
荷役物運搬機の吊り具
【課題】治具に荷役物を嵌入する時に、こじないでスムースに嵌入する吊り具を提供する事を目的としている。
【解決手段】支持体にシャフトとスライド駆動装置が固着され、シャフト先端に保持機構を有し、スライド駆動装置に押動部を有し、押動部はクランプ機構を有し、クランプ機構で荷役物をクランプし、押動部はシャフトに沿ってスライドして荷役物を押動し、シャフトに歪センサが配設され、歪センサでシャフトの撓み方向と撓み量を検出し、歪センサの信号を基に荷役物運搬機の昇降駆動装置の出力を補正してシャフトを任意の角度に保持する制御部を有し、荷役物を治具に嵌入させる。
【解決手段】支持体にシャフトとスライド駆動装置が固着され、シャフト先端に保持機構を有し、スライド駆動装置に押動部を有し、押動部はクランプ機構を有し、クランプ機構で荷役物をクランプし、押動部はシャフトに沿ってスライドして荷役物を押動し、シャフトに歪センサが配設され、歪センサでシャフトの撓み方向と撓み量を検出し、歪センサの信号を基に荷役物運搬機の昇降駆動装置の出力を補正してシャフトを任意の角度に保持する制御部を有し、荷役物を治具に嵌入させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、荷役物を保持して荷役物運搬機で移載し、治具に嵌入させる吊り具に関するものである。
【背景技術】
【0002】
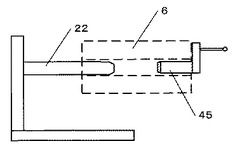
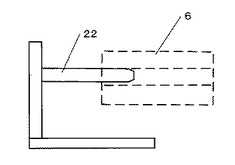
図2は、荷役物の斜視図であり、ロール状で中が中空となっている中空部9を有している。図14は、従来の吊り具45であり、図3の台10に置いてある荷役物6を保持するには、図14の吊り具45で移載していた。荷役物6の重量が重いほど吊り具45が撓み、図14の様に荷役物4の中空部9と治具22のクリアランスが小さい場合は、荷役物6を治具22に嵌入しにくいという不具合点があった。また、図15は、治具22と荷役物6であり、一旦、治具22の一部に嵌入にても、荷役物6を完全に嵌入させるためには人で押していた。しかし、重量が相当重い場合は、人でも荷役物6が動かず、荷役物6を治具22へ完全に嵌入させることはできなかった。
【0003】
また、反転機能付きの吊り具で、角度を可変させることは可能だが、ロールの中空部と治具の寸法の差が小さい場合は、微調整ができず、こじれた方向が作業者には判断できない為、治具と荷役物がこじてしまうという不具合があった。
【特許文献1】特開2007−245763号公報
【0004】
重量が重い荷役物を吊った状態で、吊り具の撓み量を少なくしようとすると、吊り具を頑丈に製作する必要があり、相当重く大きくなるという不具合点があった。特に、治具と中空部のクリアランスが少ないと、吊り具の撓み量を少なくする必要があった。
【発明の開示】
【発明が解決しようとする課題】
【0005】
解決しようとする問題点は、軽量な吊り具では治具に嵌入できない点である。
【課題を解決するための手段】
【0006】
本発明は、保持機構で治具と吊り具を吸着させ、歪センサの信号を基に、昇降駆動装置の出力を補正し、押動部をスライドさせ、人の力を使わず、荷役物を治具に押し込むことを最も主要な特徴とする。
【発明の効果】
【0007】
本発明の吊り具は、重量が重い荷役物で、治具と中空部のクリアランスが少ない場合でも、荷役物重量の一部を治具に載せた場合に、昇降駆動装置の出力を補正し、吊り具の撓み量を補正するので、吊り具を軽量に製作する事ができるという利点がある。
【発明を実施するための最良の形態】
【0008】
重量が重い荷役物で、治具と中空部のクリアランスが少ない場合でも、軽量の部品で、荷役物を人の力を使わず、荷役物を治具に押し込めることを実現した。
【実施例1】
【0009】
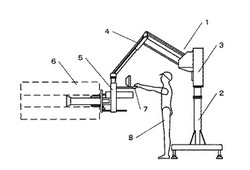
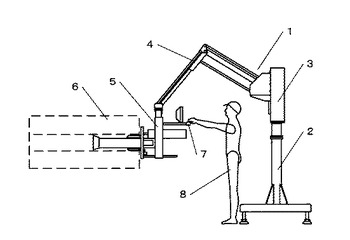
図1は、荷役物運搬機と吊り具と荷役物の総体図である。荷役物運搬機1は、ポール台座2に本体部3が取り付けられ、本体部3にはアーム4が係合されている。本体部3の内部にアーム4を昇降させる昇降駆動装置(図示せず)を備えている。アーム4の先端には、吊り具5が取り付けられ、吊り具5は荷役物6を持ち上げている。荷役物6は断面図となっている。吊り具5の操作部7を作業者8が把持して、荷役物6を三次元に移載できる。
【0010】
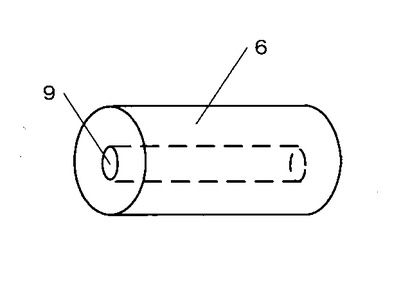
図2は、荷役物の斜視図である。荷役物6はロール状であり、中空部9を備えており、中空部9に吊り具や治具を嵌入できる。
【0011】
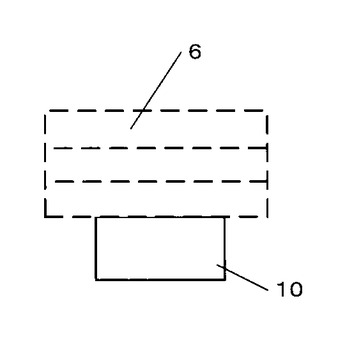
図3は、台の上の荷役物と台の図である。台10の上に荷役物6が置いてある。荷役物6は断面図となっている。
【0012】
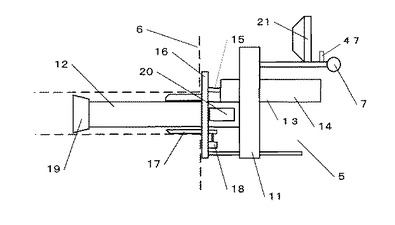
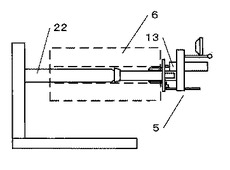
図4は、吊り具と荷役物の図である。吊り具5は、支持体11にシャフト12とスライド駆動装置13と操作部7が固着されている。スライド駆動装置13は、シリンダ14とロッド15と押動部16を有している。スライド駆動装置13は、ロッド15の位置を検出する位置センサ(図示せず)を備えている。後述する制御のフロー図でのロッド15の原点は、図4の状態である。
押動部16は、クランプ機構17を有している。クランプ機構17は、シリンダ18を有しており荷役物6をクランプしている。シャフト12の先端に保持機構19を有している。押動部16はシャフト12に沿ってスライドして荷役物6を押動する。シャフト12に歪センサ20が配設され、歪センサ20でシャフト12の撓み方向と撓み量を検出する。操作部7には、モニター21が配設されている。モニター21付近に、撓み方向表示機47が配設されている。撓み方向表示機47は、歪センサ20の任意の基準値に対して撓み方向を表示する。荷役物6は、一部の断面時であり、点線で示している。
【0013】
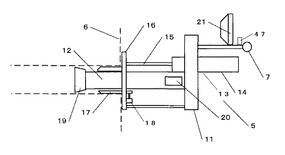
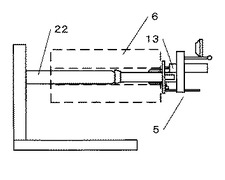
図5は、吊り具と荷役物の図である。符号は、図4と同様である。図4の状態から、スライド駆動装置13で荷役物6を押動した状態である。押動部16はシャフト12に沿ってスライドしている。
【0014】
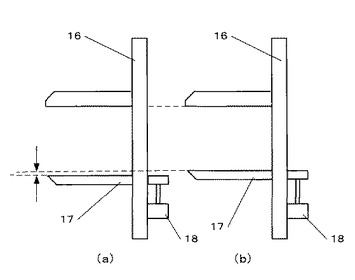
図6は、クランプ機構の図である。クランプ機構17は、シリンダ18を有しており、図6(a)が荷役物6の中空部9をクランプした状態で、図6(b)が荷役物6の中空部9をアンクランプした状態である。
【0015】
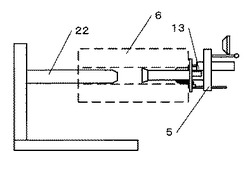
図7は、吊り具と荷役物と治具の図である。荷役物6は断面図となっている。荷役物6に吊り具5が嵌入されている。荷役物6に治具22の一部が嵌入されている。
【0016】
図8は、吊り具と荷役物と治具の図である。荷役物6は断面図となっている。荷役物6に吊り具5が嵌入されている。荷役物6に治具22の一部が嵌入されている。
【0017】
図9は、吊り具と荷役物と治具の図である。荷役物6は断面図となっている。荷役物6に吊り具5が嵌入されている。スライド駆動装置13で荷役物6を押動した状態で、荷役物6に治具22が嵌入されている。
【0018】
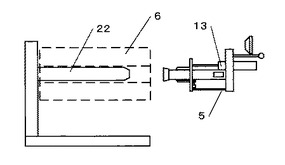
図10は、吊り具と荷役物と治具の図である。荷役物は断面図となっている。荷役物6に治具22が嵌入されている。荷役物6から吊り具5が抜かれている。
【0019】
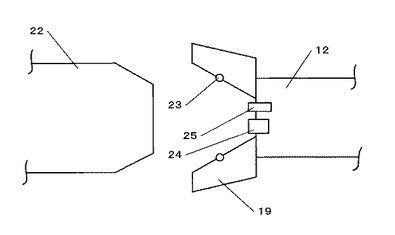
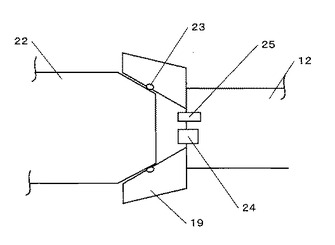
図11は、保持機構と治具の先端の断面図である。シャフト12の先端の保持機構19と治具22の先端である。保持機構19には、パッキン23と、エアを負圧して吸着できる吸着装置24と、カメラ25を配設している。カメラ25で撮影した画像をモニター21に映し出し、位置合わせの作業がしやすいようにしている。
【0020】
図12は、保持機構と治具の先端の断面図である。符号は、図11と同様である。治具22の先端に保持機構19のパッキン23が触れている状態である。吸着装置24で、負圧にすることにより、治具22と保持機構19が、密着して固着される。
【0021】
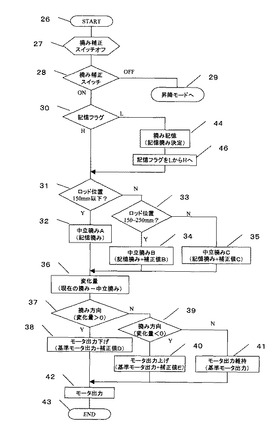
図13は、制御のフロー図である。昇降駆動装置に制御部を有している。START26から始まり、撓み補正スイッチオフ27で撓み補正スイッチがオフになっているか確認を行う。撓み補正スイッチ28でスイッチが、オンかオフかの確認を行う。撓み補正スイッチ28がオフの場合は、歪センサの信号が無関係な昇降モードへ29で荷役物運搬機1が昇降する。撓み補正スイッチ28がオンの場合は、記憶フラグ30へ移行する。記憶フラグ30で、荷役物6を吊った状態の歪センサ20の撓み量の信号を記憶していたらロッド位置31へ、歪センサ20の撓み量の信号を記憶していなかったら撓み記憶44へ移行する。撓み記憶44で、記憶撓みを決定し、記憶フラグをLからHへ46で記憶フラグ30をLからHに切替わる。記憶フラグ30がHとなり、ロッド位置31へ移行する。
【0022】
ロッド位置31では、ロッド15の原点からの移動量を判断する。ロッド15の原点からの移動量は、押動部16のスライド量と同じである。150mm未満の場合は中立撓みA32に移行する。ロッド15の移動量が150mm以上の場合は、更に、ロッド位置33に移行する。ロッド15の位置が、150mm以上250mm未満の場合は、中立撓みB34に移行する。中立撓みB34では、記憶撓みに補正量Bが加算され、中立撓みBとなる。ロッド15の位置が、250mm以上の場合は、中立撓みC35に移行する。中立撓みC35では、記憶撓みに補正量Cが加算され、中立撓みCとなる。中立撓みA32又は中立撓みB34又は中立撓みC35は、変化量36に移行する。
【0023】
変化量36では、現在の撓みから中立撓みA又は中立撓みB又は中立撓みCが引かれる。変化量36から撓み方向37へ移行される。
【0024】
撓み方向37では、変化量がゼロより大きいなら、中立撓みA又は中立撓みB又は中立撓みCより上に撓んでいると判断し、モータ出力下げ38へ移行する。モータ出力下げ38では、基準モータ出力に補正値Dを加算する。補正値Dは、負の数値である。撓み方向37では、変化量がゼロ以下なら、撓み方向39へ移行する。撓み方向で39は、変化量がゼロより小さいなら、中立撓みA又は中立撓みB又は中立撓みCより下に撓んでいると判断し、モータ出力上げ40へ移行する。モータ出力の上げ40では、基準モータ出力に補正値Eを加算する。撓み方向39では、変化量がゼロなら、中立撓みA又は中立撓みB又は中立撓みCは撓んでいないと判断し、モータ出力維持41へ移行する。モータ出力下げ38とモータ出力上げ40とモータ出力維持41の夫々は、モータ出力42に移行される。モータ出力42では、昇降駆動装置のモータの出力を指示する。モータ出力42は、END43へ移行する。このSTART26からEND43の一連の演算は、8/1000秒間隔で演算を繰り返し、作業の間連続して制御される。
【0025】
図を用いて作用の説明する。図3の様に、台10に荷役物6が置いてある。撓みスイッチオフにしてある状態で、荷役物6の中空部9に吊り具5を嵌入させ、クランプ機構17で荷役物6をクランプして、図1の状態する。荷役物6の重みで、空荷の状態よりシャフト12が図に向かって左側に撓む。次に、操作部7の撓みスイッチ(図示せず)をオンにすると、撓みスイッチ28が記憶フラグ30に移行される。記憶フラグ30には、歪センサ20の信号が記憶されていないので、撓み記憶44に移行される。ここで、基準となる歪センサ20の撓みの記憶を行う。歪センサ20の撓み量の数値が、記憶フラグ30に記憶される。次に、図7の状態になるように、治具22の位置をカメラ25で映し、その映像をモニター21で確認して荷役物運搬機1を操作して治具22に荷役物6の中空部9を嵌入させる。図1や図7の状態では、ロッド15が伸長していないので、ロッド位置31は150mm未満であり、中立撓みA32に移行される。図7の状態で、治具22に中空部9が触れてこじれると、シャフト12が上又は下に撓み、基準の記憶撓みに変化が起こる。変化量36では、現在の撓みから中立撓みを引く。現在の撓みから中立撓みを引いて、ゼロより大きいならモータ出力下げ38に移行して、基準のモータ出力に補正値Dを足し、モータ出力を下げる信号を出す。変化量36が、ゼロより大きい場合は、吊り具5が治具22より上の位置の状態でこじている。よって、モータ出力下げ38からモータ出力42に移行して、昇降駆動装置のモータの出力を下げる事により、治具22と吊り具5の位置が適正となる。また、吊り具5が下がり過ぎて、吊り具5が治具22より下の位置の状態でこじたら、変化量はゼロ未満となり、撓み方向39からモータ出力上げ40に移行して、基準のモータ出力に補正値Eを加算し、モータの出力を上げる信号を出す。変化量が、ゼロより小さい場合は、吊り具5が治具22より下の位置の状態でこじている。よって、モータ出力上げ40からモータ出力42に移行して、モータの出力を上げる事により、治具22と吊り具5の位置が適正となる。また、変化量がゼロの場合は、治具22と吊り具5の位置が適正であり、モータ出力42に移行して、基準のモータ出力を維持する信号を出す。8/1000秒に1度の割合で瞬時に演算しているので、上にこじても補正し、下にこじても補正するので、スムースに中空部9が治具22に嵌入できる。撓み方向表示機47では、上にこじているか、下にこじているか、こじていないかが表示により作業者8が分かる。
【0026】
次に、更に図8の状態まで荷役物6を嵌入させる。保持機構19の吸着装置24で、治具22の先端を吸着させる。次にスライド駆動装置13の押動部16で、荷役物6を治具22に押し込み図9の状態する。保持機構19で治具22の先端を吸着しているので、治具22と吊り具5は離れない。荷役物6を押動する途中で、吊り具5のシャフト12の先端に移動するにつれ、シャフト12の撓み量が変化するので、ロッド15の位置に従い制御され、モータ出力を制御し、治具22と荷役物5と吊り具5のこじれが無くなる様に補正される。撓み方向表示機47では、上にこじているか、下にこじているか、こじていないかが表示により作業者8が分かる。
【0027】
図8から図9で、ロッド15の位置が150mm以上〜250mm未満の場合は、中立撓みB34に移行し、基準となる歪センサの記憶撓みに補正量Bが加算され、中立撓みBとなる。ロッド15の位置が250mm以上の場合は、中立撓みC35に移行し、基準となる歪センサ20の記憶撓みに補正量Cが加算され、中立撓みCとなる。その中立撓みB34又は中立撓みC35は、変化量36に移行される。変化量36では、現在の撓みから中立撓みB又は中立撓みCを引く。現在の撓みから中立撓みを引いて、ゼロより大きいならモータ出力下げ38に移行して、基準のモータ出力に補正値Dを足し、モータ出力を下げる信号を出す。変化量が、ゼロより大きい場合は、吊り具5が治具22より上の位置の状態でこじている。よって、モータ出力下げ38からモータ出力42に移行して、モータの出力を下げる事により、治具22と吊り具5の位置が適正となる。また、吊り具5が下がり過ぎて、吊り具5が治具22より下の位置の状態でこじたら、変化量はゼロ未満となり、撓み方向39からモータ出力上げ40に移行して、基準のモータ出力に補正値Eを加算し、モータの出力を上げる信号を出す。変化量が、ゼロより小さい場合は、吊り具5が治具22より下の位置の状態でこじている。よって、モータ出力上げ40からモータ出力42に移行して、モータの出力を上げる事により、治具22と吊り具5の位置が適正となる。また、変化量がゼロの場合は、治具22と吊り具5の位置が適正であり、モータ出力42に移行して、基準のモータ出力を維持する信号を出す。撓み方向表示機47では、上にこじているか、下にこじているか、こじていないかが表示により作業者8が分かる。
【0028】
次に、クランプ機構17で荷役物6をアンクランプし、治具22から保持機構19を離脱させ、図10の状態にする。アンクランプすると撓み補正スイッチ(図示せず)がオフとなる。そして、次の荷役物6を移載させる。治具22に荷役物6を嵌入する時に、一瞬こじても、瞬時にモータ出力を上げる又は下げて、こじれが無い様に補正するので、治具に荷役物をスムースに嵌入する事ができる。
【産業上の利用可能性】
【0029】
円筒状のロールの実施例だが、治具と荷役物の中空部のクリアランスが小さいものであれば本発明が適用できる。
【図面の簡単な説明】
【0030】
【図1】荷役物運搬機と吊り具と荷役物の総体図である。
【図2】荷役物の斜視図である。
【図3】台の上の荷役物と台の図である。
【図4】吊り具と荷役物の図である。
【図5】吊り具と荷役物の図である。
【図6】クランプ機構の図である。
【図7】吊り具と荷役物と治具の図である。
【図8】吊り具と荷役物と治具の図である。
【図9】吊り具と荷役物と治具の図である。
【図10】吊り具と荷役物と治具の図である。
【図11】保持機構と治具の先端の断面図である。
【図12】保持機構と治具の先端の断面図である。
【図13】制御のフロー図である。
【図14】従来の吊り具である。
【図15】治具と荷役物である。
【符号の説明】
【0031】
1 荷役物運搬機
2 ポール台座
3 本体部
4 アーム
5 吊り具
6 荷役物
7 操作部
8 作業者
9 中空部
10 台
11 支持体
12 シャフト
13 スライド駆動装置
14 シリンダ
15 ロッド
16 押動部
17 クランプ機構
18 シリンダ
19 保持機構
20 歪センサ
21 モニター
22 治具
23 パッキン
24 吸着装置
25 カメラ
26 START
27 撓み補正スイッチオフ
28 撓み補正スイッチ
29 昇降モードへ
30 記憶フラグ
31 ロッド位置
32 中立撓みA
33 ロッド位置
34 中立撓みB
35 中立撓みC
36 変化量
37 撓み方向
38 モータ出力下げ
39 撓み方向
40 モータ出力上げ
41 モータ出力維持
42 モータ出力
43 END
44 撓み記憶
45 吊り具
46 記憶フラグをLからHへ
47 撓み方向表示機
【技術分野】
【0001】
本発明は、荷役物を保持して荷役物運搬機で移載し、治具に嵌入させる吊り具に関するものである。
【背景技術】
【0002】
図2は、荷役物の斜視図であり、ロール状で中が中空となっている中空部9を有している。図14は、従来の吊り具45であり、図3の台10に置いてある荷役物6を保持するには、図14の吊り具45で移載していた。荷役物6の重量が重いほど吊り具45が撓み、図14の様に荷役物4の中空部9と治具22のクリアランスが小さい場合は、荷役物6を治具22に嵌入しにくいという不具合点があった。また、図15は、治具22と荷役物6であり、一旦、治具22の一部に嵌入にても、荷役物6を完全に嵌入させるためには人で押していた。しかし、重量が相当重い場合は、人でも荷役物6が動かず、荷役物6を治具22へ完全に嵌入させることはできなかった。
【0003】
また、反転機能付きの吊り具で、角度を可変させることは可能だが、ロールの中空部と治具の寸法の差が小さい場合は、微調整ができず、こじれた方向が作業者には判断できない為、治具と荷役物がこじてしまうという不具合があった。
【特許文献1】特開2007−245763号公報
【0004】
重量が重い荷役物を吊った状態で、吊り具の撓み量を少なくしようとすると、吊り具を頑丈に製作する必要があり、相当重く大きくなるという不具合点があった。特に、治具と中空部のクリアランスが少ないと、吊り具の撓み量を少なくする必要があった。
【発明の開示】
【発明が解決しようとする課題】
【0005】
解決しようとする問題点は、軽量な吊り具では治具に嵌入できない点である。
【課題を解決するための手段】
【0006】
本発明は、保持機構で治具と吊り具を吸着させ、歪センサの信号を基に、昇降駆動装置の出力を補正し、押動部をスライドさせ、人の力を使わず、荷役物を治具に押し込むことを最も主要な特徴とする。
【発明の効果】
【0007】
本発明の吊り具は、重量が重い荷役物で、治具と中空部のクリアランスが少ない場合でも、荷役物重量の一部を治具に載せた場合に、昇降駆動装置の出力を補正し、吊り具の撓み量を補正するので、吊り具を軽量に製作する事ができるという利点がある。
【発明を実施するための最良の形態】
【0008】
重量が重い荷役物で、治具と中空部のクリアランスが少ない場合でも、軽量の部品で、荷役物を人の力を使わず、荷役物を治具に押し込めることを実現した。
【実施例1】
【0009】
図1は、荷役物運搬機と吊り具と荷役物の総体図である。荷役物運搬機1は、ポール台座2に本体部3が取り付けられ、本体部3にはアーム4が係合されている。本体部3の内部にアーム4を昇降させる昇降駆動装置(図示せず)を備えている。アーム4の先端には、吊り具5が取り付けられ、吊り具5は荷役物6を持ち上げている。荷役物6は断面図となっている。吊り具5の操作部7を作業者8が把持して、荷役物6を三次元に移載できる。
【0010】
図2は、荷役物の斜視図である。荷役物6はロール状であり、中空部9を備えており、中空部9に吊り具や治具を嵌入できる。
【0011】
図3は、台の上の荷役物と台の図である。台10の上に荷役物6が置いてある。荷役物6は断面図となっている。
【0012】
図4は、吊り具と荷役物の図である。吊り具5は、支持体11にシャフト12とスライド駆動装置13と操作部7が固着されている。スライド駆動装置13は、シリンダ14とロッド15と押動部16を有している。スライド駆動装置13は、ロッド15の位置を検出する位置センサ(図示せず)を備えている。後述する制御のフロー図でのロッド15の原点は、図4の状態である。
押動部16は、クランプ機構17を有している。クランプ機構17は、シリンダ18を有しており荷役物6をクランプしている。シャフト12の先端に保持機構19を有している。押動部16はシャフト12に沿ってスライドして荷役物6を押動する。シャフト12に歪センサ20が配設され、歪センサ20でシャフト12の撓み方向と撓み量を検出する。操作部7には、モニター21が配設されている。モニター21付近に、撓み方向表示機47が配設されている。撓み方向表示機47は、歪センサ20の任意の基準値に対して撓み方向を表示する。荷役物6は、一部の断面時であり、点線で示している。
【0013】
図5は、吊り具と荷役物の図である。符号は、図4と同様である。図4の状態から、スライド駆動装置13で荷役物6を押動した状態である。押動部16はシャフト12に沿ってスライドしている。
【0014】
図6は、クランプ機構の図である。クランプ機構17は、シリンダ18を有しており、図6(a)が荷役物6の中空部9をクランプした状態で、図6(b)が荷役物6の中空部9をアンクランプした状態である。
【0015】
図7は、吊り具と荷役物と治具の図である。荷役物6は断面図となっている。荷役物6に吊り具5が嵌入されている。荷役物6に治具22の一部が嵌入されている。
【0016】
図8は、吊り具と荷役物と治具の図である。荷役物6は断面図となっている。荷役物6に吊り具5が嵌入されている。荷役物6に治具22の一部が嵌入されている。
【0017】
図9は、吊り具と荷役物と治具の図である。荷役物6は断面図となっている。荷役物6に吊り具5が嵌入されている。スライド駆動装置13で荷役物6を押動した状態で、荷役物6に治具22が嵌入されている。
【0018】
図10は、吊り具と荷役物と治具の図である。荷役物は断面図となっている。荷役物6に治具22が嵌入されている。荷役物6から吊り具5が抜かれている。
【0019】
図11は、保持機構と治具の先端の断面図である。シャフト12の先端の保持機構19と治具22の先端である。保持機構19には、パッキン23と、エアを負圧して吸着できる吸着装置24と、カメラ25を配設している。カメラ25で撮影した画像をモニター21に映し出し、位置合わせの作業がしやすいようにしている。
【0020】
図12は、保持機構と治具の先端の断面図である。符号は、図11と同様である。治具22の先端に保持機構19のパッキン23が触れている状態である。吸着装置24で、負圧にすることにより、治具22と保持機構19が、密着して固着される。
【0021】
図13は、制御のフロー図である。昇降駆動装置に制御部を有している。START26から始まり、撓み補正スイッチオフ27で撓み補正スイッチがオフになっているか確認を行う。撓み補正スイッチ28でスイッチが、オンかオフかの確認を行う。撓み補正スイッチ28がオフの場合は、歪センサの信号が無関係な昇降モードへ29で荷役物運搬機1が昇降する。撓み補正スイッチ28がオンの場合は、記憶フラグ30へ移行する。記憶フラグ30で、荷役物6を吊った状態の歪センサ20の撓み量の信号を記憶していたらロッド位置31へ、歪センサ20の撓み量の信号を記憶していなかったら撓み記憶44へ移行する。撓み記憶44で、記憶撓みを決定し、記憶フラグをLからHへ46で記憶フラグ30をLからHに切替わる。記憶フラグ30がHとなり、ロッド位置31へ移行する。
【0022】
ロッド位置31では、ロッド15の原点からの移動量を判断する。ロッド15の原点からの移動量は、押動部16のスライド量と同じである。150mm未満の場合は中立撓みA32に移行する。ロッド15の移動量が150mm以上の場合は、更に、ロッド位置33に移行する。ロッド15の位置が、150mm以上250mm未満の場合は、中立撓みB34に移行する。中立撓みB34では、記憶撓みに補正量Bが加算され、中立撓みBとなる。ロッド15の位置が、250mm以上の場合は、中立撓みC35に移行する。中立撓みC35では、記憶撓みに補正量Cが加算され、中立撓みCとなる。中立撓みA32又は中立撓みB34又は中立撓みC35は、変化量36に移行する。
【0023】
変化量36では、現在の撓みから中立撓みA又は中立撓みB又は中立撓みCが引かれる。変化量36から撓み方向37へ移行される。
【0024】
撓み方向37では、変化量がゼロより大きいなら、中立撓みA又は中立撓みB又は中立撓みCより上に撓んでいると判断し、モータ出力下げ38へ移行する。モータ出力下げ38では、基準モータ出力に補正値Dを加算する。補正値Dは、負の数値である。撓み方向37では、変化量がゼロ以下なら、撓み方向39へ移行する。撓み方向で39は、変化量がゼロより小さいなら、中立撓みA又は中立撓みB又は中立撓みCより下に撓んでいると判断し、モータ出力上げ40へ移行する。モータ出力の上げ40では、基準モータ出力に補正値Eを加算する。撓み方向39では、変化量がゼロなら、中立撓みA又は中立撓みB又は中立撓みCは撓んでいないと判断し、モータ出力維持41へ移行する。モータ出力下げ38とモータ出力上げ40とモータ出力維持41の夫々は、モータ出力42に移行される。モータ出力42では、昇降駆動装置のモータの出力を指示する。モータ出力42は、END43へ移行する。このSTART26からEND43の一連の演算は、8/1000秒間隔で演算を繰り返し、作業の間連続して制御される。
【0025】
図を用いて作用の説明する。図3の様に、台10に荷役物6が置いてある。撓みスイッチオフにしてある状態で、荷役物6の中空部9に吊り具5を嵌入させ、クランプ機構17で荷役物6をクランプして、図1の状態する。荷役物6の重みで、空荷の状態よりシャフト12が図に向かって左側に撓む。次に、操作部7の撓みスイッチ(図示せず)をオンにすると、撓みスイッチ28が記憶フラグ30に移行される。記憶フラグ30には、歪センサ20の信号が記憶されていないので、撓み記憶44に移行される。ここで、基準となる歪センサ20の撓みの記憶を行う。歪センサ20の撓み量の数値が、記憶フラグ30に記憶される。次に、図7の状態になるように、治具22の位置をカメラ25で映し、その映像をモニター21で確認して荷役物運搬機1を操作して治具22に荷役物6の中空部9を嵌入させる。図1や図7の状態では、ロッド15が伸長していないので、ロッド位置31は150mm未満であり、中立撓みA32に移行される。図7の状態で、治具22に中空部9が触れてこじれると、シャフト12が上又は下に撓み、基準の記憶撓みに変化が起こる。変化量36では、現在の撓みから中立撓みを引く。現在の撓みから中立撓みを引いて、ゼロより大きいならモータ出力下げ38に移行して、基準のモータ出力に補正値Dを足し、モータ出力を下げる信号を出す。変化量36が、ゼロより大きい場合は、吊り具5が治具22より上の位置の状態でこじている。よって、モータ出力下げ38からモータ出力42に移行して、昇降駆動装置のモータの出力を下げる事により、治具22と吊り具5の位置が適正となる。また、吊り具5が下がり過ぎて、吊り具5が治具22より下の位置の状態でこじたら、変化量はゼロ未満となり、撓み方向39からモータ出力上げ40に移行して、基準のモータ出力に補正値Eを加算し、モータの出力を上げる信号を出す。変化量が、ゼロより小さい場合は、吊り具5が治具22より下の位置の状態でこじている。よって、モータ出力上げ40からモータ出力42に移行して、モータの出力を上げる事により、治具22と吊り具5の位置が適正となる。また、変化量がゼロの場合は、治具22と吊り具5の位置が適正であり、モータ出力42に移行して、基準のモータ出力を維持する信号を出す。8/1000秒に1度の割合で瞬時に演算しているので、上にこじても補正し、下にこじても補正するので、スムースに中空部9が治具22に嵌入できる。撓み方向表示機47では、上にこじているか、下にこじているか、こじていないかが表示により作業者8が分かる。
【0026】
次に、更に図8の状態まで荷役物6を嵌入させる。保持機構19の吸着装置24で、治具22の先端を吸着させる。次にスライド駆動装置13の押動部16で、荷役物6を治具22に押し込み図9の状態する。保持機構19で治具22の先端を吸着しているので、治具22と吊り具5は離れない。荷役物6を押動する途中で、吊り具5のシャフト12の先端に移動するにつれ、シャフト12の撓み量が変化するので、ロッド15の位置に従い制御され、モータ出力を制御し、治具22と荷役物5と吊り具5のこじれが無くなる様に補正される。撓み方向表示機47では、上にこじているか、下にこじているか、こじていないかが表示により作業者8が分かる。
【0027】
図8から図9で、ロッド15の位置が150mm以上〜250mm未満の場合は、中立撓みB34に移行し、基準となる歪センサの記憶撓みに補正量Bが加算され、中立撓みBとなる。ロッド15の位置が250mm以上の場合は、中立撓みC35に移行し、基準となる歪センサ20の記憶撓みに補正量Cが加算され、中立撓みCとなる。その中立撓みB34又は中立撓みC35は、変化量36に移行される。変化量36では、現在の撓みから中立撓みB又は中立撓みCを引く。現在の撓みから中立撓みを引いて、ゼロより大きいならモータ出力下げ38に移行して、基準のモータ出力に補正値Dを足し、モータ出力を下げる信号を出す。変化量が、ゼロより大きい場合は、吊り具5が治具22より上の位置の状態でこじている。よって、モータ出力下げ38からモータ出力42に移行して、モータの出力を下げる事により、治具22と吊り具5の位置が適正となる。また、吊り具5が下がり過ぎて、吊り具5が治具22より下の位置の状態でこじたら、変化量はゼロ未満となり、撓み方向39からモータ出力上げ40に移行して、基準のモータ出力に補正値Eを加算し、モータの出力を上げる信号を出す。変化量が、ゼロより小さい場合は、吊り具5が治具22より下の位置の状態でこじている。よって、モータ出力上げ40からモータ出力42に移行して、モータの出力を上げる事により、治具22と吊り具5の位置が適正となる。また、変化量がゼロの場合は、治具22と吊り具5の位置が適正であり、モータ出力42に移行して、基準のモータ出力を維持する信号を出す。撓み方向表示機47では、上にこじているか、下にこじているか、こじていないかが表示により作業者8が分かる。
【0028】
次に、クランプ機構17で荷役物6をアンクランプし、治具22から保持機構19を離脱させ、図10の状態にする。アンクランプすると撓み補正スイッチ(図示せず)がオフとなる。そして、次の荷役物6を移載させる。治具22に荷役物6を嵌入する時に、一瞬こじても、瞬時にモータ出力を上げる又は下げて、こじれが無い様に補正するので、治具に荷役物をスムースに嵌入する事ができる。
【産業上の利用可能性】
【0029】
円筒状のロールの実施例だが、治具と荷役物の中空部のクリアランスが小さいものであれば本発明が適用できる。
【図面の簡単な説明】
【0030】
【図1】荷役物運搬機と吊り具と荷役物の総体図である。
【図2】荷役物の斜視図である。
【図3】台の上の荷役物と台の図である。
【図4】吊り具と荷役物の図である。
【図5】吊り具と荷役物の図である。
【図6】クランプ機構の図である。
【図7】吊り具と荷役物と治具の図である。
【図8】吊り具と荷役物と治具の図である。
【図9】吊り具と荷役物と治具の図である。
【図10】吊り具と荷役物と治具の図である。
【図11】保持機構と治具の先端の断面図である。
【図12】保持機構と治具の先端の断面図である。
【図13】制御のフロー図である。
【図14】従来の吊り具である。
【図15】治具と荷役物である。
【符号の説明】
【0031】
1 荷役物運搬機
2 ポール台座
3 本体部
4 アーム
5 吊り具
6 荷役物
7 操作部
8 作業者
9 中空部
10 台
11 支持体
12 シャフト
13 スライド駆動装置
14 シリンダ
15 ロッド
16 押動部
17 クランプ機構
18 シリンダ
19 保持機構
20 歪センサ
21 モニター
22 治具
23 パッキン
24 吸着装置
25 カメラ
26 START
27 撓み補正スイッチオフ
28 撓み補正スイッチ
29 昇降モードへ
30 記憶フラグ
31 ロッド位置
32 中立撓みA
33 ロッド位置
34 中立撓みB
35 中立撓みC
36 変化量
37 撓み方向
38 モータ出力下げ
39 撓み方向
40 モータ出力上げ
41 モータ出力維持
42 モータ出力
43 END
44 撓み記憶
45 吊り具
46 記憶フラグをLからHへ
47 撓み方向表示機
【特許請求の範囲】
【請求項1】
荷役物の中空部を保持して荷役物運搬機で移載する吊り具において、支持体にシャフトとスライド駆動装置が固着され、該シャフトの先端に保持機構を有し、該スライド駆動装置に押動部を有し、該押動部はクランプ機構を有し、該クランプ機構で該荷役物をクランプし、
該押動部は該シャフトに沿ってスライドして該荷役物を押動し、該シャフトに歪センサが配設され、該歪センサで該シャフトの撓み方向と撓み量を検出し、該歪センサの信号を基に該荷役物運搬機の昇降駆動装置の出力を補正する制御部を有し、該昇降駆動装置の出力を補正し、該荷役物を治具に嵌入させることを特徴とする荷役物運搬機の吊り具。
【請求項2】
該押動部のスライド量に応じて、該昇降駆動装置の出力の補正量を制御することを特徴とする請求項1記載の荷役物運搬機の吊り具。
【請求項3】
該保持機構は、エアを負圧にして吸着することを特徴とする請求項1記載の荷役物運搬機の吊り具。
【請求項4】
該保持機構にカメラを配設し、操作部にモニターを配設したことを特徴とする請求項1記載の荷役物運搬機の吊り具。
【請求項5】
該歪センサの任意の基準値に対して撓み方向を表示する撓み方向表示機を配設することを特徴とする請求項1記載の荷役物運搬機の吊り具。
【請求項1】
荷役物の中空部を保持して荷役物運搬機で移載する吊り具において、支持体にシャフトとスライド駆動装置が固着され、該シャフトの先端に保持機構を有し、該スライド駆動装置に押動部を有し、該押動部はクランプ機構を有し、該クランプ機構で該荷役物をクランプし、
該押動部は該シャフトに沿ってスライドして該荷役物を押動し、該シャフトに歪センサが配設され、該歪センサで該シャフトの撓み方向と撓み量を検出し、該歪センサの信号を基に該荷役物運搬機の昇降駆動装置の出力を補正する制御部を有し、該昇降駆動装置の出力を補正し、該荷役物を治具に嵌入させることを特徴とする荷役物運搬機の吊り具。
【請求項2】
該押動部のスライド量に応じて、該昇降駆動装置の出力の補正量を制御することを特徴とする請求項1記載の荷役物運搬機の吊り具。
【請求項3】
該保持機構は、エアを負圧にして吸着することを特徴とする請求項1記載の荷役物運搬機の吊り具。
【請求項4】
該保持機構にカメラを配設し、操作部にモニターを配設したことを特徴とする請求項1記載の荷役物運搬機の吊り具。
【請求項5】
該歪センサの任意の基準値に対して撓み方向を表示する撓み方向表示機を配設することを特徴とする請求項1記載の荷役物運搬機の吊り具。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2010−116253(P2010−116253A)
【公開日】平成22年5月27日(2010.5.27)
【国際特許分類】
【出願番号】特願2008−291946(P2008−291946)
【出願日】平成20年11月14日(2008.11.14)
【出願人】(000100735)アイコクアルファ株式会社 (17)
【Fターム(参考)】
【公開日】平成22年5月27日(2010.5.27)
【国際特許分類】
【出願日】平成20年11月14日(2008.11.14)
【出願人】(000100735)アイコクアルファ株式会社 (17)
【Fターム(参考)】
[ Back to top ]