
荷役作業用の搬送装置
【課題】中継搬送を行う全ての運搬車両に対してその荷台の高さに応じた高さに中継搬送装置を自動的に昇降させることができる荷役作業用の搬送装置提供すること。
【解決手段】物品搬送箇所Z1の高さに応じて定めた第1昇降位置への昇降が昇降指令手段RMにて指令されると中継搬送手段TRを第1昇降位置に昇降させ、且つ、運搬車両Tの荷台2の高さに応じて変更設定自在な第2昇降位置H2への昇降が昇降指令手段RMにて指令されると中継搬送手段TRを第2昇降位置H2に昇降させるべく、第1昇降位置検出手段DET1の検出情報及び第2昇降位置検出手段DET2の検出情報に基づいて昇降駆動手段ELを作動させる昇降制御手段HCが設けられている荷役作業用の搬送装置を構成した。
【解決手段】物品搬送箇所Z1の高さに応じて定めた第1昇降位置への昇降が昇降指令手段RMにて指令されると中継搬送手段TRを第1昇降位置に昇降させ、且つ、運搬車両Tの荷台2の高さに応じて変更設定自在な第2昇降位置H2への昇降が昇降指令手段RMにて指令されると中継搬送手段TRを第2昇降位置H2に昇降させるべく、第1昇降位置検出手段DET1の検出情報及び第2昇降位置検出手段DET2の検出情報に基づいて昇降駆動手段ELを作動させる昇降制御手段HCが設けられている荷役作業用の搬送装置を構成した。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、地上側の物品搬送箇所と運搬車両における荷台の存在予定箇所との間に昇降自在に配置されて物品の中継搬送を行う中継搬送装置と、その中継搬送装置を昇降駆動する昇降駆動手段とが設けられた荷役作業用の搬送装置に関する。
【背景技術】
【0002】
上記の荷役作業用の搬送装置は、例えば、工場や物流施設等の出荷口において、物品搬送箇所に次々に搬送されてくる出荷対象の物品を、運搬車両の荷台に順次積み込む作業を行う場合に、中継搬送装置を物品搬送箇所の高さに応じた昇降位置に位置させた状態で物品を中継搬送装置に載せ、中継搬送装置を運搬車両の荷台の高さに応じた昇降位置に位置させた状態で物品を運搬車両の荷台に卸すことができるように、物品搬送箇所の高さに応じた昇降位置と運搬車両の荷台の高さに応じた昇降位置とに亘って、中継搬送装置を繰返し往復昇降移動させて、地上側の物品搬送箇所と高さの異なる運搬車両における荷台との間で物品を中継搬送するために使用するものである。ちなみに、上記の荷役作業用の搬送装置は、入荷対象の物品を運搬車両の荷台から地上側の物品搬送箇所に積み卸す場合にも使用される。
【0003】
かかる荷役作業用の搬送装置として、運搬車両の荷台の後面に設けられた位置合わせ用の被検出部材を検出する光センサが、中継搬送装置と一体昇降するように設けられ、中継搬送装置を運搬車両の荷台の高さに応じた高さに上昇させることを指令する位置合わせボタンと、中継搬送装置を地上側の物品搬送箇所の高さに応じて定めた昇降位置に下降させることを指令する完了ボタンとを備えたコントローラが設けられて、完了ボタンの指令により、中継搬送装置を地上側の物品搬送箇所の高さに応じた高さに自動下降させるように昇降駆動手段としての油圧リフタを作動させ、位置合わせボタンの指令により、中継搬送装置を上昇させ且つ光センサが位置合わせ用の被検出部材を検出すると停止させるように油圧リフタを作動させるように構成されたものがある(例えば、特許文献1参照。)。
尚、この特許文献1には記載されていないが、地上側の物品搬送箇所の高さに応じて定めた昇降位置に中継搬送装置が位置することを検出する位置検出手段が装備されて、この位置検出手段の検出情報に基づいて、完了ボタンの指令により、中継搬送装置を地上側の物品搬送箇所の高さに応じた高さに自動下降させることになる。
つまり、この特許文献1に記載の荷役作業用の搬送装置は、完了ボタンや位置合わせボタンを押すだけで、中継搬送装置を地上側の物品搬送箇所の高さに応じた高さや運搬車両の荷台の高さに応じた高さに自動的に昇降させることができるものであるから、地上側の物品搬送箇所と運搬車両の荷台との間で物品を中継搬送するために、中継搬送装置を地上側の物品搬送箇所の高さに応じた高さや運搬車両の荷台の高さに応じた高さに繰り返し昇降させることを、簡単な操作で行えるものとなる。
【0004】
【特許文献1】特開2000−062963号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところが、上記特許文献1の荷役作業用の搬送装置では、中継搬送手段を運搬車両の荷台の高さに応じた高さに自動的に昇降させるためには、上述の通り位置合わせ用の被検出部材を運搬車両の荷台の後面に設ける必要があるので、被検出部材を設けていない運搬車両の荷台に対しては、中継搬送手段を運搬車両の荷台の高さに応じた高さに自動的に昇降させることができないという問題があった。
ちなみに、荷役作業用の搬送装置においては、一般に、手動操作式の上昇指令スイッチや手動操作式の下降指令スイッチが備えられ、昇降駆動手段の作動を制御する昇降制御手段が、上昇指令スイッチにて上昇が指令されている間だけ中継搬送装置を上昇させ、且つ、下降指令スイッチにて下降が指令されている間だけ中継搬送装置を下降させるように昇降駆動手段の作動を制御するように構成される等、中継搬送装置を任意に手動昇降操作できるように構成されるものであり、被検出部材が設けられていない運搬車に対しては、中継搬送装置を手動昇降操作しながら中継搬送を行わせることになるが、このような手動昇降操作は、中継搬送装置と運搬車の荷台との関係を目視にて確認しながら行う煩雑なものであり、このような煩雑な操作を繰り返し行うことは作業者に大きな負担をかけるものとなる。
本発明は、上記実状に鑑みて為されたものであって、その目的は、中継搬送を行う全ての運搬車両に対してその荷台の高さに応じた高さに中継搬送装置を自動的に昇降させることができる荷役作業用の搬送装置を提供する点にある。
【課題を解決するための手段】
【0006】
本発明の第1特徴は、地上側の物品搬送箇所と運搬車両における荷台の存在予定箇所との間に昇降自在に配置されて物品の中継搬送を行う中継搬送装置と、その中継搬送装置を昇降駆動する昇降駆動手段とが設けられた荷役作業用の搬送装置において、
前記中継搬送装置が前記物品搬送箇所の高さに応じて定めた第1昇降位置に位置することを検出する第1昇降位置検出手段と、
前記中継搬送装置が前記運搬車両の荷台の高さに応じて変更設定自在な第2昇降位置に位置することを検出する第2昇降位置検出手段と、
昇降指令手段にて前記第1昇降位置への昇降が指令されると
前記中継搬送手段を前記第1昇降位置に昇降させ、且つ、
前記昇降指令手段にて前記第2昇降位置への昇降が指令されると
前記中継搬送手段を前記第2昇降位置に昇降させるべく、
前記第1昇降位置検出手段の検出情報及び前記第2昇降位置検出手段の検出情報に基づいて前記昇降駆動手段を作動させる昇降制御手段が設けられている点にある。
【0007】
本発明の第1特徴によると、昇降指令手段にて前記第1昇降位置への昇降が指令されると、前記昇降制御手段が前記第1昇降位置検出手段の検出情報に基づいて前記昇降駆動手段を作動させて、前記中継搬送手段を物品搬送箇所の高さに応じて定めた前記第1昇降位置に昇降させるので、昇降指令手段にて第1昇降位置への昇降を指令することにより、中継搬送手段を物品搬送箇所に応じた高さに自動的に昇降させることができる。
【0008】
また、昇降指令手段にて前記第2昇降位置への昇降が指令されると、前記昇降制御手段が前記第2昇降位置検出手段の検出情報に基づいて前記昇降駆動手段を作動させて、前記中継搬送手段を前記第2昇降位置に昇降させる。
【0009】
第2昇降位置検出手段は、中継搬送装置が前記運搬車両の荷台の高さに応じた昇降位置である第2昇降位置に位置することを検出するものであって、運搬車両によって荷台の高さが異なっても、第2昇降位置を運搬車両の荷台の高さに応じた適切な高さに変更設定できるものであるから、中継搬送装置が、積み込みや積み卸しを行う作業対象の運搬車両の荷台の高さに応じた適切な高さに位置することを検出することができる。つまり、積み込みや積み卸しを行う運搬車両の荷台の高さが異なる場合でも、運搬車両の荷台の高さに応じて第2昇降位置を変更設定するだけで、昇降指令手段にて第2昇降位置への昇降を指令することにより、中継搬送手段を、運搬車両の荷台の高さに応じて設定した高さに自動的に昇降させることができるものであり、しかも、このように運搬車両の荷台の高さに応じた高さに中継搬送装置を自動的に昇降させることを運搬車両に特別な装備を設けることなく行えるものであるため、中継搬送を行うことになる全ての運搬車両に対して、その荷台の高さに応じた高さに中継搬送装置を自動的に昇降させることができるものとなる。
【0010】
したがって、本発明の第1特徴によると、中継搬送を行う全ての運搬車両に対してその荷台の高さに応じた高さに中継搬送装置を自動的に昇降させることができる荷役作業用の搬送装置を得るに至った。
【0011】
本発明の第2特徴は、本発明の第1特徴において、前記第2昇降位置検出手段が、前記中継搬送装置を検出する検出センサを、その設置高さに対応する高さに前記中継搬送装置が位置するときに前記中継搬送装置を検出する状態で且つ地上側に設置した支持体に対して上下方向での支持位置を変更調整自在に取り付ける状態で設けて構成されている点にある。
【0012】
本発明の第2特徴によると、本発明の第1特徴と同様の作用に加えて、以下のような作用を奏する。
検出センサは、その設置高さに対応する高さに中継搬送装置が位置するときに中継搬送装置を検出するものであるから、検出センサの支持体における上下方向での支持位置を運搬車両の荷台の高さに応じて変更調整することにより、中継搬送装置が運搬車両の荷台の高さに応じた高さに昇降したときに、検出センサが中継搬送装置を検出するようにすることができる。つまり、検出センサの支持体における上下方向での支持位置を変更調整することにより第2昇降位置を変更設定することができる。
【0013】
したがって、第2昇降位置を運搬車両の荷台の高さに応じた高さに変更設定する場合には、運搬車両の荷台の高さを見ながら地上側に設置した支持体における検出センサの上下方向での支持位置を変更する簡単な作業により、第2昇降位置を変更設定することができる。
【0014】
このように、本発明の第2特徴によると、第2昇降位置を運搬車両の荷台の高さに応じた高さに変更設定する場合に、変更設定作業を容易に行うことができる荷役作業用の搬送装置を得るに至った。
【0015】
本発明の第3特徴は、本発明の第1特徴において、前記第2昇降位置検出手段が、前記中継搬送装置に一体的に昇降するように設けた検出センサが検出作用する被検知体を、その設置高さに対応する高さに前記検出センサが位置するときに検出作用される状態で且つ地上側に設置した支持体に対して上下方向での支持位置を変更調整自在に取り付ける状態で設けて構成されている点にある。
【0016】
本発明の第3特徴によると、本発明の第1特徴と同様の作用に加えて、以下のような作用を奏する。
検出センサが検出作用する被検知体は、その設置高さに対応する高さに検出センサが位置するときに検出作用される状態で、地上側に設置した支持体に対して上下方向での支持位置を変更調整自在に取り付ける状態で設けられているので、被検出体の支持体における上下方向での支持位置を運搬車両の荷台の高さに応じて変更調整することにより、中継搬送装置が運搬車両の荷台の高さに応じた高さに昇降したときに、検出センサが被検出体を検出するようにすることができる。つまり、被検出体の支持体における上下方向での支持位置を変更調整することにより第2昇降位置を変更設定することができる。
【0017】
したがって、第2昇降位置を運搬車両の荷台の高さに応じた高さに変更設定する場合には、運搬車両の荷台の高さを見ながら地上側に設置した支持体における被検知体の上下方向での支持位置を変更する簡単な作業により、第2昇降位置を変更設定することができる。
【0018】
さらに、検出センサは、中継搬送装置に一体的に昇降するように設けられるので、地上側に設置された支持体や被検出体には制御信号用の配線等を設ける必要がないため、制御信号用の配線等の引き回しの可否に起因して荷役作業用の搬送装置の設置場所が制約されるおそれが少ないものとなる。
【0019】
このように、本発明の第3特徴によると、第2昇降位置を運搬車両の荷台の高さに応じた高さに変更設定する場合に、変更設定作業を容易に行うことができるものであり、しかも、第2昇降位置検出手段を設けるときの配線等の条件が有利な荷役作業用の搬送装置を得るに至った。
【0020】
本発明の第4特徴は、本発明の第1特徴において、前記第2昇降位置検出手段が、前記中継搬送装置の昇降方向での昇降位置を検出する昇降位置検出センサと、前記第2昇降位置に対応する目標昇降位置を変更設定する目標昇降位置設定手段と、前記昇降位置検出センサにて検出される昇降位置が前記目標昇降位置設定手段にて設定された目標昇降位置になったことを判別する判別手段とから構成されている点にある。
【0021】
本発明の第4特徴によると、本発明の第1特徴と同様の作用に加えて、以下のような作用を奏する。
昇降制御手段が、中継搬送装置の昇降方向での昇降位置が目標昇降位置設定手段にて設定された目標昇降位置になるように、昇降駆動手段を作動させて中継搬送手段を昇降させるので、目標昇降位置設定手段による目標昇降位置を変更設定することにより、第2昇降位置を変更することができる。
【0022】
したがって、例えば、目標昇降位置設定手段をボリューム式のツマミで構成するなどして、第2昇降位置の変更設定操作の操作性を良くすることが可能となり、第2昇降位置の変更設定作業の作業性を向上させることができる荷役作業用の搬送装置を得るに至った。
【0023】
本発明の第5特徴は、本発明の第4特徴において、前記昇降指令手段が上昇指令及び下降指令を指令するように構成され、前記昇降制御手段が、前記昇降指令手段による上昇指令及び下降指令により前記中継搬送手段を上昇及び下降させるべく、前記昇降駆動手段を作動させるように構成され、前記目標昇降位置設定手段が、設定指令が指令されたときに前記昇降位置検出手段にて検出される昇降位置を目標昇降位置として記憶するように構成されている点にある。
【0024】
本発明の第5特徴によると、本発明の第4特徴と同様の作用に加えて、以下のような作用を奏する。
中継搬送手段が運搬車両の荷台との間で物品を移載するのに適切な高さに位置している状態で設定指令が指令されると、昇降位置検出手段にて検出される昇降位置が、目標昇降位置として記憶される。したがって、一旦、昇降指令手段による上昇指令及び下降指令により中継搬送手段を上昇及び下降させて、中継搬送手段を運搬車両の荷台との間で物品を移載するのに適切な高さに位置させた後は、目標昇降位置設定手段にて設定指令を指令して目標昇降位置を記憶しておくことで、昇降指令手段にて第2昇降位置への昇降を指令するだけで、中継搬送手段を運搬車両の荷台との間で物品を移載するのに適切な高さに位置させることができる。
【0025】
このように、本発明の第5特徴によると、中継搬送手段と運搬車両の荷台との間で物品を反復継続して移載する場合に、目標昇降位置設定手段にて設定指令を指令した後に行われる移載作業では、作業者は、簡単な操作により、運搬車両の荷台に物品を移載するのに適切な高さに中継搬送手段を昇降させることができるので、中継搬送手段と運搬車両の荷台との間で物品を反復継続して移載する場合の作業効率を向上させることができる荷役作業用の搬送装置を得るに至った。
【0026】
本発明の第6特徴は、本発明の第5特徴において、昇降制御手段が、昇降指令手段にて第2昇降位置への昇降が指令されて中継搬送手段を第2昇降位置に昇降させた状態において、昇降指令手段による上昇指令及び下降指令により中継搬送手段が昇降されたときには、その昇降手段による上昇指令及び下降指令に基づいて設定指令を目標昇降位置設定手段に指令するように構成されている点にある。
【0027】
本発明の第6特徴によると、本発明の第5特徴と同様の作用に加えて、以下のような作用を奏する。
昇降指令手段にて第2昇降位置への昇降が指令されて中継搬送手段が現在の設定による第2昇降位置に昇降したときに、運搬車両の荷台の高さに応じた適正な高さでない場合には、第2昇降位置を変更設定する必要があるが、この状態で、昇降指令手段による上昇指令及び下降指令により中継搬送手段を上昇及び下降させて、中継搬送手段の位置を変更して、荷台の高さに応じた適正な高さに位置させると、その昇降手段による上昇指令及び下降指令に基づいて設定指令が目標昇降位置設定手段に指令されるので、変更後の中継搬送手段の位置を新たな目標昇降位置として記憶させることができる。
【0028】
したがって、第2昇降位置を変更設定する場合に、昇降指令手段による上昇指令及び下降指令により、中継搬送手段を上昇及び下降させると同時に、変更した後の中継搬送手段の昇降位置を目標昇降位置として記憶させることができる。
【0029】
このように、本発明の第6特徴によると、第2昇降位置を変更設定する場合に、変更された後の中継搬送手段の昇降位置を目標昇降位置として記憶させる操作を省略することができ、第2昇降位置を迅速に変更設定することができる荷役作業用の搬送装置を得るに至った。
【0030】
本発明の第7特徴は、本発明の第4特徴において、目標昇降位置設定手段が、昇降指令手段にて第2昇降位置への昇降が指令されて中継搬送手段が第2昇降位置に昇降される回数に応じて、目標昇降位置を漸次上昇側又は下降側に自動的に修正するように構成されている点にある。
【0031】
本発明の第7特徴によると、本発明の第4特徴と同様の作用に加えて、以下のような作用を奏する。
昇降制御手段は、中継搬送手段が第2昇降位置に昇降される回数に応じて、目標昇降位置を漸次上昇側又は下降側に自動的に修正するので、中継搬送手段が第2昇降位置に昇降される回数が増えるに伴って、第2昇降位置への昇降が指令されたときに中継搬送手段が昇降する位置が、上昇側又は下降側に自動的に変化する。
【0032】
したがって、例えば、運搬車両へ物品をパレット単位で積み込む移載作業を行う場合や運搬車両からパレット単位で物品を卸す移載作業を行う場合のように移載作業回数に応じて積荷の荷重が増加又は減少して、運搬車両の荷台の高さが徐々に低下又は上昇することにより、第2昇降位置と運搬車両の荷台の高さとの間に許容範囲以上の高さの差が発生しうる場合等、中継搬送装置が第2昇降位置に昇降される回数が増えるに伴って運搬車両の荷台との間で物品を移載するのに適切な昇降位置が変化する場合に、わざわざ第2昇降位置の変更設定作業をしなくても、運搬車両の荷台の高さの変化に追従するように第2昇降位置が自動的に変更設定されるので、中継搬送装置が第2昇降位置に昇降したときに中継搬送装置が運搬車両の荷台との間で物品を移載するのに適切な昇降位置となる状態をできる限り多くの移載作業が行われる期間に亘って維持することができる。
【0033】
このように、本発明の第7特徴によると、複数回に亘って物品を運搬車両の荷台との間で移載することにより運搬車両の荷台の高さが次第に変化する場合に、第2昇降位置を変更設定する機会を減らして、より多くの回数に亘って中断することなく移載作業を繰返し行うことができ、もって、物品搬送箇所と運搬車両の荷台との間で物品を移載する場合の作業効率を向上させることができる荷役作業用の搬送装置を得るに至った。
【発明を実施するための最良の形態】
【0034】
〔第1実施形態〕
以下、本発明の荷役作業用の搬送装置の実施形態を図面に基づいて説明する。
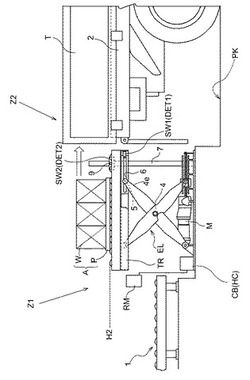
図1〜図3に示すように、製品Wとこれを積載するパレットPからなる物品Aを搬送する地上側ローラコンベヤ1が設けられた入出荷口に、本発明が適用された荷役作業用の搬送装置3が設けられている。
【0035】
搬送装置3は、地上側ローラコンベヤ1で物品Aが搬送されてくる物品搬送箇所として搬送箇所Z1と、物品Aを運搬する運搬車両としてのトラックTが停車位置PKに停車した状態における荷台2が位置する存在予定箇所としての移載対象箇所Z2との間に設けられている。
【0036】
搬送装置3は、中間搬送装置としてのローラコンベヤTRと、上下方向に伸縮自在なXリンク機構4を昇降用モータMの回転駆動により伸縮作動させてローラコンベヤTRを昇降駆動する昇降駆動手段としての昇降リンク装置ELとを備えている。
【0037】
図1及び図2に示すように、Xリンク機構4の上方側の端部のうち固定されていない端部4eが連結された連結部材には、端部4eに備えられた係合軸5が昇降リンク装置ELによるローラコンベヤTRの昇降に伴って摺動する摺動案内用の長穴6が設けられている。係合軸5の摺動方向における長穴6の長さにより昇降リンク装置ELの機械的な作動可能範囲が規制され、ローラコンベヤTRは、機械下限位置Hb(図1において実線で示された位置)から機械上限位置Ht(図1において仮想線で示された位置)まで昇降可能となっている。
【0038】
ローラコンベヤTRには、係合軸5が当接することによりオン作動する第1リミットスイッチSW1が設けられている。ローラコンベヤTRが下降するに伴って第1リミットスイッチSW1がオンすることにより、制御ボックスCBに内装された後述する昇降制御装置HCが、昇降用モータMの回転駆動を停止させ、ローラコンベヤTRが機械下限位置Hbに達する前にローラコンベヤTRの昇降を停止させる。
【0039】
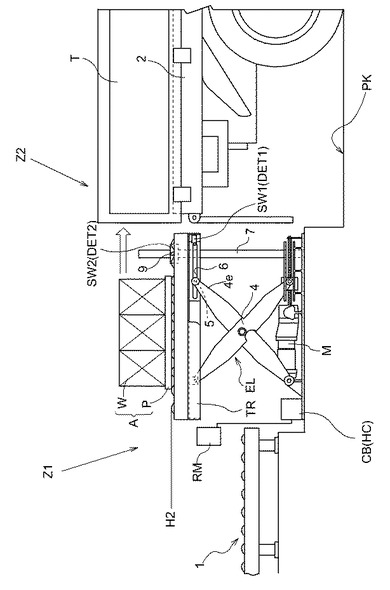
図1に示すように、第1リミットスイッチSW1は、ローラコンベヤTRの搬送面が地上側ローラコンベヤ1の搬送面と略一致する第1昇降位置としての搬送箇所用位置H1(図1において実線で示すローラコンベヤTRの位置)にローラコンベヤTRが昇降したときに、第1リミットスイッチSW1の当接部が係合軸5と当接してオンするように、長穴6の長手方向の適切な位置において長穴6の近傍に取り付けられている。なお、第1リミットスイッチSW1の取り付け位置は地上側ローラコンベヤ1の搬送面の高さに応じて決定される。
【0040】
本実施形態では、搬送装置3が、機械下限位置Hbと搬送箇所用位置H1と一致する状態で設置されているため、第1リミットスイッチSW1の長穴6に対する取り付け位置は、ローラコンベヤTRの機械下限位置Hbを規制する長穴6の端部に対応した位置となっている。つまり、ローラコンベヤTRが機械下限位置Hbに達すると、第1リミットスイッチSW1がオンとなり、昇降用モータMの回転駆動が停止されてローラコンベヤTRの昇降が停止される。
【0041】
このように、第1リミットスイッチSW1は、ローラコンベヤTRが、搬送箇所用位置H1に位置することを検出する第1昇降位置検出手段DET1として機能する。
【0042】
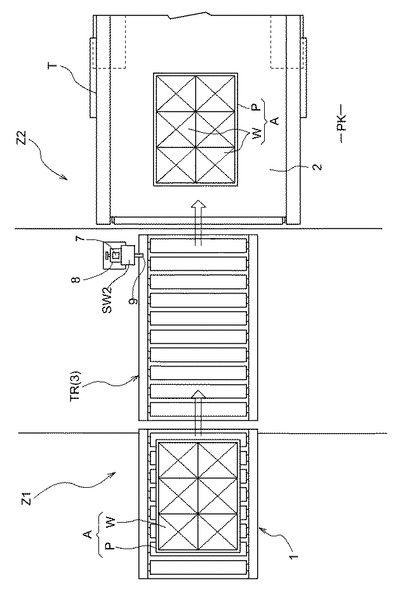
図1〜図3に示すように、搬送装置3が設置される床面における搬送装置3の側方箇所に、支持体としてのリミッタ取付棒7が、その長手方向を搬送装置3の昇降方向に沿わせた状態で立設されている。図3に示すように、リミッタ取付棒7には、リミッタ取付棒7に対して上下方向でスライド自在に取り付けられ、締め付けボルトの締め付けにより、リミッタ取付棒7における長手方向の任意の位置で位置保持可能に構成されたアタッチメント8が設けられ、このアタッチメント8に第2リミットスイッチSW2を固定させた状態で取り付けられている。
【0043】
そして、第2リミットスイッチSW2には、検出部分9が設けられており、ローラコンベヤTRが第2リミットスイッチSW2の取り付け高さに対応する高さまで昇降したときに、検出部分9がローラコンベヤTRに当接して、ローラコンベヤTRを検出できるようになっている。
【0044】
本実施形態では、リミッタ取付棒7を角棒で構成し、アタッチメント8にリミッタ取付棒7の水平断面形状に対応した形状の取付係合部を形成してあるので、リミッタ取付棒7を回転中心としたアタッチメント8の平面視における姿勢変化が規制され、これにより、第2リミットスイッチSW2の取り付け高さを変更設定する場合に、平面視におけるローラコンベヤTRと第2リミットスイッチSW2との相対位置関係が図3に示す状態に維持されるようになっている。
【0045】
つまり、第2リミットスイッチSW2は、その設置高さに対応する高さにローラコンベヤTRが位置するときにローラコンベヤTRを検出する状態で且つ地上側に設置したリミッタ取付棒7に対して上下方向での支持位置を変更調整自在に取り付けられている。
【0046】
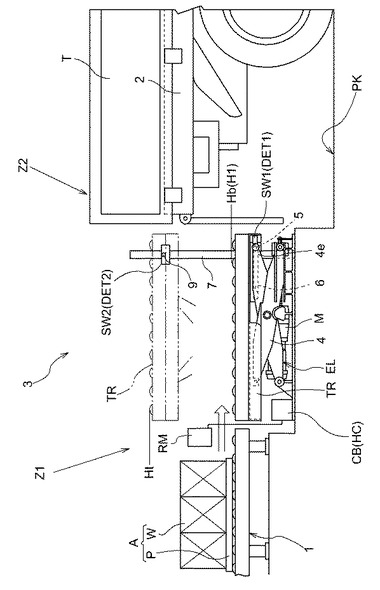
したがって、ローラコンベヤTRが、トラックTの荷台2との間で物品Aを移載するのに適切な昇降高さである荷台用位置H2(図2に示された位置)に位置するときに、第2リミットスイッチSW2がオンするような高さに第2リミットスイッチSW2の上下取り付け高さを変更設定することにより、第2リミットスイッチSW2により荷台用位置H2を検出することができる。
【0047】
このように、第2リミットスイッチSW2は、トラックTの荷台2の高さに応じて変更設定自在な第2昇降位置としての荷台用位置H2にローラコンベヤTRが位置することを検出する第2昇降位置検出手段DET2として機能する。
【0048】
搬送装置3は、前述の昇降制御装置HCを昇降リンク装置ELの作動を制御する昇降制御手段として備えており、昇降制御装置HCを内装する制御ボックスCBには、接続端子を介して配線ケーブルにより、第1及び第2リミットスイッチSW1,SW2や、昇降用モータMや、後述する昇降指令手段としての操作リモコンRMが備える各指令用スイッチ等の入出力機器が接続されている。
【0049】
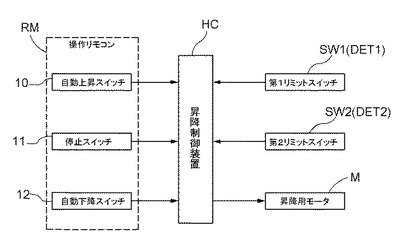
昇降制御装置HCは、マイコン等で構成され、マイコンが実行するプログラムにより昇降用モータMに対する出力が制御される。昇降制御装置HCに接続される入出力機器を制御ブロック図で示すと図4のようになる。図4に示すように、昇降制御装置HCには、上述の第1リミットスイッチSW1及び第2リミットスイッチSW2、操作リモコンRMに設けられた自動上昇スイッチ10、停止スイッチ11、及び、自動下降スイッチ12、並びに、昇降用モータMが接続されている。
【0050】
これにより、第1リミットスイッチSW1及び第2リミットスイッチSW2が出力する検出情報及び、操作リモコンRMに設けられた各指令用スイッチ10〜12を操作することによりにより出力される各種の指令情報が、昇降制御装置HCに入力され、また、昇降制御装置HCによる制御情報が昇降用モータMに対して出力される。
【0051】
自動上昇スイッチ10、停止スイッチ11、及び、自動下降スイッチ12は、非操作状態に復帰付勢された押ボタンスイッチにて構成されている。自動上昇スイッチ10が押し操作されると、ローラコンベヤTRを荷台用位置H2まで自動的に昇降させる自動上昇指令が指令され、自動下降スイッチ12が押し操作されると、ローラコンベヤTRを搬送箇所用位置H1まで自動的に昇降させる自動下降指令が指令され、停止スイッチ12が押し操作されると、昇降しているローラコンベヤTRを停止させる停止指令が指令される。
【0052】
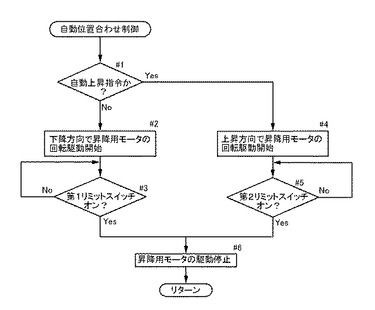
以下、マイコンが実行する自動位置合わせ制御プログラムによる昇降制御装置HCの制御動作について図5のフローチャートに基づいて説明する。
【0053】
図5に示すように、制御装置HCは、ステップ#1で自動上昇指令であるか自動下降指令であるかを判別し、自動下降指令であれば、ステップ#2で昇降用モータMの回転駆動を下降方向で開始させ、ステップ#3で、第1リミットスイッチSW1がオンとなって、ローラコンベヤTRが搬送箇所用位置H1まで昇降したことが検出されると、ステップ#6で昇降用モータMの駆動が停止される。ステップ#1で自動上昇指令であると判別されると、ステップ#4で昇降用モータMの回転駆動を上昇方向で開始させ、ステップ#5で、第2リミットスイッチSW2がオンとなって、ローラコンベヤTRが荷台用位置H2まで昇降したことが検出されると、ステップ#6で昇降用モータMの駆動が停止される。
【0054】
つまり、昇降制御装置HCは、操作リモコンRMにて搬送箇所用位置H1への自動下降指令が指令されると、ローラコンベヤTRを搬送箇所用位置H1に昇降させ、且つ、操作リモコンRMにて荷台用位置H2への自動上昇指令が指令されると、ローラコンベヤTRを荷台用位置H2に昇降させるべく、第1リミットスイッチSW1及び第2リミットスイッチSW2の検出情報に基づいて昇降リンク装置ELを作動させるように構成されている。
【0055】
なお、図5のフローチャートに示す処理は、自動上昇スイッチ10又は自動下降スイッチ12の押し操作により指令される自動上昇指令や自動下降指令により実行が開始されるものであり、この処理の実行中に、つまり、ローラコンベヤTRが搬送箇所用位置H1又は荷台用位置H2に向って自動昇降している最中に、停止スイッチ11が押し操作されて停止指令が指令されると、割込み処理により昇降用モータの駆動が停止される。
【0056】
以上に説明した本実施形態の構成によると、作業者は、第2リミットスイッチSW2が取り付けられたアタッチメント8のリミッタ取付棒7における取り付け位置をトラックTの荷台2の高さに応じて変更設定することで、複数の物品Aについて積み込み又は積み卸し作業を繰り返し行う場合に、自動上昇スイッチ10及び自動下降スイッチ11をいわゆるワンショット操作するだけで、簡単に、ローラコンベヤTRを、搬送箇所用位置H1と荷台用位置H2との間で往復昇降させることができ、物品Aの積み込み又は積み卸し作業を良好に行うことができる。
【0057】
〔第2実施形態〕
本実施形態は、上述した第1実施形態と、第2昇降位置検出手段DET2の構成及び昇降制御手段の構成(具体的には、昇降制御手段としての昇降制御装置HCが実行する自動昇降位置合わせ制御処理の実行内容)が異なるほかは、同等の構成であるので、これらについて以下に説明する。
【0058】
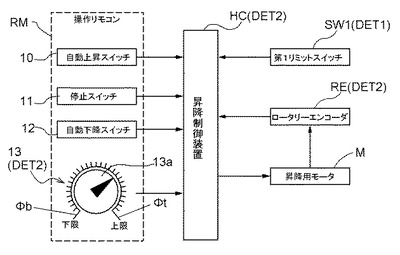
本実施形態では、図6に示すように、第2リミットスイッチSW2を設けずに、昇降用モータMの回転駆動量を検出して、昇降用モータMの回転駆動量に比例した数のパルス信号を出力するするロータリエンコーダREを昇降制御装置HCに接続して設けてある。昇降制御装置HCは、変数として設けられた記憶部に格納された昇降カウントCの値をロータリエンコーダREが出力するパルス数だけ加算及び減算するので、昇降カウントCの値は、ローラコンベヤTRの昇降位置を示す値となっている。つまり、ロータリエンコーダREは、昇降位置検出センサとして機能する。
【0059】
なお、昇降カウントCの値とローラコンベヤTRの昇降位置との関係は線形関係を為しており、その特性はロータリエンコーダREの分解能に基づいて決定することになるが、昇降カウントCの値は、搬送装置3の設置時において、ローラコンベヤTRが機械下限位置Hbに位置する状態でリセットされるため、ローラコンベヤTRが機械下限位置Hbに位置する状態では、昇降カウントCの値は「0」となる。
【0060】
図6に示すように、操作リモコンRMに、昇降制御装置HCに接続されたボリューム型設定器13が設けられている。ボリューム型設定器13は、下限操作位置Φbから上限操作位置Φtまでに亘る任意の操作位置において設定保持可能に設けられた左右回転操作自在のつまみ部13aと、このつまみ部13aの操作位置を検出するポテンショメータを備えて構成されている。つまみ部13aを下限操作位置Φbから上限操作位置Φtの間の何れかの操作位置に操作した状態で、自動上昇スイッチ10を押し操作すると、昇降制御装置HCが、上述のポテンショメータの検出情報に基づいて、自動位置合わせ制御における目標昇降位置に対応する昇降カウントCの値である目標カウント値Cmを、制御パラメータとして記憶部に記憶する。つまり、ボリューム型設定器13は、目標昇降位置設定手段として機能する。
【0061】
つまみ部13aの操作位置に基づいて記憶される目標カウント値Cmは、つまみ部13aの操作位置と線形関係を為してなり、つまみ部13aが下限操作位置Φbに設定操作された場合には、ローラコンベヤTRが機械下限位置Hbに位置するときの昇降カウントCの値(以下、下限昇降カウント値Cbという)が設定され、つまみ部13aが上限操作位置Φtに設定操作された場合には、ローラコンベヤTRが機械上限位置Htに位置するときの昇降カウントCの値(以下、上限昇降カウント値Ctという)が設定され、つまみ部13aが下限操作位置Φbと上限操作位置Φtとの間の操作位置に設定操作された場合は、つまみ部13aの操作位置に対応する値が下限昇降カウント値Cb〜上限昇降カウント値Ctの範囲内で設定される。
【0062】
昇降制御装置HCは、自動上昇スイッチ10又は自動下降スイッチ12が押し操作されると、以下に説明する自動位置合わせ制御処理用のプログラムを実行して、ロータリエンコーダREのカウント値Cがボリューム型設定器13の設定位置に基づいて記憶された目標昇降カウントCmと一致すること、つまり、ロータリエンコーダREにて検出されるローラコンベヤTRの昇降位置が目標昇降位置となったことを判別するようになっている。つまり、昇降制御装置HCが判別手段として機能する。
【0063】
このように、本実施形態では、ボリューム型設定器13の設定位置を、下限操作位置Φbから上限操作位置Φtまでの範囲において、機械下限位置Hbから機械上限位置Htの範囲における荷台用位置H2の位置に対応する位置に変更設定することにより、自動位置合わせ制御における目標昇降位置を変更することができ、昇降制御装置HCは、ロータリエンコーダREにて検出されるローラコンベヤTRの昇降位置が、ボリューム型設定器13の設定位置により設定される目標昇降位置に位置するかどうかを判別する。
【0064】
つまり、本実施形態では、第2昇降位置検出手段DET2が、ロータリエンコーダRE、ボリューム型設定器13、昇降制御装置HCにて構成されている。
【0065】
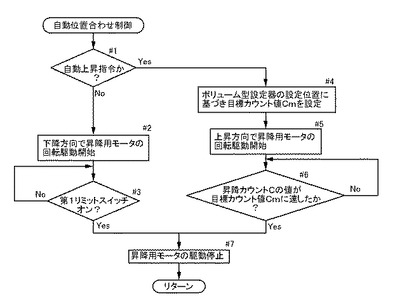
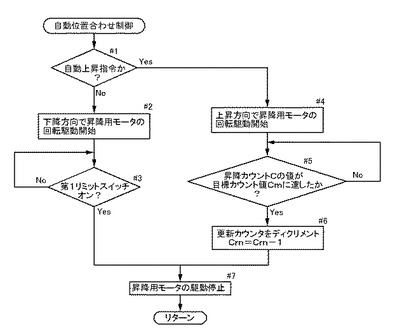
以下、昇降制御装置HCのマイコンが実行する自動位置合わせ制御処理用のプログラムによる昇降制御装置HCの制御動作について図7のフローチャートに基づいて説明する。
【0066】
図7に示すように、昇降制御装置HCは、ステップ#1で自動上昇指令であるか自動下降指令であるかを判別し、自動下降指令であれば、ステップ#2で昇降用モータMの回転駆動を下降方向で開始させ、ステップ#3で、第1リミットスイッチSW1がオンとなって、ローラコンベヤTRが搬送箇所用位置H1まで昇降したことが検出されると、ステップ#7で昇降用モータMの駆動が停止される。ステップ#1で自動上昇指令であると判別されると、ステップ#4でボリューム型設定器13の設定位置に基づいて目標昇降カウントCmが記憶設定される。ステップ#5で昇降用モータMの回転駆動を上昇方向で開始させ、ステップ#6で、昇降カウントCの値が目標カウント値Cmに達して、ローラコンベヤTRが荷台用位置H2まで昇降したと判別されると、ステップ#7で昇降用モータMの駆動が停止される。
【0067】
つまり、昇降制御装置HCは、操作リモコンRMにて搬送箇所用位置H1への自動下降指令が指令されると、ローラコンベヤTRを搬送箇所用位置H1に昇降させ、且つ、操作リモコンRMにて荷台用位置H2への自動上昇指令が指令されると、ローラコンベヤTRを荷台用位置H2に昇降させるべく、第1リミットスイッチSW1で構成された第1昇降位置検出手段DET1の検出情報、並びに、ロータリエンコーダRE、ボリューム型設定器13、昇降制御装置HCで構成された第2昇降位置検出手段DET2の検出情報に基づいて昇降リンク装置ELを作動させるように構成されている。
【0068】
なお、一旦、自動上昇スイッチ10が押し操作されて、ローラコンベヤTRがボリューム型設定器13により設定された荷台用位置H2に昇降した状態において、ローラコンベヤTRの高さが、物品Aを荷台2との間で移載するのに適した高さに不足する場合には、ボリューム型設定器13を上限操作位置Φt側に相当分回転操作させた上で、再度自動上昇スイッチ10を押し操作することにより、ローラコンベヤTRを荷台用位置H2として適切な高さに上昇させることができる。
【0069】
また、同様に、一旦、自動上昇スイッチ10が押し操作されて、ローラコンベヤTRがボリューム型設定器13により設定された荷台用位置H2に昇降した状態において、ローラコンベヤTRの高さが、物品Aを荷台2との間で移載するのに適した高さを越える場合には、ボリューム型設定器13を下限操作位置Φb側に相当分回転操作させた上で、再度、自動上昇スイッチ10を押し操作することにより、ローラコンベヤTRを荷台用位置H2として適切な高さに下降させることができる
【0070】
〔第3実施形態〕
本実施形態は、上述した第2実施形態と、昇降指令手段の構成、及び、第2昇降位置検出手段DET2を構成する目標昇降位置設定手段の構成、並びに、昇降制御手段の構成(具体的には、昇降制御手段としての昇降制御装置HCが実行する処理の内容)が異なるほかは、同等の構成であるので、これらについて以下に説明する。
【0071】
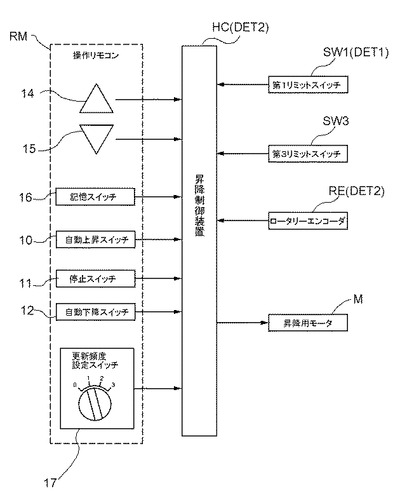
本実施形態では、図8に示すように、押し操作されてオン状態となっている間継続して上昇指令及び下降指令を指令する手動上昇スイッチ14及び手動下降スイッチ15、押し操作されてオン状態となると、ローラコンベヤTRが位置する昇降位置を、自動昇降位置合わせ制御における目標昇降位置として昇降制御装置HCの記憶部に記憶させる記憶指令を指令する記憶スイッチ16、自動昇降位置合わせ制御による昇降回数に応じた目標昇降位置の更新頻度を設定する更新頻度設定スイッチ17が操作リモコンRMに設けられ、制御ボックスCBに接続された配線ケーブルを介して昇降制御手段としての昇降制御装置HCに接続されている。なお、手動上昇スイッチ14、手動下降スイッチ15及び記憶スイッチ16は非操作位置に復帰付勢された押しボタンスイッチで構成されており、非操作位置ではオフ状態となっている。
【0072】
このように、昇降指令手段としての操作リモコンRMが上昇指令及び下降指令を指令するように構成されている。
【0073】
また、図1(本実施形態においては、リミッタ取付棒7、アタッチメント8、第2リミットセンサSW2は備えていない。)に示すローラコンベヤTRの長穴6の端部に、ローラコンベヤTRが機械上限位置Htに位置することを検出する第3リミットスイッチSW3が設けられ、制御ボックスCBに接続された配線ケーブルを介して昇降制御手段としての昇降制御装置HCに接続されている。
【0074】
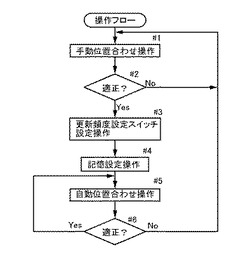
本実施形態の搬送装置3を使用する場合の作業者の作業手順の概略を図9に示すフローチャートに基づいて説明する。まず、作業者は、ステップ#1の手動位置合わせ操作を行う。手動位置合わせ操作では、操作リモコンRMの手動上昇スイッチ14や手動下降スイッチ15をオン状態に維持して上昇指令や下降指令を継続して指令する。上昇指令や下降指令が指令されると、昇降制御装置HCは後述する図10のフローチャートに示す手動位置合わせ制御処理を実行し、手動上昇スイッチ14や手動下降スイッチ15による上昇指令や下降指令が指令されている間だけ昇降リンク装置ELを作動させローラコンベヤTRを上昇または下降させる。
【0075】
ステップ#2で、作業者は、停止した状態のローラコンベヤTRの昇降位置が、荷台用位置H2に適切に位置しているか確認し、修正が必要であれば再度、手動上昇スイッチ14や手動下降スイッチ15による手動位置合わせ操作を行う。このように、必要に応じていわゆるインチング操作による微調整を行ってローラコンベヤTRを荷台用位置H2に適切に位置させる。
【0076】
ステップ#3で作業者は、操作リモコンRMの更新頻度設定スイッチ17を0回〜3回のうちから所望の設定値に選択設定する。更新頻度設定スイッチ17は、詳しくは後述するが、ローラコンベヤTRが荷台用位置H2に昇降される回数に応じて、一旦記憶設定された目標昇降位置を漸次上昇又は下降させる態様で変化させる場合の頻度を設定するものである。例えば、更新頻度設定スイッチ17により更新頻度として「2回」が選択設定されると、ローラコンベヤTRが荷台用位置H2に2回昇降した時点で目標昇降位置がそれまでのものより低い高さを示すものに変更される。
【0077】
ステップ#1〜ステップ#3の操作が完了した状態で、作業者は、ステップ#4の記憶設定操作を行う。具体的には、操作リモコンRMに設けられた記憶スイッチ16を押し操作する。これにより、記憶スイッチSW5がオン状態になり、記憶指令が指令され、昇降制御装置HCが後述する図11のフローチャートに示す目標位置設定処理を実行する。
【0078】
その後、作業者は、ステップ#5の自動位置合わせ操作を繰り返し行って、複数の物品AについてトラックTの荷台2に対する移載作業を繰り返し行う。
【0079】
具体的には、例えば、移載作業として物品の積み込み作業を行う場合、作業者は、搬送箇所用位置H1に位置するローラコンベヤTR上に物品Aを載置し、自動上昇スイッチ10を押し操作する。これにより、自動上昇スイッチ10がオン状態となり、自動上昇指令が指令され、昇降制御装置HCが後述する図12のフローチャートに示す自動位置合わせ処理を実行し、搬送箇所用位置H1に位置するローラコンベヤTRを荷台用位置H2に上昇させる。この状態で、作業者は、物品AをトラックTの荷台2に積み込む。
【0080】
ローラコンベヤTRに物品Aが載置されない状態となったら、作業者は、自動下降スイッチ12を押し操作する。これにより、自動下降スイッチ12がオン状態となり、自動下降指令が指令され、昇降制御装置HCが図12の自動位置合わせ制御処理を実行し、荷台用位置H2に位置するローラコンベヤTRを搬送箇所用位置H1に下降させる。この状態で、作業者は、次の物品AをローラコンベヤTRに載置する。
【0081】
そして、全ての物品AをトラックTの荷台2に積み込むまで、自動上昇スイッチ10及び自動下降スイッチ12のいわゆるワンショット操作により、ローラコンベヤTRを搬送箇所用位置H1と荷台用位置H2との間で往復昇降させ、積み込み作業を繰り返し行う。
【0082】
この間、ステップ#6に示すように、作業者は、自動上昇スイッチ10により荷台用位置H2にローラコンベヤTRを自動的に上昇させたときに、自動上昇が完了したときのローラコンベヤTRの昇降位置が、荷台用位置H2に適切に位置しているかどうかを確認する。そして、荷台用位置H2に昇降したローラコンベヤTRが移載作業に適した位置として許容される範囲外に位置しているときには、再び、ステップ#1の手動位置合わせ操作を行って、ローラコンベヤTRを荷台用位置H2に適切に位置させ、改めてステップ#3の更新頻度設定スイッチ17の設定操作やステップ#4の記憶設定操作を行って、自動上昇スイッチ10によりローラコンベヤTRが荷台用位置H2に適切に自動的に昇降するようにする。
【0083】
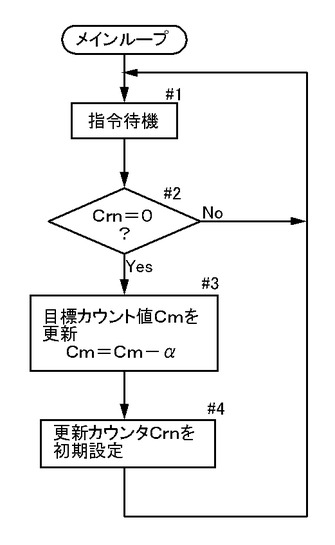
作業者が操作リモコンRMを操作すると昇降制御装置HCが備えるマイコンにより実行される前述の各種処理(手動位置合わせ制御処理、目標位置設定処理、自動位置合わせ制御処理)について、図10〜図12に示されたフローチャートに基づいて以下に説明する。なお、昇降制御装置HCは、起動されると図13のフローチャートに示すメインループ処理を実行する。そして、メインループ処理のステップ#1において指令待機状態となっているときに、作業者により操作リモコンRMが操作されると、実行すべき処理を判別した上で該当する処理を実行する。
【0084】
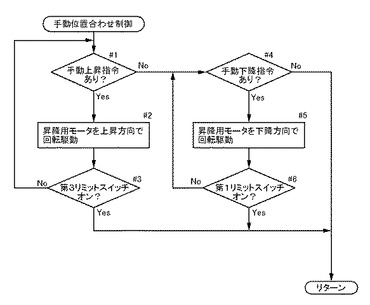
図10のフローチャートに示すように、手動位置合わせ制御処理では、ステップ#1で手動上昇指令が指令されているか否かを判別し、指令されていればステップ#2で昇降用モータMを上昇方向で回転駆動させる。ステップ#3で第3リミットスイッチSW3がオンと判別されるまで、つまり、ローラコンベヤTRが機械上限位置Htに位置することが検出されるまで、ステップ#1及びステップ#2の処理が繰り返されて手動昇降指令に基づく昇降用モータMの駆動が継続される。
【0085】
ステップ#1で手動上昇指令が指令されていないと判別されると、ステップ#4で手動下降指令が指令されているか否かを判別し、指令されていればステップ#5で昇降用モータMを下降方向で回転駆動させる。ステップ#6で第1リミットスイッチSW3がオンと判別されるまで、つまり、ローラコンベヤTRが機械下限位置Hbに位置することが検出されるまで、ステップ#4及びステップ#5の処理が繰り返されて手動昇降指令に基づく昇降用モータMの駆動が継続される。
【0086】
このように、手動位置合わせ制御処理は、一旦発生した手動上昇指令又は手動下降指令により処理が開始され、これらの指令が途絶えるまで処理が継続し、ローラコンベヤTRの上昇又は下降が継続する。そして、これらの指令が途絶えるか、若しくは、ローラコンベヤTRが機械上限位置Ht又は機械下限位置Hbにまで達すると、昇降用モータMの駆動が停止され、ローラコンベヤTRの昇降が停止されて、手動位置合わせ制御処理は終了する。
【0087】
つまり、本実施形態においては、昇降制御装置HCは、操作リモコンRMによる上昇指令及び下降指令によりローラコンベヤTRを上昇及び下降させるべく、昇降リンク装置ELを作動させるように構成されている。
【0088】
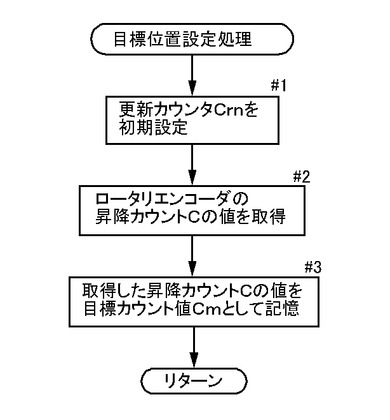
図11のフローチャートに示すように、目標位置設定処理では、ステップ#1で、更新頻度設定スイッチ17の設定値情報が昇降制御装置HCに取り込まれ、更新頻度設定スイッチ17の設定値が更新カウンタCrnの初期値として設定される。つまり、ステップ#1の処理により更新カウンタCrnの値が初期設定される。
【0089】
なお、詳しくは後述するが、更新カウンタCrnは、図12の自動位置合わせ制御処理で荷台用位置H2への昇降が行われるとディクリメントされるダウンカウンタであり、図13のメインループのステップ#2でその値がゼロチェックされ、目標カウント値Cmの更新処理(図13のステップ#3)を実行するトリガとして使用される。
【0090】
図11の目標位置設定処理のステップ#2で、当該処理が実行されるときのロータリエンコーダREの昇降カウントCの値を取得し、ステップ#3でその値を目標カウントCの値mとして記憶部に記憶し、目標位置設定処理を終了する。
【0091】
このように、本実施形態においては、操作リモコンRMにより設定指令が指令されると、昇降制御装置HCが目標位置設定処理を実行して、ロータリエンコーダREにて検出されるローラコンベヤTRの昇降位置を示す昇降カウントCの値が、目標昇降位置を示す目標カウント値Cmとして記憶されるように構成されているので、昇降制御装置HCは目標昇降位置設定手段として機能する。
【0092】
図12のフローチャートに示すように、自動位置合わせ制御処理では、ステップ#1で、自動上昇指令か自動下降指令か判別され、自動下降指令であれば、ステップ#2で昇降用モータMの下降方向での回転駆動を開始させ、ステップ#3で第1リミットスイッチSW1がオンして、ローラコンベヤTRが搬送箇所用位置H1に昇降したことが検出されるまで、昇降用モータMの下降方向への回転駆動状態が維持された状態で、第1リミットスイッチSW1の検出情報が監視される。ステップ#3で第1リミットスイッチSW1がオンして、ローラコンベヤTRが搬送箇所用位置H1に昇降したことが検出されるとステップ#7で昇降用モータMの下降方向への回転駆動が停止され、ローラコンベヤTRの昇降が停止される。
【0093】
ステップ#1で自動上昇指令であると判別されれば、ステップ#4で昇降用モータMの上昇方向での回転駆動を開始させ、ステップ#5で昇降カウントCの値が目標カウント値Cmに達したか否か判別され、昇降カウントCの値が目標カウント値Cmに一致するまで、昇降用モータMの上昇方向への回転駆動が維持された状態で、昇降カウントCの値が監視される。
【0094】
つまり、昇降制御装置HCは、昇降位置検出センサとしてのロータリカウンタREにて検出されるローラコンベヤTRの昇降位置を示す昇降カウントCの値が、目標設定処理にて設定された目標昇降位置を示す目標カウント値Cmになったことを判別するので、昇降制御装置HCは判別手段として機能する。
【0095】
ステップ#5で、昇降カウントCの値が目標カウント値Cmに達したと判別されると、ステップ#6で更新カウンタCrnを「1」だけディクリメントした上で、ステップ#7で昇降用モータMの上昇方向への回転駆動が停止され、ローラコンベヤTRの昇降が停止される。
【0096】
このように、自動位置合わせ制御処理は、一旦発生した自動上昇指令又は自動下降指令により処理が開始され、荷台用位置H2又は搬送箇所用位置H1に昇降するまで処理が継続し、ローラコンベヤTRの上昇又は下降が継続する。そして、ローラコンベヤTRが荷台用位置H2又は搬送箇所用位置H1に達すると、昇降用モータMの駆動が停止され、ローラコンベヤTRが停止されて、自動位置合わせ制御処理は終了する。
【0097】
なお、ローラコンベヤTRが自動昇降している最中に操作リモコンRMの停止スイッチ11が押し操作されて停止指令が指令されると、割り込み処理が発生して、昇降用モータMの回転駆動が停止されるとともに、自動位置合わせ制御処理が強制終了する。
【0098】
図13のフローチャートに示すように、メインループのステップ#2で、上述の自動位置合わせ制御処理のステップ#6でディクリメントされた更新カウンタCrnの値が「0」であるか否かがチェックされ、自動位置合わせ制御によりローラコンベヤTRが荷台用位置H2へ設定された更新頻度回数だけ昇降した結果、更新カウンタCrnの値が「0」までディクリメントされた場合には、昇降制御装置HC内部で設定指令が発生してステップ#3の処理が実行され、目標カウント値Cmの値が規定値αだけ減少するように更新設定され、ステップ#4で更新カウンタCrnの値が更新頻度設定スイッチ17により設定された値に再び初期設定される。
【0099】
このように、目標位置設定処理が実行されて、目標カウント値Cmが初期設定されてから、更新頻度設定スイッチ17により設定された値が示す回数だけ、操作リモコンRMの自動上昇スイッチ10により自動位置合わせ制御処理が実行されてローラコンベヤTRが荷台用位置H2に昇降すると、昇降制御装置HC内部で設定指令が発生して、目標カウント値Cmが減少変化するように更新設定される。
【0100】
その後、さらに、更新頻度設定スイッチ17により設定された値が示す回数だけ、操作リモコンRMの自動上昇スイッチ10により自動位置合わせ制御処理が実行されてローラコンベヤTRが荷台用位置H2に昇降すると、昇降制御装置HC内部で設定指令が発生して、目標カウント値Cmがさらに減少変化するように再び更新設定される。
【0101】
つまり、本実施形態においては、昇降制御装置HCが、ローラコンベヤTRが荷台用位置H2に昇降される回数に応じて目標昇降位置を漸次下降させる態様で、設定指令を目標昇降位置設定手段に指令して目標昇降位置を変化させるように構成されている。
【0102】
なお、更新頻度設定スイッチ17により「0」が設定された場合は、図11の目標位置設定処理のステップ#1で更新カウンタCrnの初期値が「0」に設定されるので、自動位置合わせ制御処理のステップ#6では更新カウンタCrnが初期値「0」からディクリメントされる。このため、更新カウンタCrnは、自動上昇指令に基づく自動位置合わせ制御処理の実行回数に伴って負の値で減少変化するため、メインループのステップ#3の処理が実行されることはなく、目標カウント値Cmは最初に記憶スイッチ16を押し操作して記憶させた値が維持される。したがって、トラックTの荷台2から複数の物品Aを積み卸す移載作業などのように、自動位置合わせ操作を繰り返し行って複数の物品Aの移載を行うと荷台2の高さが上昇し荷台用位置H2が漸次上昇変化することが考えられる場合は、更新頻度設定スイッチ17を「0」に設定しておけばよい。
【0103】
〔別実施形態〕
以下、別実施形態を列記する。
【0104】
(1)上記各実施形態では、第1昇降位置検出手段DET1をリミットスイッチにて構成したものを例示したが、これに限らず、例えば、光センサやロータリエンコーダ等を用いて構成してもよく、第1昇降位置検出手段DET1の具体的構成は種々変更可能である。また、昇降駆動手段を昇降リンク装置ELにて構成されたものを例示したが、これに限らず、昇降駆動手段の具体的構成は種々変更可能である。
【0105】
(2)上記各実施形態では、中継搬送装置をローラコンベヤTRにより構成されたものを例示したが、これに限らず、例えば、搬送機能を備えずに物品を載置支持するだけの平滑な鉄板により構成してもよく、中継搬送装置の具体的構成は種々変更可能である。
【0106】
(3)上記各実施形態では、物品搬送箇所として、入出荷口に向って物品Aを搬送する地上側ローラコンベヤ1の入出荷口側端部1eが位置する箇所であるものを例示したが、これに限らず、ハンドリフトを用いて作業者が中継搬送装置の上方まで物品Aを搬送してその位置でハンドリフトを抜き取って物品Aを載置する場合には、物品搬送箇所としては、ハンドリフトが中継搬送装置の手前で地上側に位置する箇所に相当するものであり、また、物品Aがキャスター付きの収納容器であって作業者が中継搬送装置の上方まで物品Aを搬送して載置する場合には、物品搬送箇所としては、中継搬送装置の手前で地上側に位置する箇所に相当するものであるといったように、物品搬送箇所としては地上側に位置する箇所であって、荷役作業用の搬送装置の近傍であれば種々の定義が可能である。
【0107】
(4)上記各実施形態では、昇降指令手段が制御ボックスCBにケーブル接続された有線式の操作リモコンRMにて構成されたものを例示したが、これに限らず、無線式の操作リモコンにて構成する等、昇降指令手段の具体的構成は種々変更可能である。
【0108】
(5)上記各実施形態では、運搬車両をトラックTにて構成したものを例示したが、これに限らず、例えば、ハッチバック式の乗用車で構成する等、運搬車両の具体的構成は種々変更可能である。
【0109】
(6)上記各実施形態では、第1昇降位置としての搬送箇所用位置H1と第2昇降位置としての荷台用位置H2との上下方向の相対位置関係として、搬送箇所用位置H1が荷台用位置H2の上方に位置するようなものを例示したが、これとは逆に荷台用位置H2が搬送箇所用位置H1の上方に位置するようなものであってもよい。
【0110】
(7)上記第1実施形態及び第2実施形態において、昇降指令手段としての操作リモコンRMに、押し操作している間だけローラコンベヤTRを上昇させる上昇指令を指令する手動上昇指令ボタン、及び、押し操作している間だけローラコンベヤTRを下降させる下降指令を指令する手動下降指令ボタンを設け、昇降制御装置HCを、上昇指令又は下降指令が指令されると、上昇指令又は下降指令が指令されている間だけローラコンベヤTRを上昇又は下降させるべく昇降リンク装置ELを作動させる手動昇降制御処理を実行するように構成してもよい。
【0111】
(8)上記第2実施形態及び第3実施形態では、ローラコンベヤTRの昇降位置を検出する昇降位置検出センサを、ロータリエンコーダREにて構成したものを例示したが、搬送装置3が設置された地上側に設置され、ローラコンベヤTRの下面に設けられた反射板までの距離を測距する反射式のレーザ測距計により構成したもの等、昇降位置検出センサの具体構成は種々変更可能である。
【0112】
(9)上記第1実施形態では、第2昇降位置検出手段としての検出センサが、第2リミットスイッチSW2にて構成されたものを例示したが、これに限らず、光センサにて構成する等、検出センサの具体的構成は種々変更可能である。
【0113】
(10)上記第1実施形態では、第2昇降位置検出手段を、リミッタ支持棒7に検出センサとしての第2リミットスイッチSW2が、リミッタ支持棒7に対する支持位置を昇降自在に設けられたものにより構成されたものを例示したが、これに代えて、ローラコンベヤTRに一体的に昇降するように設けられた検出センサとしての第2リミットスイッチSW2と、リミッタ支持棒7に対する支持位置を変更調整自在に取り付けられ、第2リミットスイッチSW2が検出作用するリミッタ部材とで構成されたものでもよい。
【0114】
(11)上記第2実施形態では、目標昇降位置設定手段が、ボリューム型設定器13で構成されたものを例示したが、これに代えて、テンキーパットを備えた数値入力装置等で構成されたものでよい。
【0115】
(12)上記第3実施形態では、昇降制御装置HCが、ローラコンベヤTRが荷台用位置H2に昇降される回数に応じて目標昇降位置を漸次下降させる態様で、設定指令を目標昇降位置設定手段に指令して目標昇降位置を変化させるように構成されたものを例示したが、これに代えて、昇降制御装置HCが、ローラコンベヤTRが荷台用位置H2に昇降される回数に応じて目標昇降位置を漸次上昇させる態様で、設定指令を目標昇降位置設定手段に指令して目標昇降位置を変化させるように構成されたものでもよい。また、積み込み作業時と積み卸し作業時とで使い分けが可能なように、移載種別設定スイッチを設け、このスイッチの切換え操作により上記何れかの態様で目標昇降位置が変化するように選択可能に構成してもよい。
【0116】
(13)上記第3実施形態において目標カウント値Cmを更新設定する場合の規定値αは変更設定可能なものであってもよい。
【図面の簡単な説明】
【0117】
【図1】搬送装置のローラコンベヤが搬送箇所用位置に位置する状態を示す側面図
【図2】搬送装置のローラコンベヤが荷台用位置に位置する状態を示す側面図
【図3】搬送装置の設置位置を示す平面図
【図4】第1実施形態における制御構成のブロック図
【図5】第1実施形態における自動位置合わせ制御のフローチャート
【図6】第2実施形態における制御構成のブロック図
【図7】第2実施形態における自動位置合わせ制御のフローチャート
【図8】第3実施形態における制御構成のブロック図
【図9】第3実施形態における作業者の操作手順を示すフローチャート
【図10】第3実施形態における手動位置合わせ制御のフローチャート
【図11】第3実施形態における目標位置設定処理のフローチャート
【図12】第3実施形態における自動位置合わせ制御のフローチャート
【図13】第3実施形態におけるメインループのフローチャート
【符号の説明】
【0118】
A 物品
T 運搬車両
Z1 物品搬送箇所
Z2 存在予定箇所
TR 中継搬送装置
EL 昇降駆動手段
DET1 第1昇降位置検出手段
DET2 第2昇降位置検出手段
RE 昇降位置検出センサ
Cm 目標昇降位置
HC 昇降制御手段
RM 昇降指令手段
H1 第1昇降位置
H2 第2昇降位置
2 荷台
3 搬送装置
7 支持体
13 目標昇降位置設定手段
【技術分野】
【0001】
本発明は、地上側の物品搬送箇所と運搬車両における荷台の存在予定箇所との間に昇降自在に配置されて物品の中継搬送を行う中継搬送装置と、その中継搬送装置を昇降駆動する昇降駆動手段とが設けられた荷役作業用の搬送装置に関する。
【背景技術】
【0002】
上記の荷役作業用の搬送装置は、例えば、工場や物流施設等の出荷口において、物品搬送箇所に次々に搬送されてくる出荷対象の物品を、運搬車両の荷台に順次積み込む作業を行う場合に、中継搬送装置を物品搬送箇所の高さに応じた昇降位置に位置させた状態で物品を中継搬送装置に載せ、中継搬送装置を運搬車両の荷台の高さに応じた昇降位置に位置させた状態で物品を運搬車両の荷台に卸すことができるように、物品搬送箇所の高さに応じた昇降位置と運搬車両の荷台の高さに応じた昇降位置とに亘って、中継搬送装置を繰返し往復昇降移動させて、地上側の物品搬送箇所と高さの異なる運搬車両における荷台との間で物品を中継搬送するために使用するものである。ちなみに、上記の荷役作業用の搬送装置は、入荷対象の物品を運搬車両の荷台から地上側の物品搬送箇所に積み卸す場合にも使用される。
【0003】
かかる荷役作業用の搬送装置として、運搬車両の荷台の後面に設けられた位置合わせ用の被検出部材を検出する光センサが、中継搬送装置と一体昇降するように設けられ、中継搬送装置を運搬車両の荷台の高さに応じた高さに上昇させることを指令する位置合わせボタンと、中継搬送装置を地上側の物品搬送箇所の高さに応じて定めた昇降位置に下降させることを指令する完了ボタンとを備えたコントローラが設けられて、完了ボタンの指令により、中継搬送装置を地上側の物品搬送箇所の高さに応じた高さに自動下降させるように昇降駆動手段としての油圧リフタを作動させ、位置合わせボタンの指令により、中継搬送装置を上昇させ且つ光センサが位置合わせ用の被検出部材を検出すると停止させるように油圧リフタを作動させるように構成されたものがある(例えば、特許文献1参照。)。
尚、この特許文献1には記載されていないが、地上側の物品搬送箇所の高さに応じて定めた昇降位置に中継搬送装置が位置することを検出する位置検出手段が装備されて、この位置検出手段の検出情報に基づいて、完了ボタンの指令により、中継搬送装置を地上側の物品搬送箇所の高さに応じた高さに自動下降させることになる。
つまり、この特許文献1に記載の荷役作業用の搬送装置は、完了ボタンや位置合わせボタンを押すだけで、中継搬送装置を地上側の物品搬送箇所の高さに応じた高さや運搬車両の荷台の高さに応じた高さに自動的に昇降させることができるものであるから、地上側の物品搬送箇所と運搬車両の荷台との間で物品を中継搬送するために、中継搬送装置を地上側の物品搬送箇所の高さに応じた高さや運搬車両の荷台の高さに応じた高さに繰り返し昇降させることを、簡単な操作で行えるものとなる。
【0004】
【特許文献1】特開2000−062963号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところが、上記特許文献1の荷役作業用の搬送装置では、中継搬送手段を運搬車両の荷台の高さに応じた高さに自動的に昇降させるためには、上述の通り位置合わせ用の被検出部材を運搬車両の荷台の後面に設ける必要があるので、被検出部材を設けていない運搬車両の荷台に対しては、中継搬送手段を運搬車両の荷台の高さに応じた高さに自動的に昇降させることができないという問題があった。
ちなみに、荷役作業用の搬送装置においては、一般に、手動操作式の上昇指令スイッチや手動操作式の下降指令スイッチが備えられ、昇降駆動手段の作動を制御する昇降制御手段が、上昇指令スイッチにて上昇が指令されている間だけ中継搬送装置を上昇させ、且つ、下降指令スイッチにて下降が指令されている間だけ中継搬送装置を下降させるように昇降駆動手段の作動を制御するように構成される等、中継搬送装置を任意に手動昇降操作できるように構成されるものであり、被検出部材が設けられていない運搬車に対しては、中継搬送装置を手動昇降操作しながら中継搬送を行わせることになるが、このような手動昇降操作は、中継搬送装置と運搬車の荷台との関係を目視にて確認しながら行う煩雑なものであり、このような煩雑な操作を繰り返し行うことは作業者に大きな負担をかけるものとなる。
本発明は、上記実状に鑑みて為されたものであって、その目的は、中継搬送を行う全ての運搬車両に対してその荷台の高さに応じた高さに中継搬送装置を自動的に昇降させることができる荷役作業用の搬送装置を提供する点にある。
【課題を解決するための手段】
【0006】
本発明の第1特徴は、地上側の物品搬送箇所と運搬車両における荷台の存在予定箇所との間に昇降自在に配置されて物品の中継搬送を行う中継搬送装置と、その中継搬送装置を昇降駆動する昇降駆動手段とが設けられた荷役作業用の搬送装置において、
前記中継搬送装置が前記物品搬送箇所の高さに応じて定めた第1昇降位置に位置することを検出する第1昇降位置検出手段と、
前記中継搬送装置が前記運搬車両の荷台の高さに応じて変更設定自在な第2昇降位置に位置することを検出する第2昇降位置検出手段と、
昇降指令手段にて前記第1昇降位置への昇降が指令されると
前記中継搬送手段を前記第1昇降位置に昇降させ、且つ、
前記昇降指令手段にて前記第2昇降位置への昇降が指令されると
前記中継搬送手段を前記第2昇降位置に昇降させるべく、
前記第1昇降位置検出手段の検出情報及び前記第2昇降位置検出手段の検出情報に基づいて前記昇降駆動手段を作動させる昇降制御手段が設けられている点にある。
【0007】
本発明の第1特徴によると、昇降指令手段にて前記第1昇降位置への昇降が指令されると、前記昇降制御手段が前記第1昇降位置検出手段の検出情報に基づいて前記昇降駆動手段を作動させて、前記中継搬送手段を物品搬送箇所の高さに応じて定めた前記第1昇降位置に昇降させるので、昇降指令手段にて第1昇降位置への昇降を指令することにより、中継搬送手段を物品搬送箇所に応じた高さに自動的に昇降させることができる。
【0008】
また、昇降指令手段にて前記第2昇降位置への昇降が指令されると、前記昇降制御手段が前記第2昇降位置検出手段の検出情報に基づいて前記昇降駆動手段を作動させて、前記中継搬送手段を前記第2昇降位置に昇降させる。
【0009】
第2昇降位置検出手段は、中継搬送装置が前記運搬車両の荷台の高さに応じた昇降位置である第2昇降位置に位置することを検出するものであって、運搬車両によって荷台の高さが異なっても、第2昇降位置を運搬車両の荷台の高さに応じた適切な高さに変更設定できるものであるから、中継搬送装置が、積み込みや積み卸しを行う作業対象の運搬車両の荷台の高さに応じた適切な高さに位置することを検出することができる。つまり、積み込みや積み卸しを行う運搬車両の荷台の高さが異なる場合でも、運搬車両の荷台の高さに応じて第2昇降位置を変更設定するだけで、昇降指令手段にて第2昇降位置への昇降を指令することにより、中継搬送手段を、運搬車両の荷台の高さに応じて設定した高さに自動的に昇降させることができるものであり、しかも、このように運搬車両の荷台の高さに応じた高さに中継搬送装置を自動的に昇降させることを運搬車両に特別な装備を設けることなく行えるものであるため、中継搬送を行うことになる全ての運搬車両に対して、その荷台の高さに応じた高さに中継搬送装置を自動的に昇降させることができるものとなる。
【0010】
したがって、本発明の第1特徴によると、中継搬送を行う全ての運搬車両に対してその荷台の高さに応じた高さに中継搬送装置を自動的に昇降させることができる荷役作業用の搬送装置を得るに至った。
【0011】
本発明の第2特徴は、本発明の第1特徴において、前記第2昇降位置検出手段が、前記中継搬送装置を検出する検出センサを、その設置高さに対応する高さに前記中継搬送装置が位置するときに前記中継搬送装置を検出する状態で且つ地上側に設置した支持体に対して上下方向での支持位置を変更調整自在に取り付ける状態で設けて構成されている点にある。
【0012】
本発明の第2特徴によると、本発明の第1特徴と同様の作用に加えて、以下のような作用を奏する。
検出センサは、その設置高さに対応する高さに中継搬送装置が位置するときに中継搬送装置を検出するものであるから、検出センサの支持体における上下方向での支持位置を運搬車両の荷台の高さに応じて変更調整することにより、中継搬送装置が運搬車両の荷台の高さに応じた高さに昇降したときに、検出センサが中継搬送装置を検出するようにすることができる。つまり、検出センサの支持体における上下方向での支持位置を変更調整することにより第2昇降位置を変更設定することができる。
【0013】
したがって、第2昇降位置を運搬車両の荷台の高さに応じた高さに変更設定する場合には、運搬車両の荷台の高さを見ながら地上側に設置した支持体における検出センサの上下方向での支持位置を変更する簡単な作業により、第2昇降位置を変更設定することができる。
【0014】
このように、本発明の第2特徴によると、第2昇降位置を運搬車両の荷台の高さに応じた高さに変更設定する場合に、変更設定作業を容易に行うことができる荷役作業用の搬送装置を得るに至った。
【0015】
本発明の第3特徴は、本発明の第1特徴において、前記第2昇降位置検出手段が、前記中継搬送装置に一体的に昇降するように設けた検出センサが検出作用する被検知体を、その設置高さに対応する高さに前記検出センサが位置するときに検出作用される状態で且つ地上側に設置した支持体に対して上下方向での支持位置を変更調整自在に取り付ける状態で設けて構成されている点にある。
【0016】
本発明の第3特徴によると、本発明の第1特徴と同様の作用に加えて、以下のような作用を奏する。
検出センサが検出作用する被検知体は、その設置高さに対応する高さに検出センサが位置するときに検出作用される状態で、地上側に設置した支持体に対して上下方向での支持位置を変更調整自在に取り付ける状態で設けられているので、被検出体の支持体における上下方向での支持位置を運搬車両の荷台の高さに応じて変更調整することにより、中継搬送装置が運搬車両の荷台の高さに応じた高さに昇降したときに、検出センサが被検出体を検出するようにすることができる。つまり、被検出体の支持体における上下方向での支持位置を変更調整することにより第2昇降位置を変更設定することができる。
【0017】
したがって、第2昇降位置を運搬車両の荷台の高さに応じた高さに変更設定する場合には、運搬車両の荷台の高さを見ながら地上側に設置した支持体における被検知体の上下方向での支持位置を変更する簡単な作業により、第2昇降位置を変更設定することができる。
【0018】
さらに、検出センサは、中継搬送装置に一体的に昇降するように設けられるので、地上側に設置された支持体や被検出体には制御信号用の配線等を設ける必要がないため、制御信号用の配線等の引き回しの可否に起因して荷役作業用の搬送装置の設置場所が制約されるおそれが少ないものとなる。
【0019】
このように、本発明の第3特徴によると、第2昇降位置を運搬車両の荷台の高さに応じた高さに変更設定する場合に、変更設定作業を容易に行うことができるものであり、しかも、第2昇降位置検出手段を設けるときの配線等の条件が有利な荷役作業用の搬送装置を得るに至った。
【0020】
本発明の第4特徴は、本発明の第1特徴において、前記第2昇降位置検出手段が、前記中継搬送装置の昇降方向での昇降位置を検出する昇降位置検出センサと、前記第2昇降位置に対応する目標昇降位置を変更設定する目標昇降位置設定手段と、前記昇降位置検出センサにて検出される昇降位置が前記目標昇降位置設定手段にて設定された目標昇降位置になったことを判別する判別手段とから構成されている点にある。
【0021】
本発明の第4特徴によると、本発明の第1特徴と同様の作用に加えて、以下のような作用を奏する。
昇降制御手段が、中継搬送装置の昇降方向での昇降位置が目標昇降位置設定手段にて設定された目標昇降位置になるように、昇降駆動手段を作動させて中継搬送手段を昇降させるので、目標昇降位置設定手段による目標昇降位置を変更設定することにより、第2昇降位置を変更することができる。
【0022】
したがって、例えば、目標昇降位置設定手段をボリューム式のツマミで構成するなどして、第2昇降位置の変更設定操作の操作性を良くすることが可能となり、第2昇降位置の変更設定作業の作業性を向上させることができる荷役作業用の搬送装置を得るに至った。
【0023】
本発明の第5特徴は、本発明の第4特徴において、前記昇降指令手段が上昇指令及び下降指令を指令するように構成され、前記昇降制御手段が、前記昇降指令手段による上昇指令及び下降指令により前記中継搬送手段を上昇及び下降させるべく、前記昇降駆動手段を作動させるように構成され、前記目標昇降位置設定手段が、設定指令が指令されたときに前記昇降位置検出手段にて検出される昇降位置を目標昇降位置として記憶するように構成されている点にある。
【0024】
本発明の第5特徴によると、本発明の第4特徴と同様の作用に加えて、以下のような作用を奏する。
中継搬送手段が運搬車両の荷台との間で物品を移載するのに適切な高さに位置している状態で設定指令が指令されると、昇降位置検出手段にて検出される昇降位置が、目標昇降位置として記憶される。したがって、一旦、昇降指令手段による上昇指令及び下降指令により中継搬送手段を上昇及び下降させて、中継搬送手段を運搬車両の荷台との間で物品を移載するのに適切な高さに位置させた後は、目標昇降位置設定手段にて設定指令を指令して目標昇降位置を記憶しておくことで、昇降指令手段にて第2昇降位置への昇降を指令するだけで、中継搬送手段を運搬車両の荷台との間で物品を移載するのに適切な高さに位置させることができる。
【0025】
このように、本発明の第5特徴によると、中継搬送手段と運搬車両の荷台との間で物品を反復継続して移載する場合に、目標昇降位置設定手段にて設定指令を指令した後に行われる移載作業では、作業者は、簡単な操作により、運搬車両の荷台に物品を移載するのに適切な高さに中継搬送手段を昇降させることができるので、中継搬送手段と運搬車両の荷台との間で物品を反復継続して移載する場合の作業効率を向上させることができる荷役作業用の搬送装置を得るに至った。
【0026】
本発明の第6特徴は、本発明の第5特徴において、昇降制御手段が、昇降指令手段にて第2昇降位置への昇降が指令されて中継搬送手段を第2昇降位置に昇降させた状態において、昇降指令手段による上昇指令及び下降指令により中継搬送手段が昇降されたときには、その昇降手段による上昇指令及び下降指令に基づいて設定指令を目標昇降位置設定手段に指令するように構成されている点にある。
【0027】
本発明の第6特徴によると、本発明の第5特徴と同様の作用に加えて、以下のような作用を奏する。
昇降指令手段にて第2昇降位置への昇降が指令されて中継搬送手段が現在の設定による第2昇降位置に昇降したときに、運搬車両の荷台の高さに応じた適正な高さでない場合には、第2昇降位置を変更設定する必要があるが、この状態で、昇降指令手段による上昇指令及び下降指令により中継搬送手段を上昇及び下降させて、中継搬送手段の位置を変更して、荷台の高さに応じた適正な高さに位置させると、その昇降手段による上昇指令及び下降指令に基づいて設定指令が目標昇降位置設定手段に指令されるので、変更後の中継搬送手段の位置を新たな目標昇降位置として記憶させることができる。
【0028】
したがって、第2昇降位置を変更設定する場合に、昇降指令手段による上昇指令及び下降指令により、中継搬送手段を上昇及び下降させると同時に、変更した後の中継搬送手段の昇降位置を目標昇降位置として記憶させることができる。
【0029】
このように、本発明の第6特徴によると、第2昇降位置を変更設定する場合に、変更された後の中継搬送手段の昇降位置を目標昇降位置として記憶させる操作を省略することができ、第2昇降位置を迅速に変更設定することができる荷役作業用の搬送装置を得るに至った。
【0030】
本発明の第7特徴は、本発明の第4特徴において、目標昇降位置設定手段が、昇降指令手段にて第2昇降位置への昇降が指令されて中継搬送手段が第2昇降位置に昇降される回数に応じて、目標昇降位置を漸次上昇側又は下降側に自動的に修正するように構成されている点にある。
【0031】
本発明の第7特徴によると、本発明の第4特徴と同様の作用に加えて、以下のような作用を奏する。
昇降制御手段は、中継搬送手段が第2昇降位置に昇降される回数に応じて、目標昇降位置を漸次上昇側又は下降側に自動的に修正するので、中継搬送手段が第2昇降位置に昇降される回数が増えるに伴って、第2昇降位置への昇降が指令されたときに中継搬送手段が昇降する位置が、上昇側又は下降側に自動的に変化する。
【0032】
したがって、例えば、運搬車両へ物品をパレット単位で積み込む移載作業を行う場合や運搬車両からパレット単位で物品を卸す移載作業を行う場合のように移載作業回数に応じて積荷の荷重が増加又は減少して、運搬車両の荷台の高さが徐々に低下又は上昇することにより、第2昇降位置と運搬車両の荷台の高さとの間に許容範囲以上の高さの差が発生しうる場合等、中継搬送装置が第2昇降位置に昇降される回数が増えるに伴って運搬車両の荷台との間で物品を移載するのに適切な昇降位置が変化する場合に、わざわざ第2昇降位置の変更設定作業をしなくても、運搬車両の荷台の高さの変化に追従するように第2昇降位置が自動的に変更設定されるので、中継搬送装置が第2昇降位置に昇降したときに中継搬送装置が運搬車両の荷台との間で物品を移載するのに適切な昇降位置となる状態をできる限り多くの移載作業が行われる期間に亘って維持することができる。
【0033】
このように、本発明の第7特徴によると、複数回に亘って物品を運搬車両の荷台との間で移載することにより運搬車両の荷台の高さが次第に変化する場合に、第2昇降位置を変更設定する機会を減らして、より多くの回数に亘って中断することなく移載作業を繰返し行うことができ、もって、物品搬送箇所と運搬車両の荷台との間で物品を移載する場合の作業効率を向上させることができる荷役作業用の搬送装置を得るに至った。
【発明を実施するための最良の形態】
【0034】
〔第1実施形態〕
以下、本発明の荷役作業用の搬送装置の実施形態を図面に基づいて説明する。
図1〜図3に示すように、製品Wとこれを積載するパレットPからなる物品Aを搬送する地上側ローラコンベヤ1が設けられた入出荷口に、本発明が適用された荷役作業用の搬送装置3が設けられている。
【0035】
搬送装置3は、地上側ローラコンベヤ1で物品Aが搬送されてくる物品搬送箇所として搬送箇所Z1と、物品Aを運搬する運搬車両としてのトラックTが停車位置PKに停車した状態における荷台2が位置する存在予定箇所としての移載対象箇所Z2との間に設けられている。
【0036】
搬送装置3は、中間搬送装置としてのローラコンベヤTRと、上下方向に伸縮自在なXリンク機構4を昇降用モータMの回転駆動により伸縮作動させてローラコンベヤTRを昇降駆動する昇降駆動手段としての昇降リンク装置ELとを備えている。
【0037】
図1及び図2に示すように、Xリンク機構4の上方側の端部のうち固定されていない端部4eが連結された連結部材には、端部4eに備えられた係合軸5が昇降リンク装置ELによるローラコンベヤTRの昇降に伴って摺動する摺動案内用の長穴6が設けられている。係合軸5の摺動方向における長穴6の長さにより昇降リンク装置ELの機械的な作動可能範囲が規制され、ローラコンベヤTRは、機械下限位置Hb(図1において実線で示された位置)から機械上限位置Ht(図1において仮想線で示された位置)まで昇降可能となっている。
【0038】
ローラコンベヤTRには、係合軸5が当接することによりオン作動する第1リミットスイッチSW1が設けられている。ローラコンベヤTRが下降するに伴って第1リミットスイッチSW1がオンすることにより、制御ボックスCBに内装された後述する昇降制御装置HCが、昇降用モータMの回転駆動を停止させ、ローラコンベヤTRが機械下限位置Hbに達する前にローラコンベヤTRの昇降を停止させる。
【0039】
図1に示すように、第1リミットスイッチSW1は、ローラコンベヤTRの搬送面が地上側ローラコンベヤ1の搬送面と略一致する第1昇降位置としての搬送箇所用位置H1(図1において実線で示すローラコンベヤTRの位置)にローラコンベヤTRが昇降したときに、第1リミットスイッチSW1の当接部が係合軸5と当接してオンするように、長穴6の長手方向の適切な位置において長穴6の近傍に取り付けられている。なお、第1リミットスイッチSW1の取り付け位置は地上側ローラコンベヤ1の搬送面の高さに応じて決定される。
【0040】
本実施形態では、搬送装置3が、機械下限位置Hbと搬送箇所用位置H1と一致する状態で設置されているため、第1リミットスイッチSW1の長穴6に対する取り付け位置は、ローラコンベヤTRの機械下限位置Hbを規制する長穴6の端部に対応した位置となっている。つまり、ローラコンベヤTRが機械下限位置Hbに達すると、第1リミットスイッチSW1がオンとなり、昇降用モータMの回転駆動が停止されてローラコンベヤTRの昇降が停止される。
【0041】
このように、第1リミットスイッチSW1は、ローラコンベヤTRが、搬送箇所用位置H1に位置することを検出する第1昇降位置検出手段DET1として機能する。
【0042】
図1〜図3に示すように、搬送装置3が設置される床面における搬送装置3の側方箇所に、支持体としてのリミッタ取付棒7が、その長手方向を搬送装置3の昇降方向に沿わせた状態で立設されている。図3に示すように、リミッタ取付棒7には、リミッタ取付棒7に対して上下方向でスライド自在に取り付けられ、締め付けボルトの締め付けにより、リミッタ取付棒7における長手方向の任意の位置で位置保持可能に構成されたアタッチメント8が設けられ、このアタッチメント8に第2リミットスイッチSW2を固定させた状態で取り付けられている。
【0043】
そして、第2リミットスイッチSW2には、検出部分9が設けられており、ローラコンベヤTRが第2リミットスイッチSW2の取り付け高さに対応する高さまで昇降したときに、検出部分9がローラコンベヤTRに当接して、ローラコンベヤTRを検出できるようになっている。
【0044】
本実施形態では、リミッタ取付棒7を角棒で構成し、アタッチメント8にリミッタ取付棒7の水平断面形状に対応した形状の取付係合部を形成してあるので、リミッタ取付棒7を回転中心としたアタッチメント8の平面視における姿勢変化が規制され、これにより、第2リミットスイッチSW2の取り付け高さを変更設定する場合に、平面視におけるローラコンベヤTRと第2リミットスイッチSW2との相対位置関係が図3に示す状態に維持されるようになっている。
【0045】
つまり、第2リミットスイッチSW2は、その設置高さに対応する高さにローラコンベヤTRが位置するときにローラコンベヤTRを検出する状態で且つ地上側に設置したリミッタ取付棒7に対して上下方向での支持位置を変更調整自在に取り付けられている。
【0046】
したがって、ローラコンベヤTRが、トラックTの荷台2との間で物品Aを移載するのに適切な昇降高さである荷台用位置H2(図2に示された位置)に位置するときに、第2リミットスイッチSW2がオンするような高さに第2リミットスイッチSW2の上下取り付け高さを変更設定することにより、第2リミットスイッチSW2により荷台用位置H2を検出することができる。
【0047】
このように、第2リミットスイッチSW2は、トラックTの荷台2の高さに応じて変更設定自在な第2昇降位置としての荷台用位置H2にローラコンベヤTRが位置することを検出する第2昇降位置検出手段DET2として機能する。
【0048】
搬送装置3は、前述の昇降制御装置HCを昇降リンク装置ELの作動を制御する昇降制御手段として備えており、昇降制御装置HCを内装する制御ボックスCBには、接続端子を介して配線ケーブルにより、第1及び第2リミットスイッチSW1,SW2や、昇降用モータMや、後述する昇降指令手段としての操作リモコンRMが備える各指令用スイッチ等の入出力機器が接続されている。
【0049】
昇降制御装置HCは、マイコン等で構成され、マイコンが実行するプログラムにより昇降用モータMに対する出力が制御される。昇降制御装置HCに接続される入出力機器を制御ブロック図で示すと図4のようになる。図4に示すように、昇降制御装置HCには、上述の第1リミットスイッチSW1及び第2リミットスイッチSW2、操作リモコンRMに設けられた自動上昇スイッチ10、停止スイッチ11、及び、自動下降スイッチ12、並びに、昇降用モータMが接続されている。
【0050】
これにより、第1リミットスイッチSW1及び第2リミットスイッチSW2が出力する検出情報及び、操作リモコンRMに設けられた各指令用スイッチ10〜12を操作することによりにより出力される各種の指令情報が、昇降制御装置HCに入力され、また、昇降制御装置HCによる制御情報が昇降用モータMに対して出力される。
【0051】
自動上昇スイッチ10、停止スイッチ11、及び、自動下降スイッチ12は、非操作状態に復帰付勢された押ボタンスイッチにて構成されている。自動上昇スイッチ10が押し操作されると、ローラコンベヤTRを荷台用位置H2まで自動的に昇降させる自動上昇指令が指令され、自動下降スイッチ12が押し操作されると、ローラコンベヤTRを搬送箇所用位置H1まで自動的に昇降させる自動下降指令が指令され、停止スイッチ12が押し操作されると、昇降しているローラコンベヤTRを停止させる停止指令が指令される。
【0052】
以下、マイコンが実行する自動位置合わせ制御プログラムによる昇降制御装置HCの制御動作について図5のフローチャートに基づいて説明する。
【0053】
図5に示すように、制御装置HCは、ステップ#1で自動上昇指令であるか自動下降指令であるかを判別し、自動下降指令であれば、ステップ#2で昇降用モータMの回転駆動を下降方向で開始させ、ステップ#3で、第1リミットスイッチSW1がオンとなって、ローラコンベヤTRが搬送箇所用位置H1まで昇降したことが検出されると、ステップ#6で昇降用モータMの駆動が停止される。ステップ#1で自動上昇指令であると判別されると、ステップ#4で昇降用モータMの回転駆動を上昇方向で開始させ、ステップ#5で、第2リミットスイッチSW2がオンとなって、ローラコンベヤTRが荷台用位置H2まで昇降したことが検出されると、ステップ#6で昇降用モータMの駆動が停止される。
【0054】
つまり、昇降制御装置HCは、操作リモコンRMにて搬送箇所用位置H1への自動下降指令が指令されると、ローラコンベヤTRを搬送箇所用位置H1に昇降させ、且つ、操作リモコンRMにて荷台用位置H2への自動上昇指令が指令されると、ローラコンベヤTRを荷台用位置H2に昇降させるべく、第1リミットスイッチSW1及び第2リミットスイッチSW2の検出情報に基づいて昇降リンク装置ELを作動させるように構成されている。
【0055】
なお、図5のフローチャートに示す処理は、自動上昇スイッチ10又は自動下降スイッチ12の押し操作により指令される自動上昇指令や自動下降指令により実行が開始されるものであり、この処理の実行中に、つまり、ローラコンベヤTRが搬送箇所用位置H1又は荷台用位置H2に向って自動昇降している最中に、停止スイッチ11が押し操作されて停止指令が指令されると、割込み処理により昇降用モータの駆動が停止される。
【0056】
以上に説明した本実施形態の構成によると、作業者は、第2リミットスイッチSW2が取り付けられたアタッチメント8のリミッタ取付棒7における取り付け位置をトラックTの荷台2の高さに応じて変更設定することで、複数の物品Aについて積み込み又は積み卸し作業を繰り返し行う場合に、自動上昇スイッチ10及び自動下降スイッチ11をいわゆるワンショット操作するだけで、簡単に、ローラコンベヤTRを、搬送箇所用位置H1と荷台用位置H2との間で往復昇降させることができ、物品Aの積み込み又は積み卸し作業を良好に行うことができる。
【0057】
〔第2実施形態〕
本実施形態は、上述した第1実施形態と、第2昇降位置検出手段DET2の構成及び昇降制御手段の構成(具体的には、昇降制御手段としての昇降制御装置HCが実行する自動昇降位置合わせ制御処理の実行内容)が異なるほかは、同等の構成であるので、これらについて以下に説明する。
【0058】
本実施形態では、図6に示すように、第2リミットスイッチSW2を設けずに、昇降用モータMの回転駆動量を検出して、昇降用モータMの回転駆動量に比例した数のパルス信号を出力するするロータリエンコーダREを昇降制御装置HCに接続して設けてある。昇降制御装置HCは、変数として設けられた記憶部に格納された昇降カウントCの値をロータリエンコーダREが出力するパルス数だけ加算及び減算するので、昇降カウントCの値は、ローラコンベヤTRの昇降位置を示す値となっている。つまり、ロータリエンコーダREは、昇降位置検出センサとして機能する。
【0059】
なお、昇降カウントCの値とローラコンベヤTRの昇降位置との関係は線形関係を為しており、その特性はロータリエンコーダREの分解能に基づいて決定することになるが、昇降カウントCの値は、搬送装置3の設置時において、ローラコンベヤTRが機械下限位置Hbに位置する状態でリセットされるため、ローラコンベヤTRが機械下限位置Hbに位置する状態では、昇降カウントCの値は「0」となる。
【0060】
図6に示すように、操作リモコンRMに、昇降制御装置HCに接続されたボリューム型設定器13が設けられている。ボリューム型設定器13は、下限操作位置Φbから上限操作位置Φtまでに亘る任意の操作位置において設定保持可能に設けられた左右回転操作自在のつまみ部13aと、このつまみ部13aの操作位置を検出するポテンショメータを備えて構成されている。つまみ部13aを下限操作位置Φbから上限操作位置Φtの間の何れかの操作位置に操作した状態で、自動上昇スイッチ10を押し操作すると、昇降制御装置HCが、上述のポテンショメータの検出情報に基づいて、自動位置合わせ制御における目標昇降位置に対応する昇降カウントCの値である目標カウント値Cmを、制御パラメータとして記憶部に記憶する。つまり、ボリューム型設定器13は、目標昇降位置設定手段として機能する。
【0061】
つまみ部13aの操作位置に基づいて記憶される目標カウント値Cmは、つまみ部13aの操作位置と線形関係を為してなり、つまみ部13aが下限操作位置Φbに設定操作された場合には、ローラコンベヤTRが機械下限位置Hbに位置するときの昇降カウントCの値(以下、下限昇降カウント値Cbという)が設定され、つまみ部13aが上限操作位置Φtに設定操作された場合には、ローラコンベヤTRが機械上限位置Htに位置するときの昇降カウントCの値(以下、上限昇降カウント値Ctという)が設定され、つまみ部13aが下限操作位置Φbと上限操作位置Φtとの間の操作位置に設定操作された場合は、つまみ部13aの操作位置に対応する値が下限昇降カウント値Cb〜上限昇降カウント値Ctの範囲内で設定される。
【0062】
昇降制御装置HCは、自動上昇スイッチ10又は自動下降スイッチ12が押し操作されると、以下に説明する自動位置合わせ制御処理用のプログラムを実行して、ロータリエンコーダREのカウント値Cがボリューム型設定器13の設定位置に基づいて記憶された目標昇降カウントCmと一致すること、つまり、ロータリエンコーダREにて検出されるローラコンベヤTRの昇降位置が目標昇降位置となったことを判別するようになっている。つまり、昇降制御装置HCが判別手段として機能する。
【0063】
このように、本実施形態では、ボリューム型設定器13の設定位置を、下限操作位置Φbから上限操作位置Φtまでの範囲において、機械下限位置Hbから機械上限位置Htの範囲における荷台用位置H2の位置に対応する位置に変更設定することにより、自動位置合わせ制御における目標昇降位置を変更することができ、昇降制御装置HCは、ロータリエンコーダREにて検出されるローラコンベヤTRの昇降位置が、ボリューム型設定器13の設定位置により設定される目標昇降位置に位置するかどうかを判別する。
【0064】
つまり、本実施形態では、第2昇降位置検出手段DET2が、ロータリエンコーダRE、ボリューム型設定器13、昇降制御装置HCにて構成されている。
【0065】
以下、昇降制御装置HCのマイコンが実行する自動位置合わせ制御処理用のプログラムによる昇降制御装置HCの制御動作について図7のフローチャートに基づいて説明する。
【0066】
図7に示すように、昇降制御装置HCは、ステップ#1で自動上昇指令であるか自動下降指令であるかを判別し、自動下降指令であれば、ステップ#2で昇降用モータMの回転駆動を下降方向で開始させ、ステップ#3で、第1リミットスイッチSW1がオンとなって、ローラコンベヤTRが搬送箇所用位置H1まで昇降したことが検出されると、ステップ#7で昇降用モータMの駆動が停止される。ステップ#1で自動上昇指令であると判別されると、ステップ#4でボリューム型設定器13の設定位置に基づいて目標昇降カウントCmが記憶設定される。ステップ#5で昇降用モータMの回転駆動を上昇方向で開始させ、ステップ#6で、昇降カウントCの値が目標カウント値Cmに達して、ローラコンベヤTRが荷台用位置H2まで昇降したと判別されると、ステップ#7で昇降用モータMの駆動が停止される。
【0067】
つまり、昇降制御装置HCは、操作リモコンRMにて搬送箇所用位置H1への自動下降指令が指令されると、ローラコンベヤTRを搬送箇所用位置H1に昇降させ、且つ、操作リモコンRMにて荷台用位置H2への自動上昇指令が指令されると、ローラコンベヤTRを荷台用位置H2に昇降させるべく、第1リミットスイッチSW1で構成された第1昇降位置検出手段DET1の検出情報、並びに、ロータリエンコーダRE、ボリューム型設定器13、昇降制御装置HCで構成された第2昇降位置検出手段DET2の検出情報に基づいて昇降リンク装置ELを作動させるように構成されている。
【0068】
なお、一旦、自動上昇スイッチ10が押し操作されて、ローラコンベヤTRがボリューム型設定器13により設定された荷台用位置H2に昇降した状態において、ローラコンベヤTRの高さが、物品Aを荷台2との間で移載するのに適した高さに不足する場合には、ボリューム型設定器13を上限操作位置Φt側に相当分回転操作させた上で、再度自動上昇スイッチ10を押し操作することにより、ローラコンベヤTRを荷台用位置H2として適切な高さに上昇させることができる。
【0069】
また、同様に、一旦、自動上昇スイッチ10が押し操作されて、ローラコンベヤTRがボリューム型設定器13により設定された荷台用位置H2に昇降した状態において、ローラコンベヤTRの高さが、物品Aを荷台2との間で移載するのに適した高さを越える場合には、ボリューム型設定器13を下限操作位置Φb側に相当分回転操作させた上で、再度、自動上昇スイッチ10を押し操作することにより、ローラコンベヤTRを荷台用位置H2として適切な高さに下降させることができる
【0070】
〔第3実施形態〕
本実施形態は、上述した第2実施形態と、昇降指令手段の構成、及び、第2昇降位置検出手段DET2を構成する目標昇降位置設定手段の構成、並びに、昇降制御手段の構成(具体的には、昇降制御手段としての昇降制御装置HCが実行する処理の内容)が異なるほかは、同等の構成であるので、これらについて以下に説明する。
【0071】
本実施形態では、図8に示すように、押し操作されてオン状態となっている間継続して上昇指令及び下降指令を指令する手動上昇スイッチ14及び手動下降スイッチ15、押し操作されてオン状態となると、ローラコンベヤTRが位置する昇降位置を、自動昇降位置合わせ制御における目標昇降位置として昇降制御装置HCの記憶部に記憶させる記憶指令を指令する記憶スイッチ16、自動昇降位置合わせ制御による昇降回数に応じた目標昇降位置の更新頻度を設定する更新頻度設定スイッチ17が操作リモコンRMに設けられ、制御ボックスCBに接続された配線ケーブルを介して昇降制御手段としての昇降制御装置HCに接続されている。なお、手動上昇スイッチ14、手動下降スイッチ15及び記憶スイッチ16は非操作位置に復帰付勢された押しボタンスイッチで構成されており、非操作位置ではオフ状態となっている。
【0072】
このように、昇降指令手段としての操作リモコンRMが上昇指令及び下降指令を指令するように構成されている。
【0073】
また、図1(本実施形態においては、リミッタ取付棒7、アタッチメント8、第2リミットセンサSW2は備えていない。)に示すローラコンベヤTRの長穴6の端部に、ローラコンベヤTRが機械上限位置Htに位置することを検出する第3リミットスイッチSW3が設けられ、制御ボックスCBに接続された配線ケーブルを介して昇降制御手段としての昇降制御装置HCに接続されている。
【0074】
本実施形態の搬送装置3を使用する場合の作業者の作業手順の概略を図9に示すフローチャートに基づいて説明する。まず、作業者は、ステップ#1の手動位置合わせ操作を行う。手動位置合わせ操作では、操作リモコンRMの手動上昇スイッチ14や手動下降スイッチ15をオン状態に維持して上昇指令や下降指令を継続して指令する。上昇指令や下降指令が指令されると、昇降制御装置HCは後述する図10のフローチャートに示す手動位置合わせ制御処理を実行し、手動上昇スイッチ14や手動下降スイッチ15による上昇指令や下降指令が指令されている間だけ昇降リンク装置ELを作動させローラコンベヤTRを上昇または下降させる。
【0075】
ステップ#2で、作業者は、停止した状態のローラコンベヤTRの昇降位置が、荷台用位置H2に適切に位置しているか確認し、修正が必要であれば再度、手動上昇スイッチ14や手動下降スイッチ15による手動位置合わせ操作を行う。このように、必要に応じていわゆるインチング操作による微調整を行ってローラコンベヤTRを荷台用位置H2に適切に位置させる。
【0076】
ステップ#3で作業者は、操作リモコンRMの更新頻度設定スイッチ17を0回〜3回のうちから所望の設定値に選択設定する。更新頻度設定スイッチ17は、詳しくは後述するが、ローラコンベヤTRが荷台用位置H2に昇降される回数に応じて、一旦記憶設定された目標昇降位置を漸次上昇又は下降させる態様で変化させる場合の頻度を設定するものである。例えば、更新頻度設定スイッチ17により更新頻度として「2回」が選択設定されると、ローラコンベヤTRが荷台用位置H2に2回昇降した時点で目標昇降位置がそれまでのものより低い高さを示すものに変更される。
【0077】
ステップ#1〜ステップ#3の操作が完了した状態で、作業者は、ステップ#4の記憶設定操作を行う。具体的には、操作リモコンRMに設けられた記憶スイッチ16を押し操作する。これにより、記憶スイッチSW5がオン状態になり、記憶指令が指令され、昇降制御装置HCが後述する図11のフローチャートに示す目標位置設定処理を実行する。
【0078】
その後、作業者は、ステップ#5の自動位置合わせ操作を繰り返し行って、複数の物品AについてトラックTの荷台2に対する移載作業を繰り返し行う。
【0079】
具体的には、例えば、移載作業として物品の積み込み作業を行う場合、作業者は、搬送箇所用位置H1に位置するローラコンベヤTR上に物品Aを載置し、自動上昇スイッチ10を押し操作する。これにより、自動上昇スイッチ10がオン状態となり、自動上昇指令が指令され、昇降制御装置HCが後述する図12のフローチャートに示す自動位置合わせ処理を実行し、搬送箇所用位置H1に位置するローラコンベヤTRを荷台用位置H2に上昇させる。この状態で、作業者は、物品AをトラックTの荷台2に積み込む。
【0080】
ローラコンベヤTRに物品Aが載置されない状態となったら、作業者は、自動下降スイッチ12を押し操作する。これにより、自動下降スイッチ12がオン状態となり、自動下降指令が指令され、昇降制御装置HCが図12の自動位置合わせ制御処理を実行し、荷台用位置H2に位置するローラコンベヤTRを搬送箇所用位置H1に下降させる。この状態で、作業者は、次の物品AをローラコンベヤTRに載置する。
【0081】
そして、全ての物品AをトラックTの荷台2に積み込むまで、自動上昇スイッチ10及び自動下降スイッチ12のいわゆるワンショット操作により、ローラコンベヤTRを搬送箇所用位置H1と荷台用位置H2との間で往復昇降させ、積み込み作業を繰り返し行う。
【0082】
この間、ステップ#6に示すように、作業者は、自動上昇スイッチ10により荷台用位置H2にローラコンベヤTRを自動的に上昇させたときに、自動上昇が完了したときのローラコンベヤTRの昇降位置が、荷台用位置H2に適切に位置しているかどうかを確認する。そして、荷台用位置H2に昇降したローラコンベヤTRが移載作業に適した位置として許容される範囲外に位置しているときには、再び、ステップ#1の手動位置合わせ操作を行って、ローラコンベヤTRを荷台用位置H2に適切に位置させ、改めてステップ#3の更新頻度設定スイッチ17の設定操作やステップ#4の記憶設定操作を行って、自動上昇スイッチ10によりローラコンベヤTRが荷台用位置H2に適切に自動的に昇降するようにする。
【0083】
作業者が操作リモコンRMを操作すると昇降制御装置HCが備えるマイコンにより実行される前述の各種処理(手動位置合わせ制御処理、目標位置設定処理、自動位置合わせ制御処理)について、図10〜図12に示されたフローチャートに基づいて以下に説明する。なお、昇降制御装置HCは、起動されると図13のフローチャートに示すメインループ処理を実行する。そして、メインループ処理のステップ#1において指令待機状態となっているときに、作業者により操作リモコンRMが操作されると、実行すべき処理を判別した上で該当する処理を実行する。
【0084】
図10のフローチャートに示すように、手動位置合わせ制御処理では、ステップ#1で手動上昇指令が指令されているか否かを判別し、指令されていればステップ#2で昇降用モータMを上昇方向で回転駆動させる。ステップ#3で第3リミットスイッチSW3がオンと判別されるまで、つまり、ローラコンベヤTRが機械上限位置Htに位置することが検出されるまで、ステップ#1及びステップ#2の処理が繰り返されて手動昇降指令に基づく昇降用モータMの駆動が継続される。
【0085】
ステップ#1で手動上昇指令が指令されていないと判別されると、ステップ#4で手動下降指令が指令されているか否かを判別し、指令されていればステップ#5で昇降用モータMを下降方向で回転駆動させる。ステップ#6で第1リミットスイッチSW3がオンと判別されるまで、つまり、ローラコンベヤTRが機械下限位置Hbに位置することが検出されるまで、ステップ#4及びステップ#5の処理が繰り返されて手動昇降指令に基づく昇降用モータMの駆動が継続される。
【0086】
このように、手動位置合わせ制御処理は、一旦発生した手動上昇指令又は手動下降指令により処理が開始され、これらの指令が途絶えるまで処理が継続し、ローラコンベヤTRの上昇又は下降が継続する。そして、これらの指令が途絶えるか、若しくは、ローラコンベヤTRが機械上限位置Ht又は機械下限位置Hbにまで達すると、昇降用モータMの駆動が停止され、ローラコンベヤTRの昇降が停止されて、手動位置合わせ制御処理は終了する。
【0087】
つまり、本実施形態においては、昇降制御装置HCは、操作リモコンRMによる上昇指令及び下降指令によりローラコンベヤTRを上昇及び下降させるべく、昇降リンク装置ELを作動させるように構成されている。
【0088】
図11のフローチャートに示すように、目標位置設定処理では、ステップ#1で、更新頻度設定スイッチ17の設定値情報が昇降制御装置HCに取り込まれ、更新頻度設定スイッチ17の設定値が更新カウンタCrnの初期値として設定される。つまり、ステップ#1の処理により更新カウンタCrnの値が初期設定される。
【0089】
なお、詳しくは後述するが、更新カウンタCrnは、図12の自動位置合わせ制御処理で荷台用位置H2への昇降が行われるとディクリメントされるダウンカウンタであり、図13のメインループのステップ#2でその値がゼロチェックされ、目標カウント値Cmの更新処理(図13のステップ#3)を実行するトリガとして使用される。
【0090】
図11の目標位置設定処理のステップ#2で、当該処理が実行されるときのロータリエンコーダREの昇降カウントCの値を取得し、ステップ#3でその値を目標カウントCの値mとして記憶部に記憶し、目標位置設定処理を終了する。
【0091】
このように、本実施形態においては、操作リモコンRMにより設定指令が指令されると、昇降制御装置HCが目標位置設定処理を実行して、ロータリエンコーダREにて検出されるローラコンベヤTRの昇降位置を示す昇降カウントCの値が、目標昇降位置を示す目標カウント値Cmとして記憶されるように構成されているので、昇降制御装置HCは目標昇降位置設定手段として機能する。
【0092】
図12のフローチャートに示すように、自動位置合わせ制御処理では、ステップ#1で、自動上昇指令か自動下降指令か判別され、自動下降指令であれば、ステップ#2で昇降用モータMの下降方向での回転駆動を開始させ、ステップ#3で第1リミットスイッチSW1がオンして、ローラコンベヤTRが搬送箇所用位置H1に昇降したことが検出されるまで、昇降用モータMの下降方向への回転駆動状態が維持された状態で、第1リミットスイッチSW1の検出情報が監視される。ステップ#3で第1リミットスイッチSW1がオンして、ローラコンベヤTRが搬送箇所用位置H1に昇降したことが検出されるとステップ#7で昇降用モータMの下降方向への回転駆動が停止され、ローラコンベヤTRの昇降が停止される。
【0093】
ステップ#1で自動上昇指令であると判別されれば、ステップ#4で昇降用モータMの上昇方向での回転駆動を開始させ、ステップ#5で昇降カウントCの値が目標カウント値Cmに達したか否か判別され、昇降カウントCの値が目標カウント値Cmに一致するまで、昇降用モータMの上昇方向への回転駆動が維持された状態で、昇降カウントCの値が監視される。
【0094】
つまり、昇降制御装置HCは、昇降位置検出センサとしてのロータリカウンタREにて検出されるローラコンベヤTRの昇降位置を示す昇降カウントCの値が、目標設定処理にて設定された目標昇降位置を示す目標カウント値Cmになったことを判別するので、昇降制御装置HCは判別手段として機能する。
【0095】
ステップ#5で、昇降カウントCの値が目標カウント値Cmに達したと判別されると、ステップ#6で更新カウンタCrnを「1」だけディクリメントした上で、ステップ#7で昇降用モータMの上昇方向への回転駆動が停止され、ローラコンベヤTRの昇降が停止される。
【0096】
このように、自動位置合わせ制御処理は、一旦発生した自動上昇指令又は自動下降指令により処理が開始され、荷台用位置H2又は搬送箇所用位置H1に昇降するまで処理が継続し、ローラコンベヤTRの上昇又は下降が継続する。そして、ローラコンベヤTRが荷台用位置H2又は搬送箇所用位置H1に達すると、昇降用モータMの駆動が停止され、ローラコンベヤTRが停止されて、自動位置合わせ制御処理は終了する。
【0097】
なお、ローラコンベヤTRが自動昇降している最中に操作リモコンRMの停止スイッチ11が押し操作されて停止指令が指令されると、割り込み処理が発生して、昇降用モータMの回転駆動が停止されるとともに、自動位置合わせ制御処理が強制終了する。
【0098】
図13のフローチャートに示すように、メインループのステップ#2で、上述の自動位置合わせ制御処理のステップ#6でディクリメントされた更新カウンタCrnの値が「0」であるか否かがチェックされ、自動位置合わせ制御によりローラコンベヤTRが荷台用位置H2へ設定された更新頻度回数だけ昇降した結果、更新カウンタCrnの値が「0」までディクリメントされた場合には、昇降制御装置HC内部で設定指令が発生してステップ#3の処理が実行され、目標カウント値Cmの値が規定値αだけ減少するように更新設定され、ステップ#4で更新カウンタCrnの値が更新頻度設定スイッチ17により設定された値に再び初期設定される。
【0099】
このように、目標位置設定処理が実行されて、目標カウント値Cmが初期設定されてから、更新頻度設定スイッチ17により設定された値が示す回数だけ、操作リモコンRMの自動上昇スイッチ10により自動位置合わせ制御処理が実行されてローラコンベヤTRが荷台用位置H2に昇降すると、昇降制御装置HC内部で設定指令が発生して、目標カウント値Cmが減少変化するように更新設定される。
【0100】
その後、さらに、更新頻度設定スイッチ17により設定された値が示す回数だけ、操作リモコンRMの自動上昇スイッチ10により自動位置合わせ制御処理が実行されてローラコンベヤTRが荷台用位置H2に昇降すると、昇降制御装置HC内部で設定指令が発生して、目標カウント値Cmがさらに減少変化するように再び更新設定される。
【0101】
つまり、本実施形態においては、昇降制御装置HCが、ローラコンベヤTRが荷台用位置H2に昇降される回数に応じて目標昇降位置を漸次下降させる態様で、設定指令を目標昇降位置設定手段に指令して目標昇降位置を変化させるように構成されている。
【0102】
なお、更新頻度設定スイッチ17により「0」が設定された場合は、図11の目標位置設定処理のステップ#1で更新カウンタCrnの初期値が「0」に設定されるので、自動位置合わせ制御処理のステップ#6では更新カウンタCrnが初期値「0」からディクリメントされる。このため、更新カウンタCrnは、自動上昇指令に基づく自動位置合わせ制御処理の実行回数に伴って負の値で減少変化するため、メインループのステップ#3の処理が実行されることはなく、目標カウント値Cmは最初に記憶スイッチ16を押し操作して記憶させた値が維持される。したがって、トラックTの荷台2から複数の物品Aを積み卸す移載作業などのように、自動位置合わせ操作を繰り返し行って複数の物品Aの移載を行うと荷台2の高さが上昇し荷台用位置H2が漸次上昇変化することが考えられる場合は、更新頻度設定スイッチ17を「0」に設定しておけばよい。
【0103】
〔別実施形態〕
以下、別実施形態を列記する。
【0104】
(1)上記各実施形態では、第1昇降位置検出手段DET1をリミットスイッチにて構成したものを例示したが、これに限らず、例えば、光センサやロータリエンコーダ等を用いて構成してもよく、第1昇降位置検出手段DET1の具体的構成は種々変更可能である。また、昇降駆動手段を昇降リンク装置ELにて構成されたものを例示したが、これに限らず、昇降駆動手段の具体的構成は種々変更可能である。
【0105】
(2)上記各実施形態では、中継搬送装置をローラコンベヤTRにより構成されたものを例示したが、これに限らず、例えば、搬送機能を備えずに物品を載置支持するだけの平滑な鉄板により構成してもよく、中継搬送装置の具体的構成は種々変更可能である。
【0106】
(3)上記各実施形態では、物品搬送箇所として、入出荷口に向って物品Aを搬送する地上側ローラコンベヤ1の入出荷口側端部1eが位置する箇所であるものを例示したが、これに限らず、ハンドリフトを用いて作業者が中継搬送装置の上方まで物品Aを搬送してその位置でハンドリフトを抜き取って物品Aを載置する場合には、物品搬送箇所としては、ハンドリフトが中継搬送装置の手前で地上側に位置する箇所に相当するものであり、また、物品Aがキャスター付きの収納容器であって作業者が中継搬送装置の上方まで物品Aを搬送して載置する場合には、物品搬送箇所としては、中継搬送装置の手前で地上側に位置する箇所に相当するものであるといったように、物品搬送箇所としては地上側に位置する箇所であって、荷役作業用の搬送装置の近傍であれば種々の定義が可能である。
【0107】
(4)上記各実施形態では、昇降指令手段が制御ボックスCBにケーブル接続された有線式の操作リモコンRMにて構成されたものを例示したが、これに限らず、無線式の操作リモコンにて構成する等、昇降指令手段の具体的構成は種々変更可能である。
【0108】
(5)上記各実施形態では、運搬車両をトラックTにて構成したものを例示したが、これに限らず、例えば、ハッチバック式の乗用車で構成する等、運搬車両の具体的構成は種々変更可能である。
【0109】
(6)上記各実施形態では、第1昇降位置としての搬送箇所用位置H1と第2昇降位置としての荷台用位置H2との上下方向の相対位置関係として、搬送箇所用位置H1が荷台用位置H2の上方に位置するようなものを例示したが、これとは逆に荷台用位置H2が搬送箇所用位置H1の上方に位置するようなものであってもよい。
【0110】
(7)上記第1実施形態及び第2実施形態において、昇降指令手段としての操作リモコンRMに、押し操作している間だけローラコンベヤTRを上昇させる上昇指令を指令する手動上昇指令ボタン、及び、押し操作している間だけローラコンベヤTRを下降させる下降指令を指令する手動下降指令ボタンを設け、昇降制御装置HCを、上昇指令又は下降指令が指令されると、上昇指令又は下降指令が指令されている間だけローラコンベヤTRを上昇又は下降させるべく昇降リンク装置ELを作動させる手動昇降制御処理を実行するように構成してもよい。
【0111】
(8)上記第2実施形態及び第3実施形態では、ローラコンベヤTRの昇降位置を検出する昇降位置検出センサを、ロータリエンコーダREにて構成したものを例示したが、搬送装置3が設置された地上側に設置され、ローラコンベヤTRの下面に設けられた反射板までの距離を測距する反射式のレーザ測距計により構成したもの等、昇降位置検出センサの具体構成は種々変更可能である。
【0112】
(9)上記第1実施形態では、第2昇降位置検出手段としての検出センサが、第2リミットスイッチSW2にて構成されたものを例示したが、これに限らず、光センサにて構成する等、検出センサの具体的構成は種々変更可能である。
【0113】
(10)上記第1実施形態では、第2昇降位置検出手段を、リミッタ支持棒7に検出センサとしての第2リミットスイッチSW2が、リミッタ支持棒7に対する支持位置を昇降自在に設けられたものにより構成されたものを例示したが、これに代えて、ローラコンベヤTRに一体的に昇降するように設けられた検出センサとしての第2リミットスイッチSW2と、リミッタ支持棒7に対する支持位置を変更調整自在に取り付けられ、第2リミットスイッチSW2が検出作用するリミッタ部材とで構成されたものでもよい。
【0114】
(11)上記第2実施形態では、目標昇降位置設定手段が、ボリューム型設定器13で構成されたものを例示したが、これに代えて、テンキーパットを備えた数値入力装置等で構成されたものでよい。
【0115】
(12)上記第3実施形態では、昇降制御装置HCが、ローラコンベヤTRが荷台用位置H2に昇降される回数に応じて目標昇降位置を漸次下降させる態様で、設定指令を目標昇降位置設定手段に指令して目標昇降位置を変化させるように構成されたものを例示したが、これに代えて、昇降制御装置HCが、ローラコンベヤTRが荷台用位置H2に昇降される回数に応じて目標昇降位置を漸次上昇させる態様で、設定指令を目標昇降位置設定手段に指令して目標昇降位置を変化させるように構成されたものでもよい。また、積み込み作業時と積み卸し作業時とで使い分けが可能なように、移載種別設定スイッチを設け、このスイッチの切換え操作により上記何れかの態様で目標昇降位置が変化するように選択可能に構成してもよい。
【0116】
(13)上記第3実施形態において目標カウント値Cmを更新設定する場合の規定値αは変更設定可能なものであってもよい。
【図面の簡単な説明】
【0117】
【図1】搬送装置のローラコンベヤが搬送箇所用位置に位置する状態を示す側面図
【図2】搬送装置のローラコンベヤが荷台用位置に位置する状態を示す側面図
【図3】搬送装置の設置位置を示す平面図
【図4】第1実施形態における制御構成のブロック図
【図5】第1実施形態における自動位置合わせ制御のフローチャート
【図6】第2実施形態における制御構成のブロック図
【図7】第2実施形態における自動位置合わせ制御のフローチャート
【図8】第3実施形態における制御構成のブロック図
【図9】第3実施形態における作業者の操作手順を示すフローチャート
【図10】第3実施形態における手動位置合わせ制御のフローチャート
【図11】第3実施形態における目標位置設定処理のフローチャート
【図12】第3実施形態における自動位置合わせ制御のフローチャート
【図13】第3実施形態におけるメインループのフローチャート
【符号の説明】
【0118】
A 物品
T 運搬車両
Z1 物品搬送箇所
Z2 存在予定箇所
TR 中継搬送装置
EL 昇降駆動手段
DET1 第1昇降位置検出手段
DET2 第2昇降位置検出手段
RE 昇降位置検出センサ
Cm 目標昇降位置
HC 昇降制御手段
RM 昇降指令手段
H1 第1昇降位置
H2 第2昇降位置
2 荷台
3 搬送装置
7 支持体
13 目標昇降位置設定手段
【特許請求の範囲】
【請求項1】
地上側の物品搬送箇所と運搬車両における荷台の存在予定箇所との間に昇降自在に配置されて物品の中継搬送を行う中継搬送装置と、
その中継搬送装置を昇降駆動する昇降駆動手段とが設けられた荷役作業用の搬送装置であって、
前記中継搬送装置が前記物品搬送箇所の高さに応じて定めた第1昇降位置に位置することを検出する第1昇降位置検出手段と、
前記中継搬送装置が前記運搬車両の荷台の高さに応じて変更設定自在な第2昇降位置に位置することを検出する第2昇降位置検出手段と、
昇降指令手段にて前記第1昇降位置への昇降が指令されると前記中継搬送手段を前記第1昇降位置に昇降させ、且つ、前記昇降指令手段にて前記第2昇降位置への昇降が指令されると前記中継搬送手段を前記第2昇降位置に昇降させるべく、前記第1昇降位置検出手段の検出情報及び前記第2昇降位置検出手段の検出情報に基づいて前記昇降駆動手段を作動させる昇降制御手段が設けられている荷役作業用の搬送装置。
【請求項2】
前記第2昇降位置検出手段が、前記中継搬送装置を検出する検出センサを、その設置高さに対応する高さに前記中継搬送装置が位置するときに前記中継搬送装置を検出する状態で且つ地上側に設置した支持体に対して上下方向での支持位置を変更調整自在に取り付ける状態で設けて構成されている請求項1記載の荷役作業用の搬送装置。
【請求項3】
前記第2昇降位置検出手段が、前記中継搬送装置に一体的に昇降するように設けた検出センサが検出作用する被検知体を、その設置高さに対応する高さに前記検出センサが位置するときに検出作用される状態で且つ地上側に設置した支持体に対して上下方向での支持位置を変更調整自在に取り付ける状態で設けて構成されている請求項1記載の荷役作業用の搬送装置。
【請求項4】
前記第2昇降位置検出手段が、
前記中継搬送装置の昇降方向での昇降位置を検出する昇降位置検出センサと、
前記第2昇降位置に対応する目標昇降位置を変更設定する目標昇降位置設定手段と、
前記昇降位置検出センサにて検出される昇降位置が前記目標昇降位置設定手段にて設定された目標昇降位置になったことを判別する判別手段とから構成されている請求項1記載の荷役作業用の搬送装置。
【請求項5】
前記昇降指令手段が上昇指令及び下降指令を指令するように構成され、
前記昇降制御手段が、前記昇降指令手段による上昇指令及び下降指令により前記中継搬送手段を上昇及び下降させるべく、前記昇降駆動手段を作動させるように構成され、
前記目標昇降位置設定手段が、設定指令が指令されたときに前記昇降位置検出手段にて検出される昇降位置を目標昇降位置として記憶するように構成されている請求項4記載の荷役作業用の搬送装置。
【請求項6】
前記昇降制御手段が、前記昇降指令手段にて前記第2昇降位置への昇降が指令されて前記中継搬送手段を前記第2昇降位置に昇降させた状態において、前記昇降指令手段による上昇指令及び下降指令により前記中継搬送手段が昇降されたときには、その前記昇降手段による上昇指令及び下降指令に基づいて前記設定指令を前記目標昇降位置設定手段に指令するように構成されている請求項5記載の荷役作業用の搬送装置。
【請求項7】
前記目標昇降位置設定手段が、前記昇降指令手段にて前記第2昇降位置への昇降が指令されて前記中継搬送手段が前記第2昇降位置に昇降される回数に応じて、前記目標昇降位置を漸次上昇側又は下降側に自動的に修正するように構成されている請求項4記載の荷役作業用の搬送装置。
【請求項1】
地上側の物品搬送箇所と運搬車両における荷台の存在予定箇所との間に昇降自在に配置されて物品の中継搬送を行う中継搬送装置と、
その中継搬送装置を昇降駆動する昇降駆動手段とが設けられた荷役作業用の搬送装置であって、
前記中継搬送装置が前記物品搬送箇所の高さに応じて定めた第1昇降位置に位置することを検出する第1昇降位置検出手段と、
前記中継搬送装置が前記運搬車両の荷台の高さに応じて変更設定自在な第2昇降位置に位置することを検出する第2昇降位置検出手段と、
昇降指令手段にて前記第1昇降位置への昇降が指令されると前記中継搬送手段を前記第1昇降位置に昇降させ、且つ、前記昇降指令手段にて前記第2昇降位置への昇降が指令されると前記中継搬送手段を前記第2昇降位置に昇降させるべく、前記第1昇降位置検出手段の検出情報及び前記第2昇降位置検出手段の検出情報に基づいて前記昇降駆動手段を作動させる昇降制御手段が設けられている荷役作業用の搬送装置。
【請求項2】
前記第2昇降位置検出手段が、前記中継搬送装置を検出する検出センサを、その設置高さに対応する高さに前記中継搬送装置が位置するときに前記中継搬送装置を検出する状態で且つ地上側に設置した支持体に対して上下方向での支持位置を変更調整自在に取り付ける状態で設けて構成されている請求項1記載の荷役作業用の搬送装置。
【請求項3】
前記第2昇降位置検出手段が、前記中継搬送装置に一体的に昇降するように設けた検出センサが検出作用する被検知体を、その設置高さに対応する高さに前記検出センサが位置するときに検出作用される状態で且つ地上側に設置した支持体に対して上下方向での支持位置を変更調整自在に取り付ける状態で設けて構成されている請求項1記載の荷役作業用の搬送装置。
【請求項4】
前記第2昇降位置検出手段が、
前記中継搬送装置の昇降方向での昇降位置を検出する昇降位置検出センサと、
前記第2昇降位置に対応する目標昇降位置を変更設定する目標昇降位置設定手段と、
前記昇降位置検出センサにて検出される昇降位置が前記目標昇降位置設定手段にて設定された目標昇降位置になったことを判別する判別手段とから構成されている請求項1記載の荷役作業用の搬送装置。
【請求項5】
前記昇降指令手段が上昇指令及び下降指令を指令するように構成され、
前記昇降制御手段が、前記昇降指令手段による上昇指令及び下降指令により前記中継搬送手段を上昇及び下降させるべく、前記昇降駆動手段を作動させるように構成され、
前記目標昇降位置設定手段が、設定指令が指令されたときに前記昇降位置検出手段にて検出される昇降位置を目標昇降位置として記憶するように構成されている請求項4記載の荷役作業用の搬送装置。
【請求項6】
前記昇降制御手段が、前記昇降指令手段にて前記第2昇降位置への昇降が指令されて前記中継搬送手段を前記第2昇降位置に昇降させた状態において、前記昇降指令手段による上昇指令及び下降指令により前記中継搬送手段が昇降されたときには、その前記昇降手段による上昇指令及び下降指令に基づいて前記設定指令を前記目標昇降位置設定手段に指令するように構成されている請求項5記載の荷役作業用の搬送装置。
【請求項7】
前記目標昇降位置設定手段が、前記昇降指令手段にて前記第2昇降位置への昇降が指令されて前記中継搬送手段が前記第2昇降位置に昇降される回数に応じて、前記目標昇降位置を漸次上昇側又は下降側に自動的に修正するように構成されている請求項4記載の荷役作業用の搬送装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2007−246195(P2007−246195A)
【公開日】平成19年9月27日(2007.9.27)
【国際特許分類】
【出願番号】特願2006−69344(P2006−69344)
【出願日】平成18年3月14日(2006.3.14)
【出願人】(000003643)株式会社ダイフク (1,209)
【Fターム(参考)】
【公開日】平成19年9月27日(2007.9.27)
【国際特許分類】
【出願日】平成18年3月14日(2006.3.14)
【出願人】(000003643)株式会社ダイフク (1,209)
【Fターム(参考)】
[ Back to top ]