
荒天時警報発令システム
【課題】将来遭遇する海気象において船舶に危険な所定挙動の発生有無を判定することができる荒天時警報発令システムを得る。
【解決手段】船舶の運動に関する情報を計測する船舶運動計測手段と、船舶が現在遭遇している海気象に関する情報を計測する海気象計測手段と、船舶運動計測手段および海気象計測手段の計測結果に基づき、所定時間後における、船舶が遭遇する海気象および船舶の運動状態を予測する演算装置6と、演算装置6の予測結果に基づき、所定時間後における船舶の所定挙動の発生有無を判定する演算装置6と、演算装置6の判定結果の情報を報知する表示装置8とを備えた。
【解決手段】船舶の運動に関する情報を計測する船舶運動計測手段と、船舶が現在遭遇している海気象に関する情報を計測する海気象計測手段と、船舶運動計測手段および海気象計測手段の計測結果に基づき、所定時間後における、船舶が遭遇する海気象および船舶の運動状態を予測する演算装置6と、演算装置6の予測結果に基づき、所定時間後における船舶の所定挙動の発生有無を判定する演算装置6と、演算装置6の判定結果の情報を報知する表示装置8とを備えた。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、船舶の航行を支援するシステムに関し、特に、荒天時における危険予測、避航操船を支援するシステムに関する。
【背景技術】
【0002】
従来の技術においては、「波浪中の運航状態の判定装置、に加えて運航状態の改善情報を与える操船手法推定装置を有し、操船者にリアルタイムで情報提供する操船支援方法およびシステム」が提案されている(例えば、特許文献1参照)。
【0003】
また、「航海中に自動的に荒天状態を検出して、船舶の安全を守るために主機遠隔操縦装置やオートパイロットを制御する」ものが提案されている(例えば、特許文献2参照)。
【0004】
また、船体の運動を予測する方法として、例えば自己回帰モデルを基本にするカルマンフィルターを使用する方法が開示されている(例えば、非特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−260315号公報
【特許文献2】特開平7−237589号公報
【非特許文献】
【0006】
【非特許文献1】大津 皓平、井関 俊夫、「船載型船体運動予測解析システムの研究−I」、日本航海学会論文集第92号、pp.177−184、平成7年3月
【発明の概要】
【発明が解決しようとする課題】
【0007】
従来の技術では、船舶装備の装置により船体の運動状態を計測し、船舶の危険状態を判定している。しかしながら、船体の運動のみから船体の状況を判断しているので、船舶が将来どのような海気象に遭遇し、その遭遇した海気象において船舶にどのような危険状態が発生し得るかを十分に判定することができない、という問題点があった。
また、従来の技術では、船舶に発生する危険状態を回避するための情報を操船者に提供することができない、という問題点があった。
【0008】
本発明は、上記のような課題を解決するためになされたもので、将来遭遇する海気象において船舶に危険な所定挙動の発生有無を判定することができる荒天時警報発令システムを得るものである。
また、船舶に危険な所定挙動の発生を回避するための情報を操船者に提示することができる荒天時警報発令システムを得るものである。
【課題を解決するための手段】
【0009】
本発明に係る荒天時警報発令システムは、船舶の運動に関する情報を計測する船舶運動計測手段と、船舶が現在遭遇している海気象に関する情報を計測する海気象計測手段と、船舶運動計測手段および海気象計測手段の計測結果に基づき、所定時間後における、船舶が遭遇する海気象および船舶の運動状態を予測する予測手段と、予測手段の予測結果に基づき、所定時間後における船舶の所定挙動の発生有無を判定する判定手段と、判定手段の判定結果の情報を報知する報知手段とを備えたものである。
【0010】
本発明に係る荒天時警報発令システムは、所定挙動の発生が判定されたとき、予測手段の予測結果に基づき、当該所定挙動の発生を回避するための操船に関する情報を求める回避演算手段を備え、報知手段は、操船に関する情報を報知するものである。
【0011】
本発明に係る荒天時警報発令システムは、操船に関する情報に基づき、船舶を自動操船する自動操船装置を備えたものである。
【0012】
本発明に係る荒天時警報発令システムにおいては、判定手段は、船舶の所定挙動として、海水打ち込み、スラミング、およびプロペラレーシングの少なくとも1つの発生有無を判定するものである。
【0013】
本発明に係る荒天時警報発令システムにおいては、船舶運動計測手段は、船舶の上下揺れ、縦揺れ、および横揺れを計測する動揺計測装置と、船舶の船速を計測する船速計測装置と、船舶の船首の方位を計測する方位計測装置とを備えたものである。
【0014】
本発明に係る荒天時警報発令システムにおいては、海気象計測手段は、船舶が現在遭遇している波浪を計測する波浪計測装置と、船舶が現在遭遇している風の風向および風速を計測する風向風速計とを備えたものである。
【0015】
本発明に係る荒天時警報発令システムにおいては、報知手段は、船舶運動計測手段の計測結果、海気象計測手段の計測結果、および予測手段の予測結果の少なくとも1つの情報を報知するものである。
【発明の効果】
【0016】
本発明は、船舶の運動に関する情報と船舶が現在遭遇している海気象に関する情報とに基づき、所定時間後における船舶が遭遇する海気象および船舶の運動状態を予測し、予測結果に基づき、所定時間後における船舶の所定挙動の発生有無を判定し、判定結果の情報を報知する。
このため、将来遭遇する海気象において船舶に危険な所定挙動の発生有無を判定することができる。
【図面の簡単な説明】
【0017】
【図1】実施の形態1に係る荒天時警報発令システムの構成を示す図である。
【図2】実施の形態1に係る荒天時警報発令システムの動作を示すフローチャートである。
【図3】実施の形態1に係る表示装置の表示画面を示す図である。
【図4】実施の形態2に係る荒天時警報発令システムの構成を示す図である。
【発明を実施するための形態】
【0018】
実施の形態1.
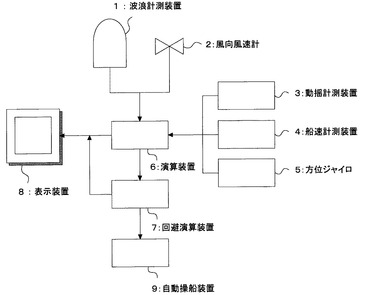
図1は実施の形態1に係る荒天時警報発令システムの構成を示す図である。
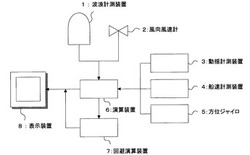
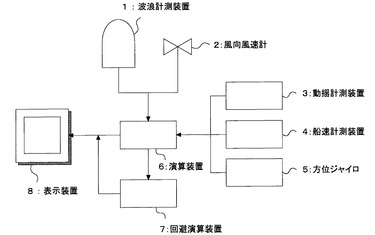
図1において、本実施の形態における荒天時警報発令システムは、波浪計測装置1、風向風速計2、動揺計測装置3、船速計測装置4、方位ジャイロ5、演算装置6、回避演算装置7、および表示装置8を備えている。本実施の形態における荒天時警報発令システムは船舶に設けられている。
この荒天時警報発令システムは、船舶に装備した各計測機器により、遭遇海気象(波浪・風)、船舶の動揺(上下揺れ・縦揺れ・横揺れ)、船速、船首方位等を時々刻々計測して、所定時間後(例えば数分後)に船舶が遭遇する海気象や船舶の運動状態を予測計測し、海水打ち込み・スラミング・プロペラレーシングといった船舶にとって危険な現象の発生有無を判定し、判定結果の報知、および危険な現象発生の回避方法を提示する機能を有するシステムである。
【0019】
波浪計測装置1は、船舶が現在遭遇している波浪(波高・波周期・波向)を計測する。
風向風速計2は、船舶が現在遭遇している風の風向および風速を計測する。
なお、本実施の形態における波浪、風の風向および風速の情報は、本発明における「海気象に関する情報」に相当する。なお、海気象に関する情報はこれに限るものではない。例えば、潮流などを計測するようにしても良い。
なお、「波浪計測装置1」および「風向風速計2」は、本発明における「海気象計測手段」を構成する。
【0020】
動揺計測装置3は、船舶の上下揺れ、縦揺れ、および横揺れを計測する。
船速計測装置4は、船舶の船速を計測する。
方位ジャイロ5は、船舶の船首の方位を計測する。
なお、本実施の形態における船舶の上下揺れ、縦揺れ、横揺れ、船速、および船首の方位の情報は、本発明における「船舶の運動に関する情報」に相当する。なお、船舶の運動に関する情報はこれに限るものではない。例えば加速度などを計測するようにしても良い。
なお、「動揺計測装置3」、「船速計測装置4」、および「方位ジャイロ5」は、本発明における「船舶運動計測手段」を構成する。
なお、「方位ジャイロ5」は、本発明における「方位計測装置」に相当する。
【0021】
演算装置6は、各計測結果に基づき、所定時間後における、船舶が遭遇する海気象および船舶の運動状態を予測する。
また、演算装置6は、前記予測結果に基づき、所定時間後(例えば数分後)における船舶の海水打ち込み、スラミング、およびプロペラレーシングの発生有無を判定する。
なお、本実施の形態における海水打ち込み、スラミング、およびプロペラレーシング(以下「危険状態」ともいう。)は、本発明における「所定挙動」に相当する。なお、所定挙動はこれに限るものではなく、当該船舶の航行に危険が生じ得る横揺れや加速度などでも良い。
なお、「演算装置6」は、本発明における「予測手段」および「判定手段」に相当する。
【0022】
なお、本実施の形態では、演算装置6は所定挙動として、海水打ち込み、スラミング、およびプロペラレーシングの発生の有無を判定する場合を説明するが、本発明はこれに限るものではなく、海水打ち込み、スラミング、およびプロペラレーシングのうち、1つまたは任意の2つのみの発生有無を判定するようにしても良い。
【0023】
回避演算装置7は、船舶の危険状態の発生が判定されたとき、演算装置6の予測結果に基づき、当該危険状態の発生を回避するための操船に関する情報を求める。
なお、「回避演算装置7」は、本発明における「回避演算手段」に相当する。
【0024】
演算装置6および回避演算装置7は、これらの機能を実現する回路デバイスなどのハードウェアで実現することもできるし、マイコンやCPUなどの演算装置上で実行されるソフトウェアとして実現することもできる。ソフトウェアとして実現する場合は、ROM(Read Only Memory)やHDD(Hard Disk Drive)等にこれら各部の機能を実現するプログラムを格納しておき、CPUやマイコンなどの演算装置がそのプログラムを読み込んで、プログラムの指示に従って各部の機能に相当する処理を実行することにより、構成することができる。また、ここではそれぞれ別の構成部(手段)として構成しているが、例えば、各部が行うプログラムに基づく処理を1つの制御演算処理装置により行うようにしても良い。
【0025】
表示装置8は、演算装置6の判定結果の情報を表示する。
また、表示装置8は、回避演算装置7が求めた操船に関する情報を表示する。
この表示装置8は、LCD(Liquid Crystal Display)等の任意の装置により構成することができる。
なお、「表示装置8」は、本発明における「報知手段」に相当する。
【0026】
なお、表示装置8は、波浪計測装置1、風向風速計2、動揺計測装置3、船速計測装置4、および方位ジャイロ5の計測結果、並びに、演算装置6が予測した当該船舶が遭遇する海気象および船舶の運動状態の少なくとも1つの情報を表示するようにしても良い。
なお、本実施の形態では表示装置8による表示により、各種の情報を報知する場合を説明するが本発明はこれに限るものではない。例えばスピーカやブザーなどにより報知手段を構成し、音声メッセージやブザー音などにより、危険状態の発生有無や各種の情報を報知するようにしても良い。
【0027】
次に、本実施の形態における荒天時警報発令システムの動作について説明する。
【0028】
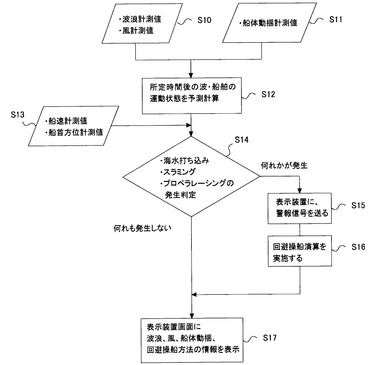
図2は実施の形態1に係る荒天時警報発令システムの動作を示すフローチャートである。以下、図2の各ステップに基づき説明する。
【0029】
(S10)
波浪計測装置1は、船舶が現在遭遇している波浪を時々刻々と計測し、計測結果を演算装置6に入力する。
風向風速計2は、船舶が現在遭遇している風の風向および風速を時々刻々と計測し、計測結果の情報を演算装置6に入力する。
【0030】
(S11)
動揺計測装置3は、船舶の上下揺れ、縦揺れ、および横揺れを時々刻々と計測し、計測結果の情報を演算装置6に入力する。
【0031】
(S12)
演算装置6は、入力された各計測情報に基づき、所定時間後(例えば数分後)における、船舶が遭遇する海気象(波浪・風)および船舶の運動状態(上下揺れ・縦揺れ・横揺れ)を予測する。
ここで、計測情報か所定時間後(未来)の値を予測する方法としては、例えば自己回帰モデルを基本にするカルマンフィルターを使用する方法が知られており(例えば非特許文献1参照)、このような公知の方法を演算装置6に組み込むことにより実現する。
【0032】
(S13)
船速計測装置4は、船舶の船速を時々刻々と計測し、計測結果の情報を演算装置6に入力する。
方位ジャイロ5は、船舶の船首の方位を時々刻々と計測し、計測結果の情報を演算装置6に入力する。
【0033】
(S14)
演算装置6は、上記ステップS12での予測結果と、上記ステップS13で入力された計測情報とに基づき、所定時間後(例えば数分後)における船舶の海水打ち込み、スラミング、およびプロペラレーシングの発生有無を判定する。
海水打ち込み、スラミング、およびプロペラレーシングの何れも発生しないと判定したとき、ステップS17へ進む。
【0034】
ここで、海水打ち込み、スラミング、およびプロペラレーシングの発生有無の判定は、例えば、これらの危険状態が発生する場合に想定される海気象および船舶の運動状態の条件や範囲を予め設定し、予測結果がこの条件を満たした場合や範囲を超えた場合に、危険状態の発生を判断する。
【0035】
(S15)
上記ステップS14で、海水打ち込み、スラミング、およびプロペラレーシングの何れかが発生すると判定したとき、演算装置6は、当該判定結果の情報を表示装置8へ入力する。
【0036】
(S16)
次に、回避演算装置7は、演算装置6の予測結果に基づき、当該危険状態の発生を回避するための操船に関する情報を求め、当該情報を表示装置8へ入力する。
この操船に関する情報としては、例えば、船舶の船速(減速量)や船舶の船首の方位(回避方向)を求める。
なお、操船に関する情報はこれに限らず、例えば動揺制御など他の操船制御の制御量を求めるようにしても良い。
【0037】
(S17)
表示装置8は、演算装置6から入力された危険状態の判定結果の情報を表示する。
また、表示装置8は、回避演算装置7から入力された操船に関する情報(減速量・回避方向)の情報を表示する。
さらに、表示装置8は、波浪計測装置1により計測された波浪情報と、風向風速計2により計測された風情報と、動揺計測装置3により計測された動揺情報とを表示する。
なお、表示装置8により表示する情報はこれに限らず、船速計測装置4および方位ジャイロ5の計測結果、並びに、演算装置6が予測した当該船舶が遭遇する海気象および船舶の運動状態の少なくとも1つの情報を表示するようにしても良い。
次に、表示装置8の表示内容の詳細について図3により説明する。
【0038】
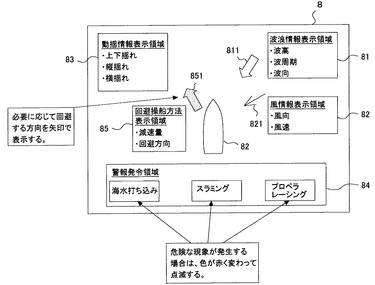
図3は実施の形態1に係る表示装置の表示画面を示す図である。
図3に示すように、表示装置8の表示画面の略中央には自船位置80を表示する。
また、表示画面には、波浪情報表示領域81と、風情報表示領域82と、動揺情報表示領域83と、警報発令領域84と、回避操船方法表示領域85とが設けられている。
【0039】
波浪情報表示領域81には、波浪計測装置1により計測された波浪情報(波高・波周期・波向)を表示する。
風情報表示領域82には、風向風速計2により計測された風情報(風向・風速)を表示する。
動揺情報表示領域83には、動揺計測装置3により計測された動揺情報(上下揺れ・縦揺れ・横揺れ)を表示する。
さらに、表示画面には、自船位置80に対して、波浪計測装置1により計測された波の向きを示す矢印811と、風向風速計2により計測された風の向きを示す矢印821を表示する。
【0040】
警報発令領域84には、演算装置6から入力された危険状態(海水打ち込み・スラミング・プロペラレーシング)の判定結果の情報を表示する。
例えば、海水打ち込み・スラミング・プロペラレーシングが発生すると判定された場合は、それぞれの表示領域の色を赤色で点滅表示させる。これにより、一目で警報発令状態と判別できる。
【0041】
回避操船方法表示領域85には、危険状態が発生すると判定された場合、回避演算装置7から入力された操船に関する情報(減速量・回避方向)の情報を表示する。
さらに、危険状態が発生する場合には、自船位置80に対して、当該危険状態を回避するための針路変更方向を示す矢印851を表示する。
【0042】
以上のように本実施の形態においては、船舶の運動に関する情報と、船舶が現在遭遇している海気象に関する情報とに基づき、所定時間後における、船舶が遭遇する海気象および船舶の運動状態を予測し、この予測結果に基づき、所定時間後における船舶の所定挙動の発生有無を判定し、判定結果の情報を報知する。
このため、将来遭遇する海気象において船舶に生じる危険状態の発生の有無を判定することができる。
また、現在遭遇している海気象の計測結果を勘案して、船舶の危険状態の発生有無を判定することから、船舶の状況をより高精度に検出することができる。
また、危険状態の発生有無を操船者に対して報知することができる。
また、将来(所定時間後)の状態を予測し、警報の発令を行うことから、操船者に危険状態を回避するための時間的余裕を与えることが可能となっている。
【0043】
また、所定挙動の発生が判定されたとき、演算装置6の予測結果に基づき、当該所定挙動の発生を回避するための操船に関する情報を求め、この操船に関する情報を報知する。
このため、船舶に危険な所定挙動の発生を回避するための情報を操船者に提示することができる。
将来(所定時間後)の状態を予測し、回避方法の提示を行うことから、操船者に危険状態を回避するための時間的余裕を与えることが可能となっている。
【0044】
また、表示装置8の表示画面に自船位置80を表示して、矢印811、821、851と、各表示領域に各情報を表示する。
このように、グラフィカルな画面に情報を表示することにより、操船者に必要な情報をより分かりやすく提供することが可能である。
【0045】
また、船舶の所定挙動(危険状態)として、海水打ち込み、スラミング、およびプロペラレーシングの少なくとも1つの発生有無を判定することができる。
【0046】
なお、本実施の形態1では、回避演算装置7により危険状態を回避するための操船に関する情報を求める場合を説明したが、本発明はこれに限らず、回避演算装置7を設けずに回避方法の提示を省略しても良い。
【0047】
実施の形態2.
図4は実施の形態2に係る荒天時警報発令システムの構成を示す図である。
図4に示すように、本実施の形態2における荒天時警報発令システムは、上記実施の形態1(図1)の構成に加え、自動操船装置9を備えている。
【0048】
本実施の形態2における回避演算装置7は、危険状態の発生を回避するための操船に関する情報を求めた際、この操船に関する情報に基づく指令値を自動操船装置9に入力する。この指令値としては、例えば船舶の船速を制御する船速指令値や、船舶の船首方位を制御する方位指令値などを求める。
【0049】
自動操船装置9は、演算装置6から指令値(船速指令値・方位指令値)に基づき、船舶を自動操船する。例えば、船舶が指令方位に進むための舵角を制御するとともに、指令船速となるように船舶の推進装置などを制御する。
なお、その他の構成および動作は実施の形態1と同様である。
【0050】
以上のように本実施の形態においては、回避演算装置7からの操船に関する情報に基づき、船舶を自動操船する自動操船装置9を備えた。
このため、船舶に危険状態が発生すると判定された場合に、操船者が操船することなく、自動的に危険状態を回避するための操船を実施することができる。
【符号の説明】
【0051】
1 波浪計測装置、2 風向風速計、3 動揺計測装置、4 船速計測装置、5 方位ジャイロ、6 演算装置、7 回避演算装置、8 表示装置、9 自動操船装置、80 自船位置、81 波浪情報表示領域、82 風情報表示領域、83 動揺情報表示領域、84 警報発令領域、85 回避操船方法表示領域。
【技術分野】
【0001】
本発明は、船舶の航行を支援するシステムに関し、特に、荒天時における危険予測、避航操船を支援するシステムに関する。
【背景技術】
【0002】
従来の技術においては、「波浪中の運航状態の判定装置、に加えて運航状態の改善情報を与える操船手法推定装置を有し、操船者にリアルタイムで情報提供する操船支援方法およびシステム」が提案されている(例えば、特許文献1参照)。
【0003】
また、「航海中に自動的に荒天状態を検出して、船舶の安全を守るために主機遠隔操縦装置やオートパイロットを制御する」ものが提案されている(例えば、特許文献2参照)。
【0004】
また、船体の運動を予測する方法として、例えば自己回帰モデルを基本にするカルマンフィルターを使用する方法が開示されている(例えば、非特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−260315号公報
【特許文献2】特開平7−237589号公報
【非特許文献】
【0006】
【非特許文献1】大津 皓平、井関 俊夫、「船載型船体運動予測解析システムの研究−I」、日本航海学会論文集第92号、pp.177−184、平成7年3月
【発明の概要】
【発明が解決しようとする課題】
【0007】
従来の技術では、船舶装備の装置により船体の運動状態を計測し、船舶の危険状態を判定している。しかしながら、船体の運動のみから船体の状況を判断しているので、船舶が将来どのような海気象に遭遇し、その遭遇した海気象において船舶にどのような危険状態が発生し得るかを十分に判定することができない、という問題点があった。
また、従来の技術では、船舶に発生する危険状態を回避するための情報を操船者に提供することができない、という問題点があった。
【0008】
本発明は、上記のような課題を解決するためになされたもので、将来遭遇する海気象において船舶に危険な所定挙動の発生有無を判定することができる荒天時警報発令システムを得るものである。
また、船舶に危険な所定挙動の発生を回避するための情報を操船者に提示することができる荒天時警報発令システムを得るものである。
【課題を解決するための手段】
【0009】
本発明に係る荒天時警報発令システムは、船舶の運動に関する情報を計測する船舶運動計測手段と、船舶が現在遭遇している海気象に関する情報を計測する海気象計測手段と、船舶運動計測手段および海気象計測手段の計測結果に基づき、所定時間後における、船舶が遭遇する海気象および船舶の運動状態を予測する予測手段と、予測手段の予測結果に基づき、所定時間後における船舶の所定挙動の発生有無を判定する判定手段と、判定手段の判定結果の情報を報知する報知手段とを備えたものである。
【0010】
本発明に係る荒天時警報発令システムは、所定挙動の発生が判定されたとき、予測手段の予測結果に基づき、当該所定挙動の発生を回避するための操船に関する情報を求める回避演算手段を備え、報知手段は、操船に関する情報を報知するものである。
【0011】
本発明に係る荒天時警報発令システムは、操船に関する情報に基づき、船舶を自動操船する自動操船装置を備えたものである。
【0012】
本発明に係る荒天時警報発令システムにおいては、判定手段は、船舶の所定挙動として、海水打ち込み、スラミング、およびプロペラレーシングの少なくとも1つの発生有無を判定するものである。
【0013】
本発明に係る荒天時警報発令システムにおいては、船舶運動計測手段は、船舶の上下揺れ、縦揺れ、および横揺れを計測する動揺計測装置と、船舶の船速を計測する船速計測装置と、船舶の船首の方位を計測する方位計測装置とを備えたものである。
【0014】
本発明に係る荒天時警報発令システムにおいては、海気象計測手段は、船舶が現在遭遇している波浪を計測する波浪計測装置と、船舶が現在遭遇している風の風向および風速を計測する風向風速計とを備えたものである。
【0015】
本発明に係る荒天時警報発令システムにおいては、報知手段は、船舶運動計測手段の計測結果、海気象計測手段の計測結果、および予測手段の予測結果の少なくとも1つの情報を報知するものである。
【発明の効果】
【0016】
本発明は、船舶の運動に関する情報と船舶が現在遭遇している海気象に関する情報とに基づき、所定時間後における船舶が遭遇する海気象および船舶の運動状態を予測し、予測結果に基づき、所定時間後における船舶の所定挙動の発生有無を判定し、判定結果の情報を報知する。
このため、将来遭遇する海気象において船舶に危険な所定挙動の発生有無を判定することができる。
【図面の簡単な説明】
【0017】
【図1】実施の形態1に係る荒天時警報発令システムの構成を示す図である。
【図2】実施の形態1に係る荒天時警報発令システムの動作を示すフローチャートである。
【図3】実施の形態1に係る表示装置の表示画面を示す図である。
【図4】実施の形態2に係る荒天時警報発令システムの構成を示す図である。
【発明を実施するための形態】
【0018】
実施の形態1.
図1は実施の形態1に係る荒天時警報発令システムの構成を示す図である。
図1において、本実施の形態における荒天時警報発令システムは、波浪計測装置1、風向風速計2、動揺計測装置3、船速計測装置4、方位ジャイロ5、演算装置6、回避演算装置7、および表示装置8を備えている。本実施の形態における荒天時警報発令システムは船舶に設けられている。
この荒天時警報発令システムは、船舶に装備した各計測機器により、遭遇海気象(波浪・風)、船舶の動揺(上下揺れ・縦揺れ・横揺れ)、船速、船首方位等を時々刻々計測して、所定時間後(例えば数分後)に船舶が遭遇する海気象や船舶の運動状態を予測計測し、海水打ち込み・スラミング・プロペラレーシングといった船舶にとって危険な現象の発生有無を判定し、判定結果の報知、および危険な現象発生の回避方法を提示する機能を有するシステムである。
【0019】
波浪計測装置1は、船舶が現在遭遇している波浪(波高・波周期・波向)を計測する。
風向風速計2は、船舶が現在遭遇している風の風向および風速を計測する。
なお、本実施の形態における波浪、風の風向および風速の情報は、本発明における「海気象に関する情報」に相当する。なお、海気象に関する情報はこれに限るものではない。例えば、潮流などを計測するようにしても良い。
なお、「波浪計測装置1」および「風向風速計2」は、本発明における「海気象計測手段」を構成する。
【0020】
動揺計測装置3は、船舶の上下揺れ、縦揺れ、および横揺れを計測する。
船速計測装置4は、船舶の船速を計測する。
方位ジャイロ5は、船舶の船首の方位を計測する。
なお、本実施の形態における船舶の上下揺れ、縦揺れ、横揺れ、船速、および船首の方位の情報は、本発明における「船舶の運動に関する情報」に相当する。なお、船舶の運動に関する情報はこれに限るものではない。例えば加速度などを計測するようにしても良い。
なお、「動揺計測装置3」、「船速計測装置4」、および「方位ジャイロ5」は、本発明における「船舶運動計測手段」を構成する。
なお、「方位ジャイロ5」は、本発明における「方位計測装置」に相当する。
【0021】
演算装置6は、各計測結果に基づき、所定時間後における、船舶が遭遇する海気象および船舶の運動状態を予測する。
また、演算装置6は、前記予測結果に基づき、所定時間後(例えば数分後)における船舶の海水打ち込み、スラミング、およびプロペラレーシングの発生有無を判定する。
なお、本実施の形態における海水打ち込み、スラミング、およびプロペラレーシング(以下「危険状態」ともいう。)は、本発明における「所定挙動」に相当する。なお、所定挙動はこれに限るものではなく、当該船舶の航行に危険が生じ得る横揺れや加速度などでも良い。
なお、「演算装置6」は、本発明における「予測手段」および「判定手段」に相当する。
【0022】
なお、本実施の形態では、演算装置6は所定挙動として、海水打ち込み、スラミング、およびプロペラレーシングの発生の有無を判定する場合を説明するが、本発明はこれに限るものではなく、海水打ち込み、スラミング、およびプロペラレーシングのうち、1つまたは任意の2つのみの発生有無を判定するようにしても良い。
【0023】
回避演算装置7は、船舶の危険状態の発生が判定されたとき、演算装置6の予測結果に基づき、当該危険状態の発生を回避するための操船に関する情報を求める。
なお、「回避演算装置7」は、本発明における「回避演算手段」に相当する。
【0024】
演算装置6および回避演算装置7は、これらの機能を実現する回路デバイスなどのハードウェアで実現することもできるし、マイコンやCPUなどの演算装置上で実行されるソフトウェアとして実現することもできる。ソフトウェアとして実現する場合は、ROM(Read Only Memory)やHDD(Hard Disk Drive)等にこれら各部の機能を実現するプログラムを格納しておき、CPUやマイコンなどの演算装置がそのプログラムを読み込んで、プログラムの指示に従って各部の機能に相当する処理を実行することにより、構成することができる。また、ここではそれぞれ別の構成部(手段)として構成しているが、例えば、各部が行うプログラムに基づく処理を1つの制御演算処理装置により行うようにしても良い。
【0025】
表示装置8は、演算装置6の判定結果の情報を表示する。
また、表示装置8は、回避演算装置7が求めた操船に関する情報を表示する。
この表示装置8は、LCD(Liquid Crystal Display)等の任意の装置により構成することができる。
なお、「表示装置8」は、本発明における「報知手段」に相当する。
【0026】
なお、表示装置8は、波浪計測装置1、風向風速計2、動揺計測装置3、船速計測装置4、および方位ジャイロ5の計測結果、並びに、演算装置6が予測した当該船舶が遭遇する海気象および船舶の運動状態の少なくとも1つの情報を表示するようにしても良い。
なお、本実施の形態では表示装置8による表示により、各種の情報を報知する場合を説明するが本発明はこれに限るものではない。例えばスピーカやブザーなどにより報知手段を構成し、音声メッセージやブザー音などにより、危険状態の発生有無や各種の情報を報知するようにしても良い。
【0027】
次に、本実施の形態における荒天時警報発令システムの動作について説明する。
【0028】
図2は実施の形態1に係る荒天時警報発令システムの動作を示すフローチャートである。以下、図2の各ステップに基づき説明する。
【0029】
(S10)
波浪計測装置1は、船舶が現在遭遇している波浪を時々刻々と計測し、計測結果を演算装置6に入力する。
風向風速計2は、船舶が現在遭遇している風の風向および風速を時々刻々と計測し、計測結果の情報を演算装置6に入力する。
【0030】
(S11)
動揺計測装置3は、船舶の上下揺れ、縦揺れ、および横揺れを時々刻々と計測し、計測結果の情報を演算装置6に入力する。
【0031】
(S12)
演算装置6は、入力された各計測情報に基づき、所定時間後(例えば数分後)における、船舶が遭遇する海気象(波浪・風)および船舶の運動状態(上下揺れ・縦揺れ・横揺れ)を予測する。
ここで、計測情報か所定時間後(未来)の値を予測する方法としては、例えば自己回帰モデルを基本にするカルマンフィルターを使用する方法が知られており(例えば非特許文献1参照)、このような公知の方法を演算装置6に組み込むことにより実現する。
【0032】
(S13)
船速計測装置4は、船舶の船速を時々刻々と計測し、計測結果の情報を演算装置6に入力する。
方位ジャイロ5は、船舶の船首の方位を時々刻々と計測し、計測結果の情報を演算装置6に入力する。
【0033】
(S14)
演算装置6は、上記ステップS12での予測結果と、上記ステップS13で入力された計測情報とに基づき、所定時間後(例えば数分後)における船舶の海水打ち込み、スラミング、およびプロペラレーシングの発生有無を判定する。
海水打ち込み、スラミング、およびプロペラレーシングの何れも発生しないと判定したとき、ステップS17へ進む。
【0034】
ここで、海水打ち込み、スラミング、およびプロペラレーシングの発生有無の判定は、例えば、これらの危険状態が発生する場合に想定される海気象および船舶の運動状態の条件や範囲を予め設定し、予測結果がこの条件を満たした場合や範囲を超えた場合に、危険状態の発生を判断する。
【0035】
(S15)
上記ステップS14で、海水打ち込み、スラミング、およびプロペラレーシングの何れかが発生すると判定したとき、演算装置6は、当該判定結果の情報を表示装置8へ入力する。
【0036】
(S16)
次に、回避演算装置7は、演算装置6の予測結果に基づき、当該危険状態の発生を回避するための操船に関する情報を求め、当該情報を表示装置8へ入力する。
この操船に関する情報としては、例えば、船舶の船速(減速量)や船舶の船首の方位(回避方向)を求める。
なお、操船に関する情報はこれに限らず、例えば動揺制御など他の操船制御の制御量を求めるようにしても良い。
【0037】
(S17)
表示装置8は、演算装置6から入力された危険状態の判定結果の情報を表示する。
また、表示装置8は、回避演算装置7から入力された操船に関する情報(減速量・回避方向)の情報を表示する。
さらに、表示装置8は、波浪計測装置1により計測された波浪情報と、風向風速計2により計測された風情報と、動揺計測装置3により計測された動揺情報とを表示する。
なお、表示装置8により表示する情報はこれに限らず、船速計測装置4および方位ジャイロ5の計測結果、並びに、演算装置6が予測した当該船舶が遭遇する海気象および船舶の運動状態の少なくとも1つの情報を表示するようにしても良い。
次に、表示装置8の表示内容の詳細について図3により説明する。
【0038】
図3は実施の形態1に係る表示装置の表示画面を示す図である。
図3に示すように、表示装置8の表示画面の略中央には自船位置80を表示する。
また、表示画面には、波浪情報表示領域81と、風情報表示領域82と、動揺情報表示領域83と、警報発令領域84と、回避操船方法表示領域85とが設けられている。
【0039】
波浪情報表示領域81には、波浪計測装置1により計測された波浪情報(波高・波周期・波向)を表示する。
風情報表示領域82には、風向風速計2により計測された風情報(風向・風速)を表示する。
動揺情報表示領域83には、動揺計測装置3により計測された動揺情報(上下揺れ・縦揺れ・横揺れ)を表示する。
さらに、表示画面には、自船位置80に対して、波浪計測装置1により計測された波の向きを示す矢印811と、風向風速計2により計測された風の向きを示す矢印821を表示する。
【0040】
警報発令領域84には、演算装置6から入力された危険状態(海水打ち込み・スラミング・プロペラレーシング)の判定結果の情報を表示する。
例えば、海水打ち込み・スラミング・プロペラレーシングが発生すると判定された場合は、それぞれの表示領域の色を赤色で点滅表示させる。これにより、一目で警報発令状態と判別できる。
【0041】
回避操船方法表示領域85には、危険状態が発生すると判定された場合、回避演算装置7から入力された操船に関する情報(減速量・回避方向)の情報を表示する。
さらに、危険状態が発生する場合には、自船位置80に対して、当該危険状態を回避するための針路変更方向を示す矢印851を表示する。
【0042】
以上のように本実施の形態においては、船舶の運動に関する情報と、船舶が現在遭遇している海気象に関する情報とに基づき、所定時間後における、船舶が遭遇する海気象および船舶の運動状態を予測し、この予測結果に基づき、所定時間後における船舶の所定挙動の発生有無を判定し、判定結果の情報を報知する。
このため、将来遭遇する海気象において船舶に生じる危険状態の発生の有無を判定することができる。
また、現在遭遇している海気象の計測結果を勘案して、船舶の危険状態の発生有無を判定することから、船舶の状況をより高精度に検出することができる。
また、危険状態の発生有無を操船者に対して報知することができる。
また、将来(所定時間後)の状態を予測し、警報の発令を行うことから、操船者に危険状態を回避するための時間的余裕を与えることが可能となっている。
【0043】
また、所定挙動の発生が判定されたとき、演算装置6の予測結果に基づき、当該所定挙動の発生を回避するための操船に関する情報を求め、この操船に関する情報を報知する。
このため、船舶に危険な所定挙動の発生を回避するための情報を操船者に提示することができる。
将来(所定時間後)の状態を予測し、回避方法の提示を行うことから、操船者に危険状態を回避するための時間的余裕を与えることが可能となっている。
【0044】
また、表示装置8の表示画面に自船位置80を表示して、矢印811、821、851と、各表示領域に各情報を表示する。
このように、グラフィカルな画面に情報を表示することにより、操船者に必要な情報をより分かりやすく提供することが可能である。
【0045】
また、船舶の所定挙動(危険状態)として、海水打ち込み、スラミング、およびプロペラレーシングの少なくとも1つの発生有無を判定することができる。
【0046】
なお、本実施の形態1では、回避演算装置7により危険状態を回避するための操船に関する情報を求める場合を説明したが、本発明はこれに限らず、回避演算装置7を設けずに回避方法の提示を省略しても良い。
【0047】
実施の形態2.
図4は実施の形態2に係る荒天時警報発令システムの構成を示す図である。
図4に示すように、本実施の形態2における荒天時警報発令システムは、上記実施の形態1(図1)の構成に加え、自動操船装置9を備えている。
【0048】
本実施の形態2における回避演算装置7は、危険状態の発生を回避するための操船に関する情報を求めた際、この操船に関する情報に基づく指令値を自動操船装置9に入力する。この指令値としては、例えば船舶の船速を制御する船速指令値や、船舶の船首方位を制御する方位指令値などを求める。
【0049】
自動操船装置9は、演算装置6から指令値(船速指令値・方位指令値)に基づき、船舶を自動操船する。例えば、船舶が指令方位に進むための舵角を制御するとともに、指令船速となるように船舶の推進装置などを制御する。
なお、その他の構成および動作は実施の形態1と同様である。
【0050】
以上のように本実施の形態においては、回避演算装置7からの操船に関する情報に基づき、船舶を自動操船する自動操船装置9を備えた。
このため、船舶に危険状態が発生すると判定された場合に、操船者が操船することなく、自動的に危険状態を回避するための操船を実施することができる。
【符号の説明】
【0051】
1 波浪計測装置、2 風向風速計、3 動揺計測装置、4 船速計測装置、5 方位ジャイロ、6 演算装置、7 回避演算装置、8 表示装置、9 自動操船装置、80 自船位置、81 波浪情報表示領域、82 風情報表示領域、83 動揺情報表示領域、84 警報発令領域、85 回避操船方法表示領域。
【特許請求の範囲】
【請求項1】
船舶の運動に関する情報を計測する船舶運動計測手段と、
前記船舶が現在遭遇している海気象に関する情報を計測する海気象計測手段と、
前記船舶運動計測手段および前記海気象計測手段の計測結果に基づき、所定時間後における、前記船舶が遭遇する海気象および前記船舶の運動状態を予測する予測手段と、
前記予測手段の予測結果に基づき、前記所定時間後における前記船舶の所定挙動の発生有無を判定する判定手段と、
前記判定手段の判定結果の情報を報知する報知手段と
を備えたことを特徴とする荒天時警報発令システム。
【請求項2】
前記所定挙動の発生が判定されたとき、前記予測手段の予測結果に基づき、当該所定挙動の発生を回避するための操船に関する情報を求める回避演算手段を備え、
前記報知手段は、
前記操船に関する情報を報知する
ことを特徴とする請求項1記載の荒天時警報発令システム。
【請求項3】
前記操船に関する情報に基づき、前記船舶を自動操船する自動操船装置を備えた
ことを特徴とする請求項2記載の荒天時警報発令システム。
【請求項4】
前記判定手段は、
前記船舶の所定挙動として、海水打ち込み、スラミング、およびプロペラレーシングの少なくとも1つの発生有無を判定する
ことを特徴とする請求項1〜3の何れか1項に記載の荒天時警報発令システム。
【請求項5】
前記船舶運動計測手段は、
前記船舶の上下揺れ、縦揺れ、および横揺れを計測する動揺計測装置と、
前記船舶の船速を計測する船速計測装置と、
前記船舶の船首の方位を計測する方位計測装置と
を備えたことを特徴とする請求項1〜4の何れか1項に記載の荒天時警報発令システム。
【請求項6】
前記海気象計測手段は、
前記船舶が現在遭遇している波浪を計測する波浪計測装置と、
前記船舶が現在遭遇している風の風向および風速を計測する風向風速計と
を備えたことを特徴とする請求項1〜5の何れか1項に記載の荒天時警報発令システム。
【請求項7】
前記報知手段は、
前記船舶運動計測手段の計測結果、前記海気象計測手段の計測結果、および前記予測手段の予測結果の少なくとも1つの情報を報知する
ことを特徴とする請求項1〜6の何れか1項に記載の荒天時警報発令システム。
【請求項1】
船舶の運動に関する情報を計測する船舶運動計測手段と、
前記船舶が現在遭遇している海気象に関する情報を計測する海気象計測手段と、
前記船舶運動計測手段および前記海気象計測手段の計測結果に基づき、所定時間後における、前記船舶が遭遇する海気象および前記船舶の運動状態を予測する予測手段と、
前記予測手段の予測結果に基づき、前記所定時間後における前記船舶の所定挙動の発生有無を判定する判定手段と、
前記判定手段の判定結果の情報を報知する報知手段と
を備えたことを特徴とする荒天時警報発令システム。
【請求項2】
前記所定挙動の発生が判定されたとき、前記予測手段の予測結果に基づき、当該所定挙動の発生を回避するための操船に関する情報を求める回避演算手段を備え、
前記報知手段は、
前記操船に関する情報を報知する
ことを特徴とする請求項1記載の荒天時警報発令システム。
【請求項3】
前記操船に関する情報に基づき、前記船舶を自動操船する自動操船装置を備えた
ことを特徴とする請求項2記載の荒天時警報発令システム。
【請求項4】
前記判定手段は、
前記船舶の所定挙動として、海水打ち込み、スラミング、およびプロペラレーシングの少なくとも1つの発生有無を判定する
ことを特徴とする請求項1〜3の何れか1項に記載の荒天時警報発令システム。
【請求項5】
前記船舶運動計測手段は、
前記船舶の上下揺れ、縦揺れ、および横揺れを計測する動揺計測装置と、
前記船舶の船速を計測する船速計測装置と、
前記船舶の船首の方位を計測する方位計測装置と
を備えたことを特徴とする請求項1〜4の何れか1項に記載の荒天時警報発令システム。
【請求項6】
前記海気象計測手段は、
前記船舶が現在遭遇している波浪を計測する波浪計測装置と、
前記船舶が現在遭遇している風の風向および風速を計測する風向風速計と
を備えたことを特徴とする請求項1〜5の何れか1項に記載の荒天時警報発令システム。
【請求項7】
前記報知手段は、
前記船舶運動計測手段の計測結果、前記海気象計測手段の計測結果、および前記予測手段の予測結果の少なくとも1つの情報を報知する
ことを特徴とする請求項1〜6の何れか1項に記載の荒天時警報発令システム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−51500(P2012−51500A)
【公開日】平成24年3月15日(2012.3.15)
【国際特許分類】
【出願番号】特願2010−196802(P2010−196802)
【出願日】平成22年9月2日(2010.9.2)
【出願人】(502116922)ユニバーサル造船株式会社 (172)
【Fターム(参考)】
【公開日】平成24年3月15日(2012.3.15)
【国際特許分類】
【出願日】平成22年9月2日(2010.9.2)
【出願人】(502116922)ユニバーサル造船株式会社 (172)
【Fターム(参考)】
[ Back to top ]