
苗移植機
【課題】マルチフィルムを堅実に切断すること。
【解決手段】一対の移植爪の先端部で苗の蔓状の茎部を挟持すると共に、両移植爪を進行方向側から後退方向側下方へ移動させて、マルチフィルムを張設した圃場中に茎部を挿入して移植する苗移植機であって、両移植爪よりも進行方向側においてマルチフィルムに向けて円板状の切断体を進退自在に配設すると共に、同切断体は周縁部を鋸歯状に形成して進行方向と略直交する軸線を中心にして転動自在とし、かつ、圃場の移植箇所に進出して突入することでマルチフィルムの抵抗力に抗して進行方向に転動しながら同マルチフィルムを部分的に切断するようにした。
【解決手段】一対の移植爪の先端部で苗の蔓状の茎部を挟持すると共に、両移植爪を進行方向側から後退方向側下方へ移動させて、マルチフィルムを張設した圃場中に茎部を挿入して移植する苗移植機であって、両移植爪よりも進行方向側においてマルチフィルムに向けて円板状の切断体を進退自在に配設すると共に、同切断体は周縁部を鋸歯状に形成して進行方向と略直交する軸線を中心にして転動自在とし、かつ、圃場の移植箇所に進出して突入することでマルチフィルムの抵抗力に抗して進行方向に転動しながら同マルチフィルムを部分的に切断するようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、甘藷苗等の蔓状苗を圃場に移植する甘藷挿苗機等の苗移植機に関する。
【背景技術】
【0002】
従来、苗移植機としての甘藷挿苗機に、蔓状の甘藷苗の茎部を一対の移植爪で挟持して圃場の畝中に茎部を挿入して甘藷苗を移植するものがある。すなわち、一対の移植爪は圃場の畝に対して間欠的に進退作動させるようにしている。各移植爪の先端部は板状に形成して両先端部の側面を対面させている。各先端部の先端は刃状に形成している。このようにして、一対の移植爪の先端部は進出作動の途中で甘藷苗の茎部を挟持し、同状態にて刃状の先端で畝の表面に張設しているいわゆるマルチフィルム(一般には薄いポリエチレンフィルム等)を突き破りながら畝中に突入して、甘藷苗を移植するようにしている。その後、一対の移植爪は茎部の挟持状態を解除して後退作動する。
【特許文献1】特開2004−113077号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところが、前記した甘藷挿苗機では一対の移植爪の先端部が甘藷苗の茎部を挟持した状態で前記マルチフィルムを突き破ることになる。そのために、甘藷苗の茎部は前記マルチフィルムに強く擦られて、損傷されるという課題がある。また、刃状の先端でマルチフィルムを突き破るために、マルチフィルムに形成される開口部は移植爪の先端部が貫通するだけの極く狭い範囲に限定されることになる。そのために、移植した甘藷苗に対する灌水が困難になるという課題もある。
【課題を解決するための手段】
【0004】
そこで、本発明では、一対の移植爪の先端部で苗の蔓状の茎部を挟持すると共に、両移植爪を進行方向側から後退方向側下方へ移動させて、マルチフィルムを張設した圃場中に茎部を挿入して移植する苗移植機であって、両移植爪よりも進行方向側においてマルチフィルムに向けて円板状の切断体を進退自在に配設すると共に、同切断体は周縁部を鋸歯状に形成して進行方向と略直交する軸線を中心にして転動自在とし、かつ、圃場の移植箇所に進出して突入することでマルチフィルムの抵抗力に抗して進行方向に転動しながら同マルチフィルムを部分的に切断するようにしたことを特徴とする苗移植機を提供するものである。
【0005】
また、本発明は以下の構成にも特徴を有する。
(1)前記切断体の近傍には規制体を配設すると共に、同規制体は切断体の圃場への突入を限界位置に規制する突入規制姿勢と、前記切断体と他物との干渉を規制する干渉規制姿勢との間で姿勢変更自在としたこと。
(2)規制体は進行方向に伸延するソリ状に形成して、切断体の転動中心となる転動軸の直進行方向側に規制体の一側端部を進行方向と略直交する軸線廻りに回動自在に枢支して配置すると共に、上記規制体は、突入規制姿勢では、前記マルチフィルムを介して圃場面から受ける反力により、略水平姿勢にて前記転動軸を下方から支持して切断体の圃場への突入を規制する姿勢を採る一方、干渉規制姿勢では、自重により切断体の下側周縁部に略沿った下り傾斜姿勢にて、切断体と他物との干渉を規制する姿勢を採るようにしたこと。
(3)移植爪を移植作動させるための動力を接続・切断する植付クラッチを機体に設けると共に、同植付クラッチの切断動作に切断体の強制的後退動作を連動させたこと。
(4)後退動作した切断体に対して干渉規制姿勢をとる規制体を固定して、干渉規制姿勢を保持することができるようにしたこと。
【発明の効果】
【0006】
(1)請求項1記載の本発明では、一対の移植爪の先端部で苗の蔓状の茎部を挟持すると共に、両移植爪を進行方向側から後退方向側下方へ移動させて、マルチフィルムを張設した圃場中に茎部を挿入して移植する苗移植機であって、両移植爪よりも進行方向側においてマルチフィルムに向けて円板状の切断体を進退自在に配設すると共に、同切断体は周縁部を鋸歯状に形成して進行方向と略直交する軸線を中心にして転動自在とし、かつ、圃場の移植箇所に進出して突入することでマルチフィルムの抵抗力に抗して進行方向に転動しながら同マルチフィルムを部分的に切断するようにしている。
【0007】
このように、周縁部を鋸歯状に形成した円板状の切断体をマルチフィルムの抵抗力に抗して進行方向に転動させることで、同マルチフィルムを堅実に切断することができる。しかも、切断する長さ(切断することで形成される開口部の大きさ)はマルチフィルム上を転動する切断体の回転数を増減することで適宜設定することができる。また、切断体の周縁部に形成している鋸歯状の歯部のピッチを成形可能な限り狭くすることで、切断跡の美観を高めることができると共に、切り残しなく堅実に切断することができる。また、ピッチを狭く形成することができない場合には、切断体の歯部が進行方向側に下り傾斜(いわゆる引き歯)となるように形成することで、転動する切断体の歯部がマルチフィルムに突入し易くなって、同マルチフィルムの切断性能を高めることができる。
【0008】
ここで、マルチフィルムは合成樹脂製のフィルムで一般には伸展性のある薄いポリエチレンフィルムである。そのため、単に移植爪等を突入させてもマルチフィルムに開口部を形成することはできるが、同開口部の大きさは突入させる移植爪等の断面積と略同一の大きさであり、それ以上に大きく開口させようとしてもマルチフィルムが伸びるだけで限界がある。そこで、本発明では前記したように周縁部を鋸歯状に形成した円板状の切断体をマルチフィルム上にて進行方向に転動させることで、かかる課題を解決した。
【0009】
(2)請求項2記載の本発明では、前記切断体の近傍には規制体を配設すると共に、同規制体は切断体の圃場への突入を限界位置に規制する突入規制姿勢と、前記切断体と他物との干渉を規制する干渉規制姿勢との間で姿勢変更自在としている。
【0010】
このように、規制体を突入規制姿勢と干渉規制姿勢とに姿勢変更自在とすると共に、突入規制姿勢を採る規制体によって、切断体を圃場に突入する限界位置にて規制することができるため、切断体が限界以上に圃場に潜り込むのを防止して、切断機能を良好に確保することができる。そのため、圃場面に凹凸がある場合でも切断体が圃場に潜り込むのを防止して、切断体の転動性を良好に確保することができる。その結果、切断体の切断機能を良好に確保することができて、移植作業効率を向上させることができる。ここで、切断体の圃場への突入限界位置としては、例えば、切断体の転動中心位置までとすることができる。転動中心位置以上に切断体が圃場に潜り込むと、切断体の転動が困難となるからである。
【0011】
また、干渉規制姿勢を採る規制体によって、切断体が他物と干渉するのを規制することができる。そのため、例えば、圃場に形成した一方通行の畝に苗を移植した後で、機体を後進させる必要性が生じた場合でも、切断体が既移植苗に干渉して既移植苗を損傷等させるのを規制体で防止することができる。
【0012】
(3)請求項3記載の本発明では、規制体は進行方向に伸延するソリ状に形成して、切断体の転動中心となる転動軸の直進行方向側に規制体の一側端部を進行方向と略直交する軸線廻りに回動自在に枢支して配置すると共に、上記規制体は、突入規制姿勢では、前記マルチフィルムを介して圃場面から受ける反力により、略水平姿勢にて前記転動軸を下方から支持して切断体の圃場への突入を規制する姿勢を採る一方、干渉規制姿勢では、自重により切断体の下側周縁部に略沿った下り傾斜姿勢にて、切断体と他物との干渉を規制する姿勢を採るようにしている。
【0013】
このように、進行方向に伸延するソリ状に形成した規制体を略水平姿勢の突入規制姿勢となすことで、切断体の転動軸を下方から支持する規制体によって、切断体が圃場に突入するのを規制することができる。この際、規制体の進行方向側をソリ状となすことで、規制体はマルチフィルム上を円滑に滑動して、同規制体がマルチフィルムに潜り込むのを防止することができる。また、規制体の進行方向側とは反対側(自由端側)をソリ状となすことで、同規制体の自由端側が下方に位置する傾斜姿勢でマルチフィルム上に当接した場合にも、規制体はマルチフィルム上を円滑に滑動しながら姿勢を略水平姿勢に整えるため、規制体は規制機能を良好に果たして、切断体による切断性能を良好に確保することができる。
【0014】
また、規制体を切断体の下側周縁部に略沿わせた下り傾斜姿勢の干渉規制姿勢となすことで、規制体によって切断体と他物との干渉を規制することができる。この際、規制体は切断体の下側周縁部に略沿わせてソリ状に形成することで、切断体と他物との干渉規制機能を高めることができる。
【0015】
(4)請求項4記載の本発明では、移植爪を移植作動させるための動力を接続・切断する植付クラッチを機体に設けると共に、同植付クラッチの切断動作に切断体の強制的後退動作を連動させている。
【0016】
このように、植付クラッチの切断動作と切断体の強制的後退動作を連動させているため、植付クラッチを切断動作させる度に切断体の後退動作が強制的になされる。そのため、植付クラッチを切断した直後に機体を移動させた場合でも、切断体が強制的に後退動作してマルチフィルムから堅実に離隔させることができるため、同切断体がマルチフィルムを損傷等するという不測の事態を回避することができる。
【0017】
(5)請求項5記載の本発明では、後退動作した切断体に対して干渉規制姿勢をとる規制体を固定して、干渉規制姿勢を保持することができるようにしている。
【0018】
このように、植付クラッチを切断動作させる度に切断体は強制的に後退動作されると共に、規制体は切断体と他物との干渉を規制する干渉規制姿勢を保持するため、機体の移動時(特に機体を圃場へ出入りさせる時)において切断体とマルチフィルムが接触して、同マルチフィルムを損傷等するという不具合を規制体により回避することができる。この際、規制体の干渉規制姿勢は保持されるため、同規制体による切断体の干渉規制機能を良好に確保することができる。
【図面の簡単な説明】
【0019】
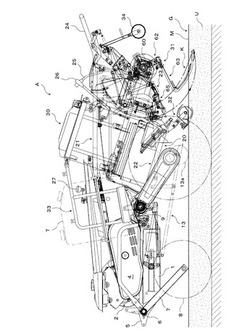
【図1】本発明に係る苗移植機の側面説明図。
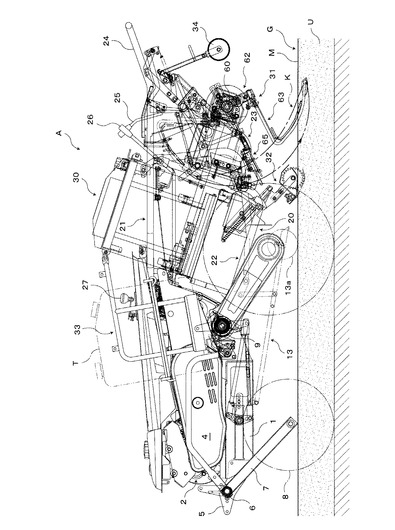
【図2】同苗移植機の平面説明図。
【図3】苗搬送部の断面側面説明図。
【図4】移植部の説明図。
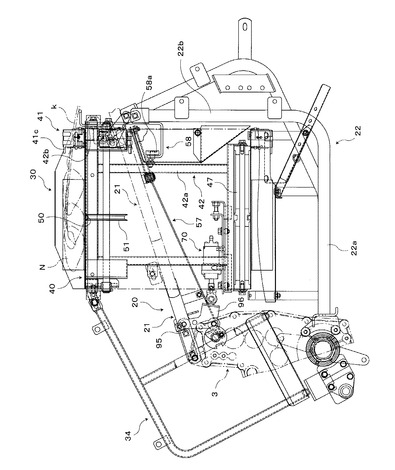
【図5】苗搬送部の一部切欠平面説明図。
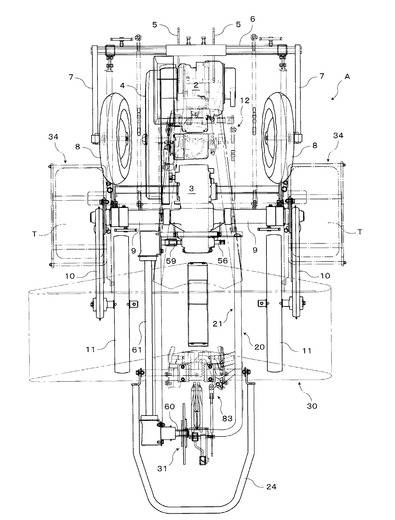
【図6】同苗搬送部の背面説明図。
【図7】切断体が後退したフィルム切断部の側面説明図。
【図8】切断体が進出したフィルム切断部の側面説明図。
【図9】切断体が進出したフィルム切断部の平面説明図。
【図10】移植部とフィルム切断部の動作説明図。
【図11】移植部とフィルム切断部の動作説明図。
【図12】移植部とフィルム切断部の動作説明図。
【図13】フィルム切断部の操作説明図。
【発明を実施するための形態】
【0020】
以下に、本発明の実施の形態を図面に基づいて説明する。
【0021】
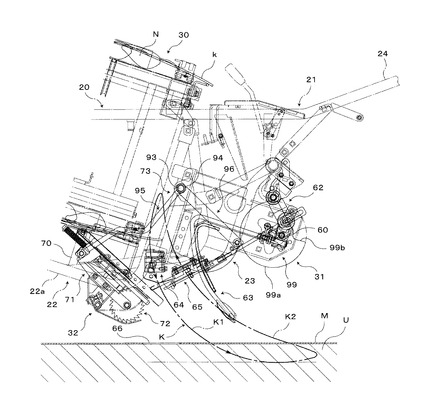
図1は本発明に係る苗移植機Aの側面説明図、図2は同苗移植機Aの平面説明図である。図1中、Gは圃場、Uは同圃場Gに形成した畝,Mは同畝Uの表面を被覆するように張設したマルチフィルムである。
【0022】
苗移植機Aは、図1及び図2に示すように、前後方向に伸延する平面視四角形枠状に形成した機体フレーム1の前部にエンジン2を搭載し、同機体フレーム1の後端部に上下縦長に形成したミッションケース3の下部を取り付けて、同ミッションケース3と上記エンジン2とを連動ケース4を介して連動連結している。機体フレーム1の直前方にはブラケット5を介して左右方向に伸延する前輪支持体6をその軸線廻りに揺動自在に取り付け、同前輪支持体6の左右側端部より後下方へ支持アーム7,7を垂設して、各支持アーム7,7の下端部に前輪8,8を転動自在に取り付けている。ミッションケース3の左右側下部には外側方へ伸延する軸ケース9,9の基端部を連動連設し、各軸ケース9,9の先端部に後下方へ伸延する伝動ケース10,10の上端部を各軸ケース9,9の軸線廻りに揺動自在に連動連設して、同伝動ケース10,10の下端部に後輪11,11を連動連結している。上記前輪支持体6と伝動ケース10,10は昇降機構12に連動連結して、機体を昇降自在としている。13は昇降センサ機構であり、同昇降センサ機構13に畝Uの上面を転動しながらセンシングするセンシングローラ13aを設け、同センシングローラ13aのセンシング結果に基づいて昇降機構12により機体を自動的に昇降させて、後述する苗の植え付け(移植)深さを略一定に保つことができるようにしている。
【0023】
そして、図3及び図4にも示すように、ミッションケース3の後部には立体枠状に形成した支持フレーム20を後方へ張り出し状に取り付けている。支持フレーム20は、ミッションケース3の後上部から後方へ伸延させて平面視U字状に形成した上部支持フレーム形成体21と、ミッションケース3の後下部から後方へ伸延させて後方伸延部22aを形成すると共に上方へ立ち上げて立ち上がり部22bを形成し、上端部を上部支持フレーム形成体21の中途部に連結した下部支持フレーム形成体22と、同下部支持フレーム形成体22の立ち上がり部22bに連結した補助フレーム形成体23とを具備している。上部支持フレーム形成体21は後部をハンドル24となしている。図1中、25は機体の昇降操作用レバーと植付クラッチの接続・切断操作用レバーを兼用する昇降兼植付レバー、26は走行変速レバー、27は株間調節ハンドルである。
【0024】
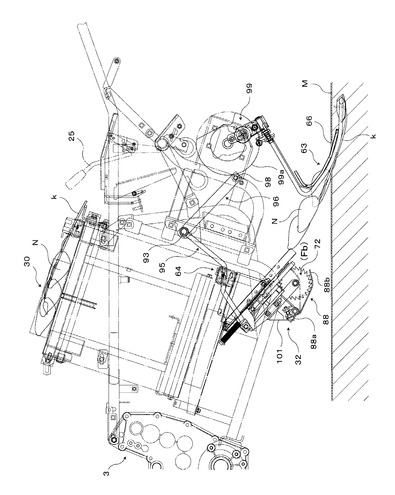
また、図3にも示すように、下部支持フレーム形成体22上には、甘藷苗等の蔓状の苗Nを搬送する苗搬送部30を配設し、同下部支持フレーム形成体22の直後方位置には、図4にも示すように、上記苗搬送部により搬送された苗Nを畝U中に移植する移植部31を配設して、同移植部31の直前方位置でかつ苗搬送部30の下方位置には、下部支持フレーム形成体22の後方伸延部22aを介してフィルム切断部32を配設している。図1及び図2中、33はミッションケース3の左右側方にそれぞれ配設したタンク支持フレーム、Tは各タンク支持フレーム33上に載置した灌水用の水タンクである。図1中、34は鎮圧ローラである。
【0025】
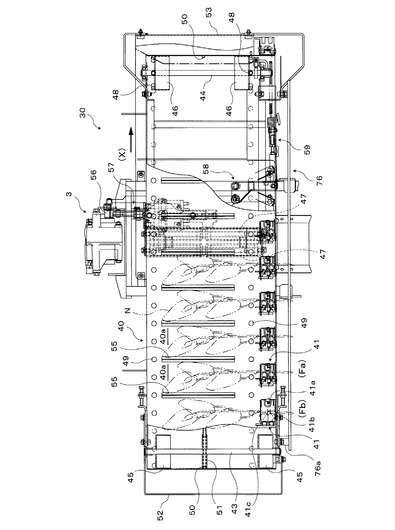
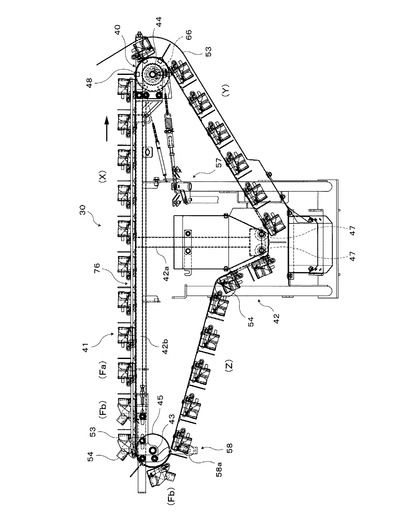
苗搬送部30は、図3,図5及び図6に示すように、無端帯状の搬送ベルト40の表面部上にかつ後端縁部に沿わせて、多数の苗ホルダー体41を搬送ベルト40の伸延方向に間隔を開けて取り付けて、搬送ベルト40を複数のローラを介して正面視ないしは背面視略逆三角形状に掛け廻すことで、上部の苗供給域Xと右側下部の苗搬送域Yと左側下部の苗ホルダー戻り域Zを形成している。
【0026】
すなわち、苗搬送部30は、図3,図5及び図6に示すように、下部支持フレーム形成体22の後方伸延部22aに前後一対の搬送部支持フレーム形成体42を連設している。そして、各搬送部支持フレーム形成体42は上下方向に伸延する上下方向伸延部42aと、同上下方向伸延部42aの上端部の中途部を連設して左右方向に伸延する左右方向伸延部42bとを具備している。前後に対向する左右方向伸延部42b,42bの左側端部と右側端部には、それぞれ前後方向に軸線を向けた左側上部ローラ支軸43と右側上部ローラ支軸44とを架設し、各上部ローラ支軸43,44の前後部にローラ45,45,46,46を前後に対向させて取り付けている。前後に対向する上下方向伸延部42a,42aの下部間には前後方向に軸線を向けた左右一対の下部ローラ47,47を近接させて配置している。このようにして、上記したローラ45〜47間に搬送ベルト40を掛け廻している。
【0027】
図5及び図6中、48は右側上部のローラ46の端面より放射方向に突設した係合ピンであり、同係合ピン48はローラ46の周方向に複数個を等間隔に配置している。49は搬送ベルト40の前後側縁部に形成した係合孔であり、同係合孔49は搬送ベルト40の伸延方向に一定の間隔を開けて形成すると共に、同係合孔49に上記係合ピン48が係合して、ローラ46の回動に連動して搬送ベルト40が移送されるようにしている。50は搬送ベルト40の内周面に突設した前後方向への位置ずれ防止用突条片、51は左側上部ローラ支軸43に取り付けた回転体であり、同回転体51の周端縁部に形成した凹条部に上記位置ずれ防止用突条片50を係合させて、搬送ベルト40の前後方向への位置ずれを防止している。52はガード体、53は苗ホルダー体41に保持されて搬送される苗搬送域Yの苗Nを下方から保護する保護体、54は左側の下部ローラ47よりも左側上方に配置して苗ホルダー戻り域Zの中途部を上方へ凸状に折曲させて案内するガイドローラである。
【0028】
図5及び図6に示すように、搬送ベルト40の上面には、多数の仕切り壁55を係合孔49一つ置きに整合させて配置している。そして、隣接する仕切り壁55,55間に位置する搬送ベルト40の部分を一本分の苗Nの載置部40aとして、各載置部40aの後端縁部に苗ホルダー体41を配設している。
【0029】
また、右側上部ローラ支軸44は、図5及び図6に示すように、ミッションケース3の右側上部から右側方へ突出させた第1駆動軸56に駆動機構57を介して連動連結して、同駆動機構57により右側上部ローラ支軸44を介してローラ46,46を間欠的に同一方向(本実施形態では図6の背面視で時計廻り)にのみ回動させることで、搬送ベルト40を所定のピッチ毎(本実施形態では係合孔49の間隔を一ピッチとして二ピッチ毎)に搬送させるようにしている。
【0030】
苗ホルダー体41は、固定側ホルダー形成片41aと可動側ホルダー形成片41bとを具備すると共に、同可動側ホルダー形成片41bは、固定側ホルダー形成片41aに近接して苗Nの茎部kを挟持する挟持姿勢と、固定側ホルダー形成片41aから離隔して待機する待機姿勢との間で姿勢変更自在としている。そして、前記苗ホルダー戻り域Zの終端部近傍に、可動側ホルダー形成片41bを挟持姿勢から待機姿勢に姿勢を変更する姿勢変更体58を配置している。
【0031】
姿勢変更体58は、図3及び図6に示すように、可動側ホルダー形成片41bに設けた被作用片41cに作用する作用片58aを具備している。被作用片41cは可動側ホルダー形成片41bから外側方へ棒状に突設する一方、作用片58aは転動自在の作用ローラとなして、同作用ローラの周面が被作用片41cに作用するようにしている。
【0032】
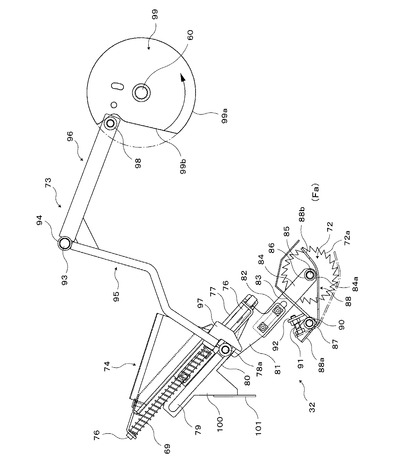
移植部31は、図4に示すように、前記補助フレーム形成体23に植付回転軸60を左右方向に軸線を向けて軸支し、ミッションケース3から左側外方へ突出させた第2駆動軸59(図示2参照)に伝動軸ケース61(図1及び図2参照)を介して上記植付回転軸60の左側端部を連動連結している。一方、植付回転軸60の右側端部には植付駆動機構62を介して左右一対の移植爪63,63を連動連結して、両移植爪63,63の先端部が円弧状の往路軌跡K1と円弧状の復路軌跡K2とからなる移植軌跡Kを描いて往復作動するように構成している。そして、往路軌跡K1の始端部側に強制挟持作用体64を配設して、同強制挟持作用体64で左右一対の移植爪63,63の先端部を強制的に挟持作動させるようにしている。この際、左右一対の下部ローラ47,47の直後下方まで搬送された苗ホルダー体41が挟持している苗Nの茎部kを、強制挟持作用体64を介して左右一対の移植爪63,63の先端部が堅実に挟持して、苗ホルダー体41から苗Nを引き取る。そして、往路軌跡K1の終端部である畝U中に苗Nの茎部kを挿入して移植する。その後、左右一対の移植爪63,63の先端部同士は離隔動作して、茎部kの挟持状態を解除すると共に、復路軌跡K2を描いて元の始動位置に復帰する。そして、復路軌跡K2の中途部にスクレーパー体65を配設して、同スクレーパー体65中に左右一対の移植爪63,63の先端部を通過させることで、両移植爪63,63の先端部の内外側面に付着した泥土を掻き落とすようにしている。
【0033】
フィルム切断部32は、図4に示すように、前記移植部31により畝Uに苗Nを移植する直前に、移植箇所となるマルチフィルムMの部分を部分的に切断して開口部66を形成し、同開口部66中を通して畝Uに苗Nを移植するようにしている。
【0034】
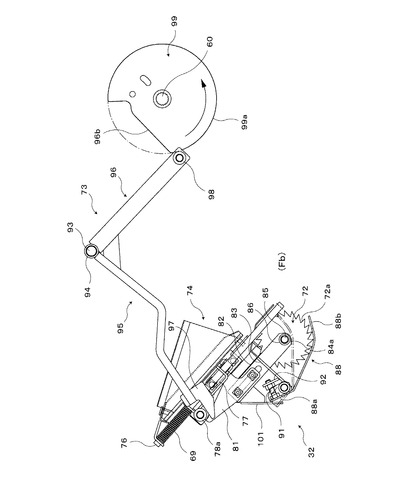
すなわち、フィルム切断部32は、図4に示すように、下部支持フレーム形成体22の後方伸延部22aに取付ブラケット70を介して切断部本体71を取り付け、同切断部本体71に前記移植爪63,63よりも進行方向側である前方においてマルチフィルムMに向けて円板状の切断体72を進退自在に配設し、同切断体72を作動体73により進退作動させるようにしている。
【0035】
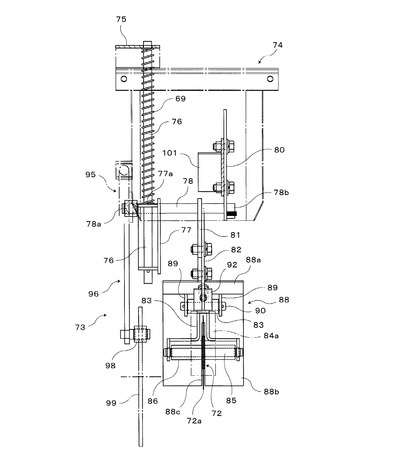
切断部本体71は、図7〜図9に示すように、取付ブラケット70にカバー体74の前端縁部を取り付け、同カバー体74の左側前端縁部に取り付けたロッド支持片75に前後方向に伸延するガイドロッド76の前端部を取り付けて、同ガイドロッド76を後下方へ向けて配置している。ガイドロッド76の中途部にはスライダー77をガイドロッド76の軸線方向にスライド自在に取り付け、同スライダー77の前端部77aと上記ロッド支持片75との間に弾性体としての押圧スプリング69をガイドロッド76の外周面に巻回して介設している。
【0036】
そして、図7〜図9に示すように、スライダー77の下面には左右方向に伸延するスライドピン78の左側端部78aを左側方へ突出状に固設している。上記カバー体74の右側下面には前後方向に伸延するガイド用長孔79を有するガイド片80を垂設し、同ガイド用長孔79にスライドピン78の右側端部78bを挿通して、同右側端部78bをガイド用長孔79に沿わせて前後方向に摺動自在となしている。
【0037】
また、図7〜図9に示すように、スライドピン78の中途部には、前部支持片81の前端部を取り付け、同前部支持片81の後部に後部支持片82の前部を前後方向にスライド位置調節自在に連結して、同後部支持片82の後端部に直交状態に支持壁片83の上面を固設している。支持壁片83の下面には左右一対の軸支持ブラケット84,84の上端部を取り付け、同軸支持ブラケット84,84の下端部間に左右方向に軸線を向けて切断体支軸85を架設している。切断体支軸85には転動軸としての筒状体86を回転自在に嵌合し、同筒状体86の中途部に切断体72の中央部を貫通状態にかつ一体的に取り付けている。
【0038】
切断体72は、図7〜図9に示すように、周縁部に鋸歯状の歯部72aを形成して進行方向と略直交する軸線を中心にして転動自在とし、かつ、圃場の移植箇所に進出して突入することでマルチフィルムMの抵抗力に抗して進行方向に転動しながら同マルチフィルムMを部分的に切断するようにしている。
【0039】
このように、周縁部を鋸歯状に形成した円板状の切断体72をマルチフィルムMの抵抗力に抗して進行方向に転動させることで、同マルチフィルムMを堅実に切断することができる。ここで、切断する長さ(切断することで形成される開口部66の大きさ)はマルチフィルムM上を転動する切断体72の回転数を増減することで適宜設定することができる。また、切断体72の周縁部に形成している鋸歯状の歯部72aのピッチを成形可能な限り狭くすることで、切断跡の美観を高めることができると共に、切り残しなく堅実に切断することができる。また、ピッチを狭く形成することができない場合には、本実施形態のように、切断体72の歯部72aが進行方向側に下り傾斜(いわゆる引き歯)となるように形成することで、転動する切断体72の歯部72aがマルチフィルムMに突入し易くなって、同マルチフィルムMの切断性能を高めることができる。
【0040】
支持壁片83の前端部には、図7〜図9に示すように、左右方向に軸線を向けた筒状枢支片87を固設している。進行方向である前後方向に伸延するソリ状に形成した規制体88の上面前部に、左右一対の連結片89,89を設けると共に、両連結片89,89を上記筒状枢支片87の両端部に配置して、両連結片89,89に筒状枢支片87中を通して枢支ピン90を貫通させて、規制体88の前部を回動自在に枢支している。規制体88の前端縁部には上方へソリ返し状に延設して受け片88aを形成している。一方、規制体88の後端部には上方へソリ返し状に延設してソリ状部88bを形成している。規制体88の左右幅の中央部には後端から前部にかけて伸延する切欠状溝部88cを形成して、切欠状溝部88cにより切断体72との干渉を回避している。91は支持壁片83の上面にブラケット92を介して前下方へ突出状に取り付けたストッパー片である。
【0041】
そして、規制体88は、図7及び図8に示すように、前記切断体72の近傍に配設すると共に、同規制体88は切断体72の圃場Gへの突入を限界位置に規制する突入規制姿勢(Fa)と、前記切断体72と他物との干渉を規制する干渉規制姿勢(Fb)との間で姿勢変更自在としている。
【0042】
しかも、図8に示す突入規制姿勢(Fa)では、前記マルチフィルムMを介して圃場G面から受ける反力により、規制体88は略水平姿勢にて前記軸支持ブラケット84,84の下端部84a,84aに下方から当接することで筒状体86を下方から支持して、切断体72の圃場Gへの突入を規制する姿勢を採るようにしている。この際、切断体72は規制体88の切欠状溝部88c中に配置される(図10参照)。
【0043】
また、図7に示す干渉規制姿勢(Fb)では、規制体88の自重により切断体72の下側周縁部に略沿った下り傾斜姿勢にて、切断体72と他物との干渉を規制する姿勢を採るようにしている。この際、干渉規制姿勢(Fb)では、規制体88の前端縁部から上方へ延設して形成した受け片88aがストッパー片91に当接することで、規制体88が図7の側面視で時計廻りに回動して切断体72から離隔するのを規制している。
【0044】
このように、規制体88を突入規制姿勢(Fa)と干渉規制姿勢(Fb)とに姿勢変更自在とすると共に、突入規制姿勢(Fa)を採る規制体88によって、切断体72を畝U中に突入する限界位置にて規制することができるため、図11に示すように、切断体72が限界以上に畝U中に潜り込むのを防止して、切断機能を良好に確保することができる。そのため、畝N面に凹凸がある場合でも切断体72が畝U中に潜り込むのを防止して、切断体72の転動性を良好に確保することができる。その結果、切断体72の切断機能を良好に確保することができて、移植作業効率を向上させることができる。ここで、切断体72の畝U中への突入限界位置としては、例えば、切断体72の転動中心位置(切断体支軸85の軸芯位置)までとすることができる。転動中心位置以上に切断体72が畝U中に潜り込むと、切断体72の転動が困難となるからである。
【0045】
また、干渉規制姿勢(Fb)を採る規制体88によって、切断体72が他物と干渉するのを規制することができる。そのため、図10及び図12に示すように、例えば、圃場Gに形成した一方通行の畝Uに苗Nを移植した後で、機体を後進させる必要性が生じた場合でも、切断体72が既移植苗Nに干渉して既移植苗Nを損傷等させるのを規制体88で防止することができる。
【0046】
また、図11に示すように、進行方向に伸延するソリ状に形成した規制体88を略水平姿勢の突入規制姿勢(Fa)となすことで、切断体72の転動軸としての筒状体86を下方から支持する規制体88によって、切断体72が畝U中に突入するのを規制することができる。この際、規制体88の進行方向側(前端縁部側)をソリ状となすことで、規制体88はマルチフィルムM上を円滑に滑動して、同規制体88がマルチフィルムMに潜り込むのを防止することができる。また、規制体88の進行方向側とは反対側(自由端側である後端縁部側)をソリ状となすことで、同規制体88の自由端側が下方に位置する傾斜姿勢でマルチフィルムM上に当接した場合にも、規制体88はマルチフィルムM上を円滑に滑動しながら姿勢を略水平姿勢に整えるため、規制体88は規制機能を良好に果たして、切断体72による切断性能を良好に確保することができる。
【0047】
また、図10及び図12に示すように、規制体88を切断体72の下側周縁部に略沿わせた下り傾斜姿勢の干渉規制姿勢(Fb)となすことで、規制体88によって切断体72と他物との干渉を規制することができる。この際、規制体88は切断体72の下側周縁部に略沿わせてソリ状に形成することで、切断体72と他物との干渉規制機能を高めることができる。
【0048】
作動体73は、図4に示すように、補助フレーム形成体23の前上部に左右方向に軸線を向けた枢軸93を取り付け、同枢軸93にボス部94を回転自在に嵌合して、ボス部94の周面に係合アーム95とカムフォロアーアーム96の各基端を、ボス部94の周方向に略90度変位させて取り付けて形成している。
【0049】
そして、図7〜図9に示すように、係合アーム95の先端部には係合片97を取り付けて、同係合片97が前記スライドピン78の左側端部78aに下方から係合するようにしている。また、カムフォロアーアーム96の先端部にはカムフォロアーとしての転動ローラ98を転動自在に取り付けて、同転動ローラ98が後述する回転カム99の外周面に当接するようにしている。回転カム99は、外周面に円弧状カム面99aと切り欠き状カム面99bとを形成しており、前記した移植部31の植付回転軸60の中途部に取り付けて、同植付回転軸60と一体的に回転するようにしている。
【0050】
このようにして、係合アーム95の先端部に取り付けた係合片97が、押圧スプリング69により畝U側に進出する方向に弾性付勢されているスライドピン78の左側端部78aに下方から係合しているため、係合アーム95とカムフォロアーアーム96は図7において反時計廻りの回動方向に弾性付勢されて、同フォロアーアーム96の先端部に取り付けた転動ローラ98が回転カム99の外周面に押圧状態に接触(当接)するようにしている。
【0051】
そして、図7に示すように、反時計廻りに回転する回転カム99の円弧状カム面99aに転動ローラ98が当接している状態では、フォロアーアーム96と係合アーム95が一体的に時計廻りに回動されて、係合片97が押圧スプリング69の弾性付勢力に抗してスライドピン78を介して切断体72を畝Uから離隔する前上方へ後退させるようにしている。しかも、最大限後退位置(ガイド用長孔79の上端縁にスライドピン78の周面が当接する位置)では、規制体88が強制的に干渉規制姿勢(Fb)に姿勢変更されるようにしている。
【0052】
ここで、ガイド片80の下端縁中途部には、図7に示すように、下方へ伸延させて伸延片100を形成し、同伸延片100の下端縁部に四角形板状の姿勢変更体101を鉛直下方へ垂設している。そして、最大限後退位置まで前上方へ向けて後退される規制体88の受け片88aの上端縁部が、姿勢変更体101の後面に当接すると共に上方へ摺動して、受け片88aと規制体88が一体に枢支ピン90を中心にして時計廻りに回動され、受け片88aがストッパー片91に当接したところでいずれの方向への回動も規制される。すなわち、受け片88aを介して規制体88が固定されることになって、同規制体88は強制的に干渉規制姿勢(Fb)に保持される。
【0053】
また、図8に示すように、回転カム99の切り欠き状カム面99bに転動ローラ98が当接している状態では、フォロアーアーム96に対する時計廻りへの回動付与力が解除されて、係合片97が押圧スプリング69の弾性付勢力によりスライドピン78を介して切断体72を畝U側である後下方へ進出させるようにしている。
【0054】
上記した切断体72の進退動作は、図10〜図12に示すように、移植爪63,63の先端部の移植軌跡Kを描いく往復動作と連動させて、切断体72によりマルチフィルムMを一部切断して形成した開口部66を通して畝Uに移植爪63,63で挟持した苗Nの茎部kを挿入するようにしている。
【0055】
すなわち、図10に示すように、移植爪63,63の先端部が復路軌跡K2の中途部に位置している際には、反時計廻りに回転する回転カム99の円弧状カム面99aの終端部に転動ローラ98が当接している。この際、切断体72は最大限後退位置で待機している。
【0056】
図11に示すように、移植爪63,63の先端部が最上昇位置まで移動した際には、反時計廻りに回転する回転カム99の切り欠き状カム面99bの終端部に転動ローラ98が当接している。この際、切断体72は畝U側に進出作動して、切断体72がマルチフィルムMを一部切断して開口部66を形成する。規制体88はマルチフィルムM上にて突入規制姿勢(Fa)を採り、切断体72の畝U中への突入を規制する。
【0057】
図12に示すように、左右一対の移植爪63,63の先端部が苗Nの茎部kを挟持して、往路軌跡K1の終端部である畝U中に上記開口部66を通して苗Nの茎部kを挿入して移植する際には、反時計廻りに回転する回転カム99の円弧状カム面99aの中途部に転動ローラ98が当接している。この際、切断体72は最大限後退位置まで後退される。
【0058】
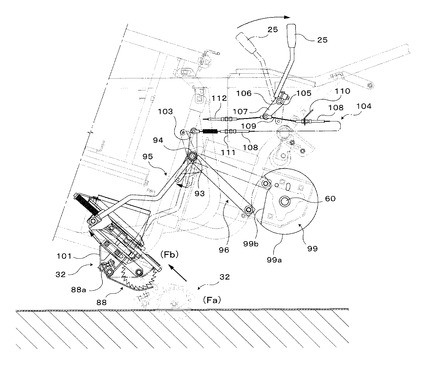
また、左右一対の移植爪63,63を移植作動させるための動力を接続・切断する植付クラッチ(図示せず)を機体に設けると共に、同植付クラッチの切断動作に切断体の強制的後退動作を連動させている。本実施形態では、図13に示すように、前記したボス部94の上部周面に受動アーム103を上方へ向けて突設し、同受動アーム103の上端部を前記した昇降兼植付レバー25に連動ワイヤ104を介して連動連結している。
【0059】
すなわち、図13に示すように、ハンドル24に軸線を左右方向に向けたレバー支軸105を取り付け、同レバー支軸105にボス部106を介して昇降兼植付レバー25の基端部を枢支すると共に、同基端部には作動アーム107を下方へ向けて垂設して、同作動アーム107の下端部と上記受動アーム103の上端部との間に連動ワイヤ104を介設している。108は連動ワイヤ104のアウターワイヤ、109は連動ワイヤのインナーワイヤ、110,111はアウターワイヤ受け片である。112は作動アーム107の下端部に基端部を連結した植付クラッチ連動ワイヤであり、同植付クラッチ連動ワイヤ112はミッションケース3内に設けた植付クラッチ(図示せず)に先端部を連結している。
【0060】
このようにして、図13に示すように、昇降兼植付レバー25を後方へ傾動操作することで、植付クラッチ連動ワイヤ112を介して植付クラッチが切断作動されると共に、連動ワイヤ104を介して受動アーム103が時計廻りに回動されて、作動体73の係合アーム95も時計廻りに回動されるようにしている。そして、切断体72が強制的に最大限後退位置まで前上方へ向けて後退されると共に、規制体88が強制的に干渉規制姿勢(Fb)に保持されるようにしている。
【0061】
このように、植付クラッチの切断操作による切断動作と切断体72の強制的後退動作を連動させているため、植付クラッチを切断動作させる度に切断体72の後退動作が強制的に、すなわち、回転カム99の回転位置にかかわりなくなされる。そのため、植付クラッチを切断した直後に機体を移動させた場合でも、切断体72が強制的に後退動作してマルチフィルムMから堅実に離隔させることができるため、同切断体72がマルチフィルムMを損傷等するという不測の事態を回避することができる。
【0062】
しかも、植付クラッチを切断動作させる度に切断体72は強制的に後退動作されると共に、規制体88は切断体72と他物との干渉を規制する干渉規制姿勢(Fb)を保持するため、機体の移動時(特に機体を圃場へ出入りさせる時)において切断体72とマルチフィルムMが接触して、同マルチフィルムMを損傷等するという不具合を規制体88により回避することができる。この際、規制体88の干渉規制姿勢(Fb)は保持されるため、同規制体88による切断体72の干渉規制機能を良好に確保することができる。
【符号の説明】
【0063】
A 苗移植機
30 苗搬送部
31 移植部
32 フィルム切断部
72 切断体
88 規制体
【技術分野】
【0001】
本発明は、甘藷苗等の蔓状苗を圃場に移植する甘藷挿苗機等の苗移植機に関する。
【背景技術】
【0002】
従来、苗移植機としての甘藷挿苗機に、蔓状の甘藷苗の茎部を一対の移植爪で挟持して圃場の畝中に茎部を挿入して甘藷苗を移植するものがある。すなわち、一対の移植爪は圃場の畝に対して間欠的に進退作動させるようにしている。各移植爪の先端部は板状に形成して両先端部の側面を対面させている。各先端部の先端は刃状に形成している。このようにして、一対の移植爪の先端部は進出作動の途中で甘藷苗の茎部を挟持し、同状態にて刃状の先端で畝の表面に張設しているいわゆるマルチフィルム(一般には薄いポリエチレンフィルム等)を突き破りながら畝中に突入して、甘藷苗を移植するようにしている。その後、一対の移植爪は茎部の挟持状態を解除して後退作動する。
【特許文献1】特開2004−113077号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところが、前記した甘藷挿苗機では一対の移植爪の先端部が甘藷苗の茎部を挟持した状態で前記マルチフィルムを突き破ることになる。そのために、甘藷苗の茎部は前記マルチフィルムに強く擦られて、損傷されるという課題がある。また、刃状の先端でマルチフィルムを突き破るために、マルチフィルムに形成される開口部は移植爪の先端部が貫通するだけの極く狭い範囲に限定されることになる。そのために、移植した甘藷苗に対する灌水が困難になるという課題もある。
【課題を解決するための手段】
【0004】
そこで、本発明では、一対の移植爪の先端部で苗の蔓状の茎部を挟持すると共に、両移植爪を進行方向側から後退方向側下方へ移動させて、マルチフィルムを張設した圃場中に茎部を挿入して移植する苗移植機であって、両移植爪よりも進行方向側においてマルチフィルムに向けて円板状の切断体を進退自在に配設すると共に、同切断体は周縁部を鋸歯状に形成して進行方向と略直交する軸線を中心にして転動自在とし、かつ、圃場の移植箇所に進出して突入することでマルチフィルムの抵抗力に抗して進行方向に転動しながら同マルチフィルムを部分的に切断するようにしたことを特徴とする苗移植機を提供するものである。
【0005】
また、本発明は以下の構成にも特徴を有する。
(1)前記切断体の近傍には規制体を配設すると共に、同規制体は切断体の圃場への突入を限界位置に規制する突入規制姿勢と、前記切断体と他物との干渉を規制する干渉規制姿勢との間で姿勢変更自在としたこと。
(2)規制体は進行方向に伸延するソリ状に形成して、切断体の転動中心となる転動軸の直進行方向側に規制体の一側端部を進行方向と略直交する軸線廻りに回動自在に枢支して配置すると共に、上記規制体は、突入規制姿勢では、前記マルチフィルムを介して圃場面から受ける反力により、略水平姿勢にて前記転動軸を下方から支持して切断体の圃場への突入を規制する姿勢を採る一方、干渉規制姿勢では、自重により切断体の下側周縁部に略沿った下り傾斜姿勢にて、切断体と他物との干渉を規制する姿勢を採るようにしたこと。
(3)移植爪を移植作動させるための動力を接続・切断する植付クラッチを機体に設けると共に、同植付クラッチの切断動作に切断体の強制的後退動作を連動させたこと。
(4)後退動作した切断体に対して干渉規制姿勢をとる規制体を固定して、干渉規制姿勢を保持することができるようにしたこと。
【発明の効果】
【0006】
(1)請求項1記載の本発明では、一対の移植爪の先端部で苗の蔓状の茎部を挟持すると共に、両移植爪を進行方向側から後退方向側下方へ移動させて、マルチフィルムを張設した圃場中に茎部を挿入して移植する苗移植機であって、両移植爪よりも進行方向側においてマルチフィルムに向けて円板状の切断体を進退自在に配設すると共に、同切断体は周縁部を鋸歯状に形成して進行方向と略直交する軸線を中心にして転動自在とし、かつ、圃場の移植箇所に進出して突入することでマルチフィルムの抵抗力に抗して進行方向に転動しながら同マルチフィルムを部分的に切断するようにしている。
【0007】
このように、周縁部を鋸歯状に形成した円板状の切断体をマルチフィルムの抵抗力に抗して進行方向に転動させることで、同マルチフィルムを堅実に切断することができる。しかも、切断する長さ(切断することで形成される開口部の大きさ)はマルチフィルム上を転動する切断体の回転数を増減することで適宜設定することができる。また、切断体の周縁部に形成している鋸歯状の歯部のピッチを成形可能な限り狭くすることで、切断跡の美観を高めることができると共に、切り残しなく堅実に切断することができる。また、ピッチを狭く形成することができない場合には、切断体の歯部が進行方向側に下り傾斜(いわゆる引き歯)となるように形成することで、転動する切断体の歯部がマルチフィルムに突入し易くなって、同マルチフィルムの切断性能を高めることができる。
【0008】
ここで、マルチフィルムは合成樹脂製のフィルムで一般には伸展性のある薄いポリエチレンフィルムである。そのため、単に移植爪等を突入させてもマルチフィルムに開口部を形成することはできるが、同開口部の大きさは突入させる移植爪等の断面積と略同一の大きさであり、それ以上に大きく開口させようとしてもマルチフィルムが伸びるだけで限界がある。そこで、本発明では前記したように周縁部を鋸歯状に形成した円板状の切断体をマルチフィルム上にて進行方向に転動させることで、かかる課題を解決した。
【0009】
(2)請求項2記載の本発明では、前記切断体の近傍には規制体を配設すると共に、同規制体は切断体の圃場への突入を限界位置に規制する突入規制姿勢と、前記切断体と他物との干渉を規制する干渉規制姿勢との間で姿勢変更自在としている。
【0010】
このように、規制体を突入規制姿勢と干渉規制姿勢とに姿勢変更自在とすると共に、突入規制姿勢を採る規制体によって、切断体を圃場に突入する限界位置にて規制することができるため、切断体が限界以上に圃場に潜り込むのを防止して、切断機能を良好に確保することができる。そのため、圃場面に凹凸がある場合でも切断体が圃場に潜り込むのを防止して、切断体の転動性を良好に確保することができる。その結果、切断体の切断機能を良好に確保することができて、移植作業効率を向上させることができる。ここで、切断体の圃場への突入限界位置としては、例えば、切断体の転動中心位置までとすることができる。転動中心位置以上に切断体が圃場に潜り込むと、切断体の転動が困難となるからである。
【0011】
また、干渉規制姿勢を採る規制体によって、切断体が他物と干渉するのを規制することができる。そのため、例えば、圃場に形成した一方通行の畝に苗を移植した後で、機体を後進させる必要性が生じた場合でも、切断体が既移植苗に干渉して既移植苗を損傷等させるのを規制体で防止することができる。
【0012】
(3)請求項3記載の本発明では、規制体は進行方向に伸延するソリ状に形成して、切断体の転動中心となる転動軸の直進行方向側に規制体の一側端部を進行方向と略直交する軸線廻りに回動自在に枢支して配置すると共に、上記規制体は、突入規制姿勢では、前記マルチフィルムを介して圃場面から受ける反力により、略水平姿勢にて前記転動軸を下方から支持して切断体の圃場への突入を規制する姿勢を採る一方、干渉規制姿勢では、自重により切断体の下側周縁部に略沿った下り傾斜姿勢にて、切断体と他物との干渉を規制する姿勢を採るようにしている。
【0013】
このように、進行方向に伸延するソリ状に形成した規制体を略水平姿勢の突入規制姿勢となすことで、切断体の転動軸を下方から支持する規制体によって、切断体が圃場に突入するのを規制することができる。この際、規制体の進行方向側をソリ状となすことで、規制体はマルチフィルム上を円滑に滑動して、同規制体がマルチフィルムに潜り込むのを防止することができる。また、規制体の進行方向側とは反対側(自由端側)をソリ状となすことで、同規制体の自由端側が下方に位置する傾斜姿勢でマルチフィルム上に当接した場合にも、規制体はマルチフィルム上を円滑に滑動しながら姿勢を略水平姿勢に整えるため、規制体は規制機能を良好に果たして、切断体による切断性能を良好に確保することができる。
【0014】
また、規制体を切断体の下側周縁部に略沿わせた下り傾斜姿勢の干渉規制姿勢となすことで、規制体によって切断体と他物との干渉を規制することができる。この際、規制体は切断体の下側周縁部に略沿わせてソリ状に形成することで、切断体と他物との干渉規制機能を高めることができる。
【0015】
(4)請求項4記載の本発明では、移植爪を移植作動させるための動力を接続・切断する植付クラッチを機体に設けると共に、同植付クラッチの切断動作に切断体の強制的後退動作を連動させている。
【0016】
このように、植付クラッチの切断動作と切断体の強制的後退動作を連動させているため、植付クラッチを切断動作させる度に切断体の後退動作が強制的になされる。そのため、植付クラッチを切断した直後に機体を移動させた場合でも、切断体が強制的に後退動作してマルチフィルムから堅実に離隔させることができるため、同切断体がマルチフィルムを損傷等するという不測の事態を回避することができる。
【0017】
(5)請求項5記載の本発明では、後退動作した切断体に対して干渉規制姿勢をとる規制体を固定して、干渉規制姿勢を保持することができるようにしている。
【0018】
このように、植付クラッチを切断動作させる度に切断体は強制的に後退動作されると共に、規制体は切断体と他物との干渉を規制する干渉規制姿勢を保持するため、機体の移動時(特に機体を圃場へ出入りさせる時)において切断体とマルチフィルムが接触して、同マルチフィルムを損傷等するという不具合を規制体により回避することができる。この際、規制体の干渉規制姿勢は保持されるため、同規制体による切断体の干渉規制機能を良好に確保することができる。
【図面の簡単な説明】
【0019】
【図1】本発明に係る苗移植機の側面説明図。
【図2】同苗移植機の平面説明図。
【図3】苗搬送部の断面側面説明図。
【図4】移植部の説明図。
【図5】苗搬送部の一部切欠平面説明図。
【図6】同苗搬送部の背面説明図。
【図7】切断体が後退したフィルム切断部の側面説明図。
【図8】切断体が進出したフィルム切断部の側面説明図。
【図9】切断体が進出したフィルム切断部の平面説明図。
【図10】移植部とフィルム切断部の動作説明図。
【図11】移植部とフィルム切断部の動作説明図。
【図12】移植部とフィルム切断部の動作説明図。
【図13】フィルム切断部の操作説明図。
【発明を実施するための形態】
【0020】
以下に、本発明の実施の形態を図面に基づいて説明する。
【0021】
図1は本発明に係る苗移植機Aの側面説明図、図2は同苗移植機Aの平面説明図である。図1中、Gは圃場、Uは同圃場Gに形成した畝,Mは同畝Uの表面を被覆するように張設したマルチフィルムである。
【0022】
苗移植機Aは、図1及び図2に示すように、前後方向に伸延する平面視四角形枠状に形成した機体フレーム1の前部にエンジン2を搭載し、同機体フレーム1の後端部に上下縦長に形成したミッションケース3の下部を取り付けて、同ミッションケース3と上記エンジン2とを連動ケース4を介して連動連結している。機体フレーム1の直前方にはブラケット5を介して左右方向に伸延する前輪支持体6をその軸線廻りに揺動自在に取り付け、同前輪支持体6の左右側端部より後下方へ支持アーム7,7を垂設して、各支持アーム7,7の下端部に前輪8,8を転動自在に取り付けている。ミッションケース3の左右側下部には外側方へ伸延する軸ケース9,9の基端部を連動連設し、各軸ケース9,9の先端部に後下方へ伸延する伝動ケース10,10の上端部を各軸ケース9,9の軸線廻りに揺動自在に連動連設して、同伝動ケース10,10の下端部に後輪11,11を連動連結している。上記前輪支持体6と伝動ケース10,10は昇降機構12に連動連結して、機体を昇降自在としている。13は昇降センサ機構であり、同昇降センサ機構13に畝Uの上面を転動しながらセンシングするセンシングローラ13aを設け、同センシングローラ13aのセンシング結果に基づいて昇降機構12により機体を自動的に昇降させて、後述する苗の植え付け(移植)深さを略一定に保つことができるようにしている。
【0023】
そして、図3及び図4にも示すように、ミッションケース3の後部には立体枠状に形成した支持フレーム20を後方へ張り出し状に取り付けている。支持フレーム20は、ミッションケース3の後上部から後方へ伸延させて平面視U字状に形成した上部支持フレーム形成体21と、ミッションケース3の後下部から後方へ伸延させて後方伸延部22aを形成すると共に上方へ立ち上げて立ち上がり部22bを形成し、上端部を上部支持フレーム形成体21の中途部に連結した下部支持フレーム形成体22と、同下部支持フレーム形成体22の立ち上がり部22bに連結した補助フレーム形成体23とを具備している。上部支持フレーム形成体21は後部をハンドル24となしている。図1中、25は機体の昇降操作用レバーと植付クラッチの接続・切断操作用レバーを兼用する昇降兼植付レバー、26は走行変速レバー、27は株間調節ハンドルである。
【0024】
また、図3にも示すように、下部支持フレーム形成体22上には、甘藷苗等の蔓状の苗Nを搬送する苗搬送部30を配設し、同下部支持フレーム形成体22の直後方位置には、図4にも示すように、上記苗搬送部により搬送された苗Nを畝U中に移植する移植部31を配設して、同移植部31の直前方位置でかつ苗搬送部30の下方位置には、下部支持フレーム形成体22の後方伸延部22aを介してフィルム切断部32を配設している。図1及び図2中、33はミッションケース3の左右側方にそれぞれ配設したタンク支持フレーム、Tは各タンク支持フレーム33上に載置した灌水用の水タンクである。図1中、34は鎮圧ローラである。
【0025】
苗搬送部30は、図3,図5及び図6に示すように、無端帯状の搬送ベルト40の表面部上にかつ後端縁部に沿わせて、多数の苗ホルダー体41を搬送ベルト40の伸延方向に間隔を開けて取り付けて、搬送ベルト40を複数のローラを介して正面視ないしは背面視略逆三角形状に掛け廻すことで、上部の苗供給域Xと右側下部の苗搬送域Yと左側下部の苗ホルダー戻り域Zを形成している。
【0026】
すなわち、苗搬送部30は、図3,図5及び図6に示すように、下部支持フレーム形成体22の後方伸延部22aに前後一対の搬送部支持フレーム形成体42を連設している。そして、各搬送部支持フレーム形成体42は上下方向に伸延する上下方向伸延部42aと、同上下方向伸延部42aの上端部の中途部を連設して左右方向に伸延する左右方向伸延部42bとを具備している。前後に対向する左右方向伸延部42b,42bの左側端部と右側端部には、それぞれ前後方向に軸線を向けた左側上部ローラ支軸43と右側上部ローラ支軸44とを架設し、各上部ローラ支軸43,44の前後部にローラ45,45,46,46を前後に対向させて取り付けている。前後に対向する上下方向伸延部42a,42aの下部間には前後方向に軸線を向けた左右一対の下部ローラ47,47を近接させて配置している。このようにして、上記したローラ45〜47間に搬送ベルト40を掛け廻している。
【0027】
図5及び図6中、48は右側上部のローラ46の端面より放射方向に突設した係合ピンであり、同係合ピン48はローラ46の周方向に複数個を等間隔に配置している。49は搬送ベルト40の前後側縁部に形成した係合孔であり、同係合孔49は搬送ベルト40の伸延方向に一定の間隔を開けて形成すると共に、同係合孔49に上記係合ピン48が係合して、ローラ46の回動に連動して搬送ベルト40が移送されるようにしている。50は搬送ベルト40の内周面に突設した前後方向への位置ずれ防止用突条片、51は左側上部ローラ支軸43に取り付けた回転体であり、同回転体51の周端縁部に形成した凹条部に上記位置ずれ防止用突条片50を係合させて、搬送ベルト40の前後方向への位置ずれを防止している。52はガード体、53は苗ホルダー体41に保持されて搬送される苗搬送域Yの苗Nを下方から保護する保護体、54は左側の下部ローラ47よりも左側上方に配置して苗ホルダー戻り域Zの中途部を上方へ凸状に折曲させて案内するガイドローラである。
【0028】
図5及び図6に示すように、搬送ベルト40の上面には、多数の仕切り壁55を係合孔49一つ置きに整合させて配置している。そして、隣接する仕切り壁55,55間に位置する搬送ベルト40の部分を一本分の苗Nの載置部40aとして、各載置部40aの後端縁部に苗ホルダー体41を配設している。
【0029】
また、右側上部ローラ支軸44は、図5及び図6に示すように、ミッションケース3の右側上部から右側方へ突出させた第1駆動軸56に駆動機構57を介して連動連結して、同駆動機構57により右側上部ローラ支軸44を介してローラ46,46を間欠的に同一方向(本実施形態では図6の背面視で時計廻り)にのみ回動させることで、搬送ベルト40を所定のピッチ毎(本実施形態では係合孔49の間隔を一ピッチとして二ピッチ毎)に搬送させるようにしている。
【0030】
苗ホルダー体41は、固定側ホルダー形成片41aと可動側ホルダー形成片41bとを具備すると共に、同可動側ホルダー形成片41bは、固定側ホルダー形成片41aに近接して苗Nの茎部kを挟持する挟持姿勢と、固定側ホルダー形成片41aから離隔して待機する待機姿勢との間で姿勢変更自在としている。そして、前記苗ホルダー戻り域Zの終端部近傍に、可動側ホルダー形成片41bを挟持姿勢から待機姿勢に姿勢を変更する姿勢変更体58を配置している。
【0031】
姿勢変更体58は、図3及び図6に示すように、可動側ホルダー形成片41bに設けた被作用片41cに作用する作用片58aを具備している。被作用片41cは可動側ホルダー形成片41bから外側方へ棒状に突設する一方、作用片58aは転動自在の作用ローラとなして、同作用ローラの周面が被作用片41cに作用するようにしている。
【0032】
移植部31は、図4に示すように、前記補助フレーム形成体23に植付回転軸60を左右方向に軸線を向けて軸支し、ミッションケース3から左側外方へ突出させた第2駆動軸59(図示2参照)に伝動軸ケース61(図1及び図2参照)を介して上記植付回転軸60の左側端部を連動連結している。一方、植付回転軸60の右側端部には植付駆動機構62を介して左右一対の移植爪63,63を連動連結して、両移植爪63,63の先端部が円弧状の往路軌跡K1と円弧状の復路軌跡K2とからなる移植軌跡Kを描いて往復作動するように構成している。そして、往路軌跡K1の始端部側に強制挟持作用体64を配設して、同強制挟持作用体64で左右一対の移植爪63,63の先端部を強制的に挟持作動させるようにしている。この際、左右一対の下部ローラ47,47の直後下方まで搬送された苗ホルダー体41が挟持している苗Nの茎部kを、強制挟持作用体64を介して左右一対の移植爪63,63の先端部が堅実に挟持して、苗ホルダー体41から苗Nを引き取る。そして、往路軌跡K1の終端部である畝U中に苗Nの茎部kを挿入して移植する。その後、左右一対の移植爪63,63の先端部同士は離隔動作して、茎部kの挟持状態を解除すると共に、復路軌跡K2を描いて元の始動位置に復帰する。そして、復路軌跡K2の中途部にスクレーパー体65を配設して、同スクレーパー体65中に左右一対の移植爪63,63の先端部を通過させることで、両移植爪63,63の先端部の内外側面に付着した泥土を掻き落とすようにしている。
【0033】
フィルム切断部32は、図4に示すように、前記移植部31により畝Uに苗Nを移植する直前に、移植箇所となるマルチフィルムMの部分を部分的に切断して開口部66を形成し、同開口部66中を通して畝Uに苗Nを移植するようにしている。
【0034】
すなわち、フィルム切断部32は、図4に示すように、下部支持フレーム形成体22の後方伸延部22aに取付ブラケット70を介して切断部本体71を取り付け、同切断部本体71に前記移植爪63,63よりも進行方向側である前方においてマルチフィルムMに向けて円板状の切断体72を進退自在に配設し、同切断体72を作動体73により進退作動させるようにしている。
【0035】
切断部本体71は、図7〜図9に示すように、取付ブラケット70にカバー体74の前端縁部を取り付け、同カバー体74の左側前端縁部に取り付けたロッド支持片75に前後方向に伸延するガイドロッド76の前端部を取り付けて、同ガイドロッド76を後下方へ向けて配置している。ガイドロッド76の中途部にはスライダー77をガイドロッド76の軸線方向にスライド自在に取り付け、同スライダー77の前端部77aと上記ロッド支持片75との間に弾性体としての押圧スプリング69をガイドロッド76の外周面に巻回して介設している。
【0036】
そして、図7〜図9に示すように、スライダー77の下面には左右方向に伸延するスライドピン78の左側端部78aを左側方へ突出状に固設している。上記カバー体74の右側下面には前後方向に伸延するガイド用長孔79を有するガイド片80を垂設し、同ガイド用長孔79にスライドピン78の右側端部78bを挿通して、同右側端部78bをガイド用長孔79に沿わせて前後方向に摺動自在となしている。
【0037】
また、図7〜図9に示すように、スライドピン78の中途部には、前部支持片81の前端部を取り付け、同前部支持片81の後部に後部支持片82の前部を前後方向にスライド位置調節自在に連結して、同後部支持片82の後端部に直交状態に支持壁片83の上面を固設している。支持壁片83の下面には左右一対の軸支持ブラケット84,84の上端部を取り付け、同軸支持ブラケット84,84の下端部間に左右方向に軸線を向けて切断体支軸85を架設している。切断体支軸85には転動軸としての筒状体86を回転自在に嵌合し、同筒状体86の中途部に切断体72の中央部を貫通状態にかつ一体的に取り付けている。
【0038】
切断体72は、図7〜図9に示すように、周縁部に鋸歯状の歯部72aを形成して進行方向と略直交する軸線を中心にして転動自在とし、かつ、圃場の移植箇所に進出して突入することでマルチフィルムMの抵抗力に抗して進行方向に転動しながら同マルチフィルムMを部分的に切断するようにしている。
【0039】
このように、周縁部を鋸歯状に形成した円板状の切断体72をマルチフィルムMの抵抗力に抗して進行方向に転動させることで、同マルチフィルムMを堅実に切断することができる。ここで、切断する長さ(切断することで形成される開口部66の大きさ)はマルチフィルムM上を転動する切断体72の回転数を増減することで適宜設定することができる。また、切断体72の周縁部に形成している鋸歯状の歯部72aのピッチを成形可能な限り狭くすることで、切断跡の美観を高めることができると共に、切り残しなく堅実に切断することができる。また、ピッチを狭く形成することができない場合には、本実施形態のように、切断体72の歯部72aが進行方向側に下り傾斜(いわゆる引き歯)となるように形成することで、転動する切断体72の歯部72aがマルチフィルムMに突入し易くなって、同マルチフィルムMの切断性能を高めることができる。
【0040】
支持壁片83の前端部には、図7〜図9に示すように、左右方向に軸線を向けた筒状枢支片87を固設している。進行方向である前後方向に伸延するソリ状に形成した規制体88の上面前部に、左右一対の連結片89,89を設けると共に、両連結片89,89を上記筒状枢支片87の両端部に配置して、両連結片89,89に筒状枢支片87中を通して枢支ピン90を貫通させて、規制体88の前部を回動自在に枢支している。規制体88の前端縁部には上方へソリ返し状に延設して受け片88aを形成している。一方、規制体88の後端部には上方へソリ返し状に延設してソリ状部88bを形成している。規制体88の左右幅の中央部には後端から前部にかけて伸延する切欠状溝部88cを形成して、切欠状溝部88cにより切断体72との干渉を回避している。91は支持壁片83の上面にブラケット92を介して前下方へ突出状に取り付けたストッパー片である。
【0041】
そして、規制体88は、図7及び図8に示すように、前記切断体72の近傍に配設すると共に、同規制体88は切断体72の圃場Gへの突入を限界位置に規制する突入規制姿勢(Fa)と、前記切断体72と他物との干渉を規制する干渉規制姿勢(Fb)との間で姿勢変更自在としている。
【0042】
しかも、図8に示す突入規制姿勢(Fa)では、前記マルチフィルムMを介して圃場G面から受ける反力により、規制体88は略水平姿勢にて前記軸支持ブラケット84,84の下端部84a,84aに下方から当接することで筒状体86を下方から支持して、切断体72の圃場Gへの突入を規制する姿勢を採るようにしている。この際、切断体72は規制体88の切欠状溝部88c中に配置される(図10参照)。
【0043】
また、図7に示す干渉規制姿勢(Fb)では、規制体88の自重により切断体72の下側周縁部に略沿った下り傾斜姿勢にて、切断体72と他物との干渉を規制する姿勢を採るようにしている。この際、干渉規制姿勢(Fb)では、規制体88の前端縁部から上方へ延設して形成した受け片88aがストッパー片91に当接することで、規制体88が図7の側面視で時計廻りに回動して切断体72から離隔するのを規制している。
【0044】
このように、規制体88を突入規制姿勢(Fa)と干渉規制姿勢(Fb)とに姿勢変更自在とすると共に、突入規制姿勢(Fa)を採る規制体88によって、切断体72を畝U中に突入する限界位置にて規制することができるため、図11に示すように、切断体72が限界以上に畝U中に潜り込むのを防止して、切断機能を良好に確保することができる。そのため、畝N面に凹凸がある場合でも切断体72が畝U中に潜り込むのを防止して、切断体72の転動性を良好に確保することができる。その結果、切断体72の切断機能を良好に確保することができて、移植作業効率を向上させることができる。ここで、切断体72の畝U中への突入限界位置としては、例えば、切断体72の転動中心位置(切断体支軸85の軸芯位置)までとすることができる。転動中心位置以上に切断体72が畝U中に潜り込むと、切断体72の転動が困難となるからである。
【0045】
また、干渉規制姿勢(Fb)を採る規制体88によって、切断体72が他物と干渉するのを規制することができる。そのため、図10及び図12に示すように、例えば、圃場Gに形成した一方通行の畝Uに苗Nを移植した後で、機体を後進させる必要性が生じた場合でも、切断体72が既移植苗Nに干渉して既移植苗Nを損傷等させるのを規制体88で防止することができる。
【0046】
また、図11に示すように、進行方向に伸延するソリ状に形成した規制体88を略水平姿勢の突入規制姿勢(Fa)となすことで、切断体72の転動軸としての筒状体86を下方から支持する規制体88によって、切断体72が畝U中に突入するのを規制することができる。この際、規制体88の進行方向側(前端縁部側)をソリ状となすことで、規制体88はマルチフィルムM上を円滑に滑動して、同規制体88がマルチフィルムMに潜り込むのを防止することができる。また、規制体88の進行方向側とは反対側(自由端側である後端縁部側)をソリ状となすことで、同規制体88の自由端側が下方に位置する傾斜姿勢でマルチフィルムM上に当接した場合にも、規制体88はマルチフィルムM上を円滑に滑動しながら姿勢を略水平姿勢に整えるため、規制体88は規制機能を良好に果たして、切断体72による切断性能を良好に確保することができる。
【0047】
また、図10及び図12に示すように、規制体88を切断体72の下側周縁部に略沿わせた下り傾斜姿勢の干渉規制姿勢(Fb)となすことで、規制体88によって切断体72と他物との干渉を規制することができる。この際、規制体88は切断体72の下側周縁部に略沿わせてソリ状に形成することで、切断体72と他物との干渉規制機能を高めることができる。
【0048】
作動体73は、図4に示すように、補助フレーム形成体23の前上部に左右方向に軸線を向けた枢軸93を取り付け、同枢軸93にボス部94を回転自在に嵌合して、ボス部94の周面に係合アーム95とカムフォロアーアーム96の各基端を、ボス部94の周方向に略90度変位させて取り付けて形成している。
【0049】
そして、図7〜図9に示すように、係合アーム95の先端部には係合片97を取り付けて、同係合片97が前記スライドピン78の左側端部78aに下方から係合するようにしている。また、カムフォロアーアーム96の先端部にはカムフォロアーとしての転動ローラ98を転動自在に取り付けて、同転動ローラ98が後述する回転カム99の外周面に当接するようにしている。回転カム99は、外周面に円弧状カム面99aと切り欠き状カム面99bとを形成しており、前記した移植部31の植付回転軸60の中途部に取り付けて、同植付回転軸60と一体的に回転するようにしている。
【0050】
このようにして、係合アーム95の先端部に取り付けた係合片97が、押圧スプリング69により畝U側に進出する方向に弾性付勢されているスライドピン78の左側端部78aに下方から係合しているため、係合アーム95とカムフォロアーアーム96は図7において反時計廻りの回動方向に弾性付勢されて、同フォロアーアーム96の先端部に取り付けた転動ローラ98が回転カム99の外周面に押圧状態に接触(当接)するようにしている。
【0051】
そして、図7に示すように、反時計廻りに回転する回転カム99の円弧状カム面99aに転動ローラ98が当接している状態では、フォロアーアーム96と係合アーム95が一体的に時計廻りに回動されて、係合片97が押圧スプリング69の弾性付勢力に抗してスライドピン78を介して切断体72を畝Uから離隔する前上方へ後退させるようにしている。しかも、最大限後退位置(ガイド用長孔79の上端縁にスライドピン78の周面が当接する位置)では、規制体88が強制的に干渉規制姿勢(Fb)に姿勢変更されるようにしている。
【0052】
ここで、ガイド片80の下端縁中途部には、図7に示すように、下方へ伸延させて伸延片100を形成し、同伸延片100の下端縁部に四角形板状の姿勢変更体101を鉛直下方へ垂設している。そして、最大限後退位置まで前上方へ向けて後退される規制体88の受け片88aの上端縁部が、姿勢変更体101の後面に当接すると共に上方へ摺動して、受け片88aと規制体88が一体に枢支ピン90を中心にして時計廻りに回動され、受け片88aがストッパー片91に当接したところでいずれの方向への回動も規制される。すなわち、受け片88aを介して規制体88が固定されることになって、同規制体88は強制的に干渉規制姿勢(Fb)に保持される。
【0053】
また、図8に示すように、回転カム99の切り欠き状カム面99bに転動ローラ98が当接している状態では、フォロアーアーム96に対する時計廻りへの回動付与力が解除されて、係合片97が押圧スプリング69の弾性付勢力によりスライドピン78を介して切断体72を畝U側である後下方へ進出させるようにしている。
【0054】
上記した切断体72の進退動作は、図10〜図12に示すように、移植爪63,63の先端部の移植軌跡Kを描いく往復動作と連動させて、切断体72によりマルチフィルムMを一部切断して形成した開口部66を通して畝Uに移植爪63,63で挟持した苗Nの茎部kを挿入するようにしている。
【0055】
すなわち、図10に示すように、移植爪63,63の先端部が復路軌跡K2の中途部に位置している際には、反時計廻りに回転する回転カム99の円弧状カム面99aの終端部に転動ローラ98が当接している。この際、切断体72は最大限後退位置で待機している。
【0056】
図11に示すように、移植爪63,63の先端部が最上昇位置まで移動した際には、反時計廻りに回転する回転カム99の切り欠き状カム面99bの終端部に転動ローラ98が当接している。この際、切断体72は畝U側に進出作動して、切断体72がマルチフィルムMを一部切断して開口部66を形成する。規制体88はマルチフィルムM上にて突入規制姿勢(Fa)を採り、切断体72の畝U中への突入を規制する。
【0057】
図12に示すように、左右一対の移植爪63,63の先端部が苗Nの茎部kを挟持して、往路軌跡K1の終端部である畝U中に上記開口部66を通して苗Nの茎部kを挿入して移植する際には、反時計廻りに回転する回転カム99の円弧状カム面99aの中途部に転動ローラ98が当接している。この際、切断体72は最大限後退位置まで後退される。
【0058】
また、左右一対の移植爪63,63を移植作動させるための動力を接続・切断する植付クラッチ(図示せず)を機体に設けると共に、同植付クラッチの切断動作に切断体の強制的後退動作を連動させている。本実施形態では、図13に示すように、前記したボス部94の上部周面に受動アーム103を上方へ向けて突設し、同受動アーム103の上端部を前記した昇降兼植付レバー25に連動ワイヤ104を介して連動連結している。
【0059】
すなわち、図13に示すように、ハンドル24に軸線を左右方向に向けたレバー支軸105を取り付け、同レバー支軸105にボス部106を介して昇降兼植付レバー25の基端部を枢支すると共に、同基端部には作動アーム107を下方へ向けて垂設して、同作動アーム107の下端部と上記受動アーム103の上端部との間に連動ワイヤ104を介設している。108は連動ワイヤ104のアウターワイヤ、109は連動ワイヤのインナーワイヤ、110,111はアウターワイヤ受け片である。112は作動アーム107の下端部に基端部を連結した植付クラッチ連動ワイヤであり、同植付クラッチ連動ワイヤ112はミッションケース3内に設けた植付クラッチ(図示せず)に先端部を連結している。
【0060】
このようにして、図13に示すように、昇降兼植付レバー25を後方へ傾動操作することで、植付クラッチ連動ワイヤ112を介して植付クラッチが切断作動されると共に、連動ワイヤ104を介して受動アーム103が時計廻りに回動されて、作動体73の係合アーム95も時計廻りに回動されるようにしている。そして、切断体72が強制的に最大限後退位置まで前上方へ向けて後退されると共に、規制体88が強制的に干渉規制姿勢(Fb)に保持されるようにしている。
【0061】
このように、植付クラッチの切断操作による切断動作と切断体72の強制的後退動作を連動させているため、植付クラッチを切断動作させる度に切断体72の後退動作が強制的に、すなわち、回転カム99の回転位置にかかわりなくなされる。そのため、植付クラッチを切断した直後に機体を移動させた場合でも、切断体72が強制的に後退動作してマルチフィルムMから堅実に離隔させることができるため、同切断体72がマルチフィルムMを損傷等するという不測の事態を回避することができる。
【0062】
しかも、植付クラッチを切断動作させる度に切断体72は強制的に後退動作されると共に、規制体88は切断体72と他物との干渉を規制する干渉規制姿勢(Fb)を保持するため、機体の移動時(特に機体を圃場へ出入りさせる時)において切断体72とマルチフィルムMが接触して、同マルチフィルムMを損傷等するという不具合を規制体88により回避することができる。この際、規制体88の干渉規制姿勢(Fb)は保持されるため、同規制体88による切断体72の干渉規制機能を良好に確保することができる。
【符号の説明】
【0063】
A 苗移植機
30 苗搬送部
31 移植部
32 フィルム切断部
72 切断体
88 規制体
【特許請求の範囲】
【請求項1】
一対の移植爪の先端部で苗の蔓状の茎部を挟持すると共に、両移植爪を進行方向側から後退方向側下方へ移動させて、マルチフィルムを張設した圃場中に茎部を挿入して移植する苗移植機であって、
両移植爪よりも進行方向側においてマルチフィルムに向けて円板状の切断体を進退自在に配設すると共に、同切断体は周縁部を鋸歯状に形成して進行方向と略直交する軸線を中心にして転動自在とし、かつ、圃場の移植箇所に進出して突入することでマルチフィルムの抵抗力に抗して進行方向に転動しながら同マルチフィルムを部分的に切断するようにしたことを特徴とする苗移植機。
【請求項2】
前記切断体の近傍には規制体を配設すると共に、同規制体は切断体の圃場への突入を限界位置に規制する突入規制姿勢と、前記切断体と他物との干渉を規制する干渉規制姿勢との間で姿勢変更自在としたことを特徴とする請求項1記載の苗移植機。
【請求項3】
規制体は進行方向に伸延するソリ状に形成して、切断体の転動中心となる転動軸の直進行方向側に規制体の一側端部を進行方向と略直交する軸線廻りに回動自在に枢支して配置すると共に、
上記規制体は、突入規制姿勢では、前記マルチフィルムを介して圃場面から受ける反力により、略水平姿勢にて前記転動軸を下方から支持して切断体の圃場への突入を規制する姿勢を採る一方、
干渉規制姿勢では、自重により切断体の下側周縁部に略沿った下り傾斜姿勢にて、切断体と他物との干渉を規制する姿勢を採るようにしたことを特徴とする請求項2記載の苗移植機。
【請求項4】
移植爪を移植作動させるための動力を接続・切断する植付クラッチを機体に設けると共に、同植付クラッチの切断動作に切断体の強制的後退動作を連動させたことを特徴とする請求項3記載の苗移植機。
【請求項5】
後退動作した切断体に対して干渉規制姿勢をとる規制体を固定して、干渉規制姿勢を保持することができるようにしたことを特徴とする請求項4記載の苗移植機。
【請求項1】
一対の移植爪の先端部で苗の蔓状の茎部を挟持すると共に、両移植爪を進行方向側から後退方向側下方へ移動させて、マルチフィルムを張設した圃場中に茎部を挿入して移植する苗移植機であって、
両移植爪よりも進行方向側においてマルチフィルムに向けて円板状の切断体を進退自在に配設すると共に、同切断体は周縁部を鋸歯状に形成して進行方向と略直交する軸線を中心にして転動自在とし、かつ、圃場の移植箇所に進出して突入することでマルチフィルムの抵抗力に抗して進行方向に転動しながら同マルチフィルムを部分的に切断するようにしたことを特徴とする苗移植機。
【請求項2】
前記切断体の近傍には規制体を配設すると共に、同規制体は切断体の圃場への突入を限界位置に規制する突入規制姿勢と、前記切断体と他物との干渉を規制する干渉規制姿勢との間で姿勢変更自在としたことを特徴とする請求項1記載の苗移植機。
【請求項3】
規制体は進行方向に伸延するソリ状に形成して、切断体の転動中心となる転動軸の直進行方向側に規制体の一側端部を進行方向と略直交する軸線廻りに回動自在に枢支して配置すると共に、
上記規制体は、突入規制姿勢では、前記マルチフィルムを介して圃場面から受ける反力により、略水平姿勢にて前記転動軸を下方から支持して切断体の圃場への突入を規制する姿勢を採る一方、
干渉規制姿勢では、自重により切断体の下側周縁部に略沿った下り傾斜姿勢にて、切断体と他物との干渉を規制する姿勢を採るようにしたことを特徴とする請求項2記載の苗移植機。
【請求項4】
移植爪を移植作動させるための動力を接続・切断する植付クラッチを機体に設けると共に、同植付クラッチの切断動作に切断体の強制的後退動作を連動させたことを特徴とする請求項3記載の苗移植機。
【請求項5】
後退動作した切断体に対して干渉規制姿勢をとる規制体を固定して、干渉規制姿勢を保持することができるようにしたことを特徴とする請求項4記載の苗移植機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2011−98(P2011−98A)
【公開日】平成23年1月6日(2011.1.6)
【国際特許分類】
【出願番号】特願2009−147916(P2009−147916)
【出願日】平成21年6月22日(2009.6.22)
【出願人】(000006781)ヤンマー株式会社 (3,810)
【Fターム(参考)】
【公開日】平成23年1月6日(2011.1.6)
【国際特許分類】
【出願日】平成21年6月22日(2009.6.22)
【出願人】(000006781)ヤンマー株式会社 (3,810)
【Fターム(参考)】
[ Back to top ]