
荷降ろし装置
【課題】高所で生じた廃材等の荷物を高所から降ろして、運搬車両の荷台やその他の場所に、速やかに且つ省作業で、簡単、容易に排出できる荷降ろし装置の提供を課題とする。
【解決手段】ゴンドラ10と、吊り下げ部20と、昇降駆動手段30とを有し、ゴンドラ10には回動自在に枢支された底板13を設けると共に、該底板13を枢軸の周りに底閉止位置と底開放位置とに回動させるためのリンク腕16を設け、また吊り下げ部20をゴンドラ10に対して一定の遊び区間をもって連結すると共にリンク腕16とも連結し、ゴンドラ10を上昇させる際には、吊り下げ部20を上昇させることにより、底板13を底閉止位置まで回動させた後にゴンドラ10を上昇させ、ゴンドラを下降させる際には、吊り下げ部20を降下させることにより、ゴンドラ10を降下停止位置まで降下させた後に底板13を底開放位置まで回動させる構成とした。
【解決手段】ゴンドラ10と、吊り下げ部20と、昇降駆動手段30とを有し、ゴンドラ10には回動自在に枢支された底板13を設けると共に、該底板13を枢軸の周りに底閉止位置と底開放位置とに回動させるためのリンク腕16を設け、また吊り下げ部20をゴンドラ10に対して一定の遊び区間をもって連結すると共にリンク腕16とも連結し、ゴンドラ10を上昇させる際には、吊り下げ部20を上昇させることにより、底板13を底閉止位置まで回動させた後にゴンドラ10を上昇させ、ゴンドラを下降させる際には、吊り下げ部20を降下させることにより、ゴンドラ10を降下停止位置まで降下させた後に底板13を底開放位置まで回動させる構成とした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、廃材等の荷物をビル等の高所から下方に降ろすのに用いる荷降ろし装置に関する。
【背景技術】
【0002】
ビル等の解体作業にあっては、ビル自体を崩せば良かった時代があったが、近年はビル等の解体の際に解体物やその埃等が周囲に飛散することによる環境汚染を防止するため、解体物をできるだけ粉砕、飛散させることなく回収して、しかるべき廃棄場所に持ち去ることが要求されている。
このような事情に鑑み、最近はビル等の解体の際においては、上階で生じた廃材等の廃棄用物を荷物として、それ以上に粉砕、飛散させることなく地上に降ろし、トラック等の移動車に積み、運ぶことが行われている。
特開平10−218597号公報(特許文献1)には、ガイド用ポール(2)にガイドされて昇降する荷揚機の荷台装置が開示されている。
特開2002−234693号公報(特許文献2)には、ホッパーエレベータ装置として、昇降する昇降ホッパ(7)を設け、この昇降ホッパ(7)が所定高さまで上昇した際に、押杆部材28によって封鎖板(20)を付勢力に抗して開放し、排出用開口(7a)を開くようにした装置が開示されている。
特開2006−22534号公報(特許文献3)には、建物の解体方法として、建物の外に立設したタワークレーン(A)で揚重用大型リフト(B)を構築して、この揚重用大型リフト(B)で解体用重機(C)やダンプ車(D)や解体材を昇降するようにした方法が開示されている。
特開2007−23702号公報(特許文献4)には、高層建築用足場の構築方法及び解体方法として、昇降台(3)をワイヤーロープ(7)でガイドパイプ(11)に沿って昇降させ、足場用資材等を荷揚げ或いは荷降ろしする方法が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平10−218597号公報
【特許文献2】特開2002−234693号公報
【特許文献3】特開2006−22534号公報
【特許文献4】特開2007−23702号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1に示す荷揚機の荷台装置は、荷台(7)が荷台受け(6)に対してスライドする機構を備えて、荷台板(7b)の位置を調整できる点で荷揚げ、荷降ろしの際のメリットがあるが、荷台(7)や荷台板(7b)の構造自体は何ら変化するものではなく、荷台(7)への荷揚げ作業或いは荷台(7)からの荷降ろし作業自体が大きく軽減されるものではなく、また作業の自動化が可能となるようなものでもない。
上記特許文献2に示すホッパーエレベータ装置は、昇降ホッパ(7)が所定高さまで上昇すると、自動的に排出用開口(7a)を開くことができるものであるが、バネ付勢力を用いて封鎖板(20)の開閉を行うものであることから、比較的軽い荷物の昇降には適応できるものの、大重量の荷物の昇降には適さないという問題がある。
上記特許文献3に示す建物の解体方法は、解体用重機(C)やダンプ車(D)を昇降させるような揚重用大型リフト(B)を前提としたものであり、中小規模の建物の解体における荷物の昇降には適さないという問題がある。
上記特許文献4に示す高層建築用足場の構築方法及び解体方法は、昇降台(3)をワイヤーロープ(7)で吊り上げて昇降させるもので、比較的簡易に荷物を揚げ降ろしできるが、昇降台(3)に荷物を載せたり降ろしたりする際の工夫については、特に開示されてはいない。
【0005】
そこで本発明は上記従来における問題点を解決し、ビル等の解体作業等において、高所で生じた廃材等の荷物を高所から降ろして、トラック等の運搬車両の荷台やその他の場所に速やかに且つ省作業で、簡単、容易に排出することができる荷降ろし装置の提供を課題とする。
【課題を解決するための手段】
【0006】
本発明の荷降ろし装置は、廃材等の荷物をビル等の高所から下方に降ろすのに用いる荷降ろし装置であって、荷物を収容するためのゴンドラと、該ゴンドラを吊り下げる吊り下げ部と、該吊り下げ部を介して前記ゴンドラを昇降させる昇降駆動手段とを有し、前記ゴンドラには回動自在に枢支された底板を設けると共に、該底板を枢軸の周りに底閉止位置と底開放位置とに回動させるためのリンク腕を設け、且つ前記吊り下げ部を前記ゴンドラに対してその昇降方向に一定の遊び区間をもって連結すると共に前記リンク腕とも連結し、ゴンドラの上昇時には、前記吊り下げ部が前記一定の遊び区間を上昇する間に前記リンク腕を介して前記底板を底閉止位置まで回動させると共にその後にゴンドラ全体を上昇動作させ、ゴンドラの下降時には、ゴンドラ全体が降下停止位置まで降下した後、前記吊り下げ部が前記一定距離の遊び区間を下降する間に前記リンク腕を介して前記底板を底開放位置まで回動させる構成としたことを第1の特徴としている。
また本発明の荷降ろし装置は、上記第1の特徴に加えて、吊り下げ部とゴンドラとの連結は、ゴンドラを構成するフレームに設けた縦方向の長穴に対して吊り下げ部に設けた連結ピンを遊嵌することで構成し、吊り下げ部とリンク腕との連結は、前記連結ピンに対してリンク腕を連結することで構成してあることを第2の特徴としている。
また本発明の荷降ろし装置は、上記第2の特徴に加えて、長穴が設けられるフレームは、ゴンドラの幅方向の両側に配置される一対の縦フレームとすると共に該一対の縦フレームを筒状フレームとし、該筒状フレームに対して、前記吊り下げ部の両側から垂下する一対の連結杆を進退自在に挿嵌すると共に、該一対の連結杆にそれぞれ設けた連結ピンを前記長穴に遊嵌し、前記リンク腕は一対とし、その各基端側で前記各連結ピンに連結すると共に、その各先端側でそれぞれ前記底板の両側部に連結して底板を枢軸の周りに回動できるように構成してあることを第3の特徴としている。
また本発明の荷降ろし装置は、上記第1〜第3の何れかの特徴に加えて、ゴンドラの昇降を案内するガイドレールをゴンドラの両側に設けると共に、該ガイドレールにゴンドラの降下停止位置を定める停止位置決め部材を設けてあることを特徴とする第4の特徴としている。
また本発明の荷降ろし装置は、上記第1〜第4の何れかの特徴に加えて、昇降駆動手段による吊り下げ部の昇降は、遊び区間における速度が遊び区間以外での速度よりも遅くなるように構成してあることを第5の特徴としている。
【発明の効果】
【0007】
請求項1に記載の荷降ろし装置によれば、昇降駆動手段の運転によって、吊り下げ部に吊り下げられたゴンドラの全体が高所から下方に降下される。ゴンドラは降下停止位置まで降下されると停止する。このとき前記昇降駆動手段は引き続き運転状態にあるので、前記吊り下げ部は引き続き一定の遊び区間を降下する。このため前記吊り下げ部に連結されたリンク腕も下方に降下する。このリンク腕の降下により、ゴンドラの底板がゴンドラの底閉止位置から底開放位置へと自重で枢支軸の周りに回動する。
ゴンドラに載せられた廃材等の荷物は、ゴンドラの底板が開放されることで、ゴンドラの底から自動的に排出され、下で受けている運搬車の荷台やその他の収容器に移される。よってゴンドラからの排出作業が自動的となり、且つゴンドラからの排出作業或いは運搬車の荷台への移し替えを十分容易に、簡単に、且つ速やかに行うことができる。
一方、ゴンドラが降下停止位置まで降下した状態にあるときに、昇降駆動手段の運転が開始されると、吊り下げ部が上昇を開始する。しかし、この上昇は未だ遊び区間での上昇であり、ゴンドラは停止したままである。吊り下げ部が遊び区間を上昇するとき、該吊り下げ部に連結されたリンク腕が上昇され、このリンク腕の上昇により前記底板がゴンドラの底開放位置から底閉止位置へと回動される。そしてその後に、ゴンドラの全体が吊り下げ具と共に上昇される。
ゴンドラの底板は、ゴンドラ上昇に先立って、昇降駆動手段によって自動的に底閉止位置まで復帰される。よって人の手を煩わせることなく、且つ適時に、確実にゴンドラの底を閉止状態とすることができる。
よって請求項1の荷降ろし装置によれば、1つの昇降駆動手段により、底板の開閉とゴンドラの昇降とを行うことができ、高所からの速やかなる荷降ろし、荷移しを、より少人数で、簡単、容易に行うことができる。
【0008】
請求項2に記載の荷降ろし装置によれば、上記第1の特徴に加えて、吊り下げ部とゴンドラとの連結は、ゴンドラを構成するフレームに設けた縦方向の長穴に対して吊り下げ部に設けた連結ピンを遊嵌することで構成し、吊り下げ部とリンク腕との連結は、前記連結ピンに対してリンク腕を連結することで構成してあるので、ゴンドラのフレームに設けた長穴に吊り下げ部側の連結ピンを遊嵌させることで、ゴンドラと吊り下げ部との遊び区間をもった連結を現に且つ容易に可能とすることができる。
また吊り下げ部に設けた連結ピンにリンク腕を連結することで、吊り下げ部の動作にリンクした状態にリンク腕を従動させることが、現に且つ容易に可能とすることができる。そして、吊り下げ部とゴンドラとリンク腕との3者の連結構造を、長穴とそこに遊嵌される連結ピンとを介して、十分に簡素化した状態で効果的に構成することができ、全体の構造を複雑化することなく、且つ遊びを持った昇降動作と底板の開閉動作との一連の連携動作をスムーズに且つ確実に行わせることができる。
【0009】
請求項3に記載の荷降ろし装置によれば、上記請求項2に記載の構成による効果に加えて、ゴンドラの幅方向の両側に配置される一対の縦フレームに対して吊り下げ部の両側から垂下する一対の連結杆でゴンドラを吊り下げることで、ゴンドラの吊り下げを安定させることができる。特に、ゴンドラの一対の縦フレームを筒状フレームとして、これに吊り下げ部の一対の垂下する連結杆を挿嵌する構成としているので、両者の接触距離が長くなり、より安定した状態にゴンドラを吊り下げることができる。
加えて、吊り下げ部とゴンドラとの連結は、前記筒状フレームとした一対の縦フレームに対して吊り下げ部の一対の連結杆を挿嵌させ、且つその状態で、連結杆に設けた連結ピンを縦フレームに設け長穴に遊嵌させることで達成される。よって吊り下げ部の一対の連結杆が一対の縦フレームの筒内に同軸的に嵌挿された状態で、且つ両者の遊嵌関係を成立させることができる。このため、両者の遊嵌構造を非常にシンプルで且つ確実なものとすることができる。
また連結ピンに連結される前記リンク腕は、その基端側で前記連結ピンに連結すると共に、その先端側でそれぞれ前記底板の両側部に連結して底板を枢軸の周りに回動できるように構成してあるので、リンク腕による底板の回動動作を、底板の両側からバランスよく行うことができ、スムーズで安定した回動動作により底閉止位置及び底開放位置に移行させることができる。
特に、ゴンドラを昇降動作させる吊り下げ部の動作により、連結ピン、リンク腕を介してゴンドラの底板の回動も兼用して行うことができる。よってゴンドラの昇降動作に合わせた底板の回動動作を、自動的に且つ非常に簡素化させた連携動作で行うことが可能となる。
【0010】
請求項4に記載の荷降ろし装置によれば、ゴンドラの両側に設けたガイドレールによってゴンドラの昇降を案内するようにしているので、ゴンドラの昇降をガイドレールに沿って揺れたりすることなくスムーズに行うことができる。またガイドレールにゴンドラの降下を停止する停止位置決め部材を設けてあるので、ガイドレールに沿って降下してきたゴンドラを所望の降下停止位置に停止させることができる。またゴンドラの降下を停止する時期と昇降駆動装置の運転停止時期とを相互にズラすことができるので、ゴンドラが停止した後も吊り下げ具の降下を許容することができ、よってゴンドラが降下停止位置に到達した後におけるゴンドラ底板の開放動作をごく簡単な構成で、難なく、自動的に行うことができる。
勿論、停止位置決め部材によりゴンドラの降下停止位置を変更することで、ゴンドラから排出される荷物を受ける車両等の高さ等、状況に応じて、ゴンドラの降下停止位置を設定することができる。
【0011】
請求項5に記載の荷降ろし装置によれば、上記請求項1〜4の何れかに記載の構成による効果に加えて、昇降駆動手段による吊り下げ部の昇降は、前記遊び区間における速度が遊び区間以外での速度よりも遅くなるように構成してあるので、ゴンドラの底板を開けたり閉めたりする際においては、その底板の回動動作をゆっくりと安全に行うことができ、確実で安全性の高い底板の動作を保障することができる。そして遊び部区間、即ちゴンドラの底板の開け閉めが行われる区間、以外での速度を速くすることで、ゴンドラの昇降を速くすることができる。
【図面の簡単な説明】
【0012】
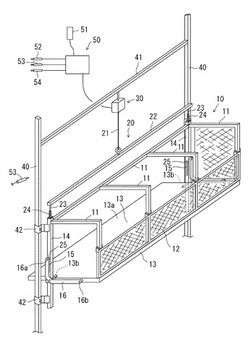
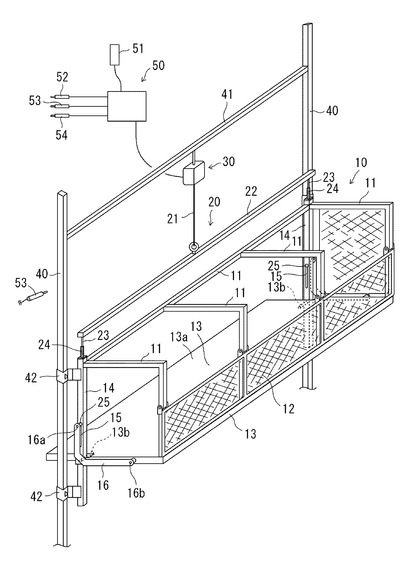
【図1】本発明の実施形態に係る荷降ろし装置の斜視図で、ゴンドラが上昇位置にある場合を示している。
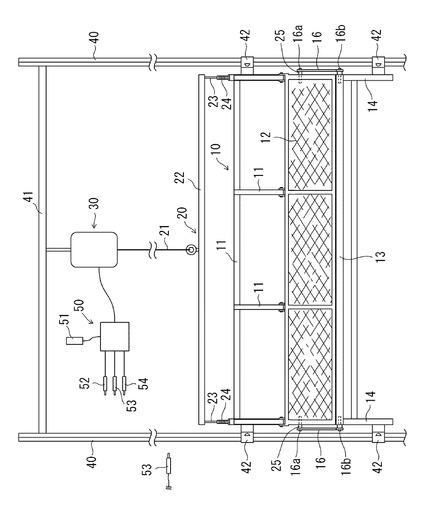
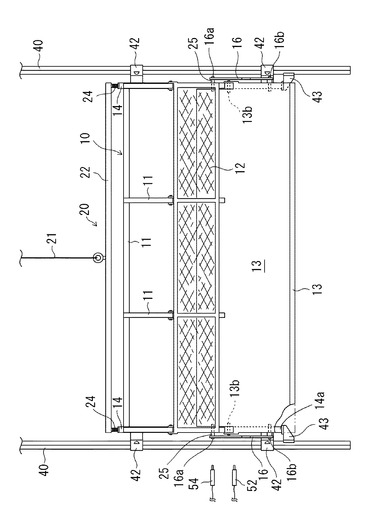
【図2】本発明の実施形態に係るに降ろし装置の正面図で、ゴンドラが上昇位置にある場合を示している。
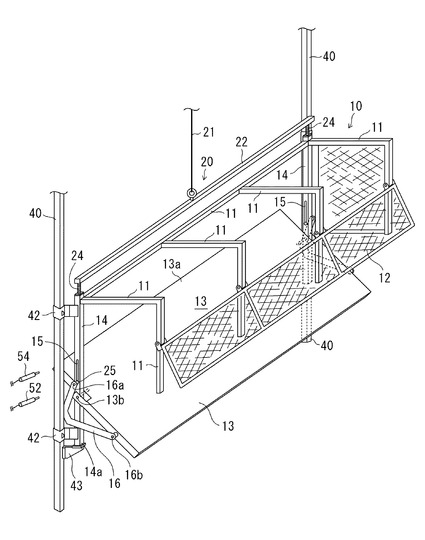
【図3】本発明の実施形態に係る荷降ろし装置の斜視図で、ゴンドラが降下した降下停止位置にある場合を示している。
【図4】本発明の実施形態に係るに降ろし装置の正面図で、ゴンドラが降下して降下停止位置にある場合を示している。
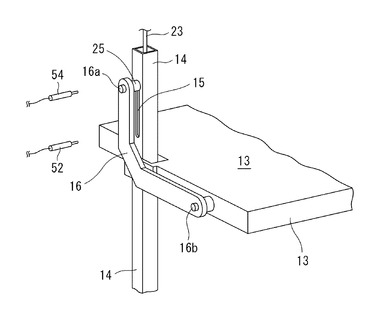
【図5】本発明の実施形態に係る荷降ろし装置の動作を説明する斜視図で、ゴンドラが降下停止位置に降下して停止した初期の状態で、底板が未だゴンドラの底閉止位置にある状態を示している。
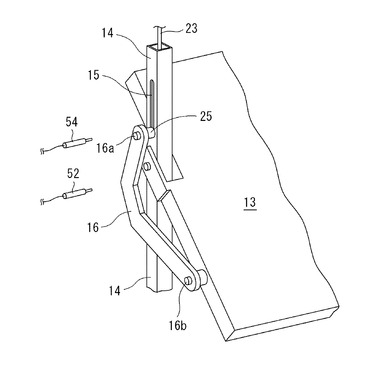
【図6】本発明の実施形態に係る荷降ろし装置の動作を説明する斜視図で、ゴンドラが降下停止位置に降下して停止した後期の状態で、底板が開いてゴンドラの底開放位置にある状態を示している。
【発明を実施するための形態】
【0013】
以下の図面を参照して、本発明に係る荷降ろし装置を説明し、本発明の理解に供する。しかし、以下の説明は本発明の特許請求の範囲に記載の発明を限定するものではない。
【0014】
先ず図1〜図4を参照し、本発明に係る荷降ろし装置は、ゴンドラ10と、該ゴンドラ10を吊り下げる吊り下げ部20と、該吊り下げ部20を介して前記ゴンドラ10を昇降させる昇降駆動手段30とを有し、更に前記ゴンドラ10の昇降を案内するガイドレール40と、前記昇降駆動手段30の運転を制御する運転制御手段50とを有する。
【0015】
前記ゴンドラ10は、廃材等の荷物を収容し、ビル等の上階である高所から地上部に降下され、荷物を降ろした後、再び廃材等の荷物が発生する高所へと上昇される。
ゴンドラ10は、前記荷物を収容するのに必要な形状をしておれば必ずしもその形状が限定されるものではないが、フレーム11や金網12、板材、その他の構成材を用いて所望の荷物収容可能な形に構成することができる。ここで収容とは、荷物を載せることを含む概念である。
本実施形態に示すゴンドラ10は、その前面側や側面側に金網12を配置して、廃材等の荷物がその降下中等にゴンドラ10の前面側から簡単に落下することがないようにすることができる。また金網12を介して中の荷物が外から見えるようにしている。なお、ゴンドラ10前面の金網12の取り付けは、図3に示すように、荷物をゴンドラ10から排出する際に、排出の邪魔とならないように、上部を枢軸として、荷物に押されると上方に跳ね上がるようにすることができる。勿論、前記金網12は、代わりに網目のない板であってもよい。
ゴンドラの背面側は、荷物をゴンドラ10に載せ易いように開放している。勿論、背面側の開放状態は、荷物を載せた後に適当に閉止状態になるように、落下防止柵等の落下防止手段を、例えば開閉自在に設けてもよい。またゴンドラ10の上面側は、荷物を入れ易いように全体が開放状態の構成とするのがよいが、本実施形態では、強度等の点から、フレーム11が適当に分散配置されている。
【0016】
前記ゴンドラ10には底板13が設けられている。この底板13上に、ゴンドラ10内に運び込まれた廃材等の荷物が載せられることになる。
本発明では、荷物を高所から下方に降下させた後、荷物をゴンドラ10から排出する際に、荷物の排出が速やかに行えるように、底板13の動きに工夫がなされている。
底板13は、ゴンドラ10の一部として、回動自在に枢支され、ゴンドラ10の底を閉止する底閉止位置とゴンドラ10の底を開放する底開放位置との間で、回動することができるように構成されている。そしてゴンドラ10が所定の位置まで降下して停止したときに、ゴンドラ10の底が自動的に開放され、廃材等の荷物が速やかに、スムーズに排出されるようにしている。
なお底板13は、ゴンドラ10の背面側にもその面積を延長して設けられ、ゴンドラ10とビル等の壁面等との間の隙間を埋めるようにしている。底板13のゴンドラ10背面側への延長部13aは伸縮可能に構成して、延長部13aの延長程度を調整できるようにしてもよい。
【0017】
前記ゴンドラ10は、その幅方向の両側に一対の縦フレームからなるメインフレーム14、14を配置している。
この一対のメインフレーム14、14に対して、前記底板13がその幅方向の対向する両側位置でそれぞれ枢支13b、13bされている。これによって底板13は前記一対の枢支13b、13b部を結ぶ線を枢支軸として、その枢支軸の周りに回動自在に構成されている。
前記底板13の回動は、該底板13が略水平位置のあるときにゴンドラ10の底を閉止する底閉止位置をとり、底板13が一定の傾斜角度で斜め下方に傾いた位置にあるときにゴンドラ10の底開放位置をとり、この底閉止位置と底開放位置の間で回動自在となる。
前記底板13の底開放位置での傾斜角度は予めその角度を設定することができる。
【0018】
前記ゴンドラ10は、前記一対のメインフレーム14、14を用いて前記吊り下げ部20に吊り下げられる構成とされている。
吊り下げ部20は、上記昇降駆動手段30によって巻き取り或いは繰り出されるチェーン21と、該チェーン21の下端に取り付けられたバランスバー22と、バランスバー22の両端付近から垂下した状態に設けられた一対の連結杆23、23とを有する。前記チェーン21はワイヤーであってもよく、要するに強度の大きい紐であればよい。
前記バランスバー22は水平方向の姿勢となるように配している。バランスバー22の長さはゴンドラ10の幅よりも少し長く構成し、その両端付近から垂下する一対の前記連結杆23が、前記ゴンドラ10の一対のメインフレーム14、14と相互に進退自在に挿嵌されるように構成している。このようにして、バランスバー22と一対の連結杆23とを用いてゴンドラ10を水平にバランスした状態に吊り下げるように構成している。
前記連結杆23は、筒状フレームとして構成されたメインフレーム14の上端から筒内に挿入された状態に嵌挿されている。連結杆23とメイン状フレーム14との嵌挿状態は、当然ながら、連結杆23とメインフレーム14とが嵌挿状態を保持した状態で、且つ相互にガタつくことなく、スムーズに相対移動できるように構成している。
なお、符号24はクッションバネで、バランスバー22とゴンドラ10のフレーム11との衝突を緩和する。
【0019】
図5、6も参照して、前記吊り下げ部20とゴンドラ10との連結は、一定の遊び区間をもって連結される構成としている。即ち、前記連結杆23とメインフレーム14とは相互に一定の遊び区間をもって連結されており、その遊び区間においては、ゴンドラ10に対して吊り下げ部20だけが移動できるようになっている。
前記遊び区間を構成するため、ゴンドラ10の一対のメインフレーム14、14には、それぞれ、縦方向の長穴15、15が設けられている。該一対の長穴15、15は同形状として、同じ縦方向長さをもつように構成している。この一対の長穴15、15は前記一対のメインフレーム14、14の同じ位置に配置される。
一方、前記一対の連結杆23には、それぞれ連結ピン25が設けられ、その連結ピン25が前記メインフレーム14の長穴15に遊嵌されている。前記連結ピン25は、連結杆23に対して不動状態に固定されて設けられてもよいし、連結ピン25が連結杆23に枢支された状態に設けられてもよい。勿論、連結杆23から連結ピン25が突出するように一体物として構成してもよい。実際には、連結ピン25は連結杆23の軸方向に対して直角方向に突出するように設け、且つ連結ピン25が前記メインフレーム14、14の長穴15を直角方向に貫通して、メインフレーム14の両側に出た状態に構成している。
連結ピン25が長穴15に遊嵌されることで、該連結ピン25は長穴15の内を縦方向に移動することが可能とさる。これによって連結杆23とメインフレーム14とが、前記長穴15の縦方向長さに相当する遊び区間において、相互に相対移動することができる構成となる。
従って、連結ピン25が長穴15内を移動している間は、例え前記吊り下げ部20が昇降駆動手段30によって上昇や降下されていても、ゴンドラ10が一緒に上昇や降下することはない。連結ピン25が長穴15の上端にまで移動して、それ以上の移動が不能になった後には、吊り下げ部20の上昇と共にゴンドラ10も一緒に上昇する。
【0020】
前記連結ピン25には、別にリンク腕16が連結されている。
リンク腕16は、前記ゴンドラ10の底板13を回動させるためのもので、底板13をゴンドラ10の底閉止位置と底開放位置との間で回動させる。
一対のリンク腕16は、その基端側において、前記長穴15から外に出た一対の連結ピン25にそれぞれに枢支16aされた状態に連結されると共に、先端側において。前記底板13の両側部に枢支16bされた状態に連結される。
連結ピン25が長穴15内をその上方へ移動すると、リンク腕16の基端側が上方へ引っ張られる。するとリンク腕16はその先端側の枢支16bを介して底板13を引っ張り、回動させる。このとき回動させる方向は、底板13がゴンドラ10の底を閉止する方向となる。即ち、連結ピン25が長穴15内を上昇することで、底板13は枢支13b、13b軸の周りにゴンドラ10の底が閉止する方向に回動するように構成されている。
一方、連結ピン25が長穴15内を下方に移動すると、リンク腕16を介して底板13が枢支13b、13b軸の周りにゴンドラ10を回動させる。このときの回動方向は、ゴンドラ10の底が開く方向である。連結ピン25の移動が停止されると、リンク腕16を介して底板13の回動も停止される。
【0021】
リンク腕16の形状は、本実施形態では、縦方向腕と横方向腕とを備えた略L字形状としている。が、このようなL字形状である必要は必ずしも必要ない。枢支16a、16bとの間を直線的につなぐような腕で構成することも可能である。但し、L字形状とすることで、リンク腕16を、長穴15の方向及び底板13の方向に沿った状態に取り付けることができ、特に連結ピン25の上下移動に対するリンク腕16の連携移動が支障なくスムーズに行え、また底板13の円滑な回動動作を確保することができる。
【0022】
前記昇降駆動手段30は、要するに前記吊り下げ部20のチェーン21を巻取り或いは繰り出すことで、吊り下げ部20を昇降させるものである。この昇降駆動手段30は、例えば電動のホイストとすることができる。
昇降駆動手段30は、前記一対のガイドレール40の上部に差し渡された天井バー41に吊り下げて配置することができる。
前記昇降駆動手段30は、勿論、前記ホイストの代りに、前記天井バー41に吊り下げられる滑車と、該滑車を介して前記吊り下げ部20のチェーン21を巻取り或いは繰り出す巻き取り器との組み合わせであってもよい。更に言えば、要するに前記チェーン21を介して吊り下げ部20を上昇及び降下させることができるものであればよい。
また前記天井バー41はガイドレール40に差し渡されたものである必要はなく、昇降駆動手段30を吊り下げることができるように固定されたものであればよい。
【0023】
前記ガイドレール40は、ゴンドラ10の昇降がスムーズに行われるように案内するものである。
ゴンドラ10の幅方向の両側に一対で立設される。このガイドレール40は、例えば解体されるビルの外壁に沿って立設される。
ガイドレール40には、摺動金具42が摺動自在に嵌め合わされて取り付けられており、この摺動金具42がゴンドラ10のメインフレーム14と結合されている。摺動金具42には車輪が設けられており、この車輪によってスムーズに摺動金具42がガイドレール40上を移動できるようになされている。
摺動金具42を介してガイドレール40に連結されたゴンドラ10は、昇降駆動手段30によって、吊り下げ部20に吊り下げられた状態で、一対のガイドレール40、40によって定められた軌道上を昇降される。
【0024】
図3、図4を参照して、前記ガイドレール40には停止位置決め部材43を取り付けている。この停止位置決め部材43はゴンドラ10の降下停止位置、即ち、ゴンドラ10が降下してきて停止する位置、を決める部材である。この停止位置決め部材43にゴンドラ10の一部が上方から当接することで、それ以上のゴンドラ10の降下が停止され、その位置に止まる。
停止位置決め部材43と当接する前記ゴンドラ10の一部は、本実施形態では、図3、図4に示すように、ゴンドラ10を構成する一対のメインフレーム14の下端部14aとしている。勿論、ゴンドラ10の別の部分が停止位置決め部材43に当接することで、ゴンドラ10の降下が停止されるようにしてもよい。
前記停止位置決め部材43によってゴンドラ10の降下が停止されるのは、前記昇降駆動手段30の運転の停止により吊り下げ部20の降下が停止されることとは異なる。昇降駆動手段30の運転停止により吊り下げ部20の降下が停止されるのは、前記ゴンドラ10が停止位置決め部材43により降下停止位置に停止された後、ゴンドラ10の底板13が所定の底開放位置まで回動した後である。
【0025】
前記運転制御手段50は、昇降駆動手段30の運転を制御するもので、該昇降駆動手段30による吊り下げ部20の上昇を開始、停止させ、また吊り下げ部20の降下を開始、停止させる。更に吊り下げ部20の上昇速度、降下速度を変更させることができる。
運転制御手段50はリモートコントローラ51を備え、作業員は、該リモートコントローラ51により吊り下げ部20の上昇及びその停止、降下及びその停止を自由に操作することができる。
【0026】
前記運転制御手段50による吊り下げ部20の降下の停止は、前記ゴンドラ10が前記停止位置決め部材43によって降下停止位置に停止された後、更に前記長穴15の遊び区間を連結ピン25とリンク腕16が降下することで、底板13がゴンドラ10の底を開放する所定の底開放位置まで回動動作されて停止した後に、速やかに自動停止されるように構成している。この自動停止には、底板13が所定の底開放位置に達したことを検出する第1センサ52を用いて行うことができる。
前記底板13が所定の底開放位置まで回動して停止するのは、前記連結ピン25が長穴15の下端に達したときである。従って前記第1センサ52を、連結ピン25の位置が検出できるように配置構成することで、前記底板13が底開放位置に達したことを検出することができる。
また第1センサ52は、前記底板13が底開放位置に停止した状態における、該底板13の姿勢或いは前記リンク腕16の姿勢を検出するように配置構成することもできる。
運転制御手段50は、吊り下げ部20の降下中において、底板13が底開放位置に達したことを第1センサ52が検出すると、昇降駆動手段30の運転を停止し、吊り下げ部20の降下を停止し、その位置に保持する。
【0027】
前記運転制御手段50による吊り下げ部20の上昇の停止は、ゴンドラ10が吊り下げ部20の上昇によって、荷物を積むべき所定の上階或いは所定の高さにまで上昇されたときに、速やかに自動停止されるように構成することができる。この自動停止には、ゴンドラ10が所定の高さまで上昇したことを検出する第2センサ53を用いて行うことができる。
第2センサ53は、ゴンドラ10が荷物を積み込むべき高さ位置に達した状態を検出するように配置構成することができる。ビルの解体等の進行に従って廃材等の荷物を積み込む高さ位置が変更されと、第2センサ53の配置構成をそれに合わせて変更する。
運転制御手段50は、吊り下げ部20の上昇中において、ゴンドラ10が所定の荷物積み込み位置まで上昇したことを第2センサ53が検出すると、昇降駆動手段30の運転を停止する。これによって吊り下げ部20及びゴンドラ10の上昇が停止され、その位置に保持された状態となる。
【0028】
前記運転制御手段50による昇降駆動手段30を介した吊り下げ部20の速度は、前記連結ピン25が前記長穴15内を移動している間、即ち、吊り下げ部20がゴンドラ10との連結において遊び区間を移動している間は、それ以外の区間での速度よりも自動的に遅くなるように構成している。これによって、ゴンドラ10の昇降は速やかに行うと共に、底板13の回動はゆっくりと行うことができる。
より詳細に述べると、運転制御手段50は、ゴンドラ10が荷物を積み込む高さ位置において停止状態にあるときに、昇降駆動手段30を介して吊り下げ部20の降下運転を開始する場合は、所定の第1速度で吊り下げ部20の降下を開始させる。吊り下げ部20の降下が開始されると、ゴンドラ10も吊り下げ部20と共に第1速度で降下する。しかし、ゴンドラ10は降下停止位置まで降下すると停止位置決め部材43によってその降下を停止される。ゴンドラ10の降下が降下停止位置で停止されると、運転制御手段50は昇降駆動手段30を介して吊り下げ部20の降下速度を第2速度に減じる。すると、この減じられた第2速度での吊り下げ部20の降下に伴い、連結ピン25が長穴15の上端から降下を開始する。それに伴って底板13が、ゴンドラ10の底閉止位置から底開放位置へと、ゆっくりとした回動を開始する。底板13の回動は、連結ピン25が長穴15の下端に達すると停止する。この停止位置が底板13によるゴンドラ10の底開放位置となる。
底板13が底開放位置に達したことを前記第1センサ52が検出すると、運転制御手段50は昇降駆動手段30の運転を停止する。これによって吊り下げ部20は降下を停止し、その位置に保持される。
【0029】
一方、ゴンドラ10が降下停止位置に停止され、且つゴンドラ10の底板が底開放位置に停止状態にあるときに、運転制御手段50により昇降駆動手段30を介して吊り下げ部20の上昇運転を開始する場合は、運転制御手段50は所定の第2速度で吊り下げ部20の上昇を開始させる。吊り下げ部20の上昇が開始されると、連結ピン25が長穴15の下端から第2速度で上昇する。この連結ピン25の上昇に伴い底板13が、ゴンドラ10の底開放位置から底閉止位置へと、ゆっくりとした回動を開始する。底板13の回動は、連結ピン25が長穴15の上端に達すると停止する。この停止位置が底板13によるゴンドラ10の底閉止位置となる。
底板13が底閉止位置に達したことを前記第1センサ52が検出すると、運転制御手段50は昇降駆動手段30を介して吊り下げ部20の上昇速度を第1速度に変更する。これによって、ゴンドラ10は吊り下げ部20と一緒に第1速度で上昇を開始する。ゴンドラ10が所定の荷物積み込み位置まで上昇したことを第2センサ53が検出すると、運転制御手段50は昇降駆動手段30の運転を停止し、吊り下げ部20とゴンドラ10の上昇を停止してその位置に保持する。
【0030】
上記、運転制御手段50による昇降駆動手段30を介した吊り下げ部20の昇降速度の自動変更は、第3センサ54を用いて、その変更のタイミングを得るようにすることができる。
前記第3センサ54による昇降速度の自動変更のタイミングは、例えばゴンドラ10が停止位置決め部材43によって降下停止位置に停止された状態にあるときに、ゴンドラ10の長穴15の上端に連結ピン25があるか否かを、第3センサ54で検出することにより行うことができる。降下停止位置にあるゴンドラ10の長穴15の上端に連結ピン25がある場合、その連結ピン25の位置は条件位置として三次元上において確定されるので、その条件位置に連結ピン25が有るか否かを検出するように第3センサ54を配置構成すればよい。
運転制御手段50は、吊り下げ部10を上昇させているときに、第3センサ54が、連結ピン25を、前記条件位置、即ち降下停止位置にあるゴンドラ10の長穴15の上端位置に検出すると、昇降駆動手段30を介して吊り下げ部20の昇降速度を第2速度から第1速度に増加させる。これによりゴンドラ10の上昇を速やかに行うことができる。なお、第3センサ54による検出から速度変更までに多少の時間的ズレを設けることができる。
運転制御手段50は、吊り下げ部10を降下させているときに、第3センサ54が連結ピン25を、前記条件位置、即ち降下停止位置にあるゴンドラ10の長穴15の上端位置に検出すると、昇降駆動手段30を介して吊り下げ部10の降下速度を第1速度から第2速度に減少させる。これによりゴンドラ10の底板13の回動動作をゆっくりと行うことができ、作業等の安全性を図ることができる。
なお、吊り下げ部10を上昇させる場合の第1速度、第2速度とそれに対応する吊り下げ部10を降下させる場合の第1速度、第2速度とは、同じ速度でなくともよい。
【0031】
前記長穴15の位置と縦方向長さは底板13の姿勢、回動量と1対1対応する。連結ピン25が長穴15の上端位置にある場合に、底板13がゴンドラ10の底を閉止する位置、即ち底閉止位置に丁度位置するよう、長穴15、底板13、リンク腕16の位置や各枢支13b、16a、16bの枢支位置を定め、また連結ピン25が長穴15の下端位置にある場合に、底板13がゴンドラ10の底を適切に開放する位置、即ち底開放位置に丁度位置するよう、長穴15、底板13、リンク腕16の位置や各枢支13b、16a、16bの枢支位置を定める。
前記底板13の底開放位置は、荷物を車両等の荷台に移す場合等を考慮して、底板13が適当な傾斜状態にある方が、底板13が垂直方向に開放しているよりも好ましい場合がある。即ち、荷物を落下排出させるのではなく、底板13で下からガイドしながら斜め方向に排出することで、衝撃なく且つスムーズに、またトラック等の荷台への移行を良好に行える。本発明では前記底板13を回動自在に枢支13bする構成とすることで、底板13の傾斜開放を可能としている。
なお、底板13の底開放位置での傾斜角度を作業時の状況に応じて適切なものに変更調整できるようにするため、前記長穴15は、それに遊嵌された連結ピン25の昇降可能範囲を変更調整できるように構成しておくのがよい。
【0032】
以上の構成からなる荷降ろし装置の操作ないし動作を説明する。
今、廃材等の荷物を積み込むために所定の高さ位置に停止しているゴンドラ10に対して、荷物が積み込まれ、作業者によりリモートコントローラ51を介して降下指令が出されると、運転制御手段50は、昇降駆動手段30を介して予め定めた第1速度でチェーン21を繰り出させ、吊り下げ部20に吊られたゴンドラ10を前記第1速度で降下させる。
ゴンドラ10が下方に降下して降下停止位置に達すると、停止位置決め部材43によってゴンドラ10が停止される。
前記ゴンドラ10が降下停止位置に達して停止した時点において、吊り下げ部20は引き続き降下を継続する。このとき、第3センサ54が、ゴンドラ10が降下停止位置に達したことを連結ピン25の位置から検出し、その情報を運転制御手段50に入力する。第3センサ54から情報を受けた運転制御手段50は、昇降駆動手段30を介して吊り下げ部20の降下速度を第1速度から第2速度に減速する。
前記ゴンドラ10が停止すると、長穴15の上端位置に遊嵌していた連結ピン25は、前記減速された第2速度で降下を開始し、これに伴いリンク腕16を介して底板13が回動を開始する。
連結ピン25が長穴15の下端に達すると、連結ピン25の降下が停止され、底板13の回動も停止される。回動が停止された底板13の位置がゴンドラ10の底開放位置となる。このとき、第1センサ52が、底板13が底開放位置に達したことを連結ピン25の位置等から検出し、その情報を運転制御手段50に入力する。第1センサ52から情報を受けた運転制御手段50は、昇降駆動手段30を介して吊り下げ部20の降下を停止する。
前記底板13が底開放位置まで開放されることで、ゴンドラ10に積まれていた廃材等の荷物の排出が行われる。
【0033】
前記荷物の排出が終り、作業者によりリモートコントローラ51を介して上昇指令が出されると、運転制御手段50は、昇降駆動手段30を介して予め定めた第2速度でチェーン21の巻上げを開始させ、吊り下げ部20を第2速度で上昇させる。
すると、ゴンドラ10の長穴15の下端位置にあった連結ピン25が第2速度で長穴15の上端位置まで上昇する。また連結ピン25にリンクしたリンク腕16を介して底板13が底開放位置から底閉止位置まで回動する。これによってゴンドラ10の底が閉止される。
第3センサ54は、ゴンドラ10が降下停止位置にあって且つ底板13が閉止された状態であることを連結ピン25の位置等から検出すると、その情報を運転制御手段50に入力する。第3センサ54から情報を受けた運転制御手段50は、昇降駆動手段30を介して吊り下げ部20の上昇速度を第2速度から第1速度に増加させる。これによりゴンドラ10は第1速度で上昇する。
ゴンドラ10の上昇中、荷物を積み込むための所定の高さ位置にゴンドラ10が上昇すると、それを第2センサ53が検出する。これによって運転制御手段50が昇降駆動手段30を介して吊り下げ部20の移動を停止する。これによってゴンドラ10が、その位置に停止する。
なお、本装置に重量センサを設けて、ゴンドラ10に一定重量以上の荷物が積み込まれた場合に昇降運転ができないよう、運転制御手段50を構成しておくこともできる。
【産業上の利用可能性】
【0034】
本発明の荷降ろし装置は、ビル等の解体時に廃材等を高所から効率よく地上に降ろして、運搬車両に移し変えたりするのに便利よく用いることができるものとして、産業上利用することができる。
【符号の説明】
【0035】
10 ゴンドラ
11 フレーム
12 金網
13 底板
13a 延長部
13b 枢支
14 メインフレーム
14a 下端部
15 長穴
16 リンク腕
16a 枢支
16b 枢支
20 吊り下げ部
21 チェーン
22 バランスバー
23 連結杆
24 クッションバネ
25 連結ピン
30 昇降駆動手段
40 ガイドレール
41 天井バー
42 摺動金具
43 停止位置決め部材
50 運転制御手段
51 リモートコントローラ
52 第1センサ
53 第2センサ
54 第3センサ
【技術分野】
【0001】
本発明は、廃材等の荷物をビル等の高所から下方に降ろすのに用いる荷降ろし装置に関する。
【背景技術】
【0002】
ビル等の解体作業にあっては、ビル自体を崩せば良かった時代があったが、近年はビル等の解体の際に解体物やその埃等が周囲に飛散することによる環境汚染を防止するため、解体物をできるだけ粉砕、飛散させることなく回収して、しかるべき廃棄場所に持ち去ることが要求されている。
このような事情に鑑み、最近はビル等の解体の際においては、上階で生じた廃材等の廃棄用物を荷物として、それ以上に粉砕、飛散させることなく地上に降ろし、トラック等の移動車に積み、運ぶことが行われている。
特開平10−218597号公報(特許文献1)には、ガイド用ポール(2)にガイドされて昇降する荷揚機の荷台装置が開示されている。
特開2002−234693号公報(特許文献2)には、ホッパーエレベータ装置として、昇降する昇降ホッパ(7)を設け、この昇降ホッパ(7)が所定高さまで上昇した際に、押杆部材28によって封鎖板(20)を付勢力に抗して開放し、排出用開口(7a)を開くようにした装置が開示されている。
特開2006−22534号公報(特許文献3)には、建物の解体方法として、建物の外に立設したタワークレーン(A)で揚重用大型リフト(B)を構築して、この揚重用大型リフト(B)で解体用重機(C)やダンプ車(D)や解体材を昇降するようにした方法が開示されている。
特開2007−23702号公報(特許文献4)には、高層建築用足場の構築方法及び解体方法として、昇降台(3)をワイヤーロープ(7)でガイドパイプ(11)に沿って昇降させ、足場用資材等を荷揚げ或いは荷降ろしする方法が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平10−218597号公報
【特許文献2】特開2002−234693号公報
【特許文献3】特開2006−22534号公報
【特許文献4】特開2007−23702号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1に示す荷揚機の荷台装置は、荷台(7)が荷台受け(6)に対してスライドする機構を備えて、荷台板(7b)の位置を調整できる点で荷揚げ、荷降ろしの際のメリットがあるが、荷台(7)や荷台板(7b)の構造自体は何ら変化するものではなく、荷台(7)への荷揚げ作業或いは荷台(7)からの荷降ろし作業自体が大きく軽減されるものではなく、また作業の自動化が可能となるようなものでもない。
上記特許文献2に示すホッパーエレベータ装置は、昇降ホッパ(7)が所定高さまで上昇すると、自動的に排出用開口(7a)を開くことができるものであるが、バネ付勢力を用いて封鎖板(20)の開閉を行うものであることから、比較的軽い荷物の昇降には適応できるものの、大重量の荷物の昇降には適さないという問題がある。
上記特許文献3に示す建物の解体方法は、解体用重機(C)やダンプ車(D)を昇降させるような揚重用大型リフト(B)を前提としたものであり、中小規模の建物の解体における荷物の昇降には適さないという問題がある。
上記特許文献4に示す高層建築用足場の構築方法及び解体方法は、昇降台(3)をワイヤーロープ(7)で吊り上げて昇降させるもので、比較的簡易に荷物を揚げ降ろしできるが、昇降台(3)に荷物を載せたり降ろしたりする際の工夫については、特に開示されてはいない。
【0005】
そこで本発明は上記従来における問題点を解決し、ビル等の解体作業等において、高所で生じた廃材等の荷物を高所から降ろして、トラック等の運搬車両の荷台やその他の場所に速やかに且つ省作業で、簡単、容易に排出することができる荷降ろし装置の提供を課題とする。
【課題を解決するための手段】
【0006】
本発明の荷降ろし装置は、廃材等の荷物をビル等の高所から下方に降ろすのに用いる荷降ろし装置であって、荷物を収容するためのゴンドラと、該ゴンドラを吊り下げる吊り下げ部と、該吊り下げ部を介して前記ゴンドラを昇降させる昇降駆動手段とを有し、前記ゴンドラには回動自在に枢支された底板を設けると共に、該底板を枢軸の周りに底閉止位置と底開放位置とに回動させるためのリンク腕を設け、且つ前記吊り下げ部を前記ゴンドラに対してその昇降方向に一定の遊び区間をもって連結すると共に前記リンク腕とも連結し、ゴンドラの上昇時には、前記吊り下げ部が前記一定の遊び区間を上昇する間に前記リンク腕を介して前記底板を底閉止位置まで回動させると共にその後にゴンドラ全体を上昇動作させ、ゴンドラの下降時には、ゴンドラ全体が降下停止位置まで降下した後、前記吊り下げ部が前記一定距離の遊び区間を下降する間に前記リンク腕を介して前記底板を底開放位置まで回動させる構成としたことを第1の特徴としている。
また本発明の荷降ろし装置は、上記第1の特徴に加えて、吊り下げ部とゴンドラとの連結は、ゴンドラを構成するフレームに設けた縦方向の長穴に対して吊り下げ部に設けた連結ピンを遊嵌することで構成し、吊り下げ部とリンク腕との連結は、前記連結ピンに対してリンク腕を連結することで構成してあることを第2の特徴としている。
また本発明の荷降ろし装置は、上記第2の特徴に加えて、長穴が設けられるフレームは、ゴンドラの幅方向の両側に配置される一対の縦フレームとすると共に該一対の縦フレームを筒状フレームとし、該筒状フレームに対して、前記吊り下げ部の両側から垂下する一対の連結杆を進退自在に挿嵌すると共に、該一対の連結杆にそれぞれ設けた連結ピンを前記長穴に遊嵌し、前記リンク腕は一対とし、その各基端側で前記各連結ピンに連結すると共に、その各先端側でそれぞれ前記底板の両側部に連結して底板を枢軸の周りに回動できるように構成してあることを第3の特徴としている。
また本発明の荷降ろし装置は、上記第1〜第3の何れかの特徴に加えて、ゴンドラの昇降を案内するガイドレールをゴンドラの両側に設けると共に、該ガイドレールにゴンドラの降下停止位置を定める停止位置決め部材を設けてあることを特徴とする第4の特徴としている。
また本発明の荷降ろし装置は、上記第1〜第4の何れかの特徴に加えて、昇降駆動手段による吊り下げ部の昇降は、遊び区間における速度が遊び区間以外での速度よりも遅くなるように構成してあることを第5の特徴としている。
【発明の効果】
【0007】
請求項1に記載の荷降ろし装置によれば、昇降駆動手段の運転によって、吊り下げ部に吊り下げられたゴンドラの全体が高所から下方に降下される。ゴンドラは降下停止位置まで降下されると停止する。このとき前記昇降駆動手段は引き続き運転状態にあるので、前記吊り下げ部は引き続き一定の遊び区間を降下する。このため前記吊り下げ部に連結されたリンク腕も下方に降下する。このリンク腕の降下により、ゴンドラの底板がゴンドラの底閉止位置から底開放位置へと自重で枢支軸の周りに回動する。
ゴンドラに載せられた廃材等の荷物は、ゴンドラの底板が開放されることで、ゴンドラの底から自動的に排出され、下で受けている運搬車の荷台やその他の収容器に移される。よってゴンドラからの排出作業が自動的となり、且つゴンドラからの排出作業或いは運搬車の荷台への移し替えを十分容易に、簡単に、且つ速やかに行うことができる。
一方、ゴンドラが降下停止位置まで降下した状態にあるときに、昇降駆動手段の運転が開始されると、吊り下げ部が上昇を開始する。しかし、この上昇は未だ遊び区間での上昇であり、ゴンドラは停止したままである。吊り下げ部が遊び区間を上昇するとき、該吊り下げ部に連結されたリンク腕が上昇され、このリンク腕の上昇により前記底板がゴンドラの底開放位置から底閉止位置へと回動される。そしてその後に、ゴンドラの全体が吊り下げ具と共に上昇される。
ゴンドラの底板は、ゴンドラ上昇に先立って、昇降駆動手段によって自動的に底閉止位置まで復帰される。よって人の手を煩わせることなく、且つ適時に、確実にゴンドラの底を閉止状態とすることができる。
よって請求項1の荷降ろし装置によれば、1つの昇降駆動手段により、底板の開閉とゴンドラの昇降とを行うことができ、高所からの速やかなる荷降ろし、荷移しを、より少人数で、簡単、容易に行うことができる。
【0008】
請求項2に記載の荷降ろし装置によれば、上記第1の特徴に加えて、吊り下げ部とゴンドラとの連結は、ゴンドラを構成するフレームに設けた縦方向の長穴に対して吊り下げ部に設けた連結ピンを遊嵌することで構成し、吊り下げ部とリンク腕との連結は、前記連結ピンに対してリンク腕を連結することで構成してあるので、ゴンドラのフレームに設けた長穴に吊り下げ部側の連結ピンを遊嵌させることで、ゴンドラと吊り下げ部との遊び区間をもった連結を現に且つ容易に可能とすることができる。
また吊り下げ部に設けた連結ピンにリンク腕を連結することで、吊り下げ部の動作にリンクした状態にリンク腕を従動させることが、現に且つ容易に可能とすることができる。そして、吊り下げ部とゴンドラとリンク腕との3者の連結構造を、長穴とそこに遊嵌される連結ピンとを介して、十分に簡素化した状態で効果的に構成することができ、全体の構造を複雑化することなく、且つ遊びを持った昇降動作と底板の開閉動作との一連の連携動作をスムーズに且つ確実に行わせることができる。
【0009】
請求項3に記載の荷降ろし装置によれば、上記請求項2に記載の構成による効果に加えて、ゴンドラの幅方向の両側に配置される一対の縦フレームに対して吊り下げ部の両側から垂下する一対の連結杆でゴンドラを吊り下げることで、ゴンドラの吊り下げを安定させることができる。特に、ゴンドラの一対の縦フレームを筒状フレームとして、これに吊り下げ部の一対の垂下する連結杆を挿嵌する構成としているので、両者の接触距離が長くなり、より安定した状態にゴンドラを吊り下げることができる。
加えて、吊り下げ部とゴンドラとの連結は、前記筒状フレームとした一対の縦フレームに対して吊り下げ部の一対の連結杆を挿嵌させ、且つその状態で、連結杆に設けた連結ピンを縦フレームに設け長穴に遊嵌させることで達成される。よって吊り下げ部の一対の連結杆が一対の縦フレームの筒内に同軸的に嵌挿された状態で、且つ両者の遊嵌関係を成立させることができる。このため、両者の遊嵌構造を非常にシンプルで且つ確実なものとすることができる。
また連結ピンに連結される前記リンク腕は、その基端側で前記連結ピンに連結すると共に、その先端側でそれぞれ前記底板の両側部に連結して底板を枢軸の周りに回動できるように構成してあるので、リンク腕による底板の回動動作を、底板の両側からバランスよく行うことができ、スムーズで安定した回動動作により底閉止位置及び底開放位置に移行させることができる。
特に、ゴンドラを昇降動作させる吊り下げ部の動作により、連結ピン、リンク腕を介してゴンドラの底板の回動も兼用して行うことができる。よってゴンドラの昇降動作に合わせた底板の回動動作を、自動的に且つ非常に簡素化させた連携動作で行うことが可能となる。
【0010】
請求項4に記載の荷降ろし装置によれば、ゴンドラの両側に設けたガイドレールによってゴンドラの昇降を案内するようにしているので、ゴンドラの昇降をガイドレールに沿って揺れたりすることなくスムーズに行うことができる。またガイドレールにゴンドラの降下を停止する停止位置決め部材を設けてあるので、ガイドレールに沿って降下してきたゴンドラを所望の降下停止位置に停止させることができる。またゴンドラの降下を停止する時期と昇降駆動装置の運転停止時期とを相互にズラすことができるので、ゴンドラが停止した後も吊り下げ具の降下を許容することができ、よってゴンドラが降下停止位置に到達した後におけるゴンドラ底板の開放動作をごく簡単な構成で、難なく、自動的に行うことができる。
勿論、停止位置決め部材によりゴンドラの降下停止位置を変更することで、ゴンドラから排出される荷物を受ける車両等の高さ等、状況に応じて、ゴンドラの降下停止位置を設定することができる。
【0011】
請求項5に記載の荷降ろし装置によれば、上記請求項1〜4の何れかに記載の構成による効果に加えて、昇降駆動手段による吊り下げ部の昇降は、前記遊び区間における速度が遊び区間以外での速度よりも遅くなるように構成してあるので、ゴンドラの底板を開けたり閉めたりする際においては、その底板の回動動作をゆっくりと安全に行うことができ、確実で安全性の高い底板の動作を保障することができる。そして遊び部区間、即ちゴンドラの底板の開け閉めが行われる区間、以外での速度を速くすることで、ゴンドラの昇降を速くすることができる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施形態に係る荷降ろし装置の斜視図で、ゴンドラが上昇位置にある場合を示している。
【図2】本発明の実施形態に係るに降ろし装置の正面図で、ゴンドラが上昇位置にある場合を示している。
【図3】本発明の実施形態に係る荷降ろし装置の斜視図で、ゴンドラが降下した降下停止位置にある場合を示している。
【図4】本発明の実施形態に係るに降ろし装置の正面図で、ゴンドラが降下して降下停止位置にある場合を示している。
【図5】本発明の実施形態に係る荷降ろし装置の動作を説明する斜視図で、ゴンドラが降下停止位置に降下して停止した初期の状態で、底板が未だゴンドラの底閉止位置にある状態を示している。
【図6】本発明の実施形態に係る荷降ろし装置の動作を説明する斜視図で、ゴンドラが降下停止位置に降下して停止した後期の状態で、底板が開いてゴンドラの底開放位置にある状態を示している。
【発明を実施するための形態】
【0013】
以下の図面を参照して、本発明に係る荷降ろし装置を説明し、本発明の理解に供する。しかし、以下の説明は本発明の特許請求の範囲に記載の発明を限定するものではない。
【0014】
先ず図1〜図4を参照し、本発明に係る荷降ろし装置は、ゴンドラ10と、該ゴンドラ10を吊り下げる吊り下げ部20と、該吊り下げ部20を介して前記ゴンドラ10を昇降させる昇降駆動手段30とを有し、更に前記ゴンドラ10の昇降を案内するガイドレール40と、前記昇降駆動手段30の運転を制御する運転制御手段50とを有する。
【0015】
前記ゴンドラ10は、廃材等の荷物を収容し、ビル等の上階である高所から地上部に降下され、荷物を降ろした後、再び廃材等の荷物が発生する高所へと上昇される。
ゴンドラ10は、前記荷物を収容するのに必要な形状をしておれば必ずしもその形状が限定されるものではないが、フレーム11や金網12、板材、その他の構成材を用いて所望の荷物収容可能な形に構成することができる。ここで収容とは、荷物を載せることを含む概念である。
本実施形態に示すゴンドラ10は、その前面側や側面側に金網12を配置して、廃材等の荷物がその降下中等にゴンドラ10の前面側から簡単に落下することがないようにすることができる。また金網12を介して中の荷物が外から見えるようにしている。なお、ゴンドラ10前面の金網12の取り付けは、図3に示すように、荷物をゴンドラ10から排出する際に、排出の邪魔とならないように、上部を枢軸として、荷物に押されると上方に跳ね上がるようにすることができる。勿論、前記金網12は、代わりに網目のない板であってもよい。
ゴンドラの背面側は、荷物をゴンドラ10に載せ易いように開放している。勿論、背面側の開放状態は、荷物を載せた後に適当に閉止状態になるように、落下防止柵等の落下防止手段を、例えば開閉自在に設けてもよい。またゴンドラ10の上面側は、荷物を入れ易いように全体が開放状態の構成とするのがよいが、本実施形態では、強度等の点から、フレーム11が適当に分散配置されている。
【0016】
前記ゴンドラ10には底板13が設けられている。この底板13上に、ゴンドラ10内に運び込まれた廃材等の荷物が載せられることになる。
本発明では、荷物を高所から下方に降下させた後、荷物をゴンドラ10から排出する際に、荷物の排出が速やかに行えるように、底板13の動きに工夫がなされている。
底板13は、ゴンドラ10の一部として、回動自在に枢支され、ゴンドラ10の底を閉止する底閉止位置とゴンドラ10の底を開放する底開放位置との間で、回動することができるように構成されている。そしてゴンドラ10が所定の位置まで降下して停止したときに、ゴンドラ10の底が自動的に開放され、廃材等の荷物が速やかに、スムーズに排出されるようにしている。
なお底板13は、ゴンドラ10の背面側にもその面積を延長して設けられ、ゴンドラ10とビル等の壁面等との間の隙間を埋めるようにしている。底板13のゴンドラ10背面側への延長部13aは伸縮可能に構成して、延長部13aの延長程度を調整できるようにしてもよい。
【0017】
前記ゴンドラ10は、その幅方向の両側に一対の縦フレームからなるメインフレーム14、14を配置している。
この一対のメインフレーム14、14に対して、前記底板13がその幅方向の対向する両側位置でそれぞれ枢支13b、13bされている。これによって底板13は前記一対の枢支13b、13b部を結ぶ線を枢支軸として、その枢支軸の周りに回動自在に構成されている。
前記底板13の回動は、該底板13が略水平位置のあるときにゴンドラ10の底を閉止する底閉止位置をとり、底板13が一定の傾斜角度で斜め下方に傾いた位置にあるときにゴンドラ10の底開放位置をとり、この底閉止位置と底開放位置の間で回動自在となる。
前記底板13の底開放位置での傾斜角度は予めその角度を設定することができる。
【0018】
前記ゴンドラ10は、前記一対のメインフレーム14、14を用いて前記吊り下げ部20に吊り下げられる構成とされている。
吊り下げ部20は、上記昇降駆動手段30によって巻き取り或いは繰り出されるチェーン21と、該チェーン21の下端に取り付けられたバランスバー22と、バランスバー22の両端付近から垂下した状態に設けられた一対の連結杆23、23とを有する。前記チェーン21はワイヤーであってもよく、要するに強度の大きい紐であればよい。
前記バランスバー22は水平方向の姿勢となるように配している。バランスバー22の長さはゴンドラ10の幅よりも少し長く構成し、その両端付近から垂下する一対の前記連結杆23が、前記ゴンドラ10の一対のメインフレーム14、14と相互に進退自在に挿嵌されるように構成している。このようにして、バランスバー22と一対の連結杆23とを用いてゴンドラ10を水平にバランスした状態に吊り下げるように構成している。
前記連結杆23は、筒状フレームとして構成されたメインフレーム14の上端から筒内に挿入された状態に嵌挿されている。連結杆23とメイン状フレーム14との嵌挿状態は、当然ながら、連結杆23とメインフレーム14とが嵌挿状態を保持した状態で、且つ相互にガタつくことなく、スムーズに相対移動できるように構成している。
なお、符号24はクッションバネで、バランスバー22とゴンドラ10のフレーム11との衝突を緩和する。
【0019】
図5、6も参照して、前記吊り下げ部20とゴンドラ10との連結は、一定の遊び区間をもって連結される構成としている。即ち、前記連結杆23とメインフレーム14とは相互に一定の遊び区間をもって連結されており、その遊び区間においては、ゴンドラ10に対して吊り下げ部20だけが移動できるようになっている。
前記遊び区間を構成するため、ゴンドラ10の一対のメインフレーム14、14には、それぞれ、縦方向の長穴15、15が設けられている。該一対の長穴15、15は同形状として、同じ縦方向長さをもつように構成している。この一対の長穴15、15は前記一対のメインフレーム14、14の同じ位置に配置される。
一方、前記一対の連結杆23には、それぞれ連結ピン25が設けられ、その連結ピン25が前記メインフレーム14の長穴15に遊嵌されている。前記連結ピン25は、連結杆23に対して不動状態に固定されて設けられてもよいし、連結ピン25が連結杆23に枢支された状態に設けられてもよい。勿論、連結杆23から連結ピン25が突出するように一体物として構成してもよい。実際には、連結ピン25は連結杆23の軸方向に対して直角方向に突出するように設け、且つ連結ピン25が前記メインフレーム14、14の長穴15を直角方向に貫通して、メインフレーム14の両側に出た状態に構成している。
連結ピン25が長穴15に遊嵌されることで、該連結ピン25は長穴15の内を縦方向に移動することが可能とさる。これによって連結杆23とメインフレーム14とが、前記長穴15の縦方向長さに相当する遊び区間において、相互に相対移動することができる構成となる。
従って、連結ピン25が長穴15内を移動している間は、例え前記吊り下げ部20が昇降駆動手段30によって上昇や降下されていても、ゴンドラ10が一緒に上昇や降下することはない。連結ピン25が長穴15の上端にまで移動して、それ以上の移動が不能になった後には、吊り下げ部20の上昇と共にゴンドラ10も一緒に上昇する。
【0020】
前記連結ピン25には、別にリンク腕16が連結されている。
リンク腕16は、前記ゴンドラ10の底板13を回動させるためのもので、底板13をゴンドラ10の底閉止位置と底開放位置との間で回動させる。
一対のリンク腕16は、その基端側において、前記長穴15から外に出た一対の連結ピン25にそれぞれに枢支16aされた状態に連結されると共に、先端側において。前記底板13の両側部に枢支16bされた状態に連結される。
連結ピン25が長穴15内をその上方へ移動すると、リンク腕16の基端側が上方へ引っ張られる。するとリンク腕16はその先端側の枢支16bを介して底板13を引っ張り、回動させる。このとき回動させる方向は、底板13がゴンドラ10の底を閉止する方向となる。即ち、連結ピン25が長穴15内を上昇することで、底板13は枢支13b、13b軸の周りにゴンドラ10の底が閉止する方向に回動するように構成されている。
一方、連結ピン25が長穴15内を下方に移動すると、リンク腕16を介して底板13が枢支13b、13b軸の周りにゴンドラ10を回動させる。このときの回動方向は、ゴンドラ10の底が開く方向である。連結ピン25の移動が停止されると、リンク腕16を介して底板13の回動も停止される。
【0021】
リンク腕16の形状は、本実施形態では、縦方向腕と横方向腕とを備えた略L字形状としている。が、このようなL字形状である必要は必ずしも必要ない。枢支16a、16bとの間を直線的につなぐような腕で構成することも可能である。但し、L字形状とすることで、リンク腕16を、長穴15の方向及び底板13の方向に沿った状態に取り付けることができ、特に連結ピン25の上下移動に対するリンク腕16の連携移動が支障なくスムーズに行え、また底板13の円滑な回動動作を確保することができる。
【0022】
前記昇降駆動手段30は、要するに前記吊り下げ部20のチェーン21を巻取り或いは繰り出すことで、吊り下げ部20を昇降させるものである。この昇降駆動手段30は、例えば電動のホイストとすることができる。
昇降駆動手段30は、前記一対のガイドレール40の上部に差し渡された天井バー41に吊り下げて配置することができる。
前記昇降駆動手段30は、勿論、前記ホイストの代りに、前記天井バー41に吊り下げられる滑車と、該滑車を介して前記吊り下げ部20のチェーン21を巻取り或いは繰り出す巻き取り器との組み合わせであってもよい。更に言えば、要するに前記チェーン21を介して吊り下げ部20を上昇及び降下させることができるものであればよい。
また前記天井バー41はガイドレール40に差し渡されたものである必要はなく、昇降駆動手段30を吊り下げることができるように固定されたものであればよい。
【0023】
前記ガイドレール40は、ゴンドラ10の昇降がスムーズに行われるように案内するものである。
ゴンドラ10の幅方向の両側に一対で立設される。このガイドレール40は、例えば解体されるビルの外壁に沿って立設される。
ガイドレール40には、摺動金具42が摺動自在に嵌め合わされて取り付けられており、この摺動金具42がゴンドラ10のメインフレーム14と結合されている。摺動金具42には車輪が設けられており、この車輪によってスムーズに摺動金具42がガイドレール40上を移動できるようになされている。
摺動金具42を介してガイドレール40に連結されたゴンドラ10は、昇降駆動手段30によって、吊り下げ部20に吊り下げられた状態で、一対のガイドレール40、40によって定められた軌道上を昇降される。
【0024】
図3、図4を参照して、前記ガイドレール40には停止位置決め部材43を取り付けている。この停止位置決め部材43はゴンドラ10の降下停止位置、即ち、ゴンドラ10が降下してきて停止する位置、を決める部材である。この停止位置決め部材43にゴンドラ10の一部が上方から当接することで、それ以上のゴンドラ10の降下が停止され、その位置に止まる。
停止位置決め部材43と当接する前記ゴンドラ10の一部は、本実施形態では、図3、図4に示すように、ゴンドラ10を構成する一対のメインフレーム14の下端部14aとしている。勿論、ゴンドラ10の別の部分が停止位置決め部材43に当接することで、ゴンドラ10の降下が停止されるようにしてもよい。
前記停止位置決め部材43によってゴンドラ10の降下が停止されるのは、前記昇降駆動手段30の運転の停止により吊り下げ部20の降下が停止されることとは異なる。昇降駆動手段30の運転停止により吊り下げ部20の降下が停止されるのは、前記ゴンドラ10が停止位置決め部材43により降下停止位置に停止された後、ゴンドラ10の底板13が所定の底開放位置まで回動した後である。
【0025】
前記運転制御手段50は、昇降駆動手段30の運転を制御するもので、該昇降駆動手段30による吊り下げ部20の上昇を開始、停止させ、また吊り下げ部20の降下を開始、停止させる。更に吊り下げ部20の上昇速度、降下速度を変更させることができる。
運転制御手段50はリモートコントローラ51を備え、作業員は、該リモートコントローラ51により吊り下げ部20の上昇及びその停止、降下及びその停止を自由に操作することができる。
【0026】
前記運転制御手段50による吊り下げ部20の降下の停止は、前記ゴンドラ10が前記停止位置決め部材43によって降下停止位置に停止された後、更に前記長穴15の遊び区間を連結ピン25とリンク腕16が降下することで、底板13がゴンドラ10の底を開放する所定の底開放位置まで回動動作されて停止した後に、速やかに自動停止されるように構成している。この自動停止には、底板13が所定の底開放位置に達したことを検出する第1センサ52を用いて行うことができる。
前記底板13が所定の底開放位置まで回動して停止するのは、前記連結ピン25が長穴15の下端に達したときである。従って前記第1センサ52を、連結ピン25の位置が検出できるように配置構成することで、前記底板13が底開放位置に達したことを検出することができる。
また第1センサ52は、前記底板13が底開放位置に停止した状態における、該底板13の姿勢或いは前記リンク腕16の姿勢を検出するように配置構成することもできる。
運転制御手段50は、吊り下げ部20の降下中において、底板13が底開放位置に達したことを第1センサ52が検出すると、昇降駆動手段30の運転を停止し、吊り下げ部20の降下を停止し、その位置に保持する。
【0027】
前記運転制御手段50による吊り下げ部20の上昇の停止は、ゴンドラ10が吊り下げ部20の上昇によって、荷物を積むべき所定の上階或いは所定の高さにまで上昇されたときに、速やかに自動停止されるように構成することができる。この自動停止には、ゴンドラ10が所定の高さまで上昇したことを検出する第2センサ53を用いて行うことができる。
第2センサ53は、ゴンドラ10が荷物を積み込むべき高さ位置に達した状態を検出するように配置構成することができる。ビルの解体等の進行に従って廃材等の荷物を積み込む高さ位置が変更されと、第2センサ53の配置構成をそれに合わせて変更する。
運転制御手段50は、吊り下げ部20の上昇中において、ゴンドラ10が所定の荷物積み込み位置まで上昇したことを第2センサ53が検出すると、昇降駆動手段30の運転を停止する。これによって吊り下げ部20及びゴンドラ10の上昇が停止され、その位置に保持された状態となる。
【0028】
前記運転制御手段50による昇降駆動手段30を介した吊り下げ部20の速度は、前記連結ピン25が前記長穴15内を移動している間、即ち、吊り下げ部20がゴンドラ10との連結において遊び区間を移動している間は、それ以外の区間での速度よりも自動的に遅くなるように構成している。これによって、ゴンドラ10の昇降は速やかに行うと共に、底板13の回動はゆっくりと行うことができる。
より詳細に述べると、運転制御手段50は、ゴンドラ10が荷物を積み込む高さ位置において停止状態にあるときに、昇降駆動手段30を介して吊り下げ部20の降下運転を開始する場合は、所定の第1速度で吊り下げ部20の降下を開始させる。吊り下げ部20の降下が開始されると、ゴンドラ10も吊り下げ部20と共に第1速度で降下する。しかし、ゴンドラ10は降下停止位置まで降下すると停止位置決め部材43によってその降下を停止される。ゴンドラ10の降下が降下停止位置で停止されると、運転制御手段50は昇降駆動手段30を介して吊り下げ部20の降下速度を第2速度に減じる。すると、この減じられた第2速度での吊り下げ部20の降下に伴い、連結ピン25が長穴15の上端から降下を開始する。それに伴って底板13が、ゴンドラ10の底閉止位置から底開放位置へと、ゆっくりとした回動を開始する。底板13の回動は、連結ピン25が長穴15の下端に達すると停止する。この停止位置が底板13によるゴンドラ10の底開放位置となる。
底板13が底開放位置に達したことを前記第1センサ52が検出すると、運転制御手段50は昇降駆動手段30の運転を停止する。これによって吊り下げ部20は降下を停止し、その位置に保持される。
【0029】
一方、ゴンドラ10が降下停止位置に停止され、且つゴンドラ10の底板が底開放位置に停止状態にあるときに、運転制御手段50により昇降駆動手段30を介して吊り下げ部20の上昇運転を開始する場合は、運転制御手段50は所定の第2速度で吊り下げ部20の上昇を開始させる。吊り下げ部20の上昇が開始されると、連結ピン25が長穴15の下端から第2速度で上昇する。この連結ピン25の上昇に伴い底板13が、ゴンドラ10の底開放位置から底閉止位置へと、ゆっくりとした回動を開始する。底板13の回動は、連結ピン25が長穴15の上端に達すると停止する。この停止位置が底板13によるゴンドラ10の底閉止位置となる。
底板13が底閉止位置に達したことを前記第1センサ52が検出すると、運転制御手段50は昇降駆動手段30を介して吊り下げ部20の上昇速度を第1速度に変更する。これによって、ゴンドラ10は吊り下げ部20と一緒に第1速度で上昇を開始する。ゴンドラ10が所定の荷物積み込み位置まで上昇したことを第2センサ53が検出すると、運転制御手段50は昇降駆動手段30の運転を停止し、吊り下げ部20とゴンドラ10の上昇を停止してその位置に保持する。
【0030】
上記、運転制御手段50による昇降駆動手段30を介した吊り下げ部20の昇降速度の自動変更は、第3センサ54を用いて、その変更のタイミングを得るようにすることができる。
前記第3センサ54による昇降速度の自動変更のタイミングは、例えばゴンドラ10が停止位置決め部材43によって降下停止位置に停止された状態にあるときに、ゴンドラ10の長穴15の上端に連結ピン25があるか否かを、第3センサ54で検出することにより行うことができる。降下停止位置にあるゴンドラ10の長穴15の上端に連結ピン25がある場合、その連結ピン25の位置は条件位置として三次元上において確定されるので、その条件位置に連結ピン25が有るか否かを検出するように第3センサ54を配置構成すればよい。
運転制御手段50は、吊り下げ部10を上昇させているときに、第3センサ54が、連結ピン25を、前記条件位置、即ち降下停止位置にあるゴンドラ10の長穴15の上端位置に検出すると、昇降駆動手段30を介して吊り下げ部20の昇降速度を第2速度から第1速度に増加させる。これによりゴンドラ10の上昇を速やかに行うことができる。なお、第3センサ54による検出から速度変更までに多少の時間的ズレを設けることができる。
運転制御手段50は、吊り下げ部10を降下させているときに、第3センサ54が連結ピン25を、前記条件位置、即ち降下停止位置にあるゴンドラ10の長穴15の上端位置に検出すると、昇降駆動手段30を介して吊り下げ部10の降下速度を第1速度から第2速度に減少させる。これによりゴンドラ10の底板13の回動動作をゆっくりと行うことができ、作業等の安全性を図ることができる。
なお、吊り下げ部10を上昇させる場合の第1速度、第2速度とそれに対応する吊り下げ部10を降下させる場合の第1速度、第2速度とは、同じ速度でなくともよい。
【0031】
前記長穴15の位置と縦方向長さは底板13の姿勢、回動量と1対1対応する。連結ピン25が長穴15の上端位置にある場合に、底板13がゴンドラ10の底を閉止する位置、即ち底閉止位置に丁度位置するよう、長穴15、底板13、リンク腕16の位置や各枢支13b、16a、16bの枢支位置を定め、また連結ピン25が長穴15の下端位置にある場合に、底板13がゴンドラ10の底を適切に開放する位置、即ち底開放位置に丁度位置するよう、長穴15、底板13、リンク腕16の位置や各枢支13b、16a、16bの枢支位置を定める。
前記底板13の底開放位置は、荷物を車両等の荷台に移す場合等を考慮して、底板13が適当な傾斜状態にある方が、底板13が垂直方向に開放しているよりも好ましい場合がある。即ち、荷物を落下排出させるのではなく、底板13で下からガイドしながら斜め方向に排出することで、衝撃なく且つスムーズに、またトラック等の荷台への移行を良好に行える。本発明では前記底板13を回動自在に枢支13bする構成とすることで、底板13の傾斜開放を可能としている。
なお、底板13の底開放位置での傾斜角度を作業時の状況に応じて適切なものに変更調整できるようにするため、前記長穴15は、それに遊嵌された連結ピン25の昇降可能範囲を変更調整できるように構成しておくのがよい。
【0032】
以上の構成からなる荷降ろし装置の操作ないし動作を説明する。
今、廃材等の荷物を積み込むために所定の高さ位置に停止しているゴンドラ10に対して、荷物が積み込まれ、作業者によりリモートコントローラ51を介して降下指令が出されると、運転制御手段50は、昇降駆動手段30を介して予め定めた第1速度でチェーン21を繰り出させ、吊り下げ部20に吊られたゴンドラ10を前記第1速度で降下させる。
ゴンドラ10が下方に降下して降下停止位置に達すると、停止位置決め部材43によってゴンドラ10が停止される。
前記ゴンドラ10が降下停止位置に達して停止した時点において、吊り下げ部20は引き続き降下を継続する。このとき、第3センサ54が、ゴンドラ10が降下停止位置に達したことを連結ピン25の位置から検出し、その情報を運転制御手段50に入力する。第3センサ54から情報を受けた運転制御手段50は、昇降駆動手段30を介して吊り下げ部20の降下速度を第1速度から第2速度に減速する。
前記ゴンドラ10が停止すると、長穴15の上端位置に遊嵌していた連結ピン25は、前記減速された第2速度で降下を開始し、これに伴いリンク腕16を介して底板13が回動を開始する。
連結ピン25が長穴15の下端に達すると、連結ピン25の降下が停止され、底板13の回動も停止される。回動が停止された底板13の位置がゴンドラ10の底開放位置となる。このとき、第1センサ52が、底板13が底開放位置に達したことを連結ピン25の位置等から検出し、その情報を運転制御手段50に入力する。第1センサ52から情報を受けた運転制御手段50は、昇降駆動手段30を介して吊り下げ部20の降下を停止する。
前記底板13が底開放位置まで開放されることで、ゴンドラ10に積まれていた廃材等の荷物の排出が行われる。
【0033】
前記荷物の排出が終り、作業者によりリモートコントローラ51を介して上昇指令が出されると、運転制御手段50は、昇降駆動手段30を介して予め定めた第2速度でチェーン21の巻上げを開始させ、吊り下げ部20を第2速度で上昇させる。
すると、ゴンドラ10の長穴15の下端位置にあった連結ピン25が第2速度で長穴15の上端位置まで上昇する。また連結ピン25にリンクしたリンク腕16を介して底板13が底開放位置から底閉止位置まで回動する。これによってゴンドラ10の底が閉止される。
第3センサ54は、ゴンドラ10が降下停止位置にあって且つ底板13が閉止された状態であることを連結ピン25の位置等から検出すると、その情報を運転制御手段50に入力する。第3センサ54から情報を受けた運転制御手段50は、昇降駆動手段30を介して吊り下げ部20の上昇速度を第2速度から第1速度に増加させる。これによりゴンドラ10は第1速度で上昇する。
ゴンドラ10の上昇中、荷物を積み込むための所定の高さ位置にゴンドラ10が上昇すると、それを第2センサ53が検出する。これによって運転制御手段50が昇降駆動手段30を介して吊り下げ部20の移動を停止する。これによってゴンドラ10が、その位置に停止する。
なお、本装置に重量センサを設けて、ゴンドラ10に一定重量以上の荷物が積み込まれた場合に昇降運転ができないよう、運転制御手段50を構成しておくこともできる。
【産業上の利用可能性】
【0034】
本発明の荷降ろし装置は、ビル等の解体時に廃材等を高所から効率よく地上に降ろして、運搬車両に移し変えたりするのに便利よく用いることができるものとして、産業上利用することができる。
【符号の説明】
【0035】
10 ゴンドラ
11 フレーム
12 金網
13 底板
13a 延長部
13b 枢支
14 メインフレーム
14a 下端部
15 長穴
16 リンク腕
16a 枢支
16b 枢支
20 吊り下げ部
21 チェーン
22 バランスバー
23 連結杆
24 クッションバネ
25 連結ピン
30 昇降駆動手段
40 ガイドレール
41 天井バー
42 摺動金具
43 停止位置決め部材
50 運転制御手段
51 リモートコントローラ
52 第1センサ
53 第2センサ
54 第3センサ
【特許請求の範囲】
【請求項1】
廃材等の荷物をビル等の高所から下方に降ろすのに用いる荷降ろし装置であって、荷物を収容するためのゴンドラと、該ゴンドラを吊り下げる吊り下げ部と、該吊り下げ部を介して前記ゴンドラを昇降させる昇降駆動手段とを有し、前記ゴンドラには回動自在に枢支された底板を設けると共に、該底板を枢軸の周りに底閉止位置と底開放位置とに回動させるためのリンク腕を設け、且つ前記吊り下げ部を前記ゴンドラに対してその昇降方向に一定の遊び区間をもって連結すると共に前記リンク腕とも連結し、ゴンドラの上昇時には、前記吊り下げ部が前記一定の遊び区間を上昇する間に前記リンク腕を介して前記底板を底閉止位置まで回動させると共にその後にゴンドラ全体を上昇動作させ、ゴンドラの下降時には、ゴンドラ全体が降下停止位置まで降下した後、前記吊り下げ部が前記一定距離の遊び区間を下降する間に前記リンク腕を介して前記底板を底開放位置まで回動させる構成としたことを特徴とする荷降ろし装置。
【請求項2】
吊り下げ部とゴンドラとの連結は、ゴンドラを構成するフレームに設けた縦方向の長穴に対して吊り下げ部に設けた連結ピンを遊嵌することで構成し、吊り下げ部とリンク腕との連結は、前記連結ピンに対してリンク腕を連結することで構成してあることを特徴とする請求項1に記載の荷降ろし装置。
【請求項3】
長穴が設けられるフレームは、ゴンドラの幅方向の両側に配置される一対の縦フレームとすると共に該一対の縦フレームを筒状フレームとし、該筒状フレームに対して、前記吊り下げ部の両側から垂下する一対の連結杆を進退自在に挿嵌すると共に、該一対の連結杆にそれぞれ設けた連結ピンを前記長穴に遊嵌し、前記リンク腕は一対とし、その各基端側で前記各連結ピンに連結すると共に、その各先端側でそれぞれ前記底板の両側部に連結して底板を枢軸の周りに回動できるように構成してあることを特徴とする請求項2に記載の荷降ろし装置。
【請求項4】
ゴンドラの昇降を案内するガイドレールをゴンドラの両側に設けると共に、該ガイドレールにゴンドラの降下停止位置を定める停止位置決め部材を設けてあることを特徴とする請求項1〜3の何れかに記載の荷降ろし装置。
【請求項5】
昇降駆動手段による吊り下げ部の昇降は、遊び区間における速度が遊び区間以外での速度よりも遅くなるように構成してあることを特徴とする請求項1〜4の何れかに記載の荷降ろし装置。
【請求項1】
廃材等の荷物をビル等の高所から下方に降ろすのに用いる荷降ろし装置であって、荷物を収容するためのゴンドラと、該ゴンドラを吊り下げる吊り下げ部と、該吊り下げ部を介して前記ゴンドラを昇降させる昇降駆動手段とを有し、前記ゴンドラには回動自在に枢支された底板を設けると共に、該底板を枢軸の周りに底閉止位置と底開放位置とに回動させるためのリンク腕を設け、且つ前記吊り下げ部を前記ゴンドラに対してその昇降方向に一定の遊び区間をもって連結すると共に前記リンク腕とも連結し、ゴンドラの上昇時には、前記吊り下げ部が前記一定の遊び区間を上昇する間に前記リンク腕を介して前記底板を底閉止位置まで回動させると共にその後にゴンドラ全体を上昇動作させ、ゴンドラの下降時には、ゴンドラ全体が降下停止位置まで降下した後、前記吊り下げ部が前記一定距離の遊び区間を下降する間に前記リンク腕を介して前記底板を底開放位置まで回動させる構成としたことを特徴とする荷降ろし装置。
【請求項2】
吊り下げ部とゴンドラとの連結は、ゴンドラを構成するフレームに設けた縦方向の長穴に対して吊り下げ部に設けた連結ピンを遊嵌することで構成し、吊り下げ部とリンク腕との連結は、前記連結ピンに対してリンク腕を連結することで構成してあることを特徴とする請求項1に記載の荷降ろし装置。
【請求項3】
長穴が設けられるフレームは、ゴンドラの幅方向の両側に配置される一対の縦フレームとすると共に該一対の縦フレームを筒状フレームとし、該筒状フレームに対して、前記吊り下げ部の両側から垂下する一対の連結杆を進退自在に挿嵌すると共に、該一対の連結杆にそれぞれ設けた連結ピンを前記長穴に遊嵌し、前記リンク腕は一対とし、その各基端側で前記各連結ピンに連結すると共に、その各先端側でそれぞれ前記底板の両側部に連結して底板を枢軸の周りに回動できるように構成してあることを特徴とする請求項2に記載の荷降ろし装置。
【請求項4】
ゴンドラの昇降を案内するガイドレールをゴンドラの両側に設けると共に、該ガイドレールにゴンドラの降下停止位置を定める停止位置決め部材を設けてあることを特徴とする請求項1〜3の何れかに記載の荷降ろし装置。
【請求項5】
昇降駆動手段による吊り下げ部の昇降は、遊び区間における速度が遊び区間以外での速度よりも遅くなるように構成してあることを特徴とする請求項1〜4の何れかに記載の荷降ろし装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−167468(P2012−167468A)
【公開日】平成24年9月6日(2012.9.6)
【国際特許分類】
【出願番号】特願2011−28452(P2011−28452)
【出願日】平成23年2月14日(2011.2.14)
【特許番号】特許第4777485号(P4777485)
【特許公報発行日】平成23年9月21日(2011.9.21)
【出願人】(511038927)
【出願人】(511038938)
【出願人】(511038949)
【Fターム(参考)】
【公開日】平成24年9月6日(2012.9.6)
【国際特許分類】
【出願日】平成23年2月14日(2011.2.14)
【特許番号】特許第4777485号(P4777485)
【特許公報発行日】平成23年9月21日(2011.9.21)
【出願人】(511038927)
【出願人】(511038938)
【出願人】(511038949)
【Fターム(参考)】
[ Back to top ]