
荷物管理システム
【課題】 手荷物の預託手続を自動的に行うことができ、利用者は、手荷物預かりカウンタに立ち寄ることなく、搭乗口に向かうことができる荷物管理システムを提供する。
【解決手段】 制御部16により、航空券読み取り部12により読み取った搭乗券の搭乗情報を通信制御部19を介して搭乗管理システム20に送信し、搭乗管理システム20の搭乗予約情報と搭乗情報との照合が完了した後、制御部16により、搭乗情報および荷物情報が記録された荷物用RFIDタグ14を発券部15により発券し、利用者が荷物に荷物用RFIDタグ14を貼り付けた後、制御部16により、タグ通信部により荷物管理サーバ24に搭乗情報および荷物情報を送信し、荷物管理サーバ24により、搭乗管理システム20の搭乗予約情報と荷物情報とを関連づけておく。
【解決手段】 制御部16により、航空券読み取り部12により読み取った搭乗券の搭乗情報を通信制御部19を介して搭乗管理システム20に送信し、搭乗管理システム20の搭乗予約情報と搭乗情報との照合が完了した後、制御部16により、搭乗情報および荷物情報が記録された荷物用RFIDタグ14を発券部15により発券し、利用者が荷物に荷物用RFIDタグ14を貼り付けた後、制御部16により、タグ通信部により荷物管理サーバ24に搭乗情報および荷物情報を送信し、荷物管理サーバ24により、搭乗管理システム20の搭乗予約情報と荷物情報とを関連づけておく。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は荷物管理システムに係り、特に、手荷物の預託手続を自動的に行うことができ、利用者は、手荷物預かりカウンタに立ち寄ることなく、搭乗口に向かうことを可能とした荷物管理システムに関するものである。
【背景技術】
【0002】
従来から、例えば、空港などにおいて、自律移動可能に構成されたロボットにより、空港ラウンジなどのサービスエリアにいるお客に対して生活支援や飲み物、新聞などを提供したり、出発するお客の荷物を持ってきたりするサービスを行う技術が提案されている。このような技術として、従来から、サービス対象者からのサービス依頼内容を取得し、現在のサービスエリアに対応して依頼内容の実施に必要な確認項目をデータベースから取得して、確認項目に従い、サービス依頼内容から必要情報の有無を確認した後、不足情報については情報取得に最適なデバイスを選択し、そのデバイスでサービス実施に不足する情報を取得してサービスを実施するようにした技術が開示されている(例えば、特許文献1参照)。
【0003】
ここで、一般に、航空機を利用する旅客人が搭乗機内に持ち込める手荷物には、総重量と大きさによる制限があり、機内に持ち込めない手荷物に関しては、有人の手荷物預かりカウンタに搭乗客自身が持参して航空券とともに提示し、係員に預託手続を依頼するようになっている。
【0004】
このような預託手続は、手荷物預かりカウンタの係員が航空券を読み取り、搭乗客の預託手荷物の計量を行い、発券された手荷物タグを預託手荷物に貼り付けた後、手荷物を旅客手荷物ハンドリングシステムと呼ばれるチェックインコンベアラインに投入する。一方、搭乗客は手荷物タグの半券(手荷物引換証)を係員から受け取り、到着空港のバゲージクレイムコンベアに流れている手荷物のタグと照合して、預託手荷物を受け取るようにしている。そして、カウンタからチェックインコンベアラインに投入された手荷物は、待機コンベアを経由して、コレクティングコンベアに合流し、搬送コンベア・仕分け装置を経由して、荷捌き場のメイクアップコンベアに搬送される。そして、手荷物は、メイクアップコンベアにおいて、人手によりコンテナに積み込まれた後、コンテナ牽引車により搭乗機まで運ばれる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−149427号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、前記従来の手荷物の預託手続においては、ウェブチェックイン済みの搭乗券を所持している搭乗客に関しても、預託手荷物がある場合は保安検査場に行く前に、あらかじめ手荷物預かりカウンタに立ち寄る必要がある。また、空港において、チェックインする搭乗客に関しては、自動チェックイン機で搭乗券を発行した後で、手荷物預かりカウンタに行く必要がある。さらに、インラインスクリーニングが導入されていない空港においては、手荷物預かりカウンタの待ち列に並ぶ前に、預託手荷物のスクリーニングを実施しているため、手荷物の預託手続に多くの時間を要してしまうという問題を有している。
【0007】
特に、航空旅客の繁忙期などには、手荷物の預託だけで多くの時間を浪費し、搭乗客が保安検査場を経由して搭乗口に向かうにはかなりの時間が必要であり、その結果、旅客の搭乗が遅れ、旅客機の定時出発に支障を来すおそれもあるという問題を有している。一方、航空会社にとっても預託手続の自動化を進め係員を削減して人件コストの低減が望まれている。しかしながら、このような手荷物の預託手続に関して自動化を図ることのできるシステムは従来存在していなかった。
【0008】
本発明は前記した点に鑑みてなされたものであり、手荷物の預託手続を自動的に行うことができ、利用者は、手荷物預かりカウンタに立ち寄ることなく、搭乗口に向かうことができる荷物管理システムを提供することを目的とするものである。
【課題を解決するための手段】
【0009】
本発明は前記目的を達成するために、請求項1の発明に係る荷物管理システムは、各種制御を行う制御部と、各種操作を行う操作部と、搭乗券の搭乗情報を読み取る航空券読み取り部と、前記航空券読み取り部により読み取られた搭乗情報に基づいて搭乗情報および荷物情報が記録された荷物用タグを発行する発券部と、前記搭乗情報の通信を行う通信制御部と、前記搭乗情報および荷物情報の通信を行うタグ通信部と、を備えた荷物管理装置と、
搭乗予約情報があらかじめ登録されている搭乗管理システムと、
荷物情報が登録され前記搭乗管理システムと通信可能とされた荷物管理サーバと、を備え、
前記制御部は、前記航空券読み取り部により読み取った搭乗券の搭乗情報を前記通信制御部を介して前記搭乗管理システムに送信し、前記搭乗管理システムの搭乗予約情報と搭乗情報との照合が完了した後、前記制御部は、前記搭乗情報および荷物情報が記録された前記荷物用タグを前記発券部により発券し、利用者が荷物に前記荷物用タグを貼り付けた後、前記制御部は、前記タグ通信部により前記荷物管理サーバに搭乗情報および荷物情報を送信し、前記荷物管理サーバは、前記搭乗管理システムの搭乗予約情報と荷物情報とを関連づけておくことを特徴とする。
【0010】
請求項2に係る発明は、請求項1において、前記荷物管理装置は、利用者の荷物を搬送する搬送ロボットに搭載されており、前記搬送ロボットは、自立して走行可能であることを特徴とする。
【0011】
請求項3に係る発明は、請求項2において、前記搬送ロボットは、利用者の荷物を収納する荷室を備えており、前記荷室には、前記制御部により開閉制御される荷室扉が設けられていることを特徴とする。
【0012】
請求項4に係る発明は、請求項2または請求項3において、前記荷室には、内部に収納された荷物の重量を計測する重量センサが設けられており、
前記荷物管理装置は、前記重量センサにより計測された荷物の重量が規定重量を超過している場合に、料金の精算を行うカード処理部を備えていることを特徴とする。
【0013】
請求項5に係る発明は、請求項2から請求項4のいずれか一項において、前記荷室には、前記荷室の開口における荷物のはみ出しを検出する検出センサが設けられており、前記荷室には、前記荷物を送り込むフィード装置が設けられていることを特徴とする。
【0014】
請求項6に係る発明は、請求項1から請求項5のいずれか一項において、前記荷物用タグは、RFIDタグにより構成されており、前記荷物管理装置は、前記RFIDタグに前記搭乗情報および荷物情報を記録するリーダライタ装置を備えていることを特徴とする。
【0015】
請求項7に係る発明は、請求項6において、前記搬送ロボットは、前記リーダライタ装置により前記搭乗情報および荷物情報が記録される本体用RFIDタグを備えており、
前記本体用RFIDタグは、前記搬送ロボットが走行する経路の途中の設置された少なくも1つのチェックポイントのRFID送受信機と通信可能とされていることを特徴とする。
【発明の効果】
【0016】
請求項1に係る発明によれば、制御部により、航空券読み取り部により読み取った搭乗券の搭乗情報を通信制御部を介して搭乗管理システムに送信し、搭乗管理システムの搭乗予約情報と搭乗情報との照合が完了した後、制御部により、搭乗情報および荷物情報が記録された荷物用タグを発券部により発券し、利用者が荷物に荷物用タグを貼り付けた後、タグ通信部により荷物管理サーバに搭乗情報および荷物情報を送信し、荷物管理サーバにより、搭乗管理システムの搭乗予約情報と荷物情報とを関連づけておくようにしているので、搭乗券のチェックイン手続および手荷物の預託手続を自動的に行うことができ、利用者は、手荷物預かりカウンタに立ち寄ることなく、搭乗口に向かうことができ、搭乗までの時間を有効に活用することができる。また、航空会社としても、手続の自動化により手荷物預託手続に要する工程数を低減させることができるとともに、係員の削減を図ることができる。また、搬送ロボットと、搭乗管理システムおよび荷物管理サーバと連携により、搭乗管理システムの搭乗予約情報と荷物情報とを関連づけるようにしているので、ロストバゲージを著しく低減させることができる。
【0017】
請求項2に係る発明によれば、荷物管理装置を、利用者の荷物を搬送する搬送ロボットに搭載し、この搬送ロボットを自立して走行可能としているので、搭乗券のチェックイン手続および手荷物の預託手続を自動的に行うことができ、さらに、自立走行する搬送ロボットに荷物を収納した状態で、荷捌きピロティまで荷物を搬送することができるので、荷物に損傷を与えることを確実に防止することができ、しかも、搬送ロボットの制御により、荷物をあらかじめ決められた時間内で確実に処理することができる。
【0018】
請求項3に係る発明によれば、搬送ロボットに利用者の荷物を収納する荷室を設け、荷室に制御部により開閉制御される荷室扉を設けるようにしているので、搬送ロボットの荷室に荷物を収納して荷室扉を閉じた状態で、荷物を搬送することができるので、荷物に損傷を与えることなく、かつ、荷物の盗難を確実に防止した状態で、搬送することが可能となる。
【0019】
請求項4に係る発明によれば、荷室に内部に収納された荷物の重量を計測する重量センサを設け、荷物管理装置に重量センサにより計測された荷物の重量が規定重量を超過している場合に、料金の精算を行うカード処理部を設けるようにしているので、規定重量を超過した荷物の精算を容易に行うことができる。
【0020】
請求項5に係る発明によれば、荷室に荷室の開口における荷物のはみ出しを検出する検出センサを設け、荷室に荷物を送り込むフィード装置を設けるようにしているので、検出センサにより、荷室の開口において荷物がはみ出していることを検出した場合に、フィード装置により荷物を荷室の奥に送り込むことができ、荷物のはみ出しによる荷室扉の開閉異常などを確実に防止することができる。
【0021】
請求項6に係る発明によれば、荷物用タグをRFIDタグにより構成し、荷物管理装置にRFIDタグに搭乗情報および荷物情報を記録するリーダライタ装置を設けるようにしているので、荷物用RFIDタグにより、電子情報として搭乗情報および荷物情報を記録することができる。
【0022】
請求項7に係る発明によれば、搬送ロボットにリーダライタ装置により搭乗情報および荷物情報が記録される本体用RFIDタグを設け、本体用RFIDタグにより、搬送ロボットが走行する経路の途中の設置された少なくも1つのチェックポイントのRFID送受信機と通信可能としているので、搭乗管理システムの搭乗予約情報と荷物情報とを関連づけるとともに、チェックポイントのRFID送受信機により搭乗情報および荷物情報の送受信を行うことができ、荷物の搬送状態を常に監視することができ、ロストバゲージを著しく低減させることができる。
【図面の簡単な説明】
【0023】
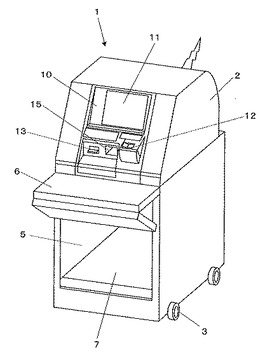
【図1】本発明に係る荷物管理システムに適用される搬送ロボットの実施形態を示す概略斜視図である。
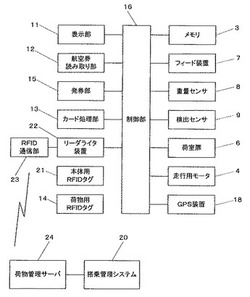
【図2】本発明に係る荷物管理システムの実施形態における制御構成を示す概略構成図である。
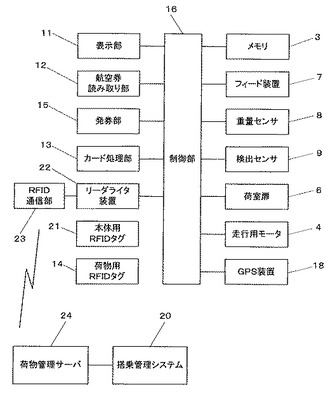
【図3】本発明に係る荷物管理システムの実施形態における荷物預託処理動作を示すフローチャートである。
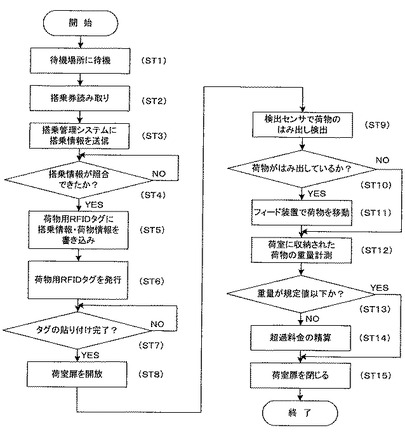
【図4】本発明に係る荷物管理システムの実施形態における搬送ロボットの移動動作を示すフローチャートである。
【発明を実施するための形態】
【0024】
以下、本発明の実施の形態について図面を参照しながら説明する。
【0025】
図1は、本発明に係る荷物管理システムにおける荷物管理装置として荷物の搬送ロボットを用いた場合の実施形態を示したものであり、搬送ロボット1は、箱型の本体2を備えている。本体2の下部には、本体2を走行させるための車輪3が取付けられている。本体2の内部には、車輪3を駆動するための走行用モータ4(図2参照)が内蔵されており、走行用モータ4を駆動することにより、搬送ロボット1を任意の方向に移動できるように構成されている。
【0026】
また、本体2の下方には、利用者の荷物を収容するための荷室5が設けられている。航空機に搭載可能な手荷物は、1個当たり15kg以下(容積500mm×600mm×1200mm以内)の物が最大3個までとされているので、本実施形態においては、荷室5の容積は、800mm×700mm×1250mm以内に形成されている。荷室5は、本体2の下方正面に開口されており、この荷室5の開口部分には、途中で折曲して上方に開放される荷室扉6が取付けられている。また、荷室5の内部には、荷室5に収容される荷物を荷室5の奥に搬送する、例えば、ベルトコンベアなどのフィード装置7が設けられており、荷室5の内部には、荷室5に収容される荷物の重量を計測する重量センサ8(図2参照)が設けられている。さらに、荷室5の開口部分には、荷室5からの荷物のはみ出しを検出する、例えば、赤外センサなど検出センサ9(図2参照)が設けられている。
【0027】
また、本体2の上部には、各種操作を行う操作部としての操作パネル10が設置されており、操作パネル10の上部には、所定の表示を行うタッチパネル式の表示部11が設置されている。また、操作パネル10には、航空券の情報を読み取る航空券読み取り部12が設置されており、本実施形態においては、航空券読み取り部12で読み取り可能な航空券としては、搭乗情報が二次元バーコードで書き込まれたeチケットや搭乗情報が書き込まれたICカードなどのIC型の航空券である必要がある。
【0028】
また、操作パネル10には、例えば、クレジットカードなどにより精算処理を行うカード処理部13が設けられている。さらに、操作パネル10には、荷物用RFIDタグ14および預託手荷物引換証などを発行する発券部15が設けられている。
【0029】
図2は、搬送ロボット1の制御構成を示したものであり、搬送ロボット1は、制御部16および所定の情報を記憶するメモリ17を備えている。また、制御部16は、走行用モータ4を駆動制御することにより、車輪3を駆動制御するように構成されている。ここで、本実施形態においては、搬送ロボット1には、この搬送ロボット1の位置情報を取得するGPS装置18が搭載されており、メモリ17には、空港のターミナルビル内の地図情報があらかじめ記憶されている。そして、GPS装置18により搬送ロボット1の現在位置を取得し、この搬送ロボット1の現在位置とメモリ17の地図情報とを照合しながら、走行用モータ4を駆動制御することにより、搬送ロボット1を目的の位置に自動的に走行させることができるように構成されている。
【0030】
ここで、搬送ロボット1の走行経路としては、例えば、利用者の荷物が預託された後、チェックインカウンターにおいて搭乗手続を行った場合に荷物を搬送するためのチェックインコンベアに替わるロボットラインに沿って移動し、インラインスクリーニングのためのX線照射式手荷物検査装置、第1のチェックポイントとしてのトンネルリーダと呼ばれるRFID送受信機、空港のチェックイン階から地上に移動する垂直自動搬送機、地上の荷捌きピロティ、第2のチェックポイントとしてのトンネルリーダ、搭乗機行きコンテナを順次走行するようになっている。
【0031】
また、制御部16は、検出センサ9からの荷室5の開口における荷物の検出信号に基づいて、荷室5のフィード装置7の動作制御および荷室扉6の開閉制御を行うように構成されている。すなわち、利用者が荷室5に荷物を収容した際に、検出センサ9により、荷物が荷室5の開口からはみ出しているか否かを検出し、荷物が荷室5の開口からはみ出していると判断した場合には、フィード装置7を動作させて荷物を荷室5の奥方向に移動させ、荷物が荷室5の開口からはみ出していないと判断した場合に、荷室扉6を閉動作させるように制御するように構成されている。
【0032】
また、制御部16は、航空券読み取り部12により、読み取られた航空券の搭乗便名、出発時刻、行き先やチェックイン状況などの搭乗情報を通信制御部19を介して搭乗管理システム20に送信するように制御するものであり、搭乗管理システム20は、あらかじめ登録されている搭乗予約情報と搬送ロボット1からの搭乗情報とを照合し、照合できればその旨を搬送ロボット1に送信する。
【0033】
また、搬送ロボット1は、本体用RFIDタグ21を備えており、搬送ロボット1は、本体用RFIDタグ21および荷物用RFIDタグ14に書き込まれた所定の情報を読み取るとともに、本体用RFIDタグ21および荷物用RFIDタグ14に所定の情報を書き込むためのリーダライタ装置22を備えている。さらに、搬送ロボット1は、本体用RFIDタグ21および荷物用RFIDタグ14書き込まれた所定の情報を送受信するためのRFID通信部23を備えている。
【0034】
また、制御部16は、搭乗情報および荷物情報が書き込まれた荷物用RFIDタグ14を発券部15により発券するように構成されている。さらに、制御部16は、制御部16は、重量センサ8による荷室5に収納された荷物の重量の計測結果を入力し、荷物の重量が規定重量を超過した場合には、カード処理部13により重量の超過分の精算処理を行うように制御するように構成されている。
【0035】
本発明に係る荷物管理システムは、荷物管理サーバ24を備えており、この荷物管理サーバ24は、搭乗管理システム20と通信可能とされている。そして、搬送ロボット1は、前述の第1のチェックポイントおよび第2のチェックポイントであるRFID送受信機を通過する際に、本体用RFIDタグ21の搭乗情報および荷物情報をRFID送受信機に送信するように構成されており、RFID送受信機は、RFID通信部23から送信された搭乗情報および荷物情報を荷物管理サーバ24に送信することができるように構成されている。荷物管理サーバ24は、RFID送受信機から搭乗情報および荷物情報が送られた場合に、搭乗管理システム20に登録されている搭乗予約情報と荷物管理サーバ24の搭乗情報および荷物情報とを関連づけるように構成されている。
【0036】
次に、本実施形態の作用について説明する。
【0037】
まず、利用者が荷物を預託する処理動作について、図3に示すフローチャートを参照して説明する。
【0038】
本実施形態においては、あらかじめ搬送ロボット1を利用する旨を利用者が予約をしておくことが必要であり、搬送ロボット1は、予約状況に従って、予約された時刻に、予約で指定された空港駅の鉄道改札口、バス、タクシーの降車口などの待機位置に待機する(ST1)。
【0039】
そして、利用者が搬送ロボット1の航空券読み取り部12に航空券をかざすと、航空券読み取り部12により、航空券の搭乗情報を読み取り(ST2)、読み取った搭乗情報を通信制御部19を介して搭乗管理システム20に送信する(ST3)。
【0040】
搭乗管理システム20は、あらかじめ登録されている搭乗予約情報と搬送ロボット1からの搭乗情報とを照合し、照合できればその旨を搬送ロボット1に送信する(ST14)。搬送ロボット1は、搭乗管理システム20の照合結果が送信されたら、所定の確認事項を表示部11に表示させる。利用者は、表示部11に表示された確認事項を了承したら、その旨表示部11のタッチパネルを操作する。利用者の確認事項の了承操作が行われたら、制御部16によりリーダライタ装置22を動作させて搭乗情報および荷物情報を本体用RFIDタグ21および荷物用RFIDタグ14に書き込み(ST5)、発券部15により、搭乗情報が書き込まれた荷物用RFIDタグ14を発行する(ST6)。利用者は、発行された荷物用RFIDタグ14を預託する荷物に装着し、表示部11に表示されている荷物用RFIDタグ14の取付け完了をタッチパネルで操作する。荷物用RFIDタグ14の取付け完了操作が行われたら(ST7)、制御部16により、荷室扉6を開放し(ST8)、利用者は、荷室5に荷物を収容する。
【0041】
そして、検出センサ9により、荷物が荷室5の開口部分からはみ出しているか否か検出し(ST9)、荷物がはみ出していると判断した場合には(ST10:YES)、フィード装置7を動作させて荷物を荷室5の奥に送り込む(ST11)。続いて、重量センサ8により、荷室5に収容された荷物の重量を計測し(ST12)、荷物の重量が規定重量を超過した場合には(ST13:NO)、カード処理部13により重量の超過分の精算処理を行う(ST14)。荷物の重量が規定重量内の場合は、表示部11の預託完了をタッチパネルで操作する。そして、荷室扉6を閉動作させ(ST15)、荷物の預託処理が完了する。
【0042】
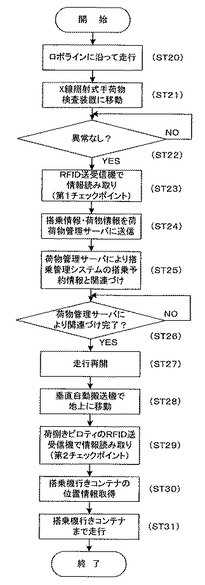
次に、搬送ロボット1の移動動作について、図4に示すフローチャートを参照して説明する。
【0043】
搬送ロボット1は、GPS装置18により搬送ロボット1の現在位置を取得し、この搬送ロボット1の現在位置とメモリ17の地図情報とを照合しながら、走行用モータ4を駆動制御することにより、搬送ロボット1を移動させる。搬送ロボット1は、ロボットラインに沿って移動し(ST20)、インラインスクリーニングのため、X線照射式手荷物検査装置を通過する(ST21)。
【0044】
X線使用者式手荷物検査装置により異常がないと判断された場合には(ST22:YES)、搬送ロボット1は、さらに移動して、第1のチェックポイントであるトンネルリーダと呼ばれるRFID送受信機を潜り、ここでRFID通信部23を介して送信される搭乗情報および荷物情報をRFID送受信機により読み取る(ST23)。そして、RFID送受信機により、搭乗情報および荷物情報が荷物管理サーバ24に送信され(ST24)、荷物管理サーバ24により、搭乗管理システム20に登録されている搭乗予約情報と荷物管理サーバ24の搭乗情報および荷物情報とを関連づける(ST25)。
【0045】
そして、荷物管理サーバ24の情報と、搭乗管理システム20の情報との関連づけが完了し、先行許可信号が荷物管理サーバ24から搬送ロボット1に送信されたら(ST26)、搬送ロボット1が、自立走行を再開する(ST27)。
【0046】
そして、搬送ロボット1は、垂直自動搬送機により地上に移動し(ST28)、地上の荷捌きピロティまで移動する。ここで、第2のチェックポイントであるトンネルリーダと呼ばれるRFID送受信機を潜り、RFID送受信機によりRFID通信部23を介して送信される搭乗情報を読み取り(ST29)、搬送ロボット1が搭乗機行きのコンテナの位置情報を取得する(ST30)。その後、搬送ロボット1は、コンテナの位置まで走行し(ST31)、搬送ロボット1の荷室扉6を開放して、人手により荷物を搭乗機行きのコンテナに積み込まれた後、コンテナ牽引車により搭乗機に運ばれる。
【0047】
以上述べたように、本実施形態においては、搬送ロボット1により、搭乗券のチェックイン手続および手荷物の預託手続を自動的に行うことができるので、利用者は、手荷物預かりカウンタに立ち寄ることなく、搭乗口に向かうことができ、搭乗までの時間を有効に活用することができる。また、航空会社としても、手続の自動化により手荷物預託手続に要する工程数を低減させることができるとともに、係員の削減を図ることができる。
【0048】
また、搬送ロボット1と、搭乗管理システム20および荷物管理サーバ24と連携により、搭乗管理システム20の搭乗予約情報と荷物情報とを関連づけるとともに、チェックポイントにより搭乗情報および荷物情報の送受信を行うようにしているので、荷物の搬送状態を常に監視することができ、ロストバゲージを著しく低減させることができる。
さらに、自立走行する搬送ロボット1に荷物を収納した状態で、荷捌きピロティまで荷物を搬送することができるので、荷物に損傷を与えることを確実に防止することができ、しかも、搬送ロボット1の制御により、荷物をあらかじめ決められた時間内で確実に処理することができる。
【0049】
なお、本実施形態においては、荷物管理装置を自立走行可能な搬送ロボット1に搭載した場合の例について説明したが、例えば、手荷物預かりカウンタに、走行機能のない操作パネル10と荷室5とを備えた荷物管理装置を設置しておき、この荷物管理装置により、搭乗券のチェックイン手続および手荷物の預託手続を自動的に行うようにしてもよい。また、この場合には、荷物用RFIDタグ14の代わりにRFIDタグを用いない荷物用タグを用いるようにしてもよい。
【0050】
また、本発明は前記実施形態に限定されるものではなく、本発明の趣旨に基づいて種々の変形が可能である。
【符号の説明】
【0051】
1 搬送ロボット
2 本体
3 車輪
4 走行用モータ
5 荷室
6 荷室扉
7 フィード装置
8 重量センサ
9 検出センサ
10 操作パネル
11 表示部
12 航空券読み取り部
13 カード処理部
14 荷物用RFIDタグ
15 発券部
16 制御部
17 メモリ
18 GPS装置
19 通信制御部
20 搭乗管理システム
21 本体用RFIDタグ
22 リーダライタ装置
23 RFID通信部
24 荷物管理サーバ
【技術分野】
【0001】
本発明は荷物管理システムに係り、特に、手荷物の預託手続を自動的に行うことができ、利用者は、手荷物預かりカウンタに立ち寄ることなく、搭乗口に向かうことを可能とした荷物管理システムに関するものである。
【背景技術】
【0002】
従来から、例えば、空港などにおいて、自律移動可能に構成されたロボットにより、空港ラウンジなどのサービスエリアにいるお客に対して生活支援や飲み物、新聞などを提供したり、出発するお客の荷物を持ってきたりするサービスを行う技術が提案されている。このような技術として、従来から、サービス対象者からのサービス依頼内容を取得し、現在のサービスエリアに対応して依頼内容の実施に必要な確認項目をデータベースから取得して、確認項目に従い、サービス依頼内容から必要情報の有無を確認した後、不足情報については情報取得に最適なデバイスを選択し、そのデバイスでサービス実施に不足する情報を取得してサービスを実施するようにした技術が開示されている(例えば、特許文献1参照)。
【0003】
ここで、一般に、航空機を利用する旅客人が搭乗機内に持ち込める手荷物には、総重量と大きさによる制限があり、機内に持ち込めない手荷物に関しては、有人の手荷物預かりカウンタに搭乗客自身が持参して航空券とともに提示し、係員に預託手続を依頼するようになっている。
【0004】
このような預託手続は、手荷物預かりカウンタの係員が航空券を読み取り、搭乗客の預託手荷物の計量を行い、発券された手荷物タグを預託手荷物に貼り付けた後、手荷物を旅客手荷物ハンドリングシステムと呼ばれるチェックインコンベアラインに投入する。一方、搭乗客は手荷物タグの半券(手荷物引換証)を係員から受け取り、到着空港のバゲージクレイムコンベアに流れている手荷物のタグと照合して、預託手荷物を受け取るようにしている。そして、カウンタからチェックインコンベアラインに投入された手荷物は、待機コンベアを経由して、コレクティングコンベアに合流し、搬送コンベア・仕分け装置を経由して、荷捌き場のメイクアップコンベアに搬送される。そして、手荷物は、メイクアップコンベアにおいて、人手によりコンテナに積み込まれた後、コンテナ牽引車により搭乗機まで運ばれる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−149427号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、前記従来の手荷物の預託手続においては、ウェブチェックイン済みの搭乗券を所持している搭乗客に関しても、預託手荷物がある場合は保安検査場に行く前に、あらかじめ手荷物預かりカウンタに立ち寄る必要がある。また、空港において、チェックインする搭乗客に関しては、自動チェックイン機で搭乗券を発行した後で、手荷物預かりカウンタに行く必要がある。さらに、インラインスクリーニングが導入されていない空港においては、手荷物預かりカウンタの待ち列に並ぶ前に、預託手荷物のスクリーニングを実施しているため、手荷物の預託手続に多くの時間を要してしまうという問題を有している。
【0007】
特に、航空旅客の繁忙期などには、手荷物の預託だけで多くの時間を浪費し、搭乗客が保安検査場を経由して搭乗口に向かうにはかなりの時間が必要であり、その結果、旅客の搭乗が遅れ、旅客機の定時出発に支障を来すおそれもあるという問題を有している。一方、航空会社にとっても預託手続の自動化を進め係員を削減して人件コストの低減が望まれている。しかしながら、このような手荷物の預託手続に関して自動化を図ることのできるシステムは従来存在していなかった。
【0008】
本発明は前記した点に鑑みてなされたものであり、手荷物の預託手続を自動的に行うことができ、利用者は、手荷物預かりカウンタに立ち寄ることなく、搭乗口に向かうことができる荷物管理システムを提供することを目的とするものである。
【課題を解決するための手段】
【0009】
本発明は前記目的を達成するために、請求項1の発明に係る荷物管理システムは、各種制御を行う制御部と、各種操作を行う操作部と、搭乗券の搭乗情報を読み取る航空券読み取り部と、前記航空券読み取り部により読み取られた搭乗情報に基づいて搭乗情報および荷物情報が記録された荷物用タグを発行する発券部と、前記搭乗情報の通信を行う通信制御部と、前記搭乗情報および荷物情報の通信を行うタグ通信部と、を備えた荷物管理装置と、
搭乗予約情報があらかじめ登録されている搭乗管理システムと、
荷物情報が登録され前記搭乗管理システムと通信可能とされた荷物管理サーバと、を備え、
前記制御部は、前記航空券読み取り部により読み取った搭乗券の搭乗情報を前記通信制御部を介して前記搭乗管理システムに送信し、前記搭乗管理システムの搭乗予約情報と搭乗情報との照合が完了した後、前記制御部は、前記搭乗情報および荷物情報が記録された前記荷物用タグを前記発券部により発券し、利用者が荷物に前記荷物用タグを貼り付けた後、前記制御部は、前記タグ通信部により前記荷物管理サーバに搭乗情報および荷物情報を送信し、前記荷物管理サーバは、前記搭乗管理システムの搭乗予約情報と荷物情報とを関連づけておくことを特徴とする。
【0010】
請求項2に係る発明は、請求項1において、前記荷物管理装置は、利用者の荷物を搬送する搬送ロボットに搭載されており、前記搬送ロボットは、自立して走行可能であることを特徴とする。
【0011】
請求項3に係る発明は、請求項2において、前記搬送ロボットは、利用者の荷物を収納する荷室を備えており、前記荷室には、前記制御部により開閉制御される荷室扉が設けられていることを特徴とする。
【0012】
請求項4に係る発明は、請求項2または請求項3において、前記荷室には、内部に収納された荷物の重量を計測する重量センサが設けられており、
前記荷物管理装置は、前記重量センサにより計測された荷物の重量が規定重量を超過している場合に、料金の精算を行うカード処理部を備えていることを特徴とする。
【0013】
請求項5に係る発明は、請求項2から請求項4のいずれか一項において、前記荷室には、前記荷室の開口における荷物のはみ出しを検出する検出センサが設けられており、前記荷室には、前記荷物を送り込むフィード装置が設けられていることを特徴とする。
【0014】
請求項6に係る発明は、請求項1から請求項5のいずれか一項において、前記荷物用タグは、RFIDタグにより構成されており、前記荷物管理装置は、前記RFIDタグに前記搭乗情報および荷物情報を記録するリーダライタ装置を備えていることを特徴とする。
【0015】
請求項7に係る発明は、請求項6において、前記搬送ロボットは、前記リーダライタ装置により前記搭乗情報および荷物情報が記録される本体用RFIDタグを備えており、
前記本体用RFIDタグは、前記搬送ロボットが走行する経路の途中の設置された少なくも1つのチェックポイントのRFID送受信機と通信可能とされていることを特徴とする。
【発明の効果】
【0016】
請求項1に係る発明によれば、制御部により、航空券読み取り部により読み取った搭乗券の搭乗情報を通信制御部を介して搭乗管理システムに送信し、搭乗管理システムの搭乗予約情報と搭乗情報との照合が完了した後、制御部により、搭乗情報および荷物情報が記録された荷物用タグを発券部により発券し、利用者が荷物に荷物用タグを貼り付けた後、タグ通信部により荷物管理サーバに搭乗情報および荷物情報を送信し、荷物管理サーバにより、搭乗管理システムの搭乗予約情報と荷物情報とを関連づけておくようにしているので、搭乗券のチェックイン手続および手荷物の預託手続を自動的に行うことができ、利用者は、手荷物預かりカウンタに立ち寄ることなく、搭乗口に向かうことができ、搭乗までの時間を有効に活用することができる。また、航空会社としても、手続の自動化により手荷物預託手続に要する工程数を低減させることができるとともに、係員の削減を図ることができる。また、搬送ロボットと、搭乗管理システムおよび荷物管理サーバと連携により、搭乗管理システムの搭乗予約情報と荷物情報とを関連づけるようにしているので、ロストバゲージを著しく低減させることができる。
【0017】
請求項2に係る発明によれば、荷物管理装置を、利用者の荷物を搬送する搬送ロボットに搭載し、この搬送ロボットを自立して走行可能としているので、搭乗券のチェックイン手続および手荷物の預託手続を自動的に行うことができ、さらに、自立走行する搬送ロボットに荷物を収納した状態で、荷捌きピロティまで荷物を搬送することができるので、荷物に損傷を与えることを確実に防止することができ、しかも、搬送ロボットの制御により、荷物をあらかじめ決められた時間内で確実に処理することができる。
【0018】
請求項3に係る発明によれば、搬送ロボットに利用者の荷物を収納する荷室を設け、荷室に制御部により開閉制御される荷室扉を設けるようにしているので、搬送ロボットの荷室に荷物を収納して荷室扉を閉じた状態で、荷物を搬送することができるので、荷物に損傷を与えることなく、かつ、荷物の盗難を確実に防止した状態で、搬送することが可能となる。
【0019】
請求項4に係る発明によれば、荷室に内部に収納された荷物の重量を計測する重量センサを設け、荷物管理装置に重量センサにより計測された荷物の重量が規定重量を超過している場合に、料金の精算を行うカード処理部を設けるようにしているので、規定重量を超過した荷物の精算を容易に行うことができる。
【0020】
請求項5に係る発明によれば、荷室に荷室の開口における荷物のはみ出しを検出する検出センサを設け、荷室に荷物を送り込むフィード装置を設けるようにしているので、検出センサにより、荷室の開口において荷物がはみ出していることを検出した場合に、フィード装置により荷物を荷室の奥に送り込むことができ、荷物のはみ出しによる荷室扉の開閉異常などを確実に防止することができる。
【0021】
請求項6に係る発明によれば、荷物用タグをRFIDタグにより構成し、荷物管理装置にRFIDタグに搭乗情報および荷物情報を記録するリーダライタ装置を設けるようにしているので、荷物用RFIDタグにより、電子情報として搭乗情報および荷物情報を記録することができる。
【0022】
請求項7に係る発明によれば、搬送ロボットにリーダライタ装置により搭乗情報および荷物情報が記録される本体用RFIDタグを設け、本体用RFIDタグにより、搬送ロボットが走行する経路の途中の設置された少なくも1つのチェックポイントのRFID送受信機と通信可能としているので、搭乗管理システムの搭乗予約情報と荷物情報とを関連づけるとともに、チェックポイントのRFID送受信機により搭乗情報および荷物情報の送受信を行うことができ、荷物の搬送状態を常に監視することができ、ロストバゲージを著しく低減させることができる。
【図面の簡単な説明】
【0023】
【図1】本発明に係る荷物管理システムに適用される搬送ロボットの実施形態を示す概略斜視図である。
【図2】本発明に係る荷物管理システムの実施形態における制御構成を示す概略構成図である。
【図3】本発明に係る荷物管理システムの実施形態における荷物預託処理動作を示すフローチャートである。
【図4】本発明に係る荷物管理システムの実施形態における搬送ロボットの移動動作を示すフローチャートである。
【発明を実施するための形態】
【0024】
以下、本発明の実施の形態について図面を参照しながら説明する。
【0025】
図1は、本発明に係る荷物管理システムにおける荷物管理装置として荷物の搬送ロボットを用いた場合の実施形態を示したものであり、搬送ロボット1は、箱型の本体2を備えている。本体2の下部には、本体2を走行させるための車輪3が取付けられている。本体2の内部には、車輪3を駆動するための走行用モータ4(図2参照)が内蔵されており、走行用モータ4を駆動することにより、搬送ロボット1を任意の方向に移動できるように構成されている。
【0026】
また、本体2の下方には、利用者の荷物を収容するための荷室5が設けられている。航空機に搭載可能な手荷物は、1個当たり15kg以下(容積500mm×600mm×1200mm以内)の物が最大3個までとされているので、本実施形態においては、荷室5の容積は、800mm×700mm×1250mm以内に形成されている。荷室5は、本体2の下方正面に開口されており、この荷室5の開口部分には、途中で折曲して上方に開放される荷室扉6が取付けられている。また、荷室5の内部には、荷室5に収容される荷物を荷室5の奥に搬送する、例えば、ベルトコンベアなどのフィード装置7が設けられており、荷室5の内部には、荷室5に収容される荷物の重量を計測する重量センサ8(図2参照)が設けられている。さらに、荷室5の開口部分には、荷室5からの荷物のはみ出しを検出する、例えば、赤外センサなど検出センサ9(図2参照)が設けられている。
【0027】
また、本体2の上部には、各種操作を行う操作部としての操作パネル10が設置されており、操作パネル10の上部には、所定の表示を行うタッチパネル式の表示部11が設置されている。また、操作パネル10には、航空券の情報を読み取る航空券読み取り部12が設置されており、本実施形態においては、航空券読み取り部12で読み取り可能な航空券としては、搭乗情報が二次元バーコードで書き込まれたeチケットや搭乗情報が書き込まれたICカードなどのIC型の航空券である必要がある。
【0028】
また、操作パネル10には、例えば、クレジットカードなどにより精算処理を行うカード処理部13が設けられている。さらに、操作パネル10には、荷物用RFIDタグ14および預託手荷物引換証などを発行する発券部15が設けられている。
【0029】
図2は、搬送ロボット1の制御構成を示したものであり、搬送ロボット1は、制御部16および所定の情報を記憶するメモリ17を備えている。また、制御部16は、走行用モータ4を駆動制御することにより、車輪3を駆動制御するように構成されている。ここで、本実施形態においては、搬送ロボット1には、この搬送ロボット1の位置情報を取得するGPS装置18が搭載されており、メモリ17には、空港のターミナルビル内の地図情報があらかじめ記憶されている。そして、GPS装置18により搬送ロボット1の現在位置を取得し、この搬送ロボット1の現在位置とメモリ17の地図情報とを照合しながら、走行用モータ4を駆動制御することにより、搬送ロボット1を目的の位置に自動的に走行させることができるように構成されている。
【0030】
ここで、搬送ロボット1の走行経路としては、例えば、利用者の荷物が預託された後、チェックインカウンターにおいて搭乗手続を行った場合に荷物を搬送するためのチェックインコンベアに替わるロボットラインに沿って移動し、インラインスクリーニングのためのX線照射式手荷物検査装置、第1のチェックポイントとしてのトンネルリーダと呼ばれるRFID送受信機、空港のチェックイン階から地上に移動する垂直自動搬送機、地上の荷捌きピロティ、第2のチェックポイントとしてのトンネルリーダ、搭乗機行きコンテナを順次走行するようになっている。
【0031】
また、制御部16は、検出センサ9からの荷室5の開口における荷物の検出信号に基づいて、荷室5のフィード装置7の動作制御および荷室扉6の開閉制御を行うように構成されている。すなわち、利用者が荷室5に荷物を収容した際に、検出センサ9により、荷物が荷室5の開口からはみ出しているか否かを検出し、荷物が荷室5の開口からはみ出していると判断した場合には、フィード装置7を動作させて荷物を荷室5の奥方向に移動させ、荷物が荷室5の開口からはみ出していないと判断した場合に、荷室扉6を閉動作させるように制御するように構成されている。
【0032】
また、制御部16は、航空券読み取り部12により、読み取られた航空券の搭乗便名、出発時刻、行き先やチェックイン状況などの搭乗情報を通信制御部19を介して搭乗管理システム20に送信するように制御するものであり、搭乗管理システム20は、あらかじめ登録されている搭乗予約情報と搬送ロボット1からの搭乗情報とを照合し、照合できればその旨を搬送ロボット1に送信する。
【0033】
また、搬送ロボット1は、本体用RFIDタグ21を備えており、搬送ロボット1は、本体用RFIDタグ21および荷物用RFIDタグ14に書き込まれた所定の情報を読み取るとともに、本体用RFIDタグ21および荷物用RFIDタグ14に所定の情報を書き込むためのリーダライタ装置22を備えている。さらに、搬送ロボット1は、本体用RFIDタグ21および荷物用RFIDタグ14書き込まれた所定の情報を送受信するためのRFID通信部23を備えている。
【0034】
また、制御部16は、搭乗情報および荷物情報が書き込まれた荷物用RFIDタグ14を発券部15により発券するように構成されている。さらに、制御部16は、制御部16は、重量センサ8による荷室5に収納された荷物の重量の計測結果を入力し、荷物の重量が規定重量を超過した場合には、カード処理部13により重量の超過分の精算処理を行うように制御するように構成されている。
【0035】
本発明に係る荷物管理システムは、荷物管理サーバ24を備えており、この荷物管理サーバ24は、搭乗管理システム20と通信可能とされている。そして、搬送ロボット1は、前述の第1のチェックポイントおよび第2のチェックポイントであるRFID送受信機を通過する際に、本体用RFIDタグ21の搭乗情報および荷物情報をRFID送受信機に送信するように構成されており、RFID送受信機は、RFID通信部23から送信された搭乗情報および荷物情報を荷物管理サーバ24に送信することができるように構成されている。荷物管理サーバ24は、RFID送受信機から搭乗情報および荷物情報が送られた場合に、搭乗管理システム20に登録されている搭乗予約情報と荷物管理サーバ24の搭乗情報および荷物情報とを関連づけるように構成されている。
【0036】
次に、本実施形態の作用について説明する。
【0037】
まず、利用者が荷物を預託する処理動作について、図3に示すフローチャートを参照して説明する。
【0038】
本実施形態においては、あらかじめ搬送ロボット1を利用する旨を利用者が予約をしておくことが必要であり、搬送ロボット1は、予約状況に従って、予約された時刻に、予約で指定された空港駅の鉄道改札口、バス、タクシーの降車口などの待機位置に待機する(ST1)。
【0039】
そして、利用者が搬送ロボット1の航空券読み取り部12に航空券をかざすと、航空券読み取り部12により、航空券の搭乗情報を読み取り(ST2)、読み取った搭乗情報を通信制御部19を介して搭乗管理システム20に送信する(ST3)。
【0040】
搭乗管理システム20は、あらかじめ登録されている搭乗予約情報と搬送ロボット1からの搭乗情報とを照合し、照合できればその旨を搬送ロボット1に送信する(ST14)。搬送ロボット1は、搭乗管理システム20の照合結果が送信されたら、所定の確認事項を表示部11に表示させる。利用者は、表示部11に表示された確認事項を了承したら、その旨表示部11のタッチパネルを操作する。利用者の確認事項の了承操作が行われたら、制御部16によりリーダライタ装置22を動作させて搭乗情報および荷物情報を本体用RFIDタグ21および荷物用RFIDタグ14に書き込み(ST5)、発券部15により、搭乗情報が書き込まれた荷物用RFIDタグ14を発行する(ST6)。利用者は、発行された荷物用RFIDタグ14を預託する荷物に装着し、表示部11に表示されている荷物用RFIDタグ14の取付け完了をタッチパネルで操作する。荷物用RFIDタグ14の取付け完了操作が行われたら(ST7)、制御部16により、荷室扉6を開放し(ST8)、利用者は、荷室5に荷物を収容する。
【0041】
そして、検出センサ9により、荷物が荷室5の開口部分からはみ出しているか否か検出し(ST9)、荷物がはみ出していると判断した場合には(ST10:YES)、フィード装置7を動作させて荷物を荷室5の奥に送り込む(ST11)。続いて、重量センサ8により、荷室5に収容された荷物の重量を計測し(ST12)、荷物の重量が規定重量を超過した場合には(ST13:NO)、カード処理部13により重量の超過分の精算処理を行う(ST14)。荷物の重量が規定重量内の場合は、表示部11の預託完了をタッチパネルで操作する。そして、荷室扉6を閉動作させ(ST15)、荷物の預託処理が完了する。
【0042】
次に、搬送ロボット1の移動動作について、図4に示すフローチャートを参照して説明する。
【0043】
搬送ロボット1は、GPS装置18により搬送ロボット1の現在位置を取得し、この搬送ロボット1の現在位置とメモリ17の地図情報とを照合しながら、走行用モータ4を駆動制御することにより、搬送ロボット1を移動させる。搬送ロボット1は、ロボットラインに沿って移動し(ST20)、インラインスクリーニングのため、X線照射式手荷物検査装置を通過する(ST21)。
【0044】
X線使用者式手荷物検査装置により異常がないと判断された場合には(ST22:YES)、搬送ロボット1は、さらに移動して、第1のチェックポイントであるトンネルリーダと呼ばれるRFID送受信機を潜り、ここでRFID通信部23を介して送信される搭乗情報および荷物情報をRFID送受信機により読み取る(ST23)。そして、RFID送受信機により、搭乗情報および荷物情報が荷物管理サーバ24に送信され(ST24)、荷物管理サーバ24により、搭乗管理システム20に登録されている搭乗予約情報と荷物管理サーバ24の搭乗情報および荷物情報とを関連づける(ST25)。
【0045】
そして、荷物管理サーバ24の情報と、搭乗管理システム20の情報との関連づけが完了し、先行許可信号が荷物管理サーバ24から搬送ロボット1に送信されたら(ST26)、搬送ロボット1が、自立走行を再開する(ST27)。
【0046】
そして、搬送ロボット1は、垂直自動搬送機により地上に移動し(ST28)、地上の荷捌きピロティまで移動する。ここで、第2のチェックポイントであるトンネルリーダと呼ばれるRFID送受信機を潜り、RFID送受信機によりRFID通信部23を介して送信される搭乗情報を読み取り(ST29)、搬送ロボット1が搭乗機行きのコンテナの位置情報を取得する(ST30)。その後、搬送ロボット1は、コンテナの位置まで走行し(ST31)、搬送ロボット1の荷室扉6を開放して、人手により荷物を搭乗機行きのコンテナに積み込まれた後、コンテナ牽引車により搭乗機に運ばれる。
【0047】
以上述べたように、本実施形態においては、搬送ロボット1により、搭乗券のチェックイン手続および手荷物の預託手続を自動的に行うことができるので、利用者は、手荷物預かりカウンタに立ち寄ることなく、搭乗口に向かうことができ、搭乗までの時間を有効に活用することができる。また、航空会社としても、手続の自動化により手荷物預託手続に要する工程数を低減させることができるとともに、係員の削減を図ることができる。
【0048】
また、搬送ロボット1と、搭乗管理システム20および荷物管理サーバ24と連携により、搭乗管理システム20の搭乗予約情報と荷物情報とを関連づけるとともに、チェックポイントにより搭乗情報および荷物情報の送受信を行うようにしているので、荷物の搬送状態を常に監視することができ、ロストバゲージを著しく低減させることができる。
さらに、自立走行する搬送ロボット1に荷物を収納した状態で、荷捌きピロティまで荷物を搬送することができるので、荷物に損傷を与えることを確実に防止することができ、しかも、搬送ロボット1の制御により、荷物をあらかじめ決められた時間内で確実に処理することができる。
【0049】
なお、本実施形態においては、荷物管理装置を自立走行可能な搬送ロボット1に搭載した場合の例について説明したが、例えば、手荷物預かりカウンタに、走行機能のない操作パネル10と荷室5とを備えた荷物管理装置を設置しておき、この荷物管理装置により、搭乗券のチェックイン手続および手荷物の預託手続を自動的に行うようにしてもよい。また、この場合には、荷物用RFIDタグ14の代わりにRFIDタグを用いない荷物用タグを用いるようにしてもよい。
【0050】
また、本発明は前記実施形態に限定されるものではなく、本発明の趣旨に基づいて種々の変形が可能である。
【符号の説明】
【0051】
1 搬送ロボット
2 本体
3 車輪
4 走行用モータ
5 荷室
6 荷室扉
7 フィード装置
8 重量センサ
9 検出センサ
10 操作パネル
11 表示部
12 航空券読み取り部
13 カード処理部
14 荷物用RFIDタグ
15 発券部
16 制御部
17 メモリ
18 GPS装置
19 通信制御部
20 搭乗管理システム
21 本体用RFIDタグ
22 リーダライタ装置
23 RFID通信部
24 荷物管理サーバ
【特許請求の範囲】
【請求項1】
各種制御を行う制御部と、各種操作を行う操作部と、搭乗券の搭乗情報を読み取る航空券読み取り部と、前記航空券読み取り部により読み取られた搭乗情報に基づいて搭乗情報および荷物情報が記録された荷物用タグを発行する発券部と、前記搭乗情報の通信を行う通信制御部と、前記搭乗情報および荷物情報の通信を行うタグ通信部と、を備えた荷物管理装置と、
搭乗予約情報があらかじめ登録されている搭乗管理システムと、
荷物情報が登録され前記搭乗管理システムと通信可能とされた荷物管理サーバと、を備え、
前記制御部は、前記航空券読み取り部により読み取った搭乗券の搭乗情報を前記通信制御部を介して前記搭乗管理システムに送信し、前記搭乗管理システムの搭乗予約情報と搭乗情報との照合が完了した後、前記制御部は、前記搭乗情報および荷物情報が記録された前記荷物用タグを前記発券部により発券し、利用者が荷物に前記荷物用タグを貼り付けた後、前記制御部は、前記タグ通信部により前記荷物管理サーバに搭乗情報および荷物情報を送信し、前記荷物管理サーバは、前記搭乗管理システムの搭乗予約情報と荷物情報とを関連づけておくことを特徴とする荷物管理システム。
【請求項2】
前記荷物管理装置は、利用者の荷物を搬送する搬送ロボットに搭載されており、前記搬送ロボットは、自立して走行可能であることを特徴とする請求項1に記載の荷物管理システム。
【請求項3】
前記搬送ロボットは、利用者の荷物を収納する荷室を備えており、前記荷室には、前記制御部により開閉制御される荷室扉が設けられていることを特徴とする請求項2に記載の荷物管理システム。
【請求項4】
前記荷室には、内部に収納された荷物の重量を計測する重量センサが設けられており、
前記荷物管理装置は、前記重量センサにより計測された荷物の重量が規定重量を超過している場合に、料金の精算を行うカード処理部を備えていることを特徴とする請求項2または請求項3に記載の荷物管理システム。
【請求項5】
前記荷室には、前記荷室の開口における荷物のはみ出しを検出する検出センサが設けられており、前記荷室には、前記荷物を送り込むフィード装置が設けられていることを特徴とする請求項2から請求項4のいずれか一項に記載の荷物管理システム。
【請求項6】
前記荷物用タグは、RFIDタグにより構成されており、前記荷物管理装置は、前記RFIDタグに前記搭乗情報および荷物情報を記録するリーダライタ装置を備えていることを特徴とする請求項1から請求項5のいずれか一項に記載の荷物管理システム。
【請求項7】
前記搬送ロボットは、前記リーダライタ装置により前記搭乗情報および荷物情報が記録される本体用RFIDタグを備えており、
前記本体用RFIDタグは、前記搬送ロボットが走行する経路の途中の設置された少なくも1つのチェックポイントのRFID送受信機と通信可能とされていることを特徴とする請求項6に記載の荷物管理システム。
【請求項1】
各種制御を行う制御部と、各種操作を行う操作部と、搭乗券の搭乗情報を読み取る航空券読み取り部と、前記航空券読み取り部により読み取られた搭乗情報に基づいて搭乗情報および荷物情報が記録された荷物用タグを発行する発券部と、前記搭乗情報の通信を行う通信制御部と、前記搭乗情報および荷物情報の通信を行うタグ通信部と、を備えた荷物管理装置と、
搭乗予約情報があらかじめ登録されている搭乗管理システムと、
荷物情報が登録され前記搭乗管理システムと通信可能とされた荷物管理サーバと、を備え、
前記制御部は、前記航空券読み取り部により読み取った搭乗券の搭乗情報を前記通信制御部を介して前記搭乗管理システムに送信し、前記搭乗管理システムの搭乗予約情報と搭乗情報との照合が完了した後、前記制御部は、前記搭乗情報および荷物情報が記録された前記荷物用タグを前記発券部により発券し、利用者が荷物に前記荷物用タグを貼り付けた後、前記制御部は、前記タグ通信部により前記荷物管理サーバに搭乗情報および荷物情報を送信し、前記荷物管理サーバは、前記搭乗管理システムの搭乗予約情報と荷物情報とを関連づけておくことを特徴とする荷物管理システム。
【請求項2】
前記荷物管理装置は、利用者の荷物を搬送する搬送ロボットに搭載されており、前記搬送ロボットは、自立して走行可能であることを特徴とする請求項1に記載の荷物管理システム。
【請求項3】
前記搬送ロボットは、利用者の荷物を収納する荷室を備えており、前記荷室には、前記制御部により開閉制御される荷室扉が設けられていることを特徴とする請求項2に記載の荷物管理システム。
【請求項4】
前記荷室には、内部に収納された荷物の重量を計測する重量センサが設けられており、
前記荷物管理装置は、前記重量センサにより計測された荷物の重量が規定重量を超過している場合に、料金の精算を行うカード処理部を備えていることを特徴とする請求項2または請求項3に記載の荷物管理システム。
【請求項5】
前記荷室には、前記荷室の開口における荷物のはみ出しを検出する検出センサが設けられており、前記荷室には、前記荷物を送り込むフィード装置が設けられていることを特徴とする請求項2から請求項4のいずれか一項に記載の荷物管理システム。
【請求項6】
前記荷物用タグは、RFIDタグにより構成されており、前記荷物管理装置は、前記RFIDタグに前記搭乗情報および荷物情報を記録するリーダライタ装置を備えていることを特徴とする請求項1から請求項5のいずれか一項に記載の荷物管理システム。
【請求項7】
前記搬送ロボットは、前記リーダライタ装置により前記搭乗情報および荷物情報が記録される本体用RFIDタグを備えており、
前記本体用RFIDタグは、前記搬送ロボットが走行する経路の途中の設置された少なくも1つのチェックポイントのRFID送受信機と通信可能とされていることを特徴とする請求項6に記載の荷物管理システム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−23363(P2013−23363A)
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願番号】特願2011−161557(P2011−161557)
【出願日】平成23年7月25日(2011.7.25)
【出願人】(000004651)日本信号株式会社 (720)
【Fターム(参考)】
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願日】平成23年7月25日(2011.7.25)
【出願人】(000004651)日本信号株式会社 (720)
【Fターム(参考)】
[ Back to top ]