後、所定量だけ前進しながら横移動モータ119が所定量正方向又は逆方向に回転すると左右のいずれかの方向に苗植付装置111を横移動させ、その後ホッパ110から苗を圃場に植え付けることで2条植付が可能となる。また苗を植え付けた後、前記所定量の前進距離の半分の距離を前進して、また前記所定量の半分の横移動をして苗を再び植え付けると千鳥植えができる。
【0050】
なお、植付装置111による苗植付位置の設定は、図12の横移動モータ119の制御のフローチャートに示すように、タッチパネル127の「左」又は「右」を押す操作により、植付装置111が走行車体100に対しての左右方向への横移動位置が設定できる。図11に示すように本苗移植機の横移動モータ119を用いて複数条植えを行う場合には左条の植付位置を設定できる。
【0051】
さらに、図12の本苗移植機の制御のフローチャートに示すように、横移動モータ119による苗植付装置111の左右方向への移動量により、3条植又は4条植えが可能になる。しかも本苗移植機は1台で、圃場の両端部までの往復移動による往復植えをしないで、圃場の一方への走行時の1条分の植付装置111を用いて1条植え、2条植え、3条植え、4条植えおよび千鳥植えができる利点がある。
【0052】
このように株間設定はタッチパネル127より入力で植付モータ113のn回転数と後輪102のN回転数を制御するだけで株間を調節でき、複雑なギヤチェンジ方式の機械は不要となる。
【0053】
また、本苗移植機は全ての駆動部が電動装置を用いて駆動するので排ガスが出ないため、育苗用ハウス内で使用できる。
【産業上の利用可能性】
【0054】
本発明はネギに限らず、各種作物の収穫を自動化できるので将来性の高い収穫ロボットとなる。
【図面の簡単な説明】
【0055】
【図1】本発明の一実施例の苗移植機の斜視図である。
【図2】図1の苗移植機の主要部の分解図である。
【図3】図1の苗移植機のトレーフレームの斜視図(図3(a))とトレイの縦断面図(図3(b))である。
【図4】図1の苗移植機のトレイケース内のトレイの配置を示す斜視図(図4(a))と一対の苗挟持フレームの平面図(図4(b))である。
【図5】図1の苗移植機のGPSとの送受信装置の構成を示す図である。
【図6】図1の苗移植機の作業手順を示すフローチャートである。
【図7】図1の苗移植機の圃場内での苗移植機の動きを示す図である。
【図8】図1の苗移植機の苗移植機のトレー内の苗を挟持フレームで取り出す作業手順を示すフローチャートである。
【図9】本発明の一実施例の苗移植機の斜視図である。
【図10】図9の苗移植機の作業手順を示すフローチャートである。
【図11】図9の苗移植機の作業手順を示すフローチャートである。
【図12】図9の苗移植機の作業手順を示すフローチャートである。
【符号の説明】
【0056】
1 走行車体 2 キャスタ
3 前輪 4 後輪
6 支持部材(ハブ) 7 苗植付装置
8(8a,8b) ホッパ 9 ホッパ駆動機構
10 苗供給装置支持フレーム 12 ピン
14 トレイケース 16 苗供給装置
17(17a,17b,17c) リンク部材
19 走行モータ 21 車輪旋回モータ
23 コントローラ 24 ハブ支持プレート
25 GPS(送受信用)アンテナ
26 トレイ 26a ポット
27 苗挟持アーム 28 ギヤ
29 旋回モータ 29a 回転軸
29b ギア 30 植付装置支持ケース
32 リンク支持ケース 34 植付モータ
34a 回転軸 35 偏心リング
36 リンクアーム 32a 円板
37 レール 38 支柱
39 中間リンク 40 基台
M0 リニアモータ M1 第1モータ
M2 第2モータ 42 縦送りベルト
43 横送りベルト 47 電磁ソレノイド
50 カラーセンサ 100 走行車体
101 前輪 102 後輪
102a N回転数センサ 103 実走距離センサ
105 駆動軸 106 走行モータ
107 バッテリ 109 苗トレイ
110 ホッパ 113 植付モータ
113a n回転数センサ 115 平行リンク
111 苗植付装置 117 アーム
118 スクリュウねじ 119 横移動モータ
121 リニアポテンショメータ 122 キャスタ(支持アーム)
123 スイングモータ 125 上下制御センサ
126 ハンドル 127 タッチパネル
129 コントローラ 130 サイドクラッチレバー
【特許請求の範囲】
【請求項1】
電動モータ駆動式の車輪(3,4)と、
該車輪(3,4)を支持する走行車体(1)と、
該走行車体(1)の上方に配置した苗供給装置(16)と、
走行車体(1)の下方に配置した苗植付装置(7)と、
該走行車体(1)を貫通して苗供給装置(16)と苗植付装置(7)をほぼ水平方向に回動自在に連結する回動軸部(6,12)と、
を備えたことを特徴とする苗移植機。
【請求項1】
電動モータ駆動式の車輪(3,4)と、
該車輪(3,4)を支持する走行車体(1)と、
該走行車体(1)の上方に配置した苗供給装置(16)と、
走行車体(1)の下方に配置した苗植付装置(7)と、
該走行車体(1)を貫通して苗供給装置(16)と苗植付装置(7)をほぼ水平方向に回動自在に連結する回動軸部(6,12)と、
を備えたことを特徴とする苗移植機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2009−5666(P2009−5666A)
【公開日】平成21年1月15日(2009.1.15)
【国際特許分類】
【出願番号】特願2007−172607(P2007−172607)
【出願日】平成19年6月29日(2007.6.29)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
【公開日】平成21年1月15日(2009.1.15)
【国際特許分類】
【出願日】平成19年6月29日(2007.6.29)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
[ Back to top ]