
苗移植機
【課題】 従来技術は、苗に対して一工程の薬剤、又は肥料を供給するための時間が長くかかり、しかも、供給装置の支持部材(左右移動時に案内する部材)を左右方向に長く延長して、苗載台の幅以上の長さに設ける必要があって、大型になって当然、移動距離も長くなる課題がある。更に、従来技術は、苗載台と供給装置とが、一体の状態で共に機体に対して左右に移動するから、機体の重心位置の変動が大きく、機体の左右バランスが崩れ易く、作業時の走行安定性に欠ける課題がある。
【解決手段】 補助苗枠(50)上を通過する予備苗に薬剤又は肥料等を散布する散布装置(4)を設け、該散布装置(4)は、薬剤又は肥料等を充填するタンク(4a)と、該タンク(4a)に充填している薬剤又は肥料等を繰り出す繰出し部(4b)と、該繰出し部(4b)から繰り出す薬剤又は肥料等を苗に散布する散布口(5)を備えた苗移植機とした。
【解決手段】 補助苗枠(50)上を通過する予備苗に薬剤又は肥料等を散布する散布装置(4)を設け、該散布装置(4)は、薬剤又は肥料等を充填するタンク(4a)と、該タンク(4a)に充填している薬剤又は肥料等を繰り出す繰出し部(4b)と、該繰出し部(4b)から繰り出す薬剤又は肥料等を苗に散布する散布口(5)を備えた苗移植機とした。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、苗に対して、薬剤、又は肥料等を散布する散布装置を装備する苗移植機に関する。
【背景技術】
【0002】
この種の苗移植機、すなわち、苗載台に載置された苗に薬剤、又は肥料等を散布する乗用型田植機は、本件の出願前において、例えば、公開特許公報特開2005−95052号に開示されているように、既に、公知の技術となっている。
【0003】
そして、該公開特許公報(特許文献1参照)には、明細書、及び添付図面(図12参照)に、次のように記載されている。すなわち、右及び左の支持部材31、右及び左の供給装置30、右及び左の駆動機構44を備えて、右及び左の支持部材31の一方が平面視で前側に位置し、右及び左の支持部材31の他方が平面視で後ろ側に位置するように構成する。右及び左の供給装置30が右及び左の支持部材31に沿って往復移動しながら、苗に上方から薬剤又は肥料を供給するように構成する。この場合、供給装置30は、該公報の図3、乃至図8に示されているように、支持ブラケット32と支持フレーム33とを介して苗載台13の仕切り部13bに連結した構成(該公報の図6参照)が図示、説明され、併せて、実施例の構成、作用、効果が公報に記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−95052号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来、公知の技術として既に説明したように、苗載台の上方に供給装置を備えて、苗に薬剤、又は肥料を供給する乗用型田植機は、供給装置を、機体に対して左右に往復横移動する苗載台の仕切り部に、支持ブラケットや支持フレームを介して一体に取り付けた構成となっている。したがって、上記乗用型田植機の供給装置は、田植作業時において、苗植付装置に対して左右の方向に往復移動する苗載台と一体となって左右に移動しながら、更に、独自においても、苗載台に対して左右に移動しながら台上に載置している苗に対して薬剤、又は肥料を供給するものである。
【0006】
したがって、従来技術は、苗に対して一工程の薬剤、又は肥料を供給するための時間が長くかかり、しかも、供給装置の支持部材(左右移動時に案内する部材)を左右方向に長く延長して、苗載台の幅以上の長さに設ける必要があって、大型になって当然、移動距離も長くなる課題がある。更に、従来技術は、苗載台と供給装置とが、一体の状態で共に機体に対して左右に移動するから、機体の重心位置の変動が大きく、機体の左右バランスが崩れ易く、作業時の走行安定性に欠ける課題がある。
【課題を解決するための手段】
【0007】
この発明は、上記課題を解決するために、請求項1に記載した発明は、苗植付装置(2)と苗を供給する苗載台(3)とを機体(16a)に装備して設け、該苗載台(3)は、前記苗植付装置(2)に一株づつの苗を供給するために左右に往復移動する構成とし、予備苗を搭載する補助苗枠(50)を設け、補助苗枠(50)上を通過する予備苗に薬剤又は肥料等を散布する散布装置(4)を設け、該散布装置(4)は、薬剤又は肥料等を充填するタンク(4a)と、該タンク(4a)に充填している薬剤又は肥料等を繰り出す繰出し部(4b)と、該繰出し部(4b)から繰り出す薬剤又は肥料等を苗に散布する散布口(5)を備えた苗移植機とした。
【0008】
また、請求項2に記載した発明は、散布装置(4)は、予備苗が通過する位置に通過苗検出センサ(52)を設け、該通過苗検出センサ(52)が予備苗を検出すると自動的に散布口(5)から薬剤を散布する構成とした請求項1に記載の苗移植機とした。
【0009】
また、請求項3に記載した発明は、補助苗枠(50)を、メイン苗枠(50a)の端部に側部補助枠(50b)を接続し、該側部補助枠(50b)を折りたたみできる構成とし、側部補助枠(50b)に散布装置(4)を設けた請求項1又は請求項2に記載の苗移植機とした。
【0010】
また、請求項4に記載した発明は、補助苗枠(50)の側枠(50c)上を移動するガイドローラ(55)で散布装置(4)が移動する構成とし、ガイドローラ(55)の回転が散布ロール(56)ヘ伝動されて薬剤又は肥料等を繰り出す構成とした請求項1に記載の苗移植機とした。
【発明の効果】
【0011】
請求項1に記載した発明によると、補助苗枠(50)上を通過する予備苗に薬剤又は肥料等を散布するので、植付条数による制約をほとんど受けずに装置が大型にならず、適確に散布ができる。
【0012】
請求項2に記載した発明によると、請求項1に記載した発明の効果に加えて、自動化及び省力化が可能となる。
請求項3に記載した発明によると、請求項1又は請求項2に記載した発明の効果に加えて、予備苗が側部補助枠(50b)を通過するとき薬剤又は肥料等を散布することができる。
【0013】
請求項4に記載した発明によると、請求項1に記載した発明の効果に加えて、散布装置(4)の移動により薬剤又は肥料等を散布することができる。
【図面の簡単な説明】
【0014】
【図1】苗移植機の平面図
【図2】苗移植機の側面図
【図3】(A)・(B) 苗載台と散布装置との関連作用図、
【図4】散布装置の作用背面図
【図5】オートローリングの「0」点、補正を示すグラフ
【図6】苗移植機の側面図
【図7】散布装置の背面図
【図8】散布ホースの作用平面図
【図9】散布口の形状を示す図
【図10】散布装置とバランスウエイトとの作用図
【図11】補助苗枠の側面図
【図12】散布装置を補助苗枠に設けた背面図
【図13】側部補助枠に散布装置を設けた背面図
【図14】補助苗枠の上方に散布装置を配置した背面図
【図15】補助苗枠上に散布装置を装置した背面図
【図16】補助苗枠上に散布装置を装置した側面図
【図17】補助苗枠に散布装置を設けた側面図
【図18】苗載台の上に直接散布装置を装置した側面図。
【発明を実施するための形態】
【0015】
まず、苗載台3を機体16aに左右往復移動可能に設けて、その上方位置には、散布装置4、及びこれに付随する散布口5を機体16aに取り付けて、前記苗載台3に対して左右に移動する構成としているが、主要な構成は、苗載台3と散布装置4とを、それぞれ別々の支持装置によって機体16aに取り付け、且つ、その移動方向が相互に逆方向になる構成とし、更に、その両者の移動速度を連動状態に保持しながら移動する構成としている点にある。したがって、この発明に係る苗移植機は、苗載台3と散布装置4とが逆方向に移動する構成に基づいて、散布装置4の移動距離が短くなると共に、機体重心の変動を互いに相殺する関係に作用して、作業時の機体左右バランスの保持が良く、走行が安定する利点があり、苗に対して均一に散布することができる。
【0016】
そして、苗載台3の移動方向に対して散布口5の移動方向を逆にしたことによって、散布口5の移動幅を、苗載台3の横幅より狭く限定できるから、左右移動時の案内部材を短く構成でき、左右移動装置7の小型化を図ることが可能で、軽量でコンパクトな製品を提供できる。
【0017】
以下、この発明の実施例を図面に基づいて具体的に説明する。
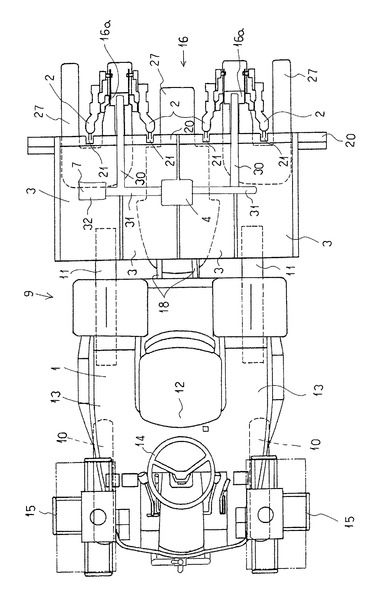
まず、苗移植機9は、図1、及び図2に示すように、機体1の前部には左右一対の前輪10,10を装備し、後部には左右の後輪11,11を軸架して設け、前輪10,10を操舵輪とし、後輪11,11を駆動輪として水田上を走行できる構成としている。そして、操縦座席12は、図面から解るように、機体1の中央位置に高く配置して設け、その前側、及び左右両側から後方に至る低い位置には、フロア13を構成している。そして、ステアリングハンドル14は、図面に示すように、前記操縦座席12からフロア13を隔てた前方に設け、パワステ機構を介して前輪10,10を、軽く舵取り操作ができる構成としている。
【0018】
そして、苗移植機9の各部を操作する操作レバーや操作ペダルの類は、前記ステアリングハンドル14の周囲に集中させて配置し、機体1の各装置を操作し易く構成して、楽に田植作業ができるものとしている。
【0019】
そして、予備苗載台15は、実施例の場合、前記ステアリングハンドル15の左右両側に2段構成にして設け、後方の苗載台3に供給する予備苗を搭載することができる構成としている。
【0020】
つぎに、苗移植機9の主要部となる田植装置16について、図1、及び図2に基づいて具体的に説明する。
まず、田植装置16は、機体1の後部に設けた縦方向の取付杆17に四点平行リンク機構18を介して田植機体16aを連結して設け、植付圃場面の凹凸に順応しながら上下に昇降自由になる構成としている。そして、苗植付装置2は、田植機体16aの後部で、低い位置に設け、田植機体16aの定位置に固着されている前板20の苗取出口21と圃場面との間を植付け軌跡を描きながら循環回動して圃場面に苗を植え付けできる構成としている。
【0021】
そして、苗載台(以下、本件明細書では、田植機の「苗タンク」と同義語である。)3は、図面に示すように、緩い円弧状に形成して上部を前側に傾斜し、下端の苗取り出し側を、前記前板20(側面視L型形状、図2参照)の上に、左右に摺動自由に受け止めさせて設け、中間部の裏側には樋状に形成した案内杆22を設け、この案内杆22を、田植機体16aから上方に延長した支持杆23の上端部に支持した案内レール28に左右摺動自由に嵌合して支持した構成としている。そして、左右往復移動装置6は、図2に示すように、前記田植機体16aの上部位置で、しかも、苗載台3の裏側下方にあって、左右両側から外部に突出して左右に摺動する移動軸に取り付けた左右の連結アーム24を後方に延長して苗載台3に連結し、該苗載台3を左右方向に往復移動する構成としている。
【0022】
このように、苗載台3は、上記の構成の通り、田植機体16a側に固定して設けられている前板20の苗取出口21に対して左右に往復移動しながら、台上に載置しているマット状の苗を一株づつ苗取出口21の内部まで植え付け回動してくる苗植付装置2に供給できる構成としている。
【0023】
なお、25は苗送ベルトであって、図2に示すように、上記苗載台3の苗取出側の底面に巻き回してマット苗が載る状態に設け、苗取出口21に対して苗載台3が左右に往復移動するとき、それぞれの端部(左右両端部)に達する毎に、苗載台3のマット苗を一株分だけ苗植付装置2側に送り出す構成としている。
【0024】
つぎに、整地フロート27は、図面に示すように、田植機体16aの下側に苗植付位置の整地と、併せて、植付深さの調整、位置決めができるように昇降調節自在に設けた構成としている。
【0025】
実施例の場合、田植装置16は、上記整地フロート27の一つをセンサとして利用し、接地圧の検出に基づいて自動制御機構を機能させながら、四点平行リンク機構18を上下に制御して自動的に植付深さを制御する構成を採用している。
【0026】
なお、図2に示す29は昇降シリンダである。
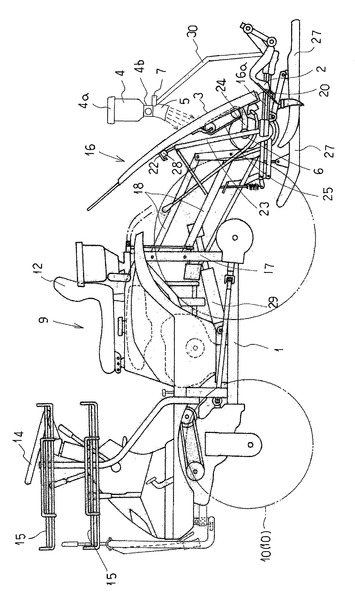
つぎに、散布装置4は、図2に側面図で示すように、タンク4aの下側に繰出し部4bを一体に連結し、更に、その下側に連結した散布口5を下向きに開口し、図1に平面図で示すように、左右の田植機体16aに下部を固着した2本の支持装置30を上方に延長して案内装置31を横向きにして架渡した状態に支持し、該案内装置31に取り付けて支持した構成となっている。この場合、散布装置4は、図面から解るように、苗載台3の上方位置に支持した構成としている。そして、散布装置4は、実施例の場合、散布時には、タンク4aに充填している薬剤、又は肥料等の粉粒物を、繰出し部4bが繰り出して散布口5から苗載台3上に載置されている苗に上側から散布できる構成となっているが、この場合、紛粒物にのみ拘るものではなく、液体肥料が散布できる構成にするのは自由である。
【0027】
そして、散布装置4、及び散布口5は、図面に示す実施例の場合、上述した左右の支持装置30の上端部に架渡し、更に、両方の支持装置30より外側にまで若干延長した案内装置31によって左右移動自在に取り付けて支持した構成としている。この実施例の場合、上記案内装置31は、具体的な内部構成の図示を省略しているが、一方側の端部(実施例では右側端)に左右移動用モータ32を設け、該モータ32によって左右に往復駆動される移動チエンを、前記案内装置31の内部に設けて構成している(図7に示す散布ホース41の移動装置を参照)。そして、該移動チエンは、図示は省略したが、適宜位置に上記した散布装置4を取り付け固着し、常にタンク4aが上に位置し、散布口5が下向きに開口する状態を保ちながら左右に往復移動できる構成になっている。このように、散布装置4、及び散布口5は、前述した苗載台3の左右往復移動装置6とは独立した左右移動装置7によって左右に移動する構成となっている。実施例における左右移動装置7は、上記左右移動用モータ32と、図示しない移動チエンを指している。
【0028】
このように構成した、散布装置4、及び散布口5と苗載台3とは、その左右移動の方向を相互に逆にしており、下側の苗載台3が左方向に移動しているときには、上側の散布装置4が右方向に移動する構成にしている。
【0029】
そして、前記案内装置31は、図1の平面図、及び図3の作用図で解るように、実施例の4条植えの場合、左右の両外側にある苗載台3が交互に左右往復移動するとき、案内装置31の左端部、及び右端部の位置を、苗載台3の左右両端部が最も内側に達した点(前板20の苗取出口21に達した位置)に合わせて構成している。すなわち、散布装置4の左右移動幅(前記案内装置31の左右方向の全長)は、実施例の4条植え場合、前記苗載台3のおおよそ3個分の移動幅になる。
【0030】
そして、苗載台3と散布装置4は、既に説明した通り、それぞれ別の移動装置6,7によって移動する構成にしているが、その移動速度は、同調させて連動状態に保持する構成としている。実施例の場合、左右移動用モータ32は、制御モータとし、左右往復移動装置6にピックアップセンサを設けて苗載台3の移動速度を検出し、その苗載台3の一工程(左端→右端、又は右端→左端)に合わせて散布装置4の一工程(右端→左端、又は左端→右端)が完了できるように移動速度を連動状態に保持できる構成としている。
【0031】
このように構成した苗載台3と散布装置4とは、田植作業、及び薬剤等の散布作業を同時に開始するとき、図3(A)、又は(B)に示すように、作業直前のスタート時点(図3(A)参照)では苗載台3が右端に待機し、散布装置4が左端で待機して、その両者が待機位置からスタートして相互に逆方向に横移動し、一工程終了後、すなわち、苗載台3上の最前列の苗を植え終わったとき(図3(B)参照)には、苗載台3が左端に達し、散布装置4が右端に達して一工程の作業が終わることになる。
【0032】
以上のように、散布装置4は、苗載台3の苗に対して、苗載台3とは逆の方向に移動しながら、苗に対して薬剤等を散布するから、一回の散布工程の移動距離を大幅に短くすることができる。そして、上述した実施例は、苗載台3が左方向に移動すれば、そのすぐ上方において、散布装置4が逆に右方向に移動するから、相互に機体重心位置の変動を相殺する関係に作用して機体16aの左右バランスを崩すことが少なく、作業中における走行が安定し、機体の左右のバランス状態を良好に保持しながら田植作業と散布作業とが同時にできる。そして、実施例では、散布装置4と苗載台3との移動速度を、上述したとおり一方が移動終点に達すると他方も時間差がない状態で移動終点に達するように連動状態を保っているから、移動タイミングに狂いがなく、苗に対して薬剤等の散布むらを起こさずに、均一に散布できるものとなっている。そして、散布装置4と苗載台3とは、移動終点が揃うことによって、次工程のスタート位置が揃う特徴がある。
【0033】
それに加えて、実施例の構成では、散布装置4、及び散布口5の移動幅を、苗載台3の横幅より狭くしているから、2つの支持装置30,30の上部に架渡して取り付けた案内装置31や左右移動装置7の小型化を図ることができ、機体重量を軽くできると共に製造コストを低減できる。更に、機体1の左右バランスの崩れを低減できるものとなっている。
【0034】
つぎに、他の例について説明する。
まず、この種の散布装置4を搭載した移植機1において、苗載台3の左右移動に関連させながらその載置苗に薬剤、又は肥料を散布する構成では、上記苗載台3に加えて散布装置4も横に往復移動するから、田植機体16aの左右バランスが崩れ易く、安定した走行が難しくなる課題がある。
【0035】
通常、この種の苗移植機1は、苗載台3が低部に設けている苗植付装置2に対して一株づつの苗を供給するために往復横移動する構成になっているから、苗載台3の往復横移動に起因して田植機体16aの左右バランスが崩れる問題点があった。そこで、従来から移植機は、ローリング制御装置が搭載され、田植装置の傾きを左右傾斜センサによって検出し、その検出情報に基づいて制御装置が制御信号をアクチュエーターに出力して傾斜状態から水平状態に近い角度まで自動的に修正制御しながら作業を続ける構成になっている。
【0036】
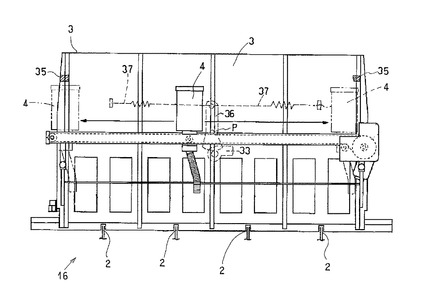
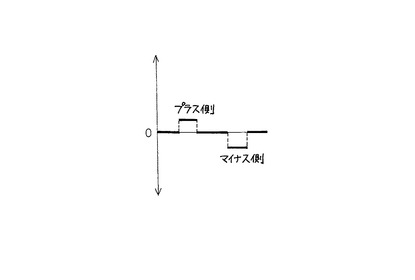
上記の如き前提において、例1は、図4、及び図5に示すように、ローリング制御装置を装備した移植機1において、散布装置4が左側(図3の(A)参照)にあるか、又は右側(図3の(B)参照)に位置するかを左右にある検出センサ35,35で検出し、この検出情報に基づいて制御装置のオートローリングの「0」点を自動補正して制御作業を開始する構成にしている。すなわち、制御装置が、予め、制御の基本データとして記憶している基準値である「0」点を、図5にグラフで示すように、散布装置4が左端に位置するときにはプラス側に「0」点が補正され、右側に位置するときにはマイナス側に「0」点が補正されて、その補正位置を基準にして一工程のローリング制御作動が開始される。
【0037】
そして、ローリング作動アーム36は、図4に点線で示すように、苗載台3の裏側(機体1と田植装置16との間)において、回動中心Pが機体1側に回動自由に軸受支持され、下部が制御モータ33の制御歯車に噛合う扇状歯車とし、上部の左右に連動装置37,37を介して田植装置16に連結した構成としている。
【0038】
なお、田植装置16のローリング制御機構については、従来から公知の技術構成であるから詳細な説明は省略している。
このように、例1は、予め、散布装置4の位置を左右いずれかの検出センサ35で検出して制御装置に検出情報として入力することでローリング制御の基準値(「0」点)を、図5に示すように、+側、又は−側のいずれかに補正しておくことができる。したがって、苗移植機1は、散布装置4の左右移動に対して迅速に対応することが可能であって、田植装置16の傾斜を速目、速目に修正して左右バランスを保持しながら、安定した走行を行って薬剤等の散布と田植作業とが同時にできる。
【0039】
つぎに、例2について説明する。
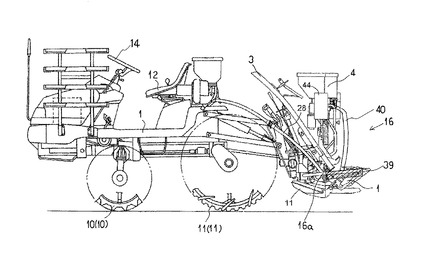
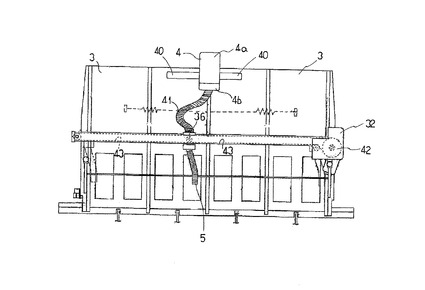
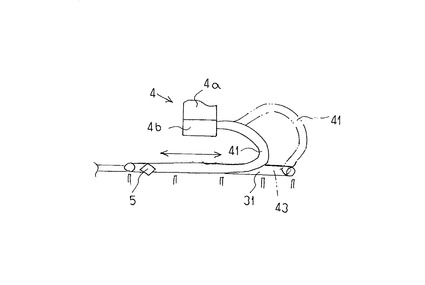
例2は、図6、及び図7に示すように、散布装置4を構成しているタンク4aと繰出し部4bとを、田植機体16aのサイドフレーム39から上方に延長した取付アーム40の上部に取り付けて田植機体16aの定位置に固定支持して構成している。そして、散布ホース41は、図7に示すように、基部を繰出し部4bに連通して先端部位には散布口5を設け、苗載台3の上方で左右往復移動する構成としている。
【0040】
そして、例2は、図7に示すように、右側に装置した左右移動用モータ32によって往復回転駆動されるスプロケット42に巻き掛けてある移動チエン43に前記散布ホース41を取り付けて往復横移動可能に構成している。
【0041】
このように、例2は、図6、及び図7に示すように、散布装置4を構成しているタンク4a、及び繰出し部4bを田植機体16aの定位置に固定して、先端に散布口5を開口した散布ホース41を、苗載台3に対して左右方向に往復横移動する構成にしたから、重量のあるタンク4aが定位置にあって横移動せず、機体16aの左右バランスの崩れが少なく、安定した走行を続けながら、薬剤等の散布作業と田植作業とを同時に行うことができる特徴がある。
【0042】
なお、上記例2の如く、散布ホース41のみを苗載台3に対して左右方向に横移動させる構成の場合、図8に示すように、散布ホース41の基部を繰出し部4bの横側に取り付けて散布可能に構成する手段がある。
【0043】
上記の如く構成すると、散布ホース41は、散布口5を苗載台3に対して往復横移動するとき長く緩んだ場合、図8の仮想線で示すように、逃げ場が確保でき、周囲部材に接触したり干渉することがなく、円滑に横移動することができる。
【0044】
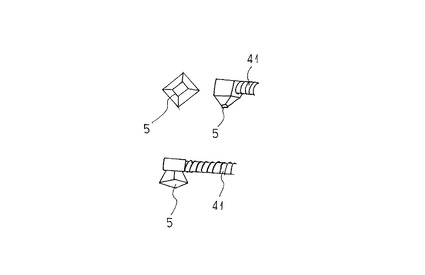
つぎに、例3として、散布ホース41の先端部に設けた散布口5について説明する。
まず、散布口5は、散布作業時において、マット状苗に対して横側から密植状態の苗の中に突入して葉茎に対して左右(横移動する方向に対して)に分草作用を行いながら苗の株元側(苗床)に薬剤や肥料等を散布するために、外周を角錐状に形成して分草作用が効果的にできる形状に形成している。この場合、散布口5は、図9に示すように、散布ホース41の先端部位に四角錐で下部をノズル状に細く形成したり、逆に下部を拡大した形状に形成して、横側から密植状態の苗の中に突入して横移動するとき、苗の葉茎を適確に分草作用ができるように構成している。
【0045】
このように構成すると、散布口5は、苗の中を通過しながら散布するとき、密植状態に生育した苗を進行方向の左右に適確に分草して葉などの絡み付きがなく株元側の苗床まで薬剤を適確に散布できる特徴がある。
【0046】
つぎに、例4について説明する。
例4は、図10に示すように、苗載台3の上方に設けた左右案内装置31の一方側に散布装置4を吊持状に支持し、他方側に散布装置4の重量に相当する重さのバランスウエイト45を吊持ち状態に取り付けて構成する。この場合、散布装置4とバランスウエイト45とは、相互に逆方向に、略同一の速度で横移動するように前記左右案内装置31に設けた構成としている。
【0047】
以上のように構成すれば、田植装置16は、作業中に、苗載台3の苗に対して薬剤等を散布するとき、散布装置4が横移動を開始すると、同時にバランスウエイト45も散布装置4とは逆の方向に移動しながら左右方向の重量の変動を相殺し合って、田植機体16aの傾きがほとんど発生しないようになり、機体16aの左右バランスの崩れを最小に保持することができる。
【0048】
つぎに、多条植田植機(7〜10条植)の場合について述べる。
多条植田植機に装備した散布装置4は、苗載台3の上方に横向きに配置した案内装置31によって往復横移動する構成にするが、多条植の場合、路上走行時等では、左右両端の苗載台3を折り畳んで横幅を狭くする構成が普及している。そのような場合には、案内装置31は、該当部分を苗載台3と同様に折り畳むか、又は伸縮式にして側方に張り出した長い部分を収納する構成にして幅を狭くすることができる。
【0049】
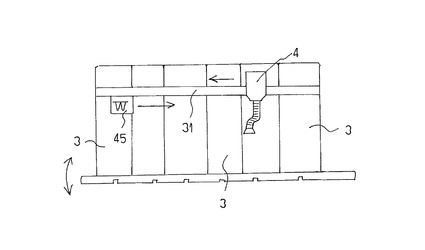
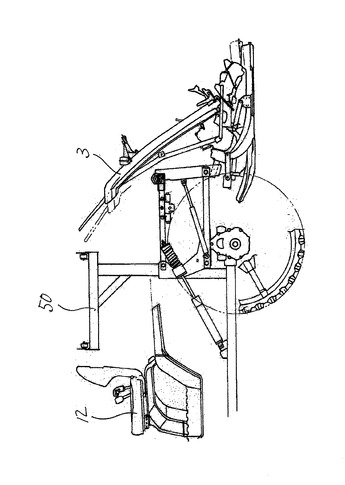
つぎに、図11、乃至図17に基づいて、散布装置4を、補助苗枠50上に装備して、予備苗に対して薬剤、又は肥料等を散布する例について説明する。
まず、補助苗枠50は、図11に示す例の場合、操縦座席12と苗載台3との間に設け、苗載台3の苗を植え終わったとき、又は残り苗が少量になると補充するための予備苗を搭載する構成にしている。
【0050】
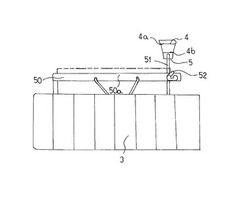
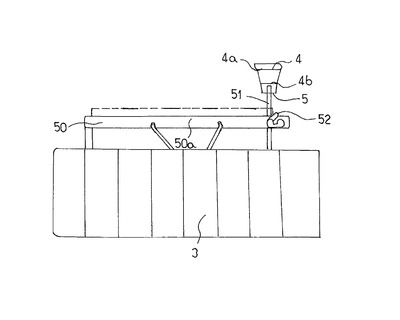
そして、構成例1は、図12に示すように、補助苗枠50を構成しているメイン苗枠50aの側端部で、通常,予備苗を補充する側に散布装置4を支持杆51で取り付けて構成している。そして、散布装置4は、タンク4aと繰出し部4bと散布口5から構成され、下側を通過する予備苗に薬剤等の散布ができる構成としている。そして、構成例1の場合、散布装置4は、図12に示すように、予備苗が通過する下方位置に、通過苗検出センサ52を配置し、該センサ52が予備苗を検出すると、自動的に散布口5から薬剤を散布する構成としている。
【0051】
上記構成例1は、補助苗枠50に装填する予備苗に対して、薬剤を散布するものであって、しかも、散布装置4を定位置に装置した構成であるから、従来の構成の如く、特に、7,8条から10条の多条植えになると植付中の苗載台3に載置されている苗に散布するのは、きわめて困難な問題があったが、上記構成例1の如く、補助苗枠50に装填する予備苗に散布する構成であれば、植付条数に左右されることはなく、適確に散布ができ、自動化、省力化が可能となる。
【0052】
更に、上記構成例1は、従来の如く、田植装置16の左右重量バランスに影響することがなく、有効なものとなった。
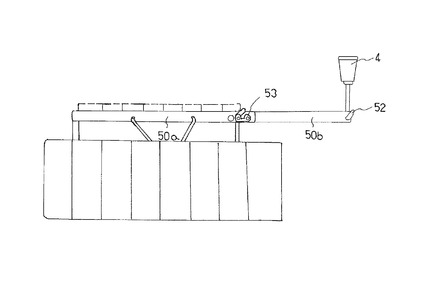
つぎに、構成例2は、図13に示すように、前記メイン苗枠50aの端部に側部補助枠50bを折り畳み自由にして接続しており、多量の予備苗を搭載するとき(例えば、7〜10条植田植機)にはその側部補助枠50bを水平に横に伸ばして止め具53で固定する構成にしている。そして、散布装置4は、図13に示すように、横側に伸ばして固定した側部補助枠50bの外側端部に取り付けた構成とする。そして、散布装置4は、上記した構成例1と同様に通過苗検出センサ52を予備苗の通る位置に設けて構成している。
【0053】
このように構成すると、散布装置4は、補助苗枠50に装填する予備苗が下側の側部補助枠50bを通過するとき前記通過苗検出センサ52に検出され薬剤を散布することができる。
【0054】
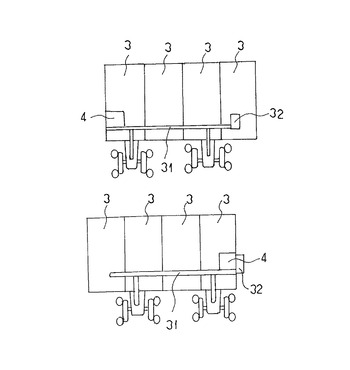
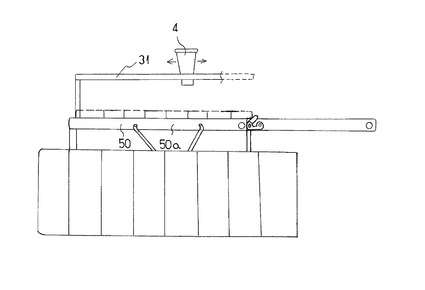
つぎに、構成例3は、図14に示すように、上述した補助苗枠50において、予備苗の装填が全て終了すると、散布装置4が案内装置31上を予備苗側に移動しながら下方の予備苗に対して薬剤を散布する構成としている。
【0055】
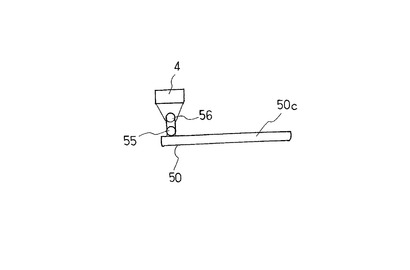
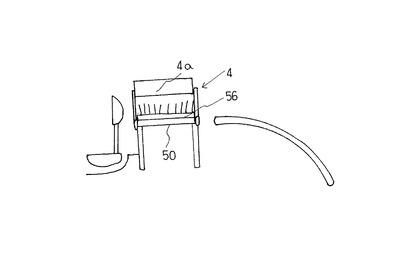
そして、構成例4は、図15に示すように、手動繰出し式の散布装置4を補助苗枠50上にセットして、その補助苗枠50の側枠50c上をガイドローラ55が転びながら左右方向に移動させる構成としている。この場合、散布装置4は、上記ガイドローラ55が側枠50c上を転動すると、その回転力が散布ロール56に伝動されて上側のタンク4aから繰出し、薬剤の散布ができる構成としている。
【0056】
以上述べたように、構成例1、乃至4は、補助苗枠50上に装填した予備苗に対して薬剤、又は肥料等を散布する実施態様であって、予備苗の装填に伴って行うことができるから、田植装置16側の植付条数による制約をほとんど受けることがなく、例えば7〜10条植えであっても、装置が大型になることはない。
【0057】
つぎに、図16、乃至図18に示す例について説明する。
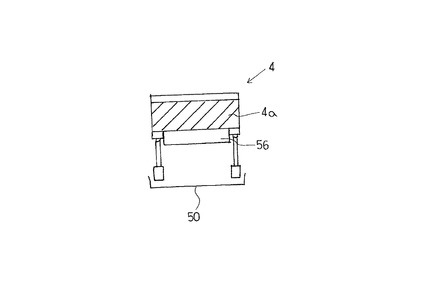
まず、散布装置4は、上部のタンク4aの下側に散布ロール56が軸架され、この散布ロール56の回転によって定量の薬剤、例えば、除草剤が下側に散布できる構成としている。図16、及び図17に示す例は、補助苗枠50に苗を装填するとき、その予備苗の上に散布装置4を取り付けて移動すると、除草剤が散布ロール56によって定量づつ繰出されてマット苗に散布することができる。
【0058】
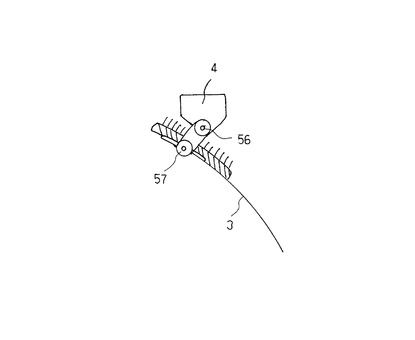
又、散布装置4は、図18に示す例の場合、苗載台3の上部側で苗の供給側に装置している。この散布装置4は、苗載台3の底面に検出ローラ57を軸架して設け、上側から苗載台3に供給されるマット苗が、該ローラ57上を通過すると、マット苗によって前記検出ローラ57が回されて上側の散布ローラ56を伝動してタンク4a内の除草剤を散布する構成となっている。
【0059】
このように、図18に示す例は、電装品を使用せず、検出ローラ57がマット苗によって回されて、上側の散布ローラ56が伝動される構成であるから低コストで製作でき、苗の供給操作で散布ができる手数のかからない利点がある。
【符号の説明】
【0060】
1:機体、2:苗植付装置、3:苗載台、4:散布装置、4a:タンク、4b:繰出し部、5:散布口、9:苗移植機、16a:田植機体、50:補助苗枠、50a:メイン苗枠、50b:側部補助枠、50c:側枠、52:通過苗検出センサ、55:ガイドローラ、56:散布ロール
【技術分野】
【0001】
この発明は、苗に対して、薬剤、又は肥料等を散布する散布装置を装備する苗移植機に関する。
【背景技術】
【0002】
この種の苗移植機、すなわち、苗載台に載置された苗に薬剤、又は肥料等を散布する乗用型田植機は、本件の出願前において、例えば、公開特許公報特開2005−95052号に開示されているように、既に、公知の技術となっている。
【0003】
そして、該公開特許公報(特許文献1参照)には、明細書、及び添付図面(図12参照)に、次のように記載されている。すなわち、右及び左の支持部材31、右及び左の供給装置30、右及び左の駆動機構44を備えて、右及び左の支持部材31の一方が平面視で前側に位置し、右及び左の支持部材31の他方が平面視で後ろ側に位置するように構成する。右及び左の供給装置30が右及び左の支持部材31に沿って往復移動しながら、苗に上方から薬剤又は肥料を供給するように構成する。この場合、供給装置30は、該公報の図3、乃至図8に示されているように、支持ブラケット32と支持フレーム33とを介して苗載台13の仕切り部13bに連結した構成(該公報の図6参照)が図示、説明され、併せて、実施例の構成、作用、効果が公報に記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−95052号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来、公知の技術として既に説明したように、苗載台の上方に供給装置を備えて、苗に薬剤、又は肥料を供給する乗用型田植機は、供給装置を、機体に対して左右に往復横移動する苗載台の仕切り部に、支持ブラケットや支持フレームを介して一体に取り付けた構成となっている。したがって、上記乗用型田植機の供給装置は、田植作業時において、苗植付装置に対して左右の方向に往復移動する苗載台と一体となって左右に移動しながら、更に、独自においても、苗載台に対して左右に移動しながら台上に載置している苗に対して薬剤、又は肥料を供給するものである。
【0006】
したがって、従来技術は、苗に対して一工程の薬剤、又は肥料を供給するための時間が長くかかり、しかも、供給装置の支持部材(左右移動時に案内する部材)を左右方向に長く延長して、苗載台の幅以上の長さに設ける必要があって、大型になって当然、移動距離も長くなる課題がある。更に、従来技術は、苗載台と供給装置とが、一体の状態で共に機体に対して左右に移動するから、機体の重心位置の変動が大きく、機体の左右バランスが崩れ易く、作業時の走行安定性に欠ける課題がある。
【課題を解決するための手段】
【0007】
この発明は、上記課題を解決するために、請求項1に記載した発明は、苗植付装置(2)と苗を供給する苗載台(3)とを機体(16a)に装備して設け、該苗載台(3)は、前記苗植付装置(2)に一株づつの苗を供給するために左右に往復移動する構成とし、予備苗を搭載する補助苗枠(50)を設け、補助苗枠(50)上を通過する予備苗に薬剤又は肥料等を散布する散布装置(4)を設け、該散布装置(4)は、薬剤又は肥料等を充填するタンク(4a)と、該タンク(4a)に充填している薬剤又は肥料等を繰り出す繰出し部(4b)と、該繰出し部(4b)から繰り出す薬剤又は肥料等を苗に散布する散布口(5)を備えた苗移植機とした。
【0008】
また、請求項2に記載した発明は、散布装置(4)は、予備苗が通過する位置に通過苗検出センサ(52)を設け、該通過苗検出センサ(52)が予備苗を検出すると自動的に散布口(5)から薬剤を散布する構成とした請求項1に記載の苗移植機とした。
【0009】
また、請求項3に記載した発明は、補助苗枠(50)を、メイン苗枠(50a)の端部に側部補助枠(50b)を接続し、該側部補助枠(50b)を折りたたみできる構成とし、側部補助枠(50b)に散布装置(4)を設けた請求項1又は請求項2に記載の苗移植機とした。
【0010】
また、請求項4に記載した発明は、補助苗枠(50)の側枠(50c)上を移動するガイドローラ(55)で散布装置(4)が移動する構成とし、ガイドローラ(55)の回転が散布ロール(56)ヘ伝動されて薬剤又は肥料等を繰り出す構成とした請求項1に記載の苗移植機とした。
【発明の効果】
【0011】
請求項1に記載した発明によると、補助苗枠(50)上を通過する予備苗に薬剤又は肥料等を散布するので、植付条数による制約をほとんど受けずに装置が大型にならず、適確に散布ができる。
【0012】
請求項2に記載した発明によると、請求項1に記載した発明の効果に加えて、自動化及び省力化が可能となる。
請求項3に記載した発明によると、請求項1又は請求項2に記載した発明の効果に加えて、予備苗が側部補助枠(50b)を通過するとき薬剤又は肥料等を散布することができる。
【0013】
請求項4に記載した発明によると、請求項1に記載した発明の効果に加えて、散布装置(4)の移動により薬剤又は肥料等を散布することができる。
【図面の簡単な説明】
【0014】
【図1】苗移植機の平面図
【図2】苗移植機の側面図
【図3】(A)・(B) 苗載台と散布装置との関連作用図、
【図4】散布装置の作用背面図
【図5】オートローリングの「0」点、補正を示すグラフ
【図6】苗移植機の側面図
【図7】散布装置の背面図
【図8】散布ホースの作用平面図
【図9】散布口の形状を示す図
【図10】散布装置とバランスウエイトとの作用図
【図11】補助苗枠の側面図
【図12】散布装置を補助苗枠に設けた背面図
【図13】側部補助枠に散布装置を設けた背面図
【図14】補助苗枠の上方に散布装置を配置した背面図
【図15】補助苗枠上に散布装置を装置した背面図
【図16】補助苗枠上に散布装置を装置した側面図
【図17】補助苗枠に散布装置を設けた側面図
【図18】苗載台の上に直接散布装置を装置した側面図。
【発明を実施するための形態】
【0015】
まず、苗載台3を機体16aに左右往復移動可能に設けて、その上方位置には、散布装置4、及びこれに付随する散布口5を機体16aに取り付けて、前記苗載台3に対して左右に移動する構成としているが、主要な構成は、苗載台3と散布装置4とを、それぞれ別々の支持装置によって機体16aに取り付け、且つ、その移動方向が相互に逆方向になる構成とし、更に、その両者の移動速度を連動状態に保持しながら移動する構成としている点にある。したがって、この発明に係る苗移植機は、苗載台3と散布装置4とが逆方向に移動する構成に基づいて、散布装置4の移動距離が短くなると共に、機体重心の変動を互いに相殺する関係に作用して、作業時の機体左右バランスの保持が良く、走行が安定する利点があり、苗に対して均一に散布することができる。
【0016】
そして、苗載台3の移動方向に対して散布口5の移動方向を逆にしたことによって、散布口5の移動幅を、苗載台3の横幅より狭く限定できるから、左右移動時の案内部材を短く構成でき、左右移動装置7の小型化を図ることが可能で、軽量でコンパクトな製品を提供できる。
【0017】
以下、この発明の実施例を図面に基づいて具体的に説明する。
まず、苗移植機9は、図1、及び図2に示すように、機体1の前部には左右一対の前輪10,10を装備し、後部には左右の後輪11,11を軸架して設け、前輪10,10を操舵輪とし、後輪11,11を駆動輪として水田上を走行できる構成としている。そして、操縦座席12は、図面から解るように、機体1の中央位置に高く配置して設け、その前側、及び左右両側から後方に至る低い位置には、フロア13を構成している。そして、ステアリングハンドル14は、図面に示すように、前記操縦座席12からフロア13を隔てた前方に設け、パワステ機構を介して前輪10,10を、軽く舵取り操作ができる構成としている。
【0018】
そして、苗移植機9の各部を操作する操作レバーや操作ペダルの類は、前記ステアリングハンドル14の周囲に集中させて配置し、機体1の各装置を操作し易く構成して、楽に田植作業ができるものとしている。
【0019】
そして、予備苗載台15は、実施例の場合、前記ステアリングハンドル15の左右両側に2段構成にして設け、後方の苗載台3に供給する予備苗を搭載することができる構成としている。
【0020】
つぎに、苗移植機9の主要部となる田植装置16について、図1、及び図2に基づいて具体的に説明する。
まず、田植装置16は、機体1の後部に設けた縦方向の取付杆17に四点平行リンク機構18を介して田植機体16aを連結して設け、植付圃場面の凹凸に順応しながら上下に昇降自由になる構成としている。そして、苗植付装置2は、田植機体16aの後部で、低い位置に設け、田植機体16aの定位置に固着されている前板20の苗取出口21と圃場面との間を植付け軌跡を描きながら循環回動して圃場面に苗を植え付けできる構成としている。
【0021】
そして、苗載台(以下、本件明細書では、田植機の「苗タンク」と同義語である。)3は、図面に示すように、緩い円弧状に形成して上部を前側に傾斜し、下端の苗取り出し側を、前記前板20(側面視L型形状、図2参照)の上に、左右に摺動自由に受け止めさせて設け、中間部の裏側には樋状に形成した案内杆22を設け、この案内杆22を、田植機体16aから上方に延長した支持杆23の上端部に支持した案内レール28に左右摺動自由に嵌合して支持した構成としている。そして、左右往復移動装置6は、図2に示すように、前記田植機体16aの上部位置で、しかも、苗載台3の裏側下方にあって、左右両側から外部に突出して左右に摺動する移動軸に取り付けた左右の連結アーム24を後方に延長して苗載台3に連結し、該苗載台3を左右方向に往復移動する構成としている。
【0022】
このように、苗載台3は、上記の構成の通り、田植機体16a側に固定して設けられている前板20の苗取出口21に対して左右に往復移動しながら、台上に載置しているマット状の苗を一株づつ苗取出口21の内部まで植え付け回動してくる苗植付装置2に供給できる構成としている。
【0023】
なお、25は苗送ベルトであって、図2に示すように、上記苗載台3の苗取出側の底面に巻き回してマット苗が載る状態に設け、苗取出口21に対して苗載台3が左右に往復移動するとき、それぞれの端部(左右両端部)に達する毎に、苗載台3のマット苗を一株分だけ苗植付装置2側に送り出す構成としている。
【0024】
つぎに、整地フロート27は、図面に示すように、田植機体16aの下側に苗植付位置の整地と、併せて、植付深さの調整、位置決めができるように昇降調節自在に設けた構成としている。
【0025】
実施例の場合、田植装置16は、上記整地フロート27の一つをセンサとして利用し、接地圧の検出に基づいて自動制御機構を機能させながら、四点平行リンク機構18を上下に制御して自動的に植付深さを制御する構成を採用している。
【0026】
なお、図2に示す29は昇降シリンダである。
つぎに、散布装置4は、図2に側面図で示すように、タンク4aの下側に繰出し部4bを一体に連結し、更に、その下側に連結した散布口5を下向きに開口し、図1に平面図で示すように、左右の田植機体16aに下部を固着した2本の支持装置30を上方に延長して案内装置31を横向きにして架渡した状態に支持し、該案内装置31に取り付けて支持した構成となっている。この場合、散布装置4は、図面から解るように、苗載台3の上方位置に支持した構成としている。そして、散布装置4は、実施例の場合、散布時には、タンク4aに充填している薬剤、又は肥料等の粉粒物を、繰出し部4bが繰り出して散布口5から苗載台3上に載置されている苗に上側から散布できる構成となっているが、この場合、紛粒物にのみ拘るものではなく、液体肥料が散布できる構成にするのは自由である。
【0027】
そして、散布装置4、及び散布口5は、図面に示す実施例の場合、上述した左右の支持装置30の上端部に架渡し、更に、両方の支持装置30より外側にまで若干延長した案内装置31によって左右移動自在に取り付けて支持した構成としている。この実施例の場合、上記案内装置31は、具体的な内部構成の図示を省略しているが、一方側の端部(実施例では右側端)に左右移動用モータ32を設け、該モータ32によって左右に往復駆動される移動チエンを、前記案内装置31の内部に設けて構成している(図7に示す散布ホース41の移動装置を参照)。そして、該移動チエンは、図示は省略したが、適宜位置に上記した散布装置4を取り付け固着し、常にタンク4aが上に位置し、散布口5が下向きに開口する状態を保ちながら左右に往復移動できる構成になっている。このように、散布装置4、及び散布口5は、前述した苗載台3の左右往復移動装置6とは独立した左右移動装置7によって左右に移動する構成となっている。実施例における左右移動装置7は、上記左右移動用モータ32と、図示しない移動チエンを指している。
【0028】
このように構成した、散布装置4、及び散布口5と苗載台3とは、その左右移動の方向を相互に逆にしており、下側の苗載台3が左方向に移動しているときには、上側の散布装置4が右方向に移動する構成にしている。
【0029】
そして、前記案内装置31は、図1の平面図、及び図3の作用図で解るように、実施例の4条植えの場合、左右の両外側にある苗載台3が交互に左右往復移動するとき、案内装置31の左端部、及び右端部の位置を、苗載台3の左右両端部が最も内側に達した点(前板20の苗取出口21に達した位置)に合わせて構成している。すなわち、散布装置4の左右移動幅(前記案内装置31の左右方向の全長)は、実施例の4条植え場合、前記苗載台3のおおよそ3個分の移動幅になる。
【0030】
そして、苗載台3と散布装置4は、既に説明した通り、それぞれ別の移動装置6,7によって移動する構成にしているが、その移動速度は、同調させて連動状態に保持する構成としている。実施例の場合、左右移動用モータ32は、制御モータとし、左右往復移動装置6にピックアップセンサを設けて苗載台3の移動速度を検出し、その苗載台3の一工程(左端→右端、又は右端→左端)に合わせて散布装置4の一工程(右端→左端、又は左端→右端)が完了できるように移動速度を連動状態に保持できる構成としている。
【0031】
このように構成した苗載台3と散布装置4とは、田植作業、及び薬剤等の散布作業を同時に開始するとき、図3(A)、又は(B)に示すように、作業直前のスタート時点(図3(A)参照)では苗載台3が右端に待機し、散布装置4が左端で待機して、その両者が待機位置からスタートして相互に逆方向に横移動し、一工程終了後、すなわち、苗載台3上の最前列の苗を植え終わったとき(図3(B)参照)には、苗載台3が左端に達し、散布装置4が右端に達して一工程の作業が終わることになる。
【0032】
以上のように、散布装置4は、苗載台3の苗に対して、苗載台3とは逆の方向に移動しながら、苗に対して薬剤等を散布するから、一回の散布工程の移動距離を大幅に短くすることができる。そして、上述した実施例は、苗載台3が左方向に移動すれば、そのすぐ上方において、散布装置4が逆に右方向に移動するから、相互に機体重心位置の変動を相殺する関係に作用して機体16aの左右バランスを崩すことが少なく、作業中における走行が安定し、機体の左右のバランス状態を良好に保持しながら田植作業と散布作業とが同時にできる。そして、実施例では、散布装置4と苗載台3との移動速度を、上述したとおり一方が移動終点に達すると他方も時間差がない状態で移動終点に達するように連動状態を保っているから、移動タイミングに狂いがなく、苗に対して薬剤等の散布むらを起こさずに、均一に散布できるものとなっている。そして、散布装置4と苗載台3とは、移動終点が揃うことによって、次工程のスタート位置が揃う特徴がある。
【0033】
それに加えて、実施例の構成では、散布装置4、及び散布口5の移動幅を、苗載台3の横幅より狭くしているから、2つの支持装置30,30の上部に架渡して取り付けた案内装置31や左右移動装置7の小型化を図ることができ、機体重量を軽くできると共に製造コストを低減できる。更に、機体1の左右バランスの崩れを低減できるものとなっている。
【0034】
つぎに、他の例について説明する。
まず、この種の散布装置4を搭載した移植機1において、苗載台3の左右移動に関連させながらその載置苗に薬剤、又は肥料を散布する構成では、上記苗載台3に加えて散布装置4も横に往復移動するから、田植機体16aの左右バランスが崩れ易く、安定した走行が難しくなる課題がある。
【0035】
通常、この種の苗移植機1は、苗載台3が低部に設けている苗植付装置2に対して一株づつの苗を供給するために往復横移動する構成になっているから、苗載台3の往復横移動に起因して田植機体16aの左右バランスが崩れる問題点があった。そこで、従来から移植機は、ローリング制御装置が搭載され、田植装置の傾きを左右傾斜センサによって検出し、その検出情報に基づいて制御装置が制御信号をアクチュエーターに出力して傾斜状態から水平状態に近い角度まで自動的に修正制御しながら作業を続ける構成になっている。
【0036】
上記の如き前提において、例1は、図4、及び図5に示すように、ローリング制御装置を装備した移植機1において、散布装置4が左側(図3の(A)参照)にあるか、又は右側(図3の(B)参照)に位置するかを左右にある検出センサ35,35で検出し、この検出情報に基づいて制御装置のオートローリングの「0」点を自動補正して制御作業を開始する構成にしている。すなわち、制御装置が、予め、制御の基本データとして記憶している基準値である「0」点を、図5にグラフで示すように、散布装置4が左端に位置するときにはプラス側に「0」点が補正され、右側に位置するときにはマイナス側に「0」点が補正されて、その補正位置を基準にして一工程のローリング制御作動が開始される。
【0037】
そして、ローリング作動アーム36は、図4に点線で示すように、苗載台3の裏側(機体1と田植装置16との間)において、回動中心Pが機体1側に回動自由に軸受支持され、下部が制御モータ33の制御歯車に噛合う扇状歯車とし、上部の左右に連動装置37,37を介して田植装置16に連結した構成としている。
【0038】
なお、田植装置16のローリング制御機構については、従来から公知の技術構成であるから詳細な説明は省略している。
このように、例1は、予め、散布装置4の位置を左右いずれかの検出センサ35で検出して制御装置に検出情報として入力することでローリング制御の基準値(「0」点)を、図5に示すように、+側、又は−側のいずれかに補正しておくことができる。したがって、苗移植機1は、散布装置4の左右移動に対して迅速に対応することが可能であって、田植装置16の傾斜を速目、速目に修正して左右バランスを保持しながら、安定した走行を行って薬剤等の散布と田植作業とが同時にできる。
【0039】
つぎに、例2について説明する。
例2は、図6、及び図7に示すように、散布装置4を構成しているタンク4aと繰出し部4bとを、田植機体16aのサイドフレーム39から上方に延長した取付アーム40の上部に取り付けて田植機体16aの定位置に固定支持して構成している。そして、散布ホース41は、図7に示すように、基部を繰出し部4bに連通して先端部位には散布口5を設け、苗載台3の上方で左右往復移動する構成としている。
【0040】
そして、例2は、図7に示すように、右側に装置した左右移動用モータ32によって往復回転駆動されるスプロケット42に巻き掛けてある移動チエン43に前記散布ホース41を取り付けて往復横移動可能に構成している。
【0041】
このように、例2は、図6、及び図7に示すように、散布装置4を構成しているタンク4a、及び繰出し部4bを田植機体16aの定位置に固定して、先端に散布口5を開口した散布ホース41を、苗載台3に対して左右方向に往復横移動する構成にしたから、重量のあるタンク4aが定位置にあって横移動せず、機体16aの左右バランスの崩れが少なく、安定した走行を続けながら、薬剤等の散布作業と田植作業とを同時に行うことができる特徴がある。
【0042】
なお、上記例2の如く、散布ホース41のみを苗載台3に対して左右方向に横移動させる構成の場合、図8に示すように、散布ホース41の基部を繰出し部4bの横側に取り付けて散布可能に構成する手段がある。
【0043】
上記の如く構成すると、散布ホース41は、散布口5を苗載台3に対して往復横移動するとき長く緩んだ場合、図8の仮想線で示すように、逃げ場が確保でき、周囲部材に接触したり干渉することがなく、円滑に横移動することができる。
【0044】
つぎに、例3として、散布ホース41の先端部に設けた散布口5について説明する。
まず、散布口5は、散布作業時において、マット状苗に対して横側から密植状態の苗の中に突入して葉茎に対して左右(横移動する方向に対して)に分草作用を行いながら苗の株元側(苗床)に薬剤や肥料等を散布するために、外周を角錐状に形成して分草作用が効果的にできる形状に形成している。この場合、散布口5は、図9に示すように、散布ホース41の先端部位に四角錐で下部をノズル状に細く形成したり、逆に下部を拡大した形状に形成して、横側から密植状態の苗の中に突入して横移動するとき、苗の葉茎を適確に分草作用ができるように構成している。
【0045】
このように構成すると、散布口5は、苗の中を通過しながら散布するとき、密植状態に生育した苗を進行方向の左右に適確に分草して葉などの絡み付きがなく株元側の苗床まで薬剤を適確に散布できる特徴がある。
【0046】
つぎに、例4について説明する。
例4は、図10に示すように、苗載台3の上方に設けた左右案内装置31の一方側に散布装置4を吊持状に支持し、他方側に散布装置4の重量に相当する重さのバランスウエイト45を吊持ち状態に取り付けて構成する。この場合、散布装置4とバランスウエイト45とは、相互に逆方向に、略同一の速度で横移動するように前記左右案内装置31に設けた構成としている。
【0047】
以上のように構成すれば、田植装置16は、作業中に、苗載台3の苗に対して薬剤等を散布するとき、散布装置4が横移動を開始すると、同時にバランスウエイト45も散布装置4とは逆の方向に移動しながら左右方向の重量の変動を相殺し合って、田植機体16aの傾きがほとんど発生しないようになり、機体16aの左右バランスの崩れを最小に保持することができる。
【0048】
つぎに、多条植田植機(7〜10条植)の場合について述べる。
多条植田植機に装備した散布装置4は、苗載台3の上方に横向きに配置した案内装置31によって往復横移動する構成にするが、多条植の場合、路上走行時等では、左右両端の苗載台3を折り畳んで横幅を狭くする構成が普及している。そのような場合には、案内装置31は、該当部分を苗載台3と同様に折り畳むか、又は伸縮式にして側方に張り出した長い部分を収納する構成にして幅を狭くすることができる。
【0049】
つぎに、図11、乃至図17に基づいて、散布装置4を、補助苗枠50上に装備して、予備苗に対して薬剤、又は肥料等を散布する例について説明する。
まず、補助苗枠50は、図11に示す例の場合、操縦座席12と苗載台3との間に設け、苗載台3の苗を植え終わったとき、又は残り苗が少量になると補充するための予備苗を搭載する構成にしている。
【0050】
そして、構成例1は、図12に示すように、補助苗枠50を構成しているメイン苗枠50aの側端部で、通常,予備苗を補充する側に散布装置4を支持杆51で取り付けて構成している。そして、散布装置4は、タンク4aと繰出し部4bと散布口5から構成され、下側を通過する予備苗に薬剤等の散布ができる構成としている。そして、構成例1の場合、散布装置4は、図12に示すように、予備苗が通過する下方位置に、通過苗検出センサ52を配置し、該センサ52が予備苗を検出すると、自動的に散布口5から薬剤を散布する構成としている。
【0051】
上記構成例1は、補助苗枠50に装填する予備苗に対して、薬剤を散布するものであって、しかも、散布装置4を定位置に装置した構成であるから、従来の構成の如く、特に、7,8条から10条の多条植えになると植付中の苗載台3に載置されている苗に散布するのは、きわめて困難な問題があったが、上記構成例1の如く、補助苗枠50に装填する予備苗に散布する構成であれば、植付条数に左右されることはなく、適確に散布ができ、自動化、省力化が可能となる。
【0052】
更に、上記構成例1は、従来の如く、田植装置16の左右重量バランスに影響することがなく、有効なものとなった。
つぎに、構成例2は、図13に示すように、前記メイン苗枠50aの端部に側部補助枠50bを折り畳み自由にして接続しており、多量の予備苗を搭載するとき(例えば、7〜10条植田植機)にはその側部補助枠50bを水平に横に伸ばして止め具53で固定する構成にしている。そして、散布装置4は、図13に示すように、横側に伸ばして固定した側部補助枠50bの外側端部に取り付けた構成とする。そして、散布装置4は、上記した構成例1と同様に通過苗検出センサ52を予備苗の通る位置に設けて構成している。
【0053】
このように構成すると、散布装置4は、補助苗枠50に装填する予備苗が下側の側部補助枠50bを通過するとき前記通過苗検出センサ52に検出され薬剤を散布することができる。
【0054】
つぎに、構成例3は、図14に示すように、上述した補助苗枠50において、予備苗の装填が全て終了すると、散布装置4が案内装置31上を予備苗側に移動しながら下方の予備苗に対して薬剤を散布する構成としている。
【0055】
そして、構成例4は、図15に示すように、手動繰出し式の散布装置4を補助苗枠50上にセットして、その補助苗枠50の側枠50c上をガイドローラ55が転びながら左右方向に移動させる構成としている。この場合、散布装置4は、上記ガイドローラ55が側枠50c上を転動すると、その回転力が散布ロール56に伝動されて上側のタンク4aから繰出し、薬剤の散布ができる構成としている。
【0056】
以上述べたように、構成例1、乃至4は、補助苗枠50上に装填した予備苗に対して薬剤、又は肥料等を散布する実施態様であって、予備苗の装填に伴って行うことができるから、田植装置16側の植付条数による制約をほとんど受けることがなく、例えば7〜10条植えであっても、装置が大型になることはない。
【0057】
つぎに、図16、乃至図18に示す例について説明する。
まず、散布装置4は、上部のタンク4aの下側に散布ロール56が軸架され、この散布ロール56の回転によって定量の薬剤、例えば、除草剤が下側に散布できる構成としている。図16、及び図17に示す例は、補助苗枠50に苗を装填するとき、その予備苗の上に散布装置4を取り付けて移動すると、除草剤が散布ロール56によって定量づつ繰出されてマット苗に散布することができる。
【0058】
又、散布装置4は、図18に示す例の場合、苗載台3の上部側で苗の供給側に装置している。この散布装置4は、苗載台3の底面に検出ローラ57を軸架して設け、上側から苗載台3に供給されるマット苗が、該ローラ57上を通過すると、マット苗によって前記検出ローラ57が回されて上側の散布ローラ56を伝動してタンク4a内の除草剤を散布する構成となっている。
【0059】
このように、図18に示す例は、電装品を使用せず、検出ローラ57がマット苗によって回されて、上側の散布ローラ56が伝動される構成であるから低コストで製作でき、苗の供給操作で散布ができる手数のかからない利点がある。
【符号の説明】
【0060】
1:機体、2:苗植付装置、3:苗載台、4:散布装置、4a:タンク、4b:繰出し部、5:散布口、9:苗移植機、16a:田植機体、50:補助苗枠、50a:メイン苗枠、50b:側部補助枠、50c:側枠、52:通過苗検出センサ、55:ガイドローラ、56:散布ロール
【特許請求の範囲】
【請求項1】
苗植付装置(2)と苗を供給する苗載台(3)とを機体(16a)に装備して設け、該苗載台(3)は、前記苗植付装置(2)に一株づつの苗を供給するために左右に往復移動する構成とし、予備苗を搭載する補助苗枠(50)を設け、補助苗枠(50)上を通過する予備苗に薬剤又は肥料等を散布する散布装置(4)を設け、該散布装置(4)は、薬剤又は肥料等を充填するタンク(4a)と、該タンク(4a)に充填している薬剤又は肥料等を繰り出す繰出し部(4b)と、該繰出し部(4b)から繰り出す薬剤又は肥料等を苗に散布する散布口(5)を備えた苗移植機。
【請求項2】
散布装置(4)は、予備苗が通過する位置に通過苗検出センサ(52)を設け、該通過苗検出センサ(52)が予備苗を検出すると自動的に散布口(5)から薬剤を散布する構成とした請求項1に記載の苗移植機。
【請求項3】
補助苗枠(50)を、メイン苗枠(50a)の端部に側部補助枠(50b)を接続し、該側部補助枠(50b)を折りたたみできる構成とし、側部補助枠(50b)に散布装置(4)を設けた請求項1又は請求項2に記載の苗移植機。
【請求項4】
補助苗枠(50)の側枠(50c)上を移動するガイドローラ(55)で散布装置(4)が移動する構成とし、ガイドローラ(55)の回転が散布ロール(56)ヘ伝動されて薬剤又は肥料等を繰り出す構成とした請求項1に記載の苗移植機。
【請求項1】
苗植付装置(2)と苗を供給する苗載台(3)とを機体(16a)に装備して設け、該苗載台(3)は、前記苗植付装置(2)に一株づつの苗を供給するために左右に往復移動する構成とし、予備苗を搭載する補助苗枠(50)を設け、補助苗枠(50)上を通過する予備苗に薬剤又は肥料等を散布する散布装置(4)を設け、該散布装置(4)は、薬剤又は肥料等を充填するタンク(4a)と、該タンク(4a)に充填している薬剤又は肥料等を繰り出す繰出し部(4b)と、該繰出し部(4b)から繰り出す薬剤又は肥料等を苗に散布する散布口(5)を備えた苗移植機。
【請求項2】
散布装置(4)は、予備苗が通過する位置に通過苗検出センサ(52)を設け、該通過苗検出センサ(52)が予備苗を検出すると自動的に散布口(5)から薬剤を散布する構成とした請求項1に記載の苗移植機。
【請求項3】
補助苗枠(50)を、メイン苗枠(50a)の端部に側部補助枠(50b)を接続し、該側部補助枠(50b)を折りたたみできる構成とし、側部補助枠(50b)に散布装置(4)を設けた請求項1又は請求項2に記載の苗移植機。
【請求項4】
補助苗枠(50)の側枠(50c)上を移動するガイドローラ(55)で散布装置(4)が移動する構成とし、ガイドローラ(55)の回転が散布ロール(56)ヘ伝動されて薬剤又は肥料等を繰り出す構成とした請求項1に記載の苗移植機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2011−78430(P2011−78430A)
【公開日】平成23年4月21日(2011.4.21)
【国際特許分類】
【出願番号】特願2010−280713(P2010−280713)
【出願日】平成22年12月16日(2010.12.16)
【分割の表示】特願2006−224341(P2006−224341)の分割
【原出願日】平成18年8月21日(2006.8.21)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
【公開日】平成23年4月21日(2011.4.21)
【国際特許分類】
【出願日】平成22年12月16日(2010.12.16)
【分割の表示】特願2006−224341(P2006−224341)の分割
【原出願日】平成18年8月21日(2006.8.21)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
[ Back to top ]